
探知測距装置および探知測距方法
【課題】複数の送信素子および複数の受信素子を有する探知測距装置の処理時間の短縮と回路の簡略化とを図る。
【解決手段】探知測距装置は、互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、M個のプローブ信号を送信するM個の送信素子と、ターゲットからのエコー信号を受信するN個の受信素子と、N個の受信素子のそれぞれに対して設けられ、M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、復調エコー信号を周波数領域でフィルタリングしてM個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、を有する。
【解決手段】探知測距装置は、互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、M個のプローブ信号を送信するM個の送信素子と、ターゲットからのエコー信号を受信するN個の受信素子と、N個の受信素子のそれぞれに対して設けられ、M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、復調エコー信号を周波数領域でフィルタリングしてM個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ターゲットを探知する探知測距装置および探知測距方法に係わる。
【背景技術】
【0002】
従来より、電波(例えば、ミリ波)を利用して、ターゲットを探知する探知測距装置が実用化されている。探知測距装置は、探知領域にプローブ信号を放射し、ターゲットからの反射信号(すなわち、エコー信号)を受信する。そして、探知測距装置は、受信したエコー信号を解析することにより、ターゲットまでの視線方向相対距離(以下、単に距離と記す)、ターゲットの視線方向相対速度(以下、単に速度と記す)、ターゲットが存在する方向(角度)を推定する。このような探知測距装置は、例えば、等間隔で配置された複数の受信センサ素子を有し、各受信センサ素子により受信されるエコー信号の位相などに基づいて、ターゲットを探知する、各々の諸元(距離、速度、角度等)を推定する。
【0003】
上述の探知測距装置においては、受信センサ素子の個数を増やして受信センサアレーの開口を拡大すると、探知可能なターゲットの個数が増加し、更に角度推定の性能等も高くなる。この一方で、特に、自動車などに搭載する探知測距装置では、装置の小型/低コスト化が要求される。
【0004】
装置の小型化という観点からは、複数の送信センサ素子と複数の受信センサ素子とを有する構成を採用し、それらのセンサを時間分割方式で適切に切り替えることによって、受信センサアレーの実効開口を広くする技術が提案されている。しかしこの技術では、個々の送信センサ素子が占有するタイムスロット毎に、受信センサアレーを用いてエコー信号ベクトルを取得し、各々のタイムスロットで取得した信号ベクトルの位相を合せる必要があるので、ターゲットを探知するために要する時間が長くなってしまう。
【0005】
この問題を解決するために以下の探知測距方法が提案されている。即ち、複数の変調器において互いに直交する符号を用いて拡散されたプローブ信号を、複数の送信センサ素子から同時(少なくとも、装置の動作周期を単位時間として同時性を定義する。但し、複数の単位時間をまとめて新たに単位時間として考えても良い − 以下、同様)に放射する。そして、複数の受信用センサで受信された信号のそれぞれを、複数の分岐器で分岐し、そのそれぞれについて復調器において送信側で用いた符号と同じ符号により逆拡散する。(例えば、特許文献1)
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−80024号公報
【特許文献2】特開2010−243237号公報
【特許文献3】特開2010−145289号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
送信波を符号で拡散する方式を採用した探知測距装置は、ターゲットの探知時間を短縮するという観点からは好適な構造であるが、拡散符号の同期補足のための回路などを必要とするので、回路規模が大きくなり、従って、製造コストが上昇してしまう。
【0008】
本発明の課題は、複数の送信センサ素子および複数の受信センサ素子を有する探知測距装置の回路の簡略化を図ることである。
【課題を解決するための手段】
【0009】
本発明の1つの態様の探知測距装置は、互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、前記M個のプローブ信号を送信するM個の送信素子と、ターゲットからのエコー信号を受信するN個の受信素子と、前記N個の受信素子のそれぞれに対して設けられ、前記M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、前記N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、を有する。
【発明の効果】
【0010】
上述の態様によれば、複数の送信センサ素子および複数の受信センサ素子を有する探知測距装置の回路が簡略化される。
【図面の簡単な説明】
【0011】
【図1】第1の実施形態に係る探知測距装置の構成を示す図である。
【図2】変調入力信号の一例を示す図である。
【図3】第1の実施形態の復調回路の動作を説明する図である。
【図4】エコー信号の空間位相について説明する図である。
【図5】第2の実施形態に係る探知測距装置の構成を示す図である。
【図6】第2の実施形態の復調回路の動作を説明する図である。
【図7】第3の実施形態に係る探知測距装置の構成を示す図である。
【図8】第3の実施形態の動作例を示す図である。
【図9】第4の実施形態に係る探知測距装置の構成を示す図である。
【図10】第5の実施形態でプローブ信号を生成する方法を説明する図である。
【図11】第6の実施形態の動作例を示す図である。
【図12】角度推定の信頼性を算出する処理を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明の実施形態の探知測距装置は、複数の送信素子(送信センサ素子)および複数の受信素子(受信センサ素子)を有する。各送信センサ素子は、それぞれ、探知領域にプローブ信号を放射する。ここで、探知領域内にターゲット(被探知物体)が存在すると、プローブ信号はそのターゲットにより反射される。各受信センサ素子は、ターゲットからの反射信号(すなわち、エコー信号)を受信する。そして、探知測距装置は、受信したエコー信号の位相などを解析することにより、探知測距装置からターゲットまでの距離、探知測距装置に対するターゲットの相対速度、ターゲットが存在する方向を推定する。
【0013】
なお、以下に示す実施形態においては、探知測距装置としてレーダーの場合を具体例として説明を行うので、各送信センサ素子は、それぞれ送信アンテナであり、各受信センサ素子は、それぞれ受信アンテナである。
【0014】
<第1の実施形態>
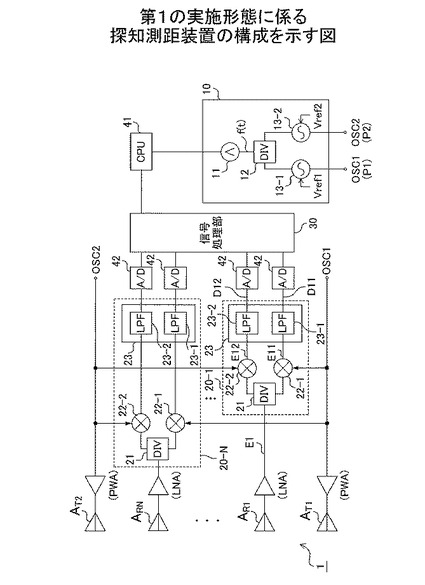
図1は、第1の実施形態に係る探知測距装置(探知測距装置1と呼ぶ)の構成を示す。探知測距装置1は信号生成回路10、送信アンテナ:AT1〜AT2(即ち、M=2)、受信アンテナ:AR1〜ARN、復調回路20−1〜20−N、信号処理部30、及びCPU41を有する。以降、装置の動作を簡潔に説明する為、CPU41は探知測距装置1の動作の制御を、信号処理部30は探知測距処理をそれぞれ分担するものとし、CPU41の動作については説明を省略する。
【0015】
信号生成回路10は、変調入力信号生成器(BB−OSC: base band oscillator)11、分岐器12、互いに異なる中心周波数(キャリア周波数)で発振する複数の高周波電圧制御発振器(RF−VCO:radio frequency voltage-controlled oscillator)13−1、13−2を有する。即ち、信号生成回路10は、BB−OSCからの入力信号で変調された、キャリア周波の異なる複数のプローブ信号を生成する。
【0016】
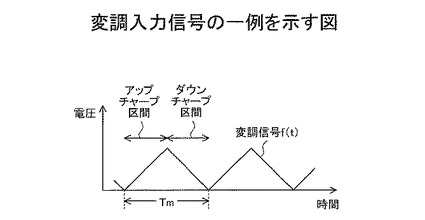
BB−OSC11は変調入力信号f(t)を生成する。本実施例では、f(t)として図2に示す周期的な電圧信号を仮定している(勿論、他の波形でも良い事はいうまでもない)。図示のf(t)は、周期:Tm毎に、時間に沿って電圧がリニアに上昇するアップチャープ区間、および時間に沿って電圧がリニアに下降していくダウンチャープ区間を有する。なお、f(t)の周期:Tmは、主に距離や速度の分解能によって、その具体的な値が決定されるが、例えば、数10m秒程度の値である。また、電圧の値域もモノポーラでなく、バイポーラでも良い。
【0017】
BB−OSC11で生成されたf(t)は、分岐器(DIV)12を介してRF−VCO13−1、13−2の発振周波数を制御する制御信号として使用される。即ち、RF−VCOは、上記制御信号を入力できる端子(制御信号入力端子)を少なくとも1つは備えている。
【0018】
RF−VCO13−1、13−2は制御端子に印加される電圧(または、電流)に対応する周波数で発振する。なお、この明細書においては、「周波数」および「角周波数」を区別することなく「周波数」と呼ぶ。すなわち、「周波数」は、角周波数を含むものとする。
【0019】
さて、RF−VCO13−1の制御端子には、キャリア周波数をωc1に設定するための基準電圧Vref1と変調入力信号f(t)とを重畳して印加する事によって、RF−VCOの瞬時周波数はωc1を中心にf(t)に沿って変化してゆく。この様にして構成された周波数変調発振器をOSC1と記し、その出力であるプローブ信号をP1と記す。
【0020】
同様に、RF−VCO13−2の制御端子には、キャリア周波数をωc2に設定するための基準電圧Vref2と変調入力信号f(t)とを重畳して印加する事によって、RF−VCOの瞬時周波数はωc2を中心にf(t)に沿って変化してゆく。上記同様に構成された周波数変調発振器をOSC2と記し、その出力であるプローブ信号をP2と記す。
【0021】
勿論、例えば、RF−VCO13−1、13−2の共振素子が互いに異なる周波数で共振する様な回路構成を採用する事により、基準電圧Vref1、Vref2をf(t)に重畳する事無く、各RF−VCOのキャリア周波数を変更する様にしても良い。また、基準電圧Vref1、Vref2の与え方として、RF−VCO13−1、RF−VCO13−2のバイアス点を操作する方法もあり得る。
【0022】
図1の実施例では、信号生成回路10により生成されたプローブ信号:P1、P2は、それぞれに対応するパワーアンプ(PWA)で増幅され、送信アンテナ:AT1、AT2から探知領域に向けて同時に放射される。
【0023】
各受信アンテナ:AR1〜ARNは、P1、P2がターゲットで反射される事によって生成されたエコー信号を同時に受信する。受信アンテナ:AR1〜ARNによって受信される信号をそれぞれエコー信号E1〜ENと呼ぶことにする。簡単の為、本実施例では、送信アンテナ:AT1、AT2、および受信アンテナ:AR1〜ARNは直線上に配置されているものとし、更に、AT1、AT2はAR1〜ARNの両端の外側に配置されており、また、AR1〜ARNは等間隔で配置されているものとする。
【0024】
さて、P1、P2は探知領域に向かって同時に放射されたから、エコー信号E1〜ENは、それぞれ、P1の反射波およびP2の反射波が重ね合わされた形で含まれている。また、エコー信号E1〜ENには少なくとも1つ以上のターゲットからの反射波が含まれているものとする。
【0025】
AR1〜ARNで受信されたエコー信号E1〜ENは、各アンテナに対応する低雑音アンプ(LNA)で増幅された後に、復調回路20−1〜20−Nに導かれる。
【0026】
復調回路20−1〜20−Nは、個々の受信アンテナ:AR1〜ARNに対応して設けられており、信号生成回路10で生成されたプローブ信号:P1、P2の中の少なくとも1つを用いて、対応するエコー信号E1〜ENからそれぞれ2組のデータ信号を生成する。
【0027】
復調回路20−1〜20−Nの構成および動作は、互いにほぼ同じである。すなわち、各復調回路20−1〜20−Nは、それぞれ、分岐器(DIV)21、ミキサ22−1、22−2、フィルタ回路23を有する。以下、復調回路20−1の場合を具体例として、AR1で受信されたエコー信号E1が復調される迄の一連の動作を説明する。
【0028】
分岐器21はE1を分岐し、実質的に同じエコー信号を、例えばアナログ乗算器で構成された、ミキサ22−1と22−2とに導く。
【0029】
ミキサ22−1では、E1と信号生成回路10から出力されるP1とを掛け合わせる。すると、ミキサ22−1からの出力はプローブ信号:P1によってダウンコンバートされたE1のベースバンド成分E11となる(以下、同様の操作を経て取得された信号を復調エコー信号と呼称する)。
【0030】
同様に、ミキサ22−2では、E1と信号生成回路10から出力されるP2とを掛け合わせる。すると、ミキサ22−2からの出力はプローブ信号:P2でダウンコンバートされたE1のベースバンド成分E12となる。
【0031】
フィルタ回路23は、ミキサ22−1、22−2の出力信号をそれぞれフィルタリングするローパスフィルタ(LPF)23−1、23−2を有する。LPF23−1は、ミキサ22−1から出力される復調エコー信号E11から対応する周波数成分を抽出することでデータ信号D11を生成する。同様に、LPF23−2は、ミキサ22−2から出力される復調エコー信号E12から対応する周波数成分を抽出することで、データ信号D12を生成する。なお、「Dnm」は、n番目の受信アンテナを介して受信したエコー信号から抽出される、m番目のプローブ信号の反射波成分を表す。
【0032】
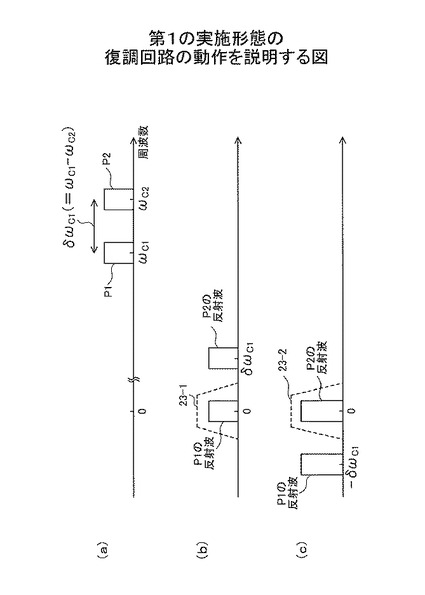
図3は、復調回路20−1の動作を説明する図である。この実施例では、探知測距装置1は、図3(a)に示すように、キャリア周波数ωc1のプローブ信号P1およびキャリア周波数ωc2のプローブ信号P2を送信する。以下の説明では、キャリア周波数ωc1とキャリア周波数ωc2との差分を「δω」と表記する。
【0033】
ここで、復調回路20−1には受信アンテナ:AR1を介してエコー信号E1が入力されるが、このE1には、プローブ信号:P1の反射波およびプローブ信号:P2の反射波が含まれている。よって、E1を周波数領域で表示すると、P1、P2に由来する反射波のスペクトラムは、周波数軸上で図3(a)の様な配置関係になる。
【0034】
図3(b)は、ミキサ22−1およびLPF23−1の動作を示す。ミキサ22−1は、上述したように、E1とキャリア周波数:ωc1なるP1とを掛け合わせる。E1にP1を掛け合わせるとE1はωc1だけダウンコンバートされる為、E1に含まれるP1の反射波成分は、ベースバンド領域に(前記E11として)現れる。一方、E1に含まれるP2の反射波成分は、ベースバンド領域からδωだけシフトした領域に現れる。
【0035】
LPF23−1のカットオフ周波数をP1の反射波成分を通過させ、P2の反射波成分を遮断するように設定する事で、LPF23−1はP2の反射波成分を遮断すると共に、P1の反射波成分を出力する。LPF23−1により抽出される周波数成分は、上述したデータ信号D11に相当する。
【0036】
図3(c)は、ミキサ22−2およびLPF23−2の動作を示す。ミキサ22−2は、上述したように、E1とキャリア周波数:ωc2なるP2とを掛け合わせる。E1にP2を掛け合わせるとE1はωc2だけダウンコンバートされる為、E1に含まれるP2の反射波成分は、ベースバンド領域に(前記E12として)現れる。一方、E1に含まれるP1の反射波成分は、ベースバンド領域からδωだけシフトした領域に現れる。
【0037】
LPF23−2のカットオフ周波数をP2の反射波成分を通過させ、P1の反射波成分を遮断するように設定する事で、LPF23−2はP1の反射波成分を遮断すると共に、P2の反射波成分を出力する。LPF23−2により抽出される周波数成分は、上述したデータ信号D12に相当する。
【0038】
尚、図3(b)および図3(c)のLPF出力の周波数軸に於ける位置関係は、P1、P2のキャリア周波数の大小関係で相対的な位置が定まる事はいうまでもない。
【0039】
