
振動式フィーダ
【課題】 トラフ面の加振方向を容易に変更することができると共に物品停止性能を向上した振動式フィーダを提供する。
【解決手段】 搬送方向Aに対して斜め上方方向に加振力を与えて、トラフ21上の物品を搬送する振動式フィーダ1であって、トラフ21と、トラフ21を支持するフレーム22と、フレーム22に支持された加振機23とを有する可動ユニット20を備え、可動ユニット20が固定部材10に対して弾性支持され、加振機23は、平行に配置した一対の回転軸23b′,23b′と、両回転軸23b′,23b′に互いに対称的に取付けた不平衡ロータ23c,23cと、それらを対称状態を維持して逆方向に回転させるステッピングモータ23b,23bとを有して、不平衡ロータ23c,23cの回転により加振力を発生し、かつ、加振機23は、フレーム22に、搬送方向Aに対して水平方向に直交する支点軸24を介して回動可能に支持される。
【解決手段】 搬送方向Aに対して斜め上方方向に加振力を与えて、トラフ21上の物品を搬送する振動式フィーダ1であって、トラフ21と、トラフ21を支持するフレーム22と、フレーム22に支持された加振機23とを有する可動ユニット20を備え、可動ユニット20が固定部材10に対して弾性支持され、加振機23は、平行に配置した一対の回転軸23b′,23b′と、両回転軸23b′,23b′に互いに対称的に取付けた不平衡ロータ23c,23cと、それらを対称状態を維持して逆方向に回転させるステッピングモータ23b,23bとを有して、不平衡ロータ23c,23cの回転により加振力を発生し、かつ、加振機23は、フレーム22に、搬送方向Aに対して水平方向に直交する支点軸24を介して回動可能に支持される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定の振動を加えることによって、トラフに積載された物品を効率的に搬送することができる振動式フィーダに関し、物品搬送の技術分野に属する。
【背景技術】
【0002】
従来、トラフを振動させて物品を搬送する各種振動式フィーダがある。例えば一般的に多く用いられる板バネを使用した振動式フィーダは、トラフを複数の板バネで支持すると共に、この板バネに固着された磁性体を電磁石で間欠的に吸引することによって振動を発生させる構造である。この振動は、搬送方向に対して斜め上方に設定され、前記電磁石の通電を切ったときに板バネの復元力によりトラフ上の物品を斜め上方に跳ね上げて物品を搬送する。
【0003】
一方、このような板バネを用いた振動式フィーダにおいては、物品が積載されるトラフ面の加振方向は機構により一義的に決定される。つまり、このような振動式フィーダにおいては、板バネの取り付け角度によりトラフ面の加振方向が決定されるのである。
【0004】
ここで、物品を所望の搬送状態とするためには、トラフ面の加振方向は重要な要素である。すなわち、トラフが同一の振幅量で振動している場合であっても、物品とトラフとの静・動摩擦係数及び両者の接触面積や物品の変形のしやすさが異なり、例えば搬送速度の最大化等を図る場合には、各物品ごとに最適となる加振方向が異なることになる。また、損傷しやすい物品を搬送するときは、加振方向を水平方向に近づけて垂直方向の振動成分を可能な限り低減させることにより、物品の上方への跳躍を抑えることが望ましく、また、粘着物等を搬送するときは、トラフ面から物品が良好に離脱しうる垂直方向の振動成分を得るために、加振方向を垂直方向に近づけることが望ましい。
【0005】
このように、各物品ごとの最適な加振方向はそれぞれ異なるが、前記のような板バネを使用した振動式フィーダにおいては、加振方向の変更を例えば板バネの取り付け角度を変化させるような大幅な改造によって実現する必要がある。しかし、同一構造のフィーダにおいてその変更は困難であるので、現実的には加振方向の異なるフィーダを数種類用意して、これらのフィーダから各物品に応じて許容できる加振方向を有するものを選択するようにせざるを得ず、コスト高騰を招く。
【0006】
これに対して、特許文献1に記載の振動式フィーダは、水平方向に配置された棒状の振動体の両端部に軸線対称の切欠きを設け、この切欠き部を可撓部として前記板バネに代える構造であって、加振方向の変更に際して、前記振動体を所望の角度に回動させた上でナットで締結固定して加振方向の変更作業の容易化を図っている。
【0007】
【特許文献1】特開平5−246526号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、前記特許文献1に記載の振動式フィーダは、板バネを使用したものに比べればトラフ面の加振方向の変更作業は容易であるが、ナットを外して振動体を所望される角度に調整し、再びナットで締結固定するという作業は、依然として煩雑である。
【0009】
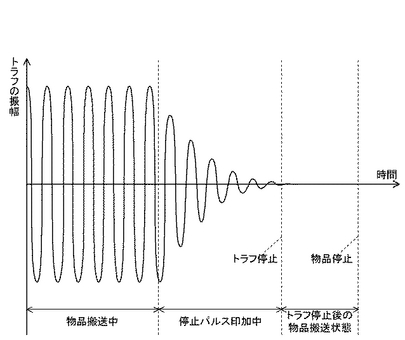
また、計量機等に用いられて、一定量の物品を断続的に搬送してホッパ等に供給する振動式フィーダでは、搬送量の精度を上げるためにはトラフに積載された物品の搬送を速やかに停止させる必要がある。このような振動式フィーダの物品停止性能は、短時間の物品の搬送・停止を繰り返す高速断続運転時、比較的少量の物品を搬送する少量搬送時、搬送する物品の個数が問題になる個数搬送時等において重要となる。これに対して従来の板バネを用いた振動式フィーダでは、トラフを強制的に停止させる手法として、停止時に板バネを振動させる電磁石に所定の停止パルスを印加する方法が採られていた。しかし実際には、図13に示すように、トラフが停止した後も物品は前進し続けるため(トラフ停止後の物品搬送状態)、トラフ停止後暫くした後に物品は停止することになる。その結果、トラフを停止させて得る以上の物品停止性能が要求される場合には、トラフ前方にゲート等を配備して強制停止を行う必要があり、機械構成の複雑化や清掃の煩雑化を招く原因となる。
【0010】
そこで、本発明は、トラフ面の加振方向を容易に変更することができると共に物品停止性能を向上した振動式フィーダを提供することを課題とする。
【課題を解決するための手段】
【0011】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0012】
まず、請求項1に記載の発明は、トラフの物品搬送方向に対して斜め上方方向に加振力を与えて、トラフ上の物品を搬送する振動式フィーダであって、前記トラフと、該トラフを支持するフレームと、該フレームに支持された加振機とを有する可動ユニットが備えられ、該可動ユニットが固定部材に対して弾性支持されていると共に、前記加振機は、平行に配置された一対の回転軸と、両回転軸に互いに対称的に取り付けられた不平衡ロータと、それらを対称状態を維持して逆方向に回転させる駆動源とを有し、前記不平衡ロータの回転により前記加振力を発生させるように構成され、かつ、該加振機は、前記フレームに、物品搬送方向に対して水平方向に直交する支点軸を介して回動可能に支持されていることを特徴とする。
【0013】
次に、請求項2に記載の発明は、前記請求項1に記載の振動式フィーダにおいて、一対の回転軸は、支点軸上に並んで該支点軸と直交する方向に配置されていることを特徴とする。
【0014】
次に、請求項3に記載の発明は、前記請求項1に記載の振動式フィーダにおいて、一対の回転軸は、支点軸の両側に該支点軸に対して平行に配置されていることを特徴とする。
【0015】
次に、請求項4に記載の発明は、前記請求項1から請求項3のいずれかに記載の振動式フィーダにおいて、支点軸は、その軸心が可動ユニットの重心位置を通ることを特徴とする。
【0016】
