
振動制御系機械評価装置及び方法
【課題】正確に振動制御系機械の解析及び評価を行うことのできる振動制御系機械評価装置及び方法を提供する。
【解決手段】振動制御系機械の構造解析モデルを生成する解析モデル生成手段と、構造解析モデルの固有振動解析を行う構造解析手段と、固有振動解析結果を基に機構解析モデルの動的応答解析を行って機構解析モデルの制御量に対する状態量を算出する機構解析手段と、振動制御系機械の計画加速度、計画速度または計画変位のいずれかと状態量とを基に機構解析モデルの制御量を決定する制御解析手段と、過渡応力を基に寿命を評価する寿命評価手段とを備え、制御解析手段または機構解析手段は、相互の連成解析によって時系列的に得られた状態量の内、加速度または力の履歴情報を構造解析手段に出力し、構造解析手段は加速度または力の履歴情報を基に構造解析モデルの過渡応答解析を行って過渡応力を算出する。
【解決手段】振動制御系機械の構造解析モデルを生成する解析モデル生成手段と、構造解析モデルの固有振動解析を行う構造解析手段と、固有振動解析結果を基に機構解析モデルの動的応答解析を行って機構解析モデルの制御量に対する状態量を算出する機構解析手段と、振動制御系機械の計画加速度、計画速度または計画変位のいずれかと状態量とを基に機構解析モデルの制御量を決定する制御解析手段と、過渡応力を基に寿命を評価する寿命評価手段とを備え、制御解析手段または機構解析手段は、相互の連成解析によって時系列的に得られた状態量の内、加速度または力の履歴情報を構造解析手段に出力し、構造解析手段は加速度または力の履歴情報を基に構造解析モデルの過渡応答解析を行って過渡応力を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、振動制御系機械評価装置及び方法に関する。
【背景技術】
【0002】
例えば、下記特許文献1には、入力手段とシステム本体と出力手段とを備えてなる自動大型走行機器設計システムであって、システム本体が、構造系設計手段と駆動系設計手段と制御系設計手段と外乱付与手段と機構運動解析結果手段と解析結果視覚化手段と設計評価手段とを備え、構造系モデル、駆動系モデル、制御系モデルを統括して解析し、その結果を視覚化して確認した後、設計された物を評価する自動大型走行機器設計システムが開示されている。
【特許文献1】特開平10−320447号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記の従来技術では、開発・設計時に機械の変形、走行特性、制御性能、駆動力については評価を行っているが、過渡応力評価、疲労寿命評価は行われていなかった。よって、変位量が計画範囲内に収まっていれば応力・寿命共に問題ないと判断していたと考えられる。そのため、運転中の変位量等が計画範囲内に収まっていたとしても、応力集中部などで高応力が発生し、亀裂の発生・進展といった不具合が生じる可能性があった。すなわち、評価対象物における各部の正確な疲労寿命評価を行うことができず、仕様に要求される寿命が足りなかったり、過大な寿命になったりしていた。
【0004】
また、上記の従来技術では、構造系、駆動系、制御系、外乱を伝達関数として数値モデル化し、それらを機構解析モデルに取り込んで解析を実施していた。すなわち、各系を伝達関数として数値化して解析することにより数値化の際に誤差が生じてしまい、解析精度の低下を招く要因となっていた。
【0005】
本発明は、上述した事情に鑑みてなされたものであり、正確に振動制御系機械の解析及び評価を行うことのできる振動制御系機械評価装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明では、振動制御系機械評価装置に係る第1の解決手段として、評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する解析モデル生成手段と、前記構造解析モデルの固有振動解析を行う構造解析手段と、前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する機構解析手段と、前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する制御解析手段と、過渡応力を基に前記構造解析モデルの寿命評価を行う寿命評価手段とを備え、前記制御解析手段または前記機構解析手段は、相互の連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を前記構造解析手段に出力し、前記構造解析手段は、前記加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って前記過渡応力を算出することを特徴とする。
【0007】
また、本発明では、振動制御系機械評価装置に係る第2の解決手段として、上記第1の解決手段において、前記構造解析手段は、前記構造解析モデルにおいて前記過渡応力が所定の基準値を超える箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示することを特徴とする。
【0008】
また、本発明では、振動制御系機械評価装置に係る第3の解決手段として、上記第1または第2の解決手段において、前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの再生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示することを特徴とする。
【0009】
また、本発明では、振動制御系機械評価装置に係る第4の解決手段として、上記第1〜第3のいずれかの解決手段において、出力手段を備え、前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在しない場合、前記寿命評価結果を前記出力手段によって外部に出力させると共に、前記制御解析手段または前記機構解析手段に対して前記寿命が仕様を満足した場合の制御量を前記出力手段に出力するように指示することを特徴とする。
【0010】
また、本発明では、振動制御系機械評価方法に係る解決手段として、評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する第1の工程と、前記構造解析モデルの固有振動解析を行う第2の工程と、前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する第3の工程と、前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する第4の工程と、前記第3の工程と前記第4の工程との連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って過渡応力を算出する第5の工程と、前記過渡応力を基に構造解析モデルの寿命評価を行う第6の工程とを有することを特徴とする。
【発明の効果】
【0011】
本発明によれば、正確に振動制御系機械の解析及び評価を行うことのできる振動制御系機械評価装置及び方法を提供することが可能である。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して、本発明の一実施形態について説明する。
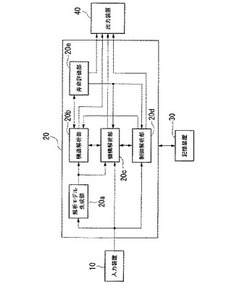
図1は、本発明の実施形態に係る振動制御系機械評価装置の機能ブロック図である。この図1に示すように、本振動制御系機械評価装置は、入力装置10、演算装置20、記憶装置30及び出力装置40から構成されている。
