
振動監視装置及び振動監視方法
【課題】貨物自動車の駆動系にかかる振動を監視して、駆動系の故障を予防する技術の提供。
【解決手段】駆動系に設置された振動センサ(S1〜S4)と、それらの検出信号(s1〜s4)をフーリエ変換するフーリエ変換装置(10)(高速フーリエ変換装置FFT)と、フーリエ変換された信号から所定の次数の成分を抽出するフィルター装置(16)と、フィルター装置(16)で抽出された所定の次数の成分と閾値とを比較し且つ比較結果に基いて制御信号を発生する判定装置(20)と、フィルター装置(16)で抽出された所定の次数の成分が閾値よりも大きい場合に警報を発生する警報装置(1b)とを有している。
【解決手段】駆動系に設置された振動センサ(S1〜S4)と、それらの検出信号(s1〜s4)をフーリエ変換するフーリエ変換装置(10)(高速フーリエ変換装置FFT)と、フーリエ変換された信号から所定の次数の成分を抽出するフィルター装置(16)と、フィルター装置(16)で抽出された所定の次数の成分と閾値とを比較し且つ比較結果に基いて制御信号を発生する判定装置(20)と、フィルター装置(16)で抽出された所定の次数の成分が閾値よりも大きい場合に警報を発生する警報装置(1b)とを有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、貨物自動車の駆動系にかかる振動を監視して、駆動系の故障を予防する技術に関する。
【背景技術】
【0002】
駆動系の故障は、単に走行不能な路上故障にとどまらず、重大事故にまで発展する懸念を有している。そのため、駆動計の故障を事前に把握する事は、貨物自動車の安全性向上のために、非常に有効である。
【0003】
駆動系の故障に係る問題の多くは、定期点検や始業点検によって発見され、処置される。
一方、走行時には、走行振動や騒音によって、故障の発見が困難なことがある。そして、不具合の状態が継続あるいは進行することで、走行中における故障や事故の惹起に至ることになる。
ここで、運転する車両が決まっており、且つ、運転者が老練であれば、微妙な音の変化や振動の変化で、異常の多くを検知することができる。しかし、運転する車両が毎回異なる場合には、老練な運転者であっても検知が困難である。そして、運転車両が一定していない場合や、経験が不足している運転者では、駆動系に生じる異常を、適確に報知して、故障や事故を予防することは困難である。
そのため、駆動系の個々の異常を適確に検知して、運転者に報知する技術が望まれていたが、その様な要請に応えることが出来る従来技術は提案されていない。
【0004】
その他の従来技術として、角速度センサが誤動作を起こす可能性のある外部振動周波数帯を検出して制御システムの精度を向上した制御システムが提案されている(特許文献1参照)。
しかし、係る従来技術(特許文献1)は角速度センサの誤動作防止を目的にするものであり、上述した故障や事故を未然に防ぐことを図ることは出来ない。
【0005】
また、ハイブリッド自動車におけるパワートレインの主動力源の振動減衰技術も提案されている(特許文献2参照)。
しかし、この技術(特許文献2)はパワートレインにおける振動減衰技術であり、やはり、故障や事故を未然に防ぐことは出来ない。
【特許文献1】特開2004−294335号公報
【特許文献2】特開2006−36197号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は上述した従来技術の問題点に鑑みて提案されたものであり、貨物自動車の駆動系にかかる振動を監視して、駆動系の故障あるいは故障の前兆を把握する技術の提供を目的としている。
【課題を解決するための手段】
【0007】
発明者は、エンジンから車輪駆動軸にいたる駆動系には、各種の振動が発生している事に着目した。その様な振動としては、例えば、エンジンの回転に起因する振動や、プロプペラシャフトのジョイント部によって生じる回転数の2倍の振動や、ファイナルドライブの終減速比に比例する振動等がある。また、外部からは、ばね下振動による加振、ばね上振動、フレームビーミングによる加振が、駆動系の振動の一因となる。
そして、駆動系におけるこの様な振動は、駆動系における各種の異常や故障の前兆と密接な関係があることに、発明者は着目した。
【0008】
本発明の振動監視装置は、貨物自動車の駆動系に設置された振動センサ(S1、S2、S3、S4)と、該振動センサ(S1、S2、S3、S4)の検出信号(s1、s2、s3、s4)をフーリエ変換するフーリエ変換装置(10)(高速フーリエ変換装置FFT)と、フーリエ変換された信号(Fs1、Fs2、Fs3、Fs4)から所定の次数の成分を抽出するフィルター装置(16)と、フィルター装置(16)で抽出された所定の次数の成分と閾値(18A)とを比較し且つ比較結果に基いて制御信号を発生する判定装置(20)と、フィルター装置(16)で抽出された所定の次数の成分が閾値(18A)よりも大きい場合に判定装置(20)からの制御信号を受信して警報を発生する警報装置(1b)とを有している事を特徴としている(請求項1)。
【0009】
本発明において、前記振動センサ(S1)は、エンジン(D1)に設置されているのが好ましい(請求項2)。
また本発明において、前記振動センサ(S2)は、トランスミッション(D2)に設置されているのが好ましい(請求項3)。
