
掘削装置

【課題】機構がシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供する。
【解決手段】ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
【解決手段】ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、掘削装置に適用して好適な技術に関する。
より詳細には、小型でありながら安定した掘削性能を発揮する、掘削装置に関する。
【背景技術】
【0002】
地質調査は、建築物を建立したり、未開の地を調査する等の目的で実施される、重要な調査である。所定の掘削機械を用いて地面を掘り進め、地質を調べる。地質調査の手法には、標準貫入試験(JIS A 1219)やスウェーデン式サウンディング試験(JIS A 1221)が周知である。
なお、本発明に関係すると思われる先行技術文献を非特許文献1に示す。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】水野昇幸,吉田和哉:月・惑星掘削探査ロボットのプロトタイプ開発,計測自動制御学会東北支部,第199回研究集会,資料番号199-3,(2001)
【発明の概要】
【発明が解決しようとする課題】
【0004】
標準貫入試験は、地盤の工学的性質(N値)を直接的に得られるため、広く実施されているが、その反面、調査費用が数十万円と高額であることが欠点である。更に、軟弱地盤では採取したデータの誤差が大きくなってしまい、調査に適さない、という欠点もある。こういった見地から、安価でありながら容易に地質調査を実施できる手法或は装置の登場が望まれている。
【0005】
ところで、地質調査のニーズは地球上に限られない。将来、人類が宇宙に進出するためには、先ずその場所の調査が必須であり、その調査には地質調査も当然含まれる。地球から最も近い天体は月であり、月の地質調査についても研究が進んでいる。非特許文献1は、この月の地質調査に用いられる掘削機械の技術内容を開示している。
【0006】
周知のように月には大気がない。故に、月は地球と違って、宇宙空間から飛来する微粒子や隕石等の落下物が大気と摩擦して燃え尽きる、という現象が生じない。このため、月面はレゴリスと呼ばれる、宇宙から飛来する微粒子等に起因する砂で覆われていることが知られている。このような月面で地質調査を行う、ということは、地球で言えば砂漠のような軟弱地盤で地質調査を行う、という行為に近いことが想像できる。
更に、月面調査を行うに当たっては、先ずは無人調査を実施することとなるが、宇宙船等を打ち上げるためのロケットは極めて高額である。特に、打ち上げる物体の重さは、ロケットの推進能力を大きく左右する。従って、ロケットに乗せて月面に降ろす調査機械は、できる限り軽量であることが求められる。
【0007】
通常、掘削機械にはモータで駆動するドリルビットが設けられ、ドリルビットが地面を掘り進める。このとき、ドリルビットと地面との摩擦によって回転反力が生じる。掘削機械が軽量であると、掘削機械が安定しないので、ドリルビットが地面を掘れずに、回転反力によって掘削機械自体がドリルビットを中心に回ってしまう、という事故を生じる虞がある。このため、従来の掘削機械は回転反力に耐えられるように重厚なやぐらが設けられることが多い。
非特許文献1は、このような事故の発生を防ぐため、モータに加わる回転反力を相殺する、三つのドリルビットを備えたドリルビットユニットが開示されている。しかし、三つのドリルビットを備える、という設計は、ドリルビットユニット自体が大型になってしまい、軽量化が難しい。更に、三つのドリルビットを備える、ということは、それだけ部品点数が多いので、装置のコストが上昇する。
ドリルビットに生じる回転反力を相殺しつつ、装置自体の重力加速度だけで安定して地面を掘り進めることができるような掘削装置が実現できれば、重厚なやぐらが不要になり、理想的である。
【0008】
本発明はかかる点に鑑みてなされたものであり、機構が極めてシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の掘削装置は、ドリルビットと、ドリルビットを回転駆動するモータと、モータに固定され、ドリルビットの回転方向と同一方向にモータを回転駆動させるべく螺旋状に配置されてドリルビットが切削した切削物を駆動する複数の直線駆動機構とを有する。
【0010】
ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
この螺旋駆動機構により、従来技術でドリルビットの回転反力に抗するために必要だったやぐらが不要になり、土壌を掘削するための機構全体が極めて簡素になると共に、軽量にできる。
【発明の効果】
【0011】
本発明により、機構がシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態の例である、掘削装置の外観図である。
【図2】掘削装置の一部断面図である。
【図3】掘削装置及び掘削制御装置のブロック図である。
【図4】マイコンのメインルーチンを示すフローチャートである。
【図5】回転速度調節処理を示すフローチャートである。
【図6】ロック解除処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を、図1乃至図6を参照して説明する。
【0014】
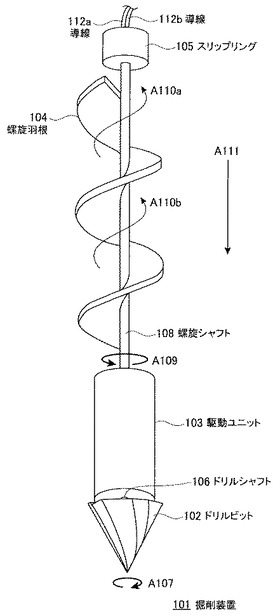
図1は、本発明の実施形態の例である、掘削装置の外観図である。
掘削装置101は、ドリルビット102と、ドリルビット102を回転駆動する駆動ユニット103と、駆動ユニット103によって回転駆動される螺旋羽根104と、螺旋羽根104の先端に設けられているスリップリング105よりなる。
掘削装置101は、先端側に地面等を掘削するためのドリルビット102が設けられる。
