
指紋特徴抽出装置
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は指紋の照合装置に関し、特に指紋データから照合・位置合わせに利用する特徴を抽出する装置に関する。
【0002】
【従来の技術】与えられた指紋画像対の同一性の判定のための照合の実現としては、例えば登録側(以下F側)指紋と探索側(以下S側)指紋の第1・第2関節を含む指の押捺画像が入力された時にそれらの位置合わせを行った後に照合を行う装置として、特開平3−108075(「パターン画像処理装置」)記載の技術がある。ここでは指紋の一致判定に先だって指紋のX方向及びY方向の位置合わせを行うために、図8に示すように指の長手方向と直交する方向に画素の濃度値を累積加算し、そこから得られた濃度分布をヒストグラムのずらし差の2乗和を最小にするようにずらしマッチングを行うという方法で位置合わせを実行する。
【0003】また、カード形式の押捺指紋印象画像を対象にし、登録指紋の大規模なデータベースの中からより精密な照合により一致指紋を探索するための、マニューシャを利用した一致判定の実現として、特公昭63−13226や特公昭63−34508(いずれも「指紋照合装置」)に記述された技術に基づいたものがある。これを使用して高精度の照合を実現する場合も、F側指紋とS側指紋とのより正確な位置合わせ及び方向合わせが行われる必要がある。
【0004】位置合わせのために指紋画像から安定した指紋中心を検出決定する方法として、特開平1−271883、特開平1−271884(いずれも「指紋中心検出方式」)記載の技術がある。特開平1−271883では指紋隆線の各箇所の隆線方向の曲率からその曲率中心を確率的に求め、特開平1−271884ではさらに隆線のなす上向き凸型曲線の頂上(曲率最大点)の位置発見から指紋の中心を求め、それを用いて位置合わせをする。
【0005】また方向合わせのために指紋画像から安定した指頭軸方向を検出決定する方法として、特願平7−79033(「指紋指頭軸方向検出装置」)記載の技術がある。ここでは指紋周辺部の隆線方向と中心からの放射線方向の角度差が指頭軸方向と相関を持っていることを利用し、指頭軸方向が既知の指紋を用いて内積分布パタンの辞書を作っておくことで、未知の指紋についてその内積を算出と辞書パタン参照により、指頭軸方向を検出している。
【0006】
【発明が解決しようとする課題】前記「パターン画像処理装置」明細書に記載された方法では、まず指紋押捺印象の入力に際して指置き台に指ガイドを設ける等の手段により入力指の方向が一定になることを前提とし、それが実現されているとの仮定の元に、画像から得られる画像情報を指の長手方向と直交する方向にのみ加算している。そのため、指紋押捺が傾いている場合に安定して位置合わせを成功させることが困難になる。例えばF側、S側とも指紋10指カードをスキャナーで読み込んだデータが供給されそれらの照合を行う場合、指の押捺方向はカードごと、指ごとに十分統一されておらず、上の仮定の成立は期待できない。このようなデータでの入力画像の例を図4に示す。このように指の軸が傾いている場合、固定方向(この場合は指の軸と直交する方向なので水平方向)について投影累積加算したヒストグラムのずらしマッチングを使用する方法では安定した位置合わせが実現できない。さらに本方式のように指の値と直交する方向の全幅に渡って投影を求める方法では、押捺の際に指が正しく押捺面にフラットな状態で押捺されなかったなどの理由で指紋印象の一部が欠けている場合に、節線部に対応する投影の位置付近以外でも本来大きくなるべきヒストグラムの値が小さくなるという現象が起こり、節線部付近でのヒストグラムが小さくなることを利用した方法では正しい位置合わせが保証されないという問題がある。
【0007】一方、前記「指紋中心検出方式」・「指紋指頭軸方向検出装置」特許に記載された技術は、指紋の位置・方向、さらには押捺状態・品質が多様な場合にも多くの指紋印象において安定で精度良い動作をし、その結果高い照合精度が実現できることが知られている。しかしこれらでも隆線の曲率を決定づける中心付近の画像品質が不十分な場合には十分正確で安定した位置・方向情報を与えられないことがある。
【0008】本発明の目的は、指紋中心付近の画像品質などの理由でこれらの方式が与える位置情報の精度が不十分な場合にも、これに取って代わりあるいはこれを補完する、より安定した位置合わせ・方向合わせを可能にするための情報を指紋から自動抽出する装置を提供することである。より詳しくは、本発明は、上記のカード形式の押捺指紋印象画像で多くの場合画像に含まれている第1関節線(以下「節線」と呼ぶ)の位置と方向を自動抽出する装置を実現することを目的とする。またその自動抽出の信頼性を表すために、決定された節線位置の確信度を同時に求めることを目的とする。
【0009】
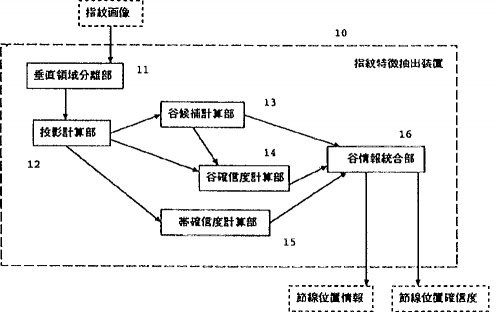
【課題を解決するための手段】本発明の指紋特徴抽出装置は、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、複数の帯での谷候補計算部から得られた谷の位置を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする。
【0010】また本発明の指紋特徴抽出装置は、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、各帯でのそれぞれの谷についてその確信度を計算する谷確信度計算部と、それぞれの帯についてその確信度を計算する帯確信度計算部と、複数の帯での谷候補計算部から得られた谷の位置と谷確信度計算部から得られた谷確信度と帯確信度計算部から得られた帯確信度を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする。
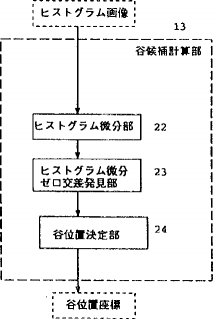
【0011】また本発明の指紋特徴抽出装置は、前記谷候補計算部が、入力された投影ヒストグラムをY方向に微分するヒストグラム微分部と、微分のゼロ交差位置を発見するヒストグラム微分ゼロ交差発見部と、そのゼロ交差についてヒストグラムの谷であるかを判定する谷位置決定部とから構成されることを特徴とする。
