
捨石投入作業支援装置及び捨石投入シミュレーション作業支援装置
【課題】捨石の投入直後の海水底の堆積形状(マウンド形状)をコンピュータ画面上で予測できるので、次ぎに投入する投入位置及び投入量を的確に判断でき、しかもコンピュータ画面上で投入位置に捨石投入用のグラブを誘導でき、目的とする堆積形状(マウンド形状)を海水底に効率よく形成するのを可能にする。
【解決手段】船位検出センサー11と、グラブ捨石投入位置検出センサー12と、グラブ捨石投入時検出センサー13と、コンピュータ14に組み込まれて海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段15と、当該海水底堆積捨石マウンド形状を表示する表示器16とからなる。
【解決手段】船位検出センサー11と、グラブ捨石投入位置検出センサー12と、グラブ捨石投入時検出センサー13と、コンピュータ14に組み込まれて海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段15と、当該海水底堆積捨石マウンド形状を表示する表示器16とからなる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、作業船のクレーン先端等にGPS(Global Positioning System)アンテナを設け、捨石投入用のグラブ位置誘導を行うほか、グラブ誘導位置における捨石の投入量に基づいて海水底地盤上に形成される捨石マウンドの予測形状をリアルタイムに自動表示することにより、視覚的な出来形予測が可能な捨石投入作業支援装置及び捨石投入シミュレーション作業支援装置に関するものである。
【背景技術】
【0002】
従来、港湾建設における防波堤築造工事においては、防波堤ケーソンの据付けに先行して、ケーソンの基礎となる捨石マウンドを海底に築造することとなるが、この基礎捨石マウンド築造における捨石の投入においては作業船の舷側より測量担当者がレッド等を用いた海底地形の測量を頻繁に行い、頭の中にマウンドの出来形をイメージしながら、捨石投入位置と捨石投入量とを作業船グラブ運転者に指示して、計画のマウンドを海底に形成していた。このように、従来の捨石投入作業は投入指示者やグラブ運転者の経験と技術によって行われていた。
【発明の開示】
【発明が解決しようとする課題】
【0003】
防波堤築造に際して行う従来の捨石投入作業においては、投入位置を明示するために区画周辺に目印のボンデン旗を投入設置していたが、流失し易いために何度も設置しなければならないとともに、測量に多大な手間を要した。捨石の投入前後では、海底の捨石山の高さ(水深)を確認する必要があり、レッドを用いて作業船の舷側で測深作業を行ってきたが、水深が深い場合には潮流等でレッドが流され測定が難しく水深を読み間違う場合や、レッドが石に挟まり測定出来ない場合等があった。また、作業船上でのレッド測量は、レッドが重いことや作業船が横傾斜するため苦痛であり、かつ係留索が外れた場合の危険性もはらんでいた。さらに捨石状況はレッド作業担当者のみの頭の中で出来形状況を想像して判断するため、他の共同作業者への視覚的な説明が難しくまた投入区域全体の出来形形状の把握が難しかった。
このように、従来の従来の捨石投入作業においては、次のような課題があった。
(1)現状の海底地盤の状況と捨石投入後の形状の把握は、レッド作業者しか解らない。
(2)投入指示者と投入者が異なる。
(3)現状の海底地盤の状況と捨石投入後の形状の視覚化ができない。
(4)投入施工位置は既設構造物との見透し対比や、投入旗を基準とするため投入位置精度の確保が難しい。
(5)施工能力が小規模であり、急速施工に難がある。
(6)工期短縮、工費縮減が難しい。
(7)作業船の舷側作業のため、安全性に難がある。
(8)重いレットを使用した手作業のため、苦渋作業である。
(9)旗入れ作業等、余分な作業をともなう。
(10)潮流が早い場合にはレッドが流されるため、正確な測深ができず投入位置精度が劣る。
(11)投入位置、投入量、投入形状が記録できないため、作業の管理に手間取る。
(12)過去の作業位置への回帰性が悪い。
(13)水中作業の近代化が図れない。
【0004】
この発明は、上記のような課題に鑑み、その課題を解決すべく創案されたものであって、その目的とするところは、捨石の投入直後の海水底の堆積形状(マウンド形状)をコンピュータ画面上で予測できるので、次ぎに投入する投入位置及び投入量を的確に判断でき、しかもコンピュータ画面上で投入位置に捨石投入用のグラブを誘導でき、目的とする堆積形状(マウンド形状)を海水底に効率よく形成するのを可能にする捨石投入作業支援装置及び捨石投入シミュレーション作業支援装置を提供することにある。
【課題を解決するための手段】
【0005】
以上の目的を達成するために、請求項1の捨石投入作業支援装置に係る発明は、作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入作業において、捨石投入位置のグラブ位置をGPS測位で求めるグラブ捨石投入位置検出センサーと、グラブからの捨石投入時を検出するグラブ捨石投入時検出センサーと、当該グラブ捨石投入時検出センサーからの投入時情報に基づいてグラブによる捨石投入毎に捨石投入条件からガウス分布に基づき捨石マウンドの形状を演算し上記グラブ捨石投入位置検出センサーからのグラブ位置情報と入力された海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段で求められた海水底堆積捨石マウンド形状などを表示する表示器と、を備えた手段よりなるものである。
【0006】
また、請求項4の捨石投入シミュレーション作業支援装置に係る発明は、作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入シミュレーション作業において、捨石投入条件及び入力された投入回数からガウス分布に基づき捨石マウンドの形状を演算しグラブ位置情報と海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状のシミュレーションをする海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段でシミュレーションした海水底堆積捨石マウンド形状を表示する表示器と、を備えた手段よりなるものである。
【発明の効果】
【0007】
以上の記載より明らかなように、この発明に係る捨石投入作業支援装置によれば、次のような効果を奏する。
(1)海底地盤の状況と捨石投入後の形状が視覚化されるため、誰もが状況情報を共有できる(効率向上)。
(2)投入指示者によらず画面を見て、投入者自身で投入できる(効率向上)。
(3)投入施工位置はGPS支援によるため、位置精度が向上する〈精度向上)。
(4)画面を見ながら投入者自身で投入できるため、施工能力が向上し、急速施工が可能となる(効率向上)。
(5)工期短縮、工費縮減に対応できる(効率向上)。
(6)投入作業は遠隔作業となり、安全性が向上する。また、苦渋作業が解消する(安全・環境性向上)。
(7)旗入れ作業等、余分な作業がともなわない(効率向上)。
(8)潮流が早い場合でも、実験に基づく投入石の挙動を再現するシステムとなっており、投入位置精度が向上する(精度向上)。
(9)投入位置、投入量、投入形状が電子化により記録できるため、作業の管理が可能となる(効率向上)。
(10)過去の作業位置への回帰性が良い(効率向上)。
(11)水中作業の近代化が図れる(将来性向上)。
【0008】
また、この発明に係る捨石投入シミュレーション作業支援装置によれば、海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入作業において、投入作業の前にシミュレーションを行うことにより、捨石の投入回数に対応した海水底堆積捨石マウンド形状を事前に予測することが可能となり、実際の捨石投入作業計画が行い易くなる効果を有する。
【発明を実施するための最良の形態】
【0009】
以下、図面に記載の発明を実施するための最良の形態に基づいて、この発明をより具体的に説明する。
【0010】
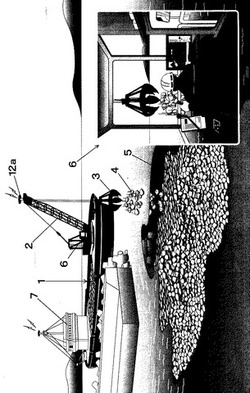
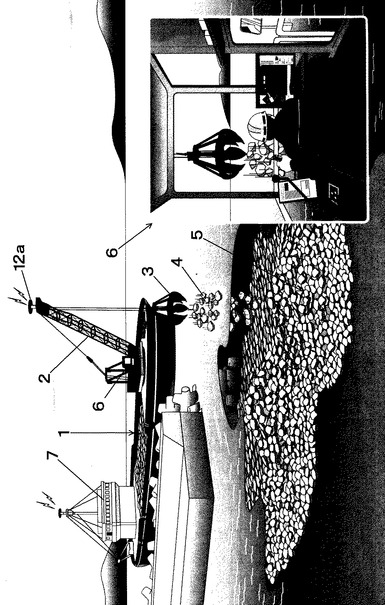
図において、捨石投入作業支援装置は、作業船1のクレーン2に吊り下げられたグラブ3から海底や水底などの海水底地盤上に捨石4を投入して海水底地盤上に捨石4のマウンド5を形成する捨石投入作業において使用される装置である。捨石投入作業支援装置には、船位検出センサー11、グラブ捨石投入位置検出センサー12、グラブ捨石投入時検出センサー13、コンピュータ14に組み込まれて海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段15、当該海水底堆積捨石マウンド形状を表示する表示器16、流向と流速を計測する必要に応じて使用される流向流速計17などから主に構成されている。
【0011】
また、捨石投入シミュレーション作業支援装置は、作業船1のクレーン2に吊り下げられたグラブ3から海底や水底などの海水底地盤上に捨石4を投入して海水底地盤上に捨石4のマウンド5を形成する捨石投入作業において、投入作業の前にシミュレーションを行う場合に使用される装置である。投入作業の前にシミュレーションを行うことにより、捨石4の投入回数に対応した海水底堆積捨石マウンド形状を事前に予測することが可能となり、実際の捨石投入作業計画が行い易くなる利点がある。捨石投入シミュレーション作業支援装置は、上記の捨石投入作業支援装置で使用される機器の一部の海水底堆積捨石マウンド形状推定手段15と表示手段16が必須であり、これ以外の機器も上記捨石投入作業支援装置で使用される機器が一部利用される。
【0012】
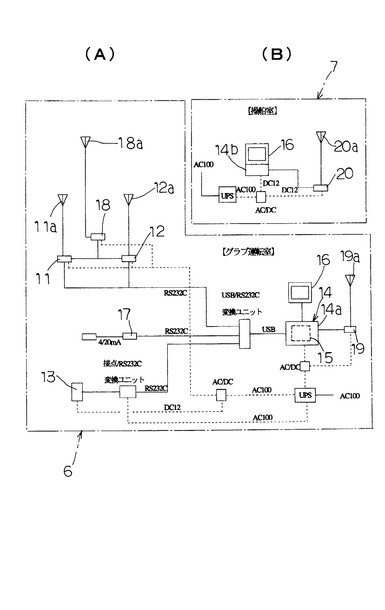
船位検出センサー11は、作業船1の位置をGPS測位で求める機器で、作業船1の位置の特定が図られる。船位検出センサー11には例えばDGPS(ビーコン付)や精度の高いRTK−GPSが使用される。DGPSやRTK−GPSにより作業船の位置の演算を行い、作業船1からの投入位置へのグラブ誘導支援と投入位置の確定を行う。特にRTK−GPSの場合には、陸上に別途GPS基準局を設置して補正情報を取得する必要があるが、このGPS基準局を利用することにより、位置機械精度はlcm+2ppmとなり、位置精度は向上する。RTK−GPS受信機の設置はグラブ運転室6内に運転に支障とならないよう配置する。使用する作業船1の電源が不安定な場合にはUPS等設置する。
【0013】
この船位検出センサー11のアンテナ11aは作業船1のグラブ運転室6側の直上に取り付けられている。アンテナ11aの取り付けは、機械室中央の障害物の無い十分な空間のある位置に設置する必要がある。設置前にGPS情報の取得が可能かを確認する。場合によっては、支柱を立ててアンテナ位置を高くする等も必要となる。
【0014】
グラブ捨石投入位置検出センサー12は、捨石投入位置のグラブ位置をGPS測位で求める機器で、グラブ誘導支援、捨石4の投入位置の確定が図られる。グラブ捨石投入位置検出センサー12には例えばDGPS(ビーコン付)や精度の高いRTK−GPSが使用される。DGPSやRTK−GPSにより捨石投入位置の演算を行い、投入位置へのグラブ誘導支援と投入位置の確定を行う。特にRTK−GPSの場合には、陸上に別途GPS基準局を設置して補正情報を取得する必要があるが、このGPS基準局を利用することにより、位置機械精度はlcm+2ppmとなり、位置精度は向上する。RTK−GPS受信機の設置はグラブ運転室6内に運転に支障とならないよう配置する。使用する作業船1の電源が不安定な場合にはUPS等設置する。
