
振動測定及び回転機械の診断の機器及び方法
【課題】以前の測定履歴に基づかないで回転機械状態を診断するユーザ・インタフェース・システム及び方法を提供する。
【解決手段】振動データ収集及び回転機械障害診断機器は、機械設定エンジン110、測定エンジン120、診断エンジン150、測定ユーザ・インタフェース122、機械設定ユーザ・インタフェース112及び診断ユーザ・インタフェース152を含む。機械設定エンジンは、機械設定ユーザ・インタフェースを介して機械に関するパラメータを要求し受ける。測定エンジンは、測定ユーザ・インタフェースを介してセンサ配置場所を要求し受け、測定した場所と測定する必要が依然ある場所の追跡を維持する。診断エンジンは、機械障害を診断し、直感的図形重大度スケールを用いて診断ユーザ・インタフェースによりユーザに情報を示す。
【解決手段】振動データ収集及び回転機械障害診断機器は、機械設定エンジン110、測定エンジン120、診断エンジン150、測定ユーザ・インタフェース122、機械設定ユーザ・インタフェース112及び診断ユーザ・インタフェース152を含む。機械設定エンジンは、機械設定ユーザ・インタフェースを介して機械に関するパラメータを要求し受ける。測定エンジンは、測定ユーザ・インタフェースを介してセンサ配置場所を要求し受け、測定した場所と測定する必要が依然ある場所の追跡を維持する。診断エンジンは、機械障害を診断し、直感的図形重大度スケールを用いて診断ユーザ・インタフェースによりユーザに情報を示す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、回転機械の振動測定及び機械障害の診断に関する。
【背景技術】
【0002】
電気モータ、ファン、タービン、他の機械又はこれらの組合せの如き全ての形式の回転装置にて振動が生じる。振動は、その装置の一定動作の特性である。しかし、アンバランス、調整ミス、ベアリング摩耗、緩み及び偏心シャフトの如き機械状態により、装置を故障させる振動が生じる。振動波形を測定する加速度計の如きセンサを用いて、振動を測定できる。加速度計に関連して、振動分析器を用いて、存在する振動に関する頻度及び大きさの情報を得ることができる。この情報を用いて、故障前の障害を診断できる。
【0003】
従来、装置の状況を判断して、装置の障害と差し迫った装置の故障とを診断するには、振動データ収集及び分析に関する広範なトレーニングと経験が要求された。特定システムの以前の測定履歴から確立した予測保守データベースも従来用いて、回転機械状態を判断し、障害を診断した。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−285838号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、以前の測定履歴に基づかない回転機械状態を診断するユーザ・インタフェース・システム及び方法を提供する。
【課題を解決するための手段】
【0006】
本発明の概念は、次の通りである。
1.振動を測定し回転機械の障害を診断する機器であって;機械に関するパラメータを要求しユーザから受けるように構成された機械設定エンジンと;上記機械に関連する振動センサの配置及び方向の情報を要求し受けて、センサ測定が完了した場所を追跡するように構成された測定エンジンと;上記振動センサからのデータを受けるように構成されたデータ取込みエンジンと;該データ取込みエンジンからのデータを受け、規定設定を上記データに適用して(1)機械障害を診断し、(2)上記機械障害の重大度を判断するように構成された診断エンジンと;上記測定エンジン及び上記診断エンジンに結合され、(1)上記機械に関連する上記センサの場所及び方向、(2)上記ユーザに特定され上記センサで測定が行われた場所、及び(3)上記ユーザに特定され上記線による測定を行うことが依然必要な場所の少なくとも1つを示すように構成された測定ユーザ・インタフェースとを具え;上記診断エンジンが、以前に行った振動測定モニタ・データではなく、上記センサにより上記データ取込みエンジンに供給されたデータと上記機械に関する上記パラメータとに基づいて上記機械の障害を診断する機器。
2.上記データ取込みモジュールは、上記機械に結合されたタコメータから直接、シャフト速度を測定するように更に構成された概念1の機器。
3.上記センサは、3軸加速度計を具える概念1の機器。
4.上記センサは、単一軸加速度計を具える概念1の機器。
5.上記測定ユーザ・インタフェースが重大度スケールを示すように構成され、上記重大度スケール上に配置された重大度指示器が各診断済み機械障害の重大度のレベルを指示するように構成された概念1の機器。
6.上記重大度のレベルの文字説明を更に具える概念5の機器。
7.上記重大度スケールは、複数の重大度カテゴリに分割された連続スケールであり、各重大度カテゴリが色コード化された概念5の機器。
8.上記重大度スケールの緑色コードが軽微な問題を示し、上記重大度スケールの黄色コードが中位の問題を示し、上記重大度スケールのオレンジ色コードが重要な問題を示し、上記重大度スケールの赤色コードが極度の問題を示す概念7の機器。
9.上記わずかな重大度カテゴリは、保守行為を推奨せず、上記機械を再試験すべきで、定期保守の後に上記機械の状態をモニタすることを意味し;上記中位の重大度カテゴリは、数ヶ月までに又は1年までに保守行為を受けて、後で、測定の頻度を増やし、上記機械の状態をモニタするように推奨することを意味し;上記重要な重大度カテゴリは、次の数週間内の保守行為を推奨し、次の計画した休止時間又は保守期間中に保守行為を実行すべき事を推奨し;上記極度な重大度カテゴリは、直ちに保守行為が必要で、上記機械を停止すべきで、システムの故障を避けるために直ちに修理行為を受けるべきであることを意味する概念7の機器。
10.上記センサからの時間領域振動センサ・データを周波数領域データに変換するように構成されたデジタル信号プロセッサを更に具える概念1の機器。
11.上記機械設定エンジンは、ギア・パラメータを要求し受けるように構成された機械設定ユーザ・インタフェースを具える概念1の機器。
12.上記機械設定ユーザ・インタフェースは、シャフト速度、ギア比及びギア歯計数の少なくとも1つを要求し受けるように構成された概念11の機器。
13.上記機械設定ユーザ・インタフェースは、上記ギアに用いるベアリングの形式を要求し受けるように構成された概念11の機器。
14.上記機械設定ユーザ・インタフェースは、上記ギアに用いる変速機の数を要求し受けるように構成された概念11の機器。
15.ギアボックスの障害を診断する方法であって;シャフト速度、ギア比又はギア歯計数を含む上記ギアボックスの少なくとも1つのパラメータに関する情報を要求し;ユーザがシャフト速度を選択すると、上記ギアボックスの入力シャフト速度及び出力シャフト速度を受け;上記ユーザがギア比を選択すると、上記ギアボックスの上記入力及び上記出力の間のギア比を受け;上記ユーザがギア歯計数を選択すると、上記ギアボックスの入力ギア及び出力ギアのギア歯計数を受ける方法。
16.更に、上記ギアボックスに用いるベアリングの形式に関する情報を要求し;上記ギアボックスに用いるベアリングの形式に関する情報を受ける概念15の方法。
17.更に、上記ギアボックスに用いる変速機の数に関する情報を要求し;上記ギアボックスに用いる変速機の数に関する情報を受ける概念15の方法。
18.更に、上記ギアボックスとのたわみ継ぎ手に関する情報を要求し;上記たわみ継ぎ手に関する情報を受ける概念15の方法。
19.回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法であって;上記回転機械の構成要素に関するパラメータを受け;選択した信号測定場所を受け;上記センサにより振動測定を行い;以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転装置の障害を診断する方法。
20.上記センサが3軸加速度計である概念19の方法。
21.更に、センサ方向を表示し;選択したセンサの方向を受ける概念19の方法。
22.回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法の命令を実行するコンピュータ読み出し可能な媒体であって;上記方法が;上記回転機械の構成要素のパラメータを受け;選択された振動測定場所を受け;上記回転機械の図形モデルにセンサ場所のオプションを表示し;選択されたセンサ場所を受け;上記センサにより振動測定を行い;上記回転機械の図形モデルに上記選択された振動測定場所での振動測定を表示し;以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転機械の障害を診断する媒体。
【0007】
振動テスタと機械障害診断機器及び方法の例を図により示す。これら例及び図は、限定のためではなく説明のためである。
【図面の簡単な説明】
【0008】
【図1】図1は、本発明の実施例による振動データ収集及び機械診断機器の例を示すブロック図である。
【図2】図2は、本発明の実施例により、振動テスタ及び機械障害診断機器がシステム設定パラメータを促し受ける処理例を示す流れ図である。
【図3A】図3Aは、本発明の実施例により、システム設定パラメータを促し受ける質問及び見本応答を示す。
【図3B】図3Bは、本発明の実施例により、システム設定パラメータを促し受ける質問及び見本応答を示す。
【図3C】図3Cは、本発明の実施例により、システム設定パラメータを促し受ける質問及び見本応答を示す。
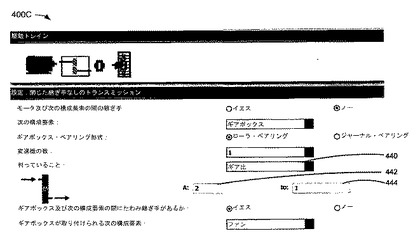
【図4A】図4Aは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図4B】図4Bは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図4C】図4Cは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図4D】図4Dは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図5】図5は、本発明の実施例により、振動テスタ及び機械障害診断機器がセンサ測定を促し受ける処理例を示す流れ図である。