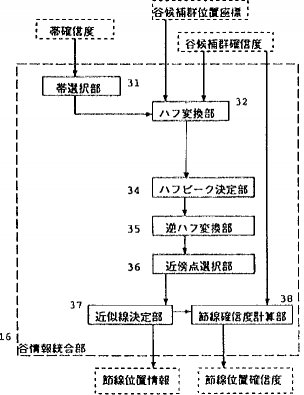
【0012】また本発明の指紋特徴抽出装置は、前記谷情報統合部が、複数の帯での谷候補計算部から得られた谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、ピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする。
【0013】また本発明の指紋特徴抽出装置は、前記谷情報統合部が、前記帯確信度計算部から入力される確信度情報を使って複数の帯のうちいくつかを選択する帯選択部と、前記谷候補計算部から得られた谷群のうち選択された帯上にある谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、決定されたピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする。
【0014】また本発明の指紋特徴抽出装置は、前記ハフ変換部が、通常のハフ変換のように谷候補点1点についてハフ空間の濃度値を1だけインクリメントするかわりに前記谷確信度計算部から得られるその谷の確信度に比例した値だけインクリメントする、ことを特徴とする。
【0015】また本発明の指紋特徴抽出装置は、前記谷情報統合部がさらに、前記逆ハフ変換部で得られた直線の近傍に存在する谷を選択する近傍点選択部と、選択された谷群の位置からそれを近似する線を決定する近似線決定部と、選択された谷の確信度から決定された線の確信度を計算する節線確信度計算部と、から構成されることを特徴とする。
【0016】
【発明の実施の形態】次に本発明について図面を参照して詳細に説明する。
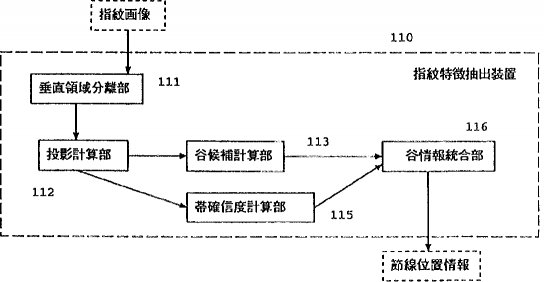
【0017】図1は本発明の指紋特徴抽出装置の一実施例(実施例1とする)の基本構成図、図2・図3はそれぞれその谷候補計算部・谷情報統合部の詳細構成図である。
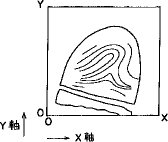
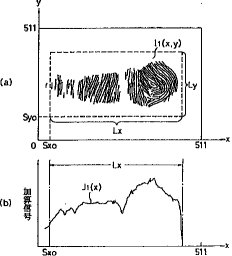
【0018】指紋カード上などの指紋押捺印象がデジタル化された画像が装置に入力される。これらの指紋画像では基本的に押捺は指の軸が正確・一定でなくある程度傾いていることがありながらもほぼ垂直に近い角度になるように押捺されている。図4に押捺枠内の指紋画像の例を示す。水平方向をX軸方向、垂直方向をY軸方向とし、押捺枠内(画素数でX×Yとする)を処理領域と呼ぶ。画像はそれぞれの画素での濃度値によりf(x,y)(0≦x<X,0≦y<Y)と表現される。背景は白でf(x,y)は小さく、押捺されたところは黒領域でf(x,y)の値は大きくなるとする。
【0019】本装置では、関節線を発見するために、「関節線は水平に近い直線状の、ある程度の太さを持つ白領域である」というモデルに基づき、節線の白領域は上下と比較すると局所的に濃度値の小さい領域が水平に近い傾きで直線状に並んでいると考える。これを発見するため、画像を細い垂直状の帯に分け、それぞれの中で水平方向の投影を計算する。
【0020】上記のような指紋画像が入力されると、垂直領域分離部11ではこの処理領域内を、垂直な複数の平行線により、縦方向に細長い互いに隣接する長方形の小領域に分ける。これらのそれぞれを「帯」と呼ぶ。
【0021】投影計算部12では、それぞれの帯について、まず縦(Y)方向のローパスフィルタ(例えば平均化フィルタ)による平滑化を施す。これは一般に隆線による濃度変化は関節の幅より小さいことを利用して、後述のように投影ヒストグラムから低濃度領域を発見する時に、水平方向の隆線の影響が生じるのを防ぐためである。フィルタのウィンドウサイズを2L+1として例えば次のようにして平滑化画像g(x,y)を得る。
【0022】
【数1】

【0023】ついでそれぞれの帯の中で、水平方向の投影を計算する。帯数をNh 、帯の幅をW=X/Nh として、
【0024】
【数2】
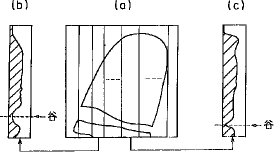
【0025】これらはNh 個の帯ごとの投影ヒストグラムとなる。図5に、処理領域内を平行な帯に分離した様子(a)と、帯において投影ヒストグラムを計算した様子(b)(c)を示す。
【0026】画像の品質が理想的ではなく、かつ節線が傾いていることがあるために、節線部分でも上の投影結果が0になる訳ではないが、局所的に上下の部分よりは濃度が低くなる。谷候補計算部13では、これらから白領域(ヒストグラムの谷)の候補点を探す。
【0027】まず図2のヒストグラム微分部22では、上のヒストグラムhm (y)で上から下へ(yの大きくなる方向へ)スキャンしながらその微分であるヒストグラムの傾き
【0028】
【外1】
【0029】を求める。
【0030】ヒストグラム微分ゼロ交差発見部23では、その正負の変化により1.負の傾きが−ε(定数)より小なら谷の開始、2.傾きが負から0を交差し正に変わった点を谷底、3.一度εを越えてからそれを下回った点を谷の終わり、とするという方法でゼロ交差を発見する(ただしεは小さい正定数)。前処理で平滑化を施してあるため、このような単純な方法で安定して谷候補を発見できる。
【0031】谷位置決定部24では、上で求めた谷候補で深さと幅が一定以上のものを「谷」Pi とし、それらの谷位置座標(xi ,yi )を出力する。そのX座標xi としては帯の水平方向中央のX座標値、Y座標yi としては谷底のY座標値をとる。谷はそれぞれの帯について0個、あるいは複数個あり得る。
【0032】上で求められた谷には、本当の節線を構成する谷の他に、皺、隆線、傷、あるいは画像採取時に薄く入力されたり汚れ、にじみなどささまざまな要因によって生じた局所低濃度領域による偽の谷が多く含まれる。これらの中で正確な選択をするために、谷確信度計算部14では、求められた谷のそれぞれについて、位置、谷の深度、谷の深さと幅の比のファクタから計算される「節線指標」(谷確信度)を与える。いずれのファクタについてもその計算式は多数のサンプルから統計確率的に予め決定しておく。例えば多数の画像について手動で正解の節線位置を与え、同じ谷抽出を行った時に、この節線に対応する谷についての位置、深度、深さと幅の比を求め、この分布のピークに近い値を持つ時に指標が大きくなるように決定する。これにより、それぞれの谷Pi について確信度Ci が決定される。確信度は正の値で、その谷が節線を構成する谷らしいほど、大きな値を持つ。
