
掘削孔用装置

【課題】掘削孔用装置に搭載された慣性センサからの慣性データ信号における不要な振動に対して減衰効果を与える電子回路を提供する。
【解決手段】指向性装置22はゾンデの形状の円筒ハウジング32を有する。従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’などの部品が指向性装置の内部に搭載されている。慣性センサのそれぞれに一つが対応するよう減衰回路36がある。指向性装置が掘削による振動をうけると、加速度計からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし減衰回路のコンデンサのリアクタンスは周波数と共に増加し、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。
【解決手段】指向性装置22はゾンデの形状の円筒ハウジング32を有する。従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’などの部品が指向性装置の内部に搭載されている。慣性センサのそれぞれに一つが対応するよう減衰回路36がある。指向性装置が掘削による振動をうけると、加速度計からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし減衰回路のコンデンサのリアクタンスは周波数と共に増加し、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は地下で使用される装置に関連し、特に、掘削孔用の装置/機器を稼働するための回路設計に関連する。
【背景技術】
【0002】
傾斜掘りは、油及び/又はガスを発見するために、及び多用途の水平方向掘削(HDD)部のために、垂直でない井戸を掘るために利用されている。これは、坑底アセンブリ(BHA)としても知られるドリルストリングの最下部を制御することによって実現できる。通常、BHAは(垂直なドリルストリングにおいて下から上に)ビット、(操縦可能なシステムに屈曲をもたらす)マッドモータ、スタビライザ、ドリルカラー、重量ドリルパイプ、ジャーリング装置(「ジャーズ」)、及び様々なねじ形状に重複する部分を有する。BHAはビットに力を加えることによって、(ビットにのしかかっている)岩を砕き、厳しい機械環境を乗り切り、井戸の方向の制御を掘削機にもたらす。BHAは、マッドモータ、傾斜掘り及び測定用装置(「指向性装置」)、測定掘削機器、記録掘削機器、及び他の特殊な装置を有する場合もある。
【0003】
通常、垂直から外れた井戸を掘るために、(マッドモータのハウジングの上又は中に配置された)屈曲部がビットの長手軸を約0.5°から3.0°だけドリルストリングの軸から離して配置する。ドリルストリングの先端におけるこのわずかな方向の変更は、井戸内でビットにかかる重量及び/又は屈曲部の角度位置を調節することによって掘削方向を調節可能にするのに十分である。ビットにかかる力が大きいほど、井戸の現在の軸から大きく外れさせ、逆も同様である。
【0004】
希望する目的地へと、たぶん所定の経路に沿って地表から到達するように掘削の方向をモニタリングすることが重要である。この目的のため、その機能が屈曲部の現在の位置を示すデータを地表に送ることである指向性装置をBHAは有しているため、必要であれば、ドリルストリングを回転させる及び/又はビットにかかる重量を調整することによって調節が可能である。指向性装置はマッドモータより下に配置されている場合もある。
【0005】
現在、磁性指向性装置は、ほぼ油井構造物及び(例えば、河川を横断する)実用的な水平方向の掘削部内において開孔の傾斜掘削孔の掘削軌跡のモニタリング及び制御においてのみ使用されている。通常は、指向性装置はドリルストリングのBHAの軸に沿って設置されている。
【0006】
指向性装置は多数のセンサを備えており、センサの出力情報は機器(ひいてはビット)の方向を決定するために解析可能である。センサは、垂直な三つの慣性グレードの加速度計と、三つの垂直な精密磁力計とを備えており、装置の本体の姿勢がそこから発せられる地球の重力及び磁界に関する装置のベクトル測定結果から決定される場合もある。磁力計及び加速度計は指向性装置内に設置されており、それぞれの種類の一つがX、Y、及びZ軸に向けられている。通常、X及びY軸は相互に垂直であり、指向性装置の長手軸に対して垂直である。通常は、Z軸はX及びY軸の両方に垂直であり、指向性装置の長手軸に平行である。装置のハイサイドは、装置のZ軸上であり且つZ軸に沿った垂直面に対する(通常は重力X又は重力Y軸から測定される)側部装置の参照からの(通常は360度にわたって回転される)回転角である。
【0007】
BHAに指向性装置が搭載されると、通常は、屈曲部が向く(BHAの軸に垂直な)角度方向と指向性装置のハイサイド角との間にいくらかの角度のずれが生じる。この角度のずれはBHAが掘削孔内に移動する前に現地で測定される。このずれは指向性装置からもたらされる方位基準を調整するために利用され、掘削者には掘削孔のハイサイドから曲がっているBHAの角度の測定結果について情報が提供される。掘削孔のハイサイドからの屈曲部の角度方向の表示は、「グラビティツールフェース(gravity toolface)」測定として知られている。この方向は、ツールフェイスがつけられた丸いダイヤルにおいて掘削者に表示される場合もある。使用時には、それぞれのセンサからの出力がアナログからデジタルへと変換され、サンプルは平均化されて他のセンサの出力と共に処理されることによって、グラビティツールフェース測定を行うことが出来る。
【0008】
通常は、「ケリーダウン(kelly down)」の終了後であり且つスタンド又はドリルパイプの追加及び掘削活動の再開前においてドリルストリングが固定されているときに、掘削孔の測量は行われる。これらの状態においては、ドリルパイプは固定されており、指向性装置からの安定した測定値が容易に得られる。
【0009】
操縦可能な(摺動)アセンブリを用いて掘削することによって、ドリルビットを駆動するための電力がBHA内のマッドモータから得られる場合、掘削方向の制御は掘削リグの回転テーブル又は最上部の駆動によるBHAの回転位置によって影響を受ける。そのような装置は掘削と操縦を同時に行うことを可能にする。しかし、BHAが(通常5−500Hzの範囲の周波数であるランダムな3軸方向の振動である)掘削により生じる振動にさらされるため、掘削中に行われるグラビティツールフェース測定は安定しない又は測定値に過度の変動をもたらす。このことは井戸の方向の正確な追跡をより困難にしており、環境によっては、井戸の方向を確認するために定期的に掘削が中断される。
【0010】
それにも関わらず、あるオペレータは、操縦可能なアセンブリの運転中に「急いで測量(surveys on the fly)」を行い、迅速なデータ取得及び高度な平均化技術に頼ることによって、定量的な操縦及び測量のデータを得ることを試みている。
【0011】
例えば、ビットにおける傾斜などの測量取得及び軌跡制御、回転アセンブリの傾斜及び測量、地理誘導、及び回転操縦システム(RSS)などの指向性装置を利用する他の回転掘削及び操縦の利用もあり、後者は能動的なグラビティツールフェース制御又は完全な(傾斜及び方位角の)追跡制御のための慣性プラットフォームの回転安定化を利用している。そのような利用においては、指向性装置のセンサも掘削により生じる振動によって機能が損なわれる。
【0012】
上記の全ての用途において、掘削により生じる振動は非常に深刻であり、センサの出力は飽和し、データ取得及び平均化技術によって処理できない非直線性を生じる。
【0013】
油井建造及び公益事業は、地球の重力場(G)の測定のために市場で入手可能な様々なサーボ機構の加速度計を利用しており、正確な測定のための産業的な標準はクオーツの可撓性ヒンジ装置である。これらは一般に閉ループ構造であるため、整流トルカ(torquer)コイルを流れる電流はプルーフマスの位置にサーボ制御され、制御はプルーフマスを平衡又はゼロ位置に維持しようとする。トルカ電流の大きさは加速度計が感知する軸に作用する重力場の測定値である。
【0014】
図1は、そのような加速度計Aからの出力を処理するための周知の回路の一部を示している。加速度計Aが静止していることを前提とし、加速度計Aはその検出軸に沿った加速に比例する安定した電流を出力する。装置の必要な方向の測定値を得ることを目的とする掘削において、加速度計からのDC出力のみが関与する。出力電流は精密抵抗R1によって測定可能なDC電圧に変換され、次に電圧はアナログ−デジタル変換機又はADC(図示しない)によって測定される。使用中に、指向性装置内の温度も測定され、装置及び電子機器に補正率を適用するために利用される。三つの加速度計が指向性装置に搭載されているため、上述したように装置のX、Y及びZ軸のそれぞれに沿った重力場の成分を測定することができる。これらの加速度計は、大きさ及び不整合誤差が最小化されるように、装置のハウジングに設置された後に較正及びモデル化される。したがって、加速度計の反復可能及び予測可能な機能はGのモデル化及び測定を正確にするために非常に重要である。
【0015】
現在、掘削産業においては、それぞれの加速度計によって提供される傾斜測定値に0.1°の精度が求められている。この精度のレベルは、指向性装置がそれぞれの加速度計の傾斜において1mGの変化を検出可能でなければならないことを意味している。市販の加速度計からの一般的な出力電流は約3.0A/Gであり、これは出力電流を処理する電気回路が3μA程度の出力電流の変化を分解可能でなければならないことを意味する。
【0016】
出願人はこの目的を実現する上での特有の問題を特定した。具体的には、現在は、精密抵抗を通る加速度計からの出力電流によって生じるDC電圧をサンプリングするために、事実上全ての指向性装置がADC変換機を利用している。それぞれのADCは一定の電圧捕捉範囲と一定数のビットの分解能とを有する。12ビットの分解が一般的であり、ビット数がいくつであろうと問題は同じである。要求されるレベルで分解するために、正負両方の入力電圧に対して少なくとも1000の量子化レベルを用いることが必要である。したがって、ADCの電圧捕捉範囲が掛けられる(1000/合計数の量子化レベル)で与えられるADCに必要な最小の電圧入力値が存在する。
【0017】
例えば、最大186の12ビットADCが一般に指向性装置で用いられている。これは±2Vの捕捉範囲を有しているため、所望される分解能を得るための回路からの最小入力電圧は±0.98Vから±1Vである。
【0018】
掘削が測量値を得るために停止されると、回路からのDC電圧は安定になり、ADCの捕捉範囲内に収まる。
【0019】
しかし、(操縦可能なアセンブリによって掘削する際に生じるような)振動状態においては、それぞれの加速度計からの出力はDC成分の頂点における不定期なAC様の波形の付加によって変化する。このAC波形は、振動状態におけるゼロ位置にプルーフマスをしっかりと保持するために必要な変更可能なトルカコイルの電流によって生じる。それにも関わらず、加速度のDC成分の抽出は検出システムの周波数帯域幅能力内で可能である。しかし出願人は、既存の回路における数G以上の振動に対する耐性は非常に悪いことを見出している。起こることは、回路からのDC出力がすぐにADCの捕捉範囲外に出てしまい、DC出力電圧の切り取りと整流エラーが生じ、数十度外れる可能性のあるグラビティツールフェース測定をもたらす。
【0020】
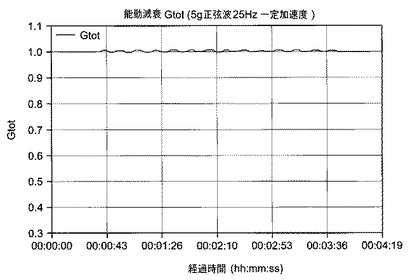
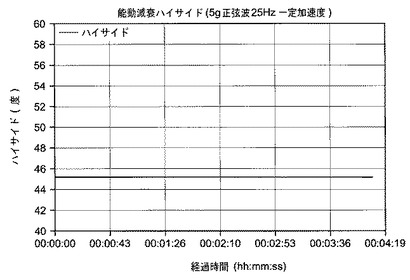
図2及び3は、図1に示されている回路を採用している指向性装置の反応を示している。装置はテストリグに向けられており、Z軸は水平であり、加速度計のX及びY軸はそれぞれ水平からプラス45°及びマイナス45°であった。指向性装置は垂直面において25Hzで5gの一定のピークである加速度で正弦波振動していた。図2において、X軸における時間に対して、Y軸は三つの加速度計のそれぞれからの加速度出力のベクトルの和(Gtot)を示している。振動が開始する前に、1Gtotの正確な測定値が装置から出力された。振動が開始するとすぐに、出力は0.4Gtotに変化し、それは振動の整流エラーによって起こる。上述したように、回路からの出力電圧がDC電圧が入力されるADCの電圧捕捉範囲を上回ることによって、このエラーは起こる。したがって、電圧はADCによって切り取られ、波形の正側及び負側のそれぞれにおいて切り取られた信号の比率が整流エラーの方向及び大きさを決める。図3は装置のハイサイドの出力におけるエラーを示しており、それは、装置が実際には全く回転していないときに軸が約10°回転したことを示している。使用に際して、この測定結果が上述した角度のずれと組み合わされることによって、ツールフェイスの測定値がもたらされる。これは10°だけ不正確であり、実際に何も必要とされない場合には、掘削者に掘削を停止させ、ストリングに対する回転補正を行わせる原因となる。
【0021】
図2のずれた部位の正弦様部分は実験中にADCによって行われたサンプリングのエイリアシング効果である。具体的には、サンプリングレートが約30分続いた実験全体に対して120サンプルのみであった。そのため、サンプリングレートがナイキスト基準を満たしておらず、入力頻度のエイリアシングが予測可能であった。それにも関わらず、実験が整流エラーの問題を示したため、このことは重要ではない。一般に、掘削孔測定において、加速度計からの出力信号は通常数百キロヘルツにおいてサンプリングされ、掘削によって生じる振動は通常5〜500Hzの範囲であるため、そのようなエイリアシングは実際には行われない。
【0022】
図1の回路に対する改良が図4に示されており、この後者の回路はしばらくの間当該分野において用いられてきた。図4の回路は、トルカコイル電流検出抵抗R1と平行にR2及びC2を備える低インピーダンス経路を用いている。これは、出力信号のAC成分において周波数のかなりの部分を地面に短絡する効果を有する。
