
掘進機
【課題】掘削経路の途中でも、構成要素の一部を掘削経路中に残し、残りを掘削開始地点まで戻すこと。
【解決手段】筒体28に回転自在に連結された外周側カッタヘッド16を備えた固定要素12と、外筒18と駆動部本体20とカッタ駆動軸22と油圧モータ24および内周側カッタヘッド26を含む移動要素14とを互いに分離可能に構成し、トンネル内に障害物が存在するときには、移動要素14に対して、坑口側に引き戻す方向の力を作用させて、移動要素14を固定要素12から分離し、移動要素14を坑口側に引き戻すことで、カッタヘッド16の内側と筒体28内に、作業員が移動可能な空間部132が形成される。このため、作業員は、掘削開始地点の坑口から筒体32、28や空間部内を移動して、トンネル内の障害物を除去する作業を行うことができる。
【解決手段】筒体28に回転自在に連結された外周側カッタヘッド16を備えた固定要素12と、外筒18と駆動部本体20とカッタ駆動軸22と油圧モータ24および内周側カッタヘッド26を含む移動要素14とを互いに分離可能に構成し、トンネル内に障害物が存在するときには、移動要素14に対して、坑口側に引き戻す方向の力を作用させて、移動要素14を固定要素12から分離し、移動要素14を坑口側に引き戻すことで、カッタヘッド16の内側と筒体28内に、作業員が移動可能な空間部132が形成される。このため、作業員は、掘削開始地点の坑口から筒体32、28や空間部内を移動して、トンネル内の障害物を除去する作業を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、掘進機に係り、特に、カッタヘッドを回転及び移動させて、地中にトンネルを掘るための掘進機に関する。
【背景技術】
【0002】
従来、地中にヒューム管などを埋設するに際しては、例えば、掘削開始地点に竪坑を掘り、掘削開始地点の竪坑内に掘削装置(掘進機)を配置し、掘削開始地点の竪坑から掘削終了地点に向かって掘削装置を移動させながら、掘削装置先端のカッタヘッドで管路を掘削し、掘削された管路内にヒューム管などの施設管を順次施設することが行われている。
【0003】
この際、掘削終了地点の竪坑が狭小であっても、掘削装置が回収できるように、カッタヘッドを外掘削部と内掘削部に分けて構成するとともに、外掘削部と内掘削部とを互いに取り外し可能に連結し、掘削終了地点の竪坑で、外掘削部と内掘削部とを分離し、内掘削部を本体部とともに、各施設管内を通じて掘削開始地点の発進竪坑内へ撤去するようにしたものが提案されている(特許文献1参照)。
【0004】
しかし、特許文献1に記載されているものでは、掘削装置を回収するにも、掘削終了地点の竪坑内で作業員が外掘削部と内掘削部とを分離しなければならず、管路を掘削している途中では、作業員が外掘削部と内掘削部とを分離する作業ができないので、掘削装置を回収することはできない。このため、特許文献1に記載されているものでは、掘削作業に支障を来たす恐れがある。
【0005】
すなわち、管路などを掘削している過程では、岩盤や土質に応じてカッタヘッドを交換するために、あるいはカッタヘッドなどの修理や清掃のために、掘削装置や掘進機を発進竪坑側へ一旦戻すことが行われている。この場合、特許文献1に記載されているものでは、カッタヘッドの交換や修理などができないことになる。
【0006】
そこで、管路などを掘削している過程でも、掘削装置や掘進機を発進竪坑側へ一旦戻して、カッタヘッドの交換や修理などができるようにするために、スクリューコンベアの先端側に配置されたカッタヘッドの外径を拡大して、埋設管に対していくらかの余掘りができるように構成された掘進機として、カッタヘッドの外径を埋設管よりも縮小し、外径の縮小されたカッタヘッドを埋設管内を通して、スクリューコンベア等とともに発進竪坑側へ戻すようにしたものが提案されている(特許文献2参照)。
【0007】
【特許文献1】特開平3−267497号公報
【特許文献2】特開2001−73677号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、掘削開始地点と掘削終了地点とを結ぶトンネルを掘削するときに、その途中に障害物があって、掘進機では障害物を掘削できないときには、トンネルの途中に竪坑を構築し、竪坑からトンネル内に作業員が入って障害物を除去する必要がある。一方、トンネルの途中に竪坑を構築できないときには、掘進機を発進竪坑側へ戻すことが必要となる。後者の場合、従来技術のように、カッタヘッドの外径を縮小させる構成の掘進機では、カッタヘッドやスクリューコンベア等を全て発進竪坑側へ戻す必要がある。
【0009】
本発明は、前記従来技術の課題に鑑みて為されたものであり、その目的は、掘削経路の途中でも、構成要素の一部を掘削経路中に残し、残りを掘削開始地点まで戻すことができる掘進機を提供することにある。
【課題を解決するための手段】
【0010】
前記課題を解決するために、請求項1に係る掘進機は、掘削対象を掘削して地中に掘削経路を形成しながら移動する掘進機において、前記掘削経路中に配置された筒体に回転自在に固定された固定要素と、前記筒体内に移動可能に配置されて、前記固定要素に着脱自在に連結される移動要素とを備え、前記移動要素は、前記固定要素との連結時に、前記固定要素に回転力を付与して、前記固定要素とともに前記掘削対象を掘削し、前記固定要素から分離されたときには、前記固定要素の内側と前記筒体内に作業員が移動可能な空間部を形成してなる構成とした。
【0011】
(作用)掘進機を掘削経路の途中で掘削開始地点まで戻す必要が生じた場合、例えば、掘削経路中に障害物が存在する場合、移動要素に対して、固定要素から離れる方向の力(掘削開始地点の方向に引き戻す力)を作用させると、固定要素と移動要素との連結が解除され、固定要素を掘削経路中に残し、移動要素を掘削開始地点まで戻すことができる。この際、固定要素の内側と筒体内には、作業員が移動可能な空間部が形成されるので、作業員は、掘削開始地点から掘削経路および筒体内の空間部を通って、障害物の存在する部位まで移動することができるとともに、そこで障害物を除去することが可能になる。
【0012】
請求項2に係る掘進機は、請求項1に記載の掘進機において、前記固定要素は、環状に形成されて、その外周側が前記筒体の長手方向一端側に回転自在に連結され、回転力を受けて前記掘削対象を掘削する第1のカッタヘッドを備え、前記移動要素は、前記筒体内にその長手方向に沿って配置された外筒と、前記外筒内に配置された駆動部本体と、前記駆動部本体内に、その長手方向に沿って配置されたカッタ駆動軸と、前記駆動部本体に固定されて前記カッタ駆動軸を回転駆動する駆動源と、前記カッタ駆動軸の長手方向一端側に連結されて、前記カッタ駆動軸とともに回転して前記掘削対象を掘削する第2のカッタヘッドとを備え、前記第2のカッタヘッドは、前記第1のカッタヘッドの内周側に配置されて前記第1のカッタヘッドと着脱自在に連結され、前記第1のカッタヘッドとの連結時に、前記カッタ駆動軸の回転に伴う回転力を前記第1のカッタヘッドに伝達し、前記第1のカッタヘッドから分離されたときには、前記第1のカッタヘッドの内側に作業員が移動可能な空間部を形成してなる構成とした。
【0013】
(作用)移動要素に対して、固定要素から離れる方向の力(掘削開始地点の方向に引き戻す力)を作用させると、固定要素と移動要素との連結が解除され、固定要素を掘削経路中に残し、移動要素を掘削開始地点まで戻すことができる。すなわち、外筒を掘削開始地点の方向に移動させると、外筒の移動に伴って、駆動部本体とカッタ駆動軸および駆動源が移動するとともに、第2のカッタヘッドと第1のカッタヘッドとの連結が解除され、外筒と駆動部本体とカッタ駆動軸と駆動源および第2のカッタヘッドが移動要素として、掘削開始地点まで移動する。このとき、掘削経路中には、固定要素としての第1のカッタヘッドが残されるが、第1のカッタヘッドの内側と筒体内には、作業員が移動可能な空間部が形成される。これにより、作業員は、掘削開始地点から筒体内や空間部を通って、障害物の存在する部位まで移動することができるとともに、そこで障害物を除去することが可能になる。
【0014】
請求項3に係る掘進機においては、請求項2に記載の掘進機において、前記第1のカッタヘッドは、複数の補助固定要素で構成され、前記各補助固定要素は、前記第1のカッタヘッドの周方向において互いに着脱自在に連結されてなる構成とした。
【0015】
(作用)第1のカッタヘッドを複数の補助固定要素で構成し、各補助固定要素を第1のカッタヘッドの周方向において互いに着脱自在に連結するようにしたため、移動要素の回収時に、第1のカッタヘッドを複数の補助固定要素に分割して、掘削開始地点まで戻して回収することができる。また、狭小な到達竪坑でも、第1のカッタヘッドを複数の補助固定要素に分割して回収することができる。
【発明の効果】
【0016】
以上の説明から明らかなように、請求項1に係る掘進機によれば、固定要素を掘削経路中に残し、移動要素を掘削開始地点まで戻すことができ、この際、固定要素の内側と筒体内に、作業員が移動可能な空間部を形成することができる。
【0017】
請求項2によれば、固定要素として、第1のカッタヘッドを掘削経路中に残し、外筒と駆動部本体とカッタ駆動軸と駆動源および第2のカッタヘッドを含む移動要素を掘削開始地点まで戻すことができ、この際、第1のカッタヘッドの内側と筒体内に、作業員が移動可能な空間部を形成することができる。
【0018】
請求項3によれば、第1のカッタヘッドを複数の補助固定要素に分割して、掘削開始地点や到達竪坑で回収することができる。
【発明を実施するための最良の形態】
【0019】
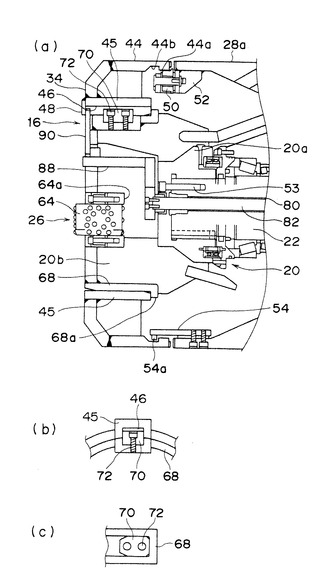
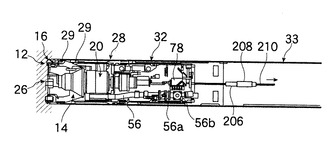
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明の一実施例を示す掘進機の正面図、図2は、掘進機の背面図、図3は、図1のA−A線に沿う掘進機の縦断面図、図4は、移動要素の回収時における外周側カッタヘッドの正面図、図5は、移動要素の回収時における内周側カッタヘッドの正面図、図6は、移動要素の回収時の状態を示す背面図、図7は、移動要素の回収時の状態を示す図であって、図4のB−B線に沿う掘進機の縦断面図、図8は、ガイドローラと外筒との関係を示す図であって、(a)は、ガイドローラの拡大正面図、(b)は、(a)のA−A線に沿う要部拡大断面図、図9(a)は、掘進機の要部拡大断面図、9(b)は、平行キーと回転ディスクとの関係を示す要部拡大断面図、図9(c)は、平行キーと回転ディスクとの関係を示す要部拡大平面図、図10は、カッタ位置検出部とガイドとの関係を示す要部断面図、図11は、ゲージケースとゲージロッドとの関係を示す図であって、(a)は、ゲージケースの平面図、(b)は、ゲージケースの断面図、(c)は、ゲージケースの正面図、図12は、外側カッタヘッドの他の実施例を示す図であって、(a)は、分割型カッタヘッドの分割前の状態を示す正面図、(b)は、分割型カッタヘッドの分割後の状態を示す正面図、(c)は、分割型カッタヘッドの要部断面図、図13は、掘進機の駆動を停止し、移動要素を回収する前の状態を示す図、図14は、バキュームホースを移動要素に接続した状態を示す図、図15は、シール蓋を撤去したときの状態を示す図、図16は、初期引き戻しの状態を示す図、図17は、初期引き戻しに用いた工具を撤去した後、ワイヤロープで移動要素を発進竪坑側へ引き出そうとする状態を示す図、図18は、回収用ウインチで移動要素を移動させるときの状態を示す図、図19は、継ぎ手板を筒体と後方架台用筒体に溶接で取り付けた状態を示す図、図20は、元押し装置と鞘管で移動要素を搬送するときの状態を示す図、図21は、移動要素直後に元押し装置の手元スイッチを持ち込んで移動要素の再設置作業をするときの状態を示す図、図22は、ストッパがガイドに突き当たるまで移動要素を搬送するときの状態を示す図、図23は、掘進機の搬送装置とストッパを撤去したときの状態を示す図、図24は、シール蓋を搬入している状態を示す図、図25は、反力受ジャッキを伸ばし、移動要素を、掘進を停止した位置まで押し込んだ状態を示す図、図26は、移動要素の設置後に、継ぎ手板を取り外した状態を示す図、図27は、移動要素の設置後に、機内機器を再設置した状態を示す図である。
