
探知装置、レーダ装置、探知方法、および探知プログラム
【課題】他の物標に囲まれている物標であっても検知することができる探知装置を提供する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、エコー信号に基づいて物標を探知する探知装置に関するものである。
【背景技術】
【0002】
従来、レーダ装置等では、エコー信号に基づいて物標を探知し、表示器に画像表示を行う処理が行われている(例えば特許文献1を参照)。従来の物標検知処理は、例えば以下のようにして行われる。
【0003】
レーダ装置は、各方位のエコー信号のレベルを自船に近い位置から遠い位置まで、距離方向に順に調べ、物標が存在すると判定する程度のレベルが連続して検知される位置を保持しておく。そして、次の方位についても物標存在すると判定された位置を保持し、1つ前の方位との連続性も判断する。方位方向の連続性が途切れた時点で物標の位置を確定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−333482号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、湾内の船舶等のように、他の物標(陸や橋等)に囲まれている物標の場合、各方位のエコー信号について、距離方向の連続性が途切れることがあるため、上述のような従来の物標検知処理では、適切に検知することができなかった。
【0006】
そこで、この発明は、他の物標に囲まれている物標であっても適切に検知することができる探知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の探知装置は、エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成手段と、方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標探知手段と、を備えている。そして、物標探知手段は、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力する。端部位置は、始端位置と終端位置(それぞれ方位方向、距離方向)からなる。つまり、物標毎に距離方向および方位方向のエコー信号の連続性を考慮し、始端位置と終端位置を確定することで、距離方向にエコー信号の連続性が途切れる場合であっても適切に物標を検知することができる。
【0008】
具体的には、物標探知手段は、物標が存在しないと判定した位置において、同一方位の近接する位置、および他の方位の近接する位置においても物標が存在しないと判定した場合、その後も物標が存在しないとして物標の終端位置を出力する。また、物標探知手段は、各方位における物標が存在しないと判定した終端の位置を仮終端位置として保持しておき、物標が存在しないと判定した位置が仮終端位置と一致した場合に終端位置を出力する。
【0009】
これにより、複雑な形状の物標であっても、各物標を的確に検知することができる。例えば、物標の終端位置らしきエコー信号が発生して、その後再び物標のエコー信号が発生する場合であっても、真の終端位置を的確に検知することができる。
【発明の効果】
【0010】
この発明の探知装置によれば、他の物標に囲まれている物標であっても的確に検知することができる。
【図面の簡単な説明】
【0011】
【図1】本実施形態のレーダ装置の構成を示すブロック図である。
【図2】物標とスイープデータの関係を示した模式図である。
【図3】物標を検知する具体的な処理を説明するための図である。
【図4】物標を検知する具体的な処理を説明するための図である。
【図5】複数の物標を検知した場合の処理を説明するための図である。
【図6】物標の終端位置を確定する処理を説明するための図である。
【図7】物標毎に終端位置を出力する例を示す図である。
【図8】3つ以上のスイープデータを用いて物標を検知する処理を説明するための図である。
【図9】物標探知部15の動作を示すフローチャートである。
【発明を実施するための形態】
【0012】
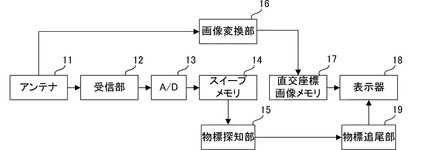
図1は、本発明の探知装置の一態様であるレーダ装置の構成を示すブロック図である。レーダ装置は、例えば船舶に設置され、自船の周囲に電磁波を送受信し、他船等の物標を探知する装置である。
【0013】
同図において、レーダ装置は、アンテナ11、受信部12、A/D変換器13、スイープメモリ14、物標探知部15、画像変換部16、直交座標画像メモリ17、表示器18、および物標追尾部19を備えている。
【0014】
アンテナ11は、自船の周囲の各方位に電磁波を送信し、エコー信号を受信する。受信部12は、アンテナ11で受信したエコー信号のレベル(エコーレベル)に応じた値をA/D変換器13に出力する。A/D変換器13は、入力されたアナログ値のエコー信号をデジタル変換し、スイープメモリ14に出力する。
【0015】
スイープメモリ14は、入力したエコー信号を極座標系の座標(方位および距離)と対応付けてスイープデータとして記憶する。アンテナ11は、所定方位毎にパルス状に電磁波を送信するため、スイープデータは、アンテナ11の各方位について、所定サンプル毎の離散値として記憶される。