次に、請求項5に記載の発明は、前記請求項1から請求項4のいずれかに記載の振動式フィーダにおいて、加振機を回動させるアクチュエータと、該アクチュエータの作動を制御する制御手段とが備えられていることを特徴とする。
【0017】
次に、請求項6に記載の発明は、前記請求項5に記載の振動式フィーダにおいて、アクチュエータは、その重心が支点軸の軸心上に位置するように配置されていることを特徴とする。
【0018】
次に、請求項7に記載の発明は、前記請求項5または請求項6に記載の振動式フィーダにおいて、各物品ごとに加振方向を記憶する記憶手段と、物品を識別する識別手段と、該識別手段により識別された物品の加振方向を前記記憶手段から読み出す読出手段とが備えられ、制御手段は、前記読出手段で読み出した加振方向を実現するようにアクチュエータを制御することを特徴とする。
【0019】
そして、請求項8に記載の発明は、前記請求項5から請求項7のいずれかに記載の振動式フィーダにおいて、制御手段は、物品の搬送を停止させるときは、加振方向が反物品搬送方向に対して斜め上方方向になるようにアクチュエータを制御することを特徴とする。
【発明の効果】
【0020】
まず、請求項1に記載の発明によれば、加振機は、一対の不平衡ロータの対称状態を維持した逆方向の回転によって加振力を発生させる一方、加振機で発生した加振力は、該加振機を支持する支点軸を介してフレーム、さらにフレームに支持されたトラフに伝達され、つまり可動ユニット全体が振動することになって、トラフに積載された物品に搬送のための加振力を与えることができる。このとき、フレームに回動可能に支持された加振機の角度に応じてトラフ面の加振方向が決定されるので、加振機を回動させて角度を変更するだけでトラフ面の加振方向を任意に変更することができ、加振方向の変更作業の大幅な容易化が実現される。
【0021】
一方、本発明のような不平衡ロータを用いた加振機は、板バネを用いたフィーダのように共振周波数を利用したものではなく、共振周波数から離れた周波数で強制的に可動ユニットを振動させることができるので、駆動源を停止させたときには速やかに振動が停止し、物品停止性能が向上することになる。
【0022】
次に、請求項2に記載の発明によれば、一対の回転軸を支点軸上に並んで該支点軸と直交する方向に配置したので、一対の不平衡ロータが同一水平面内に位置することになって、加振機の高さを抑えることができ、振動式フィーダの垂直面内でのコンパクト化を実現することができる。
【0023】
次に、請求項3に記載の発明によれば、一対の回転軸を支点軸の両側に該支点軸に対して平行に配置したので、一対の不平衡ロータが同一垂直面内に位置することになって、加振機の幅を抑えることができ、振動式フィーダの水平面内でのコンパクト化を実現することができる。
【0024】
次に、請求項4に記載の発明によれば、支点軸の軸心が可動ユニットの重心位置を通るように構成したので、加振機により発生した加振力の加振方向とトラフ面各部の加振方向とを同じ角度に統一することができ、その結果、加振機の回動量に応じてトラフ面各部の加振方向を正確に設定することができる。
【0025】
次に、請求項5に記載の発明によれば、加振機を回動させるアクチュエータと、該アクチュエータの作動を制御する制御手段とを備えたことにより、アクチュエータの作動により加振機の角度を任意に変更することができるので、トラフ面の加振方向の変更作業の自動化及び高速化が実現される。また、振動式フィーダの動作中でも加振方向を変更することができるという利点もある。
【0026】
次に、請求項6に記載の発明によれば、アクチュエータの重心が支点軸の軸心上に位置するように配置することによって、可動ユニットにアクチュエータを取り付けても可動ユニットの重心位置が支点軸の軸心上からずれることがなく、加振機の回動量に応じたトラフ面の加振方向の精度を維持することができる。
【0027】
次に、請求項7に記載の発明によれば、各物品ごとにトラフ面の加振方向を記憶した記憶手段と、物品を識別する識別手段と、該識別手段により識別された物品の加振方向を前記記憶手段から読み出す読出手段とを備え、制御手段は、前記読出手段で読み出した加振方向を実現するようにアクチュエータを駆動させ、加振機を回動させる構造としたので、トラフ面の加振方向の変更作業を一層自動化及び高速化することができる。
【0028】
そして、請求項8に記載の発明によれば、物品の搬送を停止させるときには、制御手段により加振方向が反物品搬送方向に対して斜め上方方向になるようにアクチュエータを制御することによって、物品搬送時とは逆方向の力をトラフ上の物品に与えて物品を強制的に停止させることができ、物品停止性能が一層向上することになる。さらに、アクチュエータにより瞬時に加振方向の変更を実現する構成においては、短時間の搬送・停止を繰り返す高速断続運転を正確に行えると共に、物品停止性能が問題となる少量搬送時や個数搬送時等においても良好な搬送状態が得られることになる。また、従来用いていたゲート等が不要になり、機械構造の簡略化、清掃の容易化を図ることができるという利点もある。
【発明を実施するための最良の形態】
【0029】
以下、本発明の実施の形態について説明する。
【0030】
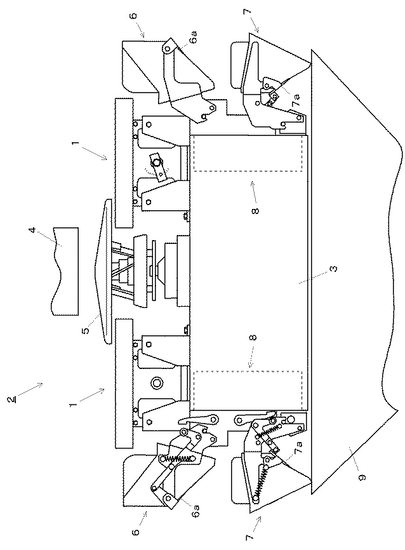
図1は、振動式フィーダ1を備えた組合せ計量装置2の概略の構成を示す。この組合せ計量装置2には、機台3の中央上部に設置されて上方の筒状の投入シュート4から投下された物品を周囲に分散させる分散テーブル5と、その周囲にそれぞれ放射状に配設されて物品を搬送する振動式フィーダ1…1と、これらのフィーダ1…1の下流部下方にそれぞれ位置するように円形に配設された複数のプールホッパ6…6と、それぞれのプールホッパ6…6の下方に配設された計量ホッパ7…7とが設けられている。
【0031】
そして、前記機台3の内部には、これらのプールホッパ6…6のゲート6a…6a及び計量ホッパ7…7のゲート7a…7aの開閉を制御するゲート開閉装置8…8が配設されている。そして、これらのゲート開閉装置8…8は、物品排出指令を受けたときに、計量ホッパ7内の物品を集合シュート9内に排出させ、空になった該計量ホッパ7内にプールホッパ6内に貯留された物品を投入させるように動作する。また、この計量ホッパ7には、図示しない重量検出装置が連結されており、該重量検出装置は、計量ホッパ7内に貯留された物品の重量を計量する。
【0032】
次に、図2〜5を用いて前記振動式フィーダ1の構造について説明する。
【0033】
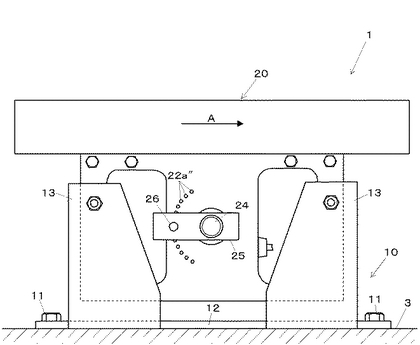
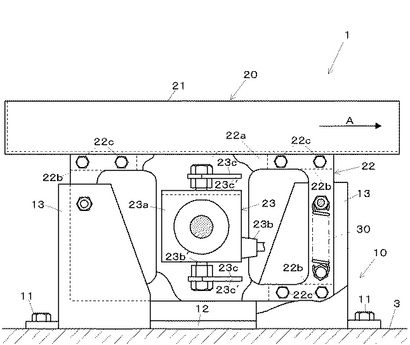
図2に示すように、前記振動式フィーダ1は、前記機台3に固定された固定部材10と、この固定部材10に弾性支持された可動ユニット20とで構成されている。
【0034】
固定部材10は、複数のボルト11…11で前記機台3に締結固定される締結部12と、該締結部12から上方に折曲して設けられた4つの支持部13…13とで構成されている。
【0035】
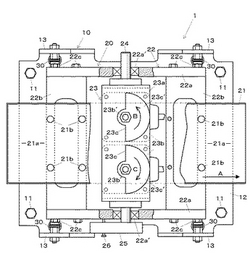
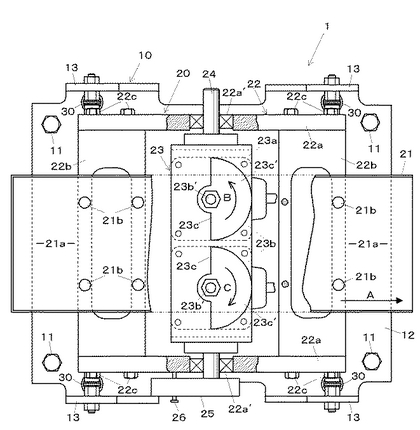
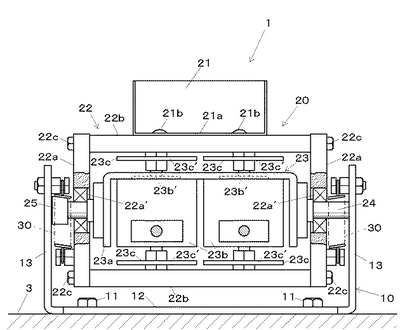
図3〜5に示すように、可動ユニット20は、物品が積載されるトラフ面21aを形成するトラフ21と、該トラフ21を支持するフレーム22と、該フレーム22に回動可能に支持された加振機23とで構成されている。
【0036】
