
指示支援装置
【課題】本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関し、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できることを目的とする。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関する。
【背景技術】
【0002】
レーダ装置等に代表される探知装置では、例えば、時系列の順に行われた複数回のスキャンにより得られた目標の位置や速度等の履歴に基づいて、後続するスキャンによって得られるその目標の位置の推定が行われ、その推定の下で最も確からしい目標の候補を捕捉する追尾の処理が行われる。
【0003】
このような追尾は、その追尾の対象となる目標が他の目標に対して十分に離れている場合、および個々の目標から到来した反射に付帯する不要波が少ない場合には、比較的安定にかつ精度よく実現される。
【0004】
しかし、例えば、多数の目標が密集している航路上などでは、一般に、複数の目標(レーダ装置が搭載された船舶を含む。)が接近する場面が往々にして発生する。
【0005】
例えば、2つの目標は、上記探知装置の距離や方位にかかわる分解能の限界(複数の目標をそれぞれ固有に識別できる最小の間隔、方位角、仰角の最小の差)を超える程度にまで近接する状態では、追尾ゲート内では1個の目標として観測され、さらに、このような状態から脱却した状態では、次のような事象(以下、「乗り移り現象」という。)が発生し得る。
【0006】
(1) 上記2つの目標に付与されていた固有のID情報と、これらの2つの目標の位置や速度の履歴がお互いに入れ替わる。
(2) このようにして位置や速度の履歴が入れ替わった後に、上記2つの目標の片方が消失したと誤認識される。
【0007】
さらに、上記「乗り移り現象」は、目標同士だけではなく、例えば、目標とその目標の周辺に位置するクラッタとの間でも発生し得る。
【0008】
従来、上述した環境や背景の下でも追尾の精度や信頼性を高く確保する技術としては、例えば、以下に示す指示支援装置があった。
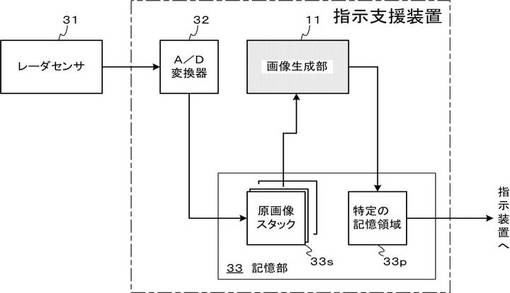
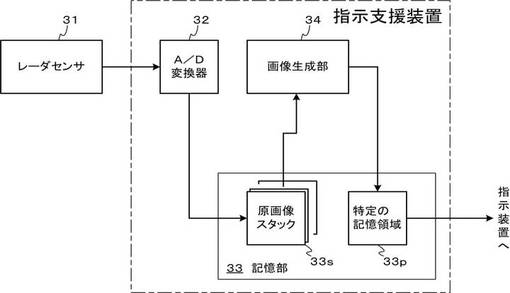
図3は、従来の指示支援装置の構成例を示す図である。
図3に示す指示支援装置は、以下の要素から構成される。
【0009】
(1) 図示しない空中線に目標から到来した反射波に所定の処理を施すレーダセンサ31
(2) その処理の下で生成されたレーダ信号が入力されるA/D変換器32
(3) A/D変換器32の出力に接続された第一の書き込みポートと、図示されない指示装置に接続された第一の読み出しポートとを有する記憶部33
(4) 記憶部33の第二の読み出しポートと第二の書き込みポートとに接続された画像生成部34
【0010】
図4は、従来の指示支援装置の動作フローチャートである。
以下、図3および図4を参照して従来の指示支援装置の動作を説明する。
A/D変換器32は、上記レーダ信号をディジタル信号に変換することによりディジタルレーダ信号を生成し、記憶部33の所定の記憶領域にスキャン毎に対応する面の集合として配置された原画像スタック33sに、そのディジタルレーダ信号をサイクリックに書き込み、かつ蓄積する。
【0011】
画像生成部34は、上記原画スタック33sに時系列(レンジおよびスキャン)の順に蓄積されたディジタルレーダ信号の列に以下の処理(1)〜(5)をスイープ周期で施す。
【0012】
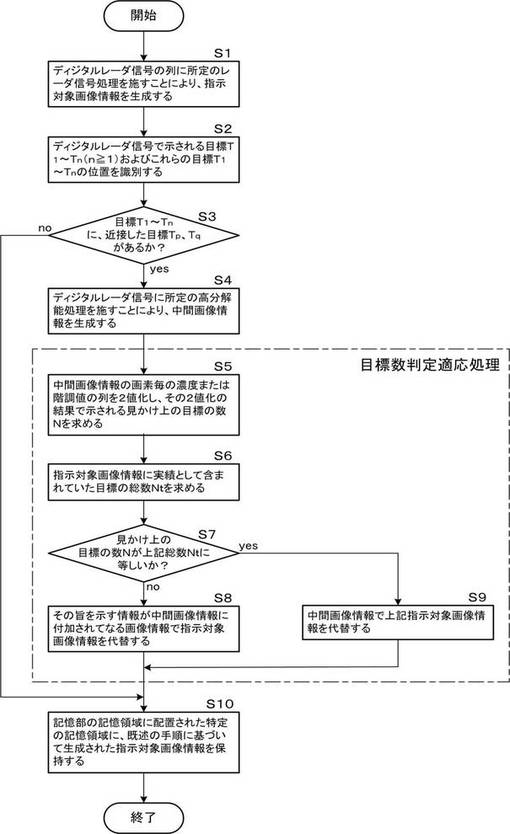
(1) ディジタルレーダ信号の列に所定のレーダ信号処理(クラッタの除去、所望の目標の追尾等を実現する処理を含む。)を施すことにより、画像情報(以下、「指示対象画像情報」という。)を生成する(図4ステップS1)。
【0013】
(2) 上記ディジタルレーダ信号で示される目標T1〜Tn(n≧1)およびこれらの目標T1〜Tnの位置(例えば、方位角および距離の組み合わせとして与えられる。)を識別する(図4ステップS2)。
【0014】
(3) 上記レーダ信号処理の過程で行われる所望の目標の追尾の下で行われ、かつ目標T1〜Tnに、相対的な距離が所定の下限値を下回る程度に接近した目標Tp、Tq(1≦p≦n,1≦q≦n,p≠q)があるか否かの判別を行う(図4ステップS3)。
【0015】
(4) このような接近した目標Tp、Tq(1≦p≦n,1≦q≦n,p≠q)がある場合には、以下の処理(4-1)〜(4-5)を行う。
【0016】
(4-1) ディジタルレーダ信号に所定の高分解能処理を施すことにより、画像情報(以下、「中間画像情報」という。)を生成する(図4ステップS4)。
【0017】
(4-2) さらに、例えば、上記中間画像情報の画素毎の濃度または階調値の列を2値化し、その2値化の結果で示される見かけ上の目標の数Nを求める(図4ステップS5)。
【0018】
(4-3) 上記指示対象画像情報に実績として含まれていた目標の総数Nt(例えば、既述の追尾の下で識別される。)を求める(図4ステップS6)
【0019】
(4-3) 上記見かけ上の目標の数Nが上記総数Ntに等しいか否か判別する(図4ステップS7)。
(4-4) 目標の数Nが上記総数Ntに等しくない場合には、その旨を示す情報(文字、記号その他の如何なる表示属性で示されてもよい。)が上記中間画像情報に付加されてなる画像情報で上記指示対象画像情報を代替する(図4ステップS8)。
【0020】
(4-5) 目標の数Nが上記総数Ntに等しい場合には、上記中間画像情報で上記指示対象画像情報を代替する(図4ステップS9)。なお、以下では、上記(4-2)〜(4-5)項に記載された処理(図4ステップS5〜S9)については、「目標数判定適応処理」と称する。
【0021】
(5) 記憶部33の記憶領域に既述の原画像スタック33sとは別に配置された特定の記憶領域33pに、既述の手順に基づいて生成された指示対象画像情報を保持する(図4ステップS10)。
【0022】
このようにして特定の記憶領域33pに保持された指示対象画像情報は、例えば、スイープ周期毎に既述の指示装置に引き渡され、所定の指示方式で(例えば、PPI(Plan Position Indicator)スコープとして)指示される。
【0023】
したがって、相対距離が既述の下限値を下回る程度に接近した目標Tp、Tqは、上記高分解能処理による区分が可能である限り、個別の目標として指示画面上に出力される。
なお、本発明に関連性がある先行技術としては、以下に列記する特許文献1ないし特許文献5および非特許文献1がある。
【0024】
(1) 「目標位置検出部において、目標エコー検出部は目標とする船舶のエコー信号を検出し、目標位置推定部において、目標船舶の過去の位置から次スキャンにおける目標位置の推定値と分散を算出し、目標大きさ推定部は、目標船舶の過去の面積から次スキャンにおける目標面積の推定値と分散を算出し、さらに、これら目標位置の推定値とその分散および目標面積の推定値とその分散から目標の確からしさ算出部において、目標の確からしさを算出し、この目標の確からしさに基づいて、目標の最新の推定位置を算出する」ことによって、「目標の識別精度、追尾精度が向上する」点に特徴がある船舶用衝突予防援助装置…特許文献1
【0025】
(2) 「レーダアンテナからの受信データを入力し、該受信データにより決定する映像の実測位置と前回の映像の追尾情報に基づいて、次回の位置を予測する物標追尾装置において、前記受信データを所定時間毎に読み、該読込みに伴って、受信データが複数のときは、その複数の受信データを識別映像データとして抽出する識別映像抽出手段と、前記識別映像データを入力して記憶し、該識別映像データに含まれる映像をそれぞれ分離映像とし、該分離映像毎に、その中心位置、面積、距離間隔を求め、これらを分離映像の特徴として出力する分離映像特徴算出手段と、前記分離映像の特徴が算出される毎に、その分離映像の前記特徴に基づいて、両分離映像が接するまで拡大させ、該拡大映像を両分離映像が結合している1物標の結合映像面積として推定する結合映像推定手段と、前記結合映像面積が算出される毎に、その結合映像面積と両分離映像の面積の和との面積比率と前記距離間隔と両分離映像の半径の長さとの比率との積に基づいて前記拡大倍率を求め、この拡大倍率に基づいて、前記分離映像が1物標毎に対応するか又は1物標による結合映像かどうかを判定し、この判断結果を前記追尾部に知らせる映像分離・結合判定手段とを有する」ことにより、「複数の映像が発生したときは、本当に複数の船舶があって複数映像になっているか又は1つの船舶によって複数の映像が発生したのかを容易に判定し、追尾誤りを発生させない」点に特徴がある物標追尾装置…特許文献2
【0026】
(3) 「情報を処理する処理装置と、重複判定装置と、分離判定装置と、追尾装置とを有し、
上記重複判定装置は、上記処理装置を用いて、観測された目標の位置を表わす目標位置情報に基づいて、追尾中の目標を含む複数の目標が重なって一つの目標として観測されたか否かを判定し、上記分離判定装置は、上記処理装置を用いて、上記複数の目標が重なって一つの目標として観測されたと上記重複判定装置が判定した場合に、上記目標位置情報に基づいて、重なった複数の目標が離れて再び複数の目標として観測されたか否かを判定し、上記追尾装置は、上記処理装置を用いて、上記重なった複数の目標が離れて再び複数の目標として観測されたと上記分離判定装置が判定した場合に、上記重なった複数の目標が離れて観測された複数の目標のうちのいずれかの目標を、上記追尾中の目標として追尾する」ことにより、「複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる」点に特徴がある画像処理装置…特許文献3
