
振動試験装置
【課題】
構造物の加振実験を行う振動試験装置において、供試体から受ける特定の周波数成分の反力を補償することで、目標波形信号の再現性を向上させる。
【解決手段】
振動試験装置1は、波形発生装置6、油圧加振機3、供試体2、計測装置5、油圧加振機3の動きを制御する制御装置4を備える。油圧加振機3には供試体2を搭載するテーブル16、または供試体2を直接接続する。供試体2が特定周波数成分の外力を発生する場合、その周波数成分にゲインの最大値を有する外乱補償フィルタ20をテーブル16の加速度信号18aに付加する。
構造物の加振実験を行う振動試験装置において、供試体から受ける特定の周波数成分の反力を補償することで、目標波形信号の再現性を向上させる。
【解決手段】
振動試験装置1は、波形発生装置6、油圧加振機3、供試体2、計測装置5、油圧加振機3の動きを制御する制御装置4を備える。油圧加振機3には供試体2を搭載するテーブル16、または供試体2を直接接続する。供試体2が特定周波数成分の外力を発生する場合、その周波数成分にゲインの最大値を有する外乱補償フィルタ20をテーブル16の加速度信号18aに付加する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体を加振して試験する振動試験装置に関する。
【背景技術】
【0002】
構造物の耐震性能を評価する手法として、振動台を用いた加振実験が広く行われている。加振実験は、振動台上に試験対象物(以下、供試体)を搭載し、油圧アクチュエータを用いて実際の地震波などの加速度波を模擬するように振動台を動作させ、耐震性能を評価するものである。そのため、振動台、油圧アクチュエータなどを含めた振動試験装置には、地震波などの入力信号の正確な再現性が求められ、それを実現するための各種制御手法が提案されている。
【0003】
上記振動試験装置において、地震波の再現性を劣化させる要因として供試体の反力が振動試験装置への外乱として作用することが挙げられる。
【0004】
供試体の反力補償方式としては、特許文献1に開示がある。この公報では、供試体反力を計測し、この反力を相殺する補償信号を生成して制御する例が記載されている。また、その他の方式として、特許文献2に開示がある。この公報では、振動台のフィードバック制御装置内に精度の良い外乱推定補償装置を付加する例が記載されている。
【0005】
【特許文献1】WO97/11344号公報
【特許文献2】特開2006−90761号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記、WO97/11344号公報では、一般の振動台には具備されていない反力を計測するための新たなセンサを付加する必要がある。
【0007】
また、上記特開2006−90761号公報では、観測可能な状態量を用いて外乱推定精度を高める外乱推定補償装置を付加することで、外乱抑圧性能の向上を図っているが、外乱推定補償装置にはセンサノイズの低減や微分動作を回避するためのローパスフィルタを付加する必要があるため、精度良く外乱を補償できる周波数帯域は低周波部分のみに限定される。また、一般に外乱推定補償装置の外乱抑圧性能は−30dB程度であり、その目的はある周波数範囲(例えば1〜10Hz程度)内の外乱抑圧性能の向上に着目したものである。そのため、ある特定の周波数成分のみを持つ大きな反力が振動台に加わった場合には、十分な外乱抑圧性能を確保できない虞がある。
【0008】
上記何れの反力補償方式も、試験対象物の崩壊過程や土槽などのように供試体の反力が時々刻々と変化する場合を想定しており、ある特定の大きな周波数成分を持つ反力が振動台に作用する場合については十分考慮されていない。ここで、ある特定の周波数成分を持つ反力を発生する供試体としては、例えばモータやタービンなどの回転体を含む構造物がある。これらは主に駆動周波数に起因した振動により供試体自体が常に発生している反力として振動台に作用し、地震波の再現性を劣化させる。
【0009】
上記問題点を鑑み、本発明は、ある特定の周波数成分を持つ反力を発生する供試体の振動試験を行う際に、反力を推定するためのセンサを新たに付加する必要が無く、かつある特定の周波数成分の外乱抑圧性能を向上させる補償装置を付加するのみで、特定周波数の反力を補償し地震波の再現性を向上させることができる振動試験装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、供試体を搭載するテーブルと、前記供試体または前記テーブルを加振する油圧加振機と、前記油圧加振機または前記テーブルまたは前記供試体の動作状態を計測する計測装置と、前記供試体または前記テーブルで再現すべき目標波形信号を生成する波形発生装置と、前記油圧加振機の動作を制御するための制御装置を備えた振動試験装置において、前記油圧加振機は、作動油を供給するための油圧源と、電気信号により前記作動油のシリンダへの供給量を調整するサーボ弁と、継手を介して前記供試体または前記テーブルへ動力を伝達する軸と、前記作動油の圧力を受けるピストンとを具備し、前記計測装置は、前記軸の変位と、前記供試体または前記テーブルの加速度と、前記ピストンで仕切られた前記シリンダ内の作動油の圧力差とを検出するセンサおよび計測器を具備し、前記制御装置は、前記変位と前記加速度と前記差圧の検出信号と、前記目標波形から前記サーボ弁への電気信号を生成するものであって、前記制御装置内に前記供試体から受ける反力を抑制する反力補償手段を有することを特徴とする振動試験装置。
【0011】
前記反力補償手段は前記加速度の検出信号を入力とするフィルタであって、前記フィルタのゲイン特性は凸形状を示し、前記供試体から受ける反力の周波数にゲインが最大値となる周波数特性を有し、前記フィルタの分子、分母の角周波数の差が2×π×0[rad/s]から2×π×10[rad/s]の間とする。
【0012】
また、前記供試体が回転体を有する場合、前記回転体の駆動周波数を検出し、その検出信号を基に前記フィルタの角周波数を決定し、前記駆動周波数が変動した場合、その変動に合わせて前記フィルタの角周波数を更新させる。
【0013】
また、前記回転体の駆動周波数を、前記供試体または前記テーブルでの前記目標波形信号の理想信号と前記供試体または前記テーブルでの前記目標波形信号の実信号との誤差を基に推定し、前記推定値を前記フィルタの角周波数とする。
【0014】
前記理想信号は、前記振動試験装置の数値モデルにより計算された信号、若しくは、前記供試体が回転しないときに加振した、前記供試体または前記テーブルでの実信号とする。
【0015】
前記目標波形信号を入力とした、第一のフィードフォワード補償器と第二のフィードフォワード補償器と前記反力補償手段と同一のフィルタの出力信号を前記制御装置に加算する。
【0016】
また、前記第一のフィードフォワード補償器と前記第二のフィードフォワード補償器は、それぞれの補償器の分子は、制御対象である前記サーボ弁と前記油圧加振機と前記テーブルと前記供試体の伝達関数の分子、分母であり、それぞれの補償器の分母は、前記制御対象における分子と分母の相対次数以上の次数となるローパスフィルタとする。
【発明の効果】
【0017】