【0023】
図5及び6は、図4の回路を採用している指向性装置における実験結果を示している。実験は図1の回路を用いて行った実験と同様に行った。明らかに分かるように、出力Gtotとハイサイドは振動整流エラーの減少を示しており、グラビティツールフェース測定が掘削中に行われた場合に改善された成果を示している。
【0024】
改善された成果にもかかわらず、図4に示される種類の回路及び類似の作動原理を採用している他の回路にはいくつかの問題が存在している。具体的には、コンデンサC2の遮断周波数(3dBポイント)がAC成分の大半を除去できるほど十分に低い場合、コンデンサC2は非常に大きいことが必要になる。一般的に必要な静電容量は100〜300μFの範囲である。そのような静電容量は多くの場合は湿式タンタルコンデンサによってもたらされるが、それは例えば15mmの直径×30mmの長さであり物理的に非常に大きい。湿式タンタルコンデンサは分極されているために(加速度計からの双極性振動に適合するためには)1個の加速度計につき2個のそのようなコンデンサが必要となるため、3個全ての加速度に対して6個のコンデンサが必要であるという事実によりその問題は悪化する。このことは、指向性装置内の回路に利用可能な空間のかなりの部分を使用してしまう。装置を小さくする産業上の圧力が存在する。例えば、従来のいくつかの指向性装置は、25mmから36mmの直径及び304mmの長さ(12インチ)の円柱空間内に適合しなければならない。したがって、省スペース化が可能であることが望まれる。
【0025】
更なる問題は、指向性装置は例えば−5℃から約175℃の広範な温度において長期間確実に作動しなければならないことである。高温においては、電解コンデンサが内部漏洩し、それは温度に対して非直線となる電流の漏洩を引き起こすことが知られている。その影響は信号処理の間に容易に補正できないために、このようなことは非常に好ましくない。
【0026】
装置の耐振動性のわずかな改善は、(例えば16ビットの)より大きな分解ADCを用いることによって行うことが可能であり、必要な定量化レベルの数値(例えば1000)はより小さな割合を占める。しかし、これはDC電圧の切り取りを防ぐことができず、整流エラーも存在する。
【0027】
したがって、問題を解決する又は上述したエラーを少なくする改良された装置及び機器の設計に対する需要がある。
【発明の概要】
【0028】
発明のある実施形態は、掘削孔における作業に用いられる装置を提供する。当該装置は、掘削孔における作業中に慣性データ信号を提供するように形成された少なくとも一つの慣性センサと、慣性データ信号における不要な振動の影響に対する減衰効果を提供するように形成された電子回路と、を備えており、慣性データ信号は不要な振動の影響を受け、電子回路は慣性データ信号への不要な振動の影響を補正するために静電容量効果を増幅するよう形成されている。
【0029】
本発明のある実施形態は、掘削孔用装置を運転する方法を提供する。当該方法は、掘削孔用装置に搭載された少なくとも一つの慣性センサを利用して掘削孔における作業中に慣性データ信号を取得する段階と、掘削孔用装置に搭載された電子回路を用いて慣性データ信号における不要な振動の影響に対して減衰効果をもたらす段階を有し、慣性データ信号は不要な振動の影響を受け、電子回路は慣性データ信号における不要な振動の影響を補正するために静電容量効果を増幅するよう形成されている。
【0030】
本発明のある実施形態においては、装置は、掘削作業の一部である掘削孔の形成において使用できる慣性データを提供するために閉ループサーボ機構を備える少なくとも一つの慣性センサを有しており、慣性センサは掘削孔の形成に関連して掘削孔にもたらされる不要な振動を受けやすく、使用中に不要な振動が慣性センサからの出力電流に波形として重ねられ、装置は出力電流から少なくともいくつかの波形をフィルタリングするための静電容量を有する減衰回路を備えており、減衰回路は出力電流の波形部に対するシンクを有することによって、減衰回路によってもたらされるフィルタリング効果を向上することができることを特徴とするように構築されている。掘削孔に生じる不要な振動は掘削により生じる振動を含むが、慣性センサの出力電流に影響を与える他のあらゆる掘削孔の振動も含む。ある実施形態においては、シンクは正及び負の両方の電流シンクとして機能し、シンクは波形の正及び負の部分の両方に作用する。慣性データは、限定されないが、以下の掘削作業の一つ又は組み合わせに有効である:掘削孔追跡誘導、地理誘導、回転誘導掘削、RPMデータ、ガンマ線ビニングデータ及びドリルストリングのスティック/スリップの測定、並びに垂直孔掘削。例えば、慣性センサによって提供される慣性データはセンサの検出軸に沿った加速度を表す。この目的に有用なセンサの一種は加速度計である。
【0031】
ある実施形態の一つの具体的な利点は、正確な測定値を提供している間に、少なくとも一つの慣性センサが掘削孔の振動源(例えばドリルビット)の近くに配置可能であることである。ツールフェイスの測定結果が実施のツールフェイスのより近くにおいて得られ、掘削追跡をより正確に管理できるため、このことは非常に有益である。
【0032】
ある実施形態において、閉ループサーボ機構のフィードバックの少なくとも一部が操作及び減衰回路による処理のために慣性センサの外部から利用可能になっている。別の実施形態においては、減衰回路は慣性センサの一部であり、慣性センサのハウジングの外部から利用可能なフィードバックの部分は無い。ある実施形態においては、シンクはコンデンサによって提供されている別の接地経路から分離した波形のための接地経路を備える。
【0033】
ある実施形態において、シンクは減衰回路における実効静電容量を増加させるためにソリッドステート回路を有している。ソリッドステート回路は、本明細書において提案されているように機能するように配置された複数の分離したトランジスタを有していても良い。もしくは、ソリッドステート回路はオペアンプを備えていても良い。
【0034】
ある実施形態において、シンクは、コンデンサを通り越した出力電流の一部をオペアンプの出力へとバイパスするために、ネガティブフィードバックオペアンプとシャント抵抗とを備えており、使用時に、オペアンプがコンデンサのために電流を供給すると共に電流を吸い込むため、減衰回路における実効静電容量を増加させることができる。
【0035】
減衰回路は、慣性センサからの出力電流をコンデンサを有する低域フィルターを介してオペアンプの非反転入力部へと入力するよう形成されていても良い。
【0036】
ある実施形態においては、電流バッファーがオペアンプの出力に付与されている。この構成の一つの利点は、オペアンプの電流出力が改善されることである。具体的には、高温(例えば約150℃以上)での発明の使用において必要となる種類のオペアンプ(例えば、低電力、高精度、小補正、小帯域幅)は、数ミリアンペアを超える電流を供給又は吸収できない。電流バッファーは電流量を増加させ、オペアンプは慣性センサからの波形出力を取り扱うために供給及び吸収できる。更なる利点は、この電流を供給及び吸収する放熱が1つより多くの複数の部品に広がることであり、このことは掘削孔における高温での使用に重要である。ある実施形態においては、シンクが静電容量増幅器を備えている。
【0037】
ある実施形態において、減衰回路は約100Hz未満の遮断周波数を有しているため、慣性センサの向きを意図的に変更することにより、静電容量を通して蓄えられている電圧、及び減衰回路によりもたらされる向きの出力表示を変更することができるが、出力電流における高周波数は静電容量を通した電圧をほぼ影響を受けないように放置する。いくつかの用途は他より多くの波形フィルタリング効果を必要とするため、出力電流にどれだけの波形が残されるかは、具体的な用途ごとに選択可能である。したがって、ある実施例においては遮断周波数は使用中に調節可能であるが、遮断周波数は目的の用途に合わせて設定可能である。例えば、より高い及びより低い周波数も選択できるが、回転操縦掘削用の一般的な遮断周波数は約10Hzである。例えばガンマ線検出、RMP、スティック/スリップなどの回転検出用途においては、遮断周波数は約30〜50Hzである。慣性センサの向きの意図的な変更は、例えば回転掘削及びツールフェイスを変更するためのドリルストリングの回転によって起こる。
【0038】
ある実施形態において、減衰回路は、掘削作業のガイドに用いるための慣性センサの相対回転位置を表すDC出力電圧を提供するために慣性センサからの出力電流を利用し、減衰回路はDC出力電圧をADCに入力するよう配置されており、ADCは、ADCからの出力において整流エラーを生じる入力電圧が抜き出されている上又は下の許容可能な入力電圧捕捉範囲を有しており、使用時においてDC出力電圧が減衰回路によってほぼ安定化されるように配置されているため、掘削中において、掘削による慣性センサの振動にも関わらず、DC出力電圧はADCの捕捉範囲内に実質的に存在する。ある実施形態においては、減衰回路によってもたらされる減衰又はフィルター効果は、DC出力電圧を装置におけるADCの捕捉範囲内に維持するように使用中に調節される。
【0039】
ある実施形態において、装置は三つの相互に垂直な慣性センサを有しており、それぞれが(個別に又は共同で)、各慣性センサからの出力電流上に波形として現れる掘削孔による振動をフィルタリングするための関連減衰回路を備えている。ある実施形態において、減衰回路はそこからもたらされるフィルタリング効果を変更するために調節可能である。この調節は現地の地上において、例えば使用の直前に行われる。
【0040】
別の実施形態においては、使用中に減衰回路が掘削孔において調節可能である。このことは、例えばツールフェイス測定装置とRPM又はスティック/スリップ測定装置との間で切り替えることが望まれる場合、異なる作業のために装置をコントロール及び使用可能にする。
【0041】
調節可能にするために、発明のある実施形態においては、減衰回路は可変回路素子を備えている。そのような可変回路素子は、例えばデジタル式のポテンショメータ又はアナログ式のスイッチである。回路素子の変化により減衰回路の遮断周波数を調節してもよい。
【0042】
ある実施形態において、装置は、約150℃を超える、可能であれば約175℃を超える温度の掘削孔における使用に適している。装置は、例えばセラミックで覆われており、サファイアの上にシリコンが乗ったソリッドステート部品などの好適な従来の回路部品を用いてより高い温度(例えば200℃)での使用に適するように作られていても良い。
【0043】
本発明の別の実施形態によると、掘削作業において掘削孔で使用され且つ慣性の基準を必要とする装置の使用のために、ハウジングと、ハウジングに設置された少なくとも一つの慣性センサと、本明細書で説明される減衰回路の特徴を有する減衰回路を備える掘削孔用装置が提供されている。
【0044】
本発明の別の実施形態によると、本明細書で説明される装置を備える坑底アセンブリが提供されている。その装置はドリルカラーの(中心に配置された又は補助的な)一部であっても良いし、ゾンデ式(sonde-based)指向性装置であっても良いし、又は当該装置はビットの例えば約300mm内に配置されていても良い。
【0045】
発明のある実施形態においては、減衰回路は慣性センサの一体化した部分として提供されている。つまり、減衰回路は慣性センサの外部に存在しておらず、分離されてもいない。そのため、本発明の実施形態は閉ループのサーボ機構を有する慣性センサも提供しており、使用時に、慣性センサは、慣性センサの振動を表す信号が付与された出力電流を提供し、慣性センサは出力電流から少なくともいくつかの波形をフィルタリングするための静電容量を有する減衰回路を備えており、減衰回路は減衰回路によってもたらされるフィルタリング効果を向上するために出力電流の波形部のためのシンクを備えることを特徴とするように配置されている。そのような慣性センサは本明細書で説明される減衰回路の特徴を有しても良い。さらに、そのような慣性センサは本明細書において説明され、意図された実施形態を利用していても良い。
【0046】
本発明の様々な実施形態において、掘削孔を誘導する方法が提供されており、その方法は以下の段階を有する:
ドリルストリングを用いて地表に掘削孔を掘削する段階、ドリルストリングの下端は、ドリルビット、エアーハンマー又はジェットドリルなどの掘削機構を備える坑底アセンブリである;
掘削中に、前記坑底アセンブリの一部である装置を用いて掘削孔の向きに関する測定を行う段階;
段階(ii)の間に、前記装置の一部である慣性センサから出力電流を受ける段階、その装置は、出力電流上に波状に重ねられた掘削による不要な振動を受けやすく、出力電流から少なくともいくつかの波形をフィルタリングする静電容量を有する減衰回路を備えており、出力電流の波形部に対するシンクを提供することによって減衰回路によりもたらされるフィルタリング効果を増幅する段階を有する。向きに関する測定は、基準位置に関する向き、RPMデータ、ガンマ線ビニングデータ、及びドリルストリングのスティック/スリップ測定値を提供しても良いし、これらを提供するために用いられても良い。限定はされないが、掘削方法は、油/ガス/水を発見するための(垂直及び水平な)井戸の構築、(例えば、河川又は他の地形的な障害物を越える場合に)地下へのパイプラインの敷設、及び地熱目的の孔の掘削に有用である。油及びガスの分野において、この掘削法は特に回転操縦掘削及び地中誘導に有用である。
【0047】
本発明のより良い理解のために、添付の図面が単なる例示として参照される。
【図面の簡単な説明】
【0048】
【図1】図1は、指向性装置において加速度計と共に用いるための周知の第1の信号処理回路の一部の模式図である。
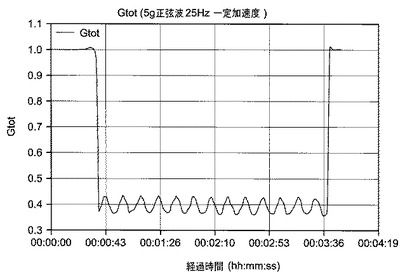
【図2】図2は、図1の回路を用いた振動実験の時間に対するGtotのグラフである。
