
掘削機
【課題】掘削フレームの引抜作業時において、地上での土砂の飛散を確実に防止することができる掘削機を提供すること。
【解決手段】掘削体6に設けられ、掘削チェーン17を掘削フレーム19〜21の軸線回りに取り囲むカバー体8を備え、このカバー体8は、掘削体6に固定された基部カバー24と、この基部カバー24の外側の領域を通って当該基部カバー24に対し前記軸線に相対変位自在に装着された延長カバー25、26とを有し、延長カバー25、26は、掘削体6がベースマシン2に対し最も上昇した状態において地表から露出する掘削チェーン17を前記軸線回りに取り囲む延長姿勢と、掘削体6がベースマシン2に対し最も下降した状態において地表から露出する掘削チェーン17を前記軸線回りに取り囲む短縮姿勢との間で伸縮自在に構成されている。
【解決手段】掘削体6に設けられ、掘削チェーン17を掘削フレーム19〜21の軸線回りに取り囲むカバー体8を備え、このカバー体8は、掘削体6に固定された基部カバー24と、この基部カバー24の外側の領域を通って当該基部カバー24に対し前記軸線に相対変位自在に装着された延長カバー25、26とを有し、延長カバー25、26は、掘削体6がベースマシン2に対し最も上昇した状態において地表から露出する掘削チェーン17を前記軸線回りに取り囲む延長姿勢と、掘削体6がベースマシン2に対し最も下降した状態において地表から露出する掘削チェーン17を前記軸線回りに取り囲む短縮姿勢との間で伸縮自在に構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地中に止水用、基礎用等の地中連続壁を造成するための連続溝を掘削する掘削機に関するものである。
【背景技術】
【0002】
従来から、掘削機として、ベースマシンに昇降自在に装着された掘削体を有し、この掘削体を昇降させることにより地中の土砂を掘削するものが知られている。
【0003】
この種の掘削機では、掘削体を引き上げる際に、当該掘削体に付着した土砂等が周囲に飛散するおそれがあった。
【0004】
このような土砂の飛散を防止する技術として、バケット式の掘削機において掘削バケットの周囲を取り囲む掘削バケット用シート装置が知られている(例えば、特許文献1)。
【0005】
前記シート装置は、掘削バケットが地中に挿入された際に地上に残されて折り畳み状態に変位するとともに、掘削バケットを地上へ引き上げた際に自重で伸張状態となって掘削バケットを覆うように形成された蛇腹状のシートにより構成されている。
【特許文献1】実開平6−4190号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、前記掘削機としては、上下方向に延びる掘削フレームと、この掘削フレームの上下に配された回転体の間に掛け渡された掘削刃を有する無端状体と、この無端状体を循環駆動させる駆動部とを有する掘削体を備えたものが知られている。
【0007】
この種の掘削機は、前記無端状体を循環駆動させながら掘削体を下降させて、掘削刃にて地面を掘削するように構成されているため、前記特許文献1のシート装置を採用するのに適していない。
【0008】
すなわち、前記のように掘削刃を有する掘削機に対し前記特許文献1のシート装置を用いるためには当該シート装置に優れた柔軟性及び高い強度が要求される。これは、前記特許文献1の掘削機ではバケット開放時にバケット内に収納された静止状態にある土砂が飛散するため土砂等の運動エネルギーが比較的小さいのに対し、掘削刃を有する掘削機においては、掘削刃に付着していた土砂等が掘削刃の回転に伴って飛散するため土砂等の運動エネルギーが大きく、この運動エネルギーを吸収するための柔軟性及び強度がシート装置に要求されるためである。そして、これら双方の要求を満足したシート装置を形成するためには、シート素材として特殊な素材を用いる必要があることから高価なものとなりコスト面から採用することが困難だった。
【0009】
特に、前記のように上下方向に延びる掘削フレームを有する掘削機に特許文献1のシート装置を採用する場合には、その長さに対応してシート装置が長大なものとなるため、掘削フレームを地中に挿入する際にシート装置の折り畳みをスムーズに行なうためにより大きな柔軟性が必要となる。
【0010】
本発明は、上記課題に鑑みてなされたものであり、掘削フレームの引抜作業時において、地上での土砂の飛散を確実に防止することができる掘削機を提供することを目的としている。
【課題を解決するための手段】
【0011】
上記課題を解決するために、本発明は、上下方向に延びる掘削フレームとこの掘削フレームの上下に配された回転体の間に掛け渡された掘削刃を有する無端状体とこの無端状体を循環駆動させる駆動部とを有するとともにベースマシンに対して少なくとも昇降自在に装着された掘削体を備え、前記掘削体を下降させて掘削フレームを地中に挿入するとともに前記無端状体を前記駆動部によって循環駆動させることにより地中の土砂を掘削する掘削機であって、前記掘削体に設けられ、前記無端状体を掘削フレームの軸線回りに取り囲むカバー体をさらに備え、このカバー体は、前記掘削体に固定された基部カバーと、この基部カバーの内側又は外側の領域を通って当該基部カバーに対し前記軸線方向に相対変位自在に装着された延長カバーとを有し、前記カバー体は、前記基部カバーに対する前記延長カバーの相対移動により、前記掘削体がベースマシンに対し最も上昇した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む延長姿勢と、前記掘削体がベースマシンに対し最も下降した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む短縮姿勢とに切換可能となるように伸縮することを特徴とする掘削機を提供する。
【0012】
本発明によれば、掘削体に設けられたカバー体が、延長姿勢と短縮姿勢との間で伸縮自在に構成されているので、掘削体の昇降位置にかかわらず地表に露出する無端状体を掘削フレームの軸線回りに取り囲んで土砂が飛散するのを確実に防止することができる。
【0013】
そして、前記掘削体は、基部カバーとこの基部カバーの内側又は外側の領域を通って当該基部カバーに対し相対変位自在な延長カバーとを有するテレスコープ型に形成されているので、優れた柔軟性及び高い強度の双方を満足するシート材が要求される従来の技術と異なり、前記両カバーに金属材料等、強度の高い材質を有する材料を用いながら当該両カバーの相対変位によってカバー体を確実に伸縮させることができる。
【0014】
前記カバー体は、その自重で伸縮させるようにしてもよいが、前記掘削体を前記ベースマシンに対し昇降させる昇降駆動部と、前記カバー体を前記延長姿勢と短縮姿勢との間で伸縮させる伸縮駆動部とをさらに備えていることが好ましい。
【0015】
この構成によれば、無端状体のメンテナンスを行う際等に、伸縮駆動部を作動させることにより、地表から露出する部分について、無端状体をカバー体から開放することができる。
【0016】
さらに、前記昇降駆動部による掘削体の昇降位置を検出する検出手段と、この検出手段により検出された前記昇降位置に基づいて、前記カバー体が、地表から露出した前記無端状体を取り囲むことができる長さとなるように前記伸縮駆動部の駆動を制御する制御手段とを備えていることが特に好ましい。
【0017】
この構成によれば、昇降駆動部による掘削体の昇降動作に同期してカバー体を伸縮させることにより、当該掘削体の昇降位置に応じて、地表に露出した無端状体を取り囲むことができるようにカバー体の長さを自動的に調整することができる。
【0018】
前記掘削機において、前記掘削体には、前記カバー体によって取り囲まれた範囲内で前記無端状体の掘削刃に臨むように掻き取り部材が固定されていることが好ましい。
【0019】
この構成によれば、掘削体に固定された掻き取り部材と、循環駆動する掘削刃とが相対的に移動する過程で、前記掻き取り部材によって掘削刃に付着した土砂等の異物を除去することができるので、掘削作業と掘削刃の清掃作業とを並行して行うことができ、掘削刃を清掃する手間を軽減することができる。
【0020】
特に、上記構成では、カバー体によって取り囲まれた範囲内に掻き取り部材が設けられているので、当該掻き取り部材によって掻き取られた土砂等の異物が周囲に飛散するのをカバー体8によって防止しながら、掘削刃を清掃することができる。
【0021】
前記伸縮駆動部の具体的態様としては、前記基部カバーの上端に取り付けられたウィンチと、このウィンチを回転駆動するモータと、前記ウィンチの回転駆動により巻上げ又は巻下げられるロープとを備え、前記ロープの巻き上げ又は巻下げ動作に応じて前記延長カバーを基部カバーに対し昇降させることにより前記カバー体を伸縮させる構成とすることができる。
【0022】
この構成によれば、カバー体を伸縮させるウィンチモータを、前記基部カバーの上端に取り付けているので、無端状体の循環駆動によってカバー体の内側で多数の土砂等が飛散している場合であっても、当該土砂等がウィンチモータに与える影響を低減することができる。
【0023】
また、前記カバー体は、複数の延長カバーを有しており、各延長カバーは、これに隣接する延長カバーに対して相対移動可能に設けられていることが好ましい。
【0024】
この構成によれば、複数の延長カバーを備えているので、本体カバーの伸縮範囲をより長くすることができ、逆に、伸縮範囲を一定にした場合には、基部カバーや延長カバー1個当たりの長さを短くしてコンパクト化を図ることができる。
【0025】
さらに、前記カバー体の下端部には、当該カバー体に進入する前記無端状体の掘削刃に対し予め設定された大きさ以上の異物が付着しているか否かを検出する異物検出手段が設けられているとともに、この異物検出手段により前記大きさ以上の異物が検出された場合に、前記無端状体の循環駆動を停止させるように前記駆動部を制御する制御手段を備えていることが特に好ましい。
【0026】
この構成によれば、カバー体に進入する掘削刃に大きな異物が付着している場合に、無端状体の駆動を停止させることができるので、予め設定された大きさ以上の異物がカバー体の深部(上部)へ進入するのを未然に防止することにより、当該カバー体の内側に配設される構成部品(例えば、無端状体を駆動するモータ等)の破損を抑制することができる。
【0027】
具体的に、前記異物検出手段は、その上端部が前記カバー体の下端部に水平軸回りに揺動自在に支持された検出板と、この検出板をカバー体の内側へ揺動する方向へ付勢する付勢手段と、前記検出板の下端部が前記予め設定された大きさに対応する距離だけ前記掘削刃から離間した位置となるように当該検出板のカバー体の内側への揺動を規制する規制手段と、前記検出板がカバー体の外側に揺動したか否かを検出する揺動位置検出手段とを備え、前記検出板の下端部には、上方へ向かうに従いカバー体の内側へ傾斜する内側面が形成され、この内側面とカバー体の内側へ進入する掘削刃に付着した前記予め設定された大きさ以上の異物とが摺接することにより、前記検出板がカバー体の外側に揺動する構成とすることができる。