【0016】
画像変換部16は、スイープメモリ14から極座標系のスイープデータを入力し、自船の位置を原点とした直交座標系に変換して、エコーレベルに応じた階調の画素輝度値として出力する。この直交座標系の画素輝度値が直交座標画像データとして直交座標画像メモリ17に記憶される。
【0017】
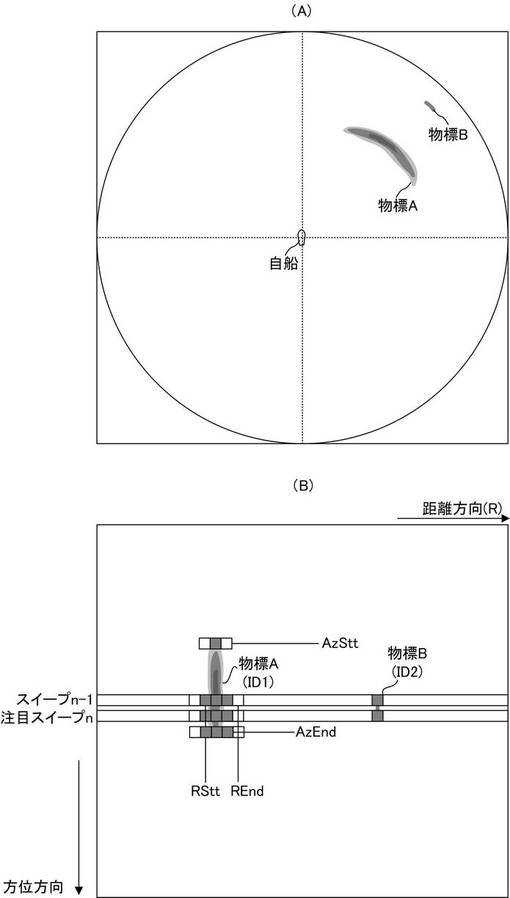
表示器18は、直交座標画像メモリ17に記憶されている直交座標画像データを読み出し、図2(A)に示すようなレーダ画像(エコー画像)を表示する。図2(A)では、自船の右前方に大きい物標Aが存在し、同じ方位で離れた位置に小さい物標Bが存在する例を示している。
【0018】
物標探知部15は、ある方位についての電磁波の送受信が終了し、スイープメモリ14における1スイープ分のスイープデータが更新される毎に、更新されたスイープデータを含む複数のスイープデータ(少なくとも直前のスイープデータ)を読み出し、物標の検知処理を行う。物標の検知結果は、物標追尾部19に出力され、例えば表示器18において物標の位置(代表点)の表示に用いられる。
【0019】
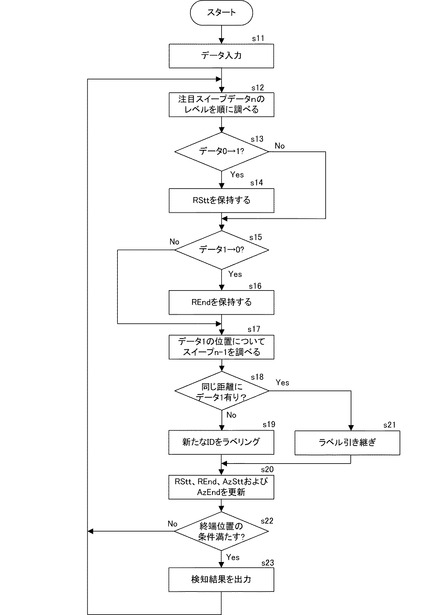
以下、物標探知部15の処理について図9のフローチャートを参照しつつ詳細に説明する。
図2(B)は、物標とスイープデータの関係を示した模式図である。図2(B)では、図2(A)に示した様なレーダ画像を表示する場合のスイープデータを示している。物標探知部15は、スイープメモリ14から最新のスイープデータn(注目スイープデータn)と、1スイープ前の隣接するスイープデータn−1を読み出す(s11)。物標探知部15は、これら2つのスイープデータに基づいて、物標の各物標の端部位置を判定する。物標の端部位置は、方位方向および距離方向の始端位置と、方位方向および距離方向の終端位置と、からなる。本実施形態では、方位方向の始端位置をAzStt、距離方向の始端位置をRStt、方位方向の終端位置をAzEnd、距離方向の終端位置をREndと称する。物標探知部15は、エコー信号に基づいて物標が存在すると判定したとき、これらの端部位置について物標毎に識別子(ID1,ID2等)を付与し、テーブルとして管理し、更新していく。これにより、物標探知部15は、エコー信号が同じ方位で距離方向で連続した後いったん連続性が途切れ、再び同じ方位でエコー信号が発生するような場合であっても、物標に個別に端部位置を出力することができるものである。
【0020】
物標探知部15は、物標の存在を判定するために、注目スイープデータnのうち、自船に最も距離が近い位置から遠い位置まで順にエコー信号のレベルを調べる(s12)。エコー信号は、物標が存在すると判定する程度のレベル(閾値)を境にして2値化されるものとする。すなわち、物標探知部15は、閾値以上となるレベルを有するサンプルデータを1とし、閾値未満のレベルを有するサンプルデータを0とする。物標探知部15は、サンプルデータが1となる位置を物標が存在するとし、サンプルデータが0となる位置を物標が存在しない位置とする。ただし、サンプルデータ0の位置はすべて物標が存在しないものとして識別される(例えば識別子ID0が付与される)が、サンプルデータ1となる場合、物標毎に異なる識別子(ID1,ID2等)が付与されるものである。
【0021】
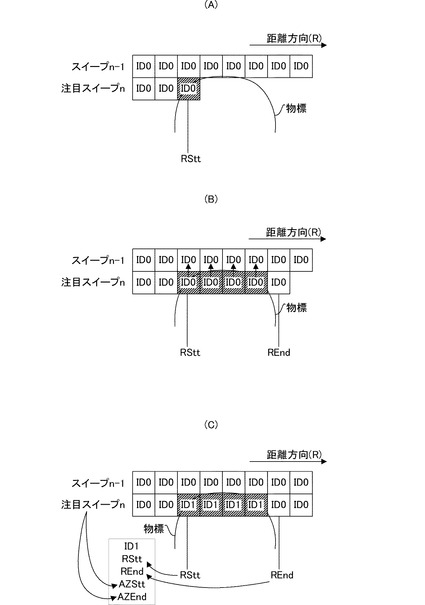
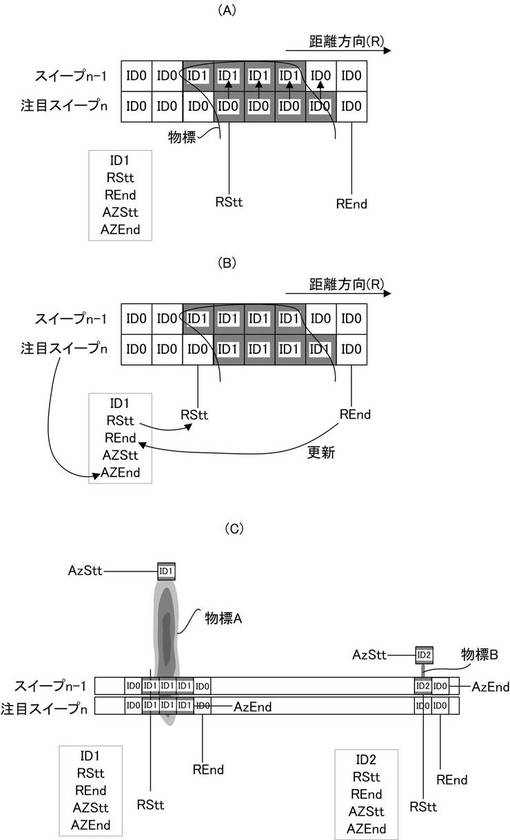
図3乃至図7は、エコー信号に基づいて物標を検知する具体的な処理を説明するための図である。まず、図3(A)に示すように、物標探知部15は、サンプルデータが0であった状況から最初に1を示すサンプルデータが入力された場合(s13)、1を示したサンプルデータの位置を距離方向の始端位置RSttとして一時保持しておく(s14)。その後、同図(B)に示すように、距離方向に続けてエコー信号を調べ、再びサンプルデータが0となるサンプルデータが入力された場合(s15)、0を示したサンプルデータの位置を距離方向の終端位置REndとして一時保持する(s16)。
【0022】
そして、物標探知部15は、同図(C)に示すように、連続してサンプルデータが1となった各位置について、スイープデータn−1の同じ距離のサンプルデータと比較する(s17)。同じ距離についてスイープデータn−1にサンプルデータ1が存在しない(すべての位置についてサンプルデータが0である)場合(s18)、新たな物標を検知したとして、新たなIDを付与する(s19)。例えば、最初に物標を検知した場合、ID1を付与する。ここで、ID1の物標は、同図(A)および同図(B)で示した処理において一時保持しておいた始端位置RSttおよび終端位置REndが距離方向の端部位置としてテーブルに記載される。また、注目スイープデータnに対応する方位が方位方向の始端位置AzSttおよび終端位置AzEndとしてテーブルに記載される(s20)。
【0023】
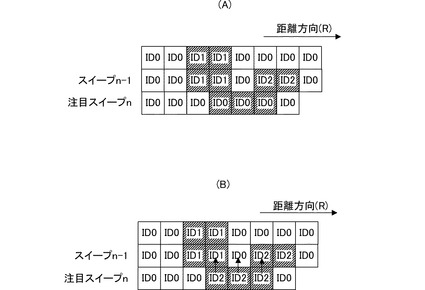
