
掘進機の障害物探査装置及び掘進機の障害物探査方法
【課題】金属製障害物の探査が可能な掘進機の障害物探査装置を得る。
【解決手段】電磁波送信装置5と、電磁波送信装置5から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物9による誘導磁場を受信する電磁波受信装置6とを掘進機に設置し、前記電磁波受信装置6における受信センサ6の設置位置は、カッターヘッド2後方の隔壁19に設けた凹部18空間内であって、前記凹部18空間の軸心における軸心位置からずらせて設置して、前記受信センサ6を埋め込み、前記電磁波受信装置6で受信された電磁波の位相角における金属製障害物9が有るときと無いときの位相角差の変化を解析する位相変化解析装置7を備えた。
【解決手段】電磁波送信装置5と、電磁波送信装置5から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物9による誘導磁場を受信する電磁波受信装置6とを掘進機に設置し、前記電磁波受信装置6における受信センサ6の設置位置は、カッターヘッド2後方の隔壁19に設けた凹部18空間内であって、前記凹部18空間の軸心における軸心位置からずらせて設置して、前記受信センサ6を埋め込み、前記電磁波受信装置6で受信された電磁波の位相角における金属製障害物9が有るときと無いときの位相角差の変化を解析する位相変化解析装置7を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、推進工法又はシールド工法において、電磁波送信装置と電磁波受信装置を掘進機に備え、前記電磁波受信装置で受信された電磁波を用いて、掘進機の切羽前方の金属製障害物を探査する掘進機の障害物探査装置及び掘進機の障害物探査方法に関するものである。
【背景技術】
【0002】
シールド工法では、掘削開始後の掘進機の交換が殆ど不可能であるため、掘削中に掘進機が地中の障害物に当たって損傷すると、多大の損害を被る。さらに、掘進機が既設埋設物(例えば、大中口径水道鉄管)を損傷した場合は、社会的影響が甚大である。そのため、掘進中にシールド切羽前方に特にH形鋼や既設埋設物のような金属製障害物が迫ってきたときにそれを感知し、事故を未然に防ぐことができるような、金属製障害物の探査装置及び探査方法の提供が望まれている。
【0003】
従来、この種の障害物探査装置としては、音波発振器と、その音波発振器から出力され地中を伝搬した音波を受信する音波受信器とを掘進機に取付けて構成したものがある(特許文献1)。しかし、音波を利用する障害物探査装置は、地中において、金属製障害物と玉石又は礫(小石)との区別がつかない。玉石、礫は推進工法とシールド工法では障害物ではない。地中では、出力した音波も、障害物等によって反射された音波も、玉石、礫によって拡散してしまい障害物を感知できないことが多い。又、地中内に空洞があると音波が伝わらない等の問題がある。
【0004】
また、従来、レーダーを利用した障害物探査装置がある(例えば、特許文献2)。一般的に、レーダーでは、周波数が低い電波を使うと電波の減衰が少なく、遠くまで探知することができるが、分解能が低くなるため、目標の解像度は悪くなる。逆に、周波数が高い電波は、空気中に含まれる水蒸気や雲・雨などに吸収・反射され易いので減衰が大きく、遠くまで探知することはできないが、高い解像度を得ることができる性質がある。しかし、水中では減衰が大きく透過性がない。そのため地中において含水比の大きい土質や、地下水位の高い地中における探査には適していない問題がある。
【0005】
さらに、従来、高周波交番磁束を利用した障害物探査装置がある(例えば、特許文献3)。掘進機のカッターヘッドに、その発生磁束がカッターヘッドの前方へ向かうようにしてプローブを取付ける。プローブの取付位置は、カッターヘッドの外周近傍である。プローブに高周波電力を供給しつつカッターヘッドを回転させて掘削を実行すると、プローブがシールド切羽前方をカッターヘッドの外周に沿って走査する。この走査に伴って生じるプローブのインピーダンスの変化を連続的に検出し、その検出した地盤のインピーダンス変化を解析してシールド切羽前方の鉄製障害物の有無を判定するものである。しかし、インピーダンスの変化による解析方法は計測距離が小さく、中大口径 800mm〜2000mmに対して、小さな掘進機(例えば、口径が700mm以下)には適さない問題がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−242254号公報
【特許文献2】特開平8−21184号公報
【特許文献3】特開平10−306686号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
この発明は、上述のような問題を解決するためになされたもので、水分の多い土質や地下水位に影響が少なく、金属製障害物と玉石,礫とを区別して、金属製障害物(例えば、鉄製金属,鉄,鋳鉄,アルミニウム)の探査が可能であり、推進工法やシールド工法の小口径から大口径の掘進機に適用可能である掘進機の障害物探査装置及び掘進機の障害物探査方法を得ることを目的とするものである。
【課題を解決するための手段】
【0008】
この発明に係わる掘進機の障害物探査装置は、電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査するものである。
【0009】
また、この発明に係わる掘進機の障害物探査装置は、電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査するものである。
【0010】
また、この発明に係わる掘進機の障害物探査方法は、掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、
前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにしたものである。
【0011】
さらに、この発明に係わる掘進機の障害物探査方法は、掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにしたものである。
【発明の効果】
【0012】
この発明の掘進機の障害物探査装置及び掘進機の障害物探査方法によれば、水分の多い土質や地下水位に影響が少なく、金属製障害物と玉石,礫とを区別して、金属製障害物の探査が可能であり、推進工法やシールド工法の小口径から大口径の掘進機に適用可能である掘進機の障害物探査装置及び掘進機の障害物探査方法を得ることができる。さらに、電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込んだので、受信コイルの出力の減衰を抑えることができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1における掘進機の障害物探査装置を示す構成図である。
【図2】実施の形態1の掘進機の障害物探査装置における回路部を示すブロック構成図である。
【図3】この発明の原理を説明する説明図である。
【図4】実施の形態1における電磁波送信装置の送信電流と送信磁場を示す波形図である。
【図5】実施の形態1における初期値の△φoを示す図である。
【図6】実施の形態1における掘削時の△φjを示す図である。
【図7】実施の形態2の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図である。
【図8】実施の形態3の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図である。
【発明を実施するための形態】
【0014】
実施の形態1.
