
振動制御装置及び振動制御方法
【課題】 最適な変位中心位置及び中立釣り合い位置に精度良く設定され、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置及び振動制御方法を提供する。
【解決手段】 加速度検知手段41の検知した値を加算する計算部55と、計算部55の結果に応じて、調整手段34の負荷を設定する負荷設定部51と、負荷設定部51の設定した負荷に応じて調整手段34に駆動信号を与える調整手段制御部52と、振動制御手段21の変位中心を記憶する記憶部54と、を有する制御手段50を備え、制御手段50は、調整手段34の負荷を調整することで、振動制御手段21を記憶部54の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定することを特徴とする。
【解決手段】 加速度検知手段41の検知した値を加算する計算部55と、計算部55の結果に応じて、調整手段34の負荷を設定する負荷設定部51と、負荷設定部51の設定した負荷に応じて調整手段34に駆動信号を与える調整手段制御部52と、振動制御手段21の変位中心を記憶する記憶部54と、を有する制御手段50を備え、制御手段50は、調整手段34の負荷を調整することで、振動制御手段21を記憶部54の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、座席等の搭乗部、特に移動体等に設置される座席等の搭乗部に加わる振動を抑制、又は低減する振動制御装置及び振動制御方法に関する。
【背景技術】
【0002】
従来、上部フレームを下部フレームに対して弾性的に支持する補助バネ部材を有し、上部フレームおよび下部フレームにそれぞれ正の弾性力または負の弾性力を有する磁石を配設することで、補助バネによる弾性力との力の釣合い位置を調整可能にしたシートサスペンションが開示されている(特許文献1参照)。
【0003】
また、振動吸収機構の負荷質量に応じた中立位置をより確実に保持することができるシートサスペンションが開示されている(特許文献2参照)。
【特許文献1】特開2003−320884号公報
【特許文献2】特開2005−199939号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1及び2に記載された発明では、力の釣合いを、磁石を用いて調整しているので、磁石を別途配設する必要があり、コストが増加する。
【0005】
また、磁石で釣合いのずれを調整したとしても、部材間に存在するフリクションのために、フリクションの大きさの範囲内で釣合いのずれが生じてしまう。そのため、磁石で中立位置を調整した後に、静止状態においてフリクションよりも小さな力のずれが生じているときには、その小さな力によりシートの力の釣り合いが取れた静止位置から動くことはないが、少なくともフリクションよりも大きな力である振動を加えた後にはその静止位置にずれが生じる。
【0006】
したがって、シート位置が力の釣り合いの取れた最適な静止位置に設定されないので、キャビンからの振動をうまく制御することが出来なくなる。
【0007】
本発明は、上記課題を解決するものであって、最適な変位中心位置及び中立釣り合い位置に精度良く設定され、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置及び振動制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
そのために本発明は、設置部に設置され、前記設置部に対して相対移動する荷重支持部と、前記荷重支持部と連結され荷重と釣り合う負荷を与え、前記荷重支持部に対して相対移動するカウンタバランス部と、前記荷重支持部の前記設置部に対する振動を制御する振動制御手段を有する振動制御部と、前記荷重支持部の加速度を検知する加速度検知手段と、前記カウンタバランス部の負荷を調整する調整手段と、を備えた振動制御装置において、前記加速度検知手段の検知した値を加算する計算部と、前記計算部の結果に応じて、前記調整手段の負荷を設定する負荷設定部と、前記負荷設定部の設定した負荷に応じて前記調整手段に駆動信号を与える調整手段制御部と、前記振動制御手段の変位中心を記憶する記憶部と、を有する制御手段を備え、前記制御手段は、前記調整手段の負荷を調整することで、前記振動制御手段を前記記憶部の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定することを特徴とする。
【0009】
また、前記振動制御手段に駆動信号を与える振動制御手段制御部と、を備え、前記振動制御手段制御部が前記振動制御手段を駆動させて生じた前記荷重支持部の振動の加速度を前記加速度検知手段が検知することを特徴とする。
【0010】
また、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算し、加算した加速度に応じて、前記負荷を制御することを特徴とする。
【0011】
また、前記負荷設定部は、前記加算結果が0より大きい場合、前記負荷を減少させるよう設定し、前記加算結果が0より小さい場合、前記負荷を増加させるよう設定することを特徴とする。
【0012】
また、前記加速度検知手段が前記荷重支持部の加速度を取得する前に、振動制御手段制御部が振動制御手段を加振することを特徴とする。
【0013】
また、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算する際、上下ピーク値を加算することを特徴とする。
【0014】
さらに、本発明は、設置部に設置された荷重支持部に連結されたカウンタバランス部により荷重と釣り合う負荷を与える振動制御方法において、前記荷重支持部の加速度を取得するステップと、前記加速度を加算するステップと、加算した加速度に応じて、前記負荷を制御するステップと、を有することを特徴とする。
【0015】
また、前記負荷を制御するステップは、前記加算結果が0より大きい場合、前記負荷を減少させるステップと、前記加算結果が0より小さい場合、前記負荷を増加させるステップからなることを特徴とする。
【0016】
また、前記荷重支持部の加速度を取得するステップの前に、振動制御手段を加振するステップを有することを特徴とする。
【0017】
また、前記加速度を加算するステップは、上下ピーク値を加算することを特徴とする。
【発明の効果】
【0018】
請求項1記載の発明によれば、設置部に設置され、前記設置部に対して相対移動する荷重支持部と、前記荷重支持部と連結され荷重と釣り合う負荷を与え、前記荷重支持部に対して相対移動するカウンタバランス部と、前記荷重支持部の前記設置部に対する振動を制御する振動制御手段を有する振動制御部と、前記荷重支持部の加速度を検知する加速度検知手段と、前記カウンタバランス部の負荷を調整する調整手段と、を備えた振動制御装置において、前記加速度検知手段の検知した値を加算する計算部と、前記計算部の結果に応じて、前記調整手段の負荷を設定する負荷設定部と、前記負荷設定部の設定した負荷に応じて前記調整手段に駆動信号を与える調整手段制御部と、前記振動制御手段の変位中心を記憶する記憶部と、を有する制御手段を備え、前記制御手段は、前記調整手段の負荷を調整することで、前記振動制御手段を前記記憶部の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置を提供することができる。
【0019】
請求項2記載の発明によれば、前記振動制御手段に駆動信号を与える振動制御手段制御部と、を備え、前記振動制御手段制御部が前記振動制御手段を駆動させて生じた前記荷重支持部の振動の加速度を前記加速度検知手段が検知するので、さらに、精度良く釣り合い位置を設定することができる。
【0020】
請求項3記載の発明によれば、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算し、加算した加速度に応じて、前記負荷を制御するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置を提供することができる。
【0021】
請求項4記載の発明によれば、前記負荷設定部は、前記加算結果が0より大きい場合、前記負荷を減少させるよう設定し、前記加算結果が0より小さい場合、前記負荷を増加させるよう設定するので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる。
【0022】