【0015】
このグラブ捨石投入位置検出センサー12のアンテナ12aは捨石4を掴むグラブ3を吊り下げる作業船1のクレーン2のジブ先端に取り付けられている。アンテナ12aの取り付けは、アンテナ上面が常に天頂方向を向くように可動式の受け台を設置して、この受け台上にアンテナを取り付ける。なおこの受け台は、クレーン2の旋回により極度に振ら付かない構造とすることが必要である。
【0016】
このグラブ捨石投入位置検出センサー12は捨石投入シミュレーション作業支援装置においても利用されることがあり、グラブ捨石投入位置検出センサー12を利用する場合には捨石投入位置のグラブ位置の入力作業が省略できる。
【0017】
グラブ捨石投入時検出センサー13は、グラブ3による捨石4の投入の有無を確認してコンピュータ14としての例えばパソコンに情報信号を送るため、グラブ運転室6のグラブ開閉レバーの開位置に当るレバー側面に取り付けられている。グラブ捨石投入時検出センサー13には例えば近接スイッチが使用されている。
【0018】
海水底堆積捨石マウンド形状推定手段15は、グラブ捨石投入時検出センサー13からの投入時情報に基づいてグラブによる捨石投入毎に捨石投入条件からガウス分布に基づき捨石マウンド5の形状を演算し上記グラブ捨石投入位置検出センサー12からのグラブ位置情報と入力された海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定するもので、コンピュータ14にソフトとして組み込まれている。コンピュータ14には例えばパソコンが使用される。パソコンは作業船1のグラブ運転室6に持ち込まれて使用される。
【0019】
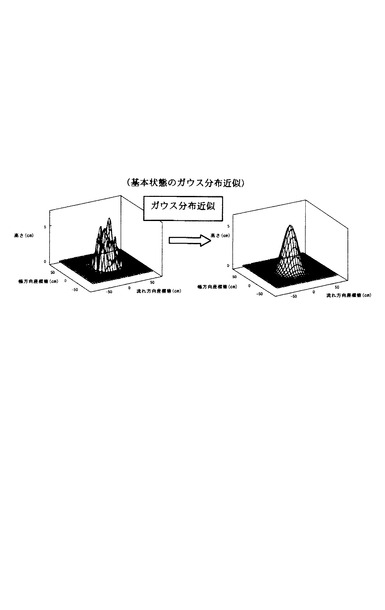
本願の発明者は、種々の実験により、水底や海底に投入された捨石4の海水底堆積捨石マウンド形状がガウス分布の式を用いて、平面へ投石した場合のマウンド5の形状が表現できることが分かった(図4参照)。
レーザーで計測した面データを、次式で表されるガウス分布で近似してこの式に現れるピーク高さ、分散、ピークのずれを、各実験ケースで求め、水深、波高などのパラメータに対する傾向を把握する。
Z(x,y)=H0×EXP(−((x−x0)2十(y−y0)2)/2/σ2)
Z(x,y):投入位置をx=y=0とした場合の海水底からの面の高さ
x0 :ピークの流方向のずれ
y0 :ピークの流方向と直角方向のずれ
H0 :ピーク値
σ :分散
なお、x0,y0は実測データZ(x、y)の値から次式で求める。但し今回の実験では、潮流試験のx0以外は実験上の誤差として計算上求まる数値である。
x0=Σ{x×Z(x,y)}÷N(計測データ数)
y0=Σ{y×Z(x,y)}÷N(計測データ数)
H0、σは、実測値Z(x,y)とガウス面高さH(x、y)の差の2乗和が最小となる組み合わせとして求める。
誤差の2乗和=Σ(H(x,y)−Z(x,y))2
ピーク値(H0),ピークの流方向ずれ(x0),分散(σ)の推定
求めたH0,x0,σと水深、捨石比重などのパラメータとの関係をもとに、与えられた水深、捨石比重などの捨石条件に対するH0,x0,σを求め、マウンド形状を予測する。
このような水深、比重、波高、流速、投石回数など多数の影響因子によって決まる値を求める補間手法として多変量解析法を用いる。
【0020】
多変量解析等の考え方
(1)多変量解析
ある物理量が複数の変数で表される場合、実測変数とそれに対する実測物理量のデータベースをもとに、任意の変数に対する未知の物理量を予測する手法である。
変数が1個の場合、一次式を用いた最小自乗法がよく知られているが、それは未知量をyi、変数をxi、とし、未知量に対する予測式を(但し、Yiはyiの予測値である。)下の式(1)のように表し、実測と予測値との差の2乗、すなわち、(yi−Yi)2が最小となるaとbを求めることである。
Yi=a+bxi (1)
変数が複数個になった場合に於いても、上記の変数が1個の場合と同様にして、複数の変数の一次式で予測式を表し実測と予測値の差の2乗が最小となるように、予測式中の係数を求める。
今回はガウス近似式のマウンド高さH0,分散σ、マウンド中心位置のずれx0のおのおのに対して(2)の形で表現された式が3個できる。(1)式のxiに相当する変数は、(2)式ではξ,η,ζ,u,v,wの6種類で、水深、比重、1回投入量、グラブ開度、潮流、波高である。a,b,c,d,e,f、gは偏回帰係数と呼ばれ、実験データから得られる統計的な数値で表現された6×6の連立一次方程式から求められる。
Y=aξ+bη+cζ+du+ev+fw+g (2)
この式のa,b,c,d,e,f,gの偏回帰係数が求まれば、任意の変数ξ,η,ζ,u,v,wに対するマウンド高さH0、分散σ、マウンド中心位置のずれx0が求まる。
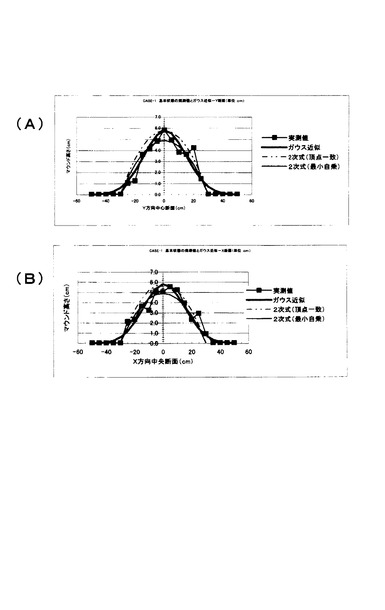
(2)ガウス分布近似
実験結果の面データの近似式としてガウスの式を用いた理由として以下は通りである。今回実験を行った投石の散乱現象は、流体的な乱れに起因するランダムな現象であるが、特定の値や場所の周りにランダムに分布する現象の確率はガウス分布で近似されることが多い。下図に基本状態の中央断面(x,y)の実測データ、ガウス分布近似、2次式近似(頂点一致させた場合と最小自乗近似)の比較を示す。
(図5(A)(B)参照)
頂点付近の一致が他の方法より良好である。また、今回のデータは主マウンドのみであるが、実際は主マウンドの外に散乱した石が存在している、この散乱石は投石回数を重ねることで山の裾野を形成するが、その表現ができるのがガウス分布の特徴でもある。
【0021】
捨石模型実験を行うことにより、実験条件を数種類変えて捨石投入における捨石の挙動を確認、把握することができた。特に波高の影響が少ない事、潮流に対してはその強さに応じて流されるが、広範囲にわたってばらばらになることなく潮流が無い場合とほぼ同じような堆積状態となり、当初の予測と異なっていた事、捨石の落下高さが影響すること、捨石比重の影響が無い事等現時点まで未解明であったグラブによる捨石投入時の投石メカニズムの貴重な知見が得られた。
そして、この模型実験結果をもとにガウス分布式を用いたシミュレーション計算を行い、モデル化により投石したマウンド形状をグラフィック化し、リアルにかつリアルタイムに予測するシミュレーション技術の捨石投入作業への応用の可能性が得られた。
【0022】
海水底堆積捨石マウンド形状推定手段15が捨石投入作業支援装置又は捨石投入シミュレーション作業支援装置に使用される場合に、ガウス分布の捨石投入条件は上記の実験結果から分かったように、水深、グラブ3の捨石掴み容量、潮流速、潮流向である。上記したように、波高の影響が少ないこと、捨石の比重の影響がないことが分かり、これらはガウス分布の捨石投入条件に入れなくてよいことになった。
【0023】
海水底堆積捨石マウンド形状推定手段15では、海水底を直交するX方向とY方向とにメッシュ状に分割し、海水底堆積捨石マウンド形状を分割されたメッシュ状で平面コンタ図、叉中央の縦横断面図、色分けメッシュ図で表示させる。縦横のメッシュの間隔としては例えば5m間隔である。
【0024】
コンピュータ14としての例えばパソコンの海水底堆積捨石マウンド形状推定手段15で利用される海水底地形情報は、別途の深浅測量システムにより計測された海底や水底の地盤地形の情報が入力されて使用される。
【0025】
表示器16は、コンピュータ14としての例えばパソコンの海水底堆積捨石マウンド形状推定手段15で求められた海水底堆積捨石マウンド形状や作業船位置を例えばパソコン画面に画像として表示するもので、コンピュータ14のディスプレーなどがこれに該当するが、海水底堆積捨石マウンド形状推定手段15で求められた海水底堆積捨石マウンド形状や作業船位置をプリンタで出力する場合にはプリンタがこれに該当する。
【0026】
流向流速計17は、潮流の影響にともなう捨石4の投入位置の補正を行うために、流向と流速を計測する機器で、例えばデジタル流向流速計が使用される。機種はグラブ運転室6に設置するパソコンにデータをリアルタイムに出力できる仕様のものを選定する。
【0027】
流速計のセンサー部分は作業船1の捨石投入側の船首舷側に取り付ける。方向舵の付いた機種の場合、舷側より30cm程度オーバーハングするような支柱を設け、船底下まで吊り下げる。本体部は防滴ケースに入れて甲板上に固定し、データケーブルを余裕を持たせてグラブ運転室6のパソコンに接続する。流向流速計17は簡易計測の場合には省略されることもある。
【0028】
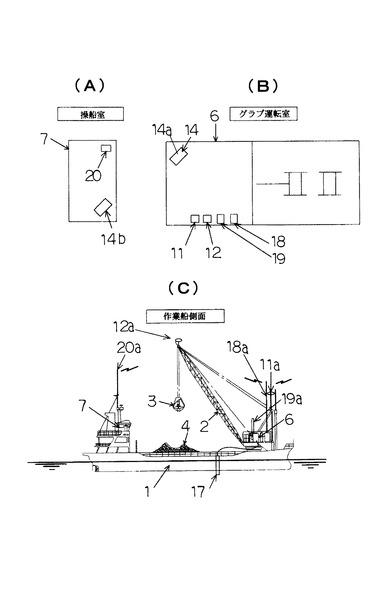
また、上記以外の機器が必要に応じて作業船1に設置されることにより、機能の拡張が図られる。コンピュータ14としての施工管理用主パソコン14aはグラブ運転室6が狭い場合には、B5サイズのノート型パソコンで十分対応できる。グラブ運転者の見やすい場所に設置して固縛する。周囲の光源により画面が見にくい場合には、画面周辺をボール紙等でオーニングして対応する。
【0029】
GPS補正情報受信用無線機18は、陸上に設置する図示しないGPS基準局からの補正情報を作業船1側で受信し位置補正の演算に使用するもので、GPS受信機同様グラブ運転室6内に配置することが望ましい。
【0030】
施工情報送信用無線機19は、グラブ運転室6に設置したグラブ操作者が見るコンピュータ14のパソコン画面の施工管理画面と同じ画面を、作業船1の操船室7等の離れた位置でも見られるように情報を送信するもので、グラブ運転室6の適当な位置に設置する。
【0031】
GPS補正情報受信用無線機アンテナ18aは無指向性のものを使用し、陸上に設置する図示しない補正情報送信用無線機アンテナの方向に向くようにグラブ運転室6側の適当な位置に設置する。出来る限り高い位置への設置が望ましい。
【0032】
施工情報送信用無線機アンテナ19aは無指向性のものを使用し、作業船1の操船室7側に設置する施工情報受信用無線機アンテナ20aの方向に向くようにグラブ運転室6側の適当な位置に設置する。施工情報受信用無線機アンテナ20aは指向性とするため、出来る限り同じ高さの位置で、グラブ旋回途中でも両アンテナが向き合える位置が良い。
【0033】
施工管理用補パソコン14bは、グラブ運転室6に設置したグラブ操作者が見る施工管理用主パソコン14aのパソコン画面の施工管理画面と同じ画面を、作業船1の操船室7等の離れた位置でも見られるようにするもので、操船室7内に設置する。周囲の光源により画面が見にくい場合には、画面周辺をボール紙等でオーニングして対応する。室が狭い場合には、B5サイズのノート型パソコンで十分対応できる。なお船内電源が極端に不安定な場合には、UPS等を設置する。
【0034】
施工情報受信用無線機20は、グラブ運転室6側に設置した施工情報送信用無線機19から伝送された情報を操船室7側で受信するもので、操船室7内に設置する。
【0035】
施工情報受信用無線機用アンテナ20aは指向性のものとし、施工情報受信用無線機20の付近で操船室7前面の窓ガラスの内側に、グラブ運転室6側に設置する施工情報送信用無線機アンテナ19aの方向を向くように設置する。通常船舶の窓ガラスであれば、電波はガラスを貫通して受信できる。グラブ旋回途中でも両アンテナが向き合える位置が良い。なお、防水型のアンテナであれば操船室7上に設置しても良い。
