
指向性マイクロフォン
【課題】指向性および耐久性に優れた指向性マイクロフォンの提供。
【解決手段】指向性マイクロフォンは、中央部に空所を有するベース31と、櫛歯電極322,323が形成されている振動板32と、振動板32をベース31の空所上においてベース31に支持するブリッジ11と、ベース31に保持された複数の分割電極23A〜23Dで構成され、櫛歯電極322,323と空隙を有して噛合する櫛歯電極232,233が分割電極23A〜23Dの各々に形成されている固定電極と、を備え、ブリッジ11は、振動板32が音源方向に応じて変位して、櫛歯電極232,233に対する櫛歯電極322,323の位置が変化するように振動板32を弾性支持する複数の弾性部12を有し、振動板32、ブリッジ11および固定電極(23A〜23D)をSOI(Silicon on Insulator)基板の同一Si層により形成したことを特徴とする。
【解決手段】指向性マイクロフォンは、中央部に空所を有するベース31と、櫛歯電極322,323が形成されている振動板32と、振動板32をベース31の空所上においてベース31に支持するブリッジ11と、ベース31に保持された複数の分割電極23A〜23Dで構成され、櫛歯電極322,323と空隙を有して噛合する櫛歯電極232,233が分割電極23A〜23Dの各々に形成されている固定電極と、を備え、ブリッジ11は、振動板32が音源方向に応じて変位して、櫛歯電極232,233に対する櫛歯電極322,323の位置が変化するように振動板32を弾性支持する複数の弾性部12を有し、振動板32、ブリッジ11および固定電極(23A〜23D)をSOI(Silicon on Insulator)基板の同一Si層により形成したことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、指向性マイクロフォンに関する。
【背景技術】
【0002】
従来、振動板の中心の一点を軸で支持し、音圧でその軸の周囲の振動板が振動したときの振動振幅の大小の分布を検出して音源方向を特定するマイクロフォンが知られている。しかし、振動板を長時間振動させたときに、疲労により軸が変形し、音波を受けていないときでも振動板が傾いた状態になってしまうという問題があった。
【0003】
そこで、特許文献1に記載の発明では、振動板の傾きを抑える電極を設け、その電極に電圧を印加して傾きを抑えるとともに、その電圧から音源方向を特定するようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−345130号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、音源方向の特定は可能であるが、振動板の傾きが抑えられるため、マイクロフォンの指向性が阻害されてしまうという問題がある。
【課題を解決するための手段】
【0006】
請求項1の発明は、中央部に空所を有するベース基板と、第1櫛歯電極が形成されている振動板と、振動板をベース基板の空所上においてベース基板に支持する支持部と、ベース基板に保持された複数の分割電極で構成、第1櫛歯電極と空隙を有して噛合する第2櫛歯電極が分割電極の各々に形成されている固定電極と、を備える指向性マイクロフォンであって、支持部は、振動板が音源方向に応じて変位して、第2櫛歯電極に対する第1櫛歯電極の位置が変化するように振動板を弾性支持する複数の弾性部を有し、振動板、支持部および固定電極をSOI(Silicon on Insulator)基板の同一Si層により形成したことを特徴とする。
また、請求項6の発明のように、複数の分割電極と振動板との間の静電容量を、検出部により分割電極の各々に対応して個別に検出し、検出部で検出された各静電容量に基づいて演算部により音源の方向を特定するようにしても良い。
【発明の効果】
【0007】
本発明によれば、指向性および耐久性に優れた指向性マイクロフォンを得ることができる。
【図面の簡単な説明】
【0008】
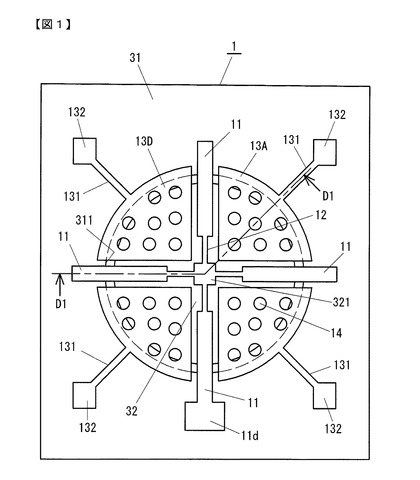
【図1】本実施の形態のマイクロフォン1の正面図である。
【図2】図1のD1−D1断面図である。
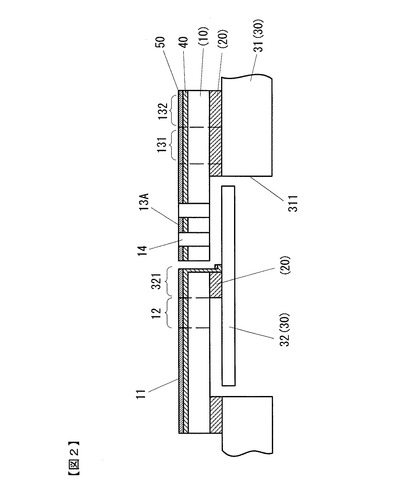
【図3】音源方向による振動板32の傾き発生を説明する図である。
【図4】平行平板型マイクロフォンの基本式導出を説明する図である。
【図5】出力電圧を説明する図である。
【図6】図5の等価回路を示す図である。
【図7】音源方向特定を説明する図である。
【図8】製造工程の工程(a)〜(d)を説明する図である。
【図9】製造工程の工程(e)を説明する図である。
【図10】製造工程の工程(f)、(g)を説明する図である。
【図11】製造工程の工程(h)〜(k)を説明する図である。
【図12】製造工程の工程(l)〜(o)を説明する図である。
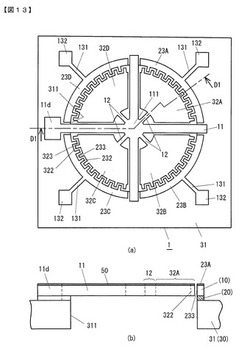
【図13】第2の実施の形態のマイクロフォンを示す図であり、(a)は正面図、(b)はD1−D1断面図である。
【図14】音源からの音波を受けたときの振動板32の様子を示す図である。
【図15】第3の実施の形態のマイクロフォンを示す図であり、(a)は正面図、(b)はD1−D1断面図である。
【図16】音源の方向と振動板32の変位との関係を説明する図である。
【図17】第3の実施の形態の変形例を示す図であり、(a)は第1の変形例を、(b)は第2の変形例を示す。
【図18】第3の実施の形態の変形例を示す図であり、(a)は第3の変形例を、(b)は第4の変形例を示す。
【図19】弾性部12の変形例を示す図である。
【図20】図1に示す振動板32を4つの分割振動板32A〜32Dに分割した場合の構成を示す図である。
【図21】図15に示すマイクロフォンの変形例を示す平面図である。
【図22】櫛歯電極の変形例を示す図であり、(a)は第1の変形例を、(b)は第2の変形例をそれぞれ示す。
【図23】圧力差を説明する図であり、(a)ダイアフラム230の裏面側が密封空間となっている場合を示し、(b)はダイアフラム裏面側の空間が半密封状態となっている場合を示す。
【図24】ギャップ内の圧力差の伝播を説明する図である。
【図25】ギャップ幅と変動体積との関係を示す図である。
【発明を実施するための形態】
【0009】
以下、図を参照して本発明を実施するための形態について説明する。
−第1の実施の形態−
図1,2は、本実施の形態の指向性マイクロフォンの概略構成を示す図である。図1はマイクロフォン1の正面図であり、図2は図1のD1−D1断面図である。マイクロフォン1は、図2に示すように下部Si層30,SiO2層20,上部Si層10の3層構造を有するSOI(Silicon on Insulator)基板を用いて、マイクロマシニング技術、或いはフォトリソグラフィー技術により作製される。
【0010】
下部Si層30により形成されるベース31には、円形開口311が貫通するように形成されている。ベース31の上面側には、円形開口311上に架け渡されるように4本のブリッジ11が十字状に配置されている。各ブリッジ11の一端は、ベース31上に固定されている。各ブリッジ11の他端には、それぞれ弾性部12が設けられている。各弾性部12は、ブリッジ11と振動板32に設けられた支持軸321との間を弾性的に連結している。支持軸321は円盤状の振動板32の中心(すなわち、重心)から垂直に突出するように形成されている。その結果、ブリッジ11は、振動板32を懸架するような形態でその中心部分を弾性的に支持している。
【0011】
ベース31の上面には、開口311の上面を覆うように4つの固定電極13A〜13Dが設けられている。各固定電極13A〜13Dは中心角が90度の扇形をしており、配線部131および端子部132が各々設けられている。ブリッジ11および固定電極13A〜13DはSOI基板の上部Si層10で形成されており、上部Si層10の上面には多結晶シリコン膜40およびアルミ膜50が順に形成されている。このように、本実施の形態のマイクロフォン1は、振動板32と、それと平行に対向配置された複数の固定電極13A〜13Dとを備えたコンデンサーマイクロフォンを構成している。
【0012】
ダイアフラムである振動板32は音圧を受けると振動し、固定電極13A〜13Dと振動板32との間のギャップが音波の周期に従って変化する。また、支持軸321とブリッジ11とが弾性部12によって連結されているため、音圧によって振動板32に外力が加わると弾性部12が撓むことになる。例えば、音源がマイクロフォン1の軸方向(すなわち、円形開口311の軸方向)にある場合には、各弾性部12がほぼ均等に撓んで振動板32全体がマイクロフォン1の軸方向(すなわち、円形開口311の軸方向)に平行状態で変位(振動)することになる。各固定電極13A〜13Dと振動板32との間の静電容量は、振動板32の振動や変位に応じて変化する。
【0013】
一方、図3に示すように音源がマイクロフォン1の中心軸Jに対して斜めに傾いた方向にある場合、振動板32上の位置によって音源からの音波の到達時間や音圧が違うことから、振動板32の法線が音源方向を向くように振動板32が傾く。そして、傾いた状態で音波の出力に応じて振動板32が振動する。
【0014】
ここで、平行平板における静電容量Cは、次式(1)によって表される。式(1)において、Qは電荷、Vは電圧、εは誘電率、Sは電極面積、dは電極間距離である。
【数1】

【0015】
マイクロフォン1においては、電極間距離dは固定電極13A〜13Dと振動板32との距離に対応している。厳密には、振動板32は平行に動くとは限らないので、式(1)をそのまま適用することはできず、また、振動板32の形状に応じた式に変更する必要がある。しかし、固定電極13A〜13Dと振動板32との距離が短くなると静電容量が大きくなり、逆に距離が長くなると静電容量は小さくなることは、平行平板電極の場合と同様である。従って、音源が斜めの方向にある場合には、振動板32が傾いて固定電極13A〜13Dとの距離がそれぞれ異なるため、各固定電極13A〜13Dの静電容量はそれぞれ異なる値となる。
【0016】
図3のように振動板32が傾いている場合、音源により近い固定電極13Aに関する静電容量Caは小さくなり、音源により遠い固定電極13Cに関する静電容量Ccは大きくなる傾向を有する。振動板32は、その傾いた状態を中心として音波の出力に応じて振動する。また、音源の位置によって、静電容量の変化の周期も各固定電極13A〜13Dで異なる。これは振動板32が厳密には剛体ではなく弾性を持つため、音波に対し必ずしも即座に追随せず、音波が最初に届く位置と、最後に届く位置との平面上の位置によって、変化に時間差が生じるためである。
【0017】
次に、マイクロフォン1における信号検出方法について説明する。本実施の形態のような静電容量型のマイクロフォンでは、振動板の変動による静電容量値の変化を負荷抵抗にかかる電圧の信号の形にして取り出す。このように静電変換器として機能するマイクロフォンに関して、以下では、一般的な静電変換器の基本式の導出とその出力電圧について示す。
【0018】
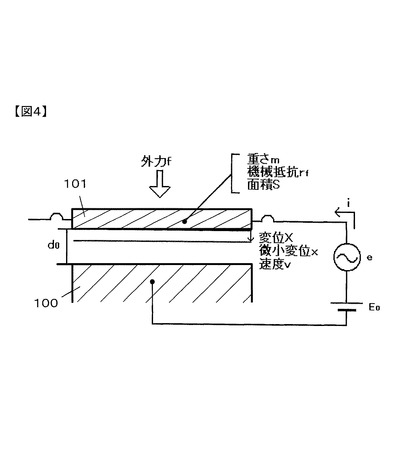
[1.基本式の導出]
ここでは、図4に示すように、狭い間隙を隔てて向かい合った平行平板電極を考える。これは、複数の固定電極13A〜13Dを一つの固定側電極100とすれば、外力により変位する電極101は振動板32に対応する。
【0019】
電極間に印加している直流電圧をE0、交流電圧をe、電極101に作用する外力をf、変位が発生する前の電極間隔をd0とする。また、直流電圧E0を印加したときの電極101の変位をX、微小変位をxとし、電極間に生じる静電容量をC(x)とする。このとき、図4に示すモデル系に対してラグランジュの運動方程式を用いると、ラグラジアンおよび散逸関数はそれぞれ次式(2),(3)のようになる。なお、mは電極101の質量、vは電極101の変位の速さ、kは電極101を弾性支持している部分(弾性部12に相当)のバネ定数、Q0は直流電圧E0を印加することで生じた電荷であり、qは交流電圧eにより生じた電荷であるとする。また、rfは系における機械抵抗である。
【数2】
【0020】
平行平板電極の対向面の面積をSとすると、平行平板電極間に生じる静電容量の式は次式(4)のように表される。また、機械系および電気系のラグランジュ運動方程式は順に式(5)、(6)で表される。
【数3】
【0021】
式(5)に式(2),(3)を代入し展開すると次式(7)が得られる。さらに、式(7)の右辺第3項は、式(8)のように展開される。
【数4】
【0022】
さらに、式(8)をテイラー展開すると次式(9)が得られる。
【数5】
【0023】
式(9)の第1項は静的な項なので、これを取り除き式(7)に代入してまとめると、最終的な式(10)が機械系の基本式として得られる。なお、式(10)において、A,B,C(0)は次式(11)〜(13)で表される。
【数6】
【0024】