【0033】また帯確信度計算部15において、それぞれの帯の確信度として、hm (y)のY方向の和
【0034】
【数3】
【0035】を算出する。
【0036】谷情報統合部16では上で求めた情報を入力して、節線位置情報とその確信度である節位置確信度を求める。
【0037】まず図3の帯選択部31では、帯の確信度Dm が閾値より大きい帯を選択する。これは原画像で指領域の外(枠の両横端)から指の端にかけては十分な押捺品質が得られておらず、あるいは指の両脇(処理領域の両端)付近のように帯内に十分な指紋押捺が含まれない帯では十分な濃度情報を持っていないため、そこから得られた谷候補の信頼性も低いと考えられるからである。閾値としては例えば画像全体の濃度平均を使用する。
【0038】帯選択部31で選択された帯上に存在する各谷Pi について、その座標(xi,yi )と確信度Ci をハフ変換部32に入力する。ハフ変換部32では、偽の谷を含むこれらの中から直線状に並んでいると考えられる節線候補を発見するために、ハフ変換により整列した谷候補を探索する。ハフ変換では谷候補Pi (xi ,yi )の各々について写像式
【0039】
【数4】
【0040】で決定される画像H(u,v)(0≦u≦U,0≦v≦V)上の曲線を求め、この曲線の通過する点についてハフ空間uv上でその画素値(予め0で初期化されている)をインクリメントする。通常のハフ変換でのようにハフ空間画像H(u,v)の画素値を1ずつインクリメントする代わりに、ここではその谷候補Piの確信度Ci の強さを反映するように、Ci に比例する値だけインクリメントする。以上の変換により、谷候補の直線上の整列に対応して、画像uv上で強度の大きな点が現れ、この点の強度は、谷候補点の確信度を考慮したこの直線上への集散の強さを表す。
【0041】ハフピーク決定部34では、ハフ空間Hでの全ての点をスキャンしながら、強度値H(u,v)の大きな点のうちから、最大点Qm =(um ,vm )を求める。ハフ空間の濃度分布H(u,v)で、強度の大きな点は、原画像f(x,y)での谷の直線状の並びに対応する。
【0042】逆ハフ変換部35では、上で求められたピーク点Qm =(um ,vm )を逆ハフ変換することにより、節線候補線y=Ah x+Bhの傾きと切片
【0043】
【数5】
【0044】を計算する。
【0045】近傍選択部36において、逆ハフ変換部35で決定された節線候補線y=Ahx+Bh から一定距離にある点群を、節線を構成する正しい谷群と判定する。それには帯選択部31で選択された帯上の谷群のうち、その座標(xi ,yi )がある小さい正の固定閾値δについてAh xi +Bh−δ<yi <Ah xi +Bh +δを満たす谷のみを選択する。
【0046】最後に、近似線決定部37において、上で選択された谷の座標(xi ,yi )から最小自乗法により次のように節線y=Ax+Bを決定する(和は全ての選択された谷について)。
【0047】
【数6】
【0048】近傍選択部36と近似線決定部37での処理の意味としては次がある。ハフ変換で1点Qm に投影されるのは、谷点の散らばった原画像f(x,y)をハフ変換した時に丸め誤差の範囲でハフ画像H(U×V)のQm の近傍に写像される直線要素であるが、実際の節線は完全な直線ではなく多少円弧上の曲率を持つ場合があり、また節線は幅を持つため、谷点は必ずしも直線上に並ぶ訳ではない。そこで、改めて直線上の近傍(±δ)に並んでいる谷群を選び、それらを最も良く近似する直線を最小自乗法により求める。
【0049】また一方、節線確信度計算部38では、近傍選択部36で選択され近似線決定部37での計算に使用されたそれぞれの谷Pi の確信度Ci について、それらの平均を求め、それを節線位置確信度Cとして出力する。
【0050】以上のようにして、入力画像が与えられた時、そこに含まれる節線の位置を記述する係数AとB、及び節線位置確信度Cが求められる。例えば入力画像中に節線が含まれていない時には確信度が0に近い、低い値になることでそれがわかり、その場合は位置合わせにここで決定された節線情報を使用するべきでないと判定できる。
【0051】本実施例は谷確信度計算部14での谷確信度計算を含んでいるが、これを用いずにハフ変換部32で従来通り1つの谷に対して1インクリメントするという計算法をとることも可能である。
【0052】実施例1は谷確信度計算を含んでいるが、これを用いずに谷情報統合部で全ての谷を使用するとしても、節線抽出の目的をある程度達成することができる。その実施例(実施例2とする)について、図を参照して説明する。
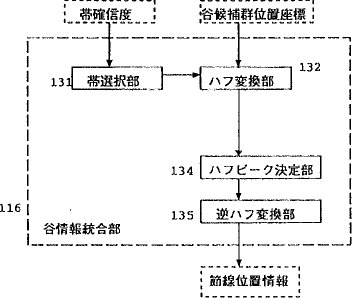
【0053】図6は本発明の指紋特徴抽出装置の実施例2の基本構成図、図7はその谷情報統合部の詳細構成図である。
【0054】垂直領域分離部111、投影計算部112、谷候補計算部113、帯確信度計算部115は、前記の実施例1と同様に構成され、同様に動作する。
【0055】図7の谷情報統合部116では谷候補計算部113と帯確信度計算部115で求めた情報を入力して、節線位置情報を求める。帯選択部131では、帯の確信度Dm が閾値より大きい帯を選択する。
【0056】帯選択部131で選択された帯上の各谷pi について、その座標(xi ,yi)がハフ変換部132に入力される。ハフ変換部132では、偽の谷を含むこれらの中から直線状に並んでいると考えられる節線候補を発見するために、ハフ変換により整列した谷候補を探索する。このハフ変換では、谷候補Pi (xi ,yi )の各々について写像式
【0057】
【数7】
【0058】で決定される画像H(u,v)(0≦u≦U,0≦v≦V)上の曲線を求め、この曲線の通過する点についてハフ空間uv上でその画素値(予め0で初期化されている)を1だけインクリメントする。この変換により、谷候補の直線上の整列に対応して、画像uv上で強度の大きな点が現れ、この点の強度は、谷候補点のこの直線上の集散の強さを表す。
