
指紋読取装置、情報処理装置
【課題】窮屈な姿勢を強いられることなく指を適正読み取り位置に位置決めでき、正確な指紋認証を行いうる指紋読取装置、情報処理装置を提供する。
【解決手段】スライド型の指紋センサー1と、指の第一関節部を指紋センサー1の中央位置に位置決めさせる位置決め部を有し、位置決め部は、指紋センサー1の配設位置に対し指走査方向の前方位置に配設された前方指走査面12と、指紋センサー1の配設位置に対し指走査方向の後方位置に配設された後方指走査面13と、指紋センサー1の指走査方向に対するまたはに、押下により指が走査する走査面まで下降すると共に押下の解除により押下前の位置に弾性復元するボタン6を有する。
【解決手段】スライド型の指紋センサー1と、指の第一関節部を指紋センサー1の中央位置に位置決めさせる位置決め部を有し、位置決め部は、指紋センサー1の配設位置に対し指走査方向の前方位置に配設された前方指走査面12と、指紋センサー1の配設位置に対し指走査方向の後方位置に配設された後方指走査面13と、指紋センサー1の指走査方向に対するまたはに、押下により指が走査する走査面まで下降すると共に押下の解除により押下前の位置に弾性復元するボタン6を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は指紋読取装置、情報処理装置に係り、特に指紋センサー上で指をスライドさせるスライド型の指紋読取装置及び前記指紋読取装置を備えた情報処理装置に関するものである。
【背景技術】
【0002】
近年、PC(Personal Computer)やPDA(Personal Digital Assistants),携帯電話等の情報処理装置分野において、小型で安価な装置実現を可能にするスライド型或いはスウィープ型(以下スライド型)指紋センサーを備えた指紋読取装置が普及しつつある。
【0003】
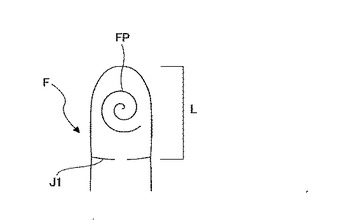
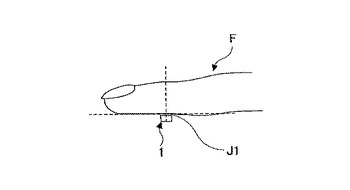
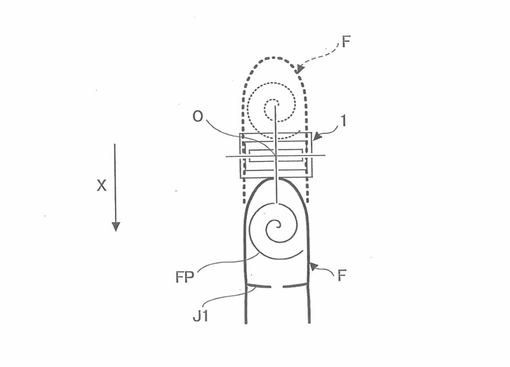
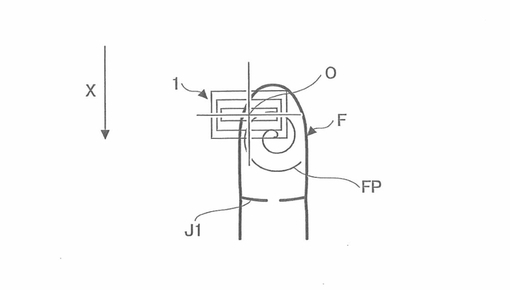
図1A〜図1Cは、このようなスライド型指紋読取装置における指紋の読取範囲及び読取方法を説明するための図である。スライド型指紋読取装置においては、通常指Fの第一関節J1より先の部分(図中、矢印Lで示す部分)が読取範囲となるため、走査する指Fの第一関節部J1を指紋センサー1の中央部近傍に来るように指を走査面に正しく置く必要がある(図1B及び図1C参照)。
【0004】
図2Aに示すように、指Fの中心が指紋センサー1の中心位置Oを通るように矢印X方向に走査された場合、確実に指紋FPの読み取りを行うことができる。しかしながら、指紋の読み取り時には指紋センサー1は指Fに隠れてうまく第1関節J1を指紋センサー1に合わせることが困難である。
【0005】
よって、指紋センサー1の中心位置Oに位置するように第1関節J1を正しく位置決めすることができず、例えば図2Bに示すように第1関節J1の位置が指紋センサー1の中心位置Oに対して左右にずれたり、また図2Cに示すように第1関節J1の位置が指紋センサー1の中心位置Oよりも下になったりしてしまう。このような場合、読み取るべき範囲の画像が欠落して十分な画像が得られず、認証に失敗するという問題がある。
【0006】
このような問題を解決する方法として、指紋センサーが指に隠れないように、指紋センサーの真上より若干左右にずれた位置から指紋センサー近傍位置を目視し、指の第一関節部が指紋センサーの中央部に位置するよう指を置く方法が考えられる。しかしながら、この方法では、毎回指紋走査のために窮屈な姿勢を強いられるという問題が生じる。
【0007】
上記の問題を解決する方法として、特許文献1には、ガイド部を互いに略平行に並んだ1対の突条とし、このガイド部としての各突条を指の移動方向に延在するようにした構成が開示されている。更に、指紋を読み取る透明部材のすぐ後方に、ローラ及び指の移動方向(前後)に沿って指幅よりやや狭い突起状の2本のガイド部を設けることが記載されている。
【0008】
また特許文献2には、指紋センサーより少し離れた指紋走査方向前方に、被験者の指Fの有無を検知するスイッチを有する構成が開示されている。このスイッチは、第一関節より上の指の腹で押下する構成とされている。
【0009】
更に、特許文献3には、V字型溝の両側に一対のケースパッドを備え、これらケースパッドに指紋検出時の指の位置の指標としての役割を担わせ、スイープ型指紋センサーにより指紋を検出させようとするときは、指の先端に最も近い第1関節が、2つのケースパッド同士を結ぶ直線上に位置するように指をあてがうことが開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2004―240924号公報
【特許文献2】特開2004―272745号公報
【特許文献3】特開2005―259150号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上記の特許文献1に開示された方法では、指幅よりやや狭い突起状の2本のガイド部に指の腹部を均等に置くようにすることにより、指紋センサーの指走査方向に対して垂直方向中央部への最初の指置き位置への誘導はある程度可能になると思われる。しかしながら、指紋センサーの指走査方向に対しては、指紋センサー中央部近傍に指の第一関節部を正しく置く方法については開示されていない。
【0012】
また、特許文献2に開示された方法では、第一関節より上の指の腹で押下する形となり、指の背側だけから見て腹の中心で押せるとは限らない。このため、十分な指紋画像が得られず、認証に失敗するおそれがある。
【0013】
更に、特許文献3に開示された方法では、指を背側から見た場合、第一関節の位置は容易に判別できず、やはり十分な指紋画像が得られず正確な認証を得られないおそれがある。
【課題を解決するための手段】
【0014】
本発明は、上述した従来技術の問題を解決する、改良された有用な指紋読取装置及び前記指紋読取装置を備えた情報処理装置を提供することを総括的な目的とする。
【0015】
本発明のより詳細な目的は、窮屈な姿勢を強いられることなく指を適正読み取り位置に位置決めでき、正確な指紋認証を行いうる指紋読取装置及び前記指紋読取装置を備えた情報処理装置を提供することにある。
【0016】
この目的は、
スライド型の指紋センサーと、
指の第一関節部を前記指紋センサーの中央位置に位置決めさせる位置決め部を有し、
前記位置決め部は、