【0028】
この構成によれば、カバー体の内側へ進入する掘削刃に前記予め設定された大きさ以上の異物が付着している場合に、当該異物と検出板の内側面とが摺接することにより当該検出板がカバー体の外側へ揺動し、この揺動を揺動位置検出手段によって検出することにより、大きな異物が付着していることを検知して無端状体を停止させることができる。
【0029】
前記掘削機において、前記規制手段により規制された姿勢で前記検出板がカバー体の外側へ揺動するのを規制する第二規制手段をさらに備え、この第二規制手段は、検出板の揺動を規制する規制状態と当該揺動を許容する許容状態とに遷移自在に構成されていることが好ましい。
【0030】
この構成によれば、検出板をカバー体の内側へ揺動した姿勢で保持することにより検出板と無端状体との間の隙間を小さくした状態を維持することができるので、掘削刃に前記予め設定された大きさよりも小さな異物がカバー体の内側へ進入しこの異物がカバー体の内側で離脱した場合に、当該異物がカバー体の外側へ落下するための範囲をカバー体と掘削刃との狭い隙間に限定して、当該異物の飛散範囲をより小さくすることができる。
【0031】
一方、前記第二規制手段は、カバー体の外側への検出板の揺動を許容する状態にも遷移自在とされているので、この許容状態とした場合には、上述した異物検出手段と制御手段とによってカバー体の深部へ大きな異物が進入するのを防止することができる。
【発明の効果】
【0032】
本発明によれば、掘削フレームの引抜作業時において、地上での土砂の飛散を確実に防止することができる。
【発明を実施するための最良の形態】
【0033】
以下、本発明の好ましい実施形態について図面を参照して説明する。
【0034】
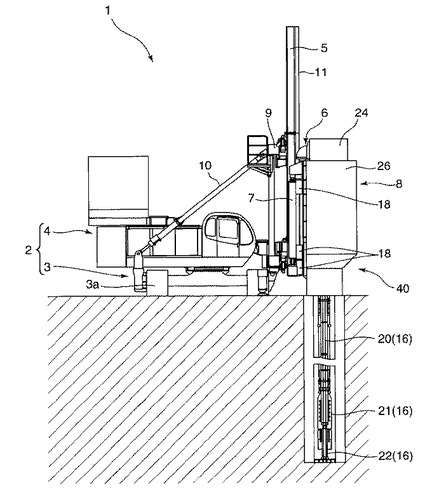
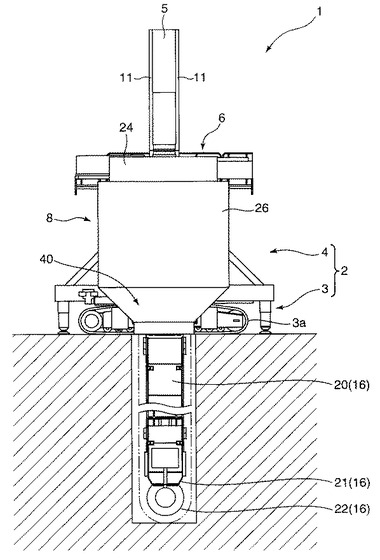
図1は、本発明の実施形態に係る掘削機を示す側面図である。図2は、図1の掘削機の正面図である。
【0035】
図1及び図2を参照して、掘削機1は、ベースマシン2を備えている。このベースマシン2は、クローラ3aが設けられた下部走行体3と、この下部走行体3上に旋回可能に配置された上部旋回体4とを備えている。
【0036】
上部旋回体4は、その前部に立設されたリーダ5と、このリーダ5に対し昇降自在に取り付けられた掘削体6と、この掘削体6を昇降させる昇降シリンダ(昇降駆動部)7と、前記掘削体6に装着されたカバー体8とを備えている。
【0037】
リーダ5は、上下に延びる筒状をなし、その上部に設けられたブラケット9がステー10を介して上部旋回体4の所定部位に連結されている。このリーダ5には、上下に延びる左右一対のレール11が固定され、これらレール11に沿って前記掘削体6がスライド自在に装着されている。
【0038】
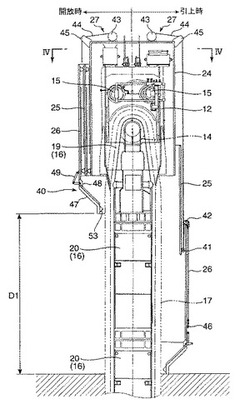
図3は、図1の掘削体6の一部を省略して示す正面断面図である。図4は、図3のIV−IV線断面図である。
【0039】
図1〜図4を参照して、掘削体6は、ベース12と、このベース12に設けられたスプロケット14及びこれを回転駆動するモータ(駆動部)15と、前記ベース12から下方に延びるカッター本体16と、このカッター本体16と前記スプロケット14との間に掛け渡される掘削チェーン(無端状体)17とを備え、前記ベース12及びカッター本体16がスライダ18を介して前記レール11に装着されている。
【0040】
カッター本体16は、前記ベース12の下端部に連結された上側掘削フレーム19と、この上側掘削フレーム19の下端部に着脱自在に連結された中間掘削フレーム20と、この中間掘削フレーム20の下端部に着脱自在に連結された下側掘削フレーム21と、この下側掘削フレーム21の下端部に装着されたアイドラ22(図1及び図2参照)とを備えている。
【0041】
そして、このアイドラ22と前記スプロケット14との間に、表面に前後に並ぶ複数のカッタービット23(掘削刃:図4参照)をもつ無端状の掘削チェーン17が掛け渡されることにより、前記スプロケット14、モータ15及びカッター本体16によってチェーン式カッターが構成されている。
【0042】
なお、本実施形態では、上側掘削フレーム19と下側掘削フレーム21との間に、複数の中間掘削フレーム20及び掘削チェーン17を継ぎ足すことにより、カッター本体16を上下方向に延長することが可能とされている。
【0043】
前記昇降シリンダ7は、前記レール11が形成された範囲内、すなわち、予め設定された昇降範囲(例えば、5m)で、掘削体6を昇降するようになっている。
【0044】
また、昇降シリンダ7には、そのロッドの伸縮位置を検出するロッド検出センサ58(図8参照)が設けられている。このロッド検出センサ58は、例えば、ロッドの伸縮動作に従動するケーブルと、このケーブルを巻き取る方向に付勢されたケーブルリールと、このケーブルリールの回転位置を検出するロータリーエンコーダとを備えた構成とすることができる。
【0045】
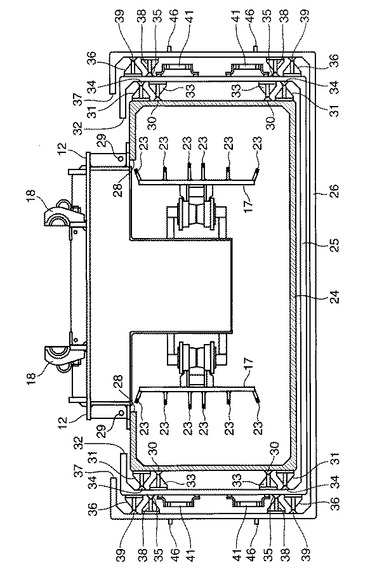
カバー体8は、前記掘削体6に固定された基部カバー24と、この基部カバー24の外側に嵌め込まれた第一延長カバー25と、この第一延長カバー25の外側に嵌め込まれた第二延長カバー26と、この第二延長カバー26の下端部に取り付けられた異物検出手段40と、これら各延長カバー24、25を基部カバー24に対し伸縮させる伸縮駆動手段(伸縮駆動部)27とを備え、各カバー24〜26により前記掘削チェーン17を前記掘削フレーム19〜21の軸線(上下軸)回りに取り囲むように構成されている。
【0046】
基部カバー24は、長手方向を左右に向けた断面略長方形で、かつ、下方へ開く有底容器状に形成されている。また、基部カバー24の後部壁面には、当該壁面を貫く切り欠き部28が形成され、この切り欠き部28の縁部が前記ベース12に対しブラケット29を介して固定されている。
【0047】
また、基部カバー24の左右の外側面には、上下方向に延びるレール30と、ガイドローラ31とが設けられている。
【0048】
第一延長カバー25及び第二延長カバー26は、それぞれ長手方向を左右方向に向けた断面略長方形に形成されているとともに、前記ベース12との干渉を避けるようにその後部壁面を貫通する切り欠き部32及び切り欠き部37がそれぞれ形成された部材である。
【0049】
第一延長カバー25の左右の内側面には、前記レール30に転がり接触するガイドローラ33と、上下に延びて前記ガイドローラ31を転がり接触自在に支持するレール34とが設けられている。一方、第一延長カバー25の左右の外側面には、上下に延びるレール35と、ガイドローラ36とが設けられている。
【0050】
第二延長カバー26の左右の内側面には、前記レール35に転がり接触するガイドローラ38と、上下に延びて前記ガイドローラ36を転がり接触自在に支持するレール39とが設けられている。
【0051】
そして、前記第一延長カバー25の左右の外側面には、後述するロープ44が掛けられるシーブ41が設けられている一方、第二延長カバー26の左右上端部には、ロープ44が掛けられるシーブ42(図3参照)が設けられている。
【0052】
伸縮駆動手段27は、図3に示すように、前記基部カバー24の上面(上端)に固着された左右一対のウィンチ43と、これらウィンチ43にそれぞれ巻回された一対のロープ44と、前記ウィンチ43を回転駆動するウィンチモータ59(図8参照)とを備え、このウィンチモータ59の駆動によって各ウィンチ43を回転させることにより、各ロープ44をそれぞれ巻上げ又は巻下げすることが可能とされている。
【0053】
前記ロープ44は、基部カバー24に設けられたシーブ45を介して前記第一延長カバー25のシーブ41に掛け渡されて上方に向かい、前記第二延長カバー26のシーブ42に掛け渡されて、その下端部が取付部材46によって第二延長カバー26の外側面に固定されている。
【0054】
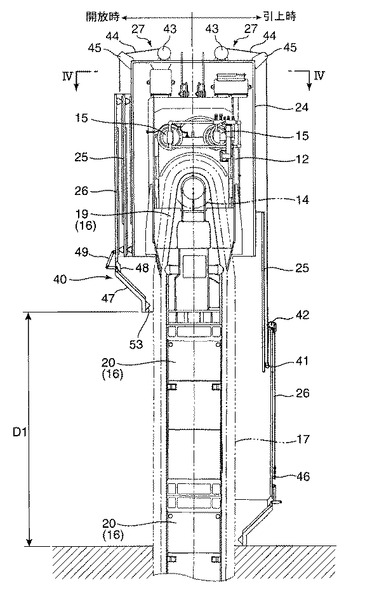
したがって、各ウィンチ43によりロープ44を巻き上げることにより、カバー体8を図3の左側に示す短縮姿勢として掘削チェーン17を開放することができる一方、各ウィンチ43によりロープ44を巻下げることにより、カバー体8を図3の右側に示す延長姿勢として掘削チェーン17を掘削フレーム19〜21の軸線(上下軸)回りに取り囲むことができる。
【0055】
そして、前記短縮姿勢から延長姿勢までのストロークD1が、前記昇降シリンダ7の昇降範囲と略同一とされている。
【0056】
図5は、図3の異物検出手段40を拡大して示す正面断面図である。
【0057】
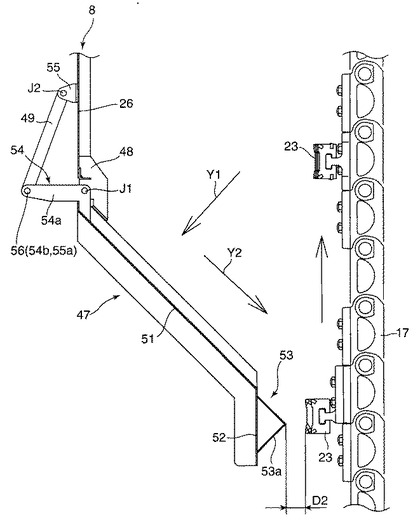
図3及び図5を参照して、異物検出手段40は、前記第二延長カバー26に対しそれぞれ水平軸J1回りに揺動自在に取り付けられた3枚の検出板47を備えている。すなわち、各検出板47は、第二延長カバー26の左右側壁に対してそれぞれ前後方向に延びる水平軸J1回りに、前壁に対して左右方向に延びる水平軸J1(図示せず)回りに揺動自在とされている。以下、右側に設けられた検出板47及びその周囲の構成のみについて説明する。
【0058】
異物検出手段40は、前記検出板47と、この検出板47を第二延長カバー26の内側へ揺動する方向へ付勢する図略の巻ばね(付勢手段)と、前記検出板47の第二延長カバー26の内側への揺動を規制する規制ブロック(規制手段)48と、検出板47の第二延長カバー26の外側への揺動を規制する規制レバー49と、検出板47が第二延長カバー26の外側に揺動したか否かを検出するリミットスイッチ(揺動位置検出手段)50(図7参照)とを備えている。
【0059】
検出板47は、図略の付勢手段によって、その下端部が掘削チェーン17側へ向くように前記水平軸J1回りに付勢された状態で取り付けられている。
【0060】
また、検出板47は、板本体51と、この板本体51から屈曲した屈曲部52とを備え、この屈曲部52には、前記掘削チェーン17側へ突出する突起部53が形成されている。この突起部53の下面は、上方へ向かうに従い掘削チェーン17側へ傾斜するカム面(内側面)53aとされている。
【0061】