ドリルビット102は、モータが内蔵されている駆動ユニット103の先端部分から突出しているドリルシャフト106に固定されている。したがって、モータが回転すると、ドリルビット102はドリルシャフト106を通じて回転駆動され、地面等を掘削する。なお、ドリルビット102は矢印A107の方向に回転駆動される。
【0015】
駆動ユニット103は円筒形の金属製のケースで覆われている。
駆動ユニット103の内部には、ドリルビット102を回転駆動するためのドリルモータと、螺旋羽根104を回転駆動するための螺旋モータが内蔵されている。
駆動ユニット103の太さは、ドリルビット102が形成する穴の径よりも細い。ドリルビット102が削り出した土砂が駆動ユニット103の側壁部分を流れて螺旋羽根104に到達するために必要な隙間を、駆動ユニット103の側壁部分と穴の側壁との間に確保しなければならないためである。
駆動ユニット103の詳細な内部構成については後述する。
【0016】
螺旋状の羽根である螺旋羽根104は、螺旋シャフト108に設けられている。
螺旋羽根104は、螺旋シャフト108を通じて螺旋モータによって、ドリルビット102の回転方向とは逆方向(矢印A109)に回転駆動される。すると、螺旋羽根104は以下の三つの作用を生じる。
先ず、螺旋羽根104はドリルビット102が掘削して生じた土砂を掘削装置101の後ろ側に押し出す(矢印A110a及びA110b)。
次に、螺旋羽根104はドリルビット102が掘削して生じた土砂を掘削装置101の後ろ側に押し出すので、掘削装置101全体の推進力を生み出すと共に、ドリルビット102を地面に押し当てる圧力を生み出す(矢印A111)。
次に、ドリルビット102から生じる回転反力と、螺旋羽根104から生じる回転反力同士が駆動ユニット103において相殺し合うので、螺旋羽根104が回転駆動されることで、ドリルビット102が地面を掘削せずに駆動ユニット103が空転してしまうことを防止する。
【0017】
螺旋羽根104の太さは、ドリルビット102が形成する穴の径と等しいか、或は細いことが望ましい。但し、駆動ユニット103よりは太くなければならない。ドリルビット102が削り出した土砂が駆動ユニット103の側壁部分を流れて螺旋羽根104に到達するために必要な隙間を、駆動ユニット103の側壁部分と穴の側壁との間に確保しなければならないためである。
【0018】
螺旋シャフト108は中空形状の金属製のパイプである。例えば真鍮等が利用可能である。
螺旋羽根104及びドリルビット102の材質は、硬質のものであれば金属であっても、セラミックや合成樹脂等の非金属の物体であってもよい。但し、螺旋シャフト108か螺旋羽根104のいずれか一方は、金属製であることが望ましい。これは、周知の筐体接地を用いてスリップリング105の端子数を減らすためである。
螺旋シャフト108の中には、二本の導線が封入されている。これらはそれぞれドリルモータと螺旋モータの駆動電力を伝達する線である。また、前述の通り、螺旋シャフト108は金属製のパイプであるので、これが筐体接地の役割を担っている。
【0019】
螺旋シャフト108の、駆動ユニット103とは相対する側には、スリップリング105が設けられている。スリップリング105は、回転する物体に回転しない側の導線との電気的導通を実現するための、周知の回転端子である。スリップリング105からは導線112a及び導線112bが引き出される。これらはそれぞれドリルモータと螺旋モータの駆動電力を伝達する線である。また、スリップリング105の筐体は金属製であり、これが筐体接地の役割を担っている。
【0020】
図2は、駆動ユニット103の内部構成を示すための、掘削装置101の一部断面図である。
駆動ユニット103には、金属製のケース202の中に、ドリルモータ203と、螺旋モータ204と、螺旋モータ204に接続されるスリップリング205と、回路基板206と、加速度センサ207と、角速度センサ208が内蔵されている。
ドリルモータ203は、ドリルシャフト106を通じてドリルビット102を矢印A107方向に回転駆動する。図2では、ドリルビット102の先端の側から見ると、時計回り逆方向に回転駆動する。
螺旋モータ204はスリップリング205と螺旋シャフト108を通じて螺旋羽根104を矢印A109方向に回転駆動する。図2では、ドリルビット102の先端の側から見ると、時計回り方向に回転駆動する。
スリップリング205は、螺旋シャフト108の中に封入されている導線112a及び導線112bと、ドリルモータ203及び螺旋モータ204とを接続する。
【0021】
ケース202の、ドリルモータ203と螺旋モータ204との間には、回路基板206が設けられている。この回路基板206の、ケース202に接触する部分には、加速度センサ207と角速度センサ208が設けられている。
加速度センサ207は、駆動ユニット103が回転した時に発生する遠心力を電気信号に変換する。
角速度センサ208は、駆動ユニット103が回転した時の回転方向を電気信号に変換する。
回路基板206は、加速度センサ207及び角速度センサ208の信号を検出し、デジタルデータに変換した上で、適切な変調を施した信号に変換する。この信号は、ドリルモータ203及び螺旋モータ204に接続される導線112a及び導線112bに信号を重畳して送信される。信号の送信先は、後述する回転制御装置である。
【0022】
ドリルモータ203及び螺旋モータ204は、金属製のケース202に固着される。このケース202は、ドリルビット102が削った土砂がドリルモータ203及び螺旋モータ204や回路基板206等に接触しないように保護するために設けられている。また、このケース202は保護の役割だけでなく、ドリルモータ203がドリルビット102を回転駆動する際に生じる回転反力と、螺旋モータ204が螺旋羽根104を回転駆動する際に生じる回転反力とを相殺する、重要な役割を担う。