同様に、式(6)に式(2),(3)を代入し展開すると、式(14)が得られる。
【数7】
【0025】
式(14)をテイラー展開すると式(15)が得られ、Q0=C0E0を静的項として消去すると、式(16)が得られる。よって、電気系の基本式は式(17)となる。式(17)をフェーザ表示すると、式(18)のようになる。
【数8】
【0026】
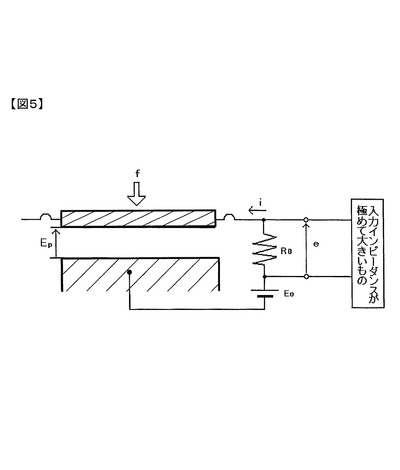
[2.出力電圧]
一般的に、実際に使用する状態においては平行平板電極間にかかる直流電圧Epは、図5に示すように何らかのインピーダンスを通じて供給される。このインピーダンスは、コンデンサーマイクロフォンなどの応用においては通常大きな値を持っている。そのため、電極101の変位により静電容量が変化した場合、直流電圧Ep も変化する。また、平行平板電極の静電容量C0と抵抗R0とによる時定数も相当に大きな値となるため、マイクロフォンとして使用する周波数範囲では電荷の移動はほとんど行われない。
【0027】
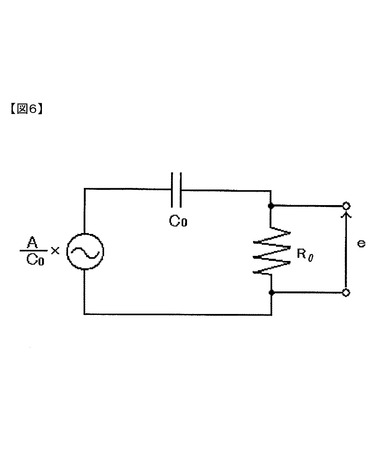
このとき電気系の基本式において、
e=−R0i …(19)
とでき、また、次式(20)が成り立つので、式(19),(20)を式(18)に代入することにより次式(21)が得られる。この等価回路は図6のように書き表すことができる。
v=jω・x …(20)
【数9】
…(21)
【0028】
このように、第1の実施の形態のマイクロフォンによれば、次のような作用効果を奏する。
【0029】
(1)本発明によるマイクロフォンによれば、静電変換を用いて、音波による振動板32の振動に応じた静電容量の変化を、電圧eとして読み取ることができる。図3に示したように、振動板32は音源の方向に応じて法線が音源方向を向くように自動的に傾く。そのため、音源の音波をより効率的に受けることができると共に、非常に指向性の高いマイクロフォンが得られる。また、マイクロフォン全体の向きを変えてやらなくとも、音源の位置に合わせて自動的に指向方向の調整を行うことができる。
【0030】
(2)本実施の形態では、振動板32の中心(重心)に近い位置を複数の弾性部12で支持するようにしているので、振動板32に音圧が作用した際に弾性部12が変形しやすい。そのため、音波に敏感に反応して振動板32が音源方向に傾き、指向性の感度が向上する。さらに、弾性部12を複数設けることで、振動板支持構造の耐久性向上を図ることができる。
【0031】
なお、弾性部12の位置は、振動板32の中心から同心円上において均等な間隔となるような位置に形成されているのが望ましい。ここでいう近傍とは、図1のように支持軸321に直接連結する位置のみに限らず、弾性部12の位置が振動板32の中心からみて振動板32の半径のほぼ半分以下の位置にあることを指す。
【0032】
一方、特許文献1に記載のマイクロフォンの場合には、振動板を中心の1点のみで法線方向に支持している。そのため、音源の方向が法線上に存在する場合には、支持部の軸方向の変形は望めなく、静電容量の変化は振動板の弾性変形のみに依存する。その結果、静電容量の変化が小さいために計測が難しい。また、振動板が傾かないような制御を行わない場合、傾くことによる繰り返し応力が一点に集中し、繰り返し疲労を起こして破損するおそれもある。
【0033】
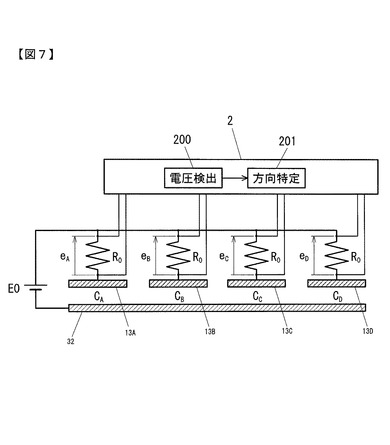
上述した基本式および出力電圧の説明では、複数の固定電極13A〜13Dを一つの固定電極とするひとつのコンデンサとして静電容量変化を出力電圧の変化として取り出した。しかし、各固定電極13A〜13Dに対応する4つのコンデンサが並列接続されているものとして、各コンデンサの静電容量変化を出力電圧の変化として取り出すようにしても良い。その場合、上述した静電容量C0に代えて、各コンデンサの静電容量CA0,CB0,CC0,CD0を考えることになる。
【0034】
図7に示すように抵抗R0を各固定電極13A〜13Dにそれぞれ直列に設け、各抵抗の電圧eA〜eDを音源方向特定部2の電圧検出回路200によって検出する。各電圧eA〜eDは、式(21)の静電容量C0を各静電容量CA0,CB0,CC0,CD0で置き換えることにより得ることができる。各固定電極13A〜13Dの容量変化や変化の周期はこれらの電圧eA〜eDに反映されるため、方向特定回路201では、これらの電圧eA〜eDに基づいて音源の方向を特定する。例えば、各電圧eA〜eDの平均値の大きさを比較した場合、電極間距離が小さな固定電極ほど平均電圧が大きくなるので、それらの平均値の大小を比較することで音源方向を特定することができる。
【0035】
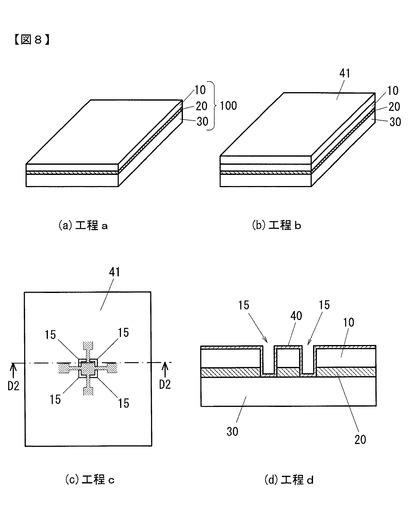
次に、図1に示したマイクロフォンの製造工程について、図8〜12を参照して説明する。まず、図8(a)に示す工程(a)では、下部Si層30,SiO2層20,上部Si層10の3層構成を成すSOIウエハ100を準備する。各層30,20,10の厚さは、例えば、順に500μm,1μm,25μmのように設定される。図8(b)の工程(b)では、上部Si層10の表面にレジスト41を塗布する。レジスト41は、例えば、スピンコーターにより3000rpm,30secの条件で塗布され、90℃,5minの条件でベークされる。
【0036】
図8(c)に示す工程(c)では、支持軸321の四隅部分に対応したパターン15を有するマスクを用いて、レジスト41に対して紫外線露光を4.0sec行い、現像を1.5min行って、パターン15部分のレジスト41を除去する。その後、ICP−RIE(inductively coupled plasma - reactive ion etching)により、パターン15部分の上部Si層10をエッチングし、SiO2層20の面を露出させる。ICP−RIEは、0.05〜1Paの比較的低い圧力下で、高密度プラズマ中のプロセスガスのイオンと試料表面との化学反応を利用して試料をエッチングするものであり、異方性の高いエッチング加工ができる。プロセスガスとしては、CCl2F2あるいはCF4等の酸化性ガスが用いられる。
【0037】
図8(d)に示す工程(d)では、硫酸過水(H2SO4+H2O2)により90℃−5min洗浄してレジスト41を除去し、強フッ酸により露出しているSiO2層20をエッチング除去する。その後、LPCVD(low pressure chemical vapor deposition)により、多結晶シリコン膜40を600nm堆積させる。 図8(d)は、LPCVD処理後の基板断面を示す図であり、図8(c)のD2−D2断面に対応する断面を示したものである。パターン15部分のSi層10およびSiO2層20にはエッチングにより溝が形成されており、その溝内の表面にも多結晶シリコン膜40が形成されている。
【0038】
LPCVDは、10〜103Paの減圧下で試料を加熱し、熱エネルギーによる気相化学反応で試料表面に膜を生成させる成膜方法である。この方法は、膜の着き回りに優れ、均一な膜厚が得られるという長所がある。多結晶シリコンの成膜では、プロセスガスとしてSiCl4+H2あるいはSiH4が用いられる。多結晶シリコン膜40を成膜するのは、支持軸321と振動板32との結合を強化するためである。さらに、結合位置にコンタクトホールを設けておき、多結晶シリコン膜を成膜すれば、アンカー効果が期待できる。
【0039】
多結晶シリコン膜40の成膜後に、OCDレジストをスピンコーターにより4000rpm,30secの条件で塗布し、150℃,30minの条件でベークした後に、1000℃,30minの条件でリン(P)の熱拡散処理を行う。多結晶シリコン膜40へのリン(P)の熱拡散により、多結晶シリコン膜40の電気抵抗は小さくなる。熱拡散処理の後に、BHF液により5min洗浄し、OCDレジストを除去する。
【0040】
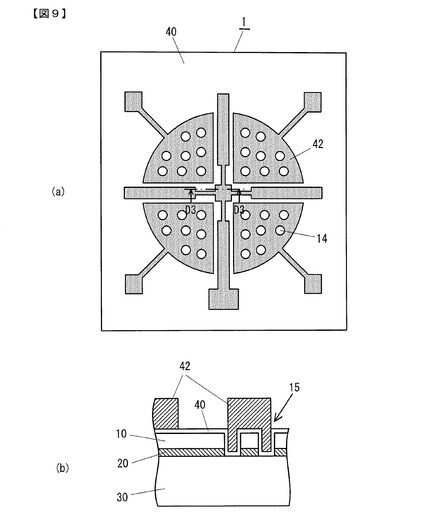
図9に示す工程(e)では、厚膜レジストによるレジストパターン42を形成する。厚膜レジストは、スピンコーターにより2000rpm,25secの条件で塗布され、その後、110℃,10minの条件でベークされる。そして、紫外線露光を60sec行い、現像を2min行うことにより図9(a)に示すようなレジストパターン42が形成される。図9(b)はD3−D3断面図である。
【0041】
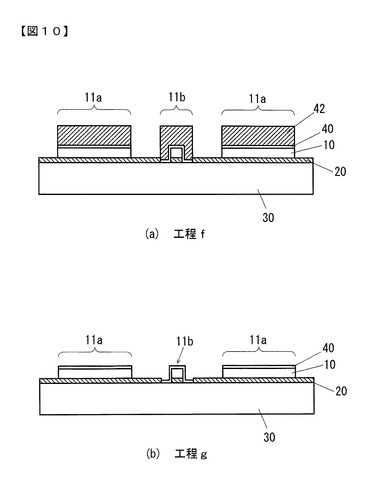
図10(a)に示す工程(f)では、ICP−RIEにより、上部Si層10と多結晶シリコン膜40をエッチングし、ブリッジ11の、固定電極13、固定電極13の孔14を形成する。図10(b)の工程(g)では、硫酸過水により90℃−5min洗浄して厚膜レジスト42を除去する。最表面には多結晶シリコン膜40が存在する。その後、工程(f)でエッチングした側の面を保護するために、表面側に再び厚膜レジスト42を塗布し、ベークする。
【0042】
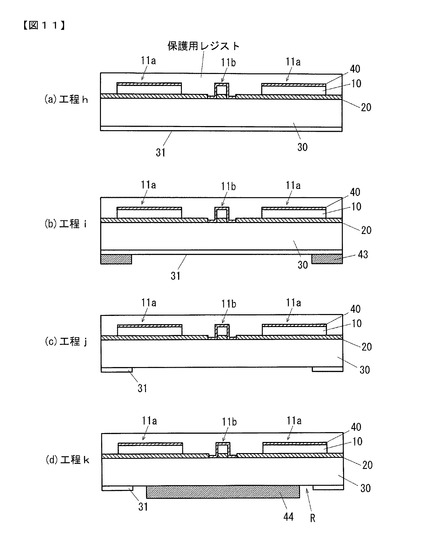
上記の一連の工程でコンデンサーマイクロフォン1の上側の構造が一通り完成し、次に、下側の構造を作製する。図11(a)の工程(h)では、真空蒸着により下部Si層30にアルミニウム(Al)層31を厚さ0.1μm形成する。図11(b)の工程(i)では、Al層31の表面にレジストをスピンコーターにより、3000rpm,30secの条件で塗布する。そして、90℃,5minの条件でベークした後に、紫外線露光を4.0sec、現像を1.5min行って、レジストパターン43を形成する。なお、このレジストパターン43は円形開口が形成されたパターンである。
【0043】
図11(c)の工程(j)では、混酸P液(H3PO4+HNO3+CH3COOH+H2O2)に2min浸漬することにより、Al層31にパターン形成のためのエッチングを行い、さらに、RIE、すなわち酸素ガスを用いたアッシングにより、レジスト43を除去する。
【0044】
図11(d)の工程(k)では、下部Si層30のAl層31を除去した面に、厚膜レジストをスピンコーターにより2000rpm,25secの条件で塗布する。そして、110℃,5minの条件でベークした後に、紫外線露光を60sec、現像を2min行ってレジストパターン44を形成する。レジストパターン44は円形パターンであり、レジストパターン44とレジストパターン43との間にはリング状の隙間領域Rが形成されることになる。
【0045】
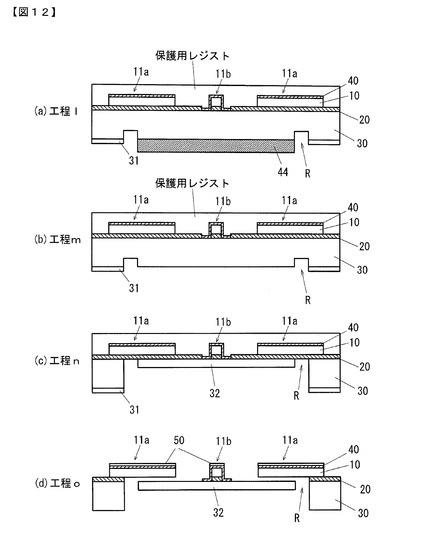
図12(a)に示す工程(l)では、ICP−RIEにより下部Si層30をリング状に約55μmエッチングする。このエッチング量が振動板32の厚さを決定する。図12(b)の工程(m)では、リムーバ(レジスト剥離液)により、厚膜レジスト44を除去する。このとき、基板上面側に塗布されている保護用厚膜レジスト(図11参照)も剥離されるため、再度、保護用厚膜レジストを形成する。
【0046】
図12(c)の工程(n)では、ICP−RIEによりAl層31をマスクとして下部Si層30を約445μmエッチングする。これにより、下部Si層30に形成された円形空洞内に、厚さ55μmのSiの振動板32が形成される。図12(d)に示す工程(o)では、硫酸過水により90℃−5min洗浄した後に、強フッ酸によりSiO2層20を除去する。これにより、振動板32は、固定電極13から完全に分離される。最後に、ブリッジ11および固定電極13の上面にAl金属層50を形成する。
【0047】
一般的に、ダイアフラムの振動により音声を検出するマイクロフォン(音響トランスジューサ素子)においては、振動板としてのダイアフラムの表裏間に発生する圧力差が重要となる。本実施の形態では、下部Si層30から成るベース31の円形開口311内に、同じ下部Si層で形成された振動板32が配置され、その振動板32が音圧によって振動する構造を有している。このように、振動板32の表側空間と裏側空間とが振動板32とベース31との隙間を介して連通している構造において、振動板32の表裏間に十分な圧力差を発生させるためには、隙間のギャップ寸法を最適な値に設定する必要がある。
【0048】
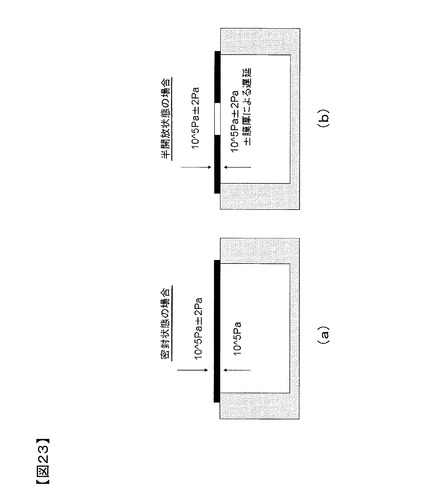
例えば、図23(a)に示すようにダイアフラム230の裏面側が密封空間となっていた場合と、図23(b)に示すようにダイアフラム230に穴230aが形成されていて、ダイアフラム裏面側の空間が半密封状態となっている場合とを考察する。
【0049】
空気は流体であり粘性を有するので、物質表面においては空気の速度は0に等しく、表面から離れるにつれて徐々に本来の音速にまで速度は復帰すると考えることができる。 物質表面からみて、 空気が音速未満 (音速の 99%以下)に低下している領域を速度境界層と呼ぶ。流体音場におかれた物体の表面が流体粒子の振動速度に垂直でない場合、その物体の表面に厚さδ= (2ν/ω)^0.5 の速度境界層が生じる。ここで、速度境界層とは、音速が壁の影響で遅くなっている領域である。ν は空気の動粘性係数、ω は音波の角周波数である。
