
振動特性測定装置と測定方法
【課題】 HDDのサスペンション等に生じる受衝時における振動を高精度に測定可能とする。
【解決手段】 信号源13aは、ハードディスク装置16のスライダ16dの振動周波数より高い周波数の信号を発生し、ハードディスク装置のスライダ16dとディスク16aの一方に供給する。検波器13iは、スライダ16dとディスク16aの他方から出力された信号を検波し、ハードディスク装置の受衝時に、スライダ16dとディスク16a間の静電容量の変化を電圧値として出力する。
【解決手段】 信号源13aは、ハードディスク装置16のスライダ16dの振動周波数より高い周波数の信号を発生し、ハードディスク装置のスライダ16dとディスク16aの一方に供給する。検波器13iは、スライダ16dとディスク16aの他方から出力された信号を検波し、ハードディスク装置の受衝時に、スライダ16dとディスク16a間の静電容量の変化を電圧値として出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばハードディスク装置(以下、HDDと称す)のサスペンション等に生じる振動を測定する振動特性測定装置と測定方法に関する。
【背景技術】
【0002】
近年、HDDは様々な用途に使用され、様々なユーザーに扱われている。このため、HDDは過酷な環境で使用されることが予想され、衝撃に対する十分な信頼性が要求される。したがって、従来にも増して耐衝撃性能の向上が求められている。
【0003】
HDDは、回転するディスクに情報を記録したり再生したりするため、サスペンションが使用されている。サスペンションはアームの先端部に取付けられ、サスペンションの先端に、磁気ヘッドを構成するスライダが設けられている。HDDに衝撃が加わり、スライダやサスペンションがディスクに接触してディスク表面に傷が生じた場合、HDDの性能劣化の原因となる。このため、HDDの受衝時におけるスライダやサスペンションの挙動を評価する必要がある。従来、HDDのスライダやサスペンションに対する耐衝撃評価方法としては、次のようなものがある。
【0004】
(1)ハイスピードカメラによる受衝時におけるスライダの挙動観察
(2)ドップラ振動計による受衝時におけるスライダの挙動測定(例えば特許文献1参照)
(3)受衝後、ディスク表面に生じた傷の観察
(4)受衝時におけるスライダとディスクとの間隔の変化を、静電容量の動的な変化として観測する技術が発表されている(例えば非特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−192735号公報
【非特許文献1】A Novel HDD ”Component-Level Operational-Shock Measurement Method” (IEEE TRANSACTION OF MAGNETICS, Vol43, No6, June2007)
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記(1)(2)(3)の評価方法はいずれも、スライダが受衝時にその勢いでディスクから浮上する(スライダ・リフトオフ)レベルを測定するものである。しかし、スライダの浮上量は10nm程度と非常に小さく、スライダのリフトオフが生じないレベル、つまり受衝時におけるスライダの浮上量の僅かな変化や、スライダがディスクに接触したかどうかを正確に評価することが非常に困難であった。しかも、HDDが動作状態での受衝時におけるスライダとディスクとの間隔の変化を簡便に測定することが困難であった。
【0007】
また、(4)の静電容量を観測する技術の場合、HDDをキャパシタンスメータに接続して観測するものであり、高価な汎用測定機等を組み合わせて使用した実験と考えられる。静電容量は、一般的なLCRメータにより測定可能である。しかし、静的な静電容量の測定を目的とする市販のLCRメータは、測定スピードが高速なものでも200Hz(5ms)程度である。このため、100〜200KHz程度の振動周波数を有するスライダの挙動を動的な静電容量の変化として測定することは困難である。
【0008】
本発明は、HDDのサスペンション等に生じる受衝時の振動を高精度に測定することが可能な振動特性測定装置と測定方法を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明の振動特性測定装置の態様は、ハードディスク装置のスライダの振動周波数より高い周波数の信号を発生し、前記ハードディスク装置のスライダとディスクの一方に供給する信号源と、前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として出力する検波器とを具備することを特徴とする。
【0010】
本発明の振動特性測定方法の態様は、ハードディスク装置のスライダの振動周波数より高い周波数の信号を、前記ハードディスク装置のスライダとディスクの一方に供給し、前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として測定することを特徴とする。
【発明の効果】
【0011】
本発明によれば、ディスクとスライダとの間の静電容量の変化を簡易且つ高精度に測定することにより、HDDのサスペンション等に生じる受衝時の振動を高精度に測定することが可能な振動特性測定装置と測定方法を提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明の振動特性測定装置の実施形態に係る構成図。
【図2】図1に示す静電容量検出器の一例を示す回路構成図。
【図3】包絡線検波の様子を示す図。
【図4】本発明の原理を説明するために示す等価回路図。
【図5】本発明の原理を説明するために示す特性図。
【図6】衝撃時及び衝撃後のアームの挙動を説明するために示す図。
【図7】本実施形態に係り、受衝時において、スライダがリフトオフしない状態における静電容量の変化を示す図。
【図8】本実施形態に係り、受衝時において、スライダがリフトオフしない状態における静電容量の変化とアーム等のモーション・トラッキングの関係を示す図。
【図9】本実施形態に係り、受衝時におけるサスペンションとディスクの接触、及び静電容量の変化の関係を示す図。
【図10】図1に示す静電容量検出器の他の例を示す回路構成図。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について、図面を参照して説明する。
【0014】
先ず、本発明の原理について説明する。
【0015】
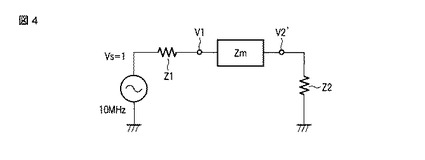
本発明は、HDDの例えばスライダとディスク間の静電容量の変化を電圧変化として検出する。図4に示すように、HDDのスライダとディスクをキャパシタZmと仮定し、キャパシタンスZmに、信号源の周波数が例えば10MHz、振幅値Vs=1の正弦波信号を出力インピーダンスZ1から供給し、その出力を入力インピーダンスZ2で受ける場合において、キャパシタの第1の端子の信号をV1、第2の端子の信号をV2’とした場合、周知のS21通過特性は、次式で表される。