仮に、ドリルモータ203、螺旋モータ204、回路基板206等が土砂に接触しても大丈夫であるように、合成樹脂等でモールディングされた構造にした場合は、ケース202に気密性は要しないが、ドリルモータ203及び螺旋モータ204から夫々生じる回転反力同士を相殺できるに足りる剛性は備わっていなければならない。
【0023】
図3は、掘削装置101及び掘削制御装置のブロック図である。
加速度センサ207と角速度センサ208はA/D変換器302に接続される。A/D変換器302は、加速度センサ207と角速度センサ208から入力されるアナログ電圧信号を、デジタルデータに変換する。
変調部303はデジタルデータを適切な変調処理を施す。そして、変調処理が施された信号を導線112a及び導線112bに出力する。変調処理は、例えばPCM(Pulse Code Modulation)等の、周知の変調方式が利用可能である。
信号はスリップリング205及びスリップリング105を経由して、掘削制御装置301の差動増幅器304に入力される。差動増幅器304は周知のラインレシーバを構成する。差動増幅器304の出力信号は復調部305に入力され、デジタルデータである加速度センサ207と角速度センサ208のデータが得られる。
加速度センサ207と角速度センサ208のデータはマイコン306に入力される。
マイコン306は、復調部305から入力された加速度センサ207と角速度センサ208のデータを基に、ドリルモータ203及び螺旋モータ204の回転速度を制御するための回転速度データを算出する。
マイコン306が出力する回転速度データはD/A変換器307を通じてアナログ電圧信号に変換される。アナログ電圧信号はそれぞれドライバ308a及びドライバ308bに入力され、ドリルモータ203及び螺旋モータ204の駆動電力となって、導線112a及び導線112bに出力される。
【0024】
図4、図5及び図6を用いて、マイコン306が実行するドリルモータ203及び螺旋モータ204の回転速度制御の流れを説明する。
図4は、マイコン306のメインルーチンを示すフローチャートである。
処理を開始すると(S401)、マイコン306は加速度センサ207のデータを「第一閾値」と比較する(S402)。この第一閾値は、駆動ユニット103が許容できる程度の回転速度に収まっているか否かを判断する値である。もし、加速度センサ207のデータ(遠心力)が第一閾値未満であれば(S402のNO)、処理を終了する(S403)。但し、このメインルーチンは掘削装置101が動作している間は常に実行し続ける必要があるので、再度ステップS401から繰り返す。
【0025】
ステップS402で、もし、加速度センサ207のデータ(遠心力)が第一閾値以上であれば(S402のYES)、次にマイコン306は加速度センサ207のデータを「第二閾値」と比較する(S404)。この第二閾値は、ドリルビット102又は螺旋羽根104のいずれかが地中と固着してしまい、回転速度制御が不能な状態に陥ったか否かを判断する値である。
もし、加速度センサ207のデータ(遠心力)が第二閾値未満であれば(S404のNO)、回転速度調節処理を実行して(S405)、処理を終了する(S403)。
もし、加速度センサ207のデータ(遠心力)が第二閾値以上であれば(S404のYES)、ロック解除処理を実行して(S406)、処理を終了する(S403)。
【0026】
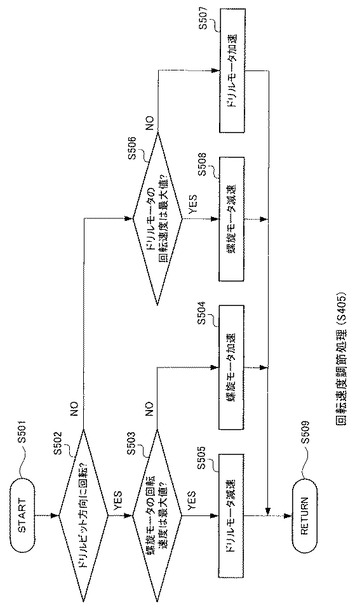
図5は回転速度調節処理を示すフローチャートである。図4のステップS405に相当する。
処理を開始すると(S501)、マイコン306は角速度センサ208のデータを見て、駆動ユニット103がどちらの方向に回転しているか、確認する(S502)。
駆動ユニット103がドリルビット102の回転方向と同じ方向に回転しているのであれば(S502のYES)、ドリルモータ203の回転力が螺旋モータ204の回転力に勝っている状態である。そこで、ドリルモータ203を減速するか、螺旋モータ204を加速するかのいずれかの措置を採る。これを判断するため、次にマイコン306は螺旋モータ204の現在の回転速度が、想定する最大速度の値であるか否かを確認する(S503)。
もし、螺旋モータ204が最大速度に至っていなければ(S503のNO)、螺旋モータ204を加速する(S504)。
もし、螺旋モータ204が最大速度に至っていれば(S503のYES)、螺旋モータ204は加速できないので、ドリルモータ203を減速する(S505)。
【0027】
ステップS502で、もし、駆動ユニット103がドリルビット102の回転方向の逆方向に回転しているのであれば(S502のNO)、螺旋モータ204の回転力がドリルモータ203の回転力に勝っている状態である。そこで、ドリルモータ203を加速するか、螺旋モータ204を減速するかのいずれかの措置を採る。これを判断するため、次にマイコン306はドリルモータ203の現在の回転速度が、想定する最大速度の値であるか否かを確認する(S506)。
もし、ドリルモータ203が最大速度に至っていなければ(S506のNO)、ドリルモータ203を加速する(S507)。
もし、ドリルモータ203が最大速度に至っていれば(S506のYES)、ドリルモータ203は加速できないので、螺旋モータ204を減速する(S508)。
ステップS504、S505、S507及びS508の、いずれか一つの処理を実行したら、一連の処理を終了する(S509)。
【0028】
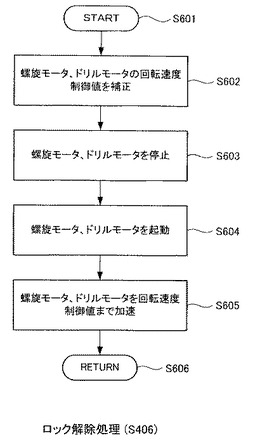
図6はロック解除処理を示すフローチャートである。図4のステップS406に相当する。
処理を開始すると(S601)、マイコン306は角速度センサ208のデータを見て、駆動ユニット103がどちらの方向に回転しているかを確認し、これに基づいて、図示しないメモリ内に保持しているドリルモータ203及び螺旋モータ204の回転速度制御値を補正する(S602)。
次に、マイコン306は一旦ドリルモータ203及び螺旋モータ204を停止する(S603)。このとき、マイコン306は加速度センサ207のデータを見て、駆動ユニット103の回転が停止したことを確認する。