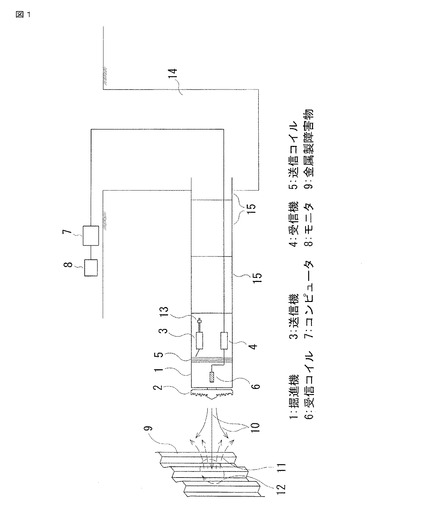
図1はこの発明の実施の形態1における掘進機の障害物探査装置を示す構成図である。
1は掘進機で、前部に回転式のカッターヘッド2が備えられている。掘進機1の後方の発進立坑14に至るまでの掘削完了領域には、組み立てられ連結された後続管15が構築されている。3は掘進機1(の運転部)に設置された送信機で、交流100V電源13より電力が供給される。5は送信コイルで、掘進機1の先端部、例えば、鋼製の外筒の先端部の外周溝(環状溝)に、例えばエナメル線で10〜100ターンを巻回させ、送信機3の出力端に接続されている。送信コイル5は、発生させた電磁波であり、時間で変化する磁場(1次磁場)10を、切羽前方の地中に送信する。送信コイル5を埋め込み納めた環状溝の表面部は、エポキシ樹脂(非金属性の保護材)で被い固めて保護と防水を施している。送信機3と送信コイル5とで、電磁波送信装置を構成している。
【0015】
4は掘進機1(の運転部)に設置された受信機である。受信コイル6は、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物9(例えば、H形鋼,鋼管,鋼矢板,鋼杭や大中口径水道鉄管等)による誘導磁場(2次磁場)11を受信し、その出力端を受信機4の入力端に接続して、受信コイル6の出力を、受信機4に入力する。12は電磁波を受けることによって生じる金属製障害物9(以下単に障害物9という)の誘導電流である。受信コイル6は、掘進機1の先端部、例えば、鋼製の外筒の外周もしくは内周の凹部又はカッターヘッド2後方の隔壁の凹部に埋め込まれ、凹部の表面部は、エポキシ樹脂(非金属性の保護材)で被い保護と防水を施している。受信機4と受信コイル6とで電磁波受信装置を構成している。
【0016】
7は掘進機1の外部に設置されたパーソナルコンピュータ(PC)(以下コンピュータと称す)で、入力端末を有し前記電磁波受信装置と接続され、前記電磁波受信装置で受信された電磁波の位相角における障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を有している。8はコンピュータ7に接続され、位相変化解析装置の解析結果が表示されるモニタである。受信コイルは、受信センサであり、受信コイルのほか、磁気センサやホール素子でもよい。なお、電磁波送信装置の送信磁場又は送信電流の情報をコンピュータ7に取込む必要があるときは、送信機3からA/D変換器を介して送信機3とコンピュータ7が接続される。
【0017】
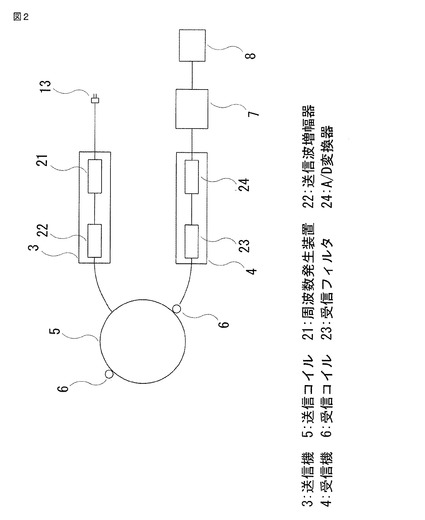
図2は実施の形態1の掘進機の障害物探査装置における回路部を示すブロック構成図である。図1の構成図より回路部を取り出してより詳しく説明する図である。なお、各図中の同一符号は同一又は相当部分を示し、以下同様である。送信機3は電源13に接続された周波数発生装置21とこれに接続された送信波増幅器22で構成されており、送信波増幅器22は送信コイル5に接続されている。
【0018】
周波数発生装置21は、100Hz〜100kHzの低周波数の交流を用いている。周波数が100Hz以下になると、誘導磁場(2次磁場)11が発生しにくくなる。理論的には送信磁場(1次磁場)10によって障害物9に発生する誘導起電力は送信磁場10の時間tによる微分で求められ、計算の結果、誘導起電力の強度は周波数に比例する。そのため、誘導磁場(2次磁場)11の強度も必然的に周波数に比例する。周波数が100kHz以上になると、地中の電磁波の透過性が悪くなる。地中に水など電気抵抗の低い物質が多くなればより電磁波の透過性が悪くなる。このため、周波数発生装置21の周波数(送信周波数)は1000Hz〜50kHzの周波数を使うのが効率的であり、1000Hz〜3800Hzを使用するのがさらに望ましい。
【0019】
受信機4は、受信コイル6に接続された受信フィルタ23と、これに接続されたA/D変換器24で構成されており、A/D変換器24はコンピュータ7に接続されている。なお、受信フィルタ23の前段に増幅器を接続しておいてもよい。コンピュータ7はA/D変換器24を介して受け取った計測データを解析する(後述)ことで、切羽前方(カッターヘッド前方)の障害物の存在の有無を判定する。また必要により、コンピュータ7には、カッターヘッド2の回転信号や掘進機1の速度等の掘進データを含む掘進機1の動作情報が、掘進機1の運転制御器から入力されて、A/D変換器24からの計測データの位相変化解析結果と前記掘進機1の動作情報とを統合して解析することによって、切羽前方の障害の位置・方向を推定し、その推定した位置をモニタ8上に表示するとよい。受信コイル6は、互いに離間して複数個設けてもよい(実施の形態2,3)。例えば、掘進機1の外筒の外周もしくは内周の凹部を、180°隔てて設けて、2個の受信コイル6を埋め込んで設置する。2個の受信コイル6をそれぞれ受信機4に時分割的に切替接続して受信する。受信コイル6を4個設置するときは、90°隔てて設けるとよい。