本発明によれば、振動試験装置において特定の周波数成分の外乱抑圧特性を向上させることが可能となる。そのため、ある特定の周波数成分を有する大きな反力を発生する供試体に対しても、地震波を忠実に振動台で再現することができるため、正確な振動試験を行うことができる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の一実施例について図面を用いて説明する。
【実施例1】
【0019】
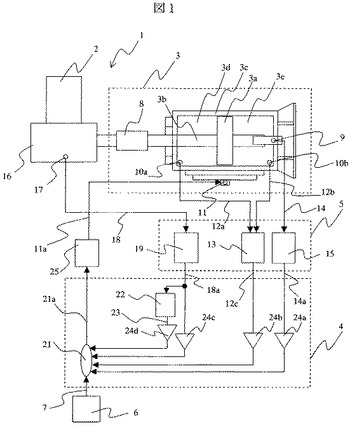
図1は従来から用いられている振動試験装置1の1軸方向のみを表した基本システム図である。振動試験装置1は、供試体2を搭載するテーブル16と、テーブル16を介して供試体2を加振する油圧加振機3と、この油圧加振機3を制御する制御装置4と、油圧加振機3ならびにテーブル16の動作状態を計測する計測装置5を有する。制御装置4には、波形発生装置6が生成した地震加速度波形などの目標波形信号7が入力される。油圧加振機3のほぼ中央部には、受圧用のピストン3aを取り付けた軸3bがシリンダ3cを貫通しており、一方の貫通側は継手8に取り付けられている。軸3bの他端側には、油圧加振機3の変位を検出する変位センサ9が取り付けられている。
【0020】
シリンダ3c内には作動油が充満されており、ピストン3aにより仕切られたシリンダ3c内の2つの空間3d、3eのそれぞれに対応して、作動油の圧力を検出する圧力センサ10a、10bが設けられている。シリンダ3cの側部には、サーボ弁11が取り付けられており、2つの空間3d、3eへの供給油圧を制御する。各圧力センサ10a、10bが検出した圧力信号12a、12bは、計測装置5が有する圧力検出器13に入力される。同様に変位センサ9が検出した変位信号14は、計測装置5が有する変位計15に、テーブル16に取り付けられた加速度センサ17が検出した加速度信号18は加速度計19に入力される。圧力検出器13では、シリンダ3cの2つの空間3d、3eの圧力差を求める。
【0021】
上記構成の振動試験装置1の動作を以下に説明する。波形発生装置6が、制御装置4にテーブル16で再現する目標波形信号7を入力する。制御装置4に入力された目標波形信号7は減算器21に送られる。計測装置5の変位計15の出力信号14a、圧力検出器13の出力信号12c、加速度計19の出力信号18a、加速度計19の出力信号18aを積分器22に入力して得られた速度信号23は、それぞれ変位フィードバックゲイン24a、差圧フィードバックゲイン24b、加速度フィードバックゲイン24c、速度フィードバックゲイン24dを乗じた後、減算器21に送られ、目標波形信号7に対して減算される。上記制御装置4での各演算処理は、例えばディジタルシグナルプロセッサーなどの高速演算処理装置により実現される。
【0022】
減算器21の出力信号21aは、サーボアンプ25に入力される。サーボアンプ25で出力信号21aが増幅されて、サーボ弁11への指令信号11aが生成される。サーボ弁11に指令信号11aが入力されると、図示しない油圧源から作動油が供給され、それに伴い油圧加振機3の軸3bが紙面左右方向に駆動され、軸3bに取り付けた継手8、テーブル16を介して供試体2を加振する。このとき、供試体2が加振されることでテーブル16に反力が加わる。この反力は、テーブル16若しくは振動試験装置1への外乱となる。この外乱は、前述した各フィードバック信号を用いたフィードバック制御系の有する外乱抑圧性能により、その影響を十分に抑圧する。若しくは、従来から提案されている外乱推定補償装置などを用いることで影響を抑えることができる。なお、図1に示す振動試験装置1には、図示はしていないが加速度計19の出力信号18a、圧力検出器13の出力信号12cのそれぞれには直流成分および観測ノイズを除去するためのフィルタが具備されている。
【0023】
ここで、供試体2が、例えばモータやタービンなどの動的な要素を含む場合、加振の有無に係わらず、駆動周波数などに起因したある特定の周波数の反力がテーブル16に加わる。この反力は、先の説明の通り、テーブル16若しくは振動試験装置1への特定周波数外乱26となる。以下に、この特定周波数外乱26を抑圧するための方法を説明する。
【0024】
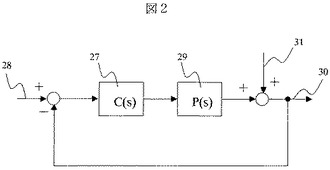
まず、図2を用いて本発明の外乱抑圧手法の基本概念を説明する。図2は一般的なフィードバック制御系のブロック線図であり、目標値28に対し制御対象29(伝達特性をP(s)とする)の出力30が一致するようにフィードバック補償器27(伝達特性をC(s)とする)を設計して動作させる構成である。このフィードバック制御系に外乱31が作用した場合を考える。図2において、外乱31から出力30までの特性は式(数1)となる。
【0025】
【数1】

即ち、フィードバック制御系の一巡伝達関数C(s)P(s)のゲインを0[dB]以上にすることで、外乱31の影響を抑えることができる。外乱31が上述の特定周波数外乱26(周波数をωd[rad/s]とする)である場合には、フィードバック制御系の一巡伝達関数C(s)P(s)において、周波数ωdでゲインが0[dB]以上になるようにフィードバック補償器27を構成するか、新たに補償器を付加すれば良い。更に言えば、周波数ωdでゲインが無限大に近づくほど、大きな外乱抑圧効果が得られるので、式(数2)で示される外乱補償フィルタ20を一巡伝達関数C(s)P(s)に直列に付加することが好ましい。
【0026】
【数2】
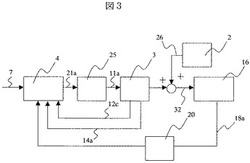
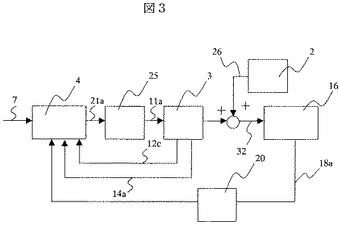
上記基本概念を基に設計した外乱補償フィルタ20(反力補償手段)を付加した振動試験装置1のブロック線図を図3に示す。なお、図1と同一の機能を有するものに対しては同一の番号を付記し、計測装置5、波形発生装置6は省略している。供試体2が発生する特定周波数外乱26は油圧加振機3とテーブル16の間に作用するものと考えられる。この振動試験装置のフィードバック制御系に対して、特定周波数外乱26が加わった後のテーブルを動作させる推力32で切断した一巡伝達関数を考えた場合、外乱補償フィルタ20を加速度信号18aに対して付加することが好ましい。
【0027】
そして、特定周波数外乱26と同一の周波数において、ゲインが無限大に近づくように外乱補償フィルタ20を設計することで、特定周波数に対して大きな外乱抑圧性能が得られる。その一例を図4、図5に示す。このときの特定周波数外乱26は10Hzと仮定している。図4は外乱補償フィルタ20の周波数特性であり、10Hzでゲインが無限大に近づくように鋭いピーク(凸形状)を有している。
【0028】
図5は図4の外乱補償フィルタ20を付加した振動試験装置1の外乱抑圧特性である。点線は外乱補償フィルタ20を付加していない振動試験装置1の外乱抑圧特性を示している。外乱補償フィルタ20を付加することで、所望の周波数(ここでは10Hz)の外乱抑圧特性を大幅に向上させることが可能である。ただし、図5の外乱抑圧特性を見ると、抑圧したい周波数より低い周波数(9.5Hz)で外乱抑圧性能が劣化する場合もある。この問題を解決するための例を以下に説明する。
【0029】
特定周波数外乱26の周波数ωdが2×π×7[rad/s]以下の時、外乱補償フィルタ20の伝達関数を式(数3)とする。
【0030】
【数3】