【0050】
図23(b)で示すように、音響的にみて充分に大きな穴ないし隙間が空いている半開放系の場合、圧力変動は音速で表裏まで伝わる。 そして音波の一周期における音波を受けた平板の表裏間の圧力差は、音の疎密の度合いに対する平板の厚み分のみが寄与し、力としては非常に弱い。仮に音圧による空気の圧力変動Pを1Pa(94dB時)とすると、厚みが20μmの平板の表裏では、図23(a)のように密封ないしそれに近い状態の場合は、 平板に加わる圧力はそのまま最大1Pa分の準正弦波的変動を示す。しかし、図23(b)のように十分に大きな隙間が空いている半開放系の場合は、表裏の圧力差は単純に音波が厚みの分を移動するだけの差のみである。
【0051】
例えば、常温常圧において、音圧2Pa、周波数1kHzの音波であれば、音は一周期辺り1msであり、その間に圧力変動は一波長分、つまり約34cm分進む。音速の音波の圧力変動が平板の厚さ20μmを通り抜けるのに要する時間は59nsである。圧力変動が正弦波的に変動するとして、疎密変動の各周波数をω、時間をtとすると、表裏の圧力差δPは、
δP=(P0+Psinω(t+59ns))-(P0+Psinωt)
で表される。59nsという値は周期1msに対して約17000分の一であり、位相にして約0.021°であるから、この条件下ではδPはPに対して最大でも約2500分の一以下となり、半開放状態では密閉状態に対して明らかに圧力差が小さいことが分かる。そのため、一般に穴が開いていた場合、音波をうける振動体としては感度が小さすぎ、入力された音波が共振周波数であるような特別な状態のときのみ反応する。
【0052】
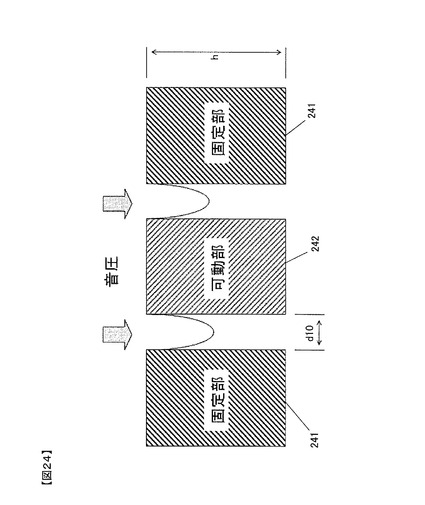
一方、平板上の穴の半径またはギャップの間隔の1/2が速度境界層以下であるなら、その隙間を通る音波は本来よりも遅く伝播されると言える。図24はギャップ内の圧力差の伝播を説明する図であり、固定部241はベース31に対応し、可動部242は振動板32に対応している。この隙間(ギャップ)d10が充分に狭く、また平板の厚みhがギャップに対して充分に厚い場合には、ギャップ内の圧力差の伝播は、広い自由空間に対して遅延が生じるため、圧力変動は音速では伝わらない。
【0053】
そのため、音波を受けた場合の平板の表裏での圧力差は、厚み分の差でなく、音波自体の音圧と平衡状態との差であるとみなすことができる。少なくとも、ギャップを空気が通り抜ける際に生じる粘性抵抗は、充分に大きな穴ないし隙間がある場合よりも大きいため、音波による力は可動電極に伝わりやすくなる。また、スクイーズフィルムダンピング効果によって、可動電極は平面に平行な方向には動きにくくなり、垂直な方向に動く。そして、この隙間が3μm以下であり、かつ厚みがその5倍以上である場合に、20Hz〜20kHzのいわゆる可聴帯域において、図23(b)に示すような穴あき平板が、隙間無く空気を遮断した密封型ダイアフラムと同様に音圧をうけて振動することを確認した。
【0054】
例えば、20kHzにおいて音響境界層厚みは約15.7μmであり、隙間の幅が3μmであるならば、隙間を通る音波の伝播速度は25℃時に最大でも3.18m/sとなり、本来の音速に対して1/100以下にまで低下する。隙間の幅が1μmであれば、音波の伝播速度は0.35m/sにまで低下し、およそ1/1000程度となる。この速度になると、圧力変動の到達位置は1周期あたり20kHzにおいて約17μmであり、電極の厚みが17μm以上ある場合は裏面に到達さえしないことになる。これらの結果、実用上無視できないオーダーの音響抵抗が生じる。
【0055】
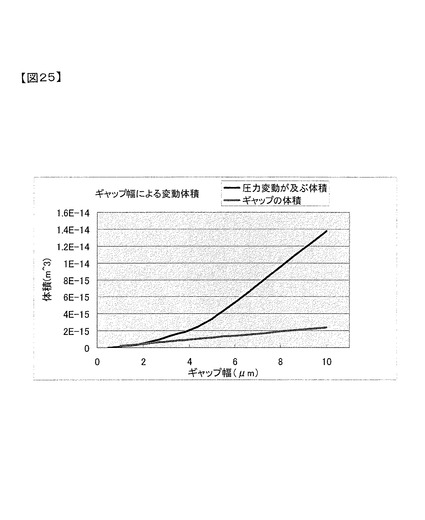
さらに、ギャップの幅によって音速が変化し、図25に示すように、音波の圧力変動に影響される体積も、ギャップの幅によって変化することが分かった。一周期あたりの圧力変動の影響範囲が、元のギャップの体積よりも充分に大きい場合、音波はそのギャップを貫通するとみなすことができる。ギャップ幅d10が4μm 以上になると、音波による圧力変動は2 倍を超えるため、音波の遮断効果が低下する。そのため、本発明では充分な効果を得られるギャップ幅を3μm 以下とする。また、ギャップが狭すぎると、今度は壁面への接触の可能性が生じる。一般的なICP−RIE 加工を用いる場合、壁面の粗さは200nm 以下程度となるため、可能であれば0.5μm 以上のギャップがあることが望ましい。
【0056】
すなわち、平板を可動部と固定部に分割し、可動部と固定部のギャップを0.5μm 以上かつ3μm以下とし、可動部と固定部のギャップを構成する縁部分の厚みをギャップの5倍以上とすることが、感度向上のためには望ましい。そのような構造とすることで、音圧を十分に読み取りうるセンサを構成することが可能となる。
【0057】
−第2の実施の形態−
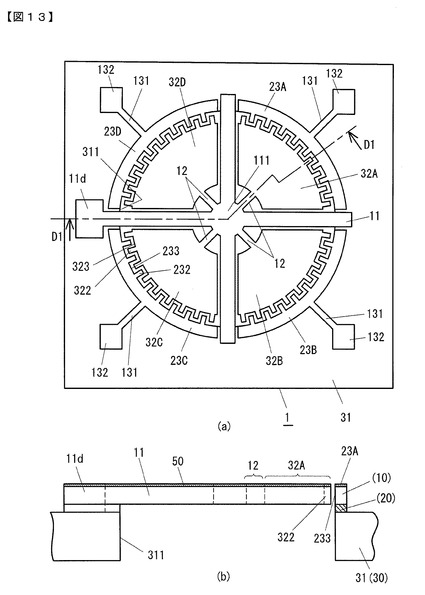
図13は、本発明に係る指向性マイクロフォン1の第2の実施の形態を示す図である。図1に示したマイクロフォン1は、固定電極13A〜13Dと振動板32とが平行に対向配置された平行平板型のコンデンサーマイクロフォンを構成していた。一方、図13に示すマイクロフォン1は、櫛歯電極型のコンデンサーマイクロフォンを構成している。なお、図1の場合と同様の構成要素には同様の符号を付した。
【0058】
図13において、(a)はマイクロフォン1の平面図であり、(b)はD1−D1断面図である。本実施の形態では、振動板は略扇形状の4つの分割振動板32A〜32Dにより構成され、それぞれSOI基板の上部Si層10により形成され、一方、ブリッジ11は十字形状を成し、十字の各先端部分はベース31上に固定されている。ブリッジ11には端子部11dが設けられている。ブリッジ11の中心部111の側面には、4本の弾性部12が放射状に設けられており、これらの弾性部12によって各分割振動板32A〜32Dがそれぞれ支持されている。各分割振動板32A〜32Dの円弧状部分には複数の凹凸からなる櫛歯電極322,323が形成されている。
【0059】
一方、ベース31上には、櫛歯電極322,323と対向するように固定電極23A〜23Cが形成されている。図1に示すマイクロフォン1の場合と同様に、固定電極23A〜23Dは上部Si層10により形成されている。各固定電極23A〜23Dにも櫛歯電極232,233が形成されている。固定電極23A〜23Dは、それらの櫛歯電極232,233と振動板32の櫛歯電極322,323とが隙間を介して噛合するように、それぞれ配置されている。各固定電極23A〜23Dには配線部131を介して端子部132が設けられている。
【0060】
なお、櫛歯電極232,233と櫛歯電極322,323とのギャップ寸法についても、第1の実施の形態で説明したギャップの場合と同様のことが言える。すなわち、櫛歯電極232,233と櫛歯電極322,323とのギャップ寸法を0.5μm 以上かつ3μm以下とする。また、櫛歯電極部分の厚みも、ギャップの5倍以上とする。
【0061】
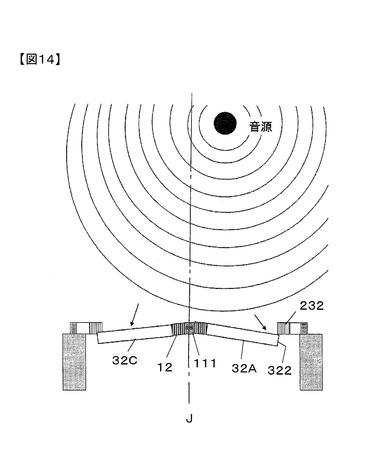
図14は、音源からの音波を受けたときの振動板の様子を模式的に示す図である。図3に示す場合と同様に、音源はマイクロフォン1の中心軸Jに対して斜めに傾いた方向にある。各分割振動板32A〜32Dが音波による音圧を受けると、受けた音圧の大きさに応じて各弾性部12が撓み、分割振動板32A〜32Dはブリッジ11の中心部111を支点として変位して振動する。その結果、対向している一対の櫛歯電極が上側にずれて噛み合いの面積が変化し、静電容量が変化する。これは、上述した式(1)においては、電極面積Sの変化に相当する。櫛歯電極の場合、電極対向面が凹凸形状となっているため、電極面積を大きくすることができ、感度の向上が図れる。
【0062】
図14に示す場合には、分割振動板32Cよりも分割振動板32Aの方が音源に近いので、作用する音圧がより大きく、静電容量の変化もより大きくなっている。このように、音源の方向に応じて各分割振動板32A〜32Dに関する静電容量が変化するので、各分割振動板32A〜32Dに関する静電容量の変化の大きさを比較することで、音源の方向を特定することができる。さらに、振動板を複数の分割振動板32A〜32Dに分割して独立に音波を受信するようにしているので、図1のように一つの振動板32の場合に比べてより正確に音源特定を行うことができる。また、マイクロフォン全体の向きを変えてやらなくとも、音源の位置に合わせて自動的に指向方向の調整を行うことができる。
【0063】
なお、音声信号検出の方法に関しては第1の実施の形態と同様であり、ここでは説明を省略する。本実施の形態では、振動板を4つに分割しているが、分割数は4に限らず複数であれば良い。固定電極の数は分割振動板の数と同数とするが、固定電極の数だけ信号を出力することができるので、分割振動板の数よりも大きくても良い。分割振動板の数を多くして固定電極の数を多くした方が、音源方向特定をより細かく行うことができる。
【0064】
振動板と固定電極とをギャップを介して平行に配置した平行平板型のマイクロフォンの場合には、静電容量の確保のために振動板の面積を大きくすると共に、できるだけ固定電極と振動板(ダイアフラム)とのギャップを小さくし、かつ、感度確保のために、振動板を薄膜のダイアフラムにする必要がある。しかし、ギャップ形成時にスティッキングを起こしてしまい歩留まりの悪化を招くほか、犠牲層エッチングや洗浄技術などを要し、また、大量のマスクを必要とする。
【0065】
一方、第2の実施の形態では、平行平板型のダイアフラム構造の代わりに、静電容量部を櫛歯型電極構造とすることにより、薄膜の狭ギャップ構造を形成することなく、静電容量を確保することが可能になる。また、分割振動板32A〜32D、ブリッジ11、弾性部12および固定電極23A〜23Dは、同一の上部Si層10により同時に形成される。そのため、第1の実施の形態のマイクロフォンに比べて加工工程が簡略化される。これらの構成要素は図8(c)に示す工程(c)のエッチング加工により同時に形成され、その後、裏面側から下部Si層30をエッチング加工して円形開口31を形成する。
【0066】
また、傾き変位に対する静電容量の変化が平行平板型に比べて大きいので、傾き検出感度が向上する。櫛歯型電極センサにおいてはギャップの変更は容易であり、薄膜に比べスティッキングなどの歩留まり不良の発生確率も低く、近年のDeep-RIE技術の発展により簡易に狭ギャップを形成できるため、静電容量変化の高いセンサを作成可能である。
【0067】
−第3の実施の形態−
上述した第1および第2の実施の形態では、音源が斜め方向にある場合には、振動板はベース31の面に対して傾くように変位した。一方、本実施の形態では、振動板がベース31の面に平行に変位するような構成としている。
【0068】
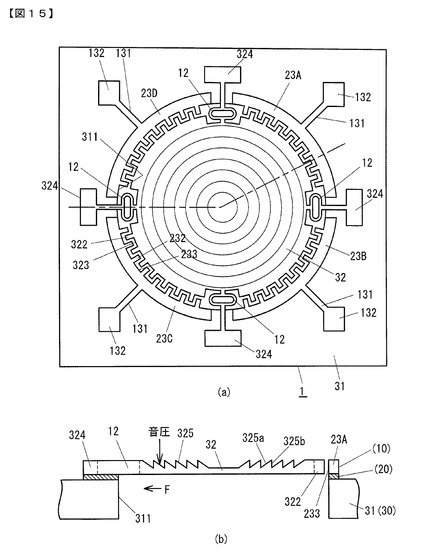
図15はマイクロフォンの第3の実施の形態を示す図であり、マイクロフォン1は、第2の実施の形態と同様に櫛歯電極型のコンデンサマクロフォンを構成している。ただし、振動板は、分割振動板ではなく円形状の1つの振動板32で構成されている。振動板32の櫛歯電極322,323に対向するように、櫛歯電極232,233を有する4つの固定電極23A〜23Dがベース31上に設けられている。振動板32は、4つの弾性部12によって開口311上に弾性的に支持されている。弾性部12は、振動板32がベース31に平行に変位しやすいように、長円形状の梁構造をしている。
【0069】
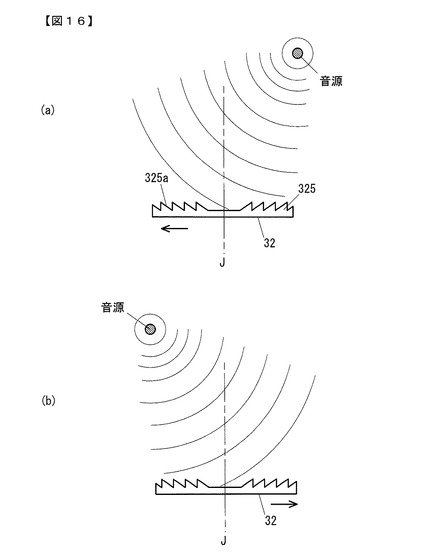
振動板32の音波入射面すなわち開口311と反対側の面には、フレネルレンズのような溝325が形成されている。円形の溝325の断面形状は鋸刃状になっており、複数の溝325が振動板32の中央を中心として同心円状に複数形成されている。なお、図15では、溝325の中心側の面325aが斜めに傾斜した面で、外側の面325bは垂直な面となっているが、反対に、中心側の面325aが垂直面で、外側の面325bが斜面であっても構わない。
【0070】
振動板32の図示左側領域の斜面325aに対して垂直に音波が入射して音圧が作用すると、振動板32に対して左向きの力Fが作用することになる。逆に、右側領域の斜面325aに音波が入射して音圧が作用すると、振動板32には右向きの力が作用することになる。そのため、図16(a)に示すように振動板32の中心軸Jに対して右斜め上方の音源から、振動板32に音波が入射すると、振動板32は全体として左方向の力を受けて左側に変位することになる。逆に、図16(b)に示すように光源が中心軸よりも左側にある場合、振動板32は全体として右方向の力を受けて右側に変位することになる。
【0071】
