
振動移動装置

【課題】 ギヤやリンク等の部品を使用することなく、きわめて簡単な機構で移動を可能とする振動移動装置を提供する。
【解決手段】 移動体本体11と、移動体本体11に備えられ、移動体本体11の外周に沿って進行する振動波を発生させる振動発生手段17と、振動発生手段17の動作を制御する制御手段15と、移動体本体11に取り付けられる弾性を有する複数の支持手段21と、支持手段21の下部側に設けられ、方向によって接地面Gとの摩擦抵抗の異なるソール部材23とを備え、振動発生手段17によって移動体本体11の外周に沿って進行する振動波を発生させることにより、支持手段21を介して接地面Gに作用する振動波の反作用によって移動体本体11を移動させることを特徴とする。
【解決手段】 移動体本体11と、移動体本体11に備えられ、移動体本体11の外周に沿って進行する振動波を発生させる振動発生手段17と、振動発生手段17の動作を制御する制御手段15と、移動体本体11に取り付けられる弾性を有する複数の支持手段21と、支持手段21の下部側に設けられ、方向によって接地面Gとの摩擦抵抗の異なるソール部材23とを備え、振動発生手段17によって移動体本体11の外周に沿って進行する振動波を発生させることにより、支持手段21を介して接地面Gに作用する振動波の反作用によって移動体本体11を移動させることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、振動移動装置に関し、さらに詳しくは、移動体本体内に設けられた振動発生手段により移動体本体の外周に沿って振動が進行する進行性振動波を発生させ、この振動波を移動体本体に設けられた支持手段を介して接地面に作用させ、その反作用によって移動体本体を移動させる小型ロボット(マイクロロボット)の移動手段となるような振動移動装置に関する。
【背景技術】
【0002】
従来のマイクロロボットは、比較的大型のロボットの機構をそのまま小型化したものが多く、従って車輪や歩行装置等に組み込まれたギヤやリンク等もロボット本体の小型化の為にはそれら複雑な部品を小型化して組立てる必要があった。
また、大きさが10mm以下のマイクロロボットになると、周囲の環境の物性、例えば、水の粘性などが与える影響が通常のロボットの場合と大きく異なるため車輪や歩行装置等の接地面積が極めて小さい場合にはそのような手段による移動は困難であり、周囲の環境の変化への対応が難しい。
【0003】
ところで、駆動機構を構成する動力源の一つとして振動波モータが知られている。例えば、特開平7−79579号公報には振動波モータが開示されている。また、振動を利用して物体を移動させる装置としてはパーツフィーダーなどが知られており、さらに振動そのものを利用した移動装置を使ったロボットや玩具も多数販売されている。また、振動発生源に使用されている質量物の慣性を利用して移動するロボットも知られている。
【0004】
【特許文献1】特開平7−79579号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、従来の振動を利用して移動する装置や振動の慣性を利用する装置にあっては、多くの場合、進行方向を方向転換させるために複数の振動装置を設けたり、そのための機構を設ける必要があるなど構成が複雑で且つ使用する部品点数も多くなるという問題があった。
【0006】
また、上述のように、小型のマイクロロボットの移動機構を通常の大きさのロボットの移動機構と同様の構造でサイズをそのまま小さくしたようなものとした場合にはギヤやリンク等の部品の製造及び組み立てが煩雑で困難となることはもちろん、周囲の環境から受ける影響が大きくなるため意図した通りに動作しないというおそれがある。
【0007】
そこで、本発明は上記事情に鑑み、ギヤやリンク等の部品を使用することなく、きわめて簡単な機構で移動を可能とする振動移動装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために請求項1に記載の本発明は、移動体本体と、移動体本体に備えられ、移動体本体の外周に沿って進行する振動波を発生させる振動発生手段と、振動発生手段の動作を制御する制御手段と、移動体本体に取り付けられる弾性を有する支持手段と、支持手段の下部側に設けられ、方向によって接地面との摩擦抵抗の異なるソール部材とを備え、振動発生手段によって移動体本体の外周に沿って進行する振動波を発生させることにより、支持手段を介して接地面に作用する振動波の反作用によって移動体本体を移動させることを特徴とする振動移動装置を提供する。
【0009】
移動体本体内に設けられた振動発生手段により移動体本体の外周に沿って振動が進行する進行性振動波(外周波)を発生させ、この振動波を移動体本体に設けられた支持手段を介して接地面に作用させ、その反作用によって移動体本体を移動させる。
【0010】
上記課題を解決するために請求項2に記載の本発明は、請求項1に記載の振動移動装置において、制御手段は、遠隔操作可能なコントローラ又は携帯電話から発せられる指示信号に基づいて振動発生手段を制御するように構成されたことを特徴とする。
【0011】
移動装置の移動方向の変更制御は有線・無線或いは赤外線を利用したコントローラ又は携帯電話によって遠隔操作することによって行われる。
【0012】
上記課題を解決するために請求項3に記載の本発明は、請求項1又は2に記載の振動移動装置において、移動体本体は密閉構造とされていることを特徴とする。
従来のロボットが通常備えている車輪や歩行装置等が必要とする軸受け部(摺動部)を必要としないため、移動体本体を完全密閉構造とすることが可能となる。
【0013】
上記課題を解決するために請求項4に記載の本発明は、請求項1から3のいずれか1項に記載の動移動装置において、振動発生手段は、偏心モータ、圧電素子、ボイスコイルモータであることを特徴とする。
【発明の効果】
【0014】
本発明に係る振動移動装置によれば、接地面との接地部分に、方向によって接地面との摩擦抵抗の異なるソール部材を設けたので、少なくとも1つの振動発生手段を有することで振動波の進行方向(外周波の進行方向)を制御するだけで方向転換を行うことが可能となるという効果がある。
【0015】
また、本発明に係る振動移動装置によれば、タイヤ、ギヤ、リンク機構などといった部品を使用しないので、振動移動装置の構造が極めて簡略化されるという効果がある。その結果、振動移動装置の更なる小型化を可能とし、ひいては大量生産、低コストの実現に大いに貢献するという効果がある。
【0016】
さらに、従来の車輪や歩行装置などとは異なり、軸受けなどの摺動部が存在しないので装置の寿命も長く、また移動体本体を完全密閉構造とすることができるという効果がある。