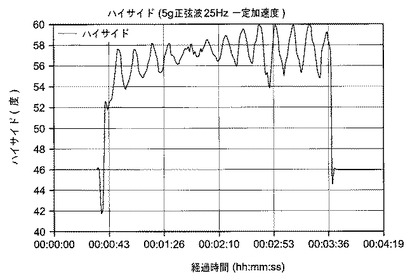
【図3】図3は、図1の振動実験における時間に対する装置のハイサイドのグラフである。
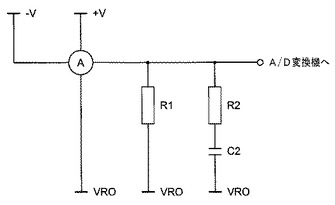
【図4】図4は、指向性装置において加速度計と共に用いるための周知の第2の信号処理回路の一部の模式図である。
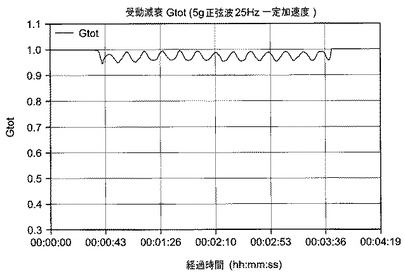
【図5】図5は、図4の回路を用いた振動実験の時間に対するGtotのグラフである。
【図6】図6は、図4の振動実験における時間に対する装置のハイサイドのグラフである。
【図7】図7は、使用状態にある本発明の指向性装置の模式図である。
【図8】図8は、本発明の指向性装置の模式的なブロック図である。
【図9】図9は、本発明において用いられている加速度計の模式的なブロック図である。
【図10】図10は、本発明の減衰回路の一実施形態の模式的なブロック図である。
【図11】図11は、図10の回路を用いた振動実験の時間に対するGtotのグラフである。
【図12】図12は、図10の振動実験における時間に対する装置のハイサイドのグラフである。
【図13】図13は、本発明の減衰回路の別の実施形態の模式的なブロック図である。
【図14】図14は、本発明の減衰回路の別の実施形態の模式的なブロック図である。
【発明を実施するための形態】
【0049】
図7を参照すると、ドリルリグ10がドリルストリング12を用いる掘削作業を制御しており、ドリルストリング12は末端同士がねじ係合されたドリルパイプ14を備えている。ドリルリグ10は、油田、公益事業、採鉱、又は地熱用のドリルリグなどであり、浮遊及び地上リグ、可動及び傾斜リグ、潜水型、半潜水型、プラットフォーム型、ジャッキ・アップ型、及び掘削船を含む。坑底アセンブリ(BHA)16はドリルストリング12の下端に位置している。一般的なBHA16は、(例えば、有線遠隔測定システム、マッドパルス遠隔測定システム、電磁式遠隔測定システム、音響遠隔測定システム、又は有線パイプ式の遠隔測定システムである)MWDトランスミッタ18、セントラライザー20、(ゾンデであっても良いし、カラーに取り付けられていても良い)指向性装置22、マッドモータ24、屈曲部26、(固定式又は可変式の)スタビライザ及びドリル機構28を備えており、ドリル機構28は、電気で駆動されるか、又はより一般的には圧縮空気、水、泡、又は泥などの掘削流体によって動力を得る。
【0050】
ポンプ30は地表に配置されており、使用時には、マッドモータ24に動力を供給するためにドリルストリング12を介して掘削流体を圧送し、地表における掘削者及び/又は掘削制御装置(図示しない)の管理下においてドリルビットに重量がかかるとマッドモータ24がドリルビット28を回転させることで掘削効果が得られる。掘削流体は掘削中にドリルビット28から離れてビットを冷却及び潤滑し、ドリルストリングと掘削孔(図示しない)との間に形成された環状空間において切り取ったものを地表に戻すように作用する。
【0051】
図8を参照すると、指向性装置22はゾンデの形状の円筒ハウジング32を有する。ハウジング32は管状であり、(ステンレス鋼、ベリリウム銅、又はオーステナイトステンレス鋼などの)非磁性材料、非金属複合体、又は当該技術分野において周知である他の好適な材料で作られている。ある実施形態においては、従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。または、掘削流体で作動する発電機及び制御装置が当該分野において周知の機器に動力を供給するために使用される。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’、及びバッテリーパック43などの様々な部品が指向性装置34の内部に搭載されている。模式的に示されているように、三個の慣性センサ44、46、48のそれぞれに一つが対応するよう三個の減衰回路36がある。
【0052】
以下の説明は掘削流体パルス遠隔測定システムについてなされているが、本明細書において記載されており本分野において周知の他の遠隔測定方式にも適用可能である。指向性装置22によって得られた測定結果を表すデータはパルスを用いて地表へと伝送され、当該パルスは、ドリルストリング12の内部において掘削流体を介して伝達される圧力のパルスである。パルスは、マッドパルス遠隔測定ユニット42の制御下において(圧力パルストランスミッターを備える)マッドパルサー18によって生成される。再度図7を参照すると、スタンドパイプ圧力変換機50が、ポンプ30からドリルストリング12へと掘削流体を輸送するライン52における圧力を検出する。スタンドパイプ圧力変換機50は、その圧力を代表する信号をデコードインターフェースボックス54へと送信し、デコードインターフェースボックス54は、信号をデコードするためのソフトフェアを有しており且つ指向性装置22によって得られた測定値を、この実施例においては掘削者のディスプレイ56及びラップトップ58を含むディスプレイに出力するPLCを備える。
【0053】
指向性装置22によってもたらされるグラビティツールフェースの測定結果を用いることにより、地表の掘削者は井戸の軌跡を制御することが出来る。もしくは、デコードボックスからの出力が、グラビティツールフェースの測定結果を利用する別のPLCに入力されることによって、自動的に又は半自動的に軌跡を制御することができる。
【0054】
一般に±1°の好ましい正確性をもたらすグラビティツールフェースの表示を得ることは重要である。上述したように、慣性センサからの出力を処理する従来の回路は、表示をしない、及び/又は信頼性、反復性などの別の問題を生じており、装置の内部により多くのスペースを必要とした。
【0055】
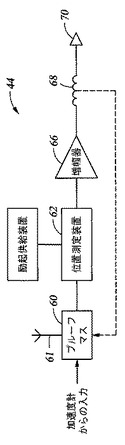
図9は、一つの慣性センサ44(慣性センサ46及び48のそれぞれは同一である)のブロック図である。この実施形態において、慣性センサ44は従来型の加速度計を備えている。加速度計44はプルーフマス60(すなわち、高い精度で分かっている質量)を備えており、プルーフマス60は可撓性のクオーツヒンジ61を介して加速度計の本体にヒンジ接続されている。(通常は容電性位置測定装置である)位置測定装置62はマスのいずれかの側においてエンドストップに対するプルーフマス60の位置を測定する。励起供給装置64は位置測定装置62に動力を供給し、位置測定装置62の出力は、プルーフマス60をその平衡位置に保持するトルカコイル68を介して電流を流すために増幅器66によって増幅される。トルカコイル68からの出力電流は出力ピン70に到達する。この電流は、以下においてより詳細に説明される外部抵抗によって電圧に変換される。使用において、加速度計44がトルカコイル68に十分な電流を供給することによって、プルーフマス60を捕捉した状態を維持できる。しかし、ある実施形態においては、加速度計は低電圧の電力供給(例えば、±12V)によって稼動されており、通常は、供給可能な電流量には制限がある。加速度計の検出軸における振動が十分な大きさに達する場合、電流出力は飽和し、プルーフマスは捕捉状態に維持されない。他の従来型の慣性センサ、好ましくは閉ループフィードバックサーボ機構を備える慣性センサは、加速度計の代わりに使用可能である。ある実施形態において、サーボ機構のフィードバックの少なくとも一部は、減衰回路36などの外部回路による処理及び操作のために慣性センサの外部で利用可能である。別の実施形態においては、減衰回路36などの外部回路は、フィードバックループが外部からアクセス可能である又はアクセス不可能であるように、慣性センサと一体化することもできる。
【0056】
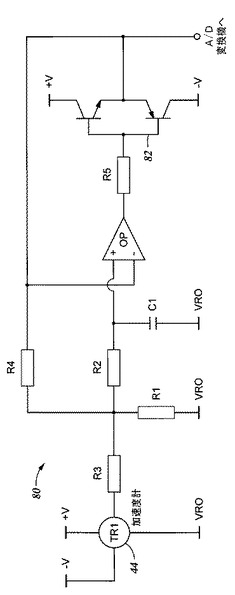
図10は、本発明の実施形態における減衰回路80のブロック図である。回路80は、加速度計44に接続されて示されている。抵抗R3は、加速度計44からの電力の大きさを制限することによって回路80を保護している。抵抗R1は加速度計から出力された電流を電圧に変換している。この実施形態において、加速度計の出力は3.0mA/G±5%であり、(振動が無い)1Gにおいて、±1.24VのDC電圧はR1を介して低下される。DC電圧は、掘削孔における加速度計44の検出軸の回転位置に応じて二つの値の間で変動する。低域フィルターはR1を介して接続されており、抵抗R2及びコンデンサC1の組み合わせによって形成されている。C1を介する電圧は、ユニティーゲイン構成に形成されたオペアンプOPに入力される。本明細書に開示されている発明の実施形態は市販されている好適な電子部品及びハードウェアを利用して実施可能であることが当業者に理解される。
【0057】
オペアンプOPから出力される電流は、抵抗R5によって制限されており、ゲインを有する電流フォロワとして機能する電流バッファー増幅器82に入力される。電流バッファー増幅器は、加速度計44からのバイポーラ電流を扱うために、相補的な一対のトランジスタを備える。正電流と負電流との間におけるオペアンプOPの最大切り替え周波数は、バッファー増幅器中のトランジスタがオン・オフを切り替えることができる最大周波数よりも低いことが好ましい。
【0058】
抵抗R5及び電流バッファー82はある高振動の状況において有用であるが、ある状況においてはそのような大きな振動に対する保護が必要ないため、これらの部品はオプションである。
【0059】
シャント抵抗R4は、抵抗R1、R2及びR3の分岐点とオペアンプOPのネガティブフィードバックとの間に接続されている。この回路における全ての能動部品、すなわち加速度計44、オペアンプOP及び電流バッファー増幅器82は、同一の電力供給機(例えば、バッテリーパック43)から電力を供給されている。
【0060】
使用において、加速度計44の検出軸に位置する指向性装置22の振動が無いと仮定すると、コンデンサC1は加速度計からの電流によって迅速に充電され、オペアンプOPの非反転入力における電圧は充電されたコンデンサを介するDC電圧になるであろう。ネガティブフィードバックを介して、オペアンプOPはほぼ正確に同一である非反転入力における電圧を維持するため、電流は回路内を流れない。
【0061】
ここで、指向性装置22が掘削による振動をうけると仮定すると、加速度計44からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし、コンデンサC1が電流を吐き出す又は吸い込むことによってコンデンサC1を通る電圧に対する変化に抵抗しようとし、周知であるように、コンデンサのリアクタンスは周波数と共に増加し、そのために高周波数の部品はより容易に地面へと短絡するため、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。低域フィルターの理論上の遮断周波数fcは100〜300Hzの範囲である。しかし、シャント抵抗R4の存在により、オペアンプOPはコンデンサC1の代わりに電流を供給及び吸収できるため、C1の静電容量を効果的に増加させ、低域フィルターの遮断周波数fcを小さくする。特に、数Hz以上の周波数において、R2及びR4を介する電圧の低下はほぼ同じであり、そのため、抵抗R2を通るよりも比較的大きな電流が抵抗R4を通る。抵抗R4を通る電流はR2/R4倍だけ大きい。この大きな電流は(その時点における加速度計からの出力電流の極性に応じて)オペアンプOPによって供給又は吸収され、オペアンプOPは反転入力における電圧を非反転入力における電圧と同じに維持しようとする。非反転入力における電圧のみが装置の向きの変化に応じて変わるため、オペアンプOPは、その出力における電圧をDCレベル付近に維持するが、高い周波数の電流を地面へ供給及び地面から吸収する。そのため、回路はC1の静電容量がR2/R4倍大きいようにする。これは、コンデンサC1を物理的に大きくする必要なく、遮断周波数fcを小さくする。
【0062】
対照的に、抵抗R1を介する電圧の遅い変化は、コンデンサC1に蓄えられたDC電圧に影響を与える。このようにして、オペアンプの非反転入力における電圧は、加速度計44の検出軸が重力ベクトルに対してどのように移動するかを示すための範囲にわたってゆっくりと変化する。
【0063】
ソリッドステートの電子機器を用いて小さなセラミックのコンデンサC1の容量効果を増幅することにより加速度計の出力において効果的に大きな減衰コンデンサを擬態することは、加速度計がプルーフマス捕捉を更に高い振動周波数に保持することを可能にし、ADCの捕捉範囲に減衰回路のDC出力を維持するAC経路をトルカ電流に付与する。さらに、能動回路設計は高い反復性を有しており、結果的に関連する熱補正及び熱ドリフトが容易にモデル化できると共に補正できるため、作動する温度範囲にわたってDC成分の正確性を維持できる。
【0064】
当該分野において、掘削者はX、Y及びZ軸のそれぞれの傾きを0.1°近くまで知りたいであろう。軸を中心とするそれぞれ0.1°の回転は、約±1mGのGの変化に相当する。ある実施形態においては、ADC38は±2Vの入力範囲と、12ビットの分解能を有しており、それは0Vから2Vの2048サンプルレベルに相当する。したがって、0から1Gの範囲において1mGを分解するためには、少なくとも1000のサンプルレベルが必要であり、それは、1GにおけるADCへの最小入力電圧0.97mV×1000=0.97V〜1Vに相当する。これよりも高い入力電圧は振動が原因であり、入力電圧のピークが2Vを超えると、ADC38は捕捉を失い、整流エラーが起こる(図2参照)。振動が非常に高いピークGであると、整流エラーが多分80°又は90°に匹敵する数十度以上のグラビディーツール測定におけるエラーを生じる可能性がある。これは、実際に補正が必要ない場合に補正をするために掘削の軌跡を調節しようとしてしまうため、掘削者にとって非常に問題である。より高い分解能のADC(例えば16ビット)を使用することにより、同じ1mGの精度をもたらすために入力電圧を低減可能であることが理解される。