【0027】
(4) 「原画像データに対し、反復法によりデコンボリューション処理を行うデコンボリューション処理部と、各反復演算ステップにおける演算結果に対して、原画像データに基づいて生成されたマスクデータに基づいてマスク処理を行い、虚像の発生を抑制するマスク処理部と、ゲイン補正部42においてデコンボリューション処理された画像データのゲインを補正し、境界補正部43において目標境界近傍において生じた虚像を除去する」ことにより、「画像取得装置における分解能が向上する」点に特徴があるデコンボリューション処理装置…特許文献4
【0028】
(5) 「劣化画像を復元して理想画像を近似した画像を生成する画像処理装置であって、前記劣化画像の画素値を初期値として用いた復元画像の各画素値を反復計算により更新することにより前記劣化画像を復元する反復復元部と、前記復元画像の各画素の近傍領域における画素値の分散を推定する画像分散推定部と、前記復元画像の各画素の近傍領域におけるノイズの分散を推定するノイズ分散推定部と、前記復元画像の各画素について前記画素値の分散と前記ノイズの分散の差分を評価し、前記差分の評価にもとづいて前記反復計算により前記復元画像の各画素値を更新するか否かを判定する更新判定部とを含む」ことにより、「高い精度で劣化画像を復元する」点に特徴がある画像処理装置…特許文献5
【先行技術文献】
【特許文献】
【0029】
【特許文献1】特開2000−298169号公報
【特許文献2】特開平7−191134号公報
【特許文献3】特開2009−109293号公報
【特許文献4】特開2002−008004号公報
【特許文献5】特開2007−299068号公報
【非特許文献】
【0030】
【非特許文献1】南茂夫、河田聡著「科学計測のためのデータ処理入門」CQ出版社2001
【発明の概要】
【発明が解決しようとする課題】
【0031】
ところで、上述した従来例では、近接した目標Tp、Tqの区分は、反復アルゴリズムであって、反復の回数が予め所定の値に設定される高分解能アルゴリズム、もしくは反復の回数が所定の範囲で可変された高分解能アルゴリズムに基づいて実現されていた。
また、このような高分解能アルゴリズムは、一般に、区分がなされるべき目標の数が多いほど、高度かつ複雑となる場合が多かった。
【0032】
すなわち、これらの目標Tp、Tqの相対的な距離が比較的大きい場合、あるいは両者の相対的な配置関係が上記区分が比較的容易に実現可能な形態である場合には、既述の反復リゴリズムに基づいて処理が反復されるべき回数が多かった。
【0033】
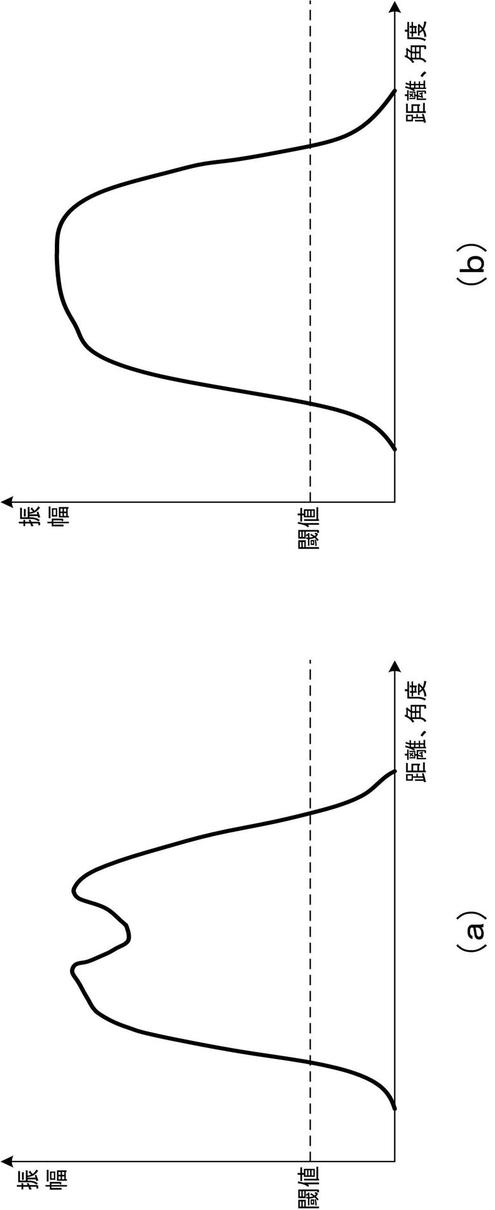
また、レーダセンサ31に目標Tp、Tqから到来する反射波のレベルの時間軸上における尖頭値の間隔τは、一般に、そのレーダセンサ31の空中線系の主ローブの幅より小さく、この空中線系より放射された送信波のパルス幅より小さい。
【0034】
しかし、これらの目標Tp、Tqから到来する反射波のレベルの時間軸上における分布については、図5(a),(b)にそれぞれ示すように、レンジ(距離)方向とスキャン(方位角)方向との何れにおいても、くぼみが形成される場合(以下、「ケースA」という。)と、反対に形成されない場合(以下、「ケースB」という。)とがある。
【0035】
しかも、反復アルゴリズムに基づいて処理が反復されるべき回数には、上記ケースBでは、上記ケースAに比べて数十倍にも亘る格差があるにもかかわらず、上記反復アリゴリズムに基づいて処理が反復されるべき回数が1通りしかなかった。
したがって、画像生成部34に過度の処理量が要求され、あるいは応答性や実時間性が低下したり損なわれる可能性があった。
【0036】
本発明は、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できる指示支援装置を提供することを目的とする。
【課題を解決するための手段】
【0037】
請求項1に記載の発明では、判別手段は、到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する。適応処理手段は、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する。
【0038】
すなわち、上記反射波または画像で示される複数mの目標が個別に区分できる可能性が既述の閾値を超える程度に高い場合には、高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づく処理により、これらの目標の区分が図られる。
【0039】
請求項2に記載の発明では、判別手段は、到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する。適応処理手段は、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムと、簡易アルゴリズムより所要する処理量が多い特定のアルゴリズムまたは前記高分解能アリゴリズムとに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する。
【0040】
すなわち、上記反射波または画像で示される複数mの目標が個別に区分できる可能性が既述の閾値を超える程度に高い場合には、高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づく処理が優先的に行われ、かつ高分解能アルゴリズムに基づく処理に要する処理量が少なく抑えられることにより、これらの目標の区分が図られる。
【0041】
請求項3に記載の発明では、請求項1または請求項2に記載の指示支援装置において、前記適応処理手段は、前記高分解能アルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る。
【0042】
すなわち、高分解能アルゴリズムに基づく処理が反復される回数は、上記複数mの目標の区分が達成される最小の回数に抑えられる。
【0043】
請求項4に記載の発明では、請求項1または請求項2に記載の指示支援装置において、前記適応処理手段は、前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記高分解能アルゴリズムに基づく処理を反復する。
【0044】
すなわち、高分解能アルゴリズムに基づく処理が反復される回数は、上記複数mの目標が区分される可能性が所望の値となる既定の回数に抑えられる。
【0045】
請求項5に記載の発明では、請求項2に記載の指示支援装置において、前記適応処理手段は、前記特定のアルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る。
すなわち、特定のアルゴリズムに基づく処理が反復される回数は、上記複数mの目標の区分が達成される最小の回数に抑えられる。
【発明の効果】
【0046】
本発明によれば、近接した複数の目標の区分は、その区分のために行われるべき処理の処理量が平均的に少なく抑えられるにもかかわらず、確度高く実現される。
【0047】
また、本発明では、複数の目標が近接する形態に対する柔軟な適応が図られ、これらの目標の区分に要する処理量が低く抑えられる。
【0048】
したがって、本発明が適用された測位系や測距系では、構成の複雑化やコストの増加を伴うことなく、応答性および総合的な性能が向上し、かつ余剰の処理量が多様に活用されることにより付加価値と総合的な信頼とが高められる。
【図面の簡単な説明】
【0049】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の動作フローチャート図である。
【図3】従来の指示支援装置の構成例を示す図である。
【図4】従来の指示支援装置の動作フローチャートである。
【図5】従来例の課題を説明する図である。
【発明を実施するための形態】
【0050】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
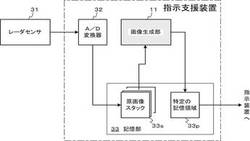
図1は、本発明の一実施形態を示す図である。
図において、図3に示す従来例と機能および構成が同じ要素については、同じ符号を付与し、ここではその詳細な説明を省略する。
【0051】
本実施形態と図3に示す従来例との構成の相違点は、画像生成部34に代えて画像生成部11が備えられた点にある。
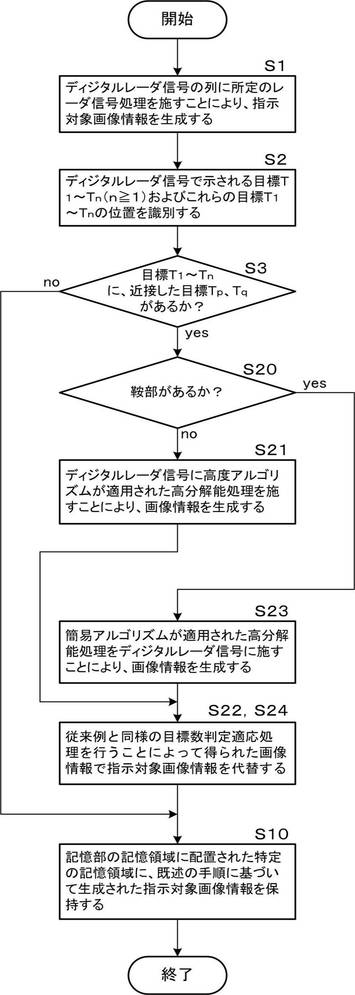
図2は、本実施形態の動作フローチャートである。
以下、図1および図2を参照して本実施形態の動作を説明する。
【0052】
本発明の特徴は、本実施形態では、画像生成部11によって行われる下記の処理の手順にある。なお、以下では、図3に示す従来例と同様にして行われる処理については、図2の対応する処理に図4に示されたステップ番号と同じステップ番号を付与し、ここでは、詳細な説明を省略する。
画像生成部34は、上記原画スタック33sに時系列(レンジおよびスキャン)の順に蓄積されたディジタルレーダ信号の列に以下の処理(1)〜(6)をスイープ周期で施す。
【0053】