或いは本発明において、前記振動センサ(S3)は、プロペラシャフト(D3)に設置されているのが好ましい(請求項4)。この場合、振動センサの設置位置は、プロペラシャフト(D3)の後端部を支持するセンタベアリングのアウタレースまたはセンタベアリングブラケットの上部が好ましい。
さらに本発明において、前記振動センサ(S4)は、ファイナルドライブ(D6)に設置されているのが好ましい(請求項5)。
【0010】
本発明の振動監視方法は、貨物自動車の駆動系(D1〜D6)に設置された振動センサ(S1、S2、S3、S4)により当該駆動系(D1〜D6)の信号(s1、s2、s3、s4)を検出する振動検出工程と、振動検出工程で振動センサ(S1、S2、S3、S4)が出力した検出信号(s1、s2、s3、s4)をフーリエ変換装置(高速フーリエ変換装置FFT)(10)によりフーリエ変換する変換工程と、変換工程でフーリエ変換された信号(Fs1、Fs2、Fs3、Fs4)からフィルター装置(16)を用いて所定の次数の成分を抽出する抽出工程と、該抽出工程で抽出された所定の次数の成分と閾値(18A)とを比較する比較工程と、該比較工程で抽出された所定の次数の成分が閾値(18A)よりも大きい場合に制御信号を警報装置(22a、22b)に送信する工程とを有する事を特徴としている(請求項6)。
【発明の効果】
【0011】
上述する構成を具備する本発明によれば、振動検出信号をフーリエ変換し、所定の次数を抽出して閾値とを比較しているので、駆動系の部品(例えばエンジン、トランスミッション、プロペラシャフト、ファイナルドライブ等)における故障が進行しているか否かを判断する事が出来る。
そして、抽出された成分の方が閾値よりも大きい場合には、駆動系の部品における故障が進行したと判断して、事故等が発生する以前の段階で警報を発生するので、故障や事故を未然に防止する事が可能である。
【0012】
ここで、振動検出信号をフーリエ変換し、所定の次数を抽出して閾値とを比較すれば判断が可能であるため、余分な入力成分について制御を行う必要が無く、制御が煩雑化することはない。
【0013】
さらに、振動センサを取り付けた部位毎に、振動検出信号をフーリエ変換し、所定の次数を抽出して閾値とを比較する事が出来るので、異常を起こした部位を特定する事が容易であり、修理を迅速に行うことが出来る。
これに加えて、整備上の不手際があったとしても、当該不手際が事故や故障を惹起する可能性があれば直ちに検出して、然るべき処理或いは防止策を図る事が出来る。
【発明を実施するための最良の形態】
【0014】
以下、添付図面を参照して、本発明の実施形態について説明する。
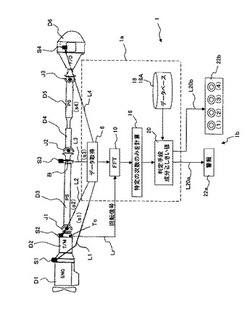
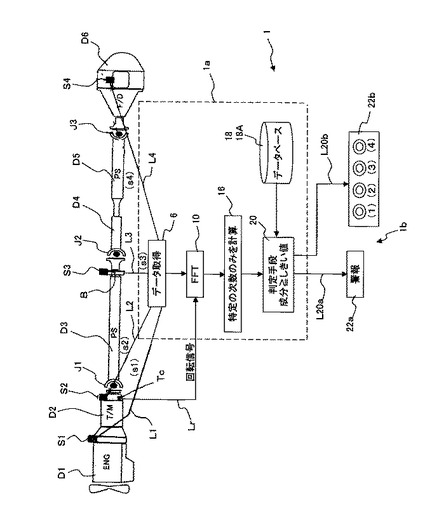
図1の第1実施形態は、通常の長ホイールベースを持つ貨物自動車に本発明を適用した実施形態である。
図1において、全体を符号1で示す監視装置は、駆動系の各々の部分に取り付けられた複数の振動センサ(上下加速度センサ)と、それぞれの振動センサに取り付けられた信号ラインと、演算装置1bと、警告装置1bとで構成されている。
【0015】
より詳細には、図1で示す駆動系では、エンジンD1は、明示しないクラッチを介してトランスミッションD2に連結している。
トランスミッションD2は、ユニバーサルジョイントJ1を介して前プロペラシャフトD3に連結している。
前プロペラシャフトD3の後部は、センタベアリングブラケットBによって、回転自在に支持されている。前プロペラシャフトD3の後端部は、ユニバーサルジョイントJ2を介して、後前プロペラシャフトD4に連結している。
【0016】
後前プロペラシャフトD4は、スプライン結合によって、後後プロペラシャフトD5に摺動自在に連結している。
後後プロペラシャフトD5の後端部は、ユニバーサルジョイントJ3を介して、ファイナルドライブD6に連結している。
【0017】
エンジンD1の後部の上部には、振動センサとして上下加速度センサS1が取り付けられている。上下加速度センサS1は、信号ラインL1を介して、演算装置1aのデータ取得装置6に接続されている。
トランスミッションD2の後部の上部には、上下加速度センサS2が取り付けられている。上下加速度センサS2は、信号ラインL2を介して、データ取得装置6に接続されている。
前プロペラシャフトD3の後端部を支持するセンタベアリングブラケットBの上部に、上下加速度センサS3が取り付けられている。上下加速度センサS3は、信号ラインL3を介して、データ取得装置6に接続されている。
【0018】
ファイナルドライブD6の上部には、上下加速度センサS4が取り付けられている。上下加速度センサS4は、信号ラインL4を介して、データ取得装置6に接続されている。
トランスミッションD2の後端部には、回転速度検出装置Tcが取り付けられている。回転速度検出装置Tcは、信号ラインLrを介して、演算装置1aのフーリエ変換装置10に接続されている。
【0019】
図1において、点線で囲まれた領域は、監視装置1の演算装置1aを示している。