【0065】
オペアンプOPから出力されるDC電圧はADC38へと入力される。回路80の周波数減衰性により、ADCが整流エラーの原因となる信号を捕捉し損なうことはほとんどない。これは、掘削中に掘削者がグラビティツールフェース測定に大きな信頼を抱くことができることを意味する。回路80から出力されるDC電圧の安定性の向上により、振動によるADCの切り取りが多分少なくてよいため、大きなDC電圧を出力するために精密な抵抗R1の値を上昇させることが可能である。これは、グラビティツールフェース測定の精度が向上されるため、非常に有益である。
【0066】
本発明の実施形態は従来型のADCを用いて実施することが可能である。使用において、ADCは設定時間にわたって順番に三つの減衰回路のそれぞれを(数百kHzにおいて)繰り返しサンプリングし、それぞれのチャネルのサンプルをデジタル処理回路40へと出力するようにプログラミングされている。この回路はそれぞれのチャネルのサンプルを相加的に平均化することによって、平均傾度を得ることができる。そして、三つの値は、それらが1Gを増大することをチェックするために、それらのベクトルの合計を決定するために用いられる。その後、グラビティツールフェース測定値は各軸の平均傾度と磁力計の測定値とを用いて決定される。そして、グラビティツールフェース測定値は、マッドパルス遠隔操作ユニット42とマッドパルサー18とを用いて地表へと伝達される。そして、掘削者に次のグラビティツールフェース測定値を提供するために、処理は設定時間後に繰り返される。
【0067】
図11及び12は、図2及び3に関して説明された実験と同様の実験の結果であり、その実験は回路80を備える指向性装置22において行われた。装置の振動は約40秒後に開始された。図11から明らかであるように、Gtot出力における整流補正エラーはほとんど又は全く無い。図12においても、指向性装置22のハイサイド測定値に誤差は無い。回路の出力電圧は、適切な平均化手法を用いて測定されており、非常に安定な16Gまでの振動と利用可能な20Gまでの振動として示されており、これは最大175℃で行われているが、適切な高温で利用可能な電子部品を選択することによってより高い温度でも可能である。そのような適切な平均化手法は、ADCにおいて可能なサンプリング頻度において(それぞれの磁力計の出力後に)順番にそれぞれの加速度計44,46,48の出力を読み取ること、メモリに結果を記録すること、一連の読み取りを繰り返すこと、及びそれぞれの加速度計の出力値の相加平均を得ることを含む。そして、これらの平均値はGtotの測定値をもたらすために組み合わせられたベクトルである。
【0068】
減衰回路の機能性は、例えばガンマ線測量装置などの他の掘削孔用装置に利用可能である。この測定もグラビティツールフェースに基づいているため、改良されたグラビティツールフェース測定は、ガンマ線測定装置のクリスタルの特定のビニングウィンドウが中央に位置することをより確実に掘削者が知るようにできる。
【0069】
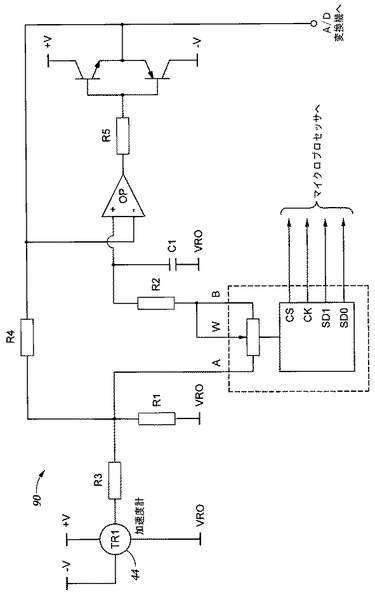
本発明の実施形態の減衰回路の機能性は、回路の減衰効果を変更可能にすることによって、更に改良可能である。そのような変更可能性はマイクロプロセッサの制御によって提供可能であるため、もたらされる減衰は使用中に掘削孔において調節可能である。そのような変更可能性は一つの装置の機能性を非常に向上させ、慣性センサの出力信号において異なる減衰効果が必要な機能、例えば非常に低い遮断周波数を必要とする(例えば、グラビティツールフェース測定の傾度の測定が±0.1°の精度を通常は必要とする)機能、及びより高い遮断周波数を必要とする(例えば、掘削及び/又はドリルストリングのスティック/スリップ中におけるRPMの測定)機能を実行可能にする。減衰効果の調節によって、回路は必要とされる特定の機能に適合可能である。変更可能な減衰効果の二つの例示的な実施形態を以下において説明する。
【0070】
図13を参照すると、減衰回路の別の実施形態は参照番号90によって全体が特定される。回路90は、全体的に回路80と似ており、同様の部品を示す同様の番号を有している。回路90は、実効抵抗R2を変更可能にする可変回路素子を備えている。この実施形態における追加の可変回路素子は、マイクロプロセッサの制御下において減衰周波数の細かな又は荒い調節を可能にするデジタルポテンショメータ92(市販されている好適なデジタルポテンショメータが使用可能である)を備えている。特に、デジタルポテンショメータ92は抵抗R2を介する電圧の低下、ひいてはそこを流れる電流を制御している。電流が増加すると、R2/R4の比率が低下し、C1の実効静電容量が低下する。このようにして、回路の遮断周波数は大きくなる。反対に、R2を介する電流がポテンショメータ92を用いることで低減すると、R2/R4の比率が増大し、C1の実効静電容量が増加する。このようにして、回路の遮断周波数は小さくなる。(例えばデジタル処理回路40における)マイクロプロセッサは図2及び3並びに図5及び6に示されるものと同様の整流補正効果のための出力信号をモニタリングできる。検出されると、マイクロプロセッサは補正を低減又はほぼ除去するためにポテンショメータ92を調節する。
【0071】
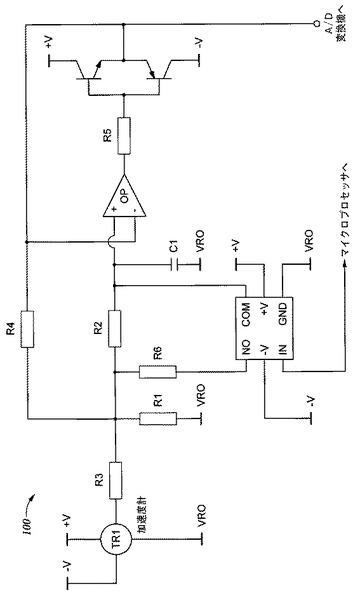
図14を参照すると、減衰回路の別の実施形態は参照番号100によって全体が特定される。回路100は全体的に回路80と似ており、同様の部位を示す同様の番号を有している。回路100は、抵抗R2と平行な抵抗R6への切り替え接続を提供するアナログスイッチ102(市販の好適なアナログスイッチが使用可能である)を備えている。スイッチ102の制御はマイクロプロセッサ(図示しない)のポートピンを介して行われる。抵抗R6において切り替えることによって、R2の実効抵抗は低下し、R2/R4の比率が低下するため、C1の実効静電容量が低下する。このようにして、減衰回路の遮断周波数は大きくなる。回路から抵抗を切り替えることによって、遮断周波数を小さくできる。図2と同様に、抵抗R6はデジタル処理回路40における出力に応じて回路から及び回路へと切り替えることができる。本発明の実施形態は、掘削による振動を受ける指向性装置によって、掘削孔内におけるグラビティツールフェース、傾き、アジマス、位置及び回転のパラメータの組み合わせである測定を改善することができる。
【0072】
本発明の一つ以上の実施形態から利益を得る地中での掘削中測定(MWD)の範囲及び軌跡制御の応用は、限定はしないが、1.磁気により(開坑において)位置決め及び測量する操縦システム、2.能動的に「迅速に」位置決め及び測量する操縦システム、3.方向及び位置のジャイロにより位置決め及び測量する操縦システム、4.わずかな傾きに近い位置決め及び測量(地理的操縦)の利用、5.空気掘削及びコイルチュービングのアンダーバランス掘削の位置決め及び測量の利用、6.動的なMWDの傾きの回転掘削及び測量、7.回転操縦可能なロールが安定化されたプラットフォーム及び能動的グラビティツールフェース制御のいずれかを含む。
【0073】
本発明の減衰回路の実施形態は、限定されないが、オイル、ガス、及び水の井戸の掘削及び測量、地熱、トレンチレス、及び渡河HDD用途(例えばパイプ、ケーブルなど)を含む掘削作業に利用される全ての態様の掘削孔用装置に有用である。また、本発明はほぼ垂直な掘削孔の掘削作業に利用可能である。
【0074】
本明細書において開示される減衰回路の実施形態は、装置のプリセッションによるトルクの測定がトルカコイルの電流によって「ゼロ」にされるジャイロスコープなどのサーボ「プルーフマス」又は「スピニングマス」原理を利用するストラップダウン回転センサ又は回転プラットフォームを有する掘削孔用回転センサの閉ループサーボ設計に利用可能である。
【0075】
本明細書に開示される技術は、本明細書に説明される処理を行うアルゴリズムを有するように構成されたソフトウェアにより完全に自動化/自立化可能であることが当業者に理解される。実施形態は、適切なハードウェアを備える一つ以上の汎用コンピュータをプログラミングすることによって実施可能である。プロセッサにより読み取り可能であり、本明細書において説明される作業を行うためにコンピュータによって実行可能な指示の一つ以上のプログラムをエンコードする一つ以上のプログラム記憶装置を利用することによって、プログラミングは実施される。プログラム記憶装置は、例えば一つ以上のフロッピー(登録商標)ディスク、CD−ROM、又は他の光学ディスク、磁気テープ、リードオンリーメモリーチップ(ROM)、及び周知又は今後開発される他の形態をとり得る。指示のプログラムは、「オブジェクトコード」、すなわち、コンピュータによってほぼ直接実行可能な二進法形態、実行前に編集又は解釈が必要な「ソースコード」、又は部分的に編集されたコードなどの中間形態である。プログラム記憶装置及び指示のエンコードの正確な形態はここでは重要ではない。また、発明の実施形態は、(装置に備えられた適切なハードウェア/ソフトウェアにより)掘削孔内、地表、及び/又はその組み合わせにおいて説明された機能を実行するよう形成されている。
【0076】
本開示は本発明の特定の実施形態を説明しているが、本明細書において説明されている部材の同等の機能及び/又は構造的な代替の利用を含む多数の改良及び変形が、本開示を検討した後に当業者に明らかになるであろう。例えば、本発明の実施形態は従来の遠隔測定システム(例えば、マッドパルス、光ファイバー、ワイヤーシステム、有線ドリルパイプなど)と組み合わせた作業のために実装できる。開示された技術は特定の種類の伝送手段又は地下での作業に限定されない。例えば、本発明の実施形態は、LWD/MWD、移動掘削、海底作業などの作業に非常に適している。当業者にとって明らかなそのような全ての同様の変形は、添付の請求項によって規定される発明の範囲内であることが意図されている。
【技術分野】
【0001】
本発明の実施形態は地下で使用される装置に関連し、特に、掘削孔用の装置/機器を稼働するための回路設計に関連する。
【背景技術】
【0002】
傾斜掘りは、油及び/又はガスを発見するために、及び多用途の水平方向掘削(HDD)部のために、垂直でない井戸を掘るために利用されている。これは、坑底アセンブリ(BHA)としても知られるドリルストリングの最下部を制御することによって実現できる。通常、BHAは(垂直なドリルストリングにおいて下から上に)ビット、(操縦可能なシステムに屈曲をもたらす)マッドモータ、スタビライザ、ドリルカラー、重量ドリルパイプ、ジャーリング装置(「ジャーズ」)、及び様々なねじ形状に重複する部分を有する。BHAはビットに力を加えることによって、(ビットにのしかかっている)岩を砕き、厳しい機械環境を乗り切り、井戸の方向の制御を掘削機にもたらす。BHAは、マッドモータ、傾斜掘り及び測定用装置(「指向性装置」)、測定掘削機器、記録掘削機器、及び他の特殊な装置を有する場合もある。
【0003】
通常、垂直から外れた井戸を掘るために、(マッドモータのハウジングの上又は中に配置された)屈曲部がビットの長手軸を約0.5°から3.0°だけドリルストリングの軸から離して配置する。ドリルストリングの先端におけるこのわずかな方向の変更は、井戸内でビットにかかる重量及び/又は屈曲部の角度位置を調節することによって掘削方向を調節可能にするのに十分である。ビットにかかる力が大きいほど、井戸の現在の軸から大きく外れさせ、逆も同様である。
【0004】
希望する目的地へと、たぶん所定の経路に沿って地表から到達するように掘削の方向をモニタリングすることが重要である。この目的のため、その機能が屈曲部の現在の位置を示すデータを地表に送ることである指向性装置をBHAは有しているため、必要であれば、ドリルストリングを回転させる及び/又はビットにかかる重量を調整することによって調節が可能である。指向性装置はマッドモータより下に配置されている場合もある。
【0005】
現在、磁性指向性装置は、ほぼ油井構造物及び(例えば、河川を横断する)実用的な水平方向の掘削部内において開孔の傾斜掘削孔の掘削軌跡のモニタリング及び制御においてのみ使用されている。通常は、指向性装置はドリルストリングのBHAの軸に沿って設置されている。
【0006】
指向性装置は多数のセンサを備えており、センサの出力情報は機器(ひいてはビット)の方向を決定するために解析可能である。センサは、垂直な三つの慣性グレードの加速度計と、三つの垂直な精密磁力計とを備えており、装置の本体の姿勢がそこから発せられる地球の重力及び磁界に関する装置のベクトル測定結果から決定される場合もある。磁力計及び加速度計は指向性装置内に設置されており、それぞれの種類の一つがX、Y、及びZ軸に向けられている。通常、X及びY軸は相互に垂直であり、指向性装置の長手軸に対して垂直である。通常は、Z軸はX及びY軸の両方に垂直であり、指向性装置の長手軸に平行である。装置のハイサイドは、装置のZ軸上であり且つZ軸に沿った垂直面に対する(通常は重力X又は重力Y軸から測定される)側部装置の参照からの(通常は360度にわたって回転される)回転角である。
【0007】
BHAに指向性装置が搭載されると、通常は、屈曲部が向く(BHAの軸に垂直な)角度方向と指向性装置のハイサイド角との間にいくらかの角度のずれが生じる。この角度のずれはBHAが掘削孔内に移動する前に現地で測定される。このずれは指向性装置からもたらされる方位基準を調整するために利用され、掘削者には掘削孔のハイサイドから曲がっているBHAの角度の測定結果について情報が提供される。掘削孔のハイサイドからの屈曲部の角度方向の表示は、「グラビティツールフェース(gravity toolface)」測定として知られている。この方向は、ツールフェイスがつけられた丸いダイヤルにおいて掘削者に表示される場合もある。使用時には、それぞれのセンサからの出力がアナログからデジタルへと変換され、サンプルは平均化されて他のセンサの出力と共に処理されることによって、グラビティツールフェース測定を行うことが出来る。