【0020】
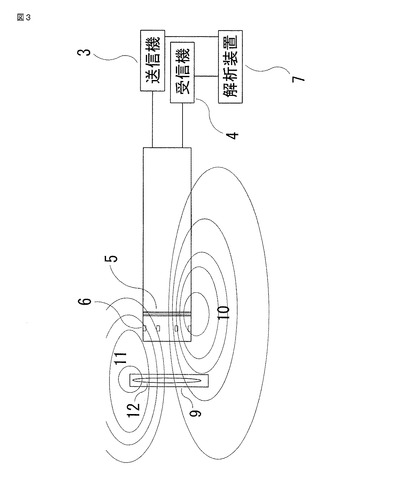
次に誘導磁場を分離する解析方法について説明する。図3はこの発明の原理を説明する説明図である。
1.基礎となる原理:
送信コイル5より発生させた送信磁場10は、障害物9に誘導磁場11を、以下の順に引き起こさせる。
時間で変化する磁場10(送信磁場) → 障害物9に誘導起電力が発生する。→ 障害物9に誘導電流12が流れる。 → 誘導電流12により誘導磁場11が発生する。
【0021】
このとき、各現象の数式は次のようになる。
送信機3の送信電流: Icos(ωt)
(I:電流,ω:角周波数,t:時間),(ω=2πf f:周波数[Hz])
送信磁場10: H1cos(ωt) [ビオ・サバールの法則]
{H1:磁場(磁界)}
誘導起電力に関する項: ―△φ/△t=ωμoSH1sin(ωt)
(φ(磁束)=μoSH1,μo:真空の透磁率,S:面積)
[ファラデーの法則]
誘導電流12に関する項: σωH1sin(ωt) [オームの法則]
{σ:障害物9の導電率(比抵抗の逆数)}
誘導磁場11: σωH2sin(ωt) [ビオ・サバールの法則]
{H2:磁場(磁界)}
受信波形: 受信波形は送信磁場10と誘導磁場11の合成波形である。ただし、送信磁場10はcos(ωt)、誘導磁場11はsin(ωt)の波でありフーリエ解析により分離できる。
【0022】
障害物9により発生した誘導磁場11を電磁波受信装置で捉えることにより障害物9の有無が分かる。また、複数の受信コイル6を用いれば、それら受信コイル6の出力(位相)の差により、障害物9の存在方向が解る。障害物9を事前に感知することにより、事故を未然に防ぐことができる。
【0023】
2.実際の探査方法:
実際には、受信コイル6により受信した電磁波(誘導磁場11)は、(a)障害物9の誘導磁場11、(b)送信した磁場10、そして(c)マシンや周辺の地盤による誘導磁場からなる。これら3種(a〜c)の混ざり合った磁場の中から(a)障害物9の誘導磁場11のみを抽出する方法を以下に述べる。
(1)事前に障害物9のない位置で初期値となる磁場(d)を測定する。この初期値となる磁場(d)は、(b)と(c)の混合した磁場である。
(2)次に、掘削中に磁場を測定する。障害物9が前方に存在する位置に来ると、初期値の磁場(d)に(a)障害物9の誘導磁場が加算される。
(3)(a)を分離し障害物を見分ける。この見分けは、例えば、位相差(位相角差)で行う。
【0024】
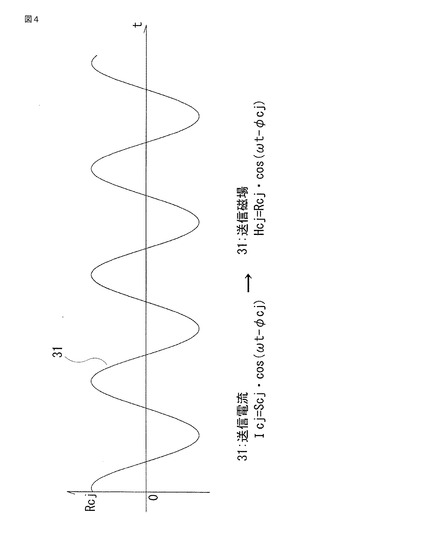
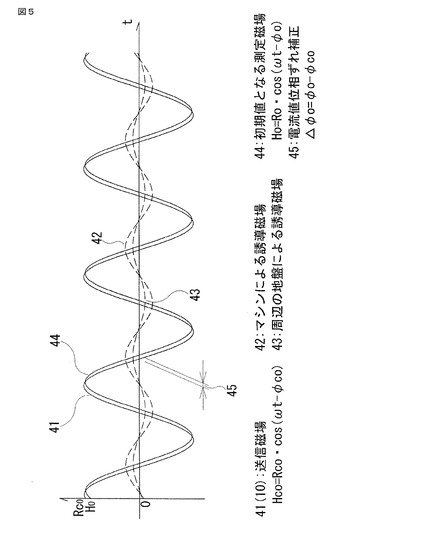
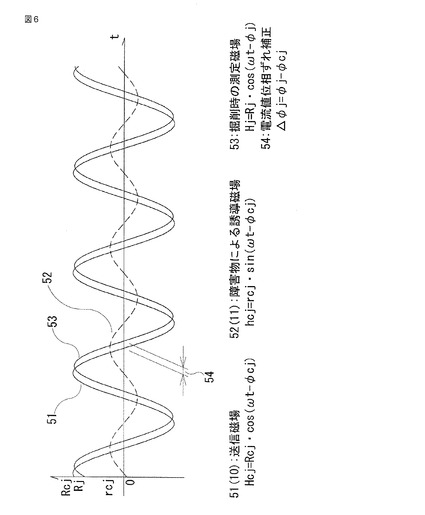
図によって、位相差(位相角差)を表してみる。図4は実施の形態1における電磁波送信装置の送信電流と送信磁場を示す波形図である。31は送信電流波形又は送信磁場波形を示す。図5は実施の形態1における初期値の△φoを示す図である。41(10)は送信磁場波形である。なお、( )で示す符号は、他の図で用いた相当する符号を示す。以下同じである。42はマシンによる誘導磁場波形、43は周辺の地盤による誘導磁場波形、44は初期値となる測定磁場波形、45は電流値位相ずれ補正角を示す。図6は実施の形態1における掘削時の△φjを示す図である。51(10)は送信磁場波形、52(11)は障害物による誘導磁場波形hcj=rcj・sin(ωt-φcj)、53は掘削時の測定磁場波形、54は電流値位相ずれ補正角を示す。
【0025】
3.解析方法:
(1)送信機3から流す送信電流をIcjとする。ここでIcjはjの測定を行った時の電流値を意味する。
Icj=Scj・cos(ωt-φcj)
ここで、Scj:電流強度、t:時間[sec]、ω:角周波数(=2πf) f:周波数[Hz]
φcj:位相角[°]
次にIcjによって発生する送信磁場10をHcjとすると、
Hcj=Rcj・cos(ωt-φcj)
ここで、Rcj:磁場強度であり、送信機3から流す電流と同相である。
(2)初期値となる測定磁場をHoとする。
Ho=Ro・cos(ωt-φo)
ここで、Ro:磁場強度、φo:位相角[°]
(3)掘削時の測定磁場をHjとする。
Hj=Rj・cos(ωt-φj)
ここで、Rj:磁場強度、φj:位相角[°]