演算装置1aは、データ取得装置6と、フーリエ変換装置10と、フーリエ変換されたデータの中から所定のデータを選択するフィルター装置16と、判定装置20と、データ貯蔵装置18とで構成されている。
【0020】
データ取得装置6は、上下加速度センサS1〜S4で検知された検出信号s1〜s4を継続的に取得して、フーリエ変換装置10に送るように構成されている。
【0021】
フーリエ変換装置10は、駆動系の回転速度の基準となるトランスミッションD2の最終出力回転速度及び検出信号s1〜s4を受信して、検出信号s1〜s4をフーリエ変換する機能を有している。
フーリエ変換された各検出信号Fs1〜Fs4は、複数の次数における成分を重畳したデータとなっている。
【0022】
フィルター装置16は、検出信号Fs1〜Fs4のそれぞれから、フーリエ変換の結果から所定の次数に成分のみを抽出あるいは選択する機能を有している。
なお、フィルター装置16とフーリエ変換装置10とは、保守点検の都合上、同一筐体内にあることが好ましい。
【0023】
判定装置20は、フィルター装置16で抽出あるいは選択したフーリエ変換結果Fs1〜Fs4における所定の次数の成分と、予めデータ貯蔵装置18に貯蔵された異常発生に係る閾値18Aとを比較する機能を有している。そして、各検出信号のフーリエ変換の結果における所定の次数の成分が、閾値18Aを超えていれば、異常が発生したか、あるいは異常が発生する可能性が極めて高いと判断して、警告を送信する機能を有している。
【0024】
データ貯蔵装置18は、駆動系のエンジンD1〜ファイナルドライブD6における異常に対応する数値(フーリエ変換における所定の次数の成分と対応する数値)を、閾値18Aとして記憶している。
【0025】
演算装置1aの結果を警告する警告装置1bは、音による警報装置22aと、発光による警報装置22bとで構成されている。警報装置22bは、駆動系のエンジンD1〜ファイナルドライブD6に対応して発光するように、配置されている。
警報装置22aは、信号ラインL20aを介して、判定装置20に接続されている。警報装置22bは、信号ラインL20bを介して、判定装置20に接続されている。
警報装置22a及び警報装置22bは、運転手のいるキャビン内に取り付けられている。
【0026】
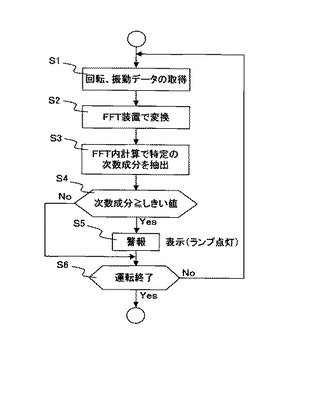
上述した監視装置1の制御について、図2のフローチャートを参照して説明する。
図2において、先ず、運転状態にある駆動系の振動データを取得する。具体的には、上下加速度センサS1〜S4のそれぞれが検出した振動のデータs1〜s4を、データ取得装置6に送出する。それと共に、回転速度検出装置Tcから回転速度データを取得する。(ステップS1:振動検出工程)。
【0027】
ステップS2では、データ取得装置6へ送出された振動のデータs1〜s4及び回転速度検出装置Tcからの回転速度データとに基いて、データs1〜s4のそれぞれを、フーリエ変換装置10で、フーリエ変換する(変換工程)。変換されたデータは、符号Fs1〜Fs4で示されている。
【0028】
ステップS3では、フィルター装置16により、フーリエ変換されたデータFs1〜Fs4における所定の次数の成分のみを抽出する(抽出行程)。
抽出すべき成分は、駆動系における故障に対応する事が過去のデータから確認出来た次数の成分であり、あるいは、駆動系における故障に対応する事が実験的に確認された次数の成分である。
【0029】
ステップS4では、ステップS3で抽出されたフーリエ変換されたデータFs1〜Fs4における所定の次数の成分を、閾値18Aと比較する(比較工程)。
ステップS3で抽出された所定の次数の成分が閾値18Aを上回っていると(ステップS4がYes)、上述した様に、異常が発生したか、あるいは異常が発生する可能性が極めて高いと判断して、音による警報装置22aによって警報を発し、光による警報装置22bによって警報を発する(ステップS5:制御信号を警報装置に送信する工程)。
フーリエ変換されたデータFs1(エンジンD1に係るデータ)における所定の次数の成分が、エンジンD1に係る閾値18Aを上回っている場合には、図1では、警報装置22bにおけるエンジンD1に対応する(1)が発光する。
閾値18Aは駆動系の各部位毎に設定され且つ記憶されており、判定装置20でステップS4に係る判定を行う際に、データ貯蔵装置18内から呼び出される。
【0030】
同様に、トランスミッションD2に関するフーリエ変換されたデータFs2において、所定の次数の成分がトランスミッションD2に係る閾値18Aを上回っている場合には、図1では、警報装置22bにおけるトランスミッションD2に対応する(2)が発光する。
センタベアリングブラケットB及びファイナルドライブD6についても、上述したのと同様に操作が行われる。
【0031】
ステップS3で抽出された所定の次数の成分が閾値18A以下であれば(ステップS4がNo)、異常が発生していないと判断して、運転手へ警報をすることなく、ステップS6に進む。
【0032】
ステップS6では、自動車の運転及び上述した制御を継続するか否かを判断する。
自動車の運転を終了せず、上述した制御を続行するのであれば(ステップS6がNo)、ステップS1に戻って制御作用を継続する。
自動車の運転を終了するのであれば(ステップS6がYes)、制御を終了する。
【0033】