前記指紋センサーの配設位置に対し、指走査方向の前方位置に配設された前方指走査面と、
前記指紋センサーの配設位置に対し、前記指走査方向の後方位置に配設された後方指走査面と、
前記指紋センサーの前記指走査方向に対する前部または後部に、押下により前記指が走査する走査面まで下降すると共に、前記押下の解除により押下前の位置に弾性復元するボタンを有する、
指紋読取装置により解決することができる。
【発明の効果】
【0017】
上記の発明によれば、指紋センサーに対して適性位置に指を正しく位置決めすることができ、認証精度の向上を図ることができる。
【図面の簡単な説明】
【0018】
【図1A】指紋読取を行う範囲を説明するための図である。
【図1B】指紋読取時における指の走査方法を説明するための図である(その1)。
【図1C】指紋読取時における指の走査方法を説明するための図である(その2)。
【図2A】指紋センサーの位置と指の置き方を説明するための図である(適正時)。
【図2B】指紋センサーの位置と指の置き方を説明するための図である(不適正時その1)。
【図2C】指紋センサーの位置と指の置き方を説明するための図である(不適正時その2)。
【図3】第1実施例である指紋読取装置が設けられたパーソナルコンピュータを示す斜視図である。
【図4】指紋読取中における、図3に矢印Xで示す部分を拡大して示す図である。
【図5】指紋読取後における、図3に矢印Xで示す部分を拡大して示す図である。
【図6】本発明の第1実施例である指紋読取装置を示す平面図である。
【図7】本発明の第1実施例である指紋読取装置を示す断面図である。
【図8】本発明の第2実施例である指紋読取装置を示す平面図である。
【図9】本発明の第2実施例である指紋読取装置を示す断面図である。
【図10】本発明の第3実施例である指紋読取装置を示す平面図である。
【図11】本発明の第3実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図12】本発明の第3実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【図13】本発明の第4実施例である指紋読取装置を示す平面図である。
【図14】本発明の第4実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図15】本発明の第4実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【図16】本発明の第5実施例である指紋読取装置を示す平面図である。
【図17】本発明の第5実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図18】本発明の第5実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【図19】本発明の第6実施例である指紋読取装置を示す平面図である。
【図20】本発明の第6実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図21】本発明の第6実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【発明を実施するための形態】
【0019】
次に、本発明の実施の形態について図面と共に説明する。
【実施例1】
【0020】
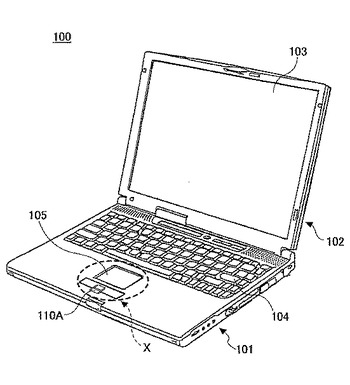
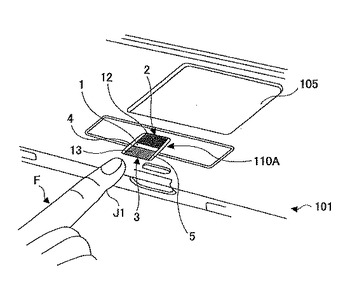
図3〜図5は、本発明の第1実施例である指紋読取装置110Aの適用例を示している。本実施例では、指紋読取装置110Aを情報処理装置の一例であるパーソナルコンピュータ100に搭載した例を示している。パーソナルコンピュータ100は、キーボード104及びフラットポイント105等を有した本体部101と、液晶ディスプレイ103等を搭載した蓋体部102とを有している。
【0021】
指紋読取装置110Aは、フラットポイント105の近傍位置に配設されている。この指紋読取装置110Aは指Fの指紋FPを読み取る装置であり、これにより予め指紋登録した人のみがパーソナルコンピュータ100を使用する構成とすることができ、セキュリティの向上を図ることができる。
【0022】
本実施例に係る指紋読取装置110Aは、指紋センサー1上で指Fをスライドさせることにより指紋FPを読み取るスライド型の指紋読取装置である。具体的には、図4に示すように、指紋読取装置110A上に指Fを置き、矢印X方向に指走査することにより指紋の読み取りを行う。この際、指走査する指Fの第一関節部J1を指紋センサー1の中心位置Oに位置決めして指Fを走査する必要があることは前述した通りである。
【0023】
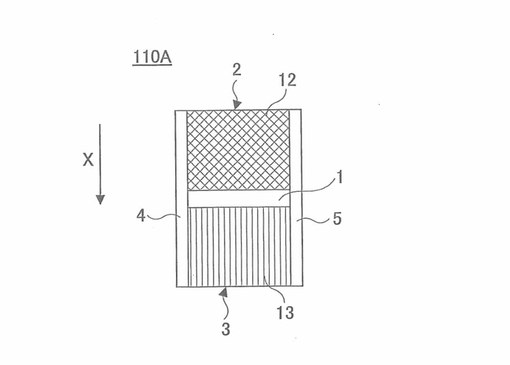
第1実施例に係る指紋読取装置110Aは、図5及び図6に示すように、指紋センサー1、前方指走査面2、後方指走査面3、ガイド側壁4、及びガイド側壁5等により構成されている。
【0024】
前方指走査面2及び後方指走査面3は、指紋FPの読み取り時に指Fが走査する走査面を構成する。前方指走査面2は、指Fの走査方向(矢印X方向)に対し指紋センサー1の前方位置に配置されている。また後方指走査面3は、指Fの走査方向(矢印X方向)に対し指紋センサー1の後方位置に配置されている。
【0025】
ガイド側壁4,5は、指Fの走査面となる前方指走査面2及び後方指走査面3の両側位置に配設されている。このガイド側壁4,5の上面の高さは本体部101の表面と面一となるよう設定されている。
【0026】
これに対し、前記した前方指走査面2及び後方指走査面3は指Fの走査を円滑に行うために断面視で下に凸となる湾曲形状とされている(図7参照)。このため、相対的に、前方指走査面2及び後方指走査面3の表面の高さは、ガイド側壁4,5の上面の高さに対して低くなっている。よって、指Fを走査面(前方指走査面2及び後方指走査面3)上で指走査する際、指Fの両側はガイド側壁4,5にガイドされるため、円滑な指走査を行うことができる。
【0027】
ここで、本実施例に係る指紋読取装置110Aの前方指走査面2及び後方指走査面3の表面に注目する。本実施例に係る前方指走査面2の表面には第1の凹凸部12が形成されており、また後方指走査面3の表面には第2の凹凸部13が形成されている。
【0028】
この第1及び第2の凹凸部12,13は、各指走査面2,3の表面に対してシボ加工,ローレット加工,表面粗化加工を行うことにより形成することができる。また、各凹凸部12,13の表面の凹凸状態は同一ではなく、異なる凹凸状態となるよう設定されている。