フレーム22は、一対のプレート部材22a,22aが搬送方向に平行に対向して配置されていると共に、プレート部材22a,22aの四隅にそれぞれ連結部材22b…22bの両端をボルト22c…22cで締結することによって、両プレート部材22a,22aが連結された構成であり、前記トラフ21は上部に位置する連結部材22b,22b上部にピン21b…21bで固定されている。また、両プレート部材22a,22a間に、軸受22a′,22a′を介して支点軸24が回動可能に支持されており、この支点軸24に前記加振機23が固定されている。一方、支点軸24の一端にはレバー部材25が固着され、このレバー部材25に設けられた図示しない孔部と、前記プレート部材22aの表面に10°毎の円弧上に設けられた孔部22a″…22a″(図2参照)のいずれかとをピン26で差してレバー部材25の角度を固定する。そして、レバー部材25の角度を固定することによって、支点軸24の角度ひいては加振機23の角度が決定される。さらに、支点軸24は、その軸心が可動ユニット20の重心を通るように配置されている。
【0037】
加振機23は、支点軸24に固着された側面視コ字状の支持部材23aに一対のステッピングモータ23b,23bが吊り下げ支持され、このモータ23b,23bの回転軸23b′,23b′が支点軸24と直交するように並んで配置される一方、このモータ23b,23bの上下に突出する回転軸23b′,23b′の両端にはそれぞれ不平衡ロータ23c…23cが取り付けられた構成とされている。両回転軸23b′,23b′に取り付けられた不平衡ロータ23c…23cは、半円形に形成されたウエイト部23c′…23c′が互いに対称的に位置するように構成されている。このような構成において、加振機23の加振周波数は、ステッピングモータ23b,23bの回転数によって調整することができる一方、加振力は、ウエイト部23c′…23c′の重量や形状を変えることで調整することができる。
【0038】
そして、前記固定部材10の各支持部13…13の上部と前記可動ユニット20のプレート部材22a,22aの搬送方向A両端部の下部とがそれぞれ引張バネ30…30で接続され、これによって、可動ユニット20は、機台3に固定された支持部材10に弾性的に吊り下げられる構造となっている。
【0039】
以上のような振動式フィーダ1の構造によって、加振機23で発生された加振力をトラフ21上に積載された物品に与え、物品を搬送方向Aに搬送することができる。すなわち、加振機23は、各ステッピングモータ23b,23bの回転軸23b′,23b′が互いに逆方向(図3の矢印B,C参照)に同速度で回転するように制御され、これによって加振機23は、該加振機23の角度に応じて、搬送方向Aに対する上下方向に傾斜させた方向を加振方向とする加振力を発生させる。なお、搬送幅方向への加振力は、対称的に配置された不平衡ロータ23c…23cの構造上相殺されることになる。そして、加振機23で発生した加振力は、該加振機23が固定された支点軸24、そして軸受22a′,22a′を介して該支点軸24を支持するフレーム22、さらに該フレーム22に固定されたトラフ21に伝達され、可動ユニット20全体を振動させてトラフ21上の物品に搬送のための加振力を与えることになる。このとき、支点軸24の軸心が可動ユニット20の重心を通るように構成したので、加振機23の加振方向を可動ユニット20全体の振動方向と一致させることができると共にトラフ面21aの各部の加振方向をその方向に統一させることができる。
【0040】
このように、フレーム22に回動可能に支持された加振機23の角度に応じてトラフ面21aの加振方向が決定されるので、加振機23を回動させて角度を変更するだけでトラフ面21aの加振方向を任意に変更することができ、加振方向の変更作業の大幅な容易化が実現される。
【0041】
一方、このような不平衡ロータ23c…23cを用いた加振機23は、従来の板バネを用いたフィーダのように共振周波数を利用したものではなく、共振周波数から離れた周波数で強制的に可動ユニット20を振動させることができるので、ステッピングモータ23b,23bを停止させたときには速やかにトラフ面21aの振動が停止し、物品停止性能が向上することになる。
【0042】
また、回転軸23b′,23b′が支点軸24上に並んで該支点軸24と直交する方向に位置するようにステッピングモータ23b,23bを配置したので、それぞれの回転軸23b′,23b′に取り付けられた不平衡ロータ23c…23cが水平面内に並んで位置することになり、その結果、加振機23の高さを抑えることができ、振動式フィーダ1の垂直面内でのコンパクト化を実現することができる。
【0043】
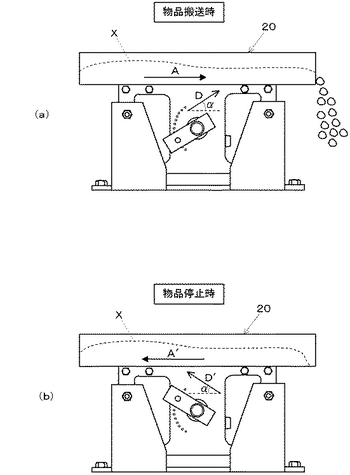
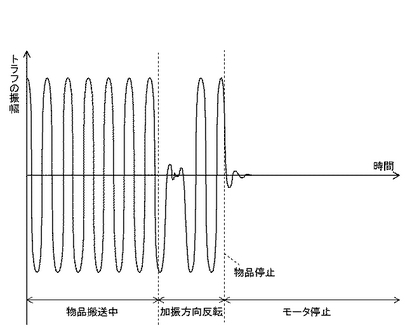
また、通常の物品搬送状態においては、図6(a)に示すように、レバー部材25を図例の角度に設定することにより、加振方向Dは搬送方向Aに対して上方に傾斜させた方向に設定され、可動ユニット20の振動に際して、物品Xに加振力を与えるときには物品Xを加振方向Dに跳ね上げて物品Xを搬送する。一方、物品Xの搬送を停止させるときであって、ステッピングモータ23b,23bを停止させる以上の物品停止性能が要求される場合は、図6(b)に示すように、レバー部材25を図例の角度に設定することにより、加振方向D′は反搬送方向A′に対して上方に傾斜させた方向に設定される。このように加振方向を反転させたときには、図7に示すように、物品Xには反搬送方向A′の加振力が加えられ、慣性で搬送方向Aに進む物品Xを強制的に停止させることができる。そして、物品Xが搬送される方向が搬送方向Aから反搬送方向A′に反転するタイミングで、前記ステッピングモータ23b,23bを停止させることにより、物品Xが停止することになる。なお、最も物品搬送速度が大きくなる加振方向Dが搬送方向Aに対して角度α上方に傾斜させたものであるときには、物品Xの搬送を停止させる場合には反搬送方向A′に対して角度α上方に傾斜させるように加振方向Dを反転させることによって、物品Xに対して最も大きな反搬送方向A′の強制力が働き、物品Xの搬送を最も迅速に停止させることができる。
【0044】
なお、加振機23は、両回転軸23b′,23b′を回転させるためにそれぞれに独立のステッピングモータ23b,23bを備え、これによって両回転軸23b′,23b′の回転数をより緻密に制御できる構造としているが、1つのモータでギア又はベルト等を介して両回転軸23b′,23b′を逆位相になるよう回転させる構造にして、機構の簡素化を図るようにしてもよい。また、支点軸24の軸心から可動ユニット20の重心を敢えてずらすことで、トラフ面21a各部における加振方向に変化をつけることも可能である。さらに、加振機23を支点軸24に固定して、支点軸24を回動させることにより加振機23の角度を変更できる構造としたが、支点軸24をフレーム22に対して固定とし、支点軸24に対して加振機23が回動可能に支持されている構造としてもよい。そして、これらは以下に説明する本発明の第2、第3の実施の形態においても同様である。
【0045】
次に、本発明の第2の実施の形態について説明する。
【0046】
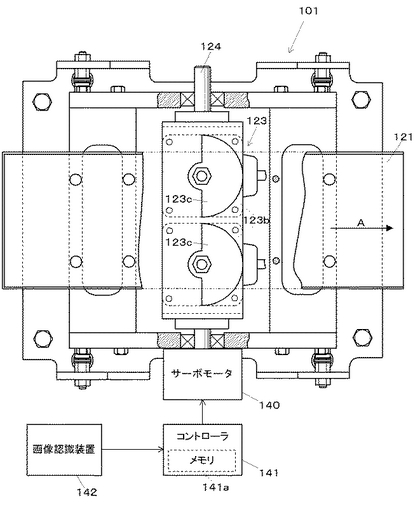
図8に示す振動式フィーダ101は、加振機123が固定された支点軸124の一端部にサーボモータ140が取り付けられいると共に、このサーボモータ140と不平衡ロータ123c…123cを回転させるステッピングモータ123b,123bとを制御するコントローラ141と、トラフ121上に積載された物品を識別する画像認識装置142とを備えている。前記サーボモータ140は、コントローラ141からの制御信号により支点軸124を任意の角度に回動させ、その角度を維持することができる。一方、前記画像認識装置142は、例えばCCDカメラによりトラフ121上の物品の画像を取得し、物品の大きさ、形状、色彩等に基いて物品を識別するものである。