このように、復調回路20−1のフィルタ回路23は、AR1を介して受信したE1からP1の反射波成分およびP2の反射波成分を互いに分離して出力する。つまり、復調回路20−1は、AR1を介して受信した1組のエコー信号:E1から2組のデータ信号D11、D12を生成する。
【0040】
復調回路20−1〜20−Nの動作は互いに同様だから、復調回路20−1〜20−Nにより、2N(M×N、本実施例ではM=2)組のデータ信号が生成される。すなわち、AR1〜ARNの受信信号に含まれるP1の反射波成分とAR1〜ARNの受信信号に含まれるP2の反射波成分とが同時に得られる。
【0041】
復調回路20−1〜20−Nから出力されるデータ信号は、それぞれ、A/Dコンバータ42によりデジタル信号に変換される。A/Dコンバータ42により得られるデジタル信号は、信号処理部30に与えられる。なお、実際に処理するデータ量は、基本周期をTmとし、時間軸方向へのサンプリング数をQとした場合、M×N×Q個となるが、ここでは表現を簡潔にする為、時間軸方向へのサンプリングについては明示しない。
【0042】
信号処理部30は、プロセッサおよび/またはデジタル演算のためのハードウェア回路を含む。そして、信号処理部30は、デジタル化された2N(一般にはM×N組であるが、本実施例ではM=2)組のデータ信号に基づいて、探知測距装置1からターゲットまでの距離、探知測距装置1に対するターゲットの速度、およびターゲットが存在する角度を推定する。
【0043】
信号処理部30では、少なくとも1以上のデータ信号を利用して、探知測距装置1からターゲットまでの距離およびターゲットの速度を推定する。この際、信号処理部30は、例えば、f(t)のアップチャープ区間およびダウンチャープ区間のそれぞれに於いて取得された時間領域のデータ信号にFFT演算等(変調入力信号が、例えば、鋸歯状波である場合のターゲット定位は、時間領域のデータ信号の自己相関から計算するので、必ずしもFFT演算を利用して周波数領域の信号に変換する必要は無い。装置の採用する変調方式に応じた回路形式の変形については、今後、深く立ち入らない)を施す事で周波数領域のデータ信号に変換する。
【0044】
そして、信号処理部30は、アップチャープ区間において得られるピーク周波数およびダウンチャープ区間において得られるピーク周波数に基づいて、探知測距装置1からターゲットまでの距離およびターゲットの速度を推定する。ピーク周波数からターゲットを定位する手法は教科書レベルの基礎事項であるから、本明細書での説明は割愛する。
【0045】
さらに、信号処理部30は、複数のデータ信号に既知の到来方向推定(ターゲット角度の推定、以下、到来方向推定とターゲットの角度推定なる文言とを特に区別しない)方法を利用してターゲットの方向を推定してもよい。
【0046】
到来方向推定方法としては、本発明を限定するものではないが、DBF(digital beam forming)法、MUSIC(multiple signal classification)アルゴリズム、PRISM(propagator method based on an improved spatial-smoothing matrix)アルゴリズム、ESPRIT(estimation of signal parameters via rotational invariance techniques)アルゴリズムなどが知られている。
【0047】
このように、第1の実施形態の探知測距装置では、各送信アンテナからキャリア周波数の異なるプローブ信号を同時に送信し、各受信アンテナを介してエコー信号を取得する。そして、周波数フィルタ(例えば、LPF)を用いて各エコー信号をフィルタリングすることにより、各エコー信号から各プローブ信号由来の反射波成分が抽出される。すなわち、M×N組の異なる反射波成分が得られる。したがって最も単純な場合、探知測距装置の備える受信アレーアンテナの物理開口が、実効的にM倍(参照文献にあるTSS型の開口合成同様、位相整合操作まで実現する機能を含めた構造まで敷衍して考えると、実効開口はM×N以下となる)になるので、探知性能または探知精度が向上する。勿論、Mは実際の送信アンテナの個数、Nは実際の受信アンテナの個数を表す。
【0048】
ここで、例えば、各送信アンテナから同じキャリア周波数のプローブ信号を送信する構成(比較例1)においては、各エコー信号に含まれる複数のプローブ信号の反射波成分を互いに分離することは困難である。したがって、比較例1においては、時間分割多重を採用し、各送信アンテナからプローブ信号を放射する時間区間として、少なくともTm以上の時間を割り当てる必要がある。この結果、ターゲットを探知するために要する時間が長くなる。
【0049】
これに対し、第1の実施形態の探知測距装置においては、各エコー信号に含まれる複数のプローブ信号の反射波成分は、周波数フィルタにより互いに分離される。即ち、1Tm時間の内に(勿論、同時送信/同時受信であるから、SNR向上等の他の目的で送信時間を延ばしても良い)、互いに分離された複数のプローブ信号の反射波成分を得ることができる。したがって、第1の実施形態の探知測距装置においては、比較例1と比較すると、ターゲットを探知するために要する時間が短くなる。
【0050】
比較例1の欠点を解決するために、各送信アンテナのプローブ信号を異なる符号で拡散する構成(比較例2)が提案されている。ところが、比較例2においては、受信アンテナ毎に各拡散符号の同期補足のための回路などを必要とする。このため、回路規模が大きくなり、現状、低コスト化という市場からの要求と相反する結果になってしまう。
【0051】
これに対し、第1の実施形態の探知測距装置においては、各エコー信号に含まれる複数のプローブ信号の反射波成分は、周波数フィルタという簡単な回路素子によって、複数のプローブ信号の反射波成分が互いに分離される。したがって、第1の実施形態の探知測距装置においては、比較例2と比較すると、探知測距装置の回路が簡略化される、低コストで装置が実現できる。
【0052】
次に、第1の実施形態の探知測距装置の動作を数学的に説明する。以下では、探知測距装置は、M個の送信アンテナおよびN個の受信アンテナを有するものとする。
【0053】
信号生成回路10は、互いに異なるキャリア周波数:ωcm(m=1〜M)を持つRF−VCOのそれぞれに、変調入力信号f(t)を入力することによって、プローブ信号を生成する。
【0054】
そして、探知測距装置は、上記複数のプローブ信号を探知範囲に向けて同時に送信する。このとき、送信アンテナm(m=1〜M)から送信されるプローブ信号vmTXは(1)式で表される。(1)式の上付き添え字は送信信号である事を表す。(2)式は変調入力信号を積分して得られるFMCW信号の位相項であり、vmTXの瞬時周波数はωcm+f(t)となる。なお、以下では、説明を簡単にするために、伝搬特性および装置の不完全性などの影響は無視するものとする。
【0055】
【数1】

【0056】
ここで、装置の探知範囲内にK個のターゲットが存在しているものとすると、受信アンテナn(n=1〜N)で受信した目標エコー信号vnRXは(3)式で表される。(3)式の上付き添え字RXは受信信号である事を示す。
【0057】
【数2】
【0058】
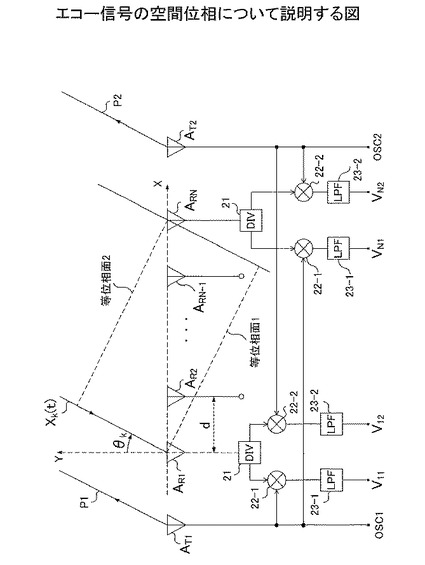
図4を参照しながら(3)〜(4)について説明する。図4の探知測距装置はM=2個の送信アンテナを有している。図4では、受信アンテナ:AR1の位置をX−Y座標の原点と定め、送信アンテナ:AT1、AT2および受信アンテナ:AR1〜ARNはX軸上に配置されているものとする。更に、隣接する個々の受信アンテナ:AR1〜ARNは互いに等しい間隔:dでX軸の正方向に向かって配置されており、また、Y軸を角度の0度として時計方向を角度の正方向とする。
【0059】
ターゲットk(k=1〜K)は、距離:dk、角度:θkの位置を、速度:vkで運動しているものとする。
【0060】
探知測距装置から放射されたプローブ信号がターゲットkで反射され、同装置に戻ってくるまでに要する時間(遅延時間τk)は2dk/c0で表され、ターゲットの速度に起因するドップラー周波数ωdm,kは2ωcmvk/c0で表される。なお、c0は光速度である。
【0061】
ターゲットkからのエコー信号は、AR1〜ARNが構成する受信アレーアンテナに対し、角度:θk方向からの平面波として到来するので、受信アンテナ:AR1を基準とした場合、ターゲットkからAR1までの伝播距離とn番目の受信アンテナまでの伝搬距離との差分はd(n-1)sinθkである。換言すれば、AR1を空間位相の0基準(ゼロ)とすれば、n番目の受信アンテナによって得られるエコー信号のm番目のキャリアに対する空間位相φnm,kは、(4)式で定義される。なお、λmは、m番目のキャリアの波長である。
【0062】
AR1〜ARNに続く各復調回路20−1〜20−Nでは、l(小文字のエル)番目のTX信号(プローブ信号)を利用して、受信エコー信号を復調する。なお、TX信号は(1)式で、受信エコー信号は(3)式で表され、(3)式のnn(t)はAWGNである。
【0063】
復調は、受信エコー信号にTX信号を掛け合わせることにより実現される。すなわち、下記(5)式により受信エコー信号は復調される。なお、上付き添え字のBBは、ベースバンド成分である事を表す。*は、複素共役を表す。
【0064】
【数3】
【0065】
また(5)式に於いては、下記(6.1)〜(6.3)式に定義した表記を用いており、(6.1)式はl(小文字のエル)番目のTX信号のキャリア周波数とm番目のTX信号のキャリア周波数との差分を表す。以下では、この差分周波数をサブキャリアと呼ぶことがある(l=mの場合、差分周波数は0となるが、これも特殊例としてカウントする)。
【0066】
【数4】
【0067】
さて、M個の異なるキャリア周波数を持つTX信号を同時に送信する探知測距装置においては、受信アンテナ毎に、M個のサブキャリアが存在する。したがって、本発明に準拠する探知測距装置では、個々の受信アンテナ毎にM個の周波数フィルタ(LPFまたはBPF)を備える事により、各受信アンテナからM組のプローブ信号由来の反射波のベースバンド成分を分離、取得する。図1(実施例1)に示す構成では、M=2なので、探知測距装置1はLPF23−1、23−2を有する。
【0068】
検討をより詳細な段階に進める為、次に、LPFの特性を(7)式で定義する。なお、(7)式では、簡単のため、位相特性等は無視している。また、LPFの場合を解析しておけば、フィルタをBPF等に変更しても同様に取り扱う事が可能である。
【0069】
【数5】
【0070】
(7)式のインパルスレスポンスは(8)式で表される。なお、ΩはLPFのカットオフ周波数に相当する。
【0071】
【数6】
【0072】
明らかに、LPFの出力信号は(9)式で表される。
【0073】
【数7】
【0074】
ここで、変調入力信号f(t)は時間の周期関数であるから、xk(t)=xk(t-z)とできる事に注意すれば、結局、(9)式の展開結果として(10)式を得る。なお、(9)式から(10)式への展開に於いて、信号処理の原理とは関係が薄いので、雑音成分を無視した。
【0075】
【数8】
【0076】
(10)式において、rectは矩形関数であり、LPFによるフィルタリング効果を表わしている。そして、(10)式で表される信号成分を、m=l(小文字のエル)の項と、m≠l(小文字のエル)の項に分解すると(この分解操作はミキサとフィルタによって自動的に行われる事は上述の通りである)、LPFの出力信号は(11)式で表される。ここで、分岐器21から出力される各信号のレベルは、分岐器21によって、単純に入力信号のM分の1に減衰するとした。また、(11)式では、再び雑音nn(t)も表記されている。
【0077】
【数9】
【0078】
(11)式において、右辺の第1項は、LPFを利用して抽出したい成分に相当する。ここで、xkは、(6.2)式に示すように、探知測距装置からターゲットkまでの距離による時間遅延:τkに依存し、ドップラー周波数:ωdm,kはキャリア周波数とターゲットの速度に依存する。また(4)式に示すように、φnm,kは、ターゲットkが存在する角度:θkに依存する。
【0079】
(11)式の右辺の第2項は、LPFにより遮断される成分に相当する。(6.1)式に記載の如く、δωcm,lはキャリア周波数間の差分を表わす。従って、この第2項の寄与が第1項に比べて十分小さいとき、エコー信号から目的とする周波数成分が抽出される。
この場合、例えば、ドップラー周波数を考慮したキャリア間周波数差に対して、LPFのカットオフ周波数を適切に決定すれば、(11)式の右辺の第2項は十分に小さくなる。
【0080】
例えば、M=2なる探知測距装置1においては、図3に示す信号が得られる。ここで、プローブ信号P1によって復調を行った場合、(11)式第1項の成分は周波数軸上で、図3(b)においてP1の位置に現れる。即ち、LPF23−1を通過する成分はP1の反射波に相当し、LPF23−1で遮断される成分はP2の反射波に相当する。
【0081】
同様に、プローブ信号P2によって復調を行った場合、(11)式第1項の成分は周波数軸上で、図3(c)においてP2の位置に現れる。即ち、LPF23−2を通過する成分はP2の反射波に相当し、LPF23−2で遮断される成分はP1の反射波に相当する。
【0082】
探知測距装置1においては、ドップラー周波数による帯域の変動を考慮して、復調後に、対応するLPFの通過帯域同士が干渉しないように、各プローブ信号のキャリア周波数が決定される。したがって、物理的に実在するN個の受信アンテナから同時にM×N組の信号ベクトルを生成することができる。
【0083】
ところで、(11)式の右辺の第1項中のxk(t)exp(-jωdl,kt)は一般的な探知測距装置によって得られるベースバンド成分である。そこで、以下、xk(t)exp(-jωdl,kt)を、単にxk(t)と表記する。すると、図1に示す探知測距装置1において取得される信号ベクトルは、下記(12)式で表される。
【0084】
【数10】
【0085】
信号ベクトルv1BB、v2BBは(13.1)式に定義するが、それぞれN個の成分を有し、各成分は(11)式で表される。また、ベースバンド信号成分x(t)は(13.2)式に定義するK次元ベクトルである。なお、n(t)はM×N次元の雑音信号ベクトルである。
【0086】
【数11】
【0087】
さらに、(14)式は角度行列Amを定義するものである。
【0088】
【数12】
【0089】
したがって、探知測距装置1では、例えば、図2に示す変調入力信号f(t)の周期Tm内に、開口合成が可能なM×N次元のデータベクトル(行列)が生成される。M×N次元のデータベクトル(行列)を利用したターゲットの角度推定は、上述の通り既知のアルゴリズムにより実現される。
【0090】
なお、(14)式の角度行列Aはプローブ信号のキャリア周波数に依存するので、適切な開口合成を実現するためには、通常、プローブ信号のキャリア周波数間の差分が小さい方が好ましい。一方、プローブ信号のキャリア周波数間の差分は復調後にLPF(または、BPF)でエコー信号の分離が可能となるよう決定する必要がある。しかしながら、復調処理後にレーダーのベースバンド信号が占有する帯域は高々数100kHz程度なので、例えば、キャリア周波数が76GHzまたは79GHzである場合、キャリア周波数間の差分を数MHzにまで小さくすることができる。
【0091】
<第2の実施形態>
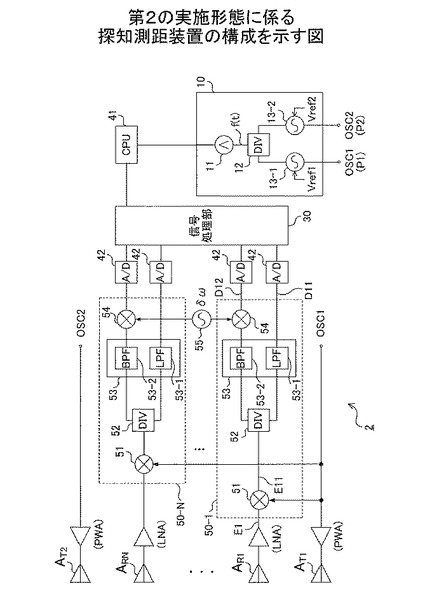
図5は、本発明の第2の実施形態に係る探知測距装置(探知測距装置2と呼ぶ)の構成図である。探知測距装置2は、信号生成回路10、送信アンテナ:AT1、AT2、受信アンテナ:AR1〜ARN、復調回路50−1〜50−N、信号処理部30、CPU41を有する。ここで、信号生成回路10、AT1、AT2、AR1〜ARN、信号処理部30、及びCPU41は、実質的に第1の実施形態と同じである。ただし、復調回路50−1〜50−Nの構成および動作は、第1の実施形態に於ける復調回路20−1〜20−Nとは異なっている。
【0092】
第1の実施形態に於ける各復調回路20−1〜20−Nは、複数のプローブ信号を利用してエコー信号を復調する。これに対して、第2の実施形態に於ける各復調回路50−1〜50−Nは、ミキサ51、分岐器52、フィルタ回路53、ミキサ54を有し、1つのプローブ信号を利用してエコー信号を復調する。フィルタ回路53は、ローパスフィルタ(LPF)53−1、およびバンドパスフィルタ(BPF)53−2を有する。以下、例として、受信アンテナ:AR1で受信されるエコー信号:E1を復調する復調回路50−1の動作を説明する。