【0013】
入力装置10は、例えばキーボードやマウス、その他CAD(Computer Aided Design)用の各種製図データの入力装置から構成されており、各種の入力情報を演算装置20(詳細には解析モデル生成部20a、機構解析部20c及び制御解析部20d)に出力する。
【0014】
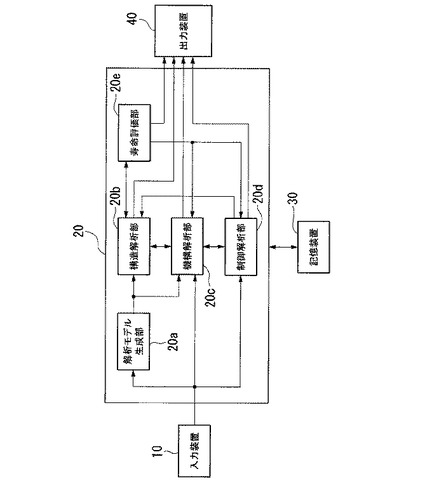
演算装置20は、入力装置10から入力される入力情報と、記憶装置30に記憶されている解析モデル生成プログラム、構造解析プログラム、機構解析プログラム、制御解析プログラム及び寿命評価プログラムとに基づいて各種演算処理を行い、当該演算処理結果を出力装置40に出力する。詳細には、この演算装置20は、解析モデル生成部(解析モデル生成手段)20a、構造解析部(構造解析手段)20b、機構解析部(機構解析手段)20c、制御解析部(制御解析手段)20d及び寿命評価部(寿命評価手段)20eを備えている。
【0015】
解析モデル生成部20aは、記憶装置30に記憶されている解析モデル生成プログラムを実行して、入力装置10からの入力情報(評価対象物である振動制御系機械の設計データ)を基に、振動制御系機械を複数の要素(3次元要素)にメッシュ分割した構造解析モデルを生成し、当該構造解析モデルのデータを構造解析部20b及び機構解析部20cに出力する。
【0016】
構造解析部20bは、記憶装置30に記憶されている構造解析プログラムを実行して、解析モデル生成部20aから入力される構造解析モデルのデータを基に、構造解析モデルの固有振動解析を行い、当該解析結果(固有振動数や固有振動モード等)を機構解析部20cに出力する。また、この構造解析部20bは、後述する制御解析部20dから入力される加速度または力の履歴情報を基に過渡応答解析を行い、当該解析結果(過渡応力)を寿命評価部20eに出力する。また、この構造解析部20bは、寿命評価部20eから寿命評価完了通知を受けた場合に、固有振動解析結果及び過渡応答解析結果を出力装置40に出力する。
【0017】
機構解析部20cは、記憶装置30に記憶されている機構解析プログラムを実行して、
入力装置10からの入力情報(設計データ)と解析モデル生成部20aから入力される構造解析モデルのデータとを基に機構解析モデルを生成し、構造解析部20bから入力される固有振動解析結果と、制御解析部20dから入力される駆動力情報(制御量)とを基に、機構解析モデルの機構解析(動的応答特性の解析)を行い、当該解析結果(変位、速度、加速度等の状態量)を制御解析部20dに出力する。また、この機構解析部20cは、寿命評価部20eから寿命評価完了通知を受けた場合、機構解析結果を出力装置40に出力する。
【0018】
制御解析部20dは、記憶装置30に記憶されている制御解析プログラムを実行して、入力装置10からの入力情報(計画加速度、計画速度または計画変位のいずれか)と、機構解析部20cから入力される機構解析結果(状態量)とを基にモータ指令値などの駆動力情報(制御量)を決定し、当該駆動力情報を機構解析部20cに出力する。また、この制御解析部20dは、機構解析部20cから得られる時系列的に得られる状態量の内、加速度または力の履歴情報を構造解析部20bに出力する。さらに、この制御解析部20dは、寿命評価部20eから寿命評価完了通知を受けた場合、最終的に得られた最適な制御量を出力装置40に出力する。寿命評価部20eは、記憶装置30に記憶されている寿命評価プログラムを実行して、構造解析部20bから入力される過渡応答解析結果を基に構造解析モデル(つまり評価対象物である振動制御系機械)の寿命を評価し、当該評価結果を出力装置40に出力する。
【0019】
なお、上記の加速度または力の履歴情報を機構解析部20cから構造解析部20bに出力するような構成としても良い。また、上記では、構造解析部20b、機構解析部20c、制御解析部20dが寿命評価部20eから寿命評価完了通知を受けた場合に、それぞれの解析結果(固有振動解析結果、過渡応答解析結果、機構解析結果、制御量)を出力装置40に出力するような構成としたが、これらの解析結果を常に出力装置40に出力させ、ユーザがこれらの解析結果の途中経過をモニタリングできるようにしても良い。
【0020】
記憶装置30は、上述した解析モデル生成プログラム、構造解析プログラム、機構解析プログラム、制御解析プログラム及び寿命評価プログラムを予め記憶すると共に、演算装置20における各種演算処理に使用されるデータの一時保存先としてのバッファ機能を有する。出力装置40は、例えば液晶ディスプレイ等の表示装置であり、構造解析部20bから入力される固有振動解析結果及び過渡応答解析結果や、機構解析部20cから入力される機構解析結果、制御解析部20dから入力される制御量、寿命評価部20eから入力される寿命評価結果などを表示する。なお、演算装置20から入力装置10の入力情報や、構造解析モデルまたは機構解析モデルの3D画像データや、各種解析の途中経過を示す情報を出力装置40に出力させ、これらを出力装置40によって表示させるような構成としても良い。
【0021】
なお、本実施形態では、評価対象物の振動制御系機械としてスタッカクレーンを想定して説明する。以下、このスタッカクレーンの構造について具体的に説明する。
【0022】
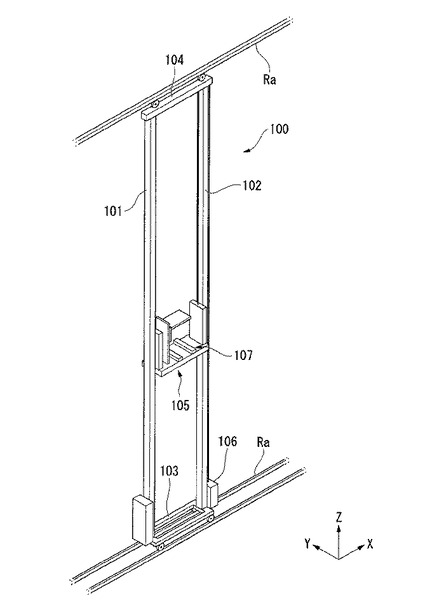
図2は、スタッカクレーン100の斜視図である。
この図に示すように、スタッカクレーン100は、X方向に離間して配置される一対のマスト101及び102と、マスト101及びマスト102を下部にて連結する下部フレーム103と、マスト101及びマスト102を上部にて連結する上部フレーム104と、マスト101及びマスト102の間に配置されると共にマスト101及び102にガイドされた上下方向(Z方向)に昇降される荷台105と、ワイヤを介して荷台105を昇降する昇降装置106と、荷台105に設置されるフォーク装置107とから概略構成されている。
【0023】
下部フレーム103及び上部フレーム104には、走行レールRaに当接される車輪が設置されている。下部フレーム103に設置される車輪が下部に敷設される走行レールRaと当接され、上部フレーム104に設置される車輪が上部に敷設される走行レールRaと当接されている。そして、これらの車輪には不図示のモータが接続されており、車輪を介してスタッカクレーン100がX方向に走行可能となっている。
【0024】
荷台105は、荷台105の端部側を構成する2つのサイドフレームと、荷台105の中心部を構成すると共に各サイドフレームに端部が固定されるメインフレームとを有している。そして、各サイドフレームに昇降装置106のワイヤが接続される。なお、各サイドフレームに接続されたワイヤは、昇降装置106によって同速で巻き取られるため、メインフレームの水平度が保たれた状態で荷台105が昇降される。
【0025】
昇降装置106は、上述した荷台105に接続されるワイヤと、該ワイヤが回巻されるドラムと、当該ドラムを回転するモータ等を備えている。そして、ドラムやモータ等が下部フレーム103上に設置されている。なお、モータは、必要に応じて変速機を介してドラムと接続される。フォーク装置107は、パレット上に載置された搬送物をパレットごと移載するためのものであり、Y方向にスライドして移動が可能な複数のアームと、これらのアームを駆動するためのモータ等を備えている。