(1) ディジタルレーダ信号の列に所定のレーダ信号処理(クラッタの除去、所望の目標の追尾等を実現する処理を含む。)を施すことにより、画像情報(以下、「指示対象画像情報」という。)を生成し(図2ステップS1)、上記ディジタルレーダ信号の列で示される目標T1〜Tn(n≧1)およびこれらの目標T1〜Tnの位置(例えば、方位角および距離の組み合わせとして与えられる。)を識別する(図2ステップS2)。
【0054】
(2) 目標T1〜Tnに、上記レーダ信号処理の過程で行われる所望の目標の追尾の下で行われ、かつ相対距離が所定の下限値を下回る程度に接近した目標Tp、Tq(1≦p≦n,1≦q≦n,p≠q)があるか否かの判別を行う(図2ステップS3)。
【0055】
(4) このような接近した目標Tp、Tqがある場合には、以下の処理(4-1)〜(4-3)を行う。
【0056】
(4-1) 指示対象画像上で一体化されて表示される目標Tp、Tqの外形を識別し、その外形にくびれやくぼみ(以下、「鞍部」という。)があるか否かを判別する(図2ステップS20)。
(4-2) このような鞍部がない場合には、上記ディジタルレーダ信号に所定のアルゴリズム(以下、「高度アルゴリズム」という。)が適用された高分解能処理(従来例に適用された高分解能処理であってもよい。)を施すことにより、画像情報を生成し(図2ステップS21)、さらに、従来例と同様の「目標数判定適応処理」を行うことによって得られた画像情報で既述の指示対象画像情報を代替する(図2ステップS22)。
【0057】
(4-3) 反対に、上記鞍部がある場合には、上記高度アルゴリズムに比べて所要する処理量が少なく、かつ所望の精度や確度で上記目標Tp、Tqの区分を実現可能なアルゴリズム(以下、「簡易アルゴリズム」という。)が適用された高分解能処理を既述のディジタルレーダ信号に施すことにより、画像情報を生成し(図2ステップS23)、さらに、従来例と同様の「目標数判定適応処理」を行うことによって得られた画像情報で既述の指示対象画像情報を代替する(図2ステップS24)。
【0058】
(5) 既述の通りに記憶部33の記憶領域に配置された特定の記憶領域33pに、上記手順に基づいて生成された指示対象画像情報を保持する(図2ステップS10)。
【0059】
このようにして特定の記憶領域33pに保持された指示対象画像情報は、スイープ周期で既述の指示装置に引き渡され、所定の指示方式に基づくスコープとして表示される。
【0060】
すなわち、本発明によれば、相対距離が既述の下限値を下回る程度に接近した目標Tp、Tqの区分のために行われる高分解能処理のアルゴリズムは、高度アルゴリズムだけではなく、これらの目標Tp、Tqの相対的な距離や位置、目標Tp、Tqを結ぶ線のレンジ方向やスキャン方向に対する傾斜等に応じて選択され、かつ所要する処理量が高度アルゴリズムに比べて少ない簡易アルゴリズムに設定される。
【0061】
このように本発明が適用されたレーダ装置では、目標T1〜Tnの多様な移動や位置に柔軟に適応して、これらの目標T1〜Tnの指示に要する処理量が平均的に低く抑えられ、かつその指示の精度および応答性が向上する。
【0062】
さらに、本発明が適用されたレーダ装置では、目標の追尾が行われる場合であっても、その追尾の対象となる目標の消失と、指示画面上における不自然な表示とが極力回避され、性能、信頼性および価格性能比が総合的に高められる。
【0063】
なお、本実施形態では、既述の高度アルゴリズムとしては、例えば、最大エントロピー法
(Maximum
Entropy Method)、Richardson-Lucy法、最尤法(Maximum Likelihood)、EM(Expectation-maximization)法、Map法(Maximum
A-Posteriori)等の適用が可能である。
【0064】
また、本実施形態では、既述の簡易アルゴリズムとしては、例えば、正規化付き共役勾配法、勾配投影法、あるいは既述の特許文献4(特開2002−008004号公報)に開示されるデコンボリューション処理装置のように、計算コストが軽い「拘束付き最小自乗規範」等の適用が可能である。
【0065】
さらに、本実施形態では、高度アルゴリズムと簡易アルゴリズムとの何れに基づく高分解能処理も、2次元あるいは3次元の方向に一括して行われなくてもよく、例えば、距離方向と角度方向とのそれぞれに関する1次元方向の処理が所望の順序で直列に行われてもよい。なお、近接する目標Tp、Tqから個別に到来する反射波のレベルの最大点を結ぶ直線Lと、距離(レンジ)方向あるいは方位角や仰角(スキャン)方向を示す軸との交叉角が大きい場合には、上記高分解能処理は、それぞれ方位角や仰角(スキャン)方向または距離(レンジ)方向における一次元の処理として行われてもよい。
【0066】
また、本実施形態では、例えば、既述の鞍部の有無の判定の基準のように、目標Tp、Tqが近接している程度や形態に応じたこれらの目標Tp、Tqの区分の可否や難易度を示す融合度は、例えば、以下に列記する融合度(1)〜(11)(所望の精度による近似を含む。)の何れであってもよい。
【0067】
(1) 目標Tp、Tqが近接していない状態においてこれらの目標Tp、Tqをそれぞれ示す画像の面積(例えば、画素の数として与えられる。)S1,S2がほぼ一定であることを前提とし、目標Tp、Tqが近接した状態でこれらの目標Tp、Tqを含む見かけ上の1つの画像の面積S3(例えば、画素の数として与えられ、目標Tp、Tqが著しく近接した状態では、(S1+S2)未満となる。)と、該当するレーダ装置の分解能に基づいて予め設定される閾値Sthとの差(または比)として与えられる融合度
【0068】
(2) 互いに近接した目標Tp、Tqを示す1つの画像の面積(例えば、画素の数として与えられる。)Sと、その画像の外周の長さ(例えば、画素の間隔で正規化されて与えられる。)Lとの比(=S/L)と、規定の閾値(上記面積Sと長さLとの双方もしくは何れか一方に対して算定されあるいは予め設定されてもよい。)との差または比(該当する画像の真円度を示す。)として与えられる融合度
【0069】
(3) データベース等として予め登録され、かつ互いに近接した複数の目標を示すと共に個別に既述の融合度に対応付けられた1つの画像のパターンの内、互いに近接した目標Tp、Tqを実際に含む画像に最も高い精度で整合する特定のパターンに予め対応付けられた融合度
【0070】
(4) 近接した目標Tp、Tqを示す1つの画像(これらの目標Tp、Tqが含まれる画像の部位の内側が切り出されることによって、独立な像や目標と誤認識されることの回避が図られてもよい。)の濃度、階調値(もしくは、その画像を示すレーダ信号の振幅)の分布として与えられる融合度
【0071】
(5) 目標Tp、Tqが近接する前に開始された追尾の下で予測されたこれらの目標Tp、Tqの距離dと、レーダの分解能に基づいて予め設定された閾値dthとの比または差として与えられる融合度
【0072】
(6) AIS(Automatic Identification System)によって与えられる目標Tp、Tqの位置Pp、Pq(AISによって更新される頻度が低い場合には、予測や追尾の下で補完されてもよい。)の差として上記距離dが算出される点を除いて上記(5) 項と同様に与えられる融合度
【0073】
(7) 目標Tp、Tqの視線の後方に位置する目標(陸、島、大型の船舶、海底、温度躍層等)から到来する反射波(海面反射に代表される不要波であってもよい。)のレベルの低下分に基づいて換算される融合度
【0074】
(8) 操作者が目標Tp、Tqの距離や上記レベルの低下分を目視する(レーダ装置等の)操作者によって設定される融合度
【0075】
(9) 自船と他船、または他船同士の衝突の危険性を示す警報(異なるレーダとの連係等によって与えられてもよい。)の有無として与えられる融合度
【0076】
(10)航行の安全等を目的として何らかの通信路を介して引き渡される情報の監視や解析の下で識別される融合度
【0077】
(11)規定の回数に亘って探索目的の前処理として高分解能処理を反復し、その高分解能処理の反復の過程における収束の速度、または誤差の大きさとして評価される融合度
【0078】
また、本発明は、既述のレーダ装置だけではなく、例えば、電波に代えてレーザ光等が適用された光学的なレーダ装置、あるいはカメラ等の光学機器にも同様に適用可能であり、これらのレーダ装置や光学機器では、上述した融合度は、以下に列記する融合度(1)〜(3)の何れで代替されてもよい。
【0079】
(1) 近接した目標Tp、Tq間に生じる光学的な写し込み、反射、遮蔽等に起因する色合い(明度や彩度を含む。)の変化として評価される融合度
【0080】
(2) 近接した目標Tp、Tqと、これらの目標Tp、Tqの双方もしくは何れか一方の影と間に生じる光学的な写し込み、反射等に起因する色合い(明度や彩度を含む。)の変化として評価される融合度
【0081】
(3) 目標Tp、Tqの近接に応じた「これらの目標Tp、Tqの間の色合い(明度や彩度を含む。)、大気の速度場、温度、圧力などの物理的な変化」として評価される融合度
【0082】
さらに、上述した多様な融合度は、例えば、以下に列記するように、互いに連係する複数の異なる装置の如何なる機能分散や負荷分散の下で求められ、かつ適用されてもよい。
【0083】
(1) カメラ等のレーダ以外の光学機器によって求められた融合度がレーダ装置に引き渡されて適用される。
(2) 互いに連係する一方のレーダ装置によって求められた融合度が他方のレーダ装置に引き渡されて適用される。
【0084】
また、既述の鞍部の有無の判定の対象は、画像処理ではなくレーダ信号処理の下で識別されるべき複数次元の目標であってもよい。
【0085】