請求項5記載の発明によれば、前記加速度検知手段が前記荷重支持部の加速度を取得する前に、振動制御手段制御部が振動制御手段を加振するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる。
【0023】
請求項6記載の発明によれば、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算する際、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる。
【0024】
請求項7記載の発明によれば、設置部に設置された荷重支持部に連結されたカウンタバランス部により荷重と釣り合う負荷を与える振動制御方法において、前記荷重支持部の加速度を取得するステップと、前記加速度を加算するステップと、加算した加速度に応じて、前記負荷を制御するステップと、を有するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置を提供することができる。
【0025】
請求項8記載の発明によれば、前記負荷を制御するステップは、前記加算結果が0より大きい場合、前記負荷を減少させるステップと、前記加算結果が0より小さい場合、前記負荷を増加させるステップからなるので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる。
【0026】
請求項9記載の発明によれば、前記荷重支持部の加速度を取得するステップの前に、振動制御手段を加振するステップを有するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる。
【0027】
請求項10記載の発明によれば、前記加速度を加算するステップは、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる。
【発明を実施するための最良の形態】
【0028】
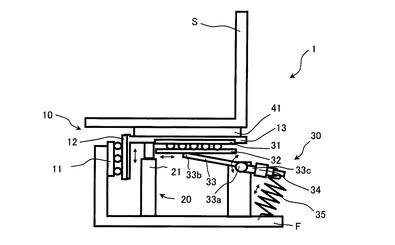
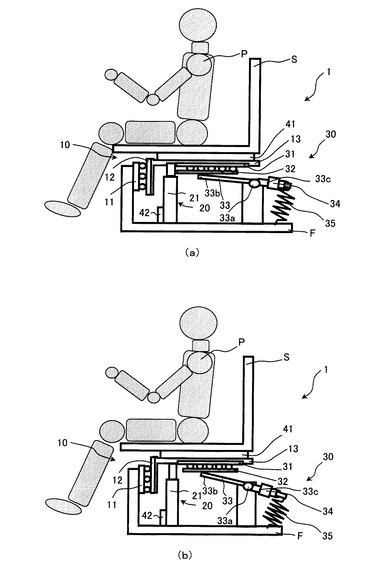
以下、本発明の好ましい実施の形態について図面を参照して説明する。 図1は、第1実施形態における振動制御装置1を示す。図中、1は振動制御装置、10は荷重支持部、11は第1案内手段の一例としての第1スライダレール、12は第1移動手段の一例としての第1スライダ、13は荷重支持部材、20は振動制御部、21は振動制御手段の一例としての制振用アクチュエータ、30はカウンタバランス部、31は第2案内手段の一例としての第2スライダレール、32は第2移動手段の一例としての第2スライダ、33は第2移動手段支持部の一例としての第2スライダ支持部、34は調整手段の一例としてのプリロード調整用アクチュエータ、35はねじりバネ、40は入力手段、41は加速度検知手段の一例としての加速度センサ、42は変位検知手段の一例としての変位センサ、50は制御部、Fは設置部、Sは座席である。
【0029】
本発明では、付勢手段として弾性部材であるスプリング35を用い、スプリング35による弾性力を付勢手段の付勢力として用いているが、この実施例に制限されるものではない。本発明においては、第1案内手段としての第1スライダレール11と第1移動手段としての第1スライダ12をまとめて第1移動案内手段とする。同様に、第2案内手段としての第2スライダレール31と第2移動手段としての第2スライダ32もまとめて第2移動案内手段とする。
【0030】
振動制御装置1は、荷重支持部10により床等の設置部Fに設置され、振動制御部20で振動制御装置1上の座席S等の荷重の振動をアクティブに制御すると共に、カウンタバランス部30で荷重に対する力の釣り合いを設定するものである。
【0031】
荷重支持部10は、設置部Fに設置された第1スライダレール11、荷重支持部材13に設けた第1スライダ12及び座席Sを支持する荷重支持部材13等を有する。第1スライダレール11は、設置部Fに設置され、第1スライダ12及び荷重支持部材13を上下方向に案内する。第1スライダ12は、荷重支持部材13に設けられ、第1スライダレール11により上下方向に案内される。荷重支持部材13は、座席Sの下方に設置され、第1スライダレール11により上下方向に案内される第1スライダ12を有し、振動制御部20及びカウンタバランス部30に載置されている。
【0032】
振動制御部20は、ボイスコイルモータ等の制振用アクチュエータ21等を有する。制振用アクチュエータ21は、下部を設置部Fに設置、上部を荷重支持部材13に当接され、加速度センサ41や変位センサ42等からの信号により、上下動可能に制御される。
【0033】
カウンタバランス部30は、第2スライダレール31、第2スライダ32、天秤部33、プリロード調整用アクチュエータ34、スプリング35等を有する。第2スライダレール31は、荷重支持部材13に設置され、第2スライダ32を移動可能に案内する。第2スライダ32は、天秤部33の一端に連結されると共に、第2スライダレール31に案内され、荷重支持部材13に対して移動可能なものである。
【0034】
天秤部33は、設置部Fに支点33aを有し、一端側33bを第2スライダ32に、他端側33cをプリロード調整用アクチュエータ34を介してスプリング35に回動可能に連結する。
【0035】
プリロード調整用アクチュエータ34は、長さを可変することができるもので、一端を天秤部33に連結され、他端をスプリング35に固着されている。スプリング35は、一端をプリロード調整用アクチュエータ34に固着され、他端を設置部Fに固着されている。
【0036】
入力手段40は、加重支持部10の加速度を検知する加速度センサ41及び加重支持部10の変位を検知する変位センサ42等を有する。
【0037】
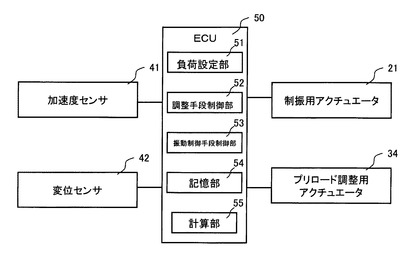
図2は、このような構造の振動制御装置1のブロック図を示す。加速度センサ41及び変位センサ42からの入力信号を制御手段としてのECU50に入力し、制振用アクチュエータ21及びプリロード調整用アクチュエータ34を制御することで、荷重にあわせてアクティブに振動を制御する。
【0038】
また、制御手段の一例としてのECU50は、加速度センサ41及び変位センサ42で検知した状態に応じて、プリロード調整用アクチュエータ34の負荷を設定する負荷設定部51と、負荷設定部51の設定した負荷に応じてプリロード調整用アクチュエータ34に駆動信号を与える調整手段制御部の一例としてのプリロード調整用アクチュエータ制御部52と、制振用アクチュエータ21に駆動信号を与える振動制御手段制御部の一例として御制振用アクチュエータ制御部53と、制振用アクチュエータ21の変位中心位置を記憶する記憶部54と、加速度センサ41の検知した値を加算する計算部55と、を有する。そして、負荷設定部51や計算部55の結果に応じて、プリロード調整用アクチュエータ34の負荷を調整することで、制振用アクチュエータ21を可動範囲の変位中心位置に配置させると共に、荷重支持部10とカウンタバランス部を中立釣り合い状態とするものである。
【0039】
次に、プリロード位置調整方法について説明する。図3はアバウト設定制御のフローチャートを示す。
【0040】
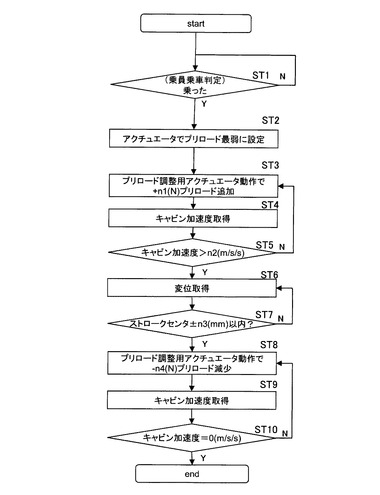
図3に示すアバウト設定制御のフローチャートでは、まず、ステップ1で、乗員の乗車判定を実行する(ST1)。この判定は、加速度センサ22や変位センサ23等で行い、着座センサやボタンにより判断してもよい。
【0041】
ステップ1において、乗員が乗車していない場合、再び、ステップ1に戻る。
【0042】
ステップ1において、乗員が乗車している場合、ステップ2で、図4(a)に示すように、プリロード調整用アクチュエータ34の出力を最も弱く設定する(ST2)。
【0043】
続いて、ステップ3で、図4(b)に示すように、プリロード調整用アクチュエータ34の出力を所定の増加量である一定値n1ごとに増加させる(ST3)。本実施形態では、例えば、所定の増加量である一定値約5Nずつ増加させる。次に、ステップ4で、座席Sの加速度を加速度センサ41から取得する(ST4)。続いて、ステップ5で、ステップ4において取得した座席Sを有するキャビン加速度が所定値n2より大きいか判断する(ST5)。本実施形態では、所定値n2を0.2m/s2とする。
【0044】
ステップ5において、キャビン加速度が所定値n2より小さい場合、ステップ3に戻る。