【0093】
ミキサ51では、E1と複数のプローブ信号の中の任意の1つとを掛け合わせる。この例では、E1とプローブ信号:P1とを掛け合わせて復調エコー信号:E11を生成している。なお、ミキサ51は、例えば、アナログ乗算器である。
【0094】
復調エコー信号E11は分岐器52によってを分岐され、LPF53−1およびBPF53−2に導かれる。
【0095】
図3(b)を参照すると、LPF53−1は、E11から対応する周波数成分を抽出することでデータ信号D11を生成する。一方、BPF53−2は、E11から対応する周波数成分を抽出するので、ミキサ54に於いて、BPF53−2の出力とサブキャリア生成器55から生成されるサブキャリア信号とを掛け合わせる事によって、データ信号D12が生成される。なお、ミキサ54は、例えば、アナログ乗算器である。
【0096】
サブキャリア生成器55は、ωc1なるキャリア周波数を持つプローブ信号:P1とωc2なるキャリア周波数を持つプローブ信号:P2とに対して、キャリア周波数の差分周波数:δωを有するサブキャリア信号を生成する。サブキャリア生成器55は、生成したサブキャリア信号をミキサ54に与える。
【0097】
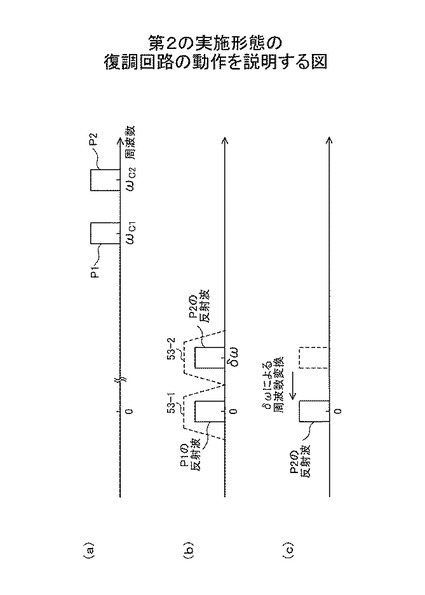
図6は、復調回路50−1の動作をより詳細に説明している。探知測距装置2は、図6(a)に示すように、P1およびP2を同時に送信するので、この点では、図3(a)に示す第1の実施形態と同様である。以下では、キャリア周波数ωc1とキャリア周波数ωc2との差分を「δω」と表記する。
【0098】
復調回路50−1には第1の実施形態と同様、AR1を介してE1が入力される。即ち、E1にはP1の反射波とP2の反射波とが含まれている。したがって、E1の周波数軸上に於ける各成分の位置関係は、図6(a)の様に表される。
【0099】
図6(b)には、ミキサ51、LPF53−1、BPF53−2の動作を示している。ミキサ51は、上述したように、E1とP1とを掛け合わせる。ここで、P1のキャリア周波数は、ωc1であるから、この操作の結果、E1は周波数:ωc1だけダウンコンバートされる。従って、E1に含まれるP1の反射波成分がベースバンド領域に現れる。一方、E1に含まれるP2の反射波成分は、ベースバンドに対して、サブキャリア周波数:δω分だけシフトした領域に現れる。
【0100】
LPF53−1のカットオフ周波数を、P1の反射波成分を通過させると共に、P2の反射波成分を遮断するように設定する事で、P1の反射波成分を表わすデータ信号D11のみがLPF53−1から出力される。
【0101】
一方、BPF53−2の通過帯域は、P2の反射波成分を通過させると共に、他の帯域の成分を遮断するように設定する事で、P2の反射波成分のみがBPF53−2から出力される。
【0102】
図6(c)は、ミキサ54の動作を説明する図である。ミキサ54は、上述のように、BPF53−2の出力とサブキャリア信号とを掛け合わせる。ここで、サブキャリア信号の周波数はδωであるから、BPF53−2の出力信号は、ミキサ54によって、ベースバンド領域に変換され、P2の反射波成分を表わすデータ信号D12が抽出される。
【0103】
このように、復調回路50−1は、AR1を介して受信したE1から、P1の反射波成分およびP2の反射波成分を互いに分離して出力する。換言すれば、復調回路50−1は、AR1を介して受信したE1から、2組のデータ信号D11、D12を生成する。
【0104】
復調回路50−1〜50−Nの構成および動作は互いに同様だから、第1の実施形態の如く、復調回路50−1〜50−Nにより、2N組のデータ信号が生成される。例えば、復調回路50−1のLPF53−1の出力信号(データ信号D11)は、(15)式により表される。
【0105】
【数13】
【0106】
また、復調回路50−Nのミキサ54の出力信号(データ信号DN2)は、(16)式により表される。
【0107】
【数14】
【0108】
そして信号処理部30は、第1の実施形態と同様、2N組のデータ信号を用いて探知測距装置からターゲットまでの距離、ターゲットの相対速度、ターゲットが存在する方向を推定する。
【0109】
なお、第2の実施形態の探知測距装置は、図5に示す構成に限定されるものではなく、様々な変形が可能である。例えば、図5に示す構成では、BPF53−2の出力側にミキサ54が設けられているが、BPF53−2をLPF53−2と交換し、その入力側にミキサ54を設けてもよい。
【0110】
<第3の実施形態>
図7は、第3の実施形態に係る探知測距装置の構成である(探知測距装置3と呼ぶ)。第3の実施形態の探知測距装置3は信号生成回路60、送信アンテナ:AT1、AT2、受信アンテナ:AR1〜ARN、復調回路20−1〜20−N、信号処理部30、およびCPU41を有する。図7に於いて、アンテナ:AT1〜AT2、AR1〜ARN、信号処理部30、CPU41は、実質的に第1の実施形態と同じである。但し、信号生成回路60の構成および動作が、第1の実施形態の信号生成回路10と異なっている。即ち、信号生成回路60はBB−OSC62−1、62−2、及び遅延素子63−1、63−2を有し、遅延素子63−1、63−2の出力が、RF−VCO13−1、13−2に入力される。
【0111】
BB−OSC62−1、62−2は、それぞれ、例えば図2に示すように、アップチャープ区間およびダウンチャープ区間を有する周期的な変調入力信号を生成する。ここで、BB−OSC62−1、62−2は互いに波形、振幅、周期(位相も含めれば後続の遅延素子63−1、63−2も省略できる)といったパラメータの異なる変調入力信号を生成することができる。勿論、BB−OSC62−1、62−2は、互いに同じ変調入力信号を生成してもよい。
【0112】
遅延素子63−1、63−2は、それぞれBB−OSC62−1、62−2からの出力信号を遅延させる。すなわち、遅延素子63−1は、BB−OSC62−1の出力信号をτ1だけ遅延させる。同様に、遅延素子63−2は、BB−OSC62−2の出力信号をτ2だけ遅延させる。但し、τ1、τ2は、各BB−OSCからの出力信号の特徴に応じて互いに同じであってもよいし、異なっていてもよい。或いは、τ1、τ2は、ゼロであってもよい。
【0113】
RF−VCO13−1、13−2の制御端子には、第1の実施形態同様、キャリア周波数を設定する為の基準電圧Vref1、Vref2に、BB−OSC62−1、62−2で生成された変調入力信号を、それぞれ遅延素子63−1、63−2でτ1、τ2だけ遅らせた信号:f1(t)、f2(t)が重畳して入力される。この結果、RF−VCO13−1からはVref1で設定されたキャリア周波数を中心として、f1(t)に沿って瞬時周波数が変化してゆく周波数変調信号(プローブ信号)P1が出力される。また、RF−VCO13−2からはVref2で設定されたキャリア周波数を中心として、f2(t)に沿って瞬時周波数が変化してゆく周波数変調信号(プローブ信号)P2が出力される。なお、OSC1を62−1〜13−1で、OSC2を62−2〜13−2で構成される発振器とする。
【0114】
このように、第3の実施形態においては、複数のプローブ信号のキャリア周波数が互いに異なるだけでなく、複数のプローブ信号の少なくとも1つのパラメータ(例えば、変調周期、位相等)が互いに異なっている。即ち、第3の実施形態によれば、第1の実施形態と比較して、プローブ信号間の干渉をさらに低減することができる。
【0115】
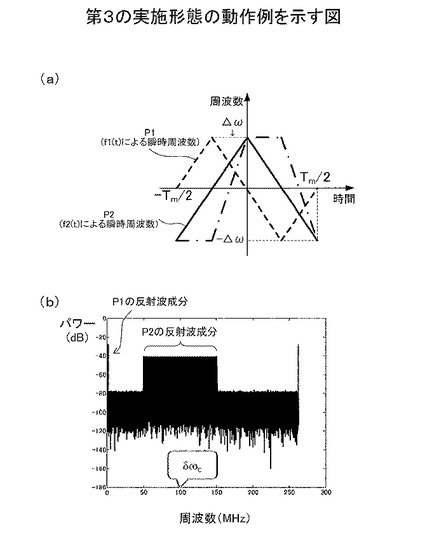
図8は、第3の実施形態の動作例を示す。図8(a)はP1、P2の瞬時周波数の経時変化を示したものである。これはBB−OSC62−1、62−2から出力される信号の波形、振幅、周期が互いに同じで、遅延素子63−1、63−2の設定値がτ1=Tm/2、τ2=ゼロなる場合である。この時、RF−VCO13−1の制御端子への入力:f1(t)の位相は、RF−VCO13−2の制御端子への入力:f2(t)に対してπ/2だけ遅れている。すなわち、P1の変調位相は、P2に対してπ/2だけ遅れている。なお、一点鎖線は、P1でP2の反射波を復調する際に生じる瞬時周波数の差分を表している。
【0116】
図8(b)は、図7に示す復調回路内のミキサ22−1の出力信号のシミュレーション結果である。すなわち、受信エコー信号にP1を掛け合わせることで得られる信号のスペクトラムが表わされている。なお、互いの信号の周波数軸上での位置関係の識別が容易になる様、P1、P2のキャリア周波数の差分:δωcを100MHzとしてある。
【0117】
この条件では、ベースバンド帯域にP1の反射波成分が、50MHz〜150MHzの帯域にP2の反射波成分が得られている。ここで、P1の反射波成分のスペクトラムとP2の反射波成分のスペクトラムとは、約50MHz隔てられているので、適切なカットオフ周波数を持つLPFを用いる事で、P1の反射波成分のみを抽出しつつ、P2の反射波成分を遮断することができる。なお、このシミュレーションでは、P1の反射波成分と比べてP2の反射波成分のパワーが約10dBm程度低くなっている。これは、P2の反射波成分の復調をP1で行った為に、復調後のP2の瞬時周波数が、図8(a)に示した如く台形波の状に変化してスペクトルが拡散するからである。
【0118】
なお、第3の実施形態の探知測距装置は、図7に示す構成に限定されるものではなく、様々な変形が可能である。例えば、P1、P2を生成するための変調入力信号の周期が互いに同じときは、1つの変調入力信号生成器から生成される信号を分岐して遅延素子63−1、63−2に導くようにしてもよい。
【0119】
<第4の実施形態>
第1〜第3の実施形態においては、探知測距装置は2つの送信アンテナを有している。しかし、本発明はこの構成に限定されるものではない。すなわち、探知測距装置は、3以上の送信アンテナを有するようにしてもよい。
【0120】
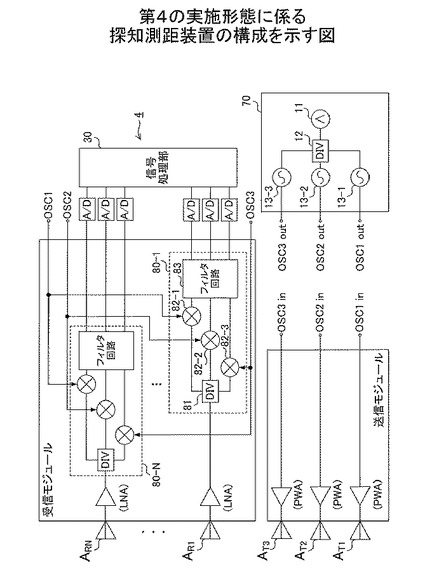
図9は第4の実施形態に係る探知測距装置の構成である(探知測距装置4と呼ぶ)。第4の実施形態の探知測距装置4は、信号生成回路70、送信アンテナ:AT1〜AT3、受信アンテナ:AR1〜ARN、復調回路80−1〜80−N、信号処理部30、およびCPU41を有する。すなわち、探知測距装置4は、3つの送信アンテナを有する。
【0121】
信号生成回路70の構成および動作は、第1の実施形態の信号生成回路10と類似している。ただし、信号生成回路70は、キャリア周波数が互いに異なる3つのプローブ信号P1〜P3を生成するために、変調入力信号生成器11、分岐器12、RF−VCO13−1〜13−3を有する。
【0122】
RF−VCO13−1〜13−3の制御端子には、キャリア周波数を設定する為の基準電圧:Vref1〜Vref3に、分岐器12で分岐されたf(t)が重畳された信号が入力され、(BB−OSC11、分岐器12、およびRF−VCO13−1〜13−3によって構成された)発振器OSC1〜3からは、キャリア周波数の異なる3つのプローブ信号:P1〜P3が生成される。
【0123】
この例では、AT1〜AT3はAR1〜ARNの一方の端部の外側に配置されており、AT1〜AT3およびAR1〜ARNは、直線上に配列されている。そして、AT1〜AT3は、それぞれ信号生成回路70で生成されたP1〜P3を、探知範囲に向けて同時に送信する。
【0124】
一方、AR1〜ARNで受信されたエコー信号は、各アンテナに対応する復調回路80−1〜80−Nに導かれる。復調回路80−1〜80−Nの構成および動作は、第1の実施形態の復調回路20−1〜20−Nと同様である。但し、復調回路80−1〜80−Nには、P1、P2、P3の反射波成分を互いに分離するために、分岐器81、ミキサ82−1〜82−3、フィルタ回路83が含まれている。
【0125】
分岐器81で分配された受信エコー信号は、ミキサ82−1〜82−3に於いて、それぞれP1〜P3と掛け合わされる。そして各ミキサの出力信号は、3個のLPFから構成されるフィルタ回路83を通過する。この様にして、1つの受信アンテナを介して受信されたエコー信号から3組のデータ信号が生成される。
【0126】
信号処理部30に於いて実行される処理は、実質的に、第1の実施形態と同じである。ただし、第4の実施形態においては3×N組のデータ信号を利用して、探知測距装置からターゲットまでの距離、ターゲットの相対速度、およびターゲットが存在する方向が推定される。
【0127】
<第5の実施形態>
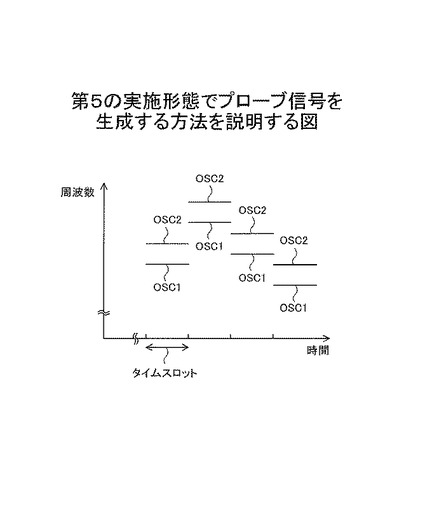
第5の実施形態においては、各プローブ信号のキャリア周波数(或いは、中心周波数)は、時間に対して常に一定でなく、それぞれ割り当てられたあるタイムスロット(幅は、スロット毎に任意で良い)毎に変化する。ここで、各プローブ信号のキャリア周波数は、例えば、図1の構成においては、RF−VCO13−1、13−2に印加される基準電圧:Vref1、Vref2に応じて制御される。即ち、Vref1、Vref2を先述のタイムスロットに沿って変化させれば、キャリア周波数が時間変化するプローブ信号:P1、P2が生成される。この場合、信号生成回路10は、例えば、不図示の基準電圧制御回路を有するようにしてもよい。或いは、CPU41からの指示に応じて各基準電圧を生成してもよい。
【0128】
BB−OSC11から出力されるf(t)を、上述の如く時間変化する基準電圧Vref1、Vref2にそれぞれ重畳すれば、各プローブ信号には、図2に示したアップチャープ区間およびダウンチャープ区間を有する様にできる。但し、各プローブ信号のキャリア周波数は、上述の通り時間に対して変化し、更に、キャリアの切り替え時点に於いて適切な補正を行わねば位相が連続性を有しないので、SN的には劣化する。なお、f(t)=0とすれば、本実施例は多周波CW信号をプローブ信号とする装置と等価になる。
【0129】
図10は、第5の実施形態で生成されたプローブ信号の時間−周波数軸上に於ける対応関係を示した図である。図10に示す例では、各プローブ信号のキャリア周波数は、或るタイムスロットを単位として変化する。単位タイムスロットは、特定の長さに限定されるものではないが、たとえば、図2に示すf(t)の周期の整数倍等としてもよい。そして、各プローブ信号のキャリア周波数を、例えば、ランダムまたは擬似ランダムに変化する様にすれば、本実施例は波数ホッピング型のスペクトラム拡散信号をプローブ信号とする装置と等価になる。この場合、周波数変化の最小ステップは、例えば、探知測距機能の要求値(距離分解能等)の実現に必要な帯域幅に相当する。
【0130】
<第6の実施形態>
探知測距装置は、探知範囲内に存在する複数のターゲットのそれぞれについて、探知測距装置からターゲットまでの距離、ターゲットの相対速度、ターゲットが存在する方向を推定する。ここで、探知するターゲットの個数が増えると、特に、信号処理部30による方向推定(すなわち、角度情報の推定)のための演算量が多くなる。このため、例えば、信号処理部30の能力が高くないときには、すべてのターゲットについてリアルタイムで角度情報の推定を行うことが困難な場合がある。
【0131】
そこで、第6の実施形態では、探知範囲内に存在する複数のターゲットに対して優先度を付与し、優先度の高いターゲットから順番にアジマス情報を推定する。具体的な優先度としては、例えば、探知測距装置から当該ターゲットまでの距離情報(距離ゲート等を用いて取得される)、当該ターゲットの速度情報(探知測距装置に対して接近しているのか、遠ざかっているのか、速度の大きさはどの程度か(こちらはドップラーゲート等を用いて取得される))、或いはそれらの情報を適切な関数を用いて組み合わせた量(例えば、特開2009−243947号公報参照)等が考えられる。
【0132】
単純に距離のみを指標に優先度判定を行うならば、探知測距装置の近くに位置しているターゲットに対して高い優先度が付与され、探知測距装置から遠く離れた位置に存際するターゲットに対して低い優先度が付与される。
【0133】
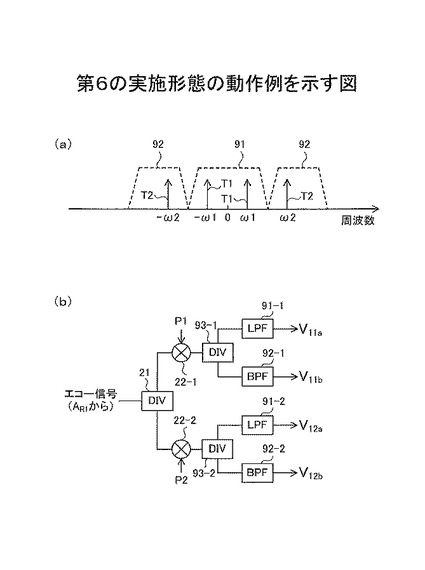
探知測距装置からターゲットまでの距離は、例えば、ベースバンド領域に変換されたエコー信号のスペクトラムのピークを検出することにより算出される。ここで、ターゲットT1が探知測距装置から近い位置に存在し、ターゲットT2が探知測距装置から遠く離れた位置に存在しているものとする。この場合、図11(a)に示すように、ターゲットT1に対応する1組のピークは、周波数ゼロに近い±ω1において検出される。また、ターゲットT2に対応する1組のピークは、周波数ゼロに対して±ω1よりも離れた±ω2において検出される。