【0016】
S21=V2’/V1
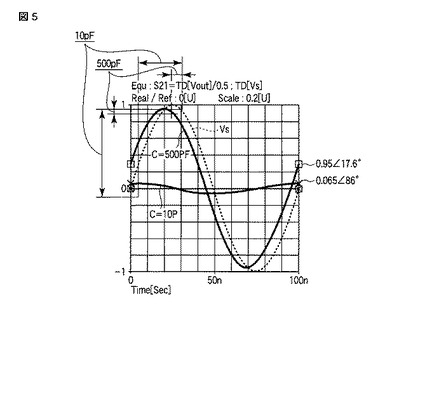
ここで、入出力インピーダンスZ1=Z2としてキャパシタZmの静電容量を例えばCp=500pF(HDDのスライダとディスクが接触する直前を想定した静電容量)、Cp=10pF(受衝時に、HDDのスライダがディスクからリフトオフした場合を想定した静電容量)として、上記条件に基づきシミュレーションした場合、S21通過特性のシミュレーション結果は、図5に示すようになる。具体的には、各静電容量に対するS21通過特性は、次のようになる。
【0017】
Cp=500pFの場合、S21=0.95、位相遅れ17.6°
Cp=10pFの場合、S21=0.065、位相遅れ86°
このように、静電容量に応じてS21振幅特性の減少、及び位相進みが生じることが分かる。HDDのスライダの機械振動により生じる静電容量の変化分を電気信号に変換するには、例えば第2の端子の信号V2’の振幅変化分を検出すること、又は、信号V2’の位相の変化分を検出すること、若しくは、信号V2’の振幅と位相の変化分の両方を検出することにより可能となる。
【0018】
(実施形態)
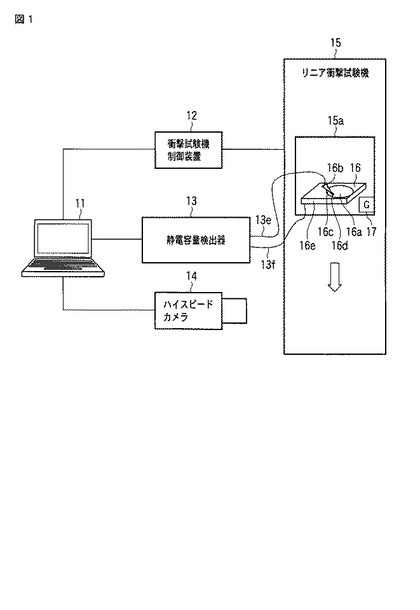
図1は、本実施形態に係る振動特性測定装置を示している。例えばパーソナルコンピュータにより構成された制御部11は、装置全体の動作を制御する。制御部11には、例えば衝撃試験機制御装置12、静電容量検出器13、ハイスピードカメラ14が接続されている。衝撃試験機制御装置12は、制御部11の制御に基づきリニア衝撃試験機15を制御する。リニア衝撃試験機15は、ステージ15aを有し、このステージ15a上に被テスト装置としてのHDDが載置される。リニア衝撃試験機15は、衝撃試験機制御装置12の制御に基づきステージ15aを所定の高さから落下させる。ステージ15aには、加速度センサ(Gセンサ)17が設けられ、このGセンサ17によりステージ15aの落下時の加速度が検出される。このGセンサ17の出力信号は、例えば衝撃試験機制御装置12を介して制御部11に供給される。
【0019】
静電容量検出器13は、制御部11の制御に基づき、HDD16のディスク16aとスライダ16dと間の静電容量の変化を電圧値の変化として検出する。HDD16において、アーム16bの先端部にサスペンション16cが取付けられている。サスペンション16cの先端に、磁気ヘッドを構成するスライダ16aが設けられている。ディスク16aが高速で回転すると、ディスク16aとスライダ16dとの間にエアベアリングが形成される。このため、スライダ16dは、ディスク16aから10nm程度浮上される。スライダ16dは金属製であり、ヘッドはシリコンにより構成されている。磁気ディスクとしてのディスク16a表面はDLC(Diamond Like Carbon)膜により覆われている。このため、スライダ16dとディスク16aは、キャパシタを構成する。
【0020】
静電容量検出器13の第1の端子は、HDD16の例えばサスペンション16cに接続される。サスペンション16cとスライダ16d及びアーム16bは、金属製であるため、電気的に接続されている。このため、本測定において、サスペンション16cとアーム16bが電気的に絶縁され、サスペンション16cを含むスライダ16dがキャパシタの一方の電極と見做される。また、第2の端子は、HDD16の例えば金属製ケース16eに接続される。ディスク16aはその中心に設けられた図示せぬスピンドルを介してケース16eに回転可能に設けられ、ディスク16aとケース16eはスピンドルを介して電気的に接続されている。これらの抵抗値は僅かであるため、ディスク16aがキャパシタの他方の電極と見做される。
【0021】
この状態において、後述するように、振幅と周波数の安定した信号がスライダとディスク間に印加され、出力信号の微細な振幅値の変化を検出することにより、スライダとディスク間の瞬時の容量の変化分が検出される。静電容量検出器13の検出信号は、制御部11に供給される。
【0022】
ハイスピードカメラ14は、リニア衝撃試験機15のステージ15aの落下位置に配置されている。ハイスピードカメラ14は、制御部11の制御に基づき、ステージ15aに載置されたHDD16内のスライダ16d等の挙動を落下位置において撮影する。このハイスピードカメラ14の出力信号は、例えばデジタル信号に変換され、制御部11に供給される。
【0023】
尚、HDD16のアーム16b、サスペンション16c、スライダ16dに必要に応じて例えばGセンサを貼り付け、これらにかかる加速度を測定してもよい。
【0024】
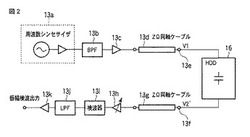
図2は、静電容量検出器13の一例を示している。この静電容量検出器13は、例えば発振器としての周波数シンセサイザ13a、帯域通過フィルタ(BPF)13b、増幅器13c、同軸ケーブル13d、13g、第1の端子13e、第2の端子13f、レベル調整回路13h、検波器13i、低域通過フィルタ(LPF)13j、増幅器13kにより構成されている。
【0025】
周波数シンセサイザ13aは、HDD16のスライダ16dの振動周波数の例えば50乃至100倍程度の周波数の信号を出力する。具体的には、例えば5〜10MHzの正弦波信号を出力する。周波数シンセサイザ13aが出力する周波数の安定した信号は、BPF13bに供給され、不必要な信号が除去される。BPF13bの出力信号は、出力インピーダンスZΩ(例えば50Ω)の増幅器13cから必要な振幅値として出力され、ZΩ(50Ω)同軸ケーブル13d、第1の端子13eを介してHDD16のスライダ16dに供給される。
【0026】
また、HDD16のケース16eに接続された第2の端子13fの信号は、ZΩ(例えば50Ω)同軸ケーブル13gを介して、入力インピーダンスZΩ(50Ω)のレベル調整回路13hに供給される。このレベル調整回路13hによりレベルが調整された信号は検波器13iに供給される。レベルの調整方法は、端子13eと端子13fからHDD16を外して、この間をショートして得られる振幅検波出力レベルを基準とする値、例えば“1”となるように調整する。尚、この基準とする値は、検波器13iが飽和してしまうような大信号にならないように、また逆に小さすぎて、検波器特性のダイナミックレンジを損なわない範囲に設定される。このレベル調整回路13hによりレベルが調整された信号は検波器13iに供給される。この検波器13iは、例えば包絡線検波器である。第2の端子13fに得られる信号は、図3に示すように、周波数シンセサイザ11から出力された信号をキャリアとし、スライダ16dとディスク16a間の容量の変化により振幅変調された信号となっている。検波器13iは、この振幅変調された信号を検波する。検波器13iの出力信号は、LPF13jにより低域の電圧に変換され、増幅器13kを介して制御部11に供給される。
