
掘削状態監視システム
【課題】電波減衰の大きな泥水やセメントミルク中であってもリアルタイム伝送を可能とし、さらにコストやユーザの電池交換の手間を削減した掘削状態監視システムを提供する。
【解決手段】掘削ヘッドにセンサ及び送信ノードを搭載し、ロッドに中継ノードを搭載することにより、送信ノードがセンサを用いて計測した例えばセメントミルク濃度の計測情報を無線パケット化し、地上の監視装置まで伝達させる。各ロッドの中継ノードにもセンサを搭載すれば、掘削ヘッドを移動せずに掘削孔内のセメントミルク濃度分布を知ることができる。振動センサを搭載すれば、作業を行わない時間帯での省電力化をすることができる。
【解決手段】掘削ヘッドにセンサ及び送信ノードを搭載し、ロッドに中継ノードを搭載することにより、送信ノードがセンサを用いて計測した例えばセメントミルク濃度の計測情報を無線パケット化し、地上の監視装置まで伝達させる。各ロッドの中継ノードにもセンサを搭載すれば、掘削ヘッドを移動せずに掘削孔内のセメントミルク濃度分布を知ることができる。振動センサを搭載すれば、作業を行わない時間帯での省電力化をすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、杭基礎施工において掘削状況や掘削孔に浸されているセメントミルク濃度をほぼリアルタイムで把握するために、掘削ヘッドやロッドに搭載したセンサにより取得した計測情報を、地上の監視装置まで伝送する掘削状態監視システムに関する。
【背景技術】
【0002】
杭基礎施工では杭を打ち込むための掘削孔(ボーリング孔)を地中深く掘るが、所望の掘削孔となっていることを確認する必要がある。また、掘削孔にセメントミルクを流し込んだ際、掘削孔内のセメントミルク濃度が適切であるかを確認する必要がある。
【0003】
そこで掘削ヘッドやロッドにセンサを搭載し、センサにより取得した計測情報を地上の監視装置まで伝送する方式として、有線方式および無線方式が用いられる。
有線方式は、計測情報を同軸ケーブル等の有線ケーブルを用いて、地上の監視装置まで伝送する方法である。有線方式は、センサの電源を地上部から供給できる長所があるものの、掘削作業中にロッドを縦列接続する度に有線ケーブルの継ぎ足し作業を行う必要があり、作業員には大きな労力となった。
【0004】
無線方式のうち、数十kHzの低周波周波数の磁界結合を利用した、いわゆる低周波磁界方式は、センサにより計測した計測情報を低周波磁界信号に変換した後、送信コイルを用いて地上まで伝送する方法である。地上では低周波磁界信号を受信コイルで検出し、計測情報を抽出した後に監視装置に通知する。現場に杭基礎施工用の大型発電機など大きな電波雑音源を発生する機器がある。この低周波磁界方式では低周波数磁界を用いるが、その機器からの輻射妨害電磁界により、計測情報を伝送する低周波磁界信号に干渉妨害が与えられ、計測データ伝送に多くの誤りが発生する。さらに、数十kHzの低周波周波数を利用するため、伝送できる信号伝送速度が低くなり、その結果伝送容量も小さい。これら輻射妨害電磁界および伝送容量の問題があるため、計測情報の信頼性の高いリアルタイム伝送をするうえで障害となっている。
【0005】
また数MHz以上の無線周波数を使用する無線方式では、計測情報を無線パケットに格納し地上の監視装置まで伝送するものである。具体的には、特定省電力無線や微弱無線などが用いられる。ただし、泥水中やセメントミルク中では電波減衰が大きいので、掘削ヘッドから監視装置まで直接伝送することは困難である。そこで特許文献1においては、複数台の中継ノードを用い、無線パケットをマルチホップさせることにより計測情報を監視装置まで伝送させる手段が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−314179号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1は、ロッドの上端と下端に中継ノードを設置し、上端の中継ノードと下端の中継ノードを有線ケーブルで接続することにより、ロッド下端の中継ノードで受信した計測情報を、有線ケーブルを介してロッド上端の中継ノードまで伝送し、さらにロッド上端の中継ノードは計測情報を再送信する伝送システムを開示している。特許文献1の伝送システムを用いれば、ロッドを縦列接続する際もロッドの継ぎ足し時に有線方式のような継ぎ足し作業を必要としない。
【0008】
しかしながら特許文献1の伝送システムは、ロッド1本にあたり2台の中継ノードが必要であるので、深く掘るほど中継ノードのコストがかかる問題がある。さらに、中継ノードは電池起動が前提となるため、中継ノードの台数分だけ電池交換の手間がかかる問題があった。
また中継ノードのホップ数(中継数)が多くなると、計測情報の伝送遅延も比例して大きくなる問題もあった。
【0009】
本発明の目的は前記した問題点を解決し、杭基礎施工において掘削状況や掘削孔に浸されているセメントミルク濃度をリアルタイムで把握するために無線方式を用いた掘削状態監視システムにおいて、無線信号の減衰が大きい泥水やセメントミルク中であっても、通信信頼性が高く、少ない遅延で計測情報を監視装置へ伝送すると共に、メインテナンスが容易で低廉な掘削状態監視システムを提供することにある。
【課題を解決するための手段】
【0010】
地上部のモータから縦列接続されるロッドを通じて最深部の掘削ヘッドに動力が伝えられることにより掘削孔を築造する杭基礎施工において、前記掘削ヘッドに掘削状況とセメントミルク濃度を把握するためのセンサと送信ノードを設置し、前記ロッドに中継ノードを設置し、地上部に受信ノードと監視装置を設置することにより、前記送信ノードがセンサを用いて計測した計測情報を含む無線パケットを、前記ロッドに搭載される前記中継ノードを介して地上の前記受信ノードまでマルチホップ伝達する計測情報の伝送方法とし、前記中継ノードは少なくともロッドの上端および下端にアンテナを配置し、下端に設置した下端アンテナ、もしくはロッド上端に設置した上端アンテナで受信した無線パケットを、再送信することで、掘削孔内の無線信号減衰の大きな泥水やセメントミルクであっても、無線信号伝送誤りが少なく通信信頼性が高く、かつ伝送遅延の小さい計測情報伝送と、ロッド内の中継装置を削減することにより、メインテナンスが容易で低廉な掘削状態監視システムとする。
【発明の効果】
【0011】
本発明によれば、電池交換の手間を低減することができる。さらに、中継数が多い場合でも計測情報の伝送遅延を低減することができるという効果がある。
【図面の簡単な説明】
【0012】
【図1】実施例1における掘削状態情報伝送システムのブロック図である。
【図2】実施例1における中継ノード2のブロック図である。
【図3】実施例2における中継ノード2のブロック図である。
