
振動デバイス、並びに発振器、および電子機器
【課題】動作温度範囲内(−40℃から+85℃)における周波数変動量を10ppm以内とすることのできる圧電デバイスを提供する。
【解決手段】3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ1でありγ1>0である第1の共振子14と、第1の共振子14に接続され、3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ2でありγ2>0である第2の共振子16とを備え、第1の共振子14と第2の共振子16との間における変曲点の差が19℃以下であり、0<|γ1|≦|2.4γ2|の関係を満たすことを特徴とする。
【解決手段】3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ1でありγ1>0である第1の共振子14と、第1の共振子14に接続され、3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ2でありγ2>0である第2の共振子16とを備え、第1の共振子14と第2の共振子16との間における変曲点の差が19℃以下であり、0<|γ1|≦|2.4γ2|の関係を満たすことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、振動デバイス、並びにこの振動デバイスを実装した発振器、および電子機器に係り、特に周波数温度特性が良好な振動デバイス、並びに発振器、および電子機器に関する。
【背景技術】
【0002】
圧電デバイスの中において特に、弾性表面波(SAW:surface acoustic wave)デバイスでは、ストップバンドの上端モードの共振を利用することで、周波数温度特性が向上することが知られている。
【0003】
特許文献1には、特定のカット角で切り出された水晶基板上に、ストップバンドの上端モードで励振可能なIDTを形成する際、IDTの電極指間に溝を設け、この溝の深さGや、電極指のライン占有率ηを適格に定めるSAW共振子が開示されている。特許文献1に開示されている条件に従ってSAW共振子を製造することによれば、良好な周波数温度特性を得ることができ、耐環境特性、およびQ値の向上を図ることができるという。
【0004】
また、周波数温度特性の改善技術としては、2つのSAW共振子を電気的に接続することで、2つの周波数温度特性を合成する技術が知られている。例えば特許文献2に開示されている技術は、2次関数温度特性を持ち、それぞれ頂点温度が異なる2つのSAW共振子を、いわゆる横結合させることで、結合状態で得られる周波数温度特性カーブを平坦なものとするというものである。また、非特許文献1には、周波数温度特性を改善させるために、2つの1ポートSAW共振子を連続接続する構成が開示されている。具体的には、各1ポートSAW共振子に対して並列にインダクタを接続した構成や、当該インダクタを排除した構成(並列コンデンサを備える場合がある)が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2010/098139号
【特許文献2】特開平9−298446号公報
【非特許文献】
【0006】
【非特許文献1】G.Martin、H.Schmidt B.Wall「IMPROVED TEMPERATURE STABILITY OF ONE−PORT SAW RESONATORS ACHIEVED WITHOUT COILS」、2007IEEE Ultrasonics Symposium、p925−928
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記のような構成圧電デバイスによれば、確かに、従来のSAWデバイスに比べて周波数温度特性の向上を図ることができると考えられる。しかし、特許文献1に開示されているSAWデバイスは、3次温度特性を示すものの、−40℃から+85℃の範囲において、周波数変動量は±25ppm以内とするものであり、特許文献2、非特許文献1に開示されているSAWデバイスではさらに周波数変動量が大きなものとなる。
【0008】
本発明は、動作温度範囲内(例えば、−40℃から+85℃)において、従来に比べて周波数温度特性をさらに向上させることのできる振動デバイス、およびこの振動デバイスを搭載した発振器、並びに電子機器を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0010】
[適用例1]3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ1でありγ1>0である第1の振動子と、前記第1の振動子に接続され、3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ2でありγ2>0である第2の振動子とを備え、前記第1の振動子と前記第2の振動子との間における変曲点の差が19℃以下であり、0<|γ1|≦|2.4γ2|の関係を満たすことを特徴とする振動デバイス。
このような特徴を有する振動デバイスであれば、動作温度範囲内における周波数変動量を従来よりもさらに向上させることができる。
【0011】
[適用例2]適用例1に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とは互いに、オイラー角(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|49.75°)の水晶基板上に設けられ、ストップバンドの上端モードの弾性表面波を励起する弾性表面波共振子であり、前記弾性表面波を励起する励振電極を構成する電極指間に溝を備え、前記第1の振動子における前記電極指間の溝深さをG1、前記第2の振動子における前記電極指間の溝深さをG2とした場合に、G1<G2の関係を満たすことを特徴とする振動デバイス。
このような特徴を有する振動デバイスによれば、同じカット角の基板を利用してデバイスを製造することができる。
【0012】
[適用例3]適用例2に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とを単一の圧電基板上に設けたことを特徴とする振動デバイス。
このような特徴を有する振動デバイスによれば、1つの素子として周波数変動量が非常に小さいデバイスを製造することができる。
【0013】
[適用例4]適用例3に記載の振動デバイスであって、前記圧電基板上に段差を備え、前記段差は、前記圧電基板を平面視して前記第1の振動子と前記第2の振動子との間に設けることを特徴とする振動デバイス。
このような特徴を有する振動デバイスによれば、段差部分にて、第1の振動子と第2の振動子との間を伝播する不要波を抑圧することができる。また、第1の振動子と第2の振動子との間における不要な音響結合を低減することも可能となる。
【0014】
[適用例5]適用例1乃至適用例4のいずれか1例に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とが電気的に並列に接続されていることを特徴とする振動デバイス。
【0015】
[適用例6]適用例5に記載の振動デバイスであって、電気的に並列に接続された前記第1の振動子と前記第2の振動子と電気的に並列となるようにコンデンサを接続したことを特徴とする振動デバイス。
このような特徴を有することによれば、コンデンサの容量により、第1の振動子と第2の振動子との間の結合度を変化させることができる。
【0016】
[適用例7]適用例1乃至適用例4のいずれか1例に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とが電気的に直列に接続されていることを特徴とする振動デバイス。
【0017】
[適用例8]適用例7に記載の振動デバイスであって、電気的に直列に接続された前記第1の振動子と前記第2の振動子のそれぞれに対し、電気的に並列となるようにインダクタを接続したことを特徴とする振動デバイス。
このような特徴を有することによれば、インダクタの値を変化させることで、第1の振動子と第2の振動子との間の結合度を変化させることができる。
【0018】
[適用例9]適用例1乃至適用例8のいずれか1例に記載の振動デバイスと、発振回路とを有することを特徴とする発振器。
このような特徴を有する発振器によれば、上記構成に基づく効果を得ることができ、広い動作温度範囲内において、高精度な発振を実現することができ、信頼性を向上させることができる。
【0019】
[適用例10]適用例1乃至適用例8のいずれか1例に記載の振動デバイスを搭載したことを特徴とする電子機器。
このような特徴を有する電子機器によれば、広い動作温度範囲内において信頼性の高い電子機器を提供することが可能となる。
【0020】