【0029】
例えば、第1の凹凸部12の凹凸状態を粗く設定した場合、第2の凹凸部13の凹凸状態はこれよりも細かい凹凸となるよう設定されている。また、第1または第2の凹凸部12,13のうち、一方に対してのみ凹凸を設け、他方を平坦面(凹凸を形成しない面)とすることも可能である。
【0030】
この構成とすることにより、指Fの指紋FPが少し浮いた状態で指Fの腹が、前方指走査面2(第1の凹凸部12を有する)または後方指走査面3(第2の凹凸部13を有する)に接触すると、指Fの触覚により第1の凹凸部12と第2の凹凸部13との相違を識別することができる。
【0031】
このように指Fの触覚により第1の凹凸部12と第2の凹凸部13の識別が可能となることにより、指Fの第1関節J1の位置が指紋センサー1に対して上側か下側か、左側か右側かを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、第1の凹凸部12及び第2の凹凸部13は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0032】
上記のように指Fの正しい位置が確認されると、図7に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【実施例2】
【0033】
図8及び図9は、第2実施例である指紋読取装置110Bを示している。尚、第2実施例以降の各実施例で用いる図面(図8〜図33)において、第1実施例の説明に用いた図1〜図7に示した構成と対応する構成については同一符号を付して、その説明を適宜省略する。
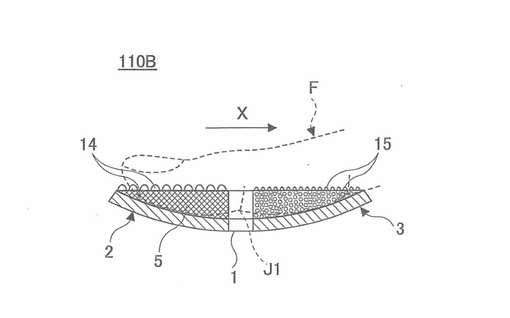
【0034】
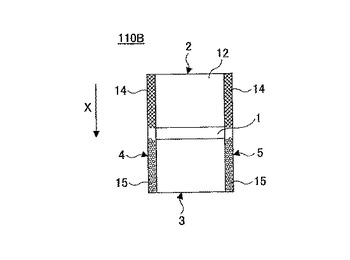
前記した第1実施例に係る指紋読取装置110Aは、前方指走査面2及び後方指走査面3の表面に凹凸部12,13を形成した構成とした。これに対して本実施例に係る指紋読取装置110Bでは、ガイド側壁4,5の上面で前方指走査面2と対向する位置に第1の凹凸部14を形成すると共に、ガイド側壁4,5の上面で後方指走査面3と対向する位置に第2の凹凸部15を形成した構成としている。
【0035】
この第1及び第2の凹凸部14,15は、各ガイド側壁4,5の上面に対してシボ加工,ローレット加工,表面粗化加工を行うことにより形成することができる。また、各凹凸部14,15の表面の凹凸状態は同一ではなく、異なる凹凸状態となるよう設定されている。
【0036】
例えば、第1の凹凸部14の凹凸状態を粗く設定した場合、第2の凹凸部15の凹凸状態はこれよりも細かい凹凸となるよう設定されている。また、第1または第2の凹凸部14,15のうち、一方に対してのみ凹凸を設け、他方を平坦面(凹凸を形成しない面)とすることも可能である。
【0037】
この構成とすることにより、指Fの指紋FPが少し浮いた状態で指Fの腹がガイド側壁4,5に接触すると、指Fの触覚により第1の凹凸部14と第2の凹凸部15との相違を識別することができる。
【0038】
このように指Fの触覚により第1の凹凸部14と第2の凹凸部15の識別が可能となることにより、指Fの第1関節J1の位置の指紋センサー1に対するずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、第1の凹凸部14及び第2の凹凸部15は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0039】
上記のように指Fの正しい位置が確認されると、図9に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0040】
尚、図9に示すように、第1の凹凸部14をガイド側壁4,5の上面ばかりでなく前方指走査面2と対向する内壁に形成し、第2の凹凸部15をガイド側壁4,5の前方指走査面3と対向する内壁に形成する構成としてもよい。これにより、指Fによる位置認識を更に精度よく行うことができる。
【実施例3】
【0041】
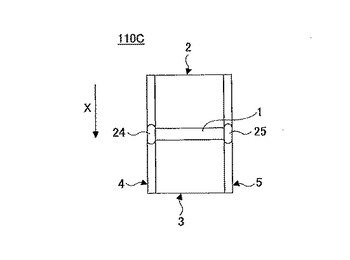
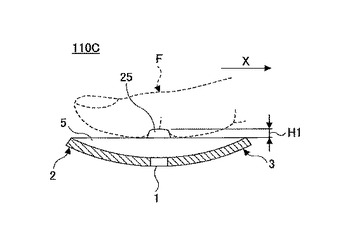
図10〜図12は、第3実施例に係る指紋読取装置110Cを示している。本実施例に係る指紋読取装置110Cは、ガイド側壁4,5の上面と指紋センサー1の配設位置と対向する位置に、凸状突起24,25を設けた構成としている。この凸状突起24,25のガイド側壁4,5の上面からの突出量H1(図11に示す)は、例えば1mm〜3mmに設定されている。
【0042】
この構成とすることにより、図11に示すように指Fの指紋FPが少し浮いた状態で指Fの腹が凸状突起24,25に接触すると、指Fの触覚により指紋センサー1に対する指Fの位置を認識することができる。
【0043】
このように、本実施例に係る110Cでは、指紋センサー1に対する指Fの第1関節J1の位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、凸状突起24,25は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0044】
上記のように指Fの正しい位置が確認されると、図12に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0045】
尚、上記した実施例ではガイド側壁4,5の指紋センサー1と対向する位置に凸状突起24,25を形成する構成を例に挙げて説明したが、指Fで認識できる構成であれば、凹状窪みを形成する構成としてもよい。
【実施例4】
【0046】
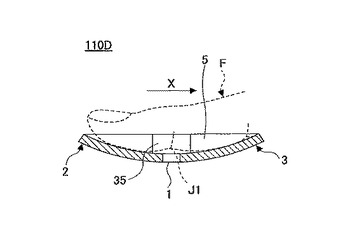
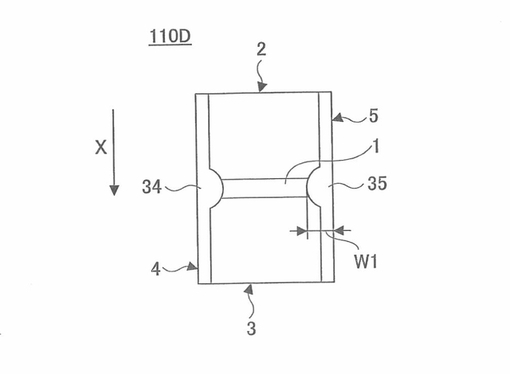
図13〜図15は、第4実施例に係る指紋読取装置110Dを示している。本実施例に係る指紋読取装置110Dは、ガイド側壁4,5の内壁で指紋センサー1の配設位置と対向する位置に内側突出部34,35を形成することにより、前方指走査面2及び後方指走査面3により構成される指Fの走査面に幅狭部を形成した構成としている。この内側突出部34,35のガイド側壁4,5の内壁からの突出量W1(図13に示す)は、例えば0.5mm〜2mmである。
【0047】
この構成とすることにより、図14に示す指Fの指紋FPが少し浮いた状態から図15に示すように指Fを指紋センサー1に向け下ろすと、指Fの腹が内側突出部34,35に接触し、この指Fの触覚により指紋センサー1に対する指Fの位置を認識することができる。
