
振動アクチュエータ、光走査装置、光学的情報読取装置及び振動アクチュエータの製造方法
【課題】 振動アクチュエータの小型化と生産性とを両立させる。
【解決手段】 振動アクチュエータにおいて、1本のねじり棒バネ30により、ミラー3と永久磁石43を固定した可動子であるフレーム42を、基板に対して回転可能に片持ち支持する。ねじり棒バネ30は、可動子の回転軸に垂直な方向の断面形状は、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が上記第1の方向と平行でない第2の方向である第2の部分とを有する形状、例えばH字型とする。また、永久磁石43と対向させて、コイル45とヨーク46とを備えたステータ41を配置する。配線47を介してコイル45に所定のパルスを通電することにより、永久磁石43に力を加え、ねじり棒バネ30をねじって上記可動子を所定の回転角で往復回転駆動することができる。
【解決手段】 振動アクチュエータにおいて、1本のねじり棒バネ30により、ミラー3と永久磁石43を固定した可動子であるフレーム42を、基板に対して回転可能に片持ち支持する。ねじり棒バネ30は、可動子の回転軸に垂直な方向の断面形状は、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が上記第1の方向と平行でない第2の方向である第2の部分とを有する形状、例えばH字型とする。また、永久磁石43と対向させて、コイル45とヨーク46とを備えたステータ41を配置する。配線47を介してコイル45に所定のパルスを通電することにより、永久磁石43に力を加え、ねじり棒バネ30をねじって上記可動子を所定の回転角で往復回転駆動することができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、可動子を所定の回転軸の回りに所定の回転角で往復回転運動させる振動アクチュエータ、対象を光により走査する光走査装置、このような光走査装置を備え、光反射率が周囲と異なるモジュールが配列されたコード記号により示される情報を読み取る光学的情報読取装置、および、上記のような振動アクチュエータの製造方法に関する。
【背景技術】
【0002】
光学式情報読取装置として、商品の品名や価格等の情報を示すバーコードを読み取るバーコードリーダが、流通業界や小売業界で広く使用されている。このようなバーコードリーダは、携帯型と定置型に大別され、携帯型のバーコードリーダでは、小型化、駆動電圧の低電圧化、高耐久性が求められる。
【0003】
携帯型のバーコードリーダの中で、光ビーム走査方式と称されるバーコードリーダは、バーコードスキャナとも呼ばれ、レーザダイオード等の光源によって出射されるレーザ光をビーム状にし、この光ビームを反射するミラーを回転あるいは振動させることで光ビームを偏向し、バーコードを走査する。そして、バーコードからの反射光を集光し、受光センサで受光して電気信号に変換する。この得られた電気信号をA/D変換してコード化し、バーコード読取情報として出力する。
【0004】
このようなバーコードリーダにおいては、バーコードを走査するビームを出力するモジュールが光走査装置に該当し、そのうち、反射用のミラーを回転あるいは振動させる機構がアクチュエータに該当する。
そして、この反射用ミラーの振動機構の小型化に関する技術として、例えば特許文献1に記載のものが知られている。
特許文献1には、携帯型のバーコードリーダにおいて、2本以上のねじり棒バネによりミラーを設けた可動子を片持ち支持すると共に、それらのねじり棒バネを、可動子が回転するときに変位するねじれ方向以外への変位を阻害する配置で並列して設けることにより、装置を小型化し、かつ読取対象を確実に走査可能とすることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−170429号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載のバーコードリーダにおいては、装置を製造する際に、ねじり棒バネの固定に高い位置精度が要求されるという問題があった。これは、特許文献1に記載のバーコードリーダにおいては、物理的な実体としての可動子の回転軸が存在せず、回転軸の位置は、ねじり棒バネの相対的な向きや位置関係によって決まるため、これらがずれると、それに応じて回転軸の位置もずれ、適切な走査が行えなくなってしまうためである。また、同様な理由から、ねじり棒バネ自体の寸法精度も、高いものが必要であった。
【0007】
従って、特許文献1に記載の構成では、大量生産の際の生産性の点で不満があった。
また、このような問題は、バーコードリーダ以外の装置に同様な振動機構を適用しようとする場合にも、同様に発生するものである。
この発明は、このような背景に鑑みてなされたものであり、可動子を所定の回転角で往復回転運動させる振動アクチュエータ及び、これを用いた光走査装置及び光学的情報読取装置において、小型化と生産性とを両立させることを目的とする。
【課題を解決するための手段】
【0008】
この発明は、上記の目的を達成するため、振動アクチュエータにおいて、可動子と、上記可動子を所定の回転角で往復回転駆動する駆動部と、一方の端部に上記可動子が固定され、上記可動子を回転可能に支持する1本のねじり棒バネとを設け、上記ねじり棒バネを、上記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が上記第1の方向と平行でない第2の方向である第2の部分とを有する形状とし、上記可動子が上記ねじり棒バネにより支持されるようにしたものである。
【0009】
このような振動アクチュエータの上記ねじり棒バネにおいて、上記第1の方向と上記第2の方向とが互いに垂直になるようにするとよい。
さらに、上記ねじり棒バネは、上記可動子の回転軸に垂直な方向の断面がH字型であるとよい。
あるいは、上記ねじり棒バネを、上記可動子の回転軸に垂直な方向の断面が、長手方向が上記第1の方向とも上記第2の方向とも平行でない第3の方向である第3の部分をも有する形状としてもよい。
【0010】
また、上記の各振動アクチュエータにおいて、上記ねじり棒バネの材質を弾性体とし、成形により形成されたものとするとよい。
さらに、上記可動子の材質を樹脂とし、上記ねじり棒バネと上記可動子とを、二色成形により一体に成形されたものとするとよい。
さらに、上記ねじり棒バネの、上記一方の端部と反対側の他方の端部に、上記可動子の回転軸に垂直な方向の断面積が上記ねじり棒バネより大きい部材を設け、上記ねじり棒バネとその部材とが成形により一体に形成するようにするとよい。
【0011】
また、この発明の光走査装置は、上記のいずれかの振動アクチュエータと、光を出射する発光部とを備え、上記可動子に、上記発光部から出射された光を反射するミラーを備え、上記発光部が出射して上記ミラーで反射された光により対象を走査するようにしたものである。
また、この発明の光学的情報読取装置は、光反射率が周囲と異なるモジュールが配列されたコード記号により示される情報を読み取る光学的情報読取装置において、上記の光走査装置を設けたものである。
【0012】
また、この発明の振動アクチュエータの製造方法は、可動子と、上記可動子を所定の回転角で往復回転駆動する駆動部と、一方の端部に上記可動子が固定され上記可動子を回転可能に支持する1本のねじり棒バネとを備えた振動アクチュエータの製造方法において、上記ねじり棒バネの材質を弾性体とし、上記ねじり棒バネの上記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が上記第1の方向と平行でない第2の方向である第2の部分とを有する形状となるように、上記ねじり棒バネと上記可動子とを二色成形により一体に成形する成形工程を備えることを特徴とする振動アクチュエータの製造方法。
【0013】
このような振動アクチュエータの製造方法において、上記成形工程において、上記ねじり棒バネの、上記一方の端部と反対側の他方の端部に、上記可動子の回転軸に垂直な方向の断面積が上記ねじり棒バネより大きい部材を、成形により上記ねじり棒バネと一体に形成し、さらに、上記断面積が大きい部材を基板に接着することにより上記ねじり棒バネをその基板に固定する固定工程をも設けるとよい。
【発明の効果】
【0014】
この発明による振動アクチュエータ、光走査装置、光学的情報読取装置及び振動アクチュエータの製造方法によれば、装置の小型化と生産性とを両立させることができる。
【図面の簡単な説明】
【0015】
【図1】この発明の光学的情報読取装置の一実施形態であるバーコードスキャナの全体構成を示す斜視図である。
【図2】図1に示したバーコードスキャナが備える光学系の模式図である。
