
振動特性測定装置および振動特性測定方法
【課題】振動特性の測定時に、許容値を超えることなく回転体を振動させ、エネルギの消費量を増やすことなく高品質のデータを取得可能な振動特性測定装置および振動特性測定方法を提供することを課題とする。
【解決手段】多段遠心圧縮機の回転体を支持する磁気軸受12と、回転体の振幅を測定する変位センサ13と、磁気軸受12に電流を供給する電流増幅器11と、回転体を加振する加振制御信号を出力するとともに、加振制御信号に対する回転体の振動の応答特性を、回転体の振幅に基づいて測定する加振制御装置7を備え、加振制御装置7は応答特性の測定時に、回転体の不釣合い振動を解消する振動解消信号を加振制御信号に加算した回転体制御信号を出力し、電流増幅器11は回転体制御信号に応じた磁力を発生させる電流を磁気軸受12に供給する振動特性測定装置1とする。また、その振動特性測定装置1における振動特性測定方法とする。
【解決手段】多段遠心圧縮機の回転体を支持する磁気軸受12と、回転体の振幅を測定する変位センサ13と、磁気軸受12に電流を供給する電流増幅器11と、回転体を加振する加振制御信号を出力するとともに、加振制御信号に対する回転体の振動の応答特性を、回転体の振幅に基づいて測定する加振制御装置7を備え、加振制御装置7は応答特性の測定時に、回転体の不釣合い振動を解消する振動解消信号を加振制御信号に加算した回転体制御信号を出力し、電流増幅器11は回転体制御信号に応じた磁力を発生させる電流を磁気軸受12に供給する振動特性測定装置1とする。また、その振動特性測定装置1における振動特性測定方法とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、多段遠心圧縮機など、回転機械の回転軸の振動特性を測定する振動特性測定装置と振動特性測定方法に関する。
【背景技術】
【0002】
油田、天然ガスプラント、石油化学プラント等に配置されて各種ガスや液体などの被圧縮流体を圧縮する多段遠心圧縮機は、複数段からなる遠心羽根車を回転軸とともに回転させ、遠心力によって被圧縮流体を圧縮する回転機械である。
このような多段遠心圧縮機には、遠心羽根車の各段からの被圧縮流体の漏れを防止するために、回転軸の軸線を中心とする環状のシール部材を含んで構成されるシール機構が備わっている。
多段遠心圧縮機に備わるシール機構では被圧縮流体の漏れ流れによる不安定化力が発生し、この不安定化力が回転軸や遠心羽根車の回転の安定性に影響を与える。つまり、不安定化力が安定化力を上回ると、シールホワールと呼ばれる自励振動が発生する。
【0003】
したがって、回転機械は、シール機構に発生する不安定化力に対して充分に大きな安定化力を発生するように設計されることが重要になる。このために、回転軸を含む回転体の振動特性を測定してその特性を把握し、振動特性に基づいて安定性を評価することが必要である。
【0004】
例えば、特許文献1には、軸受部に振動を与え、その振動によって回転軸に生じる振動を解析することによって、運転中の回転機械の振動特性を実測する技術が開示されている。また、非特許文献1には、圧縮機の回転軸の軸端に能動型のラジアル磁気軸受を取り付け、この磁気軸受に励磁電流を供給して回転軸を加振し、回転軸の振動特性を実測する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平5−5057号公報
【非特許文献】
【0006】
【非特許文献1】Pettinato、他2名、「Shop Acceptance Testing of Compressor Rotordynamic Stability and Theoretical Correlation」、第39回ターボマシナリシンポジウム、テキサス、2011年、31頁〜42頁
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1や非特許文献1に記載される技術は、回転している回転軸を加振し、回転軸の振動(振幅と位相)を測定することによって、回転軸の振動特性を測定する技術である。
このように回転軸など回転体の振動特性を測定する場合、ばらつきの少ない高品質なデータを取得するためには、加振振幅が大きいことが好ましい。加振によって振動する回転体の振幅を大きくすることによって、振動を測定するセンサが出力する信号のSN比を向上でき、振幅を示すデータとして高品質なデータを取得できる。
【0008】
一方、回転している回転体の振幅が加振によって増大したときに、設計値として決定される許容値を超えた振幅になると、例えば回転体とシール機構が接触してシール機構に備わるシール部材が磨耗するなどの問題が発生する。したがって、回転体に発生する振幅が許容値を超えない範囲で加振する必要がある。
しかしながら、回転機械の回転体は質量の偏りなどによって、通常の回転時にも許容値を超えない振幅の範囲で振動している。したがって、回転中の回転体への加振によって発生させることのできる振動の振幅は、通常の回転時における振動の振幅と許容値のマージンの範囲内に制限される。換言すると、加振によって回転軸に発生できる振動が小さく抑えられることになり、振動を測定するセンサが出力する信号のSN比が悪くなる。そして、この信号に基づいて取得されるデータ(回転軸の振動特性を示すデータ)の品質が低下するという問題がある。
【0009】
例えば取得したデータの品質が悪い場合、取得するデータ数を大幅に増やして平均化処理することによって、振動解析することが可能である。
しかしながら、平均化処理をするために大量のデータを取得すると、データの取得に時間がかかり工数が増大するという問題がある。また、大量のデータを取得するために回転軸の運転時間や加振する時間が長くなり、エネルギの消費量が増えるという問題もある。
【0010】
そこで、本発明は、振動特性の測定時に、許容値を超えることなく回転体を振動させ、エネルギの消費量を増やすことなく高品質のデータを取得可能な振動特性測定装置および振動特性測定方法を提供することを課題とする。
【課題を解決するための手段】
【0011】
前記課題を解決するため本発明は、回転機械の回転体を非接触支持する磁気軸受と、前記回転体が振動するときの振幅を測定する測定装置と、前記磁気軸受に電流を供給する電流供給装置と、前記回転体を加振するように前記磁気軸受を制御する加振制御信号を出力するとともに、前記測定装置が測定する前記振幅に基づいて、前記加振制御信号に対する前記回転体の振動の前記加振制御信号に対する応答特性を測定する加振制御装置と、を備える振動特性測定装置とする。そして、前記加振制御装置は前記応答特性を測定するときに、前記回転体が回転するときに発生する不釣合い振動を前記磁気軸受で解消するための振動解消信号を前記加振制御信号に加算した回転体制御信号を出力し、前記電流供給装置は、前記回転体制御信号に応じた磁力を発生させる電流を前記磁気軸受に供給することを特徴とする。また、この振動特性測定装置における振動特性測定方法とする。
【発明の効果】
【0012】
本発明によると、振動特性の測定時に、許容値を超えることなく回転体を振動させ、エネルギの消費量を増やすことなく高品質のデータを取得可能な振動特性測定装置および振動特性測定方法を提供できる。
そして、軸受やシール機構の損傷やシール機構の磨耗などの不具合を生じさせることなく振動特性を測定できる。
【図面の簡単な説明】
【0013】
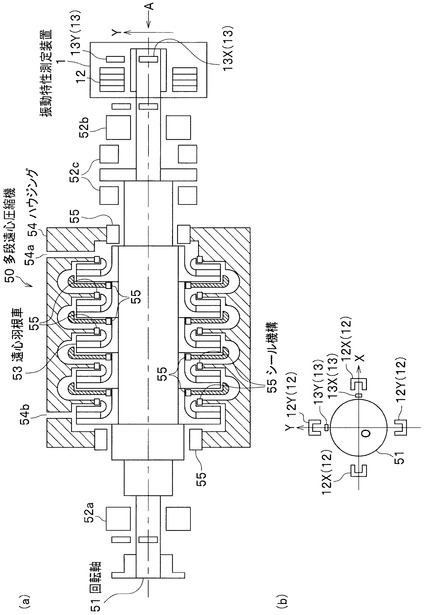
【図1】(a)は本実施形態に係る振動特性測定装置を取り付けた多段遠心圧縮機を側面から見た概略構成図、(b)は振動特性測定装置の磁気軸受と多段遠心圧縮機の回転軸をAの方向から見た概略図である。
【図2】(a)は回転軸の不釣合い振動をモデル化した図、(b)は回転軸の振幅と許容値のマージンを説明するための図である。
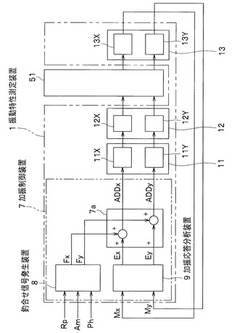
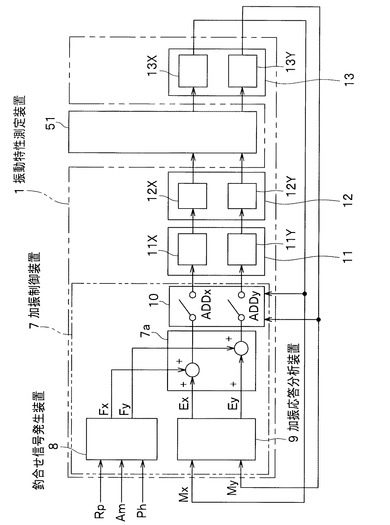
【図3】振動特性測定装置の機能ブロックを示す図である。
【図4】(a)は従来の振動特性測定装置で加振したときの回転軸のX軸方向の振幅を示す図、(b)は本実施形態に係る振動特性測定装置で加振したときの回転軸のX軸方向の振幅を示す図である。
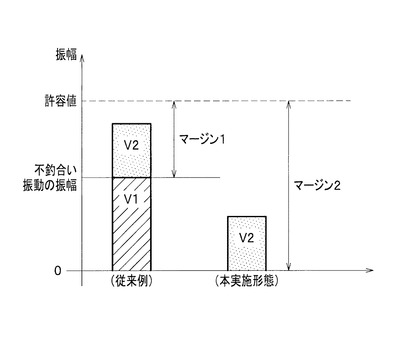
【図5】回転軸の振幅と許容値のマージンを従来例と本実施形態で比較する図である。
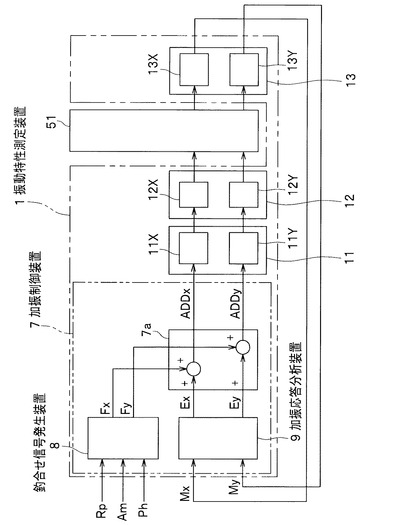
【図6】加振信号遮断器を有する加振制御装置を備える振動特性測定装置の機能ブロックを示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について、適宜図を参照して詳細に説明する。
図1の(a)に示すように、本実施形態に係る振動特性測定装置1は、多段遠心圧縮機50などの回転機械に取り付けられて回転軸51や遠心羽根車53を含む回転体の振動特性を測定可能な装置である。
本実施形態に係る振動特性測定装置1は多段遠心圧縮機50に限定されず、回転軸51などの回転体を有する回転機械(タービン、電動機等)に取り付け可能であるが、以下では多段遠心圧縮機50に取り付けられる一例を説明する。
【0015】
図1の(a)に示すように構成される多段遠心圧縮機50は、ガスなどの被圧縮流体を、回転軸51とともに回転する遠心羽根車53の遠心力で連続的に圧縮する装置であり、回転軸51は図示しない駆動源(電動機等)によって回転駆動する。
【0016】
遠心羽根車53は、回転軸51の軸方向に多段に備わって回転軸51とともに回転し、中心側(回転軸51側)から吸込んだ被圧縮流体を圧縮して遠心力で外周から吐出するように構成されている。
【0017】
回転軸51は、複数の軸受部材に回転可能に支持される。例えば、遠心羽根車53を軸方向に挟むように2箇所に備わる軸受部材52a、52bによって回転軸51はラジアル方向に支持される。また、回転軸51をアキシャル方向に支持する軸受部材52cによって、回転軸51の軸方向への変動が規制される。
このように回転軸51は複数の軸受部材52a〜52cによって回転可能に支持されている。
【0018】
また、遠心羽根車53は、静止体であるハウジング54に収納され、入口部54aから取り込まれる被圧縮流体が多段の遠心羽根車53によって圧縮されて出口部54bから吐出するように構成される。
以下、回転軸51や遠心羽根車53を含み、回転軸51と一体に回転する構造物を総称して「回転体」と記載する場合がある。また、回転体に対して静止している構造物(ハウジング54等)を総称して「静止体」と記載する場合がある。
【0019】
このように構成される多段遠心圧縮機50では、ハウジング54の入口部54aから取り込まれた被圧縮流体が遠心羽根車53を通ることなくハウジング54から吐出されると、被圧縮流体が圧縮されない状態で出口部54bから吐出されることになり、多段遠心圧縮機50の圧縮効率が低下する。そこで圧縮効率を向上するため、ハウジング54(静止体)と、回転軸51や遠心羽根車53(回転体)の間隙をシールするように適宜シール機構55が備わっている。