【図4】実施例3における中継ノード2の動作フロー図である。
【発明を実施するための形態】
【0013】
以下、実施例について図面を用いて説明する。
【実施例1】
【0014】
<図1の説明>
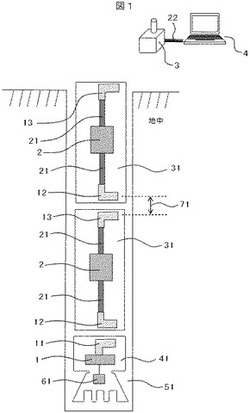
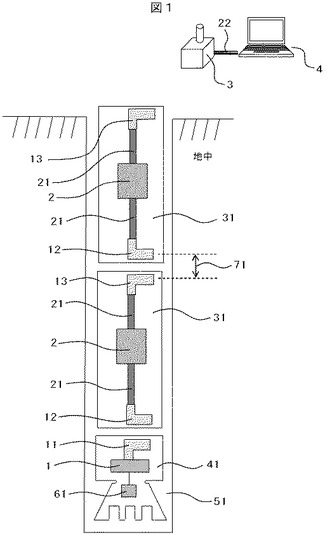
図1は、実施例1における掘削状態情報伝送システムのブロック図であり、掘削ヘッド41と、ロッド31と、送信ノード1と、中継ノード2と、受信ノード3と、監視装置4と、センサ61を備えている。
【0015】
<掘削ヘッド>
掘削ヘッド41は杭穴を掘削するためのものであり、地上部のモータからロッド31を通じて掘削ヘッド41まで動力が伝送される。ただし、図1は地上部のモータの記載を省略した。掘削ヘッド41はモータから伝達される動力により回転することにより、所定の深さまで掘削することが可能である。掘削後、掘削ヘッド41によって掘られた掘削孔51に杭を打ち込み、さらにセメントミルクを流し込む。
【0016】
<ロッド>
ロッド31は、地上部のモータの動力を掘削ヘッド41に伝送するものである。ロッド31の長さは10m程度であるから、掘削を進めていくごとにロッド31を縦列接続していく必要がある。図1は、ロッド31を2段縦列している例である。
【0017】
<送信ノード>
送信ノード1は、センサ61を用いて予め決められた周期で掘削状況やセメントミルク濃度の計測処理を行う。さらに、送信ノード1は、予め決められた周期で計測処理により得られたデータを無線パケットとしてアンテナ12から送信する。
<センサ>
センサ61は掘削状況やセメントミルクノードを計測するために用いられ、送信ノード1と接続されている。
【0018】
<アンテナ>
アンテナ11は送信ノード1と接続されていて、無線パケットを中継ノード2の下端アンテナ12に向けて送信する。従って、アンテナ11の指向性は中継ノード2の下端に設けられたアンテナ12の方向となる。
また掘削孔51内は泥水やセメントミルクに浸されるので電波減衰度が大きく、無線パケットの伝達距離は数十センチ程度となる。従って、ロッド31の長さに比べて無線パケットの伝達距離は十分に短いために、アンテナ12から送信した無線パケットは中継ノード2の下端アンテナ12では受信可能であるが、上端アンテナ13で受信することは困難である。
【0019】
<中継ノード>
送信ノード1のアンテナ12から送信された計測情報を含む無線パケットは、ロッド31の下端アンテナ12で受信される。アンテナ12で受信されたパケットは中継ノード2まで伝達され、中継ノード2により上端アンテナ13を介して再送信される。
以下、中継ノード2の構成の詳細について記す。
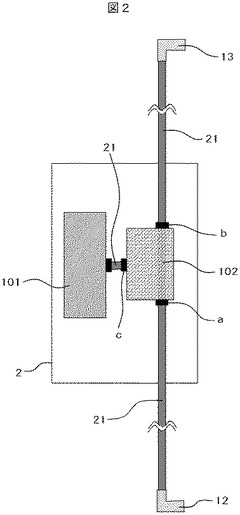
図2は、実施例1における中継ノード2のブロック図である。中継ノード2は、無線モジュール101、合成分配器102、下端アンテナ12、上端アンテナ13と同軸ケーブル21から構成される。
【0020】
<無線モジュール>
無線モジュール101は、送信ノード11や他中継ノード2が送信した計測情報を含む無線パケットを受信した後、他の中継ノード11や受信ノード3に再送信する機能を有する。
【0021】
<下端アンテナ>
下端アンテナ12はロッド31の下端に取り付けられるアンテナであり、アンテナ11から送信される無線パケットや、縦列接続されるロッド31の1段下のロッド31に搭載される中継ノード2の上端アンテナ13から送信される無線パケットを受信するために用いる。従って、下端アンテナ12の指向性はアンテナ11や、縦列接続されるロッド31の1段下のロッド31に搭載される中継ノード2の上端アンテナ13の方向となる。
【0022】
<上端アンテナ>
上端アンテナ13は、ロッド31の上端に取り付けられるアンテナであり、縦列接続されるロッド31の1段上のロッド31に搭載される中継ノード2の下端アンテナ12や、受信ノード3のアンテナに向けて無線パケットを送信する。従って、上端アンテナ13の指向性は、縦列接続されるロッド31の1段上のロッド31に搭載される中継ノード2の下端アンテナ12や、受信ノード3の方向となる。
既述したとおり掘削孔51内は泥水やセメントミルクに浸されるので電波減衰度が大きく、無線パケットの伝達距離は数十センチ程度となる。従って、ロッド31の長さに比べて無線パケットの伝達距離は十分に短いために、上端アンテナ13から送信した無線パケットは1段上のロッド31の下端アンテナ12では受信可能であるが、上端アンテナ13で受信することは困難である。
【0023】
<合成分配器>
合成分配器102は、コネクタaとコネクタbとコネクタcの3箇所の接続口を有し、コネクタaとコネクタbから入力される信号を、合成した後にコネクタcから出力し、逆にコネクタcから入力される信号を、コネクタaとコネクタbから分配出力する機能を有する。
また合成分配器102のコネクタaは下端アンテナ12に、コネクタbは上端アンテナ13に、コネクタcは無線モジュール101に接続される。ただし、合成分配器102と下端アンテナ12は、直接接続される必要は無く、ロッド2の長さに応じて同軸ケーブル21を介して接続する。合成分配器102と上端アンテナ13、合成分配器102と無線モジュール101についても同様に同軸ケーブル21を介して接続される。
合成分配器102はコネクタaとコネクタbから入力される信号を合成した後、コネクタcから出力される機能を有するので、例えばコネクタaとコネクタbから逆位相の電波が入力された場合、電波を弱め合ってしまう。
【0024】
しかしながら、既述したとおり掘削孔51内は泥水やセメントミルクに浸されるので電波減衰度が大きく、無線パケットの伝達距離は数十センチ程度となる。伝達距離に対してロッド31の長さは十分に長いために、下端アンテナ12で受信した無線パケットを上端アンテナ13で受信することは困難であり、逆に上端アンテナ13で受信した無線パケットを下端アンテナで受信することは困難である。従って、コネクタaとコネクタbで同時に同じ電波が入力されることは無いので、問題はない。
以上により、送信ノード1や他中継ノード2が送信した計測情報を含む無線パケットを下端アンテナ12が受信した際は、合成分配器102を介して無線モジュール101まで伝送される。計測情報を受信した無線モジュール101は、合成分配器102を介して計測情報を他の中継ノード101に伝送する。
【0025】
<受信ノード>
受信ノード3は、中継ノード2が送信した計測情報を含む無線パケットを受信した際、監視装置4に通知する機能を有する。ここで、受信ノード3と監視装置4は、LANケーブル22等による有線通信路、もしくは無線通信路により接続される。