【図3】図1に示した光学系が備える振動アクチュエータの斜視図である。
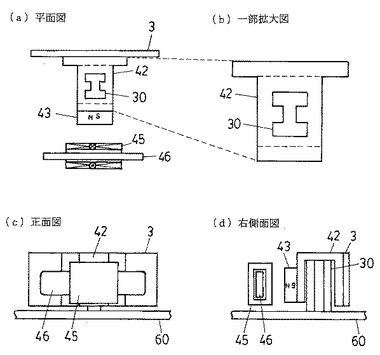
【図4】図3に示した振動アクチュエータの(a)平面図、(b)その一部拡大図、(c)正面図、および(d)右側面図である。
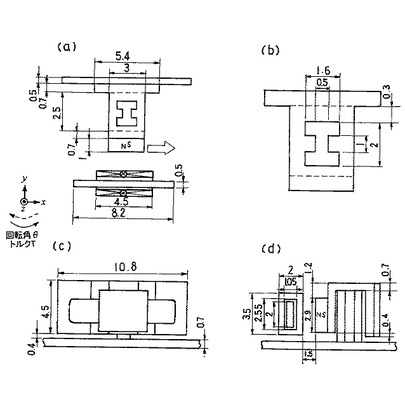
【図5】この発明の振動アクチュエータの一実施例の寸法を示す、図4と対応する図である。
【図6】図5に示した振動アクチュエータについての、ねじり棒バネ部分の応力解析結果を示す図である。
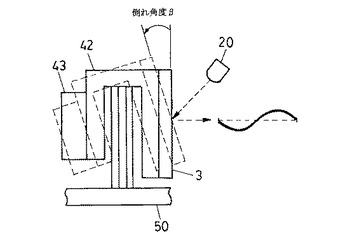
【図7】振動アクチュエータにおけるミラーの倒れ角度と走査ラインの関係についての説明図である。
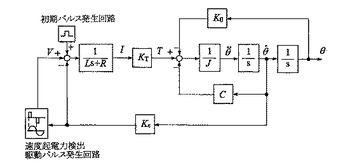
【図8】図5に示した振動アクチュエータのブロック線図である。
【図9】この発明の実施形態の変形例におけるねじり棒バネの構成を示す、図4(b)と対応する図である。
【図10】そのさらに別の例を示す図である。
【図11】そのさらに別の例を示す図である。
【図12】そのさらに別の例を示す図である。
【図13】そのさらに別の例を示す図である。
【図14】この発明の実施形態の別の変形例におけるねじり棒バネの構成を示す、図4(d)と対応する図である。
【発明を実施するための形態】
【0016】
〔実施形態:図1乃至図4〕
まず、この発明の光学的情報読取装置の一実施形態であるバーコードリーダについて、図1乃至図4を参照しながら説明する。このバーコードリーダは、この発明の一実施形態である光走査装置及び振動アクチュエータを備えるものである。
図1は、そのバーコードリーダの全体構成を示す斜視図である。図2は、そのバーコードリーダが備える光学系の模式図である。図3は、図1に示した光学系が備える振動アクチュエータの斜視図である。図4は、図3に示した振動アクチュエータの(a)平面図、(b)その一部拡大図、(c)正面図、および(d)右側面図である。
【0017】
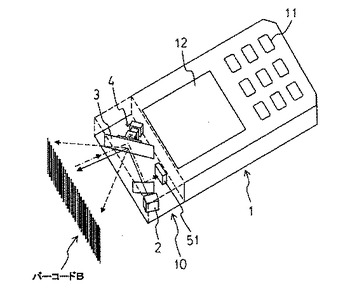
この発明の一実施形態であるバーコードリーダ1は、光反射率が周囲と異なるモジュールである白バーと黒バーが配列されたコード記号であるバーコードBにより示される情報を読み取る携帯型の光学的情報読取装置である。
そして、操作部11及び表示部12を備え、操作部11によりコード記号の読み取り指示その他のユーザからの操作を受け付けると共に、表示部12により、読み取り結果の表示や走査受付のための画面の表示を行う。
【0018】
また、バーコードリーダ1は、コード記号の読み取りのための構成として、光学モジュール10を備える。そして、この光学モジュール10が備える発光部2から出射されてミラー3で反射される光を、ミラー3を所定の回転角で往復回転動作させることで偏向して、読取対象のバーコードBを走査する。また、バーコードBを走査した光の反射光を受光部5で受光して、その光を光電変換した信号から、バーコードBが示す情報を読み取る。
【0019】
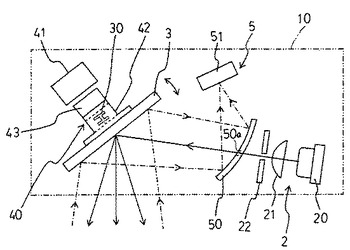
より具体的には、光学モジュール10は、光走査のための構成として、発光部2と、発光部2から出射された光を反射するミラー3と、そのミラー3の角度を変えるミラー駆動部4とを備え、これらにより光走査装置を構成する。
このうち発光部2においては、半導体レーザ(LD)等で構成される光源20と、光源20から所定の放射角で放射された光を集光するレンズ21と、レンズ21で集光された光を絞るアパーチャ22が筐体に取り付けられ、発光部2は、光源20から放射された光を集光または平行光化したビーム光を出射する。なお、このビーム光は、後述する反射ミラー50に設けた貫通穴50aを通って出射する。
【0020】
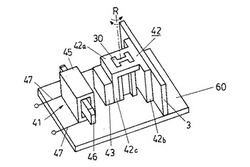
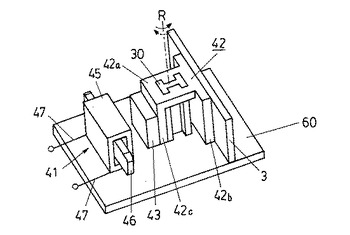
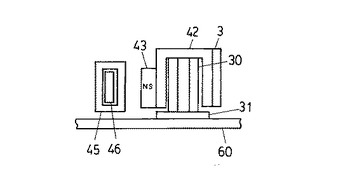
また、ミラー駆動部4は、可動子40とステータ41を備える振動アクチュエータである。そして、可動子40は、ミラー3と、ミラー3が取り付けられたフレーム42と、フレーム42に取り付けられた永久磁石43とを備え、1本のねじり棒バネ30で、図3及び図4(c),(d)に表われる金属製の基板60(図1においては底面側に位置する)上に回転可能に支持される構成である。なお、これらの図において、基板60は、ミラー駆動部4の近傍の部分のみを示している。また、図4(a)及び(b)においては基板の図示は省略している。
【0021】
これらのうちミラー3は、本例ではガラスで構成されるが、金属または樹脂等で構成しても良い。
また、フレーム42は、本例では硬質の樹脂であるポリカーボネートで構成され、平板状の支持部42aの一方の端部に、支持部42aに対して垂直な方向に突出するミラー取付部42bが一体に形成される。また、支持部42aの他方の端部には、支持部42aに対して垂直で、ミラー取付部42bと同じ方向に突出するマグネット取付部42cが一体に形成される。そして、フレーム42の前面側となるミラー取付部42bにミラー3が固着され、背面側となるマグネット取付部42cに永久磁石43が固着される。
【0022】
そして、支持部42aには、ねじり棒バネ30が、その上面に達するまで貫通して埋め込まれた状態となっており、このことにより、支持部42aはねじり棒バネ30の一端部と一体化し、ねじり棒バネ30に固定されている。
また、ステータ41は、図3及び図4に表われるように、不図示のボビンに巻かれたコイル45に、ヨーク46を貫通させて、基板60上に固定した構成である。また、コイル45からは、給電のために一対の配線47,47が引き出されている。なお、図4(a)において、ステータ41は、その中心軸を通り基板60に平行な平面における断面を示している。また、図3以外の図において配線47の図示は省略している。
受光部5は、読取対象を走査した光の反射光であってミラー3で反射された光を反射する反射ミラー50と、反射ミラー50で反射された光を受光し、光電変換して出力するフォトダイオード(PD)51とを備える。
【0023】
次に、ねじり棒バネ30の構成及び機能について、より詳細に説明する。
まず、ねじり棒バネ30の材質は、弾性を有する樹脂による弾性体であり、成形によって形成することができる。具体的には、シリコンゴム(例えば信越化学工業社製の信越シリコーン(商品名)KE−2095−60)を用いることができる。
また、ねじり棒バネ30と可動子40のフレーム42とは、二色成形により一体に成形して形成したものである。従って、ねじり棒バネ30とフレーム42とは、容易に分離することはない。また、ねじり棒バネ30と基板60とは、接着により固着する。
ねじり棒バネ30は、以上の構成により、フレーム42を含む可動子40を基板60に対して片持ち支持することができる。
【0024】
ところで、可動子40を片持ち支持する場合、1本の平板状のねじり棒バネで可動子を片持ち支持する構造では、ねじり棒バネのねじれと曲げの2つの振動モードがあるため、ミラーで反射された光が2次元方向(所望の走査ラインから外れる方向)にぶれる欠点がある。
【0025】
しかし、ミラー駆動部4において、ねじり棒バネ30は、図3に示した可動子40の回転軸Rに垂直な方向の断面が、少なくとも、長手方向がミラーに平行な第1の方向である部分(H字の縦線に当たる部分)2箇所と、長手方向がミラーに垂直な第2の方向である部分(H字の横線に当たる部分)1箇所とを有するH字型の形状である。
従って、H字の縦線に当たる部分は、ミラー3の面に対して垂直な方向に比較して、平行な方向には撓みにくく、ミラー3の面に対して平行な方向への変形が規制される。また、H字の横線に当たる部分は、ミラー3の面に対して平行な方向に比較して、垂直な方向には撓みにくく、ミラー3の面に対して垂直な方向への変形が規制される。
【0026】
このため、H字型の断面を有するねじり棒バネ30全体では、回転方向であるねじれ方向の剛性は小さく、かつ、他の曲げ方向の剛性は大きくなり、ねじれ方向以外への変形を抑制することができる。これにより、ねじり棒バネ30の中心に回転軸Rが形成され、コイル45に通電することで、可動子40は、回転軸Rを中心に、コイル45と永久磁石43との間に作用する力と、ねじり棒バネ30のねじれにより生じるバネ力とが釣り合う位置まで回転する。また、可動子40の回転方向は、コイル45に流れる電流の向きに依存するので、コイル45に、正負が所定の周期で逆転するパルス電圧を印加することで、可動子40を、所定の回転角で往復回転駆動することができる。