[適用例11]3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ1でありγ1>0である第1の振動子を製造する工程と、3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ2でありγ2>0である第2の振動子を製造する工程と、製造された第1の振動子群と第2の振動子群の中から、変曲点の差が19℃以下であり、0<|γ2|≦|2.4γ1|の関係を満たす第1の振動子と第2の振動子の組み合わせを選定する工程と、選定された前記第1の振動子と前記第2の振動子とを接続する工程とを有することを特徴とする振動デバイスの製造方法。
このような特徴を有する振動デバイスの製造方法によれば、周波数温度特性が良好となる第1の振動子と第2の振動子を適宜組み合わせることができる。このため、製造後の不良が減少し、歩留まりを向上させることができる。
【図面の簡単な説明】
【0021】
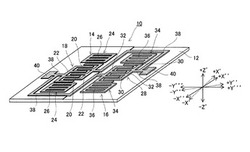
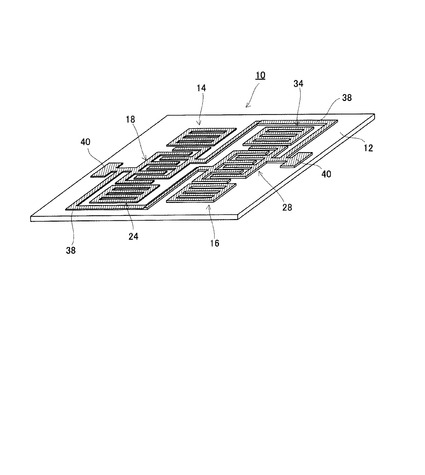
【図1】実施形態に係るSAWデバイスの構成を示す斜視図である。
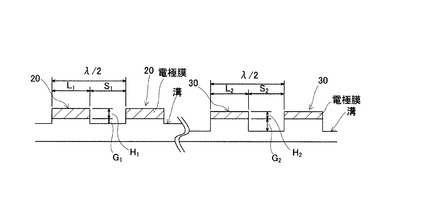
【図2】実施形態に係るSAWデバイスにおける第1の共振子と第2の共振子の溝深さG1,G2、電極膜厚H1,H2、電極指幅L1,L2、溝幅S1,S2、および波長λの関係を示す断面図である。
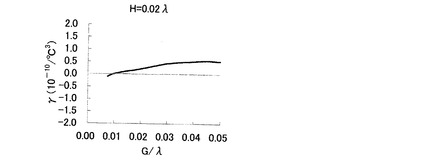
【図3】電極膜厚Hが0.02λの場合における溝深さGと3次温度係数γの関係を示すグラフである。
【図4】電極膜厚Hが0.03λの場合における溝深さGと3次温度係数γの関係を示すグラフである。
【図5】電極膜厚Hが0.04λの場合における溝深さGと3次温度係数γの関係を示すグラフである。
【図6】ライン占有率ηと変曲点Tiの関係を示すグラフである。
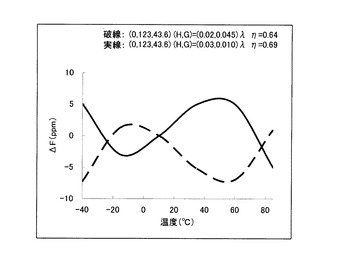
【図7】特定条件下における第1の共振子の周波数温度特性と第2の共振子の周波数温度特性を示すグラフである。
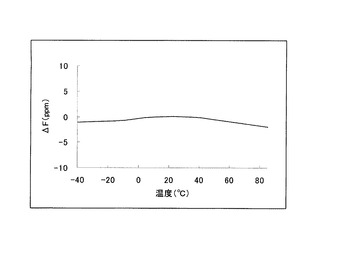
【図8】特定条件下における第1の共振子の周波数温度特性と第2の共振子の周波数温度特性とを結合させることで得られる周波数温度特性を示すグラフである。
【図9】2つのSAW共振子間における変曲点Tiの差分温度と周波数変動量の関係を示すグラフである。
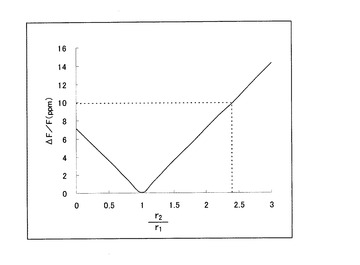
【図10】2つのSAW共振子間における3次温度係数γの割合と周波数変動量の関係を示すグラフである。
【図11】実施形態に係るSAWデバイスの変形例を示す斜視図である。
【図12】外付け素子としてコンデンサを設ける場合の回路図である。
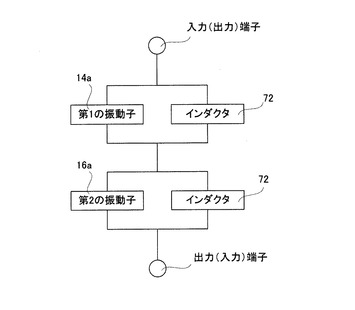
【図13】外付け素子としてインダクタを設ける場合の回路図である。
【図14】実施形態に係る圧電デバイスを搭載した発振器の構成を示す平面図である。
【発明を実施するための形態】
【0022】
以下、本発明の振動デバイス、発振器、および電子機器に係る実施の形態について、図面を参照しつつ詳細に説明する。なお、本実施形態では、振動デバイスの一例として、圧電デバイス、特に弾性表面波デバイス(以下、単にSAWデバイスと称す)を例に挙げて説明する。
【0023】
図1に示すように、本実施形態に係る弾性表面波デバイス(以下、単にSAWデバイス10と称す)は、水晶基板12と、この水晶基板12上に形成された2つのSAW共振子(第1の共振子(第1の振動子)14、第2の共振子(第2の振動子)16)を基本として構成される。第1の共振子14と第2の共振子16は互いにIDT18,28、反射器24,34を基本として構成され、引出電極38を介して入出力電極40に接続される。
【0024】
水晶基板12は、オイラー角表示で(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|≦49.75°)で表される面内回転STカット水晶基板を採用している。なお、オイラー角(0°、0°、0°)で表される基板は、Z軸に垂直な主面を有するZカット基板となる。ここで、オイラー角(φ、θ、ψ)のφは、Zカット基板の第1の回転に関するものであり、Z軸を回転軸とし、+X軸から+Y軸側へ回転する方向を正の回転角度とした第1回転角度である。θは、Zカット基板の第1の回転後に行う第2の回転に関するものであり、第1の回転後のX軸(=X´軸)を回転軸とし、第1の回転後の+Y軸(=+Y´軸)から+Z軸へ回転する方向を正の回転角度とした第2の回転角度である。圧電基板のカット面は、第1回転角度φと第2回転角度θとで決定される。ψは、Zカット基板の第2の回転後に行う第3の回転に関するものであり、第2の回転後のZ軸(=Z´軸)を回転軸とし、第2の回転後の+X軸(=+X´軸)から第2の回転後の+Y軸(+Y´´軸)側へ回転する方向を正の回転角度とした第3回転角度である。SAWの伝搬方向は、第2の回転後のX軸(=X´軸)に対する第3回転角度ψで表される。
【0025】
本実施形態においてIDT18とIDT28は互いに、1つの水晶基板12上に形成されている。各IDT18,28は、一対の櫛歯状電極を備える。櫛歯状電極は、複数の電極指20,30の基端部をそれぞれバスバー22,32で接続して成る。IDT18,28は、櫛歯状電極における電極指20,30同士をかみ合わせるように配置すると共に、隣接する電極指20,30間に所定の間隔が設けられるように櫛歯状電極を組み合わせることで構成される。本実施形態では、櫛歯状電極を構成する電極指20,30のバスバー22,32からの延出方向は、水晶の結晶軸であるX軸から傾きを持ったX´軸に直交するように設けられる。第1の共振子14、第2の共振子16で励起されるSAWは、Rayleigh型のSAWであり、Z´軸とX´´軸の両方に振動変位成分を有する。そしてこのようにSAWの伝播方向を水晶の結晶軸であるX軸からずらすことで、ストップバンドの上端モードのSAWを励起することが可能となる。また、本願発明者はこのように、水晶基板のカット角をオイラー角表示で(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|≦49.75°)とした上で、ストップバンドの上端モードを用いることで、SAW共振子において3次関数で示すことのできる周波数温度特性を得ることができることを確認した。
【0026】
反射器24,34は、各IDT18,28をSAWの伝播方向に挟み込むように一対ずつ設けられる。具体的構成としては、IDT18,28を構成する電極指20,30と平行に設けられる複数の導体ストリップ26,36の両端をそれぞれ接続したものである。複数の導体ストリップ26,36をそれぞれ接続する位置は必ずしも両端である必要はなく、一端のみで接続する形態や、一端と他端との間の何れかの位置で接続する形態などであっても良い。
【0027】
なお、水晶基板12のSAW伝播方向の端面からの反射波を積極的に利用する端面反射型SAW共振子や、IDTの電極指対数を多くすることでIDT自体でSAWの定在波を励起する多対IDT型SAW共振子においては、反射器は必ずしも必要では無い。
【0028】
入出力電極40は、入力ポート(または出力ポート)用と出力ポート(または入力ポート)用に、一対設けられたパターン電極である。
引出電極38は、2つのIDT18,28と一対の入出力電極40とを電気的に並列に接続するパターン電極である。本実施形態では、入出力電極40を介して印加された電圧により2つのIDT18,28にて励起される双方のSAWの位相が、一致または略一致するように、引出電極38が配される。これらのIDT18,28、反射器24,34、入出力電極40、および引出電極38等を構成するパターン電極は、アルミニウム(Al)や、Alを主体とした合金を構成材料として用いることができる。
【0029】
本実施形態に係るSAWデバイス10は、IDT18(具体的には櫛歯状電極)を構成する複数の電極指20の間、およびIDT28を構成する複数の電極指30の間に溝を設けている。溝深さGはSAWデバイスの3次温度係数γに影響を及ぼし、一般的には、3次温度係数の値(絶対値)が小さいほど、周波数温度特性が良好となることが知られている。
【0030】
図2は、図1に示した本実施形態に係るSAWデバイス10におけるIDT18を構成する電極指20と、IDT28を構成する電極指30の部分断面拡大図である。図2中λは、IDT18、およびIDT28におけるSAWの波長を示す。また、L1は電極指20の幅、L2は電極指30の幅を示し、S1は隣接する電極指20間に形成される溝の幅、S2は隣接する電極指30間に形成される溝の幅を示す。さらに、G1はIDT20における溝深さ、G2はIDT30における溝深さを示し、H1はIDT20における電極膜厚、H2はIDT30における電極膜厚を示す。なお、以下に示すライン占有率η(η1,η2)とは、電極指の幅L(L1,L2),を電極指間のピッチλ/2(=L1+S1またはL2+S2)で除して得られる値である。
