
振動運動を増幅するマイクロメカニカル素子
【課題】
【解決手段】本発明は、振動運動を増幅するマイクロメカニカル素子(11)に関し、マイクロメカニカル素子(11)は:前記素子を振動部材に堅く固定するインターフェース部(7)と、前記インターフェース部に対して、少なくとも1自由度で移動するように取り付けられるボディ(3)と、戻し付勢力を前記可動ボディと前記インターフェース部との間に加えることができるバネ(4)と;前記インターフェース部が前記自由度で移動する方向を検出する部材と、前記可動ボディを前記インターフェース部に結合させる部材(6)であって、前記可動ボディ(3)を前記インターフェース部(7)に、前記インターフェース部の前記移動方向が、前記可動ボディの移動方向と反対になるときに結合させるように構成され、前記可動ボディを前記インターフェース部から、前記インターフェース部の方向が切り替わる前に、かつ前記インターフェース部の前記移動方向が、前記可動ボディの移動方向と一致するときに結合解除するように構成されている、前記結合させる部材(6)とを含んでいる。
【解決手段】本発明は、振動運動を増幅するマイクロメカニカル素子(11)に関し、マイクロメカニカル素子(11)は:前記素子を振動部材に堅く固定するインターフェース部(7)と、前記インターフェース部に対して、少なくとも1自由度で移動するように取り付けられるボディ(3)と、戻し付勢力を前記可動ボディと前記インターフェース部との間に加えることができるバネ(4)と;前記インターフェース部が前記自由度で移動する方向を検出する部材と、前記可動ボディを前記インターフェース部に結合させる部材(6)であって、前記可動ボディ(3)を前記インターフェース部(7)に、前記インターフェース部の前記移動方向が、前記可動ボディの移動方向と反対になるときに結合させるように構成され、前記可動ボディを前記インターフェース部から、前記インターフェース部の方向が切り替わる前に、かつ前記インターフェース部の前記移動方向が、前記可動ボディの移動方向と一致するときに結合解除するように構成されている、前記結合させる部材(6)とを含んでいる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、振動運動の増幅に関し、特に、振動エネルギーを電気エネルギーに変換するための運動増幅に関するものである。
【背景技術】
【0002】
特定の環境、例えば危険な周囲環境では、または動いている機構では、電気回路を電源ケーブルに接続することが困難になることがある。この問題を軽減するために、振動エネルギーを電気エネルギーに変換するマイクロメカニカル素子が存在することは知られている。この素子は、機械または輸送手段のような振動支持体に広く取り付けられるマイクロシステムを構成している。ある1つの公知においては、共振系を使用して、支持体の機械振動を増幅し、増幅された運動を電気に変換する。
【0003】
共振系は、普通、支持体に剛性kを有するバネを介して取り付けられる可動マスmから成っている。この共振系は、次式により与えられる共振周波数frで共振する。
【数1】

【0004】
支持体にこの周波数の振動が生じると、可動マスも、この周波数で、かつ或る振幅で振動し始め、この振幅は、機械的な減衰によって、各サイクルで供給される機械エネルギーと厳密に等価なエネルギーが散逸するまで増大する。散逸エネルギーは、振幅の増大中に付加されるエネルギーよりも高速で増大し、最終的に、当該エネルギーと等しくなる。機械的な減衰が比較的小さい(機械的品質係数が高い)場合、機械増幅率(支持体の変位振幅に対する可動部分の変位振幅)は、数百の範囲とすることができる。機械増幅率が大きくなると、振動支持体を介して可動支持体に伝達されるエネルギーは大きくなる。電気的な減衰を主として利用して、マスを共振周波数で励振すると、入力振動に対する取り出し電気エネルギーは最大になる。
【0005】
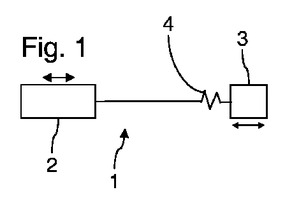
複数回のサイクルが繰り返されるときの、かつ繰り返される場合の各サイクルで吸収されるエネルギーの増大を更に高精度に確認するために、減衰が生じない状態の図1に示す共振系1の事例を、支持体の運動が、マス及びバネを設けることによる影響をほとんど受けないと仮定して取り上げることとする。この場合、
ΔVは、各半周期における可動部分の可動マス3の利得及び速度を絶対値で表わしたもの、
mは、可動マス3の質量、
fは、支持体2に関して設定される振動周波数、
frは、Hzで表わした場合のfに等しいマス構造3及び戻しバネ4から成る構造体の共振周波数、
Vm0は、マス3の初期速度である。
マスの運動エネルギーは、初期段階では次のようになる:
【数2】
従って、半周期後、マスの運動エネルギーは次のようになる:
【数3】
1周期後、マスの運動エネルギーは従って次のようになる:
【数4】
従って、マスの運動エネルギー利得は次のようになる:
【数5】
【0006】
しかしながら、振動周波数が共振周波数から離れると直ぐに、マスの相対変位量、及び支持体の相対変位量は、期間の大半に亘って、位相ずれしている。機械的品質係数が低下することにより、生成することができる電気エネルギーの量は少なくなる。
【0007】
この問題を解決するために、異なる共振周波数を有する直列接続の共振系を使用する公知の方法がある。これにより、振動周波数範囲を大幅に広げるために十分な多量のエネルギーを生成することができる。しかし、共振構造は、同時には1つしか励振することができないので、このような構造体は、これを使用して生成することができるエネルギーに対応して、非常に嵩張ってしまう。
【0008】
また、特許文献1(フランス国特許第FR20055181号)には、非線形の挙動を呈するバネを設けた共振系を使用する方法が記載されている。この系は、マスと支持体との間の変位振幅とともに高くなる共振周波数を有する。しかしながら、この系の共振周波数がずれ、かつ振動の励振周波数に対して、必ずずれる。そのため、共振に関連する増幅率は、常に非常に低く抑えられる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】フランス国特許第FR20055181号
【発明の概要】
【課題を解決するための手段】
【0010】
本発明は、これらの不具合のうちの1つ以上を解決するもので、振動運動を増幅するマイクロメカニカル素子に関し、このマイクロメカニカル素子は、
−前記素子を振動部材に固く連結するインターフェース部と、
−前記インターフェース部に対して、少なくとも1つの自由度で移動可能に取り付けられている可動マスと、
−戻し力を、前記可動マスとインターフェース部との間に加えることができるバネと;
−前記インターフェース部が、前記自由度で変位する方向を検出する部材と
−前記可動マスを、前記インターフェース部に結合させる部材であって、前記可動マスを、前記インターフェース部に、前記インターフェース部の変位方向が、可動マスの変位方向と反対になるときに結合させるように構成され、かつ前記可動マスを、前記インターフェース部から、前記インターフェース部の方向が切り替わる前に、かつ前記インターフェース部の変位方向が、前記可動マスの変位方向と一致するときに、結合解除するように構成されている結合させる部材
とを備える。
【0011】
1つの変形例によれば、前記素子は、前記インターフェース部の最大速度を検出する部材を備え、前記結合部材は、前記可動マスをインターフェース部に、このインターフェース部が、インターフェース部の最大速度に達するときに結合させるように構成されている。
【0012】
更に別の変形例によれば、前記変位方向を検出する部材、及び/又は前記最大速度を検出する部材は、加速度計を備え、前記結合部材は、電気制御アクチュエータを含み、さらに前記素子は、前記アクチュエータを、前記加速度計による測定値に応じて制御する処理装置を備えている。
【0013】
別の変形例によれば、前記最大速度は、ゼロ値を横切るときの加速度の増加、及び減少の関数として検出される。
【0014】
更に別の変形例によれば、前記可動マスは、前記インターフェース部に対して並進移動することができ、前記結合部材は、前記マスの並進軸と直交する軸の回りを不平衡状態で回転するように取り付けられている釣合い重りを有し、この釣合い重りは、前記マスが、前記インターフェース部に結合されて、前記インターフェース部に対して、それぞれの方向に変位する2つの位置の間で回転するように取り付けられている。
【0015】
1つの変形例によれば、前記インターフェース部及び前記可動マスに、互いに対向する複数の溝付き導電性表面を設けてキャパシタを形成し、前記素子は、電圧をこれらの溝付き表面の間に選択的に印加して、前記インターフェース部、及び前記可動マスを結合させるか、または結合解除する制御回路を備えている。
【0016】
更に別の変形例によれば、前記制御回路は、形成される前記キャパシタに保持される電荷を選択的に放電させ、かつ蓄えるように構成されている。
【0017】
更に別の変形例によれば、前記可動マスは、前記インターフェース部に対して並進移動することができ、前記結合部材は、圧電素子を含み、この圧電素子を制御して、前記可動マスの変位方向と直交する方向に延伸させることにより、前記可動マスを、前記インターフェース部に結合させるようになっている。
【0018】
更に別の変形例によれば、前記圧電素子は、前記可動マスの変位方向と直交する方向に沿って延在し、撓むことにより、前記戻しバネを結合時に形成するようになっている。
【0019】
1つの変形例によれば、前記インターフェース部、可動マス、及び戻しバネは、シリコン基板に単体ユニットとして形成されている共通部材を構成している。
【0020】
更に別の変形例によれば、前記可動マスは、前記単体部材に固定される付加部材を備えている。
【0021】
別の変形例によれば、前記戻しバネは、前記単体部材内に形成されている弾性支柱とされている。
【0022】
更に別の変形例によれば、前記可動マスは、切り欠き部群及び隆起部群を交互に設けた結合部分を有し、前記結合部材は、前記結合部分の切り欠き部に結合時に挿入されるアクチュエータを含んでいる。
【0023】
1つの変形例によれば、前記素子は、前記可動マスの機械エネルギーを、電気エネルギーに変換する部材を備えている。
【0024】
本発明はまた、上に説明したマイクロメカニカル増幅素子と、このマイクロメカニカル素子のインターフェース部に固く連結される振動支持体とを備えるシステムに関し、前記振動部材は、前記マイクロメカニカル素子の質量よりも、少なくとも50倍大きい質量を有する。
【0025】
本発明は更に、振動運動をメカニカル素子により増幅する方法にも関するものであり、この方法は、
−前記振動部材に対して少なくとも1自由度で移動することができる可動マスを取り付け、かつ戻し力を、前記可動マスと前記振動部材との間に加えることができるバネを設けたマイクロメカニカル素子を提供するステップと、
−前記インターフェース部が、前記自由度で変位する方向を検出するステップと、
−前記可動マスを前記振動部材に、前記インターフェース部の前記変位方向が、前記可動マスの変位方向と反対になるときに結合させ、前記可動マスを前記インターフェース部から、前記振動部材の方向が切り替わる前に、かつ前記インターフェース部の前記変位方向が、前記可動マスの変位方向と一致するときに結合解除するステップ
とを含んでいる。
【0026】
本発明の他の特徴及び利点は、以下の説明を、添付の図面を参照して読むことにより、明らかになるものと思う。
【図面の簡単な説明】
【0027】
【図1】共振系を模式的に示す。
【図2】1つの実施例による振動増幅素子を模式的に示す。
【図3】第1の変形例による振動増幅素子を模式的に示す。
【図4】第2の変形例による増幅素子を模式的に示す。
【図5a】作動中の慣性結合素子の異なる位置を示す。
【図5b】作動中の慣性結合素子の異なる位置を示す。
【図5c】作動中の慣性結合素子の異なる位置を示す。
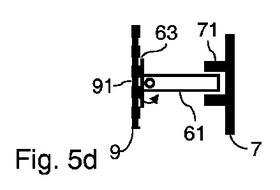
【図5d】作動中の慣性結合素子の異なる位置を示す。
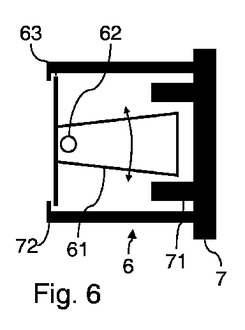
【図6】慣性結合素子の1つの変形例を模式的に示す。
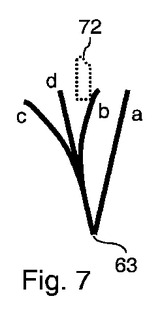
【図7】図6の機構のタブの異なる位置を示す。
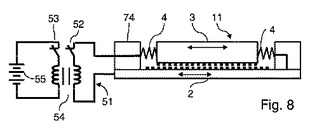
【図8】第3の変形例による振動増幅素子の側面図である。
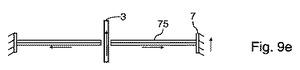
【図9a】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9b】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9c】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9d】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9e】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
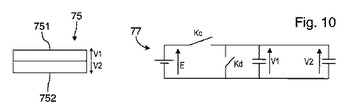
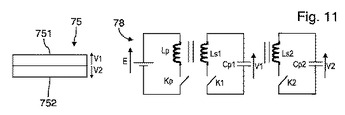
【図10】二重圧電薄板を制御する回路の別の例を示す。
【図11】二重圧電薄板を制御する回路の別の例を示す。
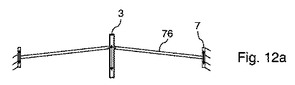
【図12a】第5の変形例による素子の動作のある段階における振動増幅素子を模式的に示す。
【図12b】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図12c】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図12d】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図12e】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
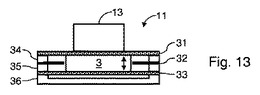
【図13】第6の変形例による振動増幅素子の断面図である。
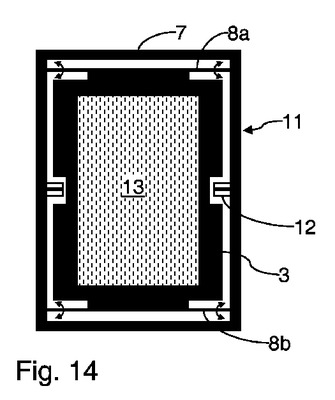
【図14】第7の変形例による振動増幅素子の平面図である。
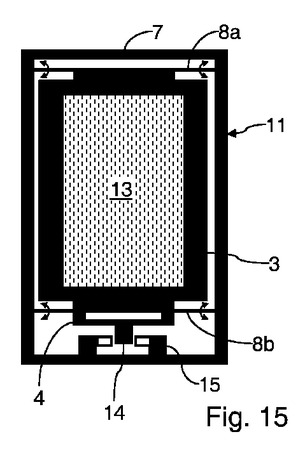
【図15】第8の変形例による振動増幅素子の平面図である。
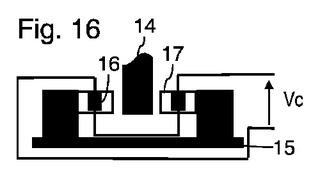
【図16】異なる結合機構を模式的に示す図である。
【図17】異なる結合機構を模式的に示す図である。
【図18】異なる結合機構を模式的に示す図である。
【図19】異なる結合機構を模式的に示す図である。
【図20】異なる結合機構を模式的に示す図である。
【発明を実施するための形態】
【0028】
