
探査システム

【課題】探査精度を向上することが可能な探査技術を提供する。
【解決手段】本発明の空中曳航体7は、探査対象に関する情報を含む信号を受信する受信センサーを有し、ヘリコプタ等の飛行物体によって空中で曳航される。空中曳航体7は、曳航方向200とは反対方向に向かって細くなる水滴型の本体部71と、当該本体部71の尾部71bを取り囲み、曳航方向200とは反対方向に向かって細くなる筒状の安定翼90とを備えている。
【解決手段】本発明の空中曳航体7は、探査対象に関する情報を含む信号を受信する受信センサーを有し、ヘリコプタ等の飛行物体によって空中で曳航される。空中曳航体7は、曳航方向200とは反対方向に向かって細くなる水滴型の本体部71と、当該本体部71の尾部71bを取り囲み、曳航方向200とは反対方向に向かって細くなる筒状の安定翼90とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ヘリコプタ等の飛行物体に曳航される空中曳航体によって受信された受信信号に基づいて探査対象に関する情報を取得する探査システムに関する。
【背景技術】
【0002】
電磁波を利用して地下構造を探査する方法としては、従来より、地表に送信器と受信器を設置する方法と、飛行物体に送信器と受信器を設置する方法とが知られている。
【0003】
前者は、地表に設置した送信器から送信された電磁波により地殻に発生した誘導電磁波を、地表に設置した受信器により受信測定することにより、地殻構造を探査するCSAMT(Control Source Audio Magneto Telluric)法やTDEM(Time Domain ElectroMagnetic)法などである。
【0004】
後者は、ヘリコプタなどの飛行物体に送信器と受信器とが設置され、送信器から送信された電磁波により地殻に発生した誘導電磁場を受信器により受信測定し、地殻構造を探査する空中電磁探査法と呼ばれる方法である。
【0005】
前者の地表に送信器と受信器を設置する方法では、広域について測定を行う場合、測定点毎に受信器を移動し設置する必要があり、測定のために膨大な手間と時間が必要である。
【0006】
また、後者の飛行物体に送信器と受信器を設置し空中から送受信する方法では、測定は容易であるが、ヘリコプタなどの飛行物体に搭載することができる送信器や受信器の大きさおよび重量が制限される。送信器と受信器との間の距離が近いために、強力な電磁波を発信するができず探査することができる地殻の深度が限られる。
【0007】
そこで、このような課題を解決するために、送信器を地表に設置し、受信器を飛行物体に搭載することにより電磁波を利用して地下構造を探査するグランドソース型空中電磁探査法と呼ばれる方法が提案されている。この探査方法は例えば特許文献1,2及び非特許文献1に開示されている。
【0008】
【特許文献1】特開平9−304547号公報
【特許文献2】国際公開第92/19989号パンフレット
【非特許文献1】R. A. Bosschart et al., “Advances in Deep Penetration Airborne Electromagnetic Methods”, Exploration Geophysics, 24th IGC, section9, 1972, p37-48
【発明の開示】
【発明が解決しようとする課題】
【0009】
さて、空中電磁探査法では、地殻に発生する誘導電磁場を受信する受信センサーが、飛行物体から吊り下げられた「バード」と呼ばれる空中曳航体内に搭載されているため、当該受信センサーが曳航中に揺れやすく、この受信センサーの揺れによって発生するノイズ信号のために、十分な探査精度を得ることが困難であった。
【0010】
そこで、本発明は、上述の問題に鑑みて成されたものであり、探査精度を向上することが可能な探査技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
この発明の請求項1に係る探査システムは、探査対象に関する情報を含む信号を受信する受信センサーを有し、前記飛行物体に空中で曳航される空中曳航体とを備える探査システムであって、前記空中曳航体は、曳航方向とは反対方向に向かって細くなる水滴型の本体部と、前記本体部の尾部を取り囲み、前記曳航方向とは反対方向に向かって細くなる筒状の安定翼とを備える。
【0012】
また、この発明の請求項2に係る探査システムは、請求項1に記載の探査システムであって、前記空中曳航体の前記本体部では、前記曳航方向に垂直な方向に沿った断面形状が紡錘形である。
【0013】
また、この発明の請求項3に係る探査システムは、請求項1及び請求項2のいずれか一つに記載の探査システムであって、前記空中曳航体における前記本体部の頭部内には、前記受信センサーが搭載され、その揺れを抑制するジンバル構造を有するセンサー台が設けられている。
【0014】
また、この発明の請求項4に係る探査システムは、請求項3に記載の探査システムであって、前記頭部内には、前記受信センサーの姿勢を検出する姿勢計が設けられており、前記姿勢計は、前記ジンバル構造の上面に取り付けられており、前記受信センサーは、前記ジンバル構造の下面に取り付けられている。
【0015】
また、この発明の請求項5に係る探査システムは、請求項1乃至請求項3のいずれか一つに記載の探査システムであって、前記空中曳航体における前記本体部の頭部内には、前記受信センサーの姿勢を計測する姿勢計が設けられており、前記受信センサーの揺れによって前記受信センサーでの受信信号に含まれるノイズ信号の予測値を、前記姿勢計での計測結果に基づいて求める揺れノイズ予測部と、前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する探査情報取得部とを更に備える。
【0016】
また、この発明の請求項6に係る探査システムは、請求項5に記載の探査システムであって、前記予測値の周波数特性を前記受信センサーでの周波数特性に補正する、周波数特性補正部を更に備え、前記探査情報取得部は、前記周波数特性補正部で補正された前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する。
【0017】
また、この発明の請求項7に係る探査システムは、請求項6に記載の探査システムであって、前記周波数特性補正部は、前記予測値と、前記受信センサーで測定された前記ノイズ信号との関係を示す伝達関数に基づいて、前記予測値を前記受信センサーでの周波数特性に補正する。
【0018】
また、この発明の請求項8に係る探査システムは、請求項6に記載の探査システムであって、前記周波数特性補正部は、適応フィルタを用いて前記予測値を前記受信センサーでの周波数特性に補正する。
【発明の効果】
【0019】
この発明の請求項1に係る探査システムによれば、空中曳航体の本体部が曳航方向とは反対方向に向かって細くなる水滴型であるため、飛行物体が移動している際に当該本体部の後方には空気の渦が発生し難くなる。従って、空中曳航体の揺れを抑制できる。
【0020】
更に、筒状の安定翼は曳航方向とは反対方向に向かって細くなっているため、飛行物体が移動している際に筒状の安定翼内を通過する風は尾部に衝突しながら後方に流れ易くなる。そのため、尾部には曳航方向とは逆向きの力が発生しやすくなり、尾部が後方に引っ張れるようになる。従って、空中曳航体が曳航方向に向きやすくなり、空中曳航体の揺れを更に抑制できる。その結果、受信センサーの揺れによって受信信号内に発生するノイズを確実に低減でき、高精度な探査が可能となり、探査深度が向上する。
【0021】
また、この発明の請求項2に係る探査システムによれば、空中曳航体の本体部では、曳航方向に垂直な方向に沿った断面形状が紡錘形であるため、更に空中曳航体の揺れを低減できる。その結果、更に高精度な探査が可能となり、探査深度が向上する。
【0022】
また、この発明の請求項3に係る探査システムによれば、センサー台にジンバル構造が採用されているため、受信センサーの揺れが更に低減し、探査精度が更に向上する。
【0023】
また、この発明の請求項4に係る探査システムによれば、微弱な信号を受信する際には受信センサーは姿勢計よりも通常重くなるため、その重い受信センサーをジンバル構造の下面に設けることによって、ジンバル構造の不要な揺れを低減でき、探査精度が更に向上する。
【0024】
また、この発明の請求項5に係る探査システムによれば、受信センサーの揺れによって生じるノイズ信号の予測値を取得しているため、当該予測値だけに測定ノイズ除去などの必要な処理が実行できる。従って、受信信号に含まれるノイズ信号を確実に除去することができ、探査精度が向上する。
【0025】
また、この発明の請求項6乃至請求項8に係る探査システムによれば、受信センサーの揺れによって生じるノイズ信号の予測値の周波数特性を、当該受信センサーでの周波数特性に補正している。そのため、受信信号に含まれるノイズ信号を確実に除去することができる。
【発明を実施するための最良の形態】
【0026】
<全体の構成>
図1は、この発明の実施の形態に係る探査システムの構成を示す図である。本実施の形態に係る探査システムは、例えば、グランドソース型空中電磁探査法を用いて地下探査を行う探査システムである。図1に示されるように、地表に設置された送信器11には2本の送信線が直線状に接続されており、それぞれの端には電極8,9が設けられている。電極8,9は、その一部が地中に埋められている。そして空中にはヘリコプタ1が、「バード」と呼ばれる空中曳航体7を吊り下げた状態で飛行している。従って、空中曳航体7はヘリコプタ1によって空中で曳航される。本実施の形態では、空中曳航体7には後述する受信センサー25が搭載されており、当該受信センサー25によって、送信器11から送信された電磁波により地殻に発生した誘導電磁場を受信する。
【0027】
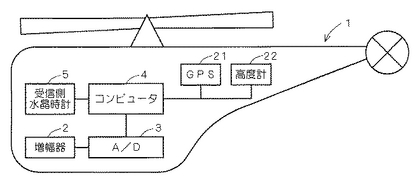
図1において、座標軸X,Yは地表と平行な面内における互いに直交する座標軸であり、Z軸は地表と垂直な方向の位置(すなわち、地表からの高さ)を示す。ここで地表に設置する送信器11の位置は、予め測定可能である。これに対し、受信センサー25を搭載した空中曳航体7を曳航するヘリコプタ1は空中を移動するため、常時位置情報を取得する必要がある。従って、当該ヘリコプタ1には、人工衛星からの情報を受信し、リアルタイムで絶対的な位置を認識することができるGPS(Global Positioning System)受信機21を搭載している。なお、GPS受信機21によって認識できるのは、平面的な位置(X−Y平面上の位置)であるため、高さ(Z軸)の情報については、ヘリコプタ1に搭載された高度計22によって得ることが可能である。このようにして求めたヘリコプタ1の位置と送信器11の位置とから、ヘリコプタ1と送信器11との相対的位置関係が求められる。
【0028】
<空中曳航体の構造>
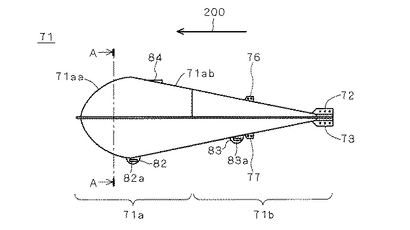
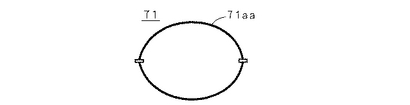
本実施の形態に係る空中曳航体7は、本体部71と、その尾部71bを取り囲む筒状の安定翼90とを備えている。図2は空中曳航体7の本体部71の構造を示す側面図であって、図3は図2中の矢視A−Aにおける断面図である。また図4は、空中曳航体7の本体部71を上方から見た際の平面図である。図2〜4に示されるように、本実施の形態に係る本体部71の形状は、後方に向かって、つまり空中曳航体7の曳航方向(進行方向)200とは反対方向に向かって細くなる水滴型である。そして、図3に示されるように、本体部71では、曳航方向200に垂直な上下方向に沿った断面形状は左右方向に長い紡錘形である。なお本実施の形態では、上面視上において曳航方向200を時計回りに90°回転して得られる方向を右方向とし、反時計回りに90°回転して得られる方向を左方向とする。
【0029】
本体部71は、頭部71aと尾部71bとで構成されている。頭部71aは、断面が紡錘形で前方に向かって突出する略半球状部分71aaと、断面が紡錘形で後方に向かって細くなる略円錐台状部分71abとで構成されており、その内部には、受信センサー25等が搭載されるセンサー台100が収納される。尾部71bは、断面が紡錘形であり、その外形は後方に向かって細くなる略円錐状である。
