
指示値計測システム
【課題】指示針が示す指示値を精度高く計測すること。
【解決手段】指示値計測システム1は、メーターの画像を撮像する撮像装置2と、撮像装置2によって撮像されたメーターの画像から指示針が示す指示値を計測する画像解析処理装置3と、を備える。画像解析処理装置3は、指示針の中心位置及び動作開始位置の情報に基づいて撮像装置2によって撮像されたメーターの画像から指示針の画像を抽出し、抽出された指示針の画像に基づいて指示針の回転角度を検出し、指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて指示針の回転角度を指示値に変換出力する。
【解決手段】指示値計測システム1は、メーターの画像を撮像する撮像装置2と、撮像装置2によって撮像されたメーターの画像から指示針が示す指示値を計測する画像解析処理装置3と、を備える。画像解析処理装置3は、指示針の中心位置及び動作開始位置の情報に基づいて撮像装置2によって撮像されたメーターの画像から指示針の画像を抽出し、抽出された指示針の画像に基づいて指示針の回転角度を検出し、指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて指示針の回転角度を指示値に変換出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、メーターの中心点を回転軸として回転する指示針が示す指示値を計測する指示値計測システムに関するものである。
【背景技術】
【0002】
水処理設備の運転制御作業では、作業員が、制御機器の状態を計測する電力計等のメーターの指示針が示す指示値を読み取り、読み取った指示値に基づいて機器を調整することが行われている。ところが、このような運転管理作業では、作業員の作業負荷が大きく、また作業員が指示値を誤認識する可能性がある。このような背景から、近年、画像処理技術を利用してメーターの指示値を計測する技術が提案されている(特許文献1参照)。具体的には、特許文献1記載の技術は、メーターの画像を撮像し、撮像された画像から指示針を含む画像を抽出し、抽出された画像に基づいて指示針の指示値を読み取るものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−258992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、画像処理技術を利用した従来の計測技術によれば、メーターの種別や指示針の動作範囲に関する情報が設定されていないために、指示針の画像を正確に抽出できないことがあった。このため、メーターの画像から指示針の画像を正確に抽出し、指示針が示す指示値を精度高く計測可能な技術の提供が期待されていた。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、指示針が示す指示値を精度高く計測可能な指示値計測システムを提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決し、目的を達成するために、本発明に係る指示値計測システムは、メーターの中心点を回転軸として回転する指示針が示す指示値を計測する指示値計測システムであって、前記メーターの画像を撮像する撮像装置と、前記撮像装置によって撮像されたメーターの画像から前記指示針が示す指示値を計測する画像解析処理装置と、を備え、前記画像解析処理装置は、少なくとも前記指示針の中心位置及び動作開始位置と前記指示針が示す指示値のベーススケール及びフルスケールとを設定する設定手段と、前記設定手段によって設定された前記指示針の中心位置及び動作開始位置の情報に基づいて、前記撮像装置によって撮像されたメーターの画像から指示針の画像を抽出する指示針画像抽出手段と、前記指示針画像抽出手段によって抽出された指示針の画像に基づいて、指示針の回転角度を検出する回転角度検出手段と、前記設定手段によって設定された前記指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて、前記回転角度検出手段によって検出された前記指示針の回転角度を指示値に変換出力する出力手段と、を備える。
【発明の効果】
【0007】
本発明に係る指示値計測システムによれば、指示針が示す指示値を精度高く計測することができる。
【図面の簡単な説明】
【0008】