【0026】
次に、上記のような構成の本振動制御系機械評価装置の動作について、スタッカクレーン100を評価対象物の振動制御系機械と想定して説明する。
【0027】
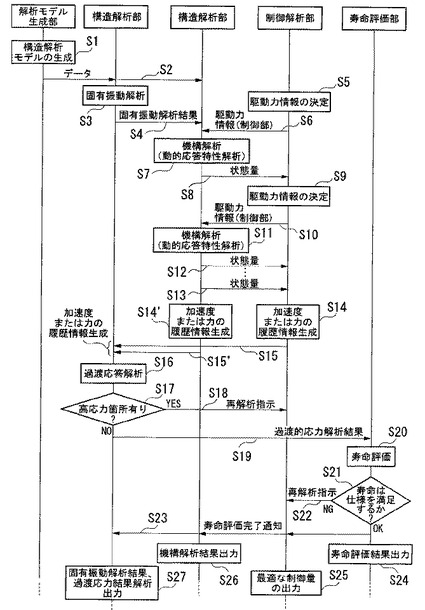
図3は、演算部20における解析モデル生成部20a、構造解析部20b、機構解析部20c、制御解析部20d及び寿命評価部20eの動作フローチャートである。
まず、解析モデル生成部20aは、入力装置10から入力されるスタッカクレーン100の設計データを基に、スタッカクレーン100の形状を規定する各線分を細分割することによりスタッカクレーン100を複数の要素(3次元要素)にメッシュ分割した構造解析モデルを生成する(ステップS1)。そして、解析モデル生成部20aは、生成した構造解析モデルのデータを構造解析部20b及び機構解析部20cに出力する(ステップS2)。ここで、構造解析モデルのデータには、スタッカクレーン100を構成する部材の板厚や質量密度、ポアソン比等の材料パラメータも含まれる。これら材料パラメータも入力装置10から入力された情報である。
【0028】
続いて、構造解析部20bは、解析モデル生成部20aから入力される構造解析モデルのデータを基に、構造解析モデルの固有振動解析を行う(ステップS3)。構造解析部20bは、この固有振動解析によって得られる第1次〜第n次の固有振動数及び各次数の固有振動数に対応するモード形状を、固有振動解析結果として機構解析部20cに出力する(ステップS4)。
【0029】
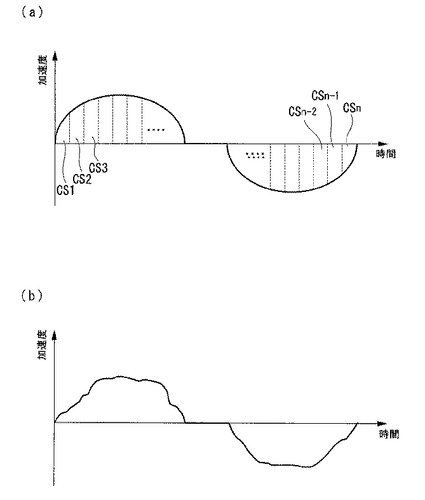
一方、制御解析部20dは、入力装置10からの入力情報(計画加速度、計画速度または計画変位のいずれか)を基に制御解析を行い、これらの計画量を達成するための、スタッカクレーン100における各駆動部分のモータの指令値(モータ指令値)を駆動力情報として決定する(ステップS5)。計画量としては、上記のように計画加速度、計画速度または計画変位のいずれかを用いれば良いが、本実施形態では計画加速度を用いた場合を例示して説明する。図4(a)は計画加速度の一例を示すグラフである。制御解析部20dは、図4(a)に示すように、この計画加速度を時間軸方向に第1制御ステップCS1〜第N制御ステップCSnまで細分化し、各制御ステップ毎の計画加速度に対応する駆動力情報を決定する。つまり、ステップS5では、第1制御ステップCS1の計画加速度に対応する駆動力情報が決定される。なお、計画加速度は、スタッカクレーン100における各駆動部分における最大加速度、最大速度、移動距離、タクトタイム等の運転計画によって決まり、ユーザが予め設定して入力装置10に入力する情報である。そして、制御解析部20dは、上記のように決定した駆動力情報を機構解析部20cに出力する(ステップS6)。
【0030】
次に、機構解析部20cは、入力装置10からの入力情報(設計データ)と解析モデル生成部20aから入力される構造解析モデルのデータとを基に機構解析モデルを生成し、構造解析部20bから入力された固有振動解析結果と、制御解析部20dから入力された駆動力情報とを基に、機構解析モデルの機構解析(動的応答特性の解析)を行う(ステップS7)。すなわち、この機構解析では、スタッカクレーン100における各駆動部分のモータにモータ指令値が入力された場合に各駆動部分に生ずる変位、速度、加速度を、実際の運転を模擬したシミュレーションによって算出する。勿論、各駆動部分に生ずる変位、速度、加速度は、固有振動解析結果、つまり固有振動数及びモード形状を考慮して解析される。そして、機構解析部20cは、上記のように求めた各駆動部分に生ずる変位、速度、加速度等の状態量を機構解析結果として制御解析部20dに出力する(ステップS8)。なお、ここで求められる状態量は、図4(a)の第1制御ステップCS1に対応するものである。
【0031】
続いて、制御解析部20dは、機構解析部20cから得られた第1制御ステップCS1に対応する状態量を基に、次の制御ステップ(つまり第2制御ステップCS2)の計画加速度に対応する駆動力情報を決定し(ステップS9)、当該第2制御ステップCS2に対応する駆動力情報を機構解析部20cに出力する(ステップS10)。そして、機構解析部20cは、ステップS7と同様に、制御解析部20dから得られる第2制御ステップCS2に対応する駆動力情報を基に、機構解析モデルの機構解析(動的応答特性の解析)を行い(ステップS11)、第2制御ステップCS2に対応する状態量を制御解析部20dに出力する(ステップS12)。
【0032】
以下、同様に、計画加速度の第N制御ステップCSnまで、制御解析(駆動力情報の決定)と機構解析(状態量の算出)との連成解析を行う。なお、本実施形態では、上記のような機構解析と制御解析との連成解析において、計画加速度に対して残留振動や振れのオーバーシュートを抑制するように駆動力情報を決定する。そして、ステップS13にて機構解析部20cから第N制御ステップCSnに対応する状態量が制御解析部20dに出力されたものとする。ここで、制御解析部20dは、機構制御部20cから得られた、第1制御ステップCS1〜第N制御ステップCSnに対応する加速度を基に、図4(b)に示すような加速度履歴情報を生成する(ステップS14)。そして、制御解析部20dは、生成した加速度履歴情報を構造解析部20bに出力する(ステップS15)。なお、機構解析部20cから出力される状態量に荷重等の力を示すパラメータが含まれている場合、この力の履歴情報を生成して構造解析部20bに出力するようにしても良い。また、加速度または力の履歴情報は、ステップS14、S15のように制御解析部20dが生成して構造解析部20bに出力するようにしても良いし、または、ステップS14’、S15’のように機構解析部20cが生成して構造解析部20bに出力するようにしても良い。
【0033】
次に、構造解析部20bは、制御解析部20dから得られた加速度履歴情報を基に構造解析モデルの過渡応答解析を行い、構造解析モデル上の各点において発生する過渡応力を求める(ステップS16)。そして、構造解析部20bは、構造解析モデル上の各点において発生する過渡応力と所定の基準値とを比較して、高応力箇所の有無を判定する(ステップS17)。このステップS17において、高応力箇所有りと判定された場合(Yes)、ステップS5〜S13間の機構−制御連成解析によって最適な制御量(駆動力情報)を得ることができなかったことを意味するため、構造解析部20bは、制御解析部20dに対して制御量の見直しと、再度ステップS5〜S13間の機構−制御連成解析を行うよう指示する(ステップS18)。
【0034】
一方、ステップS17において、高応力箇所無しと判定された場合(No)、構造解析部20bは、構造解析モデル上の各点における過渡応力の解析結果(過渡応力解析結果)を寿命評価部20eに出力する(ステップS19)。そして、寿命評価部20eは、過渡応力解析結果を基に構造解析モデル上の各点の寿命を評価する(ステップS20)。具体的には、過渡応力と寿命との関係を実験的に予め求めておき、この過渡応力と寿命との関係を示す特性データを記憶装置30に記憶し、当該特性データと構造解析モデル上の各点における過渡応力とを照合することにより、構造解析モデル上の各点における寿命を評価する。そして、寿命評価部20eは、構造解析モデル上の各点における寿命について、寿命不足または寿命過多な箇所が存在するか否かを判定する(ステップS21)。このステップS21において、寿命不足または寿命過多な箇所が存在する場合(NG)、つまり構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合、寿命評価部20eは、制御解析部20dに対して制御量の見直しと、再度ステップS5〜S13間の機構−制御連成解析を行うよう指示する(ステップS22)。