本発明は、振動運動を増幅する擬似共振マイクロメカニカル素子の製造に関する。前記素子は、振動部材に対して動くことができる可動マスを備えている。バネから戻り力が、可動マスと振動部材との間に作用する。振動部材の変位方向が判断される。振動部材及び可動マスは、振動部材が可動マスの方向とは反対の方向に沿って変位するときに結合する。振動部材及び可動マスは、この振動部材が可動マスと同じ方向に移動するときに、振動部材が向きを変える前には必ず結合解除される。
【0029】
従って、振動部材は、可動マスの運動エネルギーを、振動周波数が、可動マス及びバネの共振周波数から離れるときにも大きくすることができる。従って、前記素子は、より大きい運動エネルギーを可動マスに、非常に広範囲の振動周波数に亘って生じさせると同時に、マイクロメカニカル素子を小型に保持する。本発明は、振動部材が非常に大きく変わる振動周波数を有する場合に、特に有利である。
【0030】
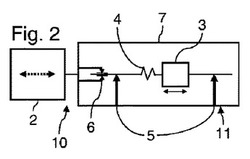
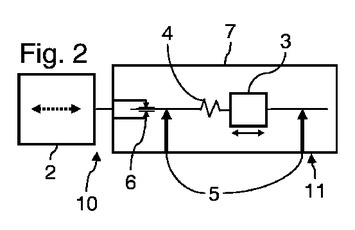
図2は、本発明を実施するように設計されている共振系10を模式的に示す。共振系10は、振動支持体2と、振動運動を増幅するマイクロメカニカル素子11とを備えている。振動支持体2は、増幅素子11の質量よりもはるかに大きい質量を有するか、または振動源に固く連結され、この振動源からの増幅素子11によるエネルギーの吸収は、無視することができる。支持体2は、少なくとも1つの振動成分を、点線矢印で示す方向に有する。不図示の加速度計は、支持体2の加速度を測定する。これらの加速度測定値から、支持体の振動方向に沿った支持体2の瞬時の変位方向が判断される。加速度の微分値の符号から、支持体2の変位方向を判断することができる。加速度の符号の変化から、通過時点を最大速度または最小速度によって判断することができる。符号が変化した後、加速度の符号が新しくなることによって、支持体が最小速度または最大速度になっているかどうかを判断することができる(この場合、zは、支持体2の位置を表わし、z”=0は、z’が極値を採ることを意味し、z”が0-から0+に変化するときにz’が最小値を採ることを意味し、z”が0+から0-に変化するときにz’が最大値を採ることを意味する)。
【0031】
増幅素子11は、振動支持体2と固く連結するためのインターフェース部を形成する包囲体7を有する。包囲体7は、適切な手段を介して支持体2に固定されている。包囲体7は、戻しバネ4の第1端部に固く連結された可動マス3を有している。符号が付されていないロッド群が、戻しバネ4の第2端部、及び可動マス3にそれぞれ固く連結されている。これらのロッドは、実線矢印で示す方向の着座部5を介して、支持体2の振動方向と同一直線上で並進移動するように案内される。結合部材6によって、マス3及び戻しバネ4により形成されているアセンブリを、包囲体7に選択的に結合させることができる。
【0032】
結合部材6を作動させることにより、可動マス3及び戻しバネ4により形成されているアセンブリを包囲体7に、支持体2の速度の向きが可動マス3の速度とは反対になるときに結合させるようになっている。このように、可動マス3の方向を強制的に切り替える。従って、可動マス3の運動エネルギーは、結合中に大きくなる。次に可動マス3及び支持体2が、同じ方向に沿って変位するようになると、結合部材6を制御して、可動マス3及び戻しバネ4により形成される集合体を包囲体7から解除する。この解除は、支持体の変位方向、または可動マス3の変位方向が切り替わる前に行なわれる必要がある。このように、可動マス3の運動エネルギーを支持体2が吸収することによって、可動マス3の運動が阻止されるのが防止される。従って結合期間は、支持体2の半振動周期よりも短く、可動マス3及び戻しバネ4により形成されているアセンブリの最終的な共振周期に、非常に有利に結び付けられる。共振周波数は、半共振周期が、支持体2の最長の半振動周期よりも短くなるように選択される。これは、可動マス3及び戻しバネ4により形成されているアセンブリに対応する共振周波数が、支持体2の最大周波数よりも高くなるように、当該共振周波数を選択するということになる。前記結合は、支持体2がその最大速度(絶対値で)に達するときに行なわれ、最大の運動エネルギーを可動マス3に伝達する。結合解除は、可動マス3及び戻しバネ4により形成されているアセンブリの1半共振周期分だけ遅れた時点で行なわれ、この半周期は、支持体2の半振動周期よりも短いので有利である。この速度は、ゼロ加速度が支持体2に関して検出されるときに極値(最大速度または最小速度)に達する。
【0033】
結合が行なわれている間の可動マス3の変位方向は、次のようにして推定することができる。共振周波数は、可動マス3から、そして戻しバネ4の剛性から求めることができるので、可動マス3の変位方向が切り替わる時点を求めるのは容易である。実際、可動マス3の変位の検出値は、結合が行なわれるたびに切り替わる。初期検出値が既知であり、かつ結合の回数がカウントされる(例えば、結合が行なわれるたびに偶数パリティ/奇数パリティレジスタの状態を切り替えることにより)場合、これらのデータから、進行中の変位の検出値を推定することができる。可動マス3に加速度計(図示せず)を付設することにより、可動マスの変位方向を判断することもできる。
【0034】
結合部材6は、この結合を、ロッドを戻しバネ4に締結して、強固に固着させることにより実現することができる。この結合は、適切な手段によって、例えば電磁アクチュエータ、静電アクチュエータ、熱アクチュエータ、または圧電アクチュエータによって行なうこともできる。結合部材6には、包囲体7の加速度計に接続される不図示の電子制御素子から指示を出すことができる。
【0035】
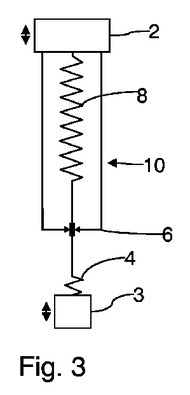
図3は、本発明による擬似的な共振を生じさせる共振系10の1つの変形例を示す模式図である。この例では、可動マス3及び戻しバネ4により形成されているアセンブリは、支持体2に対して、補助バネ8を介して並進移動するように案内される。ロッドは、戻しバネ4を補助バネ8の一方の端部に接続している。補助バネ8の他方の端部は、支持体2に固定されている。補助バネ8は、その軸が垂直になっているときに、可動マス3が並進移動するように案内することができる。補助バネ8の別の機能は、可動マス3を、当該マスの変位行程のほぼ中央部に位置決めし直し、かつこの行程の振幅を小さく抑えることである。結合部材6は、支持体2を、戻しバネ4及び8を連結するロッドに対して選択的に結合させるか、または結合解除する。
【0036】
補助バネ8は、戻しバネ4の剛性k1よりもはるかに低い剛性k2を有する。可動マス3及び戻しバネ4を含む系は、従って、第1共振周波数fr1を結合中に有し、第2共振周波数fr2を結合解除中に有する。第1及び第2共振周波数は、次の関係式を満たす。
【数6】
【数7】
【0037】
従って、可動マス3は、支持体2の振動周波数が共振周波数fr2よりも高い場合、可動マスの方向を、結合解除中に切り替えることがない。更に、補助バネ8を設けることによって、実際には、第1共振周波数、及び可動マス3を、支持体2に結合させることができる期間が変わってしまうことはない。
【0038】
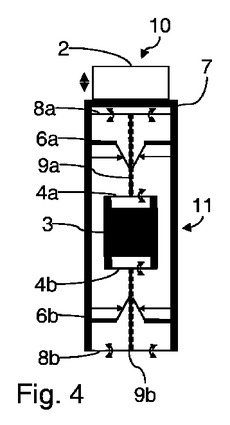
図4は、共振系10の別の変形例の平面図であり、この変形例は、シリコン構造として形成されるのに適している。振動運動を増幅する素子11は、支持体2に固く連結されている包囲体7を備えている。可動マス3は、包囲体7内に、支持体2の振動成分に対応する方向に移動することができるように取り付けられている。戻しバネ4a及び4bは、可動マス3の両端部の支柱の形態に形成されている。戻しバネ4a及び4bは、可動マス3の両端に埋め込まれて固定されている。ロッド9a及び9bは、一方の端部を介して、戻しバネ4a及び4bにそれぞれ固く連結されている。ロッド9a及び9bは、戻しバネ4a及び4bの中央部分に埋め込まれて固定されている。可動マス3とロッド9aまたは9bとの間の相対運動によって、戻しバネ4a及び4bを形成する支柱に撓みが生じる。増幅素子は更に、補助バネ8a及び8bを備え、これらの補助バネの中央部分には、ロッド9a及び9bの別の端部が、それぞれ埋め込まれている。補助バネ8a及び8bは、これらの補助バネの端部を介して、包囲体7内に埋め込まれている。補助バネ8a及び8bは、戻しバネ4a及び4bの剛性よりも、はるかに低い剛性を有する。補助バネ8a及び8bは、可動マス3の両側に取り付けられ、可動マス3を、包囲体7に対して並進移動するように案内している。
【0039】
2つの結合部材6a及び6bは、可動マス3の両側に配置されている。結合部材6a及び6bは、ロッド9a及び9bに形成される切り欠き部に挿入されるように作動する複数のタブを有する。タブが、これらの切り欠き部に挿入されると、ロッド9a及び9bは、包囲体7に対して動かなくなる。これらのタブは、包囲体7内に設けられている作製される支持体に固く連結されている。これらのタブの変位は、電気制御アクチュエータによって行なわれるので有利である。
【0040】
1つの変形例によれば、支柱4a及び4bの形態のバネを無くし、ロッド9a及び9bを可動マス3に直接埋め込んでいる。結合部材6a及び6bのタブを支持する支柱部材を細くすることにより、撓むことができるようにし、戻しバネを、これらのタブがロッド9a及び9bに結合されるときに形成することができる。
【0041】
図4の増幅素子11の構造は、シリコンウェハをエッチングすることにより形成することができる。増幅素子11の異なる機械構成要素は、単体部材として、シリコンウェハを厚さ方向にエッチングすることにより形成することができる。これらのバネの剛性は、種々の幅の支柱を形成することにより、定めることができる。
【0042】
増幅素子は、シリコン基板をエッチングすることにより形成することができ、このシリコン基板内には、加速度計が形成される。従って、この素子が占める空間を小さくし、この素子の品質を高めることができる。この品質が高くなるにつれて、所定量のエネルギーを生成するために必要な可動マスに課される制約が大きくなる。
【0043】
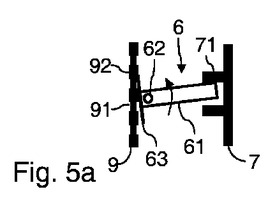
結合部材6は、電子制御回路を必要とすることなく、慣性作用を行なうことができる。図5a〜図5dは、可動マスに固く連結されているロッド9に対して、異なる位置になっている結合部材6を示している。結合部材6は、釣合い重り61と、回転案内ロッド62と、係止タブ63とを含んでいる。係止タブ63は、釣合い重り61に固定されている。案内ロッド62は、結合部材6を、可動マス3の変位方向と直交する軸の回りを回転するように案内する。案内ロッド62は、釣合い重り61と係止タブ63との間の接合部の近傍に配置され、大きな不平衡状態が案内ロッド62の回りに発生するようにする。
【0044】
包囲体7は、収納部71を有し、この収納部71には、釣合い重り61の遠位端が隙間を空けて収納されている。その他に、ロッド9は、一連の切り欠き部91を有し、これらの切り欠き部91は、ロッド9と結合部材6とを、係止タブ63が切り欠き部91に挿入されるときに結合させるように作用し、係止タブ63を、ロッド9の特定の運動によって解放するように作用することができる。
【0045】
図5aにおいて、支持体及び包囲体7が、上方に変位するのに対し、ロッド9及び可動マスは、下方に変位すると仮定する。包囲体7の変位速度が最大値に達した後、包囲体7は減速し始める。結合部材が運動エネルギーを持つことにより、結合部材6は、包囲体7の速度よりも大きい速度を、減速中に維持しようとする。不平衡になることにより、釣合い重り61が、矢印で示すように、案内ロッド62の回りを旋回する。この旋回中、係止タブ63の一方の端部が、切り欠き部91に挿入される。これらの反対方向の運動が、係止タブ63を切り欠き部91に押し込もうと作用する。その後すぐに、ロッド9が包囲体7と結合され、包囲体と同じ方向に、すなわち上方に変位する。収納部71の側方延出壁で、釣合い重り61の回転行程が制限される。
【0046】
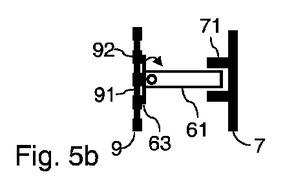
図5bでは、ロッド9は、その上向行程を継続する。包囲体7は、ゼロ速度に達し、そして次に、包囲体の変位方向を切り替えて、下方行程を開始する。これらの切り欠き部91を画定する隆起部92は、ロッド9の下方変位中に係止タブ63に当接するようになる。従って、係止タブ63は、当該タブが挿入されていた切り欠き部91から外れ、これによって、ロッド9は包囲体7から解除される。
【0047】
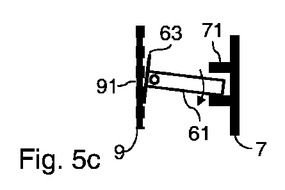
図5cでは、包囲体7がまず、下方に変位するのに対し、ロッド9はまず、上方に変位する。包囲体7の変位速度が最大値に達し、包囲体7は減速し始める。結合部材が運動エネルギーを持つことにより、結合部材6は、包囲体7の速度よりも大きい速度を、減速中に維持しようとする。不平衡になることにより、釣合い重り61が、矢印で示すように、ロッド62の回りを旋回する。この旋回中、係止タブ63の一方の端部が、切り欠き部91に挿入される。これは、ロッド9が包囲体7と結合され、そして包囲体と同じ方向に、すなわち下方に変位することを意味する。
【0048】
図5dでは、ロッド9は、下向行程を継続する。包囲体7は、ゼロ速度に達し、次に、包囲体の変位方向を切り替えて、上方行程を開始する。これらの切り欠き部91を画定する隆起部92は、ロッド9の下方変位中に、係止タブ63に当接するようになる。従って、係止タブ63は、それが挿入されていた切り欠き部91から外れ、ロッド9は包囲体7から結合解除される。
【0049】
この機構は、包囲体7とのロッド9の結合を、包囲体7の速度が最大になるときに可能にするので有利である。また、この機構によって、ロッド9を包囲体7から方向反転中に結合解除することができる。さらに、この機構によって、電子的な結合指示の複雑さを無くすことができる。
【0050】
この結合機構の動作を最適にするために、これらの切り欠き部91の間のピッチは、支持体の振動の平均振幅に比べて非常に小さい(例えば、この振幅の10%よりも小さい)ことが望ましい。更に、釣合い重り61の回転行程は、支持体の振動の振幅に比べて非常に短く、釣合い重り61が、支持体の変位方向、及び支持体の減速度を検出するように作用するので有利である。係止タブ63は、結合中の機械的な減衰を抑制するように形成されるので有利である。更に、係止タブ63は、ロッド9との摩擦を抑制して、増幅素子11の品質係数を高めるように形成されるので有利である。
【0051】