このように、初期値(例えば、障害物が無い時)と掘削時(例えば、障害物が有る時)とで、位相角に違いが生じるので、電磁波受信装置で受信された電磁波(測定磁場)の位相角における障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を備えたことにより、障害物を探査することができる。
【0026】
実際的には、より正確度を上げるために、
(4)(*1計算)により、以下の各位相角の値を計算する。
電流値位相ずれ補正:
△φo=φo-φco
△φj=φj-φcj
ここで、φco:送信機3から流す初期値の電流をIcoとすると、
Ico=Sco・cos(ωt-φco)、送信磁場Hco=Rco・cos(ωt-φco)となるが、その時の位相角[°]である。
初期値補正:
△φoj=△φj-△φo
△φojは、障害物9が存在した場合、誘導磁場11のためにある値を示す。逆に、障害物9がなければ△φoj≒0となる。
この△φojの値を、数値、あるいは図化することにより障害物の有無を探査する。
【0027】
(*1計算)
一般式として、H:磁場、R:受信磁場強度、φ:位相角とする。
H=Rcos(ωt-φ)
H=R(cos(φ)cos(ωt) + sin(φ)sin(ωt))
フーリエ解析を用いて、
cos(ωt)の項を取り出すと、A=Rcos(φ)
sin(ωt)の項を取り出すと、B=Rsin(φ)
B/A=(Rsin(φ))/(Rcos(φ))
B/A=tan(φ)
∴ φ=tan-1(B/A)
【0028】
つまり、
初期値の△φo=初期の受信コイルによる測定磁場の位相角―初期の送信磁場(又は送信電流)の位相角
掘削時の△φj=掘削時の受信コイルによる測定磁場の位相角―掘削時の送信磁場(又は送信電流)の位相角
位相角差の差△φoj=掘削時の△φj―初期値の△φoが障害物9が存在した場合、誘導磁場11のためにある値を示す。逆に、障害物9がなければ△φoj≒0となる。
【0029】
このように、電磁波受信装置で受信された電磁波(測定磁場)の位相角と、電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、障害物が有るときと無いときの位相角差の差の変化を解析する位相変化解析装置を備えたことにより、障害物をより正確に探査することができる。
【0030】
実測結果では、送信機3の周波数発生装置21の周波数(送信電流の周波数)が、2000Hzで、初期値の△φo=5.013°であり、切羽前方2mの位置の障害物を感知したときの掘削時の△φj=5.224°であった。そのため、位相角差の差△φoj=△φj-△φo=5.224°−5.013°=0.211°となった。実測結果では、インピーダンス解析より遠く、例えば2m程度で、障害物を検知できた。このように、インピーダンス解析より遠くの障害物を検知できる掘進機の障害物探査装置及び掘進機の障害物探査方法を得ることができる。
【0031】
実施の形態2.
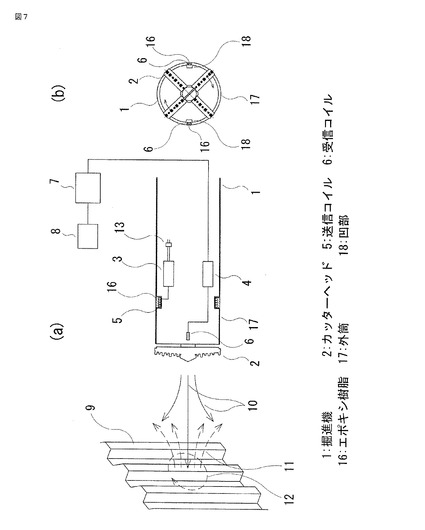
図7は実施の形態2の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図で、その(a)は全体構成図、その(b)はカッターヘッド側から掘進機を見たときの側面図である。受信コイル6は、外筒17のカッターヘッド2側縁部における外周に穿設した凹部18に埋設して設置されている。受信コイル6の端子は外筒17の凹部18から内部(運転部)に引き込まれて受信機4に接続されている。受信コイル6を埋め込んだ凹部18の表面部はエポキシ樹脂で被われて保護と防水が施されている。
【0032】
外筒17の凹部18に埋め込んだ受信コイル6は、1個で、図7で示す2個の凹部18のどちらか1個だけでもよいが、実施の形態2では、図7に示すように、外筒17の凹部18は、外周上で180°離間させて2個設けられ、それぞれに受信コイル6が設置され、2個の受信機コイル6がそれぞれ受信機4に接続される。2個の受信機コイル6と受信機4との接続は時分割的に切替接続されるようにするとよい。同様に、外筒17の凹部18は、外周上で90°離間させて4個設けられ、それぞれに受信コイル6が設置され、4個の受信機コイル6がそれぞれ受信機4に時分割的に切替接続されるようにしてもよい。
他の回路,構成や構造及び動作は実施の形態1と同様である。
【0033】
受信コイル6を複数個設けることにより、障害物に接近した受信コイル6は、他のものと比較して、障害物の応答である位相角差の差(△φoj)が大きくなる。その結果、掘削中の掘進機1に4個の受信コイルを上下左右に設けた場合、上前方、下前方、左前方、あるいは右前方のいずれに障害物が接近してきているかを示す障害物存在方向を明らかにすることができる。
【0034】
実施の形態3.