さらに、本実施形態では、上記目標T1〜Tnの内、相対距離が既述の下限値を下回る程度に接近し、あるいは接近し得る目標の特定および数は、追尾処理の下で識別されなくてもよく、例えば、指示画面を目視する操作者によって直接識別(設定)され、あるいはAIS等の航行支援装置との連係の下で識別されてもよい。
【0086】
また、本実施形態では、高度アルゴリズムや簡易アルゴリズムに基づいて高分解能処理が施されるべき領域は、上記目標Tp、Tqおよびその周囲等のような追尾ゲート内に限定されず、例えば、本発明が適用されたレーダ装置の操作部を介して操作者によって指定され、またはそのレーダ装置に搭載された制御系の主導の下で自動的にもしくは半自動的に設定されてもよい。
【0087】
さらに、本実施形態では、上記相対距離が既述の下限値を下回る程度に接近し、あるいは接近し得る目標の数は、「2」に限定されず、例えば、「3」以上である場合には、該当する3つ以上の目標の内、2つずつに関して既述の処理が行われ、あるいはこれらの3つの目標の全てに関して既述の処理が一括して行われてもよい。
【0088】
また、本実施形態では、既述の簡易アルゴリズムに基づく高分解能処理の結果から識別される目標の数Nと、追尾処理等の下で識別される目標の総数Ntとが一致しないときには、例えば、その高分解能処理に続いて、その簡易アルゴリズムより所要する処理量が多くても目標の区分をより精度よく実現可能なアルゴリズム(以下、「代替アルゴリズム」という。既述の高度アルゴリズムであってもよい。)に基づく高分解能処理が施されてもよい。
【0089】
さらに、このような代替アルゴリズムに基づく高分解能処理は、所定の処理の反復処理である場合には、上記目標の総数Ntと数Nとが一致する時点で後続する反復処理が打ち切られることにより、無用な処理量の増加が回避されてもよい。
【0090】
また、上記目標の数Nについては、例えば、既述のディジタルレーダ信号の振幅の下で識別可能であるが、その他の如何なる処理により識別されてもよい。
【0091】
さらに、上記反復の回数に上限値が設定され、その上限値に等しい回数に亘って反復処理が行われても、上記目標の総数Ntと数Nとが一致しない場合には、例えば、従来例と同様に、その旨を示す情報(文字、記号その他の如何なる表示属性で示されてもよい。)が指示対象画像情報に付加されて所定の指示方式に基づいて表示され、あるいは視覚情報や音響情報等として出力されてもよい。
【0092】
また、本発明は、融合度の算出と、その融合度に応じて高度アルゴリズムまたは簡易アルゴリズムに基づいて行われる高分解能処理とは、指示装置の画面に表示されるPPIスコープ等の画像情報を生成する画像処理として実現されている。
【0093】
しかし、このような融合度の算出と高分解能処理との双方もしくは何れか一方は、MTIや海面反射除去と同様にレーダ信号処理の過程で行われてもよい。
【0094】
さらに、本発明は、レーダ装置に限定されず、例えば、魚群探知機、ソナー、光学カメラ(赤外線カメラを含む。)、レンジファインダ、合成開口レーダ、天体望遠鏡、温度センサにも同様に適用可能である。
【0095】
また、このように本発明が適用されるレーダ装置等によって測位や測距が行われるべき目標は、船舶だけではなく、例えば、飛翔体、車、人(動物)等のような非分布目標であるならば、如何なるものであってもよい。
【0096】
さらに、本発明が適用されたレーダ装置は、船舶だけではなく、航空機、飛翔体、車両(自動車を含む。)、所定のサイト(レードームや舎屋等の有無を問わない。)の何れに搭載され、あるいは配置されてもよい。
【0097】
また、本発明がレーダ装置に適用される場合であっても、そのレーダ装置は、互いに近接する目標Tp、Tqが位置し得るレンジにおいて、レンジ方向とスキャン方向との双方もしくは何れか一方における区分に必要な分解能を有するならば、空中線系の回転やビームフォーミングによるスキャンは必ずしも行われなくてもよい。
【0098】
さらに、このようなレーダ装置では、海面反射の除去その他のレーダ信号処理は、所望の精度や応答性で実現されるならば、既述の融合度に適したアルゴリズムに基づく高分解能処理に先行してまたは後続して行われてもよく、もしくは並行して行われてもよい。
【0099】
また、本発明が適用されるレーダ装置では、既述の目標Tp、Tqの位置や予測位置間の距離の識別が目標追尾の処理として行われる場合には、このような目標追尾が行われなくてもよい。
【0100】
さらに、本発明が適用されるレーダ装置では、既述の高度アルゴリズムあるいは簡易アルゴリズムに基づく高分解能処理の下で、近接した目標Tp、Tqの区分が実現されるならば、必ずしも指示装置が備えられなくてもよく、このような指示装置が備えられる場合であっても、如何なる指示方式が適用されてもよい。
【0101】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0102】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」、「課題を解決するための手段」および「発明の効果」の欄の記載に準じた様式により列記する。
【0103】
[請求項6] 請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記特定のアルゴリズムに基づく処理を反復する
ことを特徴とする指示支援装置。
【0104】
このような構成の指示支援装置では、請求項2に記載の指示支援装置において、前記適応処理手段は、前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記特定のアルゴリズムに基づく処理を反復する。
【0105】
すなわち、特定のアルゴリズムに基づく処理が反復される回数は、上記複数mの目標が区分される可能性が所望の値となる既定の回数に抑えられる。
【0106】
したがって、近接する複数の目標を区分するために要する処理量には、上記可能性が所望の値となる既定の回数として歯止めが設定される。
【0107】
[請求項7] 請求項1ないし請求項6の何れか1項に記載の指示支援装置において、
前記適応処理手段は、
前記可能性が高いほど、前記反射波または前記画像に前記簡易アルゴリズムに基づく処理を優先して施す
ことを特徴とする指示支援装置。
【0108】
このような構成の指示支援装置では、請求項1ないし請求項6の何れか1項に記載の指示支援装置において、前記適応処理手段は、前記可能性が高いほど、前記反射波または前記画像に前記簡易アルゴリズムに基づく処理を優先して施す。
【0109】
すなわち、複数の目標の区分のために簡易アルゴリズムが適用される比率は、これらの複数の目標の区分が容易であるほど、高くなる。
【0110】
したがって、複数の目標が近接する形態に応じて簡易アルゴリズムの適用の頻度が適正化され、これらの複数の区分のために簡易アルゴリズム以外のアルゴリズムが適用されることによる処理量の増加の回避が図られる。
[請求項8] 請求項1ないし請求項7の何れか1項に記載の指示支援装置において、
適応処理手段は、
前記複数mの目標の区分が達成されないときに、その旨を示す情報を生成する
ことを特徴とする指示支援装置。
【0111】
このような構成の指示支援装置では、請求項1ないし請求項7の何れか1項に記載の指示支援装置において、適応処理手段は、前記複数mの目標の区分が達成されないときに、その旨を示す情報を生成する。
【0112】
すなわち、本発明の適用の下で複数mの目標の区分が実現されない場合には、このような状態が無視されることなく、指示され、あるいは本発明に係る測距系や測位系の操作者に通知される。
【0113】
したがって、本発明に係る測距系や測位系では、ディペンダビリティ、パフォーマビリティおよびサービスアビリティが高められ、かつ高く維持される。
【符号の説明】
【0114】
11,34 画像生成部
31 レーダセンサ
32 A/D変換器
33 記憶部
33s 原画像スタック
33p 特定の記憶領域
【技術分野】
【0001】
本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関する。
【背景技術】
【0002】
レーダ装置等に代表される探知装置では、例えば、時系列の順に行われた複数回のスキャンにより得られた目標の位置や速度等の履歴に基づいて、後続するスキャンによって得られるその目標の位置の推定が行われ、その推定の下で最も確からしい目標の候補を捕捉する追尾の処理が行われる。
【0003】
このような追尾は、その追尾の対象となる目標が他の目標に対して十分に離れている場合、および個々の目標から到来した反射に付帯する不要波が少ない場合には、比較的安定にかつ精度よく実現される。
【0004】
しかし、例えば、多数の目標が密集している航路上などでは、一般に、複数の目標(レーダ装置が搭載された船舶を含む。)が接近する場面が往々にして発生する。
【0005】
例えば、2つの目標は、上記探知装置の距離や方位にかかわる分解能の限界(複数の目標をそれぞれ固有に識別できる最小の間隔、方位角、仰角の最小の差)を超える程度にまで近接する状態では、追尾ゲート内では1個の目標として観測され、さらに、このような状態から脱却した状態では、次のような事象(以下、「乗り移り現象」という。)が発生し得る。
【0006】
(1) 上記2つの目標に付与されていた固有のID情報と、これらの2つの目標の位置や速度の履歴がお互いに入れ替わる。
(2) このようにして位置や速度の履歴が入れ替わった後に、上記2つの目標の片方が消失したと誤認識される。
【0007】
さらに、上記「乗り移り現象」は、目標同士だけではなく、例えば、目標とその目標の周辺に位置するクラッタとの間でも発生し得る。
