
掘削システム
掘削システムは、トラクターユニット10に連結された回転可能なドリルパイプ12と、トラクターユニット10に連結されるとともに、トラクターユニット10により移動可能な操縦可能掘削システム18,20,22と、を備えている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、掘削システムに係り、とりわけ、その後に炭化水素を抽出するためのボアホール(bore hole)の形成において使用するための掘削システムに関する。
【背景技術】
【0002】
ボアホールの形成において典型的に使用される、操縦可能な掘削システムの一形態は、バイアスユニットを搬送するドリルストリング(drill string)すなわちドリルパイプ(drill pipe)を備えている。バイアスユニットは、ボアホールの隣接部分に対して所望の偏位でドリルパイプを保持するよう動作可能なものである。ドリルパイプは、さらに典型的には、回転のためのドリルビット(drill bit)を駆動するよう構成されたダウンホールモーター(down hole motor)を搬送する。バイアスユニットおよびモーターは、典型的には、ドリルパイプに沿った圧力下で供給される掘削流体(drilling fluid)すなわちマッド(mud)を利用して、油圧式に駆動される。
【0003】
使用中、ビット荷重(WOB)負荷が、ドリルパイプを介してビットに加えられる。ビット荷重(WOB)負荷は、ビットの回転との組合せにより、ボアホールの端部からビットが物質を掘り、掻き出し、または侵食し、これによってボアホールの長さを増大させるのに役立つ。
【0004】
バイアスユニットの作用は、ボアホールが所望の経路に沿って掘削されるようドリルビットを操縦するために利用され得る。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、掘削システムのその他の形態を提供することである。
【発明を解決するための手段】
【0006】
本発明によれば、トラクターユニットに連結される、回転可能なドリルパイプと、トラクターユニットに連結されるとともに、トラクターユニットによって移動可能な操縦可能掘削システムと、を備えた掘削システムが提供される。
【0007】
そのような構成は、使用中、望まれれば、ドリルパイプが連続的に回転され得るようになっており、これによって、ドリルパイプが動けなくなるリスクを低減し、一方、トラクターユニットが、操縦可能掘削システムのための安定なプラットフォームを提供する。
【0008】
操縦可能掘削システムは、好都合には、ダウンホールモーターを含んでいる。
【0009】
トラクターユニットを備えることは、ドリルパイプと操縦可能掘削システムとの間における運動および力の伝達を制限または制御するのに役立つ。とりわけ、トラクターユニットは、負荷をドリルパイプに伝達するよりもむしろ、モーターの作動により生成されるトルクに反発する。同様に、ビットにより誘起される反作用のトルクは、ドリルパイプに伝達されず、その振動を低減させる。
【0010】
トラクターユニットおよび操縦可能掘削システムは、例えばドリルパイプを介して供給される流体を用いることにより、油圧式に動力が供給されてもよい。若しくは、または付加的に、ドリルパイプの回転および/またはドリルパイプで伝達されるWOB負荷が、これらの構成要素に動力を供給するのに用いられてもよい。さらに、それらは、電気的に動力が供給されてもよい。トラクターユニットおよび操縦可能掘削システムが、同一の動力源を用いる必要はない。
【0011】
トラクターユニットは、エネルギー変換装置、例えば、その運動を油圧エネルギーに変換する、またはその逆の変換を行う装置を含んでいてもよい。そのような装置は、地表またはダウンホールに配置される制御ユニットにより自動で制御されてもよく、または、手動で制御されてもよい。
【0012】
掘削中の計測を可能にするため、センサーが、トラクターユニット、または、ドリルパイプとドリルビットの間のその他の位置に設けられてもよい。例えば、ボアホールの形状および直径、ボアホールの安定性パラメータを表示するため、および、掘削の計測の間の圧力を提供するため、トラクターユニットとボアホール壁との間の係合部が使用されてもよい。
【図面の簡単な説明】
【0013】
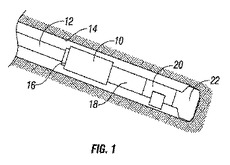
【図1】図1は、本発明の形態による掘削システムの一部の概略図である。
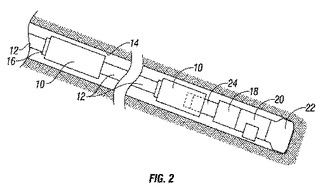
【図2】図2は、その他の形態を示す、図1と同様の図である。
【発明を実施するための形態】
【0014】
本発明は、付随する図を参照することにより、例示的な方法で、さらに説明される。
【0015】
図1に示される掘削システムは、ドリルパイプ12の下端部に連結されるトラクターユニット10を備えている。ドリルパイプ12は、ボアホール14の長さに沿って地表まで延びている。ドリルパイプ12は、使用中に地表から回転されるように構成されている。またドリルパイプ12は、圧力下で掘削流体すなわちマッドが供給されるように構成されている。典型的には、ドリルパイプ12は、動けなくなるのを避けるため、ゆっくりと回転される。