【0048】
このように指Fの触覚により指紋読取装置110Dに対する指Fの位置認識が可能となることにより、指Fの第1関節J1の指紋センサー1に対する位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、内側突出部34及び内側突出部35により構成される幅狭部は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0049】
上記のように指Fの正しい位置が確認されると、図15に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0050】
尚、上記した実施例ではガイド側壁4,5の指紋センサー1と対向する位置に凸状突起24,25を形成する構成を例に挙げて説明したが、指Fで認識できる構成であれば、凹状窪みを形成する構成としてもよい。
【実施例5】
【0051】
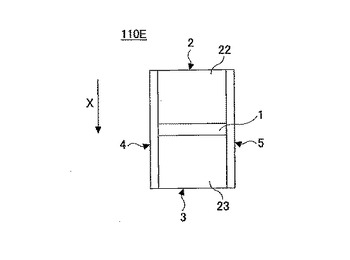
図16〜図18は、第5実施例に係る指紋読取装置110Eを示している。本実施例に係る指紋読取装置110Eは、前方指走査面2,3の表面を鏡面処理することにより鏡面処理部22,23を形成したものである。
【0052】
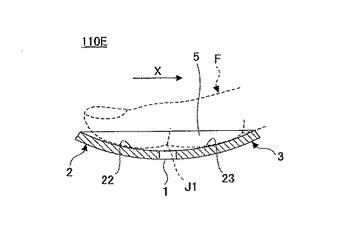
この構成とすることにより、指Fを鏡面処理部22及び鏡面処理部23の上にかざし、この時点で手前より各鏡面処理部22,23を覗くと(図17参照)、指Fが鏡面処理部22,23に映し出される(第1関節J1も映し出される)。よって、指紋の読み取りを行おうとする者は、鏡面処理部22,23に映し出される鏡像を見ながら、指紋センサー1に対して第1関節J1の位置決めを行うことができる。
【0053】
このように本実施例に係る指紋読取装置110Eは、鏡面処理部22,23に映し出される鏡像を見ることにより、第1関節J1の指紋センサー1に対する位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、鏡面処理部22,23は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0054】
上記のように指Fの正しい位置が確認されると、図21に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0055】
尚、上記した実施例では2,3の双方の表面に鏡面処理部22,23を設けた構成を示したが、指Fを視認できればいずれか一方にのみ鏡面処理部を設けた構成としてもよい。
【実施例6】
【0056】
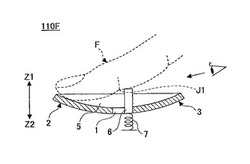
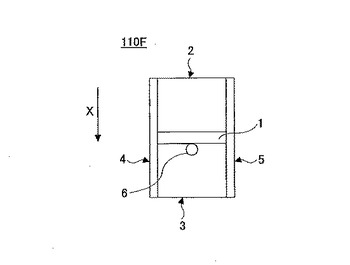
図19〜図21は、第6実施例に係る指紋読取装置110Fを示している。本実施例に係る指紋読取装置110Fは、指Fの走査面で指紋センサー1の近傍位置にボタン6を設けたものである。
【0057】
本実施例では、ボタン6は指Fの走査方向Xに対し指紋センサー1よりも後部(後方指走査面3)に配設されている。また、指紋センサー1の幅方向(図19における左右方向)に対し、その中央位置に設けられている。即ち、ボタン6の配設位置は、指紋センサー1の中心位置Oと略同一の位置とされている。
【0058】
また、ボタン6の下端部(各指走査面2,3の裏側)には弾性手段が設けられており、この弾性手段によりボタン6は上方(図中、矢印Z1方向)に向け弾性付勢されている。弾性手段としてはスプリング、プラスチック、ゴム等の適用が考えられるが、本実施例ではコイル状のバネ7を用いた例を示している。
【0059】
ボタン6は、押圧されることによりバネ7の弾性力に抗して図中Z2方向に変位する。この際、ボタン6の先端部は、指Fが走査する走査面と同一の高さとなるまで押下されるよう構成されている。また、押圧を解除することにより、ボタン6はバネ7の弾性復元力によりZ1方向に移動して元の位置に復元する。また、押圧されてない状態において、ボタン6の先端部はガイド側壁4,5の上面より若干突出するよう設定されている(図20参照)。
【0060】
このように、ボタン6の先端部をガイド側壁4,5の上面より突出させることにより、指紋読取装置110Fに向け指Fを下降させる際、下降位置の手前側からボタン6を確認することができ、ボタン6と第1関節J1との位置決めを行うことが可能となる。
【0061】
更に指Fを降下させると、図20に示すように指Fはボタン6と接触する。前記のように、ボタン6の形成位置は、指紋センサー1の中心位置Oと略対応している。よって、この時点で指Fの触覚により、指紋センサー1に対する指Fの位置を認識することが可能となる。
【0062】
このように、本実施例に係る110Fでは、指紋センサー1に対する指Fの第1関節J1の位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、ボタン6は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0063】
上記のように指Fの正しい位置が確認されると、図21に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。この際、ボタン6は走査面まで移動しているため、指Fの走査の邪魔になるようなことはない。
【0064】
更に、このボタン6を電気的なスイッチとし、アプリケーションボタンとしての機能も持たせることにより、指紋認証と同時に、アプリケーションの起動を行うことが可能となる。よって、この構成とした場合には、アプリケーション操作と認証操作とを連続して最短時間で行うことができる。
【0065】
尚、上記した実施例では走査面上のボタン6の配設位置を指紋センサー1よりも後部に配置したが、指紋センサー1よりも前方(前方指走査面2内)に配置する構成としてもよい。
【0066】
以上、本発明の好ましい実施例について詳述したが、本発明は上記した特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能なものである。
【符号の説明】
【0067】
1 指紋センサー
2 前方指走査面
3 後方指走査面
4,5 ガイド側壁
6 ボタン
7〜9 バネ
12,14 第1の凹凸部
13,15 第2の凹凸部
22,23 鏡面処理部
24,25 凸状突起
110A〜110E 指紋読取装置
F 指
FP 指紋
J1 第1関節
【技術分野】
【0001】