ただし、掘削ヘッドが地表近くにありロッド31を使用していない場合は、堀削ヘッド41のアンテナ12から送信された無線パケットは、中継ノード2を介すことなく、受信ノード3で受信される。
【0026】
<監視装置>
監視装置4は、受信ノード3により通知された計測情報を作業者が見やすいように、グラフや数値で表示するものである。作業者は、監視装置4の画面を見ることにより、地中内部の掘削ヘッド41の状態や、掘削孔51のセメントミルク濃度を把握することが可能である。
【0027】
<一連の動作>
次に具体例1の一連の動作を記す。送信ノード1は、予め決められた周期でセンサを用いて計測処理を行う。計測した情報は無線パケットとして、アンテナ11から送信される。ここで、使用する無線方式として、微弱無線や特定省電力等どのような方式を用いても構わないが、泥水やセメントミルク中の電波減衰は空気中と比べて大きいので、周波数が低い方が望ましい。
アンテナ11から送信された無線パケットは、中継ノード2の下端アンテナ12で受信される。既述のとおり、泥水やセメントミルク中の電波減衰は空気中と比べて大きいので、可能な限り、中継ノード2の下端アンテナ12は掘削ヘッド41のアンテナ11に接近することが望ましい。
中継ノード2の下端アンテナ12で受信された無線パケットは、合成分配器102を介して無線モジュール101まで伝達される。
【0028】
無線モジュール101では受信したパケットから計測情報を読み込んだ後、新たに無線パケットに計測情報を記載した後、送信処理を行う。既述したとおり、無線モジュール101から送信される無線パケットは、下端アンテナ12と上端アンテナ13の両端アンテナから送信さるが、下端アンテナ12から送信される無線パケットを上端アンテナ13は受信しない。一方、上端アンテナ13から送信される無線パケットは、一段上段のロッド31に搭載されている中継ノード2の下端アンテナ12により受信される。
以上の動作を繰り返すことにより、数段のロッドを縦列接続することにより、送信ノード1が送信した無線パケットを地上まで送信することが可能である。
【0029】
地上では受信ノード3が無線パケットを受信した際に計測データを抽出し、監視装置4に通知する。受信ノード3と監視装置4は、LANケーブルやその他の無線/有線ケーブルより接続される。
監視装置4は、受信ノードから通知を受けた計測情報を作業員の把握しやすいように、数値化やグラフ化したのち、監視装置上の画面に表示する。もしくは、図1には図示していないが、監視装置4が直接、掘削ヘッド41の動力源である地上部の電動機や動作電源を生成する発電機を制御しても構わない。
【0030】
<アンテナの補足>
掘削中は掘削ヘッド41の摩擦を減らすために、掘削孔51は泥水で浸される。さらに掘削後は、セメントミルクに浸される。泥水やセメントミルクは、空気と比べて電気導電率が高く電波減衰度が大きいために、無線パケットの伝達距離は数十センチ程度である。
従って、送信ノード1のアンテナ11と中継ノード2の下端アンテナ12は、可能な限り接近させることが望ましい。同様に、中継ノード2の上端アンテナ13と他の中継ノード2の下端アンテナ12や、中継ノード2の上端アンテナ13と受信ノード3のアンテナも、可能な限り接近させることが望ましい。
また、アンテナ12、下端アンテナ12、上端アンテナ13は、泥水やセメントミルク中で使用するので防水加工が必要であり、さらに掘削時に岩盤等の接触により破損しないように、強固な筐体にすることが望ましい。
【0031】
<ケーブルの補足>
ロッド31は10m程度あるで、ロッド31の中央に中継モジュール2を設置した場合、下端アンテナ12と上端アンテナ13は有線ケーブル21を用いて接続する必要がある。有線ケーブル21は同軸ケーブルなど低損失ケーブルを用いることが望ましい。また、掘削中に岩石等の接触により有線ケーブル21の破損を防止するために、保護導管内に収めることが望ましい。
【0032】
<実施例1の補足>
実施例1では、送信ノードから複数台の中継ノード2によってマルチホップした後、地上の受信ノード3まで伝達するシステムの具体例を記したが、監視装置4から中継ノード2や送信ノード1の状態を制御する際は、実施例1と逆の動作をさせれば良い。
また実施例1では、送信ノード1のみセンサ61と接続されていて定期的に計測処理を実施したが、中継ノード2にもセンサが接続され、定期的に計測処理を実施しても構わない。
以上説明した実施例ではロッド31の1個当たり、中継ノードを1個としているため、コスト、中継による伝送遅延、作業者が電池を交換する手間を低減することができる。
【実施例2】
【0033】
実施例1では、送信ノード1から送信した計測情報を含む無線パケットを複数台の中継ノード2を介して地上の受信ノード3まで伝送するシステムについて記した。実施例2では、送信ノード1だけではなく中継ノード2にもセンサ301を接続する例について記す。送信ノード1だけではなく中継ノード2にもセンサ301が接続されるので、より詳細に掘削状況やセメントミルク濃度を把握することが可能となる一例を以下に説明する。
【0034】
<図3の説明>
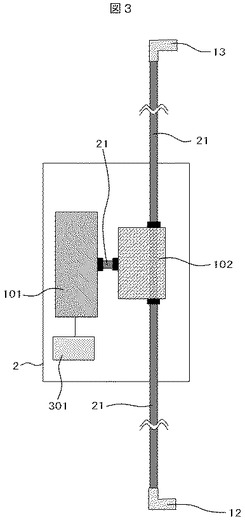
図3は、実施例2における中継ノード2のブロック図である。ただし、合成分配器102と、下段アンテナ12と、上段アンテナ13と、有線ケーブル21は図2と同様の機能を有するので説明を省略する。センサ301は無線モジュール101に接続されている。
【0035】
<無線モジュールの機能>
無線モジュール101は、計測情報を含む無線パケットを中継する機能を有するとともに、予め決められた周期でセンサ301を用いて計測処理を行い、計測結果を無線パケットとして受信ノード3を送信先として送信する。その際、具体例1と同様に、中継ノード2と受信ノード3が直接、無線パケットの送受信を行う必要は無く、複数の中継ノード2を介して、無線パケットのやり取りが出来ればよい。
【0036】
<効果>
実施例2の効果の一例として、送信ノード11と接続されるセンサ61と、中継ノード2に接続されるセンサ301にセメントミルク濃度計測用センサを用いた場合について記す。
実施例1では、セメントミルクの濃度を計測する際、掘削ヘッド41にのみセメントミルク濃度計測用センサが接続されているので、掘削孔51内のセメントミルク濃度分布を把握するためには、送信ノード1を掘削孔51内において上下に動かしながらセメントミルク濃度を計測する必要がある。一方、実施例2では中継ノード2にもセメントミルク計測用センサが接続されているので、掘削ヘッド41を上下することなく、掘削孔51内におけるセメントミルク中の濃度分布を計測することが可能となる。
【実施例3】
【0037】
実施例2では、送信ノード1だけではなく中継ノード2にもセンサを接続することにより、送信ノード1にのみセンサを接続した場合に比べて、より詳細に掘削孔51のセメントミルク中の濃度分布を計測することが可能であることを述べた。