【0036】
次に、上記発明を実施するための最良の形態の構成に基づくコンピュータ14としての例えばパソコンを使用しての捨石投入作業のプログラム操作は次のようにして行われる。
【0037】
プログラム操作
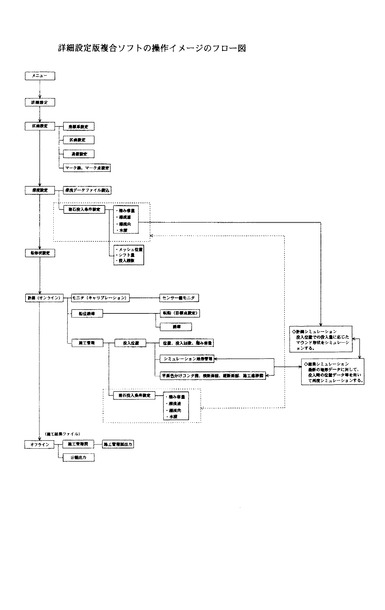
本プログラムでは、機能を縮小して初期設定を容易にした「簡易設定版」と事前シミュレーションや表示画面の詳細設定などの機能を搭載した「詳細設定版」で構成されており、メインメニュー画面にて選択できるようにしている。
詳細設定版を使用する場合にはプログラム起動時の画面で、「詳細設定」のボタンをクリックする。すると、「詳細設定モード」のメニュー画面に切り替わる。次回からは、この画面が「メインメニュー」となり、「簡易設定モード」に戻る場合には、「簡易設定」のボタンをクリックする。
【0038】
(1)メインメニュー
プログラム起動時、各モード実行後はメニューウィンドウが表示される。
「詳細設定モード」には例えば次のような主な機能がある。
“区画設定”は、施工区域の座標系、施工区画の登録、を行う。
“深度設定”は、施工区域の原地盤の深度を登録する。
“船形状設定”は、施工する船の寸法、センサー取り付け位置等の船に関する情報の登録、管理を行う。
“シミュレーション”は、施工条件の指定により投入時の結果として地盤形状の変化をあらかじめシミュレーションし、施工時の投入位置、回数などの指標を示す。
“船位誘導”は、目標の施エポイントまで船をリアルタイムで誘導する。
“施工管理”は、施工時の船位、バケット位置等をリアルタイムで計測し、グラフィックモニタする。投入された捨石のマウンド形状をシミュレーションして平面図、縦横断図としてリアルタイムに色分け表示する。
“モニタ”は本システムに接続されている全てのセンサーのデータ値をモニタし、計測値のチェックを行う。
“施工管理図”は、施工管理される地盤高データの管理テーブルを表形式、図形式で表示し異常値等のチェックを行う。また、各管理深度の深度情報を色分け図、横断、縦断図と表示し、結果をプリンタに出力する。
“日報”は、日付毎の投入作業を日報の形式で出力する。
【0039】
(2)区画設定
メニューより“区画設定”のクリックで以下の様なウィンドウが表示される。
区画情報の設定は以下の4個のタグで管理される。
座標系:国家座標系番号、ローカル座標系の設定、GPS変換パラメータの設定
区画:施工区画(法線、区域、メッシュピッチ等々)
マーク線:施エアリア周辺の目印となる様なマークを線で表示する機能
マーク点:施エアリア周辺の目印となる様なマークを点で表示する機能
1)座標系の設定
「座標系」のタグをクリックする。
a)国家座標系の指定
国家座標系の窓をクリックして、現在地の座標系を選択する。平面直交座標系No,1〜19の指定となる。
b)ローカル座標系の設定
現場の施工区画を設定する際に、施工現場でローカル座標を採用する場合に、ローカル座標の原点座標を国家座標値で入力する。ローカル座標の原点位置はどこでも構わないが、施工区画の法線上に設けると施工区画を設定する際に便利である。
ローカル座標系を設定する場合はローカル座標系原点の国家座標値(x,y,z)とローカル座標系の回転角(北を0度で時計回り)を設定する。
c)GPSパラメータの設定
ここではJGD2000にクリックしてチェックを入れる。
この座標系は、現場で使用する座標系に合わせる。
d)補正値の設定
Tkyodatum旧、新およびJGD2000を採用した場合に、現場の座標が合わない場合に補正値を入力するが、一般的には入力の必要はない。
GPS測位結果の補正係数(x、y、z、θ)の設定
注)補正処理はローカル座標系の処理と同処理である。
ローカル座標系は国家座標系の他に現場特有(ローカル)の座標系を使用している場合の、ローカル座表系原点の国家座標値とローカル座標系の国家座標系からの回転角を登録する。
e)通信
RTK−GPS(D−GPS)2台と投入ボタン(近接スイッチ等)1個の通信条件を設定する。なお設定に際しては、事前に使用する機器の仕様確認が必要である。
・COMポート
データがパソコンのどのポートに入力されるか、窓をクリックして選択設定する。
・プロトコル
通信のボーレート、パリティー、ストップビット、データ長を窓をクリックして選択設定する。
・使用データ
使用データのモードを、窓をクリックして選択設定する。
RTK−GPS使用の場合はモード3、D−GPS使用の場合はモード2とする。
f)「作図更新」ボタンクリック
2)区画
「区画」のタグをクリックすると、施工区画の設定画面となる。
a)区画No設定
区画は10区画入力可能である。区画はメッシュ(格子)で管理される。
b)法線設定
捨石投入の場合、投入区画の周辺に石が広がるため、区画周辺に5m程度広げて区画を設定する。メッシュは法線からの自動割付となるため、法線は広げた原点より区画の最左端をP1,最右端をP2とする。
注)縦方向:法線方向
横方向:法線直角方向
c)法線の色選択
表示色のところを右クリックして、パレットから色選択。
d)法線の線の太さ選択
表示線の窓をクリックして太さ選択。
e)区画ピッチ設定
1メッシュの寸法を入力。
f)メッシュの作成数設定
法線P1からP2を見て、左、右に作成メッシュ数入力。
g)区画の色選択
表示色のところを右クリックして、パレットから色選択。
h)区画線の太さ選択
表示線の窓をクリックして太さ選択。
i)メッシュ番号
縦方向、横方向のメッシュ番号を選択。
j)割付開始
縦方向、横方向のメッシュ番号の割付開始番号を選択。
k)設計レベル入力
石投入設計天端高さおよび法面の法尻高さを入力。断面図に計画線が反映する。
l)法勾配入力
断面図に計画線が反映する。
m)「作図更新」ボタンクリック
投石区域(緑線)に投入すると、法が付くため法尻を考慮して、投石区域4周に5m延長した区域(黒線)を施工区域として設定する。
3)マーク線
マーク線は実際の区画登録、施工には直接関係がないが、登録された区画周辺の目印等のポイントを登録し区画表示と平面図表示時に同じに表示する事により座標の入れ間違いや、表示方向の確認および周辺の注意部分等の表示に役立つ。
「マーク線」のタグをクリックする。
a)線の位置を入力
既設ケーソンやマウンド全体の形状等を描く。
入力ボックスに線の各コーナー点の座標(X,Y)を入力する。
・先ず、入力する座標系を座標系の窓をクリックして選択。
「国家座標系」と「ローカル座標系」を交互に選択できる。通常は「ローカル座標系」が便利である。
・線の座標をローカル原点よりローカル座標で入力。
b)線の色選択
「色」のところを右クリックして、パレットから色選択。
c)線の太さ選択
「線」の窓をクリックして太さ選択。
d)線を結ぶか、結ばないか選択
「結」の各ボタンをクリックしてチェックを入れる。
e)「作図更新」ボタンクリック
入力データの「挿入」「削除」ができる。
「挿入」:「挿入」をクリック後、現在(カーソル位置)の行に新規の行を挿入する。
よろしいですか?Y,Nで選択。
「削除」:「削除」をクリック後、現在(カーソル位置)の行を削除する。
よろしいですか?Y,Nで選択。
4)マーク点
マーク点は実際の区画登録、施工には直接関係がありませんが、登録された区画周辺の目印等のポイントを登録し区画表示と平面図表示時に同じに表示する事により座標の入れ間違いや、表示方向の確認および周辺の注意部分等の表示に役立つ。
「マーク点」のタグをクリックする。
a)マークの位置を入力
旗やブイ、アンカー位置等目印を描く。
入力ボックスにマーク位置点の座標(X,Y)を入力する。
・先ず、入力する座標系を座標系の窓をクリックして選択、
・マーク点の座標を入力。
b)マークの色選択
「色」のところを右クリックして、パレットから色選択。
c)マークのサイズ選択
「サイズ」の窓をクリックしてサイズ入力。(入力数値は8以上)
d)マークの種類選択
「マーク」の窓をクリックしてパレットから形状を選択。
キャラクタは○●◎△▽・・◇◆□■◇◆×※☆★となっている。
e)使用、不要の選択
使用する場合、「使」ボタンをクリックの上、チェックを入れる。
f)「作図更新」ボタンクリック
入力データの「挿入」「削除」ができる。
「挿入」:「挿入」をクリック後、現在(カーソル位置)の行に新規の行を挿入する。
よろしいですか?Y,Nで選択。
「削除」:「削除」をクリック後、現在(カーソル位置)の行を削除する。
よろしいですか?Y,Nで選択。
【0040】
(3)深度設定
「深度」タグをクリック
(A)一定値の場合
a)深度値色分け入力
「色設定」ボタンをクリックすると、深度色分けテーブルが表示される。
深度色分けテーブルの「値」の欄に必要な深度幅の深度を入力する。入力は必ず表の左下から深い順に入力する。さらに追加の場合は右欄に同様に入力する。また出来る限り、細かなピッチで入力する。
テーブルの「値」の位置をクリックして深度を入カ
−17.5,−17.0,−16.5,−16.0,−15.5,−15.0,−14.5のように細かいピッチで入力も可能。
b)深度色分け
深度色分けテーブルの「色」の欄に深度別に色を入力する。
・テーブルの「色」の窓をクリック。
・パレットから色を選択。
・「OK」クリック。
c)深度設定
・「深度データ」窓をクリックし表示する深度を選択。
・「クリア」下の「固定値」の窓をクリックし、設定したい深度を入力。
・「実行ボタン」クリック
現在表示されている深度データを、下記の設定値にする。よろしいですか?Y,N選択。「はい」をクリック。
深度のテーブル表に50cmメッシュにて深度が入力される。
d)「作図更新」ボタンクリック読込完了
e)「戻り」ボタンクリック
なお、「クリア」の中の「データ」にチエックを入れて深浅値を選択して「実行」により、施工外のシミュレーションにて採用する深浅値の選択ができる。
(B)深浅データファイル読み込み(自動読込み)の場合
a)深度値色分け入力
「色設定」ボタンをクリックすると、深度色分けテーブルが表示される。
深度色分けテーブルの「値」の欄に必要な深度幅の深度を入力する。入力は必ず表の左下から深い順に入力する。さらに追加の場合は右欄に同様に入力する。また出来る限り、細かなピッチで入力する。
テーブルの「値」の位置をクリックして深度を入カ
−17.2,−17.0,−16.8,−16.6,−16.4,−16.2,−16.0のように細かいピッチで入力も可能。
b)深度色分け
深度色分けテーブルの「色」の欄に深度別に色を入力する。
・テーブルの「色」の窓をクリック。
・パレットから色を選択。
・「OK」クリック。
c)「深浅記録ファイル読み込み」ボタンクリック
現在の深浅結果と更新する。よろしいですか?Y,N選択。
「はい」をクリック。
d)深浅測量ファイル呼び出し
「ファイル名」のボックス内クリックし、ファイルを呼び出す
e)深浅測量ファイル選択
ファイルを選択してWクリック
f)深浅測量ファイル読み込み
・「データ情報」の項で、深浅測量値の記録方式を選択して、チェックを入れる。
国家座標系またはローカル座標系の選択
・「読み込み方式」の項で、「新規読み込み」か「追加読み込み」かを選択して、チェックを入れる。
・データ順序の項で、深浅測量データファイルのデータ記録の列び順序が「縦、横、高さ」か「横、縦、高さ」かを選択して、チェックを入れる。
g)FULLメッシュの項にチェックを入れる。
h)「読込実行」ボタンクリック
深浅結果データを新規(現在のデータを破棄して)読込ます。よろしいですか?