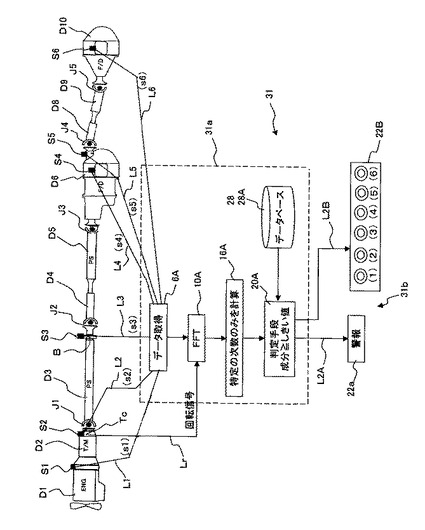
図3は、本発明の第2実施形態を示している。
第2実施形態では、通常の長ホイールベースを持ち、後2軸が2軸ともファイナルドライブを備えた駆動軸の例である。
以下において、第2実施形態が第1実施形態と異なる点を主として説明する。
【0034】
図3において、全体を符号31で示す監視装置は、各駆動系に取り付けられた各振動センサとそれぞれの振動センサに取り付けられた信号ラインと、演算装置31aと、警告装置31bとで構成されている。
【0035】
駆動系では、図1で示す構成に加えて、第1のファイナルドライブD6の後部に出力軸D7が設けられている。
出力軸D7は、ユニバーサルジョイントJ4を介して、第2の後前プロペラシャフトD8に連結している。
第2の後前プロペラシャフトD8は、スプラインを介して、第2の後後プロペラシャフトD9に摺動自在に連結している。
第2の後後プロペラシャフトD9の後端部は、ユニバーサルジョイントJ5を介して、第2のファイナルドライブD10に連結している。
【0036】
出力軸D7の上部の近傍に、上下加速度センサS5が取り付けられている。上下加速度センサS5は、信号ラインL5を介して、データ取得装置6Aに接続されている。
第2のファイナルドライブD10の上部に、上下加速度センサS6が取り付けられている。上下加速度センサS6は、信号ラインL6を介して、データ取得装置6Aに連結されている。
【0037】
トランスミッションD2の後端部に、回転速度検出装置Tcが取り付けられている。回転速度検出装置Tcは、信号ラインLrを介して、演算装置1aのフーリエ変換装置10Aに連結されている。
【0038】
図3において、点線で囲まれた領域は、監視装置31の演算装置31aである。
演算装置31aは、データ取得装置6Aと、フーリエ変換装置10Aと、フーリエ変換されたデータの中から所定のデータを抽出するフィルター装置16Aと、判定装置20Aと、データ貯蔵装置28とを備えている。
各検出信号をフーリエ変換した結果における所定の次数の成分における閾値は、符号28Aで示す。
【0039】
演算装置31aの結果を警告する警告装置31bは、音による警報装置22aと、発光による警報装置22Bとで構成されている。警報装置22Bは、駆動系の各部位、エンジンD1〜第2のファイナルドライブD10に対応するように配列されている。
警報装置22aは、信号ラインL2Aを介して、判定装置20Aに連結されている。
警報装置22Bは、信号ラインL2Bを介して、判定装置20Aに連結されている。
警報装置22a及び警報装置22Bは運転手のいるキャビン内に取り付けられている。
【0040】
図3の第2実施形態におけるその他の構成及び作用効果は、図1、図2で示す第1実施形態と同様である。
【0041】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
【図面の簡単な説明】
【0042】
【図1】本発明の第1実施形態のブロック構成図。
【図2】図1の制御作用を示すフローチャート。
【図3】第2実施形態を示すブロック構成図。
【符号の説明】
【0043】
B・・・・・・・・センタベアリングブラケット
D1・・・・・・・エンジン
D2・・・・・・・トランスミッション
D3・・・・・・・前部プロペラシャフト
D4・・・・・・・後前部プロペラシャフト
D5・・・・・・・後後部プロペラシャフト
D6・・・・・・・ファイナルドライブ
S1、S2、S3、S4、S5、S6・・・第1〜第6振動センサ
s1、s2、s3、s4、s5、s6・・・検出信号
L1、L2、L3、L4、L5、L6・・・信号ライン
1、31・・・・・・・・監視装置
1a、31a・・・・・・・演算装置
1b、31b・・・・・・・警告装置
6、6A・・・・・・・・データ取得装置
10、10A・・・・・・・フーリエ変換装置
16、16A・・・・・・・フィルター装置
18、28・・・・・・・データ貯蔵装置
18A、28A・・・・・・データ判定用の閾値
20、20A・・・・・・・判定装置
22a、22b、22B・・警報装置
【技術分野】
【0001】
本発明は、貨物自動車の駆動系にかかる振動を監視して、駆動系の故障を予防する技術に関する。
【背景技術】
【0002】
駆動系の故障は、単に走行不能な路上故障にとどまらず、重大事故にまで発展する懸念を有している。そのため、駆動計の故障を事前に把握する事は、貨物自動車の安全性向上のために、非常に有効である。
【0003】
駆動系の故障に係る問題の多くは、定期点検や始業点検によって発見され、処置される。
一方、走行時には、走行振動や騒音によって、故障の発見が困難なことがある。そして、不具合の状態が継続あるいは進行することで、走行中における故障や事故の惹起に至ることになる。
ここで、運転する車両が決まっており、且つ、運転者が老練であれば、微妙な音の変化や振動の変化で、異常の多くを検知することができる。しかし、運転する車両が毎回異なる場合には、老練な運転者であっても検知が困難である。そして、運転車両が一定していない場合や、経験が不足している運転者では、駆動系に生じる異常を、適確に報知して、故障や事故を予防することは困難である。