【図1】図1は、本発明の一実施形態である指示値計測システムの構成を示すブロック図である。
【図2】図2は、本発明の一実施形態である画像解析処理の流れを示すフローチャートである。
【図3】図3は、指示針設定画面の一例を示す図である。
【図4】図4は、メーターの構成を示す模式図である。
【図5】図5は、輝度分布のヒストグラムの一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本発明の一実施形態である指示値計測システムの構成及び動作について説明する。
【0010】
〔指示値計測システムの構成〕
始めに、図1を参照して、本発明の一実施形態である指示値計測システムの構成について説明する。
【0011】
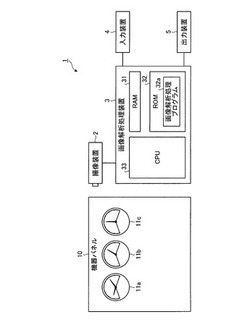
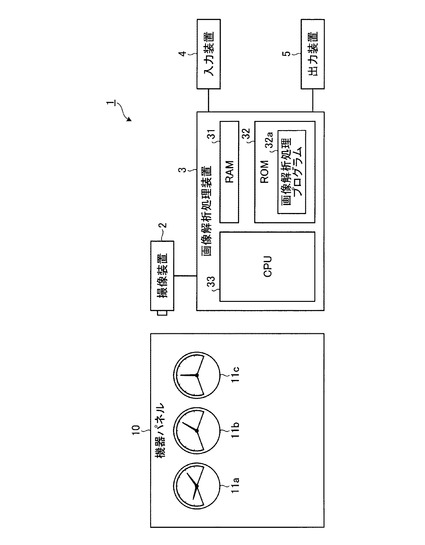
図1は、本発明の一実施形態である指示値計測システムの構成を示すブロック図である。図1に示すように、本発明の一実施形態である指示値計測システム1は、撮像装置2,画像解析処理装置3,入力装置4,及び出力装置5を備える。撮像装置2は、機器パネル10に設けられた複数のメーター11a,11b,11cのRGB画像を撮像し、LAN(Local Area Network)等の電気通信回線を介してRGB画像のデータを画像解析処理装置3に入力するものである。画像解析処理装置3は、パーソナルコンピュータ等の汎用の情報処理装置によって構成され、RAM31,ROM32,及びCPU33を備える。
【0012】
RAM31は、CPU33が実行する処理に関するコンピュータプログラムや制御データを一時記憶し、CPU33のワーキングエリアとして機能する。ROM32は、CPU33が実行する処理に関するコンピュータプログラムや制御データを記憶する。本実施形態では、ROM32は、後述する画像解析処理の各処理ステップをコンピュータ言語によって記述した画像解析処理プログラム32aを記憶する。CPU33は、ROM32内に記憶されているコンピュータプログラムを実行することによって画像解析処理装置3全体の動作を制御する。本実施形態では、CPU33は、画像解析処理プログラム32aを実行することによって、本発明に係る設定手段,指示針画像抽出手段,回転角度検出手段,及び指示値変換手段として機能する。
【0013】
入力装置4は、キーボード,マウスポインタ,テンキー等の入力装置によって構成され、オペレータの操作入力情報を画像解析処理装置3に入力する。出力装置5は、表示装置や印刷装置等の出力装置によって構成され、画像解析処理装置3の各種処理情報を出力する。
【0014】
〔画像解析処理〕
このような構成を有する指示値計測システム1では、画像解析処理装置3が以下に示す画像解析処理を実行することによって、メーターの画像から黒色の指示針の画像を抽出し、黒色の指示針が示す指示値(工業値)を計測する。以下、図2に示すフローチャートを参照して、この画像解析処理を実行する際の画像解析処理装置3の動作について説明する。
【0015】
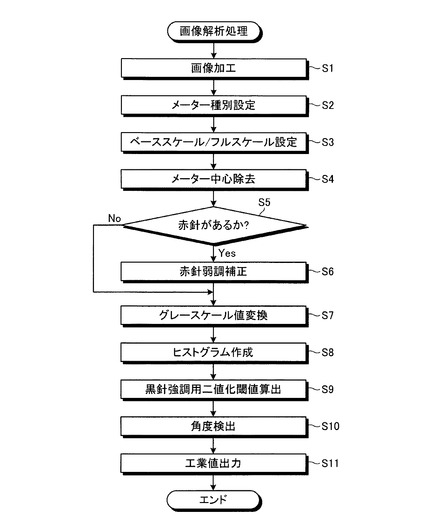
図2は、本発明の一実施形態である画像解析処理の流れを示すフローチャートである。図2に示すフローチャートは、オペレータが入力装置4を操作することによって、画像解析処理の実行を指示したタイミングで開始となり、画像解析処理はステップS1の処理に進む。
【0016】
ステップS1の処理では、CPU33が、撮像装置2によって撮像されたメーター11a〜11cのRGB画像に対し輝度調整やコントラスト調整等の画像加工調整を行うことによって、メーター11a〜11cの画像が鮮明になるようにRGB画像を加工する。なお、撮像段階でメーター11a〜11cの画像が鮮明である場合には、このステップS1の処理は省略してもよい。これにより、ステップS1の処理は完了し、画像解析処理はステップS2の処理に進む。
【0017】
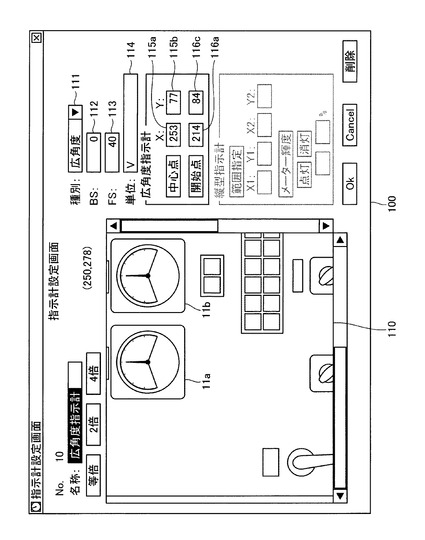