【0017】
さらに、本発明に係る振動移動装置によれば、振動を発生する振動発生手段として偏心モータ、圧電素子、ボイスコイルモータを使用することで駆動機構を構成するための部品はほとんど必要なくなるため極小のマイクロマシンを製造することが可能となるという効果がある。
【発明を実施するための最良の形態】
【0018】
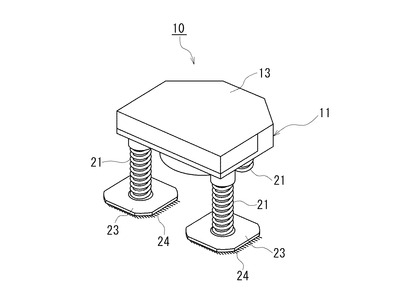
本発明に係る振動移動装置について図面を参照しつつ以下詳細に説明する。図1は本発明に係る振動移動装置の一実施形態の斜視図、図2はその分解斜視図である。
【0019】
初めに、図示された振動移動装置10は、概略として、移動体本体11と、移動体本体11に備えられた振動発生手段である偏心モータ17と、振動発生手段の動作を制御する制御手段である制御装置15と、移動体本体11に取り付けられた支持手段である脚21と、脚21の下部側に設けられたソール部材である織物片23を備えて構成されている。
【0020】
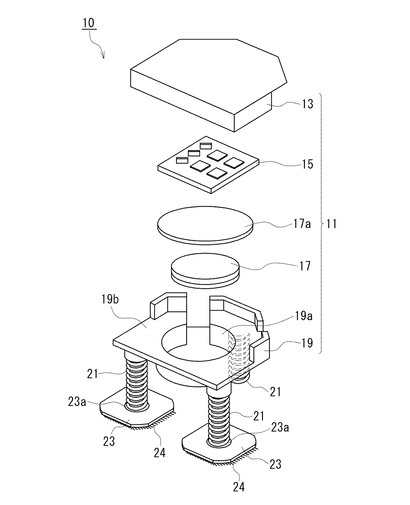
移動体本体11は、制御装置15、偏心モータ17、さらにはボタン電池17aなどのパーツ類を収容する筐体であり、本実施形態では平面形状がいわゆる概略ホームベース形を有している。移動体本体11の形状は特に本実施形態のような形状に限定されるものではなく、円筒形状、角筒形状、ティアドロップ形状などの適宜の形状を採用することができる。移動体本体11は、その内部に上述した各パーツを収容するための空間を備えた本体部19と、本体部19を密閉保持するための蓋体13を備えている。本体部19及び蓋体13は合成樹脂や金属等適宜の材質の材料を用いて形成することができる。合成樹脂の場合には所望の形状への加工が容易となるので好ましい素材といえる。また、本体部19と蓋体13を完全密閉化しても外部に摺動部などがないので振動移動装置10の動作には影響がない。そのため本体部19と蓋体13を接着剤による接着や加熱による溶着等の手段により完全密閉化とすることができる。この場合、フッ素樹脂等の薬品等に侵されにくいエンジニアリングプラスチックを用いれば過酷な条件下において振動移動装置10を用いることも可能となる。
【0021】
本体部19の内部には後述する偏心モータ17を収納するための収容部19aと、制御装置15を収納するための収容部19bが形成されており、偏心モータ17と制御装置15がそれぞれ本体部19内に収容配置されるようになっている。そして、本体部19の縁部に立設された壁面上縁部は蓋体13と当接するようになっており、本体部19の周縁部と蓋体13の周縁部を接着又は溶着することで移動体本体11の完全密閉を図ることができるようになっている。
【0022】
本体部19に収容配置される偏心モータ17は、モータを回転させた際に振動を生じさせる構造を備えたモータである。振動を発生させる仕組みとしては、モータの回転の軸心を偏心させることによって振動を発生させるものや、モータの軸に偏心おもりを取り付けることにより振動を発生させるものなどがある。振動移動装置10の場合には特にその構造には左右されるものではない。また、振動を発生させる振動発生手段としては偏心モータ17の他にも圧電素子、ボイスコイルモータを用いることもできる。圧電素子は圧電体に加えられた力を電圧に変換し又は電圧を力に変換する圧電効果を利用した受動素子であり、電圧を印加することで圧電素子が伸びたり縮んだりする歪む性質を利用して振動を発生させるものである。圧電素子を移動体本体11の外縁に沿って複数配置して順番に電圧を印加することにより振動波を発生させることができる。印加の順番を時計方向又は反時計方向に行うことで振動波の方向を変えることができる。一方、ボイスコイルモータは動電型振動装置であり、スピーカの原理を発展的に応用したもので、リニアモータとして幅広く利用されている。ボイスコイルモータを圧電素子と同様に移動体本体11の外縁に沿って複数配置して順番に電圧を印加することにより振動波を発生させることができる。
【0023】
制御装置15は偏心モータ17の動作を制御する装置であり、基板上に各種の電子部材が実装されて形成されている。制御装置15は偏心モータ17の動作、制動、停止、さらには回転方向の切り替え等の信号を発生させて偏心モータ17の動作を制御する。ここで、制御装置15は、有線や無線、例えば、電波や赤外線などによって遠隔操作可能なコントローラ又は携帯電話から発せられる電波や赤外線による指示信号に基づいて偏心モータ17の動作を制御するように構成されている。これにより、コントローラ又は携帯電話によって離れた場所から振動移動装置10の動作・停止や進行方向の切り替えなどの操作を行うことが可能とされている。
【0024】
また、移動体本体11の底面には脚21が3箇所に取り付けられている。本実施形態における脚21はコイルバネが用いられている。脚21は、偏心モータ17の回転によって移動体本体11内で発生する振動波を接地面に対して作用させ、その反作用を効果的に利用するために弾性を有する部材によって形成されている。コイルバネは金属製でも合成樹脂製でも構わない。また、コイルバネ以外でも板バネやトーションバネ、ブラシなど細い繊維状のものが束になったようなもの等も使用可能である。その他としては、例えば、合成樹脂や天然ゴム又は合成ゴム等の材質から構成される部材を用いることも可能である。尚、コイルバネの強さを適宜変更することで振動移動装置10の動作特性を変えることもできる。
【0025】
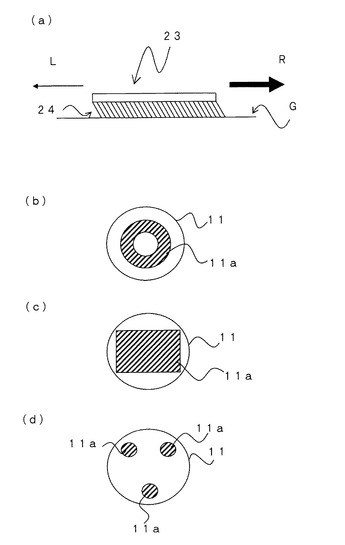
本実施形態では移動体本体11に3つの脚21が取り付けられているが、特に3つに限定されることはなく、移動体本体11の形状に基づき移動体本体11を支持可能な数だけ取り付ければよい。脚21の取り付け位置としては、図3(b)〜(d)に示すような位置に取り付けることが可能である。すなわち、図3(b)〜(d)は移動体本体11の底面を示す図であり、斜線部分が脚21を取り付けるのに適した位置11aを示している。具体的には、図3(b)は移動体本体11の裏側に外周に沿って隙間なく脚21を配置したものを示している。図3(c)は移動体本体11の裏側の中央部に大型の脚21を一つ配置したものを示している。図3(d)は3つの脚21を移動体本体11の裏側の中心から等距離でそれぞれの間隔(角度)の位置に配置した状態を示している。尚、脚21の高さは振動移動装置10全体の大きさや振動モータ17の出力によって異なるが、高すぎる(長すぎる)と振動波が接地面Gにうまく伝わらず、逆に低すぎる(短すぎる)と振動波の発生が乱れるので脚21の長さは振動波の中心から移動体本体11の外縁までの長さとすることが好ましい。