そのため、駆動系の個々の異常を適確に検知して、運転者に報知する技術が望まれていたが、その様な要請に応えることが出来る従来技術は提案されていない。
【0004】
その他の従来技術として、角速度センサが誤動作を起こす可能性のある外部振動周波数帯を検出して制御システムの精度を向上した制御システムが提案されている(特許文献1参照)。
しかし、係る従来技術(特許文献1)は角速度センサの誤動作防止を目的にするものであり、上述した故障や事故を未然に防ぐことを図ることは出来ない。
【0005】
また、ハイブリッド自動車におけるパワートレインの主動力源の振動減衰技術も提案されている(特許文献2参照)。
しかし、この技術(特許文献2)はパワートレインにおける振動減衰技術であり、やはり、故障や事故を未然に防ぐことは出来ない。
【特許文献1】特開2004−294335号公報
【特許文献2】特開2006−36197号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は上述した従来技術の問題点に鑑みて提案されたものであり、貨物自動車の駆動系にかかる振動を監視して、駆動系の故障あるいは故障の前兆を把握する技術の提供を目的としている。
【課題を解決するための手段】
【0007】
発明者は、エンジンから車輪駆動軸にいたる駆動系には、各種の振動が発生している事に着目した。その様な振動としては、例えば、エンジンの回転に起因する振動や、プロプペラシャフトのジョイント部によって生じる回転数の2倍の振動や、ファイナルドライブの終減速比に比例する振動等がある。また、外部からは、ばね下振動による加振、ばね上振動、フレームビーミングによる加振が、駆動系の振動の一因となる。
そして、駆動系におけるこの様な振動は、駆動系における各種の異常や故障の前兆と密接な関係があることに、発明者は着目した。
【0008】
本発明の振動監視装置は、貨物自動車の駆動系に設置された振動センサ(S1、S2、S3、S4)と、該振動センサ(S1、S2、S3、S4)の検出信号(s1、s2、s3、s4)をフーリエ変換するフーリエ変換装置(10)(高速フーリエ変換装置FFT)と、フーリエ変換された信号(Fs1、Fs2、Fs3、Fs4)から所定の次数の成分を抽出するフィルター装置(16)と、フィルター装置(16)で抽出された所定の次数の成分と閾値(18A)とを比較し且つ比較結果に基いて制御信号を発生する判定装置(20)と、フィルター装置(16)で抽出された所定の次数の成分が閾値(18A)よりも大きい場合に判定装置(20)からの制御信号を受信して警報を発生する警報装置(1b)とを有している事を特徴としている(請求項1)。
【0009】
本発明において、前記振動センサ(S1)は、エンジン(D1)に設置されているのが好ましい(請求項2)。
また本発明において、前記振動センサ(S2)は、トランスミッション(D2)に設置されているのが好ましい(請求項3)。
或いは本発明において、前記振動センサ(S3)は、プロペラシャフト(D3)に設置されているのが好ましい(請求項4)。この場合、振動センサの設置位置は、プロペラシャフト(D3)の後端部を支持するセンタベアリングのアウタレースまたはセンタベアリングブラケットの上部が好ましい。
さらに本発明において、前記振動センサ(S4)は、ファイナルドライブ(D6)に設置されているのが好ましい(請求項5)。
【0010】
本発明の振動監視方法は、貨物自動車の駆動系(D1〜D6)に設置された振動センサ(S1、S2、S3、S4)により当該駆動系(D1〜D6)の信号(s1、s2、s3、s4)を検出する振動検出工程と、振動検出工程で振動センサ(S1、S2、S3、S4)が出力した検出信号(s1、s2、s3、s4)をフーリエ変換装置(高速フーリエ変換装置FFT)(10)によりフーリエ変換する変換工程と、変換工程でフーリエ変換された信号(Fs1、Fs2、Fs3、Fs4)からフィルター装置(16)を用いて所定の次数の成分を抽出する抽出工程と、該抽出工程で抽出された所定の次数の成分と閾値(18A)とを比較する比較工程と、該比較工程で抽出された所定の次数の成分が閾値(18A)よりも大きい場合に制御信号を警報装置(22a、22b)に送信する工程とを有する事を特徴としている(請求項6)。
【発明の効果】
【0011】
上述する構成を具備する本発明によれば、振動検出信号をフーリエ変換し、所定の次数を抽出して閾値とを比較しているので、駆動系の部品(例えばエンジン、トランスミッション、プロペラシャフト、ファイナルドライブ等)における故障が進行しているか否かを判断する事が出来る。
そして、抽出された成分の方が閾値よりも大きい場合には、駆動系の部品における故障が進行したと判断して、事故等が発生する以前の段階で警報を発生するので、故障や事故を未然に防止する事が可能である。
【0012】
ここで、振動検出信号をフーリエ変換し、所定の次数を抽出して閾値とを比較すれば判断が可能であるため、余分な入力成分について制御を行う必要が無く、制御が煩雑化することはない。
【0013】
さらに、振動センサを取り付けた部位毎に、振動検出信号をフーリエ変換し、所定の次数を抽出して閾値とを比較する事が出来るので、異常を起こした部位を特定する事が容易であり、修理を迅速に行うことが出来る。