一方、物標探知部15は、図4(A)に示すように、連続してサンプルデータが1となった各位置について、スイープデータn−1の同じ距離のサンプルデータと比較した結果、スイープデータn−1にサンプルデータ1が存在した場合(s19)、スイープデータn−1で付与された識別子を引き継ぐ処理を行う(s21)。すなわち、同図(A)および同図(B)に示すように、スイープデータn−1においてID1が付与されていた場合、注目スイープデータnにおいてもID1を付与し、方位方向の始端位置AzStt、終端位置AzEnd、距離方向の始端位置RSttおよび終端位置REndを更新する(s20)。ただし、始端位置RSttについては、テーブルに記載されているRSttよりも注目スイープデータnで一時保持したRSttのほうが小さい(自船に近い)場合に更新し、終端位置REndについては、テーブルに記載されているREndよりも注目スイープデータnで一時保持したREndのほうが大きい(自船から遠い)場合に更新する。また、方位方向の始端位置AzSttは、テーブルに記載されている値を保持するものとし、終端位置AzEndを新たなスイープデータnに対応する方位に更新する。このようにして、距離方向および方位方向のエコー信号の連続性を考慮して各物標の検知処理を行う。
【0024】
物標探知部15は、同じ距離についてスイープデータn−1にサンプルデータ1が存在しない場合、新たな物標を検知したとして、新たなID(例えばID2)を付与するため、例えば図4(C)に示すように、物標Aと同じ方位で離れた位置に存在する物標Bとを異なる物標として検出することができる。物標毎に距離方向および方位方向のエコー信号の連続性を考慮し、始端位置と終端位置を確定することで、距離方向にエコー信号の連続性が途切れる場合であっても適切に物標を検知することができるものである。
【0025】
なお、図5(A)に示すように、スイープデータn−1との比較を行うときに、連続してサンプルデータが1を示すものであっても、位置によって異なるIDが付与されている場合がある。この場合、同図(B)に示すように、最後に付与したID(この例ではID2)を引き継ぐものとする。
【0026】
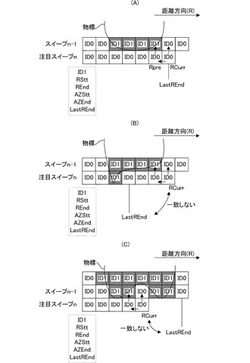
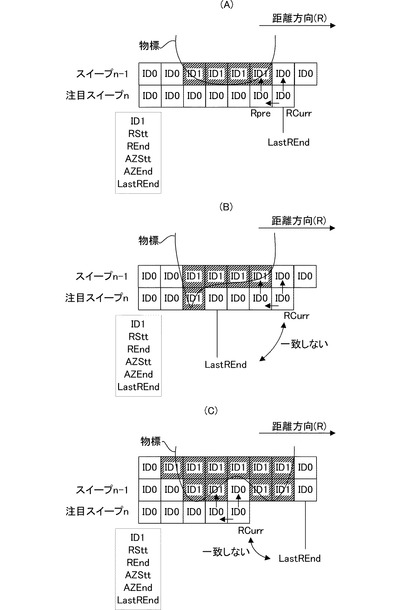
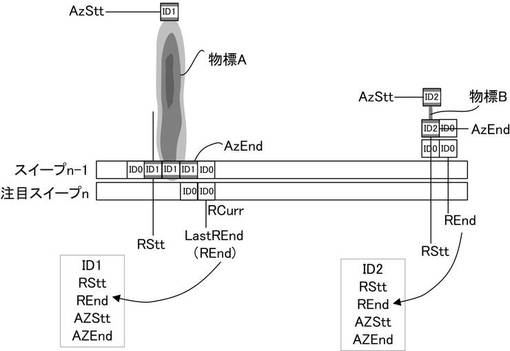
そして、物標探知部15は、図6(A)に示すような条件を満たしたときに(s22)、物標の終端位置を確定し、検知結果を物標追尾部19に出力する(s23)。すなわち、物標探知部15は、注目スイープデータnの各サンプルデータを調べる過程において、その時点で注目しているサンプルデータ(同図に示すRCurr)の値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離(自船に近い位置)におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標のAzStt、RStt、AzEnd、およびREndを検知結果として物標追尾部19に出力する。つまり、同図(A)では、スイープデータn−1において更新したAzStt、RStt、AzEnd、およびREndが出力される。
【0027】
ただし、この条件だけでは、同図(B)に示すように、注目スイープデータnの注目サンプルデータRCurrよりも自船に近い位置や、同図(C)に示すように、注目スイープデータnの注目サンプルデータRCurrよりも自船に遠い位置において、同じ物標として連続性を有するエコー信号が入力される可能性があるため、物標探知部15は、以下の条件を追加する。
【0028】
すなわち、物標探知部15は、同図(A)乃至同図(C)に示すように、各スイープデータのエコー信号を調べる過程において、最後にサンプルデータが1から0となった位置を一時的に仮終端位置LastREndとしてテーブルに記載しておく。そして、同図(A)に示すように、物標探知部15は、注目サンプルデータRCurrの位置と仮終端位置LastREndが一致した場合に、検知結果を出力する。同図(B)に示すように、注目サンプルデータRCurrよりも自船に近い位置に仮終端位置LastREndが存在する場合や、同図(C)に示すように、注目サンプルデータRCurrよりも自船に遠い位置に仮終端位置LastREndが存在する場合、検知結果は出力せず、引き続き物標検知処理を行う。
【0029】
なお、図5に示したように、複数の物標が検知されていた場合も、図6(A)に示した条件が満たされた場合に、すべての物標の検知結果が出力されるものとする。
【0030】
これにより、例えば、図7に示すように、同じ方位に異なる物標Aと物標Bが存在する状況においても、物標A、物標Bの端部位置をそれぞれ個別に出力することができる。
【0031】
以上のようにして出力された検知結果は、物標追尾部19において物標の追尾処理に用いられる。例えば、物標追尾部19は、物標の距離方向の幅RWidth=REnd−RStt、物標の方位方向の幅AzWidth=AzEnd−AzStt、物標の距離方向の中心位置R=RStt+RWidth/2、物標の方位方向の中心位置Az=AzStt+AzWidth/2、等の値を算出し、これらの大きさから補足すべき物標であるか否か(船舶であるか、陸地であるか等)を判断する。補足すべきと判定された物標は、位置の時間変化から、速度ベクトル等が算出され、補足、追尾される。物標を補足、追尾することで、例えば、レーダ装置を衝突予防装置に応用することができる。