【図6A】図6Aは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6B】図6Bは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6C】図6Cは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6D】図6Dは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6E】図6Eは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6F】図6Fは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6G】図6Gは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図7A】図7Aは、本発明の実施例により、機械障害の機器診断をユーザに示す図的方法として用いる重大度スケールを示す。
【図7B】図7Bは、本発明の実施例により、機械障害の診断をユーザに示すスクリーン・ショットの例を示す。
【発明を実施するための形態】
【0009】
以下の説明及び図は、説明のためであり、限定を意図するものではない。本発明を完全に理解できるようにするために多くの特定の詳細を述べる。しかし、特定の場合において、説明が不明瞭になるのを避けるために、周知又は従来の詳細については、説明しない。
【0010】
本発明の範囲を更に制限することを意図せずに、本発明の実施例による機器、装置、方法及びこれらの関連結果の例を以下に示す。本明細書で「一実施例」又は「ある実施例」と言及することは、実施例に関連して説明する特定の特徴、構造、又は特性が本発明の少なくとも1つの実施例に含まれることを意味する。明細書の種々の部分での「一実施例において」の句が現れるが、同じ実施例の全てを必然的に言及するものでもなく、相互に他の実施例を排除した別の又は代わりの実施例でもない。さらに、種々の特徴を説明するが、これらはいくつかの実施例で示されるものであり、他の実施例には示されないかもしれない。同様に、種々の条件について説明するが、これらは、いくつかの実施例の条件で他の実施例のものではないかもしれない。
【0011】
本明細書で用いる用語は、本技術において、本発明の文脈内で、各用語を用いる特定の文脈内で、一般的に本来の意味である。本発明を説明するのに用いるある用語を以下、即ち、明細書で説明して、本発明の説明に関する実務家に追加のガイドを与える。ここで説明するいくつかの用語の例を含む本明細書での例の用途は、単に説明のためであり、本発明又は任意の例示の用語の範囲及び意味を更に限定するものではない。同様に、本発明は、本明細書に示す種々の実施例に限定されない。
【0012】
以下の説明で用いる専門用語は、本発明のある特定例の詳細説明に関連して用いるが、その広範で合理的な方法にて解釈することを意図する。ある用語を以下に強調するが、任意の限定された方法で解釈されることを意図したある専門用語は、この詳細な説明の欄にて明白で限定的に定義される。
【0013】
回転装置から振動データを収集し、機械的障害用の振動信号を分析する機器を以下に説明する。この機器は、振動データ収集及び分析に未経験の初心者ユーザが構成したり利用したりすることができる。この機器は、簡略化した方法を促進し、非履歴に基づくしきい値、診断エンジン、3軸センサ方向及びコンテキスト感応ヘルプを用いて、推奨修理行為及び振動スペクトル付きの診断結果を出す。この機器により、ユーザは、回転装置の状態を迅速且つ容易に判断できる。ユーザには、振動分析の従来のトレーニング又は経験が要求されず、機械的障害を診断する機器を用いるために回転装置に対して予測保守データベースを確立する必要もない。
【0014】
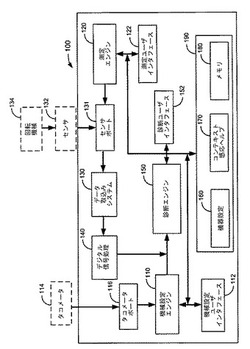
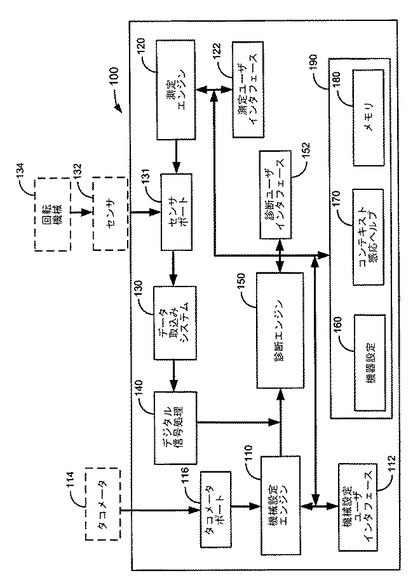
図1は、本発明の実施例による振動テスタ及び機械診断機器100の例を示すブロック図である。機器100は、機械設定エンジン110、設定ユーザ・インタフェース112、測定エンジン120、測定ユーザ・インタフェース122、データ取込みシステム130、デジタル信号プロセッサ140、診断エンジン150及び診断ユーザ・インタフェース152を含む。機器100は、機器設定エンジン160、コンテキスト感応ヘルプ・データベース170及び1つ以上のメモリ・ユニット180も含む。
【0015】
機械障害状態を診断するのに機器100を用いることは、(1)被試験機械システムの設定と、(2)被試験システムの測定と、(3)被試験システムの診断とを含むことができる。機器100は、容易に理解できる方法をユーザに提供する。
【0016】
機械設定エンジン110を機械設定ユーザ・インタフェース112に結合できる。機械設定エンジン110は、ユーザが答える1組の質問を発生して、被診断装置の構成要素に関する充分な情報と、これら構成要素のパラメータを提供できる。機器100が要求できるパラメータの例には、これらに限定されるものではないが、モータ形式、速度、馬力、ベアリング形式、駆動構成要素への結合方法が含まれる。駆動した構成要素を特定する形式及び他のパラメータも要求してもよい。生じた質問を、機械設定ユーザ・インタフェース112を介してユーザに示すことができ、この機械設定ユーザ・インタフェース112は、ユーザが質問に応答するための回答選択又は余白を提供する。生じた質問の形式及び典型的なユーザ応答の非限定的な例を図3A〜3Cに示す。振動テスタ及び分析器を使用する充分な経験を期待できないユーザが機器100を用いることを意図するので、質問は、技能者が典型的には被診断システムの基本的な知識、又は被試験機械のラベル又はネームプレートから判る情報に基づいて答えられる直接的な質問である。ユーザが機械設定エンジン110に提供できる情報が増えると、診断信頼性の結果レベルが高くなる。機械設定エンジン110との典型的な対話を以下に説明する。
【0017】
機械設定エンジン110は、回転機械の関連部分の動作速度の手動入力を受け入れることができる。代わりに、機器100は、タコメータ114からのデータを受け入れることができるタコメータ入力ポート116を有する。タコメータ114をユーザが設定して、回転機械における駆動シャフトの回転速度をモニタできる。タコメータは、可変負荷状態での可変周波数駆動の動作速度を決定するのに特に有用である。タコメータ・パルスを発生できる多くの方法がある。例えば、反射テープを被モニタ装置の回転駆動シャフトの配置できる。光学トランスジューサは、光源からの光を伝送して、反射テープからの伝送光の反射を検出できる。回転駆動シャフトの各回転が1つのタコメータ・パルスを発生する。一実施例において、タコメータ114は、レーザ・タコメータを含んでいる。動作速度をモニタするタコメータとして用いることができるトランスジューサの他の例は、駆動シャフトに取り付けたエンコード・ディスクである。このエンコード・ディスクは、光電トランスジューサの間の光学ビームを遮って、タコメータ・パルスを発生する。
【0018】
測定エンジン120を測定ユーザ・インタフェース122に結合できる。測定エンジン120は、マシン設定エンジン110が受けた回答に基づいて1組の質問を発生できる。被診断システムの図的記述を測定エンジン120が提供でき、測定ユーザ・インタフェース122を介してユーザに示すことができる。例えば、被診断システムの駆動構成要素の形式及び駆動モータのパワーに基づいて、測定エンジン120は、振動データを収集できるシステム内の機械ハウジングに機械的に結合された回転構成要素の他の形式の場所又はベアリング場所を識別する。ユーザは、振動測定を行うセンサ場所としての測定ユーザ・インタフェース122を介して、これら場所の数までで、全てを含んで選択できる。構成要素につき少なくとも1つの振動測定を行うことにより、充分な振動情報を機器100が診断用に利用できる。さらに、ユーザが選択場所の各々にセンサを配置すると、振動データを得る場所の順序、被測定構成要素に対するセンサの場所、被測定構成要素のシャフトに対するセンサの方向などに関する情報をユーザは入力できる。発生する質問及び典型的なユーザの応答の形式の例を図4A〜4Dに示すが、それらに限定するものではない。ユーザがシステム内のユーザ選択振動測定場所の各々に対してセンサを設定するので、測定エンジン120は、関連情報をユーザに促す。機械設定エンジン110の典型的な対話を以下に説明する。
【0019】
機器100は、単一軸又は3軸加速度計の如きセンサ132からのデータを取り込むセンサ入力ポート131を含む。センサ132は、回転機械システム134からの振動を測定する。センサ132が記録した振動データは、機器100のセンサ・ポート131を介して、データ取込みシステム130に送ることができる。記録された振動データは、時間領域で採られる。次に、データ取り込みシステム130は、時間領域データをデジタル信号プロセッサ140に送り、デジタル信号プロセッサ140は、時間領域データを周波数領域スペクトラム・データに変換する。次に、種々のフィルタを用いて、周波数領域スペクトラム・データの結果が処理される。
【0020】
診断エンジン150を診断ユーザ・インタフェース152に結合する。一実施例において、診断エンジン150は、周波数領域データを、メモリに蓄積された規定設定と比較して、機械障害の診断及び保守の推奨を行う。各測定場所での機械障害の見積った重大度の図的表示を振動エンジン150が与え、診断ユーザ・インタフェース152を介してユーザに示される。簡潔な文字記述を図的重大度スケール表示と共に提供する。診断エンジン150との典型的な対話を後述する。
【0021】
また、機器100は、機器設定エンジン160と、コンテキスト感応ヘルプ・データベース170と、1つ以上のメモリ・ユニット180を有するシステム・リソース・ブロック190も含んでいる。機器設定エンジン160により、ユーザは、機器の自己試験を実行でき、データ及び時間の如き機器設定にアクセスでき、又はメモリ機能をクリアできる。コンテキスト感応ヘルプ・データベース170は、被試験システムの設定に関してユーザにしばしば尋ねる質問の答え、センサによる振動測定、診断結果、用語解説、又は機器による問題解決のためのヒントを提供できる。メモリ・ユニット180は、それらに限定するものではないが、RAM、ROM、揮発性及び不揮発性メモリの任意の組合せを含むことができる。機器設定エンジン160,コンテキスト感応ヘルプ・データベース170及び1つ以上のメモリ・ユニット180は、機械設定ユーザ・インタフェース112、測定ユーザ・インタフェース122及び診断ユーザ・インタフェース152を介してユーザとコミュニケーションができる。