【0031】
3次温度係数γと溝深さGとの関係は、オイラー角表示で第3回転角度を示すψについて、|42°〜45°|の範囲で、周波数温度特性が最も良好となる角度を適宜選択してシミュレーションを実施することで、図3から図5に示すようなグラフを得ることができる。なお、図3から図5において横軸は、弾性表面波の波長λに対する溝深さGの割合を示し、縦軸は、3次温度係数γの値を示す。また、図3は励振電極を構成する電極の膜厚(電極膜厚H)を0.02λとした場合の例を示すグラフである。また、図4は励振電極を構成する電極の膜厚(電極膜厚H)を0.03λとした場合の例を示すグラフである。また、図5は励振電極を構成する電極の膜厚(電極膜厚H)を0.04λとした場合の例を示すグラフである。
【0032】
電極膜厚Hを0.02λとした図3によれば、溝深さGが0.01λである点付近において、3次温度係数の正負が逆転していることを読み取ることができる。
【0033】
また、電極膜厚Hを0.03λとした図4によれば、溝深さGが0.015λである点付近において、3次温度係数の正負が逆転していることを読み取ることができる。
【0034】
さらに、電極膜厚Hを0.04λとした図5によれば、溝深さGが0.013λである点付近において、3次温度係数の正負が逆転していることを読み取ることができる。
【0035】
また、図3から図5に示すシミュレーションによれば、溝深さGが0.01λ〜0.05λの範囲においてはいずれも、3次温度係数γが、−0.1(10−10/℃3)〜+0.1(10−10/℃3)の範囲内であることを読み取ることができる。さらに、図3から図5によれば、3次温度係数が負の値となる場合には、3次温度係数が正の値となる場合に比べ、溝深さGが浅くなるということを読み取ることができる。
【0036】
なお、図3から図5に示すグラフを得るためのシミュレーションは、IDTにおける電極指の対数が210対、反射器の導体ストリップが97本(片側当たり)のSAW共振子をモデルとして行った。
【0037】
また、電極指の対数、導体ストリップの本数を共通とし、電極膜厚を0.02λ、溝深さGを0.05λとしたSAW共振子をモデルとして、ライン占有率ηと、変曲点Tiとの関係のシミュレーションを実施した結果、図6に示すようなグラフを得ることができた。図6によれば、ライン占有率ηの変動に応じて変曲点Tiの値が、対数関数的に変化することを読み取ることができる。さらに、変曲点Tiの変動は、ライン占有率ηが0.63未満である場合には急激な変化を示し、0.63以上では、穏やかな変化を示すことも読み取ることができる。なお、溝深さGが0.05λ以外の場合でも、ライン占有率ηにより変曲点Tiを変えることができる。
【0038】
これらの結果より、第1の共振子14と第2の共振子16との間において、IDT18,28を構成する電極指20,30間の溝深さGを異ならせることにより、3次温度係数の符号を互いに逆にし、周波数温度特性を示す3次曲線を逆転させることができる。
また、周波数温度特性を示す3次曲線から読み取ることのできる変曲点については、ライン占有率ηを調整することで制御することができる。
【0039】
よって、第1の共振子14における周波数温度特性と、第2の共振子16における周波数温度特性の3次温度係数の符号の正負を互いに逆の関係とし、これを結合させることによれば、フラットな、すなわち周波数変動量の少ない周波数温度特性を得ることができる。ここで、第1の共振子14における3次温度係数を−γ1、第2の共振子16における3次温度係数をγ2とし、γ1、γ2はそれぞれ、γ1>0かつγ2>0の要件を満たすものとする。図3から図5に示すグラフからも読み取れるように、第1の共振子14における3次温度係数が負の値であり、第2の共振子34における3次温度係数が正の値である場合、第1の共振子14における溝深さG1と第2の共振子16における溝深さG2との関係は、G1<G2の関係を満たすこととなる。
【0040】
図7に示すグラフは、オイラー角表示で(0°、123°、43.6°)のカット角の水晶基板12を用いたSAWデバイス10における第1の共振子14と第2の共振子16の周波数温度特性を示すものである。図7に示す例の場合、第1の共振子14におけるIDT18の電極膜厚H1は0.03λ、溝深さG1は0.010λ、ライン占有率η1は0.69である(図中実線)。一方、第2の共振子16におけるIDT28の電極膜厚H2は0.02λ、溝深さG2は0.045λ、ライン占有率η2は0.064である(図中破線)。なお、溝深さG1,G2と電極膜厚H1,H2、および波長λの関係、並びにライン占有率η1,η2を求めるために必要とされる電極指幅L1,L2並びに溝幅S1,S2の関係については、図2に示す。
【0041】
図7のように示される第1の共振子14の周波数温度特性と第2の共振子16の周波数温度特性を合成すると、周波数温度特性は、図8に示すようなものとなる。すなわち、−40℃〜+85℃までの温度帯域における周波数変動量が、わずか2.5ppm程度となる。よって、本実施形態に係るSAWデバイス10は、従来のSAWデバイスに比べ、周波数温度特性を飛躍的に向上させることができると言える。
【0042】
ところで、本実施形態に係るSAWデバイス10では、第1の共振子14の周波数温度特性と、第2の共振子16の周波数温度特性を合成することで、SAWデバイス10としての周波数温度特性を得ることとなる。このため、第1の共振子14の周波数温度特性と第2の共振子16の周波数温度特性とを示す傾き、すなわち3次温度係数が等しい場合であっても、両者の変曲点がずれた場合には周波数温度特性が悪化してしまう可能性がある。よって、2つのSAW共振子間における変曲点Tiの差分温度の許容範囲について検討する。
【0043】
図9に示すグラフは、図8(図7)の周波数温度特性を示す第1の共振子14と第2の共振子16における変曲点Tiのずれ量(変曲点の差分温度)と、変曲点Tiのずれによって生ずる周波数変動量の多寡を示すものである。図9によれば、変曲点Tiの差分温度が19℃以内であれば、SAWデバイスとしての周波数温度特性の周波数変動量は、10ppm以内とすることができることが判る。つまり、変曲点Tiの差分温度が19℃以内であれば、3次温度係数が著しく大きいような場合であっても、従来技術よりもさらに周波数温度特性を向上させるといった本願の課題を解決することができる。
【0044】
また、当然に、第1の共振子14の3次温度係数−γ1と第2の共振子16の3次温度係数γ2の絶対値が異なる場合には、3次曲線として示される周波数温度特性の合成時における打ち消しに偏りが生じ、SAWデバイス10としての周波数温度特性は悪化することとなる。よって、2つのSAW共振子間における3次温度係数γの関係についての許容範囲について検討する。
【0045】
図10は、第1の共振子14の3次温度係数−γ1と、第2の共振子16の3次温度係数γ2との比率と、周波数変動量の関係を示すグラフである。図10からはまず、γ1=γ2の場合、すなわちγ1/γ2=1の場合、周波数変動量が0ppmとなることが判る。また、図10からは、γ1/γ2>0、およびγ1/γ2≦2.4の範囲、すなわち0<|γ1|≦|2.4γ2|の範囲であれば、合成された周波数温度特性における周波数変動量が、10ppm以内となることを読み取ることができる。
【0046】
このような構成のSAWデバイス10であれば、−40℃から+85℃といった動作温度範囲内における周波数変動量を10ppm以内に抑えることができ、従来に比べて周波数温度特性を飛躍的に向上させることができる。
【0047】
なお、図1に示す形態では、単一の水晶基板12を平面視した際に、第1の共振子14と第2の共振子16との間に段差を設けることで、第1の共振子14と第2の共振子16との間における溝深さG(G1、G2)に差をつけるように示した。このような構成とした場合、段差部分にて、第1の共振子14と第2の共振子16との間を伝播する不要波を抑圧することができる。また、当該段差部分は、第1の共振子14と第2の共振子16との間における不要な音響結合を低減するといった効果も奏することとなる。
【0048】
しかしながら水晶基板12に段差を設ける構成は必須要素ではなく、本実施形態に係るSAWデバイス10は、図11に示すように、水晶基板12をフラットとした上で、電極形成部をエッチングすることで溝深さGに変化を与えるようにしても良い。なお、このような構成とした場合、2つの共振子間に生ずる段差は、引出電極38に位置させると良い。
【0049】