【0134】
したがって、例えば、図11(a)に示すLPF91を使用すれば、ターゲットT1を表わす信号成分を抽出することができる。同様に、BPF92を使用すれば、ターゲットT2を表わす信号成分を抽出することができる。すなわち、ベースバンド領域に変換されたエコー信号を適切にフィルタリングすることにより、探知範囲内に位置する複数のターゲットを探知測距装置からの距離に応じてグループ化することができる。
【0135】
図11(b)は、探知測距装置からの距離に応じて複数のターゲットをグループ化する機能を実現する回路を示す。ここでは、受信アンテナAR1により受信されたエコー信号において、ターゲットをグループ化する構成について説明する。
【0136】
受信エコー信号は、分岐器21によってミキサ22−1、22−2に分配され、ミキサ22−1、22−2では、各々に入力された受信エコー信号とプローブ信号:P1、P2とを掛け合わせる(第1の実施形態の動作説明参照)。
【0137】
続いて、ミキサ22−1からの出力信号は、分岐器93によってLPF91−1およびBPF92−1に導かれる。LPF91−1は、図11(a)に示すカットオフ周波数を持つLPF91に相当し、探知測距装置からの距離が所定の閾値よりも小さいターゲット(以下、近距離ターゲット)を抽出する。よって、LPF91−1の出力:v11aは近距離ターゲットからのP1の反射波成分となる。またBPF92−1は、図11(a)に示す通過帯域を持つBPF92に相当し、探知測距装置からの距離が上記閾値以上に存在するターゲット(以下、遠距離ターゲット)を抽出する。即ち、BPF92−1の出力:v11bは遠距離ターゲットからのP1の反射波成分となる。
【0138】
ミキサ22−2の出力信号をフィルタリングするLPF91−2およびBPF92−2の動作は、LPF91−1およびBPF92−1と実質的に同じであるから、LPF91−2の出力:v12aは近距離ターゲットからのP2の反射波成分を、BPF92−2の出力:v12bは、遠距離ターゲットからのP2の反射波成分を表わす。
【0139】
受信アンテナ:AR1〜ARNのそれぞれの後段に設けられる各復調回路の構成および動作は、互いに実質的に同じである。つまり、第6の実施形態においては、近距離ターゲットに係わる2N組の信号:v11a〜vN2a、および遠距離ターゲットに係わる2N組の信号:v11b〜vN2bが生成される。
【0140】
なお、信号処理部30に於ける動作の変形例として、各演算サイクルで、v11a〜vN2aを優先的に用いて角度情報を推定し、ターゲットの脅威度から判定して、演算時間に余裕がある場合、v11b〜vN2bを付加的に用いて角度情報を推定してもよい。或いは、信号処理部30は、各演算サイクルで常に、v11a〜vN2aを用いた角度情報推定を行い、v11b〜vN2bを用いた角度情報推定、は複数の演算サイクルに対して1回だけ実施するようにしてもよい。
【0141】
第6の実施形態によれば、信号処理部30の能力が十分でない場合であっても、少なくとも近距離ターゲットについては確実にアジマス情報を得ることができる。よって、例えば、探知測距装置が自動車等に搭載される場合、重要度の高いターゲットを確実に探知できる。
【0142】
上述した第1〜第6の実施形態は、矛盾のない範囲で任意に組み合わせてもよい。例えば、上述の説明では、第3の実施形態(プローブ信号ごとに変調入力信号の位相や周期等が異なる方式)は、第1の実施形態の構成を敷衍した装置として示されているが、第2または第4の実施形態にも適用可能である。また、第5の実施形態(各キャリア周波数が時間に対して変化する方式)は、第1〜第4の実施形態のいずれにも適用可能である。第6の実施形態(ターゲットをグループ化する方式)も、第1〜第4の実施形態のいずれにも適用可能である。
【0143】
<第7の実施形態>
ターゲットの存在方向は、(14)式で定義される角度行列(または、アジマス行列)によって記述される。ところが、この角度行列を構成する要素φは(4)式に示されるが如く、プローブ信号のキャリア周波数((4)式では、波長で表記されている)に依存している。換言すれば、プローブ信号間でキャリア周波数の差が大きい場合、プローブ信号ごとに異なる角度行列が生成される。
【0144】
第7の実施形態はこの性質を利用して、角度推定の信頼性または整合性が算出される。ただし、プローブ信号ごとに生成される角度行列の差異が角度分解能に比べて十分大きな場合、開口合成による角度推定の精度が低下するおそれがある。したがって、第7の実施形態では、原則として開口合成は行わない。
【0145】
第7の実施形態の探知測距装置の構成は、上述の実施形態(例えば、第1の実施形態)と実質的に同じである。ただし、第7の実施形態では、プローブ信号P1のキャリア周波数ωc1とプローブ信号P2のキャリア周波数ωc2との差分δωは、フィルタリングによる信号分離を成立せしめる所定の閾値よりも大きい。また、信号処理部30の処理は、第1〜第6の実施形態とは異なっている。
【0146】
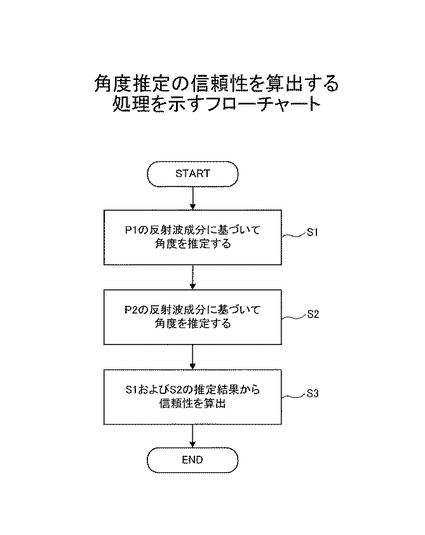
図12は、推定された角度の信頼性を算出する処理を示すフローチャートである。このフローチャートの処理は、信号処理部30により実行される。
【0147】
S1において、信号処理部30は、プローブ信号P1の反射波成分に基づいて、第1の角度推定を行う。例えば、図1に示す構成に於いて、P1の反射波成分を表わす各信号は復調回路20−1〜20−NのLPF23−1により得られる。そして、信号処理部30は、例えば、ターゲットk(k=1〜K)の存在する角度:θk1を推定するようにしてもよい。
【0148】
S2において、信号処理部30は、プローブ信号P2の反射波成分に基づいて、第2の角度推定を行う。図1に示す構成では、P2の反射波成分を表わす各信号は復調回路20−1〜20−NのLPF23−2により得られる。このとき、信号処理部30は、例えば、ターゲットk(k=1〜K)の存在する角度:θk2を推定するようにしてもよい。
【0149】
S3において、信号処理部30は、第1の角度推定の結果および第2の角度推定の結果に基づいて、角度推定の信頼性を算出する。例えば、ステップS1、S2でターゲットkの角度として、θk1およびθk2なる推定結果が得られた場合、信号処理部30は、例えば下式を利用して、ターゲット毎にθk1とθk2との間の距離:Dを計算する。
Dk=|θk1-θk2|2
距離Dは、その値が小さいほどP1、P2による推定の整合性が高い事を意味するので、信号処理部30では、例えば、各ターゲットについて得られたDkの平均または最小値を求め、この値をもって被推定角度の信頼性を評価することができる。
【0150】
このように、第7の実施形態では、周波数の異なる複数のプローブ信号を利用することにより推定された角度の信頼性を評価することができる。なお、上述の実施形態では、2つのプローブ信号を利用する構成を示したが、本発明はこれに限定されるものではない。すなわち、第7の実施形態の探知測距装置は、3以上の送信アンテナを利用して3以上のプローブ信号を送信してもよい。
【0151】
例えば、探知測距装置が3本の送信アンテナを有する場合、第1および第2のプローブ信号で開口合成を行い、第3のプローブ信号を利用して、開口合成後の角度推定の信頼性を評価してもよい。勿論、この場合、第1および第2のプローブ信号のキャリア周波数はフィルタリングで分離可能であり、且つ、開口合成が成立する程度に互いに近接していることが好ましい。
【0152】
以上記載した各実施例を含む実施形態に関し、さらに以下の付記を開示する。
(付記1)
互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、
前記M個のプローブ信号を送信するM個の送信素子と、
ターゲットからのエコー信号を受信するN個の受信素子と、
前記N個の受信素子のそれぞれに対して設けられ、前記M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、
前記N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、
を有する探知測距装置。
(付記2)
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号を分岐してM組のエコー信号を生成する分岐器と、
前記分岐器からの出力である前記M組のエコー信号と、互いに異なるキャリア周波数を持つ前記プローブ信号とを掛け合わせてM組の復調エコー信号を生成するM個のミキサと、
前記M個のミキサの出力であるM組の復調エコー信号からそれぞれ対応する周波数成分を抽出することで、前記M組のデータ信号を生成するフィルタ回路と、を有する
ことを特徴とする付記1に記載の探知測距装置。
(付記3)
前記フィルタ回路は前記M個の復調エコー信号から、それぞれの対応する周波数成分を抽出するM個のローパスフィルタを有する
ことを特徴とする付記2に記載の探知測距装置。
(付記4)
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号と、前記M個のプローブ信号の中の第1のプローブ信号とを掛け合わせることで復調エコー信号を生成する第1のミキサと、
前記第1のミキサの出力である復調エコー信号を分岐してM組の復調エコー信号を生成する分岐器と、
前記M組の復調エコー信号の中の1つから対応する周波数成分を抽出することにより前記第1のプローブ信号に対応するデータ信号を生成するローパスフィルタと、
前記M個の復調エコー信号の中の他の復調エコー信号から、それぞれ対応する周波数成分を抽出する1または複数のバンドパスフィルタと、
前記1または複数のバンドパスフィルタにより抽出される各周波数成分に、前記第1のプローブ信号と他の対応するプローブ信号との差分周波数を持つサブキャリア信号とをそれぞれ掛け合わせることで、前記第1のプローブ信号以外の1または複数のプローブ信号に対応する1または複数のデータ信号を生成する第2のミキサと、を有する
ことを特徴とする付記1に記載の探知測距装置。
(付記5)
前記信号生成回路は、
変調入力信号を生成する変調入力信号生成器と、
互いに異なる周波数で発振するM個の発振器と、を有し、
前記変調入力信号を前記M個の発振器に与えることにより、前記M個のプローブ信号を生成する
ことを特徴とする付記1に記載の探知測距装置。
(付記6)
前記変調入力信号生成器は、互いに位相、振幅、周期の少なくとも1つが異なるM個の変調入力信号を生成し、
前記M個の変調入力信号は、それぞれ対応する発振器に与えられる
ことを特徴とする付記5に記載の探知測距装置。
(付記7)
前記変調入力信号生成器は、互いに振幅、或いは周期の異なるM個の変調入力信号を生成し、
前記M個の変調入力信号は、それぞれ対応する発振器に与えられる
ことを特徴とする付記5に記載の探知測距装置。
(付記8)
前記M個の発振器により生成されるM個のプローブ信号のキャリア周波数は、それぞれ時間に対して、或いは所定のタイムスロットを単位として変化する
ことを特徴とする付記5に記載の探知測距装置。
(付記9)
前記復調回路は、各ミキサにより生成される各復調エコー信号からそれぞれ第1の周波数成分〜第Mの周波数成分を抽出することで第1のデータ信号〜第Mのデータ信号を生成し、
前記信号処理部は、前記復調回路により生成されるM×N組の第1のデータ信号に基づいて各ターゲットが存在する第1の角度を推定し、前記復調回路により生成されるM×N組の第m(m=2〜M)のデータ信号に基づいて、各ターゲットが存在する第mの角度を推定する
ことを特徴とする付記2に記載の探知測距装置。
(付記10)
互いに異なるキャリア周波数を有する第1〜第Mのプローブ信号を生成する信号生成回路と、
前記第1〜第Mのプローブ信号をそれぞれ送信する第1〜第Mの送信素子と、
ターゲットからのエコー信号を受信する複数の受信素子と、
前記複数の受信素子のそれぞれに対して設けられ、前記第1〜第Mのプローブ信号のうちの少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、更に前記復調エコー信号を周波数領域でフィルタリングして前記第1〜第Mのプローブ信号に対応する第1〜第Mのデータ信号を生成する複数の復調回路と、
前記複数の復調回路によって生成される複数の第1のデータ信号に基づいて前記各ターゲットについて第1の角度推定を行うと共に、前記複数の復調回路により生成される複数の第m(m=2〜M)のデータ信号に基づいて前記各ターゲットについて第2の角度推定を行い、前記第1の角度推定の結果および前記第mの角度推定の結果を利用して、各ターゲットについて推定された角度の信頼性を算出する信号処理部と、
を有する探知測距装置。
(付記11)
互いに異なるキャリア周波数を有するM個のプローブ信号を生成し、
M個の送信素子を利用して前記M個のプローブ信号を送信し、
N個の受信素子を利用してターゲットからのエコー信号を受信し、
各受信素子で受信される各エコー信号を、前記M個のプローブ信号の中の少なくとも1つを用いて復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成し、
M×N組のデータ信号に基づいてターゲットを探知する、
ことを特徴とする探知測距方法。
【符号の説明】
【0153】
1〜4 探知測距装置
10 信号生成回路
11 変調入力信号生成器(回路)
13−1、13−2 電圧制御発振器(RF−VCO)
20−1〜20−N 復調回路
21 分岐器
22−1、22−2 ミキサ
23−1、23−2 ローパスフィルタ(LPF)
30 信号処理部
50−1〜50−N 復調回路
51、54 ミキサ
53−1 ローパスフィルタ(LPF)
53−2 バンドパスフィルタ(BPF)
55 サブキャリア生成器
60 信号生成回路
61 変調入力信号生成回路
62−1、62−2 変調入力信号生成器
63−1 63−2 遅延素子
70 信号生成回路
80−1〜80−N 復調回路
91−1、91−2 ローパスフィルタ(LPF)
92−1、92−2 バンドパスフィルタ(BPF)
【技術分野】
【0001】
本発明は、ターゲットを探知する探知測距装置および探知測距方法に係わる。
【背景技術】
【0002】
従来より、電波(例えば、ミリ波)を利用して、ターゲットを探知する探知測距装置が実用化されている。探知測距装置は、探知領域にプローブ信号を放射し、ターゲットからの反射信号(すなわち、エコー信号)を受信する。そして、探知測距装置は、受信したエコー信号を解析することにより、ターゲットまでの視線方向相対距離(以下、単に距離と記す)、ターゲットの視線方向相対速度(以下、単に速度と記す)、ターゲットが存在する方向(角度)を推定する。このような探知測距装置は、例えば、等間隔で配置された複数の受信センサ素子を有し、各受信センサ素子により受信されるエコー信号の位相などに基づいて、ターゲットを探知する、各々の諸元(距離、速度、角度等)を推定する。
【0003】
上述の探知測距装置においては、受信センサ素子の個数を増やして受信センサアレーの開口を拡大すると、探知可能なターゲットの個数が増加し、更に角度推定の性能等も高くなる。この一方で、特に、自動車などに搭載する探知測距装置では、装置の小型/低コスト化が要求される。
【0004】
装置の小型化という観点からは、複数の送信センサ素子と複数の受信センサ素子とを有する構成を採用し、それらのセンサを時間分割方式で適切に切り替えることによって、受信センサアレーの実効開口を広くする技術が提案されている。しかしこの技術では、個々の送信センサ素子が占有するタイムスロット毎に、受信センサアレーを用いてエコー信号ベクトルを取得し、各々のタイムスロットで取得した信号ベクトルの位相を合せる必要があるので、ターゲットを探知するために要する時間が長くなってしまう。
【0005】
この問題を解決するために以下の探知測距方法が提案されている。即ち、複数の変調器において互いに直交する符号を用いて拡散されたプローブ信号を、複数の送信センサ素子から同時(少なくとも、装置の動作周期を単位時間として同時性を定義する。但し、複数の単位時間をまとめて新たに単位時間として考えても良い − 以下、同様)に放射する。そして、複数の受信用センサで受信された信号のそれぞれを、複数の分岐器で分岐し、そのそれぞれについて復調器において送信側で用いた符号と同じ符号により逆拡散する。(例えば、特許文献1)
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−80024号公報