【0059】ハフピーク決定部134では、ハフ空間Hでの全ての点をスキャンしながら、強度値H(u,v)の大きな点のうちから、最大点Qm =(um ,vm )を求める。ハフ空間の濃度分布H(u,v)で、強度の大きな点は、原画像f(x,y)での谷の直線状の並びに対応する。
【0060】逆ハフ変換部135では、上で求められたピーク点Qm (um ,vm )を逆ハフ変換することにより、節線候補線y=Ax+Bの傾きと切片
【0061】
【数8】
【0062】を計算する。
【0063】以上のようにして、入力画像が与えられた時、そこに含まれる節線の位置を記述する係数AとBが求められる。
【0064】本実施例では実施例1で述べた近傍選択部36と近似線決定部37に相当する再計算処理を行っていないが、必要に応じこれと同等なものを含むことにより、より正確な節線位置計算が可能になる。
【0065】ここでは実施例1と実施例2について説明したが、その他、この発明の主旨を変えない範囲で、さまざまに変形した実施が可能であるのはもちろんである。
【0066】
【発明の効果】本発明の装置を用いることによって、カード形式の押捺指紋印象画像で多くの場合画像に含まれている第1関節線の位置と方向を自動抽出することができ、またその自動抽出の信頼性を表すための節線の確信度を求めることができる。抽出された節線と確信度を利用することにより、より安定した位置合わせ・方向合わせが可能になり、指紋照合の精度向上が実現できる。
【0067】なおこのような効果は、例えば水平方向を中心として±60度程度までの角度範囲について十分細かい角度間隔を持つ多数の投影線を考え、それぞれこれに平行な投影を行ってそれぞれの投影ヒストグラムを作成し、それらから最も確からしい節線を含む投影角を選び、そのヒストグラムのくびれをもって節線として選択するという方法でも実現できるが、これでは十分な精度を出すために細かい角度差で多数の投影を行う必要があり、特に直交座標系では斜めの直線に沿っての投影を求める際に演算量が大きくなるという問題がある。本発明の方式はこれに比べ、演算量が少ないという点で優れている。
【図面の簡単な説明】
【図1】本発明の指紋特徴抽出装置の実施例1の構成を示すブロック図である。
【図2】本発明の実施例1の谷候補計算部の構成を示すブロック図である。
【図3】本発明の実施例1の谷情報統合部の構成を示すブロック図である。
【図4】本発明の入力画像の一例を示す図である。
【図5】画像を帯に分離した様子(a)と、その帯で投影ヒストグラムを求めた様子(b)(c)を表した図である。
【図6】本発明の指紋特徴抽出装置の実施例2の構成を示すブロック図である。
【図7】本発明の実施例2での谷情報統合部の構成を示すブロック図である。
【図8】従来の指紋照合用パターン画像処理装置で位置合わせ情報を求める例を示す図である。
【符号の説明】
10,110 指紋特徴抽出装置
11,111 垂直領域分離部
12,112 投影計算部
13,113 谷候補計算部
14 谷確信度計算部
15,115 帯確信度計算部
16,116 谷情報統合部
【0001】
【発明の属する技術分野】本発明は指紋の照合装置に関し、特に指紋データから照合・位置合わせに利用する特徴を抽出する装置に関する。
【0002】
【従来の技術】与えられた指紋画像対の同一性の判定のための照合の実現としては、例えば登録側(以下F側)指紋と探索側(以下S側)指紋の第1・第2関節を含む指の押捺画像が入力された時にそれらの位置合わせを行った後に照合を行う装置として、特開平3−108075(「パターン画像処理装置」)記載の技術がある。ここでは指紋の一致判定に先だって指紋のX方向及びY方向の位置合わせを行うために、図8に示すように指の長手方向と直交する方向に画素の濃度値を累積加算し、そこから得られた濃度分布をヒストグラムのずらし差の2乗和を最小にするようにずらしマッチングを行うという方法で位置合わせを実行する。
【0003】また、カード形式の押捺指紋印象画像を対象にし、登録指紋の大規模なデータベースの中からより精密な照合により一致指紋を探索するための、マニューシャを利用した一致判定の実現として、特公昭63−13226や特公昭63−34508(いずれも「指紋照合装置」)に記述された技術に基づいたものがある。これを使用して高精度の照合を実現する場合も、F側指紋とS側指紋とのより正確な位置合わせ及び方向合わせが行われる必要がある。
【0004】位置合わせのために指紋画像から安定した指紋中心を検出決定する方法として、特開平1−271883、特開平1−271884(いずれも「指紋中心検出方式」)記載の技術がある。特開平1−271883では指紋隆線の各箇所の隆線方向の曲率からその曲率中心を確率的に求め、特開平1−271884ではさらに隆線のなす上向き凸型曲線の頂上(曲率最大点)の位置発見から指紋の中心を求め、それを用いて位置合わせをする。
【0005】また方向合わせのために指紋画像から安定した指頭軸方向を検出決定する方法として、特願平7−79033(「指紋指頭軸方向検出装置」)記載の技術がある。ここでは指紋周辺部の隆線方向と中心からの放射線方向の角度差が指頭軸方向と相関を持っていることを利用し、指頭軸方向が既知の指紋を用いて内積分布パタンの辞書を作っておくことで、未知の指紋についてその内積を算出と辞書パタン参照により、指頭軸方向を検出している。
【0006】
【発明が解決しようとする課題】前記「パターン画像処理装置」明細書に記載された方法では、まず指紋押捺印象の入力に際して指置き台に指ガイドを設ける等の手段により入力指の方向が一定になることを前提とし、それが実現されているとの仮定の元に、画像から得られる画像情報を指の長手方向と直交する方向にのみ加算している。そのため、指紋押捺が傾いている場合に安定して位置合わせを成功させることが困難になる。例えばF側、S側とも指紋10指カードをスキャナーで読み込んだデータが供給されそれらの照合を行う場合、指の押捺方向はカードごと、指ごとに十分統一されておらず、上の仮定の成立は期待できない。このようなデータでの入力画像の例を図4に示す。このように指の軸が傾いている場合、固定方向(この場合は指の軸と直交する方向なので水平方向)について投影累積加算したヒストグラムのずらしマッチングを使用する方法では安定した位置合わせが実現できない。さらに本方式のように指の値と直交する方向の全幅に渡って投影を求める方法では、押捺の際に指が正しく押捺面にフラットな状態で押捺されなかったなどの理由で指紋印象の一部が欠けている場合に、節線部に対応する投影の位置付近以外でも本来大きくなるべきヒストグラムの値が小さくなるという現象が起こり、節線部付近でのヒストグラムが小さくなることを利用した方法では正しい位置合わせが保証されないという問題がある。