【0022】
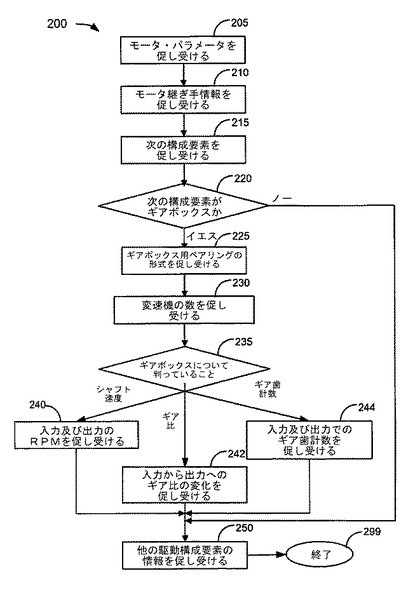
図2は、本発明の実施例により、機器100がシステム設定パラメータを促し受ける処理例を示す流れ図である。設定エンジン110が作る設定パラメータの質問を機械設定ユーザ・インタフェース112によりユーザに示すことができる。ブロック205にて、機器100は、被診断システムを駆動するモータを記述するユーザ・パラメータをユーザに促し、ユーザから受ける。典型的な対話における質問とユーザから得る応答との例を図3Aに示す。機器100により要求されるパラメータ310は、これらに限られないが、モータの形式(AC又はDC)、モータが可変周波数駆動(VFD)か否か、1分当たりの回転(RPM)でのモータの速度、馬力でのモータの公称パワー、モータが取り付けられた方向(水平又は垂直)、モータ・ベアリングの形式(ローラ又はジャーナル)、又は駆動とレンダリングからモータを外したかを含む。
【0023】
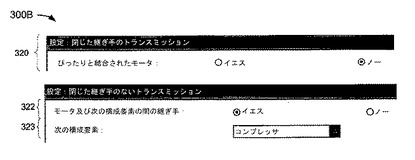
次にブロック210にて、機器100は、モータ用の継ぎ手情報をユーザに促しユーザから受ける。典型的な対話における質問とユーザから得る見本応答との例を図3Bに示す。例えば、セクション320にて、機器100は、モータがぴったりと結合したトランスミッションを含むかを質問し、セクション322にて、システム内のモータ及び次の構成要素の間に継ぎ手があるかを質問する。次にブロック215(図2)において、機器100は、次の構成要素についてユーザに質問する(必要に応じて)。
【0024】
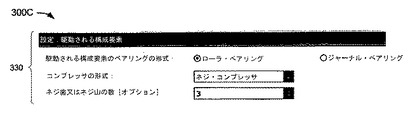
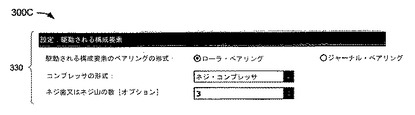
判断ブロック220にて、機器100は、モータが駆動する構成要素がギアボックス421かを判断する。構成要素がギアボックスでなければ(ブロック220がノー)、処理はブロック250に進み、機器100は、他の駆動構成要素の情報をユーザに促しユーザから得る。促した質問は、モータが駆動する構成要素の形式を特定してもよい。質問と、ネジ・コンプレッサについてユーザから得た見本応答330を図3Cに示す。処理は、ブロック299で終わる。
【0025】
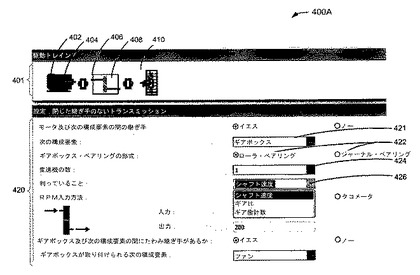
図4Aは、ファン410を駆動するギアボックス406に結合されたモータ402を具える駆動トレインの例401を示す。駆動トレイン401内の継ぎ手404及び408は、モータ402がギアボックス406に結合され、ギアボックスがファン410に結合されていることを夫々示す。ギアボックス406に関係する質問及び見本応答の例を図4Aのセクション420に示す。
【0026】
次の構成要素がギアボックス421ならば(ブロック220でイエス)、ブロック225にて、機器100は、ギアボックス421に用いるベアリング422の形式をユーザに促しユーザから受ける。次にブロック230にて、機器100は、ギアボックス421に用いる変速機424の数をユーザに促しユーザから受ける。次にブロック235にて、機器100は、図4Aに示す如き選択によるドロップ・ダウン・メニュー426を提供して、ギアボックスに関してユーザが判っていることを判断する。ギアボックスについて以下の情報の少なくとも1つの項目をユーザが提供できる。すなわち、シャフト速度427、ギア比428、又はギア歯計数429である。
【0027】
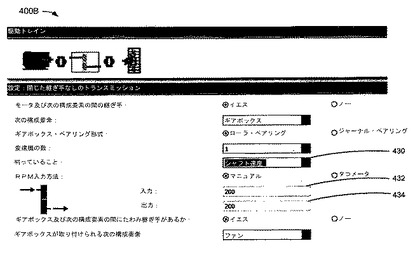
図4Bは、ギアボックス421のシャフト速度に関係する質問及び見本応答の例を示す。ユーザが既知のパラメータとしてシャフト速度430を選択すると、ブロック240にて、機器100は、ギアボックスの入力432とギアボックスの出力434にて、シャフト速度をユーザに促しユーザから受ける。この処理は、上述の如くブロック250に続く。
【0028】
図4Cは、ギアボックス421のギア比に関連する質問及び見本応答の例を示す。ユーザがギア比を既知のパラメータとして選択すると、ブロック242にて、機器100は、ギアボックスの入力442から出力444にギア比をユーザに促しユーザから受ける。処理は、上述の如く、ブロック250に続く。
【0029】
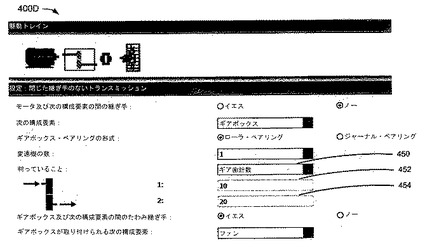
図4Dは、ギアボックス421のギア歯計数に関連する質問及び見本応答の例を示す。ユーザがギア歯計数450を既知のパラメータとして選択すると、機器100は、ギアボックスの入力ギア452及びギアボックスの出力ギア454でギア歯計数をユーザに促しユーザから受ける。処理は、上述の如く、ブロック250に続く。
【0030】
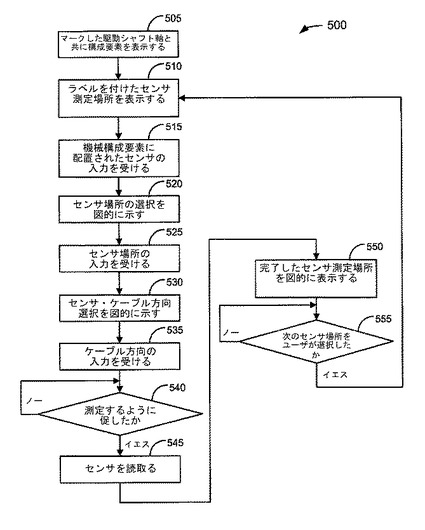
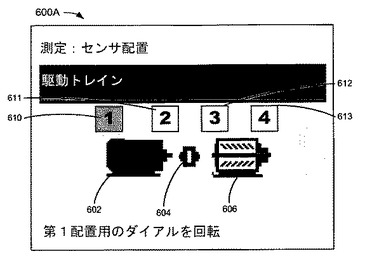
図5は、本発明の実施例により、振動テスタ及び機械障害診断機器100がセンサ測定を促し受ける処理の例500を示す流れ図である。ブロック505にて、機器100は、処理200での機械設定エンジン110との対話にてユーザが入力した被診断システムの構成要素を図的に表示する。構成要素の各々に基準のフレームとして駆動シャフト軸と共にマークを付けることができる。一実施例において、システム構成要素とは異なる色で駆動シャフト軸にマークを付けることができ、例えば、駆動シャフトを赤で示し、駆動トレインを黒で示すことができる。コンプレッサ606に結合されたモータ602を具えるシステムの図的構成要素表示の非限定の例を図6Aの例示のスクリーン・ショットに示す。
【0031】
ブロック510にて、機器100は、機械ハウジングに機械的に結合されたベアリング又は他の形式又は回転構成要素の場所を表示する。ユーザは、センサにより振動測定を行うためにシステム内のこれらの任意の場所を選択できる。特定の場所610、611、612及び613での機器100による振動データの測定を任意の特定順序で行えるが、典型的な測定は、駆動モータの自由端から順次開始し、駆動構成要素の駆動端にて終了する。むしろ、機器100は、後述のように、振動測定を既に行い被測定として残す場所の軌跡を維持することにより、測定順序を決める際にユーザに柔軟性を与えることができる。どの場所を既に測定し、どの場所を被測定として残すかに関する情報をユーザに判りやすいフォーマットで図的に提供できる。
【0032】
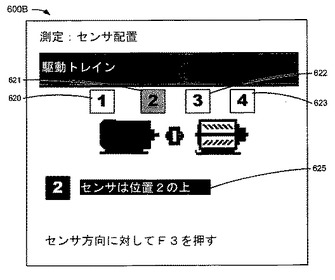
ブロック515にて、機器100は、機械構成要素のセンサ配置場所の入力を受ける。ユーザは、適切なセンサ場所が強調されるまで、機器100の入力ダイアルを回転させて、測定場所を選択できる。一実施例において、選択されたセンサ場所は、異なる色で、例えば、オレンジで強調される。図6Aの例において、駆動モータ602の自由端における第1センサ場所610は、ディフォルトにより機器100が強調する。例えば、測定用のセンサ場所を選択するために機器の入力ダイアルを回転するようにユーザが促される。図6Bの例において、センサ場所2と図の下のテキスト625を強調して示すように、第2センサ場所621をユーザが選択する。選択されずまだ測定されない残りのセンサ場所620、622及び623は強調されない。さらに、駆動トレイン及びセンサ場所の図の下で、機器100は、センサ測定用にユーザが行う選択に関するテキスト情報625を提供できる。例えば、機器100のファンクション・キーF3を押してセンサ方向情報を入力するようにユーザを促すこともできる。
【0033】
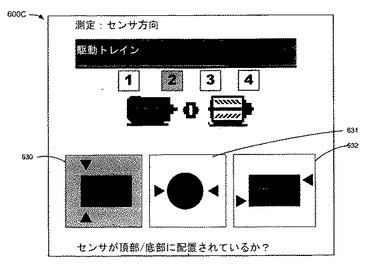
ブロック520にて、機器100は、機械構成要素に関するセンサの3つの可能な方向を図的に示す。3つのセンサの方向の例を図6Cに示す。(1)センサ630が構成要素の頂部又は底部に配置される。(2)センサ631が構成要素の側部に配置される。または(3)センサ632が構成要素の端部に配置される。次にブロック525にて、機器100は、特定のセンサに対するセンサ方向に関するユーザ入力を受ける。
【0034】
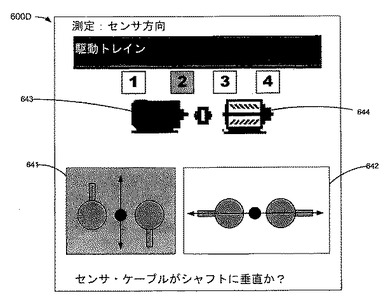
ブロック530にて、機器100は、センサ・ケーブル方向に対する2つの可能なシナリオを図的に示す。2つのセンサ・ケーブル方向の例を図6Dに示す。(1)センサ・ケーブル641は、駆動軸から離れている。または(2)センサ・ケーブル642は、駆動軸と交差している。次に、ブロック535にて、機器100は、特定のセンサ用のセンサ・ケーブル方向に関するユーザ入力を受ける。2008年11月26日に出願された米国特許出願第12/324682号は、3軸加速度計の方向を相関させるシステム及び方法を開示しており、ここではそのまま完全に参照文献として含ませる。
【0035】
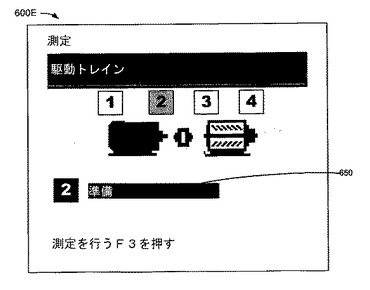
判断ブロック540にて、機器100は、ユーザが機器100に測定を行うように促したかを判断する。上述のように、ユーザが適切にセンサを設定し、センサ場所、センサ方向、及び/又は機器100に対するセンサ・ケーブルの方向を提供した後に、ユーザは、測定を行うように機器100を促す。図6Eは、スクリーン・ショットの一例を示し、テキスト650は、機器100がセンサ場所、センサ方向、場所2でのセンサ・ケーブルの方向を受け、機器100がセンサのデータを記録する準備ができたことを示す。機器によりセンサ振動測定を行うように、例えば、機器100のファンクション・キーF3を押すようにユーザを促すことができる。センサ入力にてセンサ情報を機器100に記録するようにユーザが機器100に命令しないと(ブロック540にてノー)、処理は判断ブロック540に残る。ユーザが測定を行うように機器100に命令すると、ブロック545にて、機器100は、機器へのセンサ入力ポート131でのセンサ情報を読取る。
【0036】
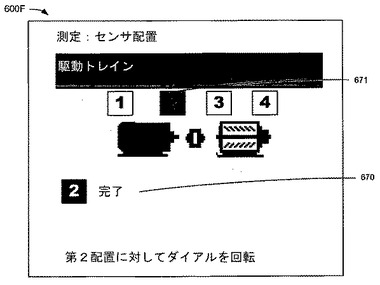
次にブロック550にて、機器100は、データが丁度記録されたセンサ場所を図的に表示する。スクリーン・ショットの例を図6Fに示す。センサ場所671を異なる色、例えば緑にて強調して、センサ場所2でのセンサ測定が完了したことを示すことができる。テキスト670も、場所2での測定が「完了」したことを示す。