【0032】
以上のように、本実施形態の物標検知処理では、物標の終端位置らしきエコー信号が発生して、その後再び物標のエコー信号が発生する場合であっても、連続性が途切れていた位置については物標が存在していたとして1つの物標としてマージする処理を行う必要もないため、複雑な形状の物標であっても、他の物標に囲まれている物標であっても、真の終端位置を的確に検知することができる。
【0033】
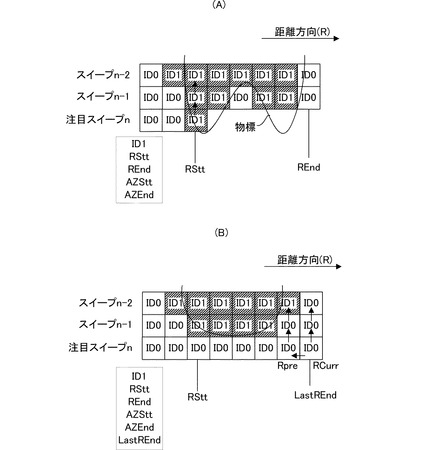
なお、以上の例では、2つのスイープデータを用いて物標検知処理を行う例を示したが、図8(A)に示すように、3つ以上のスイープデータを用いて物標検知処理を行うことも可能である。この場合、スイープデータn−1だけでなく、スイープデータn−2において付与されていたIDも調べて引き継ぐ処理を行う。スイープデータn−1およびスイープデータn−2においても物標が存在しない(ID0である)場合に新たなIDを付与する処理を行う。ただし、物標探知部15は、IDを引き継ぐ処理を行う場合において、位置によって異なるIDが付与されている場合、2つ前のスイープデータn−2よりも、1つ前のスイープデータn−1を優先的に選択する。例えば、2つ前のスイープデータn−2がID1を示し、1つ前のスイープデータn−1がID2を指名していた場合、ID2のテーブルを引き継ぐものとする。
【0034】
3つ以上のスイープデータを用いて物標検知を行う場合、物標探知部15は、例えば、同図(B)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−2のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが0であり、かつ1つ前の距離(自船に近い位置)におけるサンプルデータRpreと同じ距離のスイープデータn−2のサンプルデータが1である場合、検知結果を出力する。
【符号の説明】
【0035】
11…アンテナ
12…受信部
13…A/D変換器
14…スイープメモリ
15…物標探知部
16…画像変換部
17…直交座標画像メモリ
18…表示器
19…物標追尾部
【技術分野】
【0001】
この発明は、エコー信号に基づいて物標を探知する探知装置に関するものである。
【背景技術】
【0002】
従来、レーダ装置等では、エコー信号に基づいて物標を探知し、表示器に画像表示を行う処理が行われている(例えば特許文献1を参照)。従来の物標検知処理は、例えば以下のようにして行われる。
【0003】
レーダ装置は、各方位のエコー信号のレベルを自船に近い位置から遠い位置まで、距離方向に順に調べ、物標が存在すると判定する程度のレベルが連続して検知される位置を保持しておく。そして、次の方位についても物標存在すると判定された位置を保持し、1つ前の方位との連続性も判断する。方位方向の連続性が途切れた時点で物標の位置を確定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−333482号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、湾内の船舶等のように、他の物標(陸や橋等)に囲まれている物標の場合、各方位のエコー信号について、距離方向の連続性が途切れることがあるため、上述のような従来の物標検知処理では、適切に検知することができなかった。
【0006】
そこで、この発明は、他の物標に囲まれている物標であっても適切に検知することができる探知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の探知装置は、エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成手段と、方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標探知手段と、を備えている。そして、物標探知手段は、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力する。端部位置は、始端位置と終端位置(それぞれ方位方向、距離方向)からなる。つまり、物標毎に距離方向および方位方向のエコー信号の連続性を考慮し、始端位置と終端位置を確定することで、距離方向にエコー信号の連続性が途切れる場合であっても適切に物標を検知することができる。
【0008】
具体的には、物標探知手段は、物標が存在しないと判定した位置において、同一方位の近接する位置、および他の方位の近接する位置においても物標が存在しないと判定した場合、その後も物標が存在しないとして物標の終端位置を出力する。また、物標探知手段は、各方位における物標が存在しないと判定した終端の位置を仮終端位置として保持しておき、物標が存在しないと判定した位置が仮終端位置と一致した場合に終端位置を出力する。
【0009】
これにより、複雑な形状の物標であっても、各物標を的確に検知することができる。例えば、物標の終端位置らしきエコー信号が発生して、その後再び物標のエコー信号が発生する場合であっても、真の終端位置を的確に検知することができる。