その結果、音源方向と反対方向の櫛歯電極部分の隙間が狭くなり、その領域の静電容量が大きくなる。例えば、図15(a)において、振動板32が左方向に変位すると、固定電極23C,23Dに関係する静電容量が大きくなり、逆に固定電極23A,23Bに関する静電容量が小さくなる。そのため、固定電極23C,23Dの静電容量変化は、音源方向からの音波に大きく依存することになり、マイクロフォンは音源方向の指向性を有することになる。ただし、音圧による力成分は水平方向だけでなく垂直方向もあるため、垂直方向成分の分布状況に応じて振動板32は傾く。そのため、静電容量変化は上述したものから若干異なる。また、図15では振動板32の音波入射面に斜面325を形成したが、入射面が平面であってもよい。すなわち、平面であっても音圧の分布によって振動板32が傾き、結果的に横方向(水平方向)の力が作用するようになり、振動板32が横方向に移動することになる。いずれにしても、自動的に音源方向に指向性が調整されることになる。さらに、櫛歯電極の場合、第2の実施の形態のように櫛歯が上下方向にずれるのではなく本実施の形態のように対向方向に変位した場合のほうが静電容量の変化が大きくなる。そのため、検出感度の向上を図ることができる。
【0072】
また、固定電極23A〜23Dの間の静電容量の差違を比較することにより、音源方向を特定することができる。さらに、上述した場合と同様に、櫛歯電極の対向方向に振動板が変位した場合には静電容量の変化が大きくなるため、音源方向特定の方向分解能をより高めることができる。
【0073】
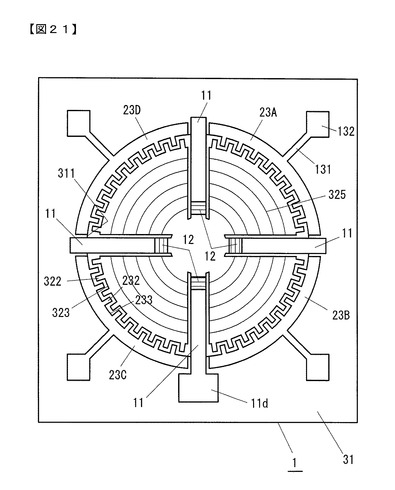
図15に示す例では、振動板32の周辺部分の4箇所を弾性部12で弾性支持したが、図21に示すように、振動板32の中央に近い部分を弾性部12で支持するようにしても良い。図21ではブリッジ11の先端部分に弾性部12を設け、それらの弾性部12により振動板32を支持するようにした。その他の構造は、図15に示したものと同様である。このように中央に近い部分を支持することで、音圧によって振動板32が平行移動するだけでなく、振動板32が斜めに傾き易くなる。弾性部12の構造は図15と同様の構造でも良いし、後述する図19の(a)〜(d)に示すような構造を採用しても良い。
【0074】
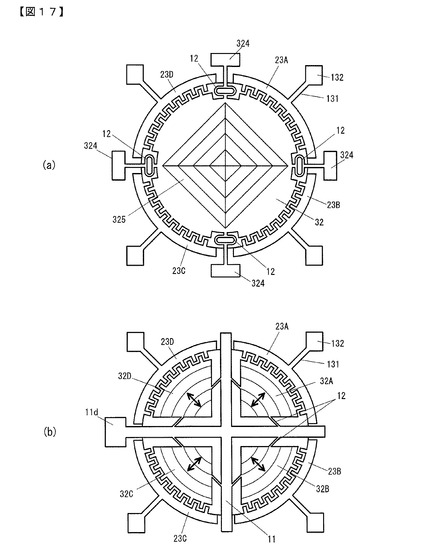
溝325の平面形状は図15に示すような同心円形状に限らず、様々な形態が可能である。例えば、図17(a)に示す変形例1のように方形に配置しても良い。また、斜面325aの法線方向を特定方向に向けて、特定の方向からの音波に対して感度を高めることも可能である。なお、鋸刃状の溝は、グレーマスク技術によってエッチング速度に差をつけることで形成することができる。また、特定の方向に向いた斜面のみを形成する場合には、ウェットエッチングでも形成可能である。
【0075】
図17(b)は変形例2を示す図であり、振動板32を4つの分割振動板32A〜32Dに分割し、それらを個別に弾性部12で支持するようにした。十字形状のブリッジ11からは、各分割振動板32A〜32Dに対して2本の弾性部12がそれぞれ接続されている。一対の弾性部12は各分割振動板32A〜32Dが径方向に変位しやすいように構成されている。
【0076】
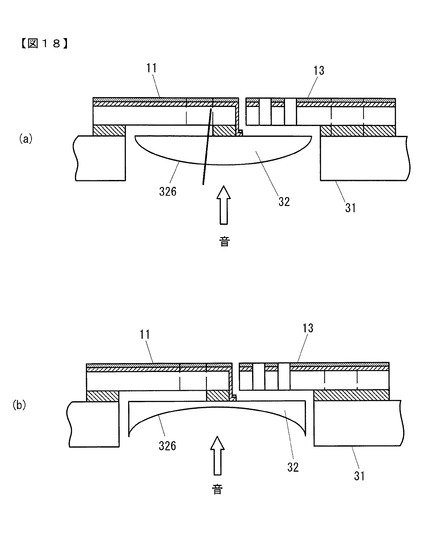
図18(a)に示す変形例3では、図15に示したマイクロフォンとは逆にベース31側から音波が入射する構成になっている。すなわち、振動板32の底面326側に音波が入射する。その他の構成については、上述した第3の実施の形態と同様である。底面326は、音源方向に対する指向性を高めるために斜面で構成されている。底面326は、中央部が凸形状となるような凸面になっている。そのため、例えば、下方から上方への空気の流れがあっても空気抵抗が低減されるような底面形状となっており、空気の流れの影響を低減することができる。
【0077】
なお、図18(a)に示す変形例3では、中央部から周辺部にかけて斜面の傾きが徐々に大きくなっているが、円錐面のような底面326でも良い。
【0078】
図18(b)に示す変形例4では、底面326は凹面を成している。そのため、集音効果の向上を図ることができる。
【0079】
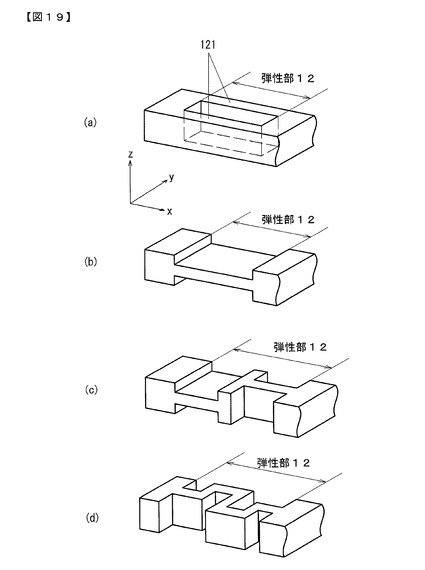
弾性部12の形態としては、図1に示したような梁構造のものや、図15に示したような長円形状の梁構造の他に、図19に示すような梁構造が考えられる。図19(a)に示す弾性部12は、2本の直線状の梁121で構成されている。この弾性部12は、図のy方向に撓みやすい構造である。図19(b)に示す弾性部12では、梁の厚さ(z方向寸法)を薄くしてバネ定数を小さくしている。この構成の場合上下方向(z方向)に撓みやすいので、上下に傾くような構成の振動板32の支持に適している。
【0080】
図19(c)に示す弾性部12は、図1に示す弾性部12を構成する梁と、図19(b)に示す梁とを直列に接続した構成を有している。そのため、z方向およびy方向の両方に撓みやすい構造となっている。図19(d)に示す弾性部12は、y方向に折り返された蛇腹構造の梁構造を有している。そのため、y方向に撓みやすいとともに、x方向にも変位しやすいという利点を有している。なお、蛇腹の折り返し方向をz方向とすれば、z方向に撓み易いと共にx方向に変形し易い。
【0081】
以上説明した実施の形態は、次のような作用効果を奏する。
(1)中央部に開口311を有するベース31と、ベース31の開口311上に架け渡されているブリッジ11と、ブリッジ11の中央部で支持軸321を介して弾性支持されている振動板32と、開口311に振動板32と空隙を設けて対向配置され、ベース31に保持されている固定電極13A〜13Dを複数備え、ブリッジ111の中央部に設けられ、音波の入射によって振動板32の入射面が音源方向に応じて傾くように、振動板32の支持軸321を側方から弾性支持する複数の弾性部材32とを備える。その結果、音源方向の音波に関する集音特性が向上し、指向性の高いマイクロフォンが得られる。また、マイクロフォン全体の向きを変えてやらなくとも、音源の位置に合わせて自動的に指向方向の調整を行うことができる。さらに、複数の弾性部12によって振動板32を支持しているので、従来のような一点支持構造に比べて支持部分の耐久性向上を図ることができる。
(2)指向性マイクロフォンは、中央部に開口311を有するベース31と、ベース31の開口311上に架け渡されているブリッジ11と、複数に分割された分割振動板32A〜32Dのそれぞれがブリッジ11の中央部で弾性支持されている振動板32と、開口311に分割振動板32A〜32Dと空隙を設けて対向配置され、ベース31に保持されている電極13A〜13Dを複数備えて構成される固定電極と、音波の入射によって複数の分割振動板32A〜32Dのそれぞれの入射面が音源方向に応じて傾くように、ブリッジ11の中央部に設けられた中心部111の側周に分割振動板32A〜32Dを各々弾性支持する複数の弾性部12とを備える。複数の分割振動板32A〜32Dが各々傾くことにより、より指向性が向上する。
(3)振動板32には櫛歯電極322,323が形成されていて、その振動板32は、入射する音波の方向に応じて変位するように、ベース31の開口311上において複数の弾性部12により弾性支持されている。また、固定電極はベース31に保持された複数の分割電極23A〜23Dで構成され、櫛歯電極322,323と空隙を有して噛合する櫛歯電極232,233が分割電極23A〜23Dの各々に形成されている。櫛歯電極とすることで静電容量の変化を大きくすることができ、検出感度の向上を図ることができる。さらに、振動板32、弾性部12および固定電極をSOI(Silicon on Insulator)基板の同一Si層により形成したことにより、エッチング加工が簡略化されると共に、マイクロフォンの小型化を図ることができる。
(4)なお、図13に示すように、振動板32を複数に分割し、それらが音圧により傾くように構成しても良いし、図15や図17(b)に示すように振動板32、32a〜32dが面方向(すなわち、面と平行な方向)に変位するように構成しても良い。図17(b)の構成の場合、振動板が複数の分割振動板32a〜32dに分割することで、指向性のさらなる向上を図ることができる。
(5)振動板32をその面方向に移動可能に弾性支持し、振動板32の音波入射面に斜面325を形成することで、音圧の作用により振動板を櫛歯電極の対向面方向に変位させるようにしても良い。その結果、振動板の変位に対する静電容量変化を大きくすることができ、マイクロフォンの指向性および音源方向特定性能を向上させることができる。
(6)複数の固定電極23A〜23Dと振動板32との間の静電容量を、固定電極23A〜23Dの各々に対応して電圧検出回路200により電圧として個別に検出し、その電圧に基づいて歩行特定回路201において音源の方向を特定する。このように構成することで、一つのマイクロフォンで音源の特定を行うことができる。
【0082】
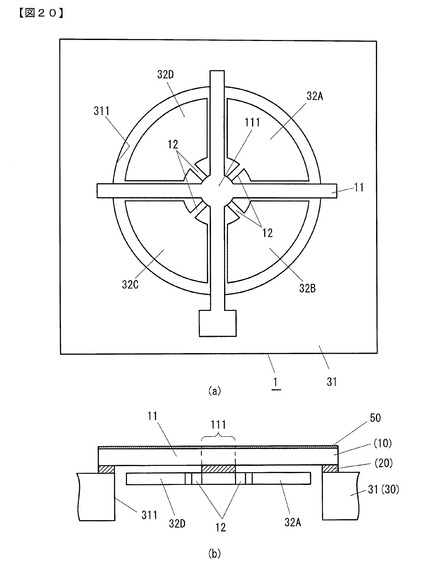
上述した実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例をどのように組み合わせることも可能である。例えば、図1の振動板32を、図20に示すように、固定電極13A〜13Dに対向する4つに分割振動板32A〜32Dに分割しても良い。図20では、振動板32の形状が分かりやすいように、固定電極13A〜13Dを省略してマイクロフォンの構成を示したものである。ブリッジ11の中心部111は分割振動板32A〜32Dの支持軸を構成し、その側周に弾性部12がそれぞれ放射状に設けられている。分割振動板32A〜32Dは各々弾性部12により弾性支持されている。
【0083】
また、ブリッジ11の本数は4本に限らず、2本や3本などでも構わない。固定電極や振動板の分割数についても4に限らず、2や3でも5以上でも構わない。その場合、分割数が多い方が音源特定の分解能が向上する。
【0084】
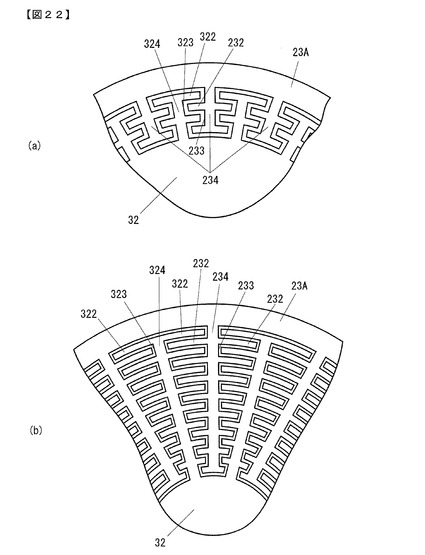
さらに、櫛歯電極232,233,322,323の延在方向は、上述した径方向に延在するものに限らず、図22に示すように櫛歯電極232,233,322,323が周方向に延在する形式のものを採用しても良い。図22は櫛歯電極形状の変形例を示す図であり、振動板32および固定電極23A〜23Dの一部、すなわち、固定電極23Aの櫛歯電極と、それに対向する振動板32側の櫛歯電極とを示したものである。図22(a)に示す例では、固定電極23Aから放射状に延びる軸部234の両側に、周方向に延びる櫛歯電極233が径方向に2列形成されている。固定電極23Aには、軸部234が複数形成されている。
【0085】
一方、振動板32の外周面には放射状に延びる軸部324が複数形成され、各軸部324の両側には、周方向に延びる櫛歯電極322が径方向に2列形成されている。櫛歯電極232は振動板32側の凹形状部分(櫛歯電極323)に入り込み、櫛歯電極322は固定電極23A側の凹形状部分(櫛歯電極233)に入り込んでいる。このような、櫛歯電極構造とすることにより静電容量変化を大きくすることができ、音波の検出の感度向上を図ることができる。
【0086】
図22(b)は他の例を示す図であり、櫛歯電極322,323の軸部324が振動板32の中央に近い部分から放射状に延びており、周方向に延在する櫛歯電極322,323は径方向に8列設けられている。固定電極23A側の櫛歯電極構造も振動板側と同様である。このように、振動板32の大部分を櫛歯電極領域としても良く、静電容量変化を増大させることで感度向上が図れる。
【0087】
以上の説明はあくまで一例であり、本発明の特徴を損なわない限り、本発明は上記実施形態の構成に何ら限定されるものではない。
【符号の説明】
【0088】
1:マイクロフォン、2:音源方向特定部、11:ブリッジ、12:弾性部、13A〜13D,23A〜23D:固定電極、31:ベース、32:振動板、32A〜32D:分割振動板、111:中心部、200:電圧検出回路、201:方向特定回路、232,233,322,323:櫛歯電極、311:開口、321:支持軸、325:溝、325a:斜面、325b:垂直面、326:底面
【技術分野】
【0001】
本発明は、指向性マイクロフォンに関する。
【背景技術】
【0002】
従来、振動板の中心の一点を軸で支持し、音圧でその軸の周囲の振動板が振動したときの振動振幅の大小の分布を検出して音源方向を特定するマイクロフォンが知られている。しかし、振動板を長時間振動させたときに、疲労により軸が変形し、音波を受けていないときでも振動板が傾いた状態になってしまうという問題があった。
【0003】