【0016】
ドリルパイプ12は、所定の範囲の形態をとることができる。例えば、ドリルパイプ12は、らせん状の管形材料またはその他の配管器具を含むことができる。
【0017】
トラクターユニット10は、連結用装置16を有しており、これによって、ドリルパイプ12がトラクターユニット10へ案内される。連結用装置16は、ドリルパイプ12を介してトラクターユニット10にマッドが供給されるのを可能にするよう構成される。連結用装置16は、さらに、通常使用中にはドリルパイプ12の回転がトラクターユニット10には伝達されず、しかし望まれる場合には、その動作モードが、トラクターユニット10をドリルパイプ12とともに回転させ、または、ドリルパイプ12よりも低い速度で回転させるよう切り替えられるよう、構成されている。好都合には、ドリルパイプとトラクターユニットとの間の相対的な動きをモニターするとともに、この情報を蓄積して、そしてこの情報を制御ユニットに伝達するセンサーが動作可能となっている。この場合、制御ユニットは、例えば、望まれない運動または振動を減衰させるようシステムの動作を制御するために使用され得る。
【0018】
ドリルパイプ12がトラクターユニット10から独立して回転するのを可能にすることにより、ドリルパイプ12は、望まれるのであれば、連続的に回転され得る。このことは、ドリルパイプ12が動かなくなるリスクを低減する。さらに、ドリルパイプ12の回転は、ボアホールに沿って通る流体を撹拌するよう使用され得る。これによって、ボアホール内において、掘削されたものの蓄積を低減することができる。連結用装置16は、独立した回転を可能にするが、しかしながら、例えば、トラクターユニット10が所定位置で渋滞し、またはトラップされるようになった場合にトラクターユニット10の開放を手助けするため、ドリルパイプ12がトラクター10へトルクを加えるべく使用され得るよう、連結用装置16がロック可能であることが好ましい。システムは、好ましくは、電源異常のイベントのときにこの設定に戻るよう構成される。
【0019】
トラクターユニット10は、好都合にはマッドで動力が供給されるモーターの形態によるダウンホールモーター18を支持する。マッドで動力が供給されるモーター18の出力は、操縦制御ユニット20に伝達される。この操縦制御ユニット20は、ドリルビット22に連結されている。使用中、モーター18の作動が、ドリルビット22を回転させ、操縦制御ユニット20が、ドリルビット22によりとられている向きまたは姿勢を制御し、これによって、使用中に、ボアホールが伸ばされる方向を制御することが理解されるであろう。
【0020】
ドリルパイプ12を、モーター18、操縦制御ユニット20およびドリルビット22を支持し、またこれらに負荷を加えるために使用するよりもむしろ、トラクターユニット10が、モーター18、操縦制御ユニット20およびドリルビット22を支持するとともに、以下に説明されるように、ドリルビット22にビット荷重(WOB)負荷を加えるために使用され得る。このため、ドリルパイプ12は、その自重を支持し、加えられた流体圧力に耐え、そして、トラクターユニット10を引っ張るのに使用される場合に加えられた負荷を運搬するよう、十分に強くなっている通常のドリルパイプに比べて、より薄い壁で仕切られていてもよく、また、より増大された直径からなっていてもよい。
【0021】
ビット22の回転速度を増大させるため、ギヤボックスが設けられていてもよい。流体連結または遊星ギヤボックスまたは等速ギヤボックスが、トルクおよび回転速度、従ってビット22へのパワーを調整するために設けられていてもよい。
【0022】
トラクターユニット10は、ボアホール14の壁をとらえ、そして、内部の牽引システムによってボアホール14の長さに沿って移動可能となっている。牽引システムは、しゃくとり虫に基づいており、若しくは、軌道(track)、ホイール、差動ピストン、回転する環状面(rolling toroid)またはスクリュー式に作動される装置を備えていてもよい。さらに、これらの技術の任意の組合せが、ボアホール14に対する移動のためにトラクターユニット10を駆動するのに使用され得る。トラクターユニット10の牽引システムの動作は、使用中、WOB負荷をドリルビット22に加えるのに使用され得るということ、および、ドリルビット22の回転と組み合わせてのWOB負荷の適用は、ドリルビット22がボアホール14の端部から物質を掻き出し、侵食し、または掘ることを引き起こし、これによって、操縦ユニット20により制御される方向におけるボアホール14の軸方向の長さを増大させるまたは伸ばすということが理解されるであろう。トラクターユニット10は、制御システムに含まれるルールに従って、ビットの前進を制御する。ルールは、ビットのタイプ、地質の特徴、掘削およびボアホールの状態、およびマッドシステムを考慮して選択され得る。またルールは、適切なセンサーから導かれる情報に応じて働くよう選択され得る。ユニット10は、さらに、ビット22の侵入速度を制御し、また、モーター18の動作を制御することにより回転速度を制御する。ドリルビット22により取り除かれる物質は、典型的には、ドリルパイプ12とボアホール14の壁との間に画定される環状の通路に沿って地表に向かって移動する掘削流体すなわちマッドの戻り流によってボアホール14の下端から押し流される。