【特許文献2】特開2010−243237号公報
【特許文献3】特開2010−145289号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
送信波を符号で拡散する方式を採用した探知測距装置は、ターゲットの探知時間を短縮するという観点からは好適な構造であるが、拡散符号の同期補足のための回路などを必要とするので、回路規模が大きくなり、従って、製造コストが上昇してしまう。
【0008】
本発明の課題は、複数の送信センサ素子および複数の受信センサ素子を有する探知測距装置の回路の簡略化を図ることである。
【課題を解決するための手段】
【0009】
本発明の1つの態様の探知測距装置は、互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、前記M個のプローブ信号を送信するM個の送信素子と、ターゲットからのエコー信号を受信するN個の受信素子と、前記N個の受信素子のそれぞれに対して設けられ、前記M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、前記N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、を有する。
【発明の効果】
【0010】
上述の態様によれば、複数の送信センサ素子および複数の受信センサ素子を有する探知測距装置の回路が簡略化される。
【図面の簡単な説明】
【0011】
【図1】第1の実施形態に係る探知測距装置の構成を示す図である。
【図2】変調入力信号の一例を示す図である。
【図3】第1の実施形態の復調回路の動作を説明する図である。
【図4】エコー信号の空間位相について説明する図である。
【図5】第2の実施形態に係る探知測距装置の構成を示す図である。
【図6】第2の実施形態の復調回路の動作を説明する図である。
【図7】第3の実施形態に係る探知測距装置の構成を示す図である。
【図8】第3の実施形態の動作例を示す図である。
【図9】第4の実施形態に係る探知測距装置の構成を示す図である。
【図10】第5の実施形態でプローブ信号を生成する方法を説明する図である。
【図11】第6の実施形態の動作例を示す図である。
【図12】角度推定の信頼性を算出する処理を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明の実施形態の探知測距装置は、複数の送信素子(送信センサ素子)および複数の受信素子(受信センサ素子)を有する。各送信センサ素子は、それぞれ、探知領域にプローブ信号を放射する。ここで、探知領域内にターゲット(被探知物体)が存在すると、プローブ信号はそのターゲットにより反射される。各受信センサ素子は、ターゲットからの反射信号(すなわち、エコー信号)を受信する。そして、探知測距装置は、受信したエコー信号の位相などを解析することにより、探知測距装置からターゲットまでの距離、探知測距装置に対するターゲットの相対速度、ターゲットが存在する方向を推定する。
【0013】
なお、以下に示す実施形態においては、探知測距装置としてレーダーの場合を具体例として説明を行うので、各送信センサ素子は、それぞれ送信アンテナであり、各受信センサ素子は、それぞれ受信アンテナである。
【0014】
<第1の実施形態>
図1は、第1の実施形態に係る探知測距装置(探知測距装置1と呼ぶ)の構成を示す。探知測距装置1は信号生成回路10、送信アンテナ:AT1〜AT2(即ち、M=2)、受信アンテナ:AR1〜ARN、復調回路20−1〜20−N、信号処理部30、及びCPU41を有する。以降、装置の動作を簡潔に説明する為、CPU41は探知測距装置1の動作の制御を、信号処理部30は探知測距処理をそれぞれ分担するものとし、CPU41の動作については説明を省略する。
【0015】
信号生成回路10は、変調入力信号生成器(BB−OSC: base band oscillator)11、分岐器12、互いに異なる中心周波数(キャリア周波数)で発振する複数の高周波電圧制御発振器(RF−VCO:radio frequency voltage-controlled oscillator)13−1、13−2を有する。即ち、信号生成回路10は、BB−OSCからの入力信号で変調された、キャリア周波の異なる複数のプローブ信号を生成する。
【0016】
BB−OSC11は変調入力信号f(t)を生成する。本実施例では、f(t)として図2に示す周期的な電圧信号を仮定している(勿論、他の波形でも良い事はいうまでもない)。図示のf(t)は、周期:Tm毎に、時間に沿って電圧がリニアに上昇するアップチャープ区間、および時間に沿って電圧がリニアに下降していくダウンチャープ区間を有する。なお、f(t)の周期:Tmは、主に距離や速度の分解能によって、その具体的な値が決定されるが、例えば、数10m秒程度の値である。また、電圧の値域もモノポーラでなく、バイポーラでも良い。
【0017】
BB−OSC11で生成されたf(t)は、分岐器(DIV)12を介してRF−VCO13−1、13−2の発振周波数を制御する制御信号として使用される。即ち、RF−VCOは、上記制御信号を入力できる端子(制御信号入力端子)を少なくとも1つは備えている。
【0018】
RF−VCO13−1、13−2は制御端子に印加される電圧(または、電流)に対応する周波数で発振する。なお、この明細書においては、「周波数」および「角周波数」を区別することなく「周波数」と呼ぶ。すなわち、「周波数」は、角周波数を含むものとする。
【0019】
さて、RF−VCO13−1の制御端子には、キャリア周波数をωc1に設定するための基準電圧Vref1と変調入力信号f(t)とを重畳して印加する事によって、RF−VCOの瞬時周波数はωc1を中心にf(t)に沿って変化してゆく。この様にして構成された周波数変調発振器をOSC1と記し、その出力であるプローブ信号をP1と記す。
【0020】
同様に、RF−VCO13−2の制御端子には、キャリア周波数をωc2に設定するための基準電圧Vref2と変調入力信号f(t)とを重畳して印加する事によって、RF−VCOの瞬時周波数はωc2を中心にf(t)に沿って変化してゆく。上記同様に構成された周波数変調発振器をOSC2と記し、その出力であるプローブ信号をP2と記す。
【0021】
勿論、例えば、RF−VCO13−1、13−2の共振素子が互いに異なる周波数で共振する様な回路構成を採用する事により、基準電圧Vref1、Vref2をf(t)に重畳する事無く、各RF−VCOのキャリア周波数を変更する様にしても良い。また、基準電圧Vref1、Vref2の与え方として、RF−VCO13−1、RF−VCO13−2のバイアス点を操作する方法もあり得る。
【0022】
図1の実施例では、信号生成回路10により生成されたプローブ信号:P1、P2は、それぞれに対応するパワーアンプ(PWA)で増幅され、送信アンテナ:AT1、AT2から探知領域に向けて同時に放射される。
【0023】
各受信アンテナ:AR1〜ARNは、P1、P2がターゲットで反射される事によって生成されたエコー信号を同時に受信する。受信アンテナ:AR1〜ARNによって受信される信号をそれぞれエコー信号E1〜ENと呼ぶことにする。簡単の為、本実施例では、送信アンテナ:AT1、AT2、および受信アンテナ:AR1〜ARNは直線上に配置されているものとし、更に、AT1、AT2はAR1〜ARNの両端の外側に配置されており、また、AR1〜ARNは等間隔で配置されているものとする。
【0024】
さて、P1、P2は探知領域に向かって同時に放射されたから、エコー信号E1〜ENは、それぞれ、P1の反射波およびP2の反射波が重ね合わされた形で含まれている。また、エコー信号E1〜ENには少なくとも1つ以上のターゲットからの反射波が含まれているものとする。
【0025】
AR1〜ARNで受信されたエコー信号E1〜ENは、各アンテナに対応する低雑音アンプ(LNA)で増幅された後に、復調回路20−1〜20−Nに導かれる。
【0026】
復調回路20−1〜20−Nは、個々の受信アンテナ:AR1〜ARNに対応して設けられており、信号生成回路10で生成されたプローブ信号:P1、P2の中の少なくとも1つを用いて、対応するエコー信号E1〜ENからそれぞれ2組のデータ信号を生成する。
【0027】
復調回路20−1〜20−Nの構成および動作は、互いにほぼ同じである。すなわち、各復調回路20−1〜20−Nは、それぞれ、分岐器(DIV)21、ミキサ22−1、22−2、フィルタ回路23を有する。以下、復調回路20−1の場合を具体例として、AR1で受信されたエコー信号E1が復調される迄の一連の動作を説明する。
【0028】
分岐器21はE1を分岐し、実質的に同じエコー信号を、例えばアナログ乗算器で構成された、ミキサ22−1と22−2とに導く。
【0029】
ミキサ22−1では、E1と信号生成回路10から出力されるP1とを掛け合わせる。すると、ミキサ22−1からの出力はプローブ信号:P1によってダウンコンバートされたE1のベースバンド成分E11となる(以下、同様の操作を経て取得された信号を復調エコー信号と呼称する)。
【0030】
同様に、ミキサ22−2では、E1と信号生成回路10から出力されるP2とを掛け合わせる。すると、ミキサ22−2からの出力はプローブ信号:P2でダウンコンバートされたE1のベースバンド成分E12となる。
【0031】
フィルタ回路23は、ミキサ22−1、22−2の出力信号をそれぞれフィルタリングするローパスフィルタ(LPF)23−1、23−2を有する。LPF23−1は、ミキサ22−1から出力される復調エコー信号E11から対応する周波数成分を抽出することでデータ信号D11を生成する。同様に、LPF23−2は、ミキサ22−2から出力される復調エコー信号E12から対応する周波数成分を抽出することで、データ信号D12を生成する。なお、「Dnm」は、n番目の受信アンテナを介して受信したエコー信号から抽出される、m番目のプローブ信号の反射波成分を表す。
【0032】
図3は、復調回路20−1の動作を説明する図である。この実施例では、探知測距装置1は、図3(a)に示すように、キャリア周波数ωc1のプローブ信号P1およびキャリア周波数ωc2のプローブ信号P2を送信する。以下の説明では、キャリア周波数ωc1とキャリア周波数ωc2との差分を「δω」と表記する。
【0033】
ここで、復調回路20−1には受信アンテナ:AR1を介してエコー信号E1が入力されるが、このE1には、プローブ信号:P1の反射波およびプローブ信号:P2の反射波が含まれている。よって、E1を周波数領域で表示すると、P1、P2に由来する反射波のスペクトラムは、周波数軸上で図3(a)の様な配置関係になる。
【0034】
図3(b)は、ミキサ22−1およびLPF23−1の動作を示す。ミキサ22−1は、上述したように、E1とキャリア周波数:ωc1なるP1とを掛け合わせる。E1にP1を掛け合わせるとE1はωc1だけダウンコンバートされる為、E1に含まれるP1の反射波成分は、ベースバンド領域に(前記E11として)現れる。一方、E1に含まれるP2の反射波成分は、ベースバンド領域からδωだけシフトした領域に現れる。
【0035】
LPF23−1のカットオフ周波数をP1の反射波成分を通過させ、P2の反射波成分を遮断するように設定する事で、LPF23−1はP2の反射波成分を遮断すると共に、P1の反射波成分を出力する。LPF23−1により抽出される周波数成分は、上述したデータ信号D11に相当する。
【0036】
図3(c)は、ミキサ22−2およびLPF23−2の動作を示す。ミキサ22−2は、上述したように、E1とキャリア周波数:ωc2なるP2とを掛け合わせる。E1にP2を掛け合わせるとE1はωc2だけダウンコンバートされる為、E1に含まれるP2の反射波成分は、ベースバンド領域に(前記E12として)現れる。一方、E1に含まれるP1の反射波成分は、ベースバンド領域からδωだけシフトした領域に現れる。
【0037】
LPF23−2のカットオフ周波数をP2の反射波成分を通過させ、P1の反射波成分を遮断するように設定する事で、LPF23−2はP1の反射波成分を遮断すると共に、P2の反射波成分を出力する。LPF23−2により抽出される周波数成分は、上述したデータ信号D12に相当する。
【0038】
尚、図3(b)および図3(c)のLPF出力の周波数軸に於ける位置関係は、P1、P2のキャリア周波数の大小関係で相対的な位置が定まる事はいうまでもない。
【0039】
このように、復調回路20−1のフィルタ回路23は、AR1を介して受信したE1からP1の反射波成分およびP2の反射波成分を互いに分離して出力する。つまり、復調回路20−1は、AR1を介して受信した1組のエコー信号:E1から2組のデータ信号D11、D12を生成する。
【0040】
復調回路20−1〜20−Nの動作は互いに同様だから、復調回路20−1〜20−Nにより、2N(M×N、本実施例ではM=2)組のデータ信号が生成される。すなわち、AR1〜ARNの受信信号に含まれるP1の反射波成分とAR1〜ARNの受信信号に含まれるP2の反射波成分とが同時に得られる。
【0041】
復調回路20−1〜20−Nから出力されるデータ信号は、それぞれ、A/Dコンバータ42によりデジタル信号に変換される。A/Dコンバータ42により得られるデジタル信号は、信号処理部30に与えられる。なお、実際に処理するデータ量は、基本周期をTmとし、時間軸方向へのサンプリング数をQとした場合、M×N×Q個となるが、ここでは表現を簡潔にする為、時間軸方向へのサンプリングについては明示しない。
【0042】
信号処理部30は、プロセッサおよび/またはデジタル演算のためのハードウェア回路を含む。そして、信号処理部30は、デジタル化された2N(一般にはM×N組であるが、本実施例ではM=2)組のデータ信号に基づいて、探知測距装置1からターゲットまでの距離、探知測距装置1に対するターゲットの速度、およびターゲットが存在する角度を推定する。
【0043】
信号処理部30では、少なくとも1以上のデータ信号を利用して、探知測距装置1からターゲットまでの距離およびターゲットの速度を推定する。この際、信号処理部30は、例えば、f(t)のアップチャープ区間およびダウンチャープ区間のそれぞれに於いて取得された時間領域のデータ信号にFFT演算等(変調入力信号が、例えば、鋸歯状波である場合のターゲット定位は、時間領域のデータ信号の自己相関から計算するので、必ずしもFFT演算を利用して周波数領域の信号に変換する必要は無い。装置の採用する変調方式に応じた回路形式の変形については、今後、深く立ち入らない)を施す事で周波数領域のデータ信号に変換する。
【0044】
そして、信号処理部30は、アップチャープ区間において得られるピーク周波数およびダウンチャープ区間において得られるピーク周波数に基づいて、探知測距装置1からターゲットまでの距離およびターゲットの速度を推定する。ピーク周波数からターゲットを定位する手法は教科書レベルの基礎事項であるから、本明細書での説明は割愛する。
【0045】
さらに、信号処理部30は、複数のデータ信号に既知の到来方向推定(ターゲット角度の推定、以下、到来方向推定とターゲットの角度推定なる文言とを特に区別しない)方法を利用してターゲットの方向を推定してもよい。
【0046】
到来方向推定方法としては、本発明を限定するものではないが、DBF(digital beam forming)法、MUSIC(multiple signal classification)アルゴリズム、PRISM(propagator method based on an improved spatial-smoothing matrix)アルゴリズム、ESPRIT(estimation of signal parameters via rotational invariance techniques)アルゴリズムなどが知られている。
【0047】
このように、第1の実施形態の探知測距装置では、各送信アンテナからキャリア周波数の異なるプローブ信号を同時に送信し、各受信アンテナを介してエコー信号を取得する。そして、周波数フィルタ(例えば、LPF)を用いて各エコー信号をフィルタリングすることにより、各エコー信号から各プローブ信号由来の反射波成分が抽出される。すなわち、M×N組の異なる反射波成分が得られる。したがって最も単純な場合、探知測距装置の備える受信アレーアンテナの物理開口が、実効的にM倍(参照文献にあるTSS型の開口合成同様、位相整合操作まで実現する機能を含めた構造まで敷衍して考えると、実効開口はM×N以下となる)になるので、探知性能または探知精度が向上する。勿論、Mは実際の送信アンテナの個数、Nは実際の受信アンテナの個数を表す。