【0020】
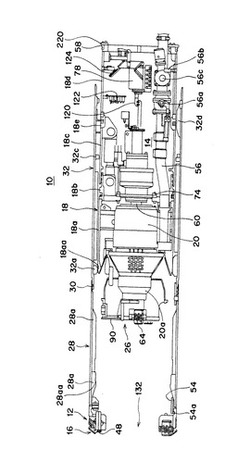
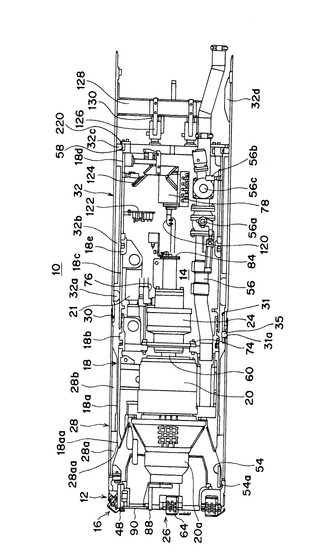
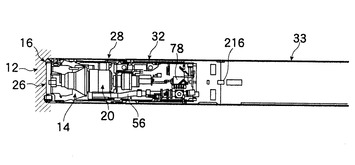
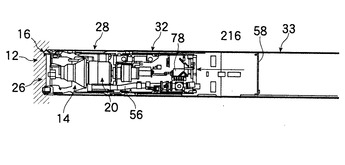
図1乃至図11において、掘進機10は、トンネル(掘削経路)内に固定される固定要素12と、固定要素に着脱自在に連結されてトンネル内に移動自在に配置される移動要素14を備えている。
【0021】
固定要素12は、カッタヘッド(第1のカッタヘッド)16を備え、移動要素14は、外筒18と、駆動部本体20と、カッタ駆動軸22と、油圧モータ(駆動源)24と、カッタヘッド(第2のカッタヘッド)26などを備えて構成されている。
【0022】
カッタヘッド16は、鋼製の筒などで構成された、円筒状の筒体28の長手方向一端側に回転自在に連結されている。筒体28の長手方向他端側の内側には、シールパッキン30を介して、円筒状の筒体32が挿入されている。シールパッキン30近傍の筒体32内壁面には、プレート31の一端側が溶着されており、このプレート31には、ピン挿通用長穴31aが形成されている。ピン挿通用長穴31aに相対向して、筒体28の内壁面には、ピン35が溶着されており、このピン35は、ピン挿通用穴31a内に挿通されている。
【0023】
筒体28と筒体32とをピン35を介して連結することで、掘進機10を再投入(再設置)する際に、ケーシング18aを筒体28に挿入する抵抗で、筒体28が筒体32から離れて前方へ移動するのを防止することができる。
【0024】
なお、筒体32には、トンネルの掘削に伴って、後方架台用筒体が差し込まれ、各後方架台用筒体は、筒体28、32とともに、トンネル内に配置されて固定される。
【0025】
筒体28の内側には、カッタヘッド16側に環状の嵌合部28aが形成され、嵌合部28aに隣接してレール状のガイド28bが形成されている。筒体32の内側には、筒体28側から、レール状のガイド32a、32b、環状のガイド32c、レール状のガイド32dが間隔を保って形成されている。
【0026】
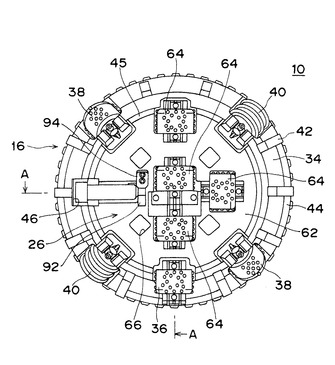
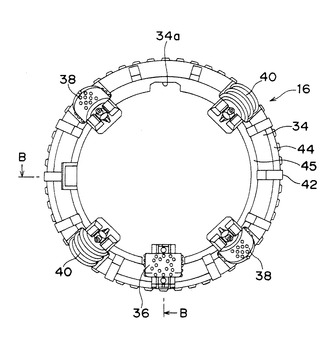
カッタヘッド16は、外周側カッタヘッドとして、図1と図4に示すように、円環状に形成された回転ディスク(外周ディスク)34と、回転ディスク34に固定された切削刃36および一対の切削刃38、40と、回転ディスク34に形成された複数個の土砂取り込みスクレーパ42を備えて構成されている。
【0027】
切削刃36は、インナービットとしてボタン型ローラービットで構成されて、回転ディスク34に固定されている。各切削刃38は、ボタン型ローラービットで構成されて、回転ディスク34の仮想の回転中心を間にして、相対向して回転ディスク34に固定されている。各切削刃40は、ディスク型ローラービットで構成されて、回転ディスク34の仮想の回転中心を間にして、相対向して回転ディスク34に固定されている。
【0028】
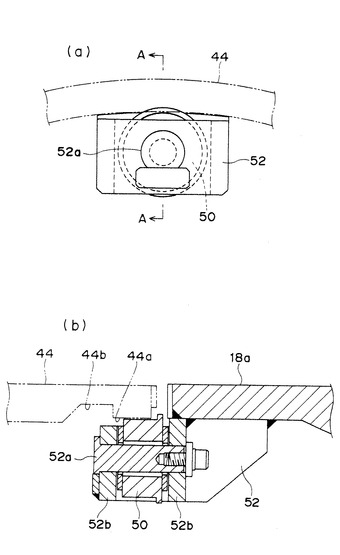
回転ディスク34の外周側には、筒状のフランジ44が一体に形成されており、フランジ44先端内周側には、環状の摺動部44aを残して環状の凹部44bが形成されている(図8参照)。摺動部44aは、3個のガイドローラ50の摺動路として各ガイドローラ50に当接されている。
【0029】
各ガイドローラ50は、3個の支持板52の固定軸52aにそれぞれ回転自在に支持されている。各支持板52は、筒体28の嵌合部28aの内周壁に円周方向おいて一定の間隔を保って固定されている。各支持板52には、一対の突起52bが相対向して形成され、各突起52bに固定軸52aが固定されている。固定軸52aには、ガイドローラ50が回転自在に装着されている。すなわち、カッタヘッド16は、フランジ44がガイドローラ50を介して、筒体28に回転自在に支持されている。
【0030】
各支持板52近傍には、図9に示すように、それぞれカッタ押え54が配置されており、各カッタ押え54は、筒体28の嵌合部28a内周壁に固定されている。各カッタ押え54の先端側には、突起54aが形成されている。各突起54aは、フランジ44の凹部44b内に挿入されている。すなわち、筒体28に固定されたカッタ押え54により、外周側カッタヘッド16の抜けが防止されるようになっている。
【0031】
また、回転ディスク34の内周側には筒状のフランジ45が形成されており、フランジ45の一部には、キー溝46が回転ディスク34の径方向と直交する方向(フランジ44の長手方向)に沿って形成され、キー溝46の端部には、キー溝46の側壁として位置検出部用ストッパ48が形成されている(図1と図9参照)。そして、回転ディスク34の内周側の領域は、作業員が移動可能な空間部として形成されている。
【0032】
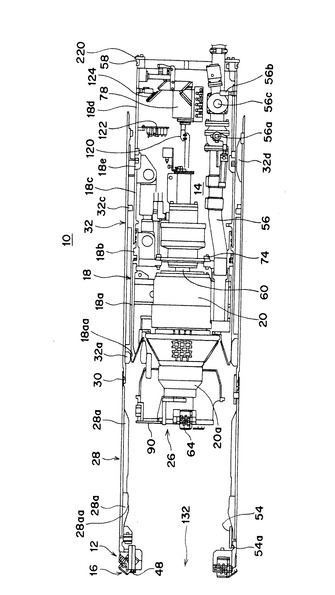
一方、移動要素14の外筒18は、円筒状に形成されたケーシング18a、18b、18c、18dを備えており(図3参照)、ケーシング18aの内周壁には、駆動部本体20が固定され、ケーシング18b、18c、18dの内側には、送泥管56(送泥管56と対となる排泥管は図示せず)などが配置されている。
【0033】
ケーシング18aとケーシング18bは、互いに連結され、ケーシング18bとケーシング18cは、方向修正ジャッキ21を介して連結されている。ケーシング18bとケーシング18dは、方向修正ジャッキ21、ケーシング18cを介して連結されている。ケーシング18aの長手方向一端側には駆動部本体20が連結されている。ケーシング18cとケーシング18dは、連結部18eを介して互いに連結され、ケーシング18dの長手方向一端側にはシール蓋58が固定されている。また、ケーシング18aの長手方向一端側(先端側)には、筒体28の嵌合部28aに形成された段差部28aaと当接可能な段差部18aaが形成されている。段差部28aaと段差部18aaが互いに当接した際には、ケーシング18aと筒体28は、ケーシング18aの長手方向一端側(先端側)の外周面と筒体28の嵌合部28aの内周面が印籠結合される。
【0034】
駆動部本体20は、略円柱状に形成されて外筒18の長手方向に沿って配置され、ケーシング18aに固定されている。駆動部本体20には、駆動部本体20の中心部を貫く軸状部材としてのカッタ駆動軸22が回転自在に挿入されている(図3、図9参照)。カッタ駆動軸22は、長手方向(軸方向)の一端側が駆動部本体20のボス部20aに連結され、長手方向の他端側が油圧モータ24のモータ駆動軸60に連結されている。ボス部20aは、内周側カッタヘッド26に連結されている。
【0035】
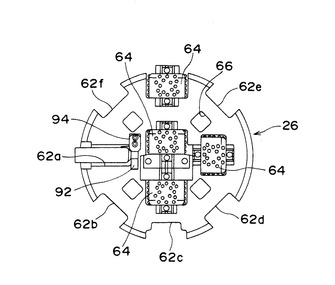
内周側カッタヘッド26は、図1と図5に示すように、円盤状の回転ディスク(内周ディスク)62と、4個の切削刃64等を備え、各切削刃64は、ボタン型ローラービットで構成されている。切削刃64のうち一個は、回転ディスク62の中心部近傍に固定され、他の2個は、回転ディスク62の中間部に固定され、残りの1個は、回転ディスク62の外周部に固定されている。回転ディスク62は、作業員が移動可能な空間部に対応した大きさに形成されており、回転ディスク62の外周側には、複数の凹部62a〜62fが形成されている。
【0036】
凹部62aは、外周側カッタヘッド16のキー溝46に対応して形成されている。凹部62bは、外周側カッタヘッド16の一方の切削刃40の先端部が挿入可能に形成され、凹部62cは、外周側カッタヘッド16の切削刃36の先端部が挿入可能に形成され、凹部62dは、外周側カッタヘッド16の一方の切削刃38の先端部が挿入可能に形成されている。
【0037】
同様に、凹部62eは、外周側カッタヘッド16の他方の切削刃40の先端部が挿入可能に形成され、凹部62fは、外周側カッタヘッド16の他方の切削刃38の先端部が挿入可能に形成されている。なお、外側の切削刃64は、その先端部が、外側カッタヘッド16の凹部34a内に挿入可能に形成されている。
【0038】
また、回転ディスク62には、4個の窓66が周方向に沿って分散して形成されている。回転ディスク62の各窓66より内周側には、駆動部本体20のリブ20bが一体となって溶着されている(図9参照)。リブ20bは、ボス部20aに溶着されている。
【0039】
すなわち、回転ディスク62は、リブ20bとボス部20aが溶接によって固着されて一体化され、リブ20b、ボス部20aを介してカッタ駆動軸22に連結されている。
【0040】
また、回転ディスク62の各窓66より外周側には、フランジ68が一体となって形成されている(図9参照)。フランジ68の外周側には、挿入組み込み可能な平行キー70が装着されている。平行キー70はボルト72によってフランジ68に固定されている。平行キー70は、外周側回転ディスク34のフランジ45に形成されたキー溝46に嵌合されている。
【0041】
すなわち、内周側回転ディスク62は、平行キー70とキー溝46を介して外周側回転ディスク34と着脱自在に連結されている。このため、外周側回転ディスク34には、油圧モータ24からの回転力(駆動力)がモータ駆動軸60、カッタ駆動軸22、ボス部20a、リブ20b、内周側回転ディスク62を介して伝達される。
【0042】
また、外周側回転ディスク34は、フランジ45の端部が、内周側回転ディスク62のフランジ68の長手方向端部に形成された、ストッパとしての凸部68aに当接するので、外周側カッタヘッド16に加わる掘削時の軸方向(長手方向)の力を内周側カッタヘッド26に伝達することができる。
【0043】
油圧モータ24は、図3に示すように、ボルトを含む固定部材74を介してケーシング18bに固定されており、油圧モータ24には、正回転用と逆回転用およびドレン用の3本の油圧ホース76が連結されている。各油圧ホース76は、坑外に設置される油圧制御ユニット(図示せず)に接続されている。油圧モータ24は、油圧制御ユニットの制御に従った油圧に応答して、モータ駆動軸60を正回転または逆回転するようになっている。
【0044】
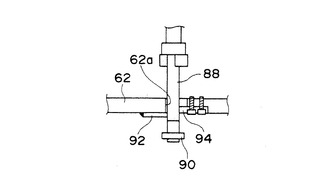
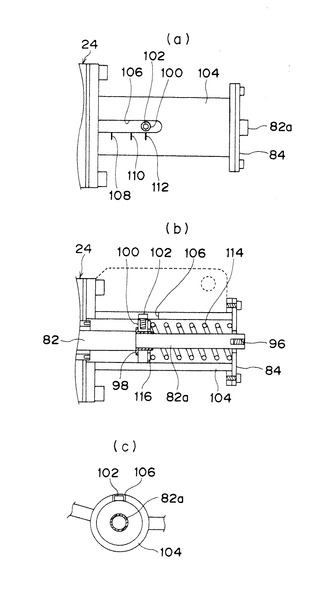
カッタ駆動軸22には、その中心部を貫く貫通孔80が長手方向に沿って形成されており(図9参照)、貫通孔80には、円柱状のゲージロッド82が摺動自在に挿入されている。ゲージロッド82は、カッタ駆動軸22と、油圧モータ24およびエンドブラケット84に亘って配置されている。
【0045】
ゲージロッド82の長手方向一端側には、L字型に形成された支持ロッド88が連結されており、支持ロッド88の先端側には、支持ロッド88に直交してカッタ位置検出部90が固定されている。カッタ位置検出部90は、外周側回転ディスク34のキー溝46に挿入可能に形成され、支持ロッド88は、内周側回転ディスク62の凹部62aに挿入可能に形成されている。内周側回転ディスク62の凹部62a近傍には、図10に示すように、支持ロッド88の移動をガイドするガイド部材92、94が固定されている。
【0046】
一方、ゲージロッド82の長手方向他端側には、図11に示すように、小径部82aが形成されている。小径部82aの長手方向端部には、手押し治具挿入用の穴96が形成され、小径部82aの長手方向端部外周には、滑り軸受98が固定されている。滑り軸受98外周には位置決めゲージ100が固定され、位置決めゲージ100には、六角穴付きボルト102が固定されている。六角穴付きボルト102は、ゲージケース104の溝106内に挿入されて、位置決めゲージ100の回り止めと指針を兼用するようになっている。ゲージケース104の溝106の縁には、位置決めゲージ100の位置を読み取るための目盛として、位置決め完了目盛108、位置決め開始目盛110、カッタ装着完了目盛112が付けられている。
【0047】