【0030】
尾部71bの後端には、上方向に突出する垂直尾翼72と、下方向に突出する垂直尾翼73と、右方向に突出する水平尾翼74と、左方向に突出する水平尾翼75とが設けられている。尾部71bの上面には上方向に突出する垂直翼76が、下面には下方向に突出する垂直翼77が設けられており、側面視上において、垂直翼76,77は上下方向に並んで配置されている。そして、尾部71bの下面には、垂直翼77よりもやや前方に、空中曳航体7をヘリコプタ1で吊す際に使用される帯状の吊り具95aの取付部83が設けられている。また、尾部71bの右側面及び左側面にも当該吊り具95aの取付部80,81がそれぞれ設けられている。取付部80,81,83には、吊り具95aが挿入される挿入孔80a,81a,83aがそれぞれ設けられている。図4に示されるように、上面視上では、挿入孔80a,81aは左右方向に並んで配置されている。また、側面視上では、各挿入孔80a,81aと、挿入孔83aとは上下方向に並んで配置されている。
【0031】
頭部71aの上面には、空中曳航体7内の受信センサー25の出力信号などをヘリコプタ1内の機器に伝送するためのケーブルを引き出す引き出し孔84が設けられている。頭部71aの右側面、左側面及び下面には、上記吊り具95aとは別の吊り具95bの取付部78,79,82がそれぞれ設けられており、取付部78,79,82には当該吊り具95bを挿入する挿入孔78a,79a,82aがそれぞれ設けられている。図4に示されるように、上面視上では、挿入孔78a,79aは、略半球状部分71aaの外形が成す半円の中心Oを通って左右方向に延びる仮想直線300上に配置されている。また、側面視上では、各挿入孔78a,79aと、挿入孔82aとは上下方向に並んで配置されている。
【0032】
上記引き出し孔84は、上面視上で挿入孔78a,79aよりもやや後方に配置されている。上面視上では、垂直尾翼72と、垂直翼76と、引き出し孔84と、上記中心Oとは、曳航方向200に沿って直線的に配置されている。また底面視上では、垂直尾翼73と、垂直翼77と、取付部82,83と、中心Oとは、曳航方向200に沿って直線的に配置されている。
【0033】
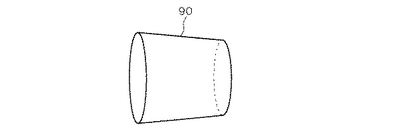
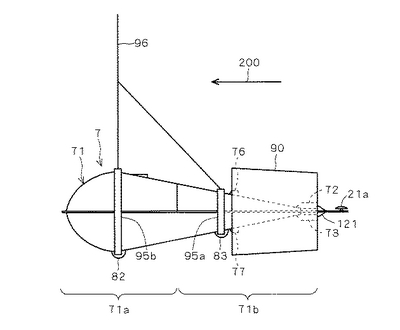
図5は空中曳航体7の安定翼90の構造を示す斜視図である。図5に示されるように、安定翼90は例えば円筒形であり、一方端に向かって細くなっている。図6は、曳航状態における空中曳航体7の様子を示す側面図である。図6に示されるように、筒状の安定翼90は、垂直尾翼72,73や水平尾翼74,75等を利用して、ワイヤ等で本体部71の尾部71bを取り囲むように空中曳航体7に取り付けられており、曳航方向200とは反対方向に向かって細くなっている。そして、本体部71の尾部71bの後端には、取付治具121を介してGPSアンテナ21aが取り付けられている。帯状の吊り具95aは、尾部71bの一部を取り巻くように取付部80,81,83に取り付けられ、同じく帯状の吊り具95bは頭部71aの一部を取り巻くように取付部78,79,82に取り付けられている。そして、各吊り具95a,95bにメインロープ96が取り付けられて、このメインロープ96によって空中曳航体7がヘリコプタ1に吊り下げられる。
【0034】
<センサー台の構造及びそれに取り付けられるセンサーの構成>
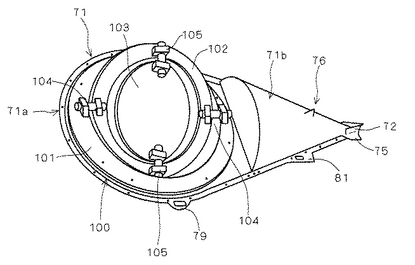
図7は本体部71に取り付けられた状態でのセンサー台100の構造を示す斜視図であって、図8はセンサー台100に取り付けられるセンサーの構成を示す図である。頭部71aを形成する上半分のハウジングは本体部71から取り外すことが可能であり、図7では当該ハウジングが取り外された状態での本体部71が示されている。
【0035】
図7に示されるように、本実施の形態に係るセンサー台100はジンバル構造を有するセンサー台であって、頭部71aを形成する下半分のハウジングにセンサー台100を取り付けるための取付枠101と、枠体102と、各種センサーが取り付けられる載置板103とを備えている。取付枠101、枠体102及び載置板103のそれぞれは円形であって、この順に半径が小さくなっている。枠体102は取付枠101の内側に中心が一致するように配置され、それらの中心を通る、曳航方向200に沿った軸を回動軸として回動するように取付治具104によって取付枠101に取り付けられている。また、載置板103は、枠体102の内側に中心が一致するように配置され、それらの中心を通る、左右方向に沿った軸を回動軸として回動するように取付治具105によって枠体102に取り付けられている。
【0036】
載置板103の下面には、図8に示されるように、探査対象に関する情報(以後、「探査情報」と呼ぶ)を含んだ誘導電磁場を検出する受信センサー25が取り付けられ、その上面には、受信センサー25の姿勢を計測する姿勢計23と、地球磁場を検出して受信センサー25の方位を計測する方位計24とが取り付けられる。受信センサー25は、例えばインダクション型の3軸磁場センサーである。姿勢計23は、受信センサー25のピッチ角α、ロール角β及びZ軸周りの回転角γを検出して、これらを当該受信センサー25の姿勢情報として出力する。方位計24は、MI(Magnetic−Impedance)センサーを3つ備えており、これらのMIセンサーで地球磁場の各成分を検出して受信センサー25の方位情報を出力する。
【0037】
本実施の形態に係るセンサー台100は、以上のようなジンバル構造を備えているため、各種センサーが取り付けられる載置板103は、その中心を通る、左右方向に沿った軸を回動軸として回動することができるとともに、枠体102も回動することから、当該中心を通る、曳航方向200に沿った軸を回動軸として回動することができる。従って、空中曳航体7に曳航方向200を軸にして回動するような揺れが生じた場合や、左右方向を軸にして回動するような揺れが生じた場合には、載置板103が相対的に回動することによって各種センサーは揺れ難くなる。
【0038】
<飛行物体に搭載する機器の構成>
図9は、この発明の飛行物体に搭載する機器の構成図である。ヘリコプタ1内には増幅器2が搭載され、受信センサー25、姿勢計23及び方位計24の出力はそれぞれ当該増幅器2で増幅される。増幅器2の出力はアナログ信号であるため、A/D変換装置3によってデジタル信号に変換される。デジタル化された各信号は、コンピュータ4に入力され、記録及び解析が行われる。また、コンピュータ4には、地表に設置された送信器11と同期させるために、受信側水晶時計5が接続されている。また、先述のGPS受信機21及び高度計22もヘリコプタ1に搭載されており、必要に応じてコンピュータ4に接続される。
【0039】
<地表に設置する機器の構成>
図10は、この発明において地表に設置する機器の構成図である。送信器11には2本の送信線10が接続されており、その他端には電極8,9が設けられている。図に示すように電極8,9の一部は地中に埋められている。また、送信器11には、昇圧トランス13が接続され、さらに、昇圧トランス13には発電機14が接続されており、電力供給源となっている。すなわち、発電機14により発生した電気を、昇圧トランス13により高電圧にする。そして、送信線10及び電極8,9を通じて大地に対し、高電圧の電流を流すことにより遠方まで届く電磁波を発生させることができる。そしてさらに、送信器11には、飛行物体に設置された機器と同期を得るための送信側水晶時計12が接続されている。なお、送信側(地表)と受信側(飛行物体)を同期させるために、それぞれの水晶時計を予め同一に設定しておく。
【0040】
<A/D変換装置の構成>
本実施の形態では、A/D変換装置3は複数台のA/D変換器を備えており、それらを交互に使用することによって、アナログ入力信号の全波形をデジタル信号に変換することができる。例えば、A/D変換装置3が2台のA/D変換器を備えている場合、コンピュータ4は、一方のA/D変換器が入力信号をA/D変換している間に、他方のA/D変換器から出力されるデジタルデータをメモリ内に記憶し、他方のA/D変換器が入力信号をA/D変換している間に、一方のA/D変化器から出力されるデジタルデータをメモリ内に記憶する。これにより、入力信号を途切れなくA/D変換処理することができる。従って、コンピュータ4は、受信センサー25での受信信号や、姿勢計23から出力されるピッチ角α、ロール角β及び回転角γの信号についての全波形情報を用いて、解析処理を行うことができる。
【0041】
<地下構造の探査方法>
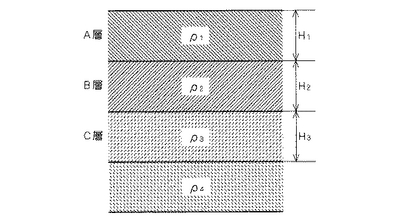
送信器11により電磁波が送信され地下内部の地殻によって誘導電磁場が発生するが、ヘリコプタ1より吊り下げられた空中曳航体7内の受信センサー25によって観測されるのは、X軸方向、Y軸方向及びZ軸方向の3つの磁場成分である。このうち、解析にはZ軸方向の磁場成分、つまり垂直磁場を利用し、図11に示すような地下構造を導く。図11は、地下構造が水平層構造である場合の地下断面図であるが、観測対象は水平層構造に限られない。図11において、ρ1,ρ2,ρ3はそれぞれA層,B層,C層の比抵抗であり、その単位は[Ωm]である。また、H1,H2,H3は、それぞれA層,B層,C層の厚さ(深さ)を示している。時刻tに観測される垂直磁場をHZ(t)とすると、一般に、垂直磁場HZ(t)は以下の式(1)で表される。
【0042】
【数1】

【0043】
ここで、x,y,zは受信センサー25の位置する座標を示し、f(a)はaについての関数であることを示す。
【0044】
従って、必要な個数のデータを収集して式(1)に代入し、それによって得られる連立方程式を数値的に解くことによって地下構造が明らかになる。
【0045】
実際に送信器11から送る信号を図12に示す。図12は、送信線10を介して電極8,9に流す電流波形と送信側水晶時計12のタイミングを示す図である。図のTは電流信号を示し、CLKはタイミング信号を示す。送信側水晶時計12からタイミング信号が入ると同時に、送信器11は電極8,9に大電流を流す。そして数秒間程度電流を流し、次に送信側水晶時計12からタイミング信号が入ると電流は流れなくなる。すなわち、図12に示すような矩形波電流を流すことにより、直線状に並んだ2本の送信線がダイポールアンテナとして機能し、電磁波を瞬間的に発生させたり、消滅させたりする。ここで、電流が流れない時間は、受信側の応答性を考慮して、数秒程度は必要である。このように地表に設置された機器では、図12のような矩形波的な操作(ON/OFF動作)を繰り返して行う。また、1パルスごとに極性を反転させて、電流を流してもよい。
【0046】
そして、地下内部の地殻によって誘導電磁場が発生し、先述のように、このうち垂直磁場をヘリコプタ1に吊り下げられた空中曳航体7内の受信センサー25によって観測する。
【0047】
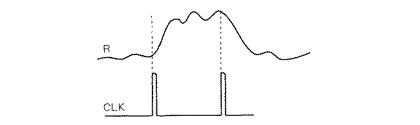
図13は、受信センサー25での受信信号と受信側水晶時計5のタイミングを示す図である。図に示す、Rは受信センサー25で受信した受信信号の増幅器2での増幅後の信号であり、CLKは受信側水晶時計5のタイミング信号である。なお、図12のCLKのタイミングと、図13のCLKのタイミングは同一時間である。
【0048】
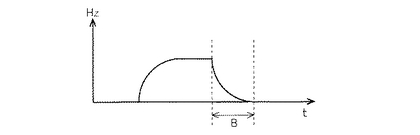