【発明の効果】
【0010】
この発明の探知装置によれば、他の物標に囲まれている物標であっても的確に検知することができる。
【図面の簡単な説明】
【0011】
【図1】本実施形態のレーダ装置の構成を示すブロック図である。
【図2】物標とスイープデータの関係を示した模式図である。
【図3】物標を検知する具体的な処理を説明するための図である。
【図4】物標を検知する具体的な処理を説明するための図である。
【図5】複数の物標を検知した場合の処理を説明するための図である。
【図6】物標の終端位置を確定する処理を説明するための図である。
【図7】物標毎に終端位置を出力する例を示す図である。
【図8】3つ以上のスイープデータを用いて物標を検知する処理を説明するための図である。
【図9】物標探知部15の動作を示すフローチャートである。
【発明を実施するための形態】
【0012】
図1は、本発明の探知装置の一態様であるレーダ装置の構成を示すブロック図である。レーダ装置は、例えば船舶に設置され、自船の周囲に電磁波を送受信し、他船等の物標を探知する装置である。
【0013】
同図において、レーダ装置は、アンテナ11、受信部12、A/D変換器13、スイープメモリ14、物標探知部15、画像変換部16、直交座標画像メモリ17、表示器18、および物標追尾部19を備えている。
【0014】
アンテナ11は、自船の周囲の各方位に電磁波を送信し、エコー信号を受信する。受信部12は、アンテナ11で受信したエコー信号のレベル(エコーレベル)に応じた値をA/D変換器13に出力する。A/D変換器13は、入力されたアナログ値のエコー信号をデジタル変換し、スイープメモリ14に出力する。
【0015】
スイープメモリ14は、入力したエコー信号を極座標系の座標(方位および距離)と対応付けてスイープデータとして記憶する。アンテナ11は、所定方位毎にパルス状に電磁波を送信するため、スイープデータは、アンテナ11の各方位について、所定サンプル毎の離散値として記憶される。
【0016】
画像変換部16は、スイープメモリ14から極座標系のスイープデータを入力し、自船の位置を原点とした直交座標系に変換して、エコーレベルに応じた階調の画素輝度値として出力する。この直交座標系の画素輝度値が直交座標画像データとして直交座標画像メモリ17に記憶される。
【0017】
表示器18は、直交座標画像メモリ17に記憶されている直交座標画像データを読み出し、図2(A)に示すようなレーダ画像(エコー画像)を表示する。図2(A)では、自船の右前方に大きい物標Aが存在し、同じ方位で離れた位置に小さい物標Bが存在する例を示している。
【0018】
物標探知部15は、ある方位についての電磁波の送受信が終了し、スイープメモリ14における1スイープ分のスイープデータが更新される毎に、更新されたスイープデータを含む複数のスイープデータ(少なくとも直前のスイープデータ)を読み出し、物標の検知処理を行う。物標の検知結果は、物標追尾部19に出力され、例えば表示器18において物標の位置(代表点)の表示に用いられる。
【0019】
以下、物標探知部15の処理について図9のフローチャートを参照しつつ詳細に説明する。
図2(B)は、物標とスイープデータの関係を示した模式図である。図2(B)では、図2(A)に示した様なレーダ画像を表示する場合のスイープデータを示している。物標探知部15は、スイープメモリ14から最新のスイープデータn(注目スイープデータn)と、1スイープ前の隣接するスイープデータn−1を読み出す(s11)。物標探知部15は、これら2つのスイープデータに基づいて、物標の各物標の端部位置を判定する。物標の端部位置は、方位方向および距離方向の始端位置と、方位方向および距離方向の終端位置と、からなる。本実施形態では、方位方向の始端位置をAzStt、距離方向の始端位置をRStt、方位方向の終端位置をAzEnd、距離方向の終端位置をREndと称する。物標探知部15は、エコー信号に基づいて物標が存在すると判定したとき、これらの端部位置について物標毎に識別子(ID1,ID2等)を付与し、テーブルとして管理し、更新していく。これにより、物標探知部15は、エコー信号が同じ方位で距離方向で連続した後いったん連続性が途切れ、再び同じ方位でエコー信号が発生するような場合であっても、物標に個別に端部位置を出力することができるものである。
【0020】
物標探知部15は、物標の存在を判定するために、注目スイープデータnのうち、自船に最も距離が近い位置から遠い位置まで順にエコー信号のレベルを調べる(s12)。エコー信号は、物標が存在すると判定する程度のレベル(閾値)を境にして2値化されるものとする。すなわち、物標探知部15は、閾値以上となるレベルを有するサンプルデータを1とし、閾値未満のレベルを有するサンプルデータを0とする。物標探知部15は、サンプルデータが1となる位置を物標が存在するとし、サンプルデータが0となる位置を物標が存在しない位置とする。ただし、サンプルデータ0の位置はすべて物標が存在しないものとして識別される(例えば識別子ID0が付与される)が、サンプルデータ1となる場合、物標毎に異なる識別子(ID1,ID2等)が付与されるものである。
【0021】