【0023】
トラクターユニット10の牽引システムと組み合わせて連結装置16を備えることは、ドリルパイプ12よりもむしろ地質に対して伝達される、モーターおよびビットにより誘起される反作用力を生じさせ、ドリルパイプ12の振動を低減させる。
【0024】
マッドで活性化され、軸方向に延びるピストン24(図2参照)は、WOB負荷を制御し、および、WOB負荷をビット22に加えるため、および/または、モーター18、操縦制御ユニット20およびドリルビット22を軸方向の振動から切り離すため、トラクターユニット10上に設けられてもよい。軸方向の振動は、例えば、ドリルパイプ12において生じうるものであり、WOB負荷を加えるため利用されるものである。ピストン24は、ダウンホールまたは地表に配置されたコンピュータにより適切なセンサーの出力を用いて制御される、ダウンホールに配置された釣り合いバルブを用いて制御されてもよい。そのような構成において、トラクターユニット10の牽引システムは、ピストン24により加えられる負荷に反発する。
【0025】
トラクターユニット10により全体的に、または、ピストン24などにより、または、これらの影響の組合せとしてWOB負荷が加えられる場合、加えられるWOB負荷の大きさは、好都合には、全体的な掘削速度、石盤のタイプ、ビットの設計、支配的な衝撃および振動の状態、およびビットの振動などの要因を考慮する制御アルゴリズムからの出力に応じて制御される。
【0026】
モーター18および操縦制御ユニット20を備えるトラクターユニット10および操縦可能な掘削システムのための主要な動力源は、ドリルパイプ12を介して運ばれるマッドの供給を用いて油圧式に得られる、ということが考えられる。電気的な動力が、タービンを駆動し、また電気発電機を駆動するためのマッドの供給を利用することにより生成されてもよい。しかしながら、その他の駆動技術が利用されてもよいことが理解されるであろう。例えば、トラクターユニット10に対するドリルパイプ12の回転は、電気発電機を駆動するための、または油圧式の動力を加えるダウンホール流体を加圧するマッドモーターを駆動するための相対的な回転を利用することにより、電気的なエネルギーまたは油圧式のエネルギーに変換され得る。発電機の動作を制御することにより、ドリルパイプのねじり荷重が、制御され、また望まれるのであれば地表へ信号を伝達するために使用され得る。望まれるのであれば、この効果を高めるため、ドリルパイプの下端を積極的に駆動することも可能である。若しくは、ドリルパイプ12により加えられるビット荷重負荷が、動力を供給するために利用されてもよい。さらなる変形は、電気ケーブルでつながれたドリルパイプ、または、高電流伝導体を運搬することができる複合管材を介して、電気的な動力を供給することである。もちろん、これらの技術の組合せも利用され得る。エネルギー変換システムが設けられている場合、変換システムは、ダウンホールに配置されたコントローラー、または地表に配置されたコントローラーを介して自動的に制御され得る。さらに、変換システムは、地表に位置するオペレータにより、部分的にまたは全体的に手動で制御されてもよい。
【0027】
前述のように、トラクターユニット10は、ボアホール14の長さに沿って駆動され得る。またトラクターユニット10は、ボアホール14の内側の所望の位置における運動に対して保持され得る。また、トラクターユニット10は、WOB負荷をドリルビット22に加えるよう利用され得る。トラクターユニット10の牽引システムは、さらに、ボアホール14に対する回転運動に対してトラクターユニット10を固定するよう利用されてもよい。ボアホール14に対するトラクターユニット10の軸方向位置をモニターすることは、ドリルビット22の位置の表示を提供するよう利用され得る、ということが理解されるであろう。さらに、ボアホール14の壁にトラクターユニット20が係合するのをモニターすることにより、ボアホール14の直径および形状がモニターされ、また、掘削測定の間の圧力が形成され得る。マッドの固まり(mud cake)のひずみが、ボアホール14のための安定性パラメータを決定するために利用され得る。
【0028】
上述のように、掘削流体すなわちマッドの戻り流は、ドリルビット22により取り除かれた物質を洗い流すために利用され得る。望まれるのであれば、トラクターユニット10が、ボアホール14の壁とともに圧力シールを形成し、戻り流を遮蔽してもよい。そのような環境における戻り流を制御するため、トラクターユニット10において、通路およびバルブが設けられてもよい。
【0029】
操縦可能掘削システムは、形態における所定の範囲をとることができる。例えば、操縦制御ユニット20は、所望の方向で横向きに作用する負荷をドリルビット22に対して加えて、それを所望の方向へと駆り立てるよう動作可能なバイアスユニットを備えていてもよい。また、操縦制御ユニット22は、曲げられたハウジング(bent housing)と、ドリルビット22を所望の方向に向けるため、曲げられたハウジングを所望の方向に配向させるよう動作可能な機械と、を含むことができる。その他のシステムも可能である。例えば、非回転の摺動スリーブの回転操縦可能なシステムが用いられてもよく、または、プッシュザビット(push the bit), ポイントザビット(point the bit), または組合せの操縦原理を含む操縦掘削システムが利用され得る。