本発明は指紋読取装置、情報処理装置に係り、特に指紋センサー上で指をスライドさせるスライド型の指紋読取装置及び前記指紋読取装置を備えた情報処理装置に関するものである。
【背景技術】
【0002】
近年、PC(Personal Computer)やPDA(Personal Digital Assistants),携帯電話等の情報処理装置分野において、小型で安価な装置実現を可能にするスライド型或いはスウィープ型(以下スライド型)指紋センサーを備えた指紋読取装置が普及しつつある。
【0003】
図1A〜図1Cは、このようなスライド型指紋読取装置における指紋の読取範囲及び読取方法を説明するための図である。スライド型指紋読取装置においては、通常指Fの第一関節J1より先の部分(図中、矢印Lで示す部分)が読取範囲となるため、走査する指Fの第一関節部J1を指紋センサー1の中央部近傍に来るように指を走査面に正しく置く必要がある(図1B及び図1C参照)。
【0004】
図2Aに示すように、指Fの中心が指紋センサー1の中心位置Oを通るように矢印X方向に走査された場合、確実に指紋FPの読み取りを行うことができる。しかしながら、指紋の読み取り時には指紋センサー1は指Fに隠れてうまく第1関節J1を指紋センサー1に合わせることが困難である。
【0005】
よって、指紋センサー1の中心位置Oに位置するように第1関節J1を正しく位置決めすることができず、例えば図2Bに示すように第1関節J1の位置が指紋センサー1の中心位置Oに対して左右にずれたり、また図2Cに示すように第1関節J1の位置が指紋センサー1の中心位置Oよりも下になったりしてしまう。このような場合、読み取るべき範囲の画像が欠落して十分な画像が得られず、認証に失敗するという問題がある。
【0006】
このような問題を解決する方法として、指紋センサーが指に隠れないように、指紋センサーの真上より若干左右にずれた位置から指紋センサー近傍位置を目視し、指の第一関節部が指紋センサーの中央部に位置するよう指を置く方法が考えられる。しかしながら、この方法では、毎回指紋走査のために窮屈な姿勢を強いられるという問題が生じる。
【0007】
上記の問題を解決する方法として、特許文献1には、ガイド部を互いに略平行に並んだ1対の突条とし、このガイド部としての各突条を指の移動方向に延在するようにした構成が開示されている。更に、指紋を読み取る透明部材のすぐ後方に、ローラ及び指の移動方向(前後)に沿って指幅よりやや狭い突起状の2本のガイド部を設けることが記載されている。
【0008】
また特許文献2には、指紋センサーより少し離れた指紋走査方向前方に、被験者の指Fの有無を検知するスイッチを有する構成が開示されている。このスイッチは、第一関節より上の指の腹で押下する構成とされている。
【0009】
更に、特許文献3には、V字型溝の両側に一対のケースパッドを備え、これらケースパッドに指紋検出時の指の位置の指標としての役割を担わせ、スイープ型指紋センサーにより指紋を検出させようとするときは、指の先端に最も近い第1関節が、2つのケースパッド同士を結ぶ直線上に位置するように指をあてがうことが開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2004―240924号公報
【特許文献2】特開2004―272745号公報
【特許文献3】特開2005―259150号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上記の特許文献1に開示された方法では、指幅よりやや狭い突起状の2本のガイド部に指の腹部を均等に置くようにすることにより、指紋センサーの指走査方向に対して垂直方向中央部への最初の指置き位置への誘導はある程度可能になると思われる。しかしながら、指紋センサーの指走査方向に対しては、指紋センサー中央部近傍に指の第一関節部を正しく置く方法については開示されていない。
【0012】
また、特許文献2に開示された方法では、第一関節より上の指の腹で押下する形となり、指の背側だけから見て腹の中心で押せるとは限らない。このため、十分な指紋画像が得られず、認証に失敗するおそれがある。
【0013】
更に、特許文献3に開示された方法では、指を背側から見た場合、第一関節の位置は容易に判別できず、やはり十分な指紋画像が得られず正確な認証を得られないおそれがある。
【課題を解決するための手段】
【0014】
本発明は、上述した従来技術の問題を解決する、改良された有用な指紋読取装置及び前記指紋読取装置を備えた情報処理装置を提供することを総括的な目的とする。
【0015】
本発明のより詳細な目的は、窮屈な姿勢を強いられることなく指を適正読み取り位置に位置決めでき、正確な指紋認証を行いうる指紋読取装置及び前記指紋読取装置を備えた情報処理装置を提供することにある。
【0016】
この目的は、
スライド型の指紋センサーと、
指の第一関節部を前記指紋センサーの中央位置に位置決めさせる位置決め部を有し、
前記位置決め部は、
前記指紋センサーの配設位置に対し、指走査方向の前方位置に配設された前方指走査面と、
前記指紋センサーの配設位置に対し、前記指走査方向の後方位置に配設された後方指走査面と、
前記指紋センサーの前記指走査方向に対する前部または後部に、押下により前記指が走査する走査面まで下降すると共に、前記押下の解除により押下前の位置に弾性復元するボタンを有する、
指紋読取装置により解決することができる。
【発明の効果】
【0017】
上記の発明によれば、指紋センサーに対して適性位置に指を正しく位置決めすることができ、認証精度の向上を図ることができる。
【図面の簡単な説明】
【0018】
【図1A】指紋読取を行う範囲を説明するための図である。
【図1B】指紋読取時における指の走査方法を説明するための図である(その1)。
【図1C】指紋読取時における指の走査方法を説明するための図である(その2)。
【図2A】指紋センサーの位置と指の置き方を説明するための図である(適正時)。
【図2B】指紋センサーの位置と指の置き方を説明するための図である(不適正時その1)。
【図2C】指紋センサーの位置と指の置き方を説明するための図である(不適正時その2)。
【図3】第1実施例である指紋読取装置が設けられたパーソナルコンピュータを示す斜視図である。
【図4】指紋読取中における、図3に矢印Xで示す部分を拡大して示す図である。
【図5】指紋読取後における、図3に矢印Xで示す部分を拡大して示す図である。
【図6】本発明の第1実施例である指紋読取装置を示す平面図である。
【図7】本発明の第1実施例である指紋読取装置を示す断面図である。
【図8】本発明の第2実施例である指紋読取装置を示す平面図である。
【図9】本発明の第2実施例である指紋読取装置を示す断面図である。