【0045】
ステップ5において、キャビン加速度が所定値n2より大きい場合、ステップ6で、変位センサ42により座席Sの変位を取得する(ST6)。続いてステップ7で、座席Sが変位中心位置としてのストロークセンタの±n3以内にあるか判断する(ST7)。本実施形態では、n3を約2mmに設定している。座席Sのストロークセンタはあらかじめ計測又は計算し、記憶しておけばよい。
【0046】
次に、ステップ8で、プリロード調整用アクチュエータ34の出力を所定の減少量である一定値n4ごとに減少させる(ST8)。本実施形態では、例えば、所定の減少量である一定値約1Nずつ減少させる。本実施形態では、所定の減少量である一定値は、振動制御装置の設計仕様や、プリロード調整用アクチュエータ34の設計仕様に基づいて決められている。また、所定の減少量である一定値n4は、所定の増加量である一定値n1より小さく設定されている。そのため、プリロード調整用アクチュエータ34の出力を所定の増加量である一定値n4によって、力の釣り合いが部材間に存在するフリクションを含めた上で調整でき、フリクションの大きさの範囲内で釣合いのずれを無くすように調整することができるので精度良く釣り合い位置を設定できる。
【0047】
次に、ステップ9で、座席Sの加速度を加速度センサ41から取得する(ST9)。続いて、ステップ10で、ステップ9において取得したキャビン加速度が0か判断する(ST10)。
【0048】
ステップ10において、キャビン加速度が0でない場合、ステップ8に戻る。
【0049】
ステップ10において、キャビン加速度が0の場合、アバウト設定制御を終了する。
【0050】
ところで、ステップ3とステップ8の順にプリロード調整用アクチュエータ34を調整しているのは、ステップ3とステップ8のステップの順番を入れ換えるとプリロード調整用アクチュエータ34の出力の調整が困難となり、迅速に調整することができない。本振動制御装置1は、ステップ3からステップ10の順にプリロード調整用アクチュエータ34の出力を制御することで、付勢手段としてスプリング35の付勢力を調整して荷重支持部10とカウンタバランス部30との釣り合い位置を調整している。そして、ステップ3とステップ4を入れ換えた場合には、プリロード調整用アクチュエータ34の出力を予め大きくしておき、所定の減少量である一定値でプリロード調整用アクチュエータ34の出力を減少させ、所定の増加量である一定値でプリロード調整用アクチュエータ34の出力を増加させることになる。この場合、所定の減少量である一定値でプリロード調整用アクチュエータ34の出力が減少された状態で荷重支持部10とカウンタバランス部30が釣り合った状態になり、この状態から所定の増加量である一定値でプリロード調整用アクチュエータ34の出力を増加させると、付勢手段としてのスプリング35の弾性力の性質とフリクションにより、荷重支持部10とカウンタバランス部30の釣り合いをとる付勢力が急激に増加することになる。そのため、付勢力の増加と減少を繰り返し調整する必要が出てくるので、プリロード調整用アクチュエータ34の制御が困難となり、迅速に調整することができなくなる。また、プリロード調整用アクチュエータ34を事細かに制御可能なアクチュエータにする必要が出てくるのでコストも増加する。
【0051】
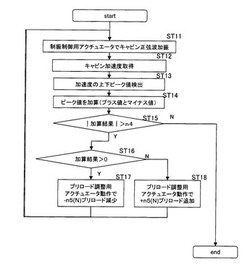
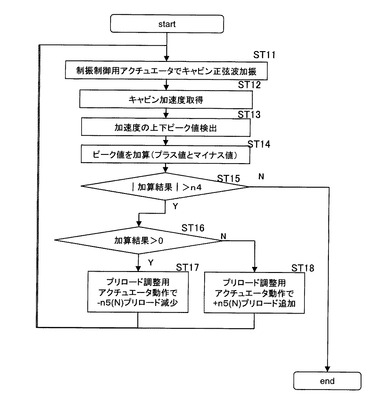
次に、微調整制御の第1実施形態を説明する。図5に示す微調整制御のフローチャートでは、まず、ステップ11で、制振制御用アクチュエータ21により座席Sを正弦波で加振する(ST11)。続いて、ステップ12で、座席Sのキャビン加速度を加速度センサ22から取得する(ST12)。次に、ステップ13で、ステップ12において取得した座席Sのキャビン加速度から上下ピーク値を検知する(ST13)。続いて、ステップ14で、ステップ13において検知した上下ピーク値を加算する(ST14)。この時、上ピーク値は正の値、下ピーク値は負の値である。
【0052】
次に、ステップ15で、ステップ14において求めた加算値の絶対値が所定値n5より大きいか判断する(ST15)。本実施形態では、所定値n5を3m/s2とした。
【0053】
ステップ15において、加算値の絶対値が所定値n5より大きいと判断した場合、ステップ16で、加算値が0より大きいか判断する(ST16)。
【0054】
ステップ16において、加算値が0より大きいと判断した場合、ステップ17で、プリロード調整用アクチュエータ34の出力を一定値n6減少させ、ステップ11に戻る(ST17)。
【0055】
ステップ16において、加算値が0以下と判断した場合、ステップ18で、プリロード調整用アクチュエータ34の出力を一定値n6増加させ、ステップ11に戻る(ST18)。
【0056】
ステップ15において、加算値の絶対値が所定値n5より小さいと判断した場合、微調整制御を終了する。
【0057】
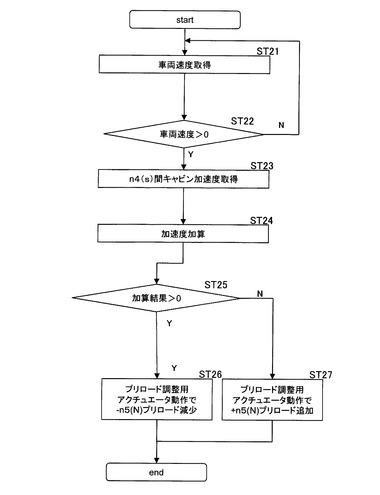
次に、微調整制御の第2実施形態を説明する。図6に示す微調整制御のフローチャートでは、まず、ステップ21で、例えば、速度検知手段等により車両速度を検知する(ST21)。続いて、ステップ22で車両速度が0より大きく、車両が走行中であるか判断する(ST22)。
【0058】
ステップ22において、車両が走行中でない場合、ステップ21に戻る。
【0059】
ステップ22において、車両が走行中の場合、ステップ23で、座席Sの加速度を加速度センサ22から所定の時間取得する(ST23)。次に、ステップ24で、ステップ23において取得した座席Sの加速度を加算する(ST24)。続いて、ステップ25で、ステップ24において加算した加速度の加算値が0より大きいか判断する(ST25)。
【0060】
ステップ25において、加速度の加算値が所定値0より大きいと判断した場合、ステップ26で、プリロード調整用アクチュエータ34の出力を一定値n6減少させ、終了する(ST26)。
【0061】
ステップ25において、加算値が0以下と判断した場合、ステップ27で、プリロード調整用アクチュエータ34の出力を一定値n6増加させ、終了する(ST27)。
【0062】
この第2実施形態の微調整制御は、振動制御と共に、走行中連続して実行されるものである。
【0063】
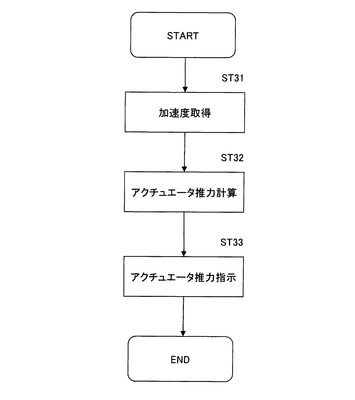
次に、本実施形態の振動制御について説明する。図7は、振動制御のフローチャートを示す。まず、ステップ31で、振動時の加速度を加速度センサ23により検出する(ST31)。次に、ステップ32で、ECU40において制振用アクチュエータ21の推力を計算する(ST32)。推力計算は、例えば、加速度×フリクション×ゲイン×(−1)等の計算式やあらかじめ加速度に対応する推力の値を記憶しておくことにより実行する。ここで、計算式におけるゲインは制御の遅れ分、−1は向きの反転を表す。続いて、ステップ33で、ステップ32において計算した推力を制振用アクチュエータ21に指示する(ST33)。
【0064】
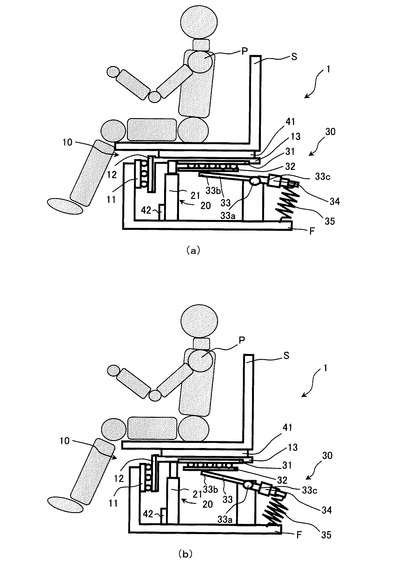
図8は、振動制御の状態を示すもので、図8(a)は制振用アクチュエータ21を収縮した状態、図8(b)は制振用アクチュエータ21を伸張した状態を示すものである。
【0065】
図8(a)は、ステップ32に対応する加速度から求めた推力指示が制振用アクチュエータ21の収縮の場合であり、座席S上の振動を0にするため制振用アクチュエータ21を収縮すると、スライダ32が前方に移動すると共に、カウンタバランス部30の天秤部33が反時計方向に回転する。この時、スプリング35は伸張するが、その傾斜角度が変更されるため、スプリング35の伸張による反力の鉛直成分はほぼキャンセルされ、荷重とスプリング35による負荷は、ほぼ釣り合い状態を保持することができる。
【0066】
図8(b)は、ステップ32に対応する加速度から求めた推力指示が制振用アクチュエータ21の収縮の場合であり、座席S上の振動を0にするため制振用アクチュエータ21を伸張すると、スライダ32が後方に移動すると共に、カウンタバランス部30の天秤部33が時計方向に回転する。この時、スプリング35は収縮するが、その傾斜角度が変更されるため、スプリング35の収縮による反力の鉛直成分はほぼキャンセルされ、荷重とスプリング35による負荷は、ほぼ釣り合い状態を保持することができる。