【0020】
シール機構55は、例えば、遠心羽根車53の上流段(入口部54a側)から、遠心羽根車53とハウジング54の間隙を通って下流段(出口部54b側)に流れ込むことを防止するために、ハウジング54と遠心羽根車53の間隙をシールするように備わっている。
また、遠心羽根車53の軸方向の両端部には、ハウジング54と回転軸51の間隙をシールするためのシール機構55が備わっている。
【0021】
このように適宜備わるシール機構55は、静止体と回転体の間に微小なクリアランスが形成されるように備わるシール部材(図示せず)を有し、被圧縮流体の流れを妨げるように構成される。
また、クリアランスが形成されることによって、例えば静止体に備わるシール機構55のシール部材が回転体と接触することが防止され、シール部材の磨耗が抑制される。
なお、図1には、シール機構55が静止体(ハウジング54)に備わる構成が図示されているが、シール機構55が回転体(回転軸51、遠心羽根車53等)に備わる構成であってもよい。また、シール機構55が、ハウジング54以外の静止体に備わる場合もある。
【0022】
回転軸51や遠心羽根車53などを含んで構成される回転体は、周方向の質量が均一ではなく回転するときに微小な振動(不釣合い振動)が発生する。
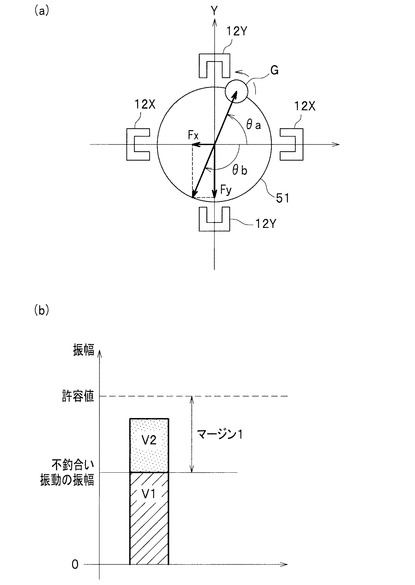
回転体の質量が周方向に均一でない場合、図2の(a)示すように、周方向の1点が質量の集中点(質量集中点G)となるように回転体をモデル化することができる。質量集中点Gを有する回転体が回転すると質量集中点Gには遠心力が作用して外方に引き寄せられ、回転体は質量集中点Gの方に変位する。このような変位が回転体の回転にともなって連続的に発生し、不釣合い振動が発生する。
なお、図2の(a)に示す12X,12Yは、回転軸51を非接触支持するように振動特性測定装置1(図1の(a)参照)に備わる磁気軸受12の電磁石である。
【0023】
このように、回転体には不釣合い振動が発生するため、静止体に備わるシール機構55は不釣合い振動が発生した場合であっても回転体と接触しないようにクリアランスが形成されていることが好ましいが、クリアランスが大きくなると被圧縮流体の流れを妨げるシール性能が低下する。
そこで、回転体の不釣合い振動を常に監視し、その振幅が所定の許容値を超えないように回転体の運転を管理する場合もある。
【0024】
また、多段遠心圧縮機50(図1の(a)参照)などの回転機械では、回転体の固有振動モードに対する安定性を評価するため、回転体に発生する軸振動の応答特性を振動特性として測定する振動特性測定が必要になる。
回転体の軸振動に対する安定性は、回転体を加振し、それによって引き起こされる回転体の振動の応答特性を測定することによって評価可能である。
このため、回転体の軸振動に対する安定性を評価するときには、回転している回転体を強制的に振動させて、つまり、加振して、そのときの回転体振動の振幅と位相を測定し、入力(回転体に与える振動)に対する出力(回転体の実際の振動)の応答特性を測定することが実施される。
【0025】
図1の(a)に示すように多段遠心圧縮機50に取り付け可能な、本実施形態に係る振動特性測定装置1は、回転体の軸振動の安定性を評価するために回転体を加振し、さらに、加振された回転体の振動(振幅と位相)を測定し、振動の応答特性を測定する装置である。
このため振動特性測定装置1は、回転軸51を加振する磁気軸受12と回転軸51の振幅(変位)を測定する測定装置(変位センサ13)を含んで構成される。
磁気軸受12は、電磁石12X,12Y(図1の(b)参照)を含んで構成され、図示しないコイルに供給される電流によって発生する磁力で回転軸51を非接触支持することが、軸受としての本来の機能である。
【0026】
図1の(b)に示すように、回転軸51の軸線を法線とする平面上で鉛直上下方向(第2方向とする)にY軸、Y軸と直交する横方向(第1方向とする)にX軸を設定する。この構成によると、X軸の方向(第1方向)は、回転軸51(回転体)の軸線方向と直交する方向であり、Y軸の方向(第2方向)は、回転軸51の軸線方向およびX軸の方向(第1方向)と直交する方向になる。
【0027】
そして、図1の(b)に示すように、回転軸51の回転中心を原点Oとする座標系において、磁気軸受12は、X軸上で回転軸51を横方向に挟むように電磁石12Xが配置され、Y軸上で回転軸51を上下方向に挟むように電磁石12Yが配置される。そして、電磁石12Xに供給する電流を制御することによって回転軸51と電磁石12Xの間隙を調節でき、電磁石12Yに供給する電流を制御することによって回転軸51と電磁石12Yの間隙を調節できる。
さらに、回転軸51と電磁石12Xの間隙を連続的に調節することによって、回転軸51をX軸方向に振動させることができ、回転軸51と電磁石12Yの間隙を連続的に調節することによって、回転軸51をY軸方向に振動させることができる。このようにして磁気軸受12で回転軸51を加振できる。
【0028】
例えば、回転軸51と電磁石12Xの間隙を周期的に調節するように余弦波電流を電磁石12Xに供給し、回転軸51と電磁石12Yの間隙を、回転軸51と電磁石12Xの間隙と同じ周期で位相が90度ずれるように調節する正弦波電流を電磁石12Yに供給すると、軸線を中心として振れ回るように回転軸51を加振できる。
【0029】
図1の(a)に示す変位センサ13は、例えば、振動による回転軸51のX軸方向の変位量を測定するX変位センサ13Xと、Y軸方向の変位量を測定するY変位センサ13Yからなり、X軸方向の変位量とY軸方向の変位量によって回転軸51の振動変位が測定される。変位センサ13の種類は限定されるものではないが、例えば、非接触に回転軸51の変位を測定可能な渦電流式のものを利用できる。
【0030】
従来、振動特性測定装置1は、回転体が回転しているときに磁気軸受12で回転軸51を加振し、変位センサ13で回転軸51のX軸方向とY軸方向の変位量を測定して回転軸51の振動変位を測定するように構成される。
このとき、回転体は回転しているため前記した不釣合い振動が発生している。したがって、回転軸51を加振すると、不釣合い振動に加えて加振による振動(以下、強制振動と称する)が発生し回転体の振幅が増大する。
前記したように、静止体に備わるシール機構55と回転体の接触を回避するため、回転体の振幅は所定の許容値より小さいことが要求される。したがって、不釣合い振動が発生している回転体には、不釣合い振動による振幅と許容値のマージンに相当する振幅が最大となるような振動が入力可能である。
【0031】
換言すると、加振による強制振動の大きさが制限される。つまり、図2の(b)に示すように、不釣合い振動V1の振幅を基準とし、強制振動V2の振幅は基準となる振幅から許容値までのマージン(マージン1)の範囲内に抑えることが要求される。
したがって、強制振動による回転軸51の振幅が小さくなり、変位センサ13が出力する、回転軸51の変位を示す信号(変位信号)のSN比が悪くなる。
【0032】
そこで、本実施形態に係る振動特性測定装置1は、回転している回転軸51に振幅の大きな振動を与え、変位センサ13が出力する変位信号のSN比を良好に維持できるように構成されている。
具体的に、振動特性測定装置1は、図3に示すように釣合せ信号発生装置8を備え、回転体の応答特性の測定時に、一時的に不釣合い振動を解消するように構成される。
【0033】
釣合せ信号発生装置8は、図2の(a)に示すように質量集中点Gに作用する遠心力を打ち消す力を、磁気軸受12の磁力によって連続して発生させることで、遠心力による質量集中点G側への変位を打ち消して回転体の不釣合い振動を解消する。
このように、本実施形態に係る振動特性測定装置1は、図3に示す釣合せ信号発生装置8で回転体の不釣合い振動を解消する信号を発生し、本実施形態における電流供給装置である電流増幅器11(図3参照)に入力する機能を有する。そして、電流増幅器11は入力された信号(不釣合い振動を解消する信号)を所定のゲインで増幅した電流を磁気軸受12に供給する。
【0034】
電流増幅器11から磁気軸受12に供給される電流は、入力された信号が所定のゲインで増幅された電流で、入力された信号と同期していることが好ましい。この構成によって、電流増幅器11から電流が供給される磁気軸受12は、電流増幅器11に入力される信号に応じた磁力を発生することができる。
なお、電流供給装置は、入力される信号に応じた磁力を発生させる電流を磁気軸受12に供給可能な装置であれば、入力される信号を増幅した電流を磁気軸受12に供給する電流増幅器11に限定されない。
【0035】
図3に示す釣合せ信号発生装置8は、いわゆる2相発振器を含んで構成され、その発振周波数は、回転体の回転周波数と同期することが必要とされる。そのため、釣合せ信号発生装置8には回転体の回転速度を示す回転パルス信号Rpが入力される。例えば、図示しない回転速度センサが回転軸51に刻まれた回転基準溝を測定した結果を回転パルス信号Rpとして釣合せ信号発生装置8に入力する構成とすればよい。
そして、釣合せ信号発生装置8には、入力される回転パルス信号Rpを基準信号とするフェーズロックドループ回路(PLL回路)が組み込まれ、回転体の回転周波数に同期した正弦波信号と余弦波信号を発振するように構成されている。PLL回路が発振する正弦波信号と余弦波信号は、位相が90度異なる単一周波数の信号である。
【0036】
また、図3に示すように、釣合せ信号発生装置8には、不釣合い振動の相殺振幅Amと位相Phがそれぞれ入力される。ここでいう位相Phは、回転体の回転角度と図2の(a)に示す質量集中点Gの回転角度のずれを180度遅らせた位相を示す。つまり、回転体が基準の位置(例えば、回転角度が「0」)にあるときの質量集中点Gの回転角度(図2の(a)にθaで示す)を180度遅らせた角度(図2の(a)にθbで示す)とする。
このように質量集中点Gの回転角度から180度遅らせた位相Phとすることで、質量集中点Gに作用する遠心力を打ち消す方向の力を発生させることができる。
また、相殺振幅Amは、質量集中点Gに作用する遠心力を打ち消す量を示す。
【0037】
相殺振幅Amおよび位相Phは、例えば、振動特性測定装置1(図1の(a)参照)の管理者が、多段遠心圧縮機50(図1の(a)参照)の回転体に発生する不釣合い振動を測定することによって取得し、さらに、図示しない入力装置によって入力する値とすればよい。そして、入力された相殺振幅Amおよび位相Phが図示しない記憶部に記憶される構成とすれば、釣合せ信号発生装置8は、必要に応じて相殺振幅Amおよび位相Phを読み出して利用できる。
【0038】