【0030】
ドリルビット22は、形態における所定の範囲をとることができる。例えば、ドリルビット22は、従来の回転ドラッグタイプのドリルビットを備えていてもよい。しかしながら、その他の形態のビットも利用され得る。
【0031】
ワイヤで接続されたドリルパイプシステムが、地表とトラクターユニット10との間でのデータ通信を可能とするよう利用されてもよい。そのようなシステムはまた、若しくは代替として、上述のように電気的なパワーをトラクターユニット10に供給するために利用され得る。
【0032】
拡張された範囲での応用における制御をアシストするためのドリルパイプ(図2参照)の長さに沿って、1つまたはそれ以上のさらなる類似のトラクターユニットを含むことが望まれてもよい。トラクターユニットは、好ましくは所要の通信速度を実現するようワイヤで接続されたドリルパイプを用いて、好ましくは一斉に制御される。これによって、先に概説された利点を実現することができる。
【0033】
要約すれば、トラクターユニット10は、掘削および操縦のための安定なベースを提供する。従って、より高いレベルのROPが達成され、また、操縦がより正確に制御され得る。ROPの改善は、ビット22のWOB、トルクおよび回転速度に関する改善された制御から生じる増大された即座のスピードの結果として、直接的なものであり、また、より安定でないプラットフォームからの掘削により引き起こされる問題から回復するときの中断時間を、避けるまたは低減することによる。
【0034】
本発明の範囲から逸脱することなく、ここに記載された構成に対する、広い範囲における修正および変形がなされ得ることが理解されるであろう。
【技術分野】
【0001】
本発明は、掘削システムに係り、とりわけ、その後に炭化水素を抽出するためのボアホール(bore hole)の形成において使用するための掘削システムに関する。
【背景技術】
【0002】
ボアホールの形成において典型的に使用される、操縦可能な掘削システムの一形態は、バイアスユニットを搬送するドリルストリング(drill string)すなわちドリルパイプ(drill pipe)を備えている。バイアスユニットは、ボアホールの隣接部分に対して所望の偏位でドリルパイプを保持するよう動作可能なものである。ドリルパイプは、さらに典型的には、回転のためのドリルビット(drill bit)を駆動するよう構成されたダウンホールモーター(down hole motor)を搬送する。バイアスユニットおよびモーターは、典型的には、ドリルパイプに沿った圧力下で供給される掘削流体(drilling fluid)すなわちマッド(mud)を利用して、油圧式に駆動される。
【0003】
使用中、ビット荷重(WOB)負荷が、ドリルパイプを介してビットに加えられる。ビット荷重(WOB)負荷は、ビットの回転との組合せにより、ボアホールの端部からビットが物質を掘り、掻き出し、または侵食し、これによってボアホールの長さを増大させるのに役立つ。
【0004】
バイアスユニットの作用は、ボアホールが所望の経路に沿って掘削されるようドリルビットを操縦するために利用され得る。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、掘削システムのその他の形態を提供することである。
【発明を解決するための手段】
【0006】
本発明によれば、トラクターユニットに連結される、回転可能なドリルパイプと、トラクターユニットに連結されるとともに、トラクターユニットによって移動可能な操縦可能掘削システムと、を備えた掘削システムが提供される。
【0007】
そのような構成は、使用中、望まれれば、ドリルパイプが連続的に回転され得るようになっており、これによって、ドリルパイプが動けなくなるリスクを低減し、一方、トラクターユニットが、操縦可能掘削システムのための安定なプラットフォームを提供する。
【0008】
操縦可能掘削システムは、好都合には、ダウンホールモーターを含んでいる。
【0009】
トラクターユニットを備えることは、ドリルパイプと操縦可能掘削システムとの間における運動および力の伝達を制限または制御するのに役立つ。とりわけ、トラクターユニットは、負荷をドリルパイプに伝達するよりもむしろ、モーターの作動により生成されるトルクに反発する。同様に、ビットにより誘起される反作用のトルクは、ドリルパイプに伝達されず、その振動を低減させる。
【0010】
トラクターユニットおよび操縦可能掘削システムは、例えばドリルパイプを介して供給される流体を用いることにより、油圧式に動力が供給されてもよい。若しくは、または付加的に、ドリルパイプの回転および/またはドリルパイプで伝達されるWOB負荷が、これらの構成要素に動力を供給するのに用いられてもよい。さらに、それらは、電気的に動力が供給されてもよい。トラクターユニットおよび操縦可能掘削システムが、同一の動力源を用いる必要はない。
【0011】