【0067】
したがって、荷重とスプリング35による負荷は、常にほぼ釣り合い状態を保持することができるので、制振用アクチュエータ21の出力を小さくすることができる。
【0068】
このように、設置部Fに設置され、設置部Fに対して相対移動する荷重支持部10と、荷重支持部10と連結され荷重と釣り合う負荷を与え、荷重支持部10に対して相対移動するカウンタバランス部30と、荷重支持部10の設置部Fに対する振動を制御する制振用アクチュエータ21を有する振動制御部20と、荷重支持部10の加速度を検知する加速度センサ41と、カウンタバランス部30の負荷を調整するプリロード調整用アクチュエータ34と、を備えた振動制御装置1において、加速度センサ41の検知した値を加算する計算部55と、計算部55の結果に応じて、プリロード調整用アクチュエータ34の負荷を設定する負荷設定部51と、負荷設定部51の設定した負荷に応じてプリロード調整用アクチュエータ34に駆動信号を与えるプリロード調整用アクチュエータ制御部52と、制振用アクチュエータ21の変位中心を記憶する記憶部54と、を有する制御手段50を備え、制御手段50は、プリロード調整用アクチュエータ34の負荷を調整することで、制振用アクチュエータ21を記憶部54の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、制振用アクチュエータ21の出力を低減することができ、小型の制振用アクチュエータ21で実現できる効率的な振動制御装置1を提供することができる。
【0069】
また、制振用アクチュエータ21に駆動信号を与える制振用アクチュエータ制御部53と、を備え、制振用アクチュエータ制御部53が制振用アクチュエータ21を駆動させて生じた荷重支持部10の振動の加速度を加速度センサ41が検知するので、さらに、精度良く釣り合い位置を設定することができる。
【0070】
また、負荷設定部51は、加速度センサ41が取得した荷重支持部10の加速度を計算部55で加算し、加算した加速度に応じて、負荷を制御するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、制振用アクチュエータ21の出力を低減することができ、小型の制振用アクチュエータ21で実現できる効率的な振動制御装置1を提供することができる。
【0071】
また、負荷設定部51は、加算結果が0より大きい場合、負荷を減少させるよう設定し、加算結果が0より小さい場合、負荷を増加させるよう設定するので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる。
【0072】
また、加速度センサ41が荷重支持部10の加速度を取得する前に、制振用アクチュエータ制御部53が制振用アクチュエータ21を加振するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる。
【0073】
また、負荷設定部51は、加速度センサ41が取得した荷重支持部10の加速度を計算部55で加算する際、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる。
【0074】
また、設置部Fに設置された荷重支持部10に連結されたカウンタバランス部30により荷重と釣り合う負荷を与える振動制御方法において、荷重支持部10の加速度を取得するステップST12と、加速度を加算するステップST14と、加算した加速度に応じて、負荷を制御するステップST17,ST18と、を有するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、制振用アクチュエータ21の出力を低減することができ、小型の制振用アクチュエータ21で実現できる効率的な振動制御装置1を提供することができる。
【0075】
また、負荷を制御するステップST17,ST18は、加算結果が0より大きい場合、負荷を減少させるステップST17と、加算結果が0より小さい場合、負荷を増加させるステップST18からなるので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる
また、荷重支持部10の加速度を取得するステップST2の前に、制振用アクチュエータ21を加振するステップST1を有するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる
また、加速度を加算するステップST4は、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる
【図面の簡単な説明】
【0076】
【図1】第1実施形態の振動制御装置を示す図である。
【図2】振動制御装置のシステム構成を示したブロック図である。
【図3】プリロード調整制御のアバウト設定制御フローチャートを示す図である。
【図4】プリロード調整制御の第1実施形態の微調整制御フローチャートを示す図である。
【図5】プリロード調整制御の第2実施形態の微調整制御フローチャートを示す図である。
【図6】プリロード調整制御時の振動制御装置の状態を示す図である。
【図7】振動制御のフローチャートを示す図である。
【図8】振動制御時の振動制御装置の状態を示す図である。
【符号の説明】
【0077】
1…振動制御装置、10…荷重支持部、11…第1スライダレール(第1案内手段)、12…第1スライダ(第1移動手段)、13…荷重支持部材、20…振動制御部、21…制振用アクチュエータ(振動制御手段)、30…カウンタバランス部、31…第2スライダレール(第2案内手段)、32…第2スライダ(第2移動手段)、33…天秤部、34…プリロード調整用アクチュエータ(調整手段)、35…スプリング(付勢手段)、40…入力手段、41…加速度センサ(加速度検知手段)、42…変位センサ(変位検知手段)、50…ECU(制御手段)、51…負荷設定部、52…プリロード調整用アクチュエータ制御部(調整手段制御部)、53…制振用アクチュエータ制御部(振動制御手段制御部)、54…記憶部
【技術分野】
【0001】
本発明は、座席等の搭乗部、特に移動体等に設置される座席等の搭乗部に加わる振動を抑制、又は低減する振動制御装置及び振動制御方法に関する。
【背景技術】
【0002】
従来、上部フレームを下部フレームに対して弾性的に支持する補助バネ部材を有し、上部フレームおよび下部フレームにそれぞれ正の弾性力または負の弾性力を有する磁石を配設することで、補助バネによる弾性力との力の釣合い位置を調整可能にしたシートサスペンションが開示されている(特許文献1参照)。
【0003】
また、振動吸収機構の負荷質量に応じた中立位置をより確実に保持することができるシートサスペンションが開示されている(特許文献2参照)。
【特許文献1】特開2003−320884号公報
【特許文献2】特開2005−199939号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1及び2に記載された発明では、力の釣合いを、磁石を用いて調整しているので、磁石を別途配設する必要があり、コストが増加する。
【0005】
また、磁石で釣合いのずれを調整したとしても、部材間に存在するフリクションのために、フリクションの大きさの範囲内で釣合いのずれが生じてしまう。そのため、磁石で中立位置を調整した後に、静止状態においてフリクションよりも小さな力のずれが生じているときには、その小さな力によりシートの力の釣り合いが取れた静止位置から動くことはないが、少なくともフリクションよりも大きな力である振動を加えた後にはその静止位置にずれが生じる。
【0006】
したがって、シート位置が力の釣り合いの取れた最適な静止位置に設定されないので、キャビンからの振動をうまく制御することが出来なくなる。
【0007】
本発明は、上記課題を解決するものであって、最適な変位中心位置及び中立釣り合い位置に精度良く設定され、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置及び振動制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