また、特定周波数外乱26の周波数ωdが2×π×7[rad/s]以上の時、外乱補償フィルタ20の伝達関数を式(数4)とする。
【0031】
【数4】
上述した外乱補償フィルタ20を適用した時の外乱抑圧特性を図6に示す。この時の特定周波数外乱26の周波数は10Hzである。周波数が10Hzであるので、外乱補償フィルタ20は数4の伝達関数であり、図6から、図5と比べて抑圧したい周波数より低い周波数(9.5Hz)での外乱抑圧特性が向上していることが確認できる。上記、式(数3)及び式(数4)の場合分けは具体例の一つであり、所望の外乱抑圧特性が得られるように、外乱補償フィルタ20の係数ωddとωdnの差が0から2×π×10の間で調整すれば良い。
【0032】
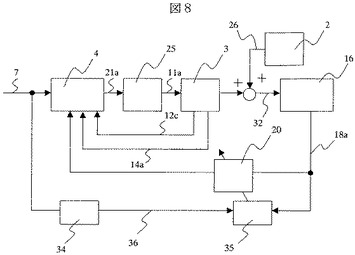
次に、図7、図8を用いて特定周波数外乱26が変動した時の例を以下に説明する。供試体2で発生する特定周波数外乱26は振動試験中に変動することが大いに考えられる。前述のとおり、供試体2が発生する特定周波数外乱26がモータ(回転体)などの回転に同期した周波数であれば、図7に示すとおりその駆動している周波数信号33を用いて外乱補償フィルタ20の伝達関数の係数を逐次変更すれば良い。つまり、外乱補償フィルタ20の伝達関数が式(数2)であればωdであり、式(数3)、式(数4)であればωdによって求められるωdn、ωddである。前記回転体の駆動周波数を検出し、その検出信号を基に前記フィルタの角周波数を決定し、前記駆動周波数が変動した場合、その変動に合わせて前記フィルタの角周波数を更新させる。
【0033】
また、上記供試体2が発生する特定周波数外乱26の周波数信号33が検出できない場合について図8を用いて説明する。振動試験装置モデル34に目標波形信号7を入力し、テーブル16の加速度信号予測値(理想信号)36を演算する。この加速度信号予測値36と実際のテーブル16の加速度信号18aを同定手段35に入力する。同定手段35は、加速度信号予測値36と実際のテーブル16の加速度信号18aを基にして特定周波数外乱26の周波数ωdを同定するものであり、その機能は例えば次のようにして実現される。同定手段35は次式で与えられる。
【0034】
【数5】
iはサンプリング回数であり、kはある定数もしくは時変ゲインである。式(数5)はあるサンプル時点における同定した周波数ωdに、加速度信号予測値と加速度信号の誤差にある定数もしくは時変ゲインを乗じたものを加算することで、順次周波数ωdを更新して真値を求めるものである。式(数5)で求められる周波数ωdを外乱補償フィルタ20の伝達関数の係数を逐次更新すれば良い。前記加速度信号予測値(理想信号)36は、前記振動試験装置の数値モデルにより計算された信号、若しくは、前記供試体が回転しないときに加振した、前記供試体または前記テーブルでの実信号とすることもできる。
【0035】
上記のような外乱の周波数を推定する手段を用いれば、特定周波数外乱26の周波数信号33が検出できない場合においても、その値を推定することで周波数の変動に対しても良好な外乱抑圧特性を得ることができる。以上、振動試験装置1に供試体2が発生する特定周波数外乱26が作用する場合における、特定周波数外乱26の抑圧手段について述べた。以下、この手段と併用して、振動試験装置1の目標波形信号7の再現性を向上させる手段について述べる。
【0036】
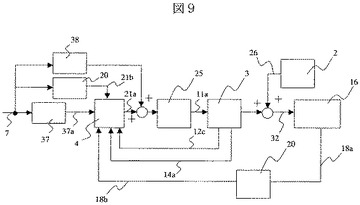
図9は、図3、若しくは図7、若しくは図8の外乱補償フィルタ20を付加した振動試験装置1に、目標波形信号7の再現性を向上させる第一、第二のフィードフォワード補償器37、38を付加したブロック線図である。
【0037】
制御対象であるサーボアンプ25(サーボ弁)、油圧加振機3とテーブル16(供試体2の質量を含む)を含めた伝達関数を次式(数6)で表現する。
【0038】
【数6】
N(s)は分子多項式、D(s)は分母多項式である。
【0039】
第一のフィードフォワード補償器37(式(数7))、第二のフィードフォワード補償器38(式(数8))の伝達関数はそれぞれ次式で表現する。
【0040】
【数7】
【0041】
【数8】
数7の分子は数6の分子であり、数8の分子は数6の分母である。また、数7と数8の分母であるF(s)は、D(s)(数6の分母)またはN(s)(数6の分子)の最大次数以上の次数を有するローパスフィルタであり、目標値応答を決定するものである。例えば、50Hzまでの目標値追従特性を満足したい場合には、1/F(s)の特性が50Hzまでの通過帯域(ゲインが0dB)を持つように1/F(s)の遮断周波数を設定すればよい。
【0042】
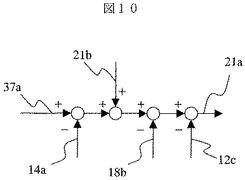
ここで、外乱補償フィルタ20を付加することによって振動試験装置1の目標値追従特性(目標波形信号7からテーブル16の応答)が、その特定周波数26で大幅に劣化する場合がある。その場合、同じ伝達関数の外乱補償フィルタ20をフィードフォワード補償器として付加し、目標波形信号7を入力として、その出力である外乱補償フィードフォワード信号21bを制御装置4に入力すれば良い。この外乱補償フィードフォワード信号21bは、図10に示すとおり、制御装置4内で外乱補償フィルタ20を通ったフィードバック加速度信号18bを減算する前段の信号に対し加算する。
【0043】
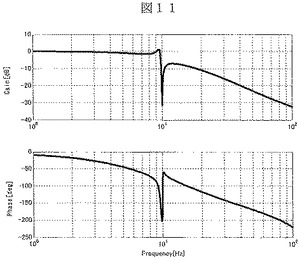
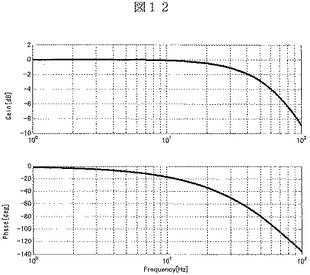
上記手段を適用した振動試験装置1の目標値追従特性を図11、図12に示す。図11は外乱補償フィルタ20のみを付加した振動試験装置1の目標値追従特性(図6の外乱抑圧特性を有する振動試験装置1と同一パラメータ)を示している。この場合、外乱補償フィルタ20に相当する周波数ωdで目標値追従特性が大幅に劣化している。これに対し、図12は上述のフィードフォワード補償器37、38を付加したものであり図11に比べ、周波数ωdで目標値追従特性が改善できていることがわかる。即ち、特定周波数外乱26の影響を抑制しつつ目標波形信号7の再現性を向上させることが可能となる。
【0044】
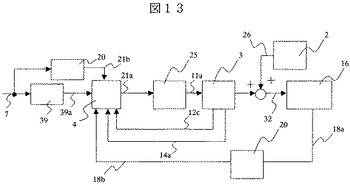
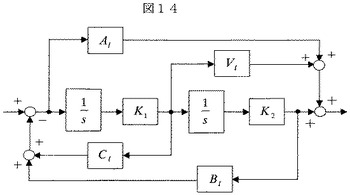
上記フィードフォワード補償器は、制御対象であるサーボアンプ25、油圧加振機3とテーブル16(供試体2の質量を含む)を含めた伝達関数が必要となるが、目標値追従特性を改善する別の方式としては、図13に示す第三のフィードフォワード補償器39を付加する形態としても良い。第三のフィードフォワード補償器39のブロック線図を図14に示す。第三のフィードフォワード補償器39は、目標波形信号7を二階積分するとともに、加速度積分ゲインAIと速度積分ゲインVIにより目標値追従特性をフィードバック補償器とは独立に整形できる。前記第三のフィードフォワード補償器39は、前記目標波形信号の一回積分値および二回積分値に相当する信号を算出し、加速度、速度、および変位に相当する3種の信号情報を制御系の特性が一次遅れ要素と等価になるような比率で出力することで、新たな目標波形信号を生成する。第三のフィードフォワード補償器39の伝達関数は次式で表現する。