これに加えて、整備上の不手際があったとしても、当該不手際が事故や故障を惹起する可能性があれば直ちに検出して、然るべき処理或いは防止策を図る事が出来る。
【発明を実施するための最良の形態】
【0014】
以下、添付図面を参照して、本発明の実施形態について説明する。
図1の第1実施形態は、通常の長ホイールベースを持つ貨物自動車に本発明を適用した実施形態である。
図1において、全体を符号1で示す監視装置は、駆動系の各々の部分に取り付けられた複数の振動センサ(上下加速度センサ)と、それぞれの振動センサに取り付けられた信号ラインと、演算装置1bと、警告装置1bとで構成されている。
【0015】
より詳細には、図1で示す駆動系では、エンジンD1は、明示しないクラッチを介してトランスミッションD2に連結している。
トランスミッションD2は、ユニバーサルジョイントJ1を介して前プロペラシャフトD3に連結している。
前プロペラシャフトD3の後部は、センタベアリングブラケットBによって、回転自在に支持されている。前プロペラシャフトD3の後端部は、ユニバーサルジョイントJ2を介して、後前プロペラシャフトD4に連結している。
【0016】
後前プロペラシャフトD4は、スプライン結合によって、後後プロペラシャフトD5に摺動自在に連結している。
後後プロペラシャフトD5の後端部は、ユニバーサルジョイントJ3を介して、ファイナルドライブD6に連結している。
【0017】
エンジンD1の後部の上部には、振動センサとして上下加速度センサS1が取り付けられている。上下加速度センサS1は、信号ラインL1を介して、演算装置1aのデータ取得装置6に接続されている。
トランスミッションD2の後部の上部には、上下加速度センサS2が取り付けられている。上下加速度センサS2は、信号ラインL2を介して、データ取得装置6に接続されている。
前プロペラシャフトD3の後端部を支持するセンタベアリングブラケットBの上部に、上下加速度センサS3が取り付けられている。上下加速度センサS3は、信号ラインL3を介して、データ取得装置6に接続されている。
【0018】
ファイナルドライブD6の上部には、上下加速度センサS4が取り付けられている。上下加速度センサS4は、信号ラインL4を介して、データ取得装置6に接続されている。
トランスミッションD2の後端部には、回転速度検出装置Tcが取り付けられている。回転速度検出装置Tcは、信号ラインLrを介して、演算装置1aのフーリエ変換装置10に接続されている。
【0019】
図1において、点線で囲まれた領域は、監視装置1の演算装置1aを示している。
演算装置1aは、データ取得装置6と、フーリエ変換装置10と、フーリエ変換されたデータの中から所定のデータを選択するフィルター装置16と、判定装置20と、データ貯蔵装置18とで構成されている。
【0020】
データ取得装置6は、上下加速度センサS1〜S4で検知された検出信号s1〜s4を継続的に取得して、フーリエ変換装置10に送るように構成されている。
【0021】
フーリエ変換装置10は、駆動系の回転速度の基準となるトランスミッションD2の最終出力回転速度及び検出信号s1〜s4を受信して、検出信号s1〜s4をフーリエ変換する機能を有している。
フーリエ変換された各検出信号Fs1〜Fs4は、複数の次数における成分を重畳したデータとなっている。
【0022】
フィルター装置16は、検出信号Fs1〜Fs4のそれぞれから、フーリエ変換の結果から所定の次数に成分のみを抽出あるいは選択する機能を有している。
なお、フィルター装置16とフーリエ変換装置10とは、保守点検の都合上、同一筐体内にあることが好ましい。
【0023】
判定装置20は、フィルター装置16で抽出あるいは選択したフーリエ変換結果Fs1〜Fs4における所定の次数の成分と、予めデータ貯蔵装置18に貯蔵された異常発生に係る閾値18Aとを比較する機能を有している。そして、各検出信号のフーリエ変換の結果における所定の次数の成分が、閾値18Aを超えていれば、異常が発生したか、あるいは異常が発生する可能性が極めて高いと判断して、警告を送信する機能を有している。
【0024】
データ貯蔵装置18は、駆動系のエンジンD1〜ファイナルドライブD6における異常に対応する数値(フーリエ変換における所定の次数の成分と対応する数値)を、閾値18Aとして記憶している。
【0025】
演算装置1aの結果を警告する警告装置1bは、音による警報装置22aと、発光による警報装置22bとで構成されている。警報装置22bは、駆動系のエンジンD1〜ファイナルドライブD6に対応して発光するように、配置されている。
警報装置22aは、信号ラインL20aを介して、判定装置20に接続されている。警報装置22bは、信号ラインL20bを介して、判定装置20に接続されている。
警報装置22a及び警報装置22bは、運転手のいるキャビン内に取り付けられている。
【0026】
上述した監視装置1の制御について、図2のフローチャートを参照して説明する。
図2において、先ず、運転状態にある駆動系の振動データを取得する。具体的には、上下加速度センサS1〜S4のそれぞれが検出した振動のデータs1〜s4を、データ取得装置6に送出する。それと共に、回転速度検出装置Tcから回転速度データを取得する。(ステップS1:振動検出工程)。
【0027】