【0027】
一方、以上のねじり棒バネ30は、全体として1本のバネであるため、複数の部品の位置合わせをする必要がなく、ミラー駆動部4の製造工程の工数も少ないものとすることができると共に、部品点数も削減することができる。
さらに、材質を樹脂とすることにより、成形で寸法誤差の少ない部品を容易に量産することができ、この点でも生産性の向上を図ることができる。
【0028】
また、可動子40を構成するフレーム42も樹脂製としているため、ねじり棒バネ30と可動子40とを、二色成形により一体に成形することができ、このことにより、可動子40とねじり棒バネ30とを、寸法誤差を少なくかつ信頼性よく容易に固定することができる。フレーム42とねじり棒バネ30とを一体の部品と捉えることができるので、この点でも部品点数を削減することができる。
【0029】
また、ミラー駆動部4を製造する際には、この二色成形した部品のフレーム42にミラー3や永久磁石43を接着等により固定した後で単にねじり棒バネ30の部分を基板60上に接着等により固定すればよいので、組み立て作業や他の部品との位置合わせを容易に行うことができる。
特に、バーコードリーダに適用する場合、フレーム42のサイズは、1辺が1〜2ミリメートル程度とかなり小さいものとすることが要求されるため、このような小サイズの部品を効率よく量産するためには、以上の構成が大いに有用である。
【0030】
〔実施例:図5乃至図8〕
次に、上述した実施形態におけるミラー駆動部4を構成する振動アクチュエータの具体的な実施例について、図5乃至図8を参照しながら説明する。
図5は、図4と対応する図であり、この実施例における振動アクチュエータの各部の寸法を示す。単位はミリメートルである。
また、ねじり棒バネ30の材質は、ヤング率3.39MPa(メガパスカル)のシリコンゴム(信越化学工業社製の信越シリコーン(商品名)KE−2095−60)とし、フレーム42の材質はポリカーボネートとした。
【0031】
そして、振動アクチュエータのその他の各部の仕様は、以下の表1に示す通りとした。
【表1】

【0032】
発明者は、以上のような構成の振動アクチュエータにつき、三次元有限要素法電磁界解析ソフトMaxwellを用いて、三次元直交座標系で静磁界解析を行った。表2にその解析条件を示す。
【表2】
【0033】
解析の結果、回転角θは図5に示すz軸を基準とする右ねじの向きを正として、起磁力NI=17.6A,回転角θ=0degreeのとき、トルクT=16.7μN・mであった。また,NI=17.6A,θ=13.5degreeのとき、トルクT=11.6μN・mであった。NI=0A,θ=13.5degreeのとき、トルクT=−2.04μN・mであるので、以下の数1を用いて磁気ばね定数Kmsを求めると8.66μN・m/radであった。この磁気ばね定数Kmsは,振動アクチュエータの固有振動数を導出する際に使用する。
【0034】
【数1】
ただし、T:トルク(N・m),θ:ミラーの回転角(rad)
【0035】
また、振動アクチュエータの起動する早さを調べるために、指標として機械的時定数Tmを求める。機械的時定数Tmおよびトルク定数KTは以下の数2と数3より求めることができる。
【数2】
ただし、J:慣性モーメント(kg・m2),R:コイル抵抗(Ω),
Ke:逆起電力定数(V・s/rad),KT:トルク定数(N・m/A),
【数3】
ただし、I:電流(A)
【0036】
また、トルク−電流特性は、θ=0degree,I=16mAにおいてトルクT=16.7μN・mであった。数3を用いたところ、トルク定数KT=1.04mN・m/Aとなった。逆起電力定数とトルク定数はKe≒KTとみなせるため,数2より機械的時定数はTm=192msとなった。
【0037】
また、図5に示すx方向およびy方向に発生する振動アクチュエータの静推力−回転角特性は、以下の通りとなった。すなわち、NI=17.6A,θ=13.5degreeのとき、x方向の静推力Fx=4.9mNであった。振動アクチュエータが駆動していない状態であるNI=0A,θ=0degreeのときでは、y方向の静推力として、吸引力Fy=19.5mNが発生していた。また、NI=17.6A,θ=13.5degreeのとき、Fy=21.5mNであった。ここで求めた推力を、ねじり棒ばねの応力解析を行う際に利用する。
【0038】
次に、表3に示す応力解析条件に基づき、Solidworks Simulationを用いて三次元直交座標系での静解析を行った。要素数は約15万個とした。
【表3】
【0039】
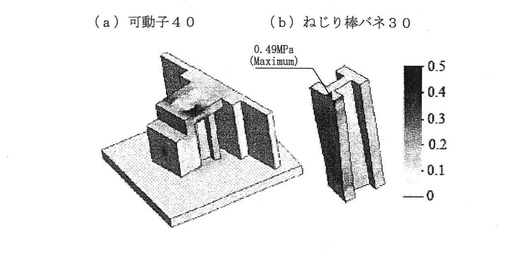
図6に、(a)可動子40と、(b)そのねじり棒バネ30部分の応力解析結果を示す。
永久磁石43の中央部分にFx=11mN,Fy=21.5mNを印加したときに、ミラーの回転角はθ=13.5degreeとなる。ねじり棒バネ30を構成するシリコンゴムに発生する最大応力はσm=0.49MPaで、ねじり棒バネ30の端部に発生した。シリコンゴムの降伏強さは4.25MPaであるために,安全率SはS=8.7となり、実使用にも耐えられる耐久性を有している。
【0040】
ここで,振動アクチュエータの運動方程式は数4となる。
【数4】
ただし、C:減衰定数(N・m・s/rad),K:ばね定数(N・m/rad)
【0041】
数4より固有振動数f0は下記数5となる。
【数5】
ただし、Kθ:ねじり方向のばね定数(N・m/rad),
Kms:磁気ばね定数(N・m/rad)
【0042】
以上の解析結果より,ねじり方向のばね定数Kθ=135μN・m/radであり、数5を用いて固有振動数f0を求めると49.5Hzであった。これは目標走査周波数50±5Hzの範囲内である。
【0043】
また、図7に、ミラーの倒れ角度βと走査ラインの様子を示した。
倒れ角度βが大きい場合や、倒れ方向の固有振動数とねじり方向の固有振動数が近い値をとる場合には、直線状の走査ラインが照射されない。よって倒れ方向の特性を考慮する必要がある。
上記の解析結果より倒れ角度を求めると、β=0.21degreeとなった。この値であれば、実使用の際を想定した走査原点から150mmの距離での走査ラインの曲がりは1mmであり、使用時には問題のない値となった。
【0044】
また、倒れ方向の固有振動数fβを、数6と数7を用いて求める。
【数6】
ただし、Kβ:倒れ方向のばね定数(N・m/rad),
Jβ:倒れ方向の慣性モーメント(kg・m2)
【数7】
ただし、β:ミラーの倒れ角度
【0045】
解析結果より求めた,倒れ方向の慣性モーメントJβ=2.13g・mm2、ミラーの倒れ角度β=0.21degree、及び倒れ方向のばね定数Kβ=13.2mN・m/radを用いて倒れ方向の固有振動数fβを算出すると396Hzであった。振動アクチュエータのねじり方向の固有振動数f0は49.5Hzであるので、両固有振動数は8倍程度離れた値をとっているため駆動の際には問題のない結果となった。
【0046】
次に、図8に振動アクチュエータのブロック線図を示す。
図8のブロック線図を用いて解析ソフトMatlab Simulinkで解析を行い、本アクチュエータが目標回転角で駆動することを確認した。また、目標回転角に達するまでの時間を求めた。なお、駆動の際には、矩形波の駆動電圧V=2.2Vを逆起電力が0Vのときに印加するようにした。最初に印加する電圧は、起動を早くさせるためにパルス幅の大きい電圧を印加した。
解析の結果、この条件で、振動アクチュエータは回転角をθ=±13.5degreeとさせることが可能であった。また,目標回転角θ=13.5degreeとなるまでに要する時間は36.9msであり,光スキャナを搭載した携帯端末をすばやく起動させることができる。
【0047】
〔変形例:図9乃至図14〕
次に、上述した実施形態の変形例について説明する。
まず、ねじり棒バネ30の形状について、上述した実施形態では、可動子40の回転軸Rに垂直な方向の断面がH字型である例について説明した。しかしながら、ねじり棒バネ30の断面形状は、これに限られない。可動子40の回転軸Rに垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向がその第1の方向と平行でない第2の方向である第2の部分とを有する形状であれば、上述した実施形態の場合と同様、コイル45への通電により、基板60に垂直な回転軸R(位置はねじり棒バネ30の形状によって異なる)を中心に、可動子40を回転させることができる。
【0048】