【0045】
【数9】
この第三のフィードフォワード補償器39を用いれば、制御対象の伝達関数を求める必要はない。また、外乱補償フィルタ20を付加することによって劣化する特性に関しては、図9と同様に、目標信号7に外乱補償フィルタ20を通した外乱補償フィードフォワード信号21bを制御装置4に入力すれば良い。
【0046】
以上、振動試験装置1において供試体2から特定周波数外乱26を受ける場合の、外乱抑圧手段、および地震波再現性向上の手段について述べた。そこでは、供試体2がモータなどの動的な要素を含む場合を想定したが、本発明はそのような供試体2に限定されるものではなく、例えば構造物自体の有する固有振動数が励起され、大きな反力を振動試験装置1が受け続けるような振動試験を行う際にも利用できる。
【0047】
また、上記実施例では供試体2をテーブル16上に搭載し、加振実験を行う構成としているが、供試体2を継手8若しくは油圧加振機3の軸3bに直接連結して加振実験を行う構成としても良いことは言うまでもない。この時、加速度センサ17は継手8若しくは軸3b若しくは供試体2に直接取り付けることになる。加速度センサが取り付け困難な場合には、変位計15の出力信号14aを二階微分した信号を用いても良い。
【産業上の利用可能性】
【0048】
本発明は、振動試験装置の分野に利用可能である。
【図面の簡単な説明】
【0049】
【図1】本発明における振動試験装置の基本システム図。
【図2】本発明における外乱抑圧手法の基本概念を示すブロック線図。
【図3】本発明における外乱補償フィルタを付加した振動試験装置のブロック線図。
【図4】本発明における外乱補償フィルタの一例を示す周波数特性図。
【図5】本発明における外乱補償フィルタを付加した一例を示す振動試験装置の外乱抑圧特性図。
【図6】本発明における別の外乱補償フィルタを付加した一例を示す振動試験装置の外乱抑圧特性図。
【図7】本発明における周波数変動型の外乱補償フィルタを付加した振動試験装置のブロック線図。
【図8】本発明における適応型の外乱補償フィルタを付加した振動試験装置のブロック線図。
【図9】本発明におけるフィードフォワード補償器を付加した振動試験装置のブロック線図。
【図10】本発明における制御装置内の信号処理手順を示す図。
【図11】本発明における外乱補償フィルタのみを付加した振動試験装置の目標値追従特性図。
【図12】本発明における外乱補償フィルタとフィードフォワード補償器を付加した振動試験装置の目標値追従特性図。
【図13】本発明における外乱補償フィルタと第三のフィードフォワード補償器を付加した振動試験装置の目標値追従特性図。
【図14】本発明における第三のフィードフォワード補償器のブロック線図。
【符号の説明】
【0050】
1…振動試験装置、2…供試体、3…油圧加振機、4…制御装置、5…計測装置、6…波形発生装置、7…目標波形信号、8…継手、9…変位センサ、10…圧力センサ、11…サーボ弁、12…圧力信号、13…圧力検出器、14…変位信号、15…変位計、16…テーブル、17…加速度センサ、18…加速度信号、19…加速度計、20…外乱補償フィルタ、21…減算器、22…積分器、23…速度信号、24…フィードバックゲイン、25…サーボアンプ、26…特定周波数外乱、27…フィードバック補償器、28…目標値、29…制御対象、30…出力、31…外乱、32…推力、33…周波数信号、34…振動試験装置モデル、35…同定手段、36…加速度信号予測値、37…第一のフィードフォワード補償器、38…第二のフィードフォワード補償器、39…第三のフィードフォワード補償器。
【技術分野】
【0001】
本発明は、物体を加振して試験する振動試験装置に関する。
【背景技術】
【0002】
構造物の耐震性能を評価する手法として、振動台を用いた加振実験が広く行われている。加振実験は、振動台上に試験対象物(以下、供試体)を搭載し、油圧アクチュエータを用いて実際の地震波などの加速度波を模擬するように振動台を動作させ、耐震性能を評価するものである。そのため、振動台、油圧アクチュエータなどを含めた振動試験装置には、地震波などの入力信号の正確な再現性が求められ、それを実現するための各種制御手法が提案されている。
【0003】
上記振動試験装置において、地震波の再現性を劣化させる要因として供試体の反力が振動試験装置への外乱として作用することが挙げられる。
【0004】
供試体の反力補償方式としては、特許文献1に開示がある。この公報では、供試体反力を計測し、この反力を相殺する補償信号を生成して制御する例が記載されている。また、その他の方式として、特許文献2に開示がある。この公報では、振動台のフィードバック制御装置内に精度の良い外乱推定補償装置を付加する例が記載されている。
【0005】
【特許文献1】WO97/11344号公報
【特許文献2】特開2006−90761号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記、WO97/11344号公報では、一般の振動台には具備されていない反力を計測するための新たなセンサを付加する必要がある。
【0007】
また、上記特開2006−90761号公報では、観測可能な状態量を用いて外乱推定精度を高める外乱推定補償装置を付加することで、外乱抑圧性能の向上を図っているが、外乱推定補償装置にはセンサノイズの低減や微分動作を回避するためのローパスフィルタを付加する必要があるため、精度良く外乱を補償できる周波数帯域は低周波部分のみに限定される。また、一般に外乱推定補償装置の外乱抑圧性能は−30dB程度であり、その目的はある周波数範囲(例えば1〜10Hz程度)内の外乱抑圧性能の向上に着目したものである。そのため、ある特定の周波数成分のみを持つ大きな反力が振動台に加わった場合には、十分な外乱抑圧性能を確保できない虞がある。
【0008】
上記何れの反力補償方式も、試験対象物の崩壊過程や土槽などのように供試体の反力が時々刻々と変化する場合を想定しており、ある特定の大きな周波数成分を持つ反力が振動台に作用する場合については十分考慮されていない。ここで、ある特定の周波数成分を持つ反力を発生する供試体としては、例えばモータやタービンなどの回転体を含む構造物がある。これらは主に駆動周波数に起因した振動により供試体自体が常に発生している反力として振動台に作用し、地震波の再現性を劣化させる。
【0009】
上記問題点を鑑み、本発明は、ある特定の周波数成分を持つ反力を発生する供試体の振動試験を行う際に、反力を推定するためのセンサを新たに付加する必要が無く、かつある特定の周波数成分の外乱抑圧性能を向上させる補償装置を付加するのみで、特定周波数の反力を補償し地震波の再現性を向上させることができる振動試験装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、供試体を搭載するテーブルと、前記供試体または前記テーブルを加振する油圧加振機と、前記油圧加振機または前記テーブルまたは前記供試体の動作状態を計測する計測装置と、前記供試体または前記テーブルで再現すべき目標波形信号を生成する波形発生装置と、前記油圧加振機の動作を制御するための制御装置を備えた振動試験装置において、前記油圧加振機は、作動油を供給するための油圧源と、電気信号により前記作動油のシリンダへの供給量を調整するサーボ弁と、継手を介して前記供試体または前記テーブルへ動力を伝達する軸と、前記作動油の圧力を受けるピストンとを具備し、前記計測装置は、前記軸の変位と、前記供試体または前記テーブルの加速度と、前記ピストンで仕切られた前記シリンダ内の作動油の圧力差とを検出するセンサおよび計測器を具備し、前記制御装置は、前記変位と前記加速度と前記差圧の検出信号と、前記目標波形から前記サーボ弁への電気信号を生成するものであって、前記制御装置内に前記供試体から受ける反力を抑制する反力補償手段を有することを特徴とする振動試験装置。