釣合せ信号発生装置8は、PLL回路が発振する余弦波信号と正弦波信号に、相殺振幅Amおよび位相Phを組み合わせ、下式(1a)、(1b)に示すようなX軸方向の発振信号FxとY軸方向の発振信号Fyを、図2の(a)に示すように発生する。
Fx=Am・Cos(Ωt+Ph) (1a)
Fy=Am・Sin(Ωt+Ph) (1b)
なお、Ωは回転体の回転角速度、tは時間を示す。
また、回転角速度Ωは、例えば、入力される回転パルス信号Rpに基づいて算出される値である。
釣合せ信号発生装置8は、このように、振幅がともにAmであって位相が互いに90度ずれた発振信号Fx,Fyを発生する。
このように、釣合せ信号発生装置8は、余弦波成分(Am・Cos(Ωt+Ph))を含んだX軸方向の発振信号Fxと、正弦波成分(Am・Sin(Ωt+Ph))を含んだY軸方向の発振信号Fyを発生する。
【0039】
式(1a)、(1b)に示される発振信号Fx、Fyは釣合せ信号発生装置8から出力され、それぞれ、電流増幅器11のX増幅器11X、Y増幅器11Yに入力される。
X増幅器11Xでは、入力された発振信号Fxを所定のゲインで増幅して電磁石12Xに供給する。また、Y増幅器11Yでは、入力された発振信号Fyを所定のゲイン(例えば、X増幅器11Xのゲインと同等のゲイン)で増幅して電磁石12Yに供給する。X増幅器11X、Y増幅器11Yのゲインは、磁気軸受12の特性や回転体の振動特性に応じ、適宜設定されることが好ましい。
【0040】
電磁石12Xおよび電磁石12Yに電流増幅器11(X増幅器11X,Y増幅器11Y)から出力される電流が供給されると、磁気軸受12には、X軸方向とY軸方向に合成された信号(合成発振信号Fz)が増幅された電流が供給されることになる。この合成発振信号Fzは、複素数表記で次式(2)のように示される。
Fz=Fx+jFy=Am・ej(Ωt+Ph) (2)
なお、jは虚数単位を示す。
【0041】
式(2)より、合成発振信号Fzは、時間tの経過にともなって複素平面上で半径Amの円形に振れる信号であることがわかる。したがって、磁気軸受12で回転体の周囲に互いに直交するように配置される電磁石12X、12Yが、それぞれ発振信号Fx、Fyに応じた磁力を発生すれば、その合成された磁力は、回転体の回転に同期して、回転体の回転中心を中心とする円形に振れる力となる。
【0042】
また、不釣合い振動によって発生し、回転体を変位させる力(以下、不釣合い力と称する)も回転体の回転に同期して回転体の回転中心を中心とする円形に振れる力である。この不釣合い力は、図2の(a)に示す質量集中点Gに作用する遠心力によって発生し、発振信号Fx,Fyの位相Phは、質量集中点Gの回転角度を180度遅らせた角度に相当することから、発振信号Fx,Fyが増幅された余弦波電流や正弦波電流が供給される磁気軸受12で発生する磁力によって、回転体の不釣合い振動を解消できる。
つまり、合成発振信号Fzは、余弦波成分(Am・Cos(Ωt+Ph))をX軸方向の振動を解消する成分、正弦波成分(Am・Sin(Ωt+Ph))をY軸方向の振動を解消する成分とする振動解消信号となる。
釣合せ信号発生装置8は、このように発振信号Fx,Fyを生成し、さらに発振信号Fx,Fyを合成した合成発振信号(振動解消信号)Fzを発生して回転体の不釣合い振動を解消する。
【0043】
また、振動特性測定装置1は、図3に示すように加振応答分析装置9を備える。加振応答分析装置9は、回転体を加振するための加振信号Ex,Eyを発生する。加振信号Exは回転体をX軸方向に加振する制御信号で、加振信号Eyは回転体をY軸方向に加振する制御信号である。そして、加振信号Ex,Eyの少なくとも一方を成分として含む信号を加振制御信号と称する。
この構成によると、加振信号Exは、回転体をX軸方向に加振する、加振制御信号の成分(第1方向加振成分)となり、加振信号Eyは、回転体をY軸方向に加振する、加振制御信号の成分(第2方向加振成分)となる。
【0044】
本実施形態に係る加振応答分析装置9は、例えば任意の振幅の正弦波信号を、それぞれX軸方向の加振信号ExおよびY軸方向の加振信号Eyとして周期を変えながら出力し、電流増幅器11のX増幅器11XとY増幅器11Yに、それぞれ入力する。
正弦波信号である加振信号ExがX増幅器11Xで増幅された電流が電磁石12Xに供給されると、回転体はX軸方向に加振される。また、正弦波信号である加振信号EyがY増幅器11Yで増幅された電流が電磁石12Yに供給されると、回転体はY軸方向に加振される。
【0045】
また、加振応答分析装置9には、変位センサ13が計測する回転体の変位を示す変位信号が入力される。X変位センサ13Xは、回転体のX軸方向の変位を測定して測定結果をX変位信号Mxとして加振応答分析装置9に入力し、Y変位センサ13Yは、回転体のY軸方向の変位を測定して測定結果をY変位信号Myとして加振応答分析装置9に入力する。
【0046】
X軸方向の加振信号Exを正弦波信号とする場合、加振応答分析装置9は、時間経過とともに周期を変えながら加振信号Exを出力し、入力されるX変位信号Mxに基づいて回転体のX軸方向の変位をデータとして取得する。そして、加振信号Ex(正弦波信号)に対する回転体のX軸方向の応答特性(周波数特性)を測定する。
同様に、Y軸方向の加振信号Eyを正弦波信号とする場合、加振応答分析装置9は、時間経過とともに周期を変えながら加振信号Eyを出力し、入力されるY変位信号Myに基づいて回転体のY軸方向の変位をデータとして取得する。そして、加振信号Ey(正弦波信号)に対する回転体のY軸方向の応答特性(周波数特性)を測定する。
このようにして加振応答分析装置9は、回転体に対する入力(X軸方向の加振信号Ex、Y軸方向の加振信号Ey)に対する回転体の出力(X変位信号Mx、Y変位信号My)の応答特性を測定する。
【0047】
例えば、図4の(a)に示すように、X軸方向の応答特性を測定するために加振応答分析装置9が回転体をX軸方向に加振すると、加振している期間(加振実行期間)は、X軸方向の加振信号Exの周期の変化に応じてX軸方向の変位、つまり振幅が変化し、特定の周波数のときに最大振幅となる応答特性が得られる。
しかしながら、加振実行期間においても回転体には不釣合い振動が発生しているため、加振による強制振動の振幅は、不釣合い振動の振幅に重ね合わされた振幅となる。そして、強制振動する回転体の振幅は、加振されていない回転体の振幅より大きくなる。したがって、加振によって回転体に生じさせることのできる振幅は、図2の(b)に示すように(図5に(従来例)として再度示す)、不釣合い振動の振幅と前記した許容値とのマージン1の範囲に制限される。
【0048】
つまり、図5に(従来例)として示すように、不釣合い振動V1の振幅を基準とし、強制振動V2の振幅は基準となる振幅からの増加分として現われる。したがって、強制振動V2の振幅は、基準となる振幅(不釣合い振動V1の振幅)と許容値とのマージン1に相当する振幅に制限される。このことによって、回転体を加振して発生できる振幅が小さくなるように制限される。つまり、強制振動V2の最大振幅が小さくなるように制限され、X変位センサ13Xが最大振幅を測定して出力するX変位信号MxのSN比が悪くなる。そして、加振応答分析装置9が取得するX軸方向の変位のデータの品質が低下する。
同様に、Y軸方向の変位のデータの品質も低下する。
【0049】
そこで、振動特性測定装置1(図1の(a)参照)は、図3に示すように、発振信号Fxと加振信号Exを加算し、発振信号Fyと加振信号Eyを加算する加算器7aを備える。そして、本実施形態においては、釣合せ信号発生装置8、加振応答分析装置9、および加算器7aを含んで、振動特性測定装置1の加振制御装置7とする。
【0050】
振動特性測定装置1は、回転体の応答特性を測定するときには、加振制御装置7の加振応答分析装置9で加振制御信号を発生し、さらに釣合せ信号発生装置8で振動解消信号を発生する。そして、加算器7aで、振動解消信号のX軸方向の発振信号Fxと加振制御信号のX軸方向の加振信号Exを加算した加算信号ADDxを生成する。同様に、振動解消信号のY軸方向の発振信号Fyと加振制御信号のY軸方向の加振信号Eyを加算した加算信号ADDyを生成する。
加算信号ADDxはX増幅器11Xに入力され、加算信号ADDxをX増幅器11Xで増幅した電流が磁気軸受12の電磁石12X(図1の(b)参照)に供給される。
また、加算信号ADDyはY増幅器11Yに入力され、加算信号ADDyをY増幅器11Yで増幅した電流が磁気軸受12の電磁石12Y(図1の(b)参照)に供給される。
【0051】
つまり、加振制御装置7からは、振動解消信号(合成発振信号Fz)と加振制御信号が加算された信号(以下、回転体制御信号と称する)が出力される。
この回転体制御信号は、振動解消信号の余弦波成分と、加振制御信号の第1方向加振成分が加算された成分を含む加算信号ADDx、および振動解消信号の正弦波成分と、加振制御信号の第2方向加振成分が加算された成分を含む加算信号ADDyからなる合成信号である。
加算信号ADDxは、X軸方向の発振信号Fxと加振信号Exが加算された信号であり、回転体のX軸方向の発振信号Fxの成分と、X軸方向の加振信号Exの成分を含んだ加算信号になる。
また加算信号ADDyは、Y軸方向の発振信号Fyと加振信号Eyが加算された信号であり、回転体のY軸方向の発振信号Fyの成分と、Y軸方向の加振信号Eyの成分を含んだ加算信号になる。
【0052】
したがって、加算信号ADDx、ADDyを成分として含む回転体制御信号は、X軸方向の発振信号Fxの成分と、Y軸方向の発振信号Fyの成分と、X軸方向の加振信号Exの成分と、Y軸方向の加振信号Eyの成分を含んだ信号となる。そして、回転体制御信号が電流増幅器11で増幅された電流が磁気軸受12に供給されると、磁気軸受12には、X軸方向の発振信号Fxの成分と、Y軸方向の発振信号Fyの成分と、X軸方向の加振信号Exの成分と、Y軸方向の加振信号Eyの成分と、を含んだ電流が供給される。
【0053】
この構成によると、加振実行期間において、磁気軸受12に供給される電流の発振信号Fx、Fyの成分によって回転体の不釣合い振動が解消し、加振信号Ex、Eyの成分によって回転体がX軸方向およびY軸方向に加振される。したがって、図4の(b)に示すように、加振実行期間でX軸方向に不釣合い振動は発生せず、加振による強制振動のみ発生する。そして、回転体のX軸方向の振幅は強制振動の振幅となる。また、図示はしないが、Y軸方向にも不釣合い振動は発生せず、加振による強制振動のみ発生する。そして、回転体のY軸方向の振幅は強制振動の振幅となる。
このことによって、X変位センサ13X(図3参照)は強制振動のX軸方向の振幅のみを測定し、その測定結果をX変位信号Mx(図3参照)として加振応答分析装置9(図3参照)に入力できる。同様にY変位センサ13Y(図3参照)は強制振動のY軸方向の振幅のみを測定し、その測定結果をY変位信号My(図3参照)として加振応答分析装置9(図3参照)に入力できる。
【0054】