そして、マイコン306は再びドリルモータ203及び螺旋モータ204を起動する(S604)。このとき、ドリルビット102及び螺旋羽根104の、地中との固着を解除するため、ドリルモータ203及び螺旋モータ204にはパルス状の駆動電流を与える。この「インパクト駆動」によって、地中との静止摩擦状態から動摩擦状態への転換を促す。
最後に、マイコン306はステップS602で保持していた回転速度制御値まで、ドリルモータ203及び螺旋モータ204を加速させて(S605)、一連の処理を終了する(S606)。
【0029】
掘削装置101が理想的な動作状態にあるときは、ドリルビット102と螺旋羽根104は、それぞれ地中とは動摩擦状態であり、駆動ユニット103は静止状態を維持する。この理想的な動作状態を維持するために、駆動ユニット103が回転しているか否かを、加速度センサ207で検出する。
駆動ユニット103が回転している、ということは、ドリルビット102から生じる回転反力と螺旋羽根104から生じる回転反力とのバランスが崩れていることを意味する。この、回転反力同士のバランスが崩れた状態を放置すると、ドリルビット102と螺旋羽根104のいずれかの回転が止まってしまい、掘削ができなくなってしまう。
このような掘削不能状態に陥ることを防ぐために、掘削制御装置301は加速度センサ207から駆動ユニット103の遠心力を検出し、二つの閾値と比較する。第一閾値は駆動ユニット103が許容できる程度の回転速度に収まっているか否かを判断する値であり、第二閾値はドリルビット102又は螺旋羽根104のいずれかが地中と固着してしまい、回転速度制御が不能な状態に陥ったか否かを判断する値である。
遠心力が第一閾値以上第二閾値未満であれば、ドリルビット102と螺旋羽根104はまだ地中との動摩擦状態を維持している。ドリルビット102と螺旋羽根104の回転速度を調節することで、遠心力を第一閾値未満に抑える制御が可能である。これが、図5の回転速度調節処理である。
遠心力が第二閾値以上であれば、ドリルビット102と螺旋羽根104のいずれかの回転が停止してしまっている。つまり、地中とは静止摩擦状態になってしまっている。したがって、静止摩擦状態から動摩擦状態に移行するために、一旦ドリルビット102と螺旋羽根104の回転を停止してから、強い衝撃を伴う回転起動動作を行う必要がある。これが、図6のロック解除処理である。
【0030】
本実施形態には、以下のような応用例が考えられる。
(1)本実施形態では、ドリルモータ203及び螺旋モータ204へ駆動電力を供給する手段として、スリップリング105及び205を用いた。螺旋羽根104が回転駆動されつつ、ドリルモータ203及び螺旋モータ204に電力を供給することができるものであれば、電力供給のための手段はスリップリングに限定されない。
例えば、螺旋シャフト108を二重の筒で構成し、外側の筒に螺旋羽根104を固定させ、内側の筒の内部に導線112a及び導線112bを収納する。外側の筒を螺旋モータ204で駆動し、内側の筒から導線112a及び導線112bを取り出す、という構成にしてもよい。
【0031】
(2)掘削制御装置301を小型化して回路基板206に設けると、制御された電力を供給するための導線112a及び導線112bは不要になり、代わりに一定の電力を供給するだけで済む。
【0032】
(3)遠心力は角速度の二乗に比例するので、角速度センサの信号から駆動ユニット103の回転速度を算出すれば、角速度センサの信号だけでも掘削制御は可能である。この場合は角速度センサが加速度センサを兼用することとなる。
【0033】
本実施形態においては、掘削装置を開示した。
ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
この螺旋駆動機構により、従来技術でドリルビットの回転反力に抗するために必要だったやぐらが不要になり、土壌を掘削するための機構全体が極めて簡素になると共に、軽量にできる。
【0034】
以上、本発明の実施形態例について説明したが、本発明は上記実施形態例に限定されるものではなく、特許請求の範囲に記載した本発明の要旨を逸脱しない限りにおいて、他の変形例、応用例を含む。
【符号の説明】
【0035】
101…掘削装置、102…ドリルビット、103…駆動ユニット、104…螺旋羽根、105…スリップリング、106…ドリルシャフト、108…螺旋シャフト、112a、112b…導線、202…ケース、203…ドリルモータ、204…螺旋モータ、205…スリップリング、206…回路基板、207…加速度センサ、208…角速度センサ、301…掘削制御装置、302…A/D変換器、303…変調部、304…差動増幅器、305…復調部、306…マイコン、307…D/A変換器、308a、308b…ドライバ
【技術分野】
【0001】
本発明は、掘削装置に適用して好適な技術に関する。
より詳細には、小型でありながら安定した掘削性能を発揮する、掘削装置に関する。
【背景技術】
【0002】
地質調査は、建築物を建立したり、未開の地を調査する等の目的で実施される、重要な調査である。所定の掘削機械を用いて地面を掘り進め、地質を調べる。地質調査の手法には、標準貫入試験(JIS A 1219)やスウェーデン式サウンディング試験(JIS A 1221)が周知である。
なお、本発明に関係すると思われる先行技術文献を非特許文献1に示す。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】水野昇幸,吉田和哉:月・惑星掘削探査ロボットのプロトタイプ開発,計測自動制御学会東北支部,第199回研究集会,資料番号199-3,(2001)
【発明の概要】
【発明が解決しようとする課題】
【0004】
標準貫入試験は、地盤の工学的性質(N値)を直接的に得られるため、広く実施されているが、その反面、調査費用が数十万円と高額であることが欠点である。更に、軟弱地盤では採取したデータの誤差が大きくなってしまい、調査に適さない、という欠点もある。こういった見地から、安価でありながら容易に地質調査を実施できる手法或は装置の登場が望まれている。