【0008】
従来、上述した環境や背景の下でも追尾の精度や信頼性を高く確保する技術としては、例えば、以下に示す指示支援装置があった。
図3は、従来の指示支援装置の構成例を示す図である。
図3に示す指示支援装置は、以下の要素から構成される。
【0009】
(1) 図示しない空中線に目標から到来した反射波に所定の処理を施すレーダセンサ31
(2) その処理の下で生成されたレーダ信号が入力されるA/D変換器32
(3) A/D変換器32の出力に接続された第一の書き込みポートと、図示されない指示装置に接続された第一の読み出しポートとを有する記憶部33
(4) 記憶部33の第二の読み出しポートと第二の書き込みポートとに接続された画像生成部34
【0010】
図4は、従来の指示支援装置の動作フローチャートである。
以下、図3および図4を参照して従来の指示支援装置の動作を説明する。
A/D変換器32は、上記レーダ信号をディジタル信号に変換することによりディジタルレーダ信号を生成し、記憶部33の所定の記憶領域にスキャン毎に対応する面の集合として配置された原画像スタック33sに、そのディジタルレーダ信号をサイクリックに書き込み、かつ蓄積する。
【0011】
画像生成部34は、上記原画スタック33sに時系列(レンジおよびスキャン)の順に蓄積されたディジタルレーダ信号の列に以下の処理(1)〜(5)をスイープ周期で施す。
【0012】
(1) ディジタルレーダ信号の列に所定のレーダ信号処理(クラッタの除去、所望の目標の追尾等を実現する処理を含む。)を施すことにより、画像情報(以下、「指示対象画像情報」という。)を生成する(図4ステップS1)。
【0013】
(2) 上記ディジタルレーダ信号で示される目標T1〜Tn(n≧1)およびこれらの目標T1〜Tnの位置(例えば、方位角および距離の組み合わせとして与えられる。)を識別する(図4ステップS2)。
【0014】
(3) 上記レーダ信号処理の過程で行われる所望の目標の追尾の下で行われ、かつ目標T1〜Tnに、相対的な距離が所定の下限値を下回る程度に接近した目標Tp、Tq(1≦p≦n,1≦q≦n,p≠q)があるか否かの判別を行う(図4ステップS3)。
【0015】
(4) このような接近した目標Tp、Tq(1≦p≦n,1≦q≦n,p≠q)がある場合には、以下の処理(4-1)〜(4-5)を行う。
【0016】
(4-1) ディジタルレーダ信号に所定の高分解能処理を施すことにより、画像情報(以下、「中間画像情報」という。)を生成する(図4ステップS4)。
【0017】
(4-2) さらに、例えば、上記中間画像情報の画素毎の濃度または階調値の列を2値化し、その2値化の結果で示される見かけ上の目標の数Nを求める(図4ステップS5)。
【0018】
(4-3) 上記指示対象画像情報に実績として含まれていた目標の総数Nt(例えば、既述の追尾の下で識別される。)を求める(図4ステップS6)
【0019】
(4-3) 上記見かけ上の目標の数Nが上記総数Ntに等しいか否か判別する(図4ステップS7)。
(4-4) 目標の数Nが上記総数Ntに等しくない場合には、その旨を示す情報(文字、記号その他の如何なる表示属性で示されてもよい。)が上記中間画像情報に付加されてなる画像情報で上記指示対象画像情報を代替する(図4ステップS8)。
【0020】
(4-5) 目標の数Nが上記総数Ntに等しい場合には、上記中間画像情報で上記指示対象画像情報を代替する(図4ステップS9)。なお、以下では、上記(4-2)〜(4-5)項に記載された処理(図4ステップS5〜S9)については、「目標数判定適応処理」と称する。
【0021】
(5) 記憶部33の記憶領域に既述の原画像スタック33sとは別に配置された特定の記憶領域33pに、既述の手順に基づいて生成された指示対象画像情報を保持する(図4ステップS10)。
【0022】
このようにして特定の記憶領域33pに保持された指示対象画像情報は、例えば、スイープ周期毎に既述の指示装置に引き渡され、所定の指示方式で(例えば、PPI(Plan Position Indicator)スコープとして)指示される。
【0023】
したがって、相対距離が既述の下限値を下回る程度に接近した目標Tp、Tqは、上記高分解能処理による区分が可能である限り、個別の目標として指示画面上に出力される。
なお、本発明に関連性がある先行技術としては、以下に列記する特許文献1ないし特許文献5および非特許文献1がある。
【0024】
(1) 「目標位置検出部において、目標エコー検出部は目標とする船舶のエコー信号を検出し、目標位置推定部において、目標船舶の過去の位置から次スキャンにおける目標位置の推定値と分散を算出し、目標大きさ推定部は、目標船舶の過去の面積から次スキャンにおける目標面積の推定値と分散を算出し、さらに、これら目標位置の推定値とその分散および目標面積の推定値とその分散から目標の確からしさ算出部において、目標の確からしさを算出し、この目標の確からしさに基づいて、目標の最新の推定位置を算出する」ことによって、「目標の識別精度、追尾精度が向上する」点に特徴がある船舶用衝突予防援助装置…特許文献1
【0025】
(2) 「レーダアンテナからの受信データを入力し、該受信データにより決定する映像の実測位置と前回の映像の追尾情報に基づいて、次回の位置を予測する物標追尾装置において、前記受信データを所定時間毎に読み、該読込みに伴って、受信データが複数のときは、その複数の受信データを識別映像データとして抽出する識別映像抽出手段と、前記識別映像データを入力して記憶し、該識別映像データに含まれる映像をそれぞれ分離映像とし、該分離映像毎に、その中心位置、面積、距離間隔を求め、これらを分離映像の特徴として出力する分離映像特徴算出手段と、前記分離映像の特徴が算出される毎に、その分離映像の前記特徴に基づいて、両分離映像が接するまで拡大させ、該拡大映像を両分離映像が結合している1物標の結合映像面積として推定する結合映像推定手段と、前記結合映像面積が算出される毎に、その結合映像面積と両分離映像の面積の和との面積比率と前記距離間隔と両分離映像の半径の長さとの比率との積に基づいて前記拡大倍率を求め、この拡大倍率に基づいて、前記分離映像が1物標毎に対応するか又は1物標による結合映像かどうかを判定し、この判断結果を前記追尾部に知らせる映像分離・結合判定手段とを有する」ことにより、「複数の映像が発生したときは、本当に複数の船舶があって複数映像になっているか又は1つの船舶によって複数の映像が発生したのかを容易に判定し、追尾誤りを発生させない」点に特徴がある物標追尾装置…特許文献2
【0026】
(3) 「情報を処理する処理装置と、重複判定装置と、分離判定装置と、追尾装置とを有し、
上記重複判定装置は、上記処理装置を用いて、観測された目標の位置を表わす目標位置情報に基づいて、追尾中の目標を含む複数の目標が重なって一つの目標として観測されたか否かを判定し、上記分離判定装置は、上記処理装置を用いて、上記複数の目標が重なって一つの目標として観測されたと上記重複判定装置が判定した場合に、上記目標位置情報に基づいて、重なった複数の目標が離れて再び複数の目標として観測されたか否かを判定し、上記追尾装置は、上記処理装置を用いて、上記重なった複数の目標が離れて再び複数の目標として観測されたと上記分離判定装置が判定した場合に、上記重なった複数の目標が離れて観測された複数の目標のうちのいずれかの目標を、上記追尾中の目標として追尾する」ことにより、「複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる」点に特徴がある画像処理装置…特許文献3
【0027】
(4) 「原画像データに対し、反復法によりデコンボリューション処理を行うデコンボリューション処理部と、各反復演算ステップにおける演算結果に対して、原画像データに基づいて生成されたマスクデータに基づいてマスク処理を行い、虚像の発生を抑制するマスク処理部と、ゲイン補正部42においてデコンボリューション処理された画像データのゲインを補正し、境界補正部43において目標境界近傍において生じた虚像を除去する」ことにより、「画像取得装置における分解能が向上する」点に特徴があるデコンボリューション処理装置…特許文献4
【0028】
(5) 「劣化画像を復元して理想画像を近似した画像を生成する画像処理装置であって、前記劣化画像の画素値を初期値として用いた復元画像の各画素値を反復計算により更新することにより前記劣化画像を復元する反復復元部と、前記復元画像の各画素の近傍領域における画素値の分散を推定する画像分散推定部と、前記復元画像の各画素の近傍領域におけるノイズの分散を推定するノイズ分散推定部と、前記復元画像の各画素について前記画素値の分散と前記ノイズの分散の差分を評価し、前記差分の評価にもとづいて前記反復計算により前記復元画像の各画素値を更新するか否かを判定する更新判定部とを含む」ことにより、「高い精度で劣化画像を復元する」点に特徴がある画像処理装置…特許文献5
【先行技術文献】
【特許文献】
【0029】
【特許文献1】特開2000−298169号公報
【特許文献2】特開平7−191134号公報
【特許文献3】特開2009−109293号公報
【特許文献4】特開2002−008004号公報
【特許文献5】特開2007−299068号公報
【非特許文献】
【0030】
【非特許文献1】南茂夫、河田聡著「科学計測のためのデータ処理入門」CQ出版社2001
【発明の概要】
【発明が解決しようとする課題】
【0031】