【図10】本発明の第3実施例である指紋読取装置を示す平面図である。
【図11】本発明の第3実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図12】本発明の第3実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【図13】本発明の第4実施例である指紋読取装置を示す平面図である。
【図14】本発明の第4実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図15】本発明の第4実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【図16】本発明の第5実施例である指紋読取装置を示す平面図である。
【図17】本発明の第5実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図18】本発明の第5実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【図19】本発明の第6実施例である指紋読取装置を示す平面図である。
【図20】本発明の第6実施例である指紋読取装置を示しており、指を走査させる前の状態を示す断面図である。
【図21】本発明の第6実施例である指紋読取装置を示しており、指の走査中である状態を示す断面図である。
【発明を実施するための形態】
【0019】
次に、本発明の実施の形態について図面と共に説明する。
【実施例1】
【0020】
図3〜図5は、本発明の第1実施例である指紋読取装置110Aの適用例を示している。本実施例では、指紋読取装置110Aを情報処理装置の一例であるパーソナルコンピュータ100に搭載した例を示している。パーソナルコンピュータ100は、キーボード104及びフラットポイント105等を有した本体部101と、液晶ディスプレイ103等を搭載した蓋体部102とを有している。
【0021】
指紋読取装置110Aは、フラットポイント105の近傍位置に配設されている。この指紋読取装置110Aは指Fの指紋FPを読み取る装置であり、これにより予め指紋登録した人のみがパーソナルコンピュータ100を使用する構成とすることができ、セキュリティの向上を図ることができる。
【0022】
本実施例に係る指紋読取装置110Aは、指紋センサー1上で指Fをスライドさせることにより指紋FPを読み取るスライド型の指紋読取装置である。具体的には、図4に示すように、指紋読取装置110A上に指Fを置き、矢印X方向に指走査することにより指紋の読み取りを行う。この際、指走査する指Fの第一関節部J1を指紋センサー1の中心位置Oに位置決めして指Fを走査する必要があることは前述した通りである。
【0023】
第1実施例に係る指紋読取装置110Aは、図5及び図6に示すように、指紋センサー1、前方指走査面2、後方指走査面3、ガイド側壁4、及びガイド側壁5等により構成されている。
【0024】
前方指走査面2及び後方指走査面3は、指紋FPの読み取り時に指Fが走査する走査面を構成する。前方指走査面2は、指Fの走査方向(矢印X方向)に対し指紋センサー1の前方位置に配置されている。また後方指走査面3は、指Fの走査方向(矢印X方向)に対し指紋センサー1の後方位置に配置されている。
【0025】
ガイド側壁4,5は、指Fの走査面となる前方指走査面2及び後方指走査面3の両側位置に配設されている。このガイド側壁4,5の上面の高さは本体部101の表面と面一となるよう設定されている。
【0026】
これに対し、前記した前方指走査面2及び後方指走査面3は指Fの走査を円滑に行うために断面視で下に凸となる湾曲形状とされている(図7参照)。このため、相対的に、前方指走査面2及び後方指走査面3の表面の高さは、ガイド側壁4,5の上面の高さに対して低くなっている。よって、指Fを走査面(前方指走査面2及び後方指走査面3)上で指走査する際、指Fの両側はガイド側壁4,5にガイドされるため、円滑な指走査を行うことができる。
【0027】
ここで、本実施例に係る指紋読取装置110Aの前方指走査面2及び後方指走査面3の表面に注目する。本実施例に係る前方指走査面2の表面には第1の凹凸部12が形成されており、また後方指走査面3の表面には第2の凹凸部13が形成されている。
【0028】
この第1及び第2の凹凸部12,13は、各指走査面2,3の表面に対してシボ加工,ローレット加工,表面粗化加工を行うことにより形成することができる。また、各凹凸部12,13の表面の凹凸状態は同一ではなく、異なる凹凸状態となるよう設定されている。
【0029】
例えば、第1の凹凸部12の凹凸状態を粗く設定した場合、第2の凹凸部13の凹凸状態はこれよりも細かい凹凸となるよう設定されている。また、第1または第2の凹凸部12,13のうち、一方に対してのみ凹凸を設け、他方を平坦面(凹凸を形成しない面)とすることも可能である。
【0030】
この構成とすることにより、指Fの指紋FPが少し浮いた状態で指Fの腹が、前方指走査面2(第1の凹凸部12を有する)または後方指走査面3(第2の凹凸部13を有する)に接触すると、指Fの触覚により第1の凹凸部12と第2の凹凸部13との相違を識別することができる。
【0031】
このように指Fの触覚により第1の凹凸部12と第2の凹凸部13の識別が可能となることにより、指Fの第1関節J1の位置が指紋センサー1に対して上側か下側か、左側か右側かを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、第1の凹凸部12及び第2の凹凸部13は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0032】
上記のように指Fの正しい位置が確認されると、図7に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【実施例2】
【0033】
図8及び図9は、第2実施例である指紋読取装置110Bを示している。尚、第2実施例以降の各実施例で用いる図面(図8〜図33)において、第1実施例の説明に用いた図1〜図7に示した構成と対応する構成については同一符号を付して、その説明を適宜省略する。
【0034】
前記した第1実施例に係る指紋読取装置110Aは、前方指走査面2及び後方指走査面3の表面に凹凸部12,13を形成した構成とした。これに対して本実施例に係る指紋読取装置110Bでは、ガイド側壁4,5の上面で前方指走査面2と対向する位置に第1の凹凸部14を形成すると共に、ガイド側壁4,5の上面で後方指走査面3と対向する位置に第2の凹凸部15を形成した構成としている。
