
振動センサおよび振動検知システム
【課題】 振動が印加された場合のインピーダンス変化が大きい振動センサと、この振動センサを用いた通信距離の拡大が可能な振動検知システムを提供すること。
【解決手段】 水晶基板4と、水晶基板4上に形成された一対の入出力端子5と、一対の入出力端子5に接続された表面弾性波を励振するための一対の櫛歯電極1とを有し、入出力端子5に電気信号を入力し、水晶基板4に生じた振動により生ずる入出力端子5のインピーダンスの変化を検出して水晶基板4の振動を検出する。櫛歯電極1の開口長2を90μm〜270μmとし、櫛歯電極1により励振する表面弾性波の波長λに対する櫛歯電極1の開口長の比rが、70≦r≦210、電極指の本数nは、160≦n≦480となるように設定され、n×r≧18000となっている。
【解決手段】 水晶基板4と、水晶基板4上に形成された一対の入出力端子5と、一対の入出力端子5に接続された表面弾性波を励振するための一対の櫛歯電極1とを有し、入出力端子5に電気信号を入力し、水晶基板4に生じた振動により生ずる入出力端子5のインピーダンスの変化を検出して水晶基板4の振動を検出する。櫛歯電極1の開口長2を90μm〜270μmとし、櫛歯電極1により励振する表面弾性波の波長λに対する櫛歯電極1の開口長の比rが、70≦r≦210、電極指の本数nは、160≦n≦480となるように設定され、n×r≧18000となっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象物の振動現象を検出する振動センサ、およびその振動センサを用いたガラス破壊などによる振動の検知を行う振動検知システムに関する。
【背景技術】
【0002】
従来、振動センサは、建造物の耐震診断、防犯セキュリティ用のガラス破壊検知装置、或いは設備や工作機械の異常振動検知などに利用されている。その一例として、ガラス等の破壊時に生じるAE(アコースティックエミッション)波のように瞬時的な振動を検知する振動センサがあり、その従来例が特許文献1に記載されている。特許文献1では、圧電体基板上の表面弾性波素子を用いたセンサ素子とアンテナとを備えた振動センサと、この振動センサに電波を放出して反射波を検出する質問器を用いて振動センサをバッテリレスとしたガラス破壊などに伴う振動を検知するシステム、すなわち振動検知システムが記載されている。また、このシステムでは、振動検知処理機能を質問器側に設けたことから、振動センサから信号処理部などを省略することができ、振動センサの小型化が可能となっている。
【0003】
特許文献1の振動センサは、上述のように電源を必要としないこと、および小型化可能なことから、開閉式の窓にも取り付けられるという利点がある。図5に特許文献1に提案されている、従来の振動検知システムの一例のブロック構成図を示し、図6に従来の振動センサに使用するセンサ素子の構造の断面図を示し、図7に従来のセンサ素子とアンテナとが一体となった振動センサの斜視図をそれぞれ示す。
【0004】
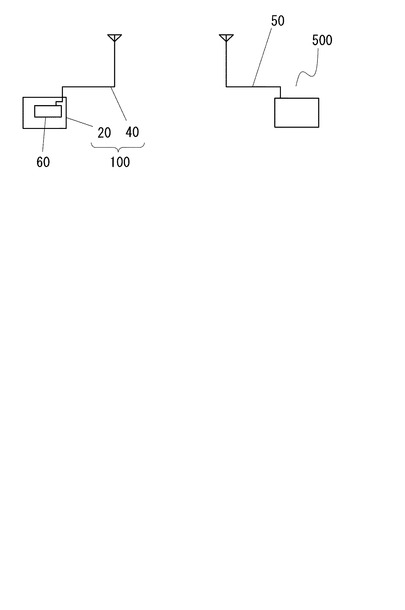
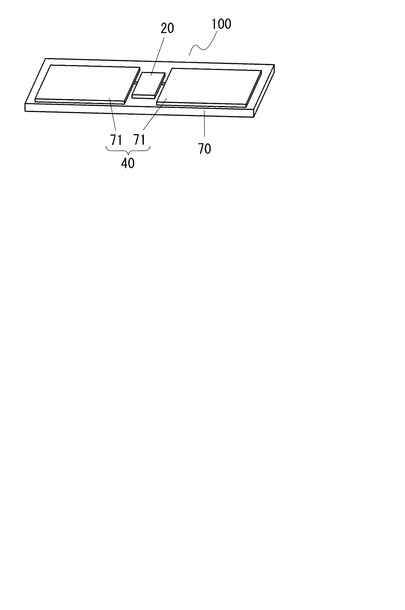
図5に示されるように、この振動検知システムは、アンテナ40およびセンサ素子20からなる振動センサ100と、この振動センサ100を無線電波により駆動し、センシング結果を受信する質問器500とからなる。振動センサ100はRFID(Radio Frequency IDentification)技術を応用した小型化を可能とするセンサであり、図7に示されるように、センサ素子20とアンテナ40を構成する平板状のアンテナ導体71が平板状のタグ基板70(引用文献ではタグ基体)上に搭載されている。質問器500は送受信兼用のアンテナ50と送受信号分離のためのサーキュレータ、受信回路、送信回路などから構成されている。
【0005】
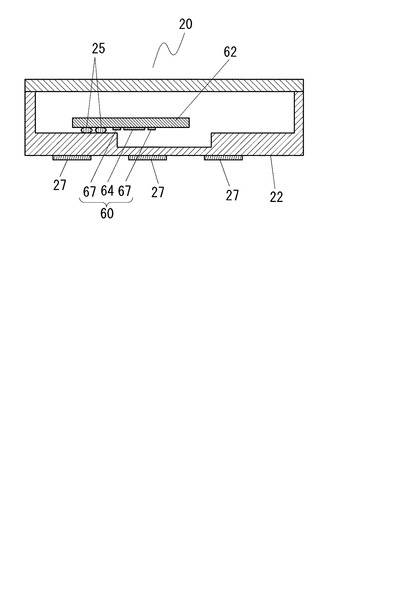
また、図6に示されるように、センサ素子20は水晶基板などの圧電体基板62と、圧電体基板62上に形成された櫛歯電極64およびその表面弾性波伝搬方向の両側に近接して設けられた反射器67とを備えたSAW共振子60を有している。圧電体基板62は、支持基板22により片持ち梁状に支持され、その支持部の根元に近いところに櫛歯電極64が位置しているので、圧電体基板62に生じた振動を櫛歯電極64の近傍に効率よく集中させることができる。SAW共振子60の櫛歯電極64は半田バンプ25を介して支持基板22の外側の端子27に接続され、端子27はアンテナ40に接続される。
【0006】
アンテナ部40にて受信した受信波は、センサ素子20の内部の櫛歯電極64まで供給され、受信波の周波数がSAW共振子60の共振周波数に一致したときは、受信波はSAW共振子60にエネルギーが閉じ込められるので、再びアンテナ40に戻る反射波は小さい。しかし、圧電体基板62に振動が加わると櫛歯電極64の電極指間隔が変化するのでSAW共振子60の共振周波数が変化し、そのインピーダンスが変化することにより、アンテナ40から反射波として振動センサ100の外部に送信されることとなる。反射波には圧電体基板62の振動周波数に対応したサイドローブが発生し、その反射波中のサイドローブを質問器500で検出することにより、振動が検出される。
【0007】