【0011】
前記反力補償手段は前記加速度の検出信号を入力とするフィルタであって、前記フィルタのゲイン特性は凸形状を示し、前記供試体から受ける反力の周波数にゲインが最大値となる周波数特性を有し、前記フィルタの分子、分母の角周波数の差が2×π×0[rad/s]から2×π×10[rad/s]の間とする。
【0012】
また、前記供試体が回転体を有する場合、前記回転体の駆動周波数を検出し、その検出信号を基に前記フィルタの角周波数を決定し、前記駆動周波数が変動した場合、その変動に合わせて前記フィルタの角周波数を更新させる。
【0013】
また、前記回転体の駆動周波数を、前記供試体または前記テーブルでの前記目標波形信号の理想信号と前記供試体または前記テーブルでの前記目標波形信号の実信号との誤差を基に推定し、前記推定値を前記フィルタの角周波数とする。
【0014】
前記理想信号は、前記振動試験装置の数値モデルにより計算された信号、若しくは、前記供試体が回転しないときに加振した、前記供試体または前記テーブルでの実信号とする。
【0015】
前記目標波形信号を入力とした、第一のフィードフォワード補償器と第二のフィードフォワード補償器と前記反力補償手段と同一のフィルタの出力信号を前記制御装置に加算する。
【0016】
また、前記第一のフィードフォワード補償器と前記第二のフィードフォワード補償器は、それぞれの補償器の分子は、制御対象である前記サーボ弁と前記油圧加振機と前記テーブルと前記供試体の伝達関数の分子、分母であり、それぞれの補償器の分母は、前記制御対象における分子と分母の相対次数以上の次数となるローパスフィルタとする。
【発明の効果】
【0017】
本発明によれば、振動試験装置において特定の周波数成分の外乱抑圧特性を向上させることが可能となる。そのため、ある特定の周波数成分を有する大きな反力を発生する供試体に対しても、地震波を忠実に振動台で再現することができるため、正確な振動試験を行うことができる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の一実施例について図面を用いて説明する。
【実施例1】
【0019】
図1は従来から用いられている振動試験装置1の1軸方向のみを表した基本システム図である。振動試験装置1は、供試体2を搭載するテーブル16と、テーブル16を介して供試体2を加振する油圧加振機3と、この油圧加振機3を制御する制御装置4と、油圧加振機3ならびにテーブル16の動作状態を計測する計測装置5を有する。制御装置4には、波形発生装置6が生成した地震加速度波形などの目標波形信号7が入力される。油圧加振機3のほぼ中央部には、受圧用のピストン3aを取り付けた軸3bがシリンダ3cを貫通しており、一方の貫通側は継手8に取り付けられている。軸3bの他端側には、油圧加振機3の変位を検出する変位センサ9が取り付けられている。
【0020】
シリンダ3c内には作動油が充満されており、ピストン3aにより仕切られたシリンダ3c内の2つの空間3d、3eのそれぞれに対応して、作動油の圧力を検出する圧力センサ10a、10bが設けられている。シリンダ3cの側部には、サーボ弁11が取り付けられており、2つの空間3d、3eへの供給油圧を制御する。各圧力センサ10a、10bが検出した圧力信号12a、12bは、計測装置5が有する圧力検出器13に入力される。同様に変位センサ9が検出した変位信号14は、計測装置5が有する変位計15に、テーブル16に取り付けられた加速度センサ17が検出した加速度信号18は加速度計19に入力される。圧力検出器13では、シリンダ3cの2つの空間3d、3eの圧力差を求める。
【0021】
上記構成の振動試験装置1の動作を以下に説明する。波形発生装置6が、制御装置4にテーブル16で再現する目標波形信号7を入力する。制御装置4に入力された目標波形信号7は減算器21に送られる。計測装置5の変位計15の出力信号14a、圧力検出器13の出力信号12c、加速度計19の出力信号18a、加速度計19の出力信号18aを積分器22に入力して得られた速度信号23は、それぞれ変位フィードバックゲイン24a、差圧フィードバックゲイン24b、加速度フィードバックゲイン24c、速度フィードバックゲイン24dを乗じた後、減算器21に送られ、目標波形信号7に対して減算される。上記制御装置4での各演算処理は、例えばディジタルシグナルプロセッサーなどの高速演算処理装置により実現される。
【0022】
減算器21の出力信号21aは、サーボアンプ25に入力される。サーボアンプ25で出力信号21aが増幅されて、サーボ弁11への指令信号11aが生成される。サーボ弁11に指令信号11aが入力されると、図示しない油圧源から作動油が供給され、それに伴い油圧加振機3の軸3bが紙面左右方向に駆動され、軸3bに取り付けた継手8、テーブル16を介して供試体2を加振する。このとき、供試体2が加振されることでテーブル16に反力が加わる。この反力は、テーブル16若しくは振動試験装置1への外乱となる。この外乱は、前述した各フィードバック信号を用いたフィードバック制御系の有する外乱抑圧性能により、その影響を十分に抑圧する。若しくは、従来から提案されている外乱推定補償装置などを用いることで影響を抑えることができる。なお、図1に示す振動試験装置1には、図示はしていないが加速度計19の出力信号18a、圧力検出器13の出力信号12cのそれぞれには直流成分および観測ノイズを除去するためのフィルタが具備されている。
【0023】
ここで、供試体2が、例えばモータやタービンなどの動的な要素を含む場合、加振の有無に係わらず、駆動周波数などに起因したある特定の周波数の反力がテーブル16に加わる。この反力は、先の説明の通り、テーブル16若しくは振動試験装置1への特定周波数外乱26となる。以下に、この特定周波数外乱26を抑圧するための方法を説明する。
【0024】
まず、図2を用いて本発明の外乱抑圧手法の基本概念を説明する。図2は一般的なフィードバック制御系のブロック線図であり、目標値28に対し制御対象29(伝達特性をP(s)とする)の出力30が一致するようにフィードバック補償器27(伝達特性をC(s)とする)を設計して動作させる構成である。このフィードバック制御系に外乱31が作用した場合を考える。図2において、外乱31から出力30までの特性は式(数1)となる。
【0025】
【数1】
即ち、フィードバック制御系の一巡伝達関数C(s)P(s)のゲインを0[dB]以上にすることで、外乱31の影響を抑えることができる。外乱31が上述の特定周波数外乱26(周波数をωd[rad/s]とする)である場合には、フィードバック制御系の一巡伝達関数C(s)P(s)において、周波数ωdでゲインが0[dB]以上になるようにフィードバック補償器27を構成するか、新たに補償器を付加すれば良い。更に言えば、周波数ωdでゲインが無限大に近づくほど、大きな外乱抑圧効果が得られるので、式(数2)で示される外乱補償フィルタ20を一巡伝達関数C(s)P(s)に直列に付加することが好ましい。