【0037】
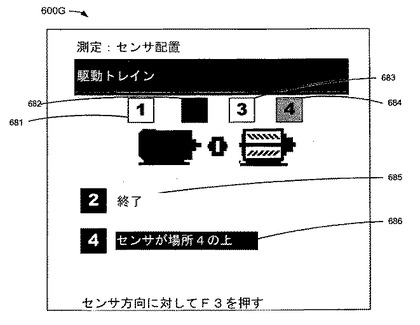
判断ブロック555にて、機器100は、被測定振動データ用の次のセンサ場所をユーザが選択したかを判断する。図6Gは、スクリーン・ショットの例を示し、次の被測定センサ場所としてセンサ場所4をユーザが強調している。図6Gにおいて、センサ場所2の682は、ある色、例えば緑で強調されて、測定が完了したことを示す。センサ4の684は、他の色、例えばオレンジで強調されて、これがアクティブな被測定センサ場所であることを示す。第1及び第3センサ場所681及び683は、測定されていないし、まだ被測定にも選択されていないので、非強調で残る。異なる色により、以前に測定した場所、現在測定中の場所、及び測定が残っている場所を追跡するのがユーザにとって容易である。更に、テキスト685は、センサ場所2が測定され、センサ場所4が測定するように選択されたアクティブな場所であることを示す。ユーザが次のセンサ場所を選択しないと(ブロック555でノー)、処理は判断ブロック555に残る。ユーザが次のセンサ場所を選択すると(ブロック555でイエス)、機器100はブロック510に戻り、機器100は、データがまだ得られていないセンサ測定場所を表示する。
【0038】
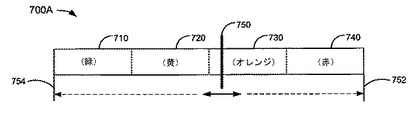
図7Aは、本発明の実施例により、機器100の診断をユーザに示す図的方法として用いる入内度スケール700Aを示す。重大度スケール700Aは、例えば、機器100での測定の時点での振動の強さに基づいてもよい。状態が変化すると、診断の重大度が変化し一様に現れて、例えば、被試験機械の注油の直後に改善する。しかし、時間と伴に、機械の連続動作により状態が次第に悪くなり、摩耗及び裂傷を受ける。故障の時間は、装置の形式、経年、機械負荷、環境条件、及び他の変数に応じて変化する。各重大度レベルを故障の特定時間に相関できないので、重大度スケールは、重大度の各レベルにおける機械故障を避けるための動作を単に推奨するだけである。
【0039】
図7Aに示すように、一実施例において、重大度スケール700Aを4レベルで作り、重大度におけるレベルが、スケールの左端754の最小重大度からスケールの右端752の最大重大度まで進む。しかし、重大度スケールは、任意の数のレベルで作ることができ、スケールを水平方向又は垂直方向に拡張できる。重大度レベルの例は、軽微710、中位720、重要730及び極度740を含んでもよい。各レベルは、コード化された色でよく、診断の重大度に関してユーザに直感の指示を与えることができる。よって、問題の最小重大度指示では、緑色コード710が「軽微」な重大度診断に対応し、黄色コード720が「中位」診断に対応し、オレンジ色コード730が「重要」診断に対応し、赤色コード740が「極度」診断に対応する。診断の重大度の指示は、スケールのスライダ750によりできる。スライダは、最小重大度754から最大重大度752までの全重大度スケールにわたって変化する。
【0040】
「軽微」診断では、保守行為が推奨されない。しかし、機械を再試験し、定期保守の後に状態をモニタすることが推奨される。「中位」診断では、月の単位で、その後、1年で均等になるように、保守行為を行うのが推奨される。測定の頻度を増やし、機械の状態をモニタすることも推奨される。「重要」診断では、次の数週間内に保守行為が推奨される。次の計画休止期間又は保守期間中に、保守行為を実行することも推奨される。「極度」診断では、保守行為が直ちに必要である。システム故障を避けるために、操作者は、機械を停止し、直ちに修理行為を行うことを考慮することも推奨される。
【0041】
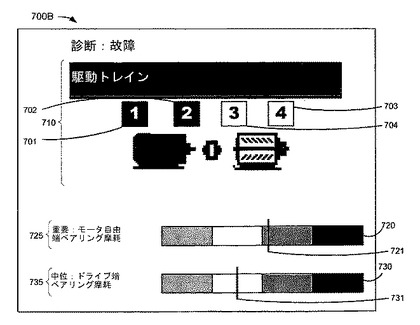
図7Bは、診断ユーザ・インタフェース152を用いて表示された診断エンジン150による診断の例を示す。駆動トレインの図形710は、センサ測定場所701、702、703及び704と共に、図7Bの上部に示される。第1及び第2センサ場所701及び702は、図的に強調されて、機械障害が診断された場所にユーザの注意を引く。強調されないセンサ場所703及び704は、これらの場所で機械障害が診断されていないことを示す。重大度スケール720及び730と、対応する簡潔な説明文725及び735とが、強調されたセンサ場所の各々の図形の下に示される。第1センサ場所701では、モータの自由端に対応して、重大度スケール720のスライダ721がオレンジ又は「重大」部類に配置されて、次の数週間以内の保守行為が推奨されることを示す。第2センサ場所702では、モータの駆動端に対応して、重大度スケール730のスライダ731が黄又は「中位」部類内に配置されて、測定の頻度を増やし、次の数ヶ月にわたって機械の状態をモニタしなければならないことを示す。
【0042】
上述及び請求項を通じて、文脈が明確に要求していない限り、用語「具える」、「具え」などは、排他的に又は網羅的な観念とは対照的に含むという概念である。すなわち、「含むが限定するものではない」という概念である。ここで用いる用語「接続された」、「結合された」又はこれらの任意の変形は、間接又は直接のいずれかで2つ以上の要素の間を任意に接続又は結合する意味であり、複数要素間の接続の結合は、物理的、論理的又はこれらの組合せである。更に、用語「ここで」、「上述」、「後述」及び類似の意味の用語は、本特許出願に用いる場合、全体としての本願を参照するものであり、本願の任意の特定部分を参照するのではない。文脈が許すならば、単一又は複数の数を用いる上述の詳細な説明内の用語は、夫々複数又は単一の数も含むものである。2つ以上の項目のリストを参照する用語「又は」は、用語の以下の解釈の全てをカバーする。すなわち、リスト内の任意の項目、リスト内の全ての項目、リスト内の項目の任意の組合せをカバーする。
【0043】
本発明の実施例の上述の詳細説明は、上述で開示した正確な形式に技術を網羅的に又は限定するものではない。本発明の特定実施例及び例を説明のために記載したが、当業者に理解できる如く、種々の均等な変更が本発明の要旨内で可能である。例えば、処理又はブロックが所定順序に示されたが、別の実施例では、異なる順序で、ステップのルーチンを実行してもよいし又はブロックを有するシステムを用いてもよいし、いくつかの処理又はブロックを削除、移動、追加、再分割、組合せ及び/又は変更して、別の又は再組合せを提供してもよい。これら処理又はブロックの各々は、種々の異なる方でインプリメンテーションしてもよい。また、処理又はブロックを一連に実行するように時間的に示したが、これら処理又はブロックを並行に実行してもよいし、異なる時間に実行してもよい。更に、ここで示した任意特定の数は単なる例であり、異なる値又は範囲で別のインプリメンテーションを用いてもよい。
【0044】
ここで説明した本発明の技術は、他のシステムに適用でき、上述のシステムが必然的ではない。上述の種々の実施例の要素及び動作を組合せて更なる実施例を提供できる。
【0045】
上述は、本発明のある実施例について説明し、予期できる最良モードについて説明したが、細部がどの様に説明に登場しようが、本技術は、多くの方法で実現できる。このシステムの細部は、そのインプリメンテーションの細部にて考慮の上変更でき、依然ここで説明した要旨の範囲内である。上述で気付くように、本発明のある特徴又は概念を説明する際に用いた特定の用語は、その用語に関係する本発明の任意特定の特徴、機能又は概念をここで再定義することを意味しない。一般的に、上述の詳細説明がかかる用語を明示的に定義しない限り、以下の請求項で用いる用語は、本明細書で説明した特定の実施例に本発明を限定するものではない。よって、本発明の実際の範囲は、開示した実施例のみを含むのではなく、本発明を実現又はインプリメンテーションする全ての等化の方法も含む。
【符号の説明】
【0046】
100 機器
110 機械設定エンジン
112 機械設定ユーザ・インタフェース
114 タコメータ
116 タコメータ・ポート
120 測定エンジン
122 測定ユーザ・インタフェース
130 データ取込みシステム
131 センサ・ポート
132 センサ
134 回転機械
140 デジタル信号処理
150 診断エンジン
152 診断ユーザ・インタフェース
160 機器設定
170 コンテキスト感応ヘルプ
180 メモリ
190 システム・リソース・ブロック
【技術分野】
【0001】
本発明は、一般に、回転機械の振動測定及び機械障害の診断に関する。
【背景技術】
【0002】
電気モータ、ファン、タービン、他の機械又はこれらの組合せの如き全ての形式の回転装置にて振動が生じる。振動は、その装置の一定動作の特性である。しかし、アンバランス、調整ミス、ベアリング摩耗、緩み及び偏心シャフトの如き機械状態により、装置を故障させる振動が生じる。振動波形を測定する加速度計の如きセンサを用いて、振動を測定できる。加速度計に関連して、振動分析器を用いて、存在する振動に関する頻度及び大きさの情報を得ることができる。この情報を用いて、故障前の障害を診断できる。
【0003】
従来、装置の状況を判断して、装置の障害と差し迫った装置の故障とを診断するには、振動データ収集及び分析に関する広範なトレーニングと経験が要求された。特定システムの以前の測定履歴から確立した予測保守データベースも従来用いて、回転機械状態を判断し、障害を診断した。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−285838号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、以前の測定履歴に基づかない回転機械状態を診断するユーザ・インタフェース・システム及び方法を提供する。
【課題を解決するための手段】
【0006】
本発明の概念は、次の通りである。