そして、検出板47は、前記巻ばね(図示せず)の付勢力により第二延長カバー26の内側へ揺動した板本体51と規制ブロック48とが当接することによって、当該板本体51の下部が掘削チェーン17側へ傾斜して配置されるとともに屈曲部52が下に向けて配置され、このときの前記突起部53と掘削チェーン17との間の距離が後述する異物許容寸法D2に設定されている。
【0062】
また、検出板47の上端部には、前記水平軸J1が貫通する軸受け部材54が設けられている。この軸受け部材54には、第二延長カバー26の外側へ延びるブラケット部54aが形成され、このブラケット部54aの先端部に水平軸J1の軸線方向に沿った貫通孔54bが形成されている。
【0063】
規制レバー49は、第二延長カバー26の外側面に突設されたブラケット55に対し前記軸J1と平行な軸J2回りに片持ち状に軸支されている。この規制レバー49の先端部には前記軸受け部材54の貫通孔54bと合致する貫通孔55aが形成されている。すなわち、規制レバー49、ブラケット55及び軸J2により第二規制手段が構成されている。
【0064】
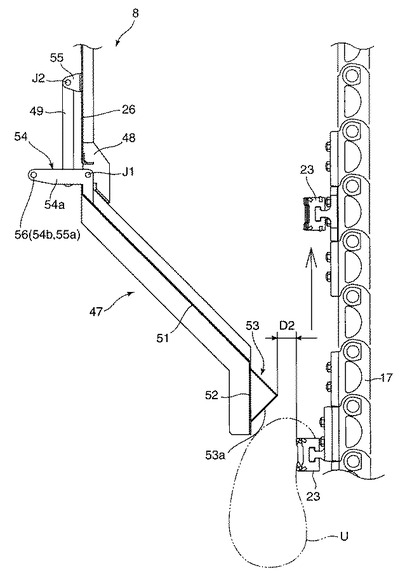
そして、この貫通孔55a及び前記貫通孔54bに規制ピン56を挿通することにより、検出板47が第二延長カバー26の外側へ揺動するのが規制される(以下、この状態をロック状態と称す)。一方、前記規制ピン56を両貫通孔54b、55aから引き抜くことにより、図6に示すように、検出板47の第二延長カバー26の外側への揺動が許容される(以下、この状態を解除状態と称す)。
【0065】
すなわち、図5に示すロック状態では、前記掘削チェーン17のカッタービット23に付着した土砂等の異物が、カバー体8の内側位置で脱離して矢印Y1に示すように第二延長カバー26の周囲に飛散しようとした場合であっても、当該第二延長カバー26に対し内側に傾斜した検出板47に衝突して、矢印Y2に示すように掘削チェーン17側へ方向転換させることができ、これにより、カバー体8から導出される異物の落下範囲を狭めることができる。
【0066】
一方、図6に示す解除状態とすることにより、予め設定された異物許容寸法D2以上の異物Uがカバー体8の内部への進入するのを防止することができる。
【0067】
すなわち、前記解除状態では、掘削チェーン17のカッタービット23と突起部53との間の距離が異物許容寸法D2に設定されているとともに、検出板47が第二延長カバー26の外側へ揺動することが許容されている。
【0068】
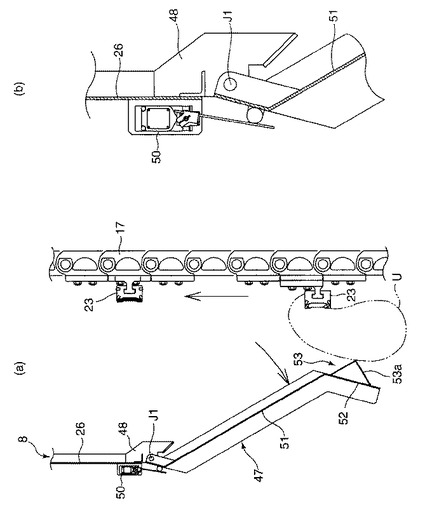
そのため、異物許容寸法D2以上の大きさの異物Uの付着したカッタービット23が第二延長カバー26の内側へ進入しようとすると、図7の(a)に示すように、異物Uが突起部53のカム面53aに対し摺動することにより検出板47が第二延長カバー26の外側へ押し広げられることになる。
【0069】
そして、このように揺動する検出板47によって、図7の(b)に示すように、第二延長カバー26の外側面に設けられたリミットスイッチ50が押し込まれ、当該検出板47の揺動が検知される。
【0070】
なお、本実施形態に係る掘削機1には、前述した構成を制御するコントローラ60が設けられている。
【0071】
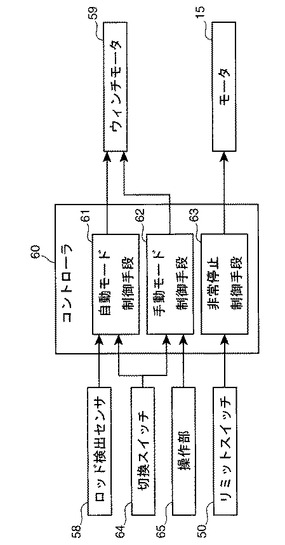
図8は、図1の掘削機1に搭載されたコントローラの要部を示すブロック図である。
【0072】
図8を参照して、コントローラ60は、各種演算処理を実行するCPU、初期設定等の記憶領域として使用されるRAM又はROM等により構成され、自動モード制御手段61、手動モード制御手段62又は非常停止制御手段63として主に機能するようになっている。
【0073】
具体的に、コントローラ60は、前記上部旋回体4に設けられた切換スイッチ64の入力操作によって前記自動モード制御手段61を機能させる自動モードと手動モード制御手段62を機能させる手動モードとを切換えることが可能に構成されている。
【0074】
自動モード制御手段61は、前記ロッド検出センサ58により検出された昇降シリンダ7のロッドの昇降位置に基づいて地表に露出する掘削チェーン17の高さ寸法を特定し、この高さ寸法の範囲について掘削チェーン17を取り囲むことができる分だけウィンチモータ59を駆動させてカバー体8を延長させる。なお、本実施形態では、常時、ロッドの昇降位置を検出してカバー体を伸縮するように構成されているが、前記ロッド検出センサ58の検出タイミングは、所定時間ごとに行なってもよい。
【0075】
手動モード制御手段62は、前記上部旋回体4に設けられたレバー等からなる操作部65による乗員の入力操作の分だけウィンチモータ59を駆動してカバー体8を伸縮するように構成されている。
【0076】
非常停止制御手段63は、前記リミットスイッチ50により検出板47が揺動したことが検出された場合(図7に示す場合)に、掘削チェーン17駆動用のモータ15を停止させるようになっている。
【0077】
以下、図1〜図3を参照して、前記掘削機1を用いた掘削作業のうち、まずカッター本体16を引き上げる手順について説明する。
【0078】
掘削作業の実行時には、図1に示すように、昇降シリンダ7が最も短縮した位置、すなわち、カバー体8が短縮姿勢とされた状態で、かつ、前記検出板47の下端部が地表の高さ位置とされている。
【0079】
この状態から、前記切換スイッチ64の入力操作により自動モードに切換えるとともに昇降シリンダ7を伸張すると、掘削体6の上昇動作に応じてカバー体8が延長するようにコントローラ60がウィンチモータ59を作動させる。その結果、終には、図3の右側に示すように、カバー体8が延長姿勢となり、掘削体6が上昇しているにもかかわらず、掘削チェーン17の地上部分を覆う状態となる。
【0080】
次いで、前記モータ15を停止して掘削チェーン17の循環駆動を停止して、前記切換スイッチ64の入力操作により手動モードに切換えるとともにウィンチモータ59を駆動することにより、図3の左側に示すように、カバー体8を短縮姿勢とする。
【0081】
これにより、短縮姿勢から延長姿勢までのストロークD1の分だけ、掘削チェーン17が側方へ開放されるので、この状態で、地上にて開放された中間掘削フレーム20を他の掘削フレーム19〜21から切り離すとともに、当該中間フレーム20に沿って設けられた掘削チェーン17を切り離して、当該中間掘削フレーム20及び掘削チェーン17を抜き取る。
【0082】
次いで、中間掘削フレーム20の長さ寸法の分だけ昇降シリンダ7を短縮することにより掘削体6を下降させて、上側掘削フレーム19に対し他の中間掘削フレーム20又は21を連結し、さらに昇降シリンダ7を短縮して掘削体6を最下降位置まで下降させることにより、図1又は図2の状態とする。
【0083】
そして、上述した手順を繰り返し行うことによりカッター本体16を地上へ引き抜くことができる。
【0084】
次いで、カッター本体16を地中に挿入する(立て込む)手順について説明する。
【0085】
まず、カッター本体16を、上側掘削フレーム19と下側掘削フレーム21とを連結するとともにこれら掘削フレーム19、21に対応する掘削チェーン17をそれぞれ連結した状態とする(すなわち、中間掘削フレーム20及びこれに対応する掘削チェーン17を連結しない状態とする)。
【0086】
次いで、地表に露出したカッター本体16(掘削チェーン17)を取り囲むようにカバー体8を延長し、前記切換スイッチ64の入力装置により自動モードに切換えた上で、前記モータ15を作動して掘削チェーン17を循環駆動し、この状態で、掘削体6を下降させる。
【0087】
これにより、カッター本体16は、予め形成された掘削穴内に挿入される。このとき、掘削チェーン17により前記掘削穴の一部が削られ、この際に土砂等の異物が掘削チェーン17の循環駆動により地表へ導かれることになるが、この土砂は前記カバー体8により外側へ飛散することはない。
【0088】
さらに、掘削体6の下降時には、前記昇降シリンダ7の短縮に応じてカバー体8が短縮する。
【0089】
そして、掘削体6が予め設定された位置(掘削体6が最も下降する手前側の位置)まで下降すると、当該掘削体6の下降を停止するとともに前記モータ15を停止することにより掘削チェーン17の循環駆動を停止する。
【0090】
次いで、前記切換スイッチ64の入力装置により手動モードに切換えるとともにウィンチモータ59を駆動することにより、図3の左側に示すように、カバー体8を短縮姿勢とする。
【0091】
これにより、地表に露出したカッター本体16の一部がカバー体8から開放されるので、この状態で、地上にて上側掘削フレーム19と下側掘削フレーム20とを切り離すとともに、これら掘削フレーム19、20の間に中間掘削フレーム21を継ぎ足す。
【0092】
その後、カバー体8を延長してカッター本体16を取り囲むとともに自動モードに切換えた上で、掘削チェーン17を循環駆動させながら掘削体6を下降し、中間掘削フレーム20を継ぎ足す上述した手順を繰り返すことになる。
【0093】
以上説明したように、上記実施形態に係る掘削機1によれば、掘削体6に設けられたカバー体8が、延長姿勢と短縮姿勢との間で伸縮自在に構成されているので、掘削体6の昇降位置にかかわらず地表に露出する掘削チェーン17を掘削フレーム19〜21の軸線回りに取り囲んで土砂が飛散するのを確実に防止することができる。
【0094】
そして、前記掘削体6は、基部カバー24とこの基部カバー24の外側の領域を通って当該基部カバー24に対し相対変位自在な各延長カバー25、26とを有するテレスコープ型に形成されているので、各カバー24〜26に金属材料等、強度高い材質を有する材料を用いながら当該各カバー19〜21の相対変位によってカバー体8確実に伸縮することができる。
【0095】
また、前記実施形態のようにウィンチモータ59によりカバー体8を伸縮するように構成すれば、掘削チェーン17のメンテナンスを行う際等に、伸縮駆動部27を作動させることにより、地表から露出する部分について、掘削チェーン17をカバー体8から開放することができる。
【0096】
さらに、前記実施形態のようにロッド検出センサ58により検出された掘削体6の昇降位置に基づいて、カバー体8が地表から露出した掘削チェーン17を取り囲むことができる長さとなるようにウィンチモータ59の駆動を制御するに構成すれば、昇降シリンダ7による掘削体6の昇降動作に同期してカバー体8を伸縮させることにより、掘削体6の昇降位置に応じて、地表に露出した掘削チェーン17を取り囲むことができるようにカバー体8の長さを自動的に調整することができる。
【0097】
また、前記実施形態のようにウィンチモータ59を基部カバー24の上端に設けた構成とすることにより、掘削チェーン17の循環駆動によってカバー体8の内側で多数の土砂等が飛散している場合であっても、当該土砂等がウィンチモータに与える影響を低減することができる。