【0047】
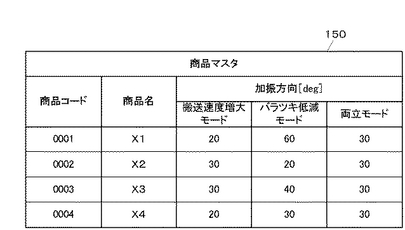
また、前記コントローラ141には、メモリ141aが内蔵され、このメモリ141aには物品毎の最適な加振方向等のデータを有する商品マスタ150(図11参照)が格納されている。そして、前記コントローラ141は、前記画像認識装置142により識別された物品の種類に応じて、前記メモリ141aから該当する物品のデータを読み出して、前記サーボモータ140を制御する。なお、商品マスタ150には、ステッピングモータ123b,123bの回転数のデータを格納して、物品ごとに加振周波数を変化させるようにすることもできる。
【0048】
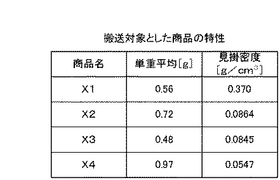
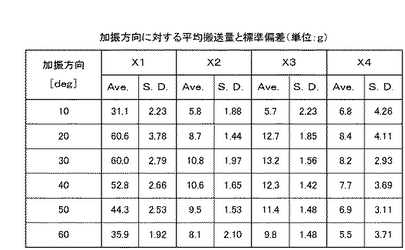
ここで、前記商品マスタ150における加振方向のデータとは、例えば以下のようにして生成される、まず、図9に示すような、単重平均及び見掛密度が異なる商品X1〜X4があり、それぞれについて搬送方向Aに対する上方への傾斜角度を0〜60°間で10°毎に加振方向を変化させて設定し、それぞれの加振方向で物品を搬送したときの平均搬送量Ave.と標準偏差S.D.を測定し、図10に示すような結果が得られた。このとき、商品X1〜X4に応じて、平均搬送量Ave.が最大、つまり物品搬送速度が最大となる加振方向、及び標準偏差S.D.が最小、つまり物品のバラツキが最小となる加振方向が異なるので、メモリ141aに格納された商品マスタ150は図11に示すように、搬送速度増大モード、バラツキ低減モード、そして搬送速度増大とバラツキ低減とを両立させる両立モードに対応する3種類の加振方向のデータを用意して、状況に応じて予め作業者によりモードを指定し、指定されたモードに対応した数値を読み出すようになっている。また、物品搬送時間及び物品停止時間を設定して、物品搬送時には通常の加振方向で物品搬送を行い(図6(a)の搬送状態)、物品停止時には加振方向を反転させると共に物品停止後にステッピングモータ123b,123bを停止させる(図6(b)の搬送状態)ようにプログラムし、これを繰り返すことで、短時間の物品の搬送・停止を繰り返す高速断続運転モード、比較的少量の物品を搬送する少量搬送モード、搬送する物品の個数を制御する個数搬送モード等の搬送モードを実現するようにすることもできる。
【0049】
なお、前記サーボモータ140は、支点軸124の軸心上に重心が位置するように配置され、これを取り付けたことによって可動ユニット120の重心が支点軸124の軸心からずれないようになっている。また、支点軸124を回動させるアクチュエータは、サーボモータ140に限らず、ステッピングモータ、エアシリンダ、又はソレノイド等であってもよい。
【0050】
このように、この実施形態においては、加振方向の変更をサーボモータ140で機械的に行うことによって、加振方向の変更作業の自動化及び高速化が実現されると共に、振動式フィーダ1の動作中でも加振方向の変更作業を行うことができる。さらに、画像認識装置142により識別した物品のデータをコントローラ141のメモリ141aに格納された商品マスタ150から読み出してサーボモータ140を制御することによって一層の自動化及び高速化が実現される。
【0051】
また、サーボモータ140により瞬時に加振方向の変更を実現することができるので、高速断続運転時、少量搬送時、及び個数搬送時等を行う場合も良好な搬送状態が得られることになる。
【0052】
次に、本発明の第3の実施の形態について説明する。
【0053】
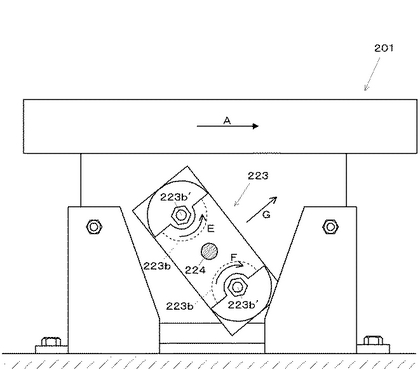
図12に示すように、振動式フィーダ201に備えられた加振機223は、支点軸224の両側に回転軸223b′,223b′が平行になるよう各ステッピングモータ223b,223bが配置された構造である。そして、各回転軸223b′,223b′を逆方向(矢印E,F参照)で同じ回転数で回転させることによって、加振機223は、前記第1の実施の形態の構成と同様に搬送方向Aに対する上下方向に傾斜させた方向を加振方向Gとすることができる。さらに、支点軸224を回動させることによって加振方向Gを変更することができる。
【0054】
このように、回転軸223b′,223b′が支点軸224の両側に該支点軸224に対して平行になるように構成したので、不平衡ロータ223c…223cが同一垂直面内に位置することになるので、加振機223の幅を抑えることができ、振動式フィーダ201の水平面内でのコンパクト化を実現することができる。
【産業上の利用可能性】
【0055】
本発明は、トラフ面の加振方向を容易に変更することができると共に物品停止性能を向上した振動式フィーダを提供する。本発明は、所定の振動を加えることによって、トラフに積載された物品を効率的に搬送することができる振動式フィーダに関し、物品搬送の技術分野に広く好適である。
【図面の簡単な説明】
【0056】
【図1】本発明の実施の形態に係る振動式フィーダを備えた組み合わせ計量装置の正面である。
【図2】同振動式フィーダの正面図である。
【図3】同振動式フィーダの一部切欠き平面図である。
【図4】同振動式フィーダの一部切欠き正面図である。
【図5】同振動式フィーダの一部切欠き側面図である。
【図6】加振方向に応じた物品の搬送状態を示す説明図である。
【図7】トラフの振幅の時間的変化と物品の搬送停止との関係を示すグラフである。
【図8】本発明の第2の実施の形態に係る振動式フィーダの平面図である。
【図9】搬送対象とした商品の特性を示す表である
【図10】加振方向に対する平均搬送量と標準偏差とを示す図である。
【図11】コントローラのメモリに格納される商品マスタの例である。
【図12】本発明の第3の実施の形態に係る振動式フィーダの正面図である。
【図13】従来の板バネを用いた振動式フィーダにおけるトラフの振幅の時間的変化と物品の搬送停止との関係を示すグラフである。
【符号の説明】
【0057】
1 振動式フィーダ
20 可動ユニット
21 トラフ
22 フレーム
23 加振機
23b ステッピングモータ(駆動源)
23b′ 回転軸
23c 不平衡ロータ
24 支点軸
140 サーボモータ(アクチュエータ)
141 コントローラ(制御手段、読出手段)
141a メモリ(記憶手段)
142 画像認識装置(識別手段)
【技術分野】
【0001】
本発明は、所定の振動を加えることによって、トラフに積載された物品を効率的に搬送することができる振動式フィーダに関し、物品搬送の技術分野に属する。
【背景技術】
【0002】
従来、トラフを振動させて物品を搬送する各種振動式フィーダがある。例えば一般的に多く用いられる板バネを使用した振動式フィーダは、トラフを複数の板バネで支持すると共に、この板バネに固着された磁性体を電磁石で間欠的に吸引することによって振動を発生させる構造である。この振動は、搬送方向に対して斜め上方に設定され、前記電磁石の通電を切ったときに板バネの復元力によりトラフ上の物品を斜め上方に跳ね上げて物品を搬送する。
【0003】
一方、このような板バネを用いた振動式フィーダにおいては、物品が積載されるトラフ面の加振方向は機構により一義的に決定される。つまり、このような振動式フィーダにおいては、板バネの取り付け角度によりトラフ面の加振方向が決定されるのである。
【0004】