また、上記実施形態に係るSAWデバイス10は、単一の水晶基板12上に第1の共振子14と第2の共振子16の双方を形成する構成としていた。しかしながら、本発明に係る圧電デバイスは、第1の共振子と第2の共振子とを異なる基板により形成し、これらを電気的に接続する形態としても良い。このような構成とした場合であっても同様な効果を得ることができるからである。
【0050】
具体的には、設計上の3次温度係数が−γ1となる第1の共振子を製造する工程と、設計上の3次温度係数がγ2となる第2の共振子を製造する工程とを有する。なお、第1の共振子の製造ラインと、第2の共振子の製造ラインとは、同一ラインであっても個別ラインであっても良い。
【0051】
製造された第1の共振子群と第2の共振子群は、各々変曲点Tiと3次温度係数γが計測される。その後、変曲点Tiと3次温度係数γが計測された第1の共振子群と第2の共振子群の中から、2つの共振子における変曲点Tiの差が19℃以下であり、第1の共振子における3次温度係数−γ1と第2の共振子における3次温度係数γ2との関係が、0<|γ1|≦|2.4γ2|の関係を満たす組み合わせを選択する。ここで、選択される2つの共振子は、変曲点Tiの差が0に近似し、第1の共振子の3次温度係数−γ1と第2の共振子の3次温度係数γ2との絶対値が近似する関係となることが望ましい。
【0052】
第1の共振子と第2の共振子を選択した後、入出力電極に対し、2つの共振子が並列な関係となるように電気的に接続する。
このような方法で圧電デバイスを構成することによれば、単一基板上に2つの共振子を構成する場合に比べ、変曲点Tiの差、および3次温度係数γの関係が最適となるように組み合わせることが可能となり、歩留まりを向上させることができる。
【0053】
また、上記実施形態では、基板として、水晶基板12を採用する旨記載した。しかしながら、本発明に係る圧電デバイスは、3次温度係数を得ることのできる構成であれば、基板の構成素材を水晶とする必要は無い。例えば、SAWを励起することのできるタンタル酸リチウムや、ニオブ酸リチウム等としても良い。
【0054】
また、上記実施形態では、第1の振動子、第2の振動子共にSAW共振子として説明した。しかしながら、本発明に係る振動デバイスは、周波数温度特性が3次曲線を示す振動子であって、第1の振動子における3次温度係数−γ1と第2の振動子における3次温度係数γ2とが0<|γ1|≦|2.4γ2|の関係を満たせば、その形態を特に問うものでは無い。例えば、第1の振動子が、3次温度係数−γ1のATカット振動子であり、第2の振動子が3次温度係数γ2のSAW共振子であっても良い。
【0055】
また、本発明に係る振動デバイスは、図12に示すように、コンデンサを設けても良い。このような構成とする場合、第1の振動子14aと第2の振動子16a、およびコンデンサ70は、入力(出力)端子と出力(入力)端子に対して並列となるように接続すると良い。このような構成とすることで、コンデンサ70の容量により、第1の振動子14aと第2の振動子16aの結合度を変化させることができる。
【0056】
また、上記実施形態に係る振動デバイスは、いずれも第1の振動子(第1の共振子14)と第2の振動子(第2の共振子16)を電気的に並列となるように接続する旨説明した。しかしながら本発明に係る振動デバイスは、図13に示すように、入力(出力)端子と出力(入力)端子に対して直列接続となるように第1の振動子14aと第2の振動子16aを配置しても良い。さらにこのような接続形態を採った場合には、同図に示すように、第1の振動子14aと第2の振動子16aのそれぞれに対して並列となるようにインダクタ72を設けるようにしても良い。インダクタ72を接続することによれば、インダクタ72の値を変化させることで、第1の振動子14aと第2の振動子16aの結合度を変化させることができるからである。
【0057】
次に、本発明に係るSAW発振器について、図14を参照して説明する。本発明に係るSAW発振器は図14に示すように、上述したSAWデバイス10と、このSAWデバイス10に形成された第1の共振子14、第2の共振子16を構成するIDT18,28に電圧を印加して駆動制御するIC(integrated circuit)50と、これらを収容するパッケージ56とを備える。
【0058】
実施形態に係るSAW発振器100では、SAWデバイス10とIC50とを同一のパッケージ56に収容し、パッケージ56の底板56aに形成された電極パターン54a〜54gとSAWデバイス10に形成された入出力電極40、およびIC50のパッド52a〜52fとを金属ワイヤ60により接続している。そして、SAWデバイス10とIC50とを収容したパッケージ56のキャビティは、リッド(不図示)により気密に封止している。このような構成とすることで、IDT18,28とIC50、及びパッケージ56の底面に形成された図示しない外部実装電極とを電気的に接続することができる。
【0059】
また、本発明に係るSAW共振子は、携帯電話やハードディスク、サーバコンピュータ、および有線・無線基地におけるクロック源として用いることができ、本発明に係る電子機器は、これらの携帯電話やハードディスク等に、上述したSAW共振子を搭載したものをいう。
【0060】
上記実施形態では、振動デバイスとして特に、弾性表面波を励起する圧電デバイスを例に挙げ、従来技術に比して周波数温度特性の向上が図れる旨を説明した。しかしながら本願の思想は圧電以外の駆動方式による振動デバイスにも適用することができる。例えば、クーロン力による静電駆動による振動子や、シリコン半導体を用いたMEMS振動子等であっても、3次関数温度特性を備え、3次温度係数の符号が互いに逆となる2つの振動子であれば、本発明を適用することができる。
【符号の説明】
【0061】
10………SAWデバイス、12………水晶基板、14………第1の共振子、16………第2の共振子、18………IDT、20………電極指、22………バスバー、24………反射器、26………導体ストリップ、28………IDT、30………電極指、32………バスバー、34………反射器、36………導体ストリップ、38………引出電極、40………入出力電極。
【技術分野】
【0001】
本発明は、振動デバイス、並びにこの振動デバイスを実装した発振器、および電子機器に係り、特に周波数温度特性が良好な振動デバイス、並びに発振器、および電子機器に関する。
【背景技術】
【0002】
圧電デバイスの中において特に、弾性表面波(SAW:surface acoustic wave)デバイスでは、ストップバンドの上端モードの共振を利用することで、周波数温度特性が向上することが知られている。
【0003】
特許文献1には、特定のカット角で切り出された水晶基板上に、ストップバンドの上端モードで励振可能なIDTを形成する際、IDTの電極指間に溝を設け、この溝の深さGや、電極指のライン占有率ηを適格に定めるSAW共振子が開示されている。特許文献1に開示されている条件に従ってSAW共振子を製造することによれば、良好な周波数温度特性を得ることができ、耐環境特性、およびQ値の向上を図ることができるという。
【0004】
また、周波数温度特性の改善技術としては、2つのSAW共振子を電気的に接続することで、2つの周波数温度特性を合成する技術が知られている。例えば特許文献2に開示されている技術は、2次関数温度特性を持ち、それぞれ頂点温度が異なる2つのSAW共振子を、いわゆる横結合させることで、結合状態で得られる周波数温度特性カーブを平坦なものとするというものである。また、非特許文献1には、周波数温度特性を改善させるために、2つの1ポートSAW共振子を連続接続する構成が開示されている。具体的には、各1ポートSAW共振子に対して並列にインダクタを接続した構成や、当該インダクタを排除した構成(並列コンデンサを備える場合がある)が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2010/098139号
【特許文献2】特開平9−298446号公報
【非特許文献】
【0006】
【非特許文献1】G.Martin、H.Schmidt B.Wall「IMPROVED TEMPERATURE STABILITY OF ONE−PORT SAW RESONATORS ACHIEVED WITHOUT COILS」、2007IEEE Ultrasonics Symposium、p925−928
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記のような構成圧電デバイスによれば、確かに、従来のSAWデバイスに比べて周波数温度特性の向上を図ることができると考えられる。しかし、特許文献1に開示されているSAWデバイスは、3次温度特性を示すものの、−40℃から+85℃の範囲において、周波数変動量は±25ppm以内とするものであり、特許文献2、非特許文献1に開示されているSAWデバイスではさらに周波数変動量が大きなものとなる。
【0008】