トラクターユニットは、エネルギー変換装置、例えば、その運動を油圧エネルギーに変換する、またはその逆の変換を行う装置を含んでいてもよい。そのような装置は、地表またはダウンホールに配置される制御ユニットにより自動で制御されてもよく、または、手動で制御されてもよい。
【0012】
掘削中の計測を可能にするため、センサーが、トラクターユニット、または、ドリルパイプとドリルビットの間のその他の位置に設けられてもよい。例えば、ボアホールの形状および直径、ボアホールの安定性パラメータを表示するため、および、掘削の計測の間の圧力を提供するため、トラクターユニットとボアホール壁との間の係合部が使用されてもよい。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明の形態による掘削システムの一部の概略図である。
【図2】図2は、その他の形態を示す、図1と同様の図である。
【発明を実施するための形態】
【0014】
本発明は、付随する図を参照することにより、例示的な方法で、さらに説明される。
【0015】
図1に示される掘削システムは、ドリルパイプ12の下端部に連結されるトラクターユニット10を備えている。ドリルパイプ12は、ボアホール14の長さに沿って地表まで延びている。ドリルパイプ12は、使用中に地表から回転されるように構成されている。またドリルパイプ12は、圧力下で掘削流体すなわちマッドが供給されるように構成されている。典型的には、ドリルパイプ12は、動けなくなるのを避けるため、ゆっくりと回転される。
【0016】
ドリルパイプ12は、所定の範囲の形態をとることができる。例えば、ドリルパイプ12は、らせん状の管形材料またはその他の配管器具を含むことができる。
【0017】
トラクターユニット10は、連結用装置16を有しており、これによって、ドリルパイプ12がトラクターユニット10へ案内される。連結用装置16は、ドリルパイプ12を介してトラクターユニット10にマッドが供給されるのを可能にするよう構成される。連結用装置16は、さらに、通常使用中にはドリルパイプ12の回転がトラクターユニット10には伝達されず、しかし望まれる場合には、その動作モードが、トラクターユニット10をドリルパイプ12とともに回転させ、または、ドリルパイプ12よりも低い速度で回転させるよう切り替えられるよう、構成されている。好都合には、ドリルパイプとトラクターユニットとの間の相対的な動きをモニターするとともに、この情報を蓄積して、そしてこの情報を制御ユニットに伝達するセンサーが動作可能となっている。この場合、制御ユニットは、例えば、望まれない運動または振動を減衰させるようシステムの動作を制御するために使用され得る。
【0018】
ドリルパイプ12がトラクターユニット10から独立して回転するのを可能にすることにより、ドリルパイプ12は、望まれるのであれば、連続的に回転され得る。このことは、ドリルパイプ12が動かなくなるリスクを低減する。さらに、ドリルパイプ12の回転は、ボアホールに沿って通る流体を撹拌するよう使用され得る。これによって、ボアホール内において、掘削されたものの蓄積を低減することができる。連結用装置16は、独立した回転を可能にするが、しかしながら、例えば、トラクターユニット10が所定位置で渋滞し、またはトラップされるようになった場合にトラクターユニット10の開放を手助けするため、ドリルパイプ12がトラクター10へトルクを加えるべく使用され得るよう、連結用装置16がロック可能であることが好ましい。システムは、好ましくは、電源異常のイベントのときにこの設定に戻るよう構成される。
【0019】
トラクターユニット10は、好都合にはマッドで動力が供給されるモーターの形態によるダウンホールモーター18を支持する。マッドで動力が供給されるモーター18の出力は、操縦制御ユニット20に伝達される。この操縦制御ユニット20は、ドリルビット22に連結されている。使用中、モーター18の作動が、ドリルビット22を回転させ、操縦制御ユニット20が、ドリルビット22によりとられている向きまたは姿勢を制御し、これによって、使用中に、ボアホールが伸ばされる方向を制御することが理解されるであろう。
【0020】
ドリルパイプ12を、モーター18、操縦制御ユニット20およびドリルビット22を支持し、またこれらに負荷を加えるために使用するよりもむしろ、トラクターユニット10が、モーター18、操縦制御ユニット20およびドリルビット22を支持するとともに、以下に説明されるように、ドリルビット22にビット荷重(WOB)負荷を加えるために使用され得る。このため、ドリルパイプ12は、その自重を支持し、加えられた流体圧力に耐え、そして、トラクターユニット10を引っ張るのに使用される場合に加えられた負荷を運搬するよう、十分に強くなっている通常のドリルパイプに比べて、より薄い壁で仕切られていてもよく、また、より増大された直径からなっていてもよい。
【0021】
ビット22の回転速度を増大させるため、ギヤボックスが設けられていてもよい。流体連結または遊星ギヤボックスまたは等速ギヤボックスが、トルクおよび回転速度、従ってビット22へのパワーを調整するために設けられていてもよい。
【0022】