図6は、慣性結合素子の別の実施形態を示している。この変形例では、包囲体7は、可撓性係止タブ63の両端に配置された突起72を有する。これらの突起72は、釣合い重り61が回転している間の係止タブ63の動きを邪魔するようになっている。図7は、釣合い重り61が回転している間の突起72に対する係止タブ63の異なる位置を示している。aで示す位置では、釣合い重り61は回転を開始し、これによって、係止タブ63の端部が突起72に接近する。bで示す位置では、釣合い重り61によって、係止タブ63が突起72に接触するようになる。釣合い重り61が当該釣合い重りの回転運動を継続している状態では、係止タブ63は、突起72によって保持され、そして撓んで弾性エネルギーを蓄える。cで示す位置では、釣合い重り61が十分な距離を回転してしまうと、係止タブ63は、突起72により構成されている障害物を横切る。切り欠き部群を設けたロッドの方に向かう係止タブ63の運動は、弾性エネルギーが予め蓄えられているので、大きく加速される。従って、切り欠き部への係止タブ63の端部の嵌入が、迅速かつ確実に行なわれる。更に、突起72によって、係止タブ63が、結合解除位置にある隆起部群から離間した状態を保持することにより、摩擦を防止することができる。係止位置cには、突起72を横切る前に、係止タブ63に予め蓄えられているたわみ弾性エネルギーによってのみ到達する。ロッド9が、最終的に包囲体7の検出値に戻ると、係止タブ63は、切り欠き部91から外れるようになり、運動/潜在エネルギーが小さくなって、係止タブが、ロッドから離れた距離にある平衡位置dに位置するようになり、摩擦を生じるあらゆる危険を低く抑えることができる。
【0052】
図2〜図7には示していないが、振動を増幅する素子は、更に、可動マスの機械エネルギーを電気エネルギーに変換する部材を備えることができる。この目的のために、静電変換、電磁変換、または圧電変換を、可動マスと支持体との相対運動を利用することにより使用することができる(フランス国特許出願第FR2896635A1号に詳細に記載されているように)。変換器の例を、次に詳細に説明する。
【0053】
図8は、増幅素子11の別の実施形態を示している。支持体2は、振動成分を水平方向に有する。パッド74が支持体2に、可動マス3の両側で固定されている。可動マス3は、支持体2に対して並進移動することができる。可動マス3は、パッド74に、戻しバネ4を介して、それぞれ接続されている。支持体2、戻しバネ4、及び可動マス3は、導電性を有するか、または接続線群を有していて、電気回路を形成している。形成される電気回路は、以下の構成要素を直列に備えている。戻しバネ4、可動マス3の導電性部分、別の戻しバネ4、及び支持体2の導電性部分。制御素子51は、電気回路の両端に接続されている。制御回路51は、スイッチ52及び53と、変圧器54と、バッテリ55とを有する。
【0054】
可動マス3及び支持体2は、互いに対向するように配置された溝付き導電性表面を有する。これらの表面は、可動マス3の変位方向に交互に並んだ切り欠き部群及び隆起部群を有する。これらの溝付き表面は、同じピッチを有する。キャパシタが可動マス3と支持体2との間に形成され、このキャパシタの容量は、可動マスと支持体との相対位置の関数として変化する。
【0055】
可動マス3を支持体2と結合させることが望ましい場合、これらの溝付き表面を、スイッチ53を、次にスイッチ52を一時的に、かつ連続的に閉じることにより、バッテリ55から供給される電荷で帯電させる。スイッチ52及び53は、支持体2の最大速度が検出されるときに、かつこれらの溝付き表面の切り欠き部が互いに対向するときに閉じる。スイッチ52及び53は、形成されるキャパシタの両端に現われる電圧が最小になるか、または第1限界値を下回って元の値に戻るか、或いは再び第2限界値を超えるようになるときに、再び一時的に、かつ逆の順番で閉じることにより、電荷をキャパシタから取り出す。放電電圧が最小電圧Vminの場合、この放電時の容量は最大値Cmaxを有する。この場合は、結合が有効に行なわれる場合に対応し、可動マス3は、最大容量値を通り過ぎるときの他方の検出値を示すように効果的に分布配置される(電荷をキャパシタに注入することにより生じる静電気力は、可動マス3を阻止し、可動マス3の検出値を切り替えるために十分であった)。また、不完全な結合は、電気容量が当該容量の最大値を通り過ぎて元の値に戻る前に、電荷をほんの少しだけ取り出すことにより実現することができる、すなわち電圧が最小値を通り過ぎるのを待機するのではなく、電圧が閾値を下回って元の値に戻ろうとすると直ぐに、電荷の抜き取りを開始することにより実現することができる。この動作によって、少量の電気エネルギーを、結合が行なわれるたびに取り出すことができる(この電荷に関連する注入量またはエネルギー量E=1/2Q2/Cを下回る容量値の電荷の取り出し回数は、容量の低下とともに増加する)。
【0056】
可動マス3と支持体2との結合が実現する前に、可動マス3は、当該可動マスの行程を支持体2の方向と逆の方向に、当該支持体の運動エネルギーの影響を受けながら継続する。可動マス3の切り欠き部が、これらの溝付き表面の1ピッチの半分を移動する場合、これは、キャパシタに蓄えられる電荷が、結合を実現するためには十分ではないことを意味する。この中間位置では、容量が最小値Cminを有するのに対し、電気回路の両端に現われる電圧は最大値Vmaxを有する。次に、スイッチ52を一時的に閉じて、キャパシタに蓄積されているエネルギーを、変圧器54の磁気回路に向けて1次コイルを介して放出する。次に、スイッチ53を一時的に閉じて、磁気回路に蓄積されるエネルギーを、バッテリに変圧器54の2次コイルを介して伝達する。キャパシタへの電荷の注入は、最大容量になるまで行なわれるので、すなわちエネルギーが1/2Q2/Cmaxに等しくなるまで行なわれるので、このエネルギーの取り出しは、最小容量になるまで行なわれる、すなわち、エネルギーが1/2Q2/Cminに等しい値に戻るまで行なわれるので、1/2Q2(1/Cmin−1/Cmax)の余剰エネルギーが生成されている。
【0057】
従って、可動マス3は、その運動エネルギーのほんの一部を失う。その結果、これらの溝付き表面の切り欠き部が、再び互いに対向すると、スイッチ53を、そして次に、スイッチ52を、一時的に閉じて、可動マス3の結合、及び支持体2の結合を実現する。
【0058】
可動マス3及び支持体2が結合し、それに応じて、同じ方向に変位すると、スイッチ52を再び、一時的に閉じて、キャパシタに保持される電荷を空にし、次に、スイッチ52を開いたままにして、可動マス3が支持体2から結合解除されている状態を維持する。次に、スイッチ53を一時的に閉じて、キャパシタから放出され、かつスイッチ52を閉じている間に、変圧器54の磁気回路に一時的に蓄積されていた電荷を、バッテリ55に移動する。
【0059】
従って、制御回路51によって、結合/結合解除、及び可動マス3の運動により生成されるエネルギーの取り出しの両方が可能になる。
【0060】
十分短いピッチを有する溝付き表面を使用することにより、可動マス3と支持体2との結合を、可動マス3の全行程に亘って実現することができる。
【0061】
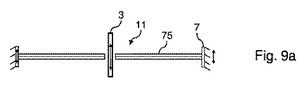
図9aは、増幅素子11の別の実施形態の模式図である。可動マス3は、包囲体7に対して変位方向に摺動するように取り付けられている。互いに対向するように配置されている二重圧電薄板群75は、一方の端部を介して包囲体7に埋め込まれ、可動マス3の変位と直交する方向に、かなりの距離に亘って延在している。これらの二重薄板75は、適切な電圧を、これらの二重薄板に印加することにより、これらの二重薄板の自由端で、可動マス3を把持し、そして包囲体7と可動マス3との結合を確実にするまで、可動マス3の方に向かって延伸するように制御される。これらの二重薄板が細長い構造であることによって、そしてこれらの二重薄板の配置が、可動マス3の運動と直交することによって、包囲体7と可動マス3との相対運動が行なわれるとした場合に、これらの二重薄板に、撓みが結合時に生じる。
【0062】
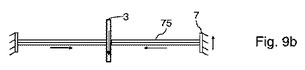
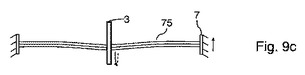
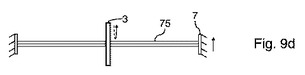
図9b〜図9eは、異なるフェーズ中の増幅素子11の作用を示している。図9bでは、可動マスが下方に変位するのに対し、包囲体7は上方に変位する。これらの反対方向の変位が生じている間に、これらの二重薄板75の延伸が始まる。次に、これらの二重薄板75によって、包囲体7と可動マス3との結合が実現する。可動マス3の下方移動は、一時的に継続して、これらの二重薄板75に曲げが生じる。これらの二重薄板75の撓みが最大になる(図9c)と、可動マス3は、最終的に、包囲体7に対してゼロの相対速度を持つ。図9dでは、可動マス3は、包囲体7の運動の影響、及びこれらの二重薄板75のバネ作用による戻し力の影響を受けて、包囲体7と同じ方向に沿って変位する。図9eでは、これらの二重薄板75は、可動マス3との結合を解除し始める。
【0063】
これらの二重圧電薄板75の使用によって、大きな結合力を可動マス3に作用させることができるので、有利であることが判明している。更に、これらの二重圧電薄板によって、これらの二重圧電薄板が適切なサイズになるとバネを形成することができ、圧電材料の構造的な減衰が小さいので、高い品質係数を得ることができる。更に、適切な制御系を適用することにより、これらの二重薄板が撓んでいるときのこれらの二重薄板の電圧差を大きくして、これらの二重薄板75に蓄えられるエネルギー(圧電材料内で機械的変形が電圧に変換される)を取り出し、可動マス3の運動エネルギーを電気エネルギーに変換することができる。これらの圧電材料は、これらの圧電材料を膨張または収縮させる結果として圧電材料に電荷を生じさせることができる。これらの圧電材料の機械/電気変換効率は、これらの圧電材料に加わる変形が迅速に進行するときに、一層高くなる。
【0064】
図10は、二重圧電薄板、及び二重圧電薄板に指示信号を出力するように設計されている回路の第1の実施形態を、模式的に示している。回路77は、電圧源Eと、スイッチKc及びKdと、電位V1及びV2を薄板751及び752にそれぞれ印加する端子群とを備えている。二重薄板75の延伸は、スイッチKcを閉じることにより、かつスイッチKdを開くことにより実現する。二重薄板75の収縮は、スイッチKcを開くことにより、かつスイッチKdを閉じることにより実現する。
【0065】
図11は、二重圧電薄板75を制御するように設計されている回路の第2の実施形態における二重圧電薄板75の模式図である。回路78によって、更に、二重薄板75に蓄えられる電気エネルギーを、電圧源Eに供給することができる。
【0066】
一時的にKpを閉じ、次に、K1及びK2を閉じることにより、エネルギーを電圧源Eから薄板751及び752に供給することができる。一時的にK1及びK2を閉じ、次に、Kpを閉じることにより、エネルギーを、これらの薄板から電圧源Eに供給することができる。
【0067】
結合を確実にするために、エネルギーを、電圧源Eから、これらの薄板に供給する。図9cに示すこれらの二重薄板75が、結合の後に撓むことによって、薄板751は、かつ第2薄板752が収縮するようになるので、電位V1が増加し、かつ電位V2が減少するようになる。撓みが最大になると、一時的にK1を閉じ、次に、Kpを閉じることにより、圧電薄板751(この圧電薄板の電圧は、当該圧電薄板が延伸しているときに増加している)に蓄えられる電荷の一部が、電圧源Eに移動する。同時に、電荷は、電圧源Eから第2薄板752に移動し、第2薄板752の電圧は、第2薄板752が収縮しているときに減少する。薄板751に収集される電荷が作る電位は、薄板752に移動する電荷が作る電位よりも高いので、収集される電荷、及び移動する電荷が同じである場合、電圧源Eは、当該電圧源Eが供給するエネルギーよりも大きいエネルギーを収集するので、当該電圧源Eのエネルギーは増加する(利得=1/2QΔV)。2枚の薄板751及び752が、伸縮方向が反対になるように変形することにより、電圧差がこれらの薄板の間に発生し、この電位差をゼロにすることにより、所謂電圧差エネルギーが取り出される。
【0068】
最後に、二重薄板75が撓みゼロ位置に(図9d〜図9e)戻ると、これらの2枚の薄板751及び752の各々に蓄えられるエネルギーは、電圧源Eに、一時的にK1を、そして次にKpを、そしてK2を、そして次に、Kpを閉じることにより供給される。次に、二重薄板75の延伸を生じるために最初に消費されるエネルギーであって、二重薄板75が撓みゼロ位置に戻っているときに再び生成される差エネルギーによって補充されるエネルギーは、電圧源Eに再び蓄えられる。磁気回路からの、または磁気回路へのエネルギー供給時間、従ってスイッチK1、K2、及びKpの閉鎖時間は、機械運動(数ミリ秒)または結合期間(数百μ秒)と比べると、非常に短い(数μ秒)。
【0069】
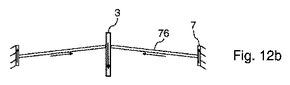
図12aは、増幅素子11の別の実施形態を模式的に示している。互いに対向するように配置される圧電薄板群76は、一方の端部を介して包囲体7に埋め込まれ、可動マス3が変位しているときの方向に直交する方向に対してわずかに傾斜する方向に延在する。これらの薄板76は、適切な電圧を、これらの薄板76に印加することにより、これらの薄板76が可動マス3の方に向かって、これらの薄板の自由端で当該マスを把持し、そして包囲体7と可動マス3との結合を確実にするまで延伸するように制御される。
【0070】
これらの薄板76は、可動マス3が下降するときに、可動マス3の結合を実現するように設計されている。不図示の他の薄板群は、逆の姿勢になることにより、可動マス3が上昇するときに、その結合を実現する。
【0071】
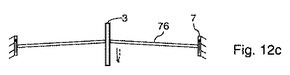
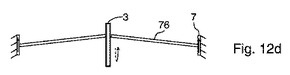
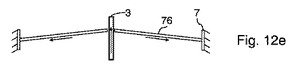
図12b〜図12eは、異なるフェーズ中の素子11の作用を示している。図12bでは、可動マス3が下方に変位するのに対し、包囲体7は上方に変位する。これらの反対方向の変位が生じている間、これらの薄板76の延伸が始まる。次に、これらの薄板76によって、包囲体7と可動マス3との結合が実現する。図12cでは、可動マス3の下方運動が一時的に継続すると、可動マス3の変位方向に対して、これらの薄板がわずかに傾斜しているので、これらの薄板76の圧縮が生じる。可動マス3は最終的に、包囲体7に対する速度がゼロになる。圧縮が生じるので、これらの薄板76によって、戻しバネ作用が働く。図12dでは、可動マス3は、包囲体7の運動の影響、及びこれらの薄板76の戻しバネ作用の影響を受けながら、包囲体7と同じ方向に変位する。図12eでは、これらの薄板76は、包囲体7の変位方向が切り替わる前に、可動マス3との結合を解除するように制御される。
【0072】
これらの薄板76に対して適切な指示をすることにより、これらの薄板76が結合時に圧縮されている間に蓄えられている電気エネルギーを取り出すことができる。
【0073】