ところで、上述した従来例では、近接した目標Tp、Tqの区分は、反復アルゴリズムであって、反復の回数が予め所定の値に設定される高分解能アルゴリズム、もしくは反復の回数が所定の範囲で可変された高分解能アルゴリズムに基づいて実現されていた。
また、このような高分解能アルゴリズムは、一般に、区分がなされるべき目標の数が多いほど、高度かつ複雑となる場合が多かった。
【0032】
すなわち、これらの目標Tp、Tqの相対的な距離が比較的大きい場合、あるいは両者の相対的な配置関係が上記区分が比較的容易に実現可能な形態である場合には、既述の反復リゴリズムに基づいて処理が反復されるべき回数が多かった。
【0033】
また、レーダセンサ31に目標Tp、Tqから到来する反射波のレベルの時間軸上における尖頭値の間隔τは、一般に、そのレーダセンサ31の空中線系の主ローブの幅より小さく、この空中線系より放射された送信波のパルス幅より小さい。
【0034】
しかし、これらの目標Tp、Tqから到来する反射波のレベルの時間軸上における分布については、図5(a),(b)にそれぞれ示すように、レンジ(距離)方向とスキャン(方位角)方向との何れにおいても、くぼみが形成される場合(以下、「ケースA」という。)と、反対に形成されない場合(以下、「ケースB」という。)とがある。
【0035】
しかも、反復アルゴリズムに基づいて処理が反復されるべき回数には、上記ケースBでは、上記ケースAに比べて数十倍にも亘る格差があるにもかかわらず、上記反復アリゴリズムに基づいて処理が反復されるべき回数が1通りしかなかった。
したがって、画像生成部34に過度の処理量が要求され、あるいは応答性や実時間性が低下したり損なわれる可能性があった。
【0036】
本発明は、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できる指示支援装置を提供することを目的とする。
【課題を解決するための手段】
【0037】
請求項1に記載の発明では、判別手段は、到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する。適応処理手段は、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する。
【0038】
すなわち、上記反射波または画像で示される複数mの目標が個別に区分できる可能性が既述の閾値を超える程度に高い場合には、高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づく処理により、これらの目標の区分が図られる。
【0039】
請求項2に記載の発明では、判別手段は、到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する。適応処理手段は、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムと、簡易アルゴリズムより所要する処理量が多い特定のアルゴリズムまたは前記高分解能アリゴリズムとに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する。
【0040】
すなわち、上記反射波または画像で示される複数mの目標が個別に区分できる可能性が既述の閾値を超える程度に高い場合には、高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づく処理が優先的に行われ、かつ高分解能アルゴリズムに基づく処理に要する処理量が少なく抑えられることにより、これらの目標の区分が図られる。
【0041】
請求項3に記載の発明では、請求項1または請求項2に記載の指示支援装置において、前記適応処理手段は、前記高分解能アルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る。
【0042】
すなわち、高分解能アルゴリズムに基づく処理が反復される回数は、上記複数mの目標の区分が達成される最小の回数に抑えられる。
【0043】
請求項4に記載の発明では、請求項1または請求項2に記載の指示支援装置において、前記適応処理手段は、前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記高分解能アルゴリズムに基づく処理を反復する。
【0044】
すなわち、高分解能アルゴリズムに基づく処理が反復される回数は、上記複数mの目標が区分される可能性が所望の値となる既定の回数に抑えられる。
【0045】
請求項5に記載の発明では、請求項2に記載の指示支援装置において、前記適応処理手段は、前記特定のアルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る。
すなわち、特定のアルゴリズムに基づく処理が反復される回数は、上記複数mの目標の区分が達成される最小の回数に抑えられる。
【発明の効果】
【0046】
本発明によれば、近接した複数の目標の区分は、その区分のために行われるべき処理の処理量が平均的に少なく抑えられるにもかかわらず、確度高く実現される。
【0047】
また、本発明では、複数の目標が近接する形態に対する柔軟な適応が図られ、これらの目標の区分に要する処理量が低く抑えられる。
【0048】
したがって、本発明が適用された測位系や測距系では、構成の複雑化やコストの増加を伴うことなく、応答性および総合的な性能が向上し、かつ余剰の処理量が多様に活用されることにより付加価値と総合的な信頼とが高められる。
【図面の簡単な説明】
【0049】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の動作フローチャート図である。
【図3】従来の指示支援装置の構成例を示す図である。
【図4】従来の指示支援装置の動作フローチャートである。
【図5】従来例の課題を説明する図である。
【発明を実施するための形態】
【0050】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、図3に示す従来例と機能および構成が同じ要素については、同じ符号を付与し、ここではその詳細な説明を省略する。
【0051】
本実施形態と図3に示す従来例との構成の相違点は、画像生成部34に代えて画像生成部11が備えられた点にある。
図2は、本実施形態の動作フローチャートである。
以下、図1および図2を参照して本実施形態の動作を説明する。
【0052】
本発明の特徴は、本実施形態では、画像生成部11によって行われる下記の処理の手順にある。なお、以下では、図3に示す従来例と同様にして行われる処理については、図2の対応する処理に図4に示されたステップ番号と同じステップ番号を付与し、ここでは、詳細な説明を省略する。
画像生成部34は、上記原画スタック33sに時系列(レンジおよびスキャン)の順に蓄積されたディジタルレーダ信号の列に以下の処理(1)〜(6)をスイープ周期で施す。
【0053】
(1) ディジタルレーダ信号の列に所定のレーダ信号処理(クラッタの除去、所望の目標の追尾等を実現する処理を含む。)を施すことにより、画像情報(以下、「指示対象画像情報」という。)を生成し(図2ステップS1)、上記ディジタルレーダ信号の列で示される目標T1〜Tn(n≧1)およびこれらの目標T1〜Tnの位置(例えば、方位角および距離の組み合わせとして与えられる。)を識別する(図2ステップS2)。
【0054】
(2) 目標T1〜Tnに、上記レーダ信号処理の過程で行われる所望の目標の追尾の下で行われ、かつ相対距離が所定の下限値を下回る程度に接近した目標Tp、Tq(1≦p≦n,1≦q≦n,p≠q)があるか否かの判別を行う(図2ステップS3)。
【0055】
(4) このような接近した目標Tp、Tqがある場合には、以下の処理(4-1)〜(4-3)を行う。
【0056】
(4-1) 指示対象画像上で一体化されて表示される目標Tp、Tqの外形を識別し、その外形にくびれやくぼみ(以下、「鞍部」という。)があるか否かを判別する(図2ステップS20)。
(4-2) このような鞍部がない場合には、上記ディジタルレーダ信号に所定のアルゴリズム(以下、「高度アルゴリズム」という。)が適用された高分解能処理(従来例に適用された高分解能処理であってもよい。)を施すことにより、画像情報を生成し(図2ステップS21)、さらに、従来例と同様の「目標数判定適応処理」を行うことによって得られた画像情報で既述の指示対象画像情報を代替する(図2ステップS22)。
【0057】
(4-3) 反対に、上記鞍部がある場合には、上記高度アルゴリズムに比べて所要する処理量が少なく、かつ所望の精度や確度で上記目標Tp、Tqの区分を実現可能なアルゴリズム(以下、「簡易アルゴリズム」という。)が適用された高分解能処理を既述のディジタルレーダ信号に施すことにより、画像情報を生成し(図2ステップS23)、さらに、従来例と同様の「目標数判定適応処理」を行うことによって得られた画像情報で既述の指示対象画像情報を代替する(図2ステップS24)。
【0058】
(5) 既述の通りに記憶部33の記憶領域に配置された特定の記憶領域33pに、上記手順に基づいて生成された指示対象画像情報を保持する(図2ステップS10)。
【0059】
このようにして特定の記憶領域33pに保持された指示対象画像情報は、スイープ周期で既述の指示装置に引き渡され、所定の指示方式に基づくスコープとして表示される。
【0060】
すなわち、本発明によれば、相対距離が既述の下限値を下回る程度に接近した目標Tp、Tqの区分のために行われる高分解能処理のアルゴリズムは、高度アルゴリズムだけではなく、これらの目標Tp、Tqの相対的な距離や位置、目標Tp、Tqを結ぶ線のレンジ方向やスキャン方向に対する傾斜等に応じて選択され、かつ所要する処理量が高度アルゴリズムに比べて少ない簡易アルゴリズムに設定される。