そのために本発明は、設置部に設置され、前記設置部に対して相対移動する荷重支持部と、前記荷重支持部と連結され荷重と釣り合う負荷を与え、前記荷重支持部に対して相対移動するカウンタバランス部と、前記荷重支持部の前記設置部に対する振動を制御する振動制御手段を有する振動制御部と、前記荷重支持部の加速度を検知する加速度検知手段と、前記カウンタバランス部の負荷を調整する調整手段と、を備えた振動制御装置において、前記加速度検知手段の検知した値を加算する計算部と、前記計算部の結果に応じて、前記調整手段の負荷を設定する負荷設定部と、前記負荷設定部の設定した負荷に応じて前記調整手段に駆動信号を与える調整手段制御部と、前記振動制御手段の変位中心を記憶する記憶部と、を有する制御手段を備え、前記制御手段は、前記調整手段の負荷を調整することで、前記振動制御手段を前記記憶部の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定することを特徴とする。
【0009】
また、前記振動制御手段に駆動信号を与える振動制御手段制御部と、を備え、前記振動制御手段制御部が前記振動制御手段を駆動させて生じた前記荷重支持部の振動の加速度を前記加速度検知手段が検知することを特徴とする。
【0010】
また、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算し、加算した加速度に応じて、前記負荷を制御することを特徴とする。
【0011】
また、前記負荷設定部は、前記加算結果が0より大きい場合、前記負荷を減少させるよう設定し、前記加算結果が0より小さい場合、前記負荷を増加させるよう設定することを特徴とする。
【0012】
また、前記加速度検知手段が前記荷重支持部の加速度を取得する前に、振動制御手段制御部が振動制御手段を加振することを特徴とする。
【0013】
また、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算する際、上下ピーク値を加算することを特徴とする。
【0014】
さらに、本発明は、設置部に設置された荷重支持部に連結されたカウンタバランス部により荷重と釣り合う負荷を与える振動制御方法において、前記荷重支持部の加速度を取得するステップと、前記加速度を加算するステップと、加算した加速度に応じて、前記負荷を制御するステップと、を有することを特徴とする。
【0015】
また、前記負荷を制御するステップは、前記加算結果が0より大きい場合、前記負荷を減少させるステップと、前記加算結果が0より小さい場合、前記負荷を増加させるステップからなることを特徴とする。
【0016】
また、前記荷重支持部の加速度を取得するステップの前に、振動制御手段を加振するステップを有することを特徴とする。
【0017】
また、前記加速度を加算するステップは、上下ピーク値を加算することを特徴とする。
【発明の効果】
【0018】
請求項1記載の発明によれば、設置部に設置され、前記設置部に対して相対移動する荷重支持部と、前記荷重支持部と連結され荷重と釣り合う負荷を与え、前記荷重支持部に対して相対移動するカウンタバランス部と、前記荷重支持部の前記設置部に対する振動を制御する振動制御手段を有する振動制御部と、前記荷重支持部の加速度を検知する加速度検知手段と、前記カウンタバランス部の負荷を調整する調整手段と、を備えた振動制御装置において、前記加速度検知手段の検知した値を加算する計算部と、前記計算部の結果に応じて、前記調整手段の負荷を設定する負荷設定部と、前記負荷設定部の設定した負荷に応じて前記調整手段に駆動信号を与える調整手段制御部と、前記振動制御手段の変位中心を記憶する記憶部と、を有する制御手段を備え、前記制御手段は、前記調整手段の負荷を調整することで、前記振動制御手段を前記記憶部の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置を提供することができる。
【0019】
請求項2記載の発明によれば、前記振動制御手段に駆動信号を与える振動制御手段制御部と、を備え、前記振動制御手段制御部が前記振動制御手段を駆動させて生じた前記荷重支持部の振動の加速度を前記加速度検知手段が検知するので、さらに、精度良く釣り合い位置を設定することができる。
【0020】
請求項3記載の発明によれば、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算し、加算した加速度に応じて、前記負荷を制御するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置を提供することができる。
【0021】
請求項4記載の発明によれば、前記負荷設定部は、前記加算結果が0より大きい場合、前記負荷を減少させるよう設定し、前記加算結果が0より小さい場合、前記負荷を増加させるよう設定するので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる。
【0022】
請求項5記載の発明によれば、前記加速度検知手段が前記荷重支持部の加速度を取得する前に、振動制御手段制御部が振動制御手段を加振するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる。
【0023】
請求項6記載の発明によれば、前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算する際、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる。
【0024】
請求項7記載の発明によれば、設置部に設置された荷重支持部に連結されたカウンタバランス部により荷重と釣り合う負荷を与える振動制御方法において、前記荷重支持部の加速度を取得するステップと、前記加速度を加算するステップと、加算した加速度に応じて、前記負荷を制御するステップと、を有するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、振動制御手段の出力を低減することができ、小型の振動制御手段で実現できる効率的な振動制御装置を提供することができる。
【0025】
請求項8記載の発明によれば、前記負荷を制御するステップは、前記加算結果が0より大きい場合、前記負荷を減少させるステップと、前記加算結果が0より小さい場合、前記負荷を増加させるステップからなるので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる。
【0026】
請求項9記載の発明によれば、前記荷重支持部の加速度を取得するステップの前に、振動制御手段を加振するステップを有するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる。
【0027】
請求項10記載の発明によれば、前記加速度を加算するステップは、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる。
【発明を実施するための最良の形態】
【0028】
以下、本発明の好ましい実施の形態について図面を参照して説明する。 図1は、第1実施形態における振動制御装置1を示す。図中、1は振動制御装置、10は荷重支持部、11は第1案内手段の一例としての第1スライダレール、12は第1移動手段の一例としての第1スライダ、13は荷重支持部材、20は振動制御部、21は振動制御手段の一例としての制振用アクチュエータ、30はカウンタバランス部、31は第2案内手段の一例としての第2スライダレール、32は第2移動手段の一例としての第2スライダ、33は第2移動手段支持部の一例としての第2スライダ支持部、34は調整手段の一例としてのプリロード調整用アクチュエータ、35はねじりバネ、40は入力手段、41は加速度検知手段の一例としての加速度センサ、42は変位検知手段の一例としての変位センサ、50は制御部、Fは設置部、Sは座席である。
【0029】
本発明では、付勢手段として弾性部材であるスプリング35を用い、スプリング35による弾性力を付勢手段の付勢力として用いているが、この実施例に制限されるものではない。本発明においては、第1案内手段としての第1スライダレール11と第1移動手段としての第1スライダ12をまとめて第1移動案内手段とする。同様に、第2案内手段としての第2スライダレール31と第2移動手段としての第2スライダ32もまとめて第2移動案内手段とする。
【0030】
振動制御装置1は、荷重支持部10により床等の設置部Fに設置され、振動制御部20で振動制御装置1上の座席S等の荷重の振動をアクティブに制御すると共に、カウンタバランス部30で荷重に対する力の釣り合いを設定するものである。
【0031】