【0008】
通常は、「ケリーダウン(kelly down)」の終了後であり且つスタンド又はドリルパイプの追加及び掘削活動の再開前においてドリルストリングが固定されているときに、掘削孔の測量は行われる。これらの状態においては、ドリルパイプは固定されており、指向性装置からの安定した測定値が容易に得られる。
【0009】
操縦可能な(摺動)アセンブリを用いて掘削することによって、ドリルビットを駆動するための電力がBHA内のマッドモータから得られる場合、掘削方向の制御は掘削リグの回転テーブル又は最上部の駆動によるBHAの回転位置によって影響を受ける。そのような装置は掘削と操縦を同時に行うことを可能にする。しかし、BHAが(通常5−500Hzの範囲の周波数であるランダムな3軸方向の振動である)掘削により生じる振動にさらされるため、掘削中に行われるグラビティツールフェース測定は安定しない又は測定値に過度の変動をもたらす。このことは井戸の方向の正確な追跡をより困難にしており、環境によっては、井戸の方向を確認するために定期的に掘削が中断される。
【0010】
それにも関わらず、あるオペレータは、操縦可能なアセンブリの運転中に「急いで測量(surveys on the fly)」を行い、迅速なデータ取得及び高度な平均化技術に頼ることによって、定量的な操縦及び測量のデータを得ることを試みている。
【0011】
例えば、ビットにおける傾斜などの測量取得及び軌跡制御、回転アセンブリの傾斜及び測量、地理誘導、及び回転操縦システム(RSS)などの指向性装置を利用する他の回転掘削及び操縦の利用もあり、後者は能動的なグラビティツールフェース制御又は完全な(傾斜及び方位角の)追跡制御のための慣性プラットフォームの回転安定化を利用している。そのような利用においては、指向性装置のセンサも掘削により生じる振動によって機能が損なわれる。
【0012】
上記の全ての用途において、掘削により生じる振動は非常に深刻であり、センサの出力は飽和し、データ取得及び平均化技術によって処理できない非直線性を生じる。
【0013】
油井建造及び公益事業は、地球の重力場(G)の測定のために市場で入手可能な様々なサーボ機構の加速度計を利用しており、正確な測定のための産業的な標準はクオーツの可撓性ヒンジ装置である。これらは一般に閉ループ構造であるため、整流トルカ(torquer)コイルを流れる電流はプルーフマスの位置にサーボ制御され、制御はプルーフマスを平衡又はゼロ位置に維持しようとする。トルカ電流の大きさは加速度計が感知する軸に作用する重力場の測定値である。
【0014】
図1は、そのような加速度計Aからの出力を処理するための周知の回路の一部を示している。加速度計Aが静止していることを前提とし、加速度計Aはその検出軸に沿った加速に比例する安定した電流を出力する。装置の必要な方向の測定値を得ることを目的とする掘削において、加速度計からのDC出力のみが関与する。出力電流は精密抵抗R1によって測定可能なDC電圧に変換され、次に電圧はアナログ−デジタル変換機又はADC(図示しない)によって測定される。使用中に、指向性装置内の温度も測定され、装置及び電子機器に補正率を適用するために利用される。三つの加速度計が指向性装置に搭載されているため、上述したように装置のX、Y及びZ軸のそれぞれに沿った重力場の成分を測定することができる。これらの加速度計は、大きさ及び不整合誤差が最小化されるように、装置のハウジングに設置された後に較正及びモデル化される。したがって、加速度計の反復可能及び予測可能な機能はGのモデル化及び測定を正確にするために非常に重要である。
【0015】
現在、掘削産業においては、それぞれの加速度計によって提供される傾斜測定値に0.1°の精度が求められている。この精度のレベルは、指向性装置がそれぞれの加速度計の傾斜において1mGの変化を検出可能でなければならないことを意味している。市販の加速度計からの一般的な出力電流は約3.0A/Gであり、これは出力電流を処理する電気回路が3μA程度の出力電流の変化を分解可能でなければならないことを意味する。
【0016】
出願人はこの目的を実現する上での特有の問題を特定した。具体的には、現在は、精密抵抗を通る加速度計からの出力電流によって生じるDC電圧をサンプリングするために、事実上全ての指向性装置がADC変換機を利用している。それぞれのADCは一定の電圧捕捉範囲と一定数のビットの分解能とを有する。12ビットの分解が一般的であり、ビット数がいくつであろうと問題は同じである。要求されるレベルで分解するために、正負両方の入力電圧に対して少なくとも1000の量子化レベルを用いることが必要である。したがって、ADCの電圧捕捉範囲が掛けられる(1000/合計数の量子化レベル)で与えられるADCに必要な最小の電圧入力値が存在する。
【0017】
例えば、最大186の12ビットADCが一般に指向性装置で用いられている。これは±2Vの捕捉範囲を有しているため、所望される分解能を得るための回路からの最小入力電圧は±0.98Vから±1Vである。
【0018】
掘削が測量値を得るために停止されると、回路からのDC電圧は安定になり、ADCの捕捉範囲内に収まる。
【0019】
しかし、(操縦可能なアセンブリによって掘削する際に生じるような)振動状態においては、それぞれの加速度計からの出力はDC成分の頂点における不定期なAC様の波形の付加によって変化する。このAC波形は、振動状態におけるゼロ位置にプルーフマスをしっかりと保持するために必要な変更可能なトルカコイルの電流によって生じる。それにも関わらず、加速度のDC成分の抽出は検出システムの周波数帯域幅能力内で可能である。しかし出願人は、既存の回路における数G以上の振動に対する耐性は非常に悪いことを見出している。起こることは、回路からのDC出力がすぐにADCの捕捉範囲外に出てしまい、DC出力電圧の切り取りと整流エラーが生じ、数十度外れる可能性のあるグラビティツールフェース測定をもたらす。
【0020】
図2及び3は、図1に示されている回路を採用している指向性装置の反応を示している。装置はテストリグに向けられており、Z軸は水平であり、加速度計のX及びY軸はそれぞれ水平からプラス45°及びマイナス45°であった。指向性装置は垂直面において25Hzで5gの一定のピークである加速度で正弦波振動していた。図2において、X軸における時間に対して、Y軸は三つの加速度計のそれぞれからの加速度出力のベクトルの和(Gtot)を示している。振動が開始する前に、1Gtotの正確な測定値が装置から出力された。振動が開始するとすぐに、出力は0.4Gtotに変化し、それは振動の整流エラーによって起こる。上述したように、回路からの出力電圧がDC電圧が入力されるADCの電圧捕捉範囲を上回ることによって、このエラーは起こる。したがって、電圧はADCによって切り取られ、波形の正側及び負側のそれぞれにおいて切り取られた信号の比率が整流エラーの方向及び大きさを決める。図3は装置のハイサイドの出力におけるエラーを示しており、それは、装置が実際には全く回転していないときに軸が約10°回転したことを示している。使用に際して、この測定結果が上述した角度のずれと組み合わされることによって、ツールフェイスの測定値がもたらされる。これは10°だけ不正確であり、実際に何も必要とされない場合には、掘削者に掘削を停止させ、ストリングに対する回転補正を行わせる原因となる。
【0021】
図2のずれた部位の正弦様部分は実験中にADCによって行われたサンプリングのエイリアシング効果である。具体的には、サンプリングレートが約30分続いた実験全体に対して120サンプルのみであった。そのため、サンプリングレートがナイキスト基準を満たしておらず、入力頻度のエイリアシングが予測可能であった。それにも関わらず、実験が整流エラーの問題を示したため、このことは重要ではない。一般に、掘削孔測定において、加速度計からの出力信号は通常数百キロヘルツにおいてサンプリングされ、掘削によって生じる振動は通常5〜500Hzの範囲であるため、そのようなエイリアシングは実際には行われない。
【0022】
図1の回路に対する改良が図4に示されており、この後者の回路はしばらくの間当該分野において用いられてきた。図4の回路は、トルカコイル電流検出抵抗R1と平行にR2及びC2を備える低インピーダンス経路を用いている。これは、出力信号のAC成分において周波数のかなりの部分を地面に短絡する効果を有する。
【0023】
図5及び6は、図4の回路を採用している指向性装置における実験結果を示している。実験は図1の回路を用いて行った実験と同様に行った。明らかに分かるように、出力Gtotとハイサイドは振動整流エラーの減少を示しており、グラビティツールフェース測定が掘削中に行われた場合に改善された成果を示している。
【0024】
改善された成果にもかかわらず、図4に示される種類の回路及び類似の作動原理を採用している他の回路にはいくつかの問題が存在している。具体的には、コンデンサC2の遮断周波数(3dBポイント)がAC成分の大半を除去できるほど十分に低い場合、コンデンサC2は非常に大きいことが必要になる。一般的に必要な静電容量は100〜300μFの範囲である。そのような静電容量は多くの場合は湿式タンタルコンデンサによってもたらされるが、それは例えば15mmの直径×30mmの長さであり物理的に非常に大きい。湿式タンタルコンデンサは分極されているために(加速度計からの双極性振動に適合するためには)1個の加速度計につき2個のそのようなコンデンサが必要となるため、3個全ての加速度に対して6個のコンデンサが必要であるという事実によりその問題は悪化する。このことは、指向性装置内の回路に利用可能な空間のかなりの部分を使用してしまう。装置を小さくする産業上の圧力が存在する。例えば、従来のいくつかの指向性装置は、25mmから36mmの直径及び304mmの長さ(12インチ)の円柱空間内に適合しなければならない。したがって、省スペース化が可能であることが望まれる。
【0025】
更なる問題は、指向性装置は例えば−5℃から約175℃の広範な温度において長期間確実に作動しなければならないことである。高温においては、電解コンデンサが内部漏洩し、それは温度に対して非直線となる電流の漏洩を引き起こすことが知られている。その影響は信号処理の間に容易に補正できないために、このようなことは非常に好ましくない。
【0026】
装置の耐振動性のわずかな改善は、(例えば16ビットの)より大きな分解ADCを用いることによって行うことが可能であり、必要な定量化レベルの数値(例えば1000)はより小さな割合を占める。しかし、これはDC電圧の切り取りを防ぐことができず、整流エラーも存在する。
【0027】
したがって、問題を解決する又は上述したエラーを少なくする改良された装置及び機器の設計に対する需要がある。
【発明の概要】
【0028】
発明のある実施形態は、掘削孔における作業に用いられる装置を提供する。当該装置は、掘削孔における作業中に慣性データ信号を提供するように形成された少なくとも一つの慣性センサと、慣性データ信号における不要な振動の影響に対する減衰効果を提供するように形成された電子回路と、を備えており、慣性データ信号は不要な振動の影響を受け、電子回路は慣性データ信号への不要な振動の影響を補正するために静電容量効果を増幅するよう形成されている。
【0029】
本発明のある実施形態は、掘削孔用装置を運転する方法を提供する。当該方法は、掘削孔用装置に搭載された少なくとも一つの慣性センサを利用して掘削孔における作業中に慣性データ信号を取得する段階と、掘削孔用装置に搭載された電子回路を用いて慣性データ信号における不要な振動の影響に対して減衰効果をもたらす段階を有し、慣性データ信号は不要な振動の影響を受け、電子回路は慣性データ信号における不要な振動の影響を補正するために静電容量効果を増幅するよう形成されている。
【0030】
本発明のある実施形態においては、装置は、掘削作業の一部である掘削孔の形成において使用できる慣性データを提供するために閉ループサーボ機構を備える少なくとも一つの慣性センサを有しており、慣性センサは掘削孔の形成に関連して掘削孔にもたらされる不要な振動を受けやすく、使用中に不要な振動が慣性センサからの出力電流に波形として重ねられ、装置は出力電流から少なくともいくつかの波形をフィルタリングするための静電容量を有する減衰回路を備えており、減衰回路は出力電流の波形部に対するシンクを有することによって、減衰回路によってもたらされるフィルタリング効果を向上することができることを特徴とするように構築されている。掘削孔に生じる不要な振動は掘削により生じる振動を含むが、慣性センサの出力電流に影響を与える他のあらゆる掘削孔の振動も含む。ある実施形態においては、シンクは正及び負の両方の電流シンクとして機能し、シンクは波形の正及び負の部分の両方に作用する。慣性データは、限定されないが、以下の掘削作業の一つ又は組み合わせに有効である:掘削孔追跡誘導、地理誘導、回転誘導掘削、RPMデータ、ガンマ線ビニングデータ及びドリルストリングのスティック/スリップの測定、並びに垂直孔掘削。例えば、慣性センサによって提供される慣性データはセンサの検出軸に沿った加速度を表す。この目的に有用なセンサの一種は加速度計である。
【0031】
ある実施形態の一つの具体的な利点は、正確な測定値を提供している間に、少なくとも一つの慣性センサが掘削孔の振動源(例えばドリルビット)の近くに配置可能であることである。ツールフェイスの測定結果が実施のツールフェイスのより近くにおいて得られ、掘削追跡をより正確に管理できるため、このことは非常に有益である。
【0032】
ある実施形態において、閉ループサーボ機構のフィードバックの少なくとも一部が操作及び減衰回路による処理のために慣性センサの外部から利用可能になっている。別の実施形態においては、減衰回路は慣性センサの一部であり、慣性センサのハウジングの外部から利用可能なフィードバックの部分は無い。ある実施形態においては、シンクはコンデンサによって提供されている別の接地経路から分離した波形のための接地経路を備える。