【0026】
脚21の下端部には、さらに、方向によって摩擦抵抗の異なるソール部材である織物片23が取り付けられている。織物片23は、具体的には図3(a)に示すような、一方向に向かって倒れるようにして植毛された毛24を有するビロードのような織物を小片にしたものである。このような構成の織物片23は、図3(a)のL方向には接地面Gとの摩擦抵抗が小さいので僅かな力を加えただけでも接地面G上を移動するが、R方向には毛24の摩擦が大きいので接地面G上での動きが制限されることとなる。このような作用を有する織物片23を脚21の下端部に、振動移動装置10の進行方向側が図3(a)における織物片23のL方向と一致するようにして取り付ける。尚、脚21への織物片23の取り付けは織物片23の上面に設けられた嵌合凹部23aを脚21へ嵌合させることによって着脱自在に取り付けられている。着脱自在としたのは織物片23を交換可能とするためである。また、ソール部材としては上述の織物片23の他にも、のこぎりの歯のような断面を持つブラシのようなものも採用可能である。また、本実施形態のように脚21を2本以上備えている場合には隣り合った2本にだけ取り付けることが好ましい。織物片23の大きさや位置は振動波の大きさ、移動体本体11の大きさ、脚21の配置によって異なる。織物片23の配置の原則は、移動体本体11が時計方向に回転するとき、接地面Gとの摩擦が大きくなるような位置に少なくとも1ヵ所、移動体本体11が反時計方向に回転するとき、接地面Gとの摩擦が大きくなるような位置に少なくとも1ヵ所の計2ヵ所に設けるとよい。この原則に従えば織物片23の取り付け位置や大きさは任意とすることができる。つまり、任意の2か所に摩擦抵抗の異なる部分が存在するようにしてソール部材を配置すればよいことになる。
【0027】
これまで説明してきたように移動体本体11の大きさ、振動波の大きさ、脚21の長さ、接地面Gの特性などの条件によって振動移動装置10の移動の特性が変わる。各条件の関係を踏まえて振動移動装置10をうまく動作させるためには以下のように調整するとよい。
(1)移動体本体11の重量に比較して振動波が大きい場合には脚21の弾性を弱く(柔らかく)する。
(2)移動体本体11の重量に比較して振動波が小さい場合には脚21の弾性を高い(硬く)する。
(3)移動体本体11の重量に比較して脚21の弾性が高い(硬い)場合には振動波を弱くする。
(4)移動体本体11の重量に比較して脚21の弾性が低い(柔らかい)場合には振動波を強くする。
(5)接地面Gが軟らかい場合には振動波を大きくするか又は脚21の弾性を高く(硬く)する。
(6)接地面Gが硬い場合には振動波を小さくするか又は脚21の弾性を低く(柔らかく)する。
ここで、振動波が相対的に高い場合には移動体本体11は振動しかせず、ランダムに飛び跳ねるような状態となる。逆に、振動波が相対的に低くい場合には振動波が脚21で吸収されてしまうため移動体本体11は動かない。そのため、振動センサによって振動を計測し、移動体本体11の振動は大きいのに移動体本体11の回転が小さい場合は振動波を小さくする。また、移動体本体11の振動が小さく、移動体本体11の回転も小さい場合は、振動波を大きくする、といったように制御装置15を制御するとよい。
【0028】
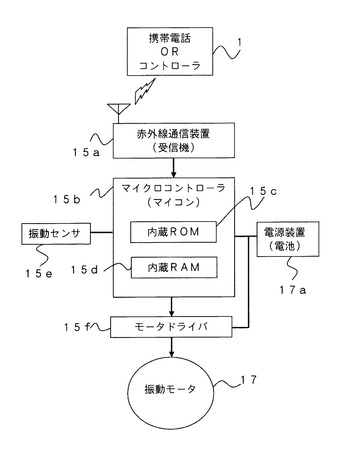
ここで、制御装置15のブロック図を図4に示す。制御装置15は、いわゆるマイクロコンピュータが有するハード構成を備えたマイクロコントローラ15bと、記憶装置として内蔵ROM15c及び内蔵RAM15dを搭載している。マイクロコントローラ15aは赤外線通信装置15aと接続され、赤外線通信装置15aはコントローラ又は携帯電話1から送信されてくる制御指令を受信する受信機の役割を果たす。内蔵ROM15c及び/又は内蔵RAM15dにはモータドライバ15fを制御するためのプログラムが格納されており、赤外線信号により送られてきた制御装置15に対する制御指令に基づいて内蔵ROM15c又は内蔵RAM15dに格納されたプログラムが動作してモータドライバ15fを動作させ、それによって振動モータ17の動きを制御するように構成されている。具体的には、振動モータ17の動作状態は正転、逆転、停止、制動の4つの状態があり、これを制御装置15によって制御する。また、制御装置15を動作させるプログラムをサーバに記録保存しておき、そのプログラムをコンピュータや携帯電話によってダウンロードし、それを内蔵RAM15dにインストールすることで内蔵RAM15d内に格納させるような構成とすれば振動移動装置10に周囲の環境に合わせた動作や個性的な動作など様々な動作を行わせることができると共に、制御プログラムの改変も容易に行うことが可能となる。
【0029】
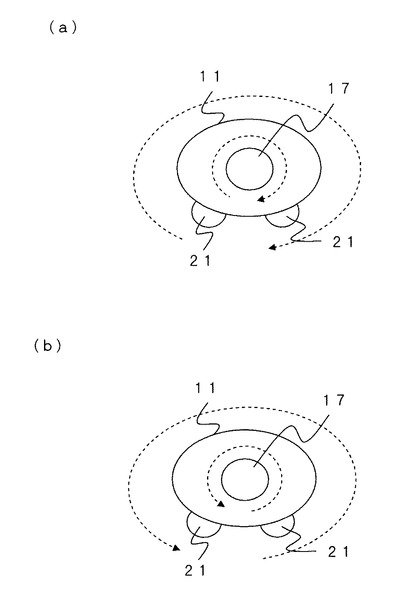
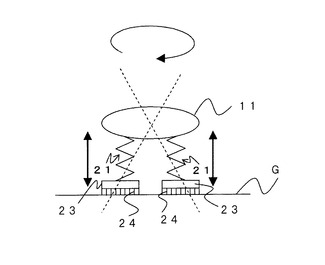
次に、上述した振動移動装置10の動作について説明する。本発明に係る振動移動装置は、従来のロボットに採用されている車輪や歩行装置などとは全く異なる移動方法を実現している。図5(a)(b)はそれぞれ振動移動装置10を上から見たときの回転の様子を簡略化して示した図である。初めに、図5(a)に示すように、偏心モータ17を時計回り方向に回転させると、移動体本体11は偏心モータ17の回転に伴って振動する。移動体本体11は弾性体であるコイルバネによって形成された脚21を介して接地面Gと接地しているので移動体本体11の内部にある偏心モータ17が回転すると回転面に対して水平方向(ヨー)だけでなく垂直の方向にも振れようとする。この振動は移動体本体11の外周に対して周期的な振動として現れる。弾性体である脚21は周期的にやってくる前記振動がやってくるとそれを吸収するようにして縮んで力を蓄え、振動波が通り過ぎたらその力を開放する。これが順次繰り返される結果、図6に示すように、移動体本体11は振動波が移動体本体11の外周を沿って移動進行するのに伴ってコマが回っているときに軸が振れるような歳差運動(いわゆる「すりこぎ運動」)を行うことになる。
【0030】