【0035】
一方、ステップS21において、寿命不足または寿命過多な箇所が存在しない場合、つまり構造解析モデル上の各点の寿命が仕様を満足する場合(OK)、寿命評価部20eは、制御解析部20d、機構解析部20c及び構造解析部20bに寿命評価が終了した旨を通知するための寿命評価完了通知を出力し(ステップS23)、寿命評価結果を出力装置40に出力する(ステップS24)。また、制御解析部20dは、寿命評価完了通知を受けると、最終的に得られた、つまり機構解析モデルに最適な制御量(駆動力情報)を出力装置40に出力する(ステップS25)。また、機構解析部20cは、寿命評価完了通知を受けると、機構解析結果(状態量)を出力装置40に出力する(ステップS26)。さらに、構造解析部20bは、寿命評価完了通知を受けると、固有振動解析結果(固有振動数やモード形状等)と過渡応答解析結果(構造解析モデル上の各点における過渡応力)を出力装置40に出力する(ステップS27)。
【0036】
以上のように本実施形態における振動制御系機械評価装置によれば、構造解析部20bにおいて、制御解析部20dによって得られる加速度または力の履歴情報を用いるため構造解析モデルに対する過渡応答解析が可能となり、構造解析モデル(つまりスタッカクレーン100)の各部に発生する過渡応力を精度良く求めることができる。その結果、精度の良い過渡応力を用いて寿命評価を行うので、正確な寿命評価を行うことができる。
【0037】
また、機構解析部20cでは、構造解析部20bで使用した構造解析モデルを基に生成した機構解析モデルを使用するので、構造解析部20bにおける固有振動解析結果をデータ変換することなく、そのまま機構解析部20cで使用することができ、また、機構解析部20cと制御解析部20dとの機構−制御連成解析結果(つまり加速度または力の履歴情報)も、データ変換することなく、そのまま構造解析部20bにおける構造解析に使用することができる。つまり、構造解析部20bと機構解析部20cと制御解析部20dとの間でデータの授受を行う際のデータ変換に起因する解析精度の低下を防止することができ、解析精度を向上することができる。また、従来のように、制御系、駆動系を伝達関数として数式化することなく、機構解析部20cと制御解析部20dとによって機構−制御連成解析することにより、伝達関数化する際に発生する誤差を防止し、より精度良く実機の挙動をシミュレーションすることが可能となる。
【0038】
さらに、構造解析モデルの過渡応力や寿命を評価することにより、剛性が小さく運転途中で揺れる量は大きいが、発生する過渡応力は小さくなるような設計も可能となり、設計の幅が広がり更なる軽量化・コストダウンの可能性を見出すことができる。
【0039】
なお、上記実施形態では、ステップS17で構造解析モデルにおいて高応力箇所有りと判定された場合や、ステップS21で構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合に、制御解析部20dに対して制御量の見直しと、再度ステップS5〜S13間の機構−制御連成解析を行うよう指示したが、これに限らず、解析モデル生成部20aに対して設計データの見直し(例えば板厚の変更など)及び新たな構造解析モデルの生成を指示し、ステップS1〜S13までの処理を再度行うようにしても良い。
【0040】
また、上記実施形態では、評価対象物の振動制御系機械としてスタッカクレーン100を想定して説明したが、本振動制御系機械評価装置は、他の振動制御系機械についての解析・評価に適用することができる。また、上記実施形態では、演算部20の機能要素として解析モデル生成部20a、構造解析部20b、機構解析部20c、制御解析部20d及び寿命評価部20eを設けた場合を例示したが、例えばCPU等の中央演算処理装置が解析モデル生成プログラム、構造解析プログラム、機構解析プログラム、制御解析プログラム及び寿命評価プログラムをタスク処理によって実行することにより、上述した図3の動作を行うような構成を採用しても良い。
【図面の簡単な説明】
【0041】
【図1】本発明の一実施形態における振動制御系機械評価装置の機能ブロック図である。
【図2】本発明の一実施形態における評価対象物の振動制御系機械であるスタッカクレーン100の構成概略図である。
【図3】本発明の一実施形態における振動制御系機械評価装置の動作フローチャートである。
【図4】本発明の一実施形態における振動制御系機械評価装置の動作に関する説明図である。
【符号の説明】
【0042】
10…入力装置、20…演算装置、30…記憶装置、40…出力装置、20a…解析モデル生成部、20b…構造解析部、20c…機構解析部、20d…制御解析部、20e…寿命評価部、100…スタッカクレーン
【技術分野】
【0001】
本発明は、振動制御系機械評価装置及び方法に関する。
【背景技術】
【0002】
例えば、下記特許文献1には、入力手段とシステム本体と出力手段とを備えてなる自動大型走行機器設計システムであって、システム本体が、構造系設計手段と駆動系設計手段と制御系設計手段と外乱付与手段と機構運動解析結果手段と解析結果視覚化手段と設計評価手段とを備え、構造系モデル、駆動系モデル、制御系モデルを統括して解析し、その結果を視覚化して確認した後、設計された物を評価する自動大型走行機器設計システムが開示されている。
【特許文献1】特開平10−320447号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記の従来技術では、開発・設計時に機械の変形、走行特性、制御性能、駆動力については評価を行っているが、過渡応力評価、疲労寿命評価は行われていなかった。よって、変位量が計画範囲内に収まっていれば応力・寿命共に問題ないと判断していたと考えられる。そのため、運転中の変位量等が計画範囲内に収まっていたとしても、応力集中部などで高応力が発生し、亀裂の発生・進展といった不具合が生じる可能性があった。すなわち、評価対象物における各部の正確な疲労寿命評価を行うことができず、仕様に要求される寿命が足りなかったり、過大な寿命になったりしていた。
【0004】
また、上記の従来技術では、構造系、駆動系、制御系、外乱を伝達関数として数値モデル化し、それらを機構解析モデルに取り込んで解析を実施していた。すなわち、各系を伝達関数として数値化して解析することにより数値化の際に誤差が生じてしまい、解析精度の低下を招く要因となっていた。
【0005】
本発明は、上述した事情に鑑みてなされたものであり、正確に振動制御系機械の解析及び評価を行うことのできる振動制御系機械評価装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明では、振動制御系機械評価装置に係る第1の解決手段として、評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する解析モデル生成手段と、前記構造解析モデルの固有振動解析を行う構造解析手段と、前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する機構解析手段と、前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する制御解析手段と、過渡応力を基に前記構造解析モデルの寿命評価を行う寿命評価手段とを備え、前記制御解析手段または前記機構解析手段は、相互の連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を前記構造解析手段に出力し、前記構造解析手段は、前記加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って前記過渡応力を算出することを特徴とする。