図3乃至図7は、エコー信号に基づいて物標を検知する具体的な処理を説明するための図である。まず、図3(A)に示すように、物標探知部15は、サンプルデータが0であった状況から最初に1を示すサンプルデータが入力された場合(s13)、1を示したサンプルデータの位置を距離方向の始端位置RSttとして一時保持しておく(s14)。その後、同図(B)に示すように、距離方向に続けてエコー信号を調べ、再びサンプルデータが0となるサンプルデータが入力された場合(s15)、0を示したサンプルデータの位置を距離方向の終端位置REndとして一時保持する(s16)。
【0022】
そして、物標探知部15は、同図(C)に示すように、連続してサンプルデータが1となった各位置について、スイープデータn−1の同じ距離のサンプルデータと比較する(s17)。同じ距離についてスイープデータn−1にサンプルデータ1が存在しない(すべての位置についてサンプルデータが0である)場合(s18)、新たな物標を検知したとして、新たなIDを付与する(s19)。例えば、最初に物標を検知した場合、ID1を付与する。ここで、ID1の物標は、同図(A)および同図(B)で示した処理において一時保持しておいた始端位置RSttおよび終端位置REndが距離方向の端部位置としてテーブルに記載される。また、注目スイープデータnに対応する方位が方位方向の始端位置AzSttおよび終端位置AzEndとしてテーブルに記載される(s20)。
【0023】
一方、物標探知部15は、図4(A)に示すように、連続してサンプルデータが1となった各位置について、スイープデータn−1の同じ距離のサンプルデータと比較した結果、スイープデータn−1にサンプルデータ1が存在した場合(s19)、スイープデータn−1で付与された識別子を引き継ぐ処理を行う(s21)。すなわち、同図(A)および同図(B)に示すように、スイープデータn−1においてID1が付与されていた場合、注目スイープデータnにおいてもID1を付与し、方位方向の始端位置AzStt、終端位置AzEnd、距離方向の始端位置RSttおよび終端位置REndを更新する(s20)。ただし、始端位置RSttについては、テーブルに記載されているRSttよりも注目スイープデータnで一時保持したRSttのほうが小さい(自船に近い)場合に更新し、終端位置REndについては、テーブルに記載されているREndよりも注目スイープデータnで一時保持したREndのほうが大きい(自船から遠い)場合に更新する。また、方位方向の始端位置AzSttは、テーブルに記載されている値を保持するものとし、終端位置AzEndを新たなスイープデータnに対応する方位に更新する。このようにして、距離方向および方位方向のエコー信号の連続性を考慮して各物標の検知処理を行う。
【0024】
物標探知部15は、同じ距離についてスイープデータn−1にサンプルデータ1が存在しない場合、新たな物標を検知したとして、新たなID(例えばID2)を付与するため、例えば図4(C)に示すように、物標Aと同じ方位で離れた位置に存在する物標Bとを異なる物標として検出することができる。物標毎に距離方向および方位方向のエコー信号の連続性を考慮し、始端位置と終端位置を確定することで、距離方向にエコー信号の連続性が途切れる場合であっても適切に物標を検知することができるものである。
【0025】
なお、図5(A)に示すように、スイープデータn−1との比較を行うときに、連続してサンプルデータが1を示すものであっても、位置によって異なるIDが付与されている場合がある。この場合、同図(B)に示すように、最後に付与したID(この例ではID2)を引き継ぐものとする。
【0026】
そして、物標探知部15は、図6(A)に示すような条件を満たしたときに(s22)、物標の終端位置を確定し、検知結果を物標追尾部19に出力する(s23)。すなわち、物標探知部15は、注目スイープデータnの各サンプルデータを調べる過程において、その時点で注目しているサンプルデータ(同図に示すRCurr)の値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離(自船に近い位置)におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標のAzStt、RStt、AzEnd、およびREndを検知結果として物標追尾部19に出力する。つまり、同図(A)では、スイープデータn−1において更新したAzStt、RStt、AzEnd、およびREndが出力される。
【0027】
ただし、この条件だけでは、同図(B)に示すように、注目スイープデータnの注目サンプルデータRCurrよりも自船に近い位置や、同図(C)に示すように、注目スイープデータnの注目サンプルデータRCurrよりも自船に遠い位置において、同じ物標として連続性を有するエコー信号が入力される可能性があるため、物標探知部15は、以下の条件を追加する。
【0028】
すなわち、物標探知部15は、同図(A)乃至同図(C)に示すように、各スイープデータのエコー信号を調べる過程において、最後にサンプルデータが1から0となった位置を一時的に仮終端位置LastREndとしてテーブルに記載しておく。そして、同図(A)に示すように、物標探知部15は、注目サンプルデータRCurrの位置と仮終端位置LastREndが一致した場合に、検知結果を出力する。同図(B)に示すように、注目サンプルデータRCurrよりも自船に近い位置に仮終端位置LastREndが存在する場合や、同図(C)に示すように、注目サンプルデータRCurrよりも自船に遠い位置に仮終端位置LastREndが存在する場合、検知結果は出力せず、引き続き物標検知処理を行う。