また、小径部82aの外周側には、圧縮されたばね114が装着されている。ばね114は、長手方向一端側が調圧スペーサ116を介して位置決めゲージ100に支持され、長手方向他端側がエンドブラケット84に支持され、蓄積された弾性力(ばね力)により、ゲージロッド82をカッタヘッド26側に付勢するようになっている。なお、ばね114の弾性力は、調圧スペーサ116の厚みを変えることで調整できるようになっている。
【0048】
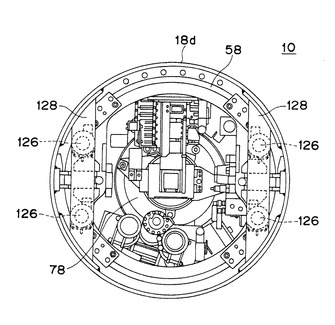
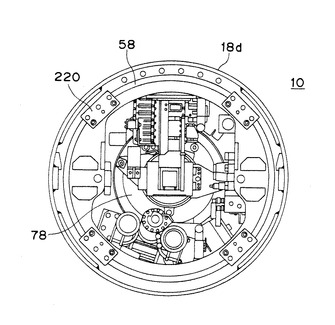
また、油圧バルブユニット78は、油圧ポンプユニット200(図13参照)から油圧の供給を受けて、方向修正ジャッキ21、止水弁56a、バイパス弁56cを制御する。油圧バルブユニット78近傍には、図3に示すように、反射鏡120が配置され、油圧バルブユニット78の周囲には、メータパネル122、レーザ反射装置124が配置されている。
【0049】
反射鏡120は、推進計画線から掘進機10先端中心までの距離(変位)をメータパネル122の目盛板に表示するために、掘進機10の外筒18のうち屈曲部より前となる、ケーシング18bに油圧モータ24を介して固定されている。
メータパネル122は、反射鏡120に相対向して、ケーシング18dに固定されており、このメータパネル122には、掘進機10を制御するための計器類、例えば、油圧圧力計、ストローク計、表示灯等が配置されているとともに、推進計画線から掘進機10先端中心までの距離(変位)を表示するための目盛板等が配置されている。
【0050】
レーザ反射装置124は、2枚のミラーと2枚のビームスプリッタを組み合わせて構成され、推進計画線から掘進機10先端中心までの距離(変位)とレーザ反射装置124付近における推進計画線と掘進機10後端側の外筒18の中心までの距離(変位)をメータパネル122の目盛板に表示することができる。
【0051】
推進計画線から掘進機10先端中心までの距離(変位)とレーザ反射装置124付近における推進計画線と掘進機10後端側の外筒18の中心までの距離(変位)は、発進竪坑に設置されたレーザ発光器から推進計画線上に照射されるレーザ光線をレーザ反射装置124と反射鏡120で反射させて、その反射光をメータパネル122に照射したときに、メータパネル122の目盛板の中心からの変位として確認することができる。この際、掘進機10が推進計画線上にあれば、レーザ光線は目盛板の中心に照射される。
【0052】
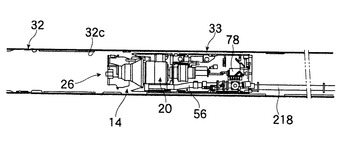
また、ケーシング18dの長手方向端部にはストッパ220が取り付けられており、ストッパ220の一部が筒体32のガイド32cの端部に押し当てられている。なお、ストッパ220は、初期引き戻し後に外すこともある。
【0053】
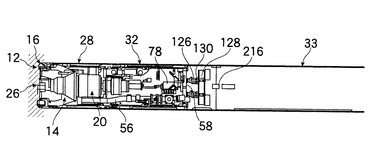
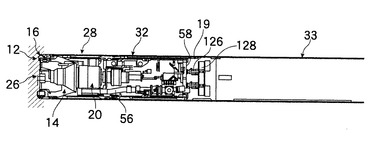
ケーシング18dの長手方向端部とガイド32cとの間には両者の間隙を閉塞するためのシール蓋58が配置されている。このシール蓋58は、外筒18のケーシング18dの長手方向端部に固定されて、ケーシング18dから脱落しないように、ストッパ220で支持されている。ケーシング18dの端面は4台の反力受ジャッキ126と当接して支持されている。各反力受ジャッキ126は、反力受128に固定されており、反力受128は、筒体32の内壁面に固定されている。そして、各反力受ジャッキ126と反力受128との間には、各反力受ジャッキ126のストロークが不足する場合、スペーサ130が挿入される。この際、筒体32に固定された反力受128は、掘進機10の駆動時に、掘進機10から各反力受ジャッキ126に作用する力を反力として受けて、掘進機10を保持するようになっている。
【0054】
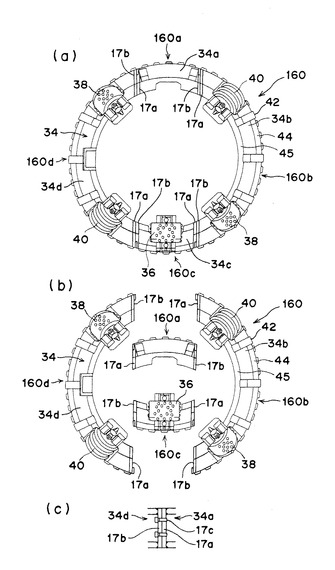
また、カッタヘッド16の代わりに、図12に示すように、分割型カッタヘッド160を用いることができる。分割型カッタヘッド160は、4つの補助固定要素160a、160b、160c、160dに分割可能に構成され、補助固定要素160a、160b、160c、160dを着脱自在に連結されている。
【0055】
この際、回転ディスク34をその周方向において、4つの要素34a、34b、34c、34dに分割し、分割された各要素34a〜34bの両端面にそれぞれプレート17a、17bを溶接し、相隣接するプレート17aとプレート17bを接続用ボルト17cで締結する。
【0056】
上記構成による掘進機10を用いて、地中に、掘削開始位置と掘削終了位置とを結ぶ掘削経路としてのトンネルを掘削するに際して、掘削開始位置の坑口に掘進機10を配置し、油圧モータ24を駆動するための作業を行う。
【0057】
まず、油圧モータ24を回転駆動するに先立って、送泥管56の止水弁56aを閉じるとともに、排泥管の止水弁を閉じ、バイパス弁56cを開き、送泥管56と排泥管をバイパス弁56cを連通させて、送泥管56と排泥管内に水を流し、流量と水圧を調整する。その後、送泥管56の止水弁56aを開くとともに、排泥管の止水弁を開き、バイパス弁56cを閉じる。
【0058】
この後、油圧モータ24を駆動すると、油圧モータ24の回転駆動により、油圧モータ24の回転力がモータ駆動軸60、カッタ駆動軸22を介して内周側カッタヘッド26に伝達され、内周側カッタヘッド26が回転するともに、内周側カッタヘッド26の回転力が外周側カッタヘッド16に伝達され、各カッタヘッド16、26の回転に伴って、切削刃36、38、40、64によって掘削対象が掘削され、地中にトンネルが形成される。
【0059】
ここで、地中にトンネルを掘削している過程で、掘進機10を掘削開始位置の坑口まで戻す必要が生じた場合、例えば、トンネルの途中に障害物が存在する場合、外周側カッタヘッド16と内周側カッタヘッド26との連結を解除するために、移動要素14に対して、移動要素14を坑口側へ引き戻す方向の力を作用させると、図7に示すように、図内周側回転ディスク62の平行キー70と外周側回転ディスク34のキー溝46との嵌合が解除され、外周側カッタヘッド16と内周側カッタヘッド26との連結が解除される(図4から図6参照)。
【0060】
すなわち、掘進機10は、トンネル(掘削経路)に配置された筒体28に回転自在に固定された固定要素12(カッタヘッド16)と、筒体28、32内に移動可能に配置された移動要素14(外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、内周側カッタヘッド26)とが分離(分解)可能に構成されているので、移動要素14に対して、移動要素14を坑口側に引き戻す方向の力を作用させることで、外周側カッタヘッド16と内周側カッタヘッド26との連結が解除され、移動要素14を坑口側へ移動させることができる。
【0061】
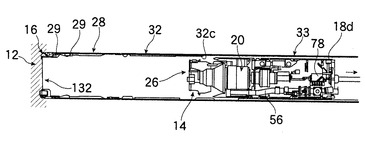
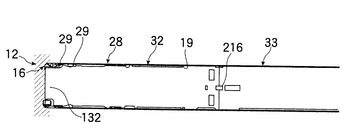
移動要素14を坑口側へ移動させると、図7に示すように、外側カッタヘッド16の内側と筒体28内には、作業員が移動可能な空間部132が形成されるので、作業員は、掘削開始地点の坑口から筒体33、32、28通って空間部132まで移動することができる。ここで、作業員は、空間部132から作業空間部などに移動して、障害物を除去する作業を行うことができる。
【0062】
障害物を除去する作業が終了し、作業員が、掘削開始地点の坑口側に戻ったときには、外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、および内周側カッタヘッド26を含む移動要素14を坑口側から、後方架台用筒体(図示せず)内に挿入し、移動要素14全体をトンネル先端側の所定位置まで移動させる。
【0063】
この際、作業員は、ケージロッド82の小径部82aに形成された穴96内に手押し治具(図示せず)の先端側を挿入し、手押し治具を介して、ゲージロッド82をカッタヘッド16側に押し出すと、ゲージロッド82の先端側が切削刃64の取り付け部64aに突き当たる。このとき、構造上、位置決めゲージ100は位置決め完了目盛108の位置となる(図11参照)。
【0064】
移動要素14全体を空間部の所定位置まで移動させたときには、ゲージロッド82のカッタ位置検出部90がカッタヘッド16の回転ディスク34に突き当たる。ここで、作業者は、位置決めゲージ100が位置決め開始目盛110の位置にあるか否かを確認する。位置決めゲージ100が位置決め開始目盛110の位置にあるときに、油圧モータ24を低速度で回転させながら、カッタ位置検出部90を回転ディスク34のキー溝46に挿入するための位置決めを行う。
【0065】
カッタ位置検出部90を回転ディスク34のキー溝46に挿入するための位置決めが行われると、支持ロッド88がガイド部材92、94にガイドされながらカッタヘッド16の先端側に移動するとともに、カッタ位置検出部90が回転ディスク34のキー溝46に沿ってカッタヘッド16の先端側に移動する(図9と図10参照)。このとき、作業者は、位置決めゲージ100が位置決め完了目盛108の位置とあることを確認したときには、油圧モータ24の駆動を停止する。これにより、カッタヘッド16とカッタヘッド26との位置決めが完了する。
【0066】
この後、外筒18や駆動部本体20を含む移動要素14全体をトンネルの壁面に向けて移動させると、内周側回転ディスク62の平行キー70と外周側回転ディスク34のキー溝46とが嵌合し、外周側カッタヘッド16と内周側カッタヘッド26が回転ディスク62と回転ディスク34を介して互いに連結される。このとき、カッタ位置検出部90がキー溝46の端部に形成されたストッパ48に当接し、カッタ位置検出部90の移動が阻止され、位置決めゲージ100がカッタ装着完了目盛112の位置となる。
【0067】
これにより、作業員は、外周側カッタヘッド16と内周側カッタヘッド26が再び連結され、移動要素14全体の移動が完了したことを位置決めゲージ100で確認することができる。移動要素14が固定要素12に連結されることで、掘進機10が復元されたことになる。
【0068】
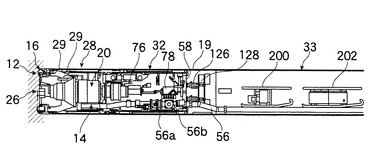
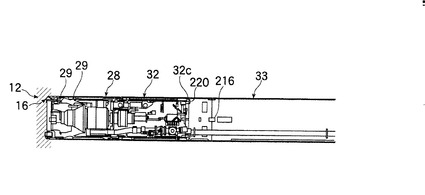
次に、掘進機10の移動要素14の回収作業を図13から図18に基づいて説明する。まず、図13に示すように、推進終了後、機内止水弁56aを閉じるとともに、掘進機動力電源、操作電源をオフとし、筒体28、32の内周側に固定されている止水材注入ホース19に止水材(薬液)を注入し、筒体28先端側の注入口29から筒体28外側の地盤に向けて止水材(薬液)を注入する。すなわち、地下水位下で掘進機10の移動要素14を回収する場合、筒体28、32外側の地盤からの地下水が掘進機10内に浸入する恐れがあるので、掘進機10の移動要素14を回収する前に、止水処理として、筒体28先端側の注入口29から筒体28外側の地盤に向けて止水材(薬液)を注入することとしている。
【0069】
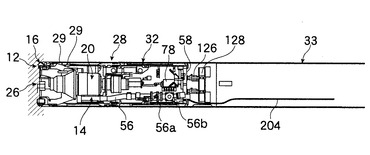
次に、送泥管56、排泥管(図示せず)、電気ケーブル(図示せず)、制御用油圧ホース76、後方架台用筒体33内の油圧ポンプユニット200と機内制御盤202を撤去する。この後、図14に示すように、泥水抜きバルブ56bにバキュームホース204を取り付ける。次に、バキュームホース204に連結されたバキュームポンプ(図示せず)の作動により、筒体28、32と掘進機10間の泥水をバキュームホース204を介して排出する。
【0070】
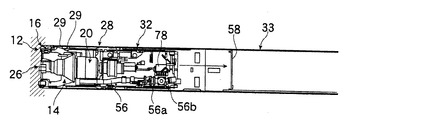
この後は、図15に示すように、反力受128と各反力受ジャッキ126を取り外し、その後、ケーシング18dの長手方向端部とガイド32cとの間隙を閉塞するためのシール蓋58を撤去する。
【0071】
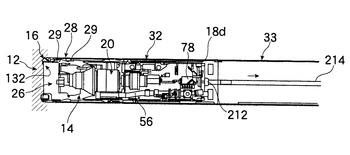