実施例3では、基礎施工作業中は常時振動が発生することを利用し、送信ノード1に接続されるセンサ61と中継ノード2に接続されるセンサ301として、振動検出センサを用いることによる省電力化について記す。
【0038】
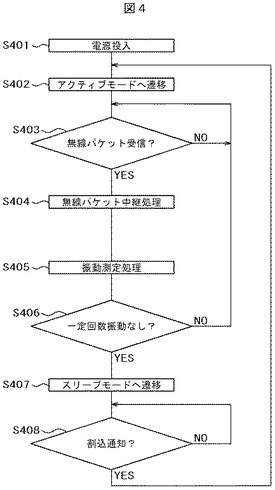
<図4の説明>
図4は、実施例3における中継ノード2の動作フロー図である。以下、図4を用いて実施例3を説明する。
<中継ノードの一連の動作>
ステップS401で掘削状態情報伝送システムに電源投入された際、ステップS402で中継ノード2はアクティブモードに遷移する。ここで記すアクティブモードとは、無線モジュール101の全ての機能が動作可能な状態であり、送信ノード1や他の中継ノード2が送信した無線パケットを受信した場合、再送信する機能と、予め決められた周期で振動検出センサ301を用いて振動が発生しているか検知することにより、掘削中かどうかを判定する機能を有す。
【0039】
ステップS403で無線モジュール101が送信ノード1や他の中継ノード2から送信された無線パケットを受信した場合には(図中のYES)、ステップS404で無線モジュール101は、他の中継ノード2や受信ノード2に向けて無線パケットを再送信する。
また、ステップS405で無線モジュール101は、アクティブモードにおいて予め決められた周期で、振動検出センサ301を用いて振動検出処理を行う。ステップS403で無線パケットを受信しない場合には(図中のNO)、ステップS403での処理を繰り返す。
また、ステップS406において監視装置4は、ステップS405における振動検出処理による振動の検出結果を判定する。一定時間の間振動を検知できない場合には(図中のYES)、監視装置4は基礎施工作業が行われていないと判定し、ステップS407で中継ノード2をスリープモードに遷移させる。振動を検知した場合には(図中のNO)、ステップS403に戻り、処理を繰り返す。
【0040】
ここで言うスリープモードとは、無線モジュールの割り込み検出機能のみ動作させることにより、電池の消耗を抑えるモードである。
ステップS408で振動センサ301は振動検出処理を行い、振動が検出された場合には無線モジュール101に割り込み通知する。基礎施工作業が再開されたために、振動を検出し無線モジュール101に割り込み通知した場合には(図中のYES)、ステップS402に戻り、中継ノード2は再びアクティブモードに遷移する。振動を検出しない場合には(図中のNO)、ステップS408の判定を繰り返す。
上記は中継ノード2の一連の動作を説明したが、送信ノード1も同様の動作をするので説明を省略する。
【0041】
<効果>
既述したとおり送信ノード1や中継ノード2は電池起動されることが前提となるので、杭基礎施工作業を行わない時間帯(例えば夜間)は電池の消耗を抑える必要がある。実施例3では、基礎施工作業中は常時振動が発生することを利用し、送信ノード1に接続されるセンサ61と中継ノード2に接続されるセンサ301として、振動検出センサを用い基礎施工作業中かを判定し、掘削を行っていないときにスリープモードに遷移することにより省電力化する効果がある。
【0042】
ただし上記では、センサ61とセンサ301は振動検出センサを用いたが、杭基礎施工作業中における掘削ヘッド41やロッド31の振動が検出できるものであれば、振動センサ以外、例えば加速度センサなどのセンサを用いても構わない。
以上述べた実施形態は、本発明を限定するものではない。各実施形態に対して構成要素の変更や追加を行った実施形態を考えることができるが、いずれも本発明の範疇にある。
【符号の説明】
【0043】
1:送信ノード、2:中継ノード、3:受信ノード、4:監視装置、11:送信ノードのアンテナ、12:中継ノードの下端アンテナ、13:中継ノードの上端アンテナ、21:有線ケーブル、31:ロッド、41:掘削ヘッド、51:掘削孔、61:センサ、71:無線通信距離、101:無線モジュール、102:合成分配器、301:センサ。
【技術分野】
【0001】
本発明は、杭基礎施工において掘削状況や掘削孔に浸されているセメントミルク濃度をほぼリアルタイムで把握するために、掘削ヘッドやロッドに搭載したセンサにより取得した計測情報を、地上の監視装置まで伝送する掘削状態監視システムに関する。
【背景技術】
【0002】
杭基礎施工では杭を打ち込むための掘削孔(ボーリング孔)を地中深く掘るが、所望の掘削孔となっていることを確認する必要がある。また、掘削孔にセメントミルクを流し込んだ際、掘削孔内のセメントミルク濃度が適切であるかを確認する必要がある。
【0003】
そこで掘削ヘッドやロッドにセンサを搭載し、センサにより取得した計測情報を地上の監視装置まで伝送する方式として、有線方式および無線方式が用いられる。
有線方式は、計測情報を同軸ケーブル等の有線ケーブルを用いて、地上の監視装置まで伝送する方法である。有線方式は、センサの電源を地上部から供給できる長所があるものの、掘削作業中にロッドを縦列接続する度に有線ケーブルの継ぎ足し作業を行う必要があり、作業員には大きな労力となった。
【0004】
無線方式のうち、数十kHzの低周波周波数の磁界結合を利用した、いわゆる低周波磁界方式は、センサにより計測した計測情報を低周波磁界信号に変換した後、送信コイルを用いて地上まで伝送する方法である。地上では低周波磁界信号を受信コイルで検出し、計測情報を抽出した後に監視装置に通知する。現場に杭基礎施工用の大型発電機など大きな電波雑音源を発生する機器がある。この低周波磁界方式では低周波数磁界を用いるが、その機器からの輻射妨害電磁界により、計測情報を伝送する低周波磁界信号に干渉妨害が与えられ、計測データ伝送に多くの誤りが発生する。さらに、数十kHzの低周波周波数を利用するため、伝送できる信号伝送速度が低くなり、その結果伝送容量も小さい。これら輻射妨害電磁界および伝送容量の問題があるため、計測情報の信頼性の高いリアルタイム伝送をするうえで障害となっている。
【0005】
また数MHz以上の無線周波数を使用する無線方式では、計測情報を無線パケットに格納し地上の監視装置まで伝送するものである。具体的には、特定省電力無線や微弱無線などが用いられる。ただし、泥水中やセメントミルク中では電波減衰が大きいので、掘削ヘッドから監視装置まで直接伝送することは困難である。そこで特許文献1においては、複数台の中継ノードを用い、無線パケットをマルチホップさせることにより計測情報を監視装置まで伝送させる手段が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−314179号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1は、ロッドの上端と下端に中継ノードを設置し、上端の中継ノードと下端の中継ノードを有線ケーブルで接続することにより、ロッド下端の中継ノードで受信した計測情報を、有線ケーブルを介してロッド上端の中継ノードまで伝送し、さらにロッド上端の中継ノードは計測情報を再送信する伝送システムを開示している。特許文献1の伝送システムを用いれば、ロッドを縦列接続する際もロッドの継ぎ足し時に有線方式のような継ぎ足し作業を必要としない。