【0007】
また、本発明では、振動制御系機械評価装置に係る第2の解決手段として、上記第1の解決手段において、前記構造解析手段は、前記構造解析モデルにおいて前記過渡応力が所定の基準値を超える箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示することを特徴とする。
【0008】
また、本発明では、振動制御系機械評価装置に係る第3の解決手段として、上記第1または第2の解決手段において、前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの再生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示することを特徴とする。
【0009】
また、本発明では、振動制御系機械評価装置に係る第4の解決手段として、上記第1〜第3のいずれかの解決手段において、出力手段を備え、前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在しない場合、前記寿命評価結果を前記出力手段によって外部に出力させると共に、前記制御解析手段または前記機構解析手段に対して前記寿命が仕様を満足した場合の制御量を前記出力手段に出力するように指示することを特徴とする。
【0010】
また、本発明では、振動制御系機械評価方法に係る解決手段として、評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する第1の工程と、前記構造解析モデルの固有振動解析を行う第2の工程と、前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する第3の工程と、前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する第4の工程と、前記第3の工程と前記第4の工程との連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って過渡応力を算出する第5の工程と、前記過渡応力を基に構造解析モデルの寿命評価を行う第6の工程とを有することを特徴とする。
【発明の効果】
【0011】
本発明によれば、正確に振動制御系機械の解析及び評価を行うことのできる振動制御系機械評価装置及び方法を提供することが可能である。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して、本発明の一実施形態について説明する。
図1は、本発明の実施形態に係る振動制御系機械評価装置の機能ブロック図である。この図1に示すように、本振動制御系機械評価装置は、入力装置10、演算装置20、記憶装置30及び出力装置40から構成されている。
【0013】
入力装置10は、例えばキーボードやマウス、その他CAD(Computer Aided Design)用の各種製図データの入力装置から構成されており、各種の入力情報を演算装置20(詳細には解析モデル生成部20a、機構解析部20c及び制御解析部20d)に出力する。
【0014】
演算装置20は、入力装置10から入力される入力情報と、記憶装置30に記憶されている解析モデル生成プログラム、構造解析プログラム、機構解析プログラム、制御解析プログラム及び寿命評価プログラムとに基づいて各種演算処理を行い、当該演算処理結果を出力装置40に出力する。詳細には、この演算装置20は、解析モデル生成部(解析モデル生成手段)20a、構造解析部(構造解析手段)20b、機構解析部(機構解析手段)20c、制御解析部(制御解析手段)20d及び寿命評価部(寿命評価手段)20eを備えている。
【0015】
解析モデル生成部20aは、記憶装置30に記憶されている解析モデル生成プログラムを実行して、入力装置10からの入力情報(評価対象物である振動制御系機械の設計データ)を基に、振動制御系機械を複数の要素(3次元要素)にメッシュ分割した構造解析モデルを生成し、当該構造解析モデルのデータを構造解析部20b及び機構解析部20cに出力する。
【0016】
構造解析部20bは、記憶装置30に記憶されている構造解析プログラムを実行して、解析モデル生成部20aから入力される構造解析モデルのデータを基に、構造解析モデルの固有振動解析を行い、当該解析結果(固有振動数や固有振動モード等)を機構解析部20cに出力する。また、この構造解析部20bは、後述する制御解析部20dから入力される加速度または力の履歴情報を基に過渡応答解析を行い、当該解析結果(過渡応力)を寿命評価部20eに出力する。また、この構造解析部20bは、寿命評価部20eから寿命評価完了通知を受けた場合に、固有振動解析結果及び過渡応答解析結果を出力装置40に出力する。
【0017】
機構解析部20cは、記憶装置30に記憶されている機構解析プログラムを実行して、
入力装置10からの入力情報(設計データ)と解析モデル生成部20aから入力される構造解析モデルのデータとを基に機構解析モデルを生成し、構造解析部20bから入力される固有振動解析結果と、制御解析部20dから入力される駆動力情報(制御量)とを基に、機構解析モデルの機構解析(動的応答特性の解析)を行い、当該解析結果(変位、速度、加速度等の状態量)を制御解析部20dに出力する。また、この機構解析部20cは、寿命評価部20eから寿命評価完了通知を受けた場合、機構解析結果を出力装置40に出力する。
【0018】
制御解析部20dは、記憶装置30に記憶されている制御解析プログラムを実行して、入力装置10からの入力情報(計画加速度、計画速度または計画変位のいずれか)と、機構解析部20cから入力される機構解析結果(状態量)とを基にモータ指令値などの駆動力情報(制御量)を決定し、当該駆動力情報を機構解析部20cに出力する。また、この制御解析部20dは、機構解析部20cから得られる時系列的に得られる状態量の内、加速度または力の履歴情報を構造解析部20bに出力する。さらに、この制御解析部20dは、寿命評価部20eから寿命評価完了通知を受けた場合、最終的に得られた最適な制御量を出力装置40に出力する。寿命評価部20eは、記憶装置30に記憶されている寿命評価プログラムを実行して、構造解析部20bから入力される過渡応答解析結果を基に構造解析モデル(つまり評価対象物である振動制御系機械)の寿命を評価し、当該評価結果を出力装置40に出力する。
【0019】
なお、上記の加速度または力の履歴情報を機構解析部20cから構造解析部20bに出力するような構成としても良い。また、上記では、構造解析部20b、機構解析部20c、制御解析部20dが寿命評価部20eから寿命評価完了通知を受けた場合に、それぞれの解析結果(固有振動解析結果、過渡応答解析結果、機構解析結果、制御量)を出力装置40に出力するような構成としたが、これらの解析結果を常に出力装置40に出力させ、ユーザがこれらの解析結果の途中経過をモニタリングできるようにしても良い。
【0020】