次に、図16に示すように、後方架台用筒体33に、一対の引き抜き治具206を固定し、各引き抜き治具206を手動センターホールジャッキ208に連結し、各手動センターホールジャッキ208に固定された引き抜き鋼棒210を坑口側へ引き戻す方向に操作して、掘進機10の移動要素14に対する初期引き戻しを行い、移動要素14を300mm程度引き戻す。
【0072】
次に、移動要素14を300mm程度引き戻し後は、図17に示すように、初期引き戻しに用いた工具を撤去する。この後、ケーシング18dにワイヤロープ用金具212を取り付け、ワイヤロープ用金具212にウインチワイヤロープ214を取り付け、ウインチワイヤロープ214に連結された回収用ウインチ(図示せず)の作動により、掘進機10の移動要素14を坑口側に引き戻す。
【0073】
回収用ウインチ(図示せず)の作動により、掘進機10の移動要素14が坑口側に移動する過程では、図18に示すように、掘進機10の移動要素14は、筒体32のガイド32cをそのまま通過して、筒体32から抜けて行く。
【0074】
外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、および内周側カッタヘッド26を含む移動要素14を坑口側に引き戻すと、図18において、移動要素14が除去された形態となって、外側カッタヘッド16の内側と筒体28内には、作業員が移動可能な空間部132が形成されるので、作業員は、掘削開始地点の坑口から筒体33、32、28通って空間部132まで移動することができる。ここで、作業員は、空間部132から作業空間部などに移動して、障害物を除去する作業を行うことができる。
【0075】
次に、掘進機10の移動要素14を再投入(再設置)するときの作用を図19から図27に基づいて説明する。
【0076】
トンネル内の障害物が除去された後、掘進機10の移動要素14をトンネル内に再投入するに際しては、図19に示すように、筒体28、32の内部に止水材注入ホース19を再配置し、止水材注入ホース19を筒体28、32の内部壁面にバインド線などで固定する。この後、掘進機10の移動要素14の再設置時に、移動要素14の押し込み抵抗で筒体32と後方架台用筒体33とが離れないようにするために、筒体32と後方架台用筒体33との境界部に継ぎ手板216を2個ピッチ溶接する。これは、継ぎ手板216がないと、移動要素14を筒体28、32に挿入する抵抗で筒体32が後方架台用筒体33から離れて前方へ移動してしまい、筒体28、32と移動要素14の固定が完全にできないためである。
【0077】
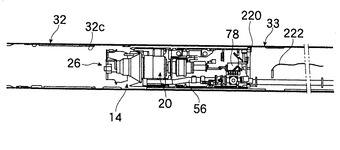
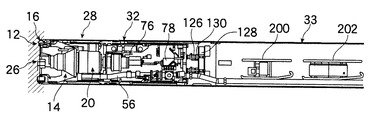
この後、トンネルの坑口側から掘進機10の移動要素14を挿入し、図20に示すように、ケーシング18dの長手方向端部に鞘管(搬送装置)218を連結するとともに、鞘管218に連結された元押し装置(図示せず)を坑外で操作し、元押し装置の駆動により、鞘管218とともに、移動要素14を筒体32のガイド32c近傍まで搬送する。
【0078】
次に、図21に示すように、ケーシング18dの長手方向端部に、ケーシング18dから外側に僅かに突出するように、ストッパ220を取り付け、元押し装置の操作を手元スイッチ222に切り替える。すなわち、移動要素14の再設置位置(移動要素14と筒体28、32との固定位置)より前に、移動要素14を押し込み過ぎないようにするために、ケーシング18dの長手方向端部にストッパ220を取り付け、ストッパ220の一部を筒体32のガイド32cの端部に押し当てる。この後、作業員は、細かい速度調整を行うために、手元スイッチ222を操作し、元押し装置を低速度で駆動して、移動要素14をゆっくりと搬送させる。
【0079】
続いて、図22に示すように、ストッパ220がガイド32cに突き当たるまで、移動要素14をゆっくりと搬送する。
【0080】
ストッパ220がガイド32cに突き当たったときには、図23に示すように、元押し装置の駆動を停止するとともに、ケーシング18dから鞘管218を撤去するとともに、ストッパ220を取り外す。このとき、内側カッタヘッド26と掘削面(切羽)との間には間隙があり、内側カッタヘッド26は、外側カッタヘッド16に対して、完全に連結された状態にはない。
【0081】
次に、図24に示すように、シール蓋58をケーシング18dの長手方向端部に装着し、筒体32の内周面に反力受128を固定し、反力受128とシール蓋58との間に反力受ジャッキ126を取り付ける。この後、反力受ジャッキ126を伸張することにより、反力受128からの力が移動要素14に作用し、移動要素14が掘削面(切羽)側に僅かに移動する。
【0082】
この後、図25に示すように、移動要素14の組み込みで反力受ジャッキ126のストロークが不足するときには、反力受ジャッキ126と反力受128との間にスペーサ130を挿入する。反力受ジャッキ126と反力受128との間にスペーサ130を挿入すると、スペーサ130の厚さに相当する分だけ、移動要素14が掘削面(切羽)側に移動する。
【0083】
反力受ジャッキ126と反力受128およびスペーサ130の取り付けにより、ケーシング18aと筒体28との軸芯が僅かにずれていても、ケーシング18aを筒体28に挿入し易くするために、筒体28の嵌合部28a、ガイド28b、筒体32のガイド32a〜32dには面取りが施されているので、筒体28の段差部28aaとケーシング18aの段差部18aaが互いに当接するとともに、ケーシング18aの長手方向一端側(先端側)の外周面と筒体28の嵌合部28aの内周面が印籠結合される。これにより、内周側回転ディスク62の平行キー70と外周側回転ディスク34のキー溝46とが嵌合し、外周側カッタヘッド16と内周側カッタヘッド26が回転ディスク62と回転ディスク34を介して互いに連結される。このとき、カッタ位置検出部90がキー溝46の端部に形成されたストッパ48に当接し、カッタ位置検出部90の移動が阻止される(図9参照)。
【0084】
次に、図26に示すように、ケーシング18dと筒体28、32との間に止水材注入ホース19を再設置するとともに、継ぎ手板216を筒体32と後方架台用筒体33との境界部から取り外す。
【0085】
この後、図27に示すように、送泥管56、排泥管、電気ケーブル、制御用油圧ホース76を取り付けるとともに、後方架台用筒体33内に油圧ポンプユニット200や機内制御盤202を再設置する。これにより、掘進機10の移動要素14がトンネル内に再投入されたことなる。この後、掘進機10を駆動することで、トンネルを掘削する作業を行うことができる。
【0086】
本実施例によれば、掘進機10を、トンネル(掘削経路)中に配置された筒体28に回転自在に固定された固定要素12(カッタヘッド16)と、筒体28、32内に移動自在に配置された移動要素14(外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、内周側カッタヘッド26)とを分離(分解)可能に構成し、掘進機10を坑口側に戻す必要が生じた場合、移動要素14に対して、移動要素14を坑口側に引き戻す方向の力を作用させることで、外周側カッタヘッド16と内周側カッタヘッド26との連結が解除され、移動要素14を坑口側へ移動させることができる。
【0087】
この際、固定要素12であるカッタヘッド16の内側と筒体28内には、作業員が移動可能な空間部132が形成されるので、作業員は、掘削開始地点の坑口から筒体32、28や空間部132内を移動して、トンネル内の障害物を除去する作業を行うことができる。
【0088】
すなわち、トンネルの途中であっても、掘進機10全体を坑口側に戻すことなく、移動要素14のみを坑口側に移動させるだけで、作業員は、障害物を除去することができる。
【0089】
なお、油圧モータ24の代わりに、電動モータを用いることもできる。
【0090】
また、カッタヘッド16の代わりに、図12に示す分割型カッタヘッド160を用いたときには、到達竪坑のない推進工事において、掘進機10の移動要素14を回収した後、固定要素12の分割型カッタヘッド160を分解することで、分割型カッタヘッド160を補助固定要素160a、160b、160c、160d毎に回収することができる。
【0091】
すなわち、プレート17a、17bを互いに連結している接続用ボルト17cを取り外し、回転ディスク34を4つの要素34a、34b、34c、34dに分割して、分割型カッタヘッド160を4つの補助固定要素160a、160b、160c、160dに分割することで、分割型カッタヘッド160を補助固定要素160a、160b、160c、160d毎に掘削開始地点まで戻して回収することができる。
【0092】
また、狭小な到達竪坑でも、分割型カッタヘッド160を4つの補助固定要素160a、160b、160c、160dに分割して回収することができる。
【図面の簡単な説明】
【0093】
【図1】本発明の一実施例を示す掘進機の正面図である。
【図2】掘進機の背面図である。
【図3】図1のA−A線に沿う掘進機の縦断面図である。
【図4】移動要素の回収時における外周側カッタヘッドの正面図である。
【図5】移動要素の回収時における内周側カッタヘッドの正面図である。
【図6】移動要素の回収時の状態を示す背面図である。
【図7】移動要素の回収時の状態を示す図であって、図4のB−B線に沿う掘進機の縦断面図である。
【図8】ガイドローラと外筒との関係を示す図であって、(a)は、ガイドローラの拡大正面図、(b)は、(a)のA−A線に沿う要部拡大断面図である。
【図9】(a)は、掘進機の要部拡大断面図、(b)は、平行キーと回転ディスクとの関係を示す要部拡大断面図、(c)は、平行キーと回転ディスクとの関係を示す要部拡大平面図である。
【図10】カッタ位置検出部とガイドとの関係を示す要部断面図である。
【図11】ゲージケースとゲージロッドとの関係を示す図であって、(a)は、ゲージケースの平面図、(b)は、ゲージケースの断面図、(c)は、ゲージケースの正面図である。
【図12】外側カッタヘッドの他の実施例を示す図であって、(a)は、分割型カッタヘッドの分割前の状態を示す正面図、(b)は、分割型カッタヘッドの分割後の状態を示す正面図、(c)は、分割型カッタヘッドの要部断面図である。
【図13】掘進機の駆動を停止し、移動要素を回収する前の状態を示す図である。
【図14】バキュームホースを移動要素に接続した状態を示す図である。
【図15】シール蓋を撤去したときの状態を示す図である。
【図16】初期引き戻しの状態を示す図である。
【図17】初期引き戻しに用いた工具を撤去した後、ワイヤロープで移動要素を発進竪坑側へ引き出そうとする状態を示す図である。
【図18】回収用ウインチで移動要素を移動させるときの状態を示す図である。
【図19】継ぎ手板を筒体と後方架台用筒体に溶接で取り付けた状態を示す図である。
【図20】元押し装置と鞘管で移動要素を搬送するときの状態を示す図である。
【図21】移動要素直後に元押し装置の手元スイッチを持ち込んで移動要素の再設置作業をするときの状態を示す図である。
【図22】ストッパがガイドに突き当たるまで移動要素を搬送するときの状態を示す図である。
【図23】掘進機の搬送装置とストッパを撤去したときの状態を示す図である。
【図24】シール蓋を搬入している状態を示す図である。
【図25】反力受ジャッキを伸ばし、移動要素を、掘進を停止した位置まで押し込んだ状態を示す図である。
【図26】移動要素の設置後に、継ぎ手板を取り外した状態を示す図である。
【図27】移動要素の設置後に、機内機器を再設置した状態を示す図である。
【符号の説明】
【0094】
10 掘進機
12 固定要素
14 移動要素
16 外周側カッタヘッド(第1のカッタヘッド)
18 移動要素である外筒
20 移動要素である駆動部本体
22 移動要素であるカッタ駆動軸
24 移動要素である油圧モータ
26 移動要素である内周側カッタヘッド(第2のカッタヘッド)
34 回転ディスク(カッタヘッド16の構成要素)
36、38、40、64 切削刃(カッタヘッド16の構成要素)
46 キー溝
62 回転ディスク
160 分割型カッタヘッド
【技術分野】
【0001】
本発明は、掘進機に係り、特に、カッタヘッドを回転及び移動させて、地中にトンネルを掘るための掘進機に関する。