1.振動を測定し回転機械の障害を診断する機器であって;機械に関するパラメータを要求しユーザから受けるように構成された機械設定エンジンと;上記機械に関連する振動センサの配置及び方向の情報を要求し受けて、センサ測定が完了した場所を追跡するように構成された測定エンジンと;上記振動センサからのデータを受けるように構成されたデータ取込みエンジンと;該データ取込みエンジンからのデータを受け、規定設定を上記データに適用して(1)機械障害を診断し、(2)上記機械障害の重大度を判断するように構成された診断エンジンと;上記測定エンジン及び上記診断エンジンに結合され、(1)上記機械に関連する上記センサの場所及び方向、(2)上記ユーザに特定され上記センサで測定が行われた場所、及び(3)上記ユーザに特定され上記線による測定を行うことが依然必要な場所の少なくとも1つを示すように構成された測定ユーザ・インタフェースとを具え;上記診断エンジンが、以前に行った振動測定モニタ・データではなく、上記センサにより上記データ取込みエンジンに供給されたデータと上記機械に関する上記パラメータとに基づいて上記機械の障害を診断する機器。
2.上記データ取込みモジュールは、上記機械に結合されたタコメータから直接、シャフト速度を測定するように更に構成された概念1の機器。
3.上記センサは、3軸加速度計を具える概念1の機器。
4.上記センサは、単一軸加速度計を具える概念1の機器。
5.上記測定ユーザ・インタフェースが重大度スケールを示すように構成され、上記重大度スケール上に配置された重大度指示器が各診断済み機械障害の重大度のレベルを指示するように構成された概念1の機器。
6.上記重大度のレベルの文字説明を更に具える概念5の機器。
7.上記重大度スケールは、複数の重大度カテゴリに分割された連続スケールであり、各重大度カテゴリが色コード化された概念5の機器。
8.上記重大度スケールの緑色コードが軽微な問題を示し、上記重大度スケールの黄色コードが中位の問題を示し、上記重大度スケールのオレンジ色コードが重要な問題を示し、上記重大度スケールの赤色コードが極度の問題を示す概念7の機器。
9.上記わずかな重大度カテゴリは、保守行為を推奨せず、上記機械を再試験すべきで、定期保守の後に上記機械の状態をモニタすることを意味し;上記中位の重大度カテゴリは、数ヶ月までに又は1年までに保守行為を受けて、後で、測定の頻度を増やし、上記機械の状態をモニタするように推奨することを意味し;上記重要な重大度カテゴリは、次の数週間内の保守行為を推奨し、次の計画した休止時間又は保守期間中に保守行為を実行すべき事を推奨し;上記極度な重大度カテゴリは、直ちに保守行為が必要で、上記機械を停止すべきで、システムの故障を避けるために直ちに修理行為を受けるべきであることを意味する概念7の機器。
10.上記センサからの時間領域振動センサ・データを周波数領域データに変換するように構成されたデジタル信号プロセッサを更に具える概念1の機器。
11.上記機械設定エンジンは、ギア・パラメータを要求し受けるように構成された機械設定ユーザ・インタフェースを具える概念1の機器。
12.上記機械設定ユーザ・インタフェースは、シャフト速度、ギア比及びギア歯計数の少なくとも1つを要求し受けるように構成された概念11の機器。
13.上記機械設定ユーザ・インタフェースは、上記ギアに用いるベアリングの形式を要求し受けるように構成された概念11の機器。
14.上記機械設定ユーザ・インタフェースは、上記ギアに用いる変速機の数を要求し受けるように構成された概念11の機器。
15.ギアボックスの障害を診断する方法であって;シャフト速度、ギア比又はギア歯計数を含む上記ギアボックスの少なくとも1つのパラメータに関する情報を要求し;ユーザがシャフト速度を選択すると、上記ギアボックスの入力シャフト速度及び出力シャフト速度を受け;上記ユーザがギア比を選択すると、上記ギアボックスの上記入力及び上記出力の間のギア比を受け;上記ユーザがギア歯計数を選択すると、上記ギアボックスの入力ギア及び出力ギアのギア歯計数を受ける方法。
16.更に、上記ギアボックスに用いるベアリングの形式に関する情報を要求し;上記ギアボックスに用いるベアリングの形式に関する情報を受ける概念15の方法。
17.更に、上記ギアボックスに用いる変速機の数に関する情報を要求し;上記ギアボックスに用いる変速機の数に関する情報を受ける概念15の方法。
18.更に、上記ギアボックスとのたわみ継ぎ手に関する情報を要求し;上記たわみ継ぎ手に関する情報を受ける概念15の方法。
19.回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法であって;上記回転機械の構成要素に関するパラメータを受け;選択した信号測定場所を受け;上記センサにより振動測定を行い;以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転装置の障害を診断する方法。
20.上記センサが3軸加速度計である概念19の方法。
21.更に、センサ方向を表示し;選択したセンサの方向を受ける概念19の方法。
22.回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法の命令を実行するコンピュータ読み出し可能な媒体であって;上記方法が;上記回転機械の構成要素のパラメータを受け;選択された振動測定場所を受け;上記回転機械の図形モデルにセンサ場所のオプションを表示し;選択されたセンサ場所を受け;上記センサにより振動測定を行い;上記回転機械の図形モデルに上記選択された振動測定場所での振動測定を表示し;以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転機械の障害を診断する媒体。
【0007】
振動テスタと機械障害診断機器及び方法の例を図により示す。これら例及び図は、限定のためではなく説明のためである。
【図面の簡単な説明】
【0008】
【図1】図1は、本発明の実施例による振動データ収集及び機械診断機器の例を示すブロック図である。
【図2】図2は、本発明の実施例により、振動テスタ及び機械障害診断機器がシステム設定パラメータを促し受ける処理例を示す流れ図である。
【図3A】図3Aは、本発明の実施例により、システム設定パラメータを促し受ける質問及び見本応答を示す。
【図3B】図3Bは、本発明の実施例により、システム設定パラメータを促し受ける質問及び見本応答を示す。
【図3C】図3Cは、本発明の実施例により、システム設定パラメータを促し受ける質問及び見本応答を示す。
【図4A】図4Aは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図4B】図4Bは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図4C】図4Cは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図4D】図4Dは、本発明の実施例により、ギアボックス・パラメータを促し受ける質問及び見本応答を示す。
【図5】図5は、本発明の実施例により、振動テスタ及び機械障害診断機器がセンサ測定を促し受ける処理例を示す流れ図である。
【図6A】図6Aは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6B】図6Bは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6C】図6Cは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6D】図6Dは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6E】図6Eは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6F】図6Fは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図6G】図6Gは、本発明の実施例により、センサ測定場所及びセンサ方向情報を促し受けるスクリーン・ショットの例を示す。
【図7A】図7Aは、本発明の実施例により、機械障害の機器診断をユーザに示す図的方法として用いる重大度スケールを示す。
【図7B】図7Bは、本発明の実施例により、機械障害の診断をユーザに示すスクリーン・ショットの例を示す。
【発明を実施するための形態】
【0009】
以下の説明及び図は、説明のためであり、限定を意図するものではない。本発明を完全に理解できるようにするために多くの特定の詳細を述べる。しかし、特定の場合において、説明が不明瞭になるのを避けるために、周知又は従来の詳細については、説明しない。
【0010】
本発明の範囲を更に制限することを意図せずに、本発明の実施例による機器、装置、方法及びこれらの関連結果の例を以下に示す。本明細書で「一実施例」又は「ある実施例」と言及することは、実施例に関連して説明する特定の特徴、構造、又は特性が本発明の少なくとも1つの実施例に含まれることを意味する。明細書の種々の部分での「一実施例において」の句が現れるが、同じ実施例の全てを必然的に言及するものでもなく、相互に他の実施例を排除した別の又は代わりの実施例でもない。さらに、種々の特徴を説明するが、これらはいくつかの実施例で示されるものであり、他の実施例には示されないかもしれない。同様に、種々の条件について説明するが、これらは、いくつかの実施例の条件で他の実施例のものではないかもしれない。
【0011】
本明細書で用いる用語は、本技術において、本発明の文脈内で、各用語を用いる特定の文脈内で、一般的に本来の意味である。本発明を説明するのに用いるある用語を以下、即ち、明細書で説明して、本発明の説明に関する実務家に追加のガイドを与える。ここで説明するいくつかの用語の例を含む本明細書での例の用途は、単に説明のためであり、本発明又は任意の例示の用語の範囲及び意味を更に限定するものではない。同様に、本発明は、本明細書に示す種々の実施例に限定されない。
【0012】
以下の説明で用いる専門用語は、本発明のある特定例の詳細説明に関連して用いるが、その広範で合理的な方法にて解釈することを意図する。ある用語を以下に強調するが、任意の限定された方法で解釈されることを意図したある専門用語は、この詳細な説明の欄にて明白で限定的に定義される。
【0013】
回転装置から振動データを収集し、機械的障害用の振動信号を分析する機器を以下に説明する。この機器は、振動データ収集及び分析に未経験の初心者ユーザが構成したり利用したりすることができる。この機器は、簡略化した方法を促進し、非履歴に基づくしきい値、診断エンジン、3軸センサ方向及びコンテキスト感応ヘルプを用いて、推奨修理行為及び振動スペクトル付きの診断結果を出す。この機器により、ユーザは、回転装置の状態を迅速且つ容易に判断できる。ユーザには、振動分析の従来のトレーニング又は経験が要求されず、機械的障害を診断する機器を用いるために回転装置に対して予測保守データベースを確立する必要もない。
【0014】