【0048】
ここで、例えば、各送信アンテナから同じキャリア周波数のプローブ信号を送信する構成(比較例1)においては、各エコー信号に含まれる複数のプローブ信号の反射波成分を互いに分離することは困難である。したがって、比較例1においては、時間分割多重を採用し、各送信アンテナからプローブ信号を放射する時間区間として、少なくともTm以上の時間を割り当てる必要がある。この結果、ターゲットを探知するために要する時間が長くなる。
【0049】
これに対し、第1の実施形態の探知測距装置においては、各エコー信号に含まれる複数のプローブ信号の反射波成分は、周波数フィルタにより互いに分離される。即ち、1Tm時間の内に(勿論、同時送信/同時受信であるから、SNR向上等の他の目的で送信時間を延ばしても良い)、互いに分離された複数のプローブ信号の反射波成分を得ることができる。したがって、第1の実施形態の探知測距装置においては、比較例1と比較すると、ターゲットを探知するために要する時間が短くなる。
【0050】
比較例1の欠点を解決するために、各送信アンテナのプローブ信号を異なる符号で拡散する構成(比較例2)が提案されている。ところが、比較例2においては、受信アンテナ毎に各拡散符号の同期補足のための回路などを必要とする。このため、回路規模が大きくなり、現状、低コスト化という市場からの要求と相反する結果になってしまう。
【0051】
これに対し、第1の実施形態の探知測距装置においては、各エコー信号に含まれる複数のプローブ信号の反射波成分は、周波数フィルタという簡単な回路素子によって、複数のプローブ信号の反射波成分が互いに分離される。したがって、第1の実施形態の探知測距装置においては、比較例2と比較すると、探知測距装置の回路が簡略化される、低コストで装置が実現できる。
【0052】
次に、第1の実施形態の探知測距装置の動作を数学的に説明する。以下では、探知測距装置は、M個の送信アンテナおよびN個の受信アンテナを有するものとする。
【0053】
信号生成回路10は、互いに異なるキャリア周波数:ωcm(m=1〜M)を持つRF−VCOのそれぞれに、変調入力信号f(t)を入力することによって、プローブ信号を生成する。
【0054】
そして、探知測距装置は、上記複数のプローブ信号を探知範囲に向けて同時に送信する。このとき、送信アンテナm(m=1〜M)から送信されるプローブ信号vmTXは(1)式で表される。(1)式の上付き添え字は送信信号である事を表す。(2)式は変調入力信号を積分して得られるFMCW信号の位相項であり、vmTXの瞬時周波数はωcm+f(t)となる。なお、以下では、説明を簡単にするために、伝搬特性および装置の不完全性などの影響は無視するものとする。
【0055】
【数1】
【0056】
ここで、装置の探知範囲内にK個のターゲットが存在しているものとすると、受信アンテナn(n=1〜N)で受信した目標エコー信号vnRXは(3)式で表される。(3)式の上付き添え字RXは受信信号である事を示す。
【0057】
【数2】
【0058】
図4を参照しながら(3)〜(4)について説明する。図4の探知測距装置はM=2個の送信アンテナを有している。図4では、受信アンテナ:AR1の位置をX−Y座標の原点と定め、送信アンテナ:AT1、AT2および受信アンテナ:AR1〜ARNはX軸上に配置されているものとする。更に、隣接する個々の受信アンテナ:AR1〜ARNは互いに等しい間隔:dでX軸の正方向に向かって配置されており、また、Y軸を角度の0度として時計方向を角度の正方向とする。
【0059】
ターゲットk(k=1〜K)は、距離:dk、角度:θkの位置を、速度:vkで運動しているものとする。
【0060】
探知測距装置から放射されたプローブ信号がターゲットkで反射され、同装置に戻ってくるまでに要する時間(遅延時間τk)は2dk/c0で表され、ターゲットの速度に起因するドップラー周波数ωdm,kは2ωcmvk/c0で表される。なお、c0は光速度である。
【0061】
ターゲットkからのエコー信号は、AR1〜ARNが構成する受信アレーアンテナに対し、角度:θk方向からの平面波として到来するので、受信アンテナ:AR1を基準とした場合、ターゲットkからAR1までの伝播距離とn番目の受信アンテナまでの伝搬距離との差分はd(n-1)sinθkである。換言すれば、AR1を空間位相の0基準(ゼロ)とすれば、n番目の受信アンテナによって得られるエコー信号のm番目のキャリアに対する空間位相φnm,kは、(4)式で定義される。なお、λmは、m番目のキャリアの波長である。
【0062】
AR1〜ARNに続く各復調回路20−1〜20−Nでは、l(小文字のエル)番目のTX信号(プローブ信号)を利用して、受信エコー信号を復調する。なお、TX信号は(1)式で、受信エコー信号は(3)式で表され、(3)式のnn(t)はAWGNである。
【0063】
復調は、受信エコー信号にTX信号を掛け合わせることにより実現される。すなわち、下記(5)式により受信エコー信号は復調される。なお、上付き添え字のBBは、ベースバンド成分である事を表す。*は、複素共役を表す。
【0064】
【数3】
【0065】
また(5)式に於いては、下記(6.1)〜(6.3)式に定義した表記を用いており、(6.1)式はl(小文字のエル)番目のTX信号のキャリア周波数とm番目のTX信号のキャリア周波数との差分を表す。以下では、この差分周波数をサブキャリアと呼ぶことがある(l=mの場合、差分周波数は0となるが、これも特殊例としてカウントする)。
【0066】
【数4】
【0067】
さて、M個の異なるキャリア周波数を持つTX信号を同時に送信する探知測距装置においては、受信アンテナ毎に、M個のサブキャリアが存在する。したがって、本発明に準拠する探知測距装置では、個々の受信アンテナ毎にM個の周波数フィルタ(LPFまたはBPF)を備える事により、各受信アンテナからM組のプローブ信号由来の反射波のベースバンド成分を分離、取得する。図1(実施例1)に示す構成では、M=2なので、探知測距装置1はLPF23−1、23−2を有する。
【0068】
検討をより詳細な段階に進める為、次に、LPFの特性を(7)式で定義する。なお、(7)式では、簡単のため、位相特性等は無視している。また、LPFの場合を解析しておけば、フィルタをBPF等に変更しても同様に取り扱う事が可能である。
【0069】
【数5】
【0070】
(7)式のインパルスレスポンスは(8)式で表される。なお、ΩはLPFのカットオフ周波数に相当する。
【0071】
【数6】
【0072】
明らかに、LPFの出力信号は(9)式で表される。
【0073】
【数7】
【0074】
ここで、変調入力信号f(t)は時間の周期関数であるから、xk(t)=xk(t-z)とできる事に注意すれば、結局、(9)式の展開結果として(10)式を得る。なお、(9)式から(10)式への展開に於いて、信号処理の原理とは関係が薄いので、雑音成分を無視した。
【0075】
【数8】
【0076】
(10)式において、rectは矩形関数であり、LPFによるフィルタリング効果を表わしている。そして、(10)式で表される信号成分を、m=l(小文字のエル)の項と、m≠l(小文字のエル)の項に分解すると(この分解操作はミキサとフィルタによって自動的に行われる事は上述の通りである)、LPFの出力信号は(11)式で表される。ここで、分岐器21から出力される各信号のレベルは、分岐器21によって、単純に入力信号のM分の1に減衰するとした。また、(11)式では、再び雑音nn(t)も表記されている。
【0077】
【数9】
【0078】
(11)式において、右辺の第1項は、LPFを利用して抽出したい成分に相当する。ここで、xkは、(6.2)式に示すように、探知測距装置からターゲットkまでの距離による時間遅延:τkに依存し、ドップラー周波数:ωdm,kはキャリア周波数とターゲットの速度に依存する。また(4)式に示すように、φnm,kは、ターゲットkが存在する角度:θkに依存する。
【0079】
(11)式の右辺の第2項は、LPFにより遮断される成分に相当する。(6.1)式に記載の如く、δωcm,lはキャリア周波数間の差分を表わす。従って、この第2項の寄与が第1項に比べて十分小さいとき、エコー信号から目的とする周波数成分が抽出される。
この場合、例えば、ドップラー周波数を考慮したキャリア間周波数差に対して、LPFのカットオフ周波数を適切に決定すれば、(11)式の右辺の第2項は十分に小さくなる。
【0080】
例えば、M=2なる探知測距装置1においては、図3に示す信号が得られる。ここで、プローブ信号P1によって復調を行った場合、(11)式第1項の成分は周波数軸上で、図3(b)においてP1の位置に現れる。即ち、LPF23−1を通過する成分はP1の反射波に相当し、LPF23−1で遮断される成分はP2の反射波に相当する。
【0081】
同様に、プローブ信号P2によって復調を行った場合、(11)式第1項の成分は周波数軸上で、図3(c)においてP2の位置に現れる。即ち、LPF23−2を通過する成分はP2の反射波に相当し、LPF23−2で遮断される成分はP1の反射波に相当する。
【0082】
探知測距装置1においては、ドップラー周波数による帯域の変動を考慮して、復調後に、対応するLPFの通過帯域同士が干渉しないように、各プローブ信号のキャリア周波数が決定される。したがって、物理的に実在するN個の受信アンテナから同時にM×N組の信号ベクトルを生成することができる。
【0083】
ところで、(11)式の右辺の第1項中のxk(t)exp(-jωdl,kt)は一般的な探知測距装置によって得られるベースバンド成分である。そこで、以下、xk(t)exp(-jωdl,kt)を、単にxk(t)と表記する。すると、図1に示す探知測距装置1において取得される信号ベクトルは、下記(12)式で表される。
【0084】
【数10】
【0085】
信号ベクトルv1BB、v2BBは(13.1)式に定義するが、それぞれN個の成分を有し、各成分は(11)式で表される。また、ベースバンド信号成分x(t)は(13.2)式に定義するK次元ベクトルである。なお、n(t)はM×N次元の雑音信号ベクトルである。
【0086】
【数11】
【0087】
さらに、(14)式は角度行列Amを定義するものである。
【0088】
【数12】
【0089】
したがって、探知測距装置1では、例えば、図2に示す変調入力信号f(t)の周期Tm内に、開口合成が可能なM×N次元のデータベクトル(行列)が生成される。M×N次元のデータベクトル(行列)を利用したターゲットの角度推定は、上述の通り既知のアルゴリズムにより実現される。
【0090】
なお、(14)式の角度行列Aはプローブ信号のキャリア周波数に依存するので、適切な開口合成を実現するためには、通常、プローブ信号のキャリア周波数間の差分が小さい方が好ましい。一方、プローブ信号のキャリア周波数間の差分は復調後にLPF(または、BPF)でエコー信号の分離が可能となるよう決定する必要がある。しかしながら、復調処理後にレーダーのベースバンド信号が占有する帯域は高々数100kHz程度なので、例えば、キャリア周波数が76GHzまたは79GHzである場合、キャリア周波数間の差分を数MHzにまで小さくすることができる。
【0091】
<第2の実施形態>
図5は、本発明の第2の実施形態に係る探知測距装置(探知測距装置2と呼ぶ)の構成図である。探知測距装置2は、信号生成回路10、送信アンテナ:AT1、AT2、受信アンテナ:AR1〜ARN、復調回路50−1〜50−N、信号処理部30、CPU41を有する。ここで、信号生成回路10、AT1、AT2、AR1〜ARN、信号処理部30、及びCPU41は、実質的に第1の実施形態と同じである。ただし、復調回路50−1〜50−Nの構成および動作は、第1の実施形態に於ける復調回路20−1〜20−Nとは異なっている。
【0092】
第1の実施形態に於ける各復調回路20−1〜20−Nは、複数のプローブ信号を利用してエコー信号を復調する。これに対して、第2の実施形態に於ける各復調回路50−1〜50−Nは、ミキサ51、分岐器52、フィルタ回路53、ミキサ54を有し、1つのプローブ信号を利用してエコー信号を復調する。フィルタ回路53は、ローパスフィルタ(LPF)53−1、およびバンドパスフィルタ(BPF)53−2を有する。以下、例として、受信アンテナ:AR1で受信されるエコー信号:E1を復調する復調回路50−1の動作を説明する。
【0093】
ミキサ51では、E1と複数のプローブ信号の中の任意の1つとを掛け合わせる。この例では、E1とプローブ信号:P1とを掛け合わせて復調エコー信号:E11を生成している。なお、ミキサ51は、例えば、アナログ乗算器である。
【0094】
復調エコー信号E11は分岐器52によってを分岐され、LPF53−1およびBPF53−2に導かれる。
【0095】
図3(b)を参照すると、LPF53−1は、E11から対応する周波数成分を抽出することでデータ信号D11を生成する。一方、BPF53−2は、E11から対応する周波数成分を抽出するので、ミキサ54に於いて、BPF53−2の出力とサブキャリア生成器55から生成されるサブキャリア信号とを掛け合わせる事によって、データ信号D12が生成される。なお、ミキサ54は、例えば、アナログ乗算器である。
【0096】
サブキャリア生成器55は、ωc1なるキャリア周波数を持つプローブ信号:P1とωc2なるキャリア周波数を持つプローブ信号:P2とに対して、キャリア周波数の差分周波数:δωを有するサブキャリア信号を生成する。サブキャリア生成器55は、生成したサブキャリア信号をミキサ54に与える。
【0097】
図6は、復調回路50−1の動作をより詳細に説明している。探知測距装置2は、図6(a)に示すように、P1およびP2を同時に送信するので、この点では、図3(a)に示す第1の実施形態と同様である。以下では、キャリア周波数ωc1とキャリア周波数ωc2との差分を「δω」と表記する。
【0098】
復調回路50−1には第1の実施形態と同様、AR1を介してE1が入力される。即ち、E1にはP1の反射波とP2の反射波とが含まれている。したがって、E1の周波数軸上に於ける各成分の位置関係は、図6(a)の様に表される。
【0099】
図6(b)には、ミキサ51、LPF53−1、BPF53−2の動作を示している。ミキサ51は、上述したように、E1とP1とを掛け合わせる。ここで、P1のキャリア周波数は、ωc1であるから、この操作の結果、E1は周波数:ωc1だけダウンコンバートされる。従って、E1に含まれるP1の反射波成分がベースバンド領域に現れる。一方、E1に含まれるP2の反射波成分は、ベースバンドに対して、サブキャリア周波数:δω分だけシフトした領域に現れる。
【0100】
LPF53−1のカットオフ周波数を、P1の反射波成分を通過させると共に、P2の反射波成分を遮断するように設定する事で、P1の反射波成分を表わすデータ信号D11のみがLPF53−1から出力される。
【0101】
一方、BPF53−2の通過帯域は、P2の反射波成分を通過させると共に、他の帯域の成分を遮断するように設定する事で、P2の反射波成分のみがBPF53−2から出力される。
【0102】
図6(c)は、ミキサ54の動作を説明する図である。ミキサ54は、上述のように、BPF53−2の出力とサブキャリア信号とを掛け合わせる。ここで、サブキャリア信号の周波数はδωであるから、BPF53−2の出力信号は、ミキサ54によって、ベースバンド領域に変換され、P2の反射波成分を表わすデータ信号D12が抽出される。
【0103】
このように、復調回路50−1は、AR1を介して受信したE1から、P1の反射波成分およびP2の反射波成分を互いに分離して出力する。換言すれば、復調回路50−1は、AR1を介して受信したE1から、2組のデータ信号D11、D12を生成する。
【0104】
復調回路50−1〜50−Nの構成および動作は互いに同様だから、第1の実施形態の如く、復調回路50−1〜50−Nにより、2N組のデータ信号が生成される。例えば、復調回路50−1のLPF53−1の出力信号(データ信号D11)は、(15)式により表される。
【0105】
【数13】
【0106】
また、復調回路50−Nのミキサ54の出力信号(データ信号DN2)は、(16)式により表される。
【0107】
【数14】
【0108】
そして信号処理部30は、第1の実施形態と同様、2N組のデータ信号を用いて探知測距装置からターゲットまでの距離、ターゲットの相対速度、ターゲットが存在する方向を推定する。
【0109】
なお、第2の実施形態の探知測距装置は、図5に示す構成に限定されるものではなく、様々な変形が可能である。例えば、図5に示す構成では、BPF53−2の出力側にミキサ54が設けられているが、BPF53−2をLPF53−2と交換し、その入力側にミキサ54を設けてもよい。