【0005】
ところで、地質調査のニーズは地球上に限られない。将来、人類が宇宙に進出するためには、先ずその場所の調査が必須であり、その調査には地質調査も当然含まれる。地球から最も近い天体は月であり、月の地質調査についても研究が進んでいる。非特許文献1は、この月の地質調査に用いられる掘削機械の技術内容を開示している。
【0006】
周知のように月には大気がない。故に、月は地球と違って、宇宙空間から飛来する微粒子や隕石等の落下物が大気と摩擦して燃え尽きる、という現象が生じない。このため、月面はレゴリスと呼ばれる、宇宙から飛来する微粒子等に起因する砂で覆われていることが知られている。このような月面で地質調査を行う、ということは、地球で言えば砂漠のような軟弱地盤で地質調査を行う、という行為に近いことが想像できる。
更に、月面調査を行うに当たっては、先ずは無人調査を実施することとなるが、宇宙船等を打ち上げるためのロケットは極めて高額である。特に、打ち上げる物体の重さは、ロケットの推進能力を大きく左右する。従って、ロケットに乗せて月面に降ろす調査機械は、できる限り軽量であることが求められる。
【0007】
通常、掘削機械にはモータで駆動するドリルビットが設けられ、ドリルビットが地面を掘り進める。このとき、ドリルビットと地面との摩擦によって回転反力が生じる。掘削機械が軽量であると、掘削機械が安定しないので、ドリルビットが地面を掘れずに、回転反力によって掘削機械自体がドリルビットを中心に回ってしまう、という事故を生じる虞がある。このため、従来の掘削機械は回転反力に耐えられるように重厚なやぐらが設けられることが多い。
非特許文献1は、このような事故の発生を防ぐため、モータに加わる回転反力を相殺する、三つのドリルビットを備えたドリルビットユニットが開示されている。しかし、三つのドリルビットを備える、という設計は、ドリルビットユニット自体が大型になってしまい、軽量化が難しい。更に、三つのドリルビットを備える、ということは、それだけ部品点数が多いので、装置のコストが上昇する。
ドリルビットに生じる回転反力を相殺しつつ、装置自体の重力加速度だけで安定して地面を掘り進めることができるような掘削装置が実現できれば、重厚なやぐらが不要になり、理想的である。
【0008】
本発明はかかる点に鑑みてなされたものであり、機構が極めてシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の掘削装置は、ドリルビットと、ドリルビットを回転駆動するモータと、モータに固定され、ドリルビットの回転方向と同一方向にモータを回転駆動させるべく螺旋状に配置されてドリルビットが切削した切削物を駆動する複数の直線駆動機構とを有する。
【0010】
ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
この螺旋駆動機構により、従来技術でドリルビットの回転反力に抗するために必要だったやぐらが不要になり、土壌を掘削するための機構全体が極めて簡素になると共に、軽量にできる。
【発明の効果】
【0011】
本発明により、機構がシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態の例である、掘削装置の外観図である。
【図2】掘削装置の一部断面図である。
【図3】掘削装置及び掘削制御装置のブロック図である。
【図4】マイコンのメインルーチンを示すフローチャートである。
【図5】回転速度調節処理を示すフローチャートである。
【図6】ロック解除処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を、図1乃至図6を参照して説明する。
【0014】
図1は、本発明の実施形態の例である、掘削装置の外観図である。
掘削装置101は、ドリルビット102と、ドリルビット102を回転駆動する駆動ユニット103と、駆動ユニット103によって回転駆動される螺旋羽根104と、螺旋羽根104の先端に設けられているスリップリング105よりなる。
掘削装置101は、先端側に地面等を掘削するためのドリルビット102が設けられる。
ドリルビット102は、モータが内蔵されている駆動ユニット103の先端部分から突出しているドリルシャフト106に固定されている。したがって、モータが回転すると、ドリルビット102はドリルシャフト106を通じて回転駆動され、地面等を掘削する。なお、ドリルビット102は矢印A107の方向に回転駆動される。
【0015】
駆動ユニット103は円筒形の金属製のケースで覆われている。
駆動ユニット103の内部には、ドリルビット102を回転駆動するためのドリルモータと、螺旋羽根104を回転駆動するための螺旋モータが内蔵されている。
駆動ユニット103の太さは、ドリルビット102が形成する穴の径よりも細い。ドリルビット102が削り出した土砂が駆動ユニット103の側壁部分を流れて螺旋羽根104に到達するために必要な隙間を、駆動ユニット103の側壁部分と穴の側壁との間に確保しなければならないためである。
駆動ユニット103の詳細な内部構成については後述する。
【0016】
螺旋状の羽根である螺旋羽根104は、螺旋シャフト108に設けられている。
螺旋羽根104は、螺旋シャフト108を通じて螺旋モータによって、ドリルビット102の回転方向とは逆方向(矢印A109)に回転駆動される。すると、螺旋羽根104は以下の三つの作用を生じる。
先ず、螺旋羽根104はドリルビット102が掘削して生じた土砂を掘削装置101の後ろ側に押し出す(矢印A110a及びA110b)。
次に、螺旋羽根104はドリルビット102が掘削して生じた土砂を掘削装置101の後ろ側に押し出すので、掘削装置101全体の推進力を生み出すと共に、ドリルビット102を地面に押し当てる圧力を生み出す(矢印A111)。