ここで、図7に示したA点、B点での上下方向の動きを時間軸に沿って見てみると図8に示すように、偏心モータ17の回転により移動体本体11の外周に沿って偏心モータ17の回転方向と同じ方向に振動波が発生する。これは、移動体本体11の外周に発生した進行波として捉えることができる。すなわち、移動体本体11の外周に沿って移動する振動波は脚21を介して接地面Gに作用することになる。そして、接地面Gが振動移動装置10の質量よりはるかに大きいか固定されている場合、振動波は周期的に脚21への加重・開放を繰り返すことになる。そのため、移動体本体11は脚21から振動波の反作用を受けている状態となり、脚21の上に位置する移動体本体11は、見かけ上、自ら発生した振動波に乗ったような状態となる。そして、その振動波は移動体本体11を振動波の方向に押し進める力として働く。その結果、振動移動装置10の重量が発生した振動波の力に比べて小さい場合、振動移動装置10は振動波の方向、つまり偏心モータ17の回転方向と同じ方向に回転することになる。従って、偏心モータ17の回転方向を反対にすれば振動移動装置10も反対に回転する。
【0031】
また、移動体本体11の回転を促進する要素としては次の要因がある。移動体本体11は極めて短い周期で振動しているので振動の機械的特性により振動移動装置10全体が浮き上がったようになり脚21と接地面Gの接地摩擦が著しく低減する。これにより、振動移動装置10は容易に回転運動を行うことができる。
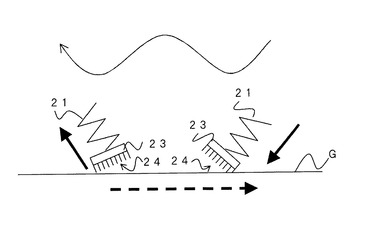
さらに、脚21は移動体本体11の外周を進行する振動波とは逆方向に接地面Gを蹴るような動きによって回転運動が促される。すなわち、図9に示すように、移動体本体11の外周を進行する振動波は移動体本体11をすりこぎ運動させるので振動波が脚21を押圧する場合には内側下方向に向かって作用する(図9の下向き矢印方向)。そして、振動波が通り過ぎて脚21に対する押圧力が解放される際には脚21は外側上方向に向かって力が解放される(上向き矢印方向)ことになる。その結果、脚21は接地面Gを蹴るような動きとなるので振動移動装置10の回転がさらに促進される。
【0032】
このように、振動移動装置10は、偏心モータ17の回転方向と同じ方向に回転するので偏心モータ17の回転方向を変えれば振動移動装置10も回転方向が変わる(図4(a)(b)参照)。ここで、移動体本体11の回転の中心は振動波の中心とほぼ同じであるが、偏心モータ17の中心と振動波の中心は異なる場合がある。これは、脚21の取り付け位置により振動波の中心が変化するためである。しかし、偏心モータ17の中心と振動波の中心とはなるべく近いほうが好ましい。
【0033】
次に、振動移動装置10の前進及び方向変換について説明する。図10(a)に示すように、コントローラ又は携帯電話1を介して制御装置15から偏心モータ17に対して時計方向に回転させる信号を送出させる。当該信号を受けた偏心モータ17は、時計方向に回転する。それに伴って移動体本体11の周囲には時計方向に進行する振動波が発生し、移動体本体11は偏心モータ17と同じ時計方向に回転する。移動体本体11が時計方向に回転すると脚21aの下端部に取り付けられた織物片23の毛24の存在により移動体本体11の回転方向における接地面Gとの摩擦が増加する。これに対して脚21bの下部に取り付けられた織物片23の毛24は回転方向における接地面Gとの摩擦抵抗が少ないので移動体本体11は時計方向に回転する。
【0034】
移動体本体11が回転し、脚21bが進行方向(矢印方向)に向かって移動し、図10(a)に示す状態となったら、コントローラ又は携帯電話1を介して制御装置15から偏心モータ17を反時計方向に回転させる信号を送出させ、偏心モータ17を反時計方向に回転させる。すると、移動体本体11も反時計方向に回転するが今度は脚21bの接地面Gとの接地摩擦が増加し、脚21aの接地面Gとの接地摩擦が減少するので移動体本体11は脚21bを中心に回転反時計方向に回転する。このように、偏心モータ17の回転方向を交互に変えることにより振動波の方向を交互に変え、それによって振動移動装置10はすり足のような移動方法で前進させることができる。そして、振動移動装置10の進行方向を任意の方向に向けたい場合には、振動移動装置10が任意の方向に向くまで、時計方向又は反時計方向のどちらか一方の回転を続け、任意の方向に向いたところで回転を止めればよい。また、そのような動作を連続させることで360度ターンも可能である。そして、振動移動装置10が所望の方向を向いたときに振動移動装置10を前進させれば自由な方向に方向変換させることができる。
【0035】
偏心モータ17の回転を制御する制御装置15に対する命令は、有線や無線、例えば、電波や赤外線などによって遠隔操作可能な図示しないコントローラ又は携帯電話1から発せられる指示信号に基づいて行われる。また、偏心モータ17の出力の制御は電圧の変化によって行うことが可能であるが、具体的には直列に配線した可変抵抗を変化させる方法や半導体アンプによる方法がある。また、ごく短い時間でスイッチのON/OFFを繰り返して制御するPWMと呼ばれる方法があり、モータドライバをマイコンで制御することでPWM制御を行うことができる。
【0036】
以上のように、本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能であることはいうまでもない。
【図面の簡単な説明】
【0037】
【図1】本発明に係る振動移動装置の一実施形態の斜視図である。
【図2】図1の振動移動装置の分解斜視図である。
【図3】(a)は織物片の側面図、(b)〜(d)は脚の取り付け位置を示す図である。
【図4】制御装置のブロック図である。
【図5】(a)(b)はそれぞれ移動体本体の回転を示す説明図である。
【図6】移動体本体の歳差運動を示す説明図である。
【図7】移動体本体の異なる位置での振動波の作用を示す説明図である。
【図8】図7の作用を示すグラフである。
【図9】脚の動作を示す説明図である。
【図10】振動移動装置の進行状態を示す平面図である
【符号の説明】
【0038】
10 振動移動装置
11 移動体本体
13 蓋体
15 制御装置
17 偏心モータ
19 本体部
19a 収容部
19b 収容部
21 脚
23 織物片
23a 嵌合凹部
【技術分野】
【0001】
本発明は、振動移動装置に関し、さらに詳しくは、移動体本体内に設けられた振動発生手段により移動体本体の外周に沿って振動が進行する進行性振動波を発生させ、この振動波を移動体本体に設けられた支持手段を介して接地面に作用させ、その反作用によって移動体本体を移動させる小型ロボット(マイクロロボット)の移動手段となるような振動移動装置に関する。
【背景技術】
【0002】
従来のマイクロロボットは、比較的大型のロボットの機構をそのまま小型化したものが多く、従って車輪や歩行装置等に組み込まれたギヤやリンク等もロボット本体の小型化の為にはそれら複雑な部品を小型化して組立てる必要があった。