【0035】
この第1及び第2の凹凸部14,15は、各ガイド側壁4,5の上面に対してシボ加工,ローレット加工,表面粗化加工を行うことにより形成することができる。また、各凹凸部14,15の表面の凹凸状態は同一ではなく、異なる凹凸状態となるよう設定されている。
【0036】
例えば、第1の凹凸部14の凹凸状態を粗く設定した場合、第2の凹凸部15の凹凸状態はこれよりも細かい凹凸となるよう設定されている。また、第1または第2の凹凸部14,15のうち、一方に対してのみ凹凸を設け、他方を平坦面(凹凸を形成しない面)とすることも可能である。
【0037】
この構成とすることにより、指Fの指紋FPが少し浮いた状態で指Fの腹がガイド側壁4,5に接触すると、指Fの触覚により第1の凹凸部14と第2の凹凸部15との相違を識別することができる。
【0038】
このように指Fの触覚により第1の凹凸部14と第2の凹凸部15の識別が可能となることにより、指Fの第1関節J1の位置の指紋センサー1に対するずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、第1の凹凸部14及び第2の凹凸部15は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0039】
上記のように指Fの正しい位置が確認されると、図9に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0040】
尚、図9に示すように、第1の凹凸部14をガイド側壁4,5の上面ばかりでなく前方指走査面2と対向する内壁に形成し、第2の凹凸部15をガイド側壁4,5の前方指走査面3と対向する内壁に形成する構成としてもよい。これにより、指Fによる位置認識を更に精度よく行うことができる。
【実施例3】
【0041】
図10〜図12は、第3実施例に係る指紋読取装置110Cを示している。本実施例に係る指紋読取装置110Cは、ガイド側壁4,5の上面と指紋センサー1の配設位置と対向する位置に、凸状突起24,25を設けた構成としている。この凸状突起24,25のガイド側壁4,5の上面からの突出量H1(図11に示す)は、例えば1mm〜3mmに設定されている。
【0042】
この構成とすることにより、図11に示すように指Fの指紋FPが少し浮いた状態で指Fの腹が凸状突起24,25に接触すると、指Fの触覚により指紋センサー1に対する指Fの位置を認識することができる。
【0043】
このように、本実施例に係る110Cでは、指紋センサー1に対する指Fの第1関節J1の位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、凸状突起24,25は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0044】
上記のように指Fの正しい位置が確認されると、図12に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0045】
尚、上記した実施例ではガイド側壁4,5の指紋センサー1と対向する位置に凸状突起24,25を形成する構成を例に挙げて説明したが、指Fで認識できる構成であれば、凹状窪みを形成する構成としてもよい。
【実施例4】
【0046】
図13〜図15は、第4実施例に係る指紋読取装置110Dを示している。本実施例に係る指紋読取装置110Dは、ガイド側壁4,5の内壁で指紋センサー1の配設位置と対向する位置に内側突出部34,35を形成することにより、前方指走査面2及び後方指走査面3により構成される指Fの走査面に幅狭部を形成した構成としている。この内側突出部34,35のガイド側壁4,5の内壁からの突出量W1(図13に示す)は、例えば0.5mm〜2mmである。
【0047】
この構成とすることにより、図14に示す指Fの指紋FPが少し浮いた状態から図15に示すように指Fを指紋センサー1に向け下ろすと、指Fの腹が内側突出部34,35に接触し、この指Fの触覚により指紋センサー1に対する指Fの位置を認識することができる。
【0048】
このように指Fの触覚により指紋読取装置110Dに対する指Fの位置認識が可能となることにより、指Fの第1関節J1の指紋センサー1に対する位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、内側突出部34及び内側突出部35により構成される幅狭部は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0049】
上記のように指Fの正しい位置が確認されると、図15に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0050】
尚、上記した実施例ではガイド側壁4,5の指紋センサー1と対向する位置に凸状突起24,25を形成する構成を例に挙げて説明したが、指Fで認識できる構成であれば、凹状窪みを形成する構成としてもよい。
【実施例5】
【0051】
図16〜図18は、第5実施例に係る指紋読取装置110Eを示している。本実施例に係る指紋読取装置110Eは、前方指走査面2,3の表面を鏡面処理することにより鏡面処理部22,23を形成したものである。
【0052】
この構成とすることにより、指Fを鏡面処理部22及び鏡面処理部23の上にかざし、この時点で手前より各鏡面処理部22,23を覗くと(図17参照)、指Fが鏡面処理部22,23に映し出される(第1関節J1も映し出される)。よって、指紋の読み取りを行おうとする者は、鏡面処理部22,23に映し出される鏡像を見ながら、指紋センサー1に対して第1関節J1の位置決めを行うことができる。
【0053】
このように本実施例に係る指紋読取装置110Eは、鏡面処理部22,23に映し出される鏡像を見ることにより、第1関節J1の指紋センサー1に対する位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、鏡面処理部22,23は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0054】
上記のように指Fの正しい位置が確認されると、図21に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。
【0055】
尚、上記した実施例では2,3の双方の表面に鏡面処理部22,23を設けた構成を示したが、指Fを視認できればいずれか一方にのみ鏡面処理部を設けた構成としてもよい。
【実施例6】
【0056】
図19〜図21は、第6実施例に係る指紋読取装置110Fを示している。本実施例に係る指紋読取装置110Fは、指Fの走査面で指紋センサー1の近傍位置にボタン6を設けたものである。