ステップS2の処理では、CPU33が、画像解析処理の対象となるメーターの種別を設定する。具体的には、CPU33は、図3に示すような指示針設定画面100を出力装置5に表示する。指示針設定画面100は、撮像装置2によって撮像されたRGB画像を表示する画像表示部110、メーターの種別を設定する種別設定部111、メーターのベーススケール(BS)を設定するベーススケール設定部112、メーターのフルスケール(FS)を設定するフルスケール設定部113、メーターが示す指示値の単位を設定する単位設定部114、メーターの中心点の位置座標を設定する中心点座標設定部115a,115b、指示針の動作開始点の位置座標を設定する開始点設定部116a,116bを含む。
【0018】
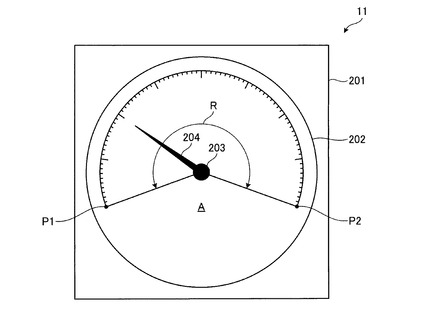
オペレータは、出力装置5に指示針設定画面100が表示されると、種別設定部111をプルダウン操作することによってメーターの種別のリストを表示させ、表示されたリストの中から処理対象となるメーターの種別を選択する。図3に示す例は、メーターの種別として広角度指示計が選択された例を示す。また、オペレータは、画像表示部110に表示されているRGB画像上におけるメーターの中心点及び動作開始点をクリック操作することにより、図4に示すメーター11の中心点203及び指示針204の動作開始点P1(動作範囲Rの最小値P1)の位置座標を設定する。これにより、ステップS2の処理は完了し、画像解析処理はステップS3の処理に進む。
【0019】
ステップS3の処理では、CPU33が、画像解析処理の対象となるメーターのベーススケール及びフルスケールを設定する。具体的には、オペレータは、図3に示す指示針設定画面100中のベーススケール設定部112及びフルスケール設定部113にベーススケール及びフルスケールの値を入力することによって、画像解析処理の対象となるメーターのベーススケール及びフルスケールを設定する。なお、ベーススケール及びフルスケールとは、図4に示すように、指示針204が動作範囲Rの最小値P1及び最大値P2にある時に示す指示値のことを意味する。これにより、ステップS3の処理は完了し、画像解析処理はステップS4の処理に進める。
【0020】
ステップS4の処理では、CPU33が、撮像装置2によって撮像されたRGB画像の中からステップS2の処理によって中心点の位置座標が設定されたメーターのRGB画像を抽出する。そして、CPU33は、指示針の回転軸の画像を除去するために、ステップS2の処理により設定されたメーターの中心点の位置座標に基づいてメーターの中心点から所定範囲内にある画像を抽出したRGB画像から除去する。これにより、ステップS4の処理は完了し、画像解析処理はステップS5の処理に進む。
【0021】
ステップS5の処理では、CPU33が、ステップS4の処理後のRGB画像を構成する各画素についてR,G,Bの輝度値が以下に示す(条件式1)を満たすか否かを判別することによって、RGB画像中に赤色の指示針の画像が含まれるか否かを判別する。判別の結果、R,G,Bの輝度値が以下に示す(条件式1)を満たす画素が存在しない場合、CPU33は、赤色の指示針の画像は含まれていないと判断し、画像解析処理をステップS7の処理に進める。一方、R,G,Bの輝度値が以下に示す(条件式1)を満たす画素が存在する場合には、CPU33は、赤色の指示針の画像が含まれていると判断し、画像解析処理をステップS6の処理に進める。
(条件式1)Rの輝度値−Gの輝度値>規定値 & Rの輝度値−Bの輝度値>規定値
【0022】
ステップS6の処理では、CPU33が、赤色の指示針の画像を構成する画素の輝度値を255に置き換えることによって、ステップS4の処理後のRGB画像から赤色の指示針の画像を除去する。これにより、ステップS6の処理は完了し、画像解析処理はステップS7の処理に進む。
【0023】
ステップS7の処理では、CPU33が、RGB画像をグレースケール画像に変換する。これにより、ステップS7の処理は完了し、画像解析処理はステップS8の処理に進む。
【0024】
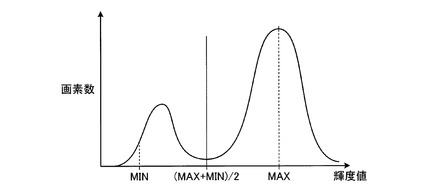
ステップS8の処理では、CPU33が、ステップS7の処理によって得られたグレースケール画像について、図5に示すような輝度値と画素数との関係を示す輝度分布のヒストグラムを作成する。これにより、ステップS8の処理は完了し、画像解析処理はステップS9の処理に進む。
【0025】