そこで、特許文献1に記載の発明では、振動板の傾きを抑える電極を設け、その電極に電圧を印加して傾きを抑えるとともに、その電圧から音源方向を特定するようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−345130号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、音源方向の特定は可能であるが、振動板の傾きが抑えられるため、マイクロフォンの指向性が阻害されてしまうという問題がある。
【課題を解決するための手段】
【0006】
請求項1の発明は、中央部に空所を有するベース基板と、第1櫛歯電極が形成されている振動板と、振動板をベース基板の空所上においてベース基板に支持する支持部と、ベース基板に保持された複数の分割電極で構成、第1櫛歯電極と空隙を有して噛合する第2櫛歯電極が分割電極の各々に形成されている固定電極と、を備える指向性マイクロフォンであって、支持部は、振動板が音源方向に応じて変位して、第2櫛歯電極に対する第1櫛歯電極の位置が変化するように振動板を弾性支持する複数の弾性部を有し、振動板、支持部および固定電極をSOI(Silicon on Insulator)基板の同一Si層により形成したことを特徴とする。
また、請求項6の発明のように、複数の分割電極と振動板との間の静電容量を、検出部により分割電極の各々に対応して個別に検出し、検出部で検出された各静電容量に基づいて演算部により音源の方向を特定するようにしても良い。
【発明の効果】
【0007】
本発明によれば、指向性および耐久性に優れた指向性マイクロフォンを得ることができる。
【図面の簡単な説明】
【0008】
【図1】本実施の形態のマイクロフォン1の正面図である。
【図2】図1のD1−D1断面図である。
【図3】音源方向による振動板32の傾き発生を説明する図である。
【図4】平行平板型マイクロフォンの基本式導出を説明する図である。
【図5】出力電圧を説明する図である。
【図6】図5の等価回路を示す図である。
【図7】音源方向特定を説明する図である。
【図8】製造工程の工程(a)〜(d)を説明する図である。
【図9】製造工程の工程(e)を説明する図である。
【図10】製造工程の工程(f)、(g)を説明する図である。
【図11】製造工程の工程(h)〜(k)を説明する図である。
【図12】製造工程の工程(l)〜(o)を説明する図である。
【図13】第2の実施の形態のマイクロフォンを示す図であり、(a)は正面図、(b)はD1−D1断面図である。
【図14】音源からの音波を受けたときの振動板32の様子を示す図である。
【図15】第3の実施の形態のマイクロフォンを示す図であり、(a)は正面図、(b)はD1−D1断面図である。
【図16】音源の方向と振動板32の変位との関係を説明する図である。
【図17】第3の実施の形態の変形例を示す図であり、(a)は第1の変形例を、(b)は第2の変形例を示す。
【図18】第3の実施の形態の変形例を示す図であり、(a)は第3の変形例を、(b)は第4の変形例を示す。
【図19】弾性部12の変形例を示す図である。
【図20】図1に示す振動板32を4つの分割振動板32A〜32Dに分割した場合の構成を示す図である。
【図21】図15に示すマイクロフォンの変形例を示す平面図である。
【図22】櫛歯電極の変形例を示す図であり、(a)は第1の変形例を、(b)は第2の変形例をそれぞれ示す。
【図23】圧力差を説明する図であり、(a)ダイアフラム230の裏面側が密封空間となっている場合を示し、(b)はダイアフラム裏面側の空間が半密封状態となっている場合を示す。
【図24】ギャップ内の圧力差の伝播を説明する図である。
【図25】ギャップ幅と変動体積との関係を示す図である。
【発明を実施するための形態】
【0009】
以下、図を参照して本発明を実施するための形態について説明する。
−第1の実施の形態−
図1,2は、本実施の形態の指向性マイクロフォンの概略構成を示す図である。図1はマイクロフォン1の正面図であり、図2は図1のD1−D1断面図である。マイクロフォン1は、図2に示すように下部Si層30,SiO2層20,上部Si層10の3層構造を有するSOI(Silicon on Insulator)基板を用いて、マイクロマシニング技術、或いはフォトリソグラフィー技術により作製される。
【0010】
下部Si層30により形成されるベース31には、円形開口311が貫通するように形成されている。ベース31の上面側には、円形開口311上に架け渡されるように4本のブリッジ11が十字状に配置されている。各ブリッジ11の一端は、ベース31上に固定されている。各ブリッジ11の他端には、それぞれ弾性部12が設けられている。各弾性部12は、ブリッジ11と振動板32に設けられた支持軸321との間を弾性的に連結している。支持軸321は円盤状の振動板32の中心(すなわち、重心)から垂直に突出するように形成されている。その結果、ブリッジ11は、振動板32を懸架するような形態でその中心部分を弾性的に支持している。
【0011】
ベース31の上面には、開口311の上面を覆うように4つの固定電極13A〜13Dが設けられている。各固定電極13A〜13Dは中心角が90度の扇形をしており、配線部131および端子部132が各々設けられている。ブリッジ11および固定電極13A〜13DはSOI基板の上部Si層10で形成されており、上部Si層10の上面には多結晶シリコン膜40およびアルミ膜50が順に形成されている。このように、本実施の形態のマイクロフォン1は、振動板32と、それと平行に対向配置された複数の固定電極13A〜13Dとを備えたコンデンサーマイクロフォンを構成している。
【0012】
ダイアフラムである振動板32は音圧を受けると振動し、固定電極13A〜13Dと振動板32との間のギャップが音波の周期に従って変化する。また、支持軸321とブリッジ11とが弾性部12によって連結されているため、音圧によって振動板32に外力が加わると弾性部12が撓むことになる。例えば、音源がマイクロフォン1の軸方向(すなわち、円形開口311の軸方向)にある場合には、各弾性部12がほぼ均等に撓んで振動板32全体がマイクロフォン1の軸方向(すなわち、円形開口311の軸方向)に平行状態で変位(振動)することになる。各固定電極13A〜13Dと振動板32との間の静電容量は、振動板32の振動や変位に応じて変化する。
【0013】
一方、図3に示すように音源がマイクロフォン1の中心軸Jに対して斜めに傾いた方向にある場合、振動板32上の位置によって音源からの音波の到達時間や音圧が違うことから、振動板32の法線が音源方向を向くように振動板32が傾く。そして、傾いた状態で音波の出力に応じて振動板32が振動する。
【0014】
ここで、平行平板における静電容量Cは、次式(1)によって表される。式(1)において、Qは電荷、Vは電圧、εは誘電率、Sは電極面積、dは電極間距離である。
【数1】
【0015】
マイクロフォン1においては、電極間距離dは固定電極13A〜13Dと振動板32との距離に対応している。厳密には、振動板32は平行に動くとは限らないので、式(1)をそのまま適用することはできず、また、振動板32の形状に応じた式に変更する必要がある。しかし、固定電極13A〜13Dと振動板32との距離が短くなると静電容量が大きくなり、逆に距離が長くなると静電容量は小さくなることは、平行平板電極の場合と同様である。従って、音源が斜めの方向にある場合には、振動板32が傾いて固定電極13A〜13Dとの距離がそれぞれ異なるため、各固定電極13A〜13Dの静電容量はそれぞれ異なる値となる。
【0016】
図3のように振動板32が傾いている場合、音源により近い固定電極13Aに関する静電容量Caは小さくなり、音源により遠い固定電極13Cに関する静電容量Ccは大きくなる傾向を有する。振動板32は、その傾いた状態を中心として音波の出力に応じて振動する。また、音源の位置によって、静電容量の変化の周期も各固定電極13A〜13Dで異なる。これは振動板32が厳密には剛体ではなく弾性を持つため、音波に対し必ずしも即座に追随せず、音波が最初に届く位置と、最後に届く位置との平面上の位置によって、変化に時間差が生じるためである。
【0017】
次に、マイクロフォン1における信号検出方法について説明する。本実施の形態のような静電容量型のマイクロフォンでは、振動板の変動による静電容量値の変化を負荷抵抗にかかる電圧の信号の形にして取り出す。このように静電変換器として機能するマイクロフォンに関して、以下では、一般的な静電変換器の基本式の導出とその出力電圧について示す。
【0018】
[1.基本式の導出]
ここでは、図4に示すように、狭い間隙を隔てて向かい合った平行平板電極を考える。これは、複数の固定電極13A〜13Dを一つの固定側電極100とすれば、外力により変位する電極101は振動板32に対応する。
【0019】
電極間に印加している直流電圧をE0、交流電圧をe、電極101に作用する外力をf、変位が発生する前の電極間隔をd0とする。また、直流電圧E0を印加したときの電極101の変位をX、微小変位をxとし、電極間に生じる静電容量をC(x)とする。このとき、図4に示すモデル系に対してラグランジュの運動方程式を用いると、ラグラジアンおよび散逸関数はそれぞれ次式(2),(3)のようになる。なお、mは電極101の質量、vは電極101の変位の速さ、kは電極101を弾性支持している部分(弾性部12に相当)のバネ定数、Q0は直流電圧E0を印加することで生じた電荷であり、qは交流電圧eにより生じた電荷であるとする。また、rfは系における機械抵抗である。
【数2】
【0020】
平行平板電極の対向面の面積をSとすると、平行平板電極間に生じる静電容量の式は次式(4)のように表される。また、機械系および電気系のラグランジュ運動方程式は順に式(5)、(6)で表される。
【数3】
【0021】
式(5)に式(2),(3)を代入し展開すると次式(7)が得られる。さらに、式(7)の右辺第3項は、式(8)のように展開される。
【数4】
【0022】
さらに、式(8)をテイラー展開すると次式(9)が得られる。
【数5】
【0023】
式(9)の第1項は静的な項なので、これを取り除き式(7)に代入してまとめると、最終的な式(10)が機械系の基本式として得られる。なお、式(10)において、A,B,C(0)は次式(11)〜(13)で表される。
【数6】
【0024】
同様に、式(6)に式(2),(3)を代入し展開すると、式(14)が得られる。
【数7】
【0025】
式(14)をテイラー展開すると式(15)が得られ、Q0=C0E0を静的項として消去すると、式(16)が得られる。よって、電気系の基本式は式(17)となる。式(17)をフェーザ表示すると、式(18)のようになる。
【数8】
【0026】
[2.出力電圧]
一般的に、実際に使用する状態においては平行平板電極間にかかる直流電圧Epは、図5に示すように何らかのインピーダンスを通じて供給される。このインピーダンスは、コンデンサーマイクロフォンなどの応用においては通常大きな値を持っている。そのため、電極101の変位により静電容量が変化した場合、直流電圧Ep も変化する。また、平行平板電極の静電容量C0と抵抗R0とによる時定数も相当に大きな値となるため、マイクロフォンとして使用する周波数範囲では電荷の移動はほとんど行われない。
【0027】
このとき電気系の基本式において、
e=−R0i …(19)
とでき、また、次式(20)が成り立つので、式(19),(20)を式(18)に代入することにより次式(21)が得られる。この等価回路は図6のように書き表すことができる。
v=jω・x …(20)
【数9】
…(21)
【0028】
このように、第1の実施の形態のマイクロフォンによれば、次のような作用効果を奏する。
【0029】
(1)本発明によるマイクロフォンによれば、静電変換を用いて、音波による振動板32の振動に応じた静電容量の変化を、電圧eとして読み取ることができる。図3に示したように、振動板32は音源の方向に応じて法線が音源方向を向くように自動的に傾く。そのため、音源の音波をより効率的に受けることができると共に、非常に指向性の高いマイクロフォンが得られる。また、マイクロフォン全体の向きを変えてやらなくとも、音源の位置に合わせて自動的に指向方向の調整を行うことができる。
【0030】
(2)本実施の形態では、振動板32の中心(重心)に近い位置を複数の弾性部12で支持するようにしているので、振動板32に音圧が作用した際に弾性部12が変形しやすい。そのため、音波に敏感に反応して振動板32が音源方向に傾き、指向性の感度が向上する。さらに、弾性部12を複数設けることで、振動板支持構造の耐久性向上を図ることができる。
【0031】
なお、弾性部12の位置は、振動板32の中心から同心円上において均等な間隔となるような位置に形成されているのが望ましい。ここでいう近傍とは、図1のように支持軸321に直接連結する位置のみに限らず、弾性部12の位置が振動板32の中心からみて振動板32の半径のほぼ半分以下の位置にあることを指す。
【0032】