増幅器2から出力される受信信号Rには、受信センサー25の揺れによってノイズ信号が含まれる。つまり、受信センサー25が地球磁場の中で動くと、当該受信センサー25はその揺れを磁場変動として捕らえて、その変動磁場がノイズ信号として受信信号Rに現れる。以後、このノイズ信号を「揺れノイズ信号」と呼ぶ。従って、受信信号Rに対してそのまま後の処理を行っても正確な地下構造は把握できない。そのため、空中曳航体7に搭載された姿勢計23での計測結果データをコンピュータ4に読み込み、コンピュータ4は、図13に示す受信信号Rのデジタル化された信号と、姿勢計23から得られたデータから、受信した垂直磁場信号の補正を行う。この結果得られる情報は、図14のようになる。図14は、時間と補正後の垂直磁場との関係を示す図である。図14の関係で、地下構造の解析に重要な部分が図のBの過渡応答を示す部分である。地下構造が異なれば、この過渡応答を示す波形も異なる。しかし、その他の定常状態においては、地下構造にかかわらず、同一であるので地下構造の解析には重要でない。従って、図14のように補正を行った後、Bの部分のように過渡応答を示している部分のみを解析対象とする。
【0049】
図14のBの部分について、初期時刻t=0とし、Δtごとにサンプリングすると、上記式(1)より、以下の式(2)〜(4)が得られる。
【0050】
【数2】
【0051】
ここで座標(x0,y0,z0),(x1,y1,z1),(x2,y2,z2)はヘリコプタ1に搭載されたGPS受信機21及び高度計22などから求められるため、式(2)から式(4)の数式からなる連立方程式を数値的に解くことによって、探査情報を取得することができる。すなわち、図11に示す各層の比抵抗及び各層の厚さが得られる。なお、サンプリング数は上記の場合は3個であるが、これは説明を簡便にするためであり、実際の解析の場合は、必要数のサンプリングを行い、式(1)に代入すればよい。
【0052】
<座標値算出の方法>
上記の処理において、GPS受信機21よび高度計22を使用した座標値xi,yi,zi(i=0,1,…)の算出の方法の例について説明する。
【0053】
座標算出においては、地表の所定位置を原点とし、高さ方向に座標軸Zをとる。水平方向の座標軸は、例えば電極8,9を相互に結ぶ線分の方向をY軸とし、水平面内でそれに垂直な方向をX軸とすることができる。この送信側の座標値(xT,yT,zT)は例えば電極8,9の中間点の座標値であり、これは予め地表で観測するか、あるいは地形図から知ることができる。
【0054】
そして、ヘリコプタ1のGPS受信機21で観測した緯度・経度をXY方向に換算して、時刻(i・Δt)におけるヘリコプタ1の現在の座標値xHi,yHiを求め、高度計22の出力から座標値zHiを求める。
【0055】
これらの座標値がこのようにして求められた後は、それらの差の演算:
【0056】
【数3】
【0057】
によって、式(2)から式(4)の座標値(xi,yi,zi)を、(i・Δt)のそれぞれの時刻について知ることができる。
【0058】
<受信信号の補正方法>
上述の特許文献1では、揺れノイズ信号を除去するために、傾斜計で得られた受信センサーの傾斜情報に基づいて受信信号の補正を行っている。例えば、傾斜計が検出する受信センサーの傾斜が水平面からの傾きθで表される場合、受信した垂直磁場信号をcosθで除算することによって補正している。しかしながら、この方法では、傾斜計での測定ノイズを除去するために補正後の垂直磁場信号に対してフィルタリング処理を実行しようとすると、当該垂直磁場信号に含まれる、探査情報を含む信号の波形を歪めてしまい、探査精度が劣化する可能性がある。
【0059】
そこで、本発明では、受信信号に含まれる揺れノイズ信号を予測して、その予測値を受信信号から差し引くことによって受信信号に対する補正を行う。これにより、予測値に対してのみ、測定ノイズ除去などの必要な処理を実行できるため、受信信号に含まれる探査情報を含む信号の波形を歪めることなく、揺れノイズ信号を確実に除去できる。以下に本発明に係る補正方法について詳細に説明する。
【0060】
図15は受信信号の補正方法を示すフローチャートである。図15に示されるように、ステップs1では、コンピュータ4が、姿勢計23から出力されるピッチ角α、ロール角β及び回転角γを取得して記憶する。そして、ステップs2において、コンピュータ4は、取得したピッチ角α、ロール角β及び回転角γに基づいて、受信信号に含まれる揺れノイズ信号の予測値を求める。
【0061】
次に、ステップs3において、コンピュータ4は、揺れノイズ信号の予測値の周波数特性を、受信センサー25での周波数特性に補正し、ステップs4において、補正後の予測値を受信信号から差し引く。そして、コンピュータ4は、上記式(1)を使用して、補正後の予測値が差し引かれた受信信号のうちの垂直磁場成分に基づいて、比抵抗等の探査情報を取得する。
【0062】
通常、姿勢計23の周波数特性と受信センサー25の周波数特性とは異なるため、姿勢計23での計測結果から求めた揺れノイズ信号の予測値をそのまま受信信号から差し引いても、受信信号に含まれる揺れノイズ信号を十分に除去できない可能性がある。そこで、ステップs3のように、ステップs2で求めた予測値を受信センサー25での周波数特性に補正し、ステップs4において、補正後の予測値を受信信号から差し引くことによって、受信信号Rに含まれる揺れノイズ信号を確実に除去することができる。
【0063】
以上のように、コンピュータ4は、受信信号に含まれる揺れノイズ信号の予測値を求める揺れノイズ予測部として機能するとともに、当該予測値の周波数特性を補正する周波数特性補正部として機能する。そして、コンピュータ4は、補正後の予測値が差し引かれた受信信号に基づいて探査情報を取得する探査情報取得部としても機能する。
【0064】
なお、上述のステップs1〜s4までの処理で取り扱われる各データは、A/D変換装置3でA/D変換処理された後のデジタルデータである。
【0065】
<揺れノイズ信号の予測値の算出方法>
次に、上記ステップs2における揺れノイズ信号の予測値の算出方法について詳細に説明する。図16は、揺れノイズ信号の予測値の算出方法を説明するための図である。図16において、座標軸Xo,Yo,Zoで表される直交座標系は基準となる固定座標系(以後、「基準座標系」と呼ぶ)であり、座標軸Xt,Yt,Ztで表される直交座標系は、時刻tにおける受信センサー25での受信磁場の各成分を表す座標系(以後、「受信センサー座標系」と呼ぶ)である。
【0066】
揺れノイズ信号は、受信センサー座標系が、受信センサー25の揺れによって基準座標系から変動することによって生じると考えることができる。従って、基準座標系での地球磁場Heの値を、受信センサー座標系での値に座標変換することによって、揺れノイズ信号を予測することができる。
【0067】
受信センサー25での受信信号に含まれるであろう地球磁場Heの信号、つまり揺れノイズ信号のXt軸成分、Yt軸成分及びZt軸成分の時刻tにおける値を、それぞれhaxn(t),hayn(t),hazn(t)とし、時刻tにおいて姿勢計23から出力されるピッチ角α、ロール角β及び回転角γをそれぞれα(t)、β(t)及びγ(t)とし、基準座標系での地球磁場HeのXo軸成分、Yo軸成分及びZo軸成分をそれぞれhxm(t0)、hym(t0)及びhzm(t0)とすると、haxn(t)、hayn(t)及びhazn(t)は、座標変換の式を用いて以下の式(5)〜(7)で表される。
【0068】
【数4】
【0069】
ここで、fx(a)、fy(a)及びfz(a)のそれぞれは、aについての関数であることを示す。また、図16に示されるように、ピッチ角α(t)は、XoYo平面からのXt軸の傾斜角であって、ロール角β(t)は、XoYo平面からのYt軸の傾斜角である。そして、回転角γ(t)は、Xt軸をXoYo平面に投影して得られる軸と、Xo軸とが成す角度である。
【0070】
本実施の形態では、hxm(t0)、hym(t0)及びhzm(t0)の値として、方位計24内の3つのMIセンサーで得られる地球磁場HeのXYZ成分の値をそれぞれ使用する。
【0071】
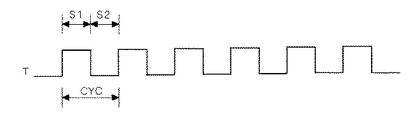
コンピュータ4は、空中曳航体7が探査領域の上空に到達し、送信器11から図17に示されるような送信信号が出力されると、パルス信号が出力されている期間S1と、出力されていない期間S2とを測定サイクルCYCとして、当該測定サイクルCYC中に姿勢計23から出力されるピッチ角α(t)、ロール角β(t)及び回転角γ(t)を取得して記憶する。同時に、コンピュータ4は、測定サイクルCYC中のパルス信号が出力されていない期間S2において、方位計24から出力される地球磁場Heの各成分の値を取得して記憶する。
【0072】
次に、コンピュータ4は、方位計24からの地球磁場Heの各成分の値をhxm(t0)、hym(t0)及びhzm(t0)として式(5)〜(7)に代入する。そして、コンピュータ4は、取得したピッチ角α(t)、ロール角β(t)及び回転角γ(t)を式(5)〜(7)に代入して、haxn(t)、hayn(t)及びhazn(t)を求める。これにより、測定サイクルCYC中の各時刻における揺れノイズ信号の予測値のXYZ成分が求まる。コンピュータ4は、この動作を測定サイクルCYCごとに繰り返して実行する。従って、hxm(t0)、hym(t0)及びhzm(t0)は、測定サイクルCYCごとに更新されることになる。
【0073】
<揺れノイズ信号の予測値の周波数特性補正方法>
次に、図15のステップs3における周波数特性補正方法について説明する。コンピュータ4は、空中曳航体7が探査領域の上空に到達すると、地下探査を開始する前に、式(5)〜(7)を用いて、送信器11からパルス信号が出力されていない状態でのhaxn(t)、hayn(t)及びhazn(t)を求める。同時に、この状態において、受信センサー25での受信信号を取得する。このときの受信信号のXYZ成分を、それぞれhrx(t)、hry(t)及びhrz(t)とする。
【0074】
次にコンピュータ4は、haxn(t)とhrx(t)との関係を示す伝達関数Hcx(ω)と、hayn(t)とhry(t)との関係を示す伝達関数Hcy(ω)と、hazn(t)とhrz(t)との関係を示す伝達関数Hcz(ω)とを求める。まず、コンピュータ4は、haxn(t)、hayn(t)及びhazn(t)に対してFFT(高速フーリエ変換処理)を実行して、それらを時間領域の信号から周波数領域の信号Haxn(ω)、Hayn(ω)及びHazn(ω)にそれぞれ変換する。また、コンピュータ4は、hrx(t)、hry(t)及びhrz(t)に対してもFFTを実行して、それらを周波数領域の信号Hrx(ω)、Hry(ω)及びHrz(ω)にそれぞれ変換する。そして、コンピュータ4は、Hrx(ω)をHaxn(ω)で除算した値をHcx(ω)とし、Hry(ω)をHayn(ω)で除算した値をHcy(ω)とし、Hrz(ω)をHazn(t)で除算した値をHcz(ω)とする。
【0075】
hrx(t)、hry(t)及びhrz(t)は、送信器11からパルス信号が送信されていない状態での受信信号であるため、これらの信号には、探査情報を含む誘導電磁場は含まれていない。従って、これらの信号には揺れノイズ信号しか含まれていないことになる。従って、Hcx(ω)、Hcy(ω)及びHcz(ω)は、姿勢計23での計測結果に基づいて算出された揺れノイズ信号の予測値と、受信センサー25で実測された揺れノイズ信号との関係を示す伝達関数である。
【0076】
コンピュータ4は、送信器11から図17に示されるような送信信号が出力されて地下探査が開始すると、上述のステップs2を実行して、haxn(t)、hayn(t)及びhazn(t)を求める。そして、求めたhaxn(t)、hayn(t)及びhazn(t)に対してFFTを実行して、Haxn(ω)、Hayn(ω)及びHazn(ω)を取得する。
【0077】
次にコンピュータ4は、取得したHaxn(ω)、Hayn(ω)及びHazn(ω)と、予め求めておいた伝達関数Hcx(ω)、Hcy(ω)及びHcz(ω)とを以下の式(8)〜(10)に代入して、Hbx(ω)、Hby(ω)及びHbz(ω)を求める。
【0078】
【数5】
【0079】
そして、コンピュータ4は、求めたHbx(ω)、Hby(ω)及びHbz(ω)に対して逆FFTを実行して、それらを時間領域の信号hbxn(t)、hbyn(t)及びhbzn(t)にそれぞれ変換する。このとき、Hbx(ω)、Hby(ω)及びHbz(ω)から、姿勢計23での測定ノイズと考えられる30Hz以上の高周波成分を除去して逆FFTを実行する。