【0098】
そして、カバー体8に進入する掘削チェーン17のカッタービット23に対し異物許容寸法D2よりも大きな異物Uが付着している場合に、掘削チェーン17の循環駆動を停止させる前記実施形態によれば、異物許容寸法D2以上の大きさの異物Uがカバー体8の深部(上部)へ進入するのを未然に防止することにより、当該カバー体8の内側に配設される構成部品(例えば、モータ15)の破損を抑制することができる。
【0099】
ここで、規制レバー49を検出板47に連結することにより、カバー体8の外側への検出板47の揺動を規制するようにした前記実施形態によれば、検出板47をカバー体8の内側へ揺動した姿勢で保持することにより検出板47と掘削チェーン17との間の隙間を小さくした状態を維持することができるので、カッタービット23に異物許容寸法D2よりも小さな異物Uがカバー体8の内側へ進入しこの異物Uがカバー体8の内側で離脱した場合に、当該異物Uがカバー体8の外側へ落下するための範囲をカバー体8とカッタービット23との狭い隙間に限定して、当該異物Uの飛散範囲をより小さくすることができる。
【0100】
一方、規制レバー49から軸J2を引き抜くことによりカバー体8の外側への検出板47の揺動を許容した場合には、前記リミットスイッチ50とコントローラ60とによってカバー体8の深部へ大きな異物Uが進入するのを防止することができる。
【0101】
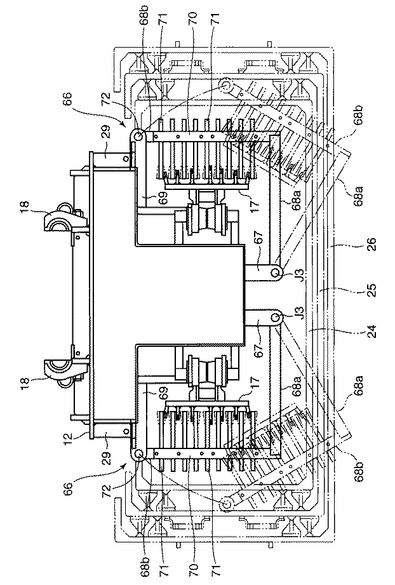
なお、上述した実施形態に加えて、図9及び図10に示すように、掻き取り部材66を設けることにより、掘削チェーン17を清掃することができる。
【0102】
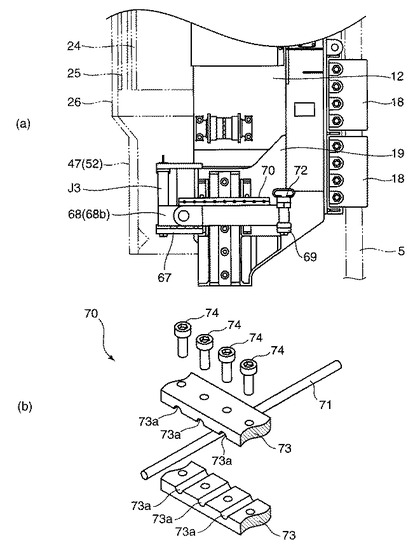
図9は、本発明の別の実施形態に係る掘削機を示す図4相当図である。図10の(a)は図9の掻き取り部材を拡大して示す左側面図であり、(b)は(a)の挟持部材を分解して示す斜視図である。なお、上述した実施形態と同様の構成については、同一の符号を付してその説明を省略する。
【0103】
掻き取り部材66は、前記上側掘削フレーム19から前方へ延びる左右一対のブラケット67と、これらブラケット67に対し上下軸J3回りに揺動自在に支持された左右一対のアーム68と、前記下側掘削フレーム21から左右両側へ延びる一対の支持部69と、各アーム68上にそれぞれ設けられた挟持部70と、この挟持部70に挟持された複数のブラシ片71とを備えている。
【0104】
前記ブラケット67及び支持部69は、それぞれ前記第二延長フレーム26に取り囲まれた共通の高さ位置で、下側掘削フレーム21に固定されている。
【0105】
アーム68は、平面視L字型に形成された部材であり、一方の端末が前記上下軸J3に軸支されているとともに、他方の端末が連結ピン72を挿抜することにより前記支持部69に着脱自在とされている。
【0106】
したがって、連結ピン72により支持部69に固定されたアーム68は、平面視でその一方の辺68aが左右方向に沿って配置されるとともに、他方の辺68bが前後方向に沿って配置される。
【0107】
挟持部70は、前記アーム68の辺68b上に設けられている。また、挟持部70は、上下に対をなす板材73と、これら板材73を上下に貫く複数のボルト74とを備え、当該各ボルト74を締結することにより各板材73に相対向して形成された複数の凹溝73a内で各ブラシ片71をそれぞれ挟持するようになっている。
【0108】
具体的に、各凹溝73内で挟持された各ブラシ71は、各アーム68が連結ピン72により固定された状態において、それぞれ左右方向に沿って配置され、それぞれの内側の端末が前後に並ぶ複数のカッタービット23の間に配置されるようになっている。
【0109】
この実施形態によれば、掘削体6に固定された各ブラシ片71と、循環駆動するカッタービット23とが相対的に移動する過程で、各ブラシ片71によってカッタービット23に付着した土砂等を除去することができるので、掘削作業とカッタービット23の清掃作業とを並行して行うことができ、カッタービット23を清掃する手間を軽減することができる。
【0110】
特に、前記実施形態では、カバー体8によって取り囲まれた範囲(上下位置)に掻き取り部材66が設けられているので、当該掻き取り部材66によって掻き取られた土砂等の異物が周囲に飛散するのをカバー体8によって防止しながら、カッタービット23を清掃することができる。
【0111】
なお、前記実施形態では、基部カバー24の外側に各延長カバー25、26を嵌め込んだ構成について説明しているが、各延長カバー25、26を基部カバー24の内側に嵌め込んだ構成とすることもでき、また、各延長カバー25、26の数量は2つに限定されることはない。
【0112】
また、前記実施形態では、カバー体8を、ウィンチモータ59によるロープ44の巻上げ又は巻下げにより伸縮させるようにしているが、前記伸縮駆動手段27は、この構成に限定されることはなく、例えば、油圧シリンダのロッドの伸縮動作によりカバー体8を伸縮させるように構成することもできる。
【0113】
さらに、前記実施形態では、掘削体6を最も下降させた状態において、短縮姿勢とされたカバー体8の下端部が地面に接触する長さ寸法に設定されているが、カバー体8の長さ寸法は、必ずしも地面に接触するように設定する必要はなく、少なくともカバー体8と地面との間を通して土砂が周囲に飛散されない範囲で調整することができる。
【図面の簡単な説明】
【0114】
【図1】本発明の実施形態に係る掘削機を示す側面図である。
【図2】図1の掘削機の正面図である。
【図3】図1の駆動装置の一部を省略して示す正面断面図である。
【図4】図3のIV−IV線断面図である。
【図5】図3の異物検出手段を拡大して示す正面断面図である。
【図6】図5の異物検出手段を解除状態とした正面断面図である。
【図7】(a)は、図5の異物検出手段の検出板がカバー体の外側へ揺動した状態を示す正面断面図であり、(b)は(a)の一部を拡大して示す図である。
【図8】図1の掘削機の電気的構成を示すブロック図である。
【図9】本発明の別の実施形態に係る掘削機を示す図4相当図である。
【図10】(a)は、図9の掻き取り部材を拡大して示す左側面図であり、(b)は、(a)の挟持部材を分解して示す斜視図である。
【符号の説明】
【0115】
D1 ストローク(昇降駆動部の昇降範囲に対応する距離)
D2 異物許容寸法(予め設定された大きさ)
J1 水平軸
J2 軸(第二規制手段)
U 異物
1 掘削機
2 ベースマシン
5 リーダ
6 掘削体
7 昇降シリンダ(昇降駆動部)
8 カバー体
15 モータ(駆動部)
17 掘削チェーン(無端状体)
19 上側掘削フレーム(掘削フレーム)
20 中間掘削フレーム(掘削フレーム)
21 下側掘削フレーム(掘削フレーム)
23 カッタービット(掘削刃)
24 基部カバー
25 第一延長カバー(延長カバー)
26 第二延長カバー(延長カバー)
27 伸縮駆動手段(伸縮駆動部)
40 異物検出手段
47 検出板
48 規制ブロック(規制手段)
49 規制レバー(第二規制手段)
50 リミットスイッチ(揺動位置検出手段)
55 ブラケット(第二規制手段)
56 規制ピン(第二規制手段)
58 ロッド検出センサ(検出手段)
60 コントローラ(制御手段)
66 掻き取り部材
【技術分野】
【0001】
本発明は、地中に止水用、基礎用等の地中連続壁を造成するための連続溝を掘削する掘削機に関するものである。
【背景技術】
【0002】
従来から、掘削機として、ベースマシンに昇降自在に装着された掘削体を有し、この掘削体を昇降させることにより地中の土砂を掘削するものが知られている。
【0003】
この種の掘削機では、掘削体を引き上げる際に、当該掘削体に付着した土砂等が周囲に飛散するおそれがあった。
【0004】
このような土砂の飛散を防止する技術として、バケット式の掘削機において掘削バケットの周囲を取り囲む掘削バケット用シート装置が知られている(例えば、特許文献1)。
【0005】
前記シート装置は、掘削バケットが地中に挿入された際に地上に残されて折り畳み状態に変位するとともに、掘削バケットを地上へ引き上げた際に自重で伸張状態となって掘削バケットを覆うように形成された蛇腹状のシートにより構成されている。
【特許文献1】実開平6−4190号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、前記掘削機としては、上下方向に延びる掘削フレームと、この掘削フレームの上下に配された回転体の間に掛け渡された掘削刃を有する無端状体と、この無端状体を循環駆動させる駆動部とを有する掘削体を備えたものが知られている。
【0007】
この種の掘削機は、前記無端状体を循環駆動させながら掘削体を下降させて、掘削刃にて地面を掘削するように構成されているため、前記特許文献1のシート装置を採用するのに適していない。
【0008】
すなわち、前記のように掘削刃を有する掘削機に対し前記特許文献1のシート装置を用いるためには当該シート装置に優れた柔軟性及び高い強度が要求される。これは、前記特許文献1の掘削機ではバケット開放時にバケット内に収納された静止状態にある土砂が飛散するため土砂等の運動エネルギーが比較的小さいのに対し、掘削刃を有する掘削機においては、掘削刃に付着していた土砂等が掘削刃の回転に伴って飛散するため土砂等の運動エネルギーが大きく、この運動エネルギーを吸収するための柔軟性及び強度がシート装置に要求されるためである。そして、これら双方の要求を満足したシート装置を形成するためには、シート素材として特殊な素材を用いる必要があることから高価なものとなりコスト面から採用することが困難だった。
【0009】
特に、前記のように上下方向に延びる掘削フレームを有する掘削機に特許文献1のシート装置を採用する場合には、その長さに対応してシート装置が長大なものとなるため、掘削フレームを地中に挿入する際にシート装置の折り畳みをスムーズに行なうためにより大きな柔軟性が必要となる。
【0010】
本発明は、上記課題に鑑みてなされたものであり、掘削フレームの引抜作業時において、地上での土砂の飛散を確実に防止することができる掘削機を提供することを目的としている。
【課題を解決するための手段】
【0011】