ステップS2では、データ取得装置6へ送出された振動のデータs1〜s4及び回転速度検出装置Tcからの回転速度データとに基いて、データs1〜s4のそれぞれを、フーリエ変換装置10で、フーリエ変換する(変換工程)。変換されたデータは、符号Fs1〜Fs4で示されている。
【0028】
ステップS3では、フィルター装置16により、フーリエ変換されたデータFs1〜Fs4における所定の次数の成分のみを抽出する(抽出行程)。
抽出すべき成分は、駆動系における故障に対応する事が過去のデータから確認出来た次数の成分であり、あるいは、駆動系における故障に対応する事が実験的に確認された次数の成分である。
【0029】
ステップS4では、ステップS3で抽出されたフーリエ変換されたデータFs1〜Fs4における所定の次数の成分を、閾値18Aと比較する(比較工程)。
ステップS3で抽出された所定の次数の成分が閾値18Aを上回っていると(ステップS4がYes)、上述した様に、異常が発生したか、あるいは異常が発生する可能性が極めて高いと判断して、音による警報装置22aによって警報を発し、光による警報装置22bによって警報を発する(ステップS5:制御信号を警報装置に送信する工程)。
フーリエ変換されたデータFs1(エンジンD1に係るデータ)における所定の次数の成分が、エンジンD1に係る閾値18Aを上回っている場合には、図1では、警報装置22bにおけるエンジンD1に対応する(1)が発光する。
閾値18Aは駆動系の各部位毎に設定され且つ記憶されており、判定装置20でステップS4に係る判定を行う際に、データ貯蔵装置18内から呼び出される。
【0030】
同様に、トランスミッションD2に関するフーリエ変換されたデータFs2において、所定の次数の成分がトランスミッションD2に係る閾値18Aを上回っている場合には、図1では、警報装置22bにおけるトランスミッションD2に対応する(2)が発光する。
センタベアリングブラケットB及びファイナルドライブD6についても、上述したのと同様に操作が行われる。
【0031】
ステップS3で抽出された所定の次数の成分が閾値18A以下であれば(ステップS4がNo)、異常が発生していないと判断して、運転手へ警報をすることなく、ステップS6に進む。
【0032】
ステップS6では、自動車の運転及び上述した制御を継続するか否かを判断する。
自動車の運転を終了せず、上述した制御を続行するのであれば(ステップS6がNo)、ステップS1に戻って制御作用を継続する。
自動車の運転を終了するのであれば(ステップS6がYes)、制御を終了する。
【0033】
図3は、本発明の第2実施形態を示している。
第2実施形態では、通常の長ホイールベースを持ち、後2軸が2軸ともファイナルドライブを備えた駆動軸の例である。
以下において、第2実施形態が第1実施形態と異なる点を主として説明する。
【0034】
図3において、全体を符号31で示す監視装置は、各駆動系に取り付けられた各振動センサとそれぞれの振動センサに取り付けられた信号ラインと、演算装置31aと、警告装置31bとで構成されている。
【0035】
駆動系では、図1で示す構成に加えて、第1のファイナルドライブD6の後部に出力軸D7が設けられている。
出力軸D7は、ユニバーサルジョイントJ4を介して、第2の後前プロペラシャフトD8に連結している。
第2の後前プロペラシャフトD8は、スプラインを介して、第2の後後プロペラシャフトD9に摺動自在に連結している。
第2の後後プロペラシャフトD9の後端部は、ユニバーサルジョイントJ5を介して、第2のファイナルドライブD10に連結している。
【0036】
出力軸D7の上部の近傍に、上下加速度センサS5が取り付けられている。上下加速度センサS5は、信号ラインL5を介して、データ取得装置6Aに接続されている。
第2のファイナルドライブD10の上部に、上下加速度センサS6が取り付けられている。上下加速度センサS6は、信号ラインL6を介して、データ取得装置6Aに連結されている。
【0037】
トランスミッションD2の後端部に、回転速度検出装置Tcが取り付けられている。回転速度検出装置Tcは、信号ラインLrを介して、演算装置1aのフーリエ変換装置10Aに連結されている。
【0038】
図3において、点線で囲まれた領域は、監視装置31の演算装置31aである。
演算装置31aは、データ取得装置6Aと、フーリエ変換装置10Aと、フーリエ変換されたデータの中から所定のデータを抽出するフィルター装置16Aと、判定装置20Aと、データ貯蔵装置28とを備えている。
各検出信号をフーリエ変換した結果における所定の次数の成分における閾値は、符号28Aで示す。
【0039】
演算装置31aの結果を警告する警告装置31bは、音による警報装置22aと、発光による警報装置22Bとで構成されている。警報装置22Bは、駆動系の各部位、エンジンD1〜第2のファイナルドライブD10に対応するように配列されている。
警報装置22aは、信号ラインL2Aを介して、判定装置20Aに連結されている。
警報装置22Bは、信号ラインL2Bを介して、判定装置20Aに連結されている。
警報装置22a及び警報装置22Bは運転手のいるキャビン内に取り付けられている。
【0040】
図3の第2実施形態におけるその他の構成及び作用効果は、図1、図2で示す第1実施形態と同様である。
【0041】