【0080】
このようにして、揺れノイズ信号の予測値であるhaxn(t)、hayn(t)及びhazn(t)の周波数特性は、受信センサー25での周波数特性に補正され、補正後のそれらの信号はそれぞれhbxn(t)、hbyn(t)及びhbzn(t)となる。
【0081】
地下探査を実行している状態での受信センサー25での受信信号のXYZ成分をそれぞれhx(t)、hy(t)及びhz(t)とすると、コンピュータ4は、受信センサー25から取得したhx(t)、hy(t)及びhz(t)と、hbxn(t)、hbyn(t)及びhbzn(t)とを以下の式(11)〜(13)に代入して、hxs(t),hys(t)及びhzs(t)を求める。
【0082】
【数6】
【0083】
そして、そのうちのhzs(t)を上記式(1)中のHZ(t)として使用することによって、揺れノイズ信号が除去された垂直磁場信号に基づいて探査情報を取得することができる。
【0084】
<変形例>
これまでは、飛行物体がヘリコプタの場合について説明したが、これに限らず、先述の受信に必要な機器を搭載して飛行することが可能なその他の飛行物体でもよい。好ましくは、低速飛行や空中停止が可能なヘリコプタや飛行船が使用される。また、無人機も使用可能である。
【0085】
また、地下構造の解析の際には、上記のように式(5)〜(7)の連立方程式を解く方法の他に、フーリエ変換を利用して、受信信号Rに含まれる周波数成分を導き、それによって、地下構造を得る方法を採用してもよい。
【0086】
また、受信センサー25の高度値は、ヘリコプタ1自身に搭載されている飛行用の高度計の読みを利用して求めてもよい。地殻調査においては、ヘリコプタ1本体と受信センサー25とのわずかな高度差は調査結果に対する影響が少ないためである。
【0087】
さらに、観測を行う水平位置及び高度を予め設定しておく場合には、そのような位置や高度になった時に受信センサー25の出力を取り込むようにしておくこともできる。
【0088】
また、揺れノイズ信号の予測値の周波数特性については、伝達関数を使用して周波数領域で補正処理を行っていたが、適応フィルタを使用して時間領域で補正処理を行うことも可能である。以下にこの変形例について説明する。
【0089】
適応フィルタをトランスバーサルフィルタで構成した場合には、フィルタの次数をN、Ai,j(i=0,1,2,・・・,N)を入力信号のサンプル時点jT(T:サンプリング周期)におけるフィルタ係数とすると、フィルタの入力信号Xjと出力信号Yjとの関係は、一般的に以下の式(14)で表される。
【0090】
【数7】
【0091】
本実施の形態の変形例に係るコンピュータ4は、式(14)を用いて揺れノイズ信号の予測値の周波数特性を受信センサー25での周波数特性に補正する。
【0092】
コンピュータ4は、空中曳航体7が探査領域の上空に到達し、送信器11から上述の図17に示されるような送信信号が出力されると、測定サイクルCYC中に姿勢計23から出力されるピッチ角α(t)、ロール角β(t)及び回転角γ(t)を取得して記憶するとともに、測定サイクルCYC中での受信センサー25での受信信号を取得して記憶する。同時にコンピュータ4は、測定サイクルCYC中のパルス信号が出力されていない期間S2において、方位計24から出力される地球磁場Heの各成分の値を取得して記憶する。
【0093】
次に、コンピュータ4は、取得した方位計24からの地球磁場Heの各成分の値をhxm(t0)、hym(t0)及びhzm(t0)として式(5)〜(7)に代入するとともに、取得したピッチ角α(t)、ロール角β(t)及び回転角γ(t)を式(5)〜(7)に代入して、測定サイクルCYC中のhaxn(t)、hayn(t)及びhazn(t)を求める。
【0094】
次に、コンピュータ4は、パルス信号が出力されていない期間S2におけるhaxn(t)、hayn(t)及びhazn(t)と、当該期間S2における受信信号を使用してフィルタ係数Ai,jを決定する。まずコンピュータ4は、求めた期間S2におけるhaxn(t)を入力信号Xjとして式(14)に代入するとともに、取得した期間S2における受信信号のX成分を出力信号Yjとして式(14)に代入する。そして、得られた各時刻での入力信号Xjと出力信号Yjとの関係式からX成分についてのフィルタ係数Ai,jを決定する。フィルタ係数Ai,jは、例えば最小二乗法を用いて決定することができる。同様に、Y成分のフィルタ係数Ai,jは、期間S2におけるhayn(t)と、期間S2における受信信号のY成分とを式(14)に代入して得られる式から決定することができ、Z成分のフィルタ係数Ai,jは、期間S2におけるhazn(t)と、期間S2における受信信号のZ成分とを式(14)に代入して得られる式から決定することができる。
【0095】
次に、コンピュータ4は、求めたX成分のフィルタ係数Ai,jを式(14)に代入するとともに、測定サイクルCYC中のhaxn(t)を入力信号Xjとして式(14)に代入し、測定サイクルCYC中の各時刻におけるX成分の出力信号Yjを求める。このようにして、揺れノイズ信号の予測値であるhaxn(t)の周波数特性が受信センサー25での周波数特性に補正される。
【0096】
同様にして、求めたY成分のフィルタ係数Ai,jを式(14)に代入するとともに、測定サイクルCYC中のhayn(t)を入力信号Xjとして式(14)に代入し、測定サイクルCYC中の各時刻におけるY成分の出力信号Yjを求める。また、求めたZ成分のフィルタ係数Ai,jを式(14)に代入するとともに、測定サイクルCYC中のhazn(t)を入力信号Xjとして式(14)に代入し、測定サイクルCYC中の各時刻におけるZ成分の出力信号Yjを求める。そして、コンピュータ4は、求めた出力信号YjのうちZ成分の出力信号Yjを式(1)中のHZ(t)として使用する。
【0097】
コンピュータ4は、以上の動作を測定サイクルごとに実行し、揺れノイズ信号の予測値の周波数特性に対する補正処理を、適応フィルタを使用して時間領域で実行する。
【0098】
以上のように、本実施の形態に係る探査システムでは、空中曳航体7の本体部71が曳航方向200とは反対方向に向かって細くなる水滴型であるため、ヘリコプタ1が移動している際に当該本体部71の後方には空気の渦が発生し難くなる。従って、空中曳航体7の揺れを抑制できる。
【0099】
更に、筒状の安定翼90は曳航方向200とは反対方向に向かって細くなっているため、ヘリコプタ1が移動している際に筒状の安定翼90内を通過する風は尾部71bに衝突しながら後方に流れ易くなる。そのため、尾部71bには曳航方向200とは逆向きの力が発生しやすくなり、尾部71bが後方に引っ張れるようになる。従って、空中曳航体7が曳航方向200に向きやすくなり、空中曳航体7の揺れを更に抑制できる。その結果、受信センサー25の揺れによって受信信号内に発生するノイズ信号を確実に低減でき、高精度な探査が可能となり、探査深度が向上する。
【0100】
また、空中曳航体7の本体部71では、曳航方向200に垂直な方向に沿った断面形状が紡錘形であるため、空中曳航体7の揺れを更に低減できる。その結果、更に高精度な探査が可能となり、探査深度が向上する。
【0101】
また、本実施の形態では、センサー台100にジンバル構造が採用されているため、受信センサー25の揺れが更に低減し、探査精度が更に向上する。
【0102】
また、誘導電磁場等の微弱な信号を受信する際には受信センサー25は姿勢計23よりも通常重くなるため、本実施の形態のように、その重い受信センサー25をジンバル構造の下面に設けることによって、ジンバル構造の不要な揺れを低減でき、探査精度が更に向上する。
【0103】
また、本実施の形態では、揺れノイズ信号の予測値を取得しているため、当該予測値だけに測定ノイズ除去などの必要な処理が実行できる。従って、受信信号に含まれる揺れノイズ信号を確実に除去することができ、探査精度が向上する。
【0104】
また、揺れのノイズ信号の予測値の周波数特性を、受信センサー25での周波数特性に補正しているため、受信信号に含まれる揺れノイズ信号を確実に除去することができる。
【図面の簡単な説明】
【0105】
【図1】本発明の実施の形態に係る探査システムの構成を示す図である。
【図2】本発明の実施の形態に係る空中曳航体の本体部の構造を示す側面図である。
【図3】本発明の実施の形態に係る空中曳航体の本体部の構造を示す断面図である。
【図4】本発明の実施の形態に係る空中曳航体の本体部の構造を示す平面図である。
【図5】本発明の実施の形態に係る空中曳航体の安定翼の構造を示す斜視図である。
【図6】本発明の実施の形態に係る空中曳航体の曳航状態を示す側面図である。
【図7】本発明の実施の形態に係るセンサー台の構造を示す斜視図である。
【図8】本発明の実施の形態に係るセンサー台に取り付けられるセンサーの構成を示す側面図である。
【図9】本発明の実施の形態に係る飛行物体に搭載される機器の構成を示す図である。
【図10】本発明の実施の形態に係る探査システムにおいて地表に設置する機器の構成を示す図である。
【図11】地下構造が水平層構造である場合の地下断面図である。
【図12】送信線を介して電極に流す電流波形と送信側水晶時計のタイミングを示す図である。
【図13】増幅器で得られる受信信号と受信側水晶時計のタイミングを示す図である。
【図14】時間と、地殻によって発生する誘導電磁場の垂直磁場との関係を示す図である。
【図15】本発明の実施の形態に係る探査システムの動作を示すフローチャートである。
【図16】本発明の実施の形態に係る探査システムの動作を説明するための図である。
【図17】送信線を介して電極に流す電流波形を示す図である。
【符号の説明】
【0106】
1 ヘリコプタ、4 コンピュータ、7 空中曳航体、23 姿勢計、25 受信センサー、71 本体部、71a 頭部、71b 尾部、90 安定翼、100 センサー台、200 曳航方向。
【技術分野】
【0001】
本発明は、ヘリコプタ等の飛行物体に曳航される空中曳航体によって受信された受信信号に基づいて探査対象に関する情報を取得する探査システムに関する。
【背景技術】
【0002】
電磁波を利用して地下構造を探査する方法としては、従来より、地表に送信器と受信器を設置する方法と、飛行物体に送信器と受信器を設置する方法とが知られている。
【0003】
前者は、地表に設置した送信器から送信された電磁波により地殻に発生した誘導電磁波を、地表に設置した受信器により受信測定することにより、地殻構造を探査するCSAMT(Control Source Audio Magneto Telluric)法やTDEM(Time Domain ElectroMagnetic)法などである。
【0004】
後者は、ヘリコプタなどの飛行物体に送信器と受信器とが設置され、送信器から送信された電磁波により地殻に発生した誘導電磁場を受信器により受信測定し、地殻構造を探査する空中電磁探査法と呼ばれる方法である。
【0005】
前者の地表に送信器と受信器を設置する方法では、広域について測定を行う場合、測定点毎に受信器を移動し設置する必要があり、測定のために膨大な手間と時間が必要である。
【0006】
また、後者の飛行物体に送信器と受信器を設置し空中から送受信する方法では、測定は容易であるが、ヘリコプタなどの飛行物体に搭載することができる送信器や受信器の大きさおよび重量が制限される。送信器と受信器との間の距離が近いために、強力な電磁波を発信するができず探査することができる地殻の深度が限られる。
【0007】
そこで、このような課題を解決するために、送信器を地表に設置し、受信器を飛行物体に搭載することにより電磁波を利用して地下構造を探査するグランドソース型空中電磁探査法と呼ばれる方法が提案されている。この探査方法は例えば特許文献1,2及び非特許文献1に開示されている。
【0008】
【特許文献1】特開平9−304547号公報
【特許文献2】国際公開第92/19989号パンフレット