つまり、図5に(本実施形態)として示すように、不釣合い振動の振幅が無い状態、換言すると振幅が「0」の状態を基準とすることができ、強制振動V2の振幅は「0」からの増加分として現われる。したがって、強制振動V2の振幅は、「0」と許容値とのマージン(マージン2)に相当する振幅の範囲内であればよく、回転体を加振して発生できる振幅を広げることができる。また、強制振動V2の最大振幅も「0」と許容値とのマージン2に相当する振幅まで広げることができ、X変位センサ13X(図3参照)が最大振幅を測定して出力するX変位信号Mx(図3参照)のSN比を良くすることができる。同様に、Y変位センサ13Y(図3参照)が最大振幅を測定して出力するY変位信号My(図3参照)のSN比を良くすることができる。
そして、加振応答分析装置9が取得するX軸方向の変位のデータ及びY軸方向の変位のデータの品質を向上できる。
【0055】
なお、振動特性測定装置1は、多段遠心圧縮機50(図1の(a)参照)の回転体のX軸方向の応答特性とY軸方向の応答特性をそれぞれ単独に測定可能な構成とすることもできる。
例えば、X軸方向の応答特性を単独で測定する場合、加振応答分析装置9は、釣合せ信号発生装置8が出力するX軸方向の発振信号Fxと、加振応答分析装置9が出力するX軸方向の加振信号Exを加算した加算信号ADDxをX増幅器11Xに入力する。
さらに、釣合せ信号発生装置8が出力するY軸方向の発振信号FyをY増幅器11Yに入力する。つまり、Y軸方向の加振信号Eyをゼロとする加算信号ADDyをY増幅器11Yに入力する。
このとき、磁気軸受12には、X軸方向の発振信号Fxの成分と、Y軸方向の発振信号Fyの成分と、X軸方向の加振信号Exの成分と、を含んだ電流が供給される。
【0056】
そして、X変位センサ13X(図3参照)は回転体のX軸方向の変位を測定してX変位信号Mx(図3参照)を加振応答分析装置9(図3参照)に入力する。
回転体は磁気軸受12に供給される電流のX軸方向の発振信号Fxの成分によって、X軸方向の不釣合い振動が解消され、X変位センサ13Xは加振によって振動する回転体の振幅を測定できる。
【0057】
同様に、加振応答分析装置9は、釣合せ信号発生装置8が出力するY軸方向の発振信号Fyと、加振応答分析装置9が出力するY軸方向の加振信号Eyを加算した加算信号ADDyをY増幅器11Yに入力する。さらに、X軸方向の加振信号Exをゼロとする加算信号ADDxをX増幅器11Xに入力する。このようにすると、Y変位センサ13Y(図3参照)で回転体のY軸方向の変位を測定できる。
回転体は磁気軸受12に供給される電流のY軸方向の発振信号Fyの成分によって、Y軸方向の不釣合い振動が解消され、Y変位センサ13Yは加振によって振動する回転体の振幅を測定できる。
このように、回転体のX軸方向の応答特性とY軸方向の応答特性をそれぞれ単独に測定可能な構成であってもよい。
【0058】
以上のように、本実施形態に係る振動特性測定装置1(図1の(a)参照)は、多段遠心圧縮機50(図1の(a)参照)に備わる回転体(回転軸51(図1の(a)参照)、遠心羽根車53(図1の(a)参照))の応答特性を測定するとき、釣合せ信号発生装置8(図3参照)が発生する発振信号Fx、Fyと、加振応答分析装置9(図3参照)が発生する加振信号Ex,Eyを加算器7a(図3参照)で加算し、X軸方向の発振信号Fxの成分とX軸方向の加振信号Exの成分を含んだ加算信号ADDx(図3参照)、およびY軸方向の発振信号Fyの成分とY軸方向の加振信号Eyの成分を含んだ加算信号ADDy(図3参照)を生成する。
加算信号ADDx,ADDyは、加振制御装置7(図3参照)からの出力信号として電流増幅器11(X増幅器11X(図3参照),Y増幅器11Y(図3参照))に入力される。
X増幅器11Xは、加算信号ADDxを増幅した電流を磁気軸受12の電磁石12X(図3参照)に供給し、Y増幅器11Yは、加算信号ADDyを増幅した電流を磁気軸受12の電磁石12Y(図3参照)に供給する。
【0059】
回転体は、電磁石12X(図3参照)に供給される電流に含まれるX軸方向の発振信号Fxの成分と、電磁石12Y(図3参照)に供給される電流に含まれるY軸方向の発振信号Fyの成分によって、不釣合い振動が解消する。また、電磁石12Xに供給される電流に含まれるX軸方向の加振信号Exの成分と、電磁石12Yに供給される電流に含まれるY軸方向の加振信号Eyの成分によって加振される。
【0060】
この構成によって、振動特性測定装置1(図1の(a)参照)が、多段遠心圧縮機50(図1の(a)参照)に備わる回転体の応答特性を測定するとき、回転体の不釣合い振動を解消することができる。このことによって、加振による強制振動の振幅の許容範囲を広げることができ、変位センサ13(X変位センサ13X(図3参照)、Y変位センサ13Y(図3参照))が出力するX変位信号MxとY変位信号MyのSN比を良くすることができる。そして、加振応答分析装置9(図3参照)は、X軸方向の変位に関する高品質のデータとY軸方向の変位に関する高品質のデータを取得できる。
【0061】
さらに、取得するデータの品質が高く、数少ないデータで回転体の応答特性を評価することができるため、データの取得に要する時間を短くできる。ひいては、データの取得に要する工数を削減することができ、エネルギの消費量を減らすことができる。
【0062】
なお、加振信号Ex,Eyとしては、前記した正弦波信号のほか、ランダム信号やパルス信号なども考えられる。
加振応答分析装置9が、正弦波信号以外の信号を加振信号として発生する場合も、その加振信号の成分(第1方向加振成分、第2方向加振成分)に発振信号の成分(余弦波成分、正弦波成分)を加算した回転体制御信号を電流増幅器11(図3参照)で増幅した電流を磁気軸受12(図3参照)に供給する構成とすればよい。
【0063】
また、回転体の安定性を評価するために、回転体の振動波形を分析してシステムパラメータを同定する方法もある。例えば、固有振動数の振動を回転体に発生させる周波数の正弦波成分を含む加振信号で回転体を加振し、さらに、回転体が共振状態にあるときに加振信号を瞬時に遮断したときの自由振動波形によってシステムパラメータを同定することが可能である(システム同定の詳細については、例えば、「MATLABによる制御のためのシステム同定(1996年 足立修一著 東京電機大学出版局)」参照)。
【0064】
このようにシステムパラメータを同定する方法の場合にも、固有振動数の振動を回転体に発生させる加振信号に発振信号を加算した回転体制御信号を電流増幅器11(図3参照)で増幅した電流を磁気軸受12(図3参照)に供給する構成とすればよい。さらに、加振信号を遮断した後は回転体が自由振動している間、発振信号Fx、Fyを電流増幅器11で増幅した電流を磁気軸受12に供給する構成とすれば、変位センサ13(図3参照)は、自由振動している回転体の変位を、不釣合い振動の影響を受けることなく測定できる。
【0065】
なお、振動特性測定装置1の設計変更例として、例えば、図6に示すように、加算器7aから出力される加算信号ADDx、ADDyの出力を遮断する加振信号遮断器10を有する加振制御装置7を備える構成であってもよい。
加振信号遮断器10には、X変位センサ13Xが出力するX変位信号MxとY変位センサ13Yが出力するY変位信号Myが入力される。
そして加振信号遮断器10は、X変位信号Mxに基づいて算出される回転体のX軸方向の変位、またはY変位信号Myに基づいて算出される回転体のY軸方向の変位の少なくとも一方が所定の閾値を超えたときに、加算信号ADDx、ADDyの信号の出力を遮断するように構成される。
【0066】
この構成によると、例えば、加算信号ADDx、ADDyの加振信号Ex,Eyの成分による加振によって、X軸方向の変位、またはY軸方向の変位が所定の閾値を超えたとき、すなわち、回転体の振幅が許容値をこえたときに、加算信号ADDx、ADDyが電流増幅器11で増幅された電流の、磁気軸受12への供給が遮断される。したがって、回転体に発生している、許容値を超えた振幅での振動を収束させることができ、例えば、シール機構55(図1の(a)参照)が損傷することを防止できる。
【0067】
なお、図示はしないが、加振信号遮断器10を、加振応答分析装置9と加算器7aの間に配置する構成とすれば、回転体の振幅が許容値を超えたときに加振応答分析装置9が出力する加振信号Ex,Eyの加算器7aへの入力を遮断できる。したがって、加振制御装置7から発振信号Fx、Fyのみが出力され、発振信号Fx、Fyを電流増幅器11で増幅した電流が磁気軸受12に供給される。
この構成によると、回転体に発生している、許容値を超えた振幅での振動をより速やかに収束させることができる。
【符号の説明】
【0068】
1 振動特性測定装置
7 加振制御装置
8 釣合せ信号発生装置
9 加振応答分析装置
10 加振信号遮断器
11 電流増幅器(電流供給装置)
12 磁気軸受
13 変位センサ(測定装置)
50 多段遠心圧縮機(回転機械)
51 回転軸(回転体)
52a,52b,52c 軸受部材
53 遠心羽根車(回転体)
54 ハウジング(静止体)
55 シール機構
ADDx,ADDy 加算信号(回転体制御信号)
Ex,Ey 加振信号(加振制御信号)
Fx,Fy 発振信号
Fz 振動解消信号
【技術分野】
【0001】
本発明は、多段遠心圧縮機など、回転機械の回転軸の振動特性を測定する振動特性測定装置と振動特性測定方法に関する。
【背景技術】
【0002】
油田、天然ガスプラント、石油化学プラント等に配置されて各種ガスや液体などの被圧縮流体を圧縮する多段遠心圧縮機は、複数段からなる遠心羽根車を回転軸とともに回転させ、遠心力によって被圧縮流体を圧縮する回転機械である。
このような多段遠心圧縮機には、遠心羽根車の各段からの被圧縮流体の漏れを防止するために、回転軸の軸線を中心とする環状のシール部材を含んで構成されるシール機構が備わっている。
多段遠心圧縮機に備わるシール機構では被圧縮流体の漏れ流れによる不安定化力が発生し、この不安定化力が回転軸や遠心羽根車の回転の安定性に影響を与える。つまり、不安定化力が安定化力を上回ると、シールホワールと呼ばれる自励振動が発生する。
【0003】
したがって、回転機械は、シール機構に発生する不安定化力に対して充分に大きな安定化力を発生するように設計されることが重要になる。このために、回転軸を含む回転体の振動特性を測定してその特性を把握し、振動特性に基づいて安定性を評価することが必要である。
【0004】
例えば、特許文献1には、軸受部に振動を与え、その振動によって回転軸に生じる振動を解析することによって、運転中の回転機械の振動特性を実測する技術が開示されている。また、非特許文献1には、圧縮機の回転軸の軸端に能動型のラジアル磁気軸受を取り付け、この磁気軸受に励磁電流を供給して回転軸を加振し、回転軸の振動特性を実測する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平5−5057号公報
【非特許文献】