ステップS9の処理では、CPU33が、ステップS8の処理によって作成されたヒストグラムに基づいて、分布ピークの輝度値の最小値側が文字板であり、分布ピークの輝度値の最大値側が指示針であることから、分布ピークのそれぞれを最小値MINと最大値MAXとし、その平均値(MAX+MIN)/2を二値化閾値として算出する。そして、CPU33は、算出された二値化閾値以下の輝度値を有する画素の輝度値を全て0に置き換える。この処理によれば、黒色の画像が強調表示され、黒色の指示針をより正確に抽出することが可能になる。これにより、ステップS9の処理は完了し、画像解析処理はステップS10の処理に進む。
【0026】
ステップS10の処理では、CPU33が、ステップS9の処理によって得られた画像に基づいて黒色の指示針の画像を抽出し、抽出された黒色の指示針の画像に基づいて黒色の指示針の回転角度を検出する。これにより、ステップS10の処理は完了し、画像解析処理はステップS11の処理に進む。
【0027】
ステップS11の処理では、CPU33が、ステップS10の処理によって検出された黒色の指示針の回転角度及びステップS3の処理によって設定されたベーススケール及びフルスケールの値に基づいて、黒色の指示針が示す指示値を出力する。なおこの際、CPU33は、指示値がベーススケール及びフルスケールの範囲内にない場合、エラー情報を出力することが望ましい。これにより、ステップS11の処理は完了し、一連の画像解析処理は終了する。
【0028】
以上の説明から明らかなように、本発明の一実施形態である画像解析処理によれば、CPU33が、指示針の中心点及び動作開始点の情報に基づいて撮像装置2によって撮像されたメーターの画像から指示針の画像を抽出し、抽出された指示針の画像に基づいて、指示針の回転角度を検出し、指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて、指示針の回転角度を指示値に変換出力するので、指示針が示す指示値を精度高く計測することができる。
【0029】
以上、本発明者によってなされた発明を適用した実施の形態について説明したが、本実施形態による本発明の開示の一部をなす記述及び図面により本発明は限定されることはない。すなわち、本実施形態に基づいて当業者などによりなされる他の実施の形態、実施例及び運用技術などは全て本発明の範疇に含まれる。
【符号の説明】
【0030】
1 指示値計測システム
2 撮像装置
3 画像解析処理装置
4 入力装置
5 出力装置
10 機器パネル
11,11a,11b,11c メーター
31 RAM
32 ROM
32a 画像解析処理プログラム
33 CPU
【技術分野】
【0001】
本発明は、メーターの中心点を回転軸として回転する指示針が示す指示値を計測する指示値計測システムに関するものである。
【背景技術】
【0002】
水処理設備の運転制御作業では、作業員が、制御機器の状態を計測する電力計等のメーターの指示針が示す指示値を読み取り、読み取った指示値に基づいて機器を調整することが行われている。ところが、このような運転管理作業では、作業員の作業負荷が大きく、また作業員が指示値を誤認識する可能性がある。このような背景から、近年、画像処理技術を利用してメーターの指示値を計測する技術が提案されている(特許文献1参照)。具体的には、特許文献1記載の技術は、メーターの画像を撮像し、撮像された画像から指示針を含む画像を抽出し、抽出された画像に基づいて指示針の指示値を読み取るものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−258992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、画像処理技術を利用した従来の計測技術によれば、メーターの種別や指示針の動作範囲に関する情報が設定されていないために、指示針の画像を正確に抽出できないことがあった。このため、メーターの画像から指示針の画像を正確に抽出し、指示針が示す指示値を精度高く計測可能な技術の提供が期待されていた。