【0008】
しかしながら特許文献1の伝送システムは、ロッド1本にあたり2台の中継ノードが必要であるので、深く掘るほど中継ノードのコストがかかる問題がある。さらに、中継ノードは電池起動が前提となるため、中継ノードの台数分だけ電池交換の手間がかかる問題があった。
また中継ノードのホップ数(中継数)が多くなると、計測情報の伝送遅延も比例して大きくなる問題もあった。
【0009】
本発明の目的は前記した問題点を解決し、杭基礎施工において掘削状況や掘削孔に浸されているセメントミルク濃度をリアルタイムで把握するために無線方式を用いた掘削状態監視システムにおいて、無線信号の減衰が大きい泥水やセメントミルク中であっても、通信信頼性が高く、少ない遅延で計測情報を監視装置へ伝送すると共に、メインテナンスが容易で低廉な掘削状態監視システムを提供することにある。
【課題を解決するための手段】
【0010】
地上部のモータから縦列接続されるロッドを通じて最深部の掘削ヘッドに動力が伝えられることにより掘削孔を築造する杭基礎施工において、前記掘削ヘッドに掘削状況とセメントミルク濃度を把握するためのセンサと送信ノードを設置し、前記ロッドに中継ノードを設置し、地上部に受信ノードと監視装置を設置することにより、前記送信ノードがセンサを用いて計測した計測情報を含む無線パケットを、前記ロッドに搭載される前記中継ノードを介して地上の前記受信ノードまでマルチホップ伝達する計測情報の伝送方法とし、前記中継ノードは少なくともロッドの上端および下端にアンテナを配置し、下端に設置した下端アンテナ、もしくはロッド上端に設置した上端アンテナで受信した無線パケットを、再送信することで、掘削孔内の無線信号減衰の大きな泥水やセメントミルクであっても、無線信号伝送誤りが少なく通信信頼性が高く、かつ伝送遅延の小さい計測情報伝送と、ロッド内の中継装置を削減することにより、メインテナンスが容易で低廉な掘削状態監視システムとする。
【発明の効果】
【0011】
本発明によれば、電池交換の手間を低減することができる。さらに、中継数が多い場合でも計測情報の伝送遅延を低減することができるという効果がある。
【図面の簡単な説明】
【0012】
【図1】実施例1における掘削状態情報伝送システムのブロック図である。
【図2】実施例1における中継ノード2のブロック図である。
【図3】実施例2における中継ノード2のブロック図である。
【図4】実施例3における中継ノード2の動作フロー図である。
【発明を実施するための形態】
【0013】
以下、実施例について図面を用いて説明する。
【実施例1】
【0014】
<図1の説明>
図1は、実施例1における掘削状態情報伝送システムのブロック図であり、掘削ヘッド41と、ロッド31と、送信ノード1と、中継ノード2と、受信ノード3と、監視装置4と、センサ61を備えている。
【0015】
<掘削ヘッド>
掘削ヘッド41は杭穴を掘削するためのものであり、地上部のモータからロッド31を通じて掘削ヘッド41まで動力が伝送される。ただし、図1は地上部のモータの記載を省略した。掘削ヘッド41はモータから伝達される動力により回転することにより、所定の深さまで掘削することが可能である。掘削後、掘削ヘッド41によって掘られた掘削孔51に杭を打ち込み、さらにセメントミルクを流し込む。
【0016】
<ロッド>
ロッド31は、地上部のモータの動力を掘削ヘッド41に伝送するものである。ロッド31の長さは10m程度であるから、掘削を進めていくごとにロッド31を縦列接続していく必要がある。図1は、ロッド31を2段縦列している例である。
【0017】
<送信ノード>
送信ノード1は、センサ61を用いて予め決められた周期で掘削状況やセメントミルク濃度の計測処理を行う。さらに、送信ノード1は、予め決められた周期で計測処理により得られたデータを無線パケットとしてアンテナ12から送信する。
<センサ>
センサ61は掘削状況やセメントミルクノードを計測するために用いられ、送信ノード1と接続されている。
【0018】
<アンテナ>
アンテナ11は送信ノード1と接続されていて、無線パケットを中継ノード2の下端アンテナ12に向けて送信する。従って、アンテナ11の指向性は中継ノード2の下端に設けられたアンテナ12の方向となる。
また掘削孔51内は泥水やセメントミルクに浸されるので電波減衰度が大きく、無線パケットの伝達距離は数十センチ程度となる。従って、ロッド31の長さに比べて無線パケットの伝達距離は十分に短いために、アンテナ12から送信した無線パケットは中継ノード2の下端アンテナ12では受信可能であるが、上端アンテナ13で受信することは困難である。
【0019】
<中継ノード>
送信ノード1のアンテナ12から送信された計測情報を含む無線パケットは、ロッド31の下端アンテナ12で受信される。アンテナ12で受信されたパケットは中継ノード2まで伝達され、中継ノード2により上端アンテナ13を介して再送信される。
以下、中継ノード2の構成の詳細について記す。
図2は、実施例1における中継ノード2のブロック図である。中継ノード2は、無線モジュール101、合成分配器102、下端アンテナ12、上端アンテナ13と同軸ケーブル21から構成される。
【0020】
<無線モジュール>
無線モジュール101は、送信ノード11や他中継ノード2が送信した計測情報を含む無線パケットを受信した後、他の中継ノード11や受信ノード3に再送信する機能を有する。
【0021】
<下端アンテナ>
下端アンテナ12はロッド31の下端に取り付けられるアンテナであり、アンテナ11から送信される無線パケットや、縦列接続されるロッド31の1段下のロッド31に搭載される中継ノード2の上端アンテナ13から送信される無線パケットを受信するために用いる。従って、下端アンテナ12の指向性はアンテナ11や、縦列接続されるロッド31の1段下のロッド31に搭載される中継ノード2の上端アンテナ13の方向となる。
【0022】
<上端アンテナ>
上端アンテナ13は、ロッド31の上端に取り付けられるアンテナであり、縦列接続されるロッド31の1段上のロッド31に搭載される中継ノード2の下端アンテナ12や、受信ノード3のアンテナに向けて無線パケットを送信する。従って、上端アンテナ13の指向性は、縦列接続されるロッド31の1段上のロッド31に搭載される中継ノード2の下端アンテナ12や、受信ノード3の方向となる。