【0110】
<第3の実施形態>
図7は、第3の実施形態に係る探知測距装置の構成である(探知測距装置3と呼ぶ)。第3の実施形態の探知測距装置3は信号生成回路60、送信アンテナ:AT1、AT2、受信アンテナ:AR1〜ARN、復調回路20−1〜20−N、信号処理部30、およびCPU41を有する。図7に於いて、アンテナ:AT1〜AT2、AR1〜ARN、信号処理部30、CPU41は、実質的に第1の実施形態と同じである。但し、信号生成回路60の構成および動作が、第1の実施形態の信号生成回路10と異なっている。即ち、信号生成回路60はBB−OSC62−1、62−2、及び遅延素子63−1、63−2を有し、遅延素子63−1、63−2の出力が、RF−VCO13−1、13−2に入力される。
【0111】
BB−OSC62−1、62−2は、それぞれ、例えば図2に示すように、アップチャープ区間およびダウンチャープ区間を有する周期的な変調入力信号を生成する。ここで、BB−OSC62−1、62−2は互いに波形、振幅、周期(位相も含めれば後続の遅延素子63−1、63−2も省略できる)といったパラメータの異なる変調入力信号を生成することができる。勿論、BB−OSC62−1、62−2は、互いに同じ変調入力信号を生成してもよい。
【0112】
遅延素子63−1、63−2は、それぞれBB−OSC62−1、62−2からの出力信号を遅延させる。すなわち、遅延素子63−1は、BB−OSC62−1の出力信号をτ1だけ遅延させる。同様に、遅延素子63−2は、BB−OSC62−2の出力信号をτ2だけ遅延させる。但し、τ1、τ2は、各BB−OSCからの出力信号の特徴に応じて互いに同じであってもよいし、異なっていてもよい。或いは、τ1、τ2は、ゼロであってもよい。
【0113】
RF−VCO13−1、13−2の制御端子には、第1の実施形態同様、キャリア周波数を設定する為の基準電圧Vref1、Vref2に、BB−OSC62−1、62−2で生成された変調入力信号を、それぞれ遅延素子63−1、63−2でτ1、τ2だけ遅らせた信号:f1(t)、f2(t)が重畳して入力される。この結果、RF−VCO13−1からはVref1で設定されたキャリア周波数を中心として、f1(t)に沿って瞬時周波数が変化してゆく周波数変調信号(プローブ信号)P1が出力される。また、RF−VCO13−2からはVref2で設定されたキャリア周波数を中心として、f2(t)に沿って瞬時周波数が変化してゆく周波数変調信号(プローブ信号)P2が出力される。なお、OSC1を62−1〜13−1で、OSC2を62−2〜13−2で構成される発振器とする。
【0114】
このように、第3の実施形態においては、複数のプローブ信号のキャリア周波数が互いに異なるだけでなく、複数のプローブ信号の少なくとも1つのパラメータ(例えば、変調周期、位相等)が互いに異なっている。即ち、第3の実施形態によれば、第1の実施形態と比較して、プローブ信号間の干渉をさらに低減することができる。
【0115】
図8は、第3の実施形態の動作例を示す。図8(a)はP1、P2の瞬時周波数の経時変化を示したものである。これはBB−OSC62−1、62−2から出力される信号の波形、振幅、周期が互いに同じで、遅延素子63−1、63−2の設定値がτ1=Tm/2、τ2=ゼロなる場合である。この時、RF−VCO13−1の制御端子への入力:f1(t)の位相は、RF−VCO13−2の制御端子への入力:f2(t)に対してπ/2だけ遅れている。すなわち、P1の変調位相は、P2に対してπ/2だけ遅れている。なお、一点鎖線は、P1でP2の反射波を復調する際に生じる瞬時周波数の差分を表している。
【0116】
図8(b)は、図7に示す復調回路内のミキサ22−1の出力信号のシミュレーション結果である。すなわち、受信エコー信号にP1を掛け合わせることで得られる信号のスペクトラムが表わされている。なお、互いの信号の周波数軸上での位置関係の識別が容易になる様、P1、P2のキャリア周波数の差分:δωcを100MHzとしてある。
【0117】
この条件では、ベースバンド帯域にP1の反射波成分が、50MHz〜150MHzの帯域にP2の反射波成分が得られている。ここで、P1の反射波成分のスペクトラムとP2の反射波成分のスペクトラムとは、約50MHz隔てられているので、適切なカットオフ周波数を持つLPFを用いる事で、P1の反射波成分のみを抽出しつつ、P2の反射波成分を遮断することができる。なお、このシミュレーションでは、P1の反射波成分と比べてP2の反射波成分のパワーが約10dBm程度低くなっている。これは、P2の反射波成分の復調をP1で行った為に、復調後のP2の瞬時周波数が、図8(a)に示した如く台形波の状に変化してスペクトルが拡散するからである。
【0118】
なお、第3の実施形態の探知測距装置は、図7に示す構成に限定されるものではなく、様々な変形が可能である。例えば、P1、P2を生成するための変調入力信号の周期が互いに同じときは、1つの変調入力信号生成器から生成される信号を分岐して遅延素子63−1、63−2に導くようにしてもよい。
【0119】
<第4の実施形態>
第1〜第3の実施形態においては、探知測距装置は2つの送信アンテナを有している。しかし、本発明はこの構成に限定されるものではない。すなわち、探知測距装置は、3以上の送信アンテナを有するようにしてもよい。
【0120】
図9は第4の実施形態に係る探知測距装置の構成である(探知測距装置4と呼ぶ)。第4の実施形態の探知測距装置4は、信号生成回路70、送信アンテナ:AT1〜AT3、受信アンテナ:AR1〜ARN、復調回路80−1〜80−N、信号処理部30、およびCPU41を有する。すなわち、探知測距装置4は、3つの送信アンテナを有する。
【0121】
信号生成回路70の構成および動作は、第1の実施形態の信号生成回路10と類似している。ただし、信号生成回路70は、キャリア周波数が互いに異なる3つのプローブ信号P1〜P3を生成するために、変調入力信号生成器11、分岐器12、RF−VCO13−1〜13−3を有する。
【0122】
RF−VCO13−1〜13−3の制御端子には、キャリア周波数を設定する為の基準電圧:Vref1〜Vref3に、分岐器12で分岐されたf(t)が重畳された信号が入力され、(BB−OSC11、分岐器12、およびRF−VCO13−1〜13−3によって構成された)発振器OSC1〜3からは、キャリア周波数の異なる3つのプローブ信号:P1〜P3が生成される。
【0123】
この例では、AT1〜AT3はAR1〜ARNの一方の端部の外側に配置されており、AT1〜AT3およびAR1〜ARNは、直線上に配列されている。そして、AT1〜AT3は、それぞれ信号生成回路70で生成されたP1〜P3を、探知範囲に向けて同時に送信する。
【0124】
一方、AR1〜ARNで受信されたエコー信号は、各アンテナに対応する復調回路80−1〜80−Nに導かれる。復調回路80−1〜80−Nの構成および動作は、第1の実施形態の復調回路20−1〜20−Nと同様である。但し、復調回路80−1〜80−Nには、P1、P2、P3の反射波成分を互いに分離するために、分岐器81、ミキサ82−1〜82−3、フィルタ回路83が含まれている。
【0125】
分岐器81で分配された受信エコー信号は、ミキサ82−1〜82−3に於いて、それぞれP1〜P3と掛け合わされる。そして各ミキサの出力信号は、3個のLPFから構成されるフィルタ回路83を通過する。この様にして、1つの受信アンテナを介して受信されたエコー信号から3組のデータ信号が生成される。
【0126】
信号処理部30に於いて実行される処理は、実質的に、第1の実施形態と同じである。ただし、第4の実施形態においては3×N組のデータ信号を利用して、探知測距装置からターゲットまでの距離、ターゲットの相対速度、およびターゲットが存在する方向が推定される。
【0127】
<第5の実施形態>
第5の実施形態においては、各プローブ信号のキャリア周波数(或いは、中心周波数)は、時間に対して常に一定でなく、それぞれ割り当てられたあるタイムスロット(幅は、スロット毎に任意で良い)毎に変化する。ここで、各プローブ信号のキャリア周波数は、例えば、図1の構成においては、RF−VCO13−1、13−2に印加される基準電圧:Vref1、Vref2に応じて制御される。即ち、Vref1、Vref2を先述のタイムスロットに沿って変化させれば、キャリア周波数が時間変化するプローブ信号:P1、P2が生成される。この場合、信号生成回路10は、例えば、不図示の基準電圧制御回路を有するようにしてもよい。或いは、CPU41からの指示に応じて各基準電圧を生成してもよい。
【0128】
BB−OSC11から出力されるf(t)を、上述の如く時間変化する基準電圧Vref1、Vref2にそれぞれ重畳すれば、各プローブ信号には、図2に示したアップチャープ区間およびダウンチャープ区間を有する様にできる。但し、各プローブ信号のキャリア周波数は、上述の通り時間に対して変化し、更に、キャリアの切り替え時点に於いて適切な補正を行わねば位相が連続性を有しないので、SN的には劣化する。なお、f(t)=0とすれば、本実施例は多周波CW信号をプローブ信号とする装置と等価になる。
【0129】
図10は、第5の実施形態で生成されたプローブ信号の時間−周波数軸上に於ける対応関係を示した図である。図10に示す例では、各プローブ信号のキャリア周波数は、或るタイムスロットを単位として変化する。単位タイムスロットは、特定の長さに限定されるものではないが、たとえば、図2に示すf(t)の周期の整数倍等としてもよい。そして、各プローブ信号のキャリア周波数を、例えば、ランダムまたは擬似ランダムに変化する様にすれば、本実施例は波数ホッピング型のスペクトラム拡散信号をプローブ信号とする装置と等価になる。この場合、周波数変化の最小ステップは、例えば、探知測距機能の要求値(距離分解能等)の実現に必要な帯域幅に相当する。
【0130】
<第6の実施形態>
探知測距装置は、探知範囲内に存在する複数のターゲットのそれぞれについて、探知測距装置からターゲットまでの距離、ターゲットの相対速度、ターゲットが存在する方向を推定する。ここで、探知するターゲットの個数が増えると、特に、信号処理部30による方向推定(すなわち、角度情報の推定)のための演算量が多くなる。このため、例えば、信号処理部30の能力が高くないときには、すべてのターゲットについてリアルタイムで角度情報の推定を行うことが困難な場合がある。
【0131】
そこで、第6の実施形態では、探知範囲内に存在する複数のターゲットに対して優先度を付与し、優先度の高いターゲットから順番にアジマス情報を推定する。具体的な優先度としては、例えば、探知測距装置から当該ターゲットまでの距離情報(距離ゲート等を用いて取得される)、当該ターゲットの速度情報(探知測距装置に対して接近しているのか、遠ざかっているのか、速度の大きさはどの程度か(こちらはドップラーゲート等を用いて取得される))、或いはそれらの情報を適切な関数を用いて組み合わせた量(例えば、特開2009−243947号公報参照)等が考えられる。
【0132】
単純に距離のみを指標に優先度判定を行うならば、探知測距装置の近くに位置しているターゲットに対して高い優先度が付与され、探知測距装置から遠く離れた位置に存際するターゲットに対して低い優先度が付与される。
【0133】
探知測距装置からターゲットまでの距離は、例えば、ベースバンド領域に変換されたエコー信号のスペクトラムのピークを検出することにより算出される。ここで、ターゲットT1が探知測距装置から近い位置に存在し、ターゲットT2が探知測距装置から遠く離れた位置に存在しているものとする。この場合、図11(a)に示すように、ターゲットT1に対応する1組のピークは、周波数ゼロに近い±ω1において検出される。また、ターゲットT2に対応する1組のピークは、周波数ゼロに対して±ω1よりも離れた±ω2において検出される。
【0134】
したがって、例えば、図11(a)に示すLPF91を使用すれば、ターゲットT1を表わす信号成分を抽出することができる。同様に、BPF92を使用すれば、ターゲットT2を表わす信号成分を抽出することができる。すなわち、ベースバンド領域に変換されたエコー信号を適切にフィルタリングすることにより、探知範囲内に位置する複数のターゲットを探知測距装置からの距離に応じてグループ化することができる。
【0135】
図11(b)は、探知測距装置からの距離に応じて複数のターゲットをグループ化する機能を実現する回路を示す。ここでは、受信アンテナAR1により受信されたエコー信号において、ターゲットをグループ化する構成について説明する。
【0136】
受信エコー信号は、分岐器21によってミキサ22−1、22−2に分配され、ミキサ22−1、22−2では、各々に入力された受信エコー信号とプローブ信号:P1、P2とを掛け合わせる(第1の実施形態の動作説明参照)。
【0137】
続いて、ミキサ22−1からの出力信号は、分岐器93によってLPF91−1およびBPF92−1に導かれる。LPF91−1は、図11(a)に示すカットオフ周波数を持つLPF91に相当し、探知測距装置からの距離が所定の閾値よりも小さいターゲット(以下、近距離ターゲット)を抽出する。よって、LPF91−1の出力:v11aは近距離ターゲットからのP1の反射波成分となる。またBPF92−1は、図11(a)に示す通過帯域を持つBPF92に相当し、探知測距装置からの距離が上記閾値以上に存在するターゲット(以下、遠距離ターゲット)を抽出する。即ち、BPF92−1の出力:v11bは遠距離ターゲットからのP1の反射波成分となる。
【0138】
ミキサ22−2の出力信号をフィルタリングするLPF91−2およびBPF92−2の動作は、LPF91−1およびBPF92−1と実質的に同じであるから、LPF91−2の出力:v12aは近距離ターゲットからのP2の反射波成分を、BPF92−2の出力:v12bは、遠距離ターゲットからのP2の反射波成分を表わす。
【0139】
受信アンテナ:AR1〜ARNのそれぞれの後段に設けられる各復調回路の構成および動作は、互いに実質的に同じである。つまり、第6の実施形態においては、近距離ターゲットに係わる2N組の信号:v11a〜vN2a、および遠距離ターゲットに係わる2N組の信号:v11b〜vN2bが生成される。
【0140】
なお、信号処理部30に於ける動作の変形例として、各演算サイクルで、v11a〜vN2aを優先的に用いて角度情報を推定し、ターゲットの脅威度から判定して、演算時間に余裕がある場合、v11b〜vN2bを付加的に用いて角度情報を推定してもよい。或いは、信号処理部30は、各演算サイクルで常に、v11a〜vN2aを用いた角度情報推定を行い、v11b〜vN2bを用いた角度情報推定、は複数の演算サイクルに対して1回だけ実施するようにしてもよい。
【0141】
第6の実施形態によれば、信号処理部30の能力が十分でない場合であっても、少なくとも近距離ターゲットについては確実にアジマス情報を得ることができる。よって、例えば、探知測距装置が自動車等に搭載される場合、重要度の高いターゲットを確実に探知できる。
【0142】
上述した第1〜第6の実施形態は、矛盾のない範囲で任意に組み合わせてもよい。例えば、上述の説明では、第3の実施形態(プローブ信号ごとに変調入力信号の位相や周期等が異なる方式)は、第1の実施形態の構成を敷衍した装置として示されているが、第2または第4の実施形態にも適用可能である。また、第5の実施形態(各キャリア周波数が時間に対して変化する方式)は、第1〜第4の実施形態のいずれにも適用可能である。第6の実施形態(ターゲットをグループ化する方式)も、第1〜第4の実施形態のいずれにも適用可能である。
【0143】
<第7の実施形態>
ターゲットの存在方向は、(14)式で定義される角度行列(または、アジマス行列)によって記述される。ところが、この角度行列を構成する要素φは(4)式に示されるが如く、プローブ信号のキャリア周波数((4)式では、波長で表記されている)に依存している。換言すれば、プローブ信号間でキャリア周波数の差が大きい場合、プローブ信号ごとに異なる角度行列が生成される。
【0144】
第7の実施形態はこの性質を利用して、角度推定の信頼性または整合性が算出される。ただし、プローブ信号ごとに生成される角度行列の差異が角度分解能に比べて十分大きな場合、開口合成による角度推定の精度が低下するおそれがある。したがって、第7の実施形態では、原則として開口合成は行わない。
【0145】