上記課題を解決するために、本発明は、上下方向に延びる掘削フレームとこの掘削フレームの上下に配された回転体の間に掛け渡された掘削刃を有する無端状体とこの無端状体を循環駆動させる駆動部とを有するとともにベースマシンに対して少なくとも昇降自在に装着された掘削体を備え、前記掘削体を下降させて掘削フレームを地中に挿入するとともに前記無端状体を前記駆動部によって循環駆動させることにより地中の土砂を掘削する掘削機であって、前記掘削体に設けられ、前記無端状体を掘削フレームの軸線回りに取り囲むカバー体をさらに備え、このカバー体は、前記掘削体に固定された基部カバーと、この基部カバーの内側又は外側の領域を通って当該基部カバーに対し前記軸線方向に相対変位自在に装着された延長カバーとを有し、前記カバー体は、前記基部カバーに対する前記延長カバーの相対移動により、前記掘削体がベースマシンに対し最も上昇した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む延長姿勢と、前記掘削体がベースマシンに対し最も下降した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む短縮姿勢とに切換可能となるように伸縮することを特徴とする掘削機を提供する。
【0012】
本発明によれば、掘削体に設けられたカバー体が、延長姿勢と短縮姿勢との間で伸縮自在に構成されているので、掘削体の昇降位置にかかわらず地表に露出する無端状体を掘削フレームの軸線回りに取り囲んで土砂が飛散するのを確実に防止することができる。
【0013】
そして、前記掘削体は、基部カバーとこの基部カバーの内側又は外側の領域を通って当該基部カバーに対し相対変位自在な延長カバーとを有するテレスコープ型に形成されているので、優れた柔軟性及び高い強度の双方を満足するシート材が要求される従来の技術と異なり、前記両カバーに金属材料等、強度の高い材質を有する材料を用いながら当該両カバーの相対変位によってカバー体を確実に伸縮させることができる。
【0014】
前記カバー体は、その自重で伸縮させるようにしてもよいが、前記掘削体を前記ベースマシンに対し昇降させる昇降駆動部と、前記カバー体を前記延長姿勢と短縮姿勢との間で伸縮させる伸縮駆動部とをさらに備えていることが好ましい。
【0015】
この構成によれば、無端状体のメンテナンスを行う際等に、伸縮駆動部を作動させることにより、地表から露出する部分について、無端状体をカバー体から開放することができる。
【0016】
さらに、前記昇降駆動部による掘削体の昇降位置を検出する検出手段と、この検出手段により検出された前記昇降位置に基づいて、前記カバー体が、地表から露出した前記無端状体を取り囲むことができる長さとなるように前記伸縮駆動部の駆動を制御する制御手段とを備えていることが特に好ましい。
【0017】
この構成によれば、昇降駆動部による掘削体の昇降動作に同期してカバー体を伸縮させることにより、当該掘削体の昇降位置に応じて、地表に露出した無端状体を取り囲むことができるようにカバー体の長さを自動的に調整することができる。
【0018】
前記掘削機において、前記掘削体には、前記カバー体によって取り囲まれた範囲内で前記無端状体の掘削刃に臨むように掻き取り部材が固定されていることが好ましい。
【0019】
この構成によれば、掘削体に固定された掻き取り部材と、循環駆動する掘削刃とが相対的に移動する過程で、前記掻き取り部材によって掘削刃に付着した土砂等の異物を除去することができるので、掘削作業と掘削刃の清掃作業とを並行して行うことができ、掘削刃を清掃する手間を軽減することができる。
【0020】
特に、上記構成では、カバー体によって取り囲まれた範囲内に掻き取り部材が設けられているので、当該掻き取り部材によって掻き取られた土砂等の異物が周囲に飛散するのをカバー体8によって防止しながら、掘削刃を清掃することができる。
【0021】
前記伸縮駆動部の具体的態様としては、前記基部カバーの上端に取り付けられたウィンチと、このウィンチを回転駆動するモータと、前記ウィンチの回転駆動により巻上げ又は巻下げられるロープとを備え、前記ロープの巻き上げ又は巻下げ動作に応じて前記延長カバーを基部カバーに対し昇降させることにより前記カバー体を伸縮させる構成とすることができる。
【0022】
この構成によれば、カバー体を伸縮させるウィンチモータを、前記基部カバーの上端に取り付けているので、無端状体の循環駆動によってカバー体の内側で多数の土砂等が飛散している場合であっても、当該土砂等がウィンチモータに与える影響を低減することができる。
【0023】
また、前記カバー体は、複数の延長カバーを有しており、各延長カバーは、これに隣接する延長カバーに対して相対移動可能に設けられていることが好ましい。
【0024】
この構成によれば、複数の延長カバーを備えているので、本体カバーの伸縮範囲をより長くすることができ、逆に、伸縮範囲を一定にした場合には、基部カバーや延長カバー1個当たりの長さを短くしてコンパクト化を図ることができる。
【0025】
さらに、前記カバー体の下端部には、当該カバー体に進入する前記無端状体の掘削刃に対し予め設定された大きさ以上の異物が付着しているか否かを検出する異物検出手段が設けられているとともに、この異物検出手段により前記大きさ以上の異物が検出された場合に、前記無端状体の循環駆動を停止させるように前記駆動部を制御する制御手段を備えていることが特に好ましい。
【0026】
この構成によれば、カバー体に進入する掘削刃に大きな異物が付着している場合に、無端状体の駆動を停止させることができるので、予め設定された大きさ以上の異物がカバー体の深部(上部)へ進入するのを未然に防止することにより、当該カバー体の内側に配設される構成部品(例えば、無端状体を駆動するモータ等)の破損を抑制することができる。
【0027】
具体的に、前記異物検出手段は、その上端部が前記カバー体の下端部に水平軸回りに揺動自在に支持された検出板と、この検出板をカバー体の内側へ揺動する方向へ付勢する付勢手段と、前記検出板の下端部が前記予め設定された大きさに対応する距離だけ前記掘削刃から離間した位置となるように当該検出板のカバー体の内側への揺動を規制する規制手段と、前記検出板がカバー体の外側に揺動したか否かを検出する揺動位置検出手段とを備え、前記検出板の下端部には、上方へ向かうに従いカバー体の内側へ傾斜する内側面が形成され、この内側面とカバー体の内側へ進入する掘削刃に付着した前記予め設定された大きさ以上の異物とが摺接することにより、前記検出板がカバー体の外側に揺動する構成とすることができる。
【0028】
この構成によれば、カバー体の内側へ進入する掘削刃に前記予め設定された大きさ以上の異物が付着している場合に、当該異物と検出板の内側面とが摺接することにより当該検出板がカバー体の外側へ揺動し、この揺動を揺動位置検出手段によって検出することにより、大きな異物が付着していることを検知して無端状体を停止させることができる。
【0029】
前記掘削機において、前記規制手段により規制された姿勢で前記検出板がカバー体の外側へ揺動するのを規制する第二規制手段をさらに備え、この第二規制手段は、検出板の揺動を規制する規制状態と当該揺動を許容する許容状態とに遷移自在に構成されていることが好ましい。
【0030】
この構成によれば、検出板をカバー体の内側へ揺動した姿勢で保持することにより検出板と無端状体との間の隙間を小さくした状態を維持することができるので、掘削刃に前記予め設定された大きさよりも小さな異物がカバー体の内側へ進入しこの異物がカバー体の内側で離脱した場合に、当該異物がカバー体の外側へ落下するための範囲をカバー体と掘削刃との狭い隙間に限定して、当該異物の飛散範囲をより小さくすることができる。
【0031】
一方、前記第二規制手段は、カバー体の外側への検出板の揺動を許容する状態にも遷移自在とされているので、この許容状態とした場合には、上述した異物検出手段と制御手段とによってカバー体の深部へ大きな異物が進入するのを防止することができる。
【発明の効果】
【0032】
本発明によれば、掘削フレームの引抜作業時において、地上での土砂の飛散を確実に防止することができる。
【発明を実施するための最良の形態】
【0033】
以下、本発明の好ましい実施形態について図面を参照して説明する。
【0034】
図1は、本発明の実施形態に係る掘削機を示す側面図である。図2は、図1の掘削機の正面図である。
【0035】
図1及び図2を参照して、掘削機1は、ベースマシン2を備えている。このベースマシン2は、クローラ3aが設けられた下部走行体3と、この下部走行体3上に旋回可能に配置された上部旋回体4とを備えている。
【0036】
上部旋回体4は、その前部に立設されたリーダ5と、このリーダ5に対し昇降自在に取り付けられた掘削体6と、この掘削体6を昇降させる昇降シリンダ(昇降駆動部)7と、前記掘削体6に装着されたカバー体8とを備えている。
【0037】
リーダ5は、上下に延びる筒状をなし、その上部に設けられたブラケット9がステー10を介して上部旋回体4の所定部位に連結されている。このリーダ5には、上下に延びる左右一対のレール11が固定され、これらレール11に沿って前記掘削体6がスライド自在に装着されている。
【0038】
図3は、図1の掘削体6の一部を省略して示す正面断面図である。図4は、図3のIV−IV線断面図である。
【0039】
図1〜図4を参照して、掘削体6は、ベース12と、このベース12に設けられたスプロケット14及びこれを回転駆動するモータ(駆動部)15と、前記ベース12から下方に延びるカッター本体16と、このカッター本体16と前記スプロケット14との間に掛け渡される掘削チェーン(無端状体)17とを備え、前記ベース12及びカッター本体16がスライダ18を介して前記レール11に装着されている。
【0040】
カッター本体16は、前記ベース12の下端部に連結された上側掘削フレーム19と、この上側掘削フレーム19の下端部に着脱自在に連結された中間掘削フレーム20と、この中間掘削フレーム20の下端部に着脱自在に連結された下側掘削フレーム21と、この下側掘削フレーム21の下端部に装着されたアイドラ22(図1及び図2参照)とを備えている。
【0041】
そして、このアイドラ22と前記スプロケット14との間に、表面に前後に並ぶ複数のカッタービット23(掘削刃:図4参照)をもつ無端状の掘削チェーン17が掛け渡されることにより、前記スプロケット14、モータ15及びカッター本体16によってチェーン式カッターが構成されている。
【0042】
なお、本実施形態では、上側掘削フレーム19と下側掘削フレーム21との間に、複数の中間掘削フレーム20及び掘削チェーン17を継ぎ足すことにより、カッター本体16を上下方向に延長することが可能とされている。
【0043】
前記昇降シリンダ7は、前記レール11が形成された範囲内、すなわち、予め設定された昇降範囲(例えば、5m)で、掘削体6を昇降するようになっている。
【0044】