圧電体基板62を片持ち梁構造とし、その長さを選択して圧電体基板62の共振周波数を検出対象が発生する振動周波数帯に合わせると、検知対象物の振動が圧電体基板62で拡大され検出される。例えばガラスの破壊などに伴う振動現象の検出に適用するような場合、ガラスの破壊に伴う振動自体は2msec程度の間しか持続しないのに対して、ガラス破壊に伴う振動に特徴的な周波数帯域に属するように圧電体基板62の共振周波数を合わせることで、ガラス破壊に伴う振動自体が止まったあとであっても、圧電体基板62の振動を2msecよりも持続させることができ、振動検知の確度が向上する。
【0008】
ここで、表面弾性波素子は従来より様々なデバイスに用いられており、特に周波数フィルタなどに多く用いられている。これらの従来の表面弾性波素子においては、表面弾性波を発生させる櫛歯電極の入力インピーダンスは、駆動周波数において50Ω程度となるように設計されるのが一般的である。また、表面弾性波共振器により周波数フィルタを構成する場合、櫛歯電極の電極指の本数が多すぎると高次の共振モードが発生する。通常はこの高次モードはスプリアス(不要波)の原因となるが、特許文献2に記載の弾性表面波フィルタのようにこの高次モードをフィルタ特性に利用する場合もある。
【0009】
従来、上記の振動センサに用いる表面弾性波素子においても、その櫛歯電極は周波数フィルタなどの表面弾性波素子において用いられる櫛歯電極と同様な設計を行っていた。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−232708号公報
【特許文献2】特開平1−231417号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
特許文献1の振動センサはバッテリレスであるため、検出結果の電気信号を無線で通信する振動検知システムにおいて通信距離を拡大するためには、振動センサから出力される信号の強度を大きくする必要がある。また、この振動センサは、振動により生ずる櫛歯電極のインピーダンス変化により振動を検出するため、検出信号強度を大きくするためにはそのインピーダンス変化量を大きくするよう櫛歯電極の設計を行う必要がある。
【0012】
しかし、上記のように、従来の振動センサの櫛歯電極は、他の表面弾性波素子と同様に、主として駆動周波数においてインピーダンスが50Ω程度となるような設計のみを行っており、振動に対するインピーダンス変化に着目した設計は行われていなかった。このため、この振動センサを用いた振動検知システムにおける通信距離は十分ではなかった。
【0013】
そこで、本発明の課題は、振動が印加された場合のインピーダンス変化が大きい振動センサと、この振動センサを用いた通信距離の拡大が可能な振動検知システムを提供することにある。
【課題を解決するための手段】
【0014】
上記課題を解決するため、本発明による振動センサは、水晶基板と、前記水晶基板上に形成された一対の入出力端子と、前記入出力端子に接続された表面弾性波を励振するための一対の櫛歯電極とを有し、前記入出力端子に電気信号を入力し、前記入出力端子から反射して出力する前記電気信号の変化を検出することにより前記水晶基板に生じた振動により生ずる前記入出力端子のインピーダンスの変化を検出して前記水晶基板の振動を検出する振動センサにおいて、前記櫛歯電極の電極指の本数をn、前記櫛歯電極により励振する表面弾性波の波長に対する前記櫛歯電極の開口長の比をrとするとき、160≦n≦480、70≦r≦210であって、かつ、n×r≧18000であることを特徴とする。
【0015】
また、前記水晶基板が支持基板に一端を支持されることにより片持ち梁構造体が構成されていてもよい。
【0016】
また、前記入出力端子に接続されたアンテナを有し、前記アンテナに電波信号を入力することにより前記電気信号を入力し、前記電気信号が反射して前記アンテナから出力する電波信号の変化を検出することにより、前記入出力端子から反射して出力する前記電気信号の変化を検出して前記インピーダンスの変化を検出してもよい。
【0017】
本発明による振動検知システムは、前記の振動センサと、前記の振動センサに前記電波信号を送信する機能と前記の振動センサから反射された電波信号を受信する機能とを有する質問器を備えている。
【発明の効果】
【0018】
本発明は、発明者らが、目的とする振動検知システムにおける振動センサの感度、すなわち、振動が印加された時の櫛歯電極のインピーダンス変化が大きくなるような櫛歯電極の設計指針を見出したことに基づくものである。本発明の振動センサにおいて、櫛歯電極の電極指の本数n、前記櫛歯電極により励振する表面弾性波の波長に対する前記櫛歯電極の開口長の比rを上記のように設定することにより、従来の櫛歯電極に比べて振動が印加された時のインピーダンス変化を大きくできる。
【0019】
すなわち、本発明により、振動が印加された場合のインピーダンス変化が大きい振動センサと、この振動センサを用いた通信距離の拡大が可能な振動検知システムが得られる。
【図面の簡単な説明】
【0020】
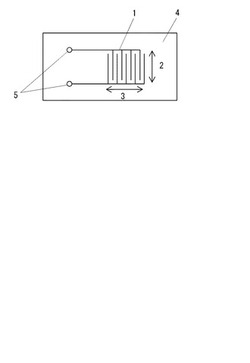
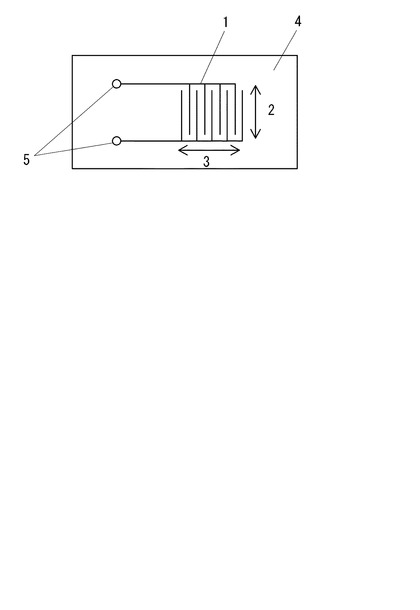
【図1】本発明による振動センサの一実施の形態の模式的な平面図。
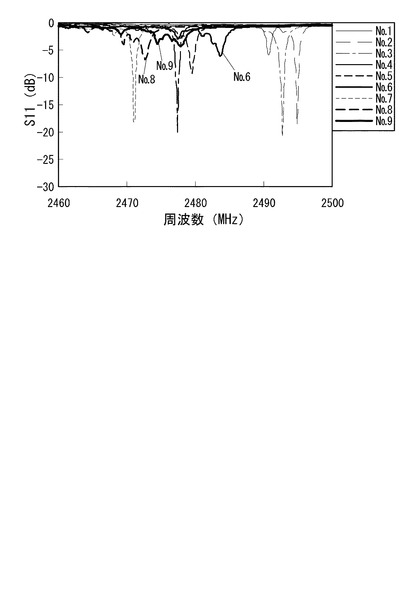
【図2】本発明による振動センサの実施例および比較例のS11特性を測定した結果を示す図。
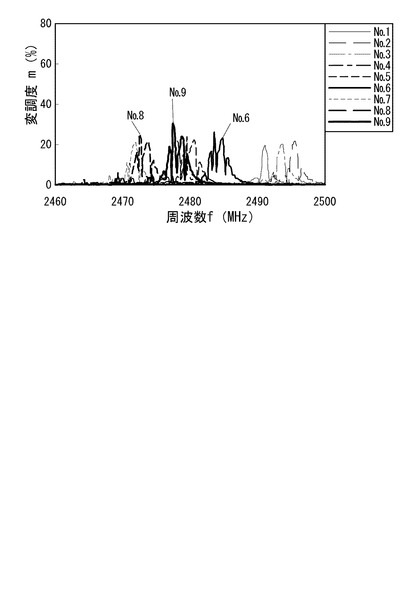
【図3】本発明による振動センサの実施例および比較例の変調度を測定した結果を示す図。
【図4】質問器から送信される連続的な電波信号に対して振動センサのアンテナから出力された電波信号の波形を模式的に示す図。
【図5】従来の振動検知システムの一例のブロック構成図。