記憶装置30は、上述した解析モデル生成プログラム、構造解析プログラム、機構解析プログラム、制御解析プログラム及び寿命評価プログラムを予め記憶すると共に、演算装置20における各種演算処理に使用されるデータの一時保存先としてのバッファ機能を有する。出力装置40は、例えば液晶ディスプレイ等の表示装置であり、構造解析部20bから入力される固有振動解析結果及び過渡応答解析結果や、機構解析部20cから入力される機構解析結果、制御解析部20dから入力される制御量、寿命評価部20eから入力される寿命評価結果などを表示する。なお、演算装置20から入力装置10の入力情報や、構造解析モデルまたは機構解析モデルの3D画像データや、各種解析の途中経過を示す情報を出力装置40に出力させ、これらを出力装置40によって表示させるような構成としても良い。
【0021】
なお、本実施形態では、評価対象物の振動制御系機械としてスタッカクレーンを想定して説明する。以下、このスタッカクレーンの構造について具体的に説明する。
【0022】
図2は、スタッカクレーン100の斜視図である。
この図に示すように、スタッカクレーン100は、X方向に離間して配置される一対のマスト101及び102と、マスト101及びマスト102を下部にて連結する下部フレーム103と、マスト101及びマスト102を上部にて連結する上部フレーム104と、マスト101及びマスト102の間に配置されると共にマスト101及び102にガイドされた上下方向(Z方向)に昇降される荷台105と、ワイヤを介して荷台105を昇降する昇降装置106と、荷台105に設置されるフォーク装置107とから概略構成されている。
【0023】
下部フレーム103及び上部フレーム104には、走行レールRaに当接される車輪が設置されている。下部フレーム103に設置される車輪が下部に敷設される走行レールRaと当接され、上部フレーム104に設置される車輪が上部に敷設される走行レールRaと当接されている。そして、これらの車輪には不図示のモータが接続されており、車輪を介してスタッカクレーン100がX方向に走行可能となっている。
【0024】
荷台105は、荷台105の端部側を構成する2つのサイドフレームと、荷台105の中心部を構成すると共に各サイドフレームに端部が固定されるメインフレームとを有している。そして、各サイドフレームに昇降装置106のワイヤが接続される。なお、各サイドフレームに接続されたワイヤは、昇降装置106によって同速で巻き取られるため、メインフレームの水平度が保たれた状態で荷台105が昇降される。
【0025】
昇降装置106は、上述した荷台105に接続されるワイヤと、該ワイヤが回巻されるドラムと、当該ドラムを回転するモータ等を備えている。そして、ドラムやモータ等が下部フレーム103上に設置されている。なお、モータは、必要に応じて変速機を介してドラムと接続される。フォーク装置107は、パレット上に載置された搬送物をパレットごと移載するためのものであり、Y方向にスライドして移動が可能な複数のアームと、これらのアームを駆動するためのモータ等を備えている。
【0026】
次に、上記のような構成の本振動制御系機械評価装置の動作について、スタッカクレーン100を評価対象物の振動制御系機械と想定して説明する。
【0027】
図3は、演算部20における解析モデル生成部20a、構造解析部20b、機構解析部20c、制御解析部20d及び寿命評価部20eの動作フローチャートである。
まず、解析モデル生成部20aは、入力装置10から入力されるスタッカクレーン100の設計データを基に、スタッカクレーン100の形状を規定する各線分を細分割することによりスタッカクレーン100を複数の要素(3次元要素)にメッシュ分割した構造解析モデルを生成する(ステップS1)。そして、解析モデル生成部20aは、生成した構造解析モデルのデータを構造解析部20b及び機構解析部20cに出力する(ステップS2)。ここで、構造解析モデルのデータには、スタッカクレーン100を構成する部材の板厚や質量密度、ポアソン比等の材料パラメータも含まれる。これら材料パラメータも入力装置10から入力された情報である。
【0028】
続いて、構造解析部20bは、解析モデル生成部20aから入力される構造解析モデルのデータを基に、構造解析モデルの固有振動解析を行う(ステップS3)。構造解析部20bは、この固有振動解析によって得られる第1次〜第n次の固有振動数及び各次数の固有振動数に対応するモード形状を、固有振動解析結果として機構解析部20cに出力する(ステップS4)。
【0029】
一方、制御解析部20dは、入力装置10からの入力情報(計画加速度、計画速度または計画変位のいずれか)を基に制御解析を行い、これらの計画量を達成するための、スタッカクレーン100における各駆動部分のモータの指令値(モータ指令値)を駆動力情報として決定する(ステップS5)。計画量としては、上記のように計画加速度、計画速度または計画変位のいずれかを用いれば良いが、本実施形態では計画加速度を用いた場合を例示して説明する。図4(a)は計画加速度の一例を示すグラフである。制御解析部20dは、図4(a)に示すように、この計画加速度を時間軸方向に第1制御ステップCS1〜第N制御ステップCSnまで細分化し、各制御ステップ毎の計画加速度に対応する駆動力情報を決定する。つまり、ステップS5では、第1制御ステップCS1の計画加速度に対応する駆動力情報が決定される。なお、計画加速度は、スタッカクレーン100における各駆動部分における最大加速度、最大速度、移動距離、タクトタイム等の運転計画によって決まり、ユーザが予め設定して入力装置10に入力する情報である。そして、制御解析部20dは、上記のように決定した駆動力情報を機構解析部20cに出力する(ステップS6)。
【0030】
次に、機構解析部20cは、入力装置10からの入力情報(設計データ)と解析モデル生成部20aから入力される構造解析モデルのデータとを基に機構解析モデルを生成し、構造解析部20bから入力された固有振動解析結果と、制御解析部20dから入力された駆動力情報とを基に、機構解析モデルの機構解析(動的応答特性の解析)を行う(ステップS7)。すなわち、この機構解析では、スタッカクレーン100における各駆動部分のモータにモータ指令値が入力された場合に各駆動部分に生ずる変位、速度、加速度を、実際の運転を模擬したシミュレーションによって算出する。勿論、各駆動部分に生ずる変位、速度、加速度は、固有振動解析結果、つまり固有振動数及びモード形状を考慮して解析される。そして、機構解析部20cは、上記のように求めた各駆動部分に生ずる変位、速度、加速度等の状態量を機構解析結果として制御解析部20dに出力する(ステップS8)。なお、ここで求められる状態量は、図4(a)の第1制御ステップCS1に対応するものである。
【0031】
続いて、制御解析部20dは、機構解析部20cから得られた第1制御ステップCS1に対応する状態量を基に、次の制御ステップ(つまり第2制御ステップCS2)の計画加速度に対応する駆動力情報を決定し(ステップS9)、当該第2制御ステップCS2に対応する駆動力情報を機構解析部20cに出力する(ステップS10)。そして、機構解析部20cは、ステップS7と同様に、制御解析部20dから得られる第2制御ステップCS2に対応する駆動力情報を基に、機構解析モデルの機構解析(動的応答特性の解析)を行い(ステップS11)、第2制御ステップCS2に対応する状態量を制御解析部20dに出力する(ステップS12)。
【0032】