第7の実施形態の探知測距装置の構成は、上述の実施形態(例えば、第1の実施形態)と実質的に同じである。ただし、第7の実施形態では、プローブ信号P1のキャリア周波数ωc1とプローブ信号P2のキャリア周波数ωc2との差分δωは、フィルタリングによる信号分離を成立せしめる所定の閾値よりも大きい。また、信号処理部30の処理は、第1〜第6の実施形態とは異なっている。
【0146】
図12は、推定された角度の信頼性を算出する処理を示すフローチャートである。このフローチャートの処理は、信号処理部30により実行される。
【0147】
S1において、信号処理部30は、プローブ信号P1の反射波成分に基づいて、第1の角度推定を行う。例えば、図1に示す構成に於いて、P1の反射波成分を表わす各信号は復調回路20−1〜20−NのLPF23−1により得られる。そして、信号処理部30は、例えば、ターゲットk(k=1〜K)の存在する角度:θk1を推定するようにしてもよい。
【0148】
S2において、信号処理部30は、プローブ信号P2の反射波成分に基づいて、第2の角度推定を行う。図1に示す構成では、P2の反射波成分を表わす各信号は復調回路20−1〜20−NのLPF23−2により得られる。このとき、信号処理部30は、例えば、ターゲットk(k=1〜K)の存在する角度:θk2を推定するようにしてもよい。
【0149】
S3において、信号処理部30は、第1の角度推定の結果および第2の角度推定の結果に基づいて、角度推定の信頼性を算出する。例えば、ステップS1、S2でターゲットkの角度として、θk1およびθk2なる推定結果が得られた場合、信号処理部30は、例えば下式を利用して、ターゲット毎にθk1とθk2との間の距離:Dを計算する。
Dk=|θk1-θk2|2
距離Dは、その値が小さいほどP1、P2による推定の整合性が高い事を意味するので、信号処理部30では、例えば、各ターゲットについて得られたDkの平均または最小値を求め、この値をもって被推定角度の信頼性を評価することができる。
【0150】
このように、第7の実施形態では、周波数の異なる複数のプローブ信号を利用することにより推定された角度の信頼性を評価することができる。なお、上述の実施形態では、2つのプローブ信号を利用する構成を示したが、本発明はこれに限定されるものではない。すなわち、第7の実施形態の探知測距装置は、3以上の送信アンテナを利用して3以上のプローブ信号を送信してもよい。
【0151】
例えば、探知測距装置が3本の送信アンテナを有する場合、第1および第2のプローブ信号で開口合成を行い、第3のプローブ信号を利用して、開口合成後の角度推定の信頼性を評価してもよい。勿論、この場合、第1および第2のプローブ信号のキャリア周波数はフィルタリングで分離可能であり、且つ、開口合成が成立する程度に互いに近接していることが好ましい。
【0152】
以上記載した各実施例を含む実施形態に関し、さらに以下の付記を開示する。
(付記1)
互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、
前記M個のプローブ信号を送信するM個の送信素子と、
ターゲットからのエコー信号を受信するN個の受信素子と、
前記N個の受信素子のそれぞれに対して設けられ、前記M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、
前記N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、
を有する探知測距装置。
(付記2)
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号を分岐してM組のエコー信号を生成する分岐器と、
前記分岐器からの出力である前記M組のエコー信号と、互いに異なるキャリア周波数を持つ前記プローブ信号とを掛け合わせてM組の復調エコー信号を生成するM個のミキサと、
前記M個のミキサの出力であるM組の復調エコー信号からそれぞれ対応する周波数成分を抽出することで、前記M組のデータ信号を生成するフィルタ回路と、を有する
ことを特徴とする付記1に記載の探知測距装置。
(付記3)
前記フィルタ回路は前記M個の復調エコー信号から、それぞれの対応する周波数成分を抽出するM個のローパスフィルタを有する
ことを特徴とする付記2に記載の探知測距装置。
(付記4)
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号と、前記M個のプローブ信号の中の第1のプローブ信号とを掛け合わせることで復調エコー信号を生成する第1のミキサと、
前記第1のミキサの出力である復調エコー信号を分岐してM組の復調エコー信号を生成する分岐器と、
前記M組の復調エコー信号の中の1つから対応する周波数成分を抽出することにより前記第1のプローブ信号に対応するデータ信号を生成するローパスフィルタと、
前記M個の復調エコー信号の中の他の復調エコー信号から、それぞれ対応する周波数成分を抽出する1または複数のバンドパスフィルタと、
前記1または複数のバンドパスフィルタにより抽出される各周波数成分に、前記第1のプローブ信号と他の対応するプローブ信号との差分周波数を持つサブキャリア信号とをそれぞれ掛け合わせることで、前記第1のプローブ信号以外の1または複数のプローブ信号に対応する1または複数のデータ信号を生成する第2のミキサと、を有する
ことを特徴とする付記1に記載の探知測距装置。
(付記5)
前記信号生成回路は、
変調入力信号を生成する変調入力信号生成器と、
互いに異なる周波数で発振するM個の発振器と、を有し、
前記変調入力信号を前記M個の発振器に与えることにより、前記M個のプローブ信号を生成する
ことを特徴とする付記1に記載の探知測距装置。
(付記6)
前記変調入力信号生成器は、互いに位相、振幅、周期の少なくとも1つが異なるM個の変調入力信号を生成し、
前記M個の変調入力信号は、それぞれ対応する発振器に与えられる
ことを特徴とする付記5に記載の探知測距装置。
(付記7)
前記変調入力信号生成器は、互いに振幅、或いは周期の異なるM個の変調入力信号を生成し、
前記M個の変調入力信号は、それぞれ対応する発振器に与えられる
ことを特徴とする付記5に記載の探知測距装置。
(付記8)
前記M個の発振器により生成されるM個のプローブ信号のキャリア周波数は、それぞれ時間に対して、或いは所定のタイムスロットを単位として変化する
ことを特徴とする付記5に記載の探知測距装置。
(付記9)
前記復調回路は、各ミキサにより生成される各復調エコー信号からそれぞれ第1の周波数成分〜第Mの周波数成分を抽出することで第1のデータ信号〜第Mのデータ信号を生成し、
前記信号処理部は、前記復調回路により生成されるM×N組の第1のデータ信号に基づいて各ターゲットが存在する第1の角度を推定し、前記復調回路により生成されるM×N組の第m(m=2〜M)のデータ信号に基づいて、各ターゲットが存在する第mの角度を推定する
ことを特徴とする付記2に記載の探知測距装置。
(付記10)
互いに異なるキャリア周波数を有する第1〜第Mのプローブ信号を生成する信号生成回路と、
前記第1〜第Mのプローブ信号をそれぞれ送信する第1〜第Mの送信素子と、
ターゲットからのエコー信号を受信する複数の受信素子と、
前記複数の受信素子のそれぞれに対して設けられ、前記第1〜第Mのプローブ信号のうちの少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、更に前記復調エコー信号を周波数領域でフィルタリングして前記第1〜第Mのプローブ信号に対応する第1〜第Mのデータ信号を生成する複数の復調回路と、
前記複数の復調回路によって生成される複数の第1のデータ信号に基づいて前記各ターゲットについて第1の角度推定を行うと共に、前記複数の復調回路により生成される複数の第m(m=2〜M)のデータ信号に基づいて前記各ターゲットについて第2の角度推定を行い、前記第1の角度推定の結果および前記第mの角度推定の結果を利用して、各ターゲットについて推定された角度の信頼性を算出する信号処理部と、
を有する探知測距装置。
(付記11)
互いに異なるキャリア周波数を有するM個のプローブ信号を生成し、
M個の送信素子を利用して前記M個のプローブ信号を送信し、
N個の受信素子を利用してターゲットからのエコー信号を受信し、
各受信素子で受信される各エコー信号を、前記M個のプローブ信号の中の少なくとも1つを用いて復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成し、
M×N組のデータ信号に基づいてターゲットを探知する、
ことを特徴とする探知測距方法。
【符号の説明】
【0153】
1〜4 探知測距装置
10 信号生成回路
11 変調入力信号生成器(回路)
13−1、13−2 電圧制御発振器(RF−VCO)
20−1〜20−N 復調回路
21 分岐器
22−1、22−2 ミキサ
23−1、23−2 ローパスフィルタ(LPF)
30 信号処理部
50−1〜50−N 復調回路
51、54 ミキサ
53−1 ローパスフィルタ(LPF)
53−2 バンドパスフィルタ(BPF)
55 サブキャリア生成器
60 信号生成回路
61 変調入力信号生成回路
62−1、62−2 変調入力信号生成器
63−1 63−2 遅延素子
70 信号生成回路
80−1〜80−N 復調回路
91−1、91−2 ローパスフィルタ(LPF)
92−1、92−2 バンドパスフィルタ(BPF)
【特許請求の範囲】
【請求項1】
互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、
前記M個のプローブ信号を送信するM個の送信素子と、
ターゲットからのエコー信号を受信するN個の受信素子と、
前記N個の受信素子のそれぞれに対して設けられ、前記M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、
前記N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、
を有する探知測距装置。
【請求項2】
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号を分岐してM組のエコー信号を生成する分岐器と、
前記分岐器からの出力である前記M組のエコー信号と、互いに異なるキャリア周波数を持つ前記プローブ信号とを掛け合わせてM組の復調エコー信号を生成するM個のミキサと、
前記M個のミキサの出力であるM組の復調エコー信号からそれぞれ対応する周波数成分を抽出することで、前記M組のデータ信号を生成するフィルタ回路と、を有する
ことを特徴とする請求項1に記載の探知測距装置。
【請求項3】
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号と、前記M個のプローブ信号の中の第1のプローブ信号とを掛け合わせることで復調エコー信号を生成する第1のミキサと、
前記第1のミキサの出力である復調エコー信号を分岐してM組の復調エコー信号を生成する分岐器と、
前記M組の復調エコー信号の中の1つから対応する周波数成分を抽出することにより前記第1のプローブ信号に対応するデータ信号を生成するローパスフィルタと、
前記M個の復調エコー信号の中の他の復調エコー信号から、それぞれ対応する周波数成分を抽出する1または複数のバンドパスフィルタと、
前記1または複数のバンドパスフィルタにより抽出される各周波数成分に、前記第1のプローブ信号と他の対応するプローブ信号との差分周波数を持つサブキャリア信号とをそれぞれ掛け合わせることで、前記第1のプローブ信号以外の1または複数のプローブ信号に対応する1または複数のデータ信号を生成する第2のミキサと、を有する
ことを特徴とする請求項1に記載の探知測距装置。
【請求項4】
前記信号生成回路は、
変調入力信号を生成する変調入力信号生成器と、
互いに異なる周波数で発振するM個の発振器と、を有し、
前記変調入力信号を前記M個の発振器に与えることにより、前記M個のプローブ信号を生成する
ことを特徴とする請求項1に記載の探知測距装置。
【請求項5】
前記変調入力信号生成器は、互いに位相、振幅、周期の少なくとも1つが異なるM個の変調入力信号を生成し、
前記M個の変調入力信号は、それぞれ対応する発振器に与えられる
ことを特徴とする請求項4に記載の探知測距装置。
【請求項6】
互いに異なるキャリア周波数を有するM個のプローブ信号を生成し、
M個の送信素子を利用して前記M個のプローブ信号を送信し、
N個の受信素子を利用してターゲットからのエコー信号を受信し、
各受信素子で受信される各エコー信号を、前記M個のプローブ信号の中の少なくとも1つを用いて復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成し、
M×N組のデータ信号に基づいてターゲットを探知する、
ことを特徴とする探知測距方法。
【請求項1】
互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、
前記M個のプローブ信号を送信するM個の送信素子と、
ターゲットからのエコー信号を受信するN個の受信素子と、
前記N個の受信素子のそれぞれに対して設けられ、前記M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、
前記N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、
を有する探知測距装置。
【請求項2】
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号を分岐してM組のエコー信号を生成する分岐器と、
前記分岐器からの出力である前記M組のエコー信号と、互いに異なるキャリア周波数を持つ前記プローブ信号とを掛け合わせてM組の復調エコー信号を生成するM個のミキサと、
前記M個のミキサの出力であるM組の復調エコー信号からそれぞれ対応する周波数成分を抽出することで、前記M組のデータ信号を生成するフィルタ回路と、を有する
ことを特徴とする請求項1に記載の探知測距装置。
【請求項3】
各復調回路は、
前記各復調回路に対応する受信素子で受信されたエコー信号と、前記M個のプローブ信号の中の第1のプローブ信号とを掛け合わせることで復調エコー信号を生成する第1のミキサと、
前記第1のミキサの出力である復調エコー信号を分岐してM組の復調エコー信号を生成する分岐器と、
前記M組の復調エコー信号の中の1つから対応する周波数成分を抽出することにより前記第1のプローブ信号に対応するデータ信号を生成するローパスフィルタと、
前記M個の復調エコー信号の中の他の復調エコー信号から、それぞれ対応する周波数成分を抽出する1または複数のバンドパスフィルタと、
前記1または複数のバンドパスフィルタにより抽出される各周波数成分に、前記第1のプローブ信号と他の対応するプローブ信号との差分周波数を持つサブキャリア信号とをそれぞれ掛け合わせることで、前記第1のプローブ信号以外の1または複数のプローブ信号に対応する1または複数のデータ信号を生成する第2のミキサと、を有する
ことを特徴とする請求項1に記載の探知測距装置。
【請求項4】
前記信号生成回路は、
変調入力信号を生成する変調入力信号生成器と、
互いに異なる周波数で発振するM個の発振器と、を有し、
前記変調入力信号を前記M個の発振器に与えることにより、前記M個のプローブ信号を生成する
ことを特徴とする請求項1に記載の探知測距装置。
【請求項5】
前記変調入力信号生成器は、互いに位相、振幅、周期の少なくとも1つが異なるM個の変調入力信号を生成し、
前記M個の変調入力信号は、それぞれ対応する発振器に与えられる
ことを特徴とする請求項4に記載の探知測距装置。
【請求項6】
互いに異なるキャリア周波数を有するM個のプローブ信号を生成し、
M個の送信素子を利用して前記M個のプローブ信号を送信し、
N個の受信素子を利用してターゲットからのエコー信号を受信し、
各受信素子で受信される各エコー信号を、前記M個のプローブ信号の中の少なくとも1つを用いて復調することによって復調エコー信号を生成し、前記復調エコー信号を周波数領域でフィルタリングして前記M個のプローブ信号に対応するM組のデータ信号を生成し、
M×N組のデータ信号に基づいてターゲットを探知する、
ことを特徴とする探知測距方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−68433(P2013−68433A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205314(P2011−205314)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]