【0007】一方、前記「指紋中心検出方式」・「指紋指頭軸方向検出装置」特許に記載された技術は、指紋の位置・方向、さらには押捺状態・品質が多様な場合にも多くの指紋印象において安定で精度良い動作をし、その結果高い照合精度が実現できることが知られている。しかしこれらでも隆線の曲率を決定づける中心付近の画像品質が不十分な場合には十分正確で安定した位置・方向情報を与えられないことがある。
【0008】本発明の目的は、指紋中心付近の画像品質などの理由でこれらの方式が与える位置情報の精度が不十分な場合にも、これに取って代わりあるいはこれを補完する、より安定した位置合わせ・方向合わせを可能にするための情報を指紋から自動抽出する装置を提供することである。より詳しくは、本発明は、上記のカード形式の押捺指紋印象画像で多くの場合画像に含まれている第1関節線(以下「節線」と呼ぶ)の位置と方向を自動抽出する装置を実現することを目的とする。またその自動抽出の信頼性を表すために、決定された節線位置の確信度を同時に求めることを目的とする。
【0009】
【課題を解決するための手段】本発明の指紋特徴抽出装置は、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、複数の帯での谷候補計算部から得られた谷の位置を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする。
【0010】また本発明の指紋特徴抽出装置は、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、各帯でのそれぞれの谷についてその確信度を計算する谷確信度計算部と、それぞれの帯についてその確信度を計算する帯確信度計算部と、複数の帯での谷候補計算部から得られた谷の位置と谷確信度計算部から得られた谷確信度と帯確信度計算部から得られた帯確信度を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする。
【0011】また本発明の指紋特徴抽出装置は、前記谷候補計算部が、入力された投影ヒストグラムをY方向に微分するヒストグラム微分部と、微分のゼロ交差位置を発見するヒストグラム微分ゼロ交差発見部と、そのゼロ交差についてヒストグラムの谷であるかを判定する谷位置決定部とから構成されることを特徴とする。
【0012】また本発明の指紋特徴抽出装置は、前記谷情報統合部が、複数の帯での谷候補計算部から得られた谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、ピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする。
【0013】また本発明の指紋特徴抽出装置は、前記谷情報統合部が、前記帯確信度計算部から入力される確信度情報を使って複数の帯のうちいくつかを選択する帯選択部と、前記谷候補計算部から得られた谷群のうち選択された帯上にある谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、決定されたピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする。
【0014】また本発明の指紋特徴抽出装置は、前記ハフ変換部が、通常のハフ変換のように谷候補点1点についてハフ空間の濃度値を1だけインクリメントするかわりに前記谷確信度計算部から得られるその谷の確信度に比例した値だけインクリメントする、ことを特徴とする。
【0015】また本発明の指紋特徴抽出装置は、前記谷情報統合部がさらに、前記逆ハフ変換部で得られた直線の近傍に存在する谷を選択する近傍点選択部と、選択された谷群の位置からそれを近似する線を決定する近似線決定部と、選択された谷の確信度から決定された線の確信度を計算する節線確信度計算部と、から構成されることを特徴とする。
【0016】
【発明の実施の形態】次に本発明について図面を参照して詳細に説明する。
【0017】図1は本発明の指紋特徴抽出装置の一実施例(実施例1とする)の基本構成図、図2・図3はそれぞれその谷候補計算部・谷情報統合部の詳細構成図である。
【0018】指紋カード上などの指紋押捺印象がデジタル化された画像が装置に入力される。これらの指紋画像では基本的に押捺は指の軸が正確・一定でなくある程度傾いていることがありながらもほぼ垂直に近い角度になるように押捺されている。図4に押捺枠内の指紋画像の例を示す。水平方向をX軸方向、垂直方向をY軸方向とし、押捺枠内(画素数でX×Yとする)を処理領域と呼ぶ。画像はそれぞれの画素での濃度値によりf(x,y)(0≦x<X,0≦y<Y)と表現される。背景は白でf(x,y)は小さく、押捺されたところは黒領域でf(x,y)の値は大きくなるとする。
【0019】本装置では、関節線を発見するために、「関節線は水平に近い直線状の、ある程度の太さを持つ白領域である」というモデルに基づき、節線の白領域は上下と比較すると局所的に濃度値の小さい領域が水平に近い傾きで直線状に並んでいると考える。これを発見するため、画像を細い垂直状の帯に分け、それぞれの中で水平方向の投影を計算する。
【0020】上記のような指紋画像が入力されると、垂直領域分離部11ではこの処理領域内を、垂直な複数の平行線により、縦方向に細長い互いに隣接する長方形の小領域に分ける。これらのそれぞれを「帯」と呼ぶ。