荷重支持部10は、設置部Fに設置された第1スライダレール11、荷重支持部材13に設けた第1スライダ12及び座席Sを支持する荷重支持部材13等を有する。第1スライダレール11は、設置部Fに設置され、第1スライダ12及び荷重支持部材13を上下方向に案内する。第1スライダ12は、荷重支持部材13に設けられ、第1スライダレール11により上下方向に案内される。荷重支持部材13は、座席Sの下方に設置され、第1スライダレール11により上下方向に案内される第1スライダ12を有し、振動制御部20及びカウンタバランス部30に載置されている。
【0032】
振動制御部20は、ボイスコイルモータ等の制振用アクチュエータ21等を有する。制振用アクチュエータ21は、下部を設置部Fに設置、上部を荷重支持部材13に当接され、加速度センサ41や変位センサ42等からの信号により、上下動可能に制御される。
【0033】
カウンタバランス部30は、第2スライダレール31、第2スライダ32、天秤部33、プリロード調整用アクチュエータ34、スプリング35等を有する。第2スライダレール31は、荷重支持部材13に設置され、第2スライダ32を移動可能に案内する。第2スライダ32は、天秤部33の一端に連結されると共に、第2スライダレール31に案内され、荷重支持部材13に対して移動可能なものである。
【0034】
天秤部33は、設置部Fに支点33aを有し、一端側33bを第2スライダ32に、他端側33cをプリロード調整用アクチュエータ34を介してスプリング35に回動可能に連結する。
【0035】
プリロード調整用アクチュエータ34は、長さを可変することができるもので、一端を天秤部33に連結され、他端をスプリング35に固着されている。スプリング35は、一端をプリロード調整用アクチュエータ34に固着され、他端を設置部Fに固着されている。
【0036】
入力手段40は、加重支持部10の加速度を検知する加速度センサ41及び加重支持部10の変位を検知する変位センサ42等を有する。
【0037】
図2は、このような構造の振動制御装置1のブロック図を示す。加速度センサ41及び変位センサ42からの入力信号を制御手段としてのECU50に入力し、制振用アクチュエータ21及びプリロード調整用アクチュエータ34を制御することで、荷重にあわせてアクティブに振動を制御する。
【0038】
また、制御手段の一例としてのECU50は、加速度センサ41及び変位センサ42で検知した状態に応じて、プリロード調整用アクチュエータ34の負荷を設定する負荷設定部51と、負荷設定部51の設定した負荷に応じてプリロード調整用アクチュエータ34に駆動信号を与える調整手段制御部の一例としてのプリロード調整用アクチュエータ制御部52と、制振用アクチュエータ21に駆動信号を与える振動制御手段制御部の一例として御制振用アクチュエータ制御部53と、制振用アクチュエータ21の変位中心位置を記憶する記憶部54と、加速度センサ41の検知した値を加算する計算部55と、を有する。そして、負荷設定部51や計算部55の結果に応じて、プリロード調整用アクチュエータ34の負荷を調整することで、制振用アクチュエータ21を可動範囲の変位中心位置に配置させると共に、荷重支持部10とカウンタバランス部を中立釣り合い状態とするものである。
【0039】
次に、プリロード位置調整方法について説明する。図3はアバウト設定制御のフローチャートを示す。
【0040】
図3に示すアバウト設定制御のフローチャートでは、まず、ステップ1で、乗員の乗車判定を実行する(ST1)。この判定は、加速度センサ22や変位センサ23等で行い、着座センサやボタンにより判断してもよい。
【0041】
ステップ1において、乗員が乗車していない場合、再び、ステップ1に戻る。
【0042】
ステップ1において、乗員が乗車している場合、ステップ2で、図4(a)に示すように、プリロード調整用アクチュエータ34の出力を最も弱く設定する(ST2)。
【0043】
続いて、ステップ3で、図4(b)に示すように、プリロード調整用アクチュエータ34の出力を所定の増加量である一定値n1ごとに増加させる(ST3)。本実施形態では、例えば、所定の増加量である一定値約5Nずつ増加させる。次に、ステップ4で、座席Sの加速度を加速度センサ41から取得する(ST4)。続いて、ステップ5で、ステップ4において取得した座席Sを有するキャビン加速度が所定値n2より大きいか判断する(ST5)。本実施形態では、所定値n2を0.2m/s2とする。
【0044】
ステップ5において、キャビン加速度が所定値n2より小さい場合、ステップ3に戻る。
【0045】
ステップ5において、キャビン加速度が所定値n2より大きい場合、ステップ6で、変位センサ42により座席Sの変位を取得する(ST6)。続いてステップ7で、座席Sが変位中心位置としてのストロークセンタの±n3以内にあるか判断する(ST7)。本実施形態では、n3を約2mmに設定している。座席Sのストロークセンタはあらかじめ計測又は計算し、記憶しておけばよい。
【0046】
次に、ステップ8で、プリロード調整用アクチュエータ34の出力を所定の減少量である一定値n4ごとに減少させる(ST8)。本実施形態では、例えば、所定の減少量である一定値約1Nずつ減少させる。本実施形態では、所定の減少量である一定値は、振動制御装置の設計仕様や、プリロード調整用アクチュエータ34の設計仕様に基づいて決められている。また、所定の減少量である一定値n4は、所定の増加量である一定値n1より小さく設定されている。そのため、プリロード調整用アクチュエータ34の出力を所定の増加量である一定値n4によって、力の釣り合いが部材間に存在するフリクションを含めた上で調整でき、フリクションの大きさの範囲内で釣合いのずれを無くすように調整することができるので精度良く釣り合い位置を設定できる。
【0047】
次に、ステップ9で、座席Sの加速度を加速度センサ41から取得する(ST9)。続いて、ステップ10で、ステップ9において取得したキャビン加速度が0か判断する(ST10)。
【0048】
ステップ10において、キャビン加速度が0でない場合、ステップ8に戻る。
【0049】
ステップ10において、キャビン加速度が0の場合、アバウト設定制御を終了する。
【0050】
ところで、ステップ3とステップ8の順にプリロード調整用アクチュエータ34を調整しているのは、ステップ3とステップ8のステップの順番を入れ換えるとプリロード調整用アクチュエータ34の出力の調整が困難となり、迅速に調整することができない。本振動制御装置1は、ステップ3からステップ10の順にプリロード調整用アクチュエータ34の出力を制御することで、付勢手段としてスプリング35の付勢力を調整して荷重支持部10とカウンタバランス部30との釣り合い位置を調整している。そして、ステップ3とステップ4を入れ換えた場合には、プリロード調整用アクチュエータ34の出力を予め大きくしておき、所定の減少量である一定値でプリロード調整用アクチュエータ34の出力を減少させ、所定の増加量である一定値でプリロード調整用アクチュエータ34の出力を増加させることになる。この場合、所定の減少量である一定値でプリロード調整用アクチュエータ34の出力が減少された状態で荷重支持部10とカウンタバランス部30が釣り合った状態になり、この状態から所定の増加量である一定値でプリロード調整用アクチュエータ34の出力を増加させると、付勢手段としてのスプリング35の弾性力の性質とフリクションにより、荷重支持部10とカウンタバランス部30の釣り合いをとる付勢力が急激に増加することになる。そのため、付勢力の増加と減少を繰り返し調整する必要が出てくるので、プリロード調整用アクチュエータ34の制御が困難となり、迅速に調整することができなくなる。また、プリロード調整用アクチュエータ34を事細かに制御可能なアクチュエータにする必要が出てくるのでコストも増加する。
【0051】
次に、微調整制御の第1実施形態を説明する。図5に示す微調整制御のフローチャートでは、まず、ステップ11で、制振制御用アクチュエータ21により座席Sを正弦波で加振する(ST11)。続いて、ステップ12で、座席Sのキャビン加速度を加速度センサ22から取得する(ST12)。次に、ステップ13で、ステップ12において取得した座席Sのキャビン加速度から上下ピーク値を検知する(ST13)。続いて、ステップ14で、ステップ13において検知した上下ピーク値を加算する(ST14)。この時、上ピーク値は正の値、下ピーク値は負の値である。
【0052】
次に、ステップ15で、ステップ14において求めた加算値の絶対値が所定値n5より大きいか判断する(ST15)。本実施形態では、所定値n5を3m/s2とした。
【0053】