既述したとおり掘削孔51内は泥水やセメントミルクに浸されるので電波減衰度が大きく、無線パケットの伝達距離は数十センチ程度となる。従って、ロッド31の長さに比べて無線パケットの伝達距離は十分に短いために、上端アンテナ13から送信した無線パケットは1段上のロッド31の下端アンテナ12では受信可能であるが、上端アンテナ13で受信することは困難である。
【0023】
<合成分配器>
合成分配器102は、コネクタaとコネクタbとコネクタcの3箇所の接続口を有し、コネクタaとコネクタbから入力される信号を、合成した後にコネクタcから出力し、逆にコネクタcから入力される信号を、コネクタaとコネクタbから分配出力する機能を有する。
また合成分配器102のコネクタaは下端アンテナ12に、コネクタbは上端アンテナ13に、コネクタcは無線モジュール101に接続される。ただし、合成分配器102と下端アンテナ12は、直接接続される必要は無く、ロッド2の長さに応じて同軸ケーブル21を介して接続する。合成分配器102と上端アンテナ13、合成分配器102と無線モジュール101についても同様に同軸ケーブル21を介して接続される。
合成分配器102はコネクタaとコネクタbから入力される信号を合成した後、コネクタcから出力される機能を有するので、例えばコネクタaとコネクタbから逆位相の電波が入力された場合、電波を弱め合ってしまう。
【0024】
しかしながら、既述したとおり掘削孔51内は泥水やセメントミルクに浸されるので電波減衰度が大きく、無線パケットの伝達距離は数十センチ程度となる。伝達距離に対してロッド31の長さは十分に長いために、下端アンテナ12で受信した無線パケットを上端アンテナ13で受信することは困難であり、逆に上端アンテナ13で受信した無線パケットを下端アンテナで受信することは困難である。従って、コネクタaとコネクタbで同時に同じ電波が入力されることは無いので、問題はない。
以上により、送信ノード1や他中継ノード2が送信した計測情報を含む無線パケットを下端アンテナ12が受信した際は、合成分配器102を介して無線モジュール101まで伝送される。計測情報を受信した無線モジュール101は、合成分配器102を介して計測情報を他の中継ノード101に伝送する。
【0025】
<受信ノード>
受信ノード3は、中継ノード2が送信した計測情報を含む無線パケットを受信した際、監視装置4に通知する機能を有する。ここで、受信ノード3と監視装置4は、LANケーブル22等による有線通信路、もしくは無線通信路により接続される。
ただし、掘削ヘッドが地表近くにありロッド31を使用していない場合は、堀削ヘッド41のアンテナ12から送信された無線パケットは、中継ノード2を介すことなく、受信ノード3で受信される。
【0026】
<監視装置>
監視装置4は、受信ノード3により通知された計測情報を作業者が見やすいように、グラフや数値で表示するものである。作業者は、監視装置4の画面を見ることにより、地中内部の掘削ヘッド41の状態や、掘削孔51のセメントミルク濃度を把握することが可能である。
【0027】
<一連の動作>
次に具体例1の一連の動作を記す。送信ノード1は、予め決められた周期でセンサを用いて計測処理を行う。計測した情報は無線パケットとして、アンテナ11から送信される。ここで、使用する無線方式として、微弱無線や特定省電力等どのような方式を用いても構わないが、泥水やセメントミルク中の電波減衰は空気中と比べて大きいので、周波数が低い方が望ましい。
アンテナ11から送信された無線パケットは、中継ノード2の下端アンテナ12で受信される。既述のとおり、泥水やセメントミルク中の電波減衰は空気中と比べて大きいので、可能な限り、中継ノード2の下端アンテナ12は掘削ヘッド41のアンテナ11に接近することが望ましい。
中継ノード2の下端アンテナ12で受信された無線パケットは、合成分配器102を介して無線モジュール101まで伝達される。
【0028】
無線モジュール101では受信したパケットから計測情報を読み込んだ後、新たに無線パケットに計測情報を記載した後、送信処理を行う。既述したとおり、無線モジュール101から送信される無線パケットは、下端アンテナ12と上端アンテナ13の両端アンテナから送信さるが、下端アンテナ12から送信される無線パケットを上端アンテナ13は受信しない。一方、上端アンテナ13から送信される無線パケットは、一段上段のロッド31に搭載されている中継ノード2の下端アンテナ12により受信される。
以上の動作を繰り返すことにより、数段のロッドを縦列接続することにより、送信ノード1が送信した無線パケットを地上まで送信することが可能である。
【0029】
地上では受信ノード3が無線パケットを受信した際に計測データを抽出し、監視装置4に通知する。受信ノード3と監視装置4は、LANケーブルやその他の無線/有線ケーブルより接続される。
監視装置4は、受信ノードから通知を受けた計測情報を作業員の把握しやすいように、数値化やグラフ化したのち、監視装置上の画面に表示する。もしくは、図1には図示していないが、監視装置4が直接、掘削ヘッド41の動力源である地上部の電動機や動作電源を生成する発電機を制御しても構わない。
【0030】
<アンテナの補足>
掘削中は掘削ヘッド41の摩擦を減らすために、掘削孔51は泥水で浸される。さらに掘削後は、セメントミルクに浸される。泥水やセメントミルクは、空気と比べて電気導電率が高く電波減衰度が大きいために、無線パケットの伝達距離は数十センチ程度である。
従って、送信ノード1のアンテナ11と中継ノード2の下端アンテナ12は、可能な限り接近させることが望ましい。同様に、中継ノード2の上端アンテナ13と他の中継ノード2の下端アンテナ12や、中継ノード2の上端アンテナ13と受信ノード3のアンテナも、可能な限り接近させることが望ましい。
また、アンテナ12、下端アンテナ12、上端アンテナ13は、泥水やセメントミルク中で使用するので防水加工が必要であり、さらに掘削時に岩盤等の接触により破損しないように、強固な筐体にすることが望ましい。
【0031】
<ケーブルの補足>
ロッド31は10m程度あるで、ロッド31の中央に中継モジュール2を設置した場合、下端アンテナ12と上端アンテナ13は有線ケーブル21を用いて接続する必要がある。有線ケーブル21は同軸ケーブルなど低損失ケーブルを用いることが望ましい。また、掘削中に岩石等の接触により有線ケーブル21の破損を防止するために、保護導管内に収めることが望ましい。
【0032】
<実施例1の補足>
実施例1では、送信ノードから複数台の中継ノード2によってマルチホップした後、地上の受信ノード3まで伝達するシステムの具体例を記したが、監視装置4から中継ノード2や送信ノード1の状態を制御する際は、実施例1と逆の動作をさせれば良い。