ここで、物品を所望の搬送状態とするためには、トラフ面の加振方向は重要な要素である。すなわち、トラフが同一の振幅量で振動している場合であっても、物品とトラフとの静・動摩擦係数及び両者の接触面積や物品の変形のしやすさが異なり、例えば搬送速度の最大化等を図る場合には、各物品ごとに最適となる加振方向が異なることになる。また、損傷しやすい物品を搬送するときは、加振方向を水平方向に近づけて垂直方向の振動成分を可能な限り低減させることにより、物品の上方への跳躍を抑えることが望ましく、また、粘着物等を搬送するときは、トラフ面から物品が良好に離脱しうる垂直方向の振動成分を得るために、加振方向を垂直方向に近づけることが望ましい。
【0005】
このように、各物品ごとの最適な加振方向はそれぞれ異なるが、前記のような板バネを使用した振動式フィーダにおいては、加振方向の変更を例えば板バネの取り付け角度を変化させるような大幅な改造によって実現する必要がある。しかし、同一構造のフィーダにおいてその変更は困難であるので、現実的には加振方向の異なるフィーダを数種類用意して、これらのフィーダから各物品に応じて許容できる加振方向を有するものを選択するようにせざるを得ず、コスト高騰を招く。
【0006】
これに対して、特許文献1に記載の振動式フィーダは、水平方向に配置された棒状の振動体の両端部に軸線対称の切欠きを設け、この切欠き部を可撓部として前記板バネに代える構造であって、加振方向の変更に際して、前記振動体を所望の角度に回動させた上でナットで締結固定して加振方向の変更作業の容易化を図っている。
【0007】
【特許文献1】特開平5−246526号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、前記特許文献1に記載の振動式フィーダは、板バネを使用したものに比べればトラフ面の加振方向の変更作業は容易であるが、ナットを外して振動体を所望される角度に調整し、再びナットで締結固定するという作業は、依然として煩雑である。
【0009】
また、計量機等に用いられて、一定量の物品を断続的に搬送してホッパ等に供給する振動式フィーダでは、搬送量の精度を上げるためにはトラフに積載された物品の搬送を速やかに停止させる必要がある。このような振動式フィーダの物品停止性能は、短時間の物品の搬送・停止を繰り返す高速断続運転時、比較的少量の物品を搬送する少量搬送時、搬送する物品の個数が問題になる個数搬送時等において重要となる。これに対して従来の板バネを用いた振動式フィーダでは、トラフを強制的に停止させる手法として、停止時に板バネを振動させる電磁石に所定の停止パルスを印加する方法が採られていた。しかし実際には、図13に示すように、トラフが停止した後も物品は前進し続けるため(トラフ停止後の物品搬送状態)、トラフ停止後暫くした後に物品は停止することになる。その結果、トラフを停止させて得る以上の物品停止性能が要求される場合には、トラフ前方にゲート等を配備して強制停止を行う必要があり、機械構成の複雑化や清掃の煩雑化を招く原因となる。
【0010】
そこで、本発明は、トラフ面の加振方向を容易に変更することができると共に物品停止性能を向上した振動式フィーダを提供することを課題とする。
【課題を解決するための手段】
【0011】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0012】
まず、請求項1に記載の発明は、トラフの物品搬送方向に対して斜め上方方向に加振力を与えて、トラフ上の物品を搬送する振動式フィーダであって、前記トラフと、該トラフを支持するフレームと、該フレームに支持された加振機とを有する可動ユニットが備えられ、該可動ユニットが固定部材に対して弾性支持されていると共に、前記加振機は、平行に配置された一対の回転軸と、両回転軸に互いに対称的に取り付けられた不平衡ロータと、それらを対称状態を維持して逆方向に回転させる駆動源とを有し、前記不平衡ロータの回転により前記加振力を発生させるように構成され、かつ、該加振機は、前記フレームに、物品搬送方向に対して水平方向に直交する支点軸を介して回動可能に支持されていることを特徴とする。
【0013】
次に、請求項2に記載の発明は、前記請求項1に記載の振動式フィーダにおいて、一対の回転軸は、支点軸上に並んで該支点軸と直交する方向に配置されていることを特徴とする。
【0014】
次に、請求項3に記載の発明は、前記請求項1に記載の振動式フィーダにおいて、一対の回転軸は、支点軸の両側に該支点軸に対して平行に配置されていることを特徴とする。
【0015】
次に、請求項4に記載の発明は、前記請求項1から請求項3のいずれかに記載の振動式フィーダにおいて、支点軸は、その軸心が可動ユニットの重心位置を通ることを特徴とする。
【0016】
次に、請求項5に記載の発明は、前記請求項1から請求項4のいずれかに記載の振動式フィーダにおいて、加振機を回動させるアクチュエータと、該アクチュエータの作動を制御する制御手段とが備えられていることを特徴とする。
【0017】
次に、請求項6に記載の発明は、前記請求項5に記載の振動式フィーダにおいて、アクチュエータは、その重心が支点軸の軸心上に位置するように配置されていることを特徴とする。
【0018】
次に、請求項7に記載の発明は、前記請求項5または請求項6に記載の振動式フィーダにおいて、各物品ごとに加振方向を記憶する記憶手段と、物品を識別する識別手段と、該識別手段により識別された物品の加振方向を前記記憶手段から読み出す読出手段とが備えられ、制御手段は、前記読出手段で読み出した加振方向を実現するようにアクチュエータを制御することを特徴とする。
【0019】
そして、請求項8に記載の発明は、前記請求項5から請求項7のいずれかに記載の振動式フィーダにおいて、制御手段は、物品の搬送を停止させるときは、加振方向が反物品搬送方向に対して斜め上方方向になるようにアクチュエータを制御することを特徴とする。
【発明の効果】
【0020】
まず、請求項1に記載の発明によれば、加振機は、一対の不平衡ロータの対称状態を維持した逆方向の回転によって加振力を発生させる一方、加振機で発生した加振力は、該加振機を支持する支点軸を介してフレーム、さらにフレームに支持されたトラフに伝達され、つまり可動ユニット全体が振動することになって、トラフに積載された物品に搬送のための加振力を与えることができる。このとき、フレームに回動可能に支持された加振機の角度に応じてトラフ面の加振方向が決定されるので、加振機を回動させて角度を変更するだけでトラフ面の加振方向を任意に変更することができ、加振方向の変更作業の大幅な容易化が実現される。
【0021】
一方、本発明のような不平衡ロータを用いた加振機は、板バネを用いたフィーダのように共振周波数を利用したものではなく、共振周波数から離れた周波数で強制的に可動ユニットを振動させることができるので、駆動源を停止させたときには速やかに振動が停止し、物品停止性能が向上することになる。
【0022】
次に、請求項2に記載の発明によれば、一対の回転軸を支点軸上に並んで該支点軸と直交する方向に配置したので、一対の不平衡ロータが同一水平面内に位置することになって、加振機の高さを抑えることができ、振動式フィーダの垂直面内でのコンパクト化を実現することができる。
【0023】
次に、請求項3に記載の発明によれば、一対の回転軸を支点軸の両側に該支点軸に対して平行に配置したので、一対の不平衡ロータが同一垂直面内に位置することになって、加振機の幅を抑えることができ、振動式フィーダの水平面内でのコンパクト化を実現することができる。
【0024】