i)「戻り」ボタンクリック
j)作図更新
「作図更新」ボタンクリック
原地盤データが読み込まれる。
k)「戻り」タブをクリック
【0041】
(4)船形状設定
メニューより“船形状設定”のクリックで以下の様なウィンドウが表示される。
1)形状寸法の設定
船形状設定は本システムを導入する作業船の寸法、GPSアンテナ取り付け位置、クレーン格納ポジションの固定値を事前に設定する。
a)船体寸法
クレーン旋回中心を原点(0,0)とする船内座標で数値手入力する。
b)ジブ先端GPS12a設置位置
クレーン先端の滑車中心を原点(0,0)とし、先端方向+、右方向+とした船内座標で数値手入力する。
c)グラブ運転室側GPS11a設置位置
クレーン旋回中心を原点(0,0)とし、ジブ方向+、右方向+とした船内座標で数値手入力する。
2)石運船
石運船の有無と作業船に対する係留位置を指定する。
a)なし
石運船が作業船に接舷しない場合には、「なし」にチェックを入れる。
b)ケース左
石運船が作業船の左舷に接舷する場合には、「ケース左」にチェックを入れる。
c)ケース右
石運船が作業船の右舷に接舷する場合には、「ケース右」にチェックを入れる。
3)投入判定
投入予定地点にクレーンでグラブを誘導後、グラブを開いて捨石を投入した地点をGPSで計測して位置を確定し、その地点での地形変化をシミュレーションする。この投入を行ったか否かの判定には以下の4通りの方法があり、現場状況により選択できる。選択は、選択項目にチェックを入れる。
a)画面ボタン(手動操作)
画面ボタンは「施工管理」画面にある「投入」ボタンを投入毎に手動でクリックして、投入位置を確定する。センサの取り付けが困難な場合に適し、投入位置確定精度が良い方法である。
b)外部ボタン(手動操作)
外部ボタンは、別途「押しボタン」をパソコンに接続して、投入毎に手動でボタンを押して、投入位置を確定する。センサーの取り付けが困難な場合に適し、投入位置確定精度が良い方法である。「押しボタン」は運転者の膝元で操作できるため、正確性を期すためには簡易で良い方法である。
c)近接SW(自動操作)
近接SWは、グラブ開閉レバーの開の位置に近接スイッチを設置して、パソコンヘの自動信号伝達により投入位置を確定する。物理的にセンサーの取り付けが可能である場合には、投入位置確定精度も良く自動で行え最も良い方法である。
d)座標判断(自動操作)
座標判断は、クレーンが投入目標位置まで旋回してグラブを開いて投入後、戻り旋回を始めたタイミングでGPS計測値の変化を自動で判断して投入位置を確定する。
船自体の揺れ、タイミングのずれ、非投入でも投入したと判断等により、投入位置確定精度はかなり悪くなるが、投入作業の操作性は向上する。荒投入等ある程度精度が要求されない場合、急速施工に適する。
入力が終わったら、「作図更新」ボタンクリック後、いったん「メニューへ戻る」ボタンをクリックしてメニュー画面に戻る。
【0042】
(5)シミュレーション
シミュレーションを行うには、「メニュー」画面の「シミュレーション」ボタンをクリックする。
すると、以下のシミュレーション画面が表示される。
1)捨石投入条件の設定
シミュレーションの条件を設定する。
a)メッシュ
投入位置のメッシュ名を、窓をクリックして選択入力する。
b)シフト
投入位置はメッシュの中心に自動割付されているが、投入位置のシフトがある場合には、シフト量を窓をクリックして法線方向、法線左右方向の順に数値入力する。
c)水深
原地盤の平均水深を、窓をクリックして数値入力する。
d)流向
潮流の方向を数値入力する。
e)流速
潮流の速度をノット換算して、数値入力する。
f)掴み容量
グラブが1回当りに掴む石の容量を入力する。
g)疫入回数
シミュレーションを行う捨石の投入回数を入力する。
なお、この設定値の内c)水深、d)流向、e)流速、f)掴み容量については「施工管理画面」とリンクしており、施工途中で変更したい場合には「施工管理画面」上で設定数値の変更ができる。
2)シミュレーション
a)「クリア」の「深浅値」ボタンをクリックする。
なお、原地盤の深浅値を固定値とする場合には、固定値の窓をクリック後数値入力して、「固定値」ボタンをクリックする。
b)「登録」ボタンをクリックする。
c)「計算実行」ボタンをクリックする。
これにより、シミュレーションが実行される。
なお、「削除」「挿入」ボタンのクリックにより「登録」内容の変更ができ、「戻り」
ボタンのクリックにより、「メニュー」画面に戻る。
【0043】
(6)モニタ
計測に入る前に、設置しているセンサー等の通信状態と入力値が正常か、モニタ画面で確認する。
メニュー画面より「モニタ」ボタンをクリックする。
確認後、「戻り」ボタンをクリックしてメニュー画面に戻る。
【0044】
(7)船位誘導
a)転船目標点設定
メニューより“船位誘導”のクリックで船位誘導ウィンドウが実行される。
この船位誘導ウィンドウ内の“目標点”のクリックで以下の様なウィンドウが表示される。本モードでは転船時の目標位置(位置と入船方位)の設定を行う。位置の指定はメッシュ名の指定と離隔距離、シフト量の指定で行う。
1)投下目標位置
a)投下目標位置の窓をクリックして、投下目標のメッシュ位置の番号を選択する。
b)または、施工区域メッシュの目標位置(2−C)にマウスを合せクリックにより選択される。
2)入船方位
入船方位の項から作業船の船首がメッシュのどの方向から進入するか選択する。
3)離隔距離
作業船の中心(クレーン旋回中心)と投下目標点となるメッシュの中心位置(投下時グラブ位置)との間隔を、「離隔距離」の窓をクリックして数値入力する。この時、作業船の船首方向に対して船首+、船尾−、右舷+、左舷を−として入力。
4)シフト量
投下目標点がメッシュの中心位置(投下時グラブ位置)で無い場合に「シフト量」の前後、左右の窓をクリックして数値入力する。この時、作業船の入船方向に対して左舷を−、右舷を+、前方を+、後方を−として入力。
5)台船とクレーン
通常は作業船の船首を0度として、船尾方向に180度旋回した位置を「クレーン格納」位置とし、これを「ホーム位置」とする。したがって通常は「ホーム」にチェックを入れる。
転船・船位誘導時に、「クレーン格納」位置が「ホーム位置」の位置と異なる場合には、「台船とクレーン」の「旋回」にチェックを入れ、窓をクリックして旋回角度を数値入力して設定する。
6)「実行」ボタンクリック
これで「位置誘導」画面に戻る。
b)船位誘導
メニューより“船位誘導”のクリックでウィンドウが表示される。
船位誘導モードでは現在位置と目標位置が必ず表示されるように自動スケーリングで表示される。
誘導量に関しては船の各隅、目標位置、クレーン旋回位置の各点での誘導量が表示される、小さなウィンドウが表示される。
これらのウィンドウは移動、最小化ができるので、自由な位置で自由なウィンドウを表示する。(次回からは同じ位置、状態で実行される)
GPSの情報としてmode、pdop、svnが表示される。
総合的にはmodeの値3の場合は最も精度が良くなる。
mode=1,2,4の場合はこの部分の表示が赤色となり、精度劣化を知らせる。
誘導が完了して船の位置が定まったら、「終了」ボタンをクリックして「メニュー」画面に戻る。
【0045】
(8)施工管理
1)メニューより“施工管理”のクリックでウィンドウが表示される。
本モードではクレーン先端(グラブ位置)を、クレーンの旋回にもとづきGPS情報によりリアルタイムでモニタする。深度は1升50cmメッシュ毎に色分け表示する。
深度の色分けは、−20m〜−5mの範囲で50cmのピッチで深度毎に事前に色分け設定されているが、「深度設定画面」にて自由に設定できる。
現在のバケットがある位置のメッシュ名が「位置」に、そのメッシュヘの投入回数の累積値が「投入回数」にそれぞれ表示される。
2)「深度設定」画面にて設定した捨石投入条件(掴み容量、流向、流速)を施工中に変更する場合には、この画面の捨石投入条件の各窓をクリックして、数値を入力する。
ここでは変更なしとして、そのままにする。
3)GPSの情報としてmode,pdop,svnが画面右下に表示される。
総合的にはmodeの値が3の場合が最も精度が良くなる。
Mode=1,2,4の場合にはこの表示が赤色となり、精度の劣化を知らせる。また、svnは4以上必要である。
4)グラブで石を掴み、クレーンを旋回して投入地点で投入したら
a)外部投入ボタン設置の場合には、ボタンを押す。
b)外部投入ボタンを設置していない場合には、画面の「投入」ボタンをクリックする。
これにより、石の投入位置を確定しGPS測定座標が記録され、この位置で捨石のシミュレーションが行われ加算される。
5)石が投入(ボタンが押されると)されると画面中央に平面コンタ図、画面左端に縦断面、画面下端に横断面を表示する。投入されたメッシュの表示したい位置をマウスでクリックすることにより、縦断面及び横断面が表示され、クリックされた位置の位置線が表示される。
6)施工が終了したら、「終了」ボタンをクリックしてメニュー画面に戻る。
【0046】
(9)施工管理図
施工終了後、施工管理図画面によりオフラインにて施工状況の確認及び平面図、縦横断図を作成して出力できる。
メニュー画面の「施工管理図」ボタンをクリックする。
1)表示
表示では深度管理テーブルを表、図形式の表示を行う。
表形式では深度色分けとしてセルのバックカラーが色分けされる。
各セルのカーソルの移動が可能で、直接内容を管理できる。
表、図形式の表示の切り替えは、「切替(表/グラフィック)」のクリックで行う。
「表示」をクリックした際に、グラフィックで採用する水深値を詳細設定版では4種類から選択できる。
・設計データ:設計水深値での表示
・深浅データ:深浅測量値での表示
・施エデータ:捨石投入を行った場合のシミュレーション結果表示
・シミュレーション:検討のためのシミュレーションを行った場合の結果表示
したがって、施工時の結果を表示したい場合には「施工データ」を必ず選択する。
a)深度色分け表
b)深度色分けグラフィック
「表示」の中にはファイル選択が2種類ある。
作業終了後「メニュー」より「終了」ボタンをクリックすると、この「表示」の中の「過去のファイル」に個別ファイルが自動保存されている。
・過去のファイル:このファイルは読み込み表示は可能であるが、施エデータとしては更新されず施工日毎の個別ファイルとなっている。後日各施工日毎に確認したい場合には、このファイルから選択する。
・最新のファイル:過去のファイルを選択して読み込むと、一旦最新のファイルとして登録される。このファイルを用いて、過去に行った施工区域で継続して施工を行うことができる。この場合、データは上書きされる。
「出力」の中の「ファイル」は「Graph−R」というグラフィックソフトを用いてコンタ等を作成する際のファイルフォーマットで、通常は使用しない。
2)施工管理図
施工結果の色分け図、断面(横断、縦断)の出力を行う。
施工管理画面の「出力」をクリックすると、画面が表示される。
各出力条件の設定後出力する。
a)色分け図の作成
◇色分け図設定
「出力」クリック後、「色分け図設定」を選択クリックすると色分け図設定ウインドウが表示される。
出力される図表のタイトルとして工事名(20文字2行)、施工者(20文字)、備考(20文字)の設定と色分け図の出力スケール、用紙の指定となる。
工事名、施工者、備考は他の出力(断面図等)と共通の内容となる。
スケール、用紙は色分け図専用の設定内容となる。
◇色分け図の出力
「色分け図設定」後「戻る」で戻り「色分け図」を選択する。
印刷プレビュー機能として画面表示される。
用紙にあたる部分を左クリックで拡大、右クリックで縮小となる。
内容を確認して、プリンタヘ出力する場合は“印刷”をクリックする。
b)縦断面図、横断面図の作成
◇断面(縦断、横断)図の設定
「出力」クリック後、「断面図設定」を選択クリックする。
縦断または横断図の用紙寸法、縮尺、表示軸数、表示位置を選択する。
断面図の出力は縦、横軸毎のスケールの指定となる。
縦(深度)軸のスケールは自動/手動の設定が可能である。
断面図出力では1枚の用紙に軸を4段まで、各軸毎に表示データ数が指定可能である。
工事名、施工者名、備考は色分け図と共通である。
出力データの指定は、縦断図、横断図毎にそれぞれのメッシュ位置で指定する。
指定は出力するメッシュ位置の行のクリックでon(青)/off(白)となる。
出力する軸段数、本数の設定により順次上の行より処理される。
◇縦断図、横断図の出力
「断面図設定」後「戻る」で戻り、「出力」の中の「縦断」または「横断」を選択する。
c)施工管理図の終了
施工管理図作成を終了するには、「戻り」、「表示」、「終了」で「メニュー」画面に戻る。
【0047】
(10)日報
メニューより“日報”のクリックでウィンドウが表示される。
「戻り」で「メニュー」画面に戻る。
【0048】
(11)施エファイルの保存
作業終了後「メニュー」より「終了」ボタンをクリックすることにより、以下の2種類のファイルが自動的に保存される。
1)継続ファイル
このファイルはシステムが常に使用する最終状態(本日施エデータ)のデータで続けて施工する場合にはそのまま上書きされて継続できる。
ファイル名:DepthTable3.csv
2)個別ファイル
このファイルは読み込み表示は可能であるが、施エデータとしては更新されず本日のみの施エデータとして個別にデータが自動保存される。
ファイル名:DT3,年月日,番号,csv
ファイルの保存先は、メニューの施工管理図の中の「表示」の「過去のデータ」に保存される。
【0049】
なお、この発明は上記発明を実施するための最良の形態に限定されるものではなく、この発明の精神を逸脱しない範囲で種々の改変をなし得ることは勿論である。
【実施例】
【0050】
捨石投入作業支援装置による施工例
工事場所:北海道檜山郡瀬棚町(瀬棚港実海域試験)
施工数量:捨石30〜300kg/個 200m3
〔施工結果〕
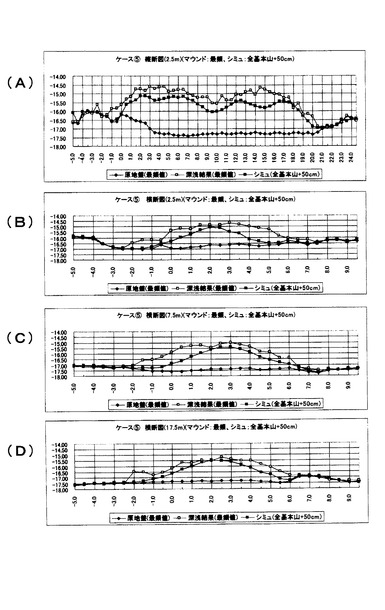