【0029】
なお、図5に示したように、複数の物標が検知されていた場合も、図6(A)に示した条件が満たされた場合に、すべての物標の検知結果が出力されるものとする。
【0030】
これにより、例えば、図7に示すように、同じ方位に異なる物標Aと物標Bが存在する状況においても、物標A、物標Bの端部位置をそれぞれ個別に出力することができる。
【0031】
以上のようにして出力された検知結果は、物標追尾部19において物標の追尾処理に用いられる。例えば、物標追尾部19は、物標の距離方向の幅RWidth=REnd−RStt、物標の方位方向の幅AzWidth=AzEnd−AzStt、物標の距離方向の中心位置R=RStt+RWidth/2、物標の方位方向の中心位置Az=AzStt+AzWidth/2、等の値を算出し、これらの大きさから補足すべき物標であるか否か(船舶であるか、陸地であるか等)を判断する。補足すべきと判定された物標は、位置の時間変化から、速度ベクトル等が算出され、補足、追尾される。物標を補足、追尾することで、例えば、レーダ装置を衝突予防装置に応用することができる。
【0032】
以上のように、本実施形態の物標検知処理では、物標の終端位置らしきエコー信号が発生して、その後再び物標のエコー信号が発生する場合であっても、連続性が途切れていた位置については物標が存在していたとして1つの物標としてマージする処理を行う必要もないため、複雑な形状の物標であっても、他の物標に囲まれている物標であっても、真の終端位置を的確に検知することができる。
【0033】
なお、以上の例では、2つのスイープデータを用いて物標検知処理を行う例を示したが、図8(A)に示すように、3つ以上のスイープデータを用いて物標検知処理を行うことも可能である。この場合、スイープデータn−1だけでなく、スイープデータn−2において付与されていたIDも調べて引き継ぐ処理を行う。スイープデータn−1およびスイープデータn−2においても物標が存在しない(ID0である)場合に新たなIDを付与する処理を行う。ただし、物標探知部15は、IDを引き継ぐ処理を行う場合において、位置によって異なるIDが付与されている場合、2つ前のスイープデータn−2よりも、1つ前のスイープデータn−1を優先的に選択する。例えば、2つ前のスイープデータn−2がID1を示し、1つ前のスイープデータn−1がID2を指名していた場合、ID2のテーブルを引き継ぐものとする。
【0034】
3つ以上のスイープデータを用いて物標検知を行う場合、物標探知部15は、例えば、同図(B)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−2のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが0であり、かつ1つ前の距離(自船に近い位置)におけるサンプルデータRpreと同じ距離のスイープデータn−2のサンプルデータが1である場合、検知結果を出力する。
【符号の説明】
【0035】
11…アンテナ
12…受信部
13…A/D変換器
14…スイープメモリ
15…物標探知部
16…画像変換部
17…直交座標画像メモリ
18…表示器
19…物標追尾部
【特許請求の範囲】
【請求項1】
エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成手段と、
方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標探知手段と、
を備えた探知装置であって、
前記物標探知手段は、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力することを特徴とする探知装置。
【請求項2】
請求項1に記載の探知装置において、
前記物標探知手段は、物標が存在しないと判定した位置において、同一方位のうち距離が近接する位置、および他の方位のうち距離が近接する位置においても物標が存在しないと判定した場合、物標の終端位置を出力することを特徴とする探知装置。
【請求項3】
請求項2に記載の探知装置において、
前記物標探知手段は、各方位における物標が存在しないと判定した終端の位置を仮終端位置として保持し、
物標が存在しないと判定した位置が前記仮終端位置と一致した場合に当該位置を物標の終端位置を出力することを特徴とする探知装置。
【請求項4】
請求項1乃至請求項3のいずれかに記載の探知装置において、
前記物標探知手段は、物標が存在すると判定した位置において、同一方位のうち距離が近接する位置、および他の方位のうち距離が近接する位置において物標が存在しないと判定した場合、当該物標が存在すると判定した位置を物標の始端位置であると判定することを特徴とする探知装置。
【請求項5】
請求項1乃至請求項4のいずれかに記載の探知装置において、
前記物標探知手段は、物標毎に異なる識別子を付与することを特徴とする探知装置。
【請求項6】
請求項1乃至請求項5のいずれかに記載の探知装置において、