ステップ15において、加算値の絶対値が所定値n5より大きいと判断した場合、ステップ16で、加算値が0より大きいか判断する(ST16)。
【0054】
ステップ16において、加算値が0より大きいと判断した場合、ステップ17で、プリロード調整用アクチュエータ34の出力を一定値n6減少させ、ステップ11に戻る(ST17)。
【0055】
ステップ16において、加算値が0以下と判断した場合、ステップ18で、プリロード調整用アクチュエータ34の出力を一定値n6増加させ、ステップ11に戻る(ST18)。
【0056】
ステップ15において、加算値の絶対値が所定値n5より小さいと判断した場合、微調整制御を終了する。
【0057】
次に、微調整制御の第2実施形態を説明する。図6に示す微調整制御のフローチャートでは、まず、ステップ21で、例えば、速度検知手段等により車両速度を検知する(ST21)。続いて、ステップ22で車両速度が0より大きく、車両が走行中であるか判断する(ST22)。
【0058】
ステップ22において、車両が走行中でない場合、ステップ21に戻る。
【0059】
ステップ22において、車両が走行中の場合、ステップ23で、座席Sの加速度を加速度センサ22から所定の時間取得する(ST23)。次に、ステップ24で、ステップ23において取得した座席Sの加速度を加算する(ST24)。続いて、ステップ25で、ステップ24において加算した加速度の加算値が0より大きいか判断する(ST25)。
【0060】
ステップ25において、加速度の加算値が所定値0より大きいと判断した場合、ステップ26で、プリロード調整用アクチュエータ34の出力を一定値n6減少させ、終了する(ST26)。
【0061】
ステップ25において、加算値が0以下と判断した場合、ステップ27で、プリロード調整用アクチュエータ34の出力を一定値n6増加させ、終了する(ST27)。
【0062】
この第2実施形態の微調整制御は、振動制御と共に、走行中連続して実行されるものである。
【0063】
次に、本実施形態の振動制御について説明する。図7は、振動制御のフローチャートを示す。まず、ステップ31で、振動時の加速度を加速度センサ23により検出する(ST31)。次に、ステップ32で、ECU40において制振用アクチュエータ21の推力を計算する(ST32)。推力計算は、例えば、加速度×フリクション×ゲイン×(−1)等の計算式やあらかじめ加速度に対応する推力の値を記憶しておくことにより実行する。ここで、計算式におけるゲインは制御の遅れ分、−1は向きの反転を表す。続いて、ステップ33で、ステップ32において計算した推力を制振用アクチュエータ21に指示する(ST33)。
【0064】
図8は、振動制御の状態を示すもので、図8(a)は制振用アクチュエータ21を収縮した状態、図8(b)は制振用アクチュエータ21を伸張した状態を示すものである。
【0065】
図8(a)は、ステップ32に対応する加速度から求めた推力指示が制振用アクチュエータ21の収縮の場合であり、座席S上の振動を0にするため制振用アクチュエータ21を収縮すると、スライダ32が前方に移動すると共に、カウンタバランス部30の天秤部33が反時計方向に回転する。この時、スプリング35は伸張するが、その傾斜角度が変更されるため、スプリング35の伸張による反力の鉛直成分はほぼキャンセルされ、荷重とスプリング35による負荷は、ほぼ釣り合い状態を保持することができる。
【0066】
図8(b)は、ステップ32に対応する加速度から求めた推力指示が制振用アクチュエータ21の収縮の場合であり、座席S上の振動を0にするため制振用アクチュエータ21を伸張すると、スライダ32が後方に移動すると共に、カウンタバランス部30の天秤部33が時計方向に回転する。この時、スプリング35は収縮するが、その傾斜角度が変更されるため、スプリング35の収縮による反力の鉛直成分はほぼキャンセルされ、荷重とスプリング35による負荷は、ほぼ釣り合い状態を保持することができる。
【0067】
したがって、荷重とスプリング35による負荷は、常にほぼ釣り合い状態を保持することができるので、制振用アクチュエータ21の出力を小さくすることができる。
【0068】
このように、設置部Fに設置され、設置部Fに対して相対移動する荷重支持部10と、荷重支持部10と連結され荷重と釣り合う負荷を与え、荷重支持部10に対して相対移動するカウンタバランス部30と、荷重支持部10の設置部Fに対する振動を制御する制振用アクチュエータ21を有する振動制御部20と、荷重支持部10の加速度を検知する加速度センサ41と、カウンタバランス部30の負荷を調整するプリロード調整用アクチュエータ34と、を備えた振動制御装置1において、加速度センサ41の検知した値を加算する計算部55と、計算部55の結果に応じて、プリロード調整用アクチュエータ34の負荷を設定する負荷設定部51と、負荷設定部51の設定した負荷に応じてプリロード調整用アクチュエータ34に駆動信号を与えるプリロード調整用アクチュエータ制御部52と、制振用アクチュエータ21の変位中心を記憶する記憶部54と、を有する制御手段50を備え、制御手段50は、プリロード調整用アクチュエータ34の負荷を調整することで、制振用アクチュエータ21を記憶部54の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、制振用アクチュエータ21の出力を低減することができ、小型の制振用アクチュエータ21で実現できる効率的な振動制御装置1を提供することができる。
【0069】
また、制振用アクチュエータ21に駆動信号を与える制振用アクチュエータ制御部53と、を備え、制振用アクチュエータ制御部53が制振用アクチュエータ21を駆動させて生じた荷重支持部10の振動の加速度を加速度センサ41が検知するので、さらに、精度良く釣り合い位置を設定することができる。
【0070】
また、負荷設定部51は、加速度センサ41が取得した荷重支持部10の加速度を計算部55で加算し、加算した加速度に応じて、負荷を制御するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、制振用アクチュエータ21の出力を低減することができ、小型の制振用アクチュエータ21で実現できる効率的な振動制御装置1を提供することができる。
【0071】
また、負荷設定部51は、加算結果が0より大きい場合、負荷を減少させるよう設定し、加算結果が0より小さい場合、負荷を増加させるよう設定するので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる。
【0072】
また、加速度センサ41が荷重支持部10の加速度を取得する前に、制振用アクチュエータ制御部53が制振用アクチュエータ21を加振するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる。
【0073】
また、負荷設定部51は、加速度センサ41が取得した荷重支持部10の加速度を計算部55で加算する際、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる。
【0074】
また、設置部Fに設置された荷重支持部10に連結されたカウンタバランス部30により荷重と釣り合う負荷を与える振動制御方法において、荷重支持部10の加速度を取得するステップST12と、加速度を加算するステップST14と、加算した加速度に応じて、負荷を制御するステップST17,ST18と、を有するので、荷重センサや磁石等を別途配設する必要が無く、コストを安くすることができると共に、部材間のフリクションを含めた力の釣り合いを設定することができ、迅速に精度良く釣り合い位置を設定することができると共に、制振用アクチュエータ21の出力を低減することができ、小型の制振用アクチュエータ21で実現できる効率的な振動制御装置1を提供することができる。
【0075】
また、負荷を制御するステップST17,ST18は、加算結果が0より大きい場合、負荷を減少させるステップST17と、加算結果が0より小さい場合、負荷を増加させるステップST18からなるので、加算結果が0となる方向に負荷を制御し、さらに迅速に釣り合い位置を設定することができる
また、荷重支持部10の加速度を取得するステップST2の前に、制振用アクチュエータ21を加振するステップST1を有するので、規則的な振動による加速度を得ることができ、さらに精度良く釣り合い位置を設定することができる
また、加速度を加算するステップST4は、上下ピーク値を加算するので、少ないデータで計算し、さらに迅速に釣り合い位置を設定することができる