【0021】投影計算部12では、それぞれの帯について、まず縦(Y)方向のローパスフィルタ(例えば平均化フィルタ)による平滑化を施す。これは一般に隆線による濃度変化は関節の幅より小さいことを利用して、後述のように投影ヒストグラムから低濃度領域を発見する時に、水平方向の隆線の影響が生じるのを防ぐためである。フィルタのウィンドウサイズを2L+1として例えば次のようにして平滑化画像g(x,y)を得る。
【0022】
【数1】
【0023】ついでそれぞれの帯の中で、水平方向の投影を計算する。帯数をNh 、帯の幅をW=X/Nh として、
【0024】
【数2】
【0025】これらはNh 個の帯ごとの投影ヒストグラムとなる。図5に、処理領域内を平行な帯に分離した様子(a)と、帯において投影ヒストグラムを計算した様子(b)(c)を示す。
【0026】画像の品質が理想的ではなく、かつ節線が傾いていることがあるために、節線部分でも上の投影結果が0になる訳ではないが、局所的に上下の部分よりは濃度が低くなる。谷候補計算部13では、これらから白領域(ヒストグラムの谷)の候補点を探す。
【0027】まず図2のヒストグラム微分部22では、上のヒストグラムhm (y)で上から下へ(yの大きくなる方向へ)スキャンしながらその微分であるヒストグラムの傾き
【0028】
【外1】
【0029】を求める。
【0030】ヒストグラム微分ゼロ交差発見部23では、その正負の変化により1.負の傾きが−ε(定数)より小なら谷の開始、2.傾きが負から0を交差し正に変わった点を谷底、3.一度εを越えてからそれを下回った点を谷の終わり、とするという方法でゼロ交差を発見する(ただしεは小さい正定数)。前処理で平滑化を施してあるため、このような単純な方法で安定して谷候補を発見できる。
【0031】谷位置決定部24では、上で求めた谷候補で深さと幅が一定以上のものを「谷」Pi とし、それらの谷位置座標(xi ,yi )を出力する。そのX座標xi としては帯の水平方向中央のX座標値、Y座標yi としては谷底のY座標値をとる。谷はそれぞれの帯について0個、あるいは複数個あり得る。
【0032】上で求められた谷には、本当の節線を構成する谷の他に、皺、隆線、傷、あるいは画像採取時に薄く入力されたり汚れ、にじみなどささまざまな要因によって生じた局所低濃度領域による偽の谷が多く含まれる。これらの中で正確な選択をするために、谷確信度計算部14では、求められた谷のそれぞれについて、位置、谷の深度、谷の深さと幅の比のファクタから計算される「節線指標」(谷確信度)を与える。いずれのファクタについてもその計算式は多数のサンプルから統計確率的に予め決定しておく。例えば多数の画像について手動で正解の節線位置を与え、同じ谷抽出を行った時に、この節線に対応する谷についての位置、深度、深さと幅の比を求め、この分布のピークに近い値を持つ時に指標が大きくなるように決定する。これにより、それぞれの谷Pi について確信度Ci が決定される。確信度は正の値で、その谷が節線を構成する谷らしいほど、大きな値を持つ。
【0033】また帯確信度計算部15において、それぞれの帯の確信度として、hm (y)のY方向の和
【0034】
【数3】
【0035】を算出する。
【0036】谷情報統合部16では上で求めた情報を入力して、節線位置情報とその確信度である節位置確信度を求める。
【0037】まず図3の帯選択部31では、帯の確信度Dm が閾値より大きい帯を選択する。これは原画像で指領域の外(枠の両横端)から指の端にかけては十分な押捺品質が得られておらず、あるいは指の両脇(処理領域の両端)付近のように帯内に十分な指紋押捺が含まれない帯では十分な濃度情報を持っていないため、そこから得られた谷候補の信頼性も低いと考えられるからである。閾値としては例えば画像全体の濃度平均を使用する。
【0038】帯選択部31で選択された帯上に存在する各谷Pi について、その座標(xi,yi )と確信度Ci をハフ変換部32に入力する。ハフ変換部32では、偽の谷を含むこれらの中から直線状に並んでいると考えられる節線候補を発見するために、ハフ変換により整列した谷候補を探索する。ハフ変換では谷候補Pi (xi ,yi )の各々について写像式
【0039】
【数4】
【0040】で決定される画像H(u,v)(0≦u≦U,0≦v≦V)上の曲線を求め、この曲線の通過する点についてハフ空間uv上でその画素値(予め0で初期化されている)をインクリメントする。通常のハフ変換でのようにハフ空間画像H(u,v)の画素値を1ずつインクリメントする代わりに、ここではその谷候補Piの確信度Ci の強さを反映するように、Ci に比例する値だけインクリメントする。以上の変換により、谷候補の直線上の整列に対応して、画像uv上で強度の大きな点が現れ、この点の強度は、谷候補点の確信度を考慮したこの直線上への集散の強さを表す。
【0041】ハフピーク決定部34では、ハフ空間Hでの全ての点をスキャンしながら、強度値H(u,v)の大きな点のうちから、最大点Qm =(um ,vm )を求める。ハフ空間の濃度分布H(u,v)で、強度の大きな点は、原画像f(x,y)での谷の直線状の並びに対応する。
【0042】逆ハフ変換部35では、上で求められたピーク点Qm =(um ,vm )を逆ハフ変換することにより、節線候補線y=Ah x+Bhの傾きと切片
【0043】
【数5】
【0044】を計算する。
【0045】近傍選択部36において、逆ハフ変換部35で決定された節線候補線y=Ahx+Bh から一定距離にある点群を、節線を構成する正しい谷群と判定する。それには帯選択部31で選択された帯上の谷群のうち、その座標(xi ,yi )がある小さい正の固定閾値δについてAh xi +Bh−δ<yi <Ah xi +Bh +δを満たす谷のみを選択する。
【0046】最後に、近似線決定部37において、上で選択された谷の座標(xi ,yi )から最小自乗法により次のように節線y=Ax+Bを決定する(和は全ての選択された谷について)。
【0047】
【数6】
【0048】近傍選択部36と近似線決定部37での処理の意味としては次がある。ハフ変換で1点Qm に投影されるのは、谷点の散らばった原画像f(x,y)をハフ変換した時に丸め誤差の範囲でハフ画像H(U×V)のQm の近傍に写像される直線要素であるが、実際の節線は完全な直線ではなく多少円弧上の曲率を持つ場合があり、また節線は幅を持つため、谷点は必ずしも直線上に並ぶ訳ではない。そこで、改めて直線上の近傍(±δ)に並んでいる谷群を選び、それらを最も良く近似する直線を最小自乗法により求める。