【0027】
上記構成において、動作について説明する。
【0028】
図1に示す制御部11の制御に基づき、静電容量検出器13からHDD16のスライダ16dに、周波数が例えば5MHz、実効値が+10dBmの正弦波信号を印加する。HDD16は、ディスク16aが回転され、スライダ16dがディスク16a上に移動されている。この状態において、衝撃試験機制御装置12の制御に基づき、リニア衝撃試験機16のステージ16が所定の高さから落下され、HDD16に所定の加速度により衝撃が加えられる。静電容量検出器13は、第2の端子13fの信号を検波し、受衝時におけるHDD16のスライダ16dとディスク16a間の静電容量の変化を電圧値の変化として検出する。さらに、ハイスピードカメラ14は、受衝時におけるHDD16のスライダ16dとディスク16aを撮影する。静電容量検出器13、及びハイスピードカメラ14の出力信号は、制御部11に供給される。制御部11は、入力信号を周知の信号処理プログラムにより処理し、例えばディスプレイに表示する。
【0029】
図6は、スライダとディスクの接触モードの例を示している。図6(a)(b)は、ハイスピードカメラにより観測可能な接触モードを示し、図6(c)(d)は、静電容量の変化により判定可能な接触モードを示している。図6(a)は、受衝時のHDDの挙動を示している。HDDが衝撃を受けた場合、アームがディスクから離れる方向に移動し、ヘッドがリフトオフされる。その後、図6(b)に示すように、アームがディスク方向に移動し、ヘッドがディスクに接触する。このような、アーム及びヘッドの大きな挙動は、ハイスピードカメラにより観測することが可能である。
【0030】
しかし、図6(c)に示すように、HDDが衝撃を受けた際、図6(a)に示すように、ヘッドにリフトオフが生じないような負荷がアーム及びヘッドに加わった場合においても、図6(d)に示すように、ヘッドがディスクに接触することがある。このようなアーム及びヘッドの僅かな挙動は、ハイスピードカメラの観測では困難であった。
【0031】
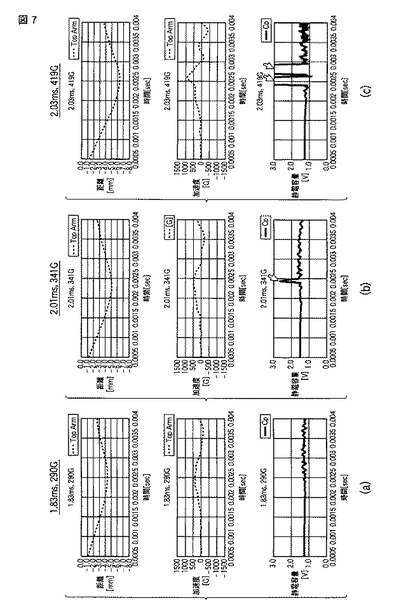
図7(a)(b)(c)は、HDD16に印加される加速度を変化させてディスクとスライダとの静電容量を測定した場合を示している。図7(a)(b)(c)は、いずれもスライダのリフトオフがないレベルの衝撃をHDD16に与えた場合を示している。図7(a)(b)(c)において、距離はアーム(トップ・アーム)の変位であり、加速度はアームに加わる加速度を示している。また、静電容量は、電圧値(V)として表示している。
【0032】
図7(a)は、衝撃の継続時間(デュレーションタイム)が1.83ms、加速度が290Gの場合におけるディスクとスライダとの静電容量の変化を示している。この場合、加速度の変化に対する静電容量の変化は僅かであり、スライダがヘッドに接触することはない。
【0033】
図7(b)は、デュレーションタイムが2.01ms、加速度が341Gの場合におけるディスクとスライダとの静電容量の変化を示している。この場合、加速度が最大となった時点において、図示矢印で示すように、静電容量の変化に振幅の大きなピークが生じている。この時点において、スライダのリフトオフはないが、試験後、ディスク表面を目視により確認した結果、ディスク表面に傷が生じていた。このため、スライダがヘッドに接触したものと判断される。
【0034】
図7(c)は、デュレーションタイムが2.03ms、加速度が419Gの場合におけるディスクとスライダとの静電容量の変化を示している。この場合、加速度が大きく変化した時点において、図示矢印で示すように、静電容量に2つの非常に大きなピークが生じている。この場合も、この時点において、スライダのリフトオフはないが、試験後、ディスク表面を目視により確認した結果、ディスク表面に傷が生じていた。このため、スライダがヘッドに接触したものと判断される。
【0035】
ハイスピードカメラを用いた従来の測定では、受衝時にスライダがリフトオフしない状態において、スライダとディスクとの接触を検出することは困難であった。
【0036】
これに対して、本実施形態によれば、図7(b)(c)に示すように、受衝時にスライダがリフトオフしない状態においても、スライダとディスク間の静電容量の変化を検出することにより、スライダとディスクとの接触を検出することができる。
【0037】
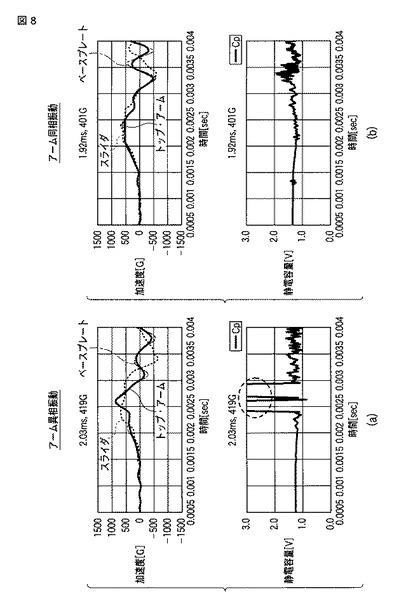
図8(a)(b)は、受衝時におけるアーム、スライダ、ベースプレートのモーション・トラッキングと静電容量の変化を示している。モーション・トラッキングは、例えば加速度センサを用いて、アーム(トップ・アーム)、スライダ、HDDのベースプレートの振動を測定したものである。図8(a)(b)は、いずれもスライダのリフトオフがないレベルの衝撃をHDD16に与えている。
【0038】
モーショント・トラッキングは、例えば静電容量の測定と同時に行われる。このため、例えば加速度センサの出力信号を図1に示す制御部11に供給することにより、静電容量の測定と同時に行うことが可能である。
【0039】
図8(a)に示す場合、デュレーションタイムは2.03msであり、加速度は419Gである。この場合、アームとベースプレートは同相で振動している。しかし、時間0.002〜0.0035(sec)の範囲において、スライダは、アーム及びベースプレートと同相で振動していない。また、静電容量は、この時間範囲において、大きく変化し、スライダとディスクが接触したことが分かる。これより、スライダと、アーム及びベースプレートとが同相で振動していない場合、スライダがディスクに接触することが判明した。
【0040】
図8(b)に示す場合、デュレーションタイムは1.92msであり、加速度は401Gである。すなわち、図8(b)は、図8(a)に比べてHDDへの衝撃が若干小さい場合を示している。この場合、アームとベースプレート、及びスライダが同相で振動している範囲において、静電容量の大きな変化はない。しかし、時間0.0035(sec)の前後において、図8(a)程ではないが、静電容量が変化している。この程度の静電容量の変化では、スライダとディスクが接触することはない。しかし、この時間において、スライダと、アーム及びベースプレートとが同相で振動していない。すなわち、スライダとディスクが接触しない範囲においても、静電容量の変化が増加する場合、スライダと、アーム及びベースプレートとの間に異相振動が発生していることが分かる。
【0041】