図13は、増幅素子11の別の実施形態を示している。この素子11は、シリコン基板をエッチングし、そして加工するという実施形態に特に適していることが判明している。可動マス3は、そのうちの2つの面を介して、弾性膜31及び33に固く連結されている。これらの膜31及び33は、可動マス3の戻しバネを形成し、そして更に、可動マス3を、これらの膜の平面に直交する方向に沿って並進移動するように案内する。これらの弾性膜は、例えばポリイミドとすることができる。これらの弾性膜31及び33は、中間部分にエッチング形成されるシリコン層34及び35を挟んで離間させることにより、可動マス3を収容する。層34及び35は、膜31及び33にそれぞれ固く連結される。シリコンにより形成される中空部36は、膜33の下に固定される振動支持体に固く連結される。窪みを基台36の中央部分にエッチング形成して、可動マス3の遊びを可能にしている。付加マス13が、膜31の上側部分に固定される。この付加マス13を金属(例えば、タングステン)により形成して、共振系の質量を運動中に大きくすることができる。増幅素子11は、シリコン層34と35との間に配置された複数層32の積層体を有している。複数層32の積層体を適切な形状に形成して、二重圧電薄板を可動マス3の両側に形成する。適切な指示を出して、これらの二重薄板を、これらの二重薄板で可動マス3を基台36に結合させるまで延伸させる。これらの二重薄板は、可動マス3の運動エネルギーを電気エネルギーに変換するために使用することもできる。
【0074】
図14の例では、可動マス3、包囲体7、及び補助バネ8a及び8bは、単体ユニットとして形成されている。単体ユニット素子は、例えば金型成形することにより、またはシリコン層をエッチングすることにより形成することができる。この例では、補助バネ8a及び8bは、最初に可動マス3に埋め込まれ、次に、包囲体7に埋め込まれる弾性支柱により形成されている。これらの支柱は、可動マス3の変位方向と直交している。可動マス3は、共振系の質量を大きくするように設計された付加部材13を備えている。この付加マス13は、可動マス3のシリコン部分に接着することができる。2つの二重薄板12は、一方の端部を介して包囲体7に埋め込まれ、可動マス3の変位方向と直交して延在している。これらの二重薄板12は、可動マス3の両側に配置することにより、これらの二重薄板12から可動マス3に加わる力が打ち消されるようになっている。これらの二重薄板の他方の端部は、可動マス3と選択的に接触することにより、可動マスを包囲体7に結合させるように設計されている。これまでの例におけるように、包囲体7と可動マス3との結合は、これらの包囲体及び可動マスの変位方向が反対になるときに行なわれる。結合解除は、包囲体の変位方向、及び可動マス3の変位方向が一致するときに、好ましくは、包囲体7が、その最大速度に達するときに行なわれる。結合及び結合解除は、電子的に指示される。結合は、電圧を、これらの二重薄板12に印加して、これらの二重薄板を、可動マス3と接触するようになるまで延伸させることにより行なうことができる。包囲体7と可動マス3との結合が行なわれている間に、これらの二重薄板12は、バネとして作用して、可動マス3の運動エネルギーの影響を受けながら曲がることができる。このような二重薄板12が曲がっている間に、これらの圧電素子に電気エネルギーを蓄える。従って、これらの二重薄板12を適切な回路に選択的に接続することにより、可動マス3の運動エネルギーを電気エネルギーに変換することができる。
【0075】
図15は、増幅素子11の別の変形例を示している。この例では、可動マス3、包囲体7、戻しバネ4、及び補助バネ8a及び8bは、一体型単体ユニットとして形成されている。この単体部材を、シリコン層をエッチングすることにより形成すると有利である。この例では、補助バネ8a及び8bは、最初に可動マス3に埋め込まれ、次に包囲体7に埋め込まれる弾性支柱により形成されている。これらの支柱は、可動マス3の変位方向と直交して延在している。戻しバネ4は、両方の端部で包囲体7に埋め込まれて、可動マス3の変位方向と直交して延在する支柱の形態に形成される。戻しバネ4の剛性は、補助バネ8a及び8bの剛性よりもずっと大きい。可動マス3は、共振系の質量を大きくするように設計されている付加部材13を有する。突出部14は、戻しバネ4の支柱の中央部分に埋め込まれ、可動マス3の変位方向に延在している。結合部材は、包囲体7に固く連結される顎部15を有している。この顎部15は、突出部14を包囲体7に選択的に結合させる。
【0076】
これまでの例におけるように、包囲体7と可動マス3との結合は、これらの変位方向が反対になるときに行なわれる。結合解除は、可動マス3の変位方向、及び包囲体7の変位方向が一致しようとして、可動マス3の方向が切り替わっている最中に行なわれる。結合及び結合解除は、電子的に指示される。
【0077】
図15〜図20は、可動マス3と包囲体との結合部材の異なる実施形態を示している。これらの例では、結合部材は、可動マス3に固く連結されている突出部14を把持していが、この結合は、可動マス3に固く連結されている別の部材に対して行なうことができる。
【0078】
図16は、高い熱膨張率を有する把持部材17を備える顎部15を示している。加熱抵抗体16を、これらの把持部材17の内部に埋め込む。包囲体7を突出部14と結合させることが望ましい場合、制御電圧を、加熱抵抗体16の両端に印加する。その後すぐに、把持部材17で突出部14を把持し、動かないようにするまで膨張させる。把持部材17を、形状記憶材料により形成することもできる。顎部15は、シリコン支持体上に比較的容易に形成される。これらの顎部を作動させるためには、極めて小さいエネルギー、及び非常に低い電源電圧を用いて膨張させて、突出部14を把持するだけでよい。
【0079】
しかしながら、このような顎部15によって、電気エネルギーへの運動エネルギーの変換を達成することはできない。従って、図17の変形例では、高熱膨張率部材群28を二重圧電薄板29と組み合わせてある。これらの部材28は、包囲体7に埋め込まれ、これらの部材28の膨張は、電気抵抗体により制御される。これらの二重薄板29は、一方の端部を介して、部材28に埋め込まれている。これらの部材28が膨張している間、二重圧電薄板29の自由端は、突出部14と接触するようになって結合する。これまで詳細に説明してきた原理により、これらの二重薄板29が可動マス3の運動エネルギーによって結合時に変形している間に蓄えられる電気エネルギーは、電気回路によって取り出すことができる。
【0080】
図18は、別の構成の結合部材を表わしている。この実施形態では、導電部材20が枠部材に固く連結されている。顎部15は、導電ソケット19として形成されている。これらの顎部は、突出部14の両側に配置されている。突出部14は、それ自体が導電性であり、導電部材20に接続されている。導電ソケット19は、導電部材20から絶縁層18を挟んで分離されている。電圧差が導電ソケット19と導電部材20との間に生じると、静電気力が作用するため、これらの顎部15が撓み、突出部14に圧接する。
【0081】
図19は、結合部材の別の変形例を示している。この変形例では、結合部材は導電部材21を備えている。この部材21は、振動支持体に固く連結されている。この部材21は、導電プレート25に固く連結され、かつ接続されている。導電プレート23は、導電プレート25に対向するように配置されている。これらの導電プレート23は、その中央部分で、係止ロッド24と交差している。これらのロッド24は、導電部材21に対して、可撓性絶縁壁22を介して並進移動するように取り付けられている。これらの絶縁壁22が撓むと、突出部14の変位方向と直交する方向の並進変位が可能となる。電圧差が導電プレート23とプレート25との間に印加されると、静電気によって、導電プレート23は導電プレート25に対して変位する。次に、係止ロッド24は、隆起部群により画定され、かつ突出部14に形成された切り欠き部に係止するまで変位する。その後すぐに、係止ロッド24は、突出部14に結合される。突出部14の両側に形成されるこれらの切り欠き部は、この突出部14の変位方向に沿ってずれている。従って、これらの切り欠き部の分解能は、係止ロッド24を切り欠き部に、反対側の係止ロッド24が、隆起部に当接する場合に挿入することができるので高くなる。また、突出部14に沿った結合部材群の数、または他の突出部に設けられる結合部材群の数を大幅に増やすことができる。各部材の位置を、これらの切り欠き部に対して異なる態様で変えることにより、機能構造のこれらの係止ロッド24のうちの少なくとも1つの係止ロッド24が、切り欠き部に結合指示時にぴったり収まる確率が高くなる。係止ロッド24の端部を細くして、これらの切り欠き部へのこれらの係止ロッドの挿入を容易にすることもできる。
【0082】
可撓性絶縁壁22を、電気絶縁体ではなく、導電性とすることもできる。これらの絶縁壁22、及び導電プレート25は、絶縁支持体に固定されている。従って、絶縁壁22、及び導電プレート25は、この支持体によって電気的に絶縁される。
【0083】
図20は、結合部材の更に別の例を示す。この変形例では、顎部15に、磁歪材料により形成された把持部材27を設けてある。これらの把持部材27は、コイル26で取り囲まれている。電圧差が、コイル26の両端に印加されると、把持部材27は膨張し、突出部14を把持して、動かないようにする。
【0084】
これらの結合素子の各々に関して、前記アクチュエータまたはアクチュエータ群と可動部分との間隔を短くして(例えば、数μmの間隔)、アクチュエータの行程を小とし、従って結合を行わせるために必要なエネルギーを小さくすると有利である。
【0085】
それに加えて、支持体に、または増幅素子を固定する支持体のインターフェース部に加速度計を設けると、この加速度計が、発生する加速度の振幅を測定するので有利である。支持体の振動エネルギーが、十分なエネルギーを可動部材に伝えるためには不十分である場合、結合部材の作用を停止させて、この素子が、それが生成するよりも大きい電気エネルギーを消費することがないようにする。
【0086】
本明細書において記載した実施形態は、可動マスの並進運動を利用しているが、本発明は、可動マスの回転運動または回転成分を利用する機械的な増幅素子に適用することもできる。
【符号の説明】
【0087】
1,10 共振系
2 支持体
3 可動マス
4,4a,4b 戻しバネ
5 着座部
6,6a,6b 結合部材
7 包囲体
8,8a,8b 補助バネ
9,9a,9b ロッド
10 共振系
11 増幅素子
12 二重導板
13 付加部材
14 突出部
15 顎部
16 加熱抵抗体
17 把持部材
18 絶縁層
19 導電ソケット
20,21 導電部材
22 可撓性絶縁壁
23,25 導電プレート
24 係止ロッド
26 コイル
27 把持部材
28 高膨張率部材
29,75 二重圧電薄板
31,33 弾性膜
32 複数層
34,35 シリコン層
36 中空部、基台
51 制御素子
52,53 スイッチ
54 変圧器
55 バッテリ
61 釣合い重り
62 案内ロッド
63 係止タブ
71 収納部
72 突起
74 パッド
76 圧電薄板
77 回路
91 切り欠き部
92 隆起部
751,752 薄板
752 第2薄板
c 係止位置
Cmax 容量最大値
Cmin 容量最小値
d 平衡位置
E 電圧源
f 支持体の振動周波数
fr マス及びバネの共振周波数
fr1 第1共振周波数
fr2 第2共振周波数
k1,k2 剛性
Kc,Kd,Kp スイッチ
m マスの質量
V1,V2 電位
Vm0 マスの初期速度
Vmax 電圧最大値
Vmin 最小電圧
ΔV 可動マスの利得及び速度の絶対値
z 支持体の位置
【技術分野】
【0001】
本発明は、振動運動の増幅に関し、特に、振動エネルギーを電気エネルギーに変換するための運動増幅に関するものである。
【背景技術】
【0002】
特定の環境、例えば危険な周囲環境では、または動いている機構では、電気回路を電源ケーブルに接続することが困難になることがある。この問題を軽減するために、振動エネルギーを電気エネルギーに変換するマイクロメカニカル素子が存在することは知られている。この素子は、機械または輸送手段のような振動支持体に広く取り付けられるマイクロシステムを構成している。ある1つの公知においては、共振系を使用して、支持体の機械振動を増幅し、増幅された運動を電気に変換する。
【0003】
共振系は、普通、支持体に剛性kを有するバネを介して取り付けられる可動マスmから成っている。この共振系は、次式により与えられる共振周波数frで共振する。
【数1】
【0004】
支持体にこの周波数の振動が生じると、可動マスも、この周波数で、かつ或る振幅で振動し始め、この振幅は、機械的な減衰によって、各サイクルで供給される機械エネルギーと厳密に等価なエネルギーが散逸するまで増大する。散逸エネルギーは、振幅の増大中に付加されるエネルギーよりも高速で増大し、最終的に、当該エネルギーと等しくなる。機械的な減衰が比較的小さい(機械的品質係数が高い)場合、機械増幅率(支持体の変位振幅に対する可動部分の変位振幅)は、数百の範囲とすることができる。機械増幅率が大きくなると、振動支持体を介して可動支持体に伝達されるエネルギーは大きくなる。電気的な減衰を主として利用して、マスを共振周波数で励振すると、入力振動に対する取り出し電気エネルギーは最大になる。
【0005】
複数回のサイクルが繰り返されるときの、かつ繰り返される場合の各サイクルで吸収されるエネルギーの増大を更に高精度に確認するために、減衰が生じない状態の図1に示す共振系1の事例を、支持体の運動が、マス及びバネを設けることによる影響をほとんど受けないと仮定して取り上げることとする。この場合、
ΔVは、各半周期における可動部分の可動マス3の利得及び速度を絶対値で表わしたもの、
mは、可動マス3の質量、
fは、支持体2に関して設定される振動周波数、
frは、Hzで表わした場合のfに等しいマス構造3及び戻しバネ4から成る構造体の共振周波数、
Vm0は、マス3の初期速度である。
マスの運動エネルギーは、初期段階では次のようになる:
【数2】
従って、半周期後、マスの運動エネルギーは次のようになる:
【数3】
1周期後、マスの運動エネルギーは従って次のようになる:
【数4】
従って、マスの運動エネルギー利得は次のようになる:
【数5】
【0006】
しかしながら、振動周波数が共振周波数から離れると直ぐに、マスの相対変位量、及び支持体の相対変位量は、期間の大半に亘って、位相ずれしている。機械的品質係数が低下することにより、生成することができる電気エネルギーの量は少なくなる。
【0007】
この問題を解決するために、異なる共振周波数を有する直列接続の共振系を使用する公知の方法がある。これにより、振動周波数範囲を大幅に広げるために十分な多量のエネルギーを生成することができる。しかし、共振構造は、同時には1つしか励振することができないので、このような構造体は、これを使用して生成することができるエネルギーに対応して、非常に嵩張ってしまう。
【0008】
また、特許文献1(フランス国特許第FR20055181号)には、非線形の挙動を呈するバネを設けた共振系を使用する方法が記載されている。この系は、マスと支持体との間の変位振幅とともに高くなる共振周波数を有する。しかしながら、この系の共振周波数がずれ、かつ振動の励振周波数に対して、必ずずれる。そのため、共振に関連する増幅率は、常に非常に低く抑えられる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】フランス国特許第FR20055181号
【発明の概要】
【課題を解決するための手段】
【0010】
本発明は、これらの不具合のうちの1つ以上を解決するもので、振動運動を増幅するマイクロメカニカル素子に関し、このマイクロメカニカル素子は、
−前記素子を振動部材に固く連結するインターフェース部と、
−前記インターフェース部に対して、少なくとも1つの自由度で移動可能に取り付けられている可動マスと、
−戻し力を、前記可動マスとインターフェース部との間に加えることができるバネと;