また、大きさが10mm以下のマイクロロボットになると、周囲の環境の物性、例えば、水の粘性などが与える影響が通常のロボットの場合と大きく異なるため車輪や歩行装置等の接地面積が極めて小さい場合にはそのような手段による移動は困難であり、周囲の環境の変化への対応が難しい。
【0003】
ところで、駆動機構を構成する動力源の一つとして振動波モータが知られている。例えば、特開平7−79579号公報には振動波モータが開示されている。また、振動を利用して物体を移動させる装置としてはパーツフィーダーなどが知られており、さらに振動そのものを利用した移動装置を使ったロボットや玩具も多数販売されている。また、振動発生源に使用されている質量物の慣性を利用して移動するロボットも知られている。
【0004】
【特許文献1】特開平7−79579号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、従来の振動を利用して移動する装置や振動の慣性を利用する装置にあっては、多くの場合、進行方向を方向転換させるために複数の振動装置を設けたり、そのための機構を設ける必要があるなど構成が複雑で且つ使用する部品点数も多くなるという問題があった。
【0006】
また、上述のように、小型のマイクロロボットの移動機構を通常の大きさのロボットの移動機構と同様の構造でサイズをそのまま小さくしたようなものとした場合にはギヤやリンク等の部品の製造及び組み立てが煩雑で困難となることはもちろん、周囲の環境から受ける影響が大きくなるため意図した通りに動作しないというおそれがある。
【0007】
そこで、本発明は上記事情に鑑み、ギヤやリンク等の部品を使用することなく、きわめて簡単な機構で移動を可能とする振動移動装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために請求項1に記載の本発明は、移動体本体と、移動体本体に備えられ、移動体本体の外周に沿って進行する振動波を発生させる振動発生手段と、振動発生手段の動作を制御する制御手段と、移動体本体に取り付けられる弾性を有する支持手段と、支持手段の下部側に設けられ、方向によって接地面との摩擦抵抗の異なるソール部材とを備え、振動発生手段によって移動体本体の外周に沿って進行する振動波を発生させることにより、支持手段を介して接地面に作用する振動波の反作用によって移動体本体を移動させることを特徴とする振動移動装置を提供する。
【0009】
移動体本体内に設けられた振動発生手段により移動体本体の外周に沿って振動が進行する進行性振動波(外周波)を発生させ、この振動波を移動体本体に設けられた支持手段を介して接地面に作用させ、その反作用によって移動体本体を移動させる。
【0010】
上記課題を解決するために請求項2に記載の本発明は、請求項1に記載の振動移動装置において、制御手段は、遠隔操作可能なコントローラ又は携帯電話から発せられる指示信号に基づいて振動発生手段を制御するように構成されたことを特徴とする。
【0011】
移動装置の移動方向の変更制御は有線・無線或いは赤外線を利用したコントローラ又は携帯電話によって遠隔操作することによって行われる。
【0012】
上記課題を解決するために請求項3に記載の本発明は、請求項1又は2に記載の振動移動装置において、移動体本体は密閉構造とされていることを特徴とする。
従来のロボットが通常備えている車輪や歩行装置等が必要とする軸受け部(摺動部)を必要としないため、移動体本体を完全密閉構造とすることが可能となる。
【0013】
上記課題を解決するために請求項4に記載の本発明は、請求項1から3のいずれか1項に記載の動移動装置において、振動発生手段は、偏心モータ、圧電素子、ボイスコイルモータであることを特徴とする。
【発明の効果】
【0014】
本発明に係る振動移動装置によれば、接地面との接地部分に、方向によって接地面との摩擦抵抗の異なるソール部材を設けたので、少なくとも1つの振動発生手段を有することで振動波の進行方向(外周波の進行方向)を制御するだけで方向転換を行うことが可能となるという効果がある。
【0015】
また、本発明に係る振動移動装置によれば、タイヤ、ギヤ、リンク機構などといった部品を使用しないので、振動移動装置の構造が極めて簡略化されるという効果がある。その結果、振動移動装置の更なる小型化を可能とし、ひいては大量生産、低コストの実現に大いに貢献するという効果がある。
【0016】
さらに、従来の車輪や歩行装置などとは異なり、軸受けなどの摺動部が存在しないので装置の寿命も長く、また移動体本体を完全密閉構造とすることができるという効果がある。
【0017】
さらに、本発明に係る振動移動装置によれば、振動を発生する振動発生手段として偏心モータ、圧電素子、ボイスコイルモータを使用することで駆動機構を構成するための部品はほとんど必要なくなるため極小のマイクロマシンを製造することが可能となるという効果がある。
【発明を実施するための最良の形態】
【0018】
本発明に係る振動移動装置について図面を参照しつつ以下詳細に説明する。図1は本発明に係る振動移動装置の一実施形態の斜視図、図2はその分解斜視図である。
【0019】
初めに、図示された振動移動装置10は、概略として、移動体本体11と、移動体本体11に備えられた振動発生手段である偏心モータ17と、振動発生手段の動作を制御する制御手段である制御装置15と、移動体本体11に取り付けられた支持手段である脚21と、脚21の下部側に設けられたソール部材である織物片23を備えて構成されている。
【0020】
移動体本体11は、制御装置15、偏心モータ17、さらにはボタン電池17aなどのパーツ類を収容する筐体であり、本実施形態では平面形状がいわゆる概略ホームベース形を有している。移動体本体11の形状は特に本実施形態のような形状に限定されるものではなく、円筒形状、角筒形状、ティアドロップ形状などの適宜の形状を採用することができる。移動体本体11は、その内部に上述した各パーツを収容するための空間を備えた本体部19と、本体部19を密閉保持するための蓋体13を備えている。本体部19及び蓋体13は合成樹脂や金属等適宜の材質の材料を用いて形成することができる。合成樹脂の場合には所望の形状への加工が容易となるので好ましい素材といえる。また、本体部19と蓋体13を完全密閉化しても外部に摺動部などがないので振動移動装置10の動作には影響がない。そのため本体部19と蓋体13を接着剤による接着や加熱による溶着等の手段により完全密閉化とすることができる。この場合、フッ素樹脂等の薬品等に侵されにくいエンジニアリングプラスチックを用いれば過酷な条件下において振動移動装置10を用いることも可能となる。
【0021】