これは、上記のような第1の部分と第2の部分とを備えることにより、ねじり棒バネ30を、第1の部分では第1の方向に撓みにくく、第2の部分では第1の方向と異なる第2の方向に撓みにくい性質とすることができるので、全体として、ねじり棒バネ30を、回転方向であるねじれ方向の剛性は小さく、かつ、他の曲げ方向の剛性は大きいものとし、ねじれ方向以外への変形を抑制することができるためである。
【0049】
図9乃至図13に、このような条件を満たすねじり棒バネの形状の例を示す。これらの図は、図4(b)と対応する図面で、これらの図に表われるねじり棒バネの断面形状のみを変形したものである。これらの図において、30A〜30Eがそれぞれねじり棒バネを示し、これらの符号に添え字1〜3を付けて示す部分が、各ねじり棒バネにおける第1〜第3の部分を示す。
【0050】
図9(T字型)及び図10(十字型)は、第1の方向(第1の部分の長手方向)と第2の方向(第2の部分の長手方向)とが互いに垂直な例である。このような構成であると、ねじれ方向の剛性に比べて他の曲げ方向の剛性を大きくし易く、好ましい特性のねじり棒バネが得られ易い。
しかし、これに限られることはなく、図11に示すように、第1の方向と第2の方向とは垂直でなくてよい。また、第1の部分30C1と第2の部分30C2とが端部で結合していてもよい。
【0051】
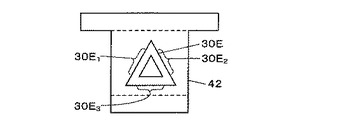
また、図12(Y字型)及び図13(中空三角柱型)に示すように、長手方向が第1の方向とも第2の方向とも平行でない第3の方向である第3の部分をも有するようにしてもよい。このような構成であっても、第3の部分では第1の方向とも第2の方向とも異なる第3の方向に撓みにくい性質とすることができるので、全体として、ねじり棒バネ30を、回転方向であるねじれ方向の剛性は小さく、かつ、他の曲げ方向の剛性は大きいものとし、ねじれ方向以外への変形を抑制することができるためである。
ねじり棒バネ30の形状については、図9乃至図13に示した形状以外にも、さらに種々のバリエーションが考えられる。
【0052】
また、別の変形として、ねじり棒バネ30と基板60とをより信頼性よく固定するため、ねじり棒バネ30の基板60側の端部に、可動子40の回転軸Rに垂直な方向の断面積がねじり棒バネ30より大きい部材を、ねじり棒バネ30と一体に設けることが考えられる。
図14に、このような部材を設けた例を示す。図14は、図4(d)と対応する図である。
上記の断面積が大きい部材は、図14に、符号31で示されるものであり、例えば、フレーム42とねじり棒バネ30とを二色成形する際に、フレーム42と同じ材質により、フレーム42と同時に形成することが考えられる。
【0053】
そして、この部材31と基板60とを接着等により固定することにより、接触面積を大きく取ることができるため、信頼性のよい固定が可能となる。また、ねじり棒バネ30と部材31との間との間も、二色成形により信頼性よく固定できる。従って、全体として、ねじり棒バネ30と基板60とを、信頼性よく固定できる。
【0054】
なお、部材31に当たる部分を、ねじり棒バネ30と同じ材質で形成することも可能である。しかしこの場合、部材31も弾性を有することになるため、ねじり棒バネ30と部材31との境界で急激に断面積が広がると、その部分に応力が集中し、破損し易くなることが考えられる。従ってこの場合、ねじり棒バネ30のうち基板60に近い部分について、徐々に断面積を増す構成とすることが好ましい。
【0055】
また、さらに他の変形として、二色成形と比べて信頼性は低下するが、ねじり棒バネ30とフレーム42との固定を、接着や嵌合によって行うことも考えられる。この場合、フレーム42を金属等で形成することも可能である。また、ねじり棒バネ30の材質も、弾性体であれば、樹脂には限られない。製造の工数は増すが、金属薄板を折り曲げや接合により所望の形状に加工したものを用いることも妨げられない。また、ねじり棒バネ30にフレーム42を貫通させることも必須ではなく、ねじり棒バネ30をフレーム42の下面に固定するようにしてもよい。
【0056】
また、この発明の振動アクチュエータは、光走査装置や光学的情報読取装置以外の装置に組み込むアクチュエータとして構成することも可能である。また、この発明の振動アクチュエータの製造方法も、同様に光走査装置や光学的情報読取装置以外の装置に組み込むアクチュエータを製造する場合にも適用可能である。
また、この発明の光走査装置を、光学的情報読取装置以外の装置に組み込む装置として構成することも可能である。
【0057】
また、この発明の光学的情報読取り装置を、バーコード以外のコード記号により示される情報を読み取る装置として構成することも可能である。さらに、据え置き型の装置としても、手持ち型の装置としても、構成することができる。
また、以上述べてきた実施形態及び変形例の構成は、矛盾しない範囲で適宜組み合わせて適用することが可能である。
【産業上の利用可能性】
【0058】
この発明による振動アクチュエータ、光走査装置、光学的情報読取装置、および振動アクチュエータの製造方法によれば、可動子を所定の回転角で往復回転運動させる振動アクチュエータ及び、これを用いた光走査装置及び光学的情報読取装置において、小型化と生産性とを両立させることができる。
従って、この発明を適用することにより、振動アクチュエータ、光走査装置及び光学的情報読取装置の小型化や製造コストの低減を図ることができる。
【符号の説明】
【0059】
1…バーコードリーダ、2…発光部、3…ミラー、4…ミラー駆動部、5…受光部、10…光学モジュール、11…操作部、12…表示部、20…光源、21…レンズ、22…アパーチャ、30…ねじり棒バネ、31…部材、40…可動子、41…ステータ、42…フレーム、43…永久磁石、45…コイル、46…ヨーク、47…配線、50…反射ミラー、51…フォトダイオード、60…基板
【技術分野】
【0001】
この発明は、可動子を所定の回転軸の回りに所定の回転角で往復回転運動させる振動アクチュエータ、対象を光により走査する光走査装置、このような光走査装置を備え、光反射率が周囲と異なるモジュールが配列されたコード記号により示される情報を読み取る光学的情報読取装置、および、上記のような振動アクチュエータの製造方法に関する。
【背景技術】
【0002】
光学式情報読取装置として、商品の品名や価格等の情報を示すバーコードを読み取るバーコードリーダが、流通業界や小売業界で広く使用されている。このようなバーコードリーダは、携帯型と定置型に大別され、携帯型のバーコードリーダでは、小型化、駆動電圧の低電圧化、高耐久性が求められる。
【0003】
携帯型のバーコードリーダの中で、光ビーム走査方式と称されるバーコードリーダは、バーコードスキャナとも呼ばれ、レーザダイオード等の光源によって出射されるレーザ光をビーム状にし、この光ビームを反射するミラーを回転あるいは振動させることで光ビームを偏向し、バーコードを走査する。そして、バーコードからの反射光を集光し、受光センサで受光して電気信号に変換する。この得られた電気信号をA/D変換してコード化し、バーコード読取情報として出力する。
【0004】
このようなバーコードリーダにおいては、バーコードを走査するビームを出力するモジュールが光走査装置に該当し、そのうち、反射用のミラーを回転あるいは振動させる機構がアクチュエータに該当する。
そして、この反射用ミラーの振動機構の小型化に関する技術として、例えば特許文献1に記載のものが知られている。
特許文献1には、携帯型のバーコードリーダにおいて、2本以上のねじり棒バネによりミラーを設けた可動子を片持ち支持すると共に、それらのねじり棒バネを、可動子が回転するときに変位するねじれ方向以外への変位を阻害する配置で並列して設けることにより、装置を小型化し、かつ読取対象を確実に走査可能とすることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−170429号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載のバーコードリーダにおいては、装置を製造する際に、ねじり棒バネの固定に高い位置精度が要求されるという問題があった。これは、特許文献1に記載のバーコードリーダにおいては、物理的な実体としての可動子の回転軸が存在せず、回転軸の位置は、ねじり棒バネの相対的な向きや位置関係によって決まるため、これらがずれると、それに応じて回転軸の位置もずれ、適切な走査が行えなくなってしまうためである。また、同様な理由から、ねじり棒バネ自体の寸法精度も、高いものが必要であった。
【0007】
従って、特許文献1に記載の構成では、大量生産の際の生産性の点で不満があった。
また、このような問題は、バーコードリーダ以外の装置に同様な振動機構を適用しようとする場合にも、同様に発生するものである。