次に、請求項4に記載の発明によれば、支点軸の軸心が可動ユニットの重心位置を通るように構成したので、加振機により発生した加振力の加振方向とトラフ面各部の加振方向とを同じ角度に統一することができ、その結果、加振機の回動量に応じてトラフ面各部の加振方向を正確に設定することができる。
【0025】
次に、請求項5に記載の発明によれば、加振機を回動させるアクチュエータと、該アクチュエータの作動を制御する制御手段とを備えたことにより、アクチュエータの作動により加振機の角度を任意に変更することができるので、トラフ面の加振方向の変更作業の自動化及び高速化が実現される。また、振動式フィーダの動作中でも加振方向を変更することができるという利点もある。
【0026】
次に、請求項6に記載の発明によれば、アクチュエータの重心が支点軸の軸心上に位置するように配置することによって、可動ユニットにアクチュエータを取り付けても可動ユニットの重心位置が支点軸の軸心上からずれることがなく、加振機の回動量に応じたトラフ面の加振方向の精度を維持することができる。
【0027】
次に、請求項7に記載の発明によれば、各物品ごとにトラフ面の加振方向を記憶した記憶手段と、物品を識別する識別手段と、該識別手段により識別された物品の加振方向を前記記憶手段から読み出す読出手段とを備え、制御手段は、前記読出手段で読み出した加振方向を実現するようにアクチュエータを駆動させ、加振機を回動させる構造としたので、トラフ面の加振方向の変更作業を一層自動化及び高速化することができる。
【0028】
そして、請求項8に記載の発明によれば、物品の搬送を停止させるときには、制御手段により加振方向が反物品搬送方向に対して斜め上方方向になるようにアクチュエータを制御することによって、物品搬送時とは逆方向の力をトラフ上の物品に与えて物品を強制的に停止させることができ、物品停止性能が一層向上することになる。さらに、アクチュエータにより瞬時に加振方向の変更を実現する構成においては、短時間の搬送・停止を繰り返す高速断続運転を正確に行えると共に、物品停止性能が問題となる少量搬送時や個数搬送時等においても良好な搬送状態が得られることになる。また、従来用いていたゲート等が不要になり、機械構造の簡略化、清掃の容易化を図ることができるという利点もある。
【発明を実施するための最良の形態】
【0029】
以下、本発明の実施の形態について説明する。
【0030】
図1は、振動式フィーダ1を備えた組合せ計量装置2の概略の構成を示す。この組合せ計量装置2には、機台3の中央上部に設置されて上方の筒状の投入シュート4から投下された物品を周囲に分散させる分散テーブル5と、その周囲にそれぞれ放射状に配設されて物品を搬送する振動式フィーダ1…1と、これらのフィーダ1…1の下流部下方にそれぞれ位置するように円形に配設された複数のプールホッパ6…6と、それぞれのプールホッパ6…6の下方に配設された計量ホッパ7…7とが設けられている。
【0031】
そして、前記機台3の内部には、これらのプールホッパ6…6のゲート6a…6a及び計量ホッパ7…7のゲート7a…7aの開閉を制御するゲート開閉装置8…8が配設されている。そして、これらのゲート開閉装置8…8は、物品排出指令を受けたときに、計量ホッパ7内の物品を集合シュート9内に排出させ、空になった該計量ホッパ7内にプールホッパ6内に貯留された物品を投入させるように動作する。また、この計量ホッパ7には、図示しない重量検出装置が連結されており、該重量検出装置は、計量ホッパ7内に貯留された物品の重量を計量する。
【0032】
次に、図2〜5を用いて前記振動式フィーダ1の構造について説明する。
【0033】
図2に示すように、前記振動式フィーダ1は、前記機台3に固定された固定部材10と、この固定部材10に弾性支持された可動ユニット20とで構成されている。
【0034】
固定部材10は、複数のボルト11…11で前記機台3に締結固定される締結部12と、該締結部12から上方に折曲して設けられた4つの支持部13…13とで構成されている。
【0035】
図3〜5に示すように、可動ユニット20は、物品が積載されるトラフ面21aを形成するトラフ21と、該トラフ21を支持するフレーム22と、該フレーム22に回動可能に支持された加振機23とで構成されている。
【0036】
フレーム22は、一対のプレート部材22a,22aが搬送方向に平行に対向して配置されていると共に、プレート部材22a,22aの四隅にそれぞれ連結部材22b…22bの両端をボルト22c…22cで締結することによって、両プレート部材22a,22aが連結された構成であり、前記トラフ21は上部に位置する連結部材22b,22b上部にピン21b…21bで固定されている。また、両プレート部材22a,22a間に、軸受22a′,22a′を介して支点軸24が回動可能に支持されており、この支点軸24に前記加振機23が固定されている。一方、支点軸24の一端にはレバー部材25が固着され、このレバー部材25に設けられた図示しない孔部と、前記プレート部材22aの表面に10°毎の円弧上に設けられた孔部22a″…22a″(図2参照)のいずれかとをピン26で差してレバー部材25の角度を固定する。そして、レバー部材25の角度を固定することによって、支点軸24の角度ひいては加振機23の角度が決定される。さらに、支点軸24は、その軸心が可動ユニット20の重心を通るように配置されている。
【0037】
加振機23は、支点軸24に固着された側面視コ字状の支持部材23aに一対のステッピングモータ23b,23bが吊り下げ支持され、このモータ23b,23bの回転軸23b′,23b′が支点軸24と直交するように並んで配置される一方、このモータ23b,23bの上下に突出する回転軸23b′,23b′の両端にはそれぞれ不平衡ロータ23c…23cが取り付けられた構成とされている。両回転軸23b′,23b′に取り付けられた不平衡ロータ23c…23cは、半円形に形成されたウエイト部23c′…23c′が互いに対称的に位置するように構成されている。このような構成において、加振機23の加振周波数は、ステッピングモータ23b,23bの回転数によって調整することができる一方、加振力は、ウエイト部23c′…23c′の重量や形状を変えることで調整することができる。
【0038】
そして、前記固定部材10の各支持部13…13の上部と前記可動ユニット20のプレート部材22a,22aの搬送方向A両端部の下部とがそれぞれ引張バネ30…30で接続され、これによって、可動ユニット20は、機台3に固定された支持部材10に弾性的に吊り下げられる構造となっている。
【0039】
以上のような振動式フィーダ1の構造によって、加振機23で発生された加振力をトラフ21上に積載された物品に与え、物品を搬送方向Aに搬送することができる。すなわち、加振機23は、各ステッピングモータ23b,23bの回転軸23b′,23b′が互いに逆方向(図3の矢印B,C参照)に同速度で回転するように制御され、これによって加振機23は、該加振機23の角度に応じて、搬送方向Aに対する上下方向に傾斜させた方向を加振方向とする加振力を発生させる。なお、搬送幅方向への加振力は、対称的に配置された不平衡ロータ23c…23cの構造上相殺されることになる。そして、加振機23で発生した加振力は、該加振機23が固定された支点軸24、そして軸受22a′,22a′を介して該支点軸24を支持するフレーム22、さらに該フレーム22に固定されたトラフ21に伝達され、可動ユニット20全体を振動させてトラフ21上の物品に搬送のための加振力を与えることになる。このとき、支点軸24の軸心が可動ユニット20の重心を通るように構成したので、加振機23の加振方向を可動ユニット20全体の振動方向と一致させることができると共にトラフ面21aの各部の加振方向をその方向に統一させることができる。
【0040】