一方、特許文献1に記載のマイクロフォンの場合には、振動板を中心の1点のみで法線方向に支持している。そのため、音源の方向が法線上に存在する場合には、支持部の軸方向の変形は望めなく、静電容量の変化は振動板の弾性変形のみに依存する。その結果、静電容量の変化が小さいために計測が難しい。また、振動板が傾かないような制御を行わない場合、傾くことによる繰り返し応力が一点に集中し、繰り返し疲労を起こして破損するおそれもある。
【0033】
上述した基本式および出力電圧の説明では、複数の固定電極13A〜13Dを一つの固定電極とするひとつのコンデンサとして静電容量変化を出力電圧の変化として取り出した。しかし、各固定電極13A〜13Dに対応する4つのコンデンサが並列接続されているものとして、各コンデンサの静電容量変化を出力電圧の変化として取り出すようにしても良い。その場合、上述した静電容量C0に代えて、各コンデンサの静電容量CA0,CB0,CC0,CD0を考えることになる。
【0034】
図7に示すように抵抗R0を各固定電極13A〜13Dにそれぞれ直列に設け、各抵抗の電圧eA〜eDを音源方向特定部2の電圧検出回路200によって検出する。各電圧eA〜eDは、式(21)の静電容量C0を各静電容量CA0,CB0,CC0,CD0で置き換えることにより得ることができる。各固定電極13A〜13Dの容量変化や変化の周期はこれらの電圧eA〜eDに反映されるため、方向特定回路201では、これらの電圧eA〜eDに基づいて音源の方向を特定する。例えば、各電圧eA〜eDの平均値の大きさを比較した場合、電極間距離が小さな固定電極ほど平均電圧が大きくなるので、それらの平均値の大小を比較することで音源方向を特定することができる。
【0035】
次に、図1に示したマイクロフォンの製造工程について、図8〜12を参照して説明する。まず、図8(a)に示す工程(a)では、下部Si層30,SiO2層20,上部Si層10の3層構成を成すSOIウエハ100を準備する。各層30,20,10の厚さは、例えば、順に500μm,1μm,25μmのように設定される。図8(b)の工程(b)では、上部Si層10の表面にレジスト41を塗布する。レジスト41は、例えば、スピンコーターにより3000rpm,30secの条件で塗布され、90℃,5minの条件でベークされる。
【0036】
図8(c)に示す工程(c)では、支持軸321の四隅部分に対応したパターン15を有するマスクを用いて、レジスト41に対して紫外線露光を4.0sec行い、現像を1.5min行って、パターン15部分のレジスト41を除去する。その後、ICP−RIE(inductively coupled plasma - reactive ion etching)により、パターン15部分の上部Si層10をエッチングし、SiO2層20の面を露出させる。ICP−RIEは、0.05〜1Paの比較的低い圧力下で、高密度プラズマ中のプロセスガスのイオンと試料表面との化学反応を利用して試料をエッチングするものであり、異方性の高いエッチング加工ができる。プロセスガスとしては、CCl2F2あるいはCF4等の酸化性ガスが用いられる。
【0037】
図8(d)に示す工程(d)では、硫酸過水(H2SO4+H2O2)により90℃−5min洗浄してレジスト41を除去し、強フッ酸により露出しているSiO2層20をエッチング除去する。その後、LPCVD(low pressure chemical vapor deposition)により、多結晶シリコン膜40を600nm堆積させる。 図8(d)は、LPCVD処理後の基板断面を示す図であり、図8(c)のD2−D2断面に対応する断面を示したものである。パターン15部分のSi層10およびSiO2層20にはエッチングにより溝が形成されており、その溝内の表面にも多結晶シリコン膜40が形成されている。
【0038】
LPCVDは、10〜103Paの減圧下で試料を加熱し、熱エネルギーによる気相化学反応で試料表面に膜を生成させる成膜方法である。この方法は、膜の着き回りに優れ、均一な膜厚が得られるという長所がある。多結晶シリコンの成膜では、プロセスガスとしてSiCl4+H2あるいはSiH4が用いられる。多結晶シリコン膜40を成膜するのは、支持軸321と振動板32との結合を強化するためである。さらに、結合位置にコンタクトホールを設けておき、多結晶シリコン膜を成膜すれば、アンカー効果が期待できる。
【0039】
多結晶シリコン膜40の成膜後に、OCDレジストをスピンコーターにより4000rpm,30secの条件で塗布し、150℃,30minの条件でベークした後に、1000℃,30minの条件でリン(P)の熱拡散処理を行う。多結晶シリコン膜40へのリン(P)の熱拡散により、多結晶シリコン膜40の電気抵抗は小さくなる。熱拡散処理の後に、BHF液により5min洗浄し、OCDレジストを除去する。
【0040】
図9に示す工程(e)では、厚膜レジストによるレジストパターン42を形成する。厚膜レジストは、スピンコーターにより2000rpm,25secの条件で塗布され、その後、110℃,10minの条件でベークされる。そして、紫外線露光を60sec行い、現像を2min行うことにより図9(a)に示すようなレジストパターン42が形成される。図9(b)はD3−D3断面図である。
【0041】
図10(a)に示す工程(f)では、ICP−RIEにより、上部Si層10と多結晶シリコン膜40をエッチングし、ブリッジ11の、固定電極13、固定電極13の孔14を形成する。図10(b)の工程(g)では、硫酸過水により90℃−5min洗浄して厚膜レジスト42を除去する。最表面には多結晶シリコン膜40が存在する。その後、工程(f)でエッチングした側の面を保護するために、表面側に再び厚膜レジスト42を塗布し、ベークする。
【0042】
上記の一連の工程でコンデンサーマイクロフォン1の上側の構造が一通り完成し、次に、下側の構造を作製する。図11(a)の工程(h)では、真空蒸着により下部Si層30にアルミニウム(Al)層31を厚さ0.1μm形成する。図11(b)の工程(i)では、Al層31の表面にレジストをスピンコーターにより、3000rpm,30secの条件で塗布する。そして、90℃,5minの条件でベークした後に、紫外線露光を4.0sec、現像を1.5min行って、レジストパターン43を形成する。なお、このレジストパターン43は円形開口が形成されたパターンである。
【0043】
図11(c)の工程(j)では、混酸P液(H3PO4+HNO3+CH3COOH+H2O2)に2min浸漬することにより、Al層31にパターン形成のためのエッチングを行い、さらに、RIE、すなわち酸素ガスを用いたアッシングにより、レジスト43を除去する。
【0044】
図11(d)の工程(k)では、下部Si層30のAl層31を除去した面に、厚膜レジストをスピンコーターにより2000rpm,25secの条件で塗布する。そして、110℃,5minの条件でベークした後に、紫外線露光を60sec、現像を2min行ってレジストパターン44を形成する。レジストパターン44は円形パターンであり、レジストパターン44とレジストパターン43との間にはリング状の隙間領域Rが形成されることになる。
【0045】
図12(a)に示す工程(l)では、ICP−RIEにより下部Si層30をリング状に約55μmエッチングする。このエッチング量が振動板32の厚さを決定する。図12(b)の工程(m)では、リムーバ(レジスト剥離液)により、厚膜レジスト44を除去する。このとき、基板上面側に塗布されている保護用厚膜レジスト(図11参照)も剥離されるため、再度、保護用厚膜レジストを形成する。
【0046】
図12(c)の工程(n)では、ICP−RIEによりAl層31をマスクとして下部Si層30を約445μmエッチングする。これにより、下部Si層30に形成された円形空洞内に、厚さ55μmのSiの振動板32が形成される。図12(d)に示す工程(o)では、硫酸過水により90℃−5min洗浄した後に、強フッ酸によりSiO2層20を除去する。これにより、振動板32は、固定電極13から完全に分離される。最後に、ブリッジ11および固定電極13の上面にAl金属層50を形成する。
【0047】
一般的に、ダイアフラムの振動により音声を検出するマイクロフォン(音響トランスジューサ素子)においては、振動板としてのダイアフラムの表裏間に発生する圧力差が重要となる。本実施の形態では、下部Si層30から成るベース31の円形開口311内に、同じ下部Si層で形成された振動板32が配置され、その振動板32が音圧によって振動する構造を有している。このように、振動板32の表側空間と裏側空間とが振動板32とベース31との隙間を介して連通している構造において、振動板32の表裏間に十分な圧力差を発生させるためには、隙間のギャップ寸法を最適な値に設定する必要がある。
【0048】
例えば、図23(a)に示すようにダイアフラム230の裏面側が密封空間となっていた場合と、図23(b)に示すようにダイアフラム230に穴230aが形成されていて、ダイアフラム裏面側の空間が半密封状態となっている場合とを考察する。
【0049】
空気は流体であり粘性を有するので、物質表面においては空気の速度は0に等しく、表面から離れるにつれて徐々に本来の音速にまで速度は復帰すると考えることができる。 物質表面からみて、 空気が音速未満 (音速の 99%以下)に低下している領域を速度境界層と呼ぶ。流体音場におかれた物体の表面が流体粒子の振動速度に垂直でない場合、その物体の表面に厚さδ= (2ν/ω)^0.5 の速度境界層が生じる。ここで、速度境界層とは、音速が壁の影響で遅くなっている領域である。ν は空気の動粘性係数、ω は音波の角周波数である。
【0050】
図23(b)で示すように、音響的にみて充分に大きな穴ないし隙間が空いている半開放系の場合、圧力変動は音速で表裏まで伝わる。 そして音波の一周期における音波を受けた平板の表裏間の圧力差は、音の疎密の度合いに対する平板の厚み分のみが寄与し、力としては非常に弱い。仮に音圧による空気の圧力変動Pを1Pa(94dB時)とすると、厚みが20μmの平板の表裏では、図23(a)のように密封ないしそれに近い状態の場合は、 平板に加わる圧力はそのまま最大1Pa分の準正弦波的変動を示す。しかし、図23(b)のように十分に大きな隙間が空いている半開放系の場合は、表裏の圧力差は単純に音波が厚みの分を移動するだけの差のみである。
【0051】
例えば、常温常圧において、音圧2Pa、周波数1kHzの音波であれば、音は一周期辺り1msであり、その間に圧力変動は一波長分、つまり約34cm分進む。音速の音波の圧力変動が平板の厚さ20μmを通り抜けるのに要する時間は59nsである。圧力変動が正弦波的に変動するとして、疎密変動の各周波数をω、時間をtとすると、表裏の圧力差δPは、
δP=(P0+Psinω(t+59ns))-(P0+Psinωt)
で表される。59nsという値は周期1msに対して約17000分の一であり、位相にして約0.021°であるから、この条件下ではδPはPに対して最大でも約2500分の一以下となり、半開放状態では密閉状態に対して明らかに圧力差が小さいことが分かる。そのため、一般に穴が開いていた場合、音波をうける振動体としては感度が小さすぎ、入力された音波が共振周波数であるような特別な状態のときのみ反応する。
【0052】
一方、平板上の穴の半径またはギャップの間隔の1/2が速度境界層以下であるなら、その隙間を通る音波は本来よりも遅く伝播されると言える。図24はギャップ内の圧力差の伝播を説明する図であり、固定部241はベース31に対応し、可動部242は振動板32に対応している。この隙間(ギャップ)d10が充分に狭く、また平板の厚みhがギャップに対して充分に厚い場合には、ギャップ内の圧力差の伝播は、広い自由空間に対して遅延が生じるため、圧力変動は音速では伝わらない。
【0053】
そのため、音波を受けた場合の平板の表裏での圧力差は、厚み分の差でなく、音波自体の音圧と平衡状態との差であるとみなすことができる。少なくとも、ギャップを空気が通り抜ける際に生じる粘性抵抗は、充分に大きな穴ないし隙間がある場合よりも大きいため、音波による力は可動電極に伝わりやすくなる。また、スクイーズフィルムダンピング効果によって、可動電極は平面に平行な方向には動きにくくなり、垂直な方向に動く。そして、この隙間が3μm以下であり、かつ厚みがその5倍以上である場合に、20Hz〜20kHzのいわゆる可聴帯域において、図23(b)に示すような穴あき平板が、隙間無く空気を遮断した密封型ダイアフラムと同様に音圧をうけて振動することを確認した。
【0054】
例えば、20kHzにおいて音響境界層厚みは約15.7μmであり、隙間の幅が3μmであるならば、隙間を通る音波の伝播速度は25℃時に最大でも3.18m/sとなり、本来の音速に対して1/100以下にまで低下する。隙間の幅が1μmであれば、音波の伝播速度は0.35m/sにまで低下し、およそ1/1000程度となる。この速度になると、圧力変動の到達位置は1周期あたり20kHzにおいて約17μmであり、電極の厚みが17μm以上ある場合は裏面に到達さえしないことになる。これらの結果、実用上無視できないオーダーの音響抵抗が生じる。
【0055】