【0033】
ある実施形態において、シンクは減衰回路における実効静電容量を増加させるためにソリッドステート回路を有している。ソリッドステート回路は、本明細書において提案されているように機能するように配置された複数の分離したトランジスタを有していても良い。もしくは、ソリッドステート回路はオペアンプを備えていても良い。
【0034】
ある実施形態において、シンクは、コンデンサを通り越した出力電流の一部をオペアンプの出力へとバイパスするために、ネガティブフィードバックオペアンプとシャント抵抗とを備えており、使用時に、オペアンプがコンデンサのために電流を供給すると共に電流を吸い込むため、減衰回路における実効静電容量を増加させることができる。
【0035】
減衰回路は、慣性センサからの出力電流をコンデンサを有する低域フィルターを介してオペアンプの非反転入力部へと入力するよう形成されていても良い。
【0036】
ある実施形態においては、電流バッファーがオペアンプの出力に付与されている。この構成の一つの利点は、オペアンプの電流出力が改善されることである。具体的には、高温(例えば約150℃以上)での発明の使用において必要となる種類のオペアンプ(例えば、低電力、高精度、小補正、小帯域幅)は、数ミリアンペアを超える電流を供給又は吸収できない。電流バッファーは電流量を増加させ、オペアンプは慣性センサからの波形出力を取り扱うために供給及び吸収できる。更なる利点は、この電流を供給及び吸収する放熱が1つより多くの複数の部品に広がることであり、このことは掘削孔における高温での使用に重要である。ある実施形態においては、シンクが静電容量増幅器を備えている。
【0037】
ある実施形態において、減衰回路は約100Hz未満の遮断周波数を有しているため、慣性センサの向きを意図的に変更することにより、静電容量を通して蓄えられている電圧、及び減衰回路によりもたらされる向きの出力表示を変更することができるが、出力電流における高周波数は静電容量を通した電圧をほぼ影響を受けないように放置する。いくつかの用途は他より多くの波形フィルタリング効果を必要とするため、出力電流にどれだけの波形が残されるかは、具体的な用途ごとに選択可能である。したがって、ある実施例においては遮断周波数は使用中に調節可能であるが、遮断周波数は目的の用途に合わせて設定可能である。例えば、より高い及びより低い周波数も選択できるが、回転操縦掘削用の一般的な遮断周波数は約10Hzである。例えばガンマ線検出、RMP、スティック/スリップなどの回転検出用途においては、遮断周波数は約30〜50Hzである。慣性センサの向きの意図的な変更は、例えば回転掘削及びツールフェイスを変更するためのドリルストリングの回転によって起こる。
【0038】
ある実施形態において、減衰回路は、掘削作業のガイドに用いるための慣性センサの相対回転位置を表すDC出力電圧を提供するために慣性センサからの出力電流を利用し、減衰回路はDC出力電圧をADCに入力するよう配置されており、ADCは、ADCからの出力において整流エラーを生じる入力電圧が抜き出されている上又は下の許容可能な入力電圧捕捉範囲を有しており、使用時においてDC出力電圧が減衰回路によってほぼ安定化されるように配置されているため、掘削中において、掘削による慣性センサの振動にも関わらず、DC出力電圧はADCの捕捉範囲内に実質的に存在する。ある実施形態においては、減衰回路によってもたらされる減衰又はフィルター効果は、DC出力電圧を装置におけるADCの捕捉範囲内に維持するように使用中に調節される。
【0039】
ある実施形態において、装置は三つの相互に垂直な慣性センサを有しており、それぞれが(個別に又は共同で)、各慣性センサからの出力電流上に波形として現れる掘削孔による振動をフィルタリングするための関連減衰回路を備えている。ある実施形態において、減衰回路はそこからもたらされるフィルタリング効果を変更するために調節可能である。この調節は現地の地上において、例えば使用の直前に行われる。
【0040】
別の実施形態においては、使用中に減衰回路が掘削孔において調節可能である。このことは、例えばツールフェイス測定装置とRPM又はスティック/スリップ測定装置との間で切り替えることが望まれる場合、異なる作業のために装置をコントロール及び使用可能にする。
【0041】
調節可能にするために、発明のある実施形態においては、減衰回路は可変回路素子を備えている。そのような可変回路素子は、例えばデジタル式のポテンショメータ又はアナログ式のスイッチである。回路素子の変化により減衰回路の遮断周波数を調節してもよい。
【0042】
ある実施形態において、装置は、約150℃を超える、可能であれば約175℃を超える温度の掘削孔における使用に適している。装置は、例えばセラミックで覆われており、サファイアの上にシリコンが乗ったソリッドステート部品などの好適な従来の回路部品を用いてより高い温度(例えば200℃)での使用に適するように作られていても良い。
【0043】
本発明の別の実施形態によると、掘削作業において掘削孔で使用され且つ慣性の基準を必要とする装置の使用のために、ハウジングと、ハウジングに設置された少なくとも一つの慣性センサと、本明細書で説明される減衰回路の特徴を有する減衰回路を備える掘削孔用装置が提供されている。
【0044】
本発明の別の実施形態によると、本明細書で説明される装置を備える坑底アセンブリが提供されている。その装置はドリルカラーの(中心に配置された又は補助的な)一部であっても良いし、ゾンデ式(sonde-based)指向性装置であっても良いし、又は当該装置はビットの例えば約300mm内に配置されていても良い。
【0045】
発明のある実施形態においては、減衰回路は慣性センサの一体化した部分として提供されている。つまり、減衰回路は慣性センサの外部に存在しておらず、分離されてもいない。そのため、本発明の実施形態は閉ループのサーボ機構を有する慣性センサも提供しており、使用時に、慣性センサは、慣性センサの振動を表す信号が付与された出力電流を提供し、慣性センサは出力電流から少なくともいくつかの波形をフィルタリングするための静電容量を有する減衰回路を備えており、減衰回路は減衰回路によってもたらされるフィルタリング効果を向上するために出力電流の波形部のためのシンクを備えることを特徴とするように配置されている。そのような慣性センサは本明細書で説明される減衰回路の特徴を有しても良い。さらに、そのような慣性センサは本明細書において説明され、意図された実施形態を利用していても良い。
【0046】
本発明の様々な実施形態において、掘削孔を誘導する方法が提供されており、その方法は以下の段階を有する:
ドリルストリングを用いて地表に掘削孔を掘削する段階、ドリルストリングの下端は、ドリルビット、エアーハンマー又はジェットドリルなどの掘削機構を備える坑底アセンブリである;
掘削中に、前記坑底アセンブリの一部である装置を用いて掘削孔の向きに関する測定を行う段階;
段階(ii)の間に、前記装置の一部である慣性センサから出力電流を受ける段階、その装置は、出力電流上に波状に重ねられた掘削による不要な振動を受けやすく、出力電流から少なくともいくつかの波形をフィルタリングする静電容量を有する減衰回路を備えており、出力電流の波形部に対するシンクを提供することによって減衰回路によりもたらされるフィルタリング効果を増幅する段階を有する。向きに関する測定は、基準位置に関する向き、RPMデータ、ガンマ線ビニングデータ、及びドリルストリングのスティック/スリップ測定値を提供しても良いし、これらを提供するために用いられても良い。限定はされないが、掘削方法は、油/ガス/水を発見するための(垂直及び水平な)井戸の構築、(例えば、河川又は他の地形的な障害物を越える場合に)地下へのパイプラインの敷設、及び地熱目的の孔の掘削に有用である。油及びガスの分野において、この掘削法は特に回転操縦掘削及び地中誘導に有用である。
【0047】
本発明のより良い理解のために、添付の図面が単なる例示として参照される。
【図面の簡単な説明】
【0048】
【図1】図1は、指向性装置において加速度計と共に用いるための周知の第1の信号処理回路の一部の模式図である。
【図2】図2は、図1の回路を用いた振動実験の時間に対するGtotのグラフである。
【図3】図3は、図1の振動実験における時間に対する装置のハイサイドのグラフである。
【図4】図4は、指向性装置において加速度計と共に用いるための周知の第2の信号処理回路の一部の模式図である。
【図5】図5は、図4の回路を用いた振動実験の時間に対するGtotのグラフである。
【図6】図6は、図4の振動実験における時間に対する装置のハイサイドのグラフである。
【図7】図7は、使用状態にある本発明の指向性装置の模式図である。
【図8】図8は、本発明の指向性装置の模式的なブロック図である。
【図9】図9は、本発明において用いられている加速度計の模式的なブロック図である。
【図10】図10は、本発明の減衰回路の一実施形態の模式的なブロック図である。
【図11】図11は、図10の回路を用いた振動実験の時間に対するGtotのグラフである。
【図12】図12は、図10の振動実験における時間に対する装置のハイサイドのグラフである。
【図13】図13は、本発明の減衰回路の別の実施形態の模式的なブロック図である。
【図14】図14は、本発明の減衰回路の別の実施形態の模式的なブロック図である。
【発明を実施するための形態】
【0049】
図7を参照すると、ドリルリグ10がドリルストリング12を用いる掘削作業を制御しており、ドリルストリング12は末端同士がねじ係合されたドリルパイプ14を備えている。ドリルリグ10は、油田、公益事業、採鉱、又は地熱用のドリルリグなどであり、浮遊及び地上リグ、可動及び傾斜リグ、潜水型、半潜水型、プラットフォーム型、ジャッキ・アップ型、及び掘削船を含む。坑底アセンブリ(BHA)16はドリルストリング12の下端に位置している。一般的なBHA16は、(例えば、有線遠隔測定システム、マッドパルス遠隔測定システム、電磁式遠隔測定システム、音響遠隔測定システム、又は有線パイプ式の遠隔測定システムである)MWDトランスミッタ18、セントラライザー20、(ゾンデであっても良いし、カラーに取り付けられていても良い)指向性装置22、マッドモータ24、屈曲部26、(固定式又は可変式の)スタビライザ及びドリル機構28を備えており、ドリル機構28は、電気で駆動されるか、又はより一般的には圧縮空気、水、泡、又は泥などの掘削流体によって動力を得る。
【0050】
ポンプ30は地表に配置されており、使用時には、マッドモータ24に動力を供給するためにドリルストリング12を介して掘削流体を圧送し、地表における掘削者及び/又は掘削制御装置(図示しない)の管理下においてドリルビットに重量がかかるとマッドモータ24がドリルビット28を回転させることで掘削効果が得られる。掘削流体は掘削中にドリルビット28から離れてビットを冷却及び潤滑し、ドリルストリングと掘削孔(図示しない)との間に形成された環状空間において切り取ったものを地表に戻すように作用する。
【0051】
図8を参照すると、指向性装置22はゾンデの形状の円筒ハウジング32を有する。ハウジング32は管状であり、(ステンレス鋼、ベリリウム銅、又はオーステナイトステンレス鋼などの)非磁性材料、非金属複合体、又は当該技術分野において周知である他の好適な材料で作られている。ある実施形態においては、従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。または、掘削流体で作動する発電機及び制御装置が当該分野において周知の機器に動力を供給するために使用される。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’、及びバッテリーパック43などの様々な部品が指向性装置34の内部に搭載されている。模式的に示されているように、三個の慣性センサ44、46、48のそれぞれに一つが対応するよう三個の減衰回路36がある。
【0052】
以下の説明は掘削流体パルス遠隔測定システムについてなされているが、本明細書において記載されており本分野において周知の他の遠隔測定方式にも適用可能である。指向性装置22によって得られた測定結果を表すデータはパルスを用いて地表へと伝送され、当該パルスは、ドリルストリング12の内部において掘削流体を介して伝達される圧力のパルスである。パルスは、マッドパルス遠隔測定ユニット42の制御下において(圧力パルストランスミッターを備える)マッドパルサー18によって生成される。再度図7を参照すると、スタンドパイプ圧力変換機50が、ポンプ30からドリルストリング12へと掘削流体を輸送するライン52における圧力を検出する。スタンドパイプ圧力変換機50は、その圧力を代表する信号をデコードインターフェースボックス54へと送信し、デコードインターフェースボックス54は、信号をデコードするためのソフトフェアを有しており且つ指向性装置22によって得られた測定値を、この実施例においては掘削者のディスプレイ56及びラップトップ58を含むディスプレイに出力するPLCを備える。
【0053】
指向性装置22によってもたらされるグラビティツールフェースの測定結果を用いることにより、地表の掘削者は井戸の軌跡を制御することが出来る。もしくは、デコードボックスからの出力が、グラビティツールフェースの測定結果を利用する別のPLCに入力されることによって、自動的に又は半自動的に軌跡を制御することができる。
【0054】
一般に±1°の好ましい正確性をもたらすグラビティツールフェースの表示を得ることは重要である。上述したように、慣性センサからの出力を処理する従来の回路は、表示をしない、及び/又は信頼性、反復性などの別の問題を生じており、装置の内部により多くのスペースを必要とした。
【0055】