【図6】従来の振動センサに使用するセンサ素子の構造の断面図。
【図7】従来のセンサ素子とアンテナとが一体となった振動センサの斜視図。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。図1は、本発明による振動センサの一実施の形態の模式的な平面図である。本実施の形態においては、水晶基板4と、水晶基板4上に形成された一対の入出力端子5と、入出力端子5に接続された表面弾性波を励振するための一対の櫛歯電極1とを有している。入出力端子5に電気信号を入力し、入出力端子5から反射して出力する前記電気信号の変化を検出することによって、水晶基板4に生じた振動により生ずる入出力端子5のインピーダンスの変化を検出して水晶基板4の振動を検出する。
【0022】
ここで、本実施の形態においては、櫛歯電極1により励振する表面弾性波の励振周波数を2.45GHzとする。この場合、櫛歯電極1により励振する表面弾性波の波長Λは約1.28μmとなる。また、本実施の形態では、櫛歯電極1の開口長2を90μm〜270μmとし、櫛歯電極1により励振する表面弾性波の波長Λに対する櫛歯電極1の開口長の比rが、70≦r≦210、となるようにしている。さらに、櫛歯電極1の表面弾性波の伝搬方向3の方向に配置された電極指の本数nは、160≦n≦480となるように設定されている。また、n×r≧18000となっている。
【0023】
また、本実施の形態の振動センサにおいて、図6に示した従来の振動センサと同様に、水晶基板4の一端を支持基板に支持することにより片持ち梁構造体を構成し、振動検知確度の向上を図ることができる。
【0024】
次に、本実施の形態に示した構成の振動センサを作製し、評価を行った具体的な実施例について説明する。水晶ウエハ上に公知のスパッタリング技術、フォトリソグラフィ技術により、Ti/Al層からなる櫛歯電極1を形成した。櫛歯電極1の表面弾性波の励振周波数が2.45GHzとなるように電極指幅、および電極指間の間隔は0.32μmとした。尚、Ti/Al層の厚みは、適度な電気機械結合係数を得るために70nmとすることが望ましい。櫛歯電極1は、比較のため、上記のnおよびrに対する条件を満たす実施例の形状以外の比較例も同時に作製し、評価を行った。具体的には、表1に示すように、電極指の本数nを80、160、320本とし、開口長を45、90、180μmとして、それらを組み合わせたNo.1からNo.9の9種類の振動センサの試料を作製した。表1において、No.6、8、9が上記の条件に合致する本発明の実施例の試料であり、No.1〜5、およびNo.7の試料が比較例の試料である。
【0025】
【表1】

【0026】
各振動センサの試料の入出力端子5に、2.45GHzにおいて周波数を掃引した連続波を入射し、入出力端子5からの反射信号の強度、すなわちS11特性を測定した。図2は、本発明による振動センサの実施例および比較例のS11特性を測定した結果を示す図である。従来の通常の表面弾性波周波数フィルタにおいては、櫛歯電極の形状が最適となる条件は、前述のようにインピーダンスが50Ωに近く、Q値が高く、高次のモードが発生していないことである。従来の振動センサにおいては、この条件に近い表1のNo.5の櫛歯電極の振動センサが使用されていた。図2からわかるように、本実施例のNo.6、8、9の櫛歯電極の場合は比較例のものよりQ値が小さく、複数のピークを持ち、高次モードの発生も考えられるので振動センサには使用されていなかった。
【0027】
振動センサにおいて、振動による出力信号の変調度は櫛歯電極のインピーダンスの変化量から計算され、変調度が大きいほど感度が高い。変調度mは次の(1)式で計算される。R、Xはそれぞれインピーダンスの実部、虚部であり、ΔR、ΔXはそれぞれインピーダンスの実部、虚部の単位周波数あたりの変化量である。
【0028】
【数1】
【0029】
図3は本発明による振動センサの実施例および比較例の変調度を測定した結果を示す図である。図3からわかるように、No.9の実施例の振動センサが最も大きい変調度が得られ、高い感度が得られた。他の実施例においても比較例よりも大きな変調度が得られた。
【0030】
次に本発明による振動検知システムの一実施の形態について説明する。本実施の形態においては、振動センサは、図1のように、水晶基板4上に上記の実施の形態と同様な櫛歯電極1および入出力端子5を設けた本発明の振動センサを用い、さらに、図6に示した従来の振動センサと同様に、水晶基板4の一端を支持基板に支持することにより片持ち梁構造体を構成した。さらに、図7に示した従来の振動センサと同様に、入出力端子5に接続されたアンテナを有し、そのアンテナに電波信号を入力することにより電気信号を入力し、その電気信号が反射して前記アンテナから出力する電波信号の変化を検出することにより、入出力端子5から反射して出力する電気信号の変化を検出してインピーダンスの変化を検出するように構成されている。本実施の形態の振動検知システムは、図5に示した従来の振動検知システムと同様に、振動センサに電波信号を送信する機能と、振動センサから反射された電波信号を受信する機能とを有する質問器を備えている。
【0031】
対象となる振動の一例として、ガラスの割れを挙げて説明する。ガラスが割られると、AE波が発生する。このAE波をガラスに設置した本実施の形態の振動センサが受けると、振動センサは図6に示したような片持ち梁構造体の共振周波数で共鳴振動をする。ここで、片持ち梁構造体の共振周波数がAE波の周波数帯(通常50kHz以上)に合致するように、構造を設計する。片持ち梁構造体が共鳴振動をする場合、櫛歯電極の入出力端子に接続されたアンテナからみるインピーダンスは、櫛歯電極の電極指間隔が変化するので、その共鳴振動に同期して変化する。従って、質問器より振動センサのアンテナに送信された電波信号が反射され、振動センサのアンテナから出力する電波信号も、インピーダンスの変化に応じて変化する。