【0026】
【数2】
上記基本概念を基に設計した外乱補償フィルタ20(反力補償手段)を付加した振動試験装置1のブロック線図を図3に示す。なお、図1と同一の機能を有するものに対しては同一の番号を付記し、計測装置5、波形発生装置6は省略している。供試体2が発生する特定周波数外乱26は油圧加振機3とテーブル16の間に作用するものと考えられる。この振動試験装置のフィードバック制御系に対して、特定周波数外乱26が加わった後のテーブルを動作させる推力32で切断した一巡伝達関数を考えた場合、外乱補償フィルタ20を加速度信号18aに対して付加することが好ましい。
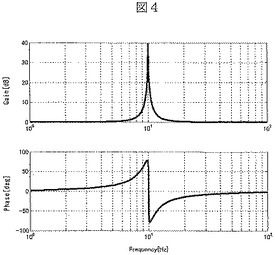
【0027】
そして、特定周波数外乱26と同一の周波数において、ゲインが無限大に近づくように外乱補償フィルタ20を設計することで、特定周波数に対して大きな外乱抑圧性能が得られる。その一例を図4、図5に示す。このときの特定周波数外乱26は10Hzと仮定している。図4は外乱補償フィルタ20の周波数特性であり、10Hzでゲインが無限大に近づくように鋭いピーク(凸形状)を有している。
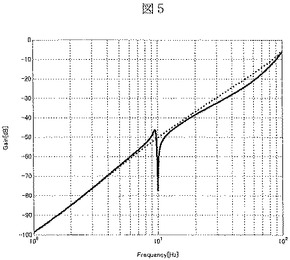
【0028】
図5は図4の外乱補償フィルタ20を付加した振動試験装置1の外乱抑圧特性である。点線は外乱補償フィルタ20を付加していない振動試験装置1の外乱抑圧特性を示している。外乱補償フィルタ20を付加することで、所望の周波数(ここでは10Hz)の外乱抑圧特性を大幅に向上させることが可能である。ただし、図5の外乱抑圧特性を見ると、抑圧したい周波数より低い周波数(9.5Hz)で外乱抑圧性能が劣化する場合もある。この問題を解決するための例を以下に説明する。
【0029】
特定周波数外乱26の周波数ωdが2×π×7[rad/s]以下の時、外乱補償フィルタ20の伝達関数を式(数3)とする。
【0030】
【数3】
また、特定周波数外乱26の周波数ωdが2×π×7[rad/s]以上の時、外乱補償フィルタ20の伝達関数を式(数4)とする。
【0031】
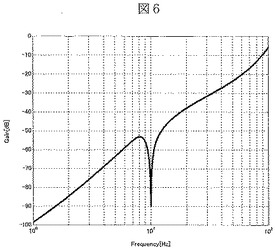
【数4】
上述した外乱補償フィルタ20を適用した時の外乱抑圧特性を図6に示す。この時の特定周波数外乱26の周波数は10Hzである。周波数が10Hzであるので、外乱補償フィルタ20は数4の伝達関数であり、図6から、図5と比べて抑圧したい周波数より低い周波数(9.5Hz)での外乱抑圧特性が向上していることが確認できる。上記、式(数3)及び式(数4)の場合分けは具体例の一つであり、所望の外乱抑圧特性が得られるように、外乱補償フィルタ20の係数ωddとωdnの差が0から2×π×10の間で調整すれば良い。
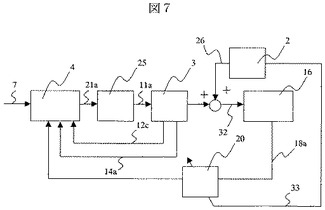
【0032】
次に、図7、図8を用いて特定周波数外乱26が変動した時の例を以下に説明する。供試体2で発生する特定周波数外乱26は振動試験中に変動することが大いに考えられる。前述のとおり、供試体2が発生する特定周波数外乱26がモータ(回転体)などの回転に同期した周波数であれば、図7に示すとおりその駆動している周波数信号33を用いて外乱補償フィルタ20の伝達関数の係数を逐次変更すれば良い。つまり、外乱補償フィルタ20の伝達関数が式(数2)であればωdであり、式(数3)、式(数4)であればωdによって求められるωdn、ωddである。前記回転体の駆動周波数を検出し、その検出信号を基に前記フィルタの角周波数を決定し、前記駆動周波数が変動した場合、その変動に合わせて前記フィルタの角周波数を更新させる。
【0033】
また、上記供試体2が発生する特定周波数外乱26の周波数信号33が検出できない場合について図8を用いて説明する。振動試験装置モデル34に目標波形信号7を入力し、テーブル16の加速度信号予測値(理想信号)36を演算する。この加速度信号予測値36と実際のテーブル16の加速度信号18aを同定手段35に入力する。同定手段35は、加速度信号予測値36と実際のテーブル16の加速度信号18aを基にして特定周波数外乱26の周波数ωdを同定するものであり、その機能は例えば次のようにして実現される。同定手段35は次式で与えられる。
【0034】
【数5】
iはサンプリング回数であり、kはある定数もしくは時変ゲインである。式(数5)はあるサンプル時点における同定した周波数ωdに、加速度信号予測値と加速度信号の誤差にある定数もしくは時変ゲインを乗じたものを加算することで、順次周波数ωdを更新して真値を求めるものである。式(数5)で求められる周波数ωdを外乱補償フィルタ20の伝達関数の係数を逐次更新すれば良い。前記加速度信号予測値(理想信号)36は、前記振動試験装置の数値モデルにより計算された信号、若しくは、前記供試体が回転しないときに加振した、前記供試体または前記テーブルでの実信号とすることもできる。
【0035】
上記のような外乱の周波数を推定する手段を用いれば、特定周波数外乱26の周波数信号33が検出できない場合においても、その値を推定することで周波数の変動に対しても良好な外乱抑圧特性を得ることができる。以上、振動試験装置1に供試体2が発生する特定周波数外乱26が作用する場合における、特定周波数外乱26の抑圧手段について述べた。以下、この手段と併用して、振動試験装置1の目標波形信号7の再現性を向上させる手段について述べる。
【0036】
図9は、図3、若しくは図7、若しくは図8の外乱補償フィルタ20を付加した振動試験装置1に、目標波形信号7の再現性を向上させる第一、第二のフィードフォワード補償器37、38を付加したブロック線図である。
【0037】
制御対象であるサーボアンプ25(サーボ弁)、油圧加振機3とテーブル16(供試体2の質量を含む)を含めた伝達関数を次式(数6)で表現する。
【0038】
【数6】
N(s)は分子多項式、D(s)は分母多項式である。
【0039】
第一のフィードフォワード補償器37(式(数7))、第二のフィードフォワード補償器38(式(数8))の伝達関数はそれぞれ次式で表現する。
【0040】
【数7】
【0041】
【数8】
数7の分子は数6の分子であり、数8の分子は数6の分母である。また、数7と数8の分母であるF(s)は、D(s)(数6の分母)またはN(s)(数6の分子)の最大次数以上の次数を有するローパスフィルタであり、目標値応答を決定するものである。例えば、50Hzまでの目標値追従特性を満足したい場合には、1/F(s)の特性が50Hzまでの通過帯域(ゲインが0dB)を持つように1/F(s)の遮断周波数を設定すればよい。
【0042】
ここで、外乱補償フィルタ20を付加することによって振動試験装置1の目標値追従特性(目標波形信号7からテーブル16の応答)が、その特定周波数26で大幅に劣化する場合がある。その場合、同じ伝達関数の外乱補償フィルタ20をフィードフォワード補償器として付加し、目標波形信号7を入力として、その出力である外乱補償フィードフォワード信号21bを制御装置4に入力すれば良い。この外乱補償フィードフォワード信号21bは、図10に示すとおり、制御装置4内で外乱補償フィルタ20を通ったフィードバック加速度信号18bを減算する前段の信号に対し加算する。