また実施例1では、送信ノード1のみセンサ61と接続されていて定期的に計測処理を実施したが、中継ノード2にもセンサが接続され、定期的に計測処理を実施しても構わない。
以上説明した実施例ではロッド31の1個当たり、中継ノードを1個としているため、コスト、中継による伝送遅延、作業者が電池を交換する手間を低減することができる。
【実施例2】
【0033】
実施例1では、送信ノード1から送信した計測情報を含む無線パケットを複数台の中継ノード2を介して地上の受信ノード3まで伝送するシステムについて記した。実施例2では、送信ノード1だけではなく中継ノード2にもセンサ301を接続する例について記す。送信ノード1だけではなく中継ノード2にもセンサ301が接続されるので、より詳細に掘削状況やセメントミルク濃度を把握することが可能となる一例を以下に説明する。
【0034】
<図3の説明>
図3は、実施例2における中継ノード2のブロック図である。ただし、合成分配器102と、下段アンテナ12と、上段アンテナ13と、有線ケーブル21は図2と同様の機能を有するので説明を省略する。センサ301は無線モジュール101に接続されている。
【0035】
<無線モジュールの機能>
無線モジュール101は、計測情報を含む無線パケットを中継する機能を有するとともに、予め決められた周期でセンサ301を用いて計測処理を行い、計測結果を無線パケットとして受信ノード3を送信先として送信する。その際、具体例1と同様に、中継ノード2と受信ノード3が直接、無線パケットの送受信を行う必要は無く、複数の中継ノード2を介して、無線パケットのやり取りが出来ればよい。
【0036】
<効果>
実施例2の効果の一例として、送信ノード11と接続されるセンサ61と、中継ノード2に接続されるセンサ301にセメントミルク濃度計測用センサを用いた場合について記す。
実施例1では、セメントミルクの濃度を計測する際、掘削ヘッド41にのみセメントミルク濃度計測用センサが接続されているので、掘削孔51内のセメントミルク濃度分布を把握するためには、送信ノード1を掘削孔51内において上下に動かしながらセメントミルク濃度を計測する必要がある。一方、実施例2では中継ノード2にもセメントミルク計測用センサが接続されているので、掘削ヘッド41を上下することなく、掘削孔51内におけるセメントミルク中の濃度分布を計測することが可能となる。
【実施例3】
【0037】
実施例2では、送信ノード1だけではなく中継ノード2にもセンサを接続することにより、送信ノード1にのみセンサを接続した場合に比べて、より詳細に掘削孔51のセメントミルク中の濃度分布を計測することが可能であることを述べた。
実施例3では、基礎施工作業中は常時振動が発生することを利用し、送信ノード1に接続されるセンサ61と中継ノード2に接続されるセンサ301として、振動検出センサを用いることによる省電力化について記す。
【0038】
<図4の説明>
図4は、実施例3における中継ノード2の動作フロー図である。以下、図4を用いて実施例3を説明する。
<中継ノードの一連の動作>
ステップS401で掘削状態情報伝送システムに電源投入された際、ステップS402で中継ノード2はアクティブモードに遷移する。ここで記すアクティブモードとは、無線モジュール101の全ての機能が動作可能な状態であり、送信ノード1や他の中継ノード2が送信した無線パケットを受信した場合、再送信する機能と、予め決められた周期で振動検出センサ301を用いて振動が発生しているか検知することにより、掘削中かどうかを判定する機能を有す。
【0039】
ステップS403で無線モジュール101が送信ノード1や他の中継ノード2から送信された無線パケットを受信した場合には(図中のYES)、ステップS404で無線モジュール101は、他の中継ノード2や受信ノード2に向けて無線パケットを再送信する。
また、ステップS405で無線モジュール101は、アクティブモードにおいて予め決められた周期で、振動検出センサ301を用いて振動検出処理を行う。ステップS403で無線パケットを受信しない場合には(図中のNO)、ステップS403での処理を繰り返す。
また、ステップS406において監視装置4は、ステップS405における振動検出処理による振動の検出結果を判定する。一定時間の間振動を検知できない場合には(図中のYES)、監視装置4は基礎施工作業が行われていないと判定し、ステップS407で中継ノード2をスリープモードに遷移させる。振動を検知した場合には(図中のNO)、ステップS403に戻り、処理を繰り返す。
【0040】
ここで言うスリープモードとは、無線モジュールの割り込み検出機能のみ動作させることにより、電池の消耗を抑えるモードである。
ステップS408で振動センサ301は振動検出処理を行い、振動が検出された場合には無線モジュール101に割り込み通知する。基礎施工作業が再開されたために、振動を検出し無線モジュール101に割り込み通知した場合には(図中のYES)、ステップS402に戻り、中継ノード2は再びアクティブモードに遷移する。振動を検出しない場合には(図中のNO)、ステップS408の判定を繰り返す。
上記は中継ノード2の一連の動作を説明したが、送信ノード1も同様の動作をするので説明を省略する。
【0041】
<効果>
既述したとおり送信ノード1や中継ノード2は電池起動されることが前提となるので、杭基礎施工作業を行わない時間帯(例えば夜間)は電池の消耗を抑える必要がある。実施例3では、基礎施工作業中は常時振動が発生することを利用し、送信ノード1に接続されるセンサ61と中継ノード2に接続されるセンサ301として、振動検出センサを用い基礎施工作業中かを判定し、掘削を行っていないときにスリープモードに遷移することにより省電力化する効果がある。
【0042】
ただし上記では、センサ61とセンサ301は振動検出センサを用いたが、杭基礎施工作業中における掘削ヘッド41やロッド31の振動が検出できるものであれば、振動センサ以外、例えば加速度センサなどのセンサを用いても構わない。
以上述べた実施形態は、本発明を限定するものではない。各実施形態に対して構成要素の変更や追加を行った実施形態を考えることができるが、いずれも本発明の範疇にある。
【符号の説明】
【0043】
1:送信ノード、2:中継ノード、3:受信ノード、4:監視装置、11:送信ノードのアンテナ、12:中継ノードの下端アンテナ、13:中継ノードの上端アンテナ、21:有線ケーブル、31:ロッド、41:掘削ヘッド、51:掘削孔、61:センサ、71:無線通信距離、101:無線モジュール、102:合成分配器、301:センサ。
【特許請求の範囲】
【請求項1】
掘削孔の掘削状態を監視する掘削状態監視システムであって、
該掘削状態監視システムは、前記掘削孔を掘削する掘削ヘッドと、該掘削ヘッドを駆動する動力を地上から伝送するロッドと、前記掘削状態に係る伝送情報を受信する受信ノードを備え、
前記掘削ヘッドは、