本発明は、動作温度範囲内(例えば、−40℃から+85℃)において、従来に比べて周波数温度特性をさらに向上させることのできる振動デバイス、およびこの振動デバイスを搭載した発振器、並びに電子機器を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0010】
[適用例1]3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ1でありγ1>0である第1の振動子と、前記第1の振動子に接続され、3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ2でありγ2>0である第2の振動子とを備え、前記第1の振動子と前記第2の振動子との間における変曲点の差が19℃以下であり、0<|γ1|≦|2.4γ2|の関係を満たすことを特徴とする振動デバイス。
このような特徴を有する振動デバイスであれば、動作温度範囲内における周波数変動量を従来よりもさらに向上させることができる。
【0011】
[適用例2]適用例1に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とは互いに、オイラー角(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|49.75°)の水晶基板上に設けられ、ストップバンドの上端モードの弾性表面波を励起する弾性表面波共振子であり、前記弾性表面波を励起する励振電極を構成する電極指間に溝を備え、前記第1の振動子における前記電極指間の溝深さをG1、前記第2の振動子における前記電極指間の溝深さをG2とした場合に、G1<G2の関係を満たすことを特徴とする振動デバイス。
このような特徴を有する振動デバイスによれば、同じカット角の基板を利用してデバイスを製造することができる。
【0012】
[適用例3]適用例2に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とを単一の圧電基板上に設けたことを特徴とする振動デバイス。
このような特徴を有する振動デバイスによれば、1つの素子として周波数変動量が非常に小さいデバイスを製造することができる。
【0013】
[適用例4]適用例3に記載の振動デバイスであって、前記圧電基板上に段差を備え、前記段差は、前記圧電基板を平面視して前記第1の振動子と前記第2の振動子との間に設けることを特徴とする振動デバイス。
このような特徴を有する振動デバイスによれば、段差部分にて、第1の振動子と第2の振動子との間を伝播する不要波を抑圧することができる。また、第1の振動子と第2の振動子との間における不要な音響結合を低減することも可能となる。
【0014】
[適用例5]適用例1乃至適用例4のいずれか1例に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とが電気的に並列に接続されていることを特徴とする振動デバイス。
【0015】
[適用例6]適用例5に記載の振動デバイスであって、電気的に並列に接続された前記第1の振動子と前記第2の振動子と電気的に並列となるようにコンデンサを接続したことを特徴とする振動デバイス。
このような特徴を有することによれば、コンデンサの容量により、第1の振動子と第2の振動子との間の結合度を変化させることができる。
【0016】
[適用例7]適用例1乃至適用例4のいずれか1例に記載の振動デバイスであって、前記第1の振動子と前記第2の振動子とが電気的に直列に接続されていることを特徴とする振動デバイス。
【0017】
[適用例8]適用例7に記載の振動デバイスであって、電気的に直列に接続された前記第1の振動子と前記第2の振動子のそれぞれに対し、電気的に並列となるようにインダクタを接続したことを特徴とする振動デバイス。
このような特徴を有することによれば、インダクタの値を変化させることで、第1の振動子と第2の振動子との間の結合度を変化させることができる。
【0018】
[適用例9]適用例1乃至適用例8のいずれか1例に記載の振動デバイスと、発振回路とを有することを特徴とする発振器。
このような特徴を有する発振器によれば、上記構成に基づく効果を得ることができ、広い動作温度範囲内において、高精度な発振を実現することができ、信頼性を向上させることができる。
【0019】
[適用例10]適用例1乃至適用例8のいずれか1例に記載の振動デバイスを搭載したことを特徴とする電子機器。
このような特徴を有する電子機器によれば、広い動作温度範囲内において信頼性の高い電子機器を提供することが可能となる。
【0020】
[適用例11]3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ1でありγ1>0である第1の振動子を製造する工程と、3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ2でありγ2>0である第2の振動子を製造する工程と、製造された第1の振動子群と第2の振動子群の中から、変曲点の差が19℃以下であり、0<|γ2|≦|2.4γ1|の関係を満たす第1の振動子と第2の振動子の組み合わせを選定する工程と、選定された前記第1の振動子と前記第2の振動子とを接続する工程とを有することを特徴とする振動デバイスの製造方法。
このような特徴を有する振動デバイスの製造方法によれば、周波数温度特性が良好となる第1の振動子と第2の振動子を適宜組み合わせることができる。このため、製造後の不良が減少し、歩留まりを向上させることができる。
【図面の簡単な説明】
【0021】
【図1】実施形態に係るSAWデバイスの構成を示す斜視図である。
【図2】実施形態に係るSAWデバイスにおける第1の共振子と第2の共振子の溝深さG1,G2、電極膜厚H1,H2、電極指幅L1,L2、溝幅S1,S2、および波長λの関係を示す断面図である。
【図3】電極膜厚Hが0.02λの場合における溝深さGと3次温度係数γの関係を示すグラフである。
【図4】電極膜厚Hが0.03λの場合における溝深さGと3次温度係数γの関係を示すグラフである。
【図5】電極膜厚Hが0.04λの場合における溝深さGと3次温度係数γの関係を示すグラフである。
【図6】ライン占有率ηと変曲点Tiの関係を示すグラフである。
【図7】特定条件下における第1の共振子の周波数温度特性と第2の共振子の周波数温度特性を示すグラフである。
【図8】特定条件下における第1の共振子の周波数温度特性と第2の共振子の周波数温度特性とを結合させることで得られる周波数温度特性を示すグラフである。
【図9】2つのSAW共振子間における変曲点Tiの差分温度と周波数変動量の関係を示すグラフである。
【図10】2つのSAW共振子間における3次温度係数γの割合と周波数変動量の関係を示すグラフである。
【図11】実施形態に係るSAWデバイスの変形例を示す斜視図である。
【図12】外付け素子としてコンデンサを設ける場合の回路図である。
【図13】外付け素子としてインダクタを設ける場合の回路図である。
【図14】実施形態に係る圧電デバイスを搭載した発振器の構成を示す平面図である。
【発明を実施するための形態】
【0022】
以下、本発明の振動デバイス、発振器、および電子機器に係る実施の形態について、図面を参照しつつ詳細に説明する。なお、本実施形態では、振動デバイスの一例として、圧電デバイス、特に弾性表面波デバイス(以下、単にSAWデバイスと称す)を例に挙げて説明する。
【0023】
図1に示すように、本実施形態に係る弾性表面波デバイス(以下、単にSAWデバイス10と称す)は、水晶基板12と、この水晶基板12上に形成された2つのSAW共振子(第1の共振子(第1の振動子)14、第2の共振子(第2の振動子)16)を基本として構成される。第1の共振子14と第2の共振子16は互いにIDT18,28、反射器24,34を基本として構成され、引出電極38を介して入出力電極40に接続される。
【0024】
水晶基板12は、オイラー角表示で(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|≦49.75°)で表される面内回転STカット水晶基板を採用している。なお、オイラー角(0°、0°、0°)で表される基板は、Z軸に垂直な主面を有するZカット基板となる。ここで、オイラー角(φ、θ、ψ)のφは、Zカット基板の第1の回転に関するものであり、Z軸を回転軸とし、+X軸から+Y軸側へ回転する方向を正の回転角度とした第1回転角度である。θは、Zカット基板の第1の回転後に行う第2の回転に関するものであり、第1の回転後のX軸(=X´軸)を回転軸とし、第1の回転後の+Y軸(=+Y´軸)から+Z軸へ回転する方向を正の回転角度とした第2の回転角度である。圧電基板のカット面は、第1回転角度φと第2回転角度θとで決定される。ψは、Zカット基板の第2の回転後に行う第3の回転に関するものであり、第2の回転後のZ軸(=Z´軸)を回転軸とし、第2の回転後の+X軸(=+X´軸)から第2の回転後の+Y軸(+Y´´軸)側へ回転する方向を正の回転角度とした第3回転角度である。SAWの伝搬方向は、第2の回転後のX軸(=X´軸)に対する第3回転角度ψで表される。