【非特許文献1】R. A. Bosschart et al., “Advances in Deep Penetration Airborne Electromagnetic Methods”, Exploration Geophysics, 24th IGC, section9, 1972, p37-48
【発明の開示】
【発明が解決しようとする課題】
【0009】
さて、空中電磁探査法では、地殻に発生する誘導電磁場を受信する受信センサーが、飛行物体から吊り下げられた「バード」と呼ばれる空中曳航体内に搭載されているため、当該受信センサーが曳航中に揺れやすく、この受信センサーの揺れによって発生するノイズ信号のために、十分な探査精度を得ることが困難であった。
【0010】
そこで、本発明は、上述の問題に鑑みて成されたものであり、探査精度を向上することが可能な探査技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
この発明の請求項1に係る探査システムは、探査対象に関する情報を含む信号を受信する受信センサーを有し、前記飛行物体に空中で曳航される空中曳航体とを備える探査システムであって、前記空中曳航体は、曳航方向とは反対方向に向かって細くなる水滴型の本体部と、前記本体部の尾部を取り囲み、前記曳航方向とは反対方向に向かって細くなる筒状の安定翼とを備える。
【0012】
また、この発明の請求項2に係る探査システムは、請求項1に記載の探査システムであって、前記空中曳航体の前記本体部では、前記曳航方向に垂直な方向に沿った断面形状が紡錘形である。
【0013】
また、この発明の請求項3に係る探査システムは、請求項1及び請求項2のいずれか一つに記載の探査システムであって、前記空中曳航体における前記本体部の頭部内には、前記受信センサーが搭載され、その揺れを抑制するジンバル構造を有するセンサー台が設けられている。
【0014】
また、この発明の請求項4に係る探査システムは、請求項3に記載の探査システムであって、前記頭部内には、前記受信センサーの姿勢を検出する姿勢計が設けられており、前記姿勢計は、前記ジンバル構造の上面に取り付けられており、前記受信センサーは、前記ジンバル構造の下面に取り付けられている。
【0015】
また、この発明の請求項5に係る探査システムは、請求項1乃至請求項3のいずれか一つに記載の探査システムであって、前記空中曳航体における前記本体部の頭部内には、前記受信センサーの姿勢を計測する姿勢計が設けられており、前記受信センサーの揺れによって前記受信センサーでの受信信号に含まれるノイズ信号の予測値を、前記姿勢計での計測結果に基づいて求める揺れノイズ予測部と、前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する探査情報取得部とを更に備える。
【0016】
また、この発明の請求項6に係る探査システムは、請求項5に記載の探査システムであって、前記予測値の周波数特性を前記受信センサーでの周波数特性に補正する、周波数特性補正部を更に備え、前記探査情報取得部は、前記周波数特性補正部で補正された前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する。
【0017】
また、この発明の請求項7に係る探査システムは、請求項6に記載の探査システムであって、前記周波数特性補正部は、前記予測値と、前記受信センサーで測定された前記ノイズ信号との関係を示す伝達関数に基づいて、前記予測値を前記受信センサーでの周波数特性に補正する。
【0018】
また、この発明の請求項8に係る探査システムは、請求項6に記載の探査システムであって、前記周波数特性補正部は、適応フィルタを用いて前記予測値を前記受信センサーでの周波数特性に補正する。
【発明の効果】
【0019】
この発明の請求項1に係る探査システムによれば、空中曳航体の本体部が曳航方向とは反対方向に向かって細くなる水滴型であるため、飛行物体が移動している際に当該本体部の後方には空気の渦が発生し難くなる。従って、空中曳航体の揺れを抑制できる。
【0020】
更に、筒状の安定翼は曳航方向とは反対方向に向かって細くなっているため、飛行物体が移動している際に筒状の安定翼内を通過する風は尾部に衝突しながら後方に流れ易くなる。そのため、尾部には曳航方向とは逆向きの力が発生しやすくなり、尾部が後方に引っ張れるようになる。従って、空中曳航体が曳航方向に向きやすくなり、空中曳航体の揺れを更に抑制できる。その結果、受信センサーの揺れによって受信信号内に発生するノイズを確実に低減でき、高精度な探査が可能となり、探査深度が向上する。
【0021】
また、この発明の請求項2に係る探査システムによれば、空中曳航体の本体部では、曳航方向に垂直な方向に沿った断面形状が紡錘形であるため、更に空中曳航体の揺れを低減できる。その結果、更に高精度な探査が可能となり、探査深度が向上する。
【0022】
また、この発明の請求項3に係る探査システムによれば、センサー台にジンバル構造が採用されているため、受信センサーの揺れが更に低減し、探査精度が更に向上する。
【0023】
また、この発明の請求項4に係る探査システムによれば、微弱な信号を受信する際には受信センサーは姿勢計よりも通常重くなるため、その重い受信センサーをジンバル構造の下面に設けることによって、ジンバル構造の不要な揺れを低減でき、探査精度が更に向上する。
【0024】
また、この発明の請求項5に係る探査システムによれば、受信センサーの揺れによって生じるノイズ信号の予測値を取得しているため、当該予測値だけに測定ノイズ除去などの必要な処理が実行できる。従って、受信信号に含まれるノイズ信号を確実に除去することができ、探査精度が向上する。
【0025】
また、この発明の請求項6乃至請求項8に係る探査システムによれば、受信センサーの揺れによって生じるノイズ信号の予測値の周波数特性を、当該受信センサーでの周波数特性に補正している。そのため、受信信号に含まれるノイズ信号を確実に除去することができる。
【発明を実施するための最良の形態】
【0026】
<全体の構成>
図1は、この発明の実施の形態に係る探査システムの構成を示す図である。本実施の形態に係る探査システムは、例えば、グランドソース型空中電磁探査法を用いて地下探査を行う探査システムである。図1に示されるように、地表に設置された送信器11には2本の送信線が直線状に接続されており、それぞれの端には電極8,9が設けられている。電極8,9は、その一部が地中に埋められている。そして空中にはヘリコプタ1が、「バード」と呼ばれる空中曳航体7を吊り下げた状態で飛行している。従って、空中曳航体7はヘリコプタ1によって空中で曳航される。本実施の形態では、空中曳航体7には後述する受信センサー25が搭載されており、当該受信センサー25によって、送信器11から送信された電磁波により地殻に発生した誘導電磁場を受信する。
【0027】
図1において、座標軸X,Yは地表と平行な面内における互いに直交する座標軸であり、Z軸は地表と垂直な方向の位置(すなわち、地表からの高さ)を示す。ここで地表に設置する送信器11の位置は、予め測定可能である。これに対し、受信センサー25を搭載した空中曳航体7を曳航するヘリコプタ1は空中を移動するため、常時位置情報を取得する必要がある。従って、当該ヘリコプタ1には、人工衛星からの情報を受信し、リアルタイムで絶対的な位置を認識することができるGPS(Global Positioning System)受信機21を搭載している。なお、GPS受信機21によって認識できるのは、平面的な位置(X−Y平面上の位置)であるため、高さ(Z軸)の情報については、ヘリコプタ1に搭載された高度計22によって得ることが可能である。このようにして求めたヘリコプタ1の位置と送信器11の位置とから、ヘリコプタ1と送信器11との相対的位置関係が求められる。
【0028】
<空中曳航体の構造>
本実施の形態に係る空中曳航体7は、本体部71と、その尾部71bを取り囲む筒状の安定翼90とを備えている。図2は空中曳航体7の本体部71の構造を示す側面図であって、図3は図2中の矢視A−Aにおける断面図である。また図4は、空中曳航体7の本体部71を上方から見た際の平面図である。図2〜4に示されるように、本実施の形態に係る本体部71の形状は、後方に向かって、つまり空中曳航体7の曳航方向(進行方向)200とは反対方向に向かって細くなる水滴型である。そして、図3に示されるように、本体部71では、曳航方向200に垂直な上下方向に沿った断面形状は左右方向に長い紡錘形である。なお本実施の形態では、上面視上において曳航方向200を時計回りに90°回転して得られる方向を右方向とし、反時計回りに90°回転して得られる方向を左方向とする。
【0029】
本体部71は、頭部71aと尾部71bとで構成されている。頭部71aは、断面が紡錘形で前方に向かって突出する略半球状部分71aaと、断面が紡錘形で後方に向かって細くなる略円錐台状部分71abとで構成されており、その内部には、受信センサー25等が搭載されるセンサー台100が収納される。尾部71bは、断面が紡錘形であり、その外形は後方に向かって細くなる略円錐状である。
【0030】
尾部71bの後端には、上方向に突出する垂直尾翼72と、下方向に突出する垂直尾翼73と、右方向に突出する水平尾翼74と、左方向に突出する水平尾翼75とが設けられている。尾部71bの上面には上方向に突出する垂直翼76が、下面には下方向に突出する垂直翼77が設けられており、側面視上において、垂直翼76,77は上下方向に並んで配置されている。そして、尾部71bの下面には、垂直翼77よりもやや前方に、空中曳航体7をヘリコプタ1で吊す際に使用される帯状の吊り具95aの取付部83が設けられている。また、尾部71bの右側面及び左側面にも当該吊り具95aの取付部80,81がそれぞれ設けられている。取付部80,81,83には、吊り具95aが挿入される挿入孔80a,81a,83aがそれぞれ設けられている。図4に示されるように、上面視上では、挿入孔80a,81aは左右方向に並んで配置されている。また、側面視上では、各挿入孔80a,81aと、挿入孔83aとは上下方向に並んで配置されている。
【0031】
頭部71aの上面には、空中曳航体7内の受信センサー25の出力信号などをヘリコプタ1内の機器に伝送するためのケーブルを引き出す引き出し孔84が設けられている。頭部71aの右側面、左側面及び下面には、上記吊り具95aとは別の吊り具95bの取付部78,79,82がそれぞれ設けられており、取付部78,79,82には当該吊り具95bを挿入する挿入孔78a,79a,82aがそれぞれ設けられている。図4に示されるように、上面視上では、挿入孔78a,79aは、略半球状部分71aaの外形が成す半円の中心Oを通って左右方向に延びる仮想直線300上に配置されている。また、側面視上では、各挿入孔78a,79aと、挿入孔82aとは上下方向に並んで配置されている。
【0032】
上記引き出し孔84は、上面視上で挿入孔78a,79aよりもやや後方に配置されている。上面視上では、垂直尾翼72と、垂直翼76と、引き出し孔84と、上記中心Oとは、曳航方向200に沿って直線的に配置されている。また底面視上では、垂直尾翼73と、垂直翼77と、取付部82,83と、中心Oとは、曳航方向200に沿って直線的に配置されている。
【0033】
図5は空中曳航体7の安定翼90の構造を示す斜視図である。図5に示されるように、安定翼90は例えば円筒形であり、一方端に向かって細くなっている。図6は、曳航状態における空中曳航体7の様子を示す側面図である。図6に示されるように、筒状の安定翼90は、垂直尾翼72,73や水平尾翼74,75等を利用して、ワイヤ等で本体部71の尾部71bを取り囲むように空中曳航体7に取り付けられており、曳航方向200とは反対方向に向かって細くなっている。そして、本体部71の尾部71bの後端には、取付治具121を介してGPSアンテナ21aが取り付けられている。帯状の吊り具95aは、尾部71bの一部を取り巻くように取付部80,81,83に取り付けられ、同じく帯状の吊り具95bは頭部71aの一部を取り巻くように取付部78,79,82に取り付けられている。そして、各吊り具95a,95bにメインロープ96が取り付けられて、このメインロープ96によって空中曳航体7がヘリコプタ1に吊り下げられる。