この発明は、このような背景に鑑みてなされたものであり、可動子を所定の回転角で往復回転運動させる振動アクチュエータ及び、これを用いた光走査装置及び光学的情報読取装置において、小型化と生産性とを両立させることを目的とする。
【課題を解決するための手段】
【0008】
この発明は、上記の目的を達成するため、振動アクチュエータにおいて、可動子と、上記可動子を所定の回転角で往復回転駆動する駆動部と、一方の端部に上記可動子が固定され、上記可動子を回転可能に支持する1本のねじり棒バネとを設け、上記ねじり棒バネを、上記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が上記第1の方向と平行でない第2の方向である第2の部分とを有する形状とし、上記可動子が上記ねじり棒バネにより支持されるようにしたものである。
【0009】
このような振動アクチュエータの上記ねじり棒バネにおいて、上記第1の方向と上記第2の方向とが互いに垂直になるようにするとよい。
さらに、上記ねじり棒バネは、上記可動子の回転軸に垂直な方向の断面がH字型であるとよい。
あるいは、上記ねじり棒バネを、上記可動子の回転軸に垂直な方向の断面が、長手方向が上記第1の方向とも上記第2の方向とも平行でない第3の方向である第3の部分をも有する形状としてもよい。
【0010】
また、上記の各振動アクチュエータにおいて、上記ねじり棒バネの材質を弾性体とし、成形により形成されたものとするとよい。
さらに、上記可動子の材質を樹脂とし、上記ねじり棒バネと上記可動子とを、二色成形により一体に成形されたものとするとよい。
さらに、上記ねじり棒バネの、上記一方の端部と反対側の他方の端部に、上記可動子の回転軸に垂直な方向の断面積が上記ねじり棒バネより大きい部材を設け、上記ねじり棒バネとその部材とが成形により一体に形成するようにするとよい。
【0011】
また、この発明の光走査装置は、上記のいずれかの振動アクチュエータと、光を出射する発光部とを備え、上記可動子に、上記発光部から出射された光を反射するミラーを備え、上記発光部が出射して上記ミラーで反射された光により対象を走査するようにしたものである。
また、この発明の光学的情報読取装置は、光反射率が周囲と異なるモジュールが配列されたコード記号により示される情報を読み取る光学的情報読取装置において、上記の光走査装置を設けたものである。
【0012】
また、この発明の振動アクチュエータの製造方法は、可動子と、上記可動子を所定の回転角で往復回転駆動する駆動部と、一方の端部に上記可動子が固定され上記可動子を回転可能に支持する1本のねじり棒バネとを備えた振動アクチュエータの製造方法において、上記ねじり棒バネの材質を弾性体とし、上記ねじり棒バネの上記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が上記第1の方向と平行でない第2の方向である第2の部分とを有する形状となるように、上記ねじり棒バネと上記可動子とを二色成形により一体に成形する成形工程を備えることを特徴とする振動アクチュエータの製造方法。
【0013】
このような振動アクチュエータの製造方法において、上記成形工程において、上記ねじり棒バネの、上記一方の端部と反対側の他方の端部に、上記可動子の回転軸に垂直な方向の断面積が上記ねじり棒バネより大きい部材を、成形により上記ねじり棒バネと一体に形成し、さらに、上記断面積が大きい部材を基板に接着することにより上記ねじり棒バネをその基板に固定する固定工程をも設けるとよい。
【発明の効果】
【0014】
この発明による振動アクチュエータ、光走査装置、光学的情報読取装置及び振動アクチュエータの製造方法によれば、装置の小型化と生産性とを両立させることができる。
【図面の簡単な説明】
【0015】
【図1】この発明の光学的情報読取装置の一実施形態であるバーコードスキャナの全体構成を示す斜視図である。
【図2】図1に示したバーコードスキャナが備える光学系の模式図である。
【図3】図1に示した光学系が備える振動アクチュエータの斜視図である。
【図4】図3に示した振動アクチュエータの(a)平面図、(b)その一部拡大図、(c)正面図、および(d)右側面図である。
【図5】この発明の振動アクチュエータの一実施例の寸法を示す、図4と対応する図である。
【図6】図5に示した振動アクチュエータについての、ねじり棒バネ部分の応力解析結果を示す図である。
【図7】振動アクチュエータにおけるミラーの倒れ角度と走査ラインの関係についての説明図である。
【図8】図5に示した振動アクチュエータのブロック線図である。
【図9】この発明の実施形態の変形例におけるねじり棒バネの構成を示す、図4(b)と対応する図である。
【図10】そのさらに別の例を示す図である。
【図11】そのさらに別の例を示す図である。
【図12】そのさらに別の例を示す図である。
【図13】そのさらに別の例を示す図である。
【図14】この発明の実施形態の別の変形例におけるねじり棒バネの構成を示す、図4(d)と対応する図である。
【発明を実施するための形態】
【0016】
〔実施形態:図1乃至図4〕
まず、この発明の光学的情報読取装置の一実施形態であるバーコードリーダについて、図1乃至図4を参照しながら説明する。このバーコードリーダは、この発明の一実施形態である光走査装置及び振動アクチュエータを備えるものである。
図1は、そのバーコードリーダの全体構成を示す斜視図である。図2は、そのバーコードリーダが備える光学系の模式図である。図3は、図1に示した光学系が備える振動アクチュエータの斜視図である。図4は、図3に示した振動アクチュエータの(a)平面図、(b)その一部拡大図、(c)正面図、および(d)右側面図である。
【0017】
この発明の一実施形態であるバーコードリーダ1は、光反射率が周囲と異なるモジュールである白バーと黒バーが配列されたコード記号であるバーコードBにより示される情報を読み取る携帯型の光学的情報読取装置である。
そして、操作部11及び表示部12を備え、操作部11によりコード記号の読み取り指示その他のユーザからの操作を受け付けると共に、表示部12により、読み取り結果の表示や走査受付のための画面の表示を行う。
【0018】
また、バーコードリーダ1は、コード記号の読み取りのための構成として、光学モジュール10を備える。そして、この光学モジュール10が備える発光部2から出射されてミラー3で反射される光を、ミラー3を所定の回転角で往復回転動作させることで偏向して、読取対象のバーコードBを走査する。また、バーコードBを走査した光の反射光を受光部5で受光して、その光を光電変換した信号から、バーコードBが示す情報を読み取る。
【0019】
より具体的には、光学モジュール10は、光走査のための構成として、発光部2と、発光部2から出射された光を反射するミラー3と、そのミラー3の角度を変えるミラー駆動部4とを備え、これらにより光走査装置を構成する。
このうち発光部2においては、半導体レーザ(LD)等で構成される光源20と、光源20から所定の放射角で放射された光を集光するレンズ21と、レンズ21で集光された光を絞るアパーチャ22が筐体に取り付けられ、発光部2は、光源20から放射された光を集光または平行光化したビーム光を出射する。なお、このビーム光は、後述する反射ミラー50に設けた貫通穴50aを通って出射する。
【0020】
また、ミラー駆動部4は、可動子40とステータ41を備える振動アクチュエータである。そして、可動子40は、ミラー3と、ミラー3が取り付けられたフレーム42と、フレーム42に取り付けられた永久磁石43とを備え、1本のねじり棒バネ30で、図3及び図4(c),(d)に表われる金属製の基板60(図1においては底面側に位置する)上に回転可能に支持される構成である。なお、これらの図において、基板60は、ミラー駆動部4の近傍の部分のみを示している。また、図4(a)及び(b)においては基板の図示は省略している。
【0021】
これらのうちミラー3は、本例ではガラスで構成されるが、金属または樹脂等で構成しても良い。
また、フレーム42は、本例では硬質の樹脂であるポリカーボネートで構成され、平板状の支持部42aの一方の端部に、支持部42aに対して垂直な方向に突出するミラー取付部42bが一体に形成される。また、支持部42aの他方の端部には、支持部42aに対して垂直で、ミラー取付部42bと同じ方向に突出するマグネット取付部42cが一体に形成される。そして、フレーム42の前面側となるミラー取付部42bにミラー3が固着され、背面側となるマグネット取付部42cに永久磁石43が固着される。
【0022】
そして、支持部42aには、ねじり棒バネ30が、その上面に達するまで貫通して埋め込まれた状態となっており、このことにより、支持部42aはねじり棒バネ30の一端部と一体化し、ねじり棒バネ30に固定されている。