【0025】
本実施形態においてIDT18とIDT28は互いに、1つの水晶基板12上に形成されている。各IDT18,28は、一対の櫛歯状電極を備える。櫛歯状電極は、複数の電極指20,30の基端部をそれぞれバスバー22,32で接続して成る。IDT18,28は、櫛歯状電極における電極指20,30同士をかみ合わせるように配置すると共に、隣接する電極指20,30間に所定の間隔が設けられるように櫛歯状電極を組み合わせることで構成される。本実施形態では、櫛歯状電極を構成する電極指20,30のバスバー22,32からの延出方向は、水晶の結晶軸であるX軸から傾きを持ったX´軸に直交するように設けられる。第1の共振子14、第2の共振子16で励起されるSAWは、Rayleigh型のSAWであり、Z´軸とX´´軸の両方に振動変位成分を有する。そしてこのようにSAWの伝播方向を水晶の結晶軸であるX軸からずらすことで、ストップバンドの上端モードのSAWを励起することが可能となる。また、本願発明者はこのように、水晶基板のカット角をオイラー角表示で(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|≦49.75°)とした上で、ストップバンドの上端モードを用いることで、SAW共振子において3次関数で示すことのできる周波数温度特性を得ることができることを確認した。
【0026】
反射器24,34は、各IDT18,28をSAWの伝播方向に挟み込むように一対ずつ設けられる。具体的構成としては、IDT18,28を構成する電極指20,30と平行に設けられる複数の導体ストリップ26,36の両端をそれぞれ接続したものである。複数の導体ストリップ26,36をそれぞれ接続する位置は必ずしも両端である必要はなく、一端のみで接続する形態や、一端と他端との間の何れかの位置で接続する形態などであっても良い。
【0027】
なお、水晶基板12のSAW伝播方向の端面からの反射波を積極的に利用する端面反射型SAW共振子や、IDTの電極指対数を多くすることでIDT自体でSAWの定在波を励起する多対IDT型SAW共振子においては、反射器は必ずしも必要では無い。
【0028】
入出力電極40は、入力ポート(または出力ポート)用と出力ポート(または入力ポート)用に、一対設けられたパターン電極である。
引出電極38は、2つのIDT18,28と一対の入出力電極40とを電気的に並列に接続するパターン電極である。本実施形態では、入出力電極40を介して印加された電圧により2つのIDT18,28にて励起される双方のSAWの位相が、一致または略一致するように、引出電極38が配される。これらのIDT18,28、反射器24,34、入出力電極40、および引出電極38等を構成するパターン電極は、アルミニウム(Al)や、Alを主体とした合金を構成材料として用いることができる。
【0029】
本実施形態に係るSAWデバイス10は、IDT18(具体的には櫛歯状電極)を構成する複数の電極指20の間、およびIDT28を構成する複数の電極指30の間に溝を設けている。溝深さGはSAWデバイスの3次温度係数γに影響を及ぼし、一般的には、3次温度係数の値(絶対値)が小さいほど、周波数温度特性が良好となることが知られている。
【0030】
図2は、図1に示した本実施形態に係るSAWデバイス10におけるIDT18を構成する電極指20と、IDT28を構成する電極指30の部分断面拡大図である。図2中λは、IDT18、およびIDT28におけるSAWの波長を示す。また、L1は電極指20の幅、L2は電極指30の幅を示し、S1は隣接する電極指20間に形成される溝の幅、S2は隣接する電極指30間に形成される溝の幅を示す。さらに、G1はIDT20における溝深さ、G2はIDT30における溝深さを示し、H1はIDT20における電極膜厚、H2はIDT30における電極膜厚を示す。なお、以下に示すライン占有率η(η1,η2)とは、電極指の幅L(L1,L2),を電極指間のピッチλ/2(=L1+S1またはL2+S2)で除して得られる値である。
【0031】
3次温度係数γと溝深さGとの関係は、オイラー角表示で第3回転角度を示すψについて、|42°〜45°|の範囲で、周波数温度特性が最も良好となる角度を適宜選択してシミュレーションを実施することで、図3から図5に示すようなグラフを得ることができる。なお、図3から図5において横軸は、弾性表面波の波長λに対する溝深さGの割合を示し、縦軸は、3次温度係数γの値を示す。また、図3は励振電極を構成する電極の膜厚(電極膜厚H)を0.02λとした場合の例を示すグラフである。また、図4は励振電極を構成する電極の膜厚(電極膜厚H)を0.03λとした場合の例を示すグラフである。また、図5は励振電極を構成する電極の膜厚(電極膜厚H)を0.04λとした場合の例を示すグラフである。
【0032】
電極膜厚Hを0.02λとした図3によれば、溝深さGが0.01λである点付近において、3次温度係数の正負が逆転していることを読み取ることができる。
【0033】
また、電極膜厚Hを0.03λとした図4によれば、溝深さGが0.015λである点付近において、3次温度係数の正負が逆転していることを読み取ることができる。
【0034】
さらに、電極膜厚Hを0.04λとした図5によれば、溝深さGが0.013λである点付近において、3次温度係数の正負が逆転していることを読み取ることができる。
【0035】
また、図3から図5に示すシミュレーションによれば、溝深さGが0.01λ〜0.05λの範囲においてはいずれも、3次温度係数γが、−0.1(10−10/℃3)〜+0.1(10−10/℃3)の範囲内であることを読み取ることができる。さらに、図3から図5によれば、3次温度係数が負の値となる場合には、3次温度係数が正の値となる場合に比べ、溝深さGが浅くなるということを読み取ることができる。
【0036】
なお、図3から図5に示すグラフを得るためのシミュレーションは、IDTにおける電極指の対数が210対、反射器の導体ストリップが97本(片側当たり)のSAW共振子をモデルとして行った。
【0037】
また、電極指の対数、導体ストリップの本数を共通とし、電極膜厚を0.02λ、溝深さGを0.05λとしたSAW共振子をモデルとして、ライン占有率ηと、変曲点Tiとの関係のシミュレーションを実施した結果、図6に示すようなグラフを得ることができた。図6によれば、ライン占有率ηの変動に応じて変曲点Tiの値が、対数関数的に変化することを読み取ることができる。さらに、変曲点Tiの変動は、ライン占有率ηが0.63未満である場合には急激な変化を示し、0.63以上では、穏やかな変化を示すことも読み取ることができる。なお、溝深さGが0.05λ以外の場合でも、ライン占有率ηにより変曲点Tiを変えることができる。
【0038】
これらの結果より、第1の共振子14と第2の共振子16との間において、IDT18,28を構成する電極指20,30間の溝深さGを異ならせることにより、3次温度係数の符号を互いに逆にし、周波数温度特性を示す3次曲線を逆転させることができる。
また、周波数温度特性を示す3次曲線から読み取ることのできる変曲点については、ライン占有率ηを調整することで制御することができる。
【0039】
よって、第1の共振子14における周波数温度特性と、第2の共振子16における周波数温度特性の3次温度係数の符号の正負を互いに逆の関係とし、これを結合させることによれば、フラットな、すなわち周波数変動量の少ない周波数温度特性を得ることができる。ここで、第1の共振子14における3次温度係数を−γ1、第2の共振子16における3次温度係数をγ2とし、γ1、γ2はそれぞれ、γ1>0かつγ2>0の要件を満たすものとする。図3から図5に示すグラフからも読み取れるように、第1の共振子14における3次温度係数が負の値であり、第2の共振子34における3次温度係数が正の値である場合、第1の共振子14における溝深さG1と第2の共振子16における溝深さG2との関係は、G1<G2の関係を満たすこととなる。
【0040】
図7に示すグラフは、オイラー角表示で(0°、123°、43.6°)のカット角の水晶基板12を用いたSAWデバイス10における第1の共振子14と第2の共振子16の周波数温度特性を示すものである。図7に示す例の場合、第1の共振子14におけるIDT18の電極膜厚H1は0.03λ、溝深さG1は0.010λ、ライン占有率η1は0.69である(図中実線)。一方、第2の共振子16におけるIDT28の電極膜厚H2は0.02λ、溝深さG2は0.045λ、ライン占有率η2は0.064である(図中破線)。なお、溝深さG1,G2と電極膜厚H1,H2、および波長λの関係、並びにライン占有率η1,η2を求めるために必要とされる電極指幅L1,L2並びに溝幅S1,S2の関係については、図2に示す。