以下、同様に、計画加速度の第N制御ステップCSnまで、制御解析(駆動力情報の決定)と機構解析(状態量の算出)との連成解析を行う。なお、本実施形態では、上記のような機構解析と制御解析との連成解析において、計画加速度に対して残留振動や振れのオーバーシュートを抑制するように駆動力情報を決定する。そして、ステップS13にて機構解析部20cから第N制御ステップCSnに対応する状態量が制御解析部20dに出力されたものとする。ここで、制御解析部20dは、機構制御部20cから得られた、第1制御ステップCS1〜第N制御ステップCSnに対応する加速度を基に、図4(b)に示すような加速度履歴情報を生成する(ステップS14)。そして、制御解析部20dは、生成した加速度履歴情報を構造解析部20bに出力する(ステップS15)。なお、機構解析部20cから出力される状態量に荷重等の力を示すパラメータが含まれている場合、この力の履歴情報を生成して構造解析部20bに出力するようにしても良い。また、加速度または力の履歴情報は、ステップS14、S15のように制御解析部20dが生成して構造解析部20bに出力するようにしても良いし、または、ステップS14’、S15’のように機構解析部20cが生成して構造解析部20bに出力するようにしても良い。
【0033】
次に、構造解析部20bは、制御解析部20dから得られた加速度履歴情報を基に構造解析モデルの過渡応答解析を行い、構造解析モデル上の各点において発生する過渡応力を求める(ステップS16)。そして、構造解析部20bは、構造解析モデル上の各点において発生する過渡応力と所定の基準値とを比較して、高応力箇所の有無を判定する(ステップS17)。このステップS17において、高応力箇所有りと判定された場合(Yes)、ステップS5〜S13間の機構−制御連成解析によって最適な制御量(駆動力情報)を得ることができなかったことを意味するため、構造解析部20bは、制御解析部20dに対して制御量の見直しと、再度ステップS5〜S13間の機構−制御連成解析を行うよう指示する(ステップS18)。
【0034】
一方、ステップS17において、高応力箇所無しと判定された場合(No)、構造解析部20bは、構造解析モデル上の各点における過渡応力の解析結果(過渡応力解析結果)を寿命評価部20eに出力する(ステップS19)。そして、寿命評価部20eは、過渡応力解析結果を基に構造解析モデル上の各点の寿命を評価する(ステップS20)。具体的には、過渡応力と寿命との関係を実験的に予め求めておき、この過渡応力と寿命との関係を示す特性データを記憶装置30に記憶し、当該特性データと構造解析モデル上の各点における過渡応力とを照合することにより、構造解析モデル上の各点における寿命を評価する。そして、寿命評価部20eは、構造解析モデル上の各点における寿命について、寿命不足または寿命過多な箇所が存在するか否かを判定する(ステップS21)。このステップS21において、寿命不足または寿命過多な箇所が存在する場合(NG)、つまり構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合、寿命評価部20eは、制御解析部20dに対して制御量の見直しと、再度ステップS5〜S13間の機構−制御連成解析を行うよう指示する(ステップS22)。
【0035】
一方、ステップS21において、寿命不足または寿命過多な箇所が存在しない場合、つまり構造解析モデル上の各点の寿命が仕様を満足する場合(OK)、寿命評価部20eは、制御解析部20d、機構解析部20c及び構造解析部20bに寿命評価が終了した旨を通知するための寿命評価完了通知を出力し(ステップS23)、寿命評価結果を出力装置40に出力する(ステップS24)。また、制御解析部20dは、寿命評価完了通知を受けると、最終的に得られた、つまり機構解析モデルに最適な制御量(駆動力情報)を出力装置40に出力する(ステップS25)。また、機構解析部20cは、寿命評価完了通知を受けると、機構解析結果(状態量)を出力装置40に出力する(ステップS26)。さらに、構造解析部20bは、寿命評価完了通知を受けると、固有振動解析結果(固有振動数やモード形状等)と過渡応答解析結果(構造解析モデル上の各点における過渡応力)を出力装置40に出力する(ステップS27)。
【0036】
以上のように本実施形態における振動制御系機械評価装置によれば、構造解析部20bにおいて、制御解析部20dによって得られる加速度または力の履歴情報を用いるため構造解析モデルに対する過渡応答解析が可能となり、構造解析モデル(つまりスタッカクレーン100)の各部に発生する過渡応力を精度良く求めることができる。その結果、精度の良い過渡応力を用いて寿命評価を行うので、正確な寿命評価を行うことができる。
【0037】
また、機構解析部20cでは、構造解析部20bで使用した構造解析モデルを基に生成した機構解析モデルを使用するので、構造解析部20bにおける固有振動解析結果をデータ変換することなく、そのまま機構解析部20cで使用することができ、また、機構解析部20cと制御解析部20dとの機構−制御連成解析結果(つまり加速度または力の履歴情報)も、データ変換することなく、そのまま構造解析部20bにおける構造解析に使用することができる。つまり、構造解析部20bと機構解析部20cと制御解析部20dとの間でデータの授受を行う際のデータ変換に起因する解析精度の低下を防止することができ、解析精度を向上することができる。また、従来のように、制御系、駆動系を伝達関数として数式化することなく、機構解析部20cと制御解析部20dとによって機構−制御連成解析することにより、伝達関数化する際に発生する誤差を防止し、より精度良く実機の挙動をシミュレーションすることが可能となる。
【0038】
さらに、構造解析モデルの過渡応力や寿命を評価することにより、剛性が小さく運転途中で揺れる量は大きいが、発生する過渡応力は小さくなるような設計も可能となり、設計の幅が広がり更なる軽量化・コストダウンの可能性を見出すことができる。
【0039】
なお、上記実施形態では、ステップS17で構造解析モデルにおいて高応力箇所有りと判定された場合や、ステップS21で構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合に、制御解析部20dに対して制御量の見直しと、再度ステップS5〜S13間の機構−制御連成解析を行うよう指示したが、これに限らず、解析モデル生成部20aに対して設計データの見直し(例えば板厚の変更など)及び新たな構造解析モデルの生成を指示し、ステップS1〜S13までの処理を再度行うようにしても良い。
【0040】
また、上記実施形態では、評価対象物の振動制御系機械としてスタッカクレーン100を想定して説明したが、本振動制御系機械評価装置は、他の振動制御系機械についての解析・評価に適用することができる。また、上記実施形態では、演算部20の機能要素として解析モデル生成部20a、構造解析部20b、機構解析部20c、制御解析部20d及び寿命評価部20eを設けた場合を例示したが、例えばCPU等の中央演算処理装置が解析モデル生成プログラム、構造解析プログラム、機構解析プログラム、制御解析プログラム及び寿命評価プログラムをタスク処理によって実行することにより、上述した図3の動作を行うような構成を採用しても良い。
【図面の簡単な説明】
【0041】
【図1】本発明の一実施形態における振動制御系機械評価装置の機能ブロック図である。
【図2】本発明の一実施形態における評価対象物の振動制御系機械であるスタッカクレーン100の構成概略図である。