トラクターユニット10は、ボアホール14の壁をとらえ、そして、内部の牽引システムによってボアホール14の長さに沿って移動可能となっている。牽引システムは、しゃくとり虫に基づいており、若しくは、軌道(track)、ホイール、差動ピストン、回転する環状面(rolling toroid)またはスクリュー式に作動される装置を備えていてもよい。さらに、これらの技術の任意の組合せが、ボアホール14に対する移動のためにトラクターユニット10を駆動するのに使用され得る。トラクターユニット10の牽引システムの動作は、使用中、WOB負荷をドリルビット22に加えるのに使用され得るということ、および、ドリルビット22の回転と組み合わせてのWOB負荷の適用は、ドリルビット22がボアホール14の端部から物質を掻き出し、侵食し、または掘ることを引き起こし、これによって、操縦ユニット20により制御される方向におけるボアホール14の軸方向の長さを増大させるまたは伸ばすということが理解されるであろう。トラクターユニット10は、制御システムに含まれるルールに従って、ビットの前進を制御する。ルールは、ビットのタイプ、地質の特徴、掘削およびボアホールの状態、およびマッドシステムを考慮して選択され得る。またルールは、適切なセンサーから導かれる情報に応じて働くよう選択され得る。ユニット10は、さらに、ビット22の侵入速度を制御し、また、モーター18の動作を制御することにより回転速度を制御する。ドリルビット22により取り除かれる物質は、典型的には、ドリルパイプ12とボアホール14の壁との間に画定される環状の通路に沿って地表に向かって移動する掘削流体すなわちマッドの戻り流によってボアホール14の下端から押し流される。
【0023】
トラクターユニット10の牽引システムと組み合わせて連結装置16を備えることは、ドリルパイプ12よりもむしろ地質に対して伝達される、モーターおよびビットにより誘起される反作用力を生じさせ、ドリルパイプ12の振動を低減させる。
【0024】
マッドで活性化され、軸方向に延びるピストン24(図2参照)は、WOB負荷を制御し、および、WOB負荷をビット22に加えるため、および/または、モーター18、操縦制御ユニット20およびドリルビット22を軸方向の振動から切り離すため、トラクターユニット10上に設けられてもよい。軸方向の振動は、例えば、ドリルパイプ12において生じうるものであり、WOB負荷を加えるため利用されるものである。ピストン24は、ダウンホールまたは地表に配置されたコンピュータにより適切なセンサーの出力を用いて制御される、ダウンホールに配置された釣り合いバルブを用いて制御されてもよい。そのような構成において、トラクターユニット10の牽引システムは、ピストン24により加えられる負荷に反発する。
【0025】
トラクターユニット10により全体的に、または、ピストン24などにより、または、これらの影響の組合せとしてWOB負荷が加えられる場合、加えられるWOB負荷の大きさは、好都合には、全体的な掘削速度、石盤のタイプ、ビットの設計、支配的な衝撃および振動の状態、およびビットの振動などの要因を考慮する制御アルゴリズムからの出力に応じて制御される。
【0026】
モーター18および操縦制御ユニット20を備えるトラクターユニット10および操縦可能な掘削システムのための主要な動力源は、ドリルパイプ12を介して運ばれるマッドの供給を用いて油圧式に得られる、ということが考えられる。電気的な動力が、タービンを駆動し、また電気発電機を駆動するためのマッドの供給を利用することにより生成されてもよい。しかしながら、その他の駆動技術が利用されてもよいことが理解されるであろう。例えば、トラクターユニット10に対するドリルパイプ12の回転は、電気発電機を駆動するための、または油圧式の動力を加えるダウンホール流体を加圧するマッドモーターを駆動するための相対的な回転を利用することにより、電気的なエネルギーまたは油圧式のエネルギーに変換され得る。発電機の動作を制御することにより、ドリルパイプのねじり荷重が、制御され、また望まれるのであれば地表へ信号を伝達するために使用され得る。望まれるのであれば、この効果を高めるため、ドリルパイプの下端を積極的に駆動することも可能である。若しくは、ドリルパイプ12により加えられるビット荷重負荷が、動力を供給するために利用されてもよい。さらなる変形は、電気ケーブルでつながれたドリルパイプ、または、高電流伝導体を運搬することができる複合管材を介して、電気的な動力を供給することである。もちろん、これらの技術の組合せも利用され得る。エネルギー変換システムが設けられている場合、変換システムは、ダウンホールに配置されたコントローラー、または地表に配置されたコントローラーを介して自動的に制御され得る。さらに、変換システムは、地表に位置するオペレータにより、部分的にまたは全体的に手動で制御されてもよい。
【0027】
前述のように、トラクターユニット10は、ボアホール14の長さに沿って駆動され得る。またトラクターユニット10は、ボアホール14の内側の所望の位置における運動に対して保持され得る。また、トラクターユニット10は、WOB負荷をドリルビット22に加えるよう利用され得る。トラクターユニット10の牽引システムは、さらに、ボアホール14に対する回転運動に対してトラクターユニット10を固定するよう利用されてもよい。ボアホール14に対するトラクターユニット10の軸方向位置をモニターすることは、ドリルビット22の位置の表示を提供するよう利用され得る、ということが理解されるであろう。さらに、ボアホール14の壁にトラクターユニット20が係合するのをモニターすることにより、ボアホール14の直径および形状がモニターされ、また、掘削測定の間の圧力が形成され得る。マッドの固まり(mud cake)のひずみが、ボアホール14のための安定性パラメータを決定するために利用され得る。