【0006】
【非特許文献1】Pettinato、他2名、「Shop Acceptance Testing of Compressor Rotordynamic Stability and Theoretical Correlation」、第39回ターボマシナリシンポジウム、テキサス、2011年、31頁〜42頁
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1や非特許文献1に記載される技術は、回転している回転軸を加振し、回転軸の振動(振幅と位相)を測定することによって、回転軸の振動特性を測定する技術である。
このように回転軸など回転体の振動特性を測定する場合、ばらつきの少ない高品質なデータを取得するためには、加振振幅が大きいことが好ましい。加振によって振動する回転体の振幅を大きくすることによって、振動を測定するセンサが出力する信号のSN比を向上でき、振幅を示すデータとして高品質なデータを取得できる。
【0008】
一方、回転している回転体の振幅が加振によって増大したときに、設計値として決定される許容値を超えた振幅になると、例えば回転体とシール機構が接触してシール機構に備わるシール部材が磨耗するなどの問題が発生する。したがって、回転体に発生する振幅が許容値を超えない範囲で加振する必要がある。
しかしながら、回転機械の回転体は質量の偏りなどによって、通常の回転時にも許容値を超えない振幅の範囲で振動している。したがって、回転中の回転体への加振によって発生させることのできる振動の振幅は、通常の回転時における振動の振幅と許容値のマージンの範囲内に制限される。換言すると、加振によって回転軸に発生できる振動が小さく抑えられることになり、振動を測定するセンサが出力する信号のSN比が悪くなる。そして、この信号に基づいて取得されるデータ(回転軸の振動特性を示すデータ)の品質が低下するという問題がある。
【0009】
例えば取得したデータの品質が悪い場合、取得するデータ数を大幅に増やして平均化処理することによって、振動解析することが可能である。
しかしながら、平均化処理をするために大量のデータを取得すると、データの取得に時間がかかり工数が増大するという問題がある。また、大量のデータを取得するために回転軸の運転時間や加振する時間が長くなり、エネルギの消費量が増えるという問題もある。
【0010】
そこで、本発明は、振動特性の測定時に、許容値を超えることなく回転体を振動させ、エネルギの消費量を増やすことなく高品質のデータを取得可能な振動特性測定装置および振動特性測定方法を提供することを課題とする。
【課題を解決するための手段】
【0011】
前記課題を解決するため本発明は、回転機械の回転体を非接触支持する磁気軸受と、前記回転体が振動するときの振幅を測定する測定装置と、前記磁気軸受に電流を供給する電流供給装置と、前記回転体を加振するように前記磁気軸受を制御する加振制御信号を出力するとともに、前記測定装置が測定する前記振幅に基づいて、前記加振制御信号に対する前記回転体の振動の前記加振制御信号に対する応答特性を測定する加振制御装置と、を備える振動特性測定装置とする。そして、前記加振制御装置は前記応答特性を測定するときに、前記回転体が回転するときに発生する不釣合い振動を前記磁気軸受で解消するための振動解消信号を前記加振制御信号に加算した回転体制御信号を出力し、前記電流供給装置は、前記回転体制御信号に応じた磁力を発生させる電流を前記磁気軸受に供給することを特徴とする。また、この振動特性測定装置における振動特性測定方法とする。
【発明の効果】
【0012】
本発明によると、振動特性の測定時に、許容値を超えることなく回転体を振動させ、エネルギの消費量を増やすことなく高品質のデータを取得可能な振動特性測定装置および振動特性測定方法を提供できる。
そして、軸受やシール機構の損傷やシール機構の磨耗などの不具合を生じさせることなく振動特性を測定できる。
【図面の簡単な説明】
【0013】
【図1】(a)は本実施形態に係る振動特性測定装置を取り付けた多段遠心圧縮機を側面から見た概略構成図、(b)は振動特性測定装置の磁気軸受と多段遠心圧縮機の回転軸をAの方向から見た概略図である。
【図2】(a)は回転軸の不釣合い振動をモデル化した図、(b)は回転軸の振幅と許容値のマージンを説明するための図である。
【図3】振動特性測定装置の機能ブロックを示す図である。
【図4】(a)は従来の振動特性測定装置で加振したときの回転軸のX軸方向の振幅を示す図、(b)は本実施形態に係る振動特性測定装置で加振したときの回転軸のX軸方向の振幅を示す図である。
【図5】回転軸の振幅と許容値のマージンを従来例と本実施形態で比較する図である。
【図6】加振信号遮断器を有する加振制御装置を備える振動特性測定装置の機能ブロックを示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について、適宜図を参照して詳細に説明する。
図1の(a)に示すように、本実施形態に係る振動特性測定装置1は、多段遠心圧縮機50などの回転機械に取り付けられて回転軸51や遠心羽根車53を含む回転体の振動特性を測定可能な装置である。
本実施形態に係る振動特性測定装置1は多段遠心圧縮機50に限定されず、回転軸51などの回転体を有する回転機械(タービン、電動機等)に取り付け可能であるが、以下では多段遠心圧縮機50に取り付けられる一例を説明する。
【0015】
図1の(a)に示すように構成される多段遠心圧縮機50は、ガスなどの被圧縮流体を、回転軸51とともに回転する遠心羽根車53の遠心力で連続的に圧縮する装置であり、回転軸51は図示しない駆動源(電動機等)によって回転駆動する。
【0016】
遠心羽根車53は、回転軸51の軸方向に多段に備わって回転軸51とともに回転し、中心側(回転軸51側)から吸込んだ被圧縮流体を圧縮して遠心力で外周から吐出するように構成されている。
【0017】
回転軸51は、複数の軸受部材に回転可能に支持される。例えば、遠心羽根車53を軸方向に挟むように2箇所に備わる軸受部材52a、52bによって回転軸51はラジアル方向に支持される。また、回転軸51をアキシャル方向に支持する軸受部材52cによって、回転軸51の軸方向への変動が規制される。
このように回転軸51は複数の軸受部材52a〜52cによって回転可能に支持されている。
【0018】
また、遠心羽根車53は、静止体であるハウジング54に収納され、入口部54aから取り込まれる被圧縮流体が多段の遠心羽根車53によって圧縮されて出口部54bから吐出するように構成される。
以下、回転軸51や遠心羽根車53を含み、回転軸51と一体に回転する構造物を総称して「回転体」と記載する場合がある。また、回転体に対して静止している構造物(ハウジング54等)を総称して「静止体」と記載する場合がある。
【0019】
このように構成される多段遠心圧縮機50では、ハウジング54の入口部54aから取り込まれた被圧縮流体が遠心羽根車53を通ることなくハウジング54から吐出されると、被圧縮流体が圧縮されない状態で出口部54bから吐出されることになり、多段遠心圧縮機50の圧縮効率が低下する。そこで圧縮効率を向上するため、ハウジング54(静止体)と、回転軸51や遠心羽根車53(回転体)の間隙をシールするように適宜シール機構55が備わっている。
【0020】
シール機構55は、例えば、遠心羽根車53の上流段(入口部54a側)から、遠心羽根車53とハウジング54の間隙を通って下流段(出口部54b側)に流れ込むことを防止するために、ハウジング54と遠心羽根車53の間隙をシールするように備わっている。
また、遠心羽根車53の軸方向の両端部には、ハウジング54と回転軸51の間隙をシールするためのシール機構55が備わっている。
【0021】
このように適宜備わるシール機構55は、静止体と回転体の間に微小なクリアランスが形成されるように備わるシール部材(図示せず)を有し、被圧縮流体の流れを妨げるように構成される。
また、クリアランスが形成されることによって、例えば静止体に備わるシール機構55のシール部材が回転体と接触することが防止され、シール部材の磨耗が抑制される。
なお、図1には、シール機構55が静止体(ハウジング54)に備わる構成が図示されているが、シール機構55が回転体(回転軸51、遠心羽根車53等)に備わる構成であってもよい。また、シール機構55が、ハウジング54以外の静止体に備わる場合もある。
【0022】
回転軸51や遠心羽根車53などを含んで構成される回転体は、周方向の質量が均一ではなく回転するときに微小な振動(不釣合い振動)が発生する。
回転体の質量が周方向に均一でない場合、図2の(a)示すように、周方向の1点が質量の集中点(質量集中点G)となるように回転体をモデル化することができる。質量集中点Gを有する回転体が回転すると質量集中点Gには遠心力が作用して外方に引き寄せられ、回転体は質量集中点Gの方に変位する。このような変位が回転体の回転にともなって連続的に発生し、不釣合い振動が発生する。
なお、図2の(a)に示す12X,12Yは、回転軸51を非接触支持するように振動特性測定装置1(図1の(a)参照)に備わる磁気軸受12の電磁石である。
【0023】
このように、回転体には不釣合い振動が発生するため、静止体に備わるシール機構55は不釣合い振動が発生した場合であっても回転体と接触しないようにクリアランスが形成されていることが好ましいが、クリアランスが大きくなると被圧縮流体の流れを妨げるシール性能が低下する。
そこで、回転体の不釣合い振動を常に監視し、その振幅が所定の許容値を超えないように回転体の運転を管理する場合もある。
【0024】
また、多段遠心圧縮機50(図1の(a)参照)などの回転機械では、回転体の固有振動モードに対する安定性を評価するため、回転体に発生する軸振動の応答特性を振動特性として測定する振動特性測定が必要になる。
回転体の軸振動に対する安定性は、回転体を加振し、それによって引き起こされる回転体の振動の応答特性を測定することによって評価可能である。
このため、回転体の軸振動に対する安定性を評価するときには、回転している回転体を強制的に振動させて、つまり、加振して、そのときの回転体振動の振幅と位相を測定し、入力(回転体に与える振動)に対する出力(回転体の実際の振動)の応答特性を測定することが実施される。
【0025】
図1の(a)に示すように多段遠心圧縮機50に取り付け可能な、本実施形態に係る振動特性測定装置1は、回転体の軸振動の安定性を評価するために回転体を加振し、さらに、加振された回転体の振動(振幅と位相)を測定し、振動の応答特性を測定する装置である。
このため振動特性測定装置1は、回転軸51を加振する磁気軸受12と回転軸51の振幅(変位)を測定する測定装置(変位センサ13)を含んで構成される。
磁気軸受12は、電磁石12X,12Y(図1の(b)参照)を含んで構成され、図示しないコイルに供給される電流によって発生する磁力で回転軸51を非接触支持することが、軸受としての本来の機能である。