本体部19の内部には後述する偏心モータ17を収納するための収容部19aと、制御装置15を収納するための収容部19bが形成されており、偏心モータ17と制御装置15がそれぞれ本体部19内に収容配置されるようになっている。そして、本体部19の縁部に立設された壁面上縁部は蓋体13と当接するようになっており、本体部19の周縁部と蓋体13の周縁部を接着又は溶着することで移動体本体11の完全密閉を図ることができるようになっている。
【0022】
本体部19に収容配置される偏心モータ17は、モータを回転させた際に振動を生じさせる構造を備えたモータである。振動を発生させる仕組みとしては、モータの回転の軸心を偏心させることによって振動を発生させるものや、モータの軸に偏心おもりを取り付けることにより振動を発生させるものなどがある。振動移動装置10の場合には特にその構造には左右されるものではない。また、振動を発生させる振動発生手段としては偏心モータ17の他にも圧電素子、ボイスコイルモータを用いることもできる。圧電素子は圧電体に加えられた力を電圧に変換し又は電圧を力に変換する圧電効果を利用した受動素子であり、電圧を印加することで圧電素子が伸びたり縮んだりする歪む性質を利用して振動を発生させるものである。圧電素子を移動体本体11の外縁に沿って複数配置して順番に電圧を印加することにより振動波を発生させることができる。印加の順番を時計方向又は反時計方向に行うことで振動波の方向を変えることができる。一方、ボイスコイルモータは動電型振動装置であり、スピーカの原理を発展的に応用したもので、リニアモータとして幅広く利用されている。ボイスコイルモータを圧電素子と同様に移動体本体11の外縁に沿って複数配置して順番に電圧を印加することにより振動波を発生させることができる。
【0023】
制御装置15は偏心モータ17の動作を制御する装置であり、基板上に各種の電子部材が実装されて形成されている。制御装置15は偏心モータ17の動作、制動、停止、さらには回転方向の切り替え等の信号を発生させて偏心モータ17の動作を制御する。ここで、制御装置15は、有線や無線、例えば、電波や赤外線などによって遠隔操作可能なコントローラ又は携帯電話から発せられる電波や赤外線による指示信号に基づいて偏心モータ17の動作を制御するように構成されている。これにより、コントローラ又は携帯電話によって離れた場所から振動移動装置10の動作・停止や進行方向の切り替えなどの操作を行うことが可能とされている。
【0024】
また、移動体本体11の底面には脚21が3箇所に取り付けられている。本実施形態における脚21はコイルバネが用いられている。脚21は、偏心モータ17の回転によって移動体本体11内で発生する振動波を接地面に対して作用させ、その反作用を効果的に利用するために弾性を有する部材によって形成されている。コイルバネは金属製でも合成樹脂製でも構わない。また、コイルバネ以外でも板バネやトーションバネ、ブラシなど細い繊維状のものが束になったようなもの等も使用可能である。その他としては、例えば、合成樹脂や天然ゴム又は合成ゴム等の材質から構成される部材を用いることも可能である。尚、コイルバネの強さを適宜変更することで振動移動装置10の動作特性を変えることもできる。
【0025】
本実施形態では移動体本体11に3つの脚21が取り付けられているが、特に3つに限定されることはなく、移動体本体11の形状に基づき移動体本体11を支持可能な数だけ取り付ければよい。脚21の取り付け位置としては、図3(b)〜(d)に示すような位置に取り付けることが可能である。すなわち、図3(b)〜(d)は移動体本体11の底面を示す図であり、斜線部分が脚21を取り付けるのに適した位置11aを示している。具体的には、図3(b)は移動体本体11の裏側に外周に沿って隙間なく脚21を配置したものを示している。図3(c)は移動体本体11の裏側の中央部に大型の脚21を一つ配置したものを示している。図3(d)は3つの脚21を移動体本体11の裏側の中心から等距離でそれぞれの間隔(角度)の位置に配置した状態を示している。尚、脚21の高さは振動移動装置10全体の大きさや振動モータ17の出力によって異なるが、高すぎる(長すぎる)と振動波が接地面Gにうまく伝わらず、逆に低すぎる(短すぎる)と振動波の発生が乱れるので脚21の長さは振動波の中心から移動体本体11の外縁までの長さとすることが好ましい。
【0026】
脚21の下端部には、さらに、方向によって摩擦抵抗の異なるソール部材である織物片23が取り付けられている。織物片23は、具体的には図3(a)に示すような、一方向に向かって倒れるようにして植毛された毛24を有するビロードのような織物を小片にしたものである。このような構成の織物片23は、図3(a)のL方向には接地面Gとの摩擦抵抗が小さいので僅かな力を加えただけでも接地面G上を移動するが、R方向には毛24の摩擦が大きいので接地面G上での動きが制限されることとなる。このような作用を有する織物片23を脚21の下端部に、振動移動装置10の進行方向側が図3(a)における織物片23のL方向と一致するようにして取り付ける。尚、脚21への織物片23の取り付けは織物片23の上面に設けられた嵌合凹部23aを脚21へ嵌合させることによって着脱自在に取り付けられている。着脱自在としたのは織物片23を交換可能とするためである。また、ソール部材としては上述の織物片23の他にも、のこぎりの歯のような断面を持つブラシのようなものも採用可能である。また、本実施形態のように脚21を2本以上備えている場合には隣り合った2本にだけ取り付けることが好ましい。織物片23の大きさや位置は振動波の大きさ、移動体本体11の大きさ、脚21の配置によって異なる。織物片23の配置の原則は、移動体本体11が時計方向に回転するとき、接地面Gとの摩擦が大きくなるような位置に少なくとも1ヵ所、移動体本体11が反時計方向に回転するとき、接地面Gとの摩擦が大きくなるような位置に少なくとも1ヵ所の計2ヵ所に設けるとよい。この原則に従えば織物片23の取り付け位置や大きさは任意とすることができる。つまり、任意の2か所に摩擦抵抗の異なる部分が存在するようにしてソール部材を配置すればよいことになる。
【0027】
これまで説明してきたように移動体本体11の大きさ、振動波の大きさ、脚21の長さ、接地面Gの特性などの条件によって振動移動装置10の移動の特性が変わる。各条件の関係を踏まえて振動移動装置10をうまく動作させるためには以下のように調整するとよい。
(1)移動体本体11の重量に比較して振動波が大きい場合には脚21の弾性を弱く(柔らかく)する。
(2)移動体本体11の重量に比較して振動波が小さい場合には脚21の弾性を高い(硬く)する。