また、昇降シリンダ7には、そのロッドの伸縮位置を検出するロッド検出センサ58(図8参照)が設けられている。このロッド検出センサ58は、例えば、ロッドの伸縮動作に従動するケーブルと、このケーブルを巻き取る方向に付勢されたケーブルリールと、このケーブルリールの回転位置を検出するロータリーエンコーダとを備えた構成とすることができる。
【0045】
カバー体8は、前記掘削体6に固定された基部カバー24と、この基部カバー24の外側に嵌め込まれた第一延長カバー25と、この第一延長カバー25の外側に嵌め込まれた第二延長カバー26と、この第二延長カバー26の下端部に取り付けられた異物検出手段40と、これら各延長カバー24、25を基部カバー24に対し伸縮させる伸縮駆動手段(伸縮駆動部)27とを備え、各カバー24〜26により前記掘削チェーン17を前記掘削フレーム19〜21の軸線(上下軸)回りに取り囲むように構成されている。
【0046】
基部カバー24は、長手方向を左右に向けた断面略長方形で、かつ、下方へ開く有底容器状に形成されている。また、基部カバー24の後部壁面には、当該壁面を貫く切り欠き部28が形成され、この切り欠き部28の縁部が前記ベース12に対しブラケット29を介して固定されている。
【0047】
また、基部カバー24の左右の外側面には、上下方向に延びるレール30と、ガイドローラ31とが設けられている。
【0048】
第一延長カバー25及び第二延長カバー26は、それぞれ長手方向を左右方向に向けた断面略長方形に形成されているとともに、前記ベース12との干渉を避けるようにその後部壁面を貫通する切り欠き部32及び切り欠き部37がそれぞれ形成された部材である。
【0049】
第一延長カバー25の左右の内側面には、前記レール30に転がり接触するガイドローラ33と、上下に延びて前記ガイドローラ31を転がり接触自在に支持するレール34とが設けられている。一方、第一延長カバー25の左右の外側面には、上下に延びるレール35と、ガイドローラ36とが設けられている。
【0050】
第二延長カバー26の左右の内側面には、前記レール35に転がり接触するガイドローラ38と、上下に延びて前記ガイドローラ36を転がり接触自在に支持するレール39とが設けられている。
【0051】
そして、前記第一延長カバー25の左右の外側面には、後述するロープ44が掛けられるシーブ41が設けられている一方、第二延長カバー26の左右上端部には、ロープ44が掛けられるシーブ42(図3参照)が設けられている。
【0052】
伸縮駆動手段27は、図3に示すように、前記基部カバー24の上面(上端)に固着された左右一対のウィンチ43と、これらウィンチ43にそれぞれ巻回された一対のロープ44と、前記ウィンチ43を回転駆動するウィンチモータ59(図8参照)とを備え、このウィンチモータ59の駆動によって各ウィンチ43を回転させることにより、各ロープ44をそれぞれ巻上げ又は巻下げすることが可能とされている。
【0053】
前記ロープ44は、基部カバー24に設けられたシーブ45を介して前記第一延長カバー25のシーブ41に掛け渡されて上方に向かい、前記第二延長カバー26のシーブ42に掛け渡されて、その下端部が取付部材46によって第二延長カバー26の外側面に固定されている。
【0054】
したがって、各ウィンチ43によりロープ44を巻き上げることにより、カバー体8を図3の左側に示す短縮姿勢として掘削チェーン17を開放することができる一方、各ウィンチ43によりロープ44を巻下げることにより、カバー体8を図3の右側に示す延長姿勢として掘削チェーン17を掘削フレーム19〜21の軸線(上下軸)回りに取り囲むことができる。
【0055】
そして、前記短縮姿勢から延長姿勢までのストロークD1が、前記昇降シリンダ7の昇降範囲と略同一とされている。
【0056】
図5は、図3の異物検出手段40を拡大して示す正面断面図である。
【0057】
図3及び図5を参照して、異物検出手段40は、前記第二延長カバー26に対しそれぞれ水平軸J1回りに揺動自在に取り付けられた3枚の検出板47を備えている。すなわち、各検出板47は、第二延長カバー26の左右側壁に対してそれぞれ前後方向に延びる水平軸J1回りに、前壁に対して左右方向に延びる水平軸J1(図示せず)回りに揺動自在とされている。以下、右側に設けられた検出板47及びその周囲の構成のみについて説明する。
【0058】
異物検出手段40は、前記検出板47と、この検出板47を第二延長カバー26の内側へ揺動する方向へ付勢する図略の巻ばね(付勢手段)と、前記検出板47の第二延長カバー26の内側への揺動を規制する規制ブロック(規制手段)48と、検出板47の第二延長カバー26の外側への揺動を規制する規制レバー49と、検出板47が第二延長カバー26の外側に揺動したか否かを検出するリミットスイッチ(揺動位置検出手段)50(図7参照)とを備えている。
【0059】
検出板47は、図略の付勢手段によって、その下端部が掘削チェーン17側へ向くように前記水平軸J1回りに付勢された状態で取り付けられている。
【0060】
また、検出板47は、板本体51と、この板本体51から屈曲した屈曲部52とを備え、この屈曲部52には、前記掘削チェーン17側へ突出する突起部53が形成されている。この突起部53の下面は、上方へ向かうに従い掘削チェーン17側へ傾斜するカム面(内側面)53aとされている。
【0061】
そして、検出板47は、前記巻ばね(図示せず)の付勢力により第二延長カバー26の内側へ揺動した板本体51と規制ブロック48とが当接することによって、当該板本体51の下部が掘削チェーン17側へ傾斜して配置されるとともに屈曲部52が下に向けて配置され、このときの前記突起部53と掘削チェーン17との間の距離が後述する異物許容寸法D2に設定されている。
【0062】
また、検出板47の上端部には、前記水平軸J1が貫通する軸受け部材54が設けられている。この軸受け部材54には、第二延長カバー26の外側へ延びるブラケット部54aが形成され、このブラケット部54aの先端部に水平軸J1の軸線方向に沿った貫通孔54bが形成されている。
【0063】
規制レバー49は、第二延長カバー26の外側面に突設されたブラケット55に対し前記軸J1と平行な軸J2回りに片持ち状に軸支されている。この規制レバー49の先端部には前記軸受け部材54の貫通孔54bと合致する貫通孔55aが形成されている。すなわち、規制レバー49、ブラケット55及び軸J2により第二規制手段が構成されている。
【0064】
そして、この貫通孔55a及び前記貫通孔54bに規制ピン56を挿通することにより、検出板47が第二延長カバー26の外側へ揺動するのが規制される(以下、この状態をロック状態と称す)。一方、前記規制ピン56を両貫通孔54b、55aから引き抜くことにより、図6に示すように、検出板47の第二延長カバー26の外側への揺動が許容される(以下、この状態を解除状態と称す)。
【0065】
すなわち、図5に示すロック状態では、前記掘削チェーン17のカッタービット23に付着した土砂等の異物が、カバー体8の内側位置で脱離して矢印Y1に示すように第二延長カバー26の周囲に飛散しようとした場合であっても、当該第二延長カバー26に対し内側に傾斜した検出板47に衝突して、矢印Y2に示すように掘削チェーン17側へ方向転換させることができ、これにより、カバー体8から導出される異物の落下範囲を狭めることができる。
【0066】
一方、図6に示す解除状態とすることにより、予め設定された異物許容寸法D2以上の異物Uがカバー体8の内部への進入するのを防止することができる。
【0067】
すなわち、前記解除状態では、掘削チェーン17のカッタービット23と突起部53との間の距離が異物許容寸法D2に設定されているとともに、検出板47が第二延長カバー26の外側へ揺動することが許容されている。
【0068】
そのため、異物許容寸法D2以上の大きさの異物Uの付着したカッタービット23が第二延長カバー26の内側へ進入しようとすると、図7の(a)に示すように、異物Uが突起部53のカム面53aに対し摺動することにより検出板47が第二延長カバー26の外側へ押し広げられることになる。
【0069】
そして、このように揺動する検出板47によって、図7の(b)に示すように、第二延長カバー26の外側面に設けられたリミットスイッチ50が押し込まれ、当該検出板47の揺動が検知される。
【0070】
なお、本実施形態に係る掘削機1には、前述した構成を制御するコントローラ60が設けられている。
【0071】
図8は、図1の掘削機1に搭載されたコントローラの要部を示すブロック図である。
【0072】
図8を参照して、コントローラ60は、各種演算処理を実行するCPU、初期設定等の記憶領域として使用されるRAM又はROM等により構成され、自動モード制御手段61、手動モード制御手段62又は非常停止制御手段63として主に機能するようになっている。
【0073】
具体的に、コントローラ60は、前記上部旋回体4に設けられた切換スイッチ64の入力操作によって前記自動モード制御手段61を機能させる自動モードと手動モード制御手段62を機能させる手動モードとを切換えることが可能に構成されている。
【0074】
自動モード制御手段61は、前記ロッド検出センサ58により検出された昇降シリンダ7のロッドの昇降位置に基づいて地表に露出する掘削チェーン17の高さ寸法を特定し、この高さ寸法の範囲について掘削チェーン17を取り囲むことができる分だけウィンチモータ59を駆動させてカバー体8を延長させる。なお、本実施形態では、常時、ロッドの昇降位置を検出してカバー体を伸縮するように構成されているが、前記ロッド検出センサ58の検出タイミングは、所定時間ごとに行なってもよい。
【0075】
手動モード制御手段62は、前記上部旋回体4に設けられたレバー等からなる操作部65による乗員の入力操作の分だけウィンチモータ59を駆動してカバー体8を伸縮するように構成されている。
【0076】
非常停止制御手段63は、前記リミットスイッチ50により検出板47が揺動したことが検出された場合(図7に示す場合)に、掘削チェーン17駆動用のモータ15を停止させるようになっている。
【0077】
以下、図1〜図3を参照して、前記掘削機1を用いた掘削作業のうち、まずカッター本体16を引き上げる手順について説明する。
【0078】
掘削作業の実行時には、図1に示すように、昇降シリンダ7が最も短縮した位置、すなわち、カバー体8が短縮姿勢とされた状態で、かつ、前記検出板47の下端部が地表の高さ位置とされている。
【0079】
この状態から、前記切換スイッチ64の入力操作により自動モードに切換えるとともに昇降シリンダ7を伸張すると、掘削体6の上昇動作に応じてカバー体8が延長するようにコントローラ60がウィンチモータ59を作動させる。その結果、終には、図3の右側に示すように、カバー体8が延長姿勢となり、掘削体6が上昇しているにもかかわらず、掘削チェーン17の地上部分を覆う状態となる。
【0080】