【0026】
図1の(b)に示すように、回転軸51の軸線を法線とする平面上で鉛直上下方向(第2方向とする)にY軸、Y軸と直交する横方向(第1方向とする)にX軸を設定する。この構成によると、X軸の方向(第1方向)は、回転軸51(回転体)の軸線方向と直交する方向であり、Y軸の方向(第2方向)は、回転軸51の軸線方向およびX軸の方向(第1方向)と直交する方向になる。
【0027】
そして、図1の(b)に示すように、回転軸51の回転中心を原点Oとする座標系において、磁気軸受12は、X軸上で回転軸51を横方向に挟むように電磁石12Xが配置され、Y軸上で回転軸51を上下方向に挟むように電磁石12Yが配置される。そして、電磁石12Xに供給する電流を制御することによって回転軸51と電磁石12Xの間隙を調節でき、電磁石12Yに供給する電流を制御することによって回転軸51と電磁石12Yの間隙を調節できる。
さらに、回転軸51と電磁石12Xの間隙を連続的に調節することによって、回転軸51をX軸方向に振動させることができ、回転軸51と電磁石12Yの間隙を連続的に調節することによって、回転軸51をY軸方向に振動させることができる。このようにして磁気軸受12で回転軸51を加振できる。
【0028】
例えば、回転軸51と電磁石12Xの間隙を周期的に調節するように余弦波電流を電磁石12Xに供給し、回転軸51と電磁石12Yの間隙を、回転軸51と電磁石12Xの間隙と同じ周期で位相が90度ずれるように調節する正弦波電流を電磁石12Yに供給すると、軸線を中心として振れ回るように回転軸51を加振できる。
【0029】
図1の(a)に示す変位センサ13は、例えば、振動による回転軸51のX軸方向の変位量を測定するX変位センサ13Xと、Y軸方向の変位量を測定するY変位センサ13Yからなり、X軸方向の変位量とY軸方向の変位量によって回転軸51の振動変位が測定される。変位センサ13の種類は限定されるものではないが、例えば、非接触に回転軸51の変位を測定可能な渦電流式のものを利用できる。
【0030】
従来、振動特性測定装置1は、回転体が回転しているときに磁気軸受12で回転軸51を加振し、変位センサ13で回転軸51のX軸方向とY軸方向の変位量を測定して回転軸51の振動変位を測定するように構成される。
このとき、回転体は回転しているため前記した不釣合い振動が発生している。したがって、回転軸51を加振すると、不釣合い振動に加えて加振による振動(以下、強制振動と称する)が発生し回転体の振幅が増大する。
前記したように、静止体に備わるシール機構55と回転体の接触を回避するため、回転体の振幅は所定の許容値より小さいことが要求される。したがって、不釣合い振動が発生している回転体には、不釣合い振動による振幅と許容値のマージンに相当する振幅が最大となるような振動が入力可能である。
【0031】
換言すると、加振による強制振動の大きさが制限される。つまり、図2の(b)に示すように、不釣合い振動V1の振幅を基準とし、強制振動V2の振幅は基準となる振幅から許容値までのマージン(マージン1)の範囲内に抑えることが要求される。
したがって、強制振動による回転軸51の振幅が小さくなり、変位センサ13が出力する、回転軸51の変位を示す信号(変位信号)のSN比が悪くなる。
【0032】
そこで、本実施形態に係る振動特性測定装置1は、回転している回転軸51に振幅の大きな振動を与え、変位センサ13が出力する変位信号のSN比を良好に維持できるように構成されている。
具体的に、振動特性測定装置1は、図3に示すように釣合せ信号発生装置8を備え、回転体の応答特性の測定時に、一時的に不釣合い振動を解消するように構成される。
【0033】
釣合せ信号発生装置8は、図2の(a)に示すように質量集中点Gに作用する遠心力を打ち消す力を、磁気軸受12の磁力によって連続して発生させることで、遠心力による質量集中点G側への変位を打ち消して回転体の不釣合い振動を解消する。
このように、本実施形態に係る振動特性測定装置1は、図3に示す釣合せ信号発生装置8で回転体の不釣合い振動を解消する信号を発生し、本実施形態における電流供給装置である電流増幅器11(図3参照)に入力する機能を有する。そして、電流増幅器11は入力された信号(不釣合い振動を解消する信号)を所定のゲインで増幅した電流を磁気軸受12に供給する。
【0034】
電流増幅器11から磁気軸受12に供給される電流は、入力された信号が所定のゲインで増幅された電流で、入力された信号と同期していることが好ましい。この構成によって、電流増幅器11から電流が供給される磁気軸受12は、電流増幅器11に入力される信号に応じた磁力を発生することができる。
なお、電流供給装置は、入力される信号に応じた磁力を発生させる電流を磁気軸受12に供給可能な装置であれば、入力される信号を増幅した電流を磁気軸受12に供給する電流増幅器11に限定されない。
【0035】
図3に示す釣合せ信号発生装置8は、いわゆる2相発振器を含んで構成され、その発振周波数は、回転体の回転周波数と同期することが必要とされる。そのため、釣合せ信号発生装置8には回転体の回転速度を示す回転パルス信号Rpが入力される。例えば、図示しない回転速度センサが回転軸51に刻まれた回転基準溝を測定した結果を回転パルス信号Rpとして釣合せ信号発生装置8に入力する構成とすればよい。
そして、釣合せ信号発生装置8には、入力される回転パルス信号Rpを基準信号とするフェーズロックドループ回路(PLL回路)が組み込まれ、回転体の回転周波数に同期した正弦波信号と余弦波信号を発振するように構成されている。PLL回路が発振する正弦波信号と余弦波信号は、位相が90度異なる単一周波数の信号である。
【0036】
また、図3に示すように、釣合せ信号発生装置8には、不釣合い振動の相殺振幅Amと位相Phがそれぞれ入力される。ここでいう位相Phは、回転体の回転角度と図2の(a)に示す質量集中点Gの回転角度のずれを180度遅らせた位相を示す。つまり、回転体が基準の位置(例えば、回転角度が「0」)にあるときの質量集中点Gの回転角度(図2の(a)にθaで示す)を180度遅らせた角度(図2の(a)にθbで示す)とする。
このように質量集中点Gの回転角度から180度遅らせた位相Phとすることで、質量集中点Gに作用する遠心力を打ち消す方向の力を発生させることができる。
また、相殺振幅Amは、質量集中点Gに作用する遠心力を打ち消す量を示す。
【0037】
相殺振幅Amおよび位相Phは、例えば、振動特性測定装置1(図1の(a)参照)の管理者が、多段遠心圧縮機50(図1の(a)参照)の回転体に発生する不釣合い振動を測定することによって取得し、さらに、図示しない入力装置によって入力する値とすればよい。そして、入力された相殺振幅Amおよび位相Phが図示しない記憶部に記憶される構成とすれば、釣合せ信号発生装置8は、必要に応じて相殺振幅Amおよび位相Phを読み出して利用できる。
【0038】
釣合せ信号発生装置8は、PLL回路が発振する余弦波信号と正弦波信号に、相殺振幅Amおよび位相Phを組み合わせ、下式(1a)、(1b)に示すようなX軸方向の発振信号FxとY軸方向の発振信号Fyを、図2の(a)に示すように発生する。
Fx=Am・Cos(Ωt+Ph) (1a)
Fy=Am・Sin(Ωt+Ph) (1b)
なお、Ωは回転体の回転角速度、tは時間を示す。
また、回転角速度Ωは、例えば、入力される回転パルス信号Rpに基づいて算出される値である。
釣合せ信号発生装置8は、このように、振幅がともにAmであって位相が互いに90度ずれた発振信号Fx,Fyを発生する。
このように、釣合せ信号発生装置8は、余弦波成分(Am・Cos(Ωt+Ph))を含んだX軸方向の発振信号Fxと、正弦波成分(Am・Sin(Ωt+Ph))を含んだY軸方向の発振信号Fyを発生する。
【0039】
式(1a)、(1b)に示される発振信号Fx、Fyは釣合せ信号発生装置8から出力され、それぞれ、電流増幅器11のX増幅器11X、Y増幅器11Yに入力される。
X増幅器11Xでは、入力された発振信号Fxを所定のゲインで増幅して電磁石12Xに供給する。また、Y増幅器11Yでは、入力された発振信号Fyを所定のゲイン(例えば、X増幅器11Xのゲインと同等のゲイン)で増幅して電磁石12Yに供給する。X増幅器11X、Y増幅器11Yのゲインは、磁気軸受12の特性や回転体の振動特性に応じ、適宜設定されることが好ましい。
【0040】
電磁石12Xおよび電磁石12Yに電流増幅器11(X増幅器11X,Y増幅器11Y)から出力される電流が供給されると、磁気軸受12には、X軸方向とY軸方向に合成された信号(合成発振信号Fz)が増幅された電流が供給されることになる。この合成発振信号Fzは、複素数表記で次式(2)のように示される。
Fz=Fx+jFy=Am・ej(Ωt+Ph) (2)
なお、jは虚数単位を示す。
【0041】
式(2)より、合成発振信号Fzは、時間tの経過にともなって複素平面上で半径Amの円形に振れる信号であることがわかる。したがって、磁気軸受12で回転体の周囲に互いに直交するように配置される電磁石12X、12Yが、それぞれ発振信号Fx、Fyに応じた磁力を発生すれば、その合成された磁力は、回転体の回転に同期して、回転体の回転中心を中心とする円形に振れる力となる。
【0042】
また、不釣合い振動によって発生し、回転体を変位させる力(以下、不釣合い力と称する)も回転体の回転に同期して回転体の回転中心を中心とする円形に振れる力である。この不釣合い力は、図2の(a)に示す質量集中点Gに作用する遠心力によって発生し、発振信号Fx,Fyの位相Phは、質量集中点Gの回転角度を180度遅らせた角度に相当することから、発振信号Fx,Fyが増幅された余弦波電流や正弦波電流が供給される磁気軸受12で発生する磁力によって、回転体の不釣合い振動を解消できる。
つまり、合成発振信号Fzは、余弦波成分(Am・Cos(Ωt+Ph))をX軸方向の振動を解消する成分、正弦波成分(Am・Sin(Ωt+Ph))をY軸方向の振動を解消する成分とする振動解消信号となる。
釣合せ信号発生装置8は、このように発振信号Fx,Fyを生成し、さらに発振信号Fx,Fyを合成した合成発振信号(振動解消信号)Fzを発生して回転体の不釣合い振動を解消する。
【0043】
また、振動特性測定装置1は、図3に示すように加振応答分析装置9を備える。加振応答分析装置9は、回転体を加振するための加振信号Ex,Eyを発生する。加振信号Exは回転体をX軸方向に加振する制御信号で、加振信号Eyは回転体をY軸方向に加振する制御信号である。そして、加振信号Ex,Eyの少なくとも一方を成分として含む信号を加振制御信号と称する。
この構成によると、加振信号Exは、回転体をX軸方向に加振する、加振制御信号の成分(第1方向加振成分)となり、加振信号Eyは、回転体をY軸方向に加振する、加振制御信号の成分(第2方向加振成分)となる。
【0044】