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、指示針が示す指示値を精度高く計測可能な指示値計測システムを提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決し、目的を達成するために、本発明に係る指示値計測システムは、メーターの中心点を回転軸として回転する指示針が示す指示値を計測する指示値計測システムであって、前記メーターの画像を撮像する撮像装置と、前記撮像装置によって撮像されたメーターの画像から前記指示針が示す指示値を計測する画像解析処理装置と、を備え、前記画像解析処理装置は、少なくとも前記指示針の中心位置及び動作開始位置と前記指示針が示す指示値のベーススケール及びフルスケールとを設定する設定手段と、前記設定手段によって設定された前記指示針の中心位置及び動作開始位置の情報に基づいて、前記撮像装置によって撮像されたメーターの画像から指示針の画像を抽出する指示針画像抽出手段と、前記指示針画像抽出手段によって抽出された指示針の画像に基づいて、指示針の回転角度を検出する回転角度検出手段と、前記設定手段によって設定された前記指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて、前記回転角度検出手段によって検出された前記指示針の回転角度を指示値に変換出力する出力手段と、を備える。
【発明の効果】
【0007】
本発明に係る指示値計測システムによれば、指示針が示す指示値を精度高く計測することができる。
【図面の簡単な説明】
【0008】
【図1】図1は、本発明の一実施形態である指示値計測システムの構成を示すブロック図である。
【図2】図2は、本発明の一実施形態である画像解析処理の流れを示すフローチャートである。
【図3】図3は、指示針設定画面の一例を示す図である。
【図4】図4は、メーターの構成を示す模式図である。
【図5】図5は、輝度分布のヒストグラムの一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本発明の一実施形態である指示値計測システムの構成及び動作について説明する。
【0010】
〔指示値計測システムの構成〕
始めに、図1を参照して、本発明の一実施形態である指示値計測システムの構成について説明する。
【0011】
図1は、本発明の一実施形態である指示値計測システムの構成を示すブロック図である。図1に示すように、本発明の一実施形態である指示値計測システム1は、撮像装置2,画像解析処理装置3,入力装置4,及び出力装置5を備える。撮像装置2は、機器パネル10に設けられた複数のメーター11a,11b,11cのRGB画像を撮像し、LAN(Local Area Network)等の電気通信回線を介してRGB画像のデータを画像解析処理装置3に入力するものである。画像解析処理装置3は、パーソナルコンピュータ等の汎用の情報処理装置によって構成され、RAM31,ROM32,及びCPU33を備える。
【0012】
RAM31は、CPU33が実行する処理に関するコンピュータプログラムや制御データを一時記憶し、CPU33のワーキングエリアとして機能する。ROM32は、CPU33が実行する処理に関するコンピュータプログラムや制御データを記憶する。本実施形態では、ROM32は、後述する画像解析処理の各処理ステップをコンピュータ言語によって記述した画像解析処理プログラム32aを記憶する。CPU33は、ROM32内に記憶されているコンピュータプログラムを実行することによって画像解析処理装置3全体の動作を制御する。本実施形態では、CPU33は、画像解析処理プログラム32aを実行することによって、本発明に係る設定手段,指示針画像抽出手段,回転角度検出手段,及び指示値変換手段として機能する。
【0013】
入力装置4は、キーボード,マウスポインタ,テンキー等の入力装置によって構成され、オペレータの操作入力情報を画像解析処理装置3に入力する。出力装置5は、表示装置や印刷装置等の出力装置によって構成され、画像解析処理装置3の各種処理情報を出力する。
【0014】
〔画像解析処理〕
このような構成を有する指示値計測システム1では、画像解析処理装置3が以下に示す画像解析処理を実行することによって、メーターの画像から黒色の指示針の画像を抽出し、黒色の指示針が示す指示値(工業値)を計測する。以下、図2に示すフローチャートを参照して、この画像解析処理を実行する際の画像解析処理装置3の動作について説明する。
【0015】
図2は、本発明の一実施形態である画像解析処理の流れを示すフローチャートである。図2に示すフローチャートは、オペレータが入力装置4を操作することによって、画像解析処理の実行を指示したタイミングで開始となり、画像解析処理はステップS1の処理に進む。
【0016】