図1は、本発明の実施例による振動テスタ及び機械診断機器100の例を示すブロック図である。機器100は、機械設定エンジン110、設定ユーザ・インタフェース112、測定エンジン120、測定ユーザ・インタフェース122、データ取込みシステム130、デジタル信号プロセッサ140、診断エンジン150及び診断ユーザ・インタフェース152を含む。機器100は、機器設定エンジン160、コンテキスト感応ヘルプ・データベース170及び1つ以上のメモリ・ユニット180も含む。
【0015】
機械障害状態を診断するのに機器100を用いることは、(1)被試験機械システムの設定と、(2)被試験システムの測定と、(3)被試験システムの診断とを含むことができる。機器100は、容易に理解できる方法をユーザに提供する。
【0016】
機械設定エンジン110を機械設定ユーザ・インタフェース112に結合できる。機械設定エンジン110は、ユーザが答える1組の質問を発生して、被診断装置の構成要素に関する充分な情報と、これら構成要素のパラメータを提供できる。機器100が要求できるパラメータの例には、これらに限定されるものではないが、モータ形式、速度、馬力、ベアリング形式、駆動構成要素への結合方法が含まれる。駆動した構成要素を特定する形式及び他のパラメータも要求してもよい。生じた質問を、機械設定ユーザ・インタフェース112を介してユーザに示すことができ、この機械設定ユーザ・インタフェース112は、ユーザが質問に応答するための回答選択又は余白を提供する。生じた質問の形式及び典型的なユーザ応答の非限定的な例を図3A〜3Cに示す。振動テスタ及び分析器を使用する充分な経験を期待できないユーザが機器100を用いることを意図するので、質問は、技能者が典型的には被診断システムの基本的な知識、又は被試験機械のラベル又はネームプレートから判る情報に基づいて答えられる直接的な質問である。ユーザが機械設定エンジン110に提供できる情報が増えると、診断信頼性の結果レベルが高くなる。機械設定エンジン110との典型的な対話を以下に説明する。
【0017】
機械設定エンジン110は、回転機械の関連部分の動作速度の手動入力を受け入れることができる。代わりに、機器100は、タコメータ114からのデータを受け入れることができるタコメータ入力ポート116を有する。タコメータ114をユーザが設定して、回転機械における駆動シャフトの回転速度をモニタできる。タコメータは、可変負荷状態での可変周波数駆動の動作速度を決定するのに特に有用である。タコメータ・パルスを発生できる多くの方法がある。例えば、反射テープを被モニタ装置の回転駆動シャフトの配置できる。光学トランスジューサは、光源からの光を伝送して、反射テープからの伝送光の反射を検出できる。回転駆動シャフトの各回転が1つのタコメータ・パルスを発生する。一実施例において、タコメータ114は、レーザ・タコメータを含んでいる。動作速度をモニタするタコメータとして用いることができるトランスジューサの他の例は、駆動シャフトに取り付けたエンコード・ディスクである。このエンコード・ディスクは、光電トランスジューサの間の光学ビームを遮って、タコメータ・パルスを発生する。
【0018】
測定エンジン120を測定ユーザ・インタフェース122に結合できる。測定エンジン120は、マシン設定エンジン110が受けた回答に基づいて1組の質問を発生できる。被診断システムの図的記述を測定エンジン120が提供でき、測定ユーザ・インタフェース122を介してユーザに示すことができる。例えば、被診断システムの駆動構成要素の形式及び駆動モータのパワーに基づいて、測定エンジン120は、振動データを収集できるシステム内の機械ハウジングに機械的に結合された回転構成要素の他の形式の場所又はベアリング場所を識別する。ユーザは、振動測定を行うセンサ場所としての測定ユーザ・インタフェース122を介して、これら場所の数までで、全てを含んで選択できる。構成要素につき少なくとも1つの振動測定を行うことにより、充分な振動情報を機器100が診断用に利用できる。さらに、ユーザが選択場所の各々にセンサを配置すると、振動データを得る場所の順序、被測定構成要素に対するセンサの場所、被測定構成要素のシャフトに対するセンサの方向などに関する情報をユーザは入力できる。発生する質問及び典型的なユーザの応答の形式の例を図4A〜4Dに示すが、それらに限定するものではない。ユーザがシステム内のユーザ選択振動測定場所の各々に対してセンサを設定するので、測定エンジン120は、関連情報をユーザに促す。機械設定エンジン110の典型的な対話を以下に説明する。
【0019】
機器100は、単一軸又は3軸加速度計の如きセンサ132からのデータを取り込むセンサ入力ポート131を含む。センサ132は、回転機械システム134からの振動を測定する。センサ132が記録した振動データは、機器100のセンサ・ポート131を介して、データ取込みシステム130に送ることができる。記録された振動データは、時間領域で採られる。次に、データ取り込みシステム130は、時間領域データをデジタル信号プロセッサ140に送り、デジタル信号プロセッサ140は、時間領域データを周波数領域スペクトラム・データに変換する。次に、種々のフィルタを用いて、周波数領域スペクトラム・データの結果が処理される。
【0020】
診断エンジン150を診断ユーザ・インタフェース152に結合する。一実施例において、診断エンジン150は、周波数領域データを、メモリに蓄積された規定設定と比較して、機械障害の診断及び保守の推奨を行う。各測定場所での機械障害の見積った重大度の図的表示を振動エンジン150が与え、診断ユーザ・インタフェース152を介してユーザに示される。簡潔な文字記述を図的重大度スケール表示と共に提供する。診断エンジン150との典型的な対話を後述する。
【0021】
また、機器100は、機器設定エンジン160と、コンテキスト感応ヘルプ・データベース170と、1つ以上のメモリ・ユニット180を有するシステム・リソース・ブロック190も含んでいる。機器設定エンジン160により、ユーザは、機器の自己試験を実行でき、データ及び時間の如き機器設定にアクセスでき、又はメモリ機能をクリアできる。コンテキスト感応ヘルプ・データベース170は、被試験システムの設定に関してユーザにしばしば尋ねる質問の答え、センサによる振動測定、診断結果、用語解説、又は機器による問題解決のためのヒントを提供できる。メモリ・ユニット180は、それらに限定するものではないが、RAM、ROM、揮発性及び不揮発性メモリの任意の組合せを含むことができる。機器設定エンジン160,コンテキスト感応ヘルプ・データベース170及び1つ以上のメモリ・ユニット180は、機械設定ユーザ・インタフェース112、測定ユーザ・インタフェース122及び診断ユーザ・インタフェース152を介してユーザとコミュニケーションができる。
【0022】
図2は、本発明の実施例により、機器100がシステム設定パラメータを促し受ける処理例を示す流れ図である。設定エンジン110が作る設定パラメータの質問を機械設定ユーザ・インタフェース112によりユーザに示すことができる。ブロック205にて、機器100は、被診断システムを駆動するモータを記述するユーザ・パラメータをユーザに促し、ユーザから受ける。典型的な対話における質問とユーザから得る応答との例を図3Aに示す。機器100により要求されるパラメータ310は、これらに限られないが、モータの形式(AC又はDC)、モータが可変周波数駆動(VFD)か否か、1分当たりの回転(RPM)でのモータの速度、馬力でのモータの公称パワー、モータが取り付けられた方向(水平又は垂直)、モータ・ベアリングの形式(ローラ又はジャーナル)、又は駆動とレンダリングからモータを外したかを含む。
【0023】
次にブロック210にて、機器100は、モータ用の継ぎ手情報をユーザに促しユーザから受ける。典型的な対話における質問とユーザから得る見本応答との例を図3Bに示す。例えば、セクション320にて、機器100は、モータがぴったりと結合したトランスミッションを含むかを質問し、セクション322にて、システム内のモータ及び次の構成要素の間に継ぎ手があるかを質問する。次にブロック215(図2)において、機器100は、次の構成要素についてユーザに質問する(必要に応じて)。
【0024】
判断ブロック220にて、機器100は、モータが駆動する構成要素がギアボックス421かを判断する。構成要素がギアボックスでなければ(ブロック220がノー)、処理はブロック250に進み、機器100は、他の駆動構成要素の情報をユーザに促しユーザから得る。促した質問は、モータが駆動する構成要素の形式を特定してもよい。質問と、ネジ・コンプレッサについてユーザから得た見本応答330を図3Cに示す。処理は、ブロック299で終わる。
【0025】
図4Aは、ファン410を駆動するギアボックス406に結合されたモータ402を具える駆動トレインの例401を示す。駆動トレイン401内の継ぎ手404及び408は、モータ402がギアボックス406に結合され、ギアボックスがファン410に結合されていることを夫々示す。ギアボックス406に関係する質問及び見本応答の例を図4Aのセクション420に示す。
【0026】
次の構成要素がギアボックス421ならば(ブロック220でイエス)、ブロック225にて、機器100は、ギアボックス421に用いるベアリング422の形式をユーザに促しユーザから受ける。次にブロック230にて、機器100は、ギアボックス421に用いる変速機424の数をユーザに促しユーザから受ける。次にブロック235にて、機器100は、図4Aに示す如き選択によるドロップ・ダウン・メニュー426を提供して、ギアボックスに関してユーザが判っていることを判断する。ギアボックスについて以下の情報の少なくとも1つの項目をユーザが提供できる。すなわち、シャフト速度427、ギア比428、又はギア歯計数429である。
【0027】
図4Bは、ギアボックス421のシャフト速度に関係する質問及び見本応答の例を示す。ユーザが既知のパラメータとしてシャフト速度430を選択すると、ブロック240にて、機器100は、ギアボックスの入力432とギアボックスの出力434にて、シャフト速度をユーザに促しユーザから受ける。この処理は、上述の如くブロック250に続く。
【0028】
図4Cは、ギアボックス421のギア比に関連する質問及び見本応答の例を示す。ユーザがギア比を既知のパラメータとして選択すると、ブロック242にて、機器100は、ギアボックスの入力442から出力444にギア比をユーザに促しユーザから受ける。処理は、上述の如く、ブロック250に続く。