このように、フレーム22に回動可能に支持された加振機23の角度に応じてトラフ面21aの加振方向が決定されるので、加振機23を回動させて角度を変更するだけでトラフ面21aの加振方向を任意に変更することができ、加振方向の変更作業の大幅な容易化が実現される。
【0041】
一方、このような不平衡ロータ23c…23cを用いた加振機23は、従来の板バネを用いたフィーダのように共振周波数を利用したものではなく、共振周波数から離れた周波数で強制的に可動ユニット20を振動させることができるので、ステッピングモータ23b,23bを停止させたときには速やかにトラフ面21aの振動が停止し、物品停止性能が向上することになる。
【0042】
また、回転軸23b′,23b′が支点軸24上に並んで該支点軸24と直交する方向に位置するようにステッピングモータ23b,23bを配置したので、それぞれの回転軸23b′,23b′に取り付けられた不平衡ロータ23c…23cが水平面内に並んで位置することになり、その結果、加振機23の高さを抑えることができ、振動式フィーダ1の垂直面内でのコンパクト化を実現することができる。
【0043】
また、通常の物品搬送状態においては、図6(a)に示すように、レバー部材25を図例の角度に設定することにより、加振方向Dは搬送方向Aに対して上方に傾斜させた方向に設定され、可動ユニット20の振動に際して、物品Xに加振力を与えるときには物品Xを加振方向Dに跳ね上げて物品Xを搬送する。一方、物品Xの搬送を停止させるときであって、ステッピングモータ23b,23bを停止させる以上の物品停止性能が要求される場合は、図6(b)に示すように、レバー部材25を図例の角度に設定することにより、加振方向D′は反搬送方向A′に対して上方に傾斜させた方向に設定される。このように加振方向を反転させたときには、図7に示すように、物品Xには反搬送方向A′の加振力が加えられ、慣性で搬送方向Aに進む物品Xを強制的に停止させることができる。そして、物品Xが搬送される方向が搬送方向Aから反搬送方向A′に反転するタイミングで、前記ステッピングモータ23b,23bを停止させることにより、物品Xが停止することになる。なお、最も物品搬送速度が大きくなる加振方向Dが搬送方向Aに対して角度α上方に傾斜させたものであるときには、物品Xの搬送を停止させる場合には反搬送方向A′に対して角度α上方に傾斜させるように加振方向Dを反転させることによって、物品Xに対して最も大きな反搬送方向A′の強制力が働き、物品Xの搬送を最も迅速に停止させることができる。
【0044】
なお、加振機23は、両回転軸23b′,23b′を回転させるためにそれぞれに独立のステッピングモータ23b,23bを備え、これによって両回転軸23b′,23b′の回転数をより緻密に制御できる構造としているが、1つのモータでギア又はベルト等を介して両回転軸23b′,23b′を逆位相になるよう回転させる構造にして、機構の簡素化を図るようにしてもよい。また、支点軸24の軸心から可動ユニット20の重心を敢えてずらすことで、トラフ面21a各部における加振方向に変化をつけることも可能である。さらに、加振機23を支点軸24に固定して、支点軸24を回動させることにより加振機23の角度を変更できる構造としたが、支点軸24をフレーム22に対して固定とし、支点軸24に対して加振機23が回動可能に支持されている構造としてもよい。そして、これらは以下に説明する本発明の第2、第3の実施の形態においても同様である。
【0045】
次に、本発明の第2の実施の形態について説明する。
【0046】
図8に示す振動式フィーダ101は、加振機123が固定された支点軸124の一端部にサーボモータ140が取り付けられいると共に、このサーボモータ140と不平衡ロータ123c…123cを回転させるステッピングモータ123b,123bとを制御するコントローラ141と、トラフ121上に積載された物品を識別する画像認識装置142とを備えている。前記サーボモータ140は、コントローラ141からの制御信号により支点軸124を任意の角度に回動させ、その角度を維持することができる。一方、前記画像認識装置142は、例えばCCDカメラによりトラフ121上の物品の画像を取得し、物品の大きさ、形状、色彩等に基いて物品を識別するものである。
【0047】
また、前記コントローラ141には、メモリ141aが内蔵され、このメモリ141aには物品毎の最適な加振方向等のデータを有する商品マスタ150(図11参照)が格納されている。そして、前記コントローラ141は、前記画像認識装置142により識別された物品の種類に応じて、前記メモリ141aから該当する物品のデータを読み出して、前記サーボモータ140を制御する。なお、商品マスタ150には、ステッピングモータ123b,123bの回転数のデータを格納して、物品ごとに加振周波数を変化させるようにすることもできる。
【0048】
ここで、前記商品マスタ150における加振方向のデータとは、例えば以下のようにして生成される、まず、図9に示すような、単重平均及び見掛密度が異なる商品X1〜X4があり、それぞれについて搬送方向Aに対する上方への傾斜角度を0〜60°間で10°毎に加振方向を変化させて設定し、それぞれの加振方向で物品を搬送したときの平均搬送量Ave.と標準偏差S.D.を測定し、図10に示すような結果が得られた。このとき、商品X1〜X4に応じて、平均搬送量Ave.が最大、つまり物品搬送速度が最大となる加振方向、及び標準偏差S.D.が最小、つまり物品のバラツキが最小となる加振方向が異なるので、メモリ141aに格納された商品マスタ150は図11に示すように、搬送速度増大モード、バラツキ低減モード、そして搬送速度増大とバラツキ低減とを両立させる両立モードに対応する3種類の加振方向のデータを用意して、状況に応じて予め作業者によりモードを指定し、指定されたモードに対応した数値を読み出すようになっている。また、物品搬送時間及び物品停止時間を設定して、物品搬送時には通常の加振方向で物品搬送を行い(図6(a)の搬送状態)、物品停止時には加振方向を反転させると共に物品停止後にステッピングモータ123b,123bを停止させる(図6(b)の搬送状態)ようにプログラムし、これを繰り返すことで、短時間の物品の搬送・停止を繰り返す高速断続運転モード、比較的少量の物品を搬送する少量搬送モード、搬送する物品の個数を制御する個数搬送モード等の搬送モードを実現するようにすることもできる。
【0049】
なお、前記サーボモータ140は、支点軸124の軸心上に重心が位置するように配置され、これを取り付けたことによって可動ユニット120の重心が支点軸124の軸心からずれないようになっている。また、支点軸124を回動させるアクチュエータは、サーボモータ140に限らず、ステッピングモータ、エアシリンダ、又はソレノイド等であってもよい。
【0050】
このように、この実施形態においては、加振方向の変更をサーボモータ140で機械的に行うことによって、加振方向の変更作業の自動化及び高速化が実現されると共に、振動式フィーダ1の動作中でも加振方向の変更作業を行うことができる。さらに、画像認識装置142により識別した物品のデータをコントローラ141のメモリ141aに格納された商品マスタ150から読み出してサーボモータ140を制御することによって一層の自動化及び高速化が実現される。
【0051】
また、サーボモータ140により瞬時に加振方向の変更を実現することができるので、高速断続運転時、少量搬送時、及び個数搬送時等を行う場合も良好な搬送状態が得られることになる。
【0052】
次に、本発明の第3の実施の形態について説明する。
【0053】