本実施形態に係る加振応答分析装置9は、例えば任意の振幅の正弦波信号を、それぞれX軸方向の加振信号ExおよびY軸方向の加振信号Eyとして周期を変えながら出力し、電流増幅器11のX増幅器11XとY増幅器11Yに、それぞれ入力する。
正弦波信号である加振信号ExがX増幅器11Xで増幅された電流が電磁石12Xに供給されると、回転体はX軸方向に加振される。また、正弦波信号である加振信号EyがY増幅器11Yで増幅された電流が電磁石12Yに供給されると、回転体はY軸方向に加振される。
【0045】
また、加振応答分析装置9には、変位センサ13が計測する回転体の変位を示す変位信号が入力される。X変位センサ13Xは、回転体のX軸方向の変位を測定して測定結果をX変位信号Mxとして加振応答分析装置9に入力し、Y変位センサ13Yは、回転体のY軸方向の変位を測定して測定結果をY変位信号Myとして加振応答分析装置9に入力する。
【0046】
X軸方向の加振信号Exを正弦波信号とする場合、加振応答分析装置9は、時間経過とともに周期を変えながら加振信号Exを出力し、入力されるX変位信号Mxに基づいて回転体のX軸方向の変位をデータとして取得する。そして、加振信号Ex(正弦波信号)に対する回転体のX軸方向の応答特性(周波数特性)を測定する。
同様に、Y軸方向の加振信号Eyを正弦波信号とする場合、加振応答分析装置9は、時間経過とともに周期を変えながら加振信号Eyを出力し、入力されるY変位信号Myに基づいて回転体のY軸方向の変位をデータとして取得する。そして、加振信号Ey(正弦波信号)に対する回転体のY軸方向の応答特性(周波数特性)を測定する。
このようにして加振応答分析装置9は、回転体に対する入力(X軸方向の加振信号Ex、Y軸方向の加振信号Ey)に対する回転体の出力(X変位信号Mx、Y変位信号My)の応答特性を測定する。
【0047】
例えば、図4の(a)に示すように、X軸方向の応答特性を測定するために加振応答分析装置9が回転体をX軸方向に加振すると、加振している期間(加振実行期間)は、X軸方向の加振信号Exの周期の変化に応じてX軸方向の変位、つまり振幅が変化し、特定の周波数のときに最大振幅となる応答特性が得られる。
しかしながら、加振実行期間においても回転体には不釣合い振動が発生しているため、加振による強制振動の振幅は、不釣合い振動の振幅に重ね合わされた振幅となる。そして、強制振動する回転体の振幅は、加振されていない回転体の振幅より大きくなる。したがって、加振によって回転体に生じさせることのできる振幅は、図2の(b)に示すように(図5に(従来例)として再度示す)、不釣合い振動の振幅と前記した許容値とのマージン1の範囲に制限される。
【0048】
つまり、図5に(従来例)として示すように、不釣合い振動V1の振幅を基準とし、強制振動V2の振幅は基準となる振幅からの増加分として現われる。したがって、強制振動V2の振幅は、基準となる振幅(不釣合い振動V1の振幅)と許容値とのマージン1に相当する振幅に制限される。このことによって、回転体を加振して発生できる振幅が小さくなるように制限される。つまり、強制振動V2の最大振幅が小さくなるように制限され、X変位センサ13Xが最大振幅を測定して出力するX変位信号MxのSN比が悪くなる。そして、加振応答分析装置9が取得するX軸方向の変位のデータの品質が低下する。
同様に、Y軸方向の変位のデータの品質も低下する。
【0049】
そこで、振動特性測定装置1(図1の(a)参照)は、図3に示すように、発振信号Fxと加振信号Exを加算し、発振信号Fyと加振信号Eyを加算する加算器7aを備える。そして、本実施形態においては、釣合せ信号発生装置8、加振応答分析装置9、および加算器7aを含んで、振動特性測定装置1の加振制御装置7とする。
【0050】
振動特性測定装置1は、回転体の応答特性を測定するときには、加振制御装置7の加振応答分析装置9で加振制御信号を発生し、さらに釣合せ信号発生装置8で振動解消信号を発生する。そして、加算器7aで、振動解消信号のX軸方向の発振信号Fxと加振制御信号のX軸方向の加振信号Exを加算した加算信号ADDxを生成する。同様に、振動解消信号のY軸方向の発振信号Fyと加振制御信号のY軸方向の加振信号Eyを加算した加算信号ADDyを生成する。
加算信号ADDxはX増幅器11Xに入力され、加算信号ADDxをX増幅器11Xで増幅した電流が磁気軸受12の電磁石12X(図1の(b)参照)に供給される。
また、加算信号ADDyはY増幅器11Yに入力され、加算信号ADDyをY増幅器11Yで増幅した電流が磁気軸受12の電磁石12Y(図1の(b)参照)に供給される。
【0051】
つまり、加振制御装置7からは、振動解消信号(合成発振信号Fz)と加振制御信号が加算された信号(以下、回転体制御信号と称する)が出力される。
この回転体制御信号は、振動解消信号の余弦波成分と、加振制御信号の第1方向加振成分が加算された成分を含む加算信号ADDx、および振動解消信号の正弦波成分と、加振制御信号の第2方向加振成分が加算された成分を含む加算信号ADDyからなる合成信号である。
加算信号ADDxは、X軸方向の発振信号Fxと加振信号Exが加算された信号であり、回転体のX軸方向の発振信号Fxの成分と、X軸方向の加振信号Exの成分を含んだ加算信号になる。
また加算信号ADDyは、Y軸方向の発振信号Fyと加振信号Eyが加算された信号であり、回転体のY軸方向の発振信号Fyの成分と、Y軸方向の加振信号Eyの成分を含んだ加算信号になる。
【0052】
したがって、加算信号ADDx、ADDyを成分として含む回転体制御信号は、X軸方向の発振信号Fxの成分と、Y軸方向の発振信号Fyの成分と、X軸方向の加振信号Exの成分と、Y軸方向の加振信号Eyの成分を含んだ信号となる。そして、回転体制御信号が電流増幅器11で増幅された電流が磁気軸受12に供給されると、磁気軸受12には、X軸方向の発振信号Fxの成分と、Y軸方向の発振信号Fyの成分と、X軸方向の加振信号Exの成分と、Y軸方向の加振信号Eyの成分と、を含んだ電流が供給される。
【0053】
この構成によると、加振実行期間において、磁気軸受12に供給される電流の発振信号Fx、Fyの成分によって回転体の不釣合い振動が解消し、加振信号Ex、Eyの成分によって回転体がX軸方向およびY軸方向に加振される。したがって、図4の(b)に示すように、加振実行期間でX軸方向に不釣合い振動は発生せず、加振による強制振動のみ発生する。そして、回転体のX軸方向の振幅は強制振動の振幅となる。また、図示はしないが、Y軸方向にも不釣合い振動は発生せず、加振による強制振動のみ発生する。そして、回転体のY軸方向の振幅は強制振動の振幅となる。
このことによって、X変位センサ13X(図3参照)は強制振動のX軸方向の振幅のみを測定し、その測定結果をX変位信号Mx(図3参照)として加振応答分析装置9(図3参照)に入力できる。同様にY変位センサ13Y(図3参照)は強制振動のY軸方向の振幅のみを測定し、その測定結果をY変位信号My(図3参照)として加振応答分析装置9(図3参照)に入力できる。
【0054】
つまり、図5に(本実施形態)として示すように、不釣合い振動の振幅が無い状態、換言すると振幅が「0」の状態を基準とすることができ、強制振動V2の振幅は「0」からの増加分として現われる。したがって、強制振動V2の振幅は、「0」と許容値とのマージン(マージン2)に相当する振幅の範囲内であればよく、回転体を加振して発生できる振幅を広げることができる。また、強制振動V2の最大振幅も「0」と許容値とのマージン2に相当する振幅まで広げることができ、X変位センサ13X(図3参照)が最大振幅を測定して出力するX変位信号Mx(図3参照)のSN比を良くすることができる。同様に、Y変位センサ13Y(図3参照)が最大振幅を測定して出力するY変位信号My(図3参照)のSN比を良くすることができる。
そして、加振応答分析装置9が取得するX軸方向の変位のデータ及びY軸方向の変位のデータの品質を向上できる。
【0055】
なお、振動特性測定装置1は、多段遠心圧縮機50(図1の(a)参照)の回転体のX軸方向の応答特性とY軸方向の応答特性をそれぞれ単独に測定可能な構成とすることもできる。
例えば、X軸方向の応答特性を単独で測定する場合、加振応答分析装置9は、釣合せ信号発生装置8が出力するX軸方向の発振信号Fxと、加振応答分析装置9が出力するX軸方向の加振信号Exを加算した加算信号ADDxをX増幅器11Xに入力する。
さらに、釣合せ信号発生装置8が出力するY軸方向の発振信号FyをY増幅器11Yに入力する。つまり、Y軸方向の加振信号Eyをゼロとする加算信号ADDyをY増幅器11Yに入力する。
このとき、磁気軸受12には、X軸方向の発振信号Fxの成分と、Y軸方向の発振信号Fyの成分と、X軸方向の加振信号Exの成分と、を含んだ電流が供給される。
【0056】
そして、X変位センサ13X(図3参照)は回転体のX軸方向の変位を測定してX変位信号Mx(図3参照)を加振応答分析装置9(図3参照)に入力する。
回転体は磁気軸受12に供給される電流のX軸方向の発振信号Fxの成分によって、X軸方向の不釣合い振動が解消され、X変位センサ13Xは加振によって振動する回転体の振幅を測定できる。
【0057】
同様に、加振応答分析装置9は、釣合せ信号発生装置8が出力するY軸方向の発振信号Fyと、加振応答分析装置9が出力するY軸方向の加振信号Eyを加算した加算信号ADDyをY増幅器11Yに入力する。さらに、X軸方向の加振信号Exをゼロとする加算信号ADDxをX増幅器11Xに入力する。このようにすると、Y変位センサ13Y(図3参照)で回転体のY軸方向の変位を測定できる。
回転体は磁気軸受12に供給される電流のY軸方向の発振信号Fyの成分によって、Y軸方向の不釣合い振動が解消され、Y変位センサ13Yは加振によって振動する回転体の振幅を測定できる。
このように、回転体のX軸方向の応答特性とY軸方向の応答特性をそれぞれ単独に測定可能な構成であってもよい。
【0058】
以上のように、本実施形態に係る振動特性測定装置1(図1の(a)参照)は、多段遠心圧縮機50(図1の(a)参照)に備わる回転体(回転軸51(図1の(a)参照)、遠心羽根車53(図1の(a)参照))の応答特性を測定するとき、釣合せ信号発生装置8(図3参照)が発生する発振信号Fx、Fyと、加振応答分析装置9(図3参照)が発生する加振信号Ex,Eyを加算器7a(図3参照)で加算し、X軸方向の発振信号Fxの成分とX軸方向の加振信号Exの成分を含んだ加算信号ADDx(図3参照)、およびY軸方向の発振信号Fyの成分とY軸方向の加振信号Eyの成分を含んだ加算信号ADDy(図3参照)を生成する。
加算信号ADDx,ADDyは、加振制御装置7(図3参照)からの出力信号として電流増幅器11(X増幅器11X(図3参照),Y増幅器11Y(図3参照))に入力される。
X増幅器11Xは、加算信号ADDxを増幅した電流を磁気軸受12の電磁石12X(図3参照)に供給し、Y増幅器11Yは、加算信号ADDyを増幅した電流を磁気軸受12の電磁石12Y(図3参照)に供給する。
【0059】