【0043】
上記手段を適用した振動試験装置1の目標値追従特性を図11、図12に示す。図11は外乱補償フィルタ20のみを付加した振動試験装置1の目標値追従特性(図6の外乱抑圧特性を有する振動試験装置1と同一パラメータ)を示している。この場合、外乱補償フィルタ20に相当する周波数ωdで目標値追従特性が大幅に劣化している。これに対し、図12は上述のフィードフォワード補償器37、38を付加したものであり図11に比べ、周波数ωdで目標値追従特性が改善できていることがわかる。即ち、特定周波数外乱26の影響を抑制しつつ目標波形信号7の再現性を向上させることが可能となる。
【0044】
上記フィードフォワード補償器は、制御対象であるサーボアンプ25、油圧加振機3とテーブル16(供試体2の質量を含む)を含めた伝達関数が必要となるが、目標値追従特性を改善する別の方式としては、図13に示す第三のフィードフォワード補償器39を付加する形態としても良い。第三のフィードフォワード補償器39のブロック線図を図14に示す。第三のフィードフォワード補償器39は、目標波形信号7を二階積分するとともに、加速度積分ゲインAIと速度積分ゲインVIにより目標値追従特性をフィードバック補償器とは独立に整形できる。前記第三のフィードフォワード補償器39は、前記目標波形信号の一回積分値および二回積分値に相当する信号を算出し、加速度、速度、および変位に相当する3種の信号情報を制御系の特性が一次遅れ要素と等価になるような比率で出力することで、新たな目標波形信号を生成する。第三のフィードフォワード補償器39の伝達関数は次式で表現する。
【0045】
【数9】
この第三のフィードフォワード補償器39を用いれば、制御対象の伝達関数を求める必要はない。また、外乱補償フィルタ20を付加することによって劣化する特性に関しては、図9と同様に、目標信号7に外乱補償フィルタ20を通した外乱補償フィードフォワード信号21bを制御装置4に入力すれば良い。
【0046】
以上、振動試験装置1において供試体2から特定周波数外乱26を受ける場合の、外乱抑圧手段、および地震波再現性向上の手段について述べた。そこでは、供試体2がモータなどの動的な要素を含む場合を想定したが、本発明はそのような供試体2に限定されるものではなく、例えば構造物自体の有する固有振動数が励起され、大きな反力を振動試験装置1が受け続けるような振動試験を行う際にも利用できる。
【0047】
また、上記実施例では供試体2をテーブル16上に搭載し、加振実験を行う構成としているが、供試体2を継手8若しくは油圧加振機3の軸3bに直接連結して加振実験を行う構成としても良いことは言うまでもない。この時、加速度センサ17は継手8若しくは軸3b若しくは供試体2に直接取り付けることになる。加速度センサが取り付け困難な場合には、変位計15の出力信号14aを二階微分した信号を用いても良い。
【産業上の利用可能性】
【0048】
本発明は、振動試験装置の分野に利用可能である。
【図面の簡単な説明】
【0049】
【図1】本発明における振動試験装置の基本システム図。
【図2】本発明における外乱抑圧手法の基本概念を示すブロック線図。
【図3】本発明における外乱補償フィルタを付加した振動試験装置のブロック線図。
【図4】本発明における外乱補償フィルタの一例を示す周波数特性図。
【図5】本発明における外乱補償フィルタを付加した一例を示す振動試験装置の外乱抑圧特性図。
【図6】本発明における別の外乱補償フィルタを付加した一例を示す振動試験装置の外乱抑圧特性図。
【図7】本発明における周波数変動型の外乱補償フィルタを付加した振動試験装置のブロック線図。
【図8】本発明における適応型の外乱補償フィルタを付加した振動試験装置のブロック線図。
【図9】本発明におけるフィードフォワード補償器を付加した振動試験装置のブロック線図。
【図10】本発明における制御装置内の信号処理手順を示す図。
【図11】本発明における外乱補償フィルタのみを付加した振動試験装置の目標値追従特性図。
【図12】本発明における外乱補償フィルタとフィードフォワード補償器を付加した振動試験装置の目標値追従特性図。
【図13】本発明における外乱補償フィルタと第三のフィードフォワード補償器を付加した振動試験装置の目標値追従特性図。
【図14】本発明における第三のフィードフォワード補償器のブロック線図。
【符号の説明】
【0050】
1…振動試験装置、2…供試体、3…油圧加振機、4…制御装置、5…計測装置、6…波形発生装置、7…目標波形信号、8…継手、9…変位センサ、10…圧力センサ、11…サーボ弁、12…圧力信号、13…圧力検出器、14…変位信号、15…変位計、16…テーブル、17…加速度センサ、18…加速度信号、19…加速度計、20…外乱補償フィルタ、21…減算器、22…積分器、23…速度信号、24…フィードバックゲイン、25…サーボアンプ、26…特定周波数外乱、27…フィードバック補償器、28…目標値、29…制御対象、30…出力、31…外乱、32…推力、33…周波数信号、34…振動試験装置モデル、35…同定手段、36…加速度信号予測値、37…第一のフィードフォワード補償器、38…第二のフィードフォワード補償器、39…第三のフィードフォワード補償器。
【特許請求の範囲】
【請求項1】
供試体を搭載するテーブルと、前記供試体または前記テーブルを加振する油圧加振機と、前記油圧加振機または前記テーブルまたは前記供試体の動作状態を計測する計測装置と、前記供試体または前記テーブルで再現すべき目標波形信号を生成する波形発生装置と、前記油圧加振機の動作を制御するための制御装置を備えた振動試験装置において、
前記油圧加振機は、作動油を供給するための油圧源と、電気信号により前記作動油のシリンダへの供給量を調整するサーボ弁と、継手を介して前記供試体または前記テーブルへ動力を伝達する軸と、前記作動油の圧力を受けるピストンとを具備し、前記計測装置は、前記軸の変位と、前記供試体または前記テーブルの加速度と、前記ピストンで仕切られた前記シリンダ内の作動油の圧力差とを検出するセンサおよび計測器を具備し、前記制御装置は、前記変位と前記加速度と前記差圧の検出信号と、前記目標波形から前記サーボ弁への電気信号を生成するものであって、前記制御装置内に前記供試体から受ける反力を抑制する反力補償手段を有することを特徴とする振動試験装置。
【請求項2】
請求項1に記載の振動試験装置において、前記反力補償手段は前記テーブル、前記供試体、前記ピストン、何れかの加速度の検出信号を入力とするフィルタであって、前記フィルタのゲイン特性は凸形状を示し、前記供試体から受ける反力の周波数にゲインが最大値となる周波数特性を有することを特徴とする振動試験装置。
【請求項3】
請求項1または請求項2に記載の振動試験装置において、前記フィルタの分子、分母の角周波数の差が2×π×0[rad/s]から2×π×10[rad/s]の間となることを特徴とする振動試験装置。
【請求項4】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記供試体が回転体を有する場合、前記回転体の駆動周波数を検出し、その検出信号を基に前記フィルタの角周波数を決定し、前記駆動周波数が変動した場合、その変動に合わせて前記フィルタの角周波数を更新させることを特徴とする振動試験装置。