(3)移動体本体11の重量に比較して脚21の弾性が高い(硬い)場合には振動波を弱くする。
(4)移動体本体11の重量に比較して脚21の弾性が低い(柔らかい)場合には振動波を強くする。
(5)接地面Gが軟らかい場合には振動波を大きくするか又は脚21の弾性を高く(硬く)する。
(6)接地面Gが硬い場合には振動波を小さくするか又は脚21の弾性を低く(柔らかく)する。
ここで、振動波が相対的に高い場合には移動体本体11は振動しかせず、ランダムに飛び跳ねるような状態となる。逆に、振動波が相対的に低くい場合には振動波が脚21で吸収されてしまうため移動体本体11は動かない。そのため、振動センサによって振動を計測し、移動体本体11の振動は大きいのに移動体本体11の回転が小さい場合は振動波を小さくする。また、移動体本体11の振動が小さく、移動体本体11の回転も小さい場合は、振動波を大きくする、といったように制御装置15を制御するとよい。
【0028】
ここで、制御装置15のブロック図を図4に示す。制御装置15は、いわゆるマイクロコンピュータが有するハード構成を備えたマイクロコントローラ15bと、記憶装置として内蔵ROM15c及び内蔵RAM15dを搭載している。マイクロコントローラ15aは赤外線通信装置15aと接続され、赤外線通信装置15aはコントローラ又は携帯電話1から送信されてくる制御指令を受信する受信機の役割を果たす。内蔵ROM15c及び/又は内蔵RAM15dにはモータドライバ15fを制御するためのプログラムが格納されており、赤外線信号により送られてきた制御装置15に対する制御指令に基づいて内蔵ROM15c又は内蔵RAM15dに格納されたプログラムが動作してモータドライバ15fを動作させ、それによって振動モータ17の動きを制御するように構成されている。具体的には、振動モータ17の動作状態は正転、逆転、停止、制動の4つの状態があり、これを制御装置15によって制御する。また、制御装置15を動作させるプログラムをサーバに記録保存しておき、そのプログラムをコンピュータや携帯電話によってダウンロードし、それを内蔵RAM15dにインストールすることで内蔵RAM15d内に格納させるような構成とすれば振動移動装置10に周囲の環境に合わせた動作や個性的な動作など様々な動作を行わせることができると共に、制御プログラムの改変も容易に行うことが可能となる。
【0029】
次に、上述した振動移動装置10の動作について説明する。本発明に係る振動移動装置は、従来のロボットに採用されている車輪や歩行装置などとは全く異なる移動方法を実現している。図5(a)(b)はそれぞれ振動移動装置10を上から見たときの回転の様子を簡略化して示した図である。初めに、図5(a)に示すように、偏心モータ17を時計回り方向に回転させると、移動体本体11は偏心モータ17の回転に伴って振動する。移動体本体11は弾性体であるコイルバネによって形成された脚21を介して接地面Gと接地しているので移動体本体11の内部にある偏心モータ17が回転すると回転面に対して水平方向(ヨー)だけでなく垂直の方向にも振れようとする。この振動は移動体本体11の外周に対して周期的な振動として現れる。弾性体である脚21は周期的にやってくる前記振動がやってくるとそれを吸収するようにして縮んで力を蓄え、振動波が通り過ぎたらその力を開放する。これが順次繰り返される結果、図6に示すように、移動体本体11は振動波が移動体本体11の外周を沿って移動進行するのに伴ってコマが回っているときに軸が振れるような歳差運動(いわゆる「すりこぎ運動」)を行うことになる。
【0030】
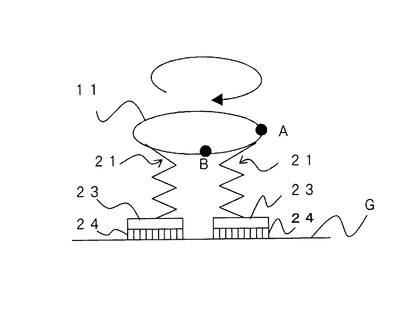
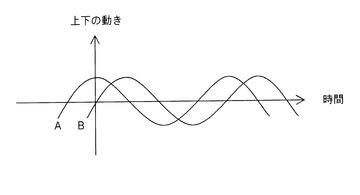
ここで、図7に示したA点、B点での上下方向の動きを時間軸に沿って見てみると図8に示すように、偏心モータ17の回転により移動体本体11の外周に沿って偏心モータ17の回転方向と同じ方向に振動波が発生する。これは、移動体本体11の外周に発生した進行波として捉えることができる。すなわち、移動体本体11の外周に沿って移動する振動波は脚21を介して接地面Gに作用することになる。そして、接地面Gが振動移動装置10の質量よりはるかに大きいか固定されている場合、振動波は周期的に脚21への加重・開放を繰り返すことになる。そのため、移動体本体11は脚21から振動波の反作用を受けている状態となり、脚21の上に位置する移動体本体11は、見かけ上、自ら発生した振動波に乗ったような状態となる。そして、その振動波は移動体本体11を振動波の方向に押し進める力として働く。その結果、振動移動装置10の重量が発生した振動波の力に比べて小さい場合、振動移動装置10は振動波の方向、つまり偏心モータ17の回転方向と同じ方向に回転することになる。従って、偏心モータ17の回転方向を反対にすれば振動移動装置10も反対に回転する。
【0031】
また、移動体本体11の回転を促進する要素としては次の要因がある。移動体本体11は極めて短い周期で振動しているので振動の機械的特性により振動移動装置10全体が浮き上がったようになり脚21と接地面Gの接地摩擦が著しく低減する。これにより、振動移動装置10は容易に回転運動を行うことができる。
さらに、脚21は移動体本体11の外周を進行する振動波とは逆方向に接地面Gを蹴るような動きによって回転運動が促される。すなわち、図9に示すように、移動体本体11の外周を進行する振動波は移動体本体11をすりこぎ運動させるので振動波が脚21を押圧する場合には内側下方向に向かって作用する(図9の下向き矢印方向)。そして、振動波が通り過ぎて脚21に対する押圧力が解放される際には脚21は外側上方向に向かって力が解放される(上向き矢印方向)ことになる。その結果、脚21は接地面Gを蹴るような動きとなるので振動移動装置10の回転がさらに促進される。
【0032】
このように、振動移動装置10は、偏心モータ17の回転方向と同じ方向に回転するので偏心モータ17の回転方向を変えれば振動移動装置10も回転方向が変わる(図4(a)(b)参照)。ここで、移動体本体11の回転の中心は振動波の中心とほぼ同じであるが、偏心モータ17の中心と振動波の中心は異なる場合がある。これは、脚21の取り付け位置により振動波の中心が変化するためである。しかし、偏心モータ17の中心と振動波の中心とはなるべく近いほうが好ましい。
【0033】
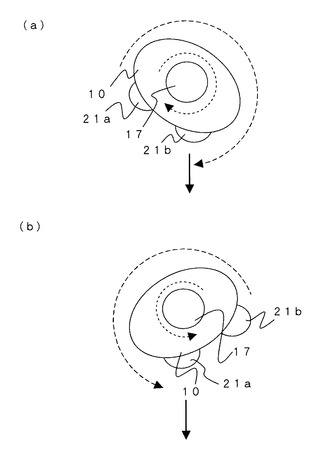