次に、ドリルビット102から生じる回転反力と、螺旋羽根104から生じる回転反力同士が駆動ユニット103において相殺し合うので、螺旋羽根104が回転駆動されることで、ドリルビット102が地面を掘削せずに駆動ユニット103が空転してしまうことを防止する。
【0017】
螺旋羽根104の太さは、ドリルビット102が形成する穴の径と等しいか、或は細いことが望ましい。但し、駆動ユニット103よりは太くなければならない。ドリルビット102が削り出した土砂が駆動ユニット103の側壁部分を流れて螺旋羽根104に到達するために必要な隙間を、駆動ユニット103の側壁部分と穴の側壁との間に確保しなければならないためである。
【0018】
螺旋シャフト108は中空形状の金属製のパイプである。例えば真鍮等が利用可能である。
螺旋羽根104及びドリルビット102の材質は、硬質のものであれば金属であっても、セラミックや合成樹脂等の非金属の物体であってもよい。但し、螺旋シャフト108か螺旋羽根104のいずれか一方は、金属製であることが望ましい。これは、周知の筐体接地を用いてスリップリング105の端子数を減らすためである。
螺旋シャフト108の中には、二本の導線が封入されている。これらはそれぞれドリルモータと螺旋モータの駆動電力を伝達する線である。また、前述の通り、螺旋シャフト108は金属製のパイプであるので、これが筐体接地の役割を担っている。
【0019】
螺旋シャフト108の、駆動ユニット103とは相対する側には、スリップリング105が設けられている。スリップリング105は、回転する物体に回転しない側の導線との電気的導通を実現するための、周知の回転端子である。スリップリング105からは導線112a及び導線112bが引き出される。これらはそれぞれドリルモータと螺旋モータの駆動電力を伝達する線である。また、スリップリング105の筐体は金属製であり、これが筐体接地の役割を担っている。
【0020】
図2は、駆動ユニット103の内部構成を示すための、掘削装置101の一部断面図である。
駆動ユニット103には、金属製のケース202の中に、ドリルモータ203と、螺旋モータ204と、螺旋モータ204に接続されるスリップリング205と、回路基板206と、加速度センサ207と、角速度センサ208が内蔵されている。
ドリルモータ203は、ドリルシャフト106を通じてドリルビット102を矢印A107方向に回転駆動する。図2では、ドリルビット102の先端の側から見ると、時計回り逆方向に回転駆動する。
螺旋モータ204はスリップリング205と螺旋シャフト108を通じて螺旋羽根104を矢印A109方向に回転駆動する。図2では、ドリルビット102の先端の側から見ると、時計回り方向に回転駆動する。
スリップリング205は、螺旋シャフト108の中に封入されている導線112a及び導線112bと、ドリルモータ203及び螺旋モータ204とを接続する。
【0021】
ケース202の、ドリルモータ203と螺旋モータ204との間には、回路基板206が設けられている。この回路基板206の、ケース202に接触する部分には、加速度センサ207と角速度センサ208が設けられている。
加速度センサ207は、駆動ユニット103が回転した時に発生する遠心力を電気信号に変換する。
角速度センサ208は、駆動ユニット103が回転した時の回転方向を電気信号に変換する。
回路基板206は、加速度センサ207及び角速度センサ208の信号を検出し、デジタルデータに変換した上で、適切な変調を施した信号に変換する。この信号は、ドリルモータ203及び螺旋モータ204に接続される導線112a及び導線112bに信号を重畳して送信される。信号の送信先は、後述する回転制御装置である。
【0022】
ドリルモータ203及び螺旋モータ204は、金属製のケース202に固着される。このケース202は、ドリルビット102が削った土砂がドリルモータ203及び螺旋モータ204や回路基板206等に接触しないように保護するために設けられている。また、このケース202は保護の役割だけでなく、ドリルモータ203がドリルビット102を回転駆動する際に生じる回転反力と、螺旋モータ204が螺旋羽根104を回転駆動する際に生じる回転反力とを相殺する、重要な役割を担う。
仮に、ドリルモータ203、螺旋モータ204、回路基板206等が土砂に接触しても大丈夫であるように、合成樹脂等でモールディングされた構造にした場合は、ケース202に気密性は要しないが、ドリルモータ203及び螺旋モータ204から夫々生じる回転反力同士を相殺できるに足りる剛性は備わっていなければならない。
【0023】
図3は、掘削装置101及び掘削制御装置のブロック図である。
加速度センサ207と角速度センサ208はA/D変換器302に接続される。A/D変換器302は、加速度センサ207と角速度センサ208から入力されるアナログ電圧信号を、デジタルデータに変換する。
変調部303はデジタルデータを適切な変調処理を施す。そして、変調処理が施された信号を導線112a及び導線112bに出力する。変調処理は、例えばPCM(Pulse Code Modulation)等の、周知の変調方式が利用可能である。
信号はスリップリング205及びスリップリング105を経由して、掘削制御装置301の差動増幅器304に入力される。差動増幅器304は周知のラインレシーバを構成する。差動増幅器304の出力信号は復調部305に入力され、デジタルデータである加速度センサ207と角速度センサ208のデータが得られる。
加速度センサ207と角速度センサ208のデータはマイコン306に入力される。
マイコン306は、復調部305から入力された加速度センサ207と角速度センサ208のデータを基に、ドリルモータ203及び螺旋モータ204の回転速度を制御するための回転速度データを算出する。
マイコン306が出力する回転速度データはD/A変換器307を通じてアナログ電圧信号に変換される。アナログ電圧信号はそれぞれドライバ308a及びドライバ308bに入力され、ドリルモータ203及び螺旋モータ204の駆動電力となって、導線112a及び導線112bに出力される。