さらに、ギャップの幅によって音速が変化し、図25に示すように、音波の圧力変動に影響される体積も、ギャップの幅によって変化することが分かった。一周期あたりの圧力変動の影響範囲が、元のギャップの体積よりも充分に大きい場合、音波はそのギャップを貫通するとみなすことができる。ギャップ幅d10が4μm 以上になると、音波による圧力変動は2 倍を超えるため、音波の遮断効果が低下する。そのため、本発明では充分な効果を得られるギャップ幅を3μm 以下とする。また、ギャップが狭すぎると、今度は壁面への接触の可能性が生じる。一般的なICP−RIE 加工を用いる場合、壁面の粗さは200nm 以下程度となるため、可能であれば0.5μm 以上のギャップがあることが望ましい。
【0056】
すなわち、平板を可動部と固定部に分割し、可動部と固定部のギャップを0.5μm 以上かつ3μm以下とし、可動部と固定部のギャップを構成する縁部分の厚みをギャップの5倍以上とすることが、感度向上のためには望ましい。そのような構造とすることで、音圧を十分に読み取りうるセンサを構成することが可能となる。
【0057】
−第2の実施の形態−
図13は、本発明に係る指向性マイクロフォン1の第2の実施の形態を示す図である。図1に示したマイクロフォン1は、固定電極13A〜13Dと振動板32とが平行に対向配置された平行平板型のコンデンサーマイクロフォンを構成していた。一方、図13に示すマイクロフォン1は、櫛歯電極型のコンデンサーマイクロフォンを構成している。なお、図1の場合と同様の構成要素には同様の符号を付した。
【0058】
図13において、(a)はマイクロフォン1の平面図であり、(b)はD1−D1断面図である。本実施の形態では、振動板は略扇形状の4つの分割振動板32A〜32Dにより構成され、それぞれSOI基板の上部Si層10により形成され、一方、ブリッジ11は十字形状を成し、十字の各先端部分はベース31上に固定されている。ブリッジ11には端子部11dが設けられている。ブリッジ11の中心部111の側面には、4本の弾性部12が放射状に設けられており、これらの弾性部12によって各分割振動板32A〜32Dがそれぞれ支持されている。各分割振動板32A〜32Dの円弧状部分には複数の凹凸からなる櫛歯電極322,323が形成されている。
【0059】
一方、ベース31上には、櫛歯電極322,323と対向するように固定電極23A〜23Cが形成されている。図1に示すマイクロフォン1の場合と同様に、固定電極23A〜23Dは上部Si層10により形成されている。各固定電極23A〜23Dにも櫛歯電極232,233が形成されている。固定電極23A〜23Dは、それらの櫛歯電極232,233と振動板32の櫛歯電極322,323とが隙間を介して噛合するように、それぞれ配置されている。各固定電極23A〜23Dには配線部131を介して端子部132が設けられている。
【0060】
なお、櫛歯電極232,233と櫛歯電極322,323とのギャップ寸法についても、第1の実施の形態で説明したギャップの場合と同様のことが言える。すなわち、櫛歯電極232,233と櫛歯電極322,323とのギャップ寸法を0.5μm 以上かつ3μm以下とする。また、櫛歯電極部分の厚みも、ギャップの5倍以上とする。
【0061】
図14は、音源からの音波を受けたときの振動板の様子を模式的に示す図である。図3に示す場合と同様に、音源はマイクロフォン1の中心軸Jに対して斜めに傾いた方向にある。各分割振動板32A〜32Dが音波による音圧を受けると、受けた音圧の大きさに応じて各弾性部12が撓み、分割振動板32A〜32Dはブリッジ11の中心部111を支点として変位して振動する。その結果、対向している一対の櫛歯電極が上側にずれて噛み合いの面積が変化し、静電容量が変化する。これは、上述した式(1)においては、電極面積Sの変化に相当する。櫛歯電極の場合、電極対向面が凹凸形状となっているため、電極面積を大きくすることができ、感度の向上が図れる。
【0062】
図14に示す場合には、分割振動板32Cよりも分割振動板32Aの方が音源に近いので、作用する音圧がより大きく、静電容量の変化もより大きくなっている。このように、音源の方向に応じて各分割振動板32A〜32Dに関する静電容量が変化するので、各分割振動板32A〜32Dに関する静電容量の変化の大きさを比較することで、音源の方向を特定することができる。さらに、振動板を複数の分割振動板32A〜32Dに分割して独立に音波を受信するようにしているので、図1のように一つの振動板32の場合に比べてより正確に音源特定を行うことができる。また、マイクロフォン全体の向きを変えてやらなくとも、音源の位置に合わせて自動的に指向方向の調整を行うことができる。
【0063】
なお、音声信号検出の方法に関しては第1の実施の形態と同様であり、ここでは説明を省略する。本実施の形態では、振動板を4つに分割しているが、分割数は4に限らず複数であれば良い。固定電極の数は分割振動板の数と同数とするが、固定電極の数だけ信号を出力することができるので、分割振動板の数よりも大きくても良い。分割振動板の数を多くして固定電極の数を多くした方が、音源方向特定をより細かく行うことができる。
【0064】
振動板と固定電極とをギャップを介して平行に配置した平行平板型のマイクロフォンの場合には、静電容量の確保のために振動板の面積を大きくすると共に、できるだけ固定電極と振動板(ダイアフラム)とのギャップを小さくし、かつ、感度確保のために、振動板を薄膜のダイアフラムにする必要がある。しかし、ギャップ形成時にスティッキングを起こしてしまい歩留まりの悪化を招くほか、犠牲層エッチングや洗浄技術などを要し、また、大量のマスクを必要とする。
【0065】
一方、第2の実施の形態では、平行平板型のダイアフラム構造の代わりに、静電容量部を櫛歯型電極構造とすることにより、薄膜の狭ギャップ構造を形成することなく、静電容量を確保することが可能になる。また、分割振動板32A〜32D、ブリッジ11、弾性部12および固定電極23A〜23Dは、同一の上部Si層10により同時に形成される。そのため、第1の実施の形態のマイクロフォンに比べて加工工程が簡略化される。これらの構成要素は図8(c)に示す工程(c)のエッチング加工により同時に形成され、その後、裏面側から下部Si層30をエッチング加工して円形開口31を形成する。
【0066】
また、傾き変位に対する静電容量の変化が平行平板型に比べて大きいので、傾き検出感度が向上する。櫛歯型電極センサにおいてはギャップの変更は容易であり、薄膜に比べスティッキングなどの歩留まり不良の発生確率も低く、近年のDeep-RIE技術の発展により簡易に狭ギャップを形成できるため、静電容量変化の高いセンサを作成可能である。
【0067】
−第3の実施の形態−
上述した第1および第2の実施の形態では、音源が斜め方向にある場合には、振動板はベース31の面に対して傾くように変位した。一方、本実施の形態では、振動板がベース31の面に平行に変位するような構成としている。
【0068】
図15はマイクロフォンの第3の実施の形態を示す図であり、マイクロフォン1は、第2の実施の形態と同様に櫛歯電極型のコンデンサマクロフォンを構成している。ただし、振動板は、分割振動板ではなく円形状の1つの振動板32で構成されている。振動板32の櫛歯電極322,323に対向するように、櫛歯電極232,233を有する4つの固定電極23A〜23Dがベース31上に設けられている。振動板32は、4つの弾性部12によって開口311上に弾性的に支持されている。弾性部12は、振動板32がベース31に平行に変位しやすいように、長円形状の梁構造をしている。
【0069】
振動板32の音波入射面すなわち開口311と反対側の面には、フレネルレンズのような溝325が形成されている。円形の溝325の断面形状は鋸刃状になっており、複数の溝325が振動板32の中央を中心として同心円状に複数形成されている。なお、図15では、溝325の中心側の面325aが斜めに傾斜した面で、外側の面325bは垂直な面となっているが、反対に、中心側の面325aが垂直面で、外側の面325bが斜面であっても構わない。
【0070】
振動板32の図示左側領域の斜面325aに対して垂直に音波が入射して音圧が作用すると、振動板32に対して左向きの力Fが作用することになる。逆に、右側領域の斜面325aに音波が入射して音圧が作用すると、振動板32には右向きの力が作用することになる。そのため、図16(a)に示すように振動板32の中心軸Jに対して右斜め上方の音源から、振動板32に音波が入射すると、振動板32は全体として左方向の力を受けて左側に変位することになる。逆に、図16(b)に示すように光源が中心軸よりも左側にある場合、振動板32は全体として右方向の力を受けて右側に変位することになる。
【0071】
その結果、音源方向と反対方向の櫛歯電極部分の隙間が狭くなり、その領域の静電容量が大きくなる。例えば、図15(a)において、振動板32が左方向に変位すると、固定電極23C,23Dに関係する静電容量が大きくなり、逆に固定電極23A,23Bに関する静電容量が小さくなる。そのため、固定電極23C,23Dの静電容量変化は、音源方向からの音波に大きく依存することになり、マイクロフォンは音源方向の指向性を有することになる。ただし、音圧による力成分は水平方向だけでなく垂直方向もあるため、垂直方向成分の分布状況に応じて振動板32は傾く。そのため、静電容量変化は上述したものから若干異なる。また、図15では振動板32の音波入射面に斜面325を形成したが、入射面が平面であってもよい。すなわち、平面であっても音圧の分布によって振動板32が傾き、結果的に横方向(水平方向)の力が作用するようになり、振動板32が横方向に移動することになる。いずれにしても、自動的に音源方向に指向性が調整されることになる。さらに、櫛歯電極の場合、第2の実施の形態のように櫛歯が上下方向にずれるのではなく本実施の形態のように対向方向に変位した場合のほうが静電容量の変化が大きくなる。そのため、検出感度の向上を図ることができる。
【0072】
また、固定電極23A〜23Dの間の静電容量の差違を比較することにより、音源方向を特定することができる。さらに、上述した場合と同様に、櫛歯電極の対向方向に振動板が変位した場合には静電容量の変化が大きくなるため、音源方向特定の方向分解能をより高めることができる。
【0073】
図15に示す例では、振動板32の周辺部分の4箇所を弾性部12で弾性支持したが、図21に示すように、振動板32の中央に近い部分を弾性部12で支持するようにしても良い。図21ではブリッジ11の先端部分に弾性部12を設け、それらの弾性部12により振動板32を支持するようにした。その他の構造は、図15に示したものと同様である。このように中央に近い部分を支持することで、音圧によって振動板32が平行移動するだけでなく、振動板32が斜めに傾き易くなる。弾性部12の構造は図15と同様の構造でも良いし、後述する図19の(a)〜(d)に示すような構造を採用しても良い。
【0074】
溝325の平面形状は図15に示すような同心円形状に限らず、様々な形態が可能である。例えば、図17(a)に示す変形例1のように方形に配置しても良い。また、斜面325aの法線方向を特定方向に向けて、特定の方向からの音波に対して感度を高めることも可能である。なお、鋸刃状の溝は、グレーマスク技術によってエッチング速度に差をつけることで形成することができる。また、特定の方向に向いた斜面のみを形成する場合には、ウェットエッチングでも形成可能である。
【0075】
図17(b)は変形例2を示す図であり、振動板32を4つの分割振動板32A〜32Dに分割し、それらを個別に弾性部12で支持するようにした。十字形状のブリッジ11からは、各分割振動板32A〜32Dに対して2本の弾性部12がそれぞれ接続されている。一対の弾性部12は各分割振動板32A〜32Dが径方向に変位しやすいように構成されている。
【0076】
図18(a)に示す変形例3では、図15に示したマイクロフォンとは逆にベース31側から音波が入射する構成になっている。すなわち、振動板32の底面326側に音波が入射する。その他の構成については、上述した第3の実施の形態と同様である。底面326は、音源方向に対する指向性を高めるために斜面で構成されている。底面326は、中央部が凸形状となるような凸面になっている。そのため、例えば、下方から上方への空気の流れがあっても空気抵抗が低減されるような底面形状となっており、空気の流れの影響を低減することができる。
【0077】
なお、図18(a)に示す変形例3では、中央部から周辺部にかけて斜面の傾きが徐々に大きくなっているが、円錐面のような底面326でも良い。
【0078】
図18(b)に示す変形例4では、底面326は凹面を成している。そのため、集音効果の向上を図ることができる。
【0079】
弾性部12の形態としては、図1に示したような梁構造のものや、図15に示したような長円形状の梁構造の他に、図19に示すような梁構造が考えられる。図19(a)に示す弾性部12は、2本の直線状の梁121で構成されている。この弾性部12は、図のy方向に撓みやすい構造である。図19(b)に示す弾性部12では、梁の厚さ(z方向寸法)を薄くしてバネ定数を小さくしている。この構成の場合上下方向(z方向)に撓みやすいので、上下に傾くような構成の振動板32の支持に適している。