【0029】
図4Dは、ギアボックス421のギア歯計数に関連する質問及び見本応答の例を示す。ユーザがギア歯計数450を既知のパラメータとして選択すると、機器100は、ギアボックスの入力ギア452及びギアボックスの出力ギア454でギア歯計数をユーザに促しユーザから受ける。処理は、上述の如く、ブロック250に続く。
【0030】
図5は、本発明の実施例により、振動テスタ及び機械障害診断機器100がセンサ測定を促し受ける処理の例500を示す流れ図である。ブロック505にて、機器100は、処理200での機械設定エンジン110との対話にてユーザが入力した被診断システムの構成要素を図的に表示する。構成要素の各々に基準のフレームとして駆動シャフト軸と共にマークを付けることができる。一実施例において、システム構成要素とは異なる色で駆動シャフト軸にマークを付けることができ、例えば、駆動シャフトを赤で示し、駆動トレインを黒で示すことができる。コンプレッサ606に結合されたモータ602を具えるシステムの図的構成要素表示の非限定の例を図6Aの例示のスクリーン・ショットに示す。
【0031】
ブロック510にて、機器100は、機械ハウジングに機械的に結合されたベアリング又は他の形式又は回転構成要素の場所を表示する。ユーザは、センサにより振動測定を行うためにシステム内のこれらの任意の場所を選択できる。特定の場所610、611、612及び613での機器100による振動データの測定を任意の特定順序で行えるが、典型的な測定は、駆動モータの自由端から順次開始し、駆動構成要素の駆動端にて終了する。むしろ、機器100は、後述のように、振動測定を既に行い被測定として残す場所の軌跡を維持することにより、測定順序を決める際にユーザに柔軟性を与えることができる。どの場所を既に測定し、どの場所を被測定として残すかに関する情報をユーザに判りやすいフォーマットで図的に提供できる。
【0032】
ブロック515にて、機器100は、機械構成要素のセンサ配置場所の入力を受ける。ユーザは、適切なセンサ場所が強調されるまで、機器100の入力ダイアルを回転させて、測定場所を選択できる。一実施例において、選択されたセンサ場所は、異なる色で、例えば、オレンジで強調される。図6Aの例において、駆動モータ602の自由端における第1センサ場所610は、ディフォルトにより機器100が強調する。例えば、測定用のセンサ場所を選択するために機器の入力ダイアルを回転するようにユーザが促される。図6Bの例において、センサ場所2と図の下のテキスト625を強調して示すように、第2センサ場所621をユーザが選択する。選択されずまだ測定されない残りのセンサ場所620、622及び623は強調されない。さらに、駆動トレイン及びセンサ場所の図の下で、機器100は、センサ測定用にユーザが行う選択に関するテキスト情報625を提供できる。例えば、機器100のファンクション・キーF3を押してセンサ方向情報を入力するようにユーザを促すこともできる。
【0033】
ブロック520にて、機器100は、機械構成要素に関するセンサの3つの可能な方向を図的に示す。3つのセンサの方向の例を図6Cに示す。(1)センサ630が構成要素の頂部又は底部に配置される。(2)センサ631が構成要素の側部に配置される。または(3)センサ632が構成要素の端部に配置される。次にブロック525にて、機器100は、特定のセンサに対するセンサ方向に関するユーザ入力を受ける。
【0034】
ブロック530にて、機器100は、センサ・ケーブル方向に対する2つの可能なシナリオを図的に示す。2つのセンサ・ケーブル方向の例を図6Dに示す。(1)センサ・ケーブル641は、駆動軸から離れている。または(2)センサ・ケーブル642は、駆動軸と交差している。次に、ブロック535にて、機器100は、特定のセンサ用のセンサ・ケーブル方向に関するユーザ入力を受ける。2008年11月26日に出願された米国特許出願第12/324682号は、3軸加速度計の方向を相関させるシステム及び方法を開示しており、ここではそのまま完全に参照文献として含ませる。
【0035】
判断ブロック540にて、機器100は、ユーザが機器100に測定を行うように促したかを判断する。上述のように、ユーザが適切にセンサを設定し、センサ場所、センサ方向、及び/又は機器100に対するセンサ・ケーブルの方向を提供した後に、ユーザは、測定を行うように機器100を促す。図6Eは、スクリーン・ショットの一例を示し、テキスト650は、機器100がセンサ場所、センサ方向、場所2でのセンサ・ケーブルの方向を受け、機器100がセンサのデータを記録する準備ができたことを示す。機器によりセンサ振動測定を行うように、例えば、機器100のファンクション・キーF3を押すようにユーザを促すことができる。センサ入力にてセンサ情報を機器100に記録するようにユーザが機器100に命令しないと(ブロック540にてノー)、処理は判断ブロック540に残る。ユーザが測定を行うように機器100に命令すると、ブロック545にて、機器100は、機器へのセンサ入力ポート131でのセンサ情報を読取る。
【0036】
次にブロック550にて、機器100は、データが丁度記録されたセンサ場所を図的に表示する。スクリーン・ショットの例を図6Fに示す。センサ場所671を異なる色、例えば緑にて強調して、センサ場所2でのセンサ測定が完了したことを示すことができる。テキスト670も、場所2での測定が「完了」したことを示す。
【0037】
判断ブロック555にて、機器100は、被測定振動データ用の次のセンサ場所をユーザが選択したかを判断する。図6Gは、スクリーン・ショットの例を示し、次の被測定センサ場所としてセンサ場所4をユーザが強調している。図6Gにおいて、センサ場所2の682は、ある色、例えば緑で強調されて、測定が完了したことを示す。センサ4の684は、他の色、例えばオレンジで強調されて、これがアクティブな被測定センサ場所であることを示す。第1及び第3センサ場所681及び683は、測定されていないし、まだ被測定にも選択されていないので、非強調で残る。異なる色により、以前に測定した場所、現在測定中の場所、及び測定が残っている場所を追跡するのがユーザにとって容易である。更に、テキスト685は、センサ場所2が測定され、センサ場所4が測定するように選択されたアクティブな場所であることを示す。ユーザが次のセンサ場所を選択しないと(ブロック555でノー)、処理は判断ブロック555に残る。ユーザが次のセンサ場所を選択すると(ブロック555でイエス)、機器100はブロック510に戻り、機器100は、データがまだ得られていないセンサ測定場所を表示する。
【0038】
図7Aは、本発明の実施例により、機器100の診断をユーザに示す図的方法として用いる入内度スケール700Aを示す。重大度スケール700Aは、例えば、機器100での測定の時点での振動の強さに基づいてもよい。状態が変化すると、診断の重大度が変化し一様に現れて、例えば、被試験機械の注油の直後に改善する。しかし、時間と伴に、機械の連続動作により状態が次第に悪くなり、摩耗及び裂傷を受ける。故障の時間は、装置の形式、経年、機械負荷、環境条件、及び他の変数に応じて変化する。各重大度レベルを故障の特定時間に相関できないので、重大度スケールは、重大度の各レベルにおける機械故障を避けるための動作を単に推奨するだけである。
【0039】
図7Aに示すように、一実施例において、重大度スケール700Aを4レベルで作り、重大度におけるレベルが、スケールの左端754の最小重大度からスケールの右端752の最大重大度まで進む。しかし、重大度スケールは、任意の数のレベルで作ることができ、スケールを水平方向又は垂直方向に拡張できる。重大度レベルの例は、軽微710、中位720、重要730及び極度740を含んでもよい。各レベルは、コード化された色でよく、診断の重大度に関してユーザに直感の指示を与えることができる。よって、問題の最小重大度指示では、緑色コード710が「軽微」な重大度診断に対応し、黄色コード720が「中位」診断に対応し、オレンジ色コード730が「重要」診断に対応し、赤色コード740が「極度」診断に対応する。診断の重大度の指示は、スケールのスライダ750によりできる。スライダは、最小重大度754から最大重大度752までの全重大度スケールにわたって変化する。
【0040】
「軽微」診断では、保守行為が推奨されない。しかし、機械を再試験し、定期保守の後に状態をモニタすることが推奨される。「中位」診断では、月の単位で、その後、1年で均等になるように、保守行為を行うのが推奨される。測定の頻度を増やし、機械の状態をモニタすることも推奨される。「重要」診断では、次の数週間内に保守行為が推奨される。次の計画休止期間又は保守期間中に、保守行為を実行することも推奨される。「極度」診断では、保守行為が直ちに必要である。システム故障を避けるために、操作者は、機械を停止し、直ちに修理行為を行うことを考慮することも推奨される。
【0041】
図7Bは、診断ユーザ・インタフェース152を用いて表示された診断エンジン150による診断の例を示す。駆動トレインの図形710は、センサ測定場所701、702、703及び704と共に、図7Bの上部に示される。第1及び第2センサ場所701及び702は、図的に強調されて、機械障害が診断された場所にユーザの注意を引く。強調されないセンサ場所703及び704は、これらの場所で機械障害が診断されていないことを示す。重大度スケール720及び730と、対応する簡潔な説明文725及び735とが、強調されたセンサ場所の各々の図形の下に示される。第1センサ場所701では、モータの自由端に対応して、重大度スケール720のスライダ721がオレンジ又は「重大」部類に配置されて、次の数週間以内の保守行為が推奨されることを示す。第2センサ場所702では、モータの駆動端に対応して、重大度スケール730のスライダ731が黄又は「中位」部類内に配置されて、測定の頻度を増やし、次の数ヶ月にわたって機械の状態をモニタしなければならないことを示す。
【0042】
上述及び請求項を通じて、文脈が明確に要求していない限り、用語「具える」、「具え」などは、排他的に又は網羅的な観念とは対照的に含むという概念である。すなわち、「含むが限定するものではない」という概念である。ここで用いる用語「接続された」、「結合された」又はこれらの任意の変形は、間接又は直接のいずれかで2つ以上の要素の間を任意に接続又は結合する意味であり、複数要素間の接続の結合は、物理的、論理的又はこれらの組合せである。更に、用語「ここで」、「上述」、「後述」及び類似の意味の用語は、本特許出願に用いる場合、全体としての本願を参照するものであり、本願の任意の特定部分を参照するのではない。文脈が許すならば、単一又は複数の数を用いる上述の詳細な説明内の用語は、夫々複数又は単一の数も含むものである。2つ以上の項目のリストを参照する用語「又は」は、用語の以下の解釈の全てをカバーする。すなわち、リスト内の任意の項目、リスト内の全ての項目、リスト内の項目の任意の組合せをカバーする。