−前記インターフェース部が、前記自由度で変位する方向を検出する部材と
−前記可動マスを、前記インターフェース部に結合させる部材であって、前記可動マスを、前記インターフェース部に、前記インターフェース部の変位方向が、可動マスの変位方向と反対になるときに結合させるように構成され、かつ前記可動マスを、前記インターフェース部から、前記インターフェース部の方向が切り替わる前に、かつ前記インターフェース部の変位方向が、前記可動マスの変位方向と一致するときに、結合解除するように構成されている結合させる部材
とを備える。
【0011】
1つの変形例によれば、前記素子は、前記インターフェース部の最大速度を検出する部材を備え、前記結合部材は、前記可動マスをインターフェース部に、このインターフェース部が、インターフェース部の最大速度に達するときに結合させるように構成されている。
【0012】
更に別の変形例によれば、前記変位方向を検出する部材、及び/又は前記最大速度を検出する部材は、加速度計を備え、前記結合部材は、電気制御アクチュエータを含み、さらに前記素子は、前記アクチュエータを、前記加速度計による測定値に応じて制御する処理装置を備えている。
【0013】
別の変形例によれば、前記最大速度は、ゼロ値を横切るときの加速度の増加、及び減少の関数として検出される。
【0014】
更に別の変形例によれば、前記可動マスは、前記インターフェース部に対して並進移動することができ、前記結合部材は、前記マスの並進軸と直交する軸の回りを不平衡状態で回転するように取り付けられている釣合い重りを有し、この釣合い重りは、前記マスが、前記インターフェース部に結合されて、前記インターフェース部に対して、それぞれの方向に変位する2つの位置の間で回転するように取り付けられている。
【0015】
1つの変形例によれば、前記インターフェース部及び前記可動マスに、互いに対向する複数の溝付き導電性表面を設けてキャパシタを形成し、前記素子は、電圧をこれらの溝付き表面の間に選択的に印加して、前記インターフェース部、及び前記可動マスを結合させるか、または結合解除する制御回路を備えている。
【0016】
更に別の変形例によれば、前記制御回路は、形成される前記キャパシタに保持される電荷を選択的に放電させ、かつ蓄えるように構成されている。
【0017】
更に別の変形例によれば、前記可動マスは、前記インターフェース部に対して並進移動することができ、前記結合部材は、圧電素子を含み、この圧電素子を制御して、前記可動マスの変位方向と直交する方向に延伸させることにより、前記可動マスを、前記インターフェース部に結合させるようになっている。
【0018】
更に別の変形例によれば、前記圧電素子は、前記可動マスの変位方向と直交する方向に沿って延在し、撓むことにより、前記戻しバネを結合時に形成するようになっている。
【0019】
1つの変形例によれば、前記インターフェース部、可動マス、及び戻しバネは、シリコン基板に単体ユニットとして形成されている共通部材を構成している。
【0020】
更に別の変形例によれば、前記可動マスは、前記単体部材に固定される付加部材を備えている。
【0021】
別の変形例によれば、前記戻しバネは、前記単体部材内に形成されている弾性支柱とされている。
【0022】
更に別の変形例によれば、前記可動マスは、切り欠き部群及び隆起部群を交互に設けた結合部分を有し、前記結合部材は、前記結合部分の切り欠き部に結合時に挿入されるアクチュエータを含んでいる。
【0023】
1つの変形例によれば、前記素子は、前記可動マスの機械エネルギーを、電気エネルギーに変換する部材を備えている。
【0024】
本発明はまた、上に説明したマイクロメカニカル増幅素子と、このマイクロメカニカル素子のインターフェース部に固く連結される振動支持体とを備えるシステムに関し、前記振動部材は、前記マイクロメカニカル素子の質量よりも、少なくとも50倍大きい質量を有する。
【0025】
本発明は更に、振動運動をメカニカル素子により増幅する方法にも関するものであり、この方法は、
−前記振動部材に対して少なくとも1自由度で移動することができる可動マスを取り付け、かつ戻し力を、前記可動マスと前記振動部材との間に加えることができるバネを設けたマイクロメカニカル素子を提供するステップと、
−前記インターフェース部が、前記自由度で変位する方向を検出するステップと、
−前記可動マスを前記振動部材に、前記インターフェース部の前記変位方向が、前記可動マスの変位方向と反対になるときに結合させ、前記可動マスを前記インターフェース部から、前記振動部材の方向が切り替わる前に、かつ前記インターフェース部の前記変位方向が、前記可動マスの変位方向と一致するときに結合解除するステップ
とを含んでいる。
【0026】
本発明の他の特徴及び利点は、以下の説明を、添付の図面を参照して読むことにより、明らかになるものと思う。
【図面の簡単な説明】
【0027】
【図1】共振系を模式的に示す。
【図2】1つの実施例による振動増幅素子を模式的に示す。
【図3】第1の変形例による振動増幅素子を模式的に示す。
【図4】第2の変形例による増幅素子を模式的に示す。
【図5a】作動中の慣性結合素子の異なる位置を示す。
【図5b】作動中の慣性結合素子の異なる位置を示す。
【図5c】作動中の慣性結合素子の異なる位置を示す。
【図5d】作動中の慣性結合素子の異なる位置を示す。
【図6】慣性結合素子の1つの変形例を模式的に示す。
【図7】図6の機構のタブの異なる位置を示す。
【図8】第3の変形例による振動増幅素子の側面図である。
【図9a】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9b】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9c】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9d】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図9e】第4の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図10】二重圧電薄板を制御する回路の別の例を示す。
【図11】二重圧電薄板を制御する回路の別の例を示す。
【図12a】第5の変形例による素子の動作のある段階における振動増幅素子を模式的に示す。
【図12b】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図12c】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図12d】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図12e】第5の変形例による素子の動作の異なる段階における振動増幅素子を模式的に示す。
【図13】第6の変形例による振動増幅素子の断面図である。
【図14】第7の変形例による振動増幅素子の平面図である。
【図15】第8の変形例による振動増幅素子の平面図である。
【図16】異なる結合機構を模式的に示す図である。
【図17】異なる結合機構を模式的に示す図である。
【図18】異なる結合機構を模式的に示す図である。
【図19】異なる結合機構を模式的に示す図である。
【図20】異なる結合機構を模式的に示す図である。
【発明を実施するための形態】
【0028】
本発明は、振動運動を増幅する擬似共振マイクロメカニカル素子の製造に関する。前記素子は、振動部材に対して動くことができる可動マスを備えている。バネから戻り力が、可動マスと振動部材との間に作用する。振動部材の変位方向が判断される。振動部材及び可動マスは、振動部材が可動マスの方向とは反対の方向に沿って変位するときに結合する。振動部材及び可動マスは、この振動部材が可動マスと同じ方向に移動するときに、振動部材が向きを変える前には必ず結合解除される。
【0029】
従って、振動部材は、可動マスの運動エネルギーを、振動周波数が、可動マス及びバネの共振周波数から離れるときにも大きくすることができる。従って、前記素子は、より大きい運動エネルギーを可動マスに、非常に広範囲の振動周波数に亘って生じさせると同時に、マイクロメカニカル素子を小型に保持する。本発明は、振動部材が非常に大きく変わる振動周波数を有する場合に、特に有利である。
【0030】
図2は、本発明を実施するように設計されている共振系10を模式的に示す。共振系10は、振動支持体2と、振動運動を増幅するマイクロメカニカル素子11とを備えている。振動支持体2は、増幅素子11の質量よりもはるかに大きい質量を有するか、または振動源に固く連結され、この振動源からの増幅素子11によるエネルギーの吸収は、無視することができる。支持体2は、少なくとも1つの振動成分を、点線矢印で示す方向に有する。不図示の加速度計は、支持体2の加速度を測定する。これらの加速度測定値から、支持体の振動方向に沿った支持体2の瞬時の変位方向が判断される。加速度の微分値の符号から、支持体2の変位方向を判断することができる。加速度の符号の変化から、通過時点を最大速度または最小速度によって判断することができる。符号が変化した後、加速度の符号が新しくなることによって、支持体が最小速度または最大速度になっているかどうかを判断することができる(この場合、zは、支持体2の位置を表わし、z”=0は、z’が極値を採ることを意味し、z”が0-から0+に変化するときにz’が最小値を採ることを意味し、z”が0+から0-に変化するときにz’が最大値を採ることを意味する)。
【0031】
増幅素子11は、振動支持体2と固く連結するためのインターフェース部を形成する包囲体7を有する。包囲体7は、適切な手段を介して支持体2に固定されている。包囲体7は、戻しバネ4の第1端部に固く連結された可動マス3を有している。符号が付されていないロッド群が、戻しバネ4の第2端部、及び可動マス3にそれぞれ固く連結されている。これらのロッドは、実線矢印で示す方向の着座部5を介して、支持体2の振動方向と同一直線上で並進移動するように案内される。結合部材6によって、マス3及び戻しバネ4により形成されているアセンブリを、包囲体7に選択的に結合させることができる。
【0032】
結合部材6を作動させることにより、可動マス3及び戻しバネ4により形成されているアセンブリを包囲体7に、支持体2の速度の向きが可動マス3の速度とは反対になるときに結合させるようになっている。このように、可動マス3の方向を強制的に切り替える。従って、可動マス3の運動エネルギーは、結合中に大きくなる。次に可動マス3及び支持体2が、同じ方向に沿って変位するようになると、結合部材6を制御して、可動マス3及び戻しバネ4により形成される集合体を包囲体7から解除する。この解除は、支持体の変位方向、または可動マス3の変位方向が切り替わる前に行なわれる必要がある。このように、可動マス3の運動エネルギーを支持体2が吸収することによって、可動マス3の運動が阻止されるのが防止される。従って結合期間は、支持体2の半振動周期よりも短く、可動マス3及び戻しバネ4により形成されているアセンブリの最終的な共振周期に、非常に有利に結び付けられる。共振周波数は、半共振周期が、支持体2の最長の半振動周期よりも短くなるように選択される。これは、可動マス3及び戻しバネ4により形成されているアセンブリに対応する共振周波数が、支持体2の最大周波数よりも高くなるように、当該共振周波数を選択するということになる。前記結合は、支持体2がその最大速度(絶対値で)に達するときに行なわれ、最大の運動エネルギーを可動マス3に伝達する。結合解除は、可動マス3及び戻しバネ4により形成されているアセンブリの1半共振周期分だけ遅れた時点で行なわれ、この半周期は、支持体2の半振動周期よりも短いので有利である。この速度は、ゼロ加速度が支持体2に関して検出されるときに極値(最大速度または最小速度)に達する。
【0033】
結合が行なわれている間の可動マス3の変位方向は、次のようにして推定することができる。共振周波数は、可動マス3から、そして戻しバネ4の剛性から求めることができるので、可動マス3の変位方向が切り替わる時点を求めるのは容易である。実際、可動マス3の変位の検出値は、結合が行なわれるたびに切り替わる。初期検出値が既知であり、かつ結合の回数がカウントされる(例えば、結合が行なわれるたびに偶数パリティ/奇数パリティレジスタの状態を切り替えることにより)場合、これらのデータから、進行中の変位の検出値を推定することができる。可動マス3に加速度計(図示せず)を付設することにより、可動マスの変位方向を判断することもできる。
【0034】
結合部材6は、この結合を、ロッドを戻しバネ4に締結して、強固に固着させることにより実現することができる。この結合は、適切な手段によって、例えば電磁アクチュエータ、静電アクチュエータ、熱アクチュエータ、または圧電アクチュエータによって行なうこともできる。結合部材6には、包囲体7の加速度計に接続される不図示の電子制御素子から指示を出すことができる。
【0035】
図3は、本発明による擬似的な共振を生じさせる共振系10の1つの変形例を示す模式図である。この例では、可動マス3及び戻しバネ4により形成されているアセンブリは、支持体2に対して、補助バネ8を介して並進移動するように案内される。ロッドは、戻しバネ4を補助バネ8の一方の端部に接続している。補助バネ8の他方の端部は、支持体2に固定されている。補助バネ8は、その軸が垂直になっているときに、可動マス3が並進移動するように案内することができる。補助バネ8の別の機能は、可動マス3を、当該マスの変位行程のほぼ中央部に位置決めし直し、かつこの行程の振幅を小さく抑えることである。結合部材6は、支持体2を、戻しバネ4及び8を連結するロッドに対して選択的に結合させるか、または結合解除する。
【0036】
補助バネ8は、戻しバネ4の剛性k1よりもはるかに低い剛性k2を有する。可動マス3及び戻しバネ4を含む系は、従って、第1共振周波数fr1を結合中に有し、第2共振周波数fr2を結合解除中に有する。第1及び第2共振周波数は、次の関係式を満たす。
【数6】
【数7】
【0037】
従って、可動マス3は、支持体2の振動周波数が共振周波数fr2よりも高い場合、可動マスの方向を、結合解除中に切り替えることがない。更に、補助バネ8を設けることによって、実際には、第1共振周波数、及び可動マス3を、支持体2に結合させることができる期間が変わってしまうことはない。
【0038】
図4は、共振系10の別の変形例の平面図であり、この変形例は、シリコン構造として形成されるのに適している。振動運動を増幅する素子11は、支持体2に固く連結されている包囲体7を備えている。可動マス3は、包囲体7内に、支持体2の振動成分に対応する方向に移動することができるように取り付けられている。戻しバネ4a及び4bは、可動マス3の両端部の支柱の形態に形成されている。戻しバネ4a及び4bは、可動マス3の両端に埋め込まれて固定されている。ロッド9a及び9bは、一方の端部を介して、戻しバネ4a及び4bにそれぞれ固く連結されている。ロッド9a及び9bは、戻しバネ4a及び4bの中央部分に埋め込まれて固定されている。可動マス3とロッド9aまたは9bとの間の相対運動によって、戻しバネ4a及び4bを形成する支柱に撓みが生じる。増幅素子は更に、補助バネ8a及び8bを備え、これらの補助バネの中央部分には、ロッド9a及び9bの別の端部が、それぞれ埋め込まれている。補助バネ8a及び8bは、これらの補助バネの端部を介して、包囲体7内に埋め込まれている。補助バネ8a及び8bは、戻しバネ4a及び4bの剛性よりも、はるかに低い剛性を有する。補助バネ8a及び8bは、可動マス3の両側に取り付けられ、可動マス3を、包囲体7に対して並進移動するように案内している。