スライダ、アーム及びベースプレートは、それぞれ異なる質量を有している。HDDに加速度が加わった場合、加速度の大きさによりスライダ、アーム及びベースプレートの振動周期が変化する。従来、スライダ、アーム及びベースプレートの振動と、スライダとディスクとの接触の関係が明らかではなかった。しかし、図8(a)(b)に示すように、スライダとディスク間の静電容量の変化を検出することにより、静電容量が大きく変化した場合、スライダ、アーム及びベースプレートに異相振動が生じ、スライダとディスクとの接触が生じることが分かった。
【0042】
また、スライダと、アーム及びベースプレートとの異相振動により、スライダとディスクとの接触が生じることが判明したことにより、スライダ、アーム及びベースプレートを含めたHDD構成部品の設計、製造工程において、これらの振動特性をほぼ一致させることが、スライダとディスクとの接触を防止するために重要であることが判明した。
【0043】
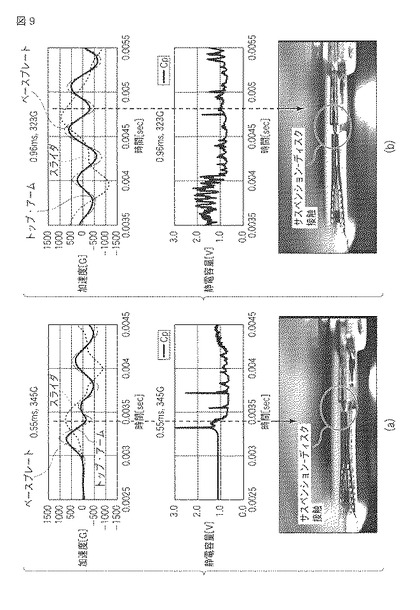
図9(a)(b)は、サスペンションとディスクとの接触の関係を示している。受衝時、スライダがディスクに接触する以外に、加速度の大きさによっては、サスペンションがディスクに接触することがある。しかし、従来、どのタイミングでスライダがディスクに接触するのか、ハイスピードカメラやモーション・トラッキングによる観測だけでは分からなかった。これに対して、本実施形態によれば、スライダとディスク間の静電容量の変化を検出しているため、サスペンションやスライダがディスクに接触するタイミングを区別して知ることが可能となった。
【0044】
図9(a)は、HDDのデュレーションタイムが0.55ms、加速度345Gを加えた場合を示している。モーション・トラッキングに示す時間0.003〜0.0035[sec]の範囲において、アームとベースプレートがほぼ同相で振動し、スライダが異相で振動している状態において、静電容量について最初のピークが発生している。このとき、スライダがディスクに接触する。この後、破線で示すように、スライダとアーム及びベースプレートとが逆相となった時点において、ハイスピードカメラの画像に示されるように、サスペンションがディスクに接触していることが分かった。すなわち、従来は、受衝時におけるスライダとサスペンションとの接触タイミングが判明しなかったが、静電容量の変化をモーション・トラッキングとともに時系列に検出することにより、これらの接触タイミングを解明することが可能となった。
【0045】
図9(b)は、HDDのデュレーションタイムが0.96ms、加速度323Gを加えた場合を示している。モーション・トラッキングに示す時間0.0045〜0.005[sec]の範囲において、アームとベースプレートがほぼ同相で振動し、スライダが異相で振動している状態において、静電容量について最初のピークが発生している。このとき、スライダがディスクに接触する。この後、破線で示すように、スライダとアーム及びベースプレートとが逆相となった時点において、ハイスピードカメラの画像に示されるように、ベースプレートがディスクに接触していることが分かった。
【0046】
上記実施形態によれば、スライダとディスク間の静電容量の変化を時系列に検出することにより、スライダのリフトオフが生じない場合におけるスライダとディスクの接触を検出することができる。このため、受衝時におけるスライダ、サスペンション、及びアームの挙動を正確に観察することが可能である。
【0047】
また、スライダの挙動という機械振動で生じる動的、且つ高速な静電容量の変化を電圧変化に変換することにより、高価且つ特殊な測定装置を用いることなく、簡便にnmオーダのスライダの挙動を正確に観察することができる。
【0048】
さらに、静電容量の変化を電圧変化として時系列に記録しているため、例えば汎用のFFT(フーリエ変換)処理により、スライダの挙動の周波数成分を解析することも可能である。
【0049】
尚、上記実施形態において、静電容量検出器13は、包絡線検波器を用いて静電容量の変化を検波した。しかし、これに限定されるものではない。
【0050】
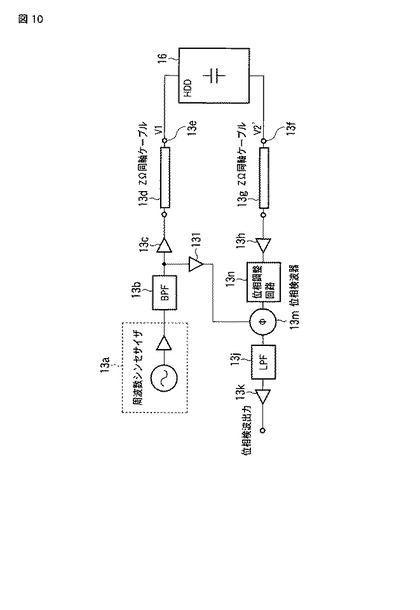
図10は、静電容量検出器13の他の実施形態を示すものであり、位相検波器を用いた例を示している。図10において、図2と同一部分には同一符号を付し、異なる部分についてのみ説明する。
【0051】
図10において、BPF13bの出力信号は増幅器13lを介して位相検波器13mの一方入力端に基準信号として供給される。また、増幅器13hの出力信号は、位相調整回路13nを介して位相検波器13mの他方入力端に供給される。位相検波器13mは、位相調整回路13nの出力信号と基準信号との位相を比較し、その位相差に伴った電圧パルスを出力する。位相検波器13mの出力信号はLPF13jに供給される。位相調整回路13nの調整は、端子13eと端子fからHDD16を外し、この間をショートして得られる位相検波器13mの出力の位相差が、例えば0°となるようにする。
【0052】
この変形例によっても、上記実施形態と同様の効果を得ることができる。
【0053】
さらに、静電容量の検出精度を高めるには、包絡線検波及び位相検波の両方を用い、振幅の変化及び位相の変化の両方を検出してもよい。
【0054】
その他、本発明の要旨を変えない範囲において、種々変形実施可能なことは勿論である。
【符号の説明】
【0055】
11…制御部、12…衝撃試験機制御装置、13…静電容量検出器、14…ハイスピードカメラ、13i…検波器(包絡線検波器)、13m…位相検波器、15…リニア衝撃試験機、16…ハードディスク、16a…ディスク、16b…アーム、16c…サスペンション、16d…スライダ、16e…ケース。
【技術分野】
【0001】
本発明は、例えばハードディスク装置(以下、HDDと称す)のサスペンション等に生じる振動を測定する振動特性測定装置と測定方法に関する。
【背景技術】
【0002】
近年、HDDは様々な用途に使用され、様々なユーザーに扱われている。このため、HDDは過酷な環境で使用されることが予想され、衝撃に対する十分な信頼性が要求される。したがって、従来にも増して耐衝撃性能の向上が求められている。
【0003】
HDDは、回転するディスクに情報を記録したり再生したりするため、サスペンションが使用されている。サスペンションはアームの先端部に取付けられ、サスペンションの先端に、磁気ヘッドを構成するスライダが設けられている。HDDに衝撃が加わり、スライダやサスペンションがディスクに接触してディスク表面に傷が生じた場合、HDDの性能劣化の原因となる。このため、HDDの受衝時におけるスライダやサスペンションの挙動を評価する必要がある。従来、HDDのスライダやサスペンションに対する耐衝撃評価方法としては、次のようなものがある。
【0004】
(1)ハイスピードカメラによる受衝時におけるスライダの挙動観察