【0034】
<センサー台の構造及びそれに取り付けられるセンサーの構成>
図7は本体部71に取り付けられた状態でのセンサー台100の構造を示す斜視図であって、図8はセンサー台100に取り付けられるセンサーの構成を示す図である。頭部71aを形成する上半分のハウジングは本体部71から取り外すことが可能であり、図7では当該ハウジングが取り外された状態での本体部71が示されている。
【0035】
図7に示されるように、本実施の形態に係るセンサー台100はジンバル構造を有するセンサー台であって、頭部71aを形成する下半分のハウジングにセンサー台100を取り付けるための取付枠101と、枠体102と、各種センサーが取り付けられる載置板103とを備えている。取付枠101、枠体102及び載置板103のそれぞれは円形であって、この順に半径が小さくなっている。枠体102は取付枠101の内側に中心が一致するように配置され、それらの中心を通る、曳航方向200に沿った軸を回動軸として回動するように取付治具104によって取付枠101に取り付けられている。また、載置板103は、枠体102の内側に中心が一致するように配置され、それらの中心を通る、左右方向に沿った軸を回動軸として回動するように取付治具105によって枠体102に取り付けられている。
【0036】
載置板103の下面には、図8に示されるように、探査対象に関する情報(以後、「探査情報」と呼ぶ)を含んだ誘導電磁場を検出する受信センサー25が取り付けられ、その上面には、受信センサー25の姿勢を計測する姿勢計23と、地球磁場を検出して受信センサー25の方位を計測する方位計24とが取り付けられる。受信センサー25は、例えばインダクション型の3軸磁場センサーである。姿勢計23は、受信センサー25のピッチ角α、ロール角β及びZ軸周りの回転角γを検出して、これらを当該受信センサー25の姿勢情報として出力する。方位計24は、MI(Magnetic−Impedance)センサーを3つ備えており、これらのMIセンサーで地球磁場の各成分を検出して受信センサー25の方位情報を出力する。
【0037】
本実施の形態に係るセンサー台100は、以上のようなジンバル構造を備えているため、各種センサーが取り付けられる載置板103は、その中心を通る、左右方向に沿った軸を回動軸として回動することができるとともに、枠体102も回動することから、当該中心を通る、曳航方向200に沿った軸を回動軸として回動することができる。従って、空中曳航体7に曳航方向200を軸にして回動するような揺れが生じた場合や、左右方向を軸にして回動するような揺れが生じた場合には、載置板103が相対的に回動することによって各種センサーは揺れ難くなる。
【0038】
<飛行物体に搭載する機器の構成>
図9は、この発明の飛行物体に搭載する機器の構成図である。ヘリコプタ1内には増幅器2が搭載され、受信センサー25、姿勢計23及び方位計24の出力はそれぞれ当該増幅器2で増幅される。増幅器2の出力はアナログ信号であるため、A/D変換装置3によってデジタル信号に変換される。デジタル化された各信号は、コンピュータ4に入力され、記録及び解析が行われる。また、コンピュータ4には、地表に設置された送信器11と同期させるために、受信側水晶時計5が接続されている。また、先述のGPS受信機21及び高度計22もヘリコプタ1に搭載されており、必要に応じてコンピュータ4に接続される。
【0039】
<地表に設置する機器の構成>
図10は、この発明において地表に設置する機器の構成図である。送信器11には2本の送信線10が接続されており、その他端には電極8,9が設けられている。図に示すように電極8,9の一部は地中に埋められている。また、送信器11には、昇圧トランス13が接続され、さらに、昇圧トランス13には発電機14が接続されており、電力供給源となっている。すなわち、発電機14により発生した電気を、昇圧トランス13により高電圧にする。そして、送信線10及び電極8,9を通じて大地に対し、高電圧の電流を流すことにより遠方まで届く電磁波を発生させることができる。そしてさらに、送信器11には、飛行物体に設置された機器と同期を得るための送信側水晶時計12が接続されている。なお、送信側(地表)と受信側(飛行物体)を同期させるために、それぞれの水晶時計を予め同一に設定しておく。
【0040】
<A/D変換装置の構成>
本実施の形態では、A/D変換装置3は複数台のA/D変換器を備えており、それらを交互に使用することによって、アナログ入力信号の全波形をデジタル信号に変換することができる。例えば、A/D変換装置3が2台のA/D変換器を備えている場合、コンピュータ4は、一方のA/D変換器が入力信号をA/D変換している間に、他方のA/D変換器から出力されるデジタルデータをメモリ内に記憶し、他方のA/D変換器が入力信号をA/D変換している間に、一方のA/D変化器から出力されるデジタルデータをメモリ内に記憶する。これにより、入力信号を途切れなくA/D変換処理することができる。従って、コンピュータ4は、受信センサー25での受信信号や、姿勢計23から出力されるピッチ角α、ロール角β及び回転角γの信号についての全波形情報を用いて、解析処理を行うことができる。
【0041】
<地下構造の探査方法>
送信器11により電磁波が送信され地下内部の地殻によって誘導電磁場が発生するが、ヘリコプタ1より吊り下げられた空中曳航体7内の受信センサー25によって観測されるのは、X軸方向、Y軸方向及びZ軸方向の3つの磁場成分である。このうち、解析にはZ軸方向の磁場成分、つまり垂直磁場を利用し、図11に示すような地下構造を導く。図11は、地下構造が水平層構造である場合の地下断面図であるが、観測対象は水平層構造に限られない。図11において、ρ1,ρ2,ρ3はそれぞれA層,B層,C層の比抵抗であり、その単位は[Ωm]である。また、H1,H2,H3は、それぞれA層,B層,C層の厚さ(深さ)を示している。時刻tに観測される垂直磁場をHZ(t)とすると、一般に、垂直磁場HZ(t)は以下の式(1)で表される。
【0042】
【数1】
【0043】
ここで、x,y,zは受信センサー25の位置する座標を示し、f(a)はaについての関数であることを示す。
【0044】
従って、必要な個数のデータを収集して式(1)に代入し、それによって得られる連立方程式を数値的に解くことによって地下構造が明らかになる。
【0045】
実際に送信器11から送る信号を図12に示す。図12は、送信線10を介して電極8,9に流す電流波形と送信側水晶時計12のタイミングを示す図である。図のTは電流信号を示し、CLKはタイミング信号を示す。送信側水晶時計12からタイミング信号が入ると同時に、送信器11は電極8,9に大電流を流す。そして数秒間程度電流を流し、次に送信側水晶時計12からタイミング信号が入ると電流は流れなくなる。すなわち、図12に示すような矩形波電流を流すことにより、直線状に並んだ2本の送信線がダイポールアンテナとして機能し、電磁波を瞬間的に発生させたり、消滅させたりする。ここで、電流が流れない時間は、受信側の応答性を考慮して、数秒程度は必要である。このように地表に設置された機器では、図12のような矩形波的な操作(ON/OFF動作)を繰り返して行う。また、1パルスごとに極性を反転させて、電流を流してもよい。
【0046】
そして、地下内部の地殻によって誘導電磁場が発生し、先述のように、このうち垂直磁場をヘリコプタ1に吊り下げられた空中曳航体7内の受信センサー25によって観測する。
【0047】
図13は、受信センサー25での受信信号と受信側水晶時計5のタイミングを示す図である。図に示す、Rは受信センサー25で受信した受信信号の増幅器2での増幅後の信号であり、CLKは受信側水晶時計5のタイミング信号である。なお、図12のCLKのタイミングと、図13のCLKのタイミングは同一時間である。
【0048】
増幅器2から出力される受信信号Rには、受信センサー25の揺れによってノイズ信号が含まれる。つまり、受信センサー25が地球磁場の中で動くと、当該受信センサー25はその揺れを磁場変動として捕らえて、その変動磁場がノイズ信号として受信信号Rに現れる。以後、このノイズ信号を「揺れノイズ信号」と呼ぶ。従って、受信信号Rに対してそのまま後の処理を行っても正確な地下構造は把握できない。そのため、空中曳航体7に搭載された姿勢計23での計測結果データをコンピュータ4に読み込み、コンピュータ4は、図13に示す受信信号Rのデジタル化された信号と、姿勢計23から得られたデータから、受信した垂直磁場信号の補正を行う。この結果得られる情報は、図14のようになる。図14は、時間と補正後の垂直磁場との関係を示す図である。図14の関係で、地下構造の解析に重要な部分が図のBの過渡応答を示す部分である。地下構造が異なれば、この過渡応答を示す波形も異なる。しかし、その他の定常状態においては、地下構造にかかわらず、同一であるので地下構造の解析には重要でない。従って、図14のように補正を行った後、Bの部分のように過渡応答を示している部分のみを解析対象とする。
【0049】
図14のBの部分について、初期時刻t=0とし、Δtごとにサンプリングすると、上記式(1)より、以下の式(2)〜(4)が得られる。
【0050】
【数2】
【0051】
ここで座標(x0,y0,z0),(x1,y1,z1),(x2,y2,z2)はヘリコプタ1に搭載されたGPS受信機21及び高度計22などから求められるため、式(2)から式(4)の数式からなる連立方程式を数値的に解くことによって、探査情報を取得することができる。すなわち、図11に示す各層の比抵抗及び各層の厚さが得られる。なお、サンプリング数は上記の場合は3個であるが、これは説明を簡便にするためであり、実際の解析の場合は、必要数のサンプリングを行い、式(1)に代入すればよい。
【0052】
<座標値算出の方法>
上記の処理において、GPS受信機21よび高度計22を使用した座標値xi,yi,zi(i=0,1,…)の算出の方法の例について説明する。
【0053】
座標算出においては、地表の所定位置を原点とし、高さ方向に座標軸Zをとる。水平方向の座標軸は、例えば電極8,9を相互に結ぶ線分の方向をY軸とし、水平面内でそれに垂直な方向をX軸とすることができる。この送信側の座標値(xT,yT,zT)は例えば電極8,9の中間点の座標値であり、これは予め地表で観測するか、あるいは地形図から知ることができる。
【0054】
そして、ヘリコプタ1のGPS受信機21で観測した緯度・経度をXY方向に換算して、時刻(i・Δt)におけるヘリコプタ1の現在の座標値xHi,yHiを求め、高度計22の出力から座標値zHiを求める。
【0055】
これらの座標値がこのようにして求められた後は、それらの差の演算:
【0056】
【数3】
【0057】
によって、式(2)から式(4)の座標値(xi,yi,zi)を、(i・Δt)のそれぞれの時刻について知ることができる。
【0058】
<受信信号の補正方法>
上述の特許文献1では、揺れノイズ信号を除去するために、傾斜計で得られた受信センサーの傾斜情報に基づいて受信信号の補正を行っている。例えば、傾斜計が検出する受信センサーの傾斜が水平面からの傾きθで表される場合、受信した垂直磁場信号をcosθで除算することによって補正している。しかしながら、この方法では、傾斜計での測定ノイズを除去するために補正後の垂直磁場信号に対してフィルタリング処理を実行しようとすると、当該垂直磁場信号に含まれる、探査情報を含む信号の波形を歪めてしまい、探査精度が劣化する可能性がある。
【0059】
そこで、本発明では、受信信号に含まれる揺れノイズ信号を予測して、その予測値を受信信号から差し引くことによって受信信号に対する補正を行う。これにより、予測値に対してのみ、測定ノイズ除去などの必要な処理を実行できるため、受信信号に含まれる探査情報を含む信号の波形を歪めることなく、揺れノイズ信号を確実に除去できる。以下に本発明に係る補正方法について詳細に説明する。
【0060】
図15は受信信号の補正方法を示すフローチャートである。図15に示されるように、ステップs1では、コンピュータ4が、姿勢計23から出力されるピッチ角α、ロール角β及び回転角γを取得して記憶する。そして、ステップs2において、コンピュータ4は、取得したピッチ角α、ロール角β及び回転角γに基づいて、受信信号に含まれる揺れノイズ信号の予測値を求める。