施工結果を図7(A)〜(D)に示す。捨石施工前原地盤(黒線)に対して、シミュレーションによる投石表示(■)、投石後の深浅測量結果(□)の縦断面図、横断面図を示す。縦断面図において、距離0m〜10mまではすX方向の1列の連続した峰を持つ山、10m〜20mまではY方向の5m間隔で谷を持つ山として、投入している。
【図面の簡単な説明】
【0051】
【図1】この発明を実施するための最良の形態を示す捨石投入作業支援装置による施工概念図である。
【図2】(A)はこの発明を実施するための最良の形態を示す操船室の機器配置の概要平面図である。 (B)はこの発明を実施するための最良の形態を示すグラブ運転室の機器配置の概要平面図である。 (C)はこの発明を実施するための最良の形態を示す作業船の機器配置の概要側面図である。
【図3】(A)はこの発明を実施するための最良の形態を示すグラブ運転室の機器配線図である。 (B)はこの発明を実施するための最良の形態を示す操船室の機器配線図である。
【図4】この発明を実施するための最良の形態を示すガウス分布近似の斜視図である。
【図5】(A)はこの発明を実施するための最良の形態を示す基本状態の中央Y断面におけるガウス分布近似図である。 (B)はこの発明を実施するための最良の形態を示す基本状態の中央X断面におけるガウス分布近似図である。
【図6】この発明を実施するための最良の形態を示す詳細設定版複合ソフトの操作イメージのフロー図である。
【図7】(A)はこの発明の実施例を示す2.5m箇所の縦断図である。 (B)はこの発明の実施例を示す2.5m箇所の横断図である。 (C)はこの発明の実施例を示す7.5m箇所の横断図である。 (D)はこの発明の実施例を示す17.5m箇所の横断図である。
【符号の説明】
【0052】
1 作業船
2 クレーン
3 グラブ
4 捨石
5 マウンド
6 グラブ運転室
7 操船室
11 船位検出センサー
11a アンテナ
12 グラブ捨石投入位置検出センサー
12a アンテナ
13 グラブ捨石投入時検出センサー
14 コンピュータ
14a 施工管理用主パソコン
14b 施工管理用補パソコン
15 海水底堆積捨石マウンド形状推定手段
16 表示器
17 流向流速計
18 GPS補正情報受信用無線機
18a GPS補正情報受信用無線機アンテナ
19 施工情報送信用無線機
19a 施工情報送信用無線機アンテナ
20 施工情報受信用無線機
20a 施工情報受信用無線機用アンテナ
【技術分野】
【0001】
この発明は、作業船のクレーン先端等にGPS(Global Positioning System)アンテナを設け、捨石投入用のグラブ位置誘導を行うほか、グラブ誘導位置における捨石の投入量に基づいて海水底地盤上に形成される捨石マウンドの予測形状をリアルタイムに自動表示することにより、視覚的な出来形予測が可能な捨石投入作業支援装置及び捨石投入シミュレーション作業支援装置に関するものである。
【背景技術】
【0002】
従来、港湾建設における防波堤築造工事においては、防波堤ケーソンの据付けに先行して、ケーソンの基礎となる捨石マウンドを海底に築造することとなるが、この基礎捨石マウンド築造における捨石の投入においては作業船の舷側より測量担当者がレッド等を用いた海底地形の測量を頻繁に行い、頭の中にマウンドの出来形をイメージしながら、捨石投入位置と捨石投入量とを作業船グラブ運転者に指示して、計画のマウンドを海底に形成していた。このように、従来の捨石投入作業は投入指示者やグラブ運転者の経験と技術によって行われていた。
【発明の開示】
【発明が解決しようとする課題】
【0003】
防波堤築造に際して行う従来の捨石投入作業においては、投入位置を明示するために区画周辺に目印のボンデン旗を投入設置していたが、流失し易いために何度も設置しなければならないとともに、測量に多大な手間を要した。捨石の投入前後では、海底の捨石山の高さ(水深)を確認する必要があり、レッドを用いて作業船の舷側で測深作業を行ってきたが、水深が深い場合には潮流等でレッドが流され測定が難しく水深を読み間違う場合や、レッドが石に挟まり測定出来ない場合等があった。また、作業船上でのレッド測量は、レッドが重いことや作業船が横傾斜するため苦痛であり、かつ係留索が外れた場合の危険性もはらんでいた。さらに捨石状況はレッド作業担当者のみの頭の中で出来形状況を想像して判断するため、他の共同作業者への視覚的な説明が難しくまた投入区域全体の出来形形状の把握が難しかった。
このように、従来の従来の捨石投入作業においては、次のような課題があった。
(1)現状の海底地盤の状況と捨石投入後の形状の把握は、レッド作業者しか解らない。
(2)投入指示者と投入者が異なる。
(3)現状の海底地盤の状況と捨石投入後の形状の視覚化ができない。
(4)投入施工位置は既設構造物との見透し対比や、投入旗を基準とするため投入位置精度の確保が難しい。
(5)施工能力が小規模であり、急速施工に難がある。
(6)工期短縮、工費縮減が難しい。
(7)作業船の舷側作業のため、安全性に難がある。
(8)重いレットを使用した手作業のため、苦渋作業である。
(9)旗入れ作業等、余分な作業をともなう。
(10)潮流が早い場合にはレッドが流されるため、正確な測深ができず投入位置精度が劣る。
(11)投入位置、投入量、投入形状が記録できないため、作業の管理に手間取る。
(12)過去の作業位置への回帰性が悪い。
(13)水中作業の近代化が図れない。
【0004】
この発明は、上記のような課題に鑑み、その課題を解決すべく創案されたものであって、その目的とするところは、捨石の投入直後の海水底の堆積形状(マウンド形状)をコンピュータ画面上で予測できるので、次ぎに投入する投入位置及び投入量を的確に判断でき、しかもコンピュータ画面上で投入位置に捨石投入用のグラブを誘導でき、目的とする堆積形状(マウンド形状)を海水底に効率よく形成するのを可能にする捨石投入作業支援装置及び捨石投入シミュレーション作業支援装置を提供することにある。
【課題を解決するための手段】
【0005】
以上の目的を達成するために、請求項1の捨石投入作業支援装置に係る発明は、作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入作業において、捨石投入位置のグラブ位置をGPS測位で求めるグラブ捨石投入位置検出センサーと、グラブからの捨石投入時を検出するグラブ捨石投入時検出センサーと、当該グラブ捨石投入時検出センサーからの投入時情報に基づいてグラブによる捨石投入毎に捨石投入条件からガウス分布に基づき捨石マウンドの形状を演算し上記グラブ捨石投入位置検出センサーからのグラブ位置情報と入力された海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段で求められた海水底堆積捨石マウンド形状などを表示する表示器と、を備えた手段よりなるものである。
【0006】
また、請求項4の捨石投入シミュレーション作業支援装置に係る発明は、作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入シミュレーション作業において、捨石投入条件及び入力された投入回数からガウス分布に基づき捨石マウンドの形状を演算しグラブ位置情報と海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状のシミュレーションをする海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段でシミュレーションした海水底堆積捨石マウンド形状を表示する表示器と、を備えた手段よりなるものである。
【発明の効果】
【0007】
以上の記載より明らかなように、この発明に係る捨石投入作業支援装置によれば、次のような効果を奏する。
(1)海底地盤の状況と捨石投入後の形状が視覚化されるため、誰もが状況情報を共有できる(効率向上)。
(2)投入指示者によらず画面を見て、投入者自身で投入できる(効率向上)。
(3)投入施工位置はGPS支援によるため、位置精度が向上する〈精度向上)。
(4)画面を見ながら投入者自身で投入できるため、施工能力が向上し、急速施工が可能となる(効率向上)。
(5)工期短縮、工費縮減に対応できる(効率向上)。
(6)投入作業は遠隔作業となり、安全性が向上する。また、苦渋作業が解消する(安全・環境性向上)。
(7)旗入れ作業等、余分な作業がともなわない(効率向上)。
(8)潮流が早い場合でも、実験に基づく投入石の挙動を再現するシステムとなっており、投入位置精度が向上する(精度向上)。
(9)投入位置、投入量、投入形状が電子化により記録できるため、作業の管理が可能となる(効率向上)。
(10)過去の作業位置への回帰性が良い(効率向上)。
(11)水中作業の近代化が図れる(将来性向上)。
【0008】
また、この発明に係る捨石投入シミュレーション作業支援装置によれば、海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入作業において、投入作業の前にシミュレーションを行うことにより、捨石の投入回数に対応した海水底堆積捨石マウンド形状を事前に予測することが可能となり、実際の捨石投入作業計画が行い易くなる効果を有する。
【発明を実施するための最良の形態】
【0009】
以下、図面に記載の発明を実施するための最良の形態に基づいて、この発明をより具体的に説明する。
【0010】
図において、捨石投入作業支援装置は、作業船1のクレーン2に吊り下げられたグラブ3から海底や水底などの海水底地盤上に捨石4を投入して海水底地盤上に捨石4のマウンド5を形成する捨石投入作業において使用される装置である。捨石投入作業支援装置には、船位検出センサー11、グラブ捨石投入位置検出センサー12、グラブ捨石投入時検出センサー13、コンピュータ14に組み込まれて海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段15、当該海水底堆積捨石マウンド形状を表示する表示器16、流向と流速を計測する必要に応じて使用される流向流速計17などから主に構成されている。
【0011】
また、捨石投入シミュレーション作業支援装置は、作業船1のクレーン2に吊り下げられたグラブ3から海底や水底などの海水底地盤上に捨石4を投入して海水底地盤上に捨石4のマウンド5を形成する捨石投入作業において、投入作業の前にシミュレーションを行う場合に使用される装置である。投入作業の前にシミュレーションを行うことにより、捨石4の投入回数に対応した海水底堆積捨石マウンド形状を事前に予測することが可能となり、実際の捨石投入作業計画が行い易くなる利点がある。捨石投入シミュレーション作業支援装置は、上記の捨石投入作業支援装置で使用される機器の一部の海水底堆積捨石マウンド形状推定手段15と表示手段16が必須であり、これ以外の機器も上記捨石投入作業支援装置で使用される機器が一部利用される。
【0012】
船位検出センサー11は、作業船1の位置をGPS測位で求める機器で、作業船1の位置の特定が図られる。船位検出センサー11には例えばDGPS(ビーコン付)や精度の高いRTK−GPSが使用される。DGPSやRTK−GPSにより作業船の位置の演算を行い、作業船1からの投入位置へのグラブ誘導支援と投入位置の確定を行う。特にRTK−GPSの場合には、陸上に別途GPS基準局を設置して補正情報を取得する必要があるが、このGPS基準局を利用することにより、位置機械精度はlcm+2ppmとなり、位置精度は向上する。RTK−GPS受信機の設置はグラブ運転室6内に運転に支障とならないよう配置する。使用する作業船1の電源が不安定な場合にはUPS等設置する。
【0013】
この船位検出センサー11のアンテナ11aは作業船1のグラブ運転室6側の直上に取り付けられている。アンテナ11aの取り付けは、機械室中央の障害物の無い十分な空間のある位置に設置する必要がある。設置前にGPS情報の取得が可能かを確認する。場合によっては、支柱を立ててアンテナ位置を高くする等も必要となる。
【0014】
グラブ捨石投入位置検出センサー12は、捨石投入位置のグラブ位置をGPS測位で求める機器で、グラブ誘導支援、捨石4の投入位置の確定が図られる。グラブ捨石投入位置検出センサー12には例えばDGPS(ビーコン付)や精度の高いRTK−GPSが使用される。DGPSやRTK−GPSにより捨石投入位置の演算を行い、投入位置へのグラブ誘導支援と投入位置の確定を行う。特にRTK−GPSの場合には、陸上に別途GPS基準局を設置して補正情報を取得する必要があるが、このGPS基準局を利用することにより、位置機械精度はlcm+2ppmとなり、位置精度は向上する。RTK−GPS受信機の設置はグラブ運転室6内に運転に支障とならないよう配置する。使用する作業船1の電源が不安定な場合にはUPS等設置する。
【0015】
このグラブ捨石投入位置検出センサー12のアンテナ12aは捨石4を掴むグラブ3を吊り下げる作業船1のクレーン2のジブ先端に取り付けられている。アンテナ12aの取り付けは、アンテナ上面が常に天頂方向を向くように可動式の受け台を設置して、この受け台上にアンテナを取り付ける。なおこの受け台は、クレーン2の旋回により極度に振ら付かない構造とすることが必要である。
【0016】
このグラブ捨石投入位置検出センサー12は捨石投入シミュレーション作業支援装置においても利用されることがあり、グラブ捨石投入位置検出センサー12を利用する場合には捨石投入位置のグラブ位置の入力作業が省略できる。
【0017】
グラブ捨石投入時検出センサー13は、グラブ3による捨石4の投入の有無を確認してコンピュータ14としての例えばパソコンに情報信号を送るため、グラブ運転室6のグラブ開閉レバーの開位置に当るレバー側面に取り付けられている。グラブ捨石投入時検出センサー13には例えば近接スイッチが使用されている。
【0018】
海水底堆積捨石マウンド形状推定手段15は、グラブ捨石投入時検出センサー13からの投入時情報に基づいてグラブによる捨石投入毎に捨石投入条件からガウス分布に基づき捨石マウンド5の形状を演算し上記グラブ捨石投入位置検出センサー12からのグラブ位置情報と入力された海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定するもので、コンピュータ14にソフトとして組み込まれている。コンピュータ14には例えばパソコンが使用される。パソコンは作業船1のグラブ運転室6に持ち込まれて使用される。