【請求項5】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記回転体の駆動周波数を、前記供試体または前記テーブルでの前記目標波形信号の理想信号と前記供試体または前記テーブルでの前記目標波形信号の実信号との誤差を基に推定し、前記推定値を前記フィルタの角周波数とすることを特徴とする振動試験装置。
【請求項6】
請求項5に記載の振動試験装置において、前記理想信号は、前記振動試験装置の数値モデルにより計算された信号、若しくは、前記供試体が回転しないときに加振した、前記供試体または前記テーブルでの実信号とすることを特徴とする振動試験装置。
【請求項7】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記目標波形信号を入力とした、第一のフィードフォワード補償器と第二のフィードフォワード補償器を備え、前記各補償器の出力と前記反力補償手段と同一のフィルタであって前記目標波形信号を入力としたフィルタの出力信号を前記制御装置に加算することを特徴とする振動試験装置。
【請求項8】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記目標波形信号を入力とした、第三のフィードフォワード補償器を備え、この補償器と前記反力補償手段と同一のフィルタの出力信号を前記制御装置に加算することを特徴とする振動試験装置。
【請求項9】
請求項7に記載の振動試験装置において、前記第一のフィードフォワード補償器と前記第二のフィードフォワード補償器の分子が、制御対象である前記サーボ弁と前記油圧加振機と前記テーブルと前記供試体の伝達関数の分子または分母であり、それぞれの補償器の分母が、前記制御対象の伝達関数の分子または分母の相対次数以上の次数となるローパスフィルタであることを特徴とする振動試験装置。
【請求項10】
請求項8に記載の振動試験装置において、前記第三のフィードフォワード補償器は、
前記目標波形信号の一回積分値および二回積分値に相当する信号を算出し、
加速度、速度、および変位に相当する3種の信号情報を制御系の特性が一次遅れ要素と
等価になるような比率で出力することで、
新たな目標波形信号を生成することを特徴とする振動試験装置。
【請求項1】
供試体を搭載するテーブルと、前記供試体または前記テーブルを加振する油圧加振機と、前記油圧加振機または前記テーブルまたは前記供試体の動作状態を計測する計測装置と、前記供試体または前記テーブルで再現すべき目標波形信号を生成する波形発生装置と、前記油圧加振機の動作を制御するための制御装置を備えた振動試験装置において、
前記油圧加振機は、作動油を供給するための油圧源と、電気信号により前記作動油のシリンダへの供給量を調整するサーボ弁と、継手を介して前記供試体または前記テーブルへ動力を伝達する軸と、前記作動油の圧力を受けるピストンとを具備し、前記計測装置は、前記軸の変位と、前記供試体または前記テーブルの加速度と、前記ピストンで仕切られた前記シリンダ内の作動油の圧力差とを検出するセンサおよび計測器を具備し、前記制御装置は、前記変位と前記加速度と前記差圧の検出信号と、前記目標波形から前記サーボ弁への電気信号を生成するものであって、前記制御装置内に前記供試体から受ける反力を抑制する反力補償手段を有することを特徴とする振動試験装置。
【請求項2】
請求項1に記載の振動試験装置において、前記反力補償手段は前記テーブル、前記供試体、前記ピストン、何れかの加速度の検出信号を入力とするフィルタであって、前記フィルタのゲイン特性は凸形状を示し、前記供試体から受ける反力の周波数にゲインが最大値となる周波数特性を有することを特徴とする振動試験装置。
【請求項3】
請求項1または請求項2に記載の振動試験装置において、前記フィルタの分子、分母の角周波数の差が2×π×0[rad/s]から2×π×10[rad/s]の間となることを特徴とする振動試験装置。
【請求項4】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記供試体が回転体を有する場合、前記回転体の駆動周波数を検出し、その検出信号を基に前記フィルタの角周波数を決定し、前記駆動周波数が変動した場合、その変動に合わせて前記フィルタの角周波数を更新させることを特徴とする振動試験装置。
【請求項5】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記回転体の駆動周波数を、前記供試体または前記テーブルでの前記目標波形信号の理想信号と前記供試体または前記テーブルでの前記目標波形信号の実信号との誤差を基に推定し、前記推定値を前記フィルタの角周波数とすることを特徴とする振動試験装置。
【請求項6】
請求項5に記載の振動試験装置において、前記理想信号は、前記振動試験装置の数値モデルにより計算された信号、若しくは、前記供試体が回転しないときに加振した、前記供試体または前記テーブルでの実信号とすることを特徴とする振動試験装置。
【請求項7】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記目標波形信号を入力とした、第一のフィードフォワード補償器と第二のフィードフォワード補償器を備え、前記各補償器の出力と前記反力補償手段と同一のフィルタであって前記目標波形信号を入力としたフィルタの出力信号を前記制御装置に加算することを特徴とする振動試験装置。
【請求項8】
請求項1または請求項2または請求項3に記載の振動試験装置において、前記目標波形信号を入力とした、第三のフィードフォワード補償器を備え、この補償器と前記反力補償手段と同一のフィルタの出力信号を前記制御装置に加算することを特徴とする振動試験装置。
【請求項9】
請求項7に記載の振動試験装置において、前記第一のフィードフォワード補償器と前記第二のフィードフォワード補償器の分子が、制御対象である前記サーボ弁と前記油圧加振機と前記テーブルと前記供試体の伝達関数の分子または分母であり、それぞれの補償器の分母が、前記制御対象の伝達関数の分子または分母の相対次数以上の次数となるローパスフィルタであることを特徴とする振動試験装置。
【請求項10】
請求項8に記載の振動試験装置において、前記第三のフィードフォワード補償器は、
前記目標波形信号の一回積分値および二回積分値に相当する信号を算出し、
加速度、速度、および変位に相当する3種の信号情報を制御系の特性が一次遅れ要素と
等価になるような比率で出力することで、
新たな目標波形信号を生成することを特徴とする振動試験装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2008−233075(P2008−233075A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2008−37479(P2008−37479)
【出願日】平成20年2月19日(2008.2.19)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成20年2月19日(2008.2.19)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
[ Back to top ]