【0080】
図19(c)に示す弾性部12は、図1に示す弾性部12を構成する梁と、図19(b)に示す梁とを直列に接続した構成を有している。そのため、z方向およびy方向の両方に撓みやすい構造となっている。図19(d)に示す弾性部12は、y方向に折り返された蛇腹構造の梁構造を有している。そのため、y方向に撓みやすいとともに、x方向にも変位しやすいという利点を有している。なお、蛇腹の折り返し方向をz方向とすれば、z方向に撓み易いと共にx方向に変形し易い。
【0081】
以上説明した実施の形態は、次のような作用効果を奏する。
(1)中央部に開口311を有するベース31と、ベース31の開口311上に架け渡されているブリッジ11と、ブリッジ11の中央部で支持軸321を介して弾性支持されている振動板32と、開口311に振動板32と空隙を設けて対向配置され、ベース31に保持されている固定電極13A〜13Dを複数備え、ブリッジ111の中央部に設けられ、音波の入射によって振動板32の入射面が音源方向に応じて傾くように、振動板32の支持軸321を側方から弾性支持する複数の弾性部材32とを備える。その結果、音源方向の音波に関する集音特性が向上し、指向性の高いマイクロフォンが得られる。また、マイクロフォン全体の向きを変えてやらなくとも、音源の位置に合わせて自動的に指向方向の調整を行うことができる。さらに、複数の弾性部12によって振動板32を支持しているので、従来のような一点支持構造に比べて支持部分の耐久性向上を図ることができる。
(2)指向性マイクロフォンは、中央部に開口311を有するベース31と、ベース31の開口311上に架け渡されているブリッジ11と、複数に分割された分割振動板32A〜32Dのそれぞれがブリッジ11の中央部で弾性支持されている振動板32と、開口311に分割振動板32A〜32Dと空隙を設けて対向配置され、ベース31に保持されている電極13A〜13Dを複数備えて構成される固定電極と、音波の入射によって複数の分割振動板32A〜32Dのそれぞれの入射面が音源方向に応じて傾くように、ブリッジ11の中央部に設けられた中心部111の側周に分割振動板32A〜32Dを各々弾性支持する複数の弾性部12とを備える。複数の分割振動板32A〜32Dが各々傾くことにより、より指向性が向上する。
(3)振動板32には櫛歯電極322,323が形成されていて、その振動板32は、入射する音波の方向に応じて変位するように、ベース31の開口311上において複数の弾性部12により弾性支持されている。また、固定電極はベース31に保持された複数の分割電極23A〜23Dで構成され、櫛歯電極322,323と空隙を有して噛合する櫛歯電極232,233が分割電極23A〜23Dの各々に形成されている。櫛歯電極とすることで静電容量の変化を大きくすることができ、検出感度の向上を図ることができる。さらに、振動板32、弾性部12および固定電極をSOI(Silicon on Insulator)基板の同一Si層により形成したことにより、エッチング加工が簡略化されると共に、マイクロフォンの小型化を図ることができる。
(4)なお、図13に示すように、振動板32を複数に分割し、それらが音圧により傾くように構成しても良いし、図15や図17(b)に示すように振動板32、32a〜32dが面方向(すなわち、面と平行な方向)に変位するように構成しても良い。図17(b)の構成の場合、振動板が複数の分割振動板32a〜32dに分割することで、指向性のさらなる向上を図ることができる。
(5)振動板32をその面方向に移動可能に弾性支持し、振動板32の音波入射面に斜面325を形成することで、音圧の作用により振動板を櫛歯電極の対向面方向に変位させるようにしても良い。その結果、振動板の変位に対する静電容量変化を大きくすることができ、マイクロフォンの指向性および音源方向特定性能を向上させることができる。
(6)複数の固定電極23A〜23Dと振動板32との間の静電容量を、固定電極23A〜23Dの各々に対応して電圧検出回路200により電圧として個別に検出し、その電圧に基づいて歩行特定回路201において音源の方向を特定する。このように構成することで、一つのマイクロフォンで音源の特定を行うことができる。
【0082】
上述した実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例をどのように組み合わせることも可能である。例えば、図1の振動板32を、図20に示すように、固定電極13A〜13Dに対向する4つに分割振動板32A〜32Dに分割しても良い。図20では、振動板32の形状が分かりやすいように、固定電極13A〜13Dを省略してマイクロフォンの構成を示したものである。ブリッジ11の中心部111は分割振動板32A〜32Dの支持軸を構成し、その側周に弾性部12がそれぞれ放射状に設けられている。分割振動板32A〜32Dは各々弾性部12により弾性支持されている。
【0083】
また、ブリッジ11の本数は4本に限らず、2本や3本などでも構わない。固定電極や振動板の分割数についても4に限らず、2や3でも5以上でも構わない。その場合、分割数が多い方が音源特定の分解能が向上する。
【0084】
さらに、櫛歯電極232,233,322,323の延在方向は、上述した径方向に延在するものに限らず、図22に示すように櫛歯電極232,233,322,323が周方向に延在する形式のものを採用しても良い。図22は櫛歯電極形状の変形例を示す図であり、振動板32および固定電極23A〜23Dの一部、すなわち、固定電極23Aの櫛歯電極と、それに対向する振動板32側の櫛歯電極とを示したものである。図22(a)に示す例では、固定電極23Aから放射状に延びる軸部234の両側に、周方向に延びる櫛歯電極233が径方向に2列形成されている。固定電極23Aには、軸部234が複数形成されている。
【0085】
一方、振動板32の外周面には放射状に延びる軸部324が複数形成され、各軸部324の両側には、周方向に延びる櫛歯電極322が径方向に2列形成されている。櫛歯電極232は振動板32側の凹形状部分(櫛歯電極323)に入り込み、櫛歯電極322は固定電極23A側の凹形状部分(櫛歯電極233)に入り込んでいる。このような、櫛歯電極構造とすることにより静電容量変化を大きくすることができ、音波の検出の感度向上を図ることができる。
【0086】
図22(b)は他の例を示す図であり、櫛歯電極322,323の軸部324が振動板32の中央に近い部分から放射状に延びており、周方向に延在する櫛歯電極322,323は径方向に8列設けられている。固定電極23A側の櫛歯電極構造も振動板側と同様である。このように、振動板32の大部分を櫛歯電極領域としても良く、静電容量変化を増大させることで感度向上が図れる。
【0087】
以上の説明はあくまで一例であり、本発明の特徴を損なわない限り、本発明は上記実施形態の構成に何ら限定されるものではない。
【符号の説明】
【0088】
1:マイクロフォン、2:音源方向特定部、11:ブリッジ、12:弾性部、13A〜13D,23A〜23D:固定電極、31:ベース、32:振動板、32A〜32D:分割振動板、111:中心部、200:電圧検出回路、201:方向特定回路、232,233,322,323:櫛歯電極、311:開口、321:支持軸、325:溝、325a:斜面、325b:垂直面、326:底面
【特許請求の範囲】
【請求項1】
中央部に空所を有するベース基板と、
第1櫛歯電極が形成されている振動板と、
前記振動板を前記ベース基板の空所上において前記ベース基板に支持する支持部と、
前記ベース基板に保持された複数の分割電極で構成され、前記第1櫛歯電極と空隙を有して噛合する第2櫛歯電極が前記分割電極の各々に形成されている固定電極と、を備える指向性マイクロフォンであって、
前記支持部は、前記振動板が音源方向に応じて変位して、前記第2櫛歯電極に対する前記第1櫛歯電極の位置が変化するように前記振動板を弾性支持する複数の弾性部を有し、
前記振動板、前記支持部および前記固定電極をSOI(Silicon on Insulator)基板の同一Si層により形成したことを特徴とする指向性マイクロフォン。
【請求項2】
請求項1に記載の指向性マイクロフォンにおいて、
前記支持部は、音波の入射によって前記振動板の面と平行な方向に移動可能なように、前記複数の弾性部を介して前記振動板を弾性支持することを特徴とする指向性マイクロフォン。
【請求項3】
請求項2に記載の指向性マイクロフォンにおいて、
前記振動板の音波入射面に斜面を形成したことを特徴とする指向性マイクロフォン。
【請求項4】
請求項2または3に記載の指向性マイクロフォンにおいて、
前記振動板を前記分割電極に対応して複数の分割板で構成し、
前記支持部は、前記複数の分割板の各々を個別に弾性支持することを特徴とする指向性マイクロフォン。
【請求項5】
請求項1に記載の指向性マイクロフォンにおいて、
前記振動板は複数の分割板に分割され、
前記支持部は、前記ベース基板の空所上に架け渡されている梁構造と、音波の入射によって前記複数の分割板が音源方向に応じて個別に傾くように、前記複数の分割板のそれぞれを前記梁構造の中央部で個別に弾性支持する複数の弾性部とを備えることを特徴とする指向性マイクロフォン。
【請求項6】
請求項1〜5のいずれか一項に記載の指向性マイクロフォンにおいて、
前記複数の分割電極と前記振動板との間の静電容量を、前記分割電極の各々に対応して個別に検出する検出部と、
前記検出部で検出された各静電容量に基づいて音源方向を特定する演算部とを備えたことを特徴とする指向性マイクロフォン。
【請求項1】
中央部に空所を有するベース基板と、
第1櫛歯電極が形成されている振動板と、
前記振動板を前記ベース基板の空所上において前記ベース基板に支持する支持部と、
前記ベース基板に保持された複数の分割電極で構成され、前記第1櫛歯電極と空隙を有して噛合する第2櫛歯電極が前記分割電極の各々に形成されている固定電極と、を備える指向性マイクロフォンであって、
前記支持部は、前記振動板が音源方向に応じて変位して、前記第2櫛歯電極に対する前記第1櫛歯電極の位置が変化するように前記振動板を弾性支持する複数の弾性部を有し、
前記振動板、前記支持部および前記固定電極をSOI(Silicon on Insulator)基板の同一Si層により形成したことを特徴とする指向性マイクロフォン。
【請求項2】
請求項1に記載の指向性マイクロフォンにおいて、
前記支持部は、音波の入射によって前記振動板の面と平行な方向に移動可能なように、前記複数の弾性部を介して前記振動板を弾性支持することを特徴とする指向性マイクロフォン。
【請求項3】
請求項2に記載の指向性マイクロフォンにおいて、
前記振動板の音波入射面に斜面を形成したことを特徴とする指向性マイクロフォン。
【請求項4】
請求項2または3に記載の指向性マイクロフォンにおいて、
前記振動板を前記分割電極に対応して複数の分割板で構成し、
前記支持部は、前記複数の分割板の各々を個別に弾性支持することを特徴とする指向性マイクロフォン。
【請求項5】
請求項1に記載の指向性マイクロフォンにおいて、
前記振動板は複数の分割板に分割され、
前記支持部は、前記ベース基板の空所上に架け渡されている梁構造と、音波の入射によって前記複数の分割板が音源方向に応じて個別に傾くように、前記複数の分割板のそれぞれを前記梁構造の中央部で個別に弾性支持する複数の弾性部とを備えることを特徴とする指向性マイクロフォン。
【請求項6】
請求項1〜5のいずれか一項に記載の指向性マイクロフォンにおいて、
前記複数の分割電極と前記振動板との間の静電容量を、前記分割電極の各々に対応して個別に検出する検出部と、
前記検出部で検出された各静電容量に基づいて音源方向を特定する演算部とを備えたことを特徴とする指向性マイクロフォン。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2012−138946(P2012−138946A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2012−54313(P2012−54313)
【出願日】平成24年3月12日(2012.3.12)
【分割の表示】特願2009−174031(P2009−174031)の分割
【原出願日】平成21年7月27日(2009.7.27)
【出願人】(390022471)アオイ電子株式会社 (85)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成24年3月12日(2012.3.12)
【分割の表示】特願2009−174031(P2009−174031)の分割
【原出願日】平成21年7月27日(2009.7.27)
【出願人】(390022471)アオイ電子株式会社 (85)
【Fターム(参考)】
[ Back to top ]