次に、振動移動装置10の前進及び方向変換について説明する。図10(a)に示すように、コントローラ又は携帯電話1を介して制御装置15から偏心モータ17に対して時計方向に回転させる信号を送出させる。当該信号を受けた偏心モータ17は、時計方向に回転する。それに伴って移動体本体11の周囲には時計方向に進行する振動波が発生し、移動体本体11は偏心モータ17と同じ時計方向に回転する。移動体本体11が時計方向に回転すると脚21aの下端部に取り付けられた織物片23の毛24の存在により移動体本体11の回転方向における接地面Gとの摩擦が増加する。これに対して脚21bの下部に取り付けられた織物片23の毛24は回転方向における接地面Gとの摩擦抵抗が少ないので移動体本体11は時計方向に回転する。
【0034】
移動体本体11が回転し、脚21bが進行方向(矢印方向)に向かって移動し、図10(a)に示す状態となったら、コントローラ又は携帯電話1を介して制御装置15から偏心モータ17を反時計方向に回転させる信号を送出させ、偏心モータ17を反時計方向に回転させる。すると、移動体本体11も反時計方向に回転するが今度は脚21bの接地面Gとの接地摩擦が増加し、脚21aの接地面Gとの接地摩擦が減少するので移動体本体11は脚21bを中心に回転反時計方向に回転する。このように、偏心モータ17の回転方向を交互に変えることにより振動波の方向を交互に変え、それによって振動移動装置10はすり足のような移動方法で前進させることができる。そして、振動移動装置10の進行方向を任意の方向に向けたい場合には、振動移動装置10が任意の方向に向くまで、時計方向又は反時計方向のどちらか一方の回転を続け、任意の方向に向いたところで回転を止めればよい。また、そのような動作を連続させることで360度ターンも可能である。そして、振動移動装置10が所望の方向を向いたときに振動移動装置10を前進させれば自由な方向に方向変換させることができる。
【0035】
偏心モータ17の回転を制御する制御装置15に対する命令は、有線や無線、例えば、電波や赤外線などによって遠隔操作可能な図示しないコントローラ又は携帯電話1から発せられる指示信号に基づいて行われる。また、偏心モータ17の出力の制御は電圧の変化によって行うことが可能であるが、具体的には直列に配線した可変抵抗を変化させる方法や半導体アンプによる方法がある。また、ごく短い時間でスイッチのON/OFFを繰り返して制御するPWMと呼ばれる方法があり、モータドライバをマイコンで制御することでPWM制御を行うことができる。
【0036】
以上のように、本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能であることはいうまでもない。
【図面の簡単な説明】
【0037】
【図1】本発明に係る振動移動装置の一実施形態の斜視図である。
【図2】図1の振動移動装置の分解斜視図である。
【図3】(a)は織物片の側面図、(b)〜(d)は脚の取り付け位置を示す図である。
【図4】制御装置のブロック図である。
【図5】(a)(b)はそれぞれ移動体本体の回転を示す説明図である。
【図6】移動体本体の歳差運動を示す説明図である。
【図7】移動体本体の異なる位置での振動波の作用を示す説明図である。
【図8】図7の作用を示すグラフである。
【図9】脚の動作を示す説明図である。
【図10】振動移動装置の進行状態を示す平面図である
【符号の説明】
【0038】
10 振動移動装置
11 移動体本体
13 蓋体
15 制御装置
17 偏心モータ
19 本体部
19a 収容部
19b 収容部
21 脚
23 織物片
23a 嵌合凹部
【特許請求の範囲】
【請求項1】
移動体本体と、
前記移動体本体に備えられ、当該移動体本体の外周に沿って進行する振動波を発生させる振動発生手段と、
前記振動発生手段の動作を制御する制御手段と、
前記移動体本体に取り付けられる弾性を有する支持手段と、
前記支持手段の下部側に設けられ、方向によって接地面との摩擦抵抗の異なるソール部材と、
を備え、
前記振動発生手段によって前記移動体本体の外周に沿って進行する振動波を発生させることにより、前記支持手段を介して接地面に作用する振動波の反作用によって前記移動体本体を移動させることを特徴とする振動移動装置。
【請求項2】
請求項1に記載の振動移動装置において、
前記制御手段は、遠隔操作可能なコントローラ又は携帯電話から発せられる指示信号に基づいて前記振動発生手段を制御するように構成されたことを特徴とする振動移動装置。
【請求項3】
請求項1又は2に記載の振動移動装置において、
前記移動体本体は密閉構造とされていることを特徴とする振動移動装置。
【請求項4】
請求項1から3のいずれか1項に記載の動移動装置において、
前記振動発生手段は、偏心モータ、圧電素子、ボイスコイルモータであることを特徴とする振動移動装置。
【請求項1】
移動体本体と、
前記移動体本体に備えられ、当該移動体本体の外周に沿って進行する振動波を発生させる振動発生手段と、
前記振動発生手段の動作を制御する制御手段と、
前記移動体本体に取り付けられる弾性を有する支持手段と、
前記支持手段の下部側に設けられ、方向によって接地面との摩擦抵抗の異なるソール部材と、
を備え、
前記振動発生手段によって前記移動体本体の外周に沿って進行する振動波を発生させることにより、前記支持手段を介して接地面に作用する振動波の反作用によって前記移動体本体を移動させることを特徴とする振動移動装置。
【請求項2】
請求項1に記載の振動移動装置において、
前記制御手段は、遠隔操作可能なコントローラ又は携帯電話から発せられる指示信号に基づいて前記振動発生手段を制御するように構成されたことを特徴とする振動移動装置。
【請求項3】
請求項1又は2に記載の振動移動装置において、
前記移動体本体は密閉構造とされていることを特徴とする振動移動装置。
【請求項4】
請求項1から3のいずれか1項に記載の動移動装置において、
前記振動発生手段は、偏心モータ、圧電素子、ボイスコイルモータであることを特徴とする振動移動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−125403(P2009−125403A)
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願番号】特願2007−305264(P2007−305264)
【出願日】平成19年11月27日(2007.11.27)
【出願人】(503120254)有限会社擬人機工藝 (1)
【Fターム(参考)】
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願日】平成19年11月27日(2007.11.27)
【出願人】(503120254)有限会社擬人機工藝 (1)
【Fターム(参考)】
[ Back to top ]