次いで、前記モータ15を停止して掘削チェーン17の循環駆動を停止して、前記切換スイッチ64の入力操作により手動モードに切換えるとともにウィンチモータ59を駆動することにより、図3の左側に示すように、カバー体8を短縮姿勢とする。
【0081】
これにより、短縮姿勢から延長姿勢までのストロークD1の分だけ、掘削チェーン17が側方へ開放されるので、この状態で、地上にて開放された中間掘削フレーム20を他の掘削フレーム19〜21から切り離すとともに、当該中間フレーム20に沿って設けられた掘削チェーン17を切り離して、当該中間掘削フレーム20及び掘削チェーン17を抜き取る。
【0082】
次いで、中間掘削フレーム20の長さ寸法の分だけ昇降シリンダ7を短縮することにより掘削体6を下降させて、上側掘削フレーム19に対し他の中間掘削フレーム20又は21を連結し、さらに昇降シリンダ7を短縮して掘削体6を最下降位置まで下降させることにより、図1又は図2の状態とする。
【0083】
そして、上述した手順を繰り返し行うことによりカッター本体16を地上へ引き抜くことができる。
【0084】
次いで、カッター本体16を地中に挿入する(立て込む)手順について説明する。
【0085】
まず、カッター本体16を、上側掘削フレーム19と下側掘削フレーム21とを連結するとともにこれら掘削フレーム19、21に対応する掘削チェーン17をそれぞれ連結した状態とする(すなわち、中間掘削フレーム20及びこれに対応する掘削チェーン17を連結しない状態とする)。
【0086】
次いで、地表に露出したカッター本体16(掘削チェーン17)を取り囲むようにカバー体8を延長し、前記切換スイッチ64の入力装置により自動モードに切換えた上で、前記モータ15を作動して掘削チェーン17を循環駆動し、この状態で、掘削体6を下降させる。
【0087】
これにより、カッター本体16は、予め形成された掘削穴内に挿入される。このとき、掘削チェーン17により前記掘削穴の一部が削られ、この際に土砂等の異物が掘削チェーン17の循環駆動により地表へ導かれることになるが、この土砂は前記カバー体8により外側へ飛散することはない。
【0088】
さらに、掘削体6の下降時には、前記昇降シリンダ7の短縮に応じてカバー体8が短縮する。
【0089】
そして、掘削体6が予め設定された位置(掘削体6が最も下降する手前側の位置)まで下降すると、当該掘削体6の下降を停止するとともに前記モータ15を停止することにより掘削チェーン17の循環駆動を停止する。
【0090】
次いで、前記切換スイッチ64の入力装置により手動モードに切換えるとともにウィンチモータ59を駆動することにより、図3の左側に示すように、カバー体8を短縮姿勢とする。
【0091】
これにより、地表に露出したカッター本体16の一部がカバー体8から開放されるので、この状態で、地上にて上側掘削フレーム19と下側掘削フレーム20とを切り離すとともに、これら掘削フレーム19、20の間に中間掘削フレーム21を継ぎ足す。
【0092】
その後、カバー体8を延長してカッター本体16を取り囲むとともに自動モードに切換えた上で、掘削チェーン17を循環駆動させながら掘削体6を下降し、中間掘削フレーム20を継ぎ足す上述した手順を繰り返すことになる。
【0093】
以上説明したように、上記実施形態に係る掘削機1によれば、掘削体6に設けられたカバー体8が、延長姿勢と短縮姿勢との間で伸縮自在に構成されているので、掘削体6の昇降位置にかかわらず地表に露出する掘削チェーン17を掘削フレーム19〜21の軸線回りに取り囲んで土砂が飛散するのを確実に防止することができる。
【0094】
そして、前記掘削体6は、基部カバー24とこの基部カバー24の外側の領域を通って当該基部カバー24に対し相対変位自在な各延長カバー25、26とを有するテレスコープ型に形成されているので、各カバー24〜26に金属材料等、強度高い材質を有する材料を用いながら当該各カバー19〜21の相対変位によってカバー体8確実に伸縮することができる。
【0095】
また、前記実施形態のようにウィンチモータ59によりカバー体8を伸縮するように構成すれば、掘削チェーン17のメンテナンスを行う際等に、伸縮駆動部27を作動させることにより、地表から露出する部分について、掘削チェーン17をカバー体8から開放することができる。
【0096】
さらに、前記実施形態のようにロッド検出センサ58により検出された掘削体6の昇降位置に基づいて、カバー体8が地表から露出した掘削チェーン17を取り囲むことができる長さとなるようにウィンチモータ59の駆動を制御するに構成すれば、昇降シリンダ7による掘削体6の昇降動作に同期してカバー体8を伸縮させることにより、掘削体6の昇降位置に応じて、地表に露出した掘削チェーン17を取り囲むことができるようにカバー体8の長さを自動的に調整することができる。
【0097】
また、前記実施形態のようにウィンチモータ59を基部カバー24の上端に設けた構成とすることにより、掘削チェーン17の循環駆動によってカバー体8の内側で多数の土砂等が飛散している場合であっても、当該土砂等がウィンチモータに与える影響を低減することができる。
【0098】
そして、カバー体8に進入する掘削チェーン17のカッタービット23に対し異物許容寸法D2よりも大きな異物Uが付着している場合に、掘削チェーン17の循環駆動を停止させる前記実施形態によれば、異物許容寸法D2以上の大きさの異物Uがカバー体8の深部(上部)へ進入するのを未然に防止することにより、当該カバー体8の内側に配設される構成部品(例えば、モータ15)の破損を抑制することができる。
【0099】
ここで、規制レバー49を検出板47に連結することにより、カバー体8の外側への検出板47の揺動を規制するようにした前記実施形態によれば、検出板47をカバー体8の内側へ揺動した姿勢で保持することにより検出板47と掘削チェーン17との間の隙間を小さくした状態を維持することができるので、カッタービット23に異物許容寸法D2よりも小さな異物Uがカバー体8の内側へ進入しこの異物Uがカバー体8の内側で離脱した場合に、当該異物Uがカバー体8の外側へ落下するための範囲をカバー体8とカッタービット23との狭い隙間に限定して、当該異物Uの飛散範囲をより小さくすることができる。
【0100】
一方、規制レバー49から軸J2を引き抜くことによりカバー体8の外側への検出板47の揺動を許容した場合には、前記リミットスイッチ50とコントローラ60とによってカバー体8の深部へ大きな異物Uが進入するのを防止することができる。
【0101】
なお、上述した実施形態に加えて、図9及び図10に示すように、掻き取り部材66を設けることにより、掘削チェーン17を清掃することができる。
【0102】
図9は、本発明の別の実施形態に係る掘削機を示す図4相当図である。図10の(a)は図9の掻き取り部材を拡大して示す左側面図であり、(b)は(a)の挟持部材を分解して示す斜視図である。なお、上述した実施形態と同様の構成については、同一の符号を付してその説明を省略する。
【0103】
掻き取り部材66は、前記上側掘削フレーム19から前方へ延びる左右一対のブラケット67と、これらブラケット67に対し上下軸J3回りに揺動自在に支持された左右一対のアーム68と、前記下側掘削フレーム21から左右両側へ延びる一対の支持部69と、各アーム68上にそれぞれ設けられた挟持部70と、この挟持部70に挟持された複数のブラシ片71とを備えている。
【0104】
前記ブラケット67及び支持部69は、それぞれ前記第二延長フレーム26に取り囲まれた共通の高さ位置で、下側掘削フレーム21に固定されている。
【0105】
アーム68は、平面視L字型に形成された部材であり、一方の端末が前記上下軸J3に軸支されているとともに、他方の端末が連結ピン72を挿抜することにより前記支持部69に着脱自在とされている。
【0106】
したがって、連結ピン72により支持部69に固定されたアーム68は、平面視でその一方の辺68aが左右方向に沿って配置されるとともに、他方の辺68bが前後方向に沿って配置される。
【0107】
挟持部70は、前記アーム68の辺68b上に設けられている。また、挟持部70は、上下に対をなす板材73と、これら板材73を上下に貫く複数のボルト74とを備え、当該各ボルト74を締結することにより各板材73に相対向して形成された複数の凹溝73a内で各ブラシ片71をそれぞれ挟持するようになっている。
【0108】
具体的に、各凹溝73内で挟持された各ブラシ71は、各アーム68が連結ピン72により固定された状態において、それぞれ左右方向に沿って配置され、それぞれの内側の端末が前後に並ぶ複数のカッタービット23の間に配置されるようになっている。
【0109】
この実施形態によれば、掘削体6に固定された各ブラシ片71と、循環駆動するカッタービット23とが相対的に移動する過程で、各ブラシ片71によってカッタービット23に付着した土砂等を除去することができるので、掘削作業とカッタービット23の清掃作業とを並行して行うことができ、カッタービット23を清掃する手間を軽減することができる。
【0110】
特に、前記実施形態では、カバー体8によって取り囲まれた範囲(上下位置)に掻き取り部材66が設けられているので、当該掻き取り部材66によって掻き取られた土砂等の異物が周囲に飛散するのをカバー体8によって防止しながら、カッタービット23を清掃することができる。
【0111】
なお、前記実施形態では、基部カバー24の外側に各延長カバー25、26を嵌め込んだ構成について説明しているが、各延長カバー25、26を基部カバー24の内側に嵌め込んだ構成とすることもでき、また、各延長カバー25、26の数量は2つに限定されることはない。
【0112】
また、前記実施形態では、カバー体8を、ウィンチモータ59によるロープ44の巻上げ又は巻下げにより伸縮させるようにしているが、前記伸縮駆動手段27は、この構成に限定されることはなく、例えば、油圧シリンダのロッドの伸縮動作によりカバー体8を伸縮させるように構成することもできる。
【0113】
さらに、前記実施形態では、掘削体6を最も下降させた状態において、短縮姿勢とされたカバー体8の下端部が地面に接触する長さ寸法に設定されているが、カバー体8の長さ寸法は、必ずしも地面に接触するように設定する必要はなく、少なくともカバー体8と地面との間を通して土砂が周囲に飛散されない範囲で調整することができる。
【図面の簡単な説明】
【0114】
【図1】本発明の実施形態に係る掘削機を示す側面図である。
【図2】図1の掘削機の正面図である。
【図3】図1の駆動装置の一部を省略して示す正面断面図である。
【図4】図3のIV−IV線断面図である。
【図5】図3の異物検出手段を拡大して示す正面断面図である。
【図6】図5の異物検出手段を解除状態とした正面断面図である。