前記掘削状態に係る情報を計測するセンサと、
該センサが計測した前記掘削状態に係る情報に基づき所定の計測処理を行い前記伝送情報である無線パケットを生成する送信ノードと、
該送信ノードが生成した前記無線パケットを送信するアンテナを有し、
前記ロッドは、
前記前記無線パケットを受信する第1のアンテナと、
該第1のアンテナが受信した前記無線パケットを中継する中継ノードと、
該中継ノードが中継した前記無線パケットを送信する第2のアンテナを有し、
前記ロッドが前記掘削孔の掘削方向に複数設けられた場合には、
前記ロッドのうち前記掘削ヘッドに最も近いロッドの、第1のアンテナが前記掘削ヘッドの有するアンテナが送信した前記無線パケットを受信して、第2のアンテナが前記無線パケットを前記掘削ヘッドとは反対側に位置する前記ロッドの第1のアンテナへ送信し、
前記ロッドのうち前記受信ノードに最も近いロッドの、第1のアンテナが前記受信ノードとは反対側に位置する前記ロッドの有する第2のアンテナが送信した前記無線パケットを受信して、第2のアンテナから前記受信ノードへ送信することを特徴とする掘削状態監視システム。
【請求項2】
請求項1に記載の掘削状態監視システムにおいて、前記ロッドが有する中継ノードは、前記第1のアンテナ、もしくは前記第2のアンテナが受信した無線パケットを合成する合成分配器と、受信した無線パケットを他のロッドへ再送信するための無線モジュールを備えることを特徴とする掘削状態監視システム。
【請求項3】
請求項1に記載の掘削状態監視システムにおいて、前記センサは前記掘削孔におけるセメントミルク濃度を計測することを特徴とする掘削状態監視システム。
【請求項4】
請求項1に記載の掘削状態監視システムにおいて、前記センサは前記掘削ヘッドにおける振動を計測することを特徴とする掘削状態監視システム。
【請求項5】
請求項1に記載の掘削状態監視システムにおいて、前記ロッドは前記掘削状態に係る情報を計測するセンサを有することを特徴とする掘削状態監視システム。
【請求項6】
請求項1に記載の掘削状態監視システムにおいて、前記掘削ヘッドの送信ノードは、前記掘削状態に係る伝送情報を送信する必要のない場合には送信動作を停止するスリープモードを有することを特徴とする掘削状態監視システム。
【請求項7】
請求項1に記載の掘削状態監視システムにおいて、前記ロッドの中継ノードは、前記掘削状態に係る伝送情報を中継する必要のない場合には中継動作を停止するスリープモードを有することを特徴とする掘削状態監視システム。
【請求項8】
請求項4に記載の掘削状態監視システムにおいて、前記掘削ヘッドの送信ロッドと前記ロッドの中継ノードは、前記センサが計測した前記掘削ヘッドにおける振動量に基づき送信動作または中継動作を停止するスリープモードを有することを特徴とする掘削状態監視システム。
【請求項1】
掘削孔の掘削状態を監視する掘削状態監視システムであって、
該掘削状態監視システムは、前記掘削孔を掘削する掘削ヘッドと、該掘削ヘッドを駆動する動力を地上から伝送するロッドと、前記掘削状態に係る伝送情報を受信する受信ノードを備え、
前記掘削ヘッドは、
前記掘削状態に係る情報を計測するセンサと、
該センサが計測した前記掘削状態に係る情報に基づき所定の計測処理を行い前記伝送情報である無線パケットを生成する送信ノードと、
該送信ノードが生成した前記無線パケットを送信するアンテナを有し、
前記ロッドは、
前記前記無線パケットを受信する第1のアンテナと、
該第1のアンテナが受信した前記無線パケットを中継する中継ノードと、
該中継ノードが中継した前記無線パケットを送信する第2のアンテナを有し、
前記ロッドが前記掘削孔の掘削方向に複数設けられた場合には、
前記ロッドのうち前記掘削ヘッドに最も近いロッドの、第1のアンテナが前記掘削ヘッドの有するアンテナが送信した前記無線パケットを受信して、第2のアンテナが前記無線パケットを前記掘削ヘッドとは反対側に位置する前記ロッドの第1のアンテナへ送信し、
前記ロッドのうち前記受信ノードに最も近いロッドの、第1のアンテナが前記受信ノードとは反対側に位置する前記ロッドの有する第2のアンテナが送信した前記無線パケットを受信して、第2のアンテナから前記受信ノードへ送信することを特徴とする掘削状態監視システム。
【請求項2】
請求項1に記載の掘削状態監視システムにおいて、前記ロッドが有する中継ノードは、前記第1のアンテナ、もしくは前記第2のアンテナが受信した無線パケットを合成する合成分配器と、受信した無線パケットを他のロッドへ再送信するための無線モジュールを備えることを特徴とする掘削状態監視システム。
【請求項3】
請求項1に記載の掘削状態監視システムにおいて、前記センサは前記掘削孔におけるセメントミルク濃度を計測することを特徴とする掘削状態監視システム。
【請求項4】
請求項1に記載の掘削状態監視システムにおいて、前記センサは前記掘削ヘッドにおける振動を計測することを特徴とする掘削状態監視システム。
【請求項5】
請求項1に記載の掘削状態監視システムにおいて、前記ロッドは前記掘削状態に係る情報を計測するセンサを有することを特徴とする掘削状態監視システム。
【請求項6】
請求項1に記載の掘削状態監視システムにおいて、前記掘削ヘッドの送信ノードは、前記掘削状態に係る伝送情報を送信する必要のない場合には送信動作を停止するスリープモードを有することを特徴とする掘削状態監視システム。
【請求項7】
請求項1に記載の掘削状態監視システムにおいて、前記ロッドの中継ノードは、前記掘削状態に係る伝送情報を中継する必要のない場合には中継動作を停止するスリープモードを有することを特徴とする掘削状態監視システム。
【請求項8】
請求項4に記載の掘削状態監視システムにおいて、前記掘削ヘッドの送信ロッドと前記ロッドの中継ノードは、前記センサが計測した前記掘削ヘッドにおける振動量に基づき送信動作または中継動作を停止するスリープモードを有することを特徴とする掘削状態監視システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−2197(P2013−2197A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−136149(P2011−136149)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(000176512)三谷セキサン株式会社 (91)
【出願人】(504066081)株式会社レーザック (11)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(000176512)三谷セキサン株式会社 (91)
【出願人】(504066081)株式会社レーザック (11)
【Fターム(参考)】
[ Back to top ]