(2)ドップラ振動計による受衝時におけるスライダの挙動測定(例えば特許文献1参照)
(3)受衝後、ディスク表面に生じた傷の観察
(4)受衝時におけるスライダとディスクとの間隔の変化を、静電容量の動的な変化として観測する技術が発表されている(例えば非特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−192735号公報
【非特許文献1】A Novel HDD ”Component-Level Operational-Shock Measurement Method” (IEEE TRANSACTION OF MAGNETICS, Vol43, No6, June2007)
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記(1)(2)(3)の評価方法はいずれも、スライダが受衝時にその勢いでディスクから浮上する(スライダ・リフトオフ)レベルを測定するものである。しかし、スライダの浮上量は10nm程度と非常に小さく、スライダのリフトオフが生じないレベル、つまり受衝時におけるスライダの浮上量の僅かな変化や、スライダがディスクに接触したかどうかを正確に評価することが非常に困難であった。しかも、HDDが動作状態での受衝時におけるスライダとディスクとの間隔の変化を簡便に測定することが困難であった。
【0007】
また、(4)の静電容量を観測する技術の場合、HDDをキャパシタンスメータに接続して観測するものであり、高価な汎用測定機等を組み合わせて使用した実験と考えられる。静電容量は、一般的なLCRメータにより測定可能である。しかし、静的な静電容量の測定を目的とする市販のLCRメータは、測定スピードが高速なものでも200Hz(5ms)程度である。このため、100〜200KHz程度の振動周波数を有するスライダの挙動を動的な静電容量の変化として測定することは困難である。
【0008】
本発明は、HDDのサスペンション等に生じる受衝時の振動を高精度に測定することが可能な振動特性測定装置と測定方法を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明の振動特性測定装置の態様は、ハードディスク装置のスライダの振動周波数より高い周波数の信号を発生し、前記ハードディスク装置のスライダとディスクの一方に供給する信号源と、前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として出力する検波器とを具備することを特徴とする。
【0010】
本発明の振動特性測定方法の態様は、ハードディスク装置のスライダの振動周波数より高い周波数の信号を、前記ハードディスク装置のスライダとディスクの一方に供給し、前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として測定することを特徴とする。
【発明の効果】
【0011】
本発明によれば、ディスクとスライダとの間の静電容量の変化を簡易且つ高精度に測定することにより、HDDのサスペンション等に生じる受衝時の振動を高精度に測定することが可能な振動特性測定装置と測定方法を提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明の振動特性測定装置の実施形態に係る構成図。
【図2】図1に示す静電容量検出器の一例を示す回路構成図。
【図3】包絡線検波の様子を示す図。
【図4】本発明の原理を説明するために示す等価回路図。
【図5】本発明の原理を説明するために示す特性図。
【図6】衝撃時及び衝撃後のアームの挙動を説明するために示す図。
【図7】本実施形態に係り、受衝時において、スライダがリフトオフしない状態における静電容量の変化を示す図。
【図8】本実施形態に係り、受衝時において、スライダがリフトオフしない状態における静電容量の変化とアーム等のモーション・トラッキングの関係を示す図。
【図9】本実施形態に係り、受衝時におけるサスペンションとディスクの接触、及び静電容量の変化の関係を示す図。
【図10】図1に示す静電容量検出器の他の例を示す回路構成図。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について、図面を参照して説明する。
【0014】
先ず、本発明の原理について説明する。
【0015】
本発明は、HDDの例えばスライダとディスク間の静電容量の変化を電圧変化として検出する。図4に示すように、HDDのスライダとディスクをキャパシタZmと仮定し、キャパシタンスZmに、信号源の周波数が例えば10MHz、振幅値Vs=1の正弦波信号を出力インピーダンスZ1から供給し、その出力を入力インピーダンスZ2で受ける場合において、キャパシタの第1の端子の信号をV1、第2の端子の信号をV2’とした場合、周知のS21通過特性は、次式で表される。
【0016】
S21=V2’/V1
ここで、入出力インピーダンスZ1=Z2としてキャパシタZmの静電容量を例えばCp=500pF(HDDのスライダとディスクが接触する直前を想定した静電容量)、Cp=10pF(受衝時に、HDDのスライダがディスクからリフトオフした場合を想定した静電容量)として、上記条件に基づきシミュレーションした場合、S21通過特性のシミュレーション結果は、図5に示すようになる。具体的には、各静電容量に対するS21通過特性は、次のようになる。
【0017】
Cp=500pFの場合、S21=0.95、位相遅れ17.6°
Cp=10pFの場合、S21=0.065、位相遅れ86°
このように、静電容量に応じてS21振幅特性の減少、及び位相進みが生じることが分かる。HDDのスライダの機械振動により生じる静電容量の変化分を電気信号に変換するには、例えば第2の端子の信号V2’の振幅変化分を検出すること、又は、信号V2’の位相の変化分を検出すること、若しくは、信号V2’の振幅と位相の変化分の両方を検出することにより可能となる。
【0018】
(実施形態)
図1は、本実施形態に係る振動特性測定装置を示している。例えばパーソナルコンピュータにより構成された制御部11は、装置全体の動作を制御する。制御部11には、例えば衝撃試験機制御装置12、静電容量検出器13、ハイスピードカメラ14が接続されている。衝撃試験機制御装置12は、制御部11の制御に基づきリニア衝撃試験機15を制御する。リニア衝撃試験機15は、ステージ15aを有し、このステージ15a上に被テスト装置としてのHDDが載置される。リニア衝撃試験機15は、衝撃試験機制御装置12の制御に基づきステージ15aを所定の高さから落下させる。ステージ15aには、加速度センサ(Gセンサ)17が設けられ、このGセンサ17によりステージ15aの落下時の加速度が検出される。このGセンサ17の出力信号は、例えば衝撃試験機制御装置12を介して制御部11に供給される。
【0019】