【0024】
図4、図5及び図6を用いて、マイコン306が実行するドリルモータ203及び螺旋モータ204の回転速度制御の流れを説明する。
図4は、マイコン306のメインルーチンを示すフローチャートである。
処理を開始すると(S401)、マイコン306は加速度センサ207のデータを「第一閾値」と比較する(S402)。この第一閾値は、駆動ユニット103が許容できる程度の回転速度に収まっているか否かを判断する値である。もし、加速度センサ207のデータ(遠心力)が第一閾値未満であれば(S402のNO)、処理を終了する(S403)。但し、このメインルーチンは掘削装置101が動作している間は常に実行し続ける必要があるので、再度ステップS401から繰り返す。
【0025】
ステップS402で、もし、加速度センサ207のデータ(遠心力)が第一閾値以上であれば(S402のYES)、次にマイコン306は加速度センサ207のデータを「第二閾値」と比較する(S404)。この第二閾値は、ドリルビット102又は螺旋羽根104のいずれかが地中と固着してしまい、回転速度制御が不能な状態に陥ったか否かを判断する値である。
もし、加速度センサ207のデータ(遠心力)が第二閾値未満であれば(S404のNO)、回転速度調節処理を実行して(S405)、処理を終了する(S403)。
もし、加速度センサ207のデータ(遠心力)が第二閾値以上であれば(S404のYES)、ロック解除処理を実行して(S406)、処理を終了する(S403)。
【0026】
図5は回転速度調節処理を示すフローチャートである。図4のステップS405に相当する。
処理を開始すると(S501)、マイコン306は角速度センサ208のデータを見て、駆動ユニット103がどちらの方向に回転しているか、確認する(S502)。
駆動ユニット103がドリルビット102の回転方向と同じ方向に回転しているのであれば(S502のYES)、ドリルモータ203の回転力が螺旋モータ204の回転力に勝っている状態である。そこで、ドリルモータ203を減速するか、螺旋モータ204を加速するかのいずれかの措置を採る。これを判断するため、次にマイコン306は螺旋モータ204の現在の回転速度が、想定する最大速度の値であるか否かを確認する(S503)。
もし、螺旋モータ204が最大速度に至っていなければ(S503のNO)、螺旋モータ204を加速する(S504)。
もし、螺旋モータ204が最大速度に至っていれば(S503のYES)、螺旋モータ204は加速できないので、ドリルモータ203を減速する(S505)。
【0027】
ステップS502で、もし、駆動ユニット103がドリルビット102の回転方向の逆方向に回転しているのであれば(S502のNO)、螺旋モータ204の回転力がドリルモータ203の回転力に勝っている状態である。そこで、ドリルモータ203を加速するか、螺旋モータ204を減速するかのいずれかの措置を採る。これを判断するため、次にマイコン306はドリルモータ203の現在の回転速度が、想定する最大速度の値であるか否かを確認する(S506)。
もし、ドリルモータ203が最大速度に至っていなければ(S506のNO)、ドリルモータ203を加速する(S507)。
もし、ドリルモータ203が最大速度に至っていれば(S506のYES)、ドリルモータ203は加速できないので、螺旋モータ204を減速する(S508)。
ステップS504、S505、S507及びS508の、いずれか一つの処理を実行したら、一連の処理を終了する(S509)。
【0028】
図6はロック解除処理を示すフローチャートである。図4のステップS406に相当する。
処理を開始すると(S601)、マイコン306は角速度センサ208のデータを見て、駆動ユニット103がどちらの方向に回転しているかを確認し、これに基づいて、図示しないメモリ内に保持しているドリルモータ203及び螺旋モータ204の回転速度制御値を補正する(S602)。
次に、マイコン306は一旦ドリルモータ203及び螺旋モータ204を停止する(S603)。このとき、マイコン306は加速度センサ207のデータを見て、駆動ユニット103の回転が停止したことを確認する。
そして、マイコン306は再びドリルモータ203及び螺旋モータ204を起動する(S604)。このとき、ドリルビット102及び螺旋羽根104の、地中との固着を解除するため、ドリルモータ203及び螺旋モータ204にはパルス状の駆動電流を与える。この「インパクト駆動」によって、地中との静止摩擦状態から動摩擦状態への転換を促す。
最後に、マイコン306はステップS602で保持していた回転速度制御値まで、ドリルモータ203及び螺旋モータ204を加速させて(S605)、一連の処理を終了する(S606)。
【0029】
掘削装置101が理想的な動作状態にあるときは、ドリルビット102と螺旋羽根104は、それぞれ地中とは動摩擦状態であり、駆動ユニット103は静止状態を維持する。この理想的な動作状態を維持するために、駆動ユニット103が回転しているか否かを、加速度センサ207で検出する。
駆動ユニット103が回転している、ということは、ドリルビット102から生じる回転反力と螺旋羽根104から生じる回転反力とのバランスが崩れていることを意味する。この、回転反力同士のバランスが崩れた状態を放置すると、ドリルビット102と螺旋羽根104のいずれかの回転が止まってしまい、掘削ができなくなってしまう。
このような掘削不能状態に陥ることを防ぐために、掘削制御装置301は加速度センサ207から駆動ユニット103の遠心力を検出し、二つの閾値と比較する。第一閾値は駆動ユニット103が許容できる程度の回転速度に収まっているか否かを判断する値であり、第二閾値はドリルビット102又は螺旋羽根104のいずれかが地中と固着してしまい、回転速度制御が不能な状態に陥ったか否かを判断する値である。