図示の実施形態はあくまでも例示であり、本発明の技術的範囲を限定する趣旨の記述ではない旨を付記する。
【図面の簡単な説明】
【0042】
【図1】本発明の第1実施形態のブロック構成図。
【図2】図1の制御作用を示すフローチャート。
【図3】第2実施形態を示すブロック構成図。
【符号の説明】
【0043】
B・・・・・・・・センタベアリングブラケット
D1・・・・・・・エンジン
D2・・・・・・・トランスミッション
D3・・・・・・・前部プロペラシャフト
D4・・・・・・・後前部プロペラシャフト
D5・・・・・・・後後部プロペラシャフト
D6・・・・・・・ファイナルドライブ
S1、S2、S3、S4、S5、S6・・・第1〜第6振動センサ
s1、s2、s3、s4、s5、s6・・・検出信号
L1、L2、L3、L4、L5、L6・・・信号ライン
1、31・・・・・・・・監視装置
1a、31a・・・・・・・演算装置
1b、31b・・・・・・・警告装置
6、6A・・・・・・・・データ取得装置
10、10A・・・・・・・フーリエ変換装置
16、16A・・・・・・・フィルター装置
18、28・・・・・・・データ貯蔵装置
18A、28A・・・・・・データ判定用の閾値
20、20A・・・・・・・判定装置
22a、22b、22B・・警報装置
【特許請求の範囲】
【請求項1】
貨物自動車の駆動系に設置された振動センサと、該振動センサの検出信号をフーリエ変換するフーリエ変換装置と、フーリエ変換された信号から所定の次数の成分を抽出するフィルター装置と、フィルター装置で抽出された所定の次数の成分と閾値とを比較し且つ比較結果に基いて制御信号を発生する判定装置と、フィルター装置で抽出された所定の次数の成分が閾値よりも大きい場合に判定装置からの制御信号を受信して警報を発生する警報装置とを有することを特徴とする振動監視装置。
【請求項2】
前記振動センサは、エンジンに設置されている請求項1の振動監視装置。
【請求項3】
前記振動センサは、トランスミッションに設置されている請求項1、2の何れかの振動監視装置。
【請求項4】
前記振動センサは、プロペラシャフトに設置されている請求項1〜3の何れか1項の振動監視装置。
【請求項5】
前記振動センサは、ファイナルドライブに設置されている請求項1〜4の何れか1項の振動監視装置。
【請求項6】
貨物自動車の駆動系に設置された振動センサにより当該駆動系の信号を検出する振動検出工程と、振動検出工程で振動センサが出力した検出信号をフーリエ変換装置によりフーリエ変換する変換工程と、変換工程でフーリエ変換された信号からフィルター装置を用いて所定の次数の成分を抽出する抽出工程と、該抽出工程で抽出された所定の次数の成分と閾値とを比較する比較工程と、該比較工程で抽出された所定の次数の成分が閾値よりも大きい場合に制御信号を警報装置に送信する工程とを有していることを特徴とする振動監視方法。
【請求項1】
貨物自動車の駆動系に設置された振動センサと、該振動センサの検出信号をフーリエ変換するフーリエ変換装置と、フーリエ変換された信号から所定の次数の成分を抽出するフィルター装置と、フィルター装置で抽出された所定の次数の成分と閾値とを比較し且つ比較結果に基いて制御信号を発生する判定装置と、フィルター装置で抽出された所定の次数の成分が閾値よりも大きい場合に判定装置からの制御信号を受信して警報を発生する警報装置とを有することを特徴とする振動監視装置。
【請求項2】
前記振動センサは、エンジンに設置されている請求項1の振動監視装置。
【請求項3】
前記振動センサは、トランスミッションに設置されている請求項1、2の何れかの振動監視装置。
【請求項4】
前記振動センサは、プロペラシャフトに設置されている請求項1〜3の何れか1項の振動監視装置。
【請求項5】
前記振動センサは、ファイナルドライブに設置されている請求項1〜4の何れか1項の振動監視装置。
【請求項6】
貨物自動車の駆動系に設置された振動センサにより当該駆動系の信号を検出する振動検出工程と、振動検出工程で振動センサが出力した検出信号をフーリエ変換装置によりフーリエ変換する変換工程と、変換工程でフーリエ変換された信号からフィルター装置を用いて所定の次数の成分を抽出する抽出工程と、該抽出工程で抽出された所定の次数の成分と閾値とを比較する比較工程と、該比較工程で抽出された所定の次数の成分が閾値よりも大きい場合に制御信号を警報装置に送信する工程とを有していることを特徴とする振動監視方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−74985(P2009−74985A)
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願番号】特願2007−245283(P2007−245283)
【出願日】平成19年9月21日(2007.9.21)
【出願人】(000003908)日産ディーゼル工業株式会社 (1,028)
【Fターム(参考)】
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願日】平成19年9月21日(2007.9.21)
【出願人】(000003908)日産ディーゼル工業株式会社 (1,028)
【Fターム(参考)】
[ Back to top ]