また、ステータ41は、図3及び図4に表われるように、不図示のボビンに巻かれたコイル45に、ヨーク46を貫通させて、基板60上に固定した構成である。また、コイル45からは、給電のために一対の配線47,47が引き出されている。なお、図4(a)において、ステータ41は、その中心軸を通り基板60に平行な平面における断面を示している。また、図3以外の図において配線47の図示は省略している。
受光部5は、読取対象を走査した光の反射光であってミラー3で反射された光を反射する反射ミラー50と、反射ミラー50で反射された光を受光し、光電変換して出力するフォトダイオード(PD)51とを備える。
【0023】
次に、ねじり棒バネ30の構成及び機能について、より詳細に説明する。
まず、ねじり棒バネ30の材質は、弾性を有する樹脂による弾性体であり、成形によって形成することができる。具体的には、シリコンゴム(例えば信越化学工業社製の信越シリコーン(商品名)KE−2095−60)を用いることができる。
また、ねじり棒バネ30と可動子40のフレーム42とは、二色成形により一体に成形して形成したものである。従って、ねじり棒バネ30とフレーム42とは、容易に分離することはない。また、ねじり棒バネ30と基板60とは、接着により固着する。
ねじり棒バネ30は、以上の構成により、フレーム42を含む可動子40を基板60に対して片持ち支持することができる。
【0024】
ところで、可動子40を片持ち支持する場合、1本の平板状のねじり棒バネで可動子を片持ち支持する構造では、ねじり棒バネのねじれと曲げの2つの振動モードがあるため、ミラーで反射された光が2次元方向(所望の走査ラインから外れる方向)にぶれる欠点がある。
【0025】
しかし、ミラー駆動部4において、ねじり棒バネ30は、図3に示した可動子40の回転軸Rに垂直な方向の断面が、少なくとも、長手方向がミラーに平行な第1の方向である部分(H字の縦線に当たる部分)2箇所と、長手方向がミラーに垂直な第2の方向である部分(H字の横線に当たる部分)1箇所とを有するH字型の形状である。
従って、H字の縦線に当たる部分は、ミラー3の面に対して垂直な方向に比較して、平行な方向には撓みにくく、ミラー3の面に対して平行な方向への変形が規制される。また、H字の横線に当たる部分は、ミラー3の面に対して平行な方向に比較して、垂直な方向には撓みにくく、ミラー3の面に対して垂直な方向への変形が規制される。
【0026】
このため、H字型の断面を有するねじり棒バネ30全体では、回転方向であるねじれ方向の剛性は小さく、かつ、他の曲げ方向の剛性は大きくなり、ねじれ方向以外への変形を抑制することができる。これにより、ねじり棒バネ30の中心に回転軸Rが形成され、コイル45に通電することで、可動子40は、回転軸Rを中心に、コイル45と永久磁石43との間に作用する力と、ねじり棒バネ30のねじれにより生じるバネ力とが釣り合う位置まで回転する。また、可動子40の回転方向は、コイル45に流れる電流の向きに依存するので、コイル45に、正負が所定の周期で逆転するパルス電圧を印加することで、可動子40を、所定の回転角で往復回転駆動することができる。
【0027】
一方、以上のねじり棒バネ30は、全体として1本のバネであるため、複数の部品の位置合わせをする必要がなく、ミラー駆動部4の製造工程の工数も少ないものとすることができると共に、部品点数も削減することができる。
さらに、材質を樹脂とすることにより、成形で寸法誤差の少ない部品を容易に量産することができ、この点でも生産性の向上を図ることができる。
【0028】
また、可動子40を構成するフレーム42も樹脂製としているため、ねじり棒バネ30と可動子40とを、二色成形により一体に成形することができ、このことにより、可動子40とねじり棒バネ30とを、寸法誤差を少なくかつ信頼性よく容易に固定することができる。フレーム42とねじり棒バネ30とを一体の部品と捉えることができるので、この点でも部品点数を削減することができる。
【0029】
また、ミラー駆動部4を製造する際には、この二色成形した部品のフレーム42にミラー3や永久磁石43を接着等により固定した後で単にねじり棒バネ30の部分を基板60上に接着等により固定すればよいので、組み立て作業や他の部品との位置合わせを容易に行うことができる。
特に、バーコードリーダに適用する場合、フレーム42のサイズは、1辺が1〜2ミリメートル程度とかなり小さいものとすることが要求されるため、このような小サイズの部品を効率よく量産するためには、以上の構成が大いに有用である。
【0030】
〔実施例:図5乃至図8〕
次に、上述した実施形態におけるミラー駆動部4を構成する振動アクチュエータの具体的な実施例について、図5乃至図8を参照しながら説明する。
図5は、図4と対応する図であり、この実施例における振動アクチュエータの各部の寸法を示す。単位はミリメートルである。
また、ねじり棒バネ30の材質は、ヤング率3.39MPa(メガパスカル)のシリコンゴム(信越化学工業社製の信越シリコーン(商品名)KE−2095−60)とし、フレーム42の材質はポリカーボネートとした。
【0031】
そして、振動アクチュエータのその他の各部の仕様は、以下の表1に示す通りとした。
【表1】
【0032】
発明者は、以上のような構成の振動アクチュエータにつき、三次元有限要素法電磁界解析ソフトMaxwellを用いて、三次元直交座標系で静磁界解析を行った。表2にその解析条件を示す。
【表2】
【0033】
解析の結果、回転角θは図5に示すz軸を基準とする右ねじの向きを正として、起磁力NI=17.6A,回転角θ=0degreeのとき、トルクT=16.7μN・mであった。また,NI=17.6A,θ=13.5degreeのとき、トルクT=11.6μN・mであった。NI=0A,θ=13.5degreeのとき、トルクT=−2.04μN・mであるので、以下の数1を用いて磁気ばね定数Kmsを求めると8.66μN・m/radであった。この磁気ばね定数Kmsは,振動アクチュエータの固有振動数を導出する際に使用する。
【0034】
【数1】
ただし、T:トルク(N・m),θ:ミラーの回転角(rad)
【0035】
また、振動アクチュエータの起動する早さを調べるために、指標として機械的時定数Tmを求める。機械的時定数Tmおよびトルク定数KTは以下の数2と数3より求めることができる。
【数2】
ただし、J:慣性モーメント(kg・m2),R:コイル抵抗(Ω),
Ke:逆起電力定数(V・s/rad),KT:トルク定数(N・m/A),
【数3】
ただし、I:電流(A)
【0036】
また、トルク−電流特性は、θ=0degree,I=16mAにおいてトルクT=16.7μN・mであった。数3を用いたところ、トルク定数KT=1.04mN・m/Aとなった。逆起電力定数とトルク定数はKe≒KTとみなせるため,数2より機械的時定数はTm=192msとなった。
【0037】
また、図5に示すx方向およびy方向に発生する振動アクチュエータの静推力−回転角特性は、以下の通りとなった。すなわち、NI=17.6A,θ=13.5degreeのとき、x方向の静推力Fx=4.9mNであった。振動アクチュエータが駆動していない状態であるNI=0A,θ=0degreeのときでは、y方向の静推力として、吸引力Fy=19.5mNが発生していた。また、NI=17.6A,θ=13.5degreeのとき、Fy=21.5mNであった。ここで求めた推力を、ねじり棒ばねの応力解析を行う際に利用する。
【0038】
次に、表3に示す応力解析条件に基づき、Solidworks Simulationを用いて三次元直交座標系での静解析を行った。要素数は約15万個とした。
【表3】
【0039】
図6に、(a)可動子40と、(b)そのねじり棒バネ30部分の応力解析結果を示す。
永久磁石43の中央部分にFx=11mN,Fy=21.5mNを印加したときに、ミラーの回転角はθ=13.5degreeとなる。ねじり棒バネ30を構成するシリコンゴムに発生する最大応力はσm=0.49MPaで、ねじり棒バネ30の端部に発生した。シリコンゴムの降伏強さは4.25MPaであるために,安全率SはS=8.7となり、実使用にも耐えられる耐久性を有している。
【0040】
ここで,振動アクチュエータの運動方程式は数4となる。
【数4】
ただし、C:減衰定数(N・m・s/rad),K:ばね定数(N・m/rad)
【0041】
数4より固有振動数f0は下記数5となる。
【数5】
ただし、Kθ:ねじり方向のばね定数(N・m/rad),
Kms:磁気ばね定数(N・m/rad)
【0042】
以上の解析結果より,ねじり方向のばね定数Kθ=135μN・m/radであり、数5を用いて固有振動数f0を求めると49.5Hzであった。これは目標走査周波数50±5Hzの範囲内である。