【0039】
2つの結合部材6a及び6bは、可動マス3の両側に配置されている。結合部材6a及び6bは、ロッド9a及び9bに形成される切り欠き部に挿入されるように作動する複数のタブを有する。タブが、これらの切り欠き部に挿入されると、ロッド9a及び9bは、包囲体7に対して動かなくなる。これらのタブは、包囲体7内に設けられている作製される支持体に固く連結されている。これらのタブの変位は、電気制御アクチュエータによって行なわれるので有利である。
【0040】
1つの変形例によれば、支柱4a及び4bの形態のバネを無くし、ロッド9a及び9bを可動マス3に直接埋め込んでいる。結合部材6a及び6bのタブを支持する支柱部材を細くすることにより、撓むことができるようにし、戻しバネを、これらのタブがロッド9a及び9bに結合されるときに形成することができる。
【0041】
図4の増幅素子11の構造は、シリコンウェハをエッチングすることにより形成することができる。増幅素子11の異なる機械構成要素は、単体部材として、シリコンウェハを厚さ方向にエッチングすることにより形成することができる。これらのバネの剛性は、種々の幅の支柱を形成することにより、定めることができる。
【0042】
増幅素子は、シリコン基板をエッチングすることにより形成することができ、このシリコン基板内には、加速度計が形成される。従って、この素子が占める空間を小さくし、この素子の品質を高めることができる。この品質が高くなるにつれて、所定量のエネルギーを生成するために必要な可動マスに課される制約が大きくなる。
【0043】
結合部材6は、電子制御回路を必要とすることなく、慣性作用を行なうことができる。図5a〜図5dは、可動マスに固く連結されているロッド9に対して、異なる位置になっている結合部材6を示している。結合部材6は、釣合い重り61と、回転案内ロッド62と、係止タブ63とを含んでいる。係止タブ63は、釣合い重り61に固定されている。案内ロッド62は、結合部材6を、可動マス3の変位方向と直交する軸の回りを回転するように案内する。案内ロッド62は、釣合い重り61と係止タブ63との間の接合部の近傍に配置され、大きな不平衡状態が案内ロッド62の回りに発生するようにする。
【0044】
包囲体7は、収納部71を有し、この収納部71には、釣合い重り61の遠位端が隙間を空けて収納されている。その他に、ロッド9は、一連の切り欠き部91を有し、これらの切り欠き部91は、ロッド9と結合部材6とを、係止タブ63が切り欠き部91に挿入されるときに結合させるように作用し、係止タブ63を、ロッド9の特定の運動によって解放するように作用することができる。
【0045】
図5aにおいて、支持体及び包囲体7が、上方に変位するのに対し、ロッド9及び可動マスは、下方に変位すると仮定する。包囲体7の変位速度が最大値に達した後、包囲体7は減速し始める。結合部材が運動エネルギーを持つことにより、結合部材6は、包囲体7の速度よりも大きい速度を、減速中に維持しようとする。不平衡になることにより、釣合い重り61が、矢印で示すように、案内ロッド62の回りを旋回する。この旋回中、係止タブ63の一方の端部が、切り欠き部91に挿入される。これらの反対方向の運動が、係止タブ63を切り欠き部91に押し込もうと作用する。その後すぐに、ロッド9が包囲体7と結合され、包囲体と同じ方向に、すなわち上方に変位する。収納部71の側方延出壁で、釣合い重り61の回転行程が制限される。
【0046】
図5bでは、ロッド9は、その上向行程を継続する。包囲体7は、ゼロ速度に達し、そして次に、包囲体の変位方向を切り替えて、下方行程を開始する。これらの切り欠き部91を画定する隆起部92は、ロッド9の下方変位中に係止タブ63に当接するようになる。従って、係止タブ63は、当該タブが挿入されていた切り欠き部91から外れ、これによって、ロッド9は包囲体7から解除される。
【0047】
図5cでは、包囲体7がまず、下方に変位するのに対し、ロッド9はまず、上方に変位する。包囲体7の変位速度が最大値に達し、包囲体7は減速し始める。結合部材が運動エネルギーを持つことにより、結合部材6は、包囲体7の速度よりも大きい速度を、減速中に維持しようとする。不平衡になることにより、釣合い重り61が、矢印で示すように、ロッド62の回りを旋回する。この旋回中、係止タブ63の一方の端部が、切り欠き部91に挿入される。これは、ロッド9が包囲体7と結合され、そして包囲体と同じ方向に、すなわち下方に変位することを意味する。
【0048】
図5dでは、ロッド9は、下向行程を継続する。包囲体7は、ゼロ速度に達し、次に、包囲体の変位方向を切り替えて、上方行程を開始する。これらの切り欠き部91を画定する隆起部92は、ロッド9の下方変位中に、係止タブ63に当接するようになる。従って、係止タブ63は、それが挿入されていた切り欠き部91から外れ、ロッド9は包囲体7から結合解除される。
【0049】
この機構は、包囲体7とのロッド9の結合を、包囲体7の速度が最大になるときに可能にするので有利である。また、この機構によって、ロッド9を包囲体7から方向反転中に結合解除することができる。さらに、この機構によって、電子的な結合指示の複雑さを無くすことができる。
【0050】
この結合機構の動作を最適にするために、これらの切り欠き部91の間のピッチは、支持体の振動の平均振幅に比べて非常に小さい(例えば、この振幅の10%よりも小さい)ことが望ましい。更に、釣合い重り61の回転行程は、支持体の振動の振幅に比べて非常に短く、釣合い重り61が、支持体の変位方向、及び支持体の減速度を検出するように作用するので有利である。係止タブ63は、結合中の機械的な減衰を抑制するように形成されるので有利である。更に、係止タブ63は、ロッド9との摩擦を抑制して、増幅素子11の品質係数を高めるように形成されるので有利である。
【0051】
図6は、慣性結合素子の別の実施形態を示している。この変形例では、包囲体7は、可撓性係止タブ63の両端に配置された突起72を有する。これらの突起72は、釣合い重り61が回転している間の係止タブ63の動きを邪魔するようになっている。図7は、釣合い重り61が回転している間の突起72に対する係止タブ63の異なる位置を示している。aで示す位置では、釣合い重り61は回転を開始し、これによって、係止タブ63の端部が突起72に接近する。bで示す位置では、釣合い重り61によって、係止タブ63が突起72に接触するようになる。釣合い重り61が当該釣合い重りの回転運動を継続している状態では、係止タブ63は、突起72によって保持され、そして撓んで弾性エネルギーを蓄える。cで示す位置では、釣合い重り61が十分な距離を回転してしまうと、係止タブ63は、突起72により構成されている障害物を横切る。切り欠き部群を設けたロッドの方に向かう係止タブ63の運動は、弾性エネルギーが予め蓄えられているので、大きく加速される。従って、切り欠き部への係止タブ63の端部の嵌入が、迅速かつ確実に行なわれる。更に、突起72によって、係止タブ63が、結合解除位置にある隆起部群から離間した状態を保持することにより、摩擦を防止することができる。係止位置cには、突起72を横切る前に、係止タブ63に予め蓄えられているたわみ弾性エネルギーによってのみ到達する。ロッド9が、最終的に包囲体7の検出値に戻ると、係止タブ63は、切り欠き部91から外れるようになり、運動/潜在エネルギーが小さくなって、係止タブが、ロッドから離れた距離にある平衡位置dに位置するようになり、摩擦を生じるあらゆる危険を低く抑えることができる。
【0052】
図2〜図7には示していないが、振動を増幅する素子は、更に、可動マスの機械エネルギーを電気エネルギーに変換する部材を備えることができる。この目的のために、静電変換、電磁変換、または圧電変換を、可動マスと支持体との相対運動を利用することにより使用することができる(フランス国特許出願第FR2896635A1号に詳細に記載されているように)。変換器の例を、次に詳細に説明する。
【0053】
図8は、増幅素子11の別の実施形態を示している。支持体2は、振動成分を水平方向に有する。パッド74が支持体2に、可動マス3の両側で固定されている。可動マス3は、支持体2に対して並進移動することができる。可動マス3は、パッド74に、戻しバネ4を介して、それぞれ接続されている。支持体2、戻しバネ4、及び可動マス3は、導電性を有するか、または接続線群を有していて、電気回路を形成している。形成される電気回路は、以下の構成要素を直列に備えている。戻しバネ4、可動マス3の導電性部分、別の戻しバネ4、及び支持体2の導電性部分。制御素子51は、電気回路の両端に接続されている。制御回路51は、スイッチ52及び53と、変圧器54と、バッテリ55とを有する。
【0054】
可動マス3及び支持体2は、互いに対向するように配置された溝付き導電性表面を有する。これらの表面は、可動マス3の変位方向に交互に並んだ切り欠き部群及び隆起部群を有する。これらの溝付き表面は、同じピッチを有する。キャパシタが可動マス3と支持体2との間に形成され、このキャパシタの容量は、可動マスと支持体との相対位置の関数として変化する。
【0055】
可動マス3を支持体2と結合させることが望ましい場合、これらの溝付き表面を、スイッチ53を、次にスイッチ52を一時的に、かつ連続的に閉じることにより、バッテリ55から供給される電荷で帯電させる。スイッチ52及び53は、支持体2の最大速度が検出されるときに、かつこれらの溝付き表面の切り欠き部が互いに対向するときに閉じる。スイッチ52及び53は、形成されるキャパシタの両端に現われる電圧が最小になるか、または第1限界値を下回って元の値に戻るか、或いは再び第2限界値を超えるようになるときに、再び一時的に、かつ逆の順番で閉じることにより、電荷をキャパシタから取り出す。放電電圧が最小電圧Vminの場合、この放電時の容量は最大値Cmaxを有する。この場合は、結合が有効に行なわれる場合に対応し、可動マス3は、最大容量値を通り過ぎるときの他方の検出値を示すように効果的に分布配置される(電荷をキャパシタに注入することにより生じる静電気力は、可動マス3を阻止し、可動マス3の検出値を切り替えるために十分であった)。また、不完全な結合は、電気容量が当該容量の最大値を通り過ぎて元の値に戻る前に、電荷をほんの少しだけ取り出すことにより実現することができる、すなわち電圧が最小値を通り過ぎるのを待機するのではなく、電圧が閾値を下回って元の値に戻ろうとすると直ぐに、電荷の抜き取りを開始することにより実現することができる。この動作によって、少量の電気エネルギーを、結合が行なわれるたびに取り出すことができる(この電荷に関連する注入量またはエネルギー量E=1/2Q2/Cを下回る容量値の電荷の取り出し回数は、容量の低下とともに増加する)。
【0056】
可動マス3と支持体2との結合が実現する前に、可動マス3は、当該可動マスの行程を支持体2の方向と逆の方向に、当該支持体の運動エネルギーの影響を受けながら継続する。可動マス3の切り欠き部が、これらの溝付き表面の1ピッチの半分を移動する場合、これは、キャパシタに蓄えられる電荷が、結合を実現するためには十分ではないことを意味する。この中間位置では、容量が最小値Cminを有するのに対し、電気回路の両端に現われる電圧は最大値Vmaxを有する。次に、スイッチ52を一時的に閉じて、キャパシタに蓄積されているエネルギーを、変圧器54の磁気回路に向けて1次コイルを介して放出する。次に、スイッチ53を一時的に閉じて、磁気回路に蓄積されるエネルギーを、バッテリに変圧器54の2次コイルを介して伝達する。キャパシタへの電荷の注入は、最大容量になるまで行なわれるので、すなわちエネルギーが1/2Q2/Cmaxに等しくなるまで行なわれるので、このエネルギーの取り出しは、最小容量になるまで行なわれる、すなわち、エネルギーが1/2Q2/Cminに等しい値に戻るまで行なわれるので、1/2Q2(1/Cmin−1/Cmax)の余剰エネルギーが生成されている。
【0057】
従って、可動マス3は、その運動エネルギーのほんの一部を失う。その結果、これらの溝付き表面の切り欠き部が、再び互いに対向すると、スイッチ53を、そして次に、スイッチ52を、一時的に閉じて、可動マス3の結合、及び支持体2の結合を実現する。
【0058】
可動マス3及び支持体2が結合し、それに応じて、同じ方向に変位すると、スイッチ52を再び、一時的に閉じて、キャパシタに保持される電荷を空にし、次に、スイッチ52を開いたままにして、可動マス3が支持体2から結合解除されている状態を維持する。次に、スイッチ53を一時的に閉じて、キャパシタから放出され、かつスイッチ52を閉じている間に、変圧器54の磁気回路に一時的に蓄積されていた電荷を、バッテリ55に移動する。
【0059】
従って、制御回路51によって、結合/結合解除、及び可動マス3の運動により生成されるエネルギーの取り出しの両方が可能になる。
【0060】
十分短いピッチを有する溝付き表面を使用することにより、可動マス3と支持体2との結合を、可動マス3の全行程に亘って実現することができる。
【0061】
図9aは、増幅素子11の別の実施形態の模式図である。可動マス3は、包囲体7に対して変位方向に摺動するように取り付けられている。互いに対向するように配置されている二重圧電薄板群75は、一方の端部を介して包囲体7に埋め込まれ、可動マス3の変位と直交する方向に、かなりの距離に亘って延在している。これらの二重薄板75は、適切な電圧を、これらの二重薄板に印加することにより、これらの二重薄板の自由端で、可動マス3を把持し、そして包囲体7と可動マス3との結合を確実にするまで、可動マス3の方に向かって延伸するように制御される。これらの二重薄板が細長い構造であることによって、そしてこれらの二重薄板の配置が、可動マス3の運動と直交することによって、包囲体7と可動マス3との相対運動が行なわれるとした場合に、これらの二重薄板に、撓みが結合時に生じる。
【0062】
図9b〜図9eは、異なるフェーズ中の増幅素子11の作用を示している。図9bでは、可動マスが下方に変位するのに対し、包囲体7は上方に変位する。これらの反対方向の変位が生じている間に、これらの二重薄板75の延伸が始まる。次に、これらの二重薄板75によって、包囲体7と可動マス3との結合が実現する。可動マス3の下方移動は、一時的に継続して、これらの二重薄板75に曲げが生じる。これらの二重薄板75の撓みが最大になる(図9c)と、可動マス3は、最終的に、包囲体7に対してゼロの相対速度を持つ。図9dでは、可動マス3は、包囲体7の運動の影響、及びこれらの二重薄板75のバネ作用による戻し力の影響を受けて、包囲体7と同じ方向に沿って変位する。図9eでは、これらの二重薄板75は、可動マス3との結合を解除し始める。
【0063】