【0028】
上述のように、掘削流体すなわちマッドの戻り流は、ドリルビット22により取り除かれた物質を洗い流すために利用され得る。望まれるのであれば、トラクターユニット10が、ボアホール14の壁とともに圧力シールを形成し、戻り流を遮蔽してもよい。そのような環境における戻り流を制御するため、トラクターユニット10において、通路およびバルブが設けられてもよい。
【0029】
操縦可能掘削システムは、形態における所定の範囲をとることができる。例えば、操縦制御ユニット20は、所望の方向で横向きに作用する負荷をドリルビット22に対して加えて、それを所望の方向へと駆り立てるよう動作可能なバイアスユニットを備えていてもよい。また、操縦制御ユニット22は、曲げられたハウジング(bent housing)と、ドリルビット22を所望の方向に向けるため、曲げられたハウジングを所望の方向に配向させるよう動作可能な機械と、を含むことができる。その他のシステムも可能である。例えば、非回転の摺動スリーブの回転操縦可能なシステムが用いられてもよく、または、プッシュザビット(push the bit), ポイントザビット(point the bit), または組合せの操縦原理を含む操縦掘削システムが利用され得る。
【0030】
ドリルビット22は、形態における所定の範囲をとることができる。例えば、ドリルビット22は、従来の回転ドラッグタイプのドリルビットを備えていてもよい。しかしながら、その他の形態のビットも利用され得る。
【0031】
ワイヤで接続されたドリルパイプシステムが、地表とトラクターユニット10との間でのデータ通信を可能とするよう利用されてもよい。そのようなシステムはまた、若しくは代替として、上述のように電気的なパワーをトラクターユニット10に供給するために利用され得る。
【0032】
拡張された範囲での応用における制御をアシストするためのドリルパイプ(図2参照)の長さに沿って、1つまたはそれ以上のさらなる類似のトラクターユニットを含むことが望まれてもよい。トラクターユニットは、好ましくは所要の通信速度を実現するようワイヤで接続されたドリルパイプを用いて、好ましくは一斉に制御される。これによって、先に概説された利点を実現することができる。
【0033】
要約すれば、トラクターユニット10は、掘削および操縦のための安定なベースを提供する。従って、より高いレベルのROPが達成され、また、操縦がより正確に制御され得る。ROPの改善は、ビット22のWOB、トルクおよび回転速度に関する改善された制御から生じる増大された即座のスピードの結果として、直接的なものであり、また、より安定でないプラットフォームからの掘削により引き起こされる問題から回復するときの中断時間を、避けるまたは低減することによる。
【0034】
本発明の範囲から逸脱することなく、ここに記載された構成に対する、広い範囲における修正および変形がなされ得ることが理解されるであろう。
【特許請求の範囲】
【請求項1】
トラクターユニットに連結される、回転可能なドリルパイプと、
トラクターユニットに連結されるとともに、トラクターユニットにより移動可能な操縦可能掘削システムと、
を備えたことを特徴とする掘削システム。
【請求項2】
ダウンホールモーターをさらに備えたことを特徴とする請求項1に記載の掘削システム。
【請求項3】
トラクターユニットおよび/または操縦可能掘削システムが、油圧式に動力を供給されることを特徴とする請求項1または2に記載の掘削システム。
【請求項4】
油圧式の動力が、ドリルパイプを介して供給される流体を使用して供給されることを特徴とする請求項3に記載の掘削システム。
【請求項5】
ドリルパイプの回転および/またはドリルパイプで伝達されるWOB負荷が、トラクターユニットおよび/または操縦可能掘削システムに動力を供給するため使用されることを特徴とする請求項1または2に記載の掘削システム。
【請求項6】
回転および/またはWOB負荷が、電気的なエネルギーおよび/または油圧式のエネルギーを生成するために使用されることを特徴とする請求項5に記載の掘削システム。
【請求項7】
トラクターユニットおよび/または操縦可能掘削システムが、電気的に動力を供給されることを特徴とする請求項1または2に記載の掘削システム。
【請求項8】
電気的なエネルギーが、少なくとも1つのケーブル、配線されたドリルパイプ装置、および複合ドリルパイプに設けられた伝導体を介して供給されることを特徴とする請求項7に記載の掘削システム。
【請求項9】
掘削中の測定を可能とするため、トラクターユニット上、または、ドリルパイプとドリルビットとの間のその他の位置に設けられたセンサーをさらに備えたことを特徴とする請求項1乃至8のいずれかに記載の掘削システム。
【請求項10】
センサーは、ボアホールにおけるボアホール安定化パラメータの直径および形状のうちの少なくとも1つをモニターすることを可能とすることを特徴とする請求項9に記載の掘削システム。