【0043】
また、図7に、ミラーの倒れ角度βと走査ラインの様子を示した。
倒れ角度βが大きい場合や、倒れ方向の固有振動数とねじり方向の固有振動数が近い値をとる場合には、直線状の走査ラインが照射されない。よって倒れ方向の特性を考慮する必要がある。
上記の解析結果より倒れ角度を求めると、β=0.21degreeとなった。この値であれば、実使用の際を想定した走査原点から150mmの距離での走査ラインの曲がりは1mmであり、使用時には問題のない値となった。
【0044】
また、倒れ方向の固有振動数fβを、数6と数7を用いて求める。
【数6】
ただし、Kβ:倒れ方向のばね定数(N・m/rad),
Jβ:倒れ方向の慣性モーメント(kg・m2)
【数7】
ただし、β:ミラーの倒れ角度
【0045】
解析結果より求めた,倒れ方向の慣性モーメントJβ=2.13g・mm2、ミラーの倒れ角度β=0.21degree、及び倒れ方向のばね定数Kβ=13.2mN・m/radを用いて倒れ方向の固有振動数fβを算出すると396Hzであった。振動アクチュエータのねじり方向の固有振動数f0は49.5Hzであるので、両固有振動数は8倍程度離れた値をとっているため駆動の際には問題のない結果となった。
【0046】
次に、図8に振動アクチュエータのブロック線図を示す。
図8のブロック線図を用いて解析ソフトMatlab Simulinkで解析を行い、本アクチュエータが目標回転角で駆動することを確認した。また、目標回転角に達するまでの時間を求めた。なお、駆動の際には、矩形波の駆動電圧V=2.2Vを逆起電力が0Vのときに印加するようにした。最初に印加する電圧は、起動を早くさせるためにパルス幅の大きい電圧を印加した。
解析の結果、この条件で、振動アクチュエータは回転角をθ=±13.5degreeとさせることが可能であった。また,目標回転角θ=13.5degreeとなるまでに要する時間は36.9msであり,光スキャナを搭載した携帯端末をすばやく起動させることができる。
【0047】
〔変形例:図9乃至図14〕
次に、上述した実施形態の変形例について説明する。
まず、ねじり棒バネ30の形状について、上述した実施形態では、可動子40の回転軸Rに垂直な方向の断面がH字型である例について説明した。しかしながら、ねじり棒バネ30の断面形状は、これに限られない。可動子40の回転軸Rに垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向がその第1の方向と平行でない第2の方向である第2の部分とを有する形状であれば、上述した実施形態の場合と同様、コイル45への通電により、基板60に垂直な回転軸R(位置はねじり棒バネ30の形状によって異なる)を中心に、可動子40を回転させることができる。
【0048】
これは、上記のような第1の部分と第2の部分とを備えることにより、ねじり棒バネ30を、第1の部分では第1の方向に撓みにくく、第2の部分では第1の方向と異なる第2の方向に撓みにくい性質とすることができるので、全体として、ねじり棒バネ30を、回転方向であるねじれ方向の剛性は小さく、かつ、他の曲げ方向の剛性は大きいものとし、ねじれ方向以外への変形を抑制することができるためである。
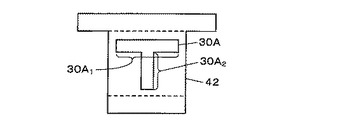
【0049】
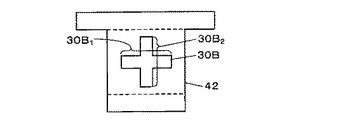
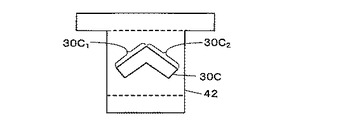
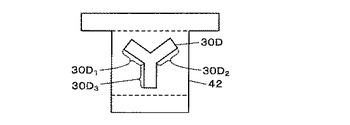
図9乃至図13に、このような条件を満たすねじり棒バネの形状の例を示す。これらの図は、図4(b)と対応する図面で、これらの図に表われるねじり棒バネの断面形状のみを変形したものである。これらの図において、30A〜30Eがそれぞれねじり棒バネを示し、これらの符号に添え字1〜3を付けて示す部分が、各ねじり棒バネにおける第1〜第3の部分を示す。
【0050】
図9(T字型)及び図10(十字型)は、第1の方向(第1の部分の長手方向)と第2の方向(第2の部分の長手方向)とが互いに垂直な例である。このような構成であると、ねじれ方向の剛性に比べて他の曲げ方向の剛性を大きくし易く、好ましい特性のねじり棒バネが得られ易い。
しかし、これに限られることはなく、図11に示すように、第1の方向と第2の方向とは垂直でなくてよい。また、第1の部分30C1と第2の部分30C2とが端部で結合していてもよい。
【0051】
また、図12(Y字型)及び図13(中空三角柱型)に示すように、長手方向が第1の方向とも第2の方向とも平行でない第3の方向である第3の部分をも有するようにしてもよい。このような構成であっても、第3の部分では第1の方向とも第2の方向とも異なる第3の方向に撓みにくい性質とすることができるので、全体として、ねじり棒バネ30を、回転方向であるねじれ方向の剛性は小さく、かつ、他の曲げ方向の剛性は大きいものとし、ねじれ方向以外への変形を抑制することができるためである。
ねじり棒バネ30の形状については、図9乃至図13に示した形状以外にも、さらに種々のバリエーションが考えられる。
【0052】
また、別の変形として、ねじり棒バネ30と基板60とをより信頼性よく固定するため、ねじり棒バネ30の基板60側の端部に、可動子40の回転軸Rに垂直な方向の断面積がねじり棒バネ30より大きい部材を、ねじり棒バネ30と一体に設けることが考えられる。
図14に、このような部材を設けた例を示す。図14は、図4(d)と対応する図である。
上記の断面積が大きい部材は、図14に、符号31で示されるものであり、例えば、フレーム42とねじり棒バネ30とを二色成形する際に、フレーム42と同じ材質により、フレーム42と同時に形成することが考えられる。
【0053】
そして、この部材31と基板60とを接着等により固定することにより、接触面積を大きく取ることができるため、信頼性のよい固定が可能となる。また、ねじり棒バネ30と部材31との間との間も、二色成形により信頼性よく固定できる。従って、全体として、ねじり棒バネ30と基板60とを、信頼性よく固定できる。
【0054】
なお、部材31に当たる部分を、ねじり棒バネ30と同じ材質で形成することも可能である。しかしこの場合、部材31も弾性を有することになるため、ねじり棒バネ30と部材31との境界で急激に断面積が広がると、その部分に応力が集中し、破損し易くなることが考えられる。従ってこの場合、ねじり棒バネ30のうち基板60に近い部分について、徐々に断面積を増す構成とすることが好ましい。
【0055】
また、さらに他の変形として、二色成形と比べて信頼性は低下するが、ねじり棒バネ30とフレーム42との固定を、接着や嵌合によって行うことも考えられる。この場合、フレーム42を金属等で形成することも可能である。また、ねじり棒バネ30の材質も、弾性体であれば、樹脂には限られない。製造の工数は増すが、金属薄板を折り曲げや接合により所望の形状に加工したものを用いることも妨げられない。また、ねじり棒バネ30にフレーム42を貫通させることも必須ではなく、ねじり棒バネ30をフレーム42の下面に固定するようにしてもよい。
【0056】
また、この発明の振動アクチュエータは、光走査装置や光学的情報読取装置以外の装置に組み込むアクチュエータとして構成することも可能である。また、この発明の振動アクチュエータの製造方法も、同様に光走査装置や光学的情報読取装置以外の装置に組み込むアクチュエータを製造する場合にも適用可能である。
また、この発明の光走査装置を、光学的情報読取装置以外の装置に組み込む装置として構成することも可能である。
【0057】
また、この発明の光学的情報読取り装置を、バーコード以外のコード記号により示される情報を読み取る装置として構成することも可能である。さらに、据え置き型の装置としても、手持ち型の装置としても、構成することができる。
また、以上述べてきた実施形態及び変形例の構成は、矛盾しない範囲で適宜組み合わせて適用することが可能である。
【産業上の利用可能性】
【0058】
この発明による振動アクチュエータ、光走査装置、光学的情報読取装置、および振動アクチュエータの製造方法によれば、可動子を所定の回転角で往復回転運動させる振動アクチュエータ及び、これを用いた光走査装置及び光学的情報読取装置において、小型化と生産性とを両立させることができる。
従って、この発明を適用することにより、振動アクチュエータ、光走査装置及び光学的情報読取装置の小型化や製造コストの低減を図ることができる。
【符号の説明】
【0059】