【図7】(a)は、図5の異物検出手段の検出板がカバー体の外側へ揺動した状態を示す正面断面図であり、(b)は(a)の一部を拡大して示す図である。
【図8】図1の掘削機の電気的構成を示すブロック図である。
【図9】本発明の別の実施形態に係る掘削機を示す図4相当図である。
【図10】(a)は、図9の掻き取り部材を拡大して示す左側面図であり、(b)は、(a)の挟持部材を分解して示す斜視図である。
【符号の説明】
【0115】
D1 ストローク(昇降駆動部の昇降範囲に対応する距離)
D2 異物許容寸法(予め設定された大きさ)
J1 水平軸
J2 軸(第二規制手段)
U 異物
1 掘削機
2 ベースマシン
5 リーダ
6 掘削体
7 昇降シリンダ(昇降駆動部)
8 カバー体
15 モータ(駆動部)
17 掘削チェーン(無端状体)
19 上側掘削フレーム(掘削フレーム)
20 中間掘削フレーム(掘削フレーム)
21 下側掘削フレーム(掘削フレーム)
23 カッタービット(掘削刃)
24 基部カバー
25 第一延長カバー(延長カバー)
26 第二延長カバー(延長カバー)
27 伸縮駆動手段(伸縮駆動部)
40 異物検出手段
47 検出板
48 規制ブロック(規制手段)
49 規制レバー(第二規制手段)
50 リミットスイッチ(揺動位置検出手段)
55 ブラケット(第二規制手段)
56 規制ピン(第二規制手段)
58 ロッド検出センサ(検出手段)
60 コントローラ(制御手段)
66 掻き取り部材
【特許請求の範囲】
【請求項1】
上下方向に延びる掘削フレームとこの掘削フレームの上下に配された回転体の間に掛け渡された掘削刃を有する無端状体とこの無端状体を循環駆動させる駆動部とを有するとともにベースマシンに対して少なくとも昇降自在に装着された掘削体を備え、前記掘削体を下降させて掘削フレームを地中に挿入するとともに前記無端状体を前記駆動部によって循環駆動させることにより地中の土砂を掘削する掘削機であって、
前記掘削体に設けられ、前記無端状体を掘削フレームの軸線回りに取り囲むカバー体をさらに備え、
このカバー体は、前記掘削体に固定された基部カバーと、この基部カバーの内側又は外側の領域を通って当該基部カバーに対し前記軸線方向に相対変位自在に装着された延長カバーとを有し、
前記カバー体は、前記基部カバーに対する前記延長カバーの相対移動により、前記掘削体がベースマシンに対し最も上昇した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む延長姿勢と、前記掘削体がベースマシンに対し最も下降した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む短縮姿勢とに切換可能となるように伸縮することを特徴とする掘削機。
【請求項2】
前記掘削体を前記ベースマシンに対し昇降させる昇降駆動部と、前記カバー体を前記延長姿勢と短縮姿勢との間で伸縮させる伸縮駆動部とをさらに備えたことを特徴とする請求項1に記載の掘削機。
【請求項3】
前記昇降駆動部による掘削体の昇降位置を検出する検出手段と、この検出手段により検出された前記昇降位置に基づいて、前記カバー体が、地表から露出した前記無端状体を取り囲むことができる長さとなるように前記伸縮駆動部の駆動を制御する制御手段とをさらに備えていることを特徴とする請求項2に記載の掘削機。
【請求項4】
前記掘削体には、前記カバー体によって取り囲まれた範囲内で前記無端状体の掘削刃に臨むように掻き取り部材が固定されていることを特徴とする請求項1〜3の何れか1項に記載の掘削機。
【請求項5】
前記伸縮駆動部は、前記基部カバーの上端に取り付けられたウィンチと、このウィンチを回転駆動するモータと、前記ウィンチの回転駆動により巻上げ又は巻下げられるロープとを備え、前記ロープの巻き上げ又は巻下げ動作に応じて前記延長カバーを基部カバーに対し昇降させることにより前記カバー体を伸縮させることを特徴とする請求項2〜4の何れか1項に記載の掘削機。
【請求項6】
前記カバー体は、複数の延長カバーを有しており、各延長カバーは、これに隣接する延長カバーに対して相対移動可能に設けられていることを特徴とする請求項1〜5の何れか1項に記載の掘削機。
【請求項7】
前記カバー体の下端部には、当該カバー体に進入する前記無端状体の掘削刃に対し予め設定された大きさ以上の異物が付着しているか否かを検出する異物検出手段が設けられているとともに、この異物検出手段により前記大きさ以上の異物が検出された場合に、前記無端状体の循環駆動を停止させるように前記駆動部を制御する制御手段をさらに備えていることを特徴とする請求項1〜6の何れか1項に記載の掘削機。
【請求項8】
前記異物検出手段は、その上端部が前記カバー体の下端部に水平軸回りに揺動自在に支持された検出板と、この検出板をカバー体の内側へ揺動する方向へ付勢する付勢手段と、前記検出板の下端部が前記予め設定された大きさに対応する距離だけ前記掘削刃から離間した位置となるように当該検出板のカバー体の内側への揺動を規制する規制手段と、前記検出板がカバー体の外側に揺動したか否かを検出する揺動位置検出手段とを備え、前記検出板の下端部には、上方へ向かうに従いカバー体の内側へ傾斜する内側面が形成され、この内側面とカバー体の内側へ進入する掘削刃に付着した前記予め設定された大きさ以上の異物とが摺接することにより、前記検出板がカバー体の外側に揺動することを特徴とする請求項7に記載の掘削機。
【請求項9】
前記規制手段により規制された姿勢で前記検出板がカバー体の外側へ揺動するのを規制する第二規制手段をさらに備え、この第二規制手段は、検出板の揺動を規制する規制状態と当該揺動を許容する許容状態とに遷移自在に構成されていることを特徴とする請求項8に記載の掘削機。
【請求項1】
上下方向に延びる掘削フレームとこの掘削フレームの上下に配された回転体の間に掛け渡された掘削刃を有する無端状体とこの無端状体を循環駆動させる駆動部とを有するとともにベースマシンに対して少なくとも昇降自在に装着された掘削体を備え、前記掘削体を下降させて掘削フレームを地中に挿入するとともに前記無端状体を前記駆動部によって循環駆動させることにより地中の土砂を掘削する掘削機であって、
前記掘削体に設けられ、前記無端状体を掘削フレームの軸線回りに取り囲むカバー体をさらに備え、
このカバー体は、前記掘削体に固定された基部カバーと、この基部カバーの内側又は外側の領域を通って当該基部カバーに対し前記軸線方向に相対変位自在に装着された延長カバーとを有し、
前記カバー体は、前記基部カバーに対する前記延長カバーの相対移動により、前記掘削体がベースマシンに対し最も上昇した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む延長姿勢と、前記掘削体がベースマシンに対し最も下降した状態において地表から露出する前記無端状体を前記軸線回りに取り囲む短縮姿勢とに切換可能となるように伸縮することを特徴とする掘削機。
【請求項2】
前記掘削体を前記ベースマシンに対し昇降させる昇降駆動部と、前記カバー体を前記延長姿勢と短縮姿勢との間で伸縮させる伸縮駆動部とをさらに備えたことを特徴とする請求項1に記載の掘削機。
【請求項3】
前記昇降駆動部による掘削体の昇降位置を検出する検出手段と、この検出手段により検出された前記昇降位置に基づいて、前記カバー体が、地表から露出した前記無端状体を取り囲むことができる長さとなるように前記伸縮駆動部の駆動を制御する制御手段とをさらに備えていることを特徴とする請求項2に記載の掘削機。
【請求項4】
前記掘削体には、前記カバー体によって取り囲まれた範囲内で前記無端状体の掘削刃に臨むように掻き取り部材が固定されていることを特徴とする請求項1〜3の何れか1項に記載の掘削機。
【請求項5】
前記伸縮駆動部は、前記基部カバーの上端に取り付けられたウィンチと、このウィンチを回転駆動するモータと、前記ウィンチの回転駆動により巻上げ又は巻下げられるロープとを備え、前記ロープの巻き上げ又は巻下げ動作に応じて前記延長カバーを基部カバーに対し昇降させることにより前記カバー体を伸縮させることを特徴とする請求項2〜4の何れか1項に記載の掘削機。
【請求項6】
前記カバー体は、複数の延長カバーを有しており、各延長カバーは、これに隣接する延長カバーに対して相対移動可能に設けられていることを特徴とする請求項1〜5の何れか1項に記載の掘削機。
【請求項7】
前記カバー体の下端部には、当該カバー体に進入する前記無端状体の掘削刃に対し予め設定された大きさ以上の異物が付着しているか否かを検出する異物検出手段が設けられているとともに、この異物検出手段により前記大きさ以上の異物が検出された場合に、前記無端状体の循環駆動を停止させるように前記駆動部を制御する制御手段をさらに備えていることを特徴とする請求項1〜6の何れか1項に記載の掘削機。
【請求項8】
前記異物検出手段は、その上端部が前記カバー体の下端部に水平軸回りに揺動自在に支持された検出板と、この検出板をカバー体の内側へ揺動する方向へ付勢する付勢手段と、前記検出板の下端部が前記予め設定された大きさに対応する距離だけ前記掘削刃から離間した位置となるように当該検出板のカバー体の内側への揺動を規制する規制手段と、前記検出板がカバー体の外側に揺動したか否かを検出する揺動位置検出手段とを備え、前記検出板の下端部には、上方へ向かうに従いカバー体の内側へ傾斜する内側面が形成され、この内側面とカバー体の内側へ進入する掘削刃に付着した前記予め設定された大きさ以上の異物とが摺接することにより、前記検出板がカバー体の外側に揺動することを特徴とする請求項7に記載の掘削機。
【請求項9】
前記規制手段により規制された姿勢で前記検出板がカバー体の外側へ揺動するのを規制する第二規制手段をさらに備え、この第二規制手段は、検出板の揺動を規制する規制状態と当該揺動を許容する許容状態とに遷移自在に構成されていることを特徴とする請求項8に記載の掘削機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−177444(P2007−177444A)
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願番号】特願2005−375278(P2005−375278)
【出願日】平成17年12月27日(2005.12.27)
【出願人】(304020362)コベルコクレーン株式会社 (296)
【Fターム(参考)】
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願日】平成17年12月27日(2005.12.27)
【出願人】(304020362)コベルコクレーン株式会社 (296)
【Fターム(参考)】
[ Back to top ]