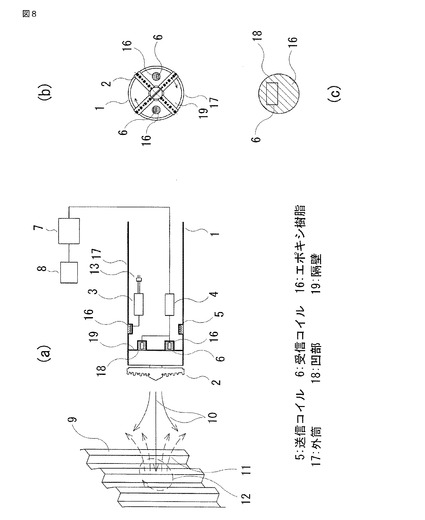
図8は実施の形態3の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図で、その(a)は全体構成図、その(b)はカッターヘッド側から掘進機を見たときの側面図、その(c)は、(b)の受信コイルの埋め込み凹部の拡大図である。受信コイル6は、カッターヘッド2の即後方の隔壁19で、カッターヘッド2側から設けた凹部18に埋設して設置されている。受信コイル6を埋め込んだ隔壁19の凹部18の表面部(カッターヘッド2側からみた表面部)はエポキシ樹脂16で被われて保護と防水が施されている。受信コイル6の端子は隔壁19の凹部18から内部(運転部)に引き込まれて受信機4に接続されている。凹部18のカッターヘッド2側からみた形状は、例えば円形であり、凹部18の深さ方向の形状は軸心がある円柱状穴である。受信コイル6は円柱状穴の軸心を外しして設置されている。つまり、受信コイル6(受信センサ)の設置位置は、隔壁19に設けた軸心を有する凹部空間内であって、前記凹部空間の軸心位置からずらせて設置されている。他の回路,構成や構造及び動作は実施の形態1と同様である。
【0035】
受信コイル6を凹部空間の軸心位置からずらせて設置すると、受信コイル6を取り囲む金属部分に対して非対称、すなわち円柱状穴であれば軸心位置を避けた位置に設置し、障害物からの誘導磁場を、受信コイル6の周囲の金属に生じた打消し磁場で消失させず受信できるようにする。これにより、受信コイル6の出力の減衰を抑えることができる。
【符号の説明】
【0036】
1 掘進機 2 カッターヘッド
3 送信機 4 受信機
5 送信コイル 6 受信コイル
7 コンピュータ 8 モニタ
9 障害物 10 送信磁場(1次磁場)
11 誘導磁場(2次磁場) 12 誘導電流
13 電源 14 発進立坑
15 後続管 16 エポキシ樹脂
17 外筒 18 凹部
19 隔壁 21 周波数発生装置
22 送信波増幅器 23 受信フィルタ
24 A/D変換器
【技術分野】
【0001】
この発明は、推進工法又はシールド工法において、電磁波送信装置と電磁波受信装置を掘進機に備え、前記電磁波受信装置で受信された電磁波を用いて、掘進機の切羽前方の金属製障害物を探査する掘進機の障害物探査装置及び掘進機の障害物探査方法に関するものである。
【背景技術】
【0002】
シールド工法では、掘削開始後の掘進機の交換が殆ど不可能であるため、掘削中に掘進機が地中の障害物に当たって損傷すると、多大の損害を被る。さらに、掘進機が既設埋設物(例えば、大中口径水道鉄管)を損傷した場合は、社会的影響が甚大である。そのため、掘進中にシールド切羽前方に特にH形鋼や既設埋設物のような金属製障害物が迫ってきたときにそれを感知し、事故を未然に防ぐことができるような、金属製障害物の探査装置及び探査方法の提供が望まれている。
【0003】
従来、この種の障害物探査装置としては、音波発振器と、その音波発振器から出力され地中を伝搬した音波を受信する音波受信器とを掘進機に取付けて構成したものがある(特許文献1)。しかし、音波を利用する障害物探査装置は、地中において、金属製障害物と玉石又は礫(小石)との区別がつかない。玉石、礫は推進工法とシールド工法では障害物ではない。地中では、出力した音波も、障害物等によって反射された音波も、玉石、礫によって拡散してしまい障害物を感知できないことが多い。又、地中内に空洞があると音波が伝わらない等の問題がある。
【0004】
また、従来、レーダーを利用した障害物探査装置がある(例えば、特許文献2)。一般的に、レーダーでは、周波数が低い電波を使うと電波の減衰が少なく、遠くまで探知することができるが、分解能が低くなるため、目標の解像度は悪くなる。逆に、周波数が高い電波は、空気中に含まれる水蒸気や雲・雨などに吸収・反射され易いので減衰が大きく、遠くまで探知することはできないが、高い解像度を得ることができる性質がある。しかし、水中では減衰が大きく透過性がない。そのため地中において含水比の大きい土質や、地下水位の高い地中における探査には適していない問題がある。
【0005】
さらに、従来、高周波交番磁束を利用した障害物探査装置がある(例えば、特許文献3)。掘進機のカッターヘッドに、その発生磁束がカッターヘッドの前方へ向かうようにしてプローブを取付ける。プローブの取付位置は、カッターヘッドの外周近傍である。プローブに高周波電力を供給しつつカッターヘッドを回転させて掘削を実行すると、プローブがシールド切羽前方をカッターヘッドの外周に沿って走査する。この走査に伴って生じるプローブのインピーダンスの変化を連続的に検出し、その検出した地盤のインピーダンス変化を解析してシールド切羽前方の鉄製障害物の有無を判定するものである。しかし、インピーダンスの変化による解析方法は計測距離が小さく、中大口径 800mm〜2000mmに対して、小さな掘進機(例えば、口径が700mm以下)には適さない問題がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−242254号公報
【特許文献2】特開平8−21184号公報
【特許文献3】特開平10−306686号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
この発明は、上述のような問題を解決するためになされたもので、水分の多い土質や地下水位に影響が少なく、金属製障害物と玉石,礫とを区別して、金属製障害物(例えば、鉄製金属,鉄,鋳鉄,アルミニウム)の探査が可能であり、推進工法やシールド工法の小口径から大口径の掘進機に適用可能である掘進機の障害物探査装置及び掘進機の障害物探査方法を得ることを目的とするものである。
【課題を解決するための手段】
【0008】
この発明に係わる掘進機の障害物探査装置は、電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査するものである。
【0009】
また、この発明に係わる掘進機の障害物探査装置は、電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査するものである。
【0010】
また、この発明に係わる掘進機の障害物探査方法は、掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、
前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにしたものである。
【0011】
さらに、この発明に係わる掘進機の障害物探査方法は、掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにしたものである。
【発明の効果】
【0012】
この発明の掘進機の障害物探査装置及び掘進機の障害物探査方法によれば、水分の多い土質や地下水位に影響が少なく、金属製障害物と玉石,礫とを区別して、金属製障害物の探査が可能であり、推進工法やシールド工法の小口径から大口径の掘進機に適用可能である掘進機の障害物探査装置及び掘進機の障害物探査方法を得ることができる。さらに、電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込んだので、受信コイルの出力の減衰を抑えることができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1における掘進機の障害物探査装置を示す構成図である。
【図2】実施の形態1の掘進機の障害物探査装置における回路部を示すブロック構成図である。
【図3】この発明の原理を説明する説明図である。
【図4】実施の形態1における電磁波送信装置の送信電流と送信磁場を示す波形図である。
【図5】実施の形態1における初期値の△φoを示す図である。
【図6】実施の形態1における掘削時の△φjを示す図である。
【図7】実施の形態2の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図である。
【図8】実施の形態3の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図である。
【発明を実施するための形態】
【0014】
実施の形態1.