【0019】
本願の発明者は、種々の実験により、水底や海底に投入された捨石4の海水底堆積捨石マウンド形状がガウス分布の式を用いて、平面へ投石した場合のマウンド5の形状が表現できることが分かった(図4参照)。
レーザーで計測した面データを、次式で表されるガウス分布で近似してこの式に現れるピーク高さ、分散、ピークのずれを、各実験ケースで求め、水深、波高などのパラメータに対する傾向を把握する。
Z(x,y)=H0×EXP(−((x−x0)2十(y−y0)2)/2/σ2)
Z(x,y):投入位置をx=y=0とした場合の海水底からの面の高さ
x0 :ピークの流方向のずれ
y0 :ピークの流方向と直角方向のずれ
H0 :ピーク値
σ :分散
なお、x0,y0は実測データZ(x、y)の値から次式で求める。但し今回の実験では、潮流試験のx0以外は実験上の誤差として計算上求まる数値である。
x0=Σ{x×Z(x,y)}÷N(計測データ数)
y0=Σ{y×Z(x,y)}÷N(計測データ数)
H0、σは、実測値Z(x,y)とガウス面高さH(x、y)の差の2乗和が最小となる組み合わせとして求める。
誤差の2乗和=Σ(H(x,y)−Z(x,y))2
ピーク値(H0),ピークの流方向ずれ(x0),分散(σ)の推定
求めたH0,x0,σと水深、捨石比重などのパラメータとの関係をもとに、与えられた水深、捨石比重などの捨石条件に対するH0,x0,σを求め、マウンド形状を予測する。
このような水深、比重、波高、流速、投石回数など多数の影響因子によって決まる値を求める補間手法として多変量解析法を用いる。
【0020】
多変量解析等の考え方
(1)多変量解析
ある物理量が複数の変数で表される場合、実測変数とそれに対する実測物理量のデータベースをもとに、任意の変数に対する未知の物理量を予測する手法である。
変数が1個の場合、一次式を用いた最小自乗法がよく知られているが、それは未知量をyi、変数をxi、とし、未知量に対する予測式を(但し、Yiはyiの予測値である。)下の式(1)のように表し、実測と予測値との差の2乗、すなわち、(yi−Yi)2が最小となるaとbを求めることである。
Yi=a+bxi (1)
変数が複数個になった場合に於いても、上記の変数が1個の場合と同様にして、複数の変数の一次式で予測式を表し実測と予測値の差の2乗が最小となるように、予測式中の係数を求める。
今回はガウス近似式のマウンド高さH0,分散σ、マウンド中心位置のずれx0のおのおのに対して(2)の形で表現された式が3個できる。(1)式のxiに相当する変数は、(2)式ではξ,η,ζ,u,v,wの6種類で、水深、比重、1回投入量、グラブ開度、潮流、波高である。a,b,c,d,e,f、gは偏回帰係数と呼ばれ、実験データから得られる統計的な数値で表現された6×6の連立一次方程式から求められる。
Y=aξ+bη+cζ+du+ev+fw+g (2)
この式のa,b,c,d,e,f,gの偏回帰係数が求まれば、任意の変数ξ,η,ζ,u,v,wに対するマウンド高さH0、分散σ、マウンド中心位置のずれx0が求まる。
(2)ガウス分布近似
実験結果の面データの近似式としてガウスの式を用いた理由として以下は通りである。今回実験を行った投石の散乱現象は、流体的な乱れに起因するランダムな現象であるが、特定の値や場所の周りにランダムに分布する現象の確率はガウス分布で近似されることが多い。下図に基本状態の中央断面(x,y)の実測データ、ガウス分布近似、2次式近似(頂点一致させた場合と最小自乗近似)の比較を示す。
(図5(A)(B)参照)
頂点付近の一致が他の方法より良好である。また、今回のデータは主マウンドのみであるが、実際は主マウンドの外に散乱した石が存在している、この散乱石は投石回数を重ねることで山の裾野を形成するが、その表現ができるのがガウス分布の特徴でもある。
【0021】
捨石模型実験を行うことにより、実験条件を数種類変えて捨石投入における捨石の挙動を確認、把握することができた。特に波高の影響が少ない事、潮流に対してはその強さに応じて流されるが、広範囲にわたってばらばらになることなく潮流が無い場合とほぼ同じような堆積状態となり、当初の予測と異なっていた事、捨石の落下高さが影響すること、捨石比重の影響が無い事等現時点まで未解明であったグラブによる捨石投入時の投石メカニズムの貴重な知見が得られた。
そして、この模型実験結果をもとにガウス分布式を用いたシミュレーション計算を行い、モデル化により投石したマウンド形状をグラフィック化し、リアルにかつリアルタイムに予測するシミュレーション技術の捨石投入作業への応用の可能性が得られた。
【0022】
海水底堆積捨石マウンド形状推定手段15が捨石投入作業支援装置又は捨石投入シミュレーション作業支援装置に使用される場合に、ガウス分布の捨石投入条件は上記の実験結果から分かったように、水深、グラブ3の捨石掴み容量、潮流速、潮流向である。上記したように、波高の影響が少ないこと、捨石の比重の影響がないことが分かり、これらはガウス分布の捨石投入条件に入れなくてよいことになった。
【0023】
海水底堆積捨石マウンド形状推定手段15では、海水底を直交するX方向とY方向とにメッシュ状に分割し、海水底堆積捨石マウンド形状を分割されたメッシュ状で平面コンタ図、叉中央の縦横断面図、色分けメッシュ図で表示させる。縦横のメッシュの間隔としては例えば5m間隔である。
【0024】
コンピュータ14としての例えばパソコンの海水底堆積捨石マウンド形状推定手段15で利用される海水底地形情報は、別途の深浅測量システムにより計測された海底や水底の地盤地形の情報が入力されて使用される。
【0025】
表示器16は、コンピュータ14としての例えばパソコンの海水底堆積捨石マウンド形状推定手段15で求められた海水底堆積捨石マウンド形状や作業船位置を例えばパソコン画面に画像として表示するもので、コンピュータ14のディスプレーなどがこれに該当するが、海水底堆積捨石マウンド形状推定手段15で求められた海水底堆積捨石マウンド形状や作業船位置をプリンタで出力する場合にはプリンタがこれに該当する。
【0026】
流向流速計17は、潮流の影響にともなう捨石4の投入位置の補正を行うために、流向と流速を計測する機器で、例えばデジタル流向流速計が使用される。機種はグラブ運転室6に設置するパソコンにデータをリアルタイムに出力できる仕様のものを選定する。
【0027】
流速計のセンサー部分は作業船1の捨石投入側の船首舷側に取り付ける。方向舵の付いた機種の場合、舷側より30cm程度オーバーハングするような支柱を設け、船底下まで吊り下げる。本体部は防滴ケースに入れて甲板上に固定し、データケーブルを余裕を持たせてグラブ運転室6のパソコンに接続する。流向流速計17は簡易計測の場合には省略されることもある。
【0028】
また、上記以外の機器が必要に応じて作業船1に設置されることにより、機能の拡張が図られる。コンピュータ14としての施工管理用主パソコン14aはグラブ運転室6が狭い場合には、B5サイズのノート型パソコンで十分対応できる。グラブ運転者の見やすい場所に設置して固縛する。周囲の光源により画面が見にくい場合には、画面周辺をボール紙等でオーニングして対応する。
【0029】
GPS補正情報受信用無線機18は、陸上に設置する図示しないGPS基準局からの補正情報を作業船1側で受信し位置補正の演算に使用するもので、GPS受信機同様グラブ運転室6内に配置することが望ましい。
【0030】
施工情報送信用無線機19は、グラブ運転室6に設置したグラブ操作者が見るコンピュータ14のパソコン画面の施工管理画面と同じ画面を、作業船1の操船室7等の離れた位置でも見られるように情報を送信するもので、グラブ運転室6の適当な位置に設置する。
【0031】
GPS補正情報受信用無線機アンテナ18aは無指向性のものを使用し、陸上に設置する図示しない補正情報送信用無線機アンテナの方向に向くようにグラブ運転室6側の適当な位置に設置する。出来る限り高い位置への設置が望ましい。
【0032】
施工情報送信用無線機アンテナ19aは無指向性のものを使用し、作業船1の操船室7側に設置する施工情報受信用無線機アンテナ20aの方向に向くようにグラブ運転室6側の適当な位置に設置する。施工情報受信用無線機アンテナ20aは指向性とするため、出来る限り同じ高さの位置で、グラブ旋回途中でも両アンテナが向き合える位置が良い。
【0033】
施工管理用補パソコン14bは、グラブ運転室6に設置したグラブ操作者が見る施工管理用主パソコン14aのパソコン画面の施工管理画面と同じ画面を、作業船1の操船室7等の離れた位置でも見られるようにするもので、操船室7内に設置する。周囲の光源により画面が見にくい場合には、画面周辺をボール紙等でオーニングして対応する。室が狭い場合には、B5サイズのノート型パソコンで十分対応できる。なお船内電源が極端に不安定な場合には、UPS等を設置する。
【0034】
施工情報受信用無線機20は、グラブ運転室6側に設置した施工情報送信用無線機19から伝送された情報を操船室7側で受信するもので、操船室7内に設置する。
【0035】
施工情報受信用無線機用アンテナ20aは指向性のものとし、施工情報受信用無線機20の付近で操船室7前面の窓ガラスの内側に、グラブ運転室6側に設置する施工情報送信用無線機アンテナ19aの方向を向くように設置する。通常船舶の窓ガラスであれば、電波はガラスを貫通して受信できる。グラブ旋回途中でも両アンテナが向き合える位置が良い。なお、防水型のアンテナであれば操船室7上に設置しても良い。
【0036】
次に、上記発明を実施するための最良の形態の構成に基づくコンピュータ14としての例えばパソコンを使用しての捨石投入作業のプログラム操作は次のようにして行われる。
【0037】
プログラム操作
本プログラムでは、機能を縮小して初期設定を容易にした「簡易設定版」と事前シミュレーションや表示画面の詳細設定などの機能を搭載した「詳細設定版」で構成されており、メインメニュー画面にて選択できるようにしている。
詳細設定版を使用する場合にはプログラム起動時の画面で、「詳細設定」のボタンをクリックする。すると、「詳細設定モード」のメニュー画面に切り替わる。次回からは、この画面が「メインメニュー」となり、「簡易設定モード」に戻る場合には、「簡易設定」のボタンをクリックする。
【0038】
(1)メインメニュー
プログラム起動時、各モード実行後はメニューウィンドウが表示される。
「詳細設定モード」には例えば次のような主な機能がある。
“区画設定”は、施工区域の座標系、施工区画の登録、を行う。
“深度設定”は、施工区域の原地盤の深度を登録する。
“船形状設定”は、施工する船の寸法、センサー取り付け位置等の船に関する情報の登録、管理を行う。
“シミュレーション”は、施工条件の指定により投入時の結果として地盤形状の変化をあらかじめシミュレーションし、施工時の投入位置、回数などの指標を示す。
“船位誘導”は、目標の施エポイントまで船をリアルタイムで誘導する。
“施工管理”は、施工時の船位、バケット位置等をリアルタイムで計測し、グラフィックモニタする。投入された捨石のマウンド形状をシミュレーションして平面図、縦横断図としてリアルタイムに色分け表示する。
“モニタ”は本システムに接続されている全てのセンサーのデータ値をモニタし、計測値のチェックを行う。
“施工管理図”は、施工管理される地盤高データの管理テーブルを表形式、図形式で表示し異常値等のチェックを行う。また、各管理深度の深度情報を色分け図、横断、縦断図と表示し、結果をプリンタに出力する。
“日報”は、日付毎の投入作業を日報の形式で出力する。
【0039】
(2)区画設定
メニューより“区画設定”のクリックで以下の様なウィンドウが表示される。
区画情報の設定は以下の4個のタグで管理される。
座標系:国家座標系番号、ローカル座標系の設定、GPS変換パラメータの設定
区画:施工区画(法線、区域、メッシュピッチ等々)
マーク線:施エアリア周辺の目印となる様なマークを線で表示する機能
マーク点:施エアリア周辺の目印となる様なマークを点で表示する機能
1)座標系の設定
「座標系」のタグをクリックする。
a)国家座標系の指定
国家座標系の窓をクリックして、現在地の座標系を選択する。平面直交座標系No,1〜19の指定となる。
b)ローカル座標系の設定
現場の施工区画を設定する際に、施工現場でローカル座標を採用する場合に、ローカル座標の原点座標を国家座標値で入力する。ローカル座標の原点位置はどこでも構わないが、施工区画の法線上に設けると施工区画を設定する際に便利である。
ローカル座標系を設定する場合はローカル座標系原点の国家座標値(x,y,z)とローカル座標系の回転角(北を0度で時計回り)を設定する。
c)GPSパラメータの設定
ここではJGD2000にクリックしてチェックを入れる。
この座標系は、現場で使用する座標系に合わせる。
d)補正値の設定
Tkyodatum旧、新およびJGD2000を採用した場合に、現場の座標が合わない場合に補正値を入力するが、一般的には入力の必要はない。
GPS測位結果の補正係数(x、y、z、θ)の設定
注)補正処理はローカル座標系の処理と同処理である。
ローカル座標系は国家座標系の他に現場特有(ローカル)の座標系を使用している場合の、ローカル座表系原点の国家座標値とローカル座標系の国家座標系からの回転角を登録する。
e)通信
RTK−GPS(D−GPS)2台と投入ボタン(近接スイッチ等)1個の通信条件を設定する。なお設定に際しては、事前に使用する機器の仕様確認が必要である。
・COMポート
データがパソコンのどのポートに入力されるか、窓をクリックして選択設定する。
・プロトコル
通信のボーレート、パリティー、ストップビット、データ長を窓をクリックして選択設定する。
・使用データ
使用データのモードを、窓をクリックして選択設定する。
RTK−GPS使用の場合はモード3、D−GPS使用の場合はモード2とする。
f)「作図更新」ボタンクリック
2)区画
「区画」のタグをクリックすると、施工区画の設定画面となる。