【0041】
図7のように示される第1の共振子14の周波数温度特性と第2の共振子16の周波数温度特性を合成すると、周波数温度特性は、図8に示すようなものとなる。すなわち、−40℃〜+85℃までの温度帯域における周波数変動量が、わずか2.5ppm程度となる。よって、本実施形態に係るSAWデバイス10は、従来のSAWデバイスに比べ、周波数温度特性を飛躍的に向上させることができると言える。
【0042】
ところで、本実施形態に係るSAWデバイス10では、第1の共振子14の周波数温度特性と、第2の共振子16の周波数温度特性を合成することで、SAWデバイス10としての周波数温度特性を得ることとなる。このため、第1の共振子14の周波数温度特性と第2の共振子16の周波数温度特性とを示す傾き、すなわち3次温度係数が等しい場合であっても、両者の変曲点がずれた場合には周波数温度特性が悪化してしまう可能性がある。よって、2つのSAW共振子間における変曲点Tiの差分温度の許容範囲について検討する。
【0043】
図9に示すグラフは、図8(図7)の周波数温度特性を示す第1の共振子14と第2の共振子16における変曲点Tiのずれ量(変曲点の差分温度)と、変曲点Tiのずれによって生ずる周波数変動量の多寡を示すものである。図9によれば、変曲点Tiの差分温度が19℃以内であれば、SAWデバイスとしての周波数温度特性の周波数変動量は、10ppm以内とすることができることが判る。つまり、変曲点Tiの差分温度が19℃以内であれば、3次温度係数が著しく大きいような場合であっても、従来技術よりもさらに周波数温度特性を向上させるといった本願の課題を解決することができる。
【0044】
また、当然に、第1の共振子14の3次温度係数−γ1と第2の共振子16の3次温度係数γ2の絶対値が異なる場合には、3次曲線として示される周波数温度特性の合成時における打ち消しに偏りが生じ、SAWデバイス10としての周波数温度特性は悪化することとなる。よって、2つのSAW共振子間における3次温度係数γの関係についての許容範囲について検討する。
【0045】
図10は、第1の共振子14の3次温度係数−γ1と、第2の共振子16の3次温度係数γ2との比率と、周波数変動量の関係を示すグラフである。図10からはまず、γ1=γ2の場合、すなわちγ1/γ2=1の場合、周波数変動量が0ppmとなることが判る。また、図10からは、γ1/γ2>0、およびγ1/γ2≦2.4の範囲、すなわち0<|γ1|≦|2.4γ2|の範囲であれば、合成された周波数温度特性における周波数変動量が、10ppm以内となることを読み取ることができる。
【0046】
このような構成のSAWデバイス10であれば、−40℃から+85℃といった動作温度範囲内における周波数変動量を10ppm以内に抑えることができ、従来に比べて周波数温度特性を飛躍的に向上させることができる。
【0047】
なお、図1に示す形態では、単一の水晶基板12を平面視した際に、第1の共振子14と第2の共振子16との間に段差を設けることで、第1の共振子14と第2の共振子16との間における溝深さG(G1、G2)に差をつけるように示した。このような構成とした場合、段差部分にて、第1の共振子14と第2の共振子16との間を伝播する不要波を抑圧することができる。また、当該段差部分は、第1の共振子14と第2の共振子16との間における不要な音響結合を低減するといった効果も奏することとなる。
【0048】
しかしながら水晶基板12に段差を設ける構成は必須要素ではなく、本実施形態に係るSAWデバイス10は、図11に示すように、水晶基板12をフラットとした上で、電極形成部をエッチングすることで溝深さGに変化を与えるようにしても良い。なお、このような構成とした場合、2つの共振子間に生ずる段差は、引出電極38に位置させると良い。
【0049】
また、上記実施形態に係るSAWデバイス10は、単一の水晶基板12上に第1の共振子14と第2の共振子16の双方を形成する構成としていた。しかしながら、本発明に係る圧電デバイスは、第1の共振子と第2の共振子とを異なる基板により形成し、これらを電気的に接続する形態としても良い。このような構成とした場合であっても同様な効果を得ることができるからである。
【0050】
具体的には、設計上の3次温度係数が−γ1となる第1の共振子を製造する工程と、設計上の3次温度係数がγ2となる第2の共振子を製造する工程とを有する。なお、第1の共振子の製造ラインと、第2の共振子の製造ラインとは、同一ラインであっても個別ラインであっても良い。
【0051】
製造された第1の共振子群と第2の共振子群は、各々変曲点Tiと3次温度係数γが計測される。その後、変曲点Tiと3次温度係数γが計測された第1の共振子群と第2の共振子群の中から、2つの共振子における変曲点Tiの差が19℃以下であり、第1の共振子における3次温度係数−γ1と第2の共振子における3次温度係数γ2との関係が、0<|γ1|≦|2.4γ2|の関係を満たす組み合わせを選択する。ここで、選択される2つの共振子は、変曲点Tiの差が0に近似し、第1の共振子の3次温度係数−γ1と第2の共振子の3次温度係数γ2との絶対値が近似する関係となることが望ましい。
【0052】
第1の共振子と第2の共振子を選択した後、入出力電極に対し、2つの共振子が並列な関係となるように電気的に接続する。
このような方法で圧電デバイスを構成することによれば、単一基板上に2つの共振子を構成する場合に比べ、変曲点Tiの差、および3次温度係数γの関係が最適となるように組み合わせることが可能となり、歩留まりを向上させることができる。
【0053】
また、上記実施形態では、基板として、水晶基板12を採用する旨記載した。しかしながら、本発明に係る圧電デバイスは、3次温度係数を得ることのできる構成であれば、基板の構成素材を水晶とする必要は無い。例えば、SAWを励起することのできるタンタル酸リチウムや、ニオブ酸リチウム等としても良い。
【0054】
また、上記実施形態では、第1の振動子、第2の振動子共にSAW共振子として説明した。しかしながら、本発明に係る振動デバイスは、周波数温度特性が3次曲線を示す振動子であって、第1の振動子における3次温度係数−γ1と第2の振動子における3次温度係数γ2とが0<|γ1|≦|2.4γ2|の関係を満たせば、その形態を特に問うものでは無い。例えば、第1の振動子が、3次温度係数−γ1のATカット振動子であり、第2の振動子が3次温度係数γ2のSAW共振子であっても良い。
【0055】
また、本発明に係る振動デバイスは、図12に示すように、コンデンサを設けても良い。このような構成とする場合、第1の振動子14aと第2の振動子16a、およびコンデンサ70は、入力(出力)端子と出力(入力)端子に対して並列となるように接続すると良い。このような構成とすることで、コンデンサ70の容量により、第1の振動子14aと第2の振動子16aの結合度を変化させることができる。
【0056】
また、上記実施形態に係る振動デバイスは、いずれも第1の振動子(第1の共振子14)と第2の振動子(第2の共振子16)を電気的に並列となるように接続する旨説明した。しかしながら本発明に係る振動デバイスは、図13に示すように、入力(出力)端子と出力(入力)端子に対して直列接続となるように第1の振動子14aと第2の振動子16aを配置しても良い。さらにこのような接続形態を採った場合には、同図に示すように、第1の振動子14aと第2の振動子16aのそれぞれに対して並列となるようにインダクタ72を設けるようにしても良い。インダクタ72を接続することによれば、インダクタ72の値を変化させることで、第1の振動子14aと第2の振動子16aの結合度を変化させることができるからである。
【0057】
次に、本発明に係るSAW発振器について、図14を参照して説明する。本発明に係るSAW発振器は図14に示すように、上述したSAWデバイス10と、このSAWデバイス10に形成された第1の共振子14、第2の共振子16を構成するIDT18,28に電圧を印加して駆動制御するIC(integrated circuit)50と、これらを収容するパッケージ56とを備える。
【0058】
実施形態に係るSAW発振器100では、SAWデバイス10とIC50とを同一のパッケージ56に収容し、パッケージ56の底板56aに形成された電極パターン54a〜54gとSAWデバイス10に形成された入出力電極40、およびIC50のパッド52a〜52fとを金属ワイヤ60により接続している。そして、SAWデバイス10とIC50とを収容したパッケージ56のキャビティは、リッド(不図示)により気密に封止している。このような構成とすることで、IDT18,28とIC50、及びパッケージ56の底面に形成された図示しない外部実装電極とを電気的に接続することができる。
【0059】
また、本発明に係るSAW共振子は、携帯電話やハードディスク、サーバコンピュータ、および有線・無線基地におけるクロック源として用いることができ、本発明に係る電子機器は、これらの携帯電話やハードディスク等に、上述したSAW共振子を搭載したものをいう。