【0057】
本実施例では、ボタン6は指Fの走査方向Xに対し指紋センサー1よりも後部(後方指走査面3)に配設されている。また、指紋センサー1の幅方向(図19における左右方向)に対し、その中央位置に設けられている。即ち、ボタン6の配設位置は、指紋センサー1の中心位置Oと略同一の位置とされている。
【0058】
また、ボタン6の下端部(各指走査面2,3の裏側)には弾性手段が設けられており、この弾性手段によりボタン6は上方(図中、矢印Z1方向)に向け弾性付勢されている。弾性手段としてはスプリング、プラスチック、ゴム等の適用が考えられるが、本実施例ではコイル状のバネ7を用いた例を示している。
【0059】
ボタン6は、押圧されることによりバネ7の弾性力に抗して図中Z2方向に変位する。この際、ボタン6の先端部は、指Fが走査する走査面と同一の高さとなるまで押下されるよう構成されている。また、押圧を解除することにより、ボタン6はバネ7の弾性復元力によりZ1方向に移動して元の位置に復元する。また、押圧されてない状態において、ボタン6の先端部はガイド側壁4,5の上面より若干突出するよう設定されている(図20参照)。
【0060】
このように、ボタン6の先端部をガイド側壁4,5の上面より突出させることにより、指紋読取装置110Fに向け指Fを下降させる際、下降位置の手前側からボタン6を確認することができ、ボタン6と第1関節J1との位置決めを行うことが可能となる。
【0061】
更に指Fを降下させると、図20に示すように指Fはボタン6と接触する。前記のように、ボタン6の形成位置は、指紋センサー1の中心位置Oと略対応している。よって、この時点で指Fの触覚により、指紋センサー1に対する指Fの位置を認識することが可能となる。
【0062】
このように、本実施例に係る110Fでは、指紋センサー1に対する指Fの第1関節J1の位置ずれを認識することができる。これにより、指紋センサー1が指Fにより隠れた状態であっても、第1関節J1が指紋センサー1の中心位置Oに位置するように調整することが可能となる。即ち、ボタン6は、指Fの第1関節J1を指紋センサー1の中心位置Oに位置決めさせる位置決め装置として機能する。
【0063】
上記のように指Fの正しい位置が確認されると、図21に示すように第1関節J1を指紋センサー1の中心位置Oに押し付け、その後に第1関節J1より上の指Fの腹の部分を指紋センサー1に押し付けながら図中矢印X方向に一定速度で指走査することで正しい指紋FPの読み取りを行うことができる。この際、ボタン6は走査面まで移動しているため、指Fの走査の邪魔になるようなことはない。
【0064】
更に、このボタン6を電気的なスイッチとし、アプリケーションボタンとしての機能も持たせることにより、指紋認証と同時に、アプリケーションの起動を行うことが可能となる。よって、この構成とした場合には、アプリケーション操作と認証操作とを連続して最短時間で行うことができる。
【0065】
尚、上記した実施例では走査面上のボタン6の配設位置を指紋センサー1よりも後部に配置したが、指紋センサー1よりも前方(前方指走査面2内)に配置する構成としてもよい。
【0066】
以上、本発明の好ましい実施例について詳述したが、本発明は上記した特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能なものである。
【符号の説明】
【0067】
1 指紋センサー
2 前方指走査面
3 後方指走査面
4,5 ガイド側壁
6 ボタン
7〜9 バネ
12,14 第1の凹凸部
13,15 第2の凹凸部
22,23 鏡面処理部
24,25 凸状突起
110A〜110E 指紋読取装置
F 指
FP 指紋
J1 第1関節
【特許請求の範囲】
【請求項1】
スライド型の指紋センサーと、
指の第一関節部を前記指紋センサーの中央位置に位置決めさせる位置決め部を有し、
前記位置決め部は、
前記指紋センサーの配設位置に対し、指走査方向の前方位置に配設された前方指走査面と、
前記指紋センサーの配設位置に対し、前記指走査方向の後方位置に配設された後方指走査面と、
前記指紋センサーの前記指走査方向に対する前部または後部に、押下により前記指が走査する走査面まで下降すると共に、前記押下の解除により押下前の位置に弾性復元するボタンを有する、
指紋読取装置。
【請求項2】
請求項1の指紋読取装置を備えた情報処理装置。
【請求項1】
スライド型の指紋センサーと、
指の第一関節部を前記指紋センサーの中央位置に位置決めさせる位置決め部を有し、
前記位置決め部は、
前記指紋センサーの配設位置に対し、指走査方向の前方位置に配設された前方指走査面と、
前記指紋センサーの配設位置に対し、前記指走査方向の後方位置に配設された後方指走査面と、
前記指紋センサーの前記指走査方向に対する前部または後部に、押下により前記指が走査する走査面まで下降すると共に、前記押下の解除により押下前の位置に弾性復元するボタンを有する、
指紋読取装置。
【請求項2】
請求項1の指紋読取装置を備えた情報処理装置。
【図1A】


【図1B】

【図1C】
【図3】
【図4】

【図5】
【図8】
【図10】
【図11】
【図14】

【図15】
【図16】
【図17】

【図18】
【図19】
【図20】

【図2A】
【図2B】
【図2C】

【図6】
【図7】

【図9】
【図12】

【図13】
【図21】

【図1B】
【図1C】
【図3】
【図4】
【図5】
【図8】
【図10】
【図11】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2A】
【図2B】
【図2C】
【図6】
【図7】
【図9】
【図12】
【図13】
【図21】
【公開番号】特開2013−33510(P2013−33510A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2012−242017(P2012−242017)
【出願日】平成24年11月1日(2012.11.1)
【分割の表示】特願2012−15401(P2012−15401)の分割
【原出願日】平成20年3月31日(2008.3.31)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成24年11月1日(2012.11.1)
【分割の表示】特願2012−15401(P2012−15401)の分割
【原出願日】平成20年3月31日(2008.3.31)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]