a)区画No設定
区画は10区画入力可能である。区画はメッシュ(格子)で管理される。
b)法線設定
捨石投入の場合、投入区画の周辺に石が広がるため、区画周辺に5m程度広げて区画を設定する。メッシュは法線からの自動割付となるため、法線は広げた原点より区画の最左端をP1,最右端をP2とする。
注)縦方向:法線方向
横方向:法線直角方向
c)法線の色選択
表示色のところを右クリックして、パレットから色選択。
d)法線の線の太さ選択
表示線の窓をクリックして太さ選択。
e)区画ピッチ設定
1メッシュの寸法を入力。
f)メッシュの作成数設定
法線P1からP2を見て、左、右に作成メッシュ数入力。
g)区画の色選択
表示色のところを右クリックして、パレットから色選択。
h)区画線の太さ選択
表示線の窓をクリックして太さ選択。
i)メッシュ番号
縦方向、横方向のメッシュ番号を選択。
j)割付開始
縦方向、横方向のメッシュ番号の割付開始番号を選択。
k)設計レベル入力
石投入設計天端高さおよび法面の法尻高さを入力。断面図に計画線が反映する。
l)法勾配入力
断面図に計画線が反映する。
m)「作図更新」ボタンクリック
投石区域(緑線)に投入すると、法が付くため法尻を考慮して、投石区域4周に5m延長した区域(黒線)を施工区域として設定する。
3)マーク線
マーク線は実際の区画登録、施工には直接関係がないが、登録された区画周辺の目印等のポイントを登録し区画表示と平面図表示時に同じに表示する事により座標の入れ間違いや、表示方向の確認および周辺の注意部分等の表示に役立つ。
「マーク線」のタグをクリックする。
a)線の位置を入力
既設ケーソンやマウンド全体の形状等を描く。
入力ボックスに線の各コーナー点の座標(X,Y)を入力する。
・先ず、入力する座標系を座標系の窓をクリックして選択。
「国家座標系」と「ローカル座標系」を交互に選択できる。通常は「ローカル座標系」が便利である。
・線の座標をローカル原点よりローカル座標で入力。
b)線の色選択
「色」のところを右クリックして、パレットから色選択。
c)線の太さ選択
「線」の窓をクリックして太さ選択。
d)線を結ぶか、結ばないか選択
「結」の各ボタンをクリックしてチェックを入れる。
e)「作図更新」ボタンクリック
入力データの「挿入」「削除」ができる。
「挿入」:「挿入」をクリック後、現在(カーソル位置)の行に新規の行を挿入する。
よろしいですか?Y,Nで選択。
「削除」:「削除」をクリック後、現在(カーソル位置)の行を削除する。
よろしいですか?Y,Nで選択。
4)マーク点
マーク点は実際の区画登録、施工には直接関係がありませんが、登録された区画周辺の目印等のポイントを登録し区画表示と平面図表示時に同じに表示する事により座標の入れ間違いや、表示方向の確認および周辺の注意部分等の表示に役立つ。
「マーク点」のタグをクリックする。
a)マークの位置を入力
旗やブイ、アンカー位置等目印を描く。
入力ボックスにマーク位置点の座標(X,Y)を入力する。
・先ず、入力する座標系を座標系の窓をクリックして選択、
・マーク点の座標を入力。
b)マークの色選択
「色」のところを右クリックして、パレットから色選択。
c)マークのサイズ選択
「サイズ」の窓をクリックしてサイズ入力。(入力数値は8以上)
d)マークの種類選択
「マーク」の窓をクリックしてパレットから形状を選択。
キャラクタは○●◎△▽・・◇◆□■◇◆×※☆★となっている。
e)使用、不要の選択
使用する場合、「使」ボタンをクリックの上、チェックを入れる。
f)「作図更新」ボタンクリック
入力データの「挿入」「削除」ができる。
「挿入」:「挿入」をクリック後、現在(カーソル位置)の行に新規の行を挿入する。
よろしいですか?Y,Nで選択。
「削除」:「削除」をクリック後、現在(カーソル位置)の行を削除する。
よろしいですか?Y,Nで選択。
【0040】
(3)深度設定
「深度」タグをクリック
(A)一定値の場合
a)深度値色分け入力
「色設定」ボタンをクリックすると、深度色分けテーブルが表示される。
深度色分けテーブルの「値」の欄に必要な深度幅の深度を入力する。入力は必ず表の左下から深い順に入力する。さらに追加の場合は右欄に同様に入力する。また出来る限り、細かなピッチで入力する。
テーブルの「値」の位置をクリックして深度を入カ
−17.5,−17.0,−16.5,−16.0,−15.5,−15.0,−14.5のように細かいピッチで入力も可能。
b)深度色分け
深度色分けテーブルの「色」の欄に深度別に色を入力する。
・テーブルの「色」の窓をクリック。
・パレットから色を選択。
・「OK」クリック。
c)深度設定
・「深度データ」窓をクリックし表示する深度を選択。
・「クリア」下の「固定値」の窓をクリックし、設定したい深度を入力。
・「実行ボタン」クリック
現在表示されている深度データを、下記の設定値にする。よろしいですか?Y,N選択。「はい」をクリック。
深度のテーブル表に50cmメッシュにて深度が入力される。
d)「作図更新」ボタンクリック読込完了
e)「戻り」ボタンクリック
なお、「クリア」の中の「データ」にチエックを入れて深浅値を選択して「実行」により、施工外のシミュレーションにて採用する深浅値の選択ができる。
(B)深浅データファイル読み込み(自動読込み)の場合
a)深度値色分け入力
「色設定」ボタンをクリックすると、深度色分けテーブルが表示される。
深度色分けテーブルの「値」の欄に必要な深度幅の深度を入力する。入力は必ず表の左下から深い順に入力する。さらに追加の場合は右欄に同様に入力する。また出来る限り、細かなピッチで入力する。
テーブルの「値」の位置をクリックして深度を入カ
−17.2,−17.0,−16.8,−16.6,−16.4,−16.2,−16.0のように細かいピッチで入力も可能。
b)深度色分け
深度色分けテーブルの「色」の欄に深度別に色を入力する。
・テーブルの「色」の窓をクリック。
・パレットから色を選択。
・「OK」クリック。
c)「深浅記録ファイル読み込み」ボタンクリック
現在の深浅結果と更新する。よろしいですか?Y,N選択。
「はい」をクリック。
d)深浅測量ファイル呼び出し
「ファイル名」のボックス内クリックし、ファイルを呼び出す
e)深浅測量ファイル選択
ファイルを選択してWクリック
f)深浅測量ファイル読み込み
・「データ情報」の項で、深浅測量値の記録方式を選択して、チェックを入れる。
国家座標系またはローカル座標系の選択
・「読み込み方式」の項で、「新規読み込み」か「追加読み込み」かを選択して、チェックを入れる。
・データ順序の項で、深浅測量データファイルのデータ記録の列び順序が「縦、横、高さ」か「横、縦、高さ」かを選択して、チェックを入れる。
g)FULLメッシュの項にチェックを入れる。
h)「読込実行」ボタンクリック
深浅結果データを新規(現在のデータを破棄して)読込ます。よろしいですか?
i)「戻り」ボタンクリック
j)作図更新
「作図更新」ボタンクリック
原地盤データが読み込まれる。
k)「戻り」タブをクリック
【0041】
(4)船形状設定
メニューより“船形状設定”のクリックで以下の様なウィンドウが表示される。
1)形状寸法の設定
船形状設定は本システムを導入する作業船の寸法、GPSアンテナ取り付け位置、クレーン格納ポジションの固定値を事前に設定する。
a)船体寸法
クレーン旋回中心を原点(0,0)とする船内座標で数値手入力する。
b)ジブ先端GPS12a設置位置
クレーン先端の滑車中心を原点(0,0)とし、先端方向+、右方向+とした船内座標で数値手入力する。
c)グラブ運転室側GPS11a設置位置
クレーン旋回中心を原点(0,0)とし、ジブ方向+、右方向+とした船内座標で数値手入力する。
2)石運船
石運船の有無と作業船に対する係留位置を指定する。
a)なし
石運船が作業船に接舷しない場合には、「なし」にチェックを入れる。
b)ケース左
石運船が作業船の左舷に接舷する場合には、「ケース左」にチェックを入れる。
c)ケース右
石運船が作業船の右舷に接舷する場合には、「ケース右」にチェックを入れる。
3)投入判定
投入予定地点にクレーンでグラブを誘導後、グラブを開いて捨石を投入した地点をGPSで計測して位置を確定し、その地点での地形変化をシミュレーションする。この投入を行ったか否かの判定には以下の4通りの方法があり、現場状況により選択できる。選択は、選択項目にチェックを入れる。
a)画面ボタン(手動操作)
画面ボタンは「施工管理」画面にある「投入」ボタンを投入毎に手動でクリックして、投入位置を確定する。センサの取り付けが困難な場合に適し、投入位置確定精度が良い方法である。
b)外部ボタン(手動操作)
外部ボタンは、別途「押しボタン」をパソコンに接続して、投入毎に手動でボタンを押して、投入位置を確定する。センサーの取り付けが困難な場合に適し、投入位置確定精度が良い方法である。「押しボタン」は運転者の膝元で操作できるため、正確性を期すためには簡易で良い方法である。
c)近接SW(自動操作)
近接SWは、グラブ開閉レバーの開の位置に近接スイッチを設置して、パソコンヘの自動信号伝達により投入位置を確定する。物理的にセンサーの取り付けが可能である場合には、投入位置確定精度も良く自動で行え最も良い方法である。
d)座標判断(自動操作)
座標判断は、クレーンが投入目標位置まで旋回してグラブを開いて投入後、戻り旋回を始めたタイミングでGPS計測値の変化を自動で判断して投入位置を確定する。
船自体の揺れ、タイミングのずれ、非投入でも投入したと判断等により、投入位置確定精度はかなり悪くなるが、投入作業の操作性は向上する。荒投入等ある程度精度が要求されない場合、急速施工に適する。
入力が終わったら、「作図更新」ボタンクリック後、いったん「メニューへ戻る」ボタンをクリックしてメニュー画面に戻る。
【0042】
(5)シミュレーション
シミュレーションを行うには、「メニュー」画面の「シミュレーション」ボタンをクリックする。
すると、以下のシミュレーション画面が表示される。
1)捨石投入条件の設定
シミュレーションの条件を設定する。
a)メッシュ
投入位置のメッシュ名を、窓をクリックして選択入力する。
b)シフト
投入位置はメッシュの中心に自動割付されているが、投入位置のシフトがある場合には、シフト量を窓をクリックして法線方向、法線左右方向の順に数値入力する。
c)水深
原地盤の平均水深を、窓をクリックして数値入力する。
d)流向
潮流の方向を数値入力する。
e)流速
潮流の速度をノット換算して、数値入力する。
f)掴み容量
グラブが1回当りに掴む石の容量を入力する。
g)疫入回数
シミュレーションを行う捨石の投入回数を入力する。
なお、この設定値の内c)水深、d)流向、e)流速、f)掴み容量については「施工管理画面」とリンクしており、施工途中で変更したい場合には「施工管理画面」上で設定数値の変更ができる。
2)シミュレーション
a)「クリア」の「深浅値」ボタンをクリックする。
なお、原地盤の深浅値を固定値とする場合には、固定値の窓をクリック後数値入力して、「固定値」ボタンをクリックする。
b)「登録」ボタンをクリックする。
c)「計算実行」ボタンをクリックする。
これにより、シミュレーションが実行される。
なお、「削除」「挿入」ボタンのクリックにより「登録」内容の変更ができ、「戻り」
ボタンのクリックにより、「メニュー」画面に戻る。
【0043】
(6)モニタ
計測に入る前に、設置しているセンサー等の通信状態と入力値が正常か、モニタ画面で確認する。
メニュー画面より「モニタ」ボタンをクリックする。
確認後、「戻り」ボタンをクリックしてメニュー画面に戻る。
【0044】
(7)船位誘導
a)転船目標点設定
メニューより“船位誘導”のクリックで船位誘導ウィンドウが実行される。
この船位誘導ウィンドウ内の“目標点”のクリックで以下の様なウィンドウが表示される。本モードでは転船時の目標位置(位置と入船方位)の設定を行う。位置の指定はメッシュ名の指定と離隔距離、シフト量の指定で行う。
1)投下目標位置
a)投下目標位置の窓をクリックして、投下目標のメッシュ位置の番号を選択する。
b)または、施工区域メッシュの目標位置(2−C)にマウスを合せクリックにより選択される。
2)入船方位
入船方位の項から作業船の船首がメッシュのどの方向から進入するか選択する。
3)離隔距離
作業船の中心(クレーン旋回中心)と投下目標点となるメッシュの中心位置(投下時グラブ位置)との間隔を、「離隔距離」の窓をクリックして数値入力する。この時、作業船の船首方向に対して船首+、船尾−、右舷+、左舷を−として入力。
4)シフト量
投下目標点がメッシュの中心位置(投下時グラブ位置)で無い場合に「シフト量」の前後、左右の窓をクリックして数値入力する。この時、作業船の入船方向に対して左舷を−、右舷を+、前方を+、後方を−として入力。
5)台船とクレーン
通常は作業船の船首を0度として、船尾方向に180度旋回した位置を「クレーン格納」位置とし、これを「ホーム位置」とする。したがって通常は「ホーム」にチェックを入れる。
転船・船位誘導時に、「クレーン格納」位置が「ホーム位置」の位置と異なる場合には、「台船とクレーン」の「旋回」にチェックを入れ、窓をクリックして旋回角度を数値入力して設定する。
6)「実行」ボタンクリック
これで「位置誘導」画面に戻る。
b)船位誘導
メニューより“船位誘導”のクリックでウィンドウが表示される。
船位誘導モードでは現在位置と目標位置が必ず表示されるように自動スケーリングで表示される。
誘導量に関しては船の各隅、目標位置、クレーン旋回位置の各点での誘導量が表示される、小さなウィンドウが表示される。
これらのウィンドウは移動、最小化ができるので、自由な位置で自由なウィンドウを表示する。(次回からは同じ位置、状態で実行される)
GPSの情報としてmode、pdop、svnが表示される。
総合的にはmodeの値3の場合は最も精度が良くなる。
mode=1,2,4の場合はこの部分の表示が赤色となり、精度劣化を知らせる。
誘導が完了して船の位置が定まったら、「終了」ボタンをクリックして「メニュー」画面に戻る。
【0045】
(8)施工管理
1)メニューより“施工管理”のクリックでウィンドウが表示される。