ステップS1の処理では、CPU33が、撮像装置2によって撮像されたメーター11a〜11cのRGB画像に対し輝度調整やコントラスト調整等の画像加工調整を行うことによって、メーター11a〜11cの画像が鮮明になるようにRGB画像を加工する。なお、撮像段階でメーター11a〜11cの画像が鮮明である場合には、このステップS1の処理は省略してもよい。これにより、ステップS1の処理は完了し、画像解析処理はステップS2の処理に進む。
【0017】
ステップS2の処理では、CPU33が、画像解析処理の対象となるメーターの種別を設定する。具体的には、CPU33は、図3に示すような指示針設定画面100を出力装置5に表示する。指示針設定画面100は、撮像装置2によって撮像されたRGB画像を表示する画像表示部110、メーターの種別を設定する種別設定部111、メーターのベーススケール(BS)を設定するベーススケール設定部112、メーターのフルスケール(FS)を設定するフルスケール設定部113、メーターが示す指示値の単位を設定する単位設定部114、メーターの中心点の位置座標を設定する中心点座標設定部115a,115b、指示針の動作開始点の位置座標を設定する開始点設定部116a,116bを含む。
【0018】
オペレータは、出力装置5に指示針設定画面100が表示されると、種別設定部111をプルダウン操作することによってメーターの種別のリストを表示させ、表示されたリストの中から処理対象となるメーターの種別を選択する。図3に示す例は、メーターの種別として広角度指示計が選択された例を示す。また、オペレータは、画像表示部110に表示されているRGB画像上におけるメーターの中心点及び動作開始点をクリック操作することにより、図4に示すメーター11の中心点203及び指示針204の動作開始点P1(動作範囲Rの最小値P1)の位置座標を設定する。これにより、ステップS2の処理は完了し、画像解析処理はステップS3の処理に進む。
【0019】
ステップS3の処理では、CPU33が、画像解析処理の対象となるメーターのベーススケール及びフルスケールを設定する。具体的には、オペレータは、図3に示す指示針設定画面100中のベーススケール設定部112及びフルスケール設定部113にベーススケール及びフルスケールの値を入力することによって、画像解析処理の対象となるメーターのベーススケール及びフルスケールを設定する。なお、ベーススケール及びフルスケールとは、図4に示すように、指示針204が動作範囲Rの最小値P1及び最大値P2にある時に示す指示値のことを意味する。これにより、ステップS3の処理は完了し、画像解析処理はステップS4の処理に進める。
【0020】
ステップS4の処理では、CPU33が、撮像装置2によって撮像されたRGB画像の中からステップS2の処理によって中心点の位置座標が設定されたメーターのRGB画像を抽出する。そして、CPU33は、指示針の回転軸の画像を除去するために、ステップS2の処理により設定されたメーターの中心点の位置座標に基づいてメーターの中心点から所定範囲内にある画像を抽出したRGB画像から除去する。これにより、ステップS4の処理は完了し、画像解析処理はステップS5の処理に進む。
【0021】
ステップS5の処理では、CPU33が、ステップS4の処理後のRGB画像を構成する各画素についてR,G,Bの輝度値が以下に示す(条件式1)を満たすか否かを判別することによって、RGB画像中に赤色の指示針の画像が含まれるか否かを判別する。判別の結果、R,G,Bの輝度値が以下に示す(条件式1)を満たす画素が存在しない場合、CPU33は、赤色の指示針の画像は含まれていないと判断し、画像解析処理をステップS7の処理に進める。一方、R,G,Bの輝度値が以下に示す(条件式1)を満たす画素が存在する場合には、CPU33は、赤色の指示針の画像が含まれていると判断し、画像解析処理をステップS6の処理に進める。
(条件式1)Rの輝度値−Gの輝度値>規定値 & Rの輝度値−Bの輝度値>規定値
【0022】
ステップS6の処理では、CPU33が、赤色の指示針の画像を構成する画素の輝度値を255に置き換えることによって、ステップS4の処理後のRGB画像から赤色の指示針の画像を除去する。これにより、ステップS6の処理は完了し、画像解析処理はステップS7の処理に進む。
【0023】
ステップS7の処理では、CPU33が、RGB画像をグレースケール画像に変換する。これにより、ステップS7の処理は完了し、画像解析処理はステップS8の処理に進む。
【0024】