【背景技術】
【0002】
従来、地中にヒューム管などを埋設するに際しては、例えば、掘削開始地点に竪坑を掘り、掘削開始地点の竪坑内に掘削装置(掘進機)を配置し、掘削開始地点の竪坑から掘削終了地点に向かって掘削装置を移動させながら、掘削装置先端のカッタヘッドで管路を掘削し、掘削された管路内にヒューム管などの施設管を順次施設することが行われている。
【0003】
この際、掘削終了地点の竪坑が狭小であっても、掘削装置が回収できるように、カッタヘッドを外掘削部と内掘削部に分けて構成するとともに、外掘削部と内掘削部とを互いに取り外し可能に連結し、掘削終了地点の竪坑で、外掘削部と内掘削部とを分離し、内掘削部を本体部とともに、各施設管内を通じて掘削開始地点の発進竪坑内へ撤去するようにしたものが提案されている(特許文献1参照)。
【0004】
しかし、特許文献1に記載されているものでは、掘削装置を回収するにも、掘削終了地点の竪坑内で作業員が外掘削部と内掘削部とを分離しなければならず、管路を掘削している途中では、作業員が外掘削部と内掘削部とを分離する作業ができないので、掘削装置を回収することはできない。このため、特許文献1に記載されているものでは、掘削作業に支障を来たす恐れがある。
【0005】
すなわち、管路などを掘削している過程では、岩盤や土質に応じてカッタヘッドを交換するために、あるいはカッタヘッドなどの修理や清掃のために、掘削装置や掘進機を発進竪坑側へ一旦戻すことが行われている。この場合、特許文献1に記載されているものでは、カッタヘッドの交換や修理などができないことになる。
【0006】
そこで、管路などを掘削している過程でも、掘削装置や掘進機を発進竪坑側へ一旦戻して、カッタヘッドの交換や修理などができるようにするために、スクリューコンベアの先端側に配置されたカッタヘッドの外径を拡大して、埋設管に対していくらかの余掘りができるように構成された掘進機として、カッタヘッドの外径を埋設管よりも縮小し、外径の縮小されたカッタヘッドを埋設管内を通して、スクリューコンベア等とともに発進竪坑側へ戻すようにしたものが提案されている(特許文献2参照)。
【0007】
【特許文献1】特開平3−267497号公報
【特許文献2】特開2001−73677号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、掘削開始地点と掘削終了地点とを結ぶトンネルを掘削するときに、その途中に障害物があって、掘進機では障害物を掘削できないときには、トンネルの途中に竪坑を構築し、竪坑からトンネル内に作業員が入って障害物を除去する必要がある。一方、トンネルの途中に竪坑を構築できないときには、掘進機を発進竪坑側へ戻すことが必要となる。後者の場合、従来技術のように、カッタヘッドの外径を縮小させる構成の掘進機では、カッタヘッドやスクリューコンベア等を全て発進竪坑側へ戻す必要がある。
【0009】
本発明は、前記従来技術の課題に鑑みて為されたものであり、その目的は、掘削経路の途中でも、構成要素の一部を掘削経路中に残し、残りを掘削開始地点まで戻すことができる掘進機を提供することにある。
【課題を解決するための手段】
【0010】
前記課題を解決するために、請求項1に係る掘進機は、掘削対象を掘削して地中に掘削経路を形成しながら移動する掘進機において、前記掘削経路中に配置された筒体に回転自在に固定された固定要素と、前記筒体内に移動可能に配置されて、前記固定要素に着脱自在に連結される移動要素とを備え、前記移動要素は、前記固定要素との連結時に、前記固定要素に回転力を付与して、前記固定要素とともに前記掘削対象を掘削し、前記固定要素から分離されたときには、前記固定要素の内側と前記筒体内に作業員が移動可能な空間部を形成してなる構成とした。
【0011】
(作用)掘進機を掘削経路の途中で掘削開始地点まで戻す必要が生じた場合、例えば、掘削経路中に障害物が存在する場合、移動要素に対して、固定要素から離れる方向の力(掘削開始地点の方向に引き戻す力)を作用させると、固定要素と移動要素との連結が解除され、固定要素を掘削経路中に残し、移動要素を掘削開始地点まで戻すことができる。この際、固定要素の内側と筒体内には、作業員が移動可能な空間部が形成されるので、作業員は、掘削開始地点から掘削経路および筒体内の空間部を通って、障害物の存在する部位まで移動することができるとともに、そこで障害物を除去することが可能になる。
【0012】
請求項2に係る掘進機は、請求項1に記載の掘進機において、前記固定要素は、環状に形成されて、その外周側が前記筒体の長手方向一端側に回転自在に連結され、回転力を受けて前記掘削対象を掘削する第1のカッタヘッドを備え、前記移動要素は、前記筒体内にその長手方向に沿って配置された外筒と、前記外筒内に配置された駆動部本体と、前記駆動部本体内に、その長手方向に沿って配置されたカッタ駆動軸と、前記駆動部本体に固定されて前記カッタ駆動軸を回転駆動する駆動源と、前記カッタ駆動軸の長手方向一端側に連結されて、前記カッタ駆動軸とともに回転して前記掘削対象を掘削する第2のカッタヘッドとを備え、前記第2のカッタヘッドは、前記第1のカッタヘッドの内周側に配置されて前記第1のカッタヘッドと着脱自在に連結され、前記第1のカッタヘッドとの連結時に、前記カッタ駆動軸の回転に伴う回転力を前記第1のカッタヘッドに伝達し、前記第1のカッタヘッドから分離されたときには、前記第1のカッタヘッドの内側に作業員が移動可能な空間部を形成してなる構成とした。
【0013】
(作用)移動要素に対して、固定要素から離れる方向の力(掘削開始地点の方向に引き戻す力)を作用させると、固定要素と移動要素との連結が解除され、固定要素を掘削経路中に残し、移動要素を掘削開始地点まで戻すことができる。すなわち、外筒を掘削開始地点の方向に移動させると、外筒の移動に伴って、駆動部本体とカッタ駆動軸および駆動源が移動するとともに、第2のカッタヘッドと第1のカッタヘッドとの連結が解除され、外筒と駆動部本体とカッタ駆動軸と駆動源および第2のカッタヘッドが移動要素として、掘削開始地点まで移動する。このとき、掘削経路中には、固定要素としての第1のカッタヘッドが残されるが、第1のカッタヘッドの内側と筒体内には、作業員が移動可能な空間部が形成される。これにより、作業員は、掘削開始地点から筒体内や空間部を通って、障害物の存在する部位まで移動することができるとともに、そこで障害物を除去することが可能になる。
【0014】
請求項3に係る掘進機においては、請求項2に記載の掘進機において、前記第1のカッタヘッドは、複数の補助固定要素で構成され、前記各補助固定要素は、前記第1のカッタヘッドの周方向において互いに着脱自在に連結されてなる構成とした。
【0015】
(作用)第1のカッタヘッドを複数の補助固定要素で構成し、各補助固定要素を第1のカッタヘッドの周方向において互いに着脱自在に連結するようにしたため、移動要素の回収時に、第1のカッタヘッドを複数の補助固定要素に分割して、掘削開始地点まで戻して回収することができる。また、狭小な到達竪坑でも、第1のカッタヘッドを複数の補助固定要素に分割して回収することができる。
【発明の効果】
【0016】
以上の説明から明らかなように、請求項1に係る掘進機によれば、固定要素を掘削経路中に残し、移動要素を掘削開始地点まで戻すことができ、この際、固定要素の内側と筒体内に、作業員が移動可能な空間部を形成することができる。
【0017】
請求項2によれば、固定要素として、第1のカッタヘッドを掘削経路中に残し、外筒と駆動部本体とカッタ駆動軸と駆動源および第2のカッタヘッドを含む移動要素を掘削開始地点まで戻すことができ、この際、第1のカッタヘッドの内側と筒体内に、作業員が移動可能な空間部を形成することができる。
【0018】
請求項3によれば、第1のカッタヘッドを複数の補助固定要素に分割して、掘削開始地点や到達竪坑で回収することができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明の一実施例を示す掘進機の正面図、図2は、掘進機の背面図、図3は、図1のA−A線に沿う掘進機の縦断面図、図4は、移動要素の回収時における外周側カッタヘッドの正面図、図5は、移動要素の回収時における内周側カッタヘッドの正面図、図6は、移動要素の回収時の状態を示す背面図、図7は、移動要素の回収時の状態を示す図であって、図4のB−B線に沿う掘進機の縦断面図、図8は、ガイドローラと外筒との関係を示す図であって、(a)は、ガイドローラの拡大正面図、(b)は、(a)のA−A線に沿う要部拡大断面図、図9(a)は、掘進機の要部拡大断面図、9(b)は、平行キーと回転ディスクとの関係を示す要部拡大断面図、図9(c)は、平行キーと回転ディスクとの関係を示す要部拡大平面図、図10は、カッタ位置検出部とガイドとの関係を示す要部断面図、図11は、ゲージケースとゲージロッドとの関係を示す図であって、(a)は、ゲージケースの平面図、(b)は、ゲージケースの断面図、(c)は、ゲージケースの正面図、図12は、外側カッタヘッドの他の実施例を示す図であって、(a)は、分割型カッタヘッドの分割前の状態を示す正面図、(b)は、分割型カッタヘッドの分割後の状態を示す正面図、(c)は、分割型カッタヘッドの要部断面図、図13は、掘進機の駆動を停止し、移動要素を回収する前の状態を示す図、図14は、バキュームホースを移動要素に接続した状態を示す図、図15は、シール蓋を撤去したときの状態を示す図、図16は、初期引き戻しの状態を示す図、図17は、初期引き戻しに用いた工具を撤去した後、ワイヤロープで移動要素を発進竪坑側へ引き出そうとする状態を示す図、図18は、回収用ウインチで移動要素を移動させるときの状態を示す図、図19は、継ぎ手板を筒体と後方架台用筒体に溶接で取り付けた状態を示す図、図20は、元押し装置と鞘管で移動要素を搬送するときの状態を示す図、図21は、移動要素直後に元押し装置の手元スイッチを持ち込んで移動要素の再設置作業をするときの状態を示す図、図22は、ストッパがガイドに突き当たるまで移動要素を搬送するときの状態を示す図、図23は、掘進機の搬送装置とストッパを撤去したときの状態を示す図、図24は、シール蓋を搬入している状態を示す図、図25は、反力受ジャッキを伸ばし、移動要素を、掘進を停止した位置まで押し込んだ状態を示す図、図26は、移動要素の設置後に、継ぎ手板を取り外した状態を示す図、図27は、移動要素の設置後に、機内機器を再設置した状態を示す図である。
【0020】
図1乃至図11において、掘進機10は、トンネル(掘削経路)内に固定される固定要素12と、固定要素に着脱自在に連結されてトンネル内に移動自在に配置される移動要素14を備えている。
【0021】
固定要素12は、カッタヘッド(第1のカッタヘッド)16を備え、移動要素14は、外筒18と、駆動部本体20と、カッタ駆動軸22と、油圧モータ(駆動源)24と、カッタヘッド(第2のカッタヘッド)26などを備えて構成されている。
【0022】
カッタヘッド16は、鋼製の筒などで構成された、円筒状の筒体28の長手方向一端側に回転自在に連結されている。筒体28の長手方向他端側の内側には、シールパッキン30を介して、円筒状の筒体32が挿入されている。シールパッキン30近傍の筒体32内壁面には、プレート31の一端側が溶着されており、このプレート31には、ピン挿通用長穴31aが形成されている。ピン挿通用長穴31aに相対向して、筒体28の内壁面には、ピン35が溶着されており、このピン35は、ピン挿通用穴31a内に挿通されている。
【0023】
筒体28と筒体32とをピン35を介して連結することで、掘進機10を再投入(再設置)する際に、ケーシング18aを筒体28に挿入する抵抗で、筒体28が筒体32から離れて前方へ移動するのを防止することができる。
【0024】
なお、筒体32には、トンネルの掘削に伴って、後方架台用筒体が差し込まれ、各後方架台用筒体は、筒体28、32とともに、トンネル内に配置されて固定される。
【0025】
筒体28の内側には、カッタヘッド16側に環状の嵌合部28aが形成され、嵌合部28aに隣接してレール状のガイド28bが形成されている。筒体32の内側には、筒体28側から、レール状のガイド32a、32b、環状のガイド32c、レール状のガイド32dが間隔を保って形成されている。
【0026】