【請求項11】
トラクターユニットは、ボアホールに係合する牽引手段を含むことを特徴とする請求項1乃至10のいずれかに記載の掘削システム。
【請求項12】
牽引手段は、しゃくとり虫装置、軌道、ホイール、スクリューまたは圧力差動ピストン手段を備えたことを特徴とする請求項11に記載の掘削システム。
【請求項13】
ドリルパイプとトラクターユニットとの間の連結部が制御可能であることを特徴とする請求項1乃至12のいずれかに記載の掘削システム。
【請求項14】
トラクターユニット上に設けられ、操縦可能掘削システムを移動させるよう作動可能なピストンをさらに備えたことを特徴とする請求項1乃至13のいずれかに記載の掘削システム。
【請求項15】
ドリルパイプに沿った一部分に位置する少なくとも1つのさらなるトラクターユニットをさらに備えたことを特徴とする請求項1乃至14のいずれかに記載の掘削システム。
【請求項1】
トラクターユニットに連結される、回転可能なドリルパイプと、
トラクターユニットに連結されるとともに、トラクターユニットにより移動可能な操縦可能掘削システムと、
を備えたことを特徴とする掘削システム。
【請求項2】
ダウンホールモーターをさらに備えたことを特徴とする請求項1に記載の掘削システム。
【請求項3】
トラクターユニットおよび/または操縦可能掘削システムが、油圧式に動力を供給されることを特徴とする請求項1または2に記載の掘削システム。
【請求項4】
油圧式の動力が、ドリルパイプを介して供給される流体を使用して供給されることを特徴とする請求項3に記載の掘削システム。
【請求項5】
ドリルパイプの回転および/またはドリルパイプで伝達されるWOB負荷が、トラクターユニットおよび/または操縦可能掘削システムに動力を供給するため使用されることを特徴とする請求項1または2に記載の掘削システム。
【請求項6】
回転および/またはWOB負荷が、電気的なエネルギーおよび/または油圧式のエネルギーを生成するために使用されることを特徴とする請求項5に記載の掘削システム。
【請求項7】
トラクターユニットおよび/または操縦可能掘削システムが、電気的に動力を供給されることを特徴とする請求項1または2に記載の掘削システム。
【請求項8】
電気的なエネルギーが、少なくとも1つのケーブル、配線されたドリルパイプ装置、および複合ドリルパイプに設けられた伝導体を介して供給されることを特徴とする請求項7に記載の掘削システム。
【請求項9】
掘削中の測定を可能とするため、トラクターユニット上、または、ドリルパイプとドリルビットとの間のその他の位置に設けられたセンサーをさらに備えたことを特徴とする請求項1乃至8のいずれかに記載の掘削システム。
【請求項10】
センサーは、ボアホールにおけるボアホール安定化パラメータの直径および形状のうちの少なくとも1つをモニターすることを可能とすることを特徴とする請求項9に記載の掘削システム。
【請求項11】
トラクターユニットは、ボアホールに係合する牽引手段を含むことを特徴とする請求項1乃至10のいずれかに記載の掘削システム。
【請求項12】
牽引手段は、しゃくとり虫装置、軌道、ホイール、スクリューまたは圧力差動ピストン手段を備えたことを特徴とする請求項11に記載の掘削システム。
【請求項13】
ドリルパイプとトラクターユニットとの間の連結部が制御可能であることを特徴とする請求項1乃至12のいずれかに記載の掘削システム。
【請求項14】
トラクターユニット上に設けられ、操縦可能掘削システムを移動させるよう作動可能なピストンをさらに備えたことを特徴とする請求項1乃至13のいずれかに記載の掘削システム。
【請求項15】
ドリルパイプに沿った一部分に位置する少なくとも1つのさらなるトラクターユニットをさらに備えたことを特徴とする請求項1乃至14のいずれかに記載の掘削システム。
【図1】

【図2】
【図2】
【公表番号】特表2011−504212(P2011−504212A)
【公表日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願番号】特願2010−536968(P2010−536968)
【出願日】平成20年11月19日(2008.11.19)
【国際出願番号】PCT/US2008/083957
【国際公開番号】WO2009/067468
【国際公開日】平成21年5月28日(2009.5.28)
【出願人】(597124903)シュランベルジェ、ホールディング、リミテッド (11)
【氏名又は名称原語表記】SCHLUMBERGER HOLDINGS LIMITED
【Fターム(参考)】
【公表日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願日】平成20年11月19日(2008.11.19)
【国際出願番号】PCT/US2008/083957
【国際公開番号】WO2009/067468
【国際公開日】平成21年5月28日(2009.5.28)
【出願人】(597124903)シュランベルジェ、ホールディング、リミテッド (11)
【氏名又は名称原語表記】SCHLUMBERGER HOLDINGS LIMITED
【Fターム(参考)】
[ Back to top ]