図9は、一つの慣性センサ44(慣性センサ46及び48のそれぞれは同一である)のブロック図である。この実施形態において、慣性センサ44は従来型の加速度計を備えている。加速度計44はプルーフマス60(すなわち、高い精度で分かっている質量)を備えており、プルーフマス60は可撓性のクオーツヒンジ61を介して加速度計の本体にヒンジ接続されている。(通常は容電性位置測定装置である)位置測定装置62はマスのいずれかの側においてエンドストップに対するプルーフマス60の位置を測定する。励起供給装置64は位置測定装置62に動力を供給し、位置測定装置62の出力は、プルーフマス60をその平衡位置に保持するトルカコイル68を介して電流を流すために増幅器66によって増幅される。トルカコイル68からの出力電流は出力ピン70に到達する。この電流は、以下においてより詳細に説明される外部抵抗によって電圧に変換される。使用において、加速度計44がトルカコイル68に十分な電流を供給することによって、プルーフマス60を捕捉した状態を維持できる。しかし、ある実施形態においては、加速度計は低電圧の電力供給(例えば、±12V)によって稼動されており、通常は、供給可能な電流量には制限がある。加速度計の検出軸における振動が十分な大きさに達する場合、電流出力は飽和し、プルーフマスは捕捉状態に維持されない。他の従来型の慣性センサ、好ましくは閉ループフィードバックサーボ機構を備える慣性センサは、加速度計の代わりに使用可能である。ある実施形態において、サーボ機構のフィードバックの少なくとも一部は、減衰回路36などの外部回路による処理及び操作のために慣性センサの外部で利用可能である。別の実施形態においては、減衰回路36などの外部回路は、フィードバックループが外部からアクセス可能である又はアクセス不可能であるように、慣性センサと一体化することもできる。
【0056】
図10は、本発明の実施形態における減衰回路80のブロック図である。回路80は、加速度計44に接続されて示されている。抵抗R3は、加速度計44からの電力の大きさを制限することによって回路80を保護している。抵抗R1は加速度計から出力された電流を電圧に変換している。この実施形態において、加速度計の出力は3.0mA/G±5%であり、(振動が無い)1Gにおいて、±1.24VのDC電圧はR1を介して低下される。DC電圧は、掘削孔における加速度計44の検出軸の回転位置に応じて二つの値の間で変動する。低域フィルターはR1を介して接続されており、抵抗R2及びコンデンサC1の組み合わせによって形成されている。C1を介する電圧は、ユニティーゲイン構成に形成されたオペアンプOPに入力される。本明細書に開示されている発明の実施形態は市販されている好適な電子部品及びハードウェアを利用して実施可能であることが当業者に理解される。
【0057】
オペアンプOPから出力される電流は、抵抗R5によって制限されており、ゲインを有する電流フォロワとして機能する電流バッファー増幅器82に入力される。電流バッファー増幅器は、加速度計44からのバイポーラ電流を扱うために、相補的な一対のトランジスタを備える。正電流と負電流との間におけるオペアンプOPの最大切り替え周波数は、バッファー増幅器中のトランジスタがオン・オフを切り替えることができる最大周波数よりも低いことが好ましい。
【0058】
抵抗R5及び電流バッファー82はある高振動の状況において有用であるが、ある状況においてはそのような大きな振動に対する保護が必要ないため、これらの部品はオプションである。
【0059】
シャント抵抗R4は、抵抗R1、R2及びR3の分岐点とオペアンプOPのネガティブフィードバックとの間に接続されている。この回路における全ての能動部品、すなわち加速度計44、オペアンプOP及び電流バッファー増幅器82は、同一の電力供給機(例えば、バッテリーパック43)から電力を供給されている。
【0060】
使用において、加速度計44の検出軸に位置する指向性装置22の振動が無いと仮定すると、コンデンサC1は加速度計からの電流によって迅速に充電され、オペアンプOPの非反転入力における電圧は充電されたコンデンサを介するDC電圧になるであろう。ネガティブフィードバックを介して、オペアンプOPはほぼ正確に同一である非反転入力における電圧を維持するため、電流は回路内を流れない。
【0061】
ここで、指向性装置22が掘削による振動をうけると仮定すると、加速度計44からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし、コンデンサC1が電流を吐き出す又は吸い込むことによってコンデンサC1を通る電圧に対する変化に抵抗しようとし、周知であるように、コンデンサのリアクタンスは周波数と共に増加し、そのために高周波数の部品はより容易に地面へと短絡するため、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。低域フィルターの理論上の遮断周波数fcは100〜300Hzの範囲である。しかし、シャント抵抗R4の存在により、オペアンプOPはコンデンサC1の代わりに電流を供給及び吸収できるため、C1の静電容量を効果的に増加させ、低域フィルターの遮断周波数fcを小さくする。特に、数Hz以上の周波数において、R2及びR4を介する電圧の低下はほぼ同じであり、そのため、抵抗R2を通るよりも比較的大きな電流が抵抗R4を通る。抵抗R4を通る電流はR2/R4倍だけ大きい。この大きな電流は(その時点における加速度計からの出力電流の極性に応じて)オペアンプOPによって供給又は吸収され、オペアンプOPは反転入力における電圧を非反転入力における電圧と同じに維持しようとする。非反転入力における電圧のみが装置の向きの変化に応じて変わるため、オペアンプOPは、その出力における電圧をDCレベル付近に維持するが、高い周波数の電流を地面へ供給及び地面から吸収する。そのため、回路はC1の静電容量がR2/R4倍大きいようにする。これは、コンデンサC1を物理的に大きくする必要なく、遮断周波数fcを小さくする。
【0062】
対照的に、抵抗R1を介する電圧の遅い変化は、コンデンサC1に蓄えられたDC電圧に影響を与える。このようにして、オペアンプの非反転入力における電圧は、加速度計44の検出軸が重力ベクトルに対してどのように移動するかを示すための範囲にわたってゆっくりと変化する。
【0063】
ソリッドステートの電子機器を用いて小さなセラミックのコンデンサC1の容量効果を増幅することにより加速度計の出力において効果的に大きな減衰コンデンサを擬態することは、加速度計がプルーフマス捕捉を更に高い振動周波数に保持することを可能にし、ADCの捕捉範囲に減衰回路のDC出力を維持するAC経路をトルカ電流に付与する。さらに、能動回路設計は高い反復性を有しており、結果的に関連する熱補正及び熱ドリフトが容易にモデル化できると共に補正できるため、作動する温度範囲にわたってDC成分の正確性を維持できる。
【0064】
当該分野において、掘削者はX、Y及びZ軸のそれぞれの傾きを0.1°近くまで知りたいであろう。軸を中心とするそれぞれ0.1°の回転は、約±1mGのGの変化に相当する。ある実施形態においては、ADC38は±2Vの入力範囲と、12ビットの分解能を有しており、それは0Vから2Vの2048サンプルレベルに相当する。したがって、0から1Gの範囲において1mGを分解するためには、少なくとも1000のサンプルレベルが必要であり、それは、1GにおけるADCへの最小入力電圧0.97mV×1000=0.97V〜1Vに相当する。これよりも高い入力電圧は振動が原因であり、入力電圧のピークが2Vを超えると、ADC38は捕捉を失い、整流エラーが起こる(図2参照)。振動が非常に高いピークGであると、整流エラーが多分80°又は90°に匹敵する数十度以上のグラビディーツール測定におけるエラーを生じる可能性がある。これは、実際に補正が必要ない場合に補正をするために掘削の軌跡を調節しようとしてしまうため、掘削者にとって非常に問題である。より高い分解能のADC(例えば16ビット)を使用することにより、同じ1mGの精度をもたらすために入力電圧を低減可能であることが理解される。
【0065】
オペアンプOPから出力されるDC電圧はADC38へと入力される。回路80の周波数減衰性により、ADCが整流エラーの原因となる信号を捕捉し損なうことはほとんどない。これは、掘削中に掘削者がグラビティツールフェース測定に大きな信頼を抱くことができることを意味する。回路80から出力されるDC電圧の安定性の向上により、振動によるADCの切り取りが多分少なくてよいため、大きなDC電圧を出力するために精密な抵抗R1の値を上昇させることが可能である。これは、グラビティツールフェース測定の精度が向上されるため、非常に有益である。
【0066】
本発明の実施形態は従来型のADCを用いて実施することが可能である。使用において、ADCは設定時間にわたって順番に三つの減衰回路のそれぞれを(数百kHzにおいて)繰り返しサンプリングし、それぞれのチャネルのサンプルをデジタル処理回路40へと出力するようにプログラミングされている。この回路はそれぞれのチャネルのサンプルを相加的に平均化することによって、平均傾度を得ることができる。そして、三つの値は、それらが1Gを増大することをチェックするために、それらのベクトルの合計を決定するために用いられる。その後、グラビティツールフェース測定値は各軸の平均傾度と磁力計の測定値とを用いて決定される。そして、グラビティツールフェース測定値は、マッドパルス遠隔操作ユニット42とマッドパルサー18とを用いて地表へと伝達される。そして、掘削者に次のグラビティツールフェース測定値を提供するために、処理は設定時間後に繰り返される。
【0067】
図11及び12は、図2及び3に関して説明された実験と同様の実験の結果であり、その実験は回路80を備える指向性装置22において行われた。装置の振動は約40秒後に開始された。図11から明らかであるように、Gtot出力における整流補正エラーはほとんど又は全く無い。図12においても、指向性装置22のハイサイド測定値に誤差は無い。回路の出力電圧は、適切な平均化手法を用いて測定されており、非常に安定な16Gまでの振動と利用可能な20Gまでの振動として示されており、これは最大175℃で行われているが、適切な高温で利用可能な電子部品を選択することによってより高い温度でも可能である。そのような適切な平均化手法は、ADCにおいて可能なサンプリング頻度において(それぞれの磁力計の出力後に)順番にそれぞれの加速度計44,46,48の出力を読み取ること、メモリに結果を記録すること、一連の読み取りを繰り返すこと、及びそれぞれの加速度計の出力値の相加平均を得ることを含む。そして、これらの平均値はGtotの測定値をもたらすために組み合わせられたベクトルである。
【0068】
減衰回路の機能性は、例えばガンマ線測量装置などの他の掘削孔用装置に利用可能である。この測定もグラビティツールフェースに基づいているため、改良されたグラビティツールフェース測定は、ガンマ線測定装置のクリスタルの特定のビニングウィンドウが中央に位置することをより確実に掘削者が知るようにできる。
【0069】
本発明の実施形態の減衰回路の機能性は、回路の減衰効果を変更可能にすることによって、更に改良可能である。そのような変更可能性はマイクロプロセッサの制御によって提供可能であるため、もたらされる減衰は使用中に掘削孔において調節可能である。そのような変更可能性は一つの装置の機能性を非常に向上させ、慣性センサの出力信号において異なる減衰効果が必要な機能、例えば非常に低い遮断周波数を必要とする(例えば、グラビティツールフェース測定の傾度の測定が±0.1°の精度を通常は必要とする)機能、及びより高い遮断周波数を必要とする(例えば、掘削及び/又はドリルストリングのスティック/スリップ中におけるRPMの測定)機能を実行可能にする。減衰効果の調節によって、回路は必要とされる特定の機能に適合可能である。変更可能な減衰効果の二つの例示的な実施形態を以下において説明する。
【0070】
図13を参照すると、減衰回路の別の実施形態は参照番号90によって全体が特定される。回路90は、全体的に回路80と似ており、同様の部品を示す同様の番号を有している。回路90は、実効抵抗R2を変更可能にする可変回路素子を備えている。この実施形態における追加の可変回路素子は、マイクロプロセッサの制御下において減衰周波数の細かな又は荒い調節を可能にするデジタルポテンショメータ92(市販されている好適なデジタルポテンショメータが使用可能である)を備えている。特に、デジタルポテンショメータ92は抵抗R2を介する電圧の低下、ひいてはそこを流れる電流を制御している。電流が増加すると、R2/R4の比率が低下し、C1の実効静電容量が低下する。このようにして、回路の遮断周波数は大きくなる。反対に、R2を介する電流がポテンショメータ92を用いることで低減すると、R2/R4の比率が増大し、C1の実効静電容量が増加する。このようにして、回路の遮断周波数は小さくなる。(例えばデジタル処理回路40における)マイクロプロセッサは図2及び3並びに図5及び6に示されるものと同様の整流補正効果のための出力信号をモニタリングできる。検出されると、マイクロプロセッサは補正を低減又はほぼ除去するためにポテンショメータ92を調節する。
【0071】
図14を参照すると、減衰回路の別の実施形態は参照番号100によって全体が特定される。回路100は全体的に回路80と似ており、同様の部位を示す同様の番号を有している。回路100は、抵抗R2と平行な抵抗R6への切り替え接続を提供するアナログスイッチ102(市販の好適なアナログスイッチが使用可能である)を備えている。スイッチ102の制御はマイクロプロセッサ(図示しない)のポートピンを介して行われる。抵抗R6において切り替えることによって、R2の実効抵抗は低下し、R2/R4の比率が低下するため、C1の実効静電容量が低下する。このようにして、減衰回路の遮断周波数は大きくなる。回路から抵抗を切り替えることによって、遮断周波数を小さくできる。図2と同様に、抵抗R6はデジタル処理回路40における出力に応じて回路から及び回路へと切り替えることができる。本発明の実施形態は、掘削による振動を受ける指向性装置によって、掘削孔内におけるグラビティツールフェース、傾き、アジマス、位置及び回転のパラメータの組み合わせである測定を改善することができる。