カッタヘッド16は、外周側カッタヘッドとして、図1と図4に示すように、円環状に形成された回転ディスク(外周ディスク)34と、回転ディスク34に固定された切削刃36および一対の切削刃38、40と、回転ディスク34に形成された複数個の土砂取り込みスクレーパ42を備えて構成されている。
【0027】
切削刃36は、インナービットとしてボタン型ローラービットで構成されて、回転ディスク34に固定されている。各切削刃38は、ボタン型ローラービットで構成されて、回転ディスク34の仮想の回転中心を間にして、相対向して回転ディスク34に固定されている。各切削刃40は、ディスク型ローラービットで構成されて、回転ディスク34の仮想の回転中心を間にして、相対向して回転ディスク34に固定されている。
【0028】
回転ディスク34の外周側には、筒状のフランジ44が一体に形成されており、フランジ44先端内周側には、環状の摺動部44aを残して環状の凹部44bが形成されている(図8参照)。摺動部44aは、3個のガイドローラ50の摺動路として各ガイドローラ50に当接されている。
【0029】
各ガイドローラ50は、3個の支持板52の固定軸52aにそれぞれ回転自在に支持されている。各支持板52は、筒体28の嵌合部28aの内周壁に円周方向おいて一定の間隔を保って固定されている。各支持板52には、一対の突起52bが相対向して形成され、各突起52bに固定軸52aが固定されている。固定軸52aには、ガイドローラ50が回転自在に装着されている。すなわち、カッタヘッド16は、フランジ44がガイドローラ50を介して、筒体28に回転自在に支持されている。
【0030】
各支持板52近傍には、図9に示すように、それぞれカッタ押え54が配置されており、各カッタ押え54は、筒体28の嵌合部28a内周壁に固定されている。各カッタ押え54の先端側には、突起54aが形成されている。各突起54aは、フランジ44の凹部44b内に挿入されている。すなわち、筒体28に固定されたカッタ押え54により、外周側カッタヘッド16の抜けが防止されるようになっている。
【0031】
また、回転ディスク34の内周側には筒状のフランジ45が形成されており、フランジ45の一部には、キー溝46が回転ディスク34の径方向と直交する方向(フランジ44の長手方向)に沿って形成され、キー溝46の端部には、キー溝46の側壁として位置検出部用ストッパ48が形成されている(図1と図9参照)。そして、回転ディスク34の内周側の領域は、作業員が移動可能な空間部として形成されている。
【0032】
一方、移動要素14の外筒18は、円筒状に形成されたケーシング18a、18b、18c、18dを備えており(図3参照)、ケーシング18aの内周壁には、駆動部本体20が固定され、ケーシング18b、18c、18dの内側には、送泥管56(送泥管56と対となる排泥管は図示せず)などが配置されている。
【0033】
ケーシング18aとケーシング18bは、互いに連結され、ケーシング18bとケーシング18cは、方向修正ジャッキ21を介して連結されている。ケーシング18bとケーシング18dは、方向修正ジャッキ21、ケーシング18cを介して連結されている。ケーシング18aの長手方向一端側には駆動部本体20が連結されている。ケーシング18cとケーシング18dは、連結部18eを介して互いに連結され、ケーシング18dの長手方向一端側にはシール蓋58が固定されている。また、ケーシング18aの長手方向一端側(先端側)には、筒体28の嵌合部28aに形成された段差部28aaと当接可能な段差部18aaが形成されている。段差部28aaと段差部18aaが互いに当接した際には、ケーシング18aと筒体28は、ケーシング18aの長手方向一端側(先端側)の外周面と筒体28の嵌合部28aの内周面が印籠結合される。
【0034】
駆動部本体20は、略円柱状に形成されて外筒18の長手方向に沿って配置され、ケーシング18aに固定されている。駆動部本体20には、駆動部本体20の中心部を貫く軸状部材としてのカッタ駆動軸22が回転自在に挿入されている(図3、図9参照)。カッタ駆動軸22は、長手方向(軸方向)の一端側が駆動部本体20のボス部20aに連結され、長手方向の他端側が油圧モータ24のモータ駆動軸60に連結されている。ボス部20aは、内周側カッタヘッド26に連結されている。
【0035】
内周側カッタヘッド26は、図1と図5に示すように、円盤状の回転ディスク(内周ディスク)62と、4個の切削刃64等を備え、各切削刃64は、ボタン型ローラービットで構成されている。切削刃64のうち一個は、回転ディスク62の中心部近傍に固定され、他の2個は、回転ディスク62の中間部に固定され、残りの1個は、回転ディスク62の外周部に固定されている。回転ディスク62は、作業員が移動可能な空間部に対応した大きさに形成されており、回転ディスク62の外周側には、複数の凹部62a〜62fが形成されている。
【0036】
凹部62aは、外周側カッタヘッド16のキー溝46に対応して形成されている。凹部62bは、外周側カッタヘッド16の一方の切削刃40の先端部が挿入可能に形成され、凹部62cは、外周側カッタヘッド16の切削刃36の先端部が挿入可能に形成され、凹部62dは、外周側カッタヘッド16の一方の切削刃38の先端部が挿入可能に形成されている。
【0037】
同様に、凹部62eは、外周側カッタヘッド16の他方の切削刃40の先端部が挿入可能に形成され、凹部62fは、外周側カッタヘッド16の他方の切削刃38の先端部が挿入可能に形成されている。なお、外側の切削刃64は、その先端部が、外側カッタヘッド16の凹部34a内に挿入可能に形成されている。
【0038】
また、回転ディスク62には、4個の窓66が周方向に沿って分散して形成されている。回転ディスク62の各窓66より内周側には、駆動部本体20のリブ20bが一体となって溶着されている(図9参照)。リブ20bは、ボス部20aに溶着されている。
【0039】
すなわち、回転ディスク62は、リブ20bとボス部20aが溶接によって固着されて一体化され、リブ20b、ボス部20aを介してカッタ駆動軸22に連結されている。
【0040】
また、回転ディスク62の各窓66より外周側には、フランジ68が一体となって形成されている(図9参照)。フランジ68の外周側には、挿入組み込み可能な平行キー70が装着されている。平行キー70はボルト72によってフランジ68に固定されている。平行キー70は、外周側回転ディスク34のフランジ45に形成されたキー溝46に嵌合されている。
【0041】
すなわち、内周側回転ディスク62は、平行キー70とキー溝46を介して外周側回転ディスク34と着脱自在に連結されている。このため、外周側回転ディスク34には、油圧モータ24からの回転力(駆動力)がモータ駆動軸60、カッタ駆動軸22、ボス部20a、リブ20b、内周側回転ディスク62を介して伝達される。
【0042】
また、外周側回転ディスク34は、フランジ45の端部が、内周側回転ディスク62のフランジ68の長手方向端部に形成された、ストッパとしての凸部68aに当接するので、外周側カッタヘッド16に加わる掘削時の軸方向(長手方向)の力を内周側カッタヘッド26に伝達することができる。
【0043】
油圧モータ24は、図3に示すように、ボルトを含む固定部材74を介してケーシング18bに固定されており、油圧モータ24には、正回転用と逆回転用およびドレン用の3本の油圧ホース76が連結されている。各油圧ホース76は、坑外に設置される油圧制御ユニット(図示せず)に接続されている。油圧モータ24は、油圧制御ユニットの制御に従った油圧に応答して、モータ駆動軸60を正回転または逆回転するようになっている。
【0044】
カッタ駆動軸22には、その中心部を貫く貫通孔80が長手方向に沿って形成されており(図9参照)、貫通孔80には、円柱状のゲージロッド82が摺動自在に挿入されている。ゲージロッド82は、カッタ駆動軸22と、油圧モータ24およびエンドブラケット84に亘って配置されている。
【0045】
ゲージロッド82の長手方向一端側には、L字型に形成された支持ロッド88が連結されており、支持ロッド88の先端側には、支持ロッド88に直交してカッタ位置検出部90が固定されている。カッタ位置検出部90は、外周側回転ディスク34のキー溝46に挿入可能に形成され、支持ロッド88は、内周側回転ディスク62の凹部62aに挿入可能に形成されている。内周側回転ディスク62の凹部62a近傍には、図10に示すように、支持ロッド88の移動をガイドするガイド部材92、94が固定されている。
【0046】
一方、ゲージロッド82の長手方向他端側には、図11に示すように、小径部82aが形成されている。小径部82aの長手方向端部には、手押し治具挿入用の穴96が形成され、小径部82aの長手方向端部外周には、滑り軸受98が固定されている。滑り軸受98外周には位置決めゲージ100が固定され、位置決めゲージ100には、六角穴付きボルト102が固定されている。六角穴付きボルト102は、ゲージケース104の溝106内に挿入されて、位置決めゲージ100の回り止めと指針を兼用するようになっている。ゲージケース104の溝106の縁には、位置決めゲージ100の位置を読み取るための目盛として、位置決め完了目盛108、位置決め開始目盛110、カッタ装着完了目盛112が付けられている。
【0047】
また、小径部82aの外周側には、圧縮されたばね114が装着されている。ばね114は、長手方向一端側が調圧スペーサ116を介して位置決めゲージ100に支持され、長手方向他端側がエンドブラケット84に支持され、蓄積された弾性力(ばね力)により、ゲージロッド82をカッタヘッド26側に付勢するようになっている。なお、ばね114の弾性力は、調圧スペーサ116の厚みを変えることで調整できるようになっている。
【0048】
また、油圧バルブユニット78は、油圧ポンプユニット200(図13参照)から油圧の供給を受けて、方向修正ジャッキ21、止水弁56a、バイパス弁56cを制御する。油圧バルブユニット78近傍には、図3に示すように、反射鏡120が配置され、油圧バルブユニット78の周囲には、メータパネル122、レーザ反射装置124が配置されている。
【0049】
反射鏡120は、推進計画線から掘進機10先端中心までの距離(変位)をメータパネル122の目盛板に表示するために、掘進機10の外筒18のうち屈曲部より前となる、ケーシング18bに油圧モータ24を介して固定されている。
メータパネル122は、反射鏡120に相対向して、ケーシング18dに固定されており、このメータパネル122には、掘進機10を制御するための計器類、例えば、油圧圧力計、ストローク計、表示灯等が配置されているとともに、推進計画線から掘進機10先端中心までの距離(変位)を表示するための目盛板等が配置されている。
【0050】
レーザ反射装置124は、2枚のミラーと2枚のビームスプリッタを組み合わせて構成され、推進計画線から掘進機10先端中心までの距離(変位)とレーザ反射装置124付近における推進計画線と掘進機10後端側の外筒18の中心までの距離(変位)をメータパネル122の目盛板に表示することができる。
【0051】
推進計画線から掘進機10先端中心までの距離(変位)とレーザ反射装置124付近における推進計画線と掘進機10後端側の外筒18の中心までの距離(変位)は、発進竪坑に設置されたレーザ発光器から推進計画線上に照射されるレーザ光線をレーザ反射装置124と反射鏡120で反射させて、その反射光をメータパネル122に照射したときに、メータパネル122の目盛板の中心からの変位として確認することができる。この際、掘進機10が推進計画線上にあれば、レーザ光線は目盛板の中心に照射される。
【0052】
また、ケーシング18dの長手方向端部にはストッパ220が取り付けられており、ストッパ220の一部が筒体32のガイド32cの端部に押し当てられている。なお、ストッパ220は、初期引き戻し後に外すこともある。
【0053】