【0032】
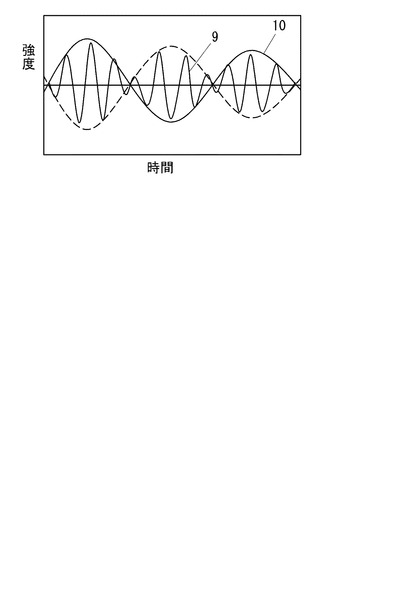
図4は、質問器から送信される連続的な電波信号に対して振動センサのアンテナから出力された電波信号の波形を模式的に示す図である。図4に示すように、ガラスが割られた場合には、質問器より送信された電波信号と同一の周波数成分を有する第1の波形9を基本波として、それが振動により包絡線状の第2の波形10に変調される。この第2の波形10の周期は、片持ち梁構造体の共振周波数に一致している。この反射電波信号の周波数スペクトルは、送信電波信号の周波数ピークを中心として、振動による共振周波数のピークが両側波帯に存在する形となる。質問器では、このような両側波帯に存在する振動の共振周波数と同一の周波数を検知した場合に、ガラスが割れたものと認知する。
【0033】
質問器と振動センサの間を上記のように無線で通信する場合は、次の(2)式により、通信距離Lが計算できる。
【0034】
【数2】
【0035】
ここで、λは電波信号の波長、Gaは質問器のアンテナ利得、Grは振動センサのアンテナ利得、Wtは送信電力、Weは受信電力、mは信号の変調度である。変調度mが大きい振動センサは、無線通信距離も大きいことがわかる。
【0036】
次に、本実施の形態の振動検知システムの実施例、および比較例を作製し、評価を行った結果を説明する。振動センサとしては、前記の表1に示した実施例および比較例の振動センサを用い、それを上述のように片持ち梁構造とし、さらにアンテナの設置を行って、それぞれの実施例、比較例の振動検知システムに用いる振動センサとした。質問器は共通とした。
【0037】
質問器により送信電波信号を10dBmの強度で送信し、振動センサを振動させ、反射電波信号を測定した。質問器との距離が同じ状態で比較したところ、反射電波信号の側波帯の電力レベルは、No.5の比較例の振動センサを用いた場合では、−70dBmであったのに対して、No.9の実施例の振動センサでは−60dBmであった。また、−75dBm以上の電力レベルがあった場合を受信可能と設定し、実施例、比較例の振動検知システムでの質問器と振動センサ間の無線通信可能距離を測定すると、表2のようになった。開口長180μm、電極指本数320本のNo.9の振動センサを用いた場合、開口長90μm、電極指本数160本のNo.5の振動センサを用いた場合に比べて、7%以上、通信可能距離が伸びることが確認された。
【0038】
【表2】
【0039】
本実施の形態の振動検知システムの実施例として、さらに電極指本数を増やし、開口長を大きくした櫛歯電極を使用した振動センサを用いた場合について評価を行った。電極指本数と開口長をそれぞれ、320本と270μm、480本と180μm、とした2つの振動センサを作製し、同様に片持ち梁構造とし、さらにアンテナの設置を行い、質問器との間で無線通信試験を行った。この結果、それぞれの無線通信可能距離は、上記のNo.9の振動センサと同程度であることが確認できた。電極指本数と開口長を更に拡大しても変調度は大きくならず、また、小型の振動センサの形状には収まらなくなることがわかった。したがって、電極指本数nは、160≦n≦480、開口長aは、90μm≦a≦270μm、すなわち、表面弾性波の波長Λに対する開口長の比rは、70≦r≦210が振動センサには最適といえる。
【0040】
また、振動センサとして、図6に示した従来の振動センサのように、櫛歯電極の両側に表面弾性波の反射器を設置して表面弾性波共振器の構成とした振動センサを作製し評価を行った。反射器として電極指が50本の反射器を設置した。この場合の櫛歯電極の形状は表1の試料と同じである。この場合でも、本発明による振動センサの上記条件内の電極指本数、開口長を有する実施例の振動センサを用いた場合、上記の反射器がない場合と同様に、比較例の振動センサと比べて無線通信距離の改善が観測された。
【0041】
なお、本発明は上記の実施の形態や実施例に限定されるものではないことはいうまでもなく、目的や用途に応じて設計変更可能である。例えば、一般的な振動センサとしては、その用途によっては片持ち梁構造であることは必須ではなく、また、無線通信を使用しない場合にはアンテナは不要である。
【符号の説明】
【0042】
1、64 櫛歯電極
2 開口長
3 表面弾性波の伝搬方向
4 水晶基板
5 入出力端子
9 第1の波形
10 第2の波形
20 センサ素子
22 支持基板
25 半田バンプ
27 端子
40、50 アンテナ
60 SAW共振子
62 圧電体基板
67 反射器
70 タグ基板
71 アンテナ導体
100 振動センサ
500 質問器
【技術分野】
【0001】
本発明は、対象物の振動現象を検出する振動センサ、およびその振動センサを用いたガラス破壊などによる振動の検知を行う振動検知システムに関する。
【背景技術】
【0002】
従来、振動センサは、建造物の耐震診断、防犯セキュリティ用のガラス破壊検知装置、或いは設備や工作機械の異常振動検知などに利用されている。その一例として、ガラス等の破壊時に生じるAE(アコースティックエミッション)波のように瞬時的な振動を検知する振動センサがあり、その従来例が特許文献1に記載されている。特許文献1では、圧電体基板上の表面弾性波素子を用いたセンサ素子とアンテナとを備えた振動センサと、この振動センサに電波を放出して反射波を検出する質問器を用いて振動センサをバッテリレスとしたガラス破壊などに伴う振動を検知するシステム、すなわち振動検知システムが記載されている。また、このシステムでは、振動検知処理機能を質問器側に設けたことから、振動センサから信号処理部などを省略することができ、振動センサの小型化が可能となっている。