【0061】
次に、ステップs3において、コンピュータ4は、揺れノイズ信号の予測値の周波数特性を、受信センサー25での周波数特性に補正し、ステップs4において、補正後の予測値を受信信号から差し引く。そして、コンピュータ4は、上記式(1)を使用して、補正後の予測値が差し引かれた受信信号のうちの垂直磁場成分に基づいて、比抵抗等の探査情報を取得する。
【0062】
通常、姿勢計23の周波数特性と受信センサー25の周波数特性とは異なるため、姿勢計23での計測結果から求めた揺れノイズ信号の予測値をそのまま受信信号から差し引いても、受信信号に含まれる揺れノイズ信号を十分に除去できない可能性がある。そこで、ステップs3のように、ステップs2で求めた予測値を受信センサー25での周波数特性に補正し、ステップs4において、補正後の予測値を受信信号から差し引くことによって、受信信号Rに含まれる揺れノイズ信号を確実に除去することができる。
【0063】
以上のように、コンピュータ4は、受信信号に含まれる揺れノイズ信号の予測値を求める揺れノイズ予測部として機能するとともに、当該予測値の周波数特性を補正する周波数特性補正部として機能する。そして、コンピュータ4は、補正後の予測値が差し引かれた受信信号に基づいて探査情報を取得する探査情報取得部としても機能する。
【0064】
なお、上述のステップs1〜s4までの処理で取り扱われる各データは、A/D変換装置3でA/D変換処理された後のデジタルデータである。
【0065】
<揺れノイズ信号の予測値の算出方法>
次に、上記ステップs2における揺れノイズ信号の予測値の算出方法について詳細に説明する。図16は、揺れノイズ信号の予測値の算出方法を説明するための図である。図16において、座標軸Xo,Yo,Zoで表される直交座標系は基準となる固定座標系(以後、「基準座標系」と呼ぶ)であり、座標軸Xt,Yt,Ztで表される直交座標系は、時刻tにおける受信センサー25での受信磁場の各成分を表す座標系(以後、「受信センサー座標系」と呼ぶ)である。
【0066】
揺れノイズ信号は、受信センサー座標系が、受信センサー25の揺れによって基準座標系から変動することによって生じると考えることができる。従って、基準座標系での地球磁場Heの値を、受信センサー座標系での値に座標変換することによって、揺れノイズ信号を予測することができる。
【0067】
受信センサー25での受信信号に含まれるであろう地球磁場Heの信号、つまり揺れノイズ信号のXt軸成分、Yt軸成分及びZt軸成分の時刻tにおける値を、それぞれhaxn(t),hayn(t),hazn(t)とし、時刻tにおいて姿勢計23から出力されるピッチ角α、ロール角β及び回転角γをそれぞれα(t)、β(t)及びγ(t)とし、基準座標系での地球磁場HeのXo軸成分、Yo軸成分及びZo軸成分をそれぞれhxm(t0)、hym(t0)及びhzm(t0)とすると、haxn(t)、hayn(t)及びhazn(t)は、座標変換の式を用いて以下の式(5)〜(7)で表される。
【0068】
【数4】
【0069】
ここで、fx(a)、fy(a)及びfz(a)のそれぞれは、aについての関数であることを示す。また、図16に示されるように、ピッチ角α(t)は、XoYo平面からのXt軸の傾斜角であって、ロール角β(t)は、XoYo平面からのYt軸の傾斜角である。そして、回転角γ(t)は、Xt軸をXoYo平面に投影して得られる軸と、Xo軸とが成す角度である。
【0070】
本実施の形態では、hxm(t0)、hym(t0)及びhzm(t0)の値として、方位計24内の3つのMIセンサーで得られる地球磁場HeのXYZ成分の値をそれぞれ使用する。
【0071】
コンピュータ4は、空中曳航体7が探査領域の上空に到達し、送信器11から図17に示されるような送信信号が出力されると、パルス信号が出力されている期間S1と、出力されていない期間S2とを測定サイクルCYCとして、当該測定サイクルCYC中に姿勢計23から出力されるピッチ角α(t)、ロール角β(t)及び回転角γ(t)を取得して記憶する。同時に、コンピュータ4は、測定サイクルCYC中のパルス信号が出力されていない期間S2において、方位計24から出力される地球磁場Heの各成分の値を取得して記憶する。
【0072】
次に、コンピュータ4は、方位計24からの地球磁場Heの各成分の値をhxm(t0)、hym(t0)及びhzm(t0)として式(5)〜(7)に代入する。そして、コンピュータ4は、取得したピッチ角α(t)、ロール角β(t)及び回転角γ(t)を式(5)〜(7)に代入して、haxn(t)、hayn(t)及びhazn(t)を求める。これにより、測定サイクルCYC中の各時刻における揺れノイズ信号の予測値のXYZ成分が求まる。コンピュータ4は、この動作を測定サイクルCYCごとに繰り返して実行する。従って、hxm(t0)、hym(t0)及びhzm(t0)は、測定サイクルCYCごとに更新されることになる。
【0073】
<揺れノイズ信号の予測値の周波数特性補正方法>
次に、図15のステップs3における周波数特性補正方法について説明する。コンピュータ4は、空中曳航体7が探査領域の上空に到達すると、地下探査を開始する前に、式(5)〜(7)を用いて、送信器11からパルス信号が出力されていない状態でのhaxn(t)、hayn(t)及びhazn(t)を求める。同時に、この状態において、受信センサー25での受信信号を取得する。このときの受信信号のXYZ成分を、それぞれhrx(t)、hry(t)及びhrz(t)とする。
【0074】
次にコンピュータ4は、haxn(t)とhrx(t)との関係を示す伝達関数Hcx(ω)と、hayn(t)とhry(t)との関係を示す伝達関数Hcy(ω)と、hazn(t)とhrz(t)との関係を示す伝達関数Hcz(ω)とを求める。まず、コンピュータ4は、haxn(t)、hayn(t)及びhazn(t)に対してFFT(高速フーリエ変換処理)を実行して、それらを時間領域の信号から周波数領域の信号Haxn(ω)、Hayn(ω)及びHazn(ω)にそれぞれ変換する。また、コンピュータ4は、hrx(t)、hry(t)及びhrz(t)に対してもFFTを実行して、それらを周波数領域の信号Hrx(ω)、Hry(ω)及びHrz(ω)にそれぞれ変換する。そして、コンピュータ4は、Hrx(ω)をHaxn(ω)で除算した値をHcx(ω)とし、Hry(ω)をHayn(ω)で除算した値をHcy(ω)とし、Hrz(ω)をHazn(t)で除算した値をHcz(ω)とする。
【0075】
hrx(t)、hry(t)及びhrz(t)は、送信器11からパルス信号が送信されていない状態での受信信号であるため、これらの信号には、探査情報を含む誘導電磁場は含まれていない。従って、これらの信号には揺れノイズ信号しか含まれていないことになる。従って、Hcx(ω)、Hcy(ω)及びHcz(ω)は、姿勢計23での計測結果に基づいて算出された揺れノイズ信号の予測値と、受信センサー25で実測された揺れノイズ信号との関係を示す伝達関数である。
【0076】
コンピュータ4は、送信器11から図17に示されるような送信信号が出力されて地下探査が開始すると、上述のステップs2を実行して、haxn(t)、hayn(t)及びhazn(t)を求める。そして、求めたhaxn(t)、hayn(t)及びhazn(t)に対してFFTを実行して、Haxn(ω)、Hayn(ω)及びHazn(ω)を取得する。
【0077】
次にコンピュータ4は、取得したHaxn(ω)、Hayn(ω)及びHazn(ω)と、予め求めておいた伝達関数Hcx(ω)、Hcy(ω)及びHcz(ω)とを以下の式(8)〜(10)に代入して、Hbx(ω)、Hby(ω)及びHbz(ω)を求める。
【0078】
【数5】
【0079】
そして、コンピュータ4は、求めたHbx(ω)、Hby(ω)及びHbz(ω)に対して逆FFTを実行して、それらを時間領域の信号hbxn(t)、hbyn(t)及びhbzn(t)にそれぞれ変換する。このとき、Hbx(ω)、Hby(ω)及びHbz(ω)から、姿勢計23での測定ノイズと考えられる30Hz以上の高周波成分を除去して逆FFTを実行する。
【0080】
このようにして、揺れノイズ信号の予測値であるhaxn(t)、hayn(t)及びhazn(t)の周波数特性は、受信センサー25での周波数特性に補正され、補正後のそれらの信号はそれぞれhbxn(t)、hbyn(t)及びhbzn(t)となる。
【0081】
地下探査を実行している状態での受信センサー25での受信信号のXYZ成分をそれぞれhx(t)、hy(t)及びhz(t)とすると、コンピュータ4は、受信センサー25から取得したhx(t)、hy(t)及びhz(t)と、hbxn(t)、hbyn(t)及びhbzn(t)とを以下の式(11)〜(13)に代入して、hxs(t),hys(t)及びhzs(t)を求める。
【0082】
【数6】
【0083】
そして、そのうちのhzs(t)を上記式(1)中のHZ(t)として使用することによって、揺れノイズ信号が除去された垂直磁場信号に基づいて探査情報を取得することができる。
【0084】
<変形例>
これまでは、飛行物体がヘリコプタの場合について説明したが、これに限らず、先述の受信に必要な機器を搭載して飛行することが可能なその他の飛行物体でもよい。好ましくは、低速飛行や空中停止が可能なヘリコプタや飛行船が使用される。また、無人機も使用可能である。
【0085】
また、地下構造の解析の際には、上記のように式(5)〜(7)の連立方程式を解く方法の他に、フーリエ変換を利用して、受信信号Rに含まれる周波数成分を導き、それによって、地下構造を得る方法を採用してもよい。
【0086】
また、受信センサー25の高度値は、ヘリコプタ1自身に搭載されている飛行用の高度計の読みを利用して求めてもよい。地殻調査においては、ヘリコプタ1本体と受信センサー25とのわずかな高度差は調査結果に対する影響が少ないためである。
【0087】
さらに、観測を行う水平位置及び高度を予め設定しておく場合には、そのような位置や高度になった時に受信センサー25の出力を取り込むようにしておくこともできる。
【0088】
また、揺れノイズ信号の予測値の周波数特性については、伝達関数を使用して周波数領域で補正処理を行っていたが、適応フィルタを使用して時間領域で補正処理を行うことも可能である。以下にこの変形例について説明する。
【0089】
適応フィルタをトランスバーサルフィルタで構成した場合には、フィルタの次数をN、Ai,j(i=0,1,2,・・・,N)を入力信号のサンプル時点jT(T:サンプリング周期)におけるフィルタ係数とすると、フィルタの入力信号Xjと出力信号Yjとの関係は、一般的に以下の式(14)で表される。
【0090】
【数7】
【0091】
本実施の形態の変形例に係るコンピュータ4は、式(14)を用いて揺れノイズ信号の予測値の周波数特性を受信センサー25での周波数特性に補正する。
【0092】
コンピュータ4は、空中曳航体7が探査領域の上空に到達し、送信器11から上述の図17に示されるような送信信号が出力されると、測定サイクルCYC中に姿勢計23から出力されるピッチ角α(t)、ロール角β(t)及び回転角γ(t)を取得して記憶するとともに、測定サイクルCYC中での受信センサー25での受信信号を取得して記憶する。同時にコンピュータ4は、測定サイクルCYC中のパルス信号が出力されていない期間S2において、方位計24から出力される地球磁場Heの各成分の値を取得して記憶する。
【0093】
次に、コンピュータ4は、取得した方位計24からの地球磁場Heの各成分の値をhxm(t0)、hym(t0)及びhzm(t0)として式(5)〜(7)に代入するとともに、取得したピッチ角α(t)、ロール角β(t)及び回転角γ(t)を式(5)〜(7)に代入して、測定サイクルCYC中のhaxn(t)、hayn(t)及びhazn(t)を求める。
【0094】