ステップS8の処理では、CPU33が、ステップS7の処理によって得られたグレースケール画像について、図5に示すような輝度値と画素数との関係を示す輝度分布のヒストグラムを作成する。これにより、ステップS8の処理は完了し、画像解析処理はステップS9の処理に進む。
【0025】
ステップS9の処理では、CPU33が、ステップS8の処理によって作成されたヒストグラムに基づいて、分布ピークの輝度値の最小値側が文字板であり、分布ピークの輝度値の最大値側が指示針であることから、分布ピークのそれぞれを最小値MINと最大値MAXとし、その平均値(MAX+MIN)/2を二値化閾値として算出する。そして、CPU33は、算出された二値化閾値以下の輝度値を有する画素の輝度値を全て0に置き換える。この処理によれば、黒色の画像が強調表示され、黒色の指示針をより正確に抽出することが可能になる。これにより、ステップS9の処理は完了し、画像解析処理はステップS10の処理に進む。
【0026】
ステップS10の処理では、CPU33が、ステップS9の処理によって得られた画像に基づいて黒色の指示針の画像を抽出し、抽出された黒色の指示針の画像に基づいて黒色の指示針の回転角度を検出する。これにより、ステップS10の処理は完了し、画像解析処理はステップS11の処理に進む。
【0027】
ステップS11の処理では、CPU33が、ステップS10の処理によって検出された黒色の指示針の回転角度及びステップS3の処理によって設定されたベーススケール及びフルスケールの値に基づいて、黒色の指示針が示す指示値を出力する。なおこの際、CPU33は、指示値がベーススケール及びフルスケールの範囲内にない場合、エラー情報を出力することが望ましい。これにより、ステップS11の処理は完了し、一連の画像解析処理は終了する。
【0028】
以上の説明から明らかなように、本発明の一実施形態である画像解析処理によれば、CPU33が、指示針の中心点及び動作開始点の情報に基づいて撮像装置2によって撮像されたメーターの画像から指示針の画像を抽出し、抽出された指示針の画像に基づいて、指示針の回転角度を検出し、指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて、指示針の回転角度を指示値に変換出力するので、指示針が示す指示値を精度高く計測することができる。
【0029】
以上、本発明者によってなされた発明を適用した実施の形態について説明したが、本実施形態による本発明の開示の一部をなす記述及び図面により本発明は限定されることはない。すなわち、本実施形態に基づいて当業者などによりなされる他の実施の形態、実施例及び運用技術などは全て本発明の範疇に含まれる。
【符号の説明】
【0030】
1 指示値計測システム
2 撮像装置
3 画像解析処理装置
4 入力装置
5 出力装置
10 機器パネル
11,11a,11b,11c メーター
31 RAM
32 ROM
32a 画像解析処理プログラム
33 CPU
【特許請求の範囲】
【請求項1】
メーターの中心点を回転軸として回転する指示針が示す指示値を計測する指示値計測システムであって、
前記メーターの画像を撮像する撮像装置と、
前記撮像装置によって撮像されたメーターの画像から前記指示針が示す指示値を計測する画像解析処理装置と、を備え、
前記画像解析処理装置は、
少なくとも前記指示針の中心位置及び動作開始位置と前記指示針が示す指示値のベーススケール及びフルスケールとを設定する設定手段と、
前記設定手段によって設定された前記指示針の中心位置及び動作開始位置の情報に基づいて前記撮像装置によって撮像されたメーターの画像から指示針の画像を抽出する指示針画像抽出手段と、
前記指示針画像抽出手段によって抽出された指示針の画像に基づいて、指示針の回転角度を検出する回転角度検出手段と、
前記設定手段によって設定された前記指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて、前記回転角度検出手段によって検出された前記指示針の回転角度を指示値に変換出力する指示値変換手段と、
を備えることを特徴とする指示値計測システム。
【請求項2】
前記出力手段は、変換出力する指示値が前記設定手段によって設定されたベーススケール及びフルスケールの範囲内にない場合、エラー情報を出力することを特徴とする請求項1に記載の指示値計測システム。
【請求項3】