【0003】
特許文献1の振動センサは、上述のように電源を必要としないこと、および小型化可能なことから、開閉式の窓にも取り付けられるという利点がある。図5に特許文献1に提案されている、従来の振動検知システムの一例のブロック構成図を示し、図6に従来の振動センサに使用するセンサ素子の構造の断面図を示し、図7に従来のセンサ素子とアンテナとが一体となった振動センサの斜視図をそれぞれ示す。
【0004】
図5に示されるように、この振動検知システムは、アンテナ40およびセンサ素子20からなる振動センサ100と、この振動センサ100を無線電波により駆動し、センシング結果を受信する質問器500とからなる。振動センサ100はRFID(Radio Frequency IDentification)技術を応用した小型化を可能とするセンサであり、図7に示されるように、センサ素子20とアンテナ40を構成する平板状のアンテナ導体71が平板状のタグ基板70(引用文献ではタグ基体)上に搭載されている。質問器500は送受信兼用のアンテナ50と送受信号分離のためのサーキュレータ、受信回路、送信回路などから構成されている。
【0005】
また、図6に示されるように、センサ素子20は水晶基板などの圧電体基板62と、圧電体基板62上に形成された櫛歯電極64およびその表面弾性波伝搬方向の両側に近接して設けられた反射器67とを備えたSAW共振子60を有している。圧電体基板62は、支持基板22により片持ち梁状に支持され、その支持部の根元に近いところに櫛歯電極64が位置しているので、圧電体基板62に生じた振動を櫛歯電極64の近傍に効率よく集中させることができる。SAW共振子60の櫛歯電極64は半田バンプ25を介して支持基板22の外側の端子27に接続され、端子27はアンテナ40に接続される。
【0006】
アンテナ部40にて受信した受信波は、センサ素子20の内部の櫛歯電極64まで供給され、受信波の周波数がSAW共振子60の共振周波数に一致したときは、受信波はSAW共振子60にエネルギーが閉じ込められるので、再びアンテナ40に戻る反射波は小さい。しかし、圧電体基板62に振動が加わると櫛歯電極64の電極指間隔が変化するのでSAW共振子60の共振周波数が変化し、そのインピーダンスが変化することにより、アンテナ40から反射波として振動センサ100の外部に送信されることとなる。反射波には圧電体基板62の振動周波数に対応したサイドローブが発生し、その反射波中のサイドローブを質問器500で検出することにより、振動が検出される。
【0007】
圧電体基板62を片持ち梁構造とし、その長さを選択して圧電体基板62の共振周波数を検出対象が発生する振動周波数帯に合わせると、検知対象物の振動が圧電体基板62で拡大され検出される。例えばガラスの破壊などに伴う振動現象の検出に適用するような場合、ガラスの破壊に伴う振動自体は2msec程度の間しか持続しないのに対して、ガラス破壊に伴う振動に特徴的な周波数帯域に属するように圧電体基板62の共振周波数を合わせることで、ガラス破壊に伴う振動自体が止まったあとであっても、圧電体基板62の振動を2msecよりも持続させることができ、振動検知の確度が向上する。
【0008】
ここで、表面弾性波素子は従来より様々なデバイスに用いられており、特に周波数フィルタなどに多く用いられている。これらの従来の表面弾性波素子においては、表面弾性波を発生させる櫛歯電極の入力インピーダンスは、駆動周波数において50Ω程度となるように設計されるのが一般的である。また、表面弾性波共振器により周波数フィルタを構成する場合、櫛歯電極の電極指の本数が多すぎると高次の共振モードが発生する。通常はこの高次モードはスプリアス(不要波)の原因となるが、特許文献2に記載の弾性表面波フィルタのようにこの高次モードをフィルタ特性に利用する場合もある。
【0009】
従来、上記の振動センサに用いる表面弾性波素子においても、その櫛歯電極は周波数フィルタなどの表面弾性波素子において用いられる櫛歯電極と同様な設計を行っていた。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−232708号公報
【特許文献2】特開平1−231417号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
特許文献1の振動センサはバッテリレスであるため、検出結果の電気信号を無線で通信する振動検知システムにおいて通信距離を拡大するためには、振動センサから出力される信号の強度を大きくする必要がある。また、この振動センサは、振動により生ずる櫛歯電極のインピーダンス変化により振動を検出するため、検出信号強度を大きくするためにはそのインピーダンス変化量を大きくするよう櫛歯電極の設計を行う必要がある。
【0012】
しかし、上記のように、従来の振動センサの櫛歯電極は、他の表面弾性波素子と同様に、主として駆動周波数においてインピーダンスが50Ω程度となるような設計のみを行っており、振動に対するインピーダンス変化に着目した設計は行われていなかった。このため、この振動センサを用いた振動検知システムにおける通信距離は十分ではなかった。
【0013】
そこで、本発明の課題は、振動が印加された場合のインピーダンス変化が大きい振動センサと、この振動センサを用いた通信距離の拡大が可能な振動検知システムを提供することにある。
【課題を解決するための手段】