【0061】
このように本発明が適用されたレーダ装置では、目標T1〜Tnの多様な移動や位置に柔軟に適応して、これらの目標T1〜Tnの指示に要する処理量が平均的に低く抑えられ、かつその指示の精度および応答性が向上する。
【0062】
さらに、本発明が適用されたレーダ装置では、目標の追尾が行われる場合であっても、その追尾の対象となる目標の消失と、指示画面上における不自然な表示とが極力回避され、性能、信頼性および価格性能比が総合的に高められる。
【0063】
なお、本実施形態では、既述の高度アルゴリズムとしては、例えば、最大エントロピー法
(Maximum
Entropy Method)、Richardson-Lucy法、最尤法(Maximum Likelihood)、EM(Expectation-maximization)法、Map法(Maximum
A-Posteriori)等の適用が可能である。
【0064】
また、本実施形態では、既述の簡易アルゴリズムとしては、例えば、正規化付き共役勾配法、勾配投影法、あるいは既述の特許文献4(特開2002−008004号公報)に開示されるデコンボリューション処理装置のように、計算コストが軽い「拘束付き最小自乗規範」等の適用が可能である。
【0065】
さらに、本実施形態では、高度アルゴリズムと簡易アルゴリズムとの何れに基づく高分解能処理も、2次元あるいは3次元の方向に一括して行われなくてもよく、例えば、距離方向と角度方向とのそれぞれに関する1次元方向の処理が所望の順序で直列に行われてもよい。なお、近接する目標Tp、Tqから個別に到来する反射波のレベルの最大点を結ぶ直線Lと、距離(レンジ)方向あるいは方位角や仰角(スキャン)方向を示す軸との交叉角が大きい場合には、上記高分解能処理は、それぞれ方位角や仰角(スキャン)方向または距離(レンジ)方向における一次元の処理として行われてもよい。
【0066】
また、本実施形態では、例えば、既述の鞍部の有無の判定の基準のように、目標Tp、Tqが近接している程度や形態に応じたこれらの目標Tp、Tqの区分の可否や難易度を示す融合度は、例えば、以下に列記する融合度(1)〜(11)(所望の精度による近似を含む。)の何れであってもよい。
【0067】
(1) 目標Tp、Tqが近接していない状態においてこれらの目標Tp、Tqをそれぞれ示す画像の面積(例えば、画素の数として与えられる。)S1,S2がほぼ一定であることを前提とし、目標Tp、Tqが近接した状態でこれらの目標Tp、Tqを含む見かけ上の1つの画像の面積S3(例えば、画素の数として与えられ、目標Tp、Tqが著しく近接した状態では、(S1+S2)未満となる。)と、該当するレーダ装置の分解能に基づいて予め設定される閾値Sthとの差(または比)として与えられる融合度
【0068】
(2) 互いに近接した目標Tp、Tqを示す1つの画像の面積(例えば、画素の数として与えられる。)Sと、その画像の外周の長さ(例えば、画素の間隔で正規化されて与えられる。)Lとの比(=S/L)と、規定の閾値(上記面積Sと長さLとの双方もしくは何れか一方に対して算定されあるいは予め設定されてもよい。)との差または比(該当する画像の真円度を示す。)として与えられる融合度
【0069】
(3) データベース等として予め登録され、かつ互いに近接した複数の目標を示すと共に個別に既述の融合度に対応付けられた1つの画像のパターンの内、互いに近接した目標Tp、Tqを実際に含む画像に最も高い精度で整合する特定のパターンに予め対応付けられた融合度
【0070】
(4) 近接した目標Tp、Tqを示す1つの画像(これらの目標Tp、Tqが含まれる画像の部位の内側が切り出されることによって、独立な像や目標と誤認識されることの回避が図られてもよい。)の濃度、階調値(もしくは、その画像を示すレーダ信号の振幅)の分布として与えられる融合度
【0071】
(5) 目標Tp、Tqが近接する前に開始された追尾の下で予測されたこれらの目標Tp、Tqの距離dと、レーダの分解能に基づいて予め設定された閾値dthとの比または差として与えられる融合度
【0072】
(6) AIS(Automatic Identification System)によって与えられる目標Tp、Tqの位置Pp、Pq(AISによって更新される頻度が低い場合には、予測や追尾の下で補完されてもよい。)の差として上記距離dが算出される点を除いて上記(5) 項と同様に与えられる融合度
【0073】
(7) 目標Tp、Tqの視線の後方に位置する目標(陸、島、大型の船舶、海底、温度躍層等)から到来する反射波(海面反射に代表される不要波であってもよい。)のレベルの低下分に基づいて換算される融合度
【0074】
(8) 操作者が目標Tp、Tqの距離や上記レベルの低下分を目視する(レーダ装置等の)操作者によって設定される融合度
【0075】
(9) 自船と他船、または他船同士の衝突の危険性を示す警報(異なるレーダとの連係等によって与えられてもよい。)の有無として与えられる融合度
【0076】
(10)航行の安全等を目的として何らかの通信路を介して引き渡される情報の監視や解析の下で識別される融合度
【0077】
(11)規定の回数に亘って探索目的の前処理として高分解能処理を反復し、その高分解能処理の反復の過程における収束の速度、または誤差の大きさとして評価される融合度
【0078】
また、本発明は、既述のレーダ装置だけではなく、例えば、電波に代えてレーザ光等が適用された光学的なレーダ装置、あるいはカメラ等の光学機器にも同様に適用可能であり、これらのレーダ装置や光学機器では、上述した融合度は、以下に列記する融合度(1)〜(3)の何れで代替されてもよい。
【0079】
(1) 近接した目標Tp、Tq間に生じる光学的な写し込み、反射、遮蔽等に起因する色合い(明度や彩度を含む。)の変化として評価される融合度
【0080】
(2) 近接した目標Tp、Tqと、これらの目標Tp、Tqの双方もしくは何れか一方の影と間に生じる光学的な写し込み、反射等に起因する色合い(明度や彩度を含む。)の変化として評価される融合度
【0081】
(3) 目標Tp、Tqの近接に応じた「これらの目標Tp、Tqの間の色合い(明度や彩度を含む。)、大気の速度場、温度、圧力などの物理的な変化」として評価される融合度
【0082】
さらに、上述した多様な融合度は、例えば、以下に列記するように、互いに連係する複数の異なる装置の如何なる機能分散や負荷分散の下で求められ、かつ適用されてもよい。
【0083】
(1) カメラ等のレーダ以外の光学機器によって求められた融合度がレーダ装置に引き渡されて適用される。
(2) 互いに連係する一方のレーダ装置によって求められた融合度が他方のレーダ装置に引き渡されて適用される。
【0084】
また、既述の鞍部の有無の判定の対象は、画像処理ではなくレーダ信号処理の下で識別されるべき複数次元の目標であってもよい。
【0085】
さらに、本実施形態では、上記目標T1〜Tnの内、相対距離が既述の下限値を下回る程度に接近し、あるいは接近し得る目標の特定および数は、追尾処理の下で識別されなくてもよく、例えば、指示画面を目視する操作者によって直接識別(設定)され、あるいはAIS等の航行支援装置との連係の下で識別されてもよい。
【0086】
また、本実施形態では、高度アルゴリズムや簡易アルゴリズムに基づいて高分解能処理が施されるべき領域は、上記目標Tp、Tqおよびその周囲等のような追尾ゲート内に限定されず、例えば、本発明が適用されたレーダ装置の操作部を介して操作者によって指定され、またはそのレーダ装置に搭載された制御系の主導の下で自動的にもしくは半自動的に設定されてもよい。
【0087】
さらに、本実施形態では、上記相対距離が既述の下限値を下回る程度に接近し、あるいは接近し得る目標の数は、「2」に限定されず、例えば、「3」以上である場合には、該当する3つ以上の目標の内、2つずつに関して既述の処理が行われ、あるいはこれらの3つの目標の全てに関して既述の処理が一括して行われてもよい。
【0088】
また、本実施形態では、既述の簡易アルゴリズムに基づく高分解能処理の結果から識別される目標の数Nと、追尾処理等の下で識別される目標の総数Ntとが一致しないときには、例えば、その高分解能処理に続いて、その簡易アルゴリズムより所要する処理量が多くても目標の区分をより精度よく実現可能なアルゴリズム(以下、「代替アルゴリズム」という。既述の高度アルゴリズムであってもよい。)に基づく高分解能処理が施されてもよい。
【0089】
さらに、このような代替アルゴリズムに基づく高分解能処理は、所定の処理の反復処理である場合には、上記目標の総数Ntと数Nとが一致する時点で後続する反復処理が打ち切られることにより、無用な処理量の増加が回避されてもよい。
【0090】
また、上記目標の数Nについては、例えば、既述のディジタルレーダ信号の振幅の下で識別可能であるが、その他の如何なる処理により識別されてもよい。
【0091】
さらに、上記反復の回数に上限値が設定され、その上限値に等しい回数に亘って反復処理が行われても、上記目標の総数Ntと数Nとが一致しない場合には、例えば、従来例と同様に、その旨を示す情報(文字、記号その他の如何なる表示属性で示されてもよい。)が指示対象画像情報に付加されて所定の指示方式に基づいて表示され、あるいは視覚情報や音響情報等として出力されてもよい。
【0092】
また、本発明は、融合度の算出と、その融合度に応じて高度アルゴリズムまたは簡易アルゴリズムに基づいて行われる高分解能処理とは、指示装置の画面に表示されるPPIスコープ等の画像情報を生成する画像処理として実現されている。