本モードではクレーン先端(グラブ位置)を、クレーンの旋回にもとづきGPS情報によりリアルタイムでモニタする。深度は1升50cmメッシュ毎に色分け表示する。
深度の色分けは、−20m〜−5mの範囲で50cmのピッチで深度毎に事前に色分け設定されているが、「深度設定画面」にて自由に設定できる。
現在のバケットがある位置のメッシュ名が「位置」に、そのメッシュヘの投入回数の累積値が「投入回数」にそれぞれ表示される。
2)「深度設定」画面にて設定した捨石投入条件(掴み容量、流向、流速)を施工中に変更する場合には、この画面の捨石投入条件の各窓をクリックして、数値を入力する。
ここでは変更なしとして、そのままにする。
3)GPSの情報としてmode,pdop,svnが画面右下に表示される。
総合的にはmodeの値が3の場合が最も精度が良くなる。
Mode=1,2,4の場合にはこの表示が赤色となり、精度の劣化を知らせる。また、svnは4以上必要である。
4)グラブで石を掴み、クレーンを旋回して投入地点で投入したら
a)外部投入ボタン設置の場合には、ボタンを押す。
b)外部投入ボタンを設置していない場合には、画面の「投入」ボタンをクリックする。
これにより、石の投入位置を確定しGPS測定座標が記録され、この位置で捨石のシミュレーションが行われ加算される。
5)石が投入(ボタンが押されると)されると画面中央に平面コンタ図、画面左端に縦断面、画面下端に横断面を表示する。投入されたメッシュの表示したい位置をマウスでクリックすることにより、縦断面及び横断面が表示され、クリックされた位置の位置線が表示される。
6)施工が終了したら、「終了」ボタンをクリックしてメニュー画面に戻る。
【0046】
(9)施工管理図
施工終了後、施工管理図画面によりオフラインにて施工状況の確認及び平面図、縦横断図を作成して出力できる。
メニュー画面の「施工管理図」ボタンをクリックする。
1)表示
表示では深度管理テーブルを表、図形式の表示を行う。
表形式では深度色分けとしてセルのバックカラーが色分けされる。
各セルのカーソルの移動が可能で、直接内容を管理できる。
表、図形式の表示の切り替えは、「切替(表/グラフィック)」のクリックで行う。
「表示」をクリックした際に、グラフィックで採用する水深値を詳細設定版では4種類から選択できる。
・設計データ:設計水深値での表示
・深浅データ:深浅測量値での表示
・施エデータ:捨石投入を行った場合のシミュレーション結果表示
・シミュレーション:検討のためのシミュレーションを行った場合の結果表示
したがって、施工時の結果を表示したい場合には「施工データ」を必ず選択する。
a)深度色分け表
b)深度色分けグラフィック
「表示」の中にはファイル選択が2種類ある。
作業終了後「メニュー」より「終了」ボタンをクリックすると、この「表示」の中の「過去のファイル」に個別ファイルが自動保存されている。
・過去のファイル:このファイルは読み込み表示は可能であるが、施エデータとしては更新されず施工日毎の個別ファイルとなっている。後日各施工日毎に確認したい場合には、このファイルから選択する。
・最新のファイル:過去のファイルを選択して読み込むと、一旦最新のファイルとして登録される。このファイルを用いて、過去に行った施工区域で継続して施工を行うことができる。この場合、データは上書きされる。
「出力」の中の「ファイル」は「Graph−R」というグラフィックソフトを用いてコンタ等を作成する際のファイルフォーマットで、通常は使用しない。
2)施工管理図
施工結果の色分け図、断面(横断、縦断)の出力を行う。
施工管理画面の「出力」をクリックすると、画面が表示される。
各出力条件の設定後出力する。
a)色分け図の作成
◇色分け図設定
「出力」クリック後、「色分け図設定」を選択クリックすると色分け図設定ウインドウが表示される。
出力される図表のタイトルとして工事名(20文字2行)、施工者(20文字)、備考(20文字)の設定と色分け図の出力スケール、用紙の指定となる。
工事名、施工者、備考は他の出力(断面図等)と共通の内容となる。
スケール、用紙は色分け図専用の設定内容となる。
◇色分け図の出力
「色分け図設定」後「戻る」で戻り「色分け図」を選択する。
印刷プレビュー機能として画面表示される。
用紙にあたる部分を左クリックで拡大、右クリックで縮小となる。
内容を確認して、プリンタヘ出力する場合は“印刷”をクリックする。
b)縦断面図、横断面図の作成
◇断面(縦断、横断)図の設定
「出力」クリック後、「断面図設定」を選択クリックする。
縦断または横断図の用紙寸法、縮尺、表示軸数、表示位置を選択する。
断面図の出力は縦、横軸毎のスケールの指定となる。
縦(深度)軸のスケールは自動/手動の設定が可能である。
断面図出力では1枚の用紙に軸を4段まで、各軸毎に表示データ数が指定可能である。
工事名、施工者名、備考は色分け図と共通である。
出力データの指定は、縦断図、横断図毎にそれぞれのメッシュ位置で指定する。
指定は出力するメッシュ位置の行のクリックでon(青)/off(白)となる。
出力する軸段数、本数の設定により順次上の行より処理される。
◇縦断図、横断図の出力
「断面図設定」後「戻る」で戻り、「出力」の中の「縦断」または「横断」を選択する。
c)施工管理図の終了
施工管理図作成を終了するには、「戻り」、「表示」、「終了」で「メニュー」画面に戻る。
【0047】
(10)日報
メニューより“日報”のクリックでウィンドウが表示される。
「戻り」で「メニュー」画面に戻る。
【0048】
(11)施エファイルの保存
作業終了後「メニュー」より「終了」ボタンをクリックすることにより、以下の2種類のファイルが自動的に保存される。
1)継続ファイル
このファイルはシステムが常に使用する最終状態(本日施エデータ)のデータで続けて施工する場合にはそのまま上書きされて継続できる。
ファイル名:DepthTable3.csv
2)個別ファイル
このファイルは読み込み表示は可能であるが、施エデータとしては更新されず本日のみの施エデータとして個別にデータが自動保存される。
ファイル名:DT3,年月日,番号,csv
ファイルの保存先は、メニューの施工管理図の中の「表示」の「過去のデータ」に保存される。
【0049】
なお、この発明は上記発明を実施するための最良の形態に限定されるものではなく、この発明の精神を逸脱しない範囲で種々の改変をなし得ることは勿論である。
【実施例】
【0050】
捨石投入作業支援装置による施工例
工事場所:北海道檜山郡瀬棚町(瀬棚港実海域試験)
施工数量:捨石30〜300kg/個 200m3
〔施工結果〕
施工結果を図7(A)〜(D)に示す。捨石施工前原地盤(黒線)に対して、シミュレーションによる投石表示(■)、投石後の深浅測量結果(□)の縦断面図、横断面図を示す。縦断面図において、距離0m〜10mまではすX方向の1列の連続した峰を持つ山、10m〜20mまではY方向の5m間隔で谷を持つ山として、投入している。
【図面の簡単な説明】
【0051】
【図1】この発明を実施するための最良の形態を示す捨石投入作業支援装置による施工概念図である。
【図2】(A)はこの発明を実施するための最良の形態を示す操船室の機器配置の概要平面図である。 (B)はこの発明を実施するための最良の形態を示すグラブ運転室の機器配置の概要平面図である。 (C)はこの発明を実施するための最良の形態を示す作業船の機器配置の概要側面図である。
【図3】(A)はこの発明を実施するための最良の形態を示すグラブ運転室の機器配線図である。 (B)はこの発明を実施するための最良の形態を示す操船室の機器配線図である。
【図4】この発明を実施するための最良の形態を示すガウス分布近似の斜視図である。
【図5】(A)はこの発明を実施するための最良の形態を示す基本状態の中央Y断面におけるガウス分布近似図である。 (B)はこの発明を実施するための最良の形態を示す基本状態の中央X断面におけるガウス分布近似図である。
【図6】この発明を実施するための最良の形態を示す詳細設定版複合ソフトの操作イメージのフロー図である。
【図7】(A)はこの発明の実施例を示す2.5m箇所の縦断図である。 (B)はこの発明の実施例を示す2.5m箇所の横断図である。 (C)はこの発明の実施例を示す7.5m箇所の横断図である。 (D)はこの発明の実施例を示す17.5m箇所の横断図である。
【符号の説明】
【0052】
1 作業船
2 クレーン
3 グラブ
4 捨石
5 マウンド
6 グラブ運転室
7 操船室
11 船位検出センサー
11a アンテナ
12 グラブ捨石投入位置検出センサー
12a アンテナ
13 グラブ捨石投入時検出センサー
14 コンピュータ
14a 施工管理用主パソコン
14b 施工管理用補パソコン
15 海水底堆積捨石マウンド形状推定手段
16 表示器
17 流向流速計
18 GPS補正情報受信用無線機
18a GPS補正情報受信用無線機アンテナ
19 施工情報送信用無線機
19a 施工情報送信用無線機アンテナ
20 施工情報受信用無線機
20a 施工情報受信用無線機用アンテナ
【特許請求の範囲】
【請求項1】
作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入作業において、捨石投入位置のグラブ位置をGPS測位で求めるグラブ捨石投入位置検出センサーと、グラブからの捨石投入時を検出するグラブ捨石投入時検出センサーと、当該グラブ捨石投入時検出センサーからの投入時情報に基づいてグラブによる捨石投入毎に捨石投入条件からガウス分布に基づき捨石マウンドの形状を演算し上記グラブ捨石投入位置検出センサーからのグラブ位置情報と入力された海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段で求められた海水底堆積捨石マウンド形状などを表示する表示器と、を備えたことを特徴とする捨石投入作業支援装置。
【請求項2】
作業船の方位をGPS測位で求める船位検出センサーを備え、海水底堆積捨石マウンド形状推定手段は前記海水底堆積捨石マウンド形状と上記船位検出センサーからの情報により上記作業船位置とを表示器を通じて表示する請求項1記載の捨石投入作業支援装置。
【請求項3】
海水底堆積捨石マウンド形状推定手段はグラブによる捨石投入毎に演算して表示器を通じてその都度表示する請求項1又は請求項2記載の捨石投入作業支援装置。
【請求項4】
作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入シミュレーション作業において、捨石投入条件及び入力された投入回数からガウス分布に基づき捨石マウンドの形状を演算しグラブ位置情報と海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状のシミュレーションをする海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段でシミュレーションした海水底堆積捨石マウンド形状を表示する表示器と、を備えたことを特徴とする捨石投入シミュレーション作業支援装置。
【請求項1】
作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入作業において、捨石投入位置のグラブ位置をGPS測位で求めるグラブ捨石投入位置検出センサーと、グラブからの捨石投入時を検出するグラブ捨石投入時検出センサーと、当該グラブ捨石投入時検出センサーからの投入時情報に基づいてグラブによる捨石投入毎に捨石投入条件からガウス分布に基づき捨石マウンドの形状を演算し上記グラブ捨石投入位置検出センサーからのグラブ位置情報と入力された海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状を演算推定する海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段で求められた海水底堆積捨石マウンド形状などを表示する表示器と、を備えたことを特徴とする捨石投入作業支援装置。
【請求項2】
作業船の方位をGPS測位で求める船位検出センサーを備え、海水底堆積捨石マウンド形状推定手段は前記海水底堆積捨石マウンド形状と上記船位検出センサーからの情報により上記作業船位置とを表示器を通じて表示する請求項1記載の捨石投入作業支援装置。
【請求項3】
海水底堆積捨石マウンド形状推定手段はグラブによる捨石投入毎に演算して表示器を通じてその都度表示する請求項1又は請求項2記載の捨石投入作業支援装置。
【請求項4】
作業船のクレーンに吊り下げられたグラブから海底や水底などの海水底地盤上に捨石を投入して海水底地盤上に捨石のマウンドを形成する捨石投入シミュレーション作業において、捨石投入条件及び入力された投入回数からガウス分布に基づき捨石マウンドの形状を演算しグラブ位置情報と海水底地形情報とから海水底地盤上に堆積形成される海水底堆積捨石マウンド形状のシミュレーションをする海水底堆積捨石マウンド形状推定手段と、当該海水底堆積捨石マウンド形状推定手段でシミュレーションした海水底堆積捨石マウンド形状を表示する表示器と、を備えたことを特徴とする捨石投入シミュレーション作業支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−24400(P2009−24400A)
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願番号】特願2007−188774(P2007−188774)
【出願日】平成19年7月19日(2007.7.19)
【出願人】(505252919)国土交通省北海道開発局長 (3)
【出願人】(595073649)社団法人日本作業船協会 (6)
【Fターム(参考)】
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願日】平成19年7月19日(2007.7.19)
【出願人】(505252919)国土交通省北海道開発局長 (3)
【出願人】(595073649)社団法人日本作業船協会 (6)
【Fターム(参考)】
[ Back to top ]