遠心力が第一閾値以上第二閾値未満であれば、ドリルビット102と螺旋羽根104はまだ地中との動摩擦状態を維持している。ドリルビット102と螺旋羽根104の回転速度を調節することで、遠心力を第一閾値未満に抑える制御が可能である。これが、図5の回転速度調節処理である。
遠心力が第二閾値以上であれば、ドリルビット102と螺旋羽根104のいずれかの回転が停止してしまっている。つまり、地中とは静止摩擦状態になってしまっている。したがって、静止摩擦状態から動摩擦状態に移行するために、一旦ドリルビット102と螺旋羽根104の回転を停止してから、強い衝撃を伴う回転起動動作を行う必要がある。これが、図6のロック解除処理である。
【0030】
本実施形態には、以下のような応用例が考えられる。
(1)本実施形態では、ドリルモータ203及び螺旋モータ204へ駆動電力を供給する手段として、スリップリング105及び205を用いた。螺旋羽根104が回転駆動されつつ、ドリルモータ203及び螺旋モータ204に電力を供給することができるものであれば、電力供給のための手段はスリップリングに限定されない。
例えば、螺旋シャフト108を二重の筒で構成し、外側の筒に螺旋羽根104を固定させ、内側の筒の内部に導線112a及び導線112bを収納する。外側の筒を螺旋モータ204で駆動し、内側の筒から導線112a及び導線112bを取り出す、という構成にしてもよい。
【0031】
(2)掘削制御装置301を小型化して回路基板206に設けると、制御された電力を供給するための導線112a及び導線112bは不要になり、代わりに一定の電力を供給するだけで済む。
【0032】
(3)遠心力は角速度の二乗に比例するので、角速度センサの信号から駆動ユニット103の回転速度を算出すれば、角速度センサの信号だけでも掘削制御は可能である。この場合は角速度センサが加速度センサを兼用することとなる。
【0033】
本実施形態においては、掘削装置を開示した。
ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
この螺旋駆動機構により、従来技術でドリルビットの回転反力に抗するために必要だったやぐらが不要になり、土壌を掘削するための機構全体が極めて簡素になると共に、軽量にできる。
【0034】
以上、本発明の実施形態例について説明したが、本発明は上記実施形態例に限定されるものではなく、特許請求の範囲に記載した本発明の要旨を逸脱しない限りにおいて、他の変形例、応用例を含む。
【符号の説明】
【0035】
101…掘削装置、102…ドリルビット、103…駆動ユニット、104…螺旋羽根、105…スリップリング、106…ドリルシャフト、108…螺旋シャフト、112a、112b…導線、202…ケース、203…ドリルモータ、204…螺旋モータ、205…スリップリング、206…回路基板、207…加速度センサ、208…角速度センサ、301…掘削制御装置、302…A/D変換器、303…変調部、304…差動増幅器、305…復調部、306…マイコン、307…D/A変換器、308a、308b…ドライバ
【特許請求の範囲】
【請求項1】
ドリルビットと、
前記ドリルビットを回転駆動するドリルモータと、
前記ドリルモータを固定するケースと、
前記ケースの、前記ドリルビットが取り付けられている側とは反対の側に設けられる螺旋羽根と、
前記螺旋羽根を固定する螺旋シャフトと、
前記ケースに固定され、前記螺旋シャフトを通じて前記螺旋羽根を前記ドリルビットの回転方向とは逆方向に回転駆動する螺旋モータと
を有する掘削装置。
【請求項2】
前記螺旋シャフトは前記ドリルモータ及び前記螺旋モータに電力を供給する導線が格納されている、
請求項1記載の掘削装置。
【請求項3】
更に、
前記ケースに格納され、前記ケースの回転速度を検出する加速度センサと、
前記ケースに格納され、前記ケースの回転方向を検出する角速度センサと
を備え、
前記ドリルモータ及び前記螺旋モータは前記加速度センサ及び前記角速度センサの信号に基づいて回転速度が制御される、
請求項2記載の掘削装置。
【請求項1】
ドリルビットと、
前記ドリルビットを回転駆動するドリルモータと、
前記ドリルモータを固定するケースと、
前記ケースの、前記ドリルビットが取り付けられている側とは反対の側に設けられる螺旋羽根と、
前記螺旋羽根を固定する螺旋シャフトと、
前記ケースに固定され、前記螺旋シャフトを通じて前記螺旋羽根を前記ドリルビットの回転方向とは逆方向に回転駆動する螺旋モータと
を有する掘削装置。
【請求項2】
前記螺旋シャフトは前記ドリルモータ及び前記螺旋モータに電力を供給する導線が格納されている、
請求項1記載の掘削装置。
【請求項3】
更に、
前記ケースに格納され、前記ケースの回転速度を検出する加速度センサと、
前記ケースに格納され、前記ケースの回転方向を検出する角速度センサと
を備え、
前記ドリルモータ及び前記螺旋モータは前記加速度センサ及び前記角速度センサの信号に基づいて回転速度が制御される、
請求項2記載の掘削装置。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−38377(P2011−38377A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−189417(P2009−189417)
【出願日】平成21年8月18日(2009.8.18)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【出願人】(000154347)株式会社ユニバンス (132)
【出願人】(391018008)北海道電子機器株式会社 (1)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月18日(2009.8.18)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【出願人】(000154347)株式会社ユニバンス (132)
【出願人】(391018008)北海道電子機器株式会社 (1)
【Fターム(参考)】
[ Back to top ]