図1はこの発明の実施の形態1における掘進機の障害物探査装置を示す構成図である。
1は掘進機で、前部に回転式のカッターヘッド2が備えられている。掘進機1の後方の発進立坑14に至るまでの掘削完了領域には、組み立てられ連結された後続管15が構築されている。3は掘進機1(の運転部)に設置された送信機で、交流100V電源13より電力が供給される。5は送信コイルで、掘進機1の先端部、例えば、鋼製の外筒の先端部の外周溝(環状溝)に、例えばエナメル線で10〜100ターンを巻回させ、送信機3の出力端に接続されている。送信コイル5は、発生させた電磁波であり、時間で変化する磁場(1次磁場)10を、切羽前方の地中に送信する。送信コイル5を埋め込み納めた環状溝の表面部は、エポキシ樹脂(非金属性の保護材)で被い固めて保護と防水を施している。送信機3と送信コイル5とで、電磁波送信装置を構成している。
【0015】
4は掘進機1(の運転部)に設置された受信機である。受信コイル6は、前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物9(例えば、H形鋼,鋼管,鋼矢板,鋼杭や大中口径水道鉄管等)による誘導磁場(2次磁場)11を受信し、その出力端を受信機4の入力端に接続して、受信コイル6の出力を、受信機4に入力する。12は電磁波を受けることによって生じる金属製障害物9(以下単に障害物9という)の誘導電流である。受信コイル6は、掘進機1の先端部、例えば、鋼製の外筒の外周もしくは内周の凹部又はカッターヘッド2後方の隔壁の凹部に埋め込まれ、凹部の表面部は、エポキシ樹脂(非金属性の保護材)で被い保護と防水を施している。受信機4と受信コイル6とで電磁波受信装置を構成している。
【0016】
7は掘進機1の外部に設置されたパーソナルコンピュータ(PC)(以下コンピュータと称す)で、入力端末を有し前記電磁波受信装置と接続され、前記電磁波受信装置で受信された電磁波の位相角における障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を有している。8はコンピュータ7に接続され、位相変化解析装置の解析結果が表示されるモニタである。受信コイルは、受信センサであり、受信コイルのほか、磁気センサやホール素子でもよい。なお、電磁波送信装置の送信磁場又は送信電流の情報をコンピュータ7に取込む必要があるときは、送信機3からA/D変換器を介して送信機3とコンピュータ7が接続される。
【0017】
図2は実施の形態1の掘進機の障害物探査装置における回路部を示すブロック構成図である。図1の構成図より回路部を取り出してより詳しく説明する図である。なお、各図中の同一符号は同一又は相当部分を示し、以下同様である。送信機3は電源13に接続された周波数発生装置21とこれに接続された送信波増幅器22で構成されており、送信波増幅器22は送信コイル5に接続されている。
【0018】
周波数発生装置21は、100Hz〜100kHzの低周波数の交流を用いている。周波数が100Hz以下になると、誘導磁場(2次磁場)11が発生しにくくなる。理論的には送信磁場(1次磁場)10によって障害物9に発生する誘導起電力は送信磁場10の時間tによる微分で求められ、計算の結果、誘導起電力の強度は周波数に比例する。そのため、誘導磁場(2次磁場)11の強度も必然的に周波数に比例する。周波数が100kHz以上になると、地中の電磁波の透過性が悪くなる。地中に水など電気抵抗の低い物質が多くなればより電磁波の透過性が悪くなる。このため、周波数発生装置21の周波数(送信周波数)は1000Hz〜50kHzの周波数を使うのが効率的であり、1000Hz〜3800Hzを使用するのがさらに望ましい。
【0019】
受信機4は、受信コイル6に接続された受信フィルタ23と、これに接続されたA/D変換器24で構成されており、A/D変換器24はコンピュータ7に接続されている。なお、受信フィルタ23の前段に増幅器を接続しておいてもよい。コンピュータ7はA/D変換器24を介して受け取った計測データを解析する(後述)ことで、切羽前方(カッターヘッド前方)の障害物の存在の有無を判定する。また必要により、コンピュータ7には、カッターヘッド2の回転信号や掘進機1の速度等の掘進データを含む掘進機1の動作情報が、掘進機1の運転制御器から入力されて、A/D変換器24からの計測データの位相変化解析結果と前記掘進機1の動作情報とを統合して解析することによって、切羽前方の障害の位置・方向を推定し、その推定した位置をモニタ8上に表示するとよい。受信コイル6は、互いに離間して複数個設けてもよい(実施の形態2,3)。例えば、掘進機1の外筒の外周もしくは内周の凹部を、180°隔てて設けて、2個の受信コイル6を埋め込んで設置する。2個の受信コイル6をそれぞれ受信機4に時分割的に切替接続して受信する。受信コイル6を4個設置するときは、90°隔てて設けるとよい。
【0020】
次に誘導磁場を分離する解析方法について説明する。図3はこの発明の原理を説明する説明図である。
1.基礎となる原理:
送信コイル5より発生させた送信磁場10は、障害物9に誘導磁場11を、以下の順に引き起こさせる。
時間で変化する磁場10(送信磁場) → 障害物9に誘導起電力が発生する。→ 障害物9に誘導電流12が流れる。 → 誘導電流12により誘導磁場11が発生する。
【0021】
このとき、各現象の数式は次のようになる。
送信機3の送信電流: Icos(ωt)
(I:電流,ω:角周波数,t:時間),(ω=2πf f:周波数[Hz])
送信磁場10: H1cos(ωt) [ビオ・サバールの法則]
{H1:磁場(磁界)}
誘導起電力に関する項: ―△φ/△t=ωμoSH1sin(ωt)
(φ(磁束)=μoSH1,μo:真空の透磁率,S:面積)
[ファラデーの法則]
誘導電流12に関する項: σωH1sin(ωt) [オームの法則]
{σ:障害物9の導電率(比抵抗の逆数)}
誘導磁場11: σωH2sin(ωt) [ビオ・サバールの法則]
{H2:磁場(磁界)}
受信波形: 受信波形は送信磁場10と誘導磁場11の合成波形である。ただし、送信磁場10はcos(ωt)、誘導磁場11はsin(ωt)の波でありフーリエ解析により分離できる。
【0022】
障害物9により発生した誘導磁場11を電磁波受信装置で捉えることにより障害物9の有無が分かる。また、複数の受信コイル6を用いれば、それら受信コイル6の出力(位相)の差により、障害物9の存在方向が解る。障害物9を事前に感知することにより、事故を未然に防ぐことができる。
【0023】
2.実際の探査方法:
実際には、受信コイル6により受信した電磁波(誘導磁場11)は、(a)障害物9の誘導磁場11、(b)送信した磁場10、そして(c)マシンや周辺の地盤による誘導磁場からなる。これら3種(a〜c)の混ざり合った磁場の中から(a)障害物9の誘導磁場11のみを抽出する方法を以下に述べる。