【0093】
しかし、このような融合度の算出と高分解能処理との双方もしくは何れか一方は、MTIや海面反射除去と同様にレーダ信号処理の過程で行われてもよい。
【0094】
さらに、本発明は、レーダ装置に限定されず、例えば、魚群探知機、ソナー、光学カメラ(赤外線カメラを含む。)、レンジファインダ、合成開口レーダ、天体望遠鏡、温度センサにも同様に適用可能である。
【0095】
また、このように本発明が適用されるレーダ装置等によって測位や測距が行われるべき目標は、船舶だけではなく、例えば、飛翔体、車、人(動物)等のような非分布目標であるならば、如何なるものであってもよい。
【0096】
さらに、本発明が適用されたレーダ装置は、船舶だけではなく、航空機、飛翔体、車両(自動車を含む。)、所定のサイト(レードームや舎屋等の有無を問わない。)の何れに搭載され、あるいは配置されてもよい。
【0097】
また、本発明がレーダ装置に適用される場合であっても、そのレーダ装置は、互いに近接する目標Tp、Tqが位置し得るレンジにおいて、レンジ方向とスキャン方向との双方もしくは何れか一方における区分に必要な分解能を有するならば、空中線系の回転やビームフォーミングによるスキャンは必ずしも行われなくてもよい。
【0098】
さらに、このようなレーダ装置では、海面反射の除去その他のレーダ信号処理は、所望の精度や応答性で実現されるならば、既述の融合度に適したアルゴリズムに基づく高分解能処理に先行してまたは後続して行われてもよく、もしくは並行して行われてもよい。
【0099】
また、本発明が適用されるレーダ装置では、既述の目標Tp、Tqの位置や予測位置間の距離の識別が目標追尾の処理として行われる場合には、このような目標追尾が行われなくてもよい。
【0100】
さらに、本発明が適用されるレーダ装置では、既述の高度アルゴリズムあるいは簡易アルゴリズムに基づく高分解能処理の下で、近接した目標Tp、Tqの区分が実現されるならば、必ずしも指示装置が備えられなくてもよく、このような指示装置が備えられる場合であっても、如何なる指示方式が適用されてもよい。
【0101】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0102】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」、「課題を解決するための手段」および「発明の効果」の欄の記載に準じた様式により列記する。
【0103】
[請求項6] 請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記特定のアルゴリズムに基づく処理を反復する
ことを特徴とする指示支援装置。
【0104】
このような構成の指示支援装置では、請求項2に記載の指示支援装置において、前記適応処理手段は、前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記特定のアルゴリズムに基づく処理を反復する。
【0105】
すなわち、特定のアルゴリズムに基づく処理が反復される回数は、上記複数mの目標が区分される可能性が所望の値となる既定の回数に抑えられる。
【0106】
したがって、近接する複数の目標を区分するために要する処理量には、上記可能性が所望の値となる既定の回数として歯止めが設定される。
【0107】
[請求項7] 請求項1ないし請求項6の何れか1項に記載の指示支援装置において、
前記適応処理手段は、
前記可能性が高いほど、前記反射波または前記画像に前記簡易アルゴリズムに基づく処理を優先して施す
ことを特徴とする指示支援装置。
【0108】
このような構成の指示支援装置では、請求項1ないし請求項6の何れか1項に記載の指示支援装置において、前記適応処理手段は、前記可能性が高いほど、前記反射波または前記画像に前記簡易アルゴリズムに基づく処理を優先して施す。
【0109】
すなわち、複数の目標の区分のために簡易アルゴリズムが適用される比率は、これらの複数の目標の区分が容易であるほど、高くなる。
【0110】
したがって、複数の目標が近接する形態に応じて簡易アルゴリズムの適用の頻度が適正化され、これらの複数の区分のために簡易アルゴリズム以外のアルゴリズムが適用されることによる処理量の増加の回避が図られる。
[請求項8] 請求項1ないし請求項7の何れか1項に記載の指示支援装置において、
適応処理手段は、
前記複数mの目標の区分が達成されないときに、その旨を示す情報を生成する
ことを特徴とする指示支援装置。
【0111】
このような構成の指示支援装置では、請求項1ないし請求項7の何れか1項に記載の指示支援装置において、適応処理手段は、前記複数mの目標の区分が達成されないときに、その旨を示す情報を生成する。
【0112】
すなわち、本発明の適用の下で複数mの目標の区分が実現されない場合には、このような状態が無視されることなく、指示され、あるいは本発明に係る測距系や測位系の操作者に通知される。
【0113】
したがって、本発明に係る測距系や測位系では、ディペンダビリティ、パフォーマビリティおよびサービスアビリティが高められ、かつ高く維持される。
【符号の説明】
【0114】
11,34 画像生成部
31 レーダセンサ
32 A/D変換器
33 記憶部
33s 原画像スタック
33p 特定の記憶領域
【特許請求の範囲】
【請求項1】
到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、
前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段と
を備えたことを特徴とする指示支援装置。
【請求項2】
到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、
前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムと、簡易アルゴリズムより所要する処理量が多い特定のアルゴリズムまたは前記高分解能アリゴリズムとに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段と
を備えたことを特徴とする指示支援装置。
【請求項3】
請求項1または請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記高分解能アルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る
ことを特徴とする指示支援装置。
【請求項4】
請求項1または請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記高分解能アルゴリズムに基づく処理を反復する
ことを特徴とする指示支援装置。
【請求項5】
請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記特定のアルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る
ことを特徴とする指示支援装置。
【請求項1】
到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、
前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段と
を備えたことを特徴とする指示支援装置。
【請求項2】
到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、
前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムと、簡易アルゴリズムより所要する処理量が多い特定のアルゴリズムまたは前記高分解能アリゴリズムとに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段と
を備えたことを特徴とする指示支援装置。
【請求項3】
請求項1または請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記高分解能アルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る
ことを特徴とする指示支援装置。
【請求項4】
請求項1または請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記複数mの目標が区分される可能性が所望の値となる既定の回数に亘って、前記高分解能アルゴリズムに基づく処理を反復する
ことを特徴とする指示支援装置。
【請求項5】
請求項2に記載の指示支援装置において、
前記適応処理手段は、
前記特定のアルゴリズムに基づく処理の反復の過程で区分された目標の数n(1≦n≦m)が前記複数mに等しくなったときに、前記反復を打ち切る
ことを特徴とする指示支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−225868(P2012−225868A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−95956(P2011−95956)
【出願日】平成23年4月22日(2011.4.22)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月22日(2011.4.22)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]