【0014】
上記課題を解決するため、本発明による振動センサは、水晶基板と、前記水晶基板上に形成された一対の入出力端子と、前記入出力端子に接続された表面弾性波を励振するための一対の櫛歯電極とを有し、前記入出力端子に電気信号を入力し、前記入出力端子から反射して出力する前記電気信号の変化を検出することにより前記水晶基板に生じた振動により生ずる前記入出力端子のインピーダンスの変化を検出して前記水晶基板の振動を検出する振動センサにおいて、前記櫛歯電極の電極指の本数をn、前記櫛歯電極により励振する表面弾性波の波長に対する前記櫛歯電極の開口長の比をrとするとき、160≦n≦480、70≦r≦210であって、かつ、n×r≧18000であることを特徴とする。
【0015】
また、前記水晶基板が支持基板に一端を支持されることにより片持ち梁構造体が構成されていてもよい。
【0016】
また、前記入出力端子に接続されたアンテナを有し、前記アンテナに電波信号を入力することにより前記電気信号を入力し、前記電気信号が反射して前記アンテナから出力する電波信号の変化を検出することにより、前記入出力端子から反射して出力する前記電気信号の変化を検出して前記インピーダンスの変化を検出してもよい。
【0017】
本発明による振動検知システムは、前記の振動センサと、前記の振動センサに前記電波信号を送信する機能と前記の振動センサから反射された電波信号を受信する機能とを有する質問器を備えている。
【発明の効果】
【0018】
本発明は、発明者らが、目的とする振動検知システムにおける振動センサの感度、すなわち、振動が印加された時の櫛歯電極のインピーダンス変化が大きくなるような櫛歯電極の設計指針を見出したことに基づくものである。本発明の振動センサにおいて、櫛歯電極の電極指の本数n、前記櫛歯電極により励振する表面弾性波の波長に対する前記櫛歯電極の開口長の比rを上記のように設定することにより、従来の櫛歯電極に比べて振動が印加された時のインピーダンス変化を大きくできる。
【0019】
すなわち、本発明により、振動が印加された場合のインピーダンス変化が大きい振動センサと、この振動センサを用いた通信距離の拡大が可能な振動検知システムが得られる。
【図面の簡単な説明】
【0020】
【図1】本発明による振動センサの一実施の形態の模式的な平面図。
【図2】本発明による振動センサの実施例および比較例のS11特性を測定した結果を示す図。
【図3】本発明による振動センサの実施例および比較例の変調度を測定した結果を示す図。
【図4】質問器から送信される連続的な電波信号に対して振動センサのアンテナから出力された電波信号の波形を模式的に示す図。
【図5】従来の振動検知システムの一例のブロック構成図。
【図6】従来の振動センサに使用するセンサ素子の構造の断面図。
【図7】従来のセンサ素子とアンテナとが一体となった振動センサの斜視図。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。図1は、本発明による振動センサの一実施の形態の模式的な平面図である。本実施の形態においては、水晶基板4と、水晶基板4上に形成された一対の入出力端子5と、入出力端子5に接続された表面弾性波を励振するための一対の櫛歯電極1とを有している。入出力端子5に電気信号を入力し、入出力端子5から反射して出力する前記電気信号の変化を検出することによって、水晶基板4に生じた振動により生ずる入出力端子5のインピーダンスの変化を検出して水晶基板4の振動を検出する。
【0022】
ここで、本実施の形態においては、櫛歯電極1により励振する表面弾性波の励振周波数を2.45GHzとする。この場合、櫛歯電極1により励振する表面弾性波の波長Λは約1.28μmとなる。また、本実施の形態では、櫛歯電極1の開口長2を90μm〜270μmとし、櫛歯電極1により励振する表面弾性波の波長Λに対する櫛歯電極1の開口長の比rが、70≦r≦210、となるようにしている。さらに、櫛歯電極1の表面弾性波の伝搬方向3の方向に配置された電極指の本数nは、160≦n≦480となるように設定されている。また、n×r≧18000となっている。
【0023】
また、本実施の形態の振動センサにおいて、図6に示した従来の振動センサと同様に、水晶基板4の一端を支持基板に支持することにより片持ち梁構造体を構成し、振動検知確度の向上を図ることができる。
【0024】
次に、本実施の形態に示した構成の振動センサを作製し、評価を行った具体的な実施例について説明する。水晶ウエハ上に公知のスパッタリング技術、フォトリソグラフィ技術により、Ti/Al層からなる櫛歯電極1を形成した。櫛歯電極1の表面弾性波の励振周波数が2.45GHzとなるように電極指幅、および電極指間の間隔は0.32μmとした。尚、Ti/Al層の厚みは、適度な電気機械結合係数を得るために70nmとすることが望ましい。櫛歯電極1は、比較のため、上記のnおよびrに対する条件を満たす実施例の形状以外の比較例も同時に作製し、評価を行った。具体的には、表1に示すように、電極指の本数nを80、160、320本とし、開口長を45、90、180μmとして、それらを組み合わせたNo.1からNo.9の9種類の振動センサの試料を作製した。表1において、No.6、8、9が上記の条件に合致する本発明の実施例の試料であり、No.1〜5、およびNo.7の試料が比較例の試料である。
【0025】
【表1】
【0026】