(1)事前に障害物9のない位置で初期値となる磁場(d)を測定する。この初期値となる磁場(d)は、(b)と(c)の混合した磁場である。
(2)次に、掘削中に磁場を測定する。障害物9が前方に存在する位置に来ると、初期値の磁場(d)に(a)障害物9の誘導磁場が加算される。
(3)(a)を分離し障害物を見分ける。この見分けは、例えば、位相差(位相角差)で行う。
【0024】
図によって、位相差(位相角差)を表してみる。図4は実施の形態1における電磁波送信装置の送信電流と送信磁場を示す波形図である。31は送信電流波形又は送信磁場波形を示す。図5は実施の形態1における初期値の△φoを示す図である。41(10)は送信磁場波形である。なお、( )で示す符号は、他の図で用いた相当する符号を示す。以下同じである。42はマシンによる誘導磁場波形、43は周辺の地盤による誘導磁場波形、44は初期値となる測定磁場波形、45は電流値位相ずれ補正角を示す。図6は実施の形態1における掘削時の△φjを示す図である。51(10)は送信磁場波形、52(11)は障害物による誘導磁場波形hcj=rcj・sin(ωt-φcj)、53は掘削時の測定磁場波形、54は電流値位相ずれ補正角を示す。
【0025】
3.解析方法:
(1)送信機3から流す送信電流をIcjとする。ここでIcjはjの測定を行った時の電流値を意味する。
Icj=Scj・cos(ωt-φcj)
ここで、Scj:電流強度、t:時間[sec]、ω:角周波数(=2πf) f:周波数[Hz]
φcj:位相角[°]
次にIcjによって発生する送信磁場10をHcjとすると、
Hcj=Rcj・cos(ωt-φcj)
ここで、Rcj:磁場強度であり、送信機3から流す電流と同相である。
(2)初期値となる測定磁場をHoとする。
Ho=Ro・cos(ωt-φo)
ここで、Ro:磁場強度、φo:位相角[°]
(3)掘削時の測定磁場をHjとする。
Hj=Rj・cos(ωt-φj)
ここで、Rj:磁場強度、φj:位相角[°]
このように、初期値(例えば、障害物が無い時)と掘削時(例えば、障害物が有る時)とで、位相角に違いが生じるので、電磁波受信装置で受信された電磁波(測定磁場)の位相角における障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を備えたことにより、障害物を探査することができる。
【0026】
実際的には、より正確度を上げるために、
(4)(*1計算)により、以下の各位相角の値を計算する。
電流値位相ずれ補正:
△φo=φo-φco
△φj=φj-φcj
ここで、φco:送信機3から流す初期値の電流をIcoとすると、
Ico=Sco・cos(ωt-φco)、送信磁場Hco=Rco・cos(ωt-φco)となるが、その時の位相角[°]である。
初期値補正:
△φoj=△φj-△φo
△φojは、障害物9が存在した場合、誘導磁場11のためにある値を示す。逆に、障害物9がなければ△φoj≒0となる。
この△φojの値を、数値、あるいは図化することにより障害物の有無を探査する。
【0027】
(*1計算)
一般式として、H:磁場、R:受信磁場強度、φ:位相角とする。
H=Rcos(ωt-φ)
H=R(cos(φ)cos(ωt) + sin(φ)sin(ωt))
フーリエ解析を用いて、
cos(ωt)の項を取り出すと、A=Rcos(φ)
sin(ωt)の項を取り出すと、B=Rsin(φ)
B/A=(Rsin(φ))/(Rcos(φ))
B/A=tan(φ)
∴ φ=tan-1(B/A)
【0028】
つまり、
初期値の△φo=初期の受信コイルによる測定磁場の位相角―初期の送信磁場(又は送信電流)の位相角
掘削時の△φj=掘削時の受信コイルによる測定磁場の位相角―掘削時の送信磁場(又は送信電流)の位相角
位相角差の差△φoj=掘削時の△φj―初期値の△φoが障害物9が存在した場合、誘導磁場11のためにある値を示す。逆に、障害物9がなければ△φoj≒0となる。
【0029】
このように、電磁波受信装置で受信された電磁波(測定磁場)の位相角と、電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、障害物が有るときと無いときの位相角差の差の変化を解析する位相変化解析装置を備えたことにより、障害物をより正確に探査することができる。
【0030】
実測結果では、送信機3の周波数発生装置21の周波数(送信電流の周波数)が、2000Hzで、初期値の△φo=5.013°であり、切羽前方2mの位置の障害物を感知したときの掘削時の△φj=5.224°であった。そのため、位相角差の差△φoj=△φj-△φo=5.224°−5.013°=0.211°となった。実測結果では、インピーダンス解析より遠く、例えば2m程度で、障害物を検知できた。このように、インピーダンス解析より遠くの障害物を検知できる掘進機の障害物探査装置及び掘進機の障害物探査方法を得ることができる。
【0031】
実施の形態2.
図7は実施の形態2の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図で、その(a)は全体構成図、その(b)はカッターヘッド側から掘進機を見たときの側面図である。受信コイル6は、外筒17のカッターヘッド2側縁部における外周に穿設した凹部18に埋設して設置されている。受信コイル6の端子は外筒17の凹部18から内部(運転部)に引き込まれて受信機4に接続されている。受信コイル6を埋め込んだ凹部18の表面部はエポキシ樹脂で被われて保護と防水が施されている。
【0032】
外筒17の凹部18に埋め込んだ受信コイル6は、1個で、図7で示す2個の凹部18のどちらか1個だけでもよいが、実施の形態2では、図7に示すように、外筒17の凹部18は、外周上で180°離間させて2個設けられ、それぞれに受信コイル6が設置され、2個の受信機コイル6がそれぞれ受信機4に接続される。2個の受信機コイル6と受信機4との接続は時分割的に切替接続されるようにするとよい。同様に、外筒17の凹部18は、外周上で90°離間させて4個設けられ、それぞれに受信コイル6が設置され、4個の受信機コイル6がそれぞれ受信機4に時分割的に切替接続されるようにしてもよい。
他の回路,構成や構造及び動作は実施の形態1と同様である。
【0033】
受信コイル6を複数個設けることにより、障害物に接近した受信コイル6は、他のものと比較して、障害物の応答である位相角差の差(△φoj)が大きくなる。その結果、掘削中の掘進機1に4個の受信コイルを上下左右に設けた場合、上前方、下前方、左前方、あるいは右前方のいずれに障害物が接近してきているかを示す障害物存在方向を明らかにすることができる。
【0034】
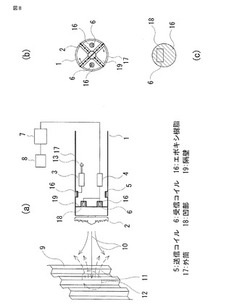
実施の形態3.