静電容量検出器13は、制御部11の制御に基づき、HDD16のディスク16aとスライダ16dと間の静電容量の変化を電圧値の変化として検出する。HDD16において、アーム16bの先端部にサスペンション16cが取付けられている。サスペンション16cの先端に、磁気ヘッドを構成するスライダ16aが設けられている。ディスク16aが高速で回転すると、ディスク16aとスライダ16dとの間にエアベアリングが形成される。このため、スライダ16dは、ディスク16aから10nm程度浮上される。スライダ16dは金属製であり、ヘッドはシリコンにより構成されている。磁気ディスクとしてのディスク16a表面はDLC(Diamond Like Carbon)膜により覆われている。このため、スライダ16dとディスク16aは、キャパシタを構成する。
【0020】
静電容量検出器13の第1の端子は、HDD16の例えばサスペンション16cに接続される。サスペンション16cとスライダ16d及びアーム16bは、金属製であるため、電気的に接続されている。このため、本測定において、サスペンション16cとアーム16bが電気的に絶縁され、サスペンション16cを含むスライダ16dがキャパシタの一方の電極と見做される。また、第2の端子は、HDD16の例えば金属製ケース16eに接続される。ディスク16aはその中心に設けられた図示せぬスピンドルを介してケース16eに回転可能に設けられ、ディスク16aとケース16eはスピンドルを介して電気的に接続されている。これらの抵抗値は僅かであるため、ディスク16aがキャパシタの他方の電極と見做される。
【0021】
この状態において、後述するように、振幅と周波数の安定した信号がスライダとディスク間に印加され、出力信号の微細な振幅値の変化を検出することにより、スライダとディスク間の瞬時の容量の変化分が検出される。静電容量検出器13の検出信号は、制御部11に供給される。
【0022】
ハイスピードカメラ14は、リニア衝撃試験機15のステージ15aの落下位置に配置されている。ハイスピードカメラ14は、制御部11の制御に基づき、ステージ15aに載置されたHDD16内のスライダ16d等の挙動を落下位置において撮影する。このハイスピードカメラ14の出力信号は、例えばデジタル信号に変換され、制御部11に供給される。
【0023】
尚、HDD16のアーム16b、サスペンション16c、スライダ16dに必要に応じて例えばGセンサを貼り付け、これらにかかる加速度を測定してもよい。
【0024】
図2は、静電容量検出器13の一例を示している。この静電容量検出器13は、例えば発振器としての周波数シンセサイザ13a、帯域通過フィルタ(BPF)13b、増幅器13c、同軸ケーブル13d、13g、第1の端子13e、第2の端子13f、レベル調整回路13h、検波器13i、低域通過フィルタ(LPF)13j、増幅器13kにより構成されている。
【0025】
周波数シンセサイザ13aは、HDD16のスライダ16dの振動周波数の例えば50乃至100倍程度の周波数の信号を出力する。具体的には、例えば5〜10MHzの正弦波信号を出力する。周波数シンセサイザ13aが出力する周波数の安定した信号は、BPF13bに供給され、不必要な信号が除去される。BPF13bの出力信号は、出力インピーダンスZΩ(例えば50Ω)の増幅器13cから必要な振幅値として出力され、ZΩ(50Ω)同軸ケーブル13d、第1の端子13eを介してHDD16のスライダ16dに供給される。
【0026】
また、HDD16のケース16eに接続された第2の端子13fの信号は、ZΩ(例えば50Ω)同軸ケーブル13gを介して、入力インピーダンスZΩ(50Ω)のレベル調整回路13hに供給される。このレベル調整回路13hによりレベルが調整された信号は検波器13iに供給される。レベルの調整方法は、端子13eと端子13fからHDD16を外して、この間をショートして得られる振幅検波出力レベルを基準とする値、例えば“1”となるように調整する。尚、この基準とする値は、検波器13iが飽和してしまうような大信号にならないように、また逆に小さすぎて、検波器特性のダイナミックレンジを損なわない範囲に設定される。このレベル調整回路13hによりレベルが調整された信号は検波器13iに供給される。この検波器13iは、例えば包絡線検波器である。第2の端子13fに得られる信号は、図3に示すように、周波数シンセサイザ11から出力された信号をキャリアとし、スライダ16dとディスク16a間の容量の変化により振幅変調された信号となっている。検波器13iは、この振幅変調された信号を検波する。検波器13iの出力信号は、LPF13jにより低域の電圧に変換され、増幅器13kを介して制御部11に供給される。
【0027】
上記構成において、動作について説明する。
【0028】
図1に示す制御部11の制御に基づき、静電容量検出器13からHDD16のスライダ16dに、周波数が例えば5MHz、実効値が+10dBmの正弦波信号を印加する。HDD16は、ディスク16aが回転され、スライダ16dがディスク16a上に移動されている。この状態において、衝撃試験機制御装置12の制御に基づき、リニア衝撃試験機16のステージ16が所定の高さから落下され、HDD16に所定の加速度により衝撃が加えられる。静電容量検出器13は、第2の端子13fの信号を検波し、受衝時におけるHDD16のスライダ16dとディスク16a間の静電容量の変化を電圧値の変化として検出する。さらに、ハイスピードカメラ14は、受衝時におけるHDD16のスライダ16dとディスク16aを撮影する。静電容量検出器13、及びハイスピードカメラ14の出力信号は、制御部11に供給される。制御部11は、入力信号を周知の信号処理プログラムにより処理し、例えばディスプレイに表示する。
【0029】
図6は、スライダとディスクの接触モードの例を示している。図6(a)(b)は、ハイスピードカメラにより観測可能な接触モードを示し、図6(c)(d)は、静電容量の変化により判定可能な接触モードを示している。図6(a)は、受衝時のHDDの挙動を示している。HDDが衝撃を受けた場合、アームがディスクから離れる方向に移動し、ヘッドがリフトオフされる。その後、図6(b)に示すように、アームがディスク方向に移動し、ヘッドがディスクに接触する。このような、アーム及びヘッドの大きな挙動は、ハイスピードカメラにより観測することが可能である。
【0030】
しかし、図6(c)に示すように、HDDが衝撃を受けた際、図6(a)に示すように、ヘッドにリフトオフが生じないような負荷がアーム及びヘッドに加わった場合においても、図6(d)に示すように、ヘッドがディスクに接触することがある。このようなアーム及びヘッドの僅かな挙動は、ハイスピードカメラの観測では困難であった。
【0031】
図7(a)(b)(c)は、HDD16に印加される加速度を変化させてディスクとスライダとの静電容量を測定した場合を示している。図7(a)(b)(c)は、いずれもスライダのリフトオフがないレベルの衝撃をHDD16に与えた場合を示している。図7(a)(b)(c)において、距離はアーム(トップ・アーム)の変位であり、加速度はアームに加わる加速度を示している。また、静電容量は、電圧値(V)として表示している。