【0072】
本発明の一つ以上の実施形態から利益を得る地中での掘削中測定(MWD)の範囲及び軌跡制御の応用は、限定はしないが、1.磁気により(開坑において)位置決め及び測量する操縦システム、2.能動的に「迅速に」位置決め及び測量する操縦システム、3.方向及び位置のジャイロにより位置決め及び測量する操縦システム、4.わずかな傾きに近い位置決め及び測量(地理的操縦)の利用、5.空気掘削及びコイルチュービングのアンダーバランス掘削の位置決め及び測量の利用、6.動的なMWDの傾きの回転掘削及び測量、7.回転操縦可能なロールが安定化されたプラットフォーム及び能動的グラビティツールフェース制御のいずれかを含む。
【0073】
本発明の減衰回路の実施形態は、限定されないが、オイル、ガス、及び水の井戸の掘削及び測量、地熱、トレンチレス、及び渡河HDD用途(例えばパイプ、ケーブルなど)を含む掘削作業に利用される全ての態様の掘削孔用装置に有用である。また、本発明はほぼ垂直な掘削孔の掘削作業に利用可能である。
【0074】
本明細書において開示される減衰回路の実施形態は、装置のプリセッションによるトルクの測定がトルカコイルの電流によって「ゼロ」にされるジャイロスコープなどのサーボ「プルーフマス」又は「スピニングマス」原理を利用するストラップダウン回転センサ又は回転プラットフォームを有する掘削孔用回転センサの閉ループサーボ設計に利用可能である。
【0075】
本明細書に開示される技術は、本明細書に説明される処理を行うアルゴリズムを有するように構成されたソフトウェアにより完全に自動化/自立化可能であることが当業者に理解される。実施形態は、適切なハードウェアを備える一つ以上の汎用コンピュータをプログラミングすることによって実施可能である。プロセッサにより読み取り可能であり、本明細書において説明される作業を行うためにコンピュータによって実行可能な指示の一つ以上のプログラムをエンコードする一つ以上のプログラム記憶装置を利用することによって、プログラミングは実施される。プログラム記憶装置は、例えば一つ以上のフロッピー(登録商標)ディスク、CD−ROM、又は他の光学ディスク、磁気テープ、リードオンリーメモリーチップ(ROM)、及び周知又は今後開発される他の形態をとり得る。指示のプログラムは、「オブジェクトコード」、すなわち、コンピュータによってほぼ直接実行可能な二進法形態、実行前に編集又は解釈が必要な「ソースコード」、又は部分的に編集されたコードなどの中間形態である。プログラム記憶装置及び指示のエンコードの正確な形態はここでは重要ではない。また、発明の実施形態は、(装置に備えられた適切なハードウェア/ソフトウェアにより)掘削孔内、地表、及び/又はその組み合わせにおいて説明された機能を実行するよう形成されている。
【0076】
本開示は本発明の特定の実施形態を説明しているが、本明細書において説明されている部材の同等の機能及び/又は構造的な代替の利用を含む多数の改良及び変形が、本開示を検討した後に当業者に明らかになるであろう。例えば、本発明の実施形態は従来の遠隔測定システム(例えば、マッドパルス、光ファイバー、ワイヤーシステム、有線ドリルパイプなど)と組み合わせた作業のために実装できる。開示された技術は特定の種類の伝送手段又は地下での作業に限定されない。例えば、本発明の実施形態は、LWD/MWD、移動掘削、海底作業などの作業に非常に適している。当業者にとって明らかなそのような全ての同様の変形は、添付の請求項によって規定される発明の範囲内であることが意図されている。
【特許請求の範囲】
【請求項1】
掘削孔における作業に使用される装置であって、
掘削孔における作業中に慣性データ信号を提供するよう形成された少なくとも一つの慣性センサと、ここで、前記慣性データ信号は不要な振動の影響を受け、
前記慣性データ信号に前記不要な振動の影響に対する減衰効果を与えるように形成された電子回路と
を有し、前記電子回路は、静電容量効果を増大することによって前記慣性データ信号における前記不要な振動の影響を補正するよう形成されていることを特徴とする装置。
【請求項2】
前記電子回路は能動的に地面へ電流を吐き出す又は地面から電流を吸い込むように形成されていることを特徴とする請求項1に記載の装置。
【請求項3】
前記電子回路は可変減衰効果を提供するように形成されていることを特徴とする請求項2に記載の装置。
【請求項4】
前記電子回路は、装置が掘削孔内に配置されると減衰効果を提供するように形成されていることを特徴とする請求項3に記載の装置。
【請求項5】
前記電子回路は、前記慣性センサの振動にかかわらず捕捉範囲内の出力DC電圧を維持するように形成されていることを特徴とする請求項4に記載の装置。
【請求項6】
掘削孔における作業中に慣性データ信号を提供するようそれぞれ形成された相互に垂直な三つの慣性センサを備えていることを特徴とする請求項5に記載の装置。
【請求項7】
それぞれのセンサは、慣性データ信号の不要な振動の影響に対する減衰効果を提供するよう形成された電子回路に接続されていることを特徴とする請求項6に記載の装置。
【請求項8】
それぞれの電子回路は、能動的に地面に電流を吐き出す又は地面から電流を吸い込むことによって前記回路の静電容量効果を増大するように形成されていることを特徴とする請求項7に記載の装置。
【請求項9】
それぞれの電子回路は、可変減衰効果を提供するように形成されていることを特徴とする請求項8に記載の装置。
【請求項10】
それぞれの電子回路は、装置が掘削孔内に配置されると減衰効果を提供するように形成されていることを特徴とする請求項9に記載の装置。
【請求項11】
それぞれの電子回路は、慣性センサの振動にかかわらず捕捉範囲内に出力DC電圧を維持するように形成されていることを特徴とする請求項10に記載の装置。
【請求項12】
掘削孔用装置の運転方法であって、
前記掘削孔用装置に搭載されている少なくとも一つの慣性センサを用いて掘削孔における作業中に慣性データ信号を取得する段階と、ここで、前記慣性データ信号は不要な振動による影響を受け、
前記掘削孔用装置に搭載されている電子回路を用いて慣性データ信号における不要な振動の影響に対する減衰効果を提供する段階と、
を有し、前記電子回路は静電容量効果を増大することによって前記慣性データ信号における不要な振動の影響を補正するように形成されていることを特徴とする方法。
【請求項13】
能動的に地面に電流を吐き出す又は地面から電流を吸い込むことによって前記電子回路の静電容量効果を増大するように前記電子回路を形成する段階を更に有することを特徴とする請求項12に記載の方法。
【請求項14】
可変減衰効果を提供するように前記電子回路を形成する段階を更に有することを特徴とする請求項13に記載の方法。
【請求項15】
前記掘削孔用装置が掘削孔内に配置されると減衰効果を提供するように前記電子回路を形成する段階を更に有することを特徴とする請求項14に記載の方法。
【請求項16】
前記慣性センサの振動にかかわらず捕捉範囲内に出力DC電圧を維持するように前記電子回路を形成する段階を更に有することを特徴とする請求項15に記載の方法。
【請求項17】
前記掘削孔用装置が相互に垂直な三つの慣性センサを有しており、それぞれのセンサが掘削孔における作業中に慣性データ信号を提供するように形成されていることを特徴とする請求項12に記載の方法。
【請求項18】
それぞれの慣性センサが、前記慣性データ信号における不要な振動の影響に対して減衰効果を提供するように形成された電子回路に接続されていることを特徴とする請求項17に記載の方法。
【請求項19】
能動的に地面に電流を吐き出す又は地面から電気を吸い込むことによって前記電子回路の静電容量効果を増大するようにそれぞれの電子回路を形成する段階を更に有することを特徴とする請求項18に記載の方法。
【請求項20】
それぞれの電子回路が可変減衰効果を提供するように形成されていることを特徴とする請求項19に記載の方法。
【請求項21】
それぞれの電子回路が、前記掘削孔用装置が掘削孔内に配置されると減衰効果を提供するように形成されていることを特徴とする請求項20に記載の方法。
【請求項22】
それぞれの電子回路が、前記慣性センサの振動にかかわらず捕捉範囲内に出力DC電圧を維持するように形成されていることを特徴とする請求項21に記載の方法。
【請求項1】
掘削孔における作業に使用される装置であって、
掘削孔における作業中に慣性データ信号を提供するよう形成された少なくとも一つの慣性センサと、ここで、前記慣性データ信号は不要な振動の影響を受け、
前記慣性データ信号に前記不要な振動の影響に対する減衰効果を与えるように形成された電子回路と
を有し、前記電子回路は、静電容量効果を増大することによって前記慣性データ信号における前記不要な振動の影響を補正するよう形成されていることを特徴とする装置。
【請求項2】
前記電子回路は能動的に地面へ電流を吐き出す又は地面から電流を吸い込むように形成されていることを特徴とする請求項1に記載の装置。
【請求項3】
前記電子回路は可変減衰効果を提供するように形成されていることを特徴とする請求項2に記載の装置。
【請求項4】
前記電子回路は、装置が掘削孔内に配置されると減衰効果を提供するように形成されていることを特徴とする請求項3に記載の装置。
【請求項5】
前記電子回路は、前記慣性センサの振動にかかわらず捕捉範囲内の出力DC電圧を維持するように形成されていることを特徴とする請求項4に記載の装置。
【請求項6】
掘削孔における作業中に慣性データ信号を提供するようそれぞれ形成された相互に垂直な三つの慣性センサを備えていることを特徴とする請求項5に記載の装置。
【請求項7】
それぞれのセンサは、慣性データ信号の不要な振動の影響に対する減衰効果を提供するよう形成された電子回路に接続されていることを特徴とする請求項6に記載の装置。
【請求項8】
それぞれの電子回路は、能動的に地面に電流を吐き出す又は地面から電流を吸い込むことによって前記回路の静電容量効果を増大するように形成されていることを特徴とする請求項7に記載の装置。
【請求項9】
それぞれの電子回路は、可変減衰効果を提供するように形成されていることを特徴とする請求項8に記載の装置。
【請求項10】
それぞれの電子回路は、装置が掘削孔内に配置されると減衰効果を提供するように形成されていることを特徴とする請求項9に記載の装置。
【請求項11】
それぞれの電子回路は、慣性センサの振動にかかわらず捕捉範囲内に出力DC電圧を維持するように形成されていることを特徴とする請求項10に記載の装置。
【請求項12】
掘削孔用装置の運転方法であって、
前記掘削孔用装置に搭載されている少なくとも一つの慣性センサを用いて掘削孔における作業中に慣性データ信号を取得する段階と、ここで、前記慣性データ信号は不要な振動による影響を受け、
前記掘削孔用装置に搭載されている電子回路を用いて慣性データ信号における不要な振動の影響に対する減衰効果を提供する段階と、
を有し、前記電子回路は静電容量効果を増大することによって前記慣性データ信号における不要な振動の影響を補正するように形成されていることを特徴とする方法。
【請求項13】
能動的に地面に電流を吐き出す又は地面から電流を吸い込むことによって前記電子回路の静電容量効果を増大するように前記電子回路を形成する段階を更に有することを特徴とする請求項12に記載の方法。
【請求項14】
可変減衰効果を提供するように前記電子回路を形成する段階を更に有することを特徴とする請求項13に記載の方法。
【請求項15】
前記掘削孔用装置が掘削孔内に配置されると減衰効果を提供するように前記電子回路を形成する段階を更に有することを特徴とする請求項14に記載の方法。
【請求項16】
前記慣性センサの振動にかかわらず捕捉範囲内に出力DC電圧を維持するように前記電子回路を形成する段階を更に有することを特徴とする請求項15に記載の方法。
【請求項17】
前記掘削孔用装置が相互に垂直な三つの慣性センサを有しており、それぞれのセンサが掘削孔における作業中に慣性データ信号を提供するように形成されていることを特徴とする請求項12に記載の方法。
【請求項18】
それぞれの慣性センサが、前記慣性データ信号における不要な振動の影響に対して減衰効果を提供するように形成された電子回路に接続されていることを特徴とする請求項17に記載の方法。
【請求項19】
能動的に地面に電流を吐き出す又は地面から電気を吸い込むことによって前記電子回路の静電容量効果を増大するようにそれぞれの電子回路を形成する段階を更に有することを特徴とする請求項18に記載の方法。
【請求項20】
それぞれの電子回路が可変減衰効果を提供するように形成されていることを特徴とする請求項19に記載の方法。
【請求項21】
それぞれの電子回路が、前記掘削孔用装置が掘削孔内に配置されると減衰効果を提供するように形成されていることを特徴とする請求項20に記載の方法。
【請求項22】
それぞれの電子回路が、前記慣性センサの振動にかかわらず捕捉範囲内に出力DC電圧を維持するように形成されていることを特徴とする請求項21に記載の方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−190676(P2011−190676A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−49886(P2011−49886)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(509282169)ナショナル オイルウェル ヴァーコ,エル.ピー. (1)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2011−49886(P2011−49886)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(509282169)ナショナル オイルウェル ヴァーコ,エル.ピー. (1)
【Fターム(参考)】
[ Back to top ]