【0049】また一方、節線確信度計算部38では、近傍選択部36で選択され近似線決定部37での計算に使用されたそれぞれの谷Pi の確信度Ci について、それらの平均を求め、それを節線位置確信度Cとして出力する。
【0050】以上のようにして、入力画像が与えられた時、そこに含まれる節線の位置を記述する係数AとB、及び節線位置確信度Cが求められる。例えば入力画像中に節線が含まれていない時には確信度が0に近い、低い値になることでそれがわかり、その場合は位置合わせにここで決定された節線情報を使用するべきでないと判定できる。
【0051】本実施例は谷確信度計算部14での谷確信度計算を含んでいるが、これを用いずにハフ変換部32で従来通り1つの谷に対して1インクリメントするという計算法をとることも可能である。
【0052】実施例1は谷確信度計算を含んでいるが、これを用いずに谷情報統合部で全ての谷を使用するとしても、節線抽出の目的をある程度達成することができる。その実施例(実施例2とする)について、図を参照して説明する。
【0053】図6は本発明の指紋特徴抽出装置の実施例2の基本構成図、図7はその谷情報統合部の詳細構成図である。
【0054】垂直領域分離部111、投影計算部112、谷候補計算部113、帯確信度計算部115は、前記の実施例1と同様に構成され、同様に動作する。
【0055】図7の谷情報統合部116では谷候補計算部113と帯確信度計算部115で求めた情報を入力して、節線位置情報を求める。帯選択部131では、帯の確信度Dm が閾値より大きい帯を選択する。
【0056】帯選択部131で選択された帯上の各谷pi について、その座標(xi ,yi)がハフ変換部132に入力される。ハフ変換部132では、偽の谷を含むこれらの中から直線状に並んでいると考えられる節線候補を発見するために、ハフ変換により整列した谷候補を探索する。このハフ変換では、谷候補Pi (xi ,yi )の各々について写像式
【0057】
【数7】
【0058】で決定される画像H(u,v)(0≦u≦U,0≦v≦V)上の曲線を求め、この曲線の通過する点についてハフ空間uv上でその画素値(予め0で初期化されている)を1だけインクリメントする。この変換により、谷候補の直線上の整列に対応して、画像uv上で強度の大きな点が現れ、この点の強度は、谷候補点のこの直線上の集散の強さを表す。
【0059】ハフピーク決定部134では、ハフ空間Hでの全ての点をスキャンしながら、強度値H(u,v)の大きな点のうちから、最大点Qm =(um ,vm )を求める。ハフ空間の濃度分布H(u,v)で、強度の大きな点は、原画像f(x,y)での谷の直線状の並びに対応する。
【0060】逆ハフ変換部135では、上で求められたピーク点Qm (um ,vm )を逆ハフ変換することにより、節線候補線y=Ax+Bの傾きと切片
【0061】
【数8】
【0062】を計算する。
【0063】以上のようにして、入力画像が与えられた時、そこに含まれる節線の位置を記述する係数AとBが求められる。
【0064】本実施例では実施例1で述べた近傍選択部36と近似線決定部37に相当する再計算処理を行っていないが、必要に応じこれと同等なものを含むことにより、より正確な節線位置計算が可能になる。
【0065】ここでは実施例1と実施例2について説明したが、その他、この発明の主旨を変えない範囲で、さまざまに変形した実施が可能であるのはもちろんである。
【0066】
【発明の効果】本発明の装置を用いることによって、カード形式の押捺指紋印象画像で多くの場合画像に含まれている第1関節線の位置と方向を自動抽出することができ、またその自動抽出の信頼性を表すための節線の確信度を求めることができる。抽出された節線と確信度を利用することにより、より安定した位置合わせ・方向合わせが可能になり、指紋照合の精度向上が実現できる。
【0067】なおこのような効果は、例えば水平方向を中心として±60度程度までの角度範囲について十分細かい角度間隔を持つ多数の投影線を考え、それぞれこれに平行な投影を行ってそれぞれの投影ヒストグラムを作成し、それらから最も確からしい節線を含む投影角を選び、そのヒストグラムのくびれをもって節線として選択するという方法でも実現できるが、これでは十分な精度を出すために細かい角度差で多数の投影を行う必要があり、特に直交座標系では斜めの直線に沿っての投影を求める際に演算量が大きくなるという問題がある。本発明の方式はこれに比べ、演算量が少ないという点で優れている。
【図面の簡単な説明】
【図1】本発明の指紋特徴抽出装置の実施例1の構成を示すブロック図である。
【図2】本発明の実施例1の谷候補計算部の構成を示すブロック図である。
【図3】本発明の実施例1の谷情報統合部の構成を示すブロック図である。
【図4】本発明の入力画像の一例を示す図である。
【図5】画像を帯に分離した様子(a)と、その帯で投影ヒストグラムを求めた様子(b)(c)を表した図である。
【図6】本発明の指紋特徴抽出装置の実施例2の構成を示すブロック図である。
【図7】本発明の実施例2での谷情報統合部の構成を示すブロック図である。
【図8】従来の指紋照合用パターン画像処理装置で位置合わせ情報を求める例を示す図である。
【符号の説明】
10,110 指紋特徴抽出装置
11,111 垂直領域分離部
12,112 投影計算部
13,113 谷候補計算部
14 谷確信度計算部
15,115 帯確信度計算部
16,116 谷情報統合部
【特許請求の範囲】
【請求項1】入力された指紋画像の特徴を抽出する装置において、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、複数の帯での谷候補計算部から得られた谷の位置を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする指紋特徴抽出装置。