【0032】
図7(a)は、衝撃の継続時間(デュレーションタイム)が1.83ms、加速度が290Gの場合におけるディスクとスライダとの静電容量の変化を示している。この場合、加速度の変化に対する静電容量の変化は僅かであり、スライダがヘッドに接触することはない。
【0033】
図7(b)は、デュレーションタイムが2.01ms、加速度が341Gの場合におけるディスクとスライダとの静電容量の変化を示している。この場合、加速度が最大となった時点において、図示矢印で示すように、静電容量の変化に振幅の大きなピークが生じている。この時点において、スライダのリフトオフはないが、試験後、ディスク表面を目視により確認した結果、ディスク表面に傷が生じていた。このため、スライダがヘッドに接触したものと判断される。
【0034】
図7(c)は、デュレーションタイムが2.03ms、加速度が419Gの場合におけるディスクとスライダとの静電容量の変化を示している。この場合、加速度が大きく変化した時点において、図示矢印で示すように、静電容量に2つの非常に大きなピークが生じている。この場合も、この時点において、スライダのリフトオフはないが、試験後、ディスク表面を目視により確認した結果、ディスク表面に傷が生じていた。このため、スライダがヘッドに接触したものと判断される。
【0035】
ハイスピードカメラを用いた従来の測定では、受衝時にスライダがリフトオフしない状態において、スライダとディスクとの接触を検出することは困難であった。
【0036】
これに対して、本実施形態によれば、図7(b)(c)に示すように、受衝時にスライダがリフトオフしない状態においても、スライダとディスク間の静電容量の変化を検出することにより、スライダとディスクとの接触を検出することができる。
【0037】
図8(a)(b)は、受衝時におけるアーム、スライダ、ベースプレートのモーション・トラッキングと静電容量の変化を示している。モーション・トラッキングは、例えば加速度センサを用いて、アーム(トップ・アーム)、スライダ、HDDのベースプレートの振動を測定したものである。図8(a)(b)は、いずれもスライダのリフトオフがないレベルの衝撃をHDD16に与えている。
【0038】
モーショント・トラッキングは、例えば静電容量の測定と同時に行われる。このため、例えば加速度センサの出力信号を図1に示す制御部11に供給することにより、静電容量の測定と同時に行うことが可能である。
【0039】
図8(a)に示す場合、デュレーションタイムは2.03msであり、加速度は419Gである。この場合、アームとベースプレートは同相で振動している。しかし、時間0.002〜0.0035(sec)の範囲において、スライダは、アーム及びベースプレートと同相で振動していない。また、静電容量は、この時間範囲において、大きく変化し、スライダとディスクが接触したことが分かる。これより、スライダと、アーム及びベースプレートとが同相で振動していない場合、スライダがディスクに接触することが判明した。
【0040】
図8(b)に示す場合、デュレーションタイムは1.92msであり、加速度は401Gである。すなわち、図8(b)は、図8(a)に比べてHDDへの衝撃が若干小さい場合を示している。この場合、アームとベースプレート、及びスライダが同相で振動している範囲において、静電容量の大きな変化はない。しかし、時間0.0035(sec)の前後において、図8(a)程ではないが、静電容量が変化している。この程度の静電容量の変化では、スライダとディスクが接触することはない。しかし、この時間において、スライダと、アーム及びベースプレートとが同相で振動していない。すなわち、スライダとディスクが接触しない範囲においても、静電容量の変化が増加する場合、スライダと、アーム及びベースプレートとの間に異相振動が発生していることが分かる。
【0041】
スライダ、アーム及びベースプレートは、それぞれ異なる質量を有している。HDDに加速度が加わった場合、加速度の大きさによりスライダ、アーム及びベースプレートの振動周期が変化する。従来、スライダ、アーム及びベースプレートの振動と、スライダとディスクとの接触の関係が明らかではなかった。しかし、図8(a)(b)に示すように、スライダとディスク間の静電容量の変化を検出することにより、静電容量が大きく変化した場合、スライダ、アーム及びベースプレートに異相振動が生じ、スライダとディスクとの接触が生じることが分かった。
【0042】
また、スライダと、アーム及びベースプレートとの異相振動により、スライダとディスクとの接触が生じることが判明したことにより、スライダ、アーム及びベースプレートを含めたHDD構成部品の設計、製造工程において、これらの振動特性をほぼ一致させることが、スライダとディスクとの接触を防止するために重要であることが判明した。
【0043】
図9(a)(b)は、サスペンションとディスクとの接触の関係を示している。受衝時、スライダがディスクに接触する以外に、加速度の大きさによっては、サスペンションがディスクに接触することがある。しかし、従来、どのタイミングでスライダがディスクに接触するのか、ハイスピードカメラやモーション・トラッキングによる観測だけでは分からなかった。これに対して、本実施形態によれば、スライダとディスク間の静電容量の変化を検出しているため、サスペンションやスライダがディスクに接触するタイミングを区別して知ることが可能となった。
【0044】
図9(a)は、HDDのデュレーションタイムが0.55ms、加速度345Gを加えた場合を示している。モーション・トラッキングに示す時間0.003〜0.0035[sec]の範囲において、アームとベースプレートがほぼ同相で振動し、スライダが異相で振動している状態において、静電容量について最初のピークが発生している。このとき、スライダがディスクに接触する。この後、破線で示すように、スライダとアーム及びベースプレートとが逆相となった時点において、ハイスピードカメラの画像に示されるように、サスペンションがディスクに接触していることが分かった。すなわち、従来は、受衝時におけるスライダとサスペンションとの接触タイミングが判明しなかったが、静電容量の変化をモーション・トラッキングとともに時系列に検出することにより、これらの接触タイミングを解明することが可能となった。
【0045】
図9(b)は、HDDのデュレーションタイムが0.96ms、加速度323Gを加えた場合を示している。モーション・トラッキングに示す時間0.0045〜0.005[sec]の範囲において、アームとベースプレートがほぼ同相で振動し、スライダが異相で振動している状態において、静電容量について最初のピークが発生している。このとき、スライダがディスクに接触する。この後、破線で示すように、スライダとアーム及びベースプレートとが逆相となった時点において、ハイスピードカメラの画像に示されるように、ベースプレートがディスクに接触していることが分かった。