前記指示針画像抽出手段は、前記設定手段によって設定された指示針の中心位置の情報に基づいて、前記撮像装置によって撮像されたメーターの画像から指示針の回転軸の画像を除去するメーター中心除去手段を備えることを特徴とする請求項1又は2に記載の指示値計測システム。
【請求項4】
前記指示針画像抽出手段は、前記撮像装置によって撮像されたカラー画像をグレースケール画像に変換し、グレースケール画像を構成する画素のうち、輝度値が所定の閾値以下である画素の輝度値を0に置き換える黒針強調補正手段を備えることを特徴とする請求項1〜3のうち、いずれか1項に記載の指示値計測システム。
【請求項5】
前記黒針強調補正手段は、前記グレースケール画像を構成する画素の輝度分布に基づいて前記所定の閾値を決定することを特徴とする請求項4に記載の指示値計測システム。
【請求項6】
前記指示針画像抽出手段は、前記撮像装置によって撮像されたメーターの画像の中に赤色の指示針の画像が含まれているか否かを判別し、赤色の指示針の画像が含まれている場合、赤色の指示針の画像を除去する赤色弱調補正手段を備えることを特徴とする請求項1〜5のうち、いずれか1項に記載の指示値計測システム。
【請求項1】
メーターの中心点を回転軸として回転する指示針が示す指示値を計測する指示値計測システムであって、
前記メーターの画像を撮像する撮像装置と、
前記撮像装置によって撮像されたメーターの画像から前記指示針が示す指示値を計測する画像解析処理装置と、を備え、
前記画像解析処理装置は、
少なくとも前記指示針の中心位置及び動作開始位置と前記指示針が示す指示値のベーススケール及びフルスケールとを設定する設定手段と、
前記設定手段によって設定された前記指示針の中心位置及び動作開始位置の情報に基づいて前記撮像装置によって撮像されたメーターの画像から指示針の画像を抽出する指示針画像抽出手段と、
前記指示針画像抽出手段によって抽出された指示針の画像に基づいて、指示針の回転角度を検出する回転角度検出手段と、
前記設定手段によって設定された前記指示針が示す指示値のベーススケール及びフルスケールの情報に基づいて、前記回転角度検出手段によって検出された前記指示針の回転角度を指示値に変換出力する指示値変換手段と、
を備えることを特徴とする指示値計測システム。
【請求項2】
前記出力手段は、変換出力する指示値が前記設定手段によって設定されたベーススケール及びフルスケールの範囲内にない場合、エラー情報を出力することを特徴とする請求項1に記載の指示値計測システム。
【請求項3】
前記指示針画像抽出手段は、前記設定手段によって設定された指示針の中心位置の情報に基づいて、前記撮像装置によって撮像されたメーターの画像から指示針の回転軸の画像を除去するメーター中心除去手段を備えることを特徴とする請求項1又は2に記載の指示値計測システム。
【請求項4】
前記指示針画像抽出手段は、前記撮像装置によって撮像されたカラー画像をグレースケール画像に変換し、グレースケール画像を構成する画素のうち、輝度値が所定の閾値以下である画素の輝度値を0に置き換える黒針強調補正手段を備えることを特徴とする請求項1〜3のうち、いずれか1項に記載の指示値計測システム。
【請求項5】
前記黒針強調補正手段は、前記グレースケール画像を構成する画素の輝度分布に基づいて前記所定の閾値を決定することを特徴とする請求項4に記載の指示値計測システム。
【請求項6】
前記指示針画像抽出手段は、前記撮像装置によって撮像されたメーターの画像の中に赤色の指示針の画像が含まれているか否かを判別し、赤色の指示針の画像が含まれている場合、赤色の指示針の画像を除去する赤色弱調補正手段を備えることを特徴とする請求項1〜5のうち、いずれか1項に記載の指示値計測システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−146154(P2012−146154A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−4491(P2011−4491)
【出願日】平成23年1月13日(2011.1.13)
【出願人】(507214083)メタウォーター株式会社 (277)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月13日(2011.1.13)
【出願人】(507214083)メタウォーター株式会社 (277)
【Fターム(参考)】
[ Back to top ]