これらの二重圧電薄板75の使用によって、大きな結合力を可動マス3に作用させることができるので、有利であることが判明している。更に、これらの二重圧電薄板によって、これらの二重圧電薄板が適切なサイズになるとバネを形成することができ、圧電材料の構造的な減衰が小さいので、高い品質係数を得ることができる。更に、適切な制御系を適用することにより、これらの二重薄板が撓んでいるときのこれらの二重薄板の電圧差を大きくして、これらの二重薄板75に蓄えられるエネルギー(圧電材料内で機械的変形が電圧に変換される)を取り出し、可動マス3の運動エネルギーを電気エネルギーに変換することができる。これらの圧電材料は、これらの圧電材料を膨張または収縮させる結果として圧電材料に電荷を生じさせることができる。これらの圧電材料の機械/電気変換効率は、これらの圧電材料に加わる変形が迅速に進行するときに、一層高くなる。
【0064】
図10は、二重圧電薄板、及び二重圧電薄板に指示信号を出力するように設計されている回路の第1の実施形態を、模式的に示している。回路77は、電圧源Eと、スイッチKc及びKdと、電位V1及びV2を薄板751及び752にそれぞれ印加する端子群とを備えている。二重薄板75の延伸は、スイッチKcを閉じることにより、かつスイッチKdを開くことにより実現する。二重薄板75の収縮は、スイッチKcを開くことにより、かつスイッチKdを閉じることにより実現する。
【0065】
図11は、二重圧電薄板75を制御するように設計されている回路の第2の実施形態における二重圧電薄板75の模式図である。回路78によって、更に、二重薄板75に蓄えられる電気エネルギーを、電圧源Eに供給することができる。
【0066】
一時的にKpを閉じ、次に、K1及びK2を閉じることにより、エネルギーを電圧源Eから薄板751及び752に供給することができる。一時的にK1及びK2を閉じ、次に、Kpを閉じることにより、エネルギーを、これらの薄板から電圧源Eに供給することができる。
【0067】
結合を確実にするために、エネルギーを、電圧源Eから、これらの薄板に供給する。図9cに示すこれらの二重薄板75が、結合の後に撓むことによって、薄板751は、かつ第2薄板752が収縮するようになるので、電位V1が増加し、かつ電位V2が減少するようになる。撓みが最大になると、一時的にK1を閉じ、次に、Kpを閉じることにより、圧電薄板751(この圧電薄板の電圧は、当該圧電薄板が延伸しているときに増加している)に蓄えられる電荷の一部が、電圧源Eに移動する。同時に、電荷は、電圧源Eから第2薄板752に移動し、第2薄板752の電圧は、第2薄板752が収縮しているときに減少する。薄板751に収集される電荷が作る電位は、薄板752に移動する電荷が作る電位よりも高いので、収集される電荷、及び移動する電荷が同じである場合、電圧源Eは、当該電圧源Eが供給するエネルギーよりも大きいエネルギーを収集するので、当該電圧源Eのエネルギーは増加する(利得=1/2QΔV)。2枚の薄板751及び752が、伸縮方向が反対になるように変形することにより、電圧差がこれらの薄板の間に発生し、この電位差をゼロにすることにより、所謂電圧差エネルギーが取り出される。
【0068】
最後に、二重薄板75が撓みゼロ位置に(図9d〜図9e)戻ると、これらの2枚の薄板751及び752の各々に蓄えられるエネルギーは、電圧源Eに、一時的にK1を、そして次にKpを、そしてK2を、そして次に、Kpを閉じることにより供給される。次に、二重薄板75の延伸を生じるために最初に消費されるエネルギーであって、二重薄板75が撓みゼロ位置に戻っているときに再び生成される差エネルギーによって補充されるエネルギーは、電圧源Eに再び蓄えられる。磁気回路からの、または磁気回路へのエネルギー供給時間、従ってスイッチK1、K2、及びKpの閉鎖時間は、機械運動(数ミリ秒)または結合期間(数百μ秒)と比べると、非常に短い(数μ秒)。
【0069】
図12aは、増幅素子11の別の実施形態を模式的に示している。互いに対向するように配置される圧電薄板群76は、一方の端部を介して包囲体7に埋め込まれ、可動マス3が変位しているときの方向に直交する方向に対してわずかに傾斜する方向に延在する。これらの薄板76は、適切な電圧を、これらの薄板76に印加することにより、これらの薄板76が可動マス3の方に向かって、これらの薄板の自由端で当該マスを把持し、そして包囲体7と可動マス3との結合を確実にするまで延伸するように制御される。
【0070】
これらの薄板76は、可動マス3が下降するときに、可動マス3の結合を実現するように設計されている。不図示の他の薄板群は、逆の姿勢になることにより、可動マス3が上昇するときに、その結合を実現する。
【0071】
図12b〜図12eは、異なるフェーズ中の素子11の作用を示している。図12bでは、可動マス3が下方に変位するのに対し、包囲体7は上方に変位する。これらの反対方向の変位が生じている間、これらの薄板76の延伸が始まる。次に、これらの薄板76によって、包囲体7と可動マス3との結合が実現する。図12cでは、可動マス3の下方運動が一時的に継続すると、可動マス3の変位方向に対して、これらの薄板がわずかに傾斜しているので、これらの薄板76の圧縮が生じる。可動マス3は最終的に、包囲体7に対する速度がゼロになる。圧縮が生じるので、これらの薄板76によって、戻しバネ作用が働く。図12dでは、可動マス3は、包囲体7の運動の影響、及びこれらの薄板76の戻しバネ作用の影響を受けながら、包囲体7と同じ方向に変位する。図12eでは、これらの薄板76は、包囲体7の変位方向が切り替わる前に、可動マス3との結合を解除するように制御される。
【0072】
これらの薄板76に対して適切な指示をすることにより、これらの薄板76が結合時に圧縮されている間に蓄えられている電気エネルギーを取り出すことができる。
【0073】
図13は、増幅素子11の別の実施形態を示している。この素子11は、シリコン基板をエッチングし、そして加工するという実施形態に特に適していることが判明している。可動マス3は、そのうちの2つの面を介して、弾性膜31及び33に固く連結されている。これらの膜31及び33は、可動マス3の戻しバネを形成し、そして更に、可動マス3を、これらの膜の平面に直交する方向に沿って並進移動するように案内する。これらの弾性膜は、例えばポリイミドとすることができる。これらの弾性膜31及び33は、中間部分にエッチング形成されるシリコン層34及び35を挟んで離間させることにより、可動マス3を収容する。層34及び35は、膜31及び33にそれぞれ固く連結される。シリコンにより形成される中空部36は、膜33の下に固定される振動支持体に固く連結される。窪みを基台36の中央部分にエッチング形成して、可動マス3の遊びを可能にしている。付加マス13が、膜31の上側部分に固定される。この付加マス13を金属(例えば、タングステン)により形成して、共振系の質量を運動中に大きくすることができる。増幅素子11は、シリコン層34と35との間に配置された複数層32の積層体を有している。複数層32の積層体を適切な形状に形成して、二重圧電薄板を可動マス3の両側に形成する。適切な指示を出して、これらの二重薄板を、これらの二重薄板で可動マス3を基台36に結合させるまで延伸させる。これらの二重薄板は、可動マス3の運動エネルギーを電気エネルギーに変換するために使用することもできる。
【0074】
図14の例では、可動マス3、包囲体7、及び補助バネ8a及び8bは、単体ユニットとして形成されている。単体ユニット素子は、例えば金型成形することにより、またはシリコン層をエッチングすることにより形成することができる。この例では、補助バネ8a及び8bは、最初に可動マス3に埋め込まれ、次に、包囲体7に埋め込まれる弾性支柱により形成されている。これらの支柱は、可動マス3の変位方向と直交している。可動マス3は、共振系の質量を大きくするように設計された付加部材13を備えている。この付加マス13は、可動マス3のシリコン部分に接着することができる。2つの二重薄板12は、一方の端部を介して包囲体7に埋め込まれ、可動マス3の変位方向と直交して延在している。これらの二重薄板12は、可動マス3の両側に配置することにより、これらの二重薄板12から可動マス3に加わる力が打ち消されるようになっている。これらの二重薄板の他方の端部は、可動マス3と選択的に接触することにより、可動マスを包囲体7に結合させるように設計されている。これまでの例におけるように、包囲体7と可動マス3との結合は、これらの包囲体及び可動マスの変位方向が反対になるときに行なわれる。結合解除は、包囲体の変位方向、及び可動マス3の変位方向が一致するときに、好ましくは、包囲体7が、その最大速度に達するときに行なわれる。結合及び結合解除は、電子的に指示される。結合は、電圧を、これらの二重薄板12に印加して、これらの二重薄板を、可動マス3と接触するようになるまで延伸させることにより行なうことができる。包囲体7と可動マス3との結合が行なわれている間に、これらの二重薄板12は、バネとして作用して、可動マス3の運動エネルギーの影響を受けながら曲がることができる。このような二重薄板12が曲がっている間に、これらの圧電素子に電気エネルギーを蓄える。従って、これらの二重薄板12を適切な回路に選択的に接続することにより、可動マス3の運動エネルギーを電気エネルギーに変換することができる。
【0075】
図15は、増幅素子11の別の変形例を示している。この例では、可動マス3、包囲体7、戻しバネ4、及び補助バネ8a及び8bは、一体型単体ユニットとして形成されている。この単体部材を、シリコン層をエッチングすることにより形成すると有利である。この例では、補助バネ8a及び8bは、最初に可動マス3に埋め込まれ、次に包囲体7に埋め込まれる弾性支柱により形成されている。これらの支柱は、可動マス3の変位方向と直交して延在している。戻しバネ4は、両方の端部で包囲体7に埋め込まれて、可動マス3の変位方向と直交して延在する支柱の形態に形成される。戻しバネ4の剛性は、補助バネ8a及び8bの剛性よりもずっと大きい。可動マス3は、共振系の質量を大きくするように設計されている付加部材13を有する。突出部14は、戻しバネ4の支柱の中央部分に埋め込まれ、可動マス3の変位方向に延在している。結合部材は、包囲体7に固く連結される顎部15を有している。この顎部15は、突出部14を包囲体7に選択的に結合させる。
【0076】
これまでの例におけるように、包囲体7と可動マス3との結合は、これらの変位方向が反対になるときに行なわれる。結合解除は、可動マス3の変位方向、及び包囲体7の変位方向が一致しようとして、可動マス3の方向が切り替わっている最中に行なわれる。結合及び結合解除は、電子的に指示される。
【0077】
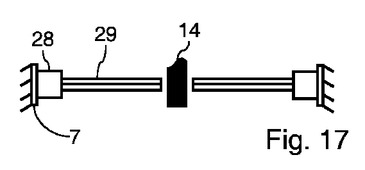
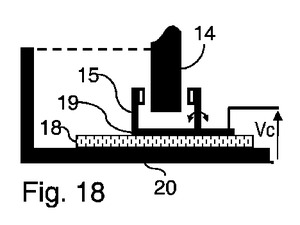
図15〜図20は、可動マス3と包囲体との結合部材の異なる実施形態を示している。これらの例では、結合部材は、可動マス3に固く連結されている突出部14を把持していが、この結合は、可動マス3に固く連結されている別の部材に対して行なうことができる。
【0078】
図16は、高い熱膨張率を有する把持部材17を備える顎部15を示している。加熱抵抗体16を、これらの把持部材17の内部に埋め込む。包囲体7を突出部14と結合させることが望ましい場合、制御電圧を、加熱抵抗体16の両端に印加する。その後すぐに、把持部材17で突出部14を把持し、動かないようにするまで膨張させる。把持部材17を、形状記憶材料により形成することもできる。顎部15は、シリコン支持体上に比較的容易に形成される。これらの顎部を作動させるためには、極めて小さいエネルギー、及び非常に低い電源電圧を用いて膨張させて、突出部14を把持するだけでよい。
【0079】
しかしながら、このような顎部15によって、電気エネルギーへの運動エネルギーの変換を達成することはできない。従って、図17の変形例では、高熱膨張率部材群28を二重圧電薄板29と組み合わせてある。これらの部材28は、包囲体7に埋め込まれ、これらの部材28の膨張は、電気抵抗体により制御される。これらの二重薄板29は、一方の端部を介して、部材28に埋め込まれている。これらの部材28が膨張している間、二重圧電薄板29の自由端は、突出部14と接触するようになって結合する。これまで詳細に説明してきた原理により、これらの二重薄板29が可動マス3の運動エネルギーによって結合時に変形している間に蓄えられる電気エネルギーは、電気回路によって取り出すことができる。
【0080】
図18は、別の構成の結合部材を表わしている。この実施形態では、導電部材20が枠部材に固く連結されている。顎部15は、導電ソケット19として形成されている。これらの顎部は、突出部14の両側に配置されている。突出部14は、それ自体が導電性であり、導電部材20に接続されている。導電ソケット19は、導電部材20から絶縁層18を挟んで分離されている。電圧差が導電ソケット19と導電部材20との間に生じると、静電気力が作用するため、これらの顎部15が撓み、突出部14に圧接する。
【0081】
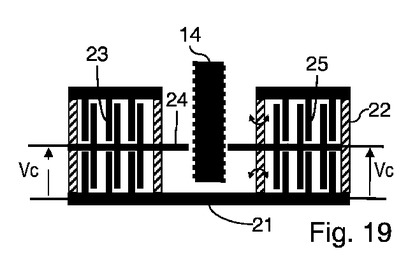
図19は、結合部材の別の変形例を示している。この変形例では、結合部材は導電部材21を備えている。この部材21は、振動支持体に固く連結されている。この部材21は、導電プレート25に固く連結され、かつ接続されている。導電プレート23は、導電プレート25に対向するように配置されている。これらの導電プレート23は、その中央部分で、係止ロッド24と交差している。これらのロッド24は、導電部材21に対して、可撓性絶縁壁22を介して並進移動するように取り付けられている。これらの絶縁壁22が撓むと、突出部14の変位方向と直交する方向の並進変位が可能となる。電圧差が導電プレート23とプレート25との間に印加されると、静電気によって、導電プレート23は導電プレート25に対して変位する。次に、係止ロッド24は、隆起部群により画定され、かつ突出部14に形成された切り欠き部に係止するまで変位する。その後すぐに、係止ロッド24は、突出部14に結合される。突出部14の両側に形成されるこれらの切り欠き部は、この突出部14の変位方向に沿ってずれている。従って、これらの切り欠き部の分解能は、係止ロッド24を切り欠き部に、反対側の係止ロッド24が、隆起部に当接する場合に挿入することができるので高くなる。また、突出部14に沿った結合部材群の数、または他の突出部に設けられる結合部材群の数を大幅に増やすことができる。各部材の位置を、これらの切り欠き部に対して異なる態様で変えることにより、機能構造のこれらの係止ロッド24のうちの少なくとも1つの係止ロッド24が、切り欠き部に結合指示時にぴったり収まる確率が高くなる。係止ロッド24の端部を細くして、これらの切り欠き部へのこれらの係止ロッドの挿入を容易にすることもできる。
【0082】
可撓性絶縁壁22を、電気絶縁体ではなく、導電性とすることもできる。これらの絶縁壁22、及び導電プレート25は、絶縁支持体に固定されている。従って、絶縁壁22、及び導電プレート25は、この支持体によって電気的に絶縁される。
【0083】
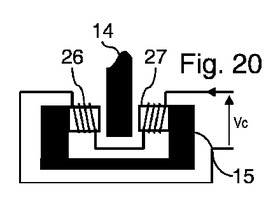
図20は、結合部材の更に別の例を示す。この変形例では、顎部15に、磁歪材料により形成された把持部材27を設けてある。これらの把持部材27は、コイル26で取り囲まれている。電圧差が、コイル26の両端に印加されると、把持部材27は膨張し、突出部14を把持して、動かないようにする。
【0084】
これらの結合素子の各々に関して、前記アクチュエータまたはアクチュエータ群と可動部分との間隔を短くして(例えば、数μmの間隔)、アクチュエータの行程を小とし、従って結合を行わせるために必要なエネルギーを小さくすると有利である。