各振動センサの試料の入出力端子5に、2.45GHzにおいて周波数を掃引した連続波を入射し、入出力端子5からの反射信号の強度、すなわちS11特性を測定した。図2は、本発明による振動センサの実施例および比較例のS11特性を測定した結果を示す図である。従来の通常の表面弾性波周波数フィルタにおいては、櫛歯電極の形状が最適となる条件は、前述のようにインピーダンスが50Ωに近く、Q値が高く、高次のモードが発生していないことである。従来の振動センサにおいては、この条件に近い表1のNo.5の櫛歯電極の振動センサが使用されていた。図2からわかるように、本実施例のNo.6、8、9の櫛歯電極の場合は比較例のものよりQ値が小さく、複数のピークを持ち、高次モードの発生も考えられるので振動センサには使用されていなかった。
【0027】
振動センサにおいて、振動による出力信号の変調度は櫛歯電極のインピーダンスの変化量から計算され、変調度が大きいほど感度が高い。変調度mは次の(1)式で計算される。R、Xはそれぞれインピーダンスの実部、虚部であり、ΔR、ΔXはそれぞれインピーダンスの実部、虚部の単位周波数あたりの変化量である。
【0028】
【数1】
【0029】
図3は本発明による振動センサの実施例および比較例の変調度を測定した結果を示す図である。図3からわかるように、No.9の実施例の振動センサが最も大きい変調度が得られ、高い感度が得られた。他の実施例においても比較例よりも大きな変調度が得られた。
【0030】
次に本発明による振動検知システムの一実施の形態について説明する。本実施の形態においては、振動センサは、図1のように、水晶基板4上に上記の実施の形態と同様な櫛歯電極1および入出力端子5を設けた本発明の振動センサを用い、さらに、図6に示した従来の振動センサと同様に、水晶基板4の一端を支持基板に支持することにより片持ち梁構造体を構成した。さらに、図7に示した従来の振動センサと同様に、入出力端子5に接続されたアンテナを有し、そのアンテナに電波信号を入力することにより電気信号を入力し、その電気信号が反射して前記アンテナから出力する電波信号の変化を検出することにより、入出力端子5から反射して出力する電気信号の変化を検出してインピーダンスの変化を検出するように構成されている。本実施の形態の振動検知システムは、図5に示した従来の振動検知システムと同様に、振動センサに電波信号を送信する機能と、振動センサから反射された電波信号を受信する機能とを有する質問器を備えている。
【0031】
対象となる振動の一例として、ガラスの割れを挙げて説明する。ガラスが割られると、AE波が発生する。このAE波をガラスに設置した本実施の形態の振動センサが受けると、振動センサは図6に示したような片持ち梁構造体の共振周波数で共鳴振動をする。ここで、片持ち梁構造体の共振周波数がAE波の周波数帯(通常50kHz以上)に合致するように、構造を設計する。片持ち梁構造体が共鳴振動をする場合、櫛歯電極の入出力端子に接続されたアンテナからみるインピーダンスは、櫛歯電極の電極指間隔が変化するので、その共鳴振動に同期して変化する。従って、質問器より振動センサのアンテナに送信された電波信号が反射され、振動センサのアンテナから出力する電波信号も、インピーダンスの変化に応じて変化する。
【0032】
図4は、質問器から送信される連続的な電波信号に対して振動センサのアンテナから出力された電波信号の波形を模式的に示す図である。図4に示すように、ガラスが割られた場合には、質問器より送信された電波信号と同一の周波数成分を有する第1の波形9を基本波として、それが振動により包絡線状の第2の波形10に変調される。この第2の波形10の周期は、片持ち梁構造体の共振周波数に一致している。この反射電波信号の周波数スペクトルは、送信電波信号の周波数ピークを中心として、振動による共振周波数のピークが両側波帯に存在する形となる。質問器では、このような両側波帯に存在する振動の共振周波数と同一の周波数を検知した場合に、ガラスが割れたものと認知する。
【0033】
質問器と振動センサの間を上記のように無線で通信する場合は、次の(2)式により、通信距離Lが計算できる。
【0034】
【数2】
【0035】
ここで、λは電波信号の波長、Gaは質問器のアンテナ利得、Grは振動センサのアンテナ利得、Wtは送信電力、Weは受信電力、mは信号の変調度である。変調度mが大きい振動センサは、無線通信距離も大きいことがわかる。
【0036】
次に、本実施の形態の振動検知システムの実施例、および比較例を作製し、評価を行った結果を説明する。振動センサとしては、前記の表1に示した実施例および比較例の振動センサを用い、それを上述のように片持ち梁構造とし、さらにアンテナの設置を行って、それぞれの実施例、比較例の振動検知システムに用いる振動センサとした。質問器は共通とした。
【0037】
質問器により送信電波信号を10dBmの強度で送信し、振動センサを振動させ、反射電波信号を測定した。質問器との距離が同じ状態で比較したところ、反射電波信号の側波帯の電力レベルは、No.5の比較例の振動センサを用いた場合では、−70dBmであったのに対して、No.9の実施例の振動センサでは−60dBmであった。また、−75dBm以上の電力レベルがあった場合を受信可能と設定し、実施例、比較例の振動検知システムでの質問器と振動センサ間の無線通信可能距離を測定すると、表2のようになった。開口長180μm、電極指本数320本のNo.9の振動センサを用いた場合、開口長90μm、電極指本数160本のNo.5の振動センサを用いた場合に比べて、7%以上、通信可能距離が伸びることが確認された。
【0038】
【表2】
【0039】