【図3】本発明の一実施形態における振動制御系機械評価装置の動作フローチャートである。
【図4】本発明の一実施形態における振動制御系機械評価装置の動作に関する説明図である。
【符号の説明】
【0042】
10…入力装置、20…演算装置、30…記憶装置、40…出力装置、20a…解析モデル生成部、20b…構造解析部、20c…機構解析部、20d…制御解析部、20e…寿命評価部、100…スタッカクレーン
【特許請求の範囲】
【請求項1】
評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する解析モデル生成手段と、
前記構造解析モデルの固有振動解析を行う構造解析手段と、
前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する機構解析手段と、
前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する制御解析手段と、
過渡応力を基に前記構造解析モデルの寿命評価を行う寿命評価手段と、
を備え、
前記制御解析手段または前記機構解析手段は、相互の連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を前記構造解析手段に出力し、
前記構造解析手段は、前記加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って前記過渡応力を算出する、
ことを特徴とする振動制御系機械評価装置。
【請求項2】
前記構造解析手段は、前記構造解析モデルにおいて前記過渡応力が所定の基準値を超える箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示する、
ことを特徴とする請求項1記載の振動制御系機械評価装置。
【請求項3】
前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの再生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示する、
ことを特徴とする請求項1または2記載の振動制御系機械評価装置。
【請求項4】
出力手段を備え、
前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在しない場合、前記寿命評価結果を前記出力手段によって外部に出力させると共に、前記制御解析手段または前記機構解析手段に対して前記寿命が仕様を満足した場合の制御量を前記出力手段に出力するように指示する、
ことを特徴とする請求項1〜3のいずれか一項に記載の振動制御系機械評価装置。
【請求項5】
評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する第1の工程と、
前記構造解析モデルの固有振動解析を行う第2の工程と、
前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する第3の工程と、
前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する第4の工程と、
前記第3の工程と前記第4の工程との連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って過渡応力を算出する第5の工程と、
前記過渡応力を基に構造解析モデルの寿命評価を行う第6の工程と、
を有することを特徴とする振動制御系機械評価方法。
【請求項1】
評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する解析モデル生成手段と、
前記構造解析モデルの固有振動解析を行う構造解析手段と、
前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する機構解析手段と、
前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する制御解析手段と、
過渡応力を基に前記構造解析モデルの寿命評価を行う寿命評価手段と、
を備え、
前記制御解析手段または前記機構解析手段は、相互の連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を前記構造解析手段に出力し、
前記構造解析手段は、前記加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って前記過渡応力を算出する、
ことを特徴とする振動制御系機械評価装置。
【請求項2】
前記構造解析手段は、前記構造解析モデルにおいて前記過渡応力が所定の基準値を超える箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示する、
ことを特徴とする請求項1記載の振動制御系機械評価装置。
【請求項3】
前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在する場合、前記解析モデル生成手段に対して設計データの見直し及び新たな構造解析モデルの再生成を指示するか、または、前記制御解析手段に対して制御量の見直し及び前記機構解析手段との再連成解析を指示する、
ことを特徴とする請求項1または2記載の振動制御系機械評価装置。
【請求項4】
出力手段を備え、
前記寿命評価手段は、前記寿命評価の結果、前記構造解析モデルにおいて寿命が要求される仕様を満足しない箇所が存在しない場合、前記寿命評価結果を前記出力手段によって外部に出力させると共に、前記制御解析手段または前記機構解析手段に対して前記寿命が仕様を満足した場合の制御量を前記出力手段に出力するように指示する、
ことを特徴とする請求項1〜3のいずれか一項に記載の振動制御系機械評価装置。
【請求項5】
評価対象物である振動制御系機械の設計データを基に、前記振動制御系機械を複数の要素にメッシュ分割した構造解析モデルを生成する第1の工程と、
前記構造解析モデルの固有振動解析を行う第2の工程と、
前記設計データと前記構造解析モデルとを基に機構解析モデルを生成し、前記固有振動解析結果を基に前記機構解析モデルの動的応答解析を行うことにより、前記機構解析モデルの制御量に対する状態量を算出する第3の工程と、
前記振動制御系機械の計画加速度、計画速度または計画変位のいずれかと前記機構解析手段から得られる前記状態量とを基に前記機構解析モデルの制御量を決定する第4の工程と、
前記第3の工程と前記第4の工程との連成解析によって時系列的に得られた前記状態量の内、加速度または力の履歴情報を基に前記構造解析モデルの過渡応答解析を行って過渡応力を算出する第5の工程と、
前記過渡応力を基に構造解析モデルの寿命評価を行う第6の工程と、
を有することを特徴とする振動制御系機械評価方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−269455(P2008−269455A)
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願番号】特願2007−114043(P2007−114043)
【出願日】平成19年4月24日(2007.4.24)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願日】平成19年4月24日(2007.4.24)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]