【請求項2】 入力された指紋画像の特徴を抽出する装置において、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、各帯でのそれぞれの谷についてその確信度を計算する谷確信度計算部と、それぞれの帯についてその確信度を計算する帯確信度計算部と、複数の帯での谷候補計算部から得られた谷の位置と谷確信度計算部から得られた谷確信度と帯確信度計算部から得られた帯確信度を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする指紋特徴抽出装置。
【請求項3】前記谷候補計算部が、入力された投影ヒストグラムをY方向に微分するヒストグラム微分部と、微分のゼロ交差位置を発見するヒストグラム微分ゼロ交差発見部と、そのゼロ交差についてヒストグラムの谷であるかを判定する谷位置決定部とから構成されることを特徴とする請求項1又は2記載の指紋特徴抽出装置。
【請求項4】前記谷情報統合部が、複数の帯での谷候補計算部から得られた谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、ピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする請求項1記載の指紋特徴抽出装置。
【請求項5】前記谷情報統合部が、前記帯確信度計算部から入力される確信度情報を使って複数の帯のうちいくつかを選択する帯選択部と、前記谷候補計算部から得られた谷群のうち選択された帯上にある谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、ピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする請求項2記載の指紋特徴抽出装置。
【請求項6】前記ハフ変換部が、通常のハフ変換のように谷候補点1点についてハフ空間の濃度値を1だけインクリメントするかわりに前記谷確信度計算部から得られるその谷の確信度に比例した値だけインクリメントする、ことを特徴とする請求項5記載の指紋特徴抽出装置。
【請求項7】前記谷情報統合部が更に、前記逆ハフ変換部で得られた直線の近傍に存在する谷を選択する近傍点選択部と、選択された谷群の位置からそれを近似する線を決定する近似線決定部と、選択された谷の確信度から決定された線の確信度を計算する節線確信度計算部と、を備えることを特徴とする請求項5記載の指紋特徴抽出装置。
【請求項1】入力された指紋画像の特徴を抽出する装置において、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、複数の帯での谷候補計算部から得られた谷の位置を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする指紋特徴抽出装置。
【請求項2】 入力された指紋画像の特徴を抽出する装置において、入力画像をY方向の平行な直線群により複数の小領域(以下帯と呼ぶ)に分ける垂直領域分離部と、それぞれの帯でX方向への濃度投影処理を行い、投影ヒストグラムを求める投影計算部と、各帯で得られた投影ヒストグラムから谷と呼ぶ極小点を求める谷候補計算部と、各帯でのそれぞれの谷についてその確信度を計算する谷確信度計算部と、それぞれの帯についてその確信度を計算する帯確信度計算部と、複数の帯での谷候補計算部から得られた谷の位置と谷確信度計算部から得られた谷確信度と帯確信度計算部から得られた帯確信度を入力して、指紋画像の節線位置とその確信度を求める谷情報統合部とからなることを特徴とする指紋特徴抽出装置。
【請求項3】前記谷候補計算部が、入力された投影ヒストグラムをY方向に微分するヒストグラム微分部と、微分のゼロ交差位置を発見するヒストグラム微分ゼロ交差発見部と、そのゼロ交差についてヒストグラムの谷であるかを判定する谷位置決定部とから構成されることを特徴とする請求項1又は2記載の指紋特徴抽出装置。
【請求項4】前記谷情報統合部が、複数の帯での谷候補計算部から得られた谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、ピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする請求項1記載の指紋特徴抽出装置。
【請求項5】前記谷情報統合部が、前記帯確信度計算部から入力される確信度情報を使って複数の帯のうちいくつかを選択する帯選択部と、前記谷候補計算部から得られた谷群のうち選択された帯上にある谷群にハフ変換を施すハフ変換部と、変換後のハフ空間でピークを選択するハフピーク決定部と、ピークから得られる位置座標を逆ハフ変換した直線を求める逆ハフ変換部と、から構成されることを特徴とする請求項2記載の指紋特徴抽出装置。
【請求項6】前記ハフ変換部が、通常のハフ変換のように谷候補点1点についてハフ空間の濃度値を1だけインクリメントするかわりに前記谷確信度計算部から得られるその谷の確信度に比例した値だけインクリメントする、ことを特徴とする請求項5記載の指紋特徴抽出装置。
【請求項7】前記谷情報統合部が更に、前記逆ハフ変換部で得られた直線の近傍に存在する谷を選択する近傍点選択部と、選択された谷群の位置からそれを近似する線を決定する近似線決定部と、選択された谷の確信度から決定された線の確信度を計算する節線確信度計算部と、を備えることを特徴とする請求項5記載の指紋特徴抽出装置。
【図1】

【図4】
【図2】
【図3】
【図5】
【図7】
【図6】
【図8】
【図4】
【図2】
【図3】
【図5】
【図7】
【図6】
【図8】
【特許番号】第2776340号
【登録日】平成10年(1998)5月1日
【発行日】平成10年(1998)7月16日
【国際特許分類】
【出願番号】特願平7−289460
【出願日】平成7年(1995)11月8日
【公開番号】特開平9−134427
【公開日】平成9年(1997)5月20日
【審査請求日】平成7年(1995)11月8日
【出願人】(000004237)日本電気株式会社 (19,353)
【登録日】平成10年(1998)5月1日
【発行日】平成10年(1998)7月16日
【国際特許分類】
【出願日】平成7年(1995)11月8日
【公開番号】特開平9−134427
【公開日】平成9年(1997)5月20日
【審査請求日】平成7年(1995)11月8日
【出願人】(000004237)日本電気株式会社 (19,353)
[ Back to top ]