本実施の形態の振動検知システムの実施例として、さらに電極指本数を増やし、開口長を大きくした櫛歯電極を使用した振動センサを用いた場合について評価を行った。電極指本数と開口長をそれぞれ、320本と270μm、480本と180μm、とした2つの振動センサを作製し、同様に片持ち梁構造とし、さらにアンテナの設置を行い、質問器との間で無線通信試験を行った。この結果、それぞれの無線通信可能距離は、上記のNo.9の振動センサと同程度であることが確認できた。電極指本数と開口長を更に拡大しても変調度は大きくならず、また、小型の振動センサの形状には収まらなくなることがわかった。したがって、電極指本数nは、160≦n≦480、開口長aは、90μm≦a≦270μm、すなわち、表面弾性波の波長Λに対する開口長の比rは、70≦r≦210が振動センサには最適といえる。
【0040】
また、振動センサとして、図6に示した従来の振動センサのように、櫛歯電極の両側に表面弾性波の反射器を設置して表面弾性波共振器の構成とした振動センサを作製し評価を行った。反射器として電極指が50本の反射器を設置した。この場合の櫛歯電極の形状は表1の試料と同じである。この場合でも、本発明による振動センサの上記条件内の電極指本数、開口長を有する実施例の振動センサを用いた場合、上記の反射器がない場合と同様に、比較例の振動センサと比べて無線通信距離の改善が観測された。
【0041】
なお、本発明は上記の実施の形態や実施例に限定されるものではないことはいうまでもなく、目的や用途に応じて設計変更可能である。例えば、一般的な振動センサとしては、その用途によっては片持ち梁構造であることは必須ではなく、また、無線通信を使用しない場合にはアンテナは不要である。
【符号の説明】
【0042】
1、64 櫛歯電極
2 開口長
3 表面弾性波の伝搬方向
4 水晶基板
5 入出力端子
9 第1の波形
10 第2の波形
20 センサ素子
22 支持基板
25 半田バンプ
27 端子
40、50 アンテナ
60 SAW共振子
62 圧電体基板
67 反射器
70 タグ基板
71 アンテナ導体
100 振動センサ
500 質問器
【特許請求の範囲】
【請求項1】
水晶基板と、前記水晶基板上に形成された一対の入出力端子と、前記入出力端子に接続された表面弾性波を励振するための一対の櫛歯電極とを有し、前記入出力端子に電気信号を入力し、前記入出力端子から反射して出力する前記電気信号の変化を検出することにより前記水晶基板に生じた振動により生ずる前記入出力端子のインピーダンスの変化を検出して前記水晶基板の振動を検出する振動センサにおいて、前記櫛歯電極の電極指の本数をn、前記櫛歯電極により励振する表面弾性波の波長に対する前記櫛歯電極の開口長の比をrとするとき、160≦n≦480、70≦r≦210であって、かつ、n×r≧18000であることを特徴とする振動センサ。
【請求項2】
前記水晶基板が支持基板に一端を支持されることにより片持ち梁構造体が構成されていることを特徴とする請求項1に記載の振動センサ。
【請求項3】
前記入力端子に接続されたアンテナを有し、前記アンテナに電波信号を入力することにより前記電気信号を入力し、前記電気信号が反射して前記アンテナから出力する電波信号の変化を検出することにより、前記入出力端子から反射して出力する前記電気信号の変化を検出して前記インピーダンスの変化を検出することを特徴とする請求項1または2に記載の振動センサ。
【請求項4】
請求項3に記載の振動センサと、請求項3に記載の振動センサに前記電波信号を送信する機能と、請求項3に記載の振動センサから反射された電波信号を受信する機能とを有する質問器を備えた振動検知システム。
【請求項1】
水晶基板と、前記水晶基板上に形成された一対の入出力端子と、前記入出力端子に接続された表面弾性波を励振するための一対の櫛歯電極とを有し、前記入出力端子に電気信号を入力し、前記入出力端子から反射して出力する前記電気信号の変化を検出することにより前記水晶基板に生じた振動により生ずる前記入出力端子のインピーダンスの変化を検出して前記水晶基板の振動を検出する振動センサにおいて、前記櫛歯電極の電極指の本数をn、前記櫛歯電極により励振する表面弾性波の波長に対する前記櫛歯電極の開口長の比をrとするとき、160≦n≦480、70≦r≦210であって、かつ、n×r≧18000であることを特徴とする振動センサ。
【請求項2】
前記水晶基板が支持基板に一端を支持されることにより片持ち梁構造体が構成されていることを特徴とする請求項1に記載の振動センサ。
【請求項3】
前記入力端子に接続されたアンテナを有し、前記アンテナに電波信号を入力することにより前記電気信号を入力し、前記電気信号が反射して前記アンテナから出力する電波信号の変化を検出することにより、前記入出力端子から反射して出力する前記電気信号の変化を検出して前記インピーダンスの変化を検出することを特徴とする請求項1または2に記載の振動センサ。
【請求項4】
請求項3に記載の振動センサと、請求項3に記載の振動センサに前記電波信号を送信する機能と、請求項3に記載の振動センサから反射された電波信号を受信する機能とを有する質問器を備えた振動検知システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−78331(P2012−78331A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−226757(P2010−226757)
【出願日】平成22年10月6日(2010.10.6)
【出願人】(000134257)NECトーキン株式会社 (1,832)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年10月6日(2010.10.6)
【出願人】(000134257)NECトーキン株式会社 (1,832)
【Fターム(参考)】
[ Back to top ]