図8は実施の形態3の掘進機の障害物探査装置における受信コイルの設置位置を示す構成図で、その(a)は全体構成図、その(b)はカッターヘッド側から掘進機を見たときの側面図、その(c)は、(b)の受信コイルの埋め込み凹部の拡大図である。受信コイル6は、カッターヘッド2の即後方の隔壁19で、カッターヘッド2側から設けた凹部18に埋設して設置されている。受信コイル6を埋め込んだ隔壁19の凹部18の表面部(カッターヘッド2側からみた表面部)はエポキシ樹脂16で被われて保護と防水が施されている。受信コイル6の端子は隔壁19の凹部18から内部(運転部)に引き込まれて受信機4に接続されている。凹部18のカッターヘッド2側からみた形状は、例えば円形であり、凹部18の深さ方向の形状は軸心がある円柱状穴である。受信コイル6は円柱状穴の軸心を外しして設置されている。つまり、受信コイル6(受信センサ)の設置位置は、隔壁19に設けた軸心を有する凹部空間内であって、前記凹部空間の軸心位置からずらせて設置されている。他の回路,構成や構造及び動作は実施の形態1と同様である。
【0035】
受信コイル6を凹部空間の軸心位置からずらせて設置すると、受信コイル6を取り囲む金属部分に対して非対称、すなわち円柱状穴であれば軸心位置を避けた位置に設置し、障害物からの誘導磁場を、受信コイル6の周囲の金属に生じた打消し磁場で消失させず受信できるようにする。これにより、受信コイル6の出力の減衰を抑えることができる。
【符号の説明】
【0036】
1 掘進機 2 カッターヘッド
3 送信機 4 受信機
5 送信コイル 6 受信コイル
7 コンピュータ 8 モニタ
9 障害物 10 送信磁場(1次磁場)
11 誘導磁場(2次磁場) 12 誘導電流
13 電源 14 発進立坑
15 後続管 16 エポキシ樹脂
17 外筒 18 凹部
19 隔壁 21 周波数発生装置
22 送信波増幅器 23 受信フィルタ
24 A/D変換器
【特許請求の範囲】
【請求項1】
電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、
前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査する掘進機の障害物探査装置。
【請求項2】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化をフーリエ解析を用いて算出する請求項1記載の掘進機の障害物探査装置。
【請求項3】
電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、
前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査する掘進機の障害物探査装置。
【請求項4】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差をフーリェ解析を用いて算出し、算出した位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する請求項3記載の掘進機の障害物探査装置。
【請求項5】
前記電磁波送信装置における送信コイルは、前記掘進機の外筒の外周溝に巻回され埋め込まれている請求項1〜請求項4のいずれか1項に記載の掘削機の障害物探査装置。
【請求項6】
掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、
前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにした掘進機の障害物探査方法。
【請求項7】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化をフーリエ解析を用いて算出する請求項6記載の掘進機の障害物探査方法。
【請求項8】
掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、
前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにした掘進機の障害物探査方法。
【請求項9】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差をフーリェ解析を用いて算出し、算出した位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する請求項8記載の掘進機の障害物探査方法。
【請求項1】
電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、
前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査する掘進機の障害物探査装置。
【請求項2】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化をフーリエ解析を用いて算出する請求項1記載の掘進機の障害物探査装置。
【請求項3】
電磁波であり時間で変化する磁場を地中に送信させる電磁波送信装置と、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を受信する電磁波受信装置とを掘進機に設置し、
前記電磁波受信装置における受信センサの設置位置は、カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する位相変化解析装置を備え、金属製障害物の有無を探査する掘進機の障害物探査装置。
【請求項4】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差をフーリェ解析を用いて算出し、算出した位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する請求項3記載の掘進機の障害物探査装置。
【請求項5】
前記電磁波送信装置における送信コイルは、前記掘進機の外筒の外周溝に巻回され埋め込まれている請求項1〜請求項4のいずれか1項に記載の掘削機の障害物探査装置。
【請求項6】
掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、
前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにした掘進機の障害物探査方法。
【請求項7】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角における金属製障害物が有るときと無いときの位相角差の変化をフーリエ解析を用いて算出する請求項6記載の掘進機の障害物探査方法。
【請求項8】
掘進機のカッターヘッドを回転させながら、掘進機に設置した電磁波送信装置より、電磁波であり時間で変化する磁場を地中に送信させ、
前記電磁波送信装置から送信され地中を伝搬した電磁波を受けることによって生じる金属製障害物による誘導磁場を、掘進機に設置した電磁波受信装置で受信し、
前記電磁波受信装置における受信センサの設置位置は、前記カッターヘッド後方の隔壁に設けた凹部空間内であって、前記凹部空間の軸心における軸心位置からずらせて設置して、前記受信センサを埋め込み、
前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を位相変化解析装置で解析し、金属製障害物の有無を探査するようにした掘進機の障害物探査方法。
【請求項9】
前記位相変化解析装置は、前記電磁波受信装置で受信された電磁波の位相角と、前記電磁波送信装置の送信磁場又は送信電流の位相角との位相角差をフーリェ解析を用いて算出し、算出した位相角差における、金属製障害物が有るときと無いときの位相角差の差の変化を解析する請求項8記載の掘進機の障害物探査方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−92531(P2013−92531A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−287017(P2012−287017)
【出願日】平成24年12月28日(2012.12.28)
【分割の表示】特願2011−126269(P2011−126269)の分割
【原出願日】平成23年6月6日(2011.6.6)
【出願人】(506292262)ヤスダエンジニアリング株式会社 (8)
【出願人】(511137046)有限会社ネオサイエンス (2)
【出願人】(505358679)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成24年12月28日(2012.12.28)
【分割の表示】特願2011−126269(P2011−126269)の分割
【原出願日】平成23年6月6日(2011.6.6)
【出願人】(506292262)ヤスダエンジニアリング株式会社 (8)
【出願人】(511137046)有限会社ネオサイエンス (2)
【出願人】(505358679)
【Fターム(参考)】
[ Back to top ]