回転体は、電磁石12X(図3参照)に供給される電流に含まれるX軸方向の発振信号Fxの成分と、電磁石12Y(図3参照)に供給される電流に含まれるY軸方向の発振信号Fyの成分によって、不釣合い振動が解消する。また、電磁石12Xに供給される電流に含まれるX軸方向の加振信号Exの成分と、電磁石12Yに供給される電流に含まれるY軸方向の加振信号Eyの成分によって加振される。
【0060】
この構成によって、振動特性測定装置1(図1の(a)参照)が、多段遠心圧縮機50(図1の(a)参照)に備わる回転体の応答特性を測定するとき、回転体の不釣合い振動を解消することができる。このことによって、加振による強制振動の振幅の許容範囲を広げることができ、変位センサ13(X変位センサ13X(図3参照)、Y変位センサ13Y(図3参照))が出力するX変位信号MxとY変位信号MyのSN比を良くすることができる。そして、加振応答分析装置9(図3参照)は、X軸方向の変位に関する高品質のデータとY軸方向の変位に関する高品質のデータを取得できる。
【0061】
さらに、取得するデータの品質が高く、数少ないデータで回転体の応答特性を評価することができるため、データの取得に要する時間を短くできる。ひいては、データの取得に要する工数を削減することができ、エネルギの消費量を減らすことができる。
【0062】
なお、加振信号Ex,Eyとしては、前記した正弦波信号のほか、ランダム信号やパルス信号なども考えられる。
加振応答分析装置9が、正弦波信号以外の信号を加振信号として発生する場合も、その加振信号の成分(第1方向加振成分、第2方向加振成分)に発振信号の成分(余弦波成分、正弦波成分)を加算した回転体制御信号を電流増幅器11(図3参照)で増幅した電流を磁気軸受12(図3参照)に供給する構成とすればよい。
【0063】
また、回転体の安定性を評価するために、回転体の振動波形を分析してシステムパラメータを同定する方法もある。例えば、固有振動数の振動を回転体に発生させる周波数の正弦波成分を含む加振信号で回転体を加振し、さらに、回転体が共振状態にあるときに加振信号を瞬時に遮断したときの自由振動波形によってシステムパラメータを同定することが可能である(システム同定の詳細については、例えば、「MATLABによる制御のためのシステム同定(1996年 足立修一著 東京電機大学出版局)」参照)。
【0064】
このようにシステムパラメータを同定する方法の場合にも、固有振動数の振動を回転体に発生させる加振信号に発振信号を加算した回転体制御信号を電流増幅器11(図3参照)で増幅した電流を磁気軸受12(図3参照)に供給する構成とすればよい。さらに、加振信号を遮断した後は回転体が自由振動している間、発振信号Fx、Fyを電流増幅器11で増幅した電流を磁気軸受12に供給する構成とすれば、変位センサ13(図3参照)は、自由振動している回転体の変位を、不釣合い振動の影響を受けることなく測定できる。
【0065】
なお、振動特性測定装置1の設計変更例として、例えば、図6に示すように、加算器7aから出力される加算信号ADDx、ADDyの出力を遮断する加振信号遮断器10を有する加振制御装置7を備える構成であってもよい。
加振信号遮断器10には、X変位センサ13Xが出力するX変位信号MxとY変位センサ13Yが出力するY変位信号Myが入力される。
そして加振信号遮断器10は、X変位信号Mxに基づいて算出される回転体のX軸方向の変位、またはY変位信号Myに基づいて算出される回転体のY軸方向の変位の少なくとも一方が所定の閾値を超えたときに、加算信号ADDx、ADDyの信号の出力を遮断するように構成される。
【0066】
この構成によると、例えば、加算信号ADDx、ADDyの加振信号Ex,Eyの成分による加振によって、X軸方向の変位、またはY軸方向の変位が所定の閾値を超えたとき、すなわち、回転体の振幅が許容値をこえたときに、加算信号ADDx、ADDyが電流増幅器11で増幅された電流の、磁気軸受12への供給が遮断される。したがって、回転体に発生している、許容値を超えた振幅での振動を収束させることができ、例えば、シール機構55(図1の(a)参照)が損傷することを防止できる。
【0067】
なお、図示はしないが、加振信号遮断器10を、加振応答分析装置9と加算器7aの間に配置する構成とすれば、回転体の振幅が許容値を超えたときに加振応答分析装置9が出力する加振信号Ex,Eyの加算器7aへの入力を遮断できる。したがって、加振制御装置7から発振信号Fx、Fyのみが出力され、発振信号Fx、Fyを電流増幅器11で増幅した電流が磁気軸受12に供給される。
この構成によると、回転体に発生している、許容値を超えた振幅での振動をより速やかに収束させることができる。
【符号の説明】
【0068】
1 振動特性測定装置
7 加振制御装置
8 釣合せ信号発生装置
9 加振応答分析装置
10 加振信号遮断器
11 電流増幅器(電流供給装置)
12 磁気軸受
13 変位センサ(測定装置)
50 多段遠心圧縮機(回転機械)
51 回転軸(回転体)
52a,52b,52c 軸受部材
53 遠心羽根車(回転体)
54 ハウジング(静止体)
55 シール機構
ADDx,ADDy 加算信号(回転体制御信号)
Ex,Ey 加振信号(加振制御信号)
Fx,Fy 発振信号
Fz 振動解消信号
【特許請求の範囲】
【請求項1】
回転機械の回転体を非接触支持する磁気軸受と、
前記回転体が振動するときの振幅を測定する測定装置と、
前記磁気軸受に電流を供給する電流供給装置と、
前記回転体を加振するように前記磁気軸受を制御する加振制御信号を出力するとともに、前記測定装置が測定する前記振幅に基づいて、前記加振制御信号に対する前記回転体の振動の前記加振制御信号に対する応答特性を測定する加振制御装置と、を備える振動特性測定装置であって、
前記加振制御装置は前記応答特性を測定するときに、
前記回転体が回転するときに発生する不釣合い振動を前記磁気軸受で解消するための振動解消信号を前記加振制御信号に加算した回転体制御信号を出力し、
前記電流供給装置は、前記回転体制御信号に応じた磁力を発生させる電流を前記磁気軸受に供給することを特徴とする振動特性測定装置。
【請求項2】
前記加振制御装置は、
回転する前記回転体の回転周期と等しい周期の余弦波成分を、前記回転体の軸線方向と直交する第1方向の振動を解消する成分とし、
回転する前記回転体の回転周期と等しい周期の正弦波成分を、前記軸線方向および前記第1方向と直交する第2方向の振動を解消する成分として前記振動解消信号を生成し、
前記回転体を前記第1方向に加振する第1方向加振成分と、前記回転体を前記第2方向に加振する第2方向加振成分と、を含んで前記加振制御信号を生成し、
さらに、前記余弦波成分と前記第1方向加振成分を加算し、前記正弦波成分と前記第2方向加振成分を加算して前記回転体制御信号を生成することを特徴とする請求項1に記載の振動特性測定装置。
【請求項3】
前記加振制御装置は、
前記測定装置が測定する前記振幅が所定の許容値より大きいときに、前記回転体制御信号の出力を遮断する加振信号遮断器を備えることを特徴とする請求項1または請求項2に記載の振動特性測定装置。
【請求項4】
回転機械の回転体を非接触支持する磁気軸受と、
前記回転体が振動するときの振幅を測定する測定装置と、
前記回転体を加振するように前記磁気軸受を制御する加振制御信号および前記回転体が回転するときに発生する不釣合い振動を解消する振動解消信号を出力するとともに、前記測定装置が測定する前記振幅に基づいて、前記回転体の振動の前記加振制御信号に対する応答特性を測定する加振制御装置と、を備える振動特性測定装置における振動特性測定方法であって、
前記加振制御信号に前記振動解消信号を加算して回転体制御信号を発生するステップと、
前記回転体制御信号に応じた磁力を発生させる電流が前記磁気軸受に供給されたときに前記振幅を測定するステップと、
を有することを特徴とする振動特性測定方法。
【請求項1】
回転機械の回転体を非接触支持する磁気軸受と、
前記回転体が振動するときの振幅を測定する測定装置と、
前記磁気軸受に電流を供給する電流供給装置と、
前記回転体を加振するように前記磁気軸受を制御する加振制御信号を出力するとともに、前記測定装置が測定する前記振幅に基づいて、前記加振制御信号に対する前記回転体の振動の前記加振制御信号に対する応答特性を測定する加振制御装置と、を備える振動特性測定装置であって、
前記加振制御装置は前記応答特性を測定するときに、
前記回転体が回転するときに発生する不釣合い振動を前記磁気軸受で解消するための振動解消信号を前記加振制御信号に加算した回転体制御信号を出力し、
前記電流供給装置は、前記回転体制御信号に応じた磁力を発生させる電流を前記磁気軸受に供給することを特徴とする振動特性測定装置。
【請求項2】
前記加振制御装置は、
回転する前記回転体の回転周期と等しい周期の余弦波成分を、前記回転体の軸線方向と直交する第1方向の振動を解消する成分とし、
回転する前記回転体の回転周期と等しい周期の正弦波成分を、前記軸線方向および前記第1方向と直交する第2方向の振動を解消する成分として前記振動解消信号を生成し、
前記回転体を前記第1方向に加振する第1方向加振成分と、前記回転体を前記第2方向に加振する第2方向加振成分と、を含んで前記加振制御信号を生成し、
さらに、前記余弦波成分と前記第1方向加振成分を加算し、前記正弦波成分と前記第2方向加振成分を加算して前記回転体制御信号を生成することを特徴とする請求項1に記載の振動特性測定装置。
【請求項3】
前記加振制御装置は、
前記測定装置が測定する前記振幅が所定の許容値より大きいときに、前記回転体制御信号の出力を遮断する加振信号遮断器を備えることを特徴とする請求項1または請求項2に記載の振動特性測定装置。
【請求項4】
回転機械の回転体を非接触支持する磁気軸受と、
前記回転体が振動するときの振幅を測定する測定装置と、
前記回転体を加振するように前記磁気軸受を制御する加振制御信号および前記回転体が回転するときに発生する不釣合い振動を解消する振動解消信号を出力するとともに、前記測定装置が測定する前記振幅に基づいて、前記回転体の振動の前記加振制御信号に対する応答特性を測定する加振制御装置と、を備える振動特性測定装置における振動特性測定方法であって、
前記加振制御信号に前記振動解消信号を加算して回転体制御信号を発生するステップと、
前記回転体制御信号に応じた磁力を発生させる電流が前記磁気軸受に供給されたときに前記振幅を測定するステップと、
を有することを特徴とする振動特性測定方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−233750(P2012−233750A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−101422(P2011−101422)
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
[ Back to top ]