【図面の簡単な説明】
【0076】
【図1】第1実施形態の振動制御装置を示す図である。
【図2】振動制御装置のシステム構成を示したブロック図である。
【図3】プリロード調整制御のアバウト設定制御フローチャートを示す図である。
【図4】プリロード調整制御の第1実施形態の微調整制御フローチャートを示す図である。
【図5】プリロード調整制御の第2実施形態の微調整制御フローチャートを示す図である。
【図6】プリロード調整制御時の振動制御装置の状態を示す図である。
【図7】振動制御のフローチャートを示す図である。
【図8】振動制御時の振動制御装置の状態を示す図である。
【符号の説明】
【0077】
1…振動制御装置、10…荷重支持部、11…第1スライダレール(第1案内手段)、12…第1スライダ(第1移動手段)、13…荷重支持部材、20…振動制御部、21…制振用アクチュエータ(振動制御手段)、30…カウンタバランス部、31…第2スライダレール(第2案内手段)、32…第2スライダ(第2移動手段)、33…天秤部、34…プリロード調整用アクチュエータ(調整手段)、35…スプリング(付勢手段)、40…入力手段、41…加速度センサ(加速度検知手段)、42…変位センサ(変位検知手段)、50…ECU(制御手段)、51…負荷設定部、52…プリロード調整用アクチュエータ制御部(調整手段制御部)、53…制振用アクチュエータ制御部(振動制御手段制御部)、54…記憶部
【特許請求の範囲】
【請求項1】
設置部に設置され、前記設置部に対して相対移動する荷重支持部と、前記荷重支持部と連結され荷重と釣り合う負荷を与え、前記荷重支持部に対して相対移動するカウンタバランス部と、前記荷重支持部の前記設置部に対する振動を制御する振動制御手段を有する振動制御部と、前記荷重支持部の加速度を検知する加速度検知手段と、前記カウンタバランス部の負荷を調整する調整手段と、を備えた振動制御装置において、
前記加速度検知手段の検知した値を加算する計算部と、前記計算部の結果に応じて、前記調整手段の負荷を設定する負荷設定部と、前記負荷設定部の設定した負荷に応じて前記調整手段に駆動信号を与える調整手段制御部と、前記振動制御手段の変位中心を記憶する記憶部と、を有する制御手段を備え、
前記制御手段は、前記調整手段の負荷を調整することで、前記振動制御手段を前記記憶部の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定することを特徴とする振動制御装置。
【請求項2】
前記振動制御手段に駆動信号を与える振動制御手段制御部と、を備え、前記振動制御手段制御部が前記振動制御手段を駆動させて生じた前記荷重支持部の振動の加速度を前記加速度検知手段が検知することを特徴とする請求項1に記載の振動制御装置。
【請求項3】
前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算し、加算した加速度に応じて、前記負荷を制御することを特徴とする請求項2に記載の振動制御装置。
【請求項4】
前記負荷設定部は、前記加算結果が0より大きい場合、前記負荷を減少させるよう設定し、前記加算結果が0より小さい場合、前記負荷を増加させるよう設定することを特徴とする請求項3に記載の振動制御装置。
【請求項5】
前記加速度検知手段が前記荷重支持部の加速度を取得する前に、振動制御手段制御部が振動制御手段を加振することを特徴とする請求項3又は請求項4に記載の振動制御装置。
【請求項6】
前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算する際、上下ピーク値を加算することを特徴とする請求項3乃至請求項5のいずれかに記載の振動制御装置。
【請求項7】
設置部に設置された荷重支持部に連結されたカウンタバランス部により荷重と釣り合う負荷を与える振動制御方法において、
前記荷重支持部の加速度を取得するステップと、
前記加速度を加算するステップと、
加算した加速度に応じて、前記負荷を制御するステップと、
を有することを特徴とする振動制御方法。
【請求項8】
前記負荷を制御するステップは、前記加算結果が0より大きい場合、前記負荷を減少させるステップと、前記加算結果が0より小さい場合、前記負荷を増加させるステップからなることを特徴とする請求項7に記載の振動制御方法。
【請求項9】
前記荷重支持部の加速度を取得するステップの前に、振動制御手段を加振するステップを有することを特徴とする請求項7又は請求項8に記載の振動制御方法。
【請求項10】
前記加速度を加算するステップは、上下ピーク値を加算することを特徴とする請求項7乃至請求項9のいずれかに記載の振動制御方法。
【請求項1】
設置部に設置され、前記設置部に対して相対移動する荷重支持部と、前記荷重支持部と連結され荷重と釣り合う負荷を与え、前記荷重支持部に対して相対移動するカウンタバランス部と、前記荷重支持部の前記設置部に対する振動を制御する振動制御手段を有する振動制御部と、前記荷重支持部の加速度を検知する加速度検知手段と、前記カウンタバランス部の負荷を調整する調整手段と、を備えた振動制御装置において、
前記加速度検知手段の検知した値を加算する計算部と、前記計算部の結果に応じて、前記調整手段の負荷を設定する負荷設定部と、前記負荷設定部の設定した負荷に応じて前記調整手段に駆動信号を与える調整手段制御部と、前記振動制御手段の変位中心を記憶する記憶部と、を有する制御手段を備え、
前記制御手段は、前記調整手段の負荷を調整することで、前記振動制御手段を前記記憶部の記憶した変位中心に配置させると共に、荷重に対する力の釣り合いを設定することを特徴とする振動制御装置。
【請求項2】
前記振動制御手段に駆動信号を与える振動制御手段制御部と、を備え、前記振動制御手段制御部が前記振動制御手段を駆動させて生じた前記荷重支持部の振動の加速度を前記加速度検知手段が検知することを特徴とする請求項1に記載の振動制御装置。
【請求項3】
前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算し、加算した加速度に応じて、前記負荷を制御することを特徴とする請求項2に記載の振動制御装置。
【請求項4】
前記負荷設定部は、前記加算結果が0より大きい場合、前記負荷を減少させるよう設定し、前記加算結果が0より小さい場合、前記負荷を増加させるよう設定することを特徴とする請求項3に記載の振動制御装置。
【請求項5】
前記加速度検知手段が前記荷重支持部の加速度を取得する前に、振動制御手段制御部が振動制御手段を加振することを特徴とする請求項3又は請求項4に記載の振動制御装置。
【請求項6】
前記負荷設定部は、前記加速度検知手段が取得した前記荷重支持部の加速度を前記計算部で加算する際、上下ピーク値を加算することを特徴とする請求項3乃至請求項5のいずれかに記載の振動制御装置。
【請求項7】
設置部に設置された荷重支持部に連結されたカウンタバランス部により荷重と釣り合う負荷を与える振動制御方法において、
前記荷重支持部の加速度を取得するステップと、
前記加速度を加算するステップと、
加算した加速度に応じて、前記負荷を制御するステップと、
を有することを特徴とする振動制御方法。
【請求項8】
前記負荷を制御するステップは、前記加算結果が0より大きい場合、前記負荷を減少させるステップと、前記加算結果が0より小さい場合、前記負荷を増加させるステップからなることを特徴とする請求項7に記載の振動制御方法。
【請求項9】
前記荷重支持部の加速度を取得するステップの前に、振動制御手段を加振するステップを有することを特徴とする請求項7又は請求項8に記載の振動制御方法。
【請求項10】
前記加速度を加算するステップは、上下ピーク値を加算することを特徴とする請求項7乃至請求項9のいずれかに記載の振動制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−24860(P2009−24860A)
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願番号】特願2007−191637(P2007−191637)
【出願日】平成19年7月24日(2007.7.24)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願日】平成19年7月24日(2007.7.24)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]