【0046】
上記実施形態によれば、スライダとディスク間の静電容量の変化を時系列に検出することにより、スライダのリフトオフが生じない場合におけるスライダとディスクの接触を検出することができる。このため、受衝時におけるスライダ、サスペンション、及びアームの挙動を正確に観察することが可能である。
【0047】
また、スライダの挙動という機械振動で生じる動的、且つ高速な静電容量の変化を電圧変化に変換することにより、高価且つ特殊な測定装置を用いることなく、簡便にnmオーダのスライダの挙動を正確に観察することができる。
【0048】
さらに、静電容量の変化を電圧変化として時系列に記録しているため、例えば汎用のFFT(フーリエ変換)処理により、スライダの挙動の周波数成分を解析することも可能である。
【0049】
尚、上記実施形態において、静電容量検出器13は、包絡線検波器を用いて静電容量の変化を検波した。しかし、これに限定されるものではない。
【0050】
図10は、静電容量検出器13の他の実施形態を示すものであり、位相検波器を用いた例を示している。図10において、図2と同一部分には同一符号を付し、異なる部分についてのみ説明する。
【0051】
図10において、BPF13bの出力信号は増幅器13lを介して位相検波器13mの一方入力端に基準信号として供給される。また、増幅器13hの出力信号は、位相調整回路13nを介して位相検波器13mの他方入力端に供給される。位相検波器13mは、位相調整回路13nの出力信号と基準信号との位相を比較し、その位相差に伴った電圧パルスを出力する。位相検波器13mの出力信号はLPF13jに供給される。位相調整回路13nの調整は、端子13eと端子fからHDD16を外し、この間をショートして得られる位相検波器13mの出力の位相差が、例えば0°となるようにする。
【0052】
この変形例によっても、上記実施形態と同様の効果を得ることができる。
【0053】
さらに、静電容量の検出精度を高めるには、包絡線検波及び位相検波の両方を用い、振幅の変化及び位相の変化の両方を検出してもよい。
【0054】
その他、本発明の要旨を変えない範囲において、種々変形実施可能なことは勿論である。
【符号の説明】
【0055】
11…制御部、12…衝撃試験機制御装置、13…静電容量検出器、14…ハイスピードカメラ、13i…検波器(包絡線検波器)、13m…位相検波器、15…リニア衝撃試験機、16…ハードディスク、16a…ディスク、16b…アーム、16c…サスペンション、16d…スライダ、16e…ケース。
【特許請求の範囲】
【請求項1】
ハードディスク装置のスライダの振動周波数より高い周波数の信号を発生し、前記ハードディスク装置のスライダとディスクの一方に供給する信号源と、
前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として出力する検波器と
を具備することを特徴とする振動特性測定装置。
【請求項2】
前記検波器は、包絡線検波器であることを特徴とする請求項1記載の振動特性測定装置。
【請求項3】
前記検波器は、前記信号源から出力される前記信号と、前記スライダとディスクの他方から出力された信号とに基づき検波する位相検波器であることを特徴とする請求項1記載の振動特性測定装置。
【請求項4】
前記ハードディスク装置の受衝時における前記スライダとディスクの画像を撮影するハイスピードカメラをさらに具備することを特徴とする請求項1記載の振動特性測定装置。
【請求項5】
ハードディスク装置のスライダの振動周波数より高い周波数の信号を、前記ハードディスク装置のスライダとディスクの一方に供給し、
前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として測定することを特徴とする振動特性測定方法。
【請求項6】
前記検波は、包絡線検波であることを特徴とする請求項5記載の振動特性測定方法。
【請求項7】
前記検波は、位相検波であることを特徴とする請求項5記載の振動特性測定方法。
【請求項8】
前記ハードディスク装置の受衝時における前記スライダとディスクの画像をハイスピードカメラにより撮影することを特徴とする請求項5記載の振動特性測定方法。
【請求項1】
ハードディスク装置のスライダの振動周波数より高い周波数の信号を発生し、前記ハードディスク装置のスライダとディスクの一方に供給する信号源と、
前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として出力する検波器と
を具備することを特徴とする振動特性測定装置。
【請求項2】
前記検波器は、包絡線検波器であることを特徴とする請求項1記載の振動特性測定装置。
【請求項3】
前記検波器は、前記信号源から出力される前記信号と、前記スライダとディスクの他方から出力された信号とに基づき検波する位相検波器であることを特徴とする請求項1記載の振動特性測定装置。
【請求項4】
前記ハードディスク装置の受衝時における前記スライダとディスクの画像を撮影するハイスピードカメラをさらに具備することを特徴とする請求項1記載の振動特性測定装置。
【請求項5】
ハードディスク装置のスライダの振動周波数より高い周波数の信号を、前記ハードディスク装置のスライダとディスクの一方に供給し、
前記スライダとディスクの他方から出力された信号を検波し、前記ハードディスク装置の受衝時に、前記スライダとディスク間の静電容量の変化を電圧値として測定することを特徴とする振動特性測定方法。
【請求項6】
前記検波は、包絡線検波であることを特徴とする請求項5記載の振動特性測定方法。
【請求項7】
前記検波は、位相検波であることを特徴とする請求項5記載の振動特性測定方法。
【請求項8】
前記ハードディスク装置の受衝時における前記スライダとディスクの画像をハイスピードカメラにより撮影することを特徴とする請求項5記載の振動特性測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−27474(P2011−27474A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−171454(P2009−171454)
【出願日】平成21年7月22日(2009.7.22)
【出願人】(000004640)日本発條株式会社 (1,048)
【出願人】(508344006)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月22日(2009.7.22)
【出願人】(000004640)日本発條株式会社 (1,048)
【出願人】(508344006)
【Fターム(参考)】
[ Back to top ]