ケーシング18dの長手方向端部とガイド32cとの間には両者の間隙を閉塞するためのシール蓋58が配置されている。このシール蓋58は、外筒18のケーシング18dの長手方向端部に固定されて、ケーシング18dから脱落しないように、ストッパ220で支持されている。ケーシング18dの端面は4台の反力受ジャッキ126と当接して支持されている。各反力受ジャッキ126は、反力受128に固定されており、反力受128は、筒体32の内壁面に固定されている。そして、各反力受ジャッキ126と反力受128との間には、各反力受ジャッキ126のストロークが不足する場合、スペーサ130が挿入される。この際、筒体32に固定された反力受128は、掘進機10の駆動時に、掘進機10から各反力受ジャッキ126に作用する力を反力として受けて、掘進機10を保持するようになっている。
【0054】
また、カッタヘッド16の代わりに、図12に示すように、分割型カッタヘッド160を用いることができる。分割型カッタヘッド160は、4つの補助固定要素160a、160b、160c、160dに分割可能に構成され、補助固定要素160a、160b、160c、160dを着脱自在に連結されている。
【0055】
この際、回転ディスク34をその周方向において、4つの要素34a、34b、34c、34dに分割し、分割された各要素34a〜34bの両端面にそれぞれプレート17a、17bを溶接し、相隣接するプレート17aとプレート17bを接続用ボルト17cで締結する。
【0056】
上記構成による掘進機10を用いて、地中に、掘削開始位置と掘削終了位置とを結ぶ掘削経路としてのトンネルを掘削するに際して、掘削開始位置の坑口に掘進機10を配置し、油圧モータ24を駆動するための作業を行う。
【0057】
まず、油圧モータ24を回転駆動するに先立って、送泥管56の止水弁56aを閉じるとともに、排泥管の止水弁を閉じ、バイパス弁56cを開き、送泥管56と排泥管をバイパス弁56cを連通させて、送泥管56と排泥管内に水を流し、流量と水圧を調整する。その後、送泥管56の止水弁56aを開くとともに、排泥管の止水弁を開き、バイパス弁56cを閉じる。
【0058】
この後、油圧モータ24を駆動すると、油圧モータ24の回転駆動により、油圧モータ24の回転力がモータ駆動軸60、カッタ駆動軸22を介して内周側カッタヘッド26に伝達され、内周側カッタヘッド26が回転するともに、内周側カッタヘッド26の回転力が外周側カッタヘッド16に伝達され、各カッタヘッド16、26の回転に伴って、切削刃36、38、40、64によって掘削対象が掘削され、地中にトンネルが形成される。
【0059】
ここで、地中にトンネルを掘削している過程で、掘進機10を掘削開始位置の坑口まで戻す必要が生じた場合、例えば、トンネルの途中に障害物が存在する場合、外周側カッタヘッド16と内周側カッタヘッド26との連結を解除するために、移動要素14に対して、移動要素14を坑口側へ引き戻す方向の力を作用させると、図7に示すように、図内周側回転ディスク62の平行キー70と外周側回転ディスク34のキー溝46との嵌合が解除され、外周側カッタヘッド16と内周側カッタヘッド26との連結が解除される(図4から図6参照)。
【0060】
すなわち、掘進機10は、トンネル(掘削経路)に配置された筒体28に回転自在に固定された固定要素12(カッタヘッド16)と、筒体28、32内に移動可能に配置された移動要素14(外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、内周側カッタヘッド26)とが分離(分解)可能に構成されているので、移動要素14に対して、移動要素14を坑口側に引き戻す方向の力を作用させることで、外周側カッタヘッド16と内周側カッタヘッド26との連結が解除され、移動要素14を坑口側へ移動させることができる。
【0061】
移動要素14を坑口側へ移動させると、図7に示すように、外側カッタヘッド16の内側と筒体28内には、作業員が移動可能な空間部132が形成されるので、作業員は、掘削開始地点の坑口から筒体33、32、28通って空間部132まで移動することができる。ここで、作業員は、空間部132から作業空間部などに移動して、障害物を除去する作業を行うことができる。
【0062】
障害物を除去する作業が終了し、作業員が、掘削開始地点の坑口側に戻ったときには、外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、および内周側カッタヘッド26を含む移動要素14を坑口側から、後方架台用筒体(図示せず)内に挿入し、移動要素14全体をトンネル先端側の所定位置まで移動させる。
【0063】
この際、作業員は、ケージロッド82の小径部82aに形成された穴96内に手押し治具(図示せず)の先端側を挿入し、手押し治具を介して、ゲージロッド82をカッタヘッド16側に押し出すと、ゲージロッド82の先端側が切削刃64の取り付け部64aに突き当たる。このとき、構造上、位置決めゲージ100は位置決め完了目盛108の位置となる(図11参照)。
【0064】
移動要素14全体を空間部の所定位置まで移動させたときには、ゲージロッド82のカッタ位置検出部90がカッタヘッド16の回転ディスク34に突き当たる。ここで、作業者は、位置決めゲージ100が位置決め開始目盛110の位置にあるか否かを確認する。位置決めゲージ100が位置決め開始目盛110の位置にあるときに、油圧モータ24を低速度で回転させながら、カッタ位置検出部90を回転ディスク34のキー溝46に挿入するための位置決めを行う。
【0065】
カッタ位置検出部90を回転ディスク34のキー溝46に挿入するための位置決めが行われると、支持ロッド88がガイド部材92、94にガイドされながらカッタヘッド16の先端側に移動するとともに、カッタ位置検出部90が回転ディスク34のキー溝46に沿ってカッタヘッド16の先端側に移動する(図9と図10参照)。このとき、作業者は、位置決めゲージ100が位置決め完了目盛108の位置とあることを確認したときには、油圧モータ24の駆動を停止する。これにより、カッタヘッド16とカッタヘッド26との位置決めが完了する。
【0066】
この後、外筒18や駆動部本体20を含む移動要素14全体をトンネルの壁面に向けて移動させると、内周側回転ディスク62の平行キー70と外周側回転ディスク34のキー溝46とが嵌合し、外周側カッタヘッド16と内周側カッタヘッド26が回転ディスク62と回転ディスク34を介して互いに連結される。このとき、カッタ位置検出部90がキー溝46の端部に形成されたストッパ48に当接し、カッタ位置検出部90の移動が阻止され、位置決めゲージ100がカッタ装着完了目盛112の位置となる。
【0067】
これにより、作業員は、外周側カッタヘッド16と内周側カッタヘッド26が再び連結され、移動要素14全体の移動が完了したことを位置決めゲージ100で確認することができる。移動要素14が固定要素12に連結されることで、掘進機10が復元されたことになる。
【0068】
次に、掘進機10の移動要素14の回収作業を図13から図18に基づいて説明する。まず、図13に示すように、推進終了後、機内止水弁56aを閉じるとともに、掘進機動力電源、操作電源をオフとし、筒体28、32の内周側に固定されている止水材注入ホース19に止水材(薬液)を注入し、筒体28先端側の注入口29から筒体28外側の地盤に向けて止水材(薬液)を注入する。すなわち、地下水位下で掘進機10の移動要素14を回収する場合、筒体28、32外側の地盤からの地下水が掘進機10内に浸入する恐れがあるので、掘進機10の移動要素14を回収する前に、止水処理として、筒体28先端側の注入口29から筒体28外側の地盤に向けて止水材(薬液)を注入することとしている。
【0069】
次に、送泥管56、排泥管(図示せず)、電気ケーブル(図示せず)、制御用油圧ホース76、後方架台用筒体33内の油圧ポンプユニット200と機内制御盤202を撤去する。この後、図14に示すように、泥水抜きバルブ56bにバキュームホース204を取り付ける。次に、バキュームホース204に連結されたバキュームポンプ(図示せず)の作動により、筒体28、32と掘進機10間の泥水をバキュームホース204を介して排出する。
【0070】
この後は、図15に示すように、反力受128と各反力受ジャッキ126を取り外し、その後、ケーシング18dの長手方向端部とガイド32cとの間隙を閉塞するためのシール蓋58を撤去する。
【0071】
次に、図16に示すように、後方架台用筒体33に、一対の引き抜き治具206を固定し、各引き抜き治具206を手動センターホールジャッキ208に連結し、各手動センターホールジャッキ208に固定された引き抜き鋼棒210を坑口側へ引き戻す方向に操作して、掘進機10の移動要素14に対する初期引き戻しを行い、移動要素14を300mm程度引き戻す。
【0072】
次に、移動要素14を300mm程度引き戻し後は、図17に示すように、初期引き戻しに用いた工具を撤去する。この後、ケーシング18dにワイヤロープ用金具212を取り付け、ワイヤロープ用金具212にウインチワイヤロープ214を取り付け、ウインチワイヤロープ214に連結された回収用ウインチ(図示せず)の作動により、掘進機10の移動要素14を坑口側に引き戻す。
【0073】
回収用ウインチ(図示せず)の作動により、掘進機10の移動要素14が坑口側に移動する過程では、図18に示すように、掘進機10の移動要素14は、筒体32のガイド32cをそのまま通過して、筒体32から抜けて行く。
【0074】
外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、および内周側カッタヘッド26を含む移動要素14を坑口側に引き戻すと、図18において、移動要素14が除去された形態となって、外側カッタヘッド16の内側と筒体28内には、作業員が移動可能な空間部132が形成されるので、作業員は、掘削開始地点の坑口から筒体33、32、28通って空間部132まで移動することができる。ここで、作業員は、空間部132から作業空間部などに移動して、障害物を除去する作業を行うことができる。
【0075】
次に、掘進機10の移動要素14を再投入(再設置)するときの作用を図19から図27に基づいて説明する。
【0076】
トンネル内の障害物が除去された後、掘進機10の移動要素14をトンネル内に再投入するに際しては、図19に示すように、筒体28、32の内部に止水材注入ホース19を再配置し、止水材注入ホース19を筒体28、32の内部壁面にバインド線などで固定する。この後、掘進機10の移動要素14の再設置時に、移動要素14の押し込み抵抗で筒体32と後方架台用筒体33とが離れないようにするために、筒体32と後方架台用筒体33との境界部に継ぎ手板216を2個ピッチ溶接する。これは、継ぎ手板216がないと、移動要素14を筒体28、32に挿入する抵抗で筒体32が後方架台用筒体33から離れて前方へ移動してしまい、筒体28、32と移動要素14の固定が完全にできないためである。
【0077】
この後、トンネルの坑口側から掘進機10の移動要素14を挿入し、図20に示すように、ケーシング18dの長手方向端部に鞘管(搬送装置)218を連結するとともに、鞘管218に連結された元押し装置(図示せず)を坑外で操作し、元押し装置の駆動により、鞘管218とともに、移動要素14を筒体32のガイド32c近傍まで搬送する。
【0078】
次に、図21に示すように、ケーシング18dの長手方向端部に、ケーシング18dから外側に僅かに突出するように、ストッパ220を取り付け、元押し装置の操作を手元スイッチ222に切り替える。すなわち、移動要素14の再設置位置(移動要素14と筒体28、32との固定位置)より前に、移動要素14を押し込み過ぎないようにするために、ケーシング18dの長手方向端部にストッパ220を取り付け、ストッパ220の一部を筒体32のガイド32cの端部に押し当てる。この後、作業員は、細かい速度調整を行うために、手元スイッチ222を操作し、元押し装置を低速度で駆動して、移動要素14をゆっくりと搬送させる。
【0079】
続いて、図22に示すように、ストッパ220がガイド32cに突き当たるまで、移動要素14をゆっくりと搬送する。
【0080】
ストッパ220がガイド32cに突き当たったときには、図23に示すように、元押し装置の駆動を停止するとともに、ケーシング18dから鞘管218を撤去するとともに、ストッパ220を取り外す。このとき、内側カッタヘッド26と掘削面(切羽)との間には間隙があり、内側カッタヘッド26は、外側カッタヘッド16に対して、完全に連結された状態にはない。
【0081】