図12に示すように、振動式フィーダ201に備えられた加振機223は、支点軸224の両側に回転軸223b′,223b′が平行になるよう各ステッピングモータ223b,223bが配置された構造である。そして、各回転軸223b′,223b′を逆方向(矢印E,F参照)で同じ回転数で回転させることによって、加振機223は、前記第1の実施の形態の構成と同様に搬送方向Aに対する上下方向に傾斜させた方向を加振方向Gとすることができる。さらに、支点軸224を回動させることによって加振方向Gを変更することができる。
【0054】
このように、回転軸223b′,223b′が支点軸224の両側に該支点軸224に対して平行になるように構成したので、不平衡ロータ223c…223cが同一垂直面内に位置することになるので、加振機223の幅を抑えることができ、振動式フィーダ201の水平面内でのコンパクト化を実現することができる。
【産業上の利用可能性】
【0055】
本発明は、トラフ面の加振方向を容易に変更することができると共に物品停止性能を向上した振動式フィーダを提供する。本発明は、所定の振動を加えることによって、トラフに積載された物品を効率的に搬送することができる振動式フィーダに関し、物品搬送の技術分野に広く好適である。
【図面の簡単な説明】
【0056】
【図1】本発明の実施の形態に係る振動式フィーダを備えた組み合わせ計量装置の正面である。
【図2】同振動式フィーダの正面図である。
【図3】同振動式フィーダの一部切欠き平面図である。
【図4】同振動式フィーダの一部切欠き正面図である。
【図5】同振動式フィーダの一部切欠き側面図である。
【図6】加振方向に応じた物品の搬送状態を示す説明図である。
【図7】トラフの振幅の時間的変化と物品の搬送停止との関係を示すグラフである。
【図8】本発明の第2の実施の形態に係る振動式フィーダの平面図である。
【図9】搬送対象とした商品の特性を示す表である
【図10】加振方向に対する平均搬送量と標準偏差とを示す図である。
【図11】コントローラのメモリに格納される商品マスタの例である。
【図12】本発明の第3の実施の形態に係る振動式フィーダの正面図である。
【図13】従来の板バネを用いた振動式フィーダにおけるトラフの振幅の時間的変化と物品の搬送停止との関係を示すグラフである。
【符号の説明】
【0057】
1 振動式フィーダ
20 可動ユニット
21 トラフ
22 フレーム
23 加振機
23b ステッピングモータ(駆動源)
23b′ 回転軸
23c 不平衡ロータ
24 支点軸
140 サーボモータ(アクチュエータ)
141 コントローラ(制御手段、読出手段)
141a メモリ(記憶手段)
142 画像認識装置(識別手段)
【特許請求の範囲】
【請求項1】
トラフの物品搬送方向に対して斜め上方方向に加振力を与えて、トラフ上の物品を搬送する振動式フィーダであって、前記トラフと、該トラフを支持するフレームと、該フレームに支持された加振機とを有する可動ユニットが備えられ、該可動ユニットが固定部材に対して弾性支持されていると共に、前記加振機は、平行に配置された一対の回転軸と、両回転軸に互いに対称的に取り付けられた不平衡ロータと、それらを対称状態を維持して逆方向に回転させる駆動源とを有し、前記不平衡ロータの回転により前記加振力を発生させるように構成され、かつ、該加振機は、前記フレームに、物品搬送方向に対して水平方向に直交する支点軸を介して回動可能に支持されていることを特徴とする振動式フィーダ。
【請求項2】
一対の回転軸は、支点軸上に並んで該支点軸と直交する方向に配置されていることを特徴とする請求項1に記載の振動式フィーダ。
【請求項3】
一対の回転軸は、支点軸の両側に該支点軸に対して平行に配置されていることを特徴とする請求項1に記載の振動式フィーダ。
【請求項4】
支点軸は、その軸心が可動ユニットの重心位置を通ることを特徴とする請求項1から請求項3のいずれかに記載の振動式フィーダ。
【請求項5】
加振機を回動させるアクチュエータと、該アクチュエータの作動を制御する制御手段とが備えられていることを特徴とする請求項1から請求項4のいずれかに記載の振動式フィーダ。
【請求項6】
アクチュエータは、その重心が支点軸の軸心上に位置するように配置されていることを特徴とする請求項5に記載の振動式フィーダ。
【請求項7】
各物品ごとに加振方向を記憶する記憶手段と、物品を識別する識別手段と、該識別手段により識別された物品の加振方向を前記記憶手段から読み出す読出手段とが備えられ、制御手段は、前記読出手段で読み出した加振方向を実現するようにアクチュエータを制御することを特徴とする請求項5または請求項6に記載の振動式フィーダ。
【請求項8】
制御手段は、物品の搬送を停止させるときは、加振方向が反物品搬送方向に対して斜め上方方向になるようにアクチュエータを制御することを特徴とする請求項5から請求項7のいずれかに記載の振動式フィーダ。
【請求項1】
トラフの物品搬送方向に対して斜め上方方向に加振力を与えて、トラフ上の物品を搬送する振動式フィーダであって、前記トラフと、該トラフを支持するフレームと、該フレームに支持された加振機とを有する可動ユニットが備えられ、該可動ユニットが固定部材に対して弾性支持されていると共に、前記加振機は、平行に配置された一対の回転軸と、両回転軸に互いに対称的に取り付けられた不平衡ロータと、それらを対称状態を維持して逆方向に回転させる駆動源とを有し、前記不平衡ロータの回転により前記加振力を発生させるように構成され、かつ、該加振機は、前記フレームに、物品搬送方向に対して水平方向に直交する支点軸を介して回動可能に支持されていることを特徴とする振動式フィーダ。
【請求項2】
一対の回転軸は、支点軸上に並んで該支点軸と直交する方向に配置されていることを特徴とする請求項1に記載の振動式フィーダ。
【請求項3】
一対の回転軸は、支点軸の両側に該支点軸に対して平行に配置されていることを特徴とする請求項1に記載の振動式フィーダ。
【請求項4】
支点軸は、その軸心が可動ユニットの重心位置を通ることを特徴とする請求項1から請求項3のいずれかに記載の振動式フィーダ。
【請求項5】
加振機を回動させるアクチュエータと、該アクチュエータの作動を制御する制御手段とが備えられていることを特徴とする請求項1から請求項4のいずれかに記載の振動式フィーダ。
【請求項6】
アクチュエータは、その重心が支点軸の軸心上に位置するように配置されていることを特徴とする請求項5に記載の振動式フィーダ。
【請求項7】
各物品ごとに加振方向を記憶する記憶手段と、物品を識別する識別手段と、該識別手段により識別された物品の加振方向を前記記憶手段から読み出す読出手段とが備えられ、制御手段は、前記読出手段で読み出した加振方向を実現するようにアクチュエータを制御することを特徴とする請求項5または請求項6に記載の振動式フィーダ。
【請求項8】
制御手段は、物品の搬送を停止させるときは、加振方向が反物品搬送方向に対して斜め上方方向になるようにアクチュエータを制御することを特徴とする請求項5から請求項7のいずれかに記載の振動式フィーダ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−52034(P2006−52034A)
【公開日】平成18年2月23日(2006.2.23)
【国際特許分類】
【出願番号】特願2004−233324(P2004−233324)
【出願日】平成16年8月10日(2004.8.10)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成18年2月23日(2006.2.23)
【国際特許分類】
【出願日】平成16年8月10日(2004.8.10)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]