【0060】
上記実施形態では、振動デバイスとして特に、弾性表面波を励起する圧電デバイスを例に挙げ、従来技術に比して周波数温度特性の向上が図れる旨を説明した。しかしながら本願の思想は圧電以外の駆動方式による振動デバイスにも適用することができる。例えば、クーロン力による静電駆動による振動子や、シリコン半導体を用いたMEMS振動子等であっても、3次関数温度特性を備え、3次温度係数の符号が互いに逆となる2つの振動子であれば、本発明を適用することができる。
【符号の説明】
【0061】
10………SAWデバイス、12………水晶基板、14………第1の共振子、16………第2の共振子、18………IDT、20………電極指、22………バスバー、24………反射器、26………導体ストリップ、28………IDT、30………電極指、32………バスバー、34………反射器、36………導体ストリップ、38………引出電極、40………入出力電極。
【特許請求の範囲】
【請求項1】
3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ1でありγ1>0である第1の振動子と、
前記第1の振動子に接続され、3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ2でありγ2>0である第2の振動子とを備え、
前記第1の振動子と前記第2の振動子との間における変曲点の差が19℃以下であり、
0<|γ1|≦|2.4γ2|
の関係を満たすことを特徴とする振動デバイス。
【請求項2】
請求項1に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とは互いに、オイラー角(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|49.75°)の水晶基板上に設けられ、ストップバンドの上端モードの弾性表面波を励起する弾性表面波共振子であり、
前記弾性表面波を励起する励振電極を構成する電極指間に溝を備え、
前記第1の振動子における前記電極指間の溝深さをG1、前記第2の振動子における前記電極指間の溝深さをG2とした場合に、
G1<G2
の関係を満たすことを特徴とする振動デバイス。
【請求項3】
請求項2に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とを単一の圧電基板上に設けたことを特徴とする振動デバイス。
【請求項4】
請求項3に記載の振動デバイスであって、
前記圧電基板上に段差を備え、
前記段差は、前記圧電基板を平面視して前記第1の振動子と前記第2の振動子との間に設けることを特徴とする振動デバイス。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とが電気的に並列に接続されていることを特徴とする振動デバイス。
【請求項6】
請求項5に記載の振動デバイスであって、
電気的に並列に接続された前記第1の振動子と前記第2の振動子と電気的に並列となるようにコンデンサを接続したことを特徴とする振動デバイス。
【請求項7】
請求項1乃至請求項4のいずれか1項に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とが電気的に直列に接続されていることを特徴とする振動デバイス。
【請求項8】
請求項7に記載の振動デバイスであって、
電気的に直列に接続された前記第1の振動子と前記第2の振動子のそれぞれに対し、電気的に並列となるようにインダクタを接続したことを特徴とする振動デバイス。
【請求項9】
請求項1乃至請求項8のいずれか1項に記載の振動デバイスと、
発振回路とを有することを特徴とする発振器。
【請求項10】
請求項1乃至請求項8のいずれか1項に記載の振動デバイスを搭載したことを特徴とする電子機器。
【請求項11】
3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ1でありγ1>0である第1の振動子を製造する工程と、
3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ2でありγ2>0である第2の振動子を製造する工程と、
製造された第1の振動子群と第2の振動子群の中から、変曲点の差が19℃以下であり、
0<|γ2|≦|2.4γ1|
の関係を満たす第1の振動子と第2の振動子の組み合わせを選定する工程と、
選定された前記第1の振動子と前記第2の振動子とを接続する工程とを有することを特徴とする振動デバイスの製造方法。
【請求項1】
3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ1でありγ1>0である第1の振動子と、
前記第1の振動子に接続され、3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ2でありγ2>0である第2の振動子とを備え、
前記第1の振動子と前記第2の振動子との間における変曲点の差が19℃以下であり、
0<|γ1|≦|2.4γ2|
の関係を満たすことを特徴とする振動デバイス。
【請求項2】
請求項1に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とは互いに、オイラー角(−1.5°≦φ≦+1.5°,117°≦θ≦142°,42.79°≦|ψ|49.75°)の水晶基板上に設けられ、ストップバンドの上端モードの弾性表面波を励起する弾性表面波共振子であり、
前記弾性表面波を励起する励振電極を構成する電極指間に溝を備え、
前記第1の振動子における前記電極指間の溝深さをG1、前記第2の振動子における前記電極指間の溝深さをG2とした場合に、
G1<G2
の関係を満たすことを特徴とする振動デバイス。
【請求項3】
請求項2に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とを単一の圧電基板上に設けたことを特徴とする振動デバイス。
【請求項4】
請求項3に記載の振動デバイスであって、
前記圧電基板上に段差を備え、
前記段差は、前記圧電基板を平面視して前記第1の振動子と前記第2の振動子との間に設けることを特徴とする振動デバイス。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とが電気的に並列に接続されていることを特徴とする振動デバイス。
【請求項6】
請求項5に記載の振動デバイスであって、
電気的に並列に接続された前記第1の振動子と前記第2の振動子と電気的に並列となるようにコンデンサを接続したことを特徴とする振動デバイス。
【請求項7】
請求項1乃至請求項4のいずれか1項に記載の振動デバイスであって、
前記第1の振動子と前記第2の振動子とが電気的に直列に接続されていることを特徴とする振動デバイス。
【請求項8】
請求項7に記載の振動デバイスであって、
電気的に直列に接続された前記第1の振動子と前記第2の振動子のそれぞれに対し、電気的に並列となるようにインダクタを接続したことを特徴とする振動デバイス。
【請求項9】
請求項1乃至請求項8のいずれか1項に記載の振動デバイスと、
発振回路とを有することを特徴とする発振器。
【請求項10】
請求項1乃至請求項8のいずれか1項に記載の振動デバイスを搭載したことを特徴とする電子機器。
【請求項11】
3次関数温度特性を備え前記3次関数温度特性における3次温度係数がγ1でありγ1>0である第1の振動子を製造する工程と、
3次関数温度特性を備え前記3次関数温度特性における3次温度係数が−γ2でありγ2>0である第2の振動子を製造する工程と、
製造された第1の振動子群と第2の振動子群の中から、変曲点の差が19℃以下であり、
0<|γ2|≦|2.4γ1|
の関係を満たす第1の振動子と第2の振動子の組み合わせを選定する工程と、
選定された前記第1の振動子と前記第2の振動子とを接続する工程とを有することを特徴とする振動デバイスの製造方法。
【図1】



【図2】
【図3】
【図4】

【図5】

【図6】

【図7】
【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図14】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−124677(P2012−124677A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−272914(P2010−272914)
【出願日】平成22年12月7日(2010.12.7)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月7日(2010.12.7)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]