次に、コンピュータ4は、パルス信号が出力されていない期間S2におけるhaxn(t)、hayn(t)及びhazn(t)と、当該期間S2における受信信号を使用してフィルタ係数Ai,jを決定する。まずコンピュータ4は、求めた期間S2におけるhaxn(t)を入力信号Xjとして式(14)に代入するとともに、取得した期間S2における受信信号のX成分を出力信号Yjとして式(14)に代入する。そして、得られた各時刻での入力信号Xjと出力信号Yjとの関係式からX成分についてのフィルタ係数Ai,jを決定する。フィルタ係数Ai,jは、例えば最小二乗法を用いて決定することができる。同様に、Y成分のフィルタ係数Ai,jは、期間S2におけるhayn(t)と、期間S2における受信信号のY成分とを式(14)に代入して得られる式から決定することができ、Z成分のフィルタ係数Ai,jは、期間S2におけるhazn(t)と、期間S2における受信信号のZ成分とを式(14)に代入して得られる式から決定することができる。
【0095】
次に、コンピュータ4は、求めたX成分のフィルタ係数Ai,jを式(14)に代入するとともに、測定サイクルCYC中のhaxn(t)を入力信号Xjとして式(14)に代入し、測定サイクルCYC中の各時刻におけるX成分の出力信号Yjを求める。このようにして、揺れノイズ信号の予測値であるhaxn(t)の周波数特性が受信センサー25での周波数特性に補正される。
【0096】
同様にして、求めたY成分のフィルタ係数Ai,jを式(14)に代入するとともに、測定サイクルCYC中のhayn(t)を入力信号Xjとして式(14)に代入し、測定サイクルCYC中の各時刻におけるY成分の出力信号Yjを求める。また、求めたZ成分のフィルタ係数Ai,jを式(14)に代入するとともに、測定サイクルCYC中のhazn(t)を入力信号Xjとして式(14)に代入し、測定サイクルCYC中の各時刻におけるZ成分の出力信号Yjを求める。そして、コンピュータ4は、求めた出力信号YjのうちZ成分の出力信号Yjを式(1)中のHZ(t)として使用する。
【0097】
コンピュータ4は、以上の動作を測定サイクルごとに実行し、揺れノイズ信号の予測値の周波数特性に対する補正処理を、適応フィルタを使用して時間領域で実行する。
【0098】
以上のように、本実施の形態に係る探査システムでは、空中曳航体7の本体部71が曳航方向200とは反対方向に向かって細くなる水滴型であるため、ヘリコプタ1が移動している際に当該本体部71の後方には空気の渦が発生し難くなる。従って、空中曳航体7の揺れを抑制できる。
【0099】
更に、筒状の安定翼90は曳航方向200とは反対方向に向かって細くなっているため、ヘリコプタ1が移動している際に筒状の安定翼90内を通過する風は尾部71bに衝突しながら後方に流れ易くなる。そのため、尾部71bには曳航方向200とは逆向きの力が発生しやすくなり、尾部71bが後方に引っ張れるようになる。従って、空中曳航体7が曳航方向200に向きやすくなり、空中曳航体7の揺れを更に抑制できる。その結果、受信センサー25の揺れによって受信信号内に発生するノイズ信号を確実に低減でき、高精度な探査が可能となり、探査深度が向上する。
【0100】
また、空中曳航体7の本体部71では、曳航方向200に垂直な方向に沿った断面形状が紡錘形であるため、空中曳航体7の揺れを更に低減できる。その結果、更に高精度な探査が可能となり、探査深度が向上する。
【0101】
また、本実施の形態では、センサー台100にジンバル構造が採用されているため、受信センサー25の揺れが更に低減し、探査精度が更に向上する。
【0102】
また、誘導電磁場等の微弱な信号を受信する際には受信センサー25は姿勢計23よりも通常重くなるため、本実施の形態のように、その重い受信センサー25をジンバル構造の下面に設けることによって、ジンバル構造の不要な揺れを低減でき、探査精度が更に向上する。
【0103】
また、本実施の形態では、揺れノイズ信号の予測値を取得しているため、当該予測値だけに測定ノイズ除去などの必要な処理が実行できる。従って、受信信号に含まれる揺れノイズ信号を確実に除去することができ、探査精度が向上する。
【0104】
また、揺れのノイズ信号の予測値の周波数特性を、受信センサー25での周波数特性に補正しているため、受信信号に含まれる揺れノイズ信号を確実に除去することができる。
【図面の簡単な説明】
【0105】
【図1】本発明の実施の形態に係る探査システムの構成を示す図である。
【図2】本発明の実施の形態に係る空中曳航体の本体部の構造を示す側面図である。
【図3】本発明の実施の形態に係る空中曳航体の本体部の構造を示す断面図である。
【図4】本発明の実施の形態に係る空中曳航体の本体部の構造を示す平面図である。
【図5】本発明の実施の形態に係る空中曳航体の安定翼の構造を示す斜視図である。
【図6】本発明の実施の形態に係る空中曳航体の曳航状態を示す側面図である。
【図7】本発明の実施の形態に係るセンサー台の構造を示す斜視図である。
【図8】本発明の実施の形態に係るセンサー台に取り付けられるセンサーの構成を示す側面図である。
【図9】本発明の実施の形態に係る飛行物体に搭載される機器の構成を示す図である。
【図10】本発明の実施の形態に係る探査システムにおいて地表に設置する機器の構成を示す図である。
【図11】地下構造が水平層構造である場合の地下断面図である。
【図12】送信線を介して電極に流す電流波形と送信側水晶時計のタイミングを示す図である。
【図13】増幅器で得られる受信信号と受信側水晶時計のタイミングを示す図である。
【図14】時間と、地殻によって発生する誘導電磁場の垂直磁場との関係を示す図である。
【図15】本発明の実施の形態に係る探査システムの動作を示すフローチャートである。
【図16】本発明の実施の形態に係る探査システムの動作を説明するための図である。
【図17】送信線を介して電極に流す電流波形を示す図である。
【符号の説明】
【0106】
1 ヘリコプタ、4 コンピュータ、7 空中曳航体、23 姿勢計、25 受信センサー、71 本体部、71a 頭部、71b 尾部、90 安定翼、100 センサー台、200 曳航方向。
【特許請求の範囲】
【請求項1】
飛行物体と、
探査対象に関する情報を含む信号を受信する受信センサーを有し、前記飛行物体に空中で曳航される空中曳航体と
を備える探査システムであって、
前記空中曳航体は、
曳航方向とは反対方向に向かって細くなる水滴型の本体部と、
前記本体部の尾部を取り囲み、前記曳航方向とは反対方向に向かって細くなる筒状の安定翼と
を備える、探査システム。
【請求項2】
請求項1に記載の探査システムであって、
前記空中曳航体の前記本体部では、前記曳航方向に垂直な方向に沿った断面形状が紡錘形である、探査システム。
【請求項3】
請求項1及び請求項2のいずれか一つに記載の探査システムであって、
前記空中曳航体における前記本体部の頭部内には、
前記受信センサーが搭載され、その揺れを抑制するジンバル構造を有するセンサー台が設けられている、探査システム。
【請求項4】
請求項3に記載の探査システムであって、
前記頭部内には、前記受信センサーの姿勢を検出する姿勢計が設けられており、
前記姿勢計は、前記ジンバル構造の上面に取り付けられており、
前記受信センサーは、前記ジンバル構造の下面に取り付けられている、探査システム。
【請求項5】
請求項1乃至請求項3のいずれか一つに記載の探査システムであって、
前記空中曳航体における前記本体部の頭部内には、前記受信センサーの姿勢を計測する姿勢計が設けられており、
前記受信センサーの揺れによって前記受信センサーでの受信信号に含まれるノイズ信号の予測値を、前記姿勢計での計測結果に基づいて求める揺れノイズ予測部と、
前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する探査情報取得部と
を更に備える、探査システム。
【請求項6】
請求項5に記載の探査システムであって、
前記予測値の周波数特性を前記受信センサーでの周波数特性に補正する、周波数特性補正部を更に備え、
前記探査情報取得部は、前記周波数特性補正部で補正された前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する、探査システム。
【請求項7】
請求項6に記載の探査システムであって、
前記周波数特性補正部は、前記予測値と、前記受信センサーで測定された前記ノイズ信号との関係を示す伝達関数に基づいて、前記予測値を前記受信センサーでの周波数特性に補正する、探査システム。
【請求項8】
請求項6に記載の探査システムであって、
前記周波数特性補正部は、適応フィルタを用いて前記予測値を前記受信センサーでの周波数特性に補正する、探査システム。
【請求項1】
飛行物体と、
探査対象に関する情報を含む信号を受信する受信センサーを有し、前記飛行物体に空中で曳航される空中曳航体と
を備える探査システムであって、
前記空中曳航体は、
曳航方向とは反対方向に向かって細くなる水滴型の本体部と、
前記本体部の尾部を取り囲み、前記曳航方向とは反対方向に向かって細くなる筒状の安定翼と
を備える、探査システム。
【請求項2】
請求項1に記載の探査システムであって、
前記空中曳航体の前記本体部では、前記曳航方向に垂直な方向に沿った断面形状が紡錘形である、探査システム。
【請求項3】
請求項1及び請求項2のいずれか一つに記載の探査システムであって、
前記空中曳航体における前記本体部の頭部内には、
前記受信センサーが搭載され、その揺れを抑制するジンバル構造を有するセンサー台が設けられている、探査システム。
【請求項4】
請求項3に記載の探査システムであって、
前記頭部内には、前記受信センサーの姿勢を検出する姿勢計が設けられており、
前記姿勢計は、前記ジンバル構造の上面に取り付けられており、
前記受信センサーは、前記ジンバル構造の下面に取り付けられている、探査システム。
【請求項5】
請求項1乃至請求項3のいずれか一つに記載の探査システムであって、
前記空中曳航体における前記本体部の頭部内には、前記受信センサーの姿勢を計測する姿勢計が設けられており、
前記受信センサーの揺れによって前記受信センサーでの受信信号に含まれるノイズ信号の予測値を、前記姿勢計での計測結果に基づいて求める揺れノイズ予測部と、
前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する探査情報取得部と
を更に備える、探査システム。
【請求項6】
請求項5に記載の探査システムであって、
前記予測値の周波数特性を前記受信センサーでの周波数特性に補正する、周波数特性補正部を更に備え、
前記探査情報取得部は、前記周波数特性補正部で補正された前記予測値を前記受信信号から差し引いて得られる信号に基づいて、前記探査対象に関する情報を取得する、探査システム。
【請求項7】
請求項6に記載の探査システムであって、
前記周波数特性補正部は、前記予測値と、前記受信センサーで測定された前記ノイズ信号との関係を示す伝達関数に基づいて、前記予測値を前記受信センサーでの周波数特性に補正する、探査システム。
【請求項8】
請求項6に記載の探査システムであって、
前記周波数特性補正部は、適応フィルタを用いて前記予測値を前記受信センサーでの周波数特性に補正する、探査システム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図12】

【図13】
【図14】
【図15】

【図16】

【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2006−105907(P2006−105907A)
【公開日】平成18年4月20日(2006.4.20)
【国際特許分類】
【出願番号】特願2004−296298(P2004−296298)
【出願日】平成16年10月8日(2004.10.8)
【出願人】(000173809)財団法人電力中央研究所 (1,040)
【出願人】(000121844)応用地質株式会社 (36)
【公開日】平成18年4月20日(2006.4.20)
【国際特許分類】
【出願日】平成16年10月8日(2004.10.8)
【出願人】(000173809)財団法人電力中央研究所 (1,040)
【出願人】(000121844)応用地質株式会社 (36)
[ Back to top ]