【0043】
本発明の実施例の上述の詳細説明は、上述で開示した正確な形式に技術を網羅的に又は限定するものではない。本発明の特定実施例及び例を説明のために記載したが、当業者に理解できる如く、種々の均等な変更が本発明の要旨内で可能である。例えば、処理又はブロックが所定順序に示されたが、別の実施例では、異なる順序で、ステップのルーチンを実行してもよいし又はブロックを有するシステムを用いてもよいし、いくつかの処理又はブロックを削除、移動、追加、再分割、組合せ及び/又は変更して、別の又は再組合せを提供してもよい。これら処理又はブロックの各々は、種々の異なる方でインプリメンテーションしてもよい。また、処理又はブロックを一連に実行するように時間的に示したが、これら処理又はブロックを並行に実行してもよいし、異なる時間に実行してもよい。更に、ここで示した任意特定の数は単なる例であり、異なる値又は範囲で別のインプリメンテーションを用いてもよい。
【0044】
ここで説明した本発明の技術は、他のシステムに適用でき、上述のシステムが必然的ではない。上述の種々の実施例の要素及び動作を組合せて更なる実施例を提供できる。
【0045】
上述は、本発明のある実施例について説明し、予期できる最良モードについて説明したが、細部がどの様に説明に登場しようが、本技術は、多くの方法で実現できる。このシステムの細部は、そのインプリメンテーションの細部にて考慮の上変更でき、依然ここで説明した要旨の範囲内である。上述で気付くように、本発明のある特徴又は概念を説明する際に用いた特定の用語は、その用語に関係する本発明の任意特定の特徴、機能又は概念をここで再定義することを意味しない。一般的に、上述の詳細説明がかかる用語を明示的に定義しない限り、以下の請求項で用いる用語は、本明細書で説明した特定の実施例に本発明を限定するものではない。よって、本発明の実際の範囲は、開示した実施例のみを含むのではなく、本発明を実現又はインプリメンテーションする全ての等化の方法も含む。
【符号の説明】
【0046】
100 機器
110 機械設定エンジン
112 機械設定ユーザ・インタフェース
114 タコメータ
116 タコメータ・ポート
120 測定エンジン
122 測定ユーザ・インタフェース
130 データ取込みシステム
131 センサ・ポート
132 センサ
134 回転機械
140 デジタル信号処理
150 診断エンジン
152 診断ユーザ・インタフェース
160 機器設定
170 コンテキスト感応ヘルプ
180 メモリ
190 システム・リソース・ブロック
【特許請求の範囲】
【請求項1】
振動を測定し回転機械の障害を診断する機器であって、
機械に関するパラメータを要求しユーザから受けるように構成された機械設定エンジンと、
上記機械に関連する振動センサの配置及び方向の情報を要求し受けて、センサ測定が完了した場所を追跡するように構成された測定エンジンと、
上記振動センサからのデータを受けるように構成されたデータ取込みエンジンと、
該データ取込みエンジンからのデータを受け、規定設定を上記データに適用して(1)機械障害を診断し、(2)上記機械障害の重大度を判断するように構成された診断エンジンと、
上記測定エンジン及び上記診断エンジンに結合され、(1)上記機械に関連する上記センサの場所及び方向、(2)上記ユーザに特定され上記センサで測定が行われた場所、及び(3)上記ユーザに特定され上記線による測定を行うことが依然必要な場所の少なくとも1つを示すように構成された測定ユーザ・インタフェースとを具え、
上記診断エンジンが、以前に行った振動測定モニタ・データではなく、上記センサにより上記データ取込みエンジンに供給されたデータと上記機械に関する上記パラメータとに基づいて上記機械の障害を診断する機器。
【請求項2】
ギアボックスの障害を診断する方法であって、
シャフト速度、ギア比又はギア歯計数を含む上記ギアボックスの少なくとも1つのパラメータに関する情報を要求し、
ユーザがシャフト速度を選択すると、上記ギアボックスの入力シャフト速度及び出力シャフト速度を受け、
上記ユーザがギア比を選択すると、上記ギアボックスの上記入力及び上記出力の間のギア比を受け、
上記ユーザがギア歯計数を選択すると、上記ギアボックスの入力ギア及び出力ギアのギア歯計数を受ける方法。
【請求項3】
回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法であって、
上記回転機械の構成要素に関するパラメータを受け、
選択した信号測定場所を受け、
上記センサにより振動測定を行い、
以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転装置の障害を診断する方法。
【請求項4】
回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法の命令を実行するコンピュータ読み出し可能な媒体であって、上記方法が、
上記回転機械の構成要素のパラメータを受け、
選択された振動測定場所を受け、
上記回転機械の図形モデルにセンサ場所のオプションを表示し、
選択されたセンサ場所を受け、
上記センサにより振動測定を行い、
上記回転機械の図形モデルに上記選択された振動測定場所での振動測定を表示し、
以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転機械の障害を診断する媒体。
【請求項1】
振動を測定し回転機械の障害を診断する機器であって、
機械に関するパラメータを要求しユーザから受けるように構成された機械設定エンジンと、
上記機械に関連する振動センサの配置及び方向の情報を要求し受けて、センサ測定が完了した場所を追跡するように構成された測定エンジンと、
上記振動センサからのデータを受けるように構成されたデータ取込みエンジンと、
該データ取込みエンジンからのデータを受け、規定設定を上記データに適用して(1)機械障害を診断し、(2)上記機械障害の重大度を判断するように構成された診断エンジンと、
上記測定エンジン及び上記診断エンジンに結合され、(1)上記機械に関連する上記センサの場所及び方向、(2)上記ユーザに特定され上記センサで測定が行われた場所、及び(3)上記ユーザに特定され上記線による測定を行うことが依然必要な場所の少なくとも1つを示すように構成された測定ユーザ・インタフェースとを具え、
上記診断エンジンが、以前に行った振動測定モニタ・データではなく、上記センサにより上記データ取込みエンジンに供給されたデータと上記機械に関する上記パラメータとに基づいて上記機械の障害を診断する機器。
【請求項2】
ギアボックスの障害を診断する方法であって、
シャフト速度、ギア比又はギア歯計数を含む上記ギアボックスの少なくとも1つのパラメータに関する情報を要求し、
ユーザがシャフト速度を選択すると、上記ギアボックスの入力シャフト速度及び出力シャフト速度を受け、
上記ユーザがギア比を選択すると、上記ギアボックスの上記入力及び上記出力の間のギア比を受け、
上記ユーザがギア歯計数を選択すると、上記ギアボックスの入力ギア及び出力ギアのギア歯計数を受ける方法。
【請求項3】
回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法であって、
上記回転機械の構成要素に関するパラメータを受け、
選択した信号測定場所を受け、
上記センサにより振動測定を行い、
以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転装置の障害を診断する方法。
【請求項4】
回転機械の障害を診断するためにセンサにより振動測定を判断し追跡する方法の命令を実行するコンピュータ読み出し可能な媒体であって、上記方法が、
上記回転機械の構成要素のパラメータを受け、
選択された振動測定場所を受け、
上記回転機械の図形モデルにセンサ場所のオプションを表示し、
選択されたセンサ場所を受け、
上記センサにより振動測定を行い、
上記回転機械の図形モデルに上記選択された振動測定場所での振動測定を表示し、
以前に行った振動測定モニタ・データではなく上記センサが行った上記振動測定に基づいて上記回転機械の障害を診断する媒体。
【図1】


【図2】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図4D】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図6E】
【図6F】
【図6G】
【図7A】
【図7B】
【図2】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図4D】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図6E】
【図6F】
【図6G】
【図7A】
【図7B】
【公開番号】特開2011−145295(P2011−145295A)
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−5647(P2011−5647)
【出願日】平成23年1月14日(2011.1.14)
【出願人】(509233459)フルークコーポレイション (9)
【氏名又は名称原語表記】Fluke Corporation
【住所又は居所原語表記】6920 Seaway Boulevard, Everett, Washington 98203 U.S.A.
【Fターム(参考)】
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2011−5647(P2011−5647)
【出願日】平成23年1月14日(2011.1.14)
【出願人】(509233459)フルークコーポレイション (9)
【氏名又は名称原語表記】Fluke Corporation
【住所又は居所原語表記】6920 Seaway Boulevard, Everett, Washington 98203 U.S.A.
【Fターム(参考)】
[ Back to top ]