【0085】
それに加えて、支持体に、または増幅素子を固定する支持体のインターフェース部に加速度計を設けると、この加速度計が、発生する加速度の振幅を測定するので有利である。支持体の振動エネルギーが、十分なエネルギーを可動部材に伝えるためには不十分である場合、結合部材の作用を停止させて、この素子が、それが生成するよりも大きい電気エネルギーを消費することがないようにする。
【0086】
本明細書において記載した実施形態は、可動マスの並進運動を利用しているが、本発明は、可動マスの回転運動または回転成分を利用する機械的な増幅素子に適用することもできる。
【符号の説明】
【0087】
1,10 共振系
2 支持体
3 可動マス
4,4a,4b 戻しバネ
5 着座部
6,6a,6b 結合部材
7 包囲体
8,8a,8b 補助バネ
9,9a,9b ロッド
10 共振系
11 増幅素子
12 二重導板
13 付加部材
14 突出部
15 顎部
16 加熱抵抗体
17 把持部材
18 絶縁層
19 導電ソケット
20,21 導電部材
22 可撓性絶縁壁
23,25 導電プレート
24 係止ロッド
26 コイル
27 把持部材
28 高膨張率部材
29,75 二重圧電薄板
31,33 弾性膜
32 複数層
34,35 シリコン層
36 中空部、基台
51 制御素子
52,53 スイッチ
54 変圧器
55 バッテリ
61 釣合い重り
62 案内ロッド
63 係止タブ
71 収納部
72 突起
74 パッド
76 圧電薄板
77 回路
91 切り欠き部
92 隆起部
751,752 薄板
752 第2薄板
c 係止位置
Cmax 容量最大値
Cmin 容量最小値
d 平衡位置
E 電圧源
f 支持体の振動周波数
fr マス及びバネの共振周波数
fr1 第1共振周波数
fr2 第2共振周波数
k1,k2 剛性
Kc,Kd,Kp スイッチ
m マスの質量
V1,V2 電位
Vm0 マスの初期速度
Vmax 電圧最大値
Vmin 最小電圧
ΔV 可動マスの利得及び速度の絶対値
z 支持体の位置
【特許請求の範囲】
【請求項1】
振動運動を増幅するマイクロメカニカル素子(11)であって:
−前記素子を振動部材に固く連結するインターフェース部(7)と;
−前記インターフェース部に対して、少なくとも1自由度で移動可能に取り付けられる可動マス(3)と;
−戻し力を前記可動マスと前記インターフェース部との間に加えることができるバネ(4)とを備え、前記マイクロメカニカル素子は、更に:
−前記インターフェース部が前記自由度で変位する方向を検出する部材と;
−前記可動マスを前記インターフェース部に結合させる部材(6)であって、前記可動マス(3)を前記インターフェース部(7)に、前記インターフェース部の変位方向が、前記可動マスの変位方向と反対になるときに結合させるように構成され、かつ前記可動マスを、前記インターフェース部から、その方向が切り替わる前に、かつ前記インターフェース部の前記変位方向が、前記可動マスの変位方向と一致するときに、結合解除するように構成されている部材(6)
とを備えることを特徴とする、マイクロメカニカル素子(11)。
【請求項2】
前記インターフェース部(7)の最大速度を検出する部材を備え、前記結合部材(6)は、前記可動マス(3)を前記インターフェース部(7)に、前記インターフェース部が、該インターフェース部(7)の最大速度に達するときに結合させるように構成されている、請求項1に記載の素子(11)。
【請求項3】
前記変位方向を検出する前記部材、及び/又は前記最大速度を検出する前記部材は、加速度計を含み、前記結合部材は、電気制御アクチュエータを含み、前記素子は、更に、前記アクチュエータを、前記加速度計からの測定値に応じて制御する処理装置を備える、請求項2に記載の素子(11)。
【請求項4】
前記最大速度は、加速度がゼロ値を横切るときの加速度の増加の関数として、または減少の関数として検出されるようになっている、請求項3に記載の素子(11)。
【請求項5】
前記可動マス(3)は、前記インターフェース部(7)に対して並進移動することができ、前記結合部材は、前記可動マス(3)の並進軸に直交する軸の回りを不平衡状態で回転するように取り付けられた釣合い重り(61)を含み、この釣合い重り(61)は、前記可動マス(3)が前記インターフェース部(7)に結合されて、前記可動マス(3)が、前記インターフェース部(7)に対して、それぞれの方向に変位する2つの位置の間で回転するように取り付けられている、請求項1又は2に記載の素子(11)。
【請求項6】
前記インターフェース部(7)及び前記可動マス(3)に、互いに対向する複数の溝付き導電性表面を設けてキャパシタを形成し、前記素子は、電圧をこれらの溝付き表面の間に選択的に印加して、前記インターフェース部及び前記可動マスを、結合させるか、または結合解除する制御回路(51)を備えている、請求項1〜3のいずれか1項に記載の素子。
【請求項7】
前記制御回路(51)は、形成される前記キャパシタに保持される電荷を選択的に放電させ、かつ蓄えるように構成されている、請求項6に記載の素子。
【請求項8】
前記可動マス(3)は、前記インターフェース部に対して並進移動することができ、前記結合部材は、圧電素子(75)を含み、この圧電素子(75)を制御して、前記可動マス(3)の前記変位方向と直交する方向に延伸させることにより、前記可動マス(3)を、前記インターフェース部(7)に結合させるようになっている、請求項1〜3のいずれか1項に記載の素子。
【請求項9】
前記圧電素子(75)は、前記可動マス(3)の変位方向と直交する方向に延出し、撓むことにより、前記バネ(4)を結合時に形成するようになっている、請求項8に記載の素子。
【請求項10】
前記インターフェース部(7)、可動マス(3)、及び前記バネ(4)は、シリコン基板に単体ユニットとして形成された共通部材を構成している、請求項1〜9のいずれか1項に記載の素子(11)。
【請求項11】
前記可動マス(3)は、前記単体部材に固定される付加部材を含む、請求項10に記載の素子。
【請求項12】
前記戻しバネ(4)は、前記単体部材内に形成される弾性支柱により形成されている、請求項10又は11に記載の素子。
【請求項13】
前記可動マス(3)は、切り欠き部群及び隆起部群を交互に設けた結合部分(14)を有し、前記結合部材は、前記結合部分の切り欠き部に結合中に挿入されるアクチュエータ(24)を含む、請求項1〜12のいずれか1項に記載の素子。
【請求項14】
前記可動マスの機械エネルギーを電気エネルギーに変換する部材を備える、請求項1〜13のいずれか1項に記載の素子(11)。
【請求項15】
請求項1〜14のいずれかに記載のマイクロメカニカル増幅素子と、該マイクロメカニカル素子の前記インターフェース部に固く連結される振動支持体(2)とを備えるシステムであって、前記振動部材は、前記マイクロメカニカル素子の質量よりも、少なくとも50倍大きい質量を有するシステム。
【請求項16】
振動部材(2)の運動をメカニカル素子により増幅する方法であって:
−前記振動部材に対して、少なくとも1自由度で移動することができるマス(3)を取り付け、かつ戻し力を前記可動マスと前記振動部材との間に加えることができるバネ(4)を設けたマイクロメカニカル素子を提供するステップと、
−前記インターフェース部が、前記自由度で変位する方向を検出するステップと、
−前記可動マスを前記振動部材に、前記インターフェース部の変位方向が、前記可動マスの変位方向と反対になるときに結合させ、そして前記可動マスを、前記インターフェース部から、前記振動部材の方向が切り替わる前に、かつ前記インターフェース部の変位方向が、前記可動マスの変位方向と一致するときに結合解除するステップ
とを含む方法。
【請求項1】
振動運動を増幅するマイクロメカニカル素子(11)であって:
−前記素子を振動部材に固く連結するインターフェース部(7)と;
−前記インターフェース部に対して、少なくとも1自由度で移動可能に取り付けられる可動マス(3)と;
−戻し力を前記可動マスと前記インターフェース部との間に加えることができるバネ(4)とを備え、前記マイクロメカニカル素子は、更に:
−前記インターフェース部が前記自由度で変位する方向を検出する部材と;
−前記可動マスを前記インターフェース部に結合させる部材(6)であって、前記可動マス(3)を前記インターフェース部(7)に、前記インターフェース部の変位方向が、前記可動マスの変位方向と反対になるときに結合させるように構成され、かつ前記可動マスを、前記インターフェース部から、その方向が切り替わる前に、かつ前記インターフェース部の前記変位方向が、前記可動マスの変位方向と一致するときに、結合解除するように構成されている部材(6)
とを備えることを特徴とする、マイクロメカニカル素子(11)。
【請求項2】
前記インターフェース部(7)の最大速度を検出する部材を備え、前記結合部材(6)は、前記可動マス(3)を前記インターフェース部(7)に、前記インターフェース部が、該インターフェース部(7)の最大速度に達するときに結合させるように構成されている、請求項1に記載の素子(11)。
【請求項3】
前記変位方向を検出する前記部材、及び/又は前記最大速度を検出する前記部材は、加速度計を含み、前記結合部材は、電気制御アクチュエータを含み、前記素子は、更に、前記アクチュエータを、前記加速度計からの測定値に応じて制御する処理装置を備える、請求項2に記載の素子(11)。
【請求項4】
前記最大速度は、加速度がゼロ値を横切るときの加速度の増加の関数として、または減少の関数として検出されるようになっている、請求項3に記載の素子(11)。
【請求項5】
前記可動マス(3)は、前記インターフェース部(7)に対して並進移動することができ、前記結合部材は、前記可動マス(3)の並進軸に直交する軸の回りを不平衡状態で回転するように取り付けられた釣合い重り(61)を含み、この釣合い重り(61)は、前記可動マス(3)が前記インターフェース部(7)に結合されて、前記可動マス(3)が、前記インターフェース部(7)に対して、それぞれの方向に変位する2つの位置の間で回転するように取り付けられている、請求項1又は2に記載の素子(11)。
【請求項6】
前記インターフェース部(7)及び前記可動マス(3)に、互いに対向する複数の溝付き導電性表面を設けてキャパシタを形成し、前記素子は、電圧をこれらの溝付き表面の間に選択的に印加して、前記インターフェース部及び前記可動マスを、結合させるか、または結合解除する制御回路(51)を備えている、請求項1〜3のいずれか1項に記載の素子。
【請求項7】
前記制御回路(51)は、形成される前記キャパシタに保持される電荷を選択的に放電させ、かつ蓄えるように構成されている、請求項6に記載の素子。
【請求項8】
前記可動マス(3)は、前記インターフェース部に対して並進移動することができ、前記結合部材は、圧電素子(75)を含み、この圧電素子(75)を制御して、前記可動マス(3)の前記変位方向と直交する方向に延伸させることにより、前記可動マス(3)を、前記インターフェース部(7)に結合させるようになっている、請求項1〜3のいずれか1項に記載の素子。
【請求項9】
前記圧電素子(75)は、前記可動マス(3)の変位方向と直交する方向に延出し、撓むことにより、前記バネ(4)を結合時に形成するようになっている、請求項8に記載の素子。
【請求項10】
前記インターフェース部(7)、可動マス(3)、及び前記バネ(4)は、シリコン基板に単体ユニットとして形成された共通部材を構成している、請求項1〜9のいずれか1項に記載の素子(11)。
【請求項11】
前記可動マス(3)は、前記単体部材に固定される付加部材を含む、請求項10に記載の素子。
【請求項12】
前記戻しバネ(4)は、前記単体部材内に形成される弾性支柱により形成されている、請求項10又は11に記載の素子。
【請求項13】
前記可動マス(3)は、切り欠き部群及び隆起部群を交互に設けた結合部分(14)を有し、前記結合部材は、前記結合部分の切り欠き部に結合中に挿入されるアクチュエータ(24)を含む、請求項1〜12のいずれか1項に記載の素子。
【請求項14】
前記可動マスの機械エネルギーを電気エネルギーに変換する部材を備える、請求項1〜13のいずれか1項に記載の素子(11)。
【請求項15】
請求項1〜14のいずれかに記載のマイクロメカニカル増幅素子と、該マイクロメカニカル素子の前記インターフェース部に固く連結される振動支持体(2)とを備えるシステムであって、前記振動部材は、前記マイクロメカニカル素子の質量よりも、少なくとも50倍大きい質量を有するシステム。
【請求項16】
振動部材(2)の運動をメカニカル素子により増幅する方法であって:
−前記振動部材に対して、少なくとも1自由度で移動することができるマス(3)を取り付け、かつ戻し力を前記可動マスと前記振動部材との間に加えることができるバネ(4)を設けたマイクロメカニカル素子を提供するステップと、
−前記インターフェース部が、前記自由度で変位する方向を検出するステップと、
−前記可動マスを前記振動部材に、前記インターフェース部の変位方向が、前記可動マスの変位方向と反対になるときに結合させ、そして前記可動マスを、前記インターフェース部から、前記振動部材の方向が切り替わる前に、かつ前記インターフェース部の変位方向が、前記可動マスの変位方向と一致するときに結合解除するステップ
とを含む方法。
【図1】

【図2】
【図3】
【図4】
【図5a】
【図5b】
【図5c】
【図5d】
【図6】
【図7】
【図8】
【図9a】
【図9b】
【図9c】
【図9d】
【図9e】
【図10】
【図11】
【図12a】
【図12b】
【図12c】
【図12d】
【図12e】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5a】
【図5b】
【図5c】
【図5d】
【図6】
【図7】
【図8】
【図9a】
【図9b】
【図9c】
【図9d】
【図9e】
【図10】
【図11】
【図12a】
【図12b】
【図12c】
【図12d】
【図12e】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公表番号】特表2012−531180(P2012−531180A)
【公表日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願番号】特願2012−516630(P2012−516630)
【出願日】平成22年6月10日(2010.6.10)
【国際出願番号】PCT/EP2010/058185
【国際公開番号】WO2010/149503
【国際公開日】平成22年12月29日(2010.12.29)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【公表日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願日】平成22年6月10日(2010.6.10)
【国際出願番号】PCT/EP2010/058185
【国際公開番号】WO2010/149503
【国際公開日】平成22年12月29日(2010.12.29)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
[ Back to top ]