次に、図24に示すように、シール蓋58をケーシング18dの長手方向端部に装着し、筒体32の内周面に反力受128を固定し、反力受128とシール蓋58との間に反力受ジャッキ126を取り付ける。この後、反力受ジャッキ126を伸張することにより、反力受128からの力が移動要素14に作用し、移動要素14が掘削面(切羽)側に僅かに移動する。
【0082】
この後、図25に示すように、移動要素14の組み込みで反力受ジャッキ126のストロークが不足するときには、反力受ジャッキ126と反力受128との間にスペーサ130を挿入する。反力受ジャッキ126と反力受128との間にスペーサ130を挿入すると、スペーサ130の厚さに相当する分だけ、移動要素14が掘削面(切羽)側に移動する。
【0083】
反力受ジャッキ126と反力受128およびスペーサ130の取り付けにより、ケーシング18aと筒体28との軸芯が僅かにずれていても、ケーシング18aを筒体28に挿入し易くするために、筒体28の嵌合部28a、ガイド28b、筒体32のガイド32a〜32dには面取りが施されているので、筒体28の段差部28aaとケーシング18aの段差部18aaが互いに当接するとともに、ケーシング18aの長手方向一端側(先端側)の外周面と筒体28の嵌合部28aの内周面が印籠結合される。これにより、内周側回転ディスク62の平行キー70と外周側回転ディスク34のキー溝46とが嵌合し、外周側カッタヘッド16と内周側カッタヘッド26が回転ディスク62と回転ディスク34を介して互いに連結される。このとき、カッタ位置検出部90がキー溝46の端部に形成されたストッパ48に当接し、カッタ位置検出部90の移動が阻止される(図9参照)。
【0084】
次に、図26に示すように、ケーシング18dと筒体28、32との間に止水材注入ホース19を再設置するとともに、継ぎ手板216を筒体32と後方架台用筒体33との境界部から取り外す。
【0085】
この後、図27に示すように、送泥管56、排泥管、電気ケーブル、制御用油圧ホース76を取り付けるとともに、後方架台用筒体33内に油圧ポンプユニット200や機内制御盤202を再設置する。これにより、掘進機10の移動要素14がトンネル内に再投入されたことなる。この後、掘進機10を駆動することで、トンネルを掘削する作業を行うことができる。
【0086】
本実施例によれば、掘進機10を、トンネル(掘削経路)中に配置された筒体28に回転自在に固定された固定要素12(カッタヘッド16)と、筒体28、32内に移動自在に配置された移動要素14(外筒18、駆動部本体20、カッタ駆動軸22、油圧モータ24、内周側カッタヘッド26)とを分離(分解)可能に構成し、掘進機10を坑口側に戻す必要が生じた場合、移動要素14に対して、移動要素14を坑口側に引き戻す方向の力を作用させることで、外周側カッタヘッド16と内周側カッタヘッド26との連結が解除され、移動要素14を坑口側へ移動させることができる。
【0087】
この際、固定要素12であるカッタヘッド16の内側と筒体28内には、作業員が移動可能な空間部132が形成されるので、作業員は、掘削開始地点の坑口から筒体32、28や空間部132内を移動して、トンネル内の障害物を除去する作業を行うことができる。
【0088】
すなわち、トンネルの途中であっても、掘進機10全体を坑口側に戻すことなく、移動要素14のみを坑口側に移動させるだけで、作業員は、障害物を除去することができる。
【0089】
なお、油圧モータ24の代わりに、電動モータを用いることもできる。
【0090】
また、カッタヘッド16の代わりに、図12に示す分割型カッタヘッド160を用いたときには、到達竪坑のない推進工事において、掘進機10の移動要素14を回収した後、固定要素12の分割型カッタヘッド160を分解することで、分割型カッタヘッド160を補助固定要素160a、160b、160c、160d毎に回収することができる。
【0091】
すなわち、プレート17a、17bを互いに連結している接続用ボルト17cを取り外し、回転ディスク34を4つの要素34a、34b、34c、34dに分割して、分割型カッタヘッド160を4つの補助固定要素160a、160b、160c、160dに分割することで、分割型カッタヘッド160を補助固定要素160a、160b、160c、160d毎に掘削開始地点まで戻して回収することができる。
【0092】
また、狭小な到達竪坑でも、分割型カッタヘッド160を4つの補助固定要素160a、160b、160c、160dに分割して回収することができる。
【図面の簡単な説明】
【0093】
【図1】本発明の一実施例を示す掘進機の正面図である。
【図2】掘進機の背面図である。
【図3】図1のA−A線に沿う掘進機の縦断面図である。
【図4】移動要素の回収時における外周側カッタヘッドの正面図である。
【図5】移動要素の回収時における内周側カッタヘッドの正面図である。
【図6】移動要素の回収時の状態を示す背面図である。
【図7】移動要素の回収時の状態を示す図であって、図4のB−B線に沿う掘進機の縦断面図である。
【図8】ガイドローラと外筒との関係を示す図であって、(a)は、ガイドローラの拡大正面図、(b)は、(a)のA−A線に沿う要部拡大断面図である。
【図9】(a)は、掘進機の要部拡大断面図、(b)は、平行キーと回転ディスクとの関係を示す要部拡大断面図、(c)は、平行キーと回転ディスクとの関係を示す要部拡大平面図である。
【図10】カッタ位置検出部とガイドとの関係を示す要部断面図である。
【図11】ゲージケースとゲージロッドとの関係を示す図であって、(a)は、ゲージケースの平面図、(b)は、ゲージケースの断面図、(c)は、ゲージケースの正面図である。
【図12】外側カッタヘッドの他の実施例を示す図であって、(a)は、分割型カッタヘッドの分割前の状態を示す正面図、(b)は、分割型カッタヘッドの分割後の状態を示す正面図、(c)は、分割型カッタヘッドの要部断面図である。
【図13】掘進機の駆動を停止し、移動要素を回収する前の状態を示す図である。
【図14】バキュームホースを移動要素に接続した状態を示す図である。
【図15】シール蓋を撤去したときの状態を示す図である。
【図16】初期引き戻しの状態を示す図である。
【図17】初期引き戻しに用いた工具を撤去した後、ワイヤロープで移動要素を発進竪坑側へ引き出そうとする状態を示す図である。
【図18】回収用ウインチで移動要素を移動させるときの状態を示す図である。
【図19】継ぎ手板を筒体と後方架台用筒体に溶接で取り付けた状態を示す図である。
【図20】元押し装置と鞘管で移動要素を搬送するときの状態を示す図である。
【図21】移動要素直後に元押し装置の手元スイッチを持ち込んで移動要素の再設置作業をするときの状態を示す図である。
【図22】ストッパがガイドに突き当たるまで移動要素を搬送するときの状態を示す図である。
【図23】掘進機の搬送装置とストッパを撤去したときの状態を示す図である。
【図24】シール蓋を搬入している状態を示す図である。
【図25】反力受ジャッキを伸ばし、移動要素を、掘進を停止した位置まで押し込んだ状態を示す図である。
【図26】移動要素の設置後に、継ぎ手板を取り外した状態を示す図である。
【図27】移動要素の設置後に、機内機器を再設置した状態を示す図である。
【符号の説明】
【0094】
10 掘進機
12 固定要素
14 移動要素
16 外周側カッタヘッド(第1のカッタヘッド)
18 移動要素である外筒
20 移動要素である駆動部本体
22 移動要素であるカッタ駆動軸
24 移動要素である油圧モータ
26 移動要素である内周側カッタヘッド(第2のカッタヘッド)
34 回転ディスク(カッタヘッド16の構成要素)
36、38、40、64 切削刃(カッタヘッド16の構成要素)
46 キー溝
62 回転ディスク
160 分割型カッタヘッド
【特許請求の範囲】
【請求項1】
掘削対象を掘削して地中に掘削経路を形成しながら移動する掘進機において、前記掘削経路中に配置された筒体に回転自在に固定された固定要素と、前記筒体内に移動可能に配置されて、前記固定要素に着脱自在に連結される移動要素とを備え、前記移動要素は、前記固定要素との連結時に、前記固定要素に回転力を付与して、前記固定要素とともに前記掘削対象を掘削し、前記固定要素から分離されたときには、前記固定要素の内側と前記筒体内に作業員が移動可能な空間部を形成してなることを特徴とする掘進機。
【請求項2】
請求項1に記載の掘進機において、
前記固定要素は、環状に形成されて、その外周側が前記筒体の長手方向一端側に回転自在に連結され、回転力を受けて前記掘削対象を掘削する第1のカッタヘッドを備え、
前記移動要素は、前記筒体内にその長手方向に沿って配置された外筒と、前記外筒内に配置された駆動部本体と、前記駆動部本体内に、その長手方向に沿って配置されたカッタ駆動軸と、前記駆動部本体に固定されて前記カッタ駆動軸を回転駆動する駆動源と、前記カッタ駆動軸の長手方向一端側に連結されて、前記カッタ駆動軸とともに回転して前記掘削対象を掘削する第2のカッタヘッドとを備え、
前記第2のカッタヘッドは、前記第1のカッタヘッドの内周側に配置されて前記第1のカッタヘッドと着脱自在に連結され、前記第1のカッタヘッドとの連結時に、前記カッタ駆動軸の回転に伴う回転力を前記第1のカッタヘッドに伝達し、前記第1のカッタヘッドから分離されたときには、前記第1のカッタヘッドの内側に作業員が移動可能な空間部を形成してなることを特徴とする掘進機。
【請求項3】
請求項2に記載の掘進機において、前記第1のカッタヘッドは、複数の補助固定要素で構成され、前記各補助固定要素は、前記第1のカッタヘッドの周方向において互いに着脱自在に連結されてなることを特徴とする掘進機。
【請求項1】
掘削対象を掘削して地中に掘削経路を形成しながら移動する掘進機において、前記掘削経路中に配置された筒体に回転自在に固定された固定要素と、前記筒体内に移動可能に配置されて、前記固定要素に着脱自在に連結される移動要素とを備え、前記移動要素は、前記固定要素との連結時に、前記固定要素に回転力を付与して、前記固定要素とともに前記掘削対象を掘削し、前記固定要素から分離されたときには、前記固定要素の内側と前記筒体内に作業員が移動可能な空間部を形成してなることを特徴とする掘進機。
【請求項2】
請求項1に記載の掘進機において、
前記固定要素は、環状に形成されて、その外周側が前記筒体の長手方向一端側に回転自在に連結され、回転力を受けて前記掘削対象を掘削する第1のカッタヘッドを備え、
前記移動要素は、前記筒体内にその長手方向に沿って配置された外筒と、前記外筒内に配置された駆動部本体と、前記駆動部本体内に、その長手方向に沿って配置されたカッタ駆動軸と、前記駆動部本体に固定されて前記カッタ駆動軸を回転駆動する駆動源と、前記カッタ駆動軸の長手方向一端側に連結されて、前記カッタ駆動軸とともに回転して前記掘削対象を掘削する第2のカッタヘッドとを備え、
前記第2のカッタヘッドは、前記第1のカッタヘッドの内周側に配置されて前記第1のカッタヘッドと着脱自在に連結され、前記第1のカッタヘッドとの連結時に、前記カッタ駆動軸の回転に伴う回転力を前記第1のカッタヘッドに伝達し、前記第1のカッタヘッドから分離されたときには、前記第1のカッタヘッドの内側に作業員が移動可能な空間部を形成してなることを特徴とする掘進機。
【請求項3】
請求項2に記載の掘進機において、前記第1のカッタヘッドは、複数の補助固定要素で構成され、前記各補助固定要素は、前記第1のカッタヘッドの周方向において互いに着脱自在に連結されてなることを特徴とする掘進機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2010−24734(P2010−24734A)
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願番号】特願2008−188373(P2008−188373)
【出願日】平成20年7月22日(2008.7.22)
【出願人】(000127259)株式会社イセキ開発工機 (9)
【Fターム(参考)】
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願日】平成20年7月22日(2008.7.22)
【出願人】(000127259)株式会社イセキ開発工機 (9)
【Fターム(参考)】
[ Back to top ]