1…バーコードリーダ、2…発光部、3…ミラー、4…ミラー駆動部、5…受光部、10…光学モジュール、11…操作部、12…表示部、20…光源、21…レンズ、22…アパーチャ、30…ねじり棒バネ、31…部材、40…可動子、41…ステータ、42…フレーム、43…永久磁石、45…コイル、46…ヨーク、47…配線、50…反射ミラー、51…フォトダイオード、60…基板
【特許請求の範囲】
【請求項1】
可動子と、
前記可動子を所定の回転角で往復回転駆動する駆動部と、
一方の端部に前記可動子が固定され、前記可動子を回転可能に支持する1本のねじり棒バネとを備え、
前記ねじり棒バネは、前記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が前記第1の方向と平行でない第2の方向である第2の部分とを有する形状であり、
前記可動子が前記ねじり棒バネにより支持されることを特徴とする振動アクチュエータ。
【請求項2】
請求項1に記載の振動アクチュエータであって、
前記ねじり棒バネにおいて、前記第1の方向と前記第2の方向とが互いに垂直であることを特徴とする振動アクチュエータ。
【請求項3】
請求項2に記載の振動アクチュエータであって、
前記ねじり棒バネは、前記可動子の回転軸に垂直な方向の断面が、H字型であることを特徴とする振動アクチュエータ。
【請求項4】
請求項1に記載の振動アクチュエータであって、
前記ねじり棒バネにおいて、前記可動子の回転軸に垂直な方向の断面が、長手方向が前記第1の方向とも前記第2の方向とも平行でない第3の方向である第3の部分をも有する形状であることを特徴とする振動アクチュエータ。
【請求項5】
請求項1乃至4のいずれか一項に記載の振動アクチュエータであって、
前記ねじり棒バネの材質は弾性体であり、成形により形成されたものであることを特徴とする振動アクチュエータ。
【請求項6】
請求項5に記載の振動アクチュエータであって、
前記可動子の材質が樹脂であり、
前記ねじり棒バネと前記可動子とが、二色成形により一体に成形されたものであることを特徴とする振動アクチュエータ。
【請求項7】
請求項5又は6に記載の振動アクチュエータであって、
前記ねじり棒バネの、前記一方の端部と反対側の他方の端部に、前記可動子の回転軸に垂直な方向の断面積が前記ねじり棒バネより大きい部材を設け、
前記ねじり棒バネと該部材とが成形により一体に形成されていることを特徴とする振動アクチュエータ。
【請求項8】
請求項1乃至7のいずれか一項に記載の振動アクチュエータと、
光を出射する発光部とを備え、
前記可動子に、前記発光部から出射された光を反射するミラーを備え、
前記発光部が出射して前記ミラーで反射された光により対象を走査することを特徴とする光走査装置。
【請求項9】
光反射率が周囲と異なるモジュールが配列されたコード記号により示される情報を読み取る光学的情報読取装置であって、
請求項8に記載の光走査装置を備えたことを特徴とする光学的情報読取装置。
【請求項10】
可動子と、前記可動子を所定の回転角で往復回転駆動する駆動部と、一方の端部に前記可動子が固定され前記可動子を回転可能に支持する1本のねじり棒バネとを備えた振動アクチュエータの製造方法であって、
前記ねじり棒バネの材質は弾性体であり、
前記ねじり棒バネの前記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が前記第1の方向と平行でない第2の方向である第2の部分とを有する形状となるように、前記ねじり棒バネと前記可動子とを二色成形により一体に成形する成形工程を備えることを特徴とする振動アクチュエータの製造方法。
【請求項11】
請求項10に記載の振動アクチュエータの製造方法であって、
前記成形工程において、前記ねじり棒バネの、前記一方の端部と反対側の他方の端部に、前記可動子の回転軸に垂直な方向の断面積が前記ねじり棒バネより大きい部材を、成形により前記ねじり棒バネと一体に形成し、
さらに、前記断面積が大きい部材を基板に接着することにより前記ねじり棒バネを該基板に固定する固定工程をも備えること特徴とする振動アクチュエータの製造方法。
【請求項1】
可動子と、
前記可動子を所定の回転角で往復回転駆動する駆動部と、
一方の端部に前記可動子が固定され、前記可動子を回転可能に支持する1本のねじり棒バネとを備え、
前記ねじり棒バネは、前記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が前記第1の方向と平行でない第2の方向である第2の部分とを有する形状であり、
前記可動子が前記ねじり棒バネにより支持されることを特徴とする振動アクチュエータ。
【請求項2】
請求項1に記載の振動アクチュエータであって、
前記ねじり棒バネにおいて、前記第1の方向と前記第2の方向とが互いに垂直であることを特徴とする振動アクチュエータ。
【請求項3】
請求項2に記載の振動アクチュエータであって、
前記ねじり棒バネは、前記可動子の回転軸に垂直な方向の断面が、H字型であることを特徴とする振動アクチュエータ。
【請求項4】
請求項1に記載の振動アクチュエータであって、
前記ねじり棒バネにおいて、前記可動子の回転軸に垂直な方向の断面が、長手方向が前記第1の方向とも前記第2の方向とも平行でない第3の方向である第3の部分をも有する形状であることを特徴とする振動アクチュエータ。
【請求項5】
請求項1乃至4のいずれか一項に記載の振動アクチュエータであって、
前記ねじり棒バネの材質は弾性体であり、成形により形成されたものであることを特徴とする振動アクチュエータ。
【請求項6】
請求項5に記載の振動アクチュエータであって、
前記可動子の材質が樹脂であり、
前記ねじり棒バネと前記可動子とが、二色成形により一体に成形されたものであることを特徴とする振動アクチュエータ。
【請求項7】
請求項5又は6に記載の振動アクチュエータであって、
前記ねじり棒バネの、前記一方の端部と反対側の他方の端部に、前記可動子の回転軸に垂直な方向の断面積が前記ねじり棒バネより大きい部材を設け、
前記ねじり棒バネと該部材とが成形により一体に形成されていることを特徴とする振動アクチュエータ。
【請求項8】
請求項1乃至7のいずれか一項に記載の振動アクチュエータと、
光を出射する発光部とを備え、
前記可動子に、前記発光部から出射された光を反射するミラーを備え、
前記発光部が出射して前記ミラーで反射された光により対象を走査することを特徴とする光走査装置。
【請求項9】
光反射率が周囲と異なるモジュールが配列されたコード記号により示される情報を読み取る光学的情報読取装置であって、
請求項8に記載の光走査装置を備えたことを特徴とする光学的情報読取装置。
【請求項10】
可動子と、前記可動子を所定の回転角で往復回転駆動する駆動部と、一方の端部に前記可動子が固定され前記可動子を回転可能に支持する1本のねじり棒バネとを備えた振動アクチュエータの製造方法であって、
前記ねじり棒バネの材質は弾性体であり、
前記ねじり棒バネの前記可動子の回転軸に垂直な方向の断面が、少なくとも、長手方向が第1の方向である第1の部分と、長手方向が前記第1の方向と平行でない第2の方向である第2の部分とを有する形状となるように、前記ねじり棒バネと前記可動子とを二色成形により一体に成形する成形工程を備えることを特徴とする振動アクチュエータの製造方法。
【請求項11】
請求項10に記載の振動アクチュエータの製造方法であって、
前記成形工程において、前記ねじり棒バネの、前記一方の端部と反対側の他方の端部に、前記可動子の回転軸に垂直な方向の断面積が前記ねじり棒バネより大きい部材を、成形により前記ねじり棒バネと一体に形成し、
さらに、前記断面積が大きい部材を基板に接着することにより前記ねじり棒バネを該基板に固定する固定工程をも備えること特徴とする振動アクチュエータの製造方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図6】
【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図6】
【公開番号】特開2012−157802(P2012−157802A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−18331(P2011−18331)
【出願日】平成23年1月31日(2011.1.31)
【出願人】(391062872)株式会社オプトエレクトロニクス (70)
【出願人】(504180239)国立大学法人信州大学 (759)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年1月31日(2011.1.31)
【出願人】(391062872)株式会社オプトエレクトロニクス (70)
【出願人】(504180239)国立大学法人信州大学 (759)
【Fターム(参考)】
[ Back to top ]