前記物標探知手段は、少なくとも隣接する2つの方位のエコー信号を比較することを特徴とする探知装置。
【請求項7】
請求項1乃至請求項6のいずれかに記載の探知装置において、
前記物標探知手段は、自装置からの距離が同じ位置のエコー信号を比較することを特徴とする探知装置。
【請求項8】
請求項1乃至請求項7のいずれかに記載の探知装置において、
入力したエコー信号を方位および距離と対応付けて記憶するスイープメモリを備え、
前記物標探知手段は、前記スイープメモリから隣接する2つの方位のエコー信号を読み出し、注目する方位のエコー信号のうち、自船に最も距離が近い位置から遠い位置まで順にエコー信号のレベルを調べ、
物標が存在すると判定した各位置について隣接する他の方位のエコー信号と比較し、同じ距離について他の方位にも物標が存在すると判定した場合に、当該注目する方位の物標と他の方位の物標とが同じ物標であると判定することを特徴とする探知装置。
【請求項9】
請求項8に記載の探知装置において、
前記物標探知手段は、注目する方位のエコー信号のうち、物標が存在しないと判定した位置について、
同じ方位で距離が隣接する位置、および他の方位で距離が同じ位置について物標が存在しないと判定し、
かつ、当該物標が存在しないと判定した位置の自船からの距離が、連続して物標が存在すると判定した位置から最初に物標が存在しないと判定した位置の自船からの距離と同じであった場合に、前記端部位置を出力することを特徴とする探知装置。
【請求項10】
請求項1乃至請求項9のいずれかに記載の探知装置と、
電磁波を前記方位毎に発射し、各物標で反射された前記エコー信号を受信して前記画像データ生成手段に入力するアンテナと、
前記画像データ生成手段が生成した前記画像データと、前記物標探知手段が判定した物標の位置に基づいて、物標の表示を行う表示手段と、
を備えたレーダ装置。
【請求項11】
エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成ステップと、
方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標検知ステップと、
を備えた探知方法であって、
前記物標検知ステップは、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力することを特徴とする探知方法。
【請求項12】
エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成ステップと、
方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標検知ステップと、
をコンピュータに実行させる探知プログラムであって、
前記物標検知ステップは、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力することを特徴とする探知プログラム。
【請求項1】
エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成手段と、
方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標探知手段と、
を備えた探知装置であって、
前記物標探知手段は、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力することを特徴とする探知装置。
【請求項2】
請求項1に記載の探知装置において、
前記物標探知手段は、物標が存在しないと判定した位置において、同一方位のうち距離が近接する位置、および他の方位のうち距離が近接する位置においても物標が存在しないと判定した場合、物標の終端位置を出力することを特徴とする探知装置。
【請求項3】
請求項2に記載の探知装置において、
前記物標探知手段は、各方位における物標が存在しないと判定した終端の位置を仮終端位置として保持し、
物標が存在しないと判定した位置が前記仮終端位置と一致した場合に当該位置を物標の終端位置を出力することを特徴とする探知装置。
【請求項4】
請求項1乃至請求項3のいずれかに記載の探知装置において、
前記物標探知手段は、物標が存在すると判定した位置において、同一方位のうち距離が近接する位置、および他の方位のうち距離が近接する位置において物標が存在しないと判定した場合、当該物標が存在すると判定した位置を物標の始端位置であると判定することを特徴とする探知装置。
【請求項5】
請求項1乃至請求項4のいずれかに記載の探知装置において、
前記物標探知手段は、物標毎に異なる識別子を付与することを特徴とする探知装置。
【請求項6】
請求項1乃至請求項5のいずれかに記載の探知装置において、
前記物標探知手段は、少なくとも隣接する2つの方位のエコー信号を比較することを特徴とする探知装置。
【請求項7】
請求項1乃至請求項6のいずれかに記載の探知装置において、
前記物標探知手段は、自装置からの距離が同じ位置のエコー信号を比較することを特徴とする探知装置。
【請求項8】
請求項1乃至請求項7のいずれかに記載の探知装置において、
入力したエコー信号を方位および距離と対応付けて記憶するスイープメモリを備え、
前記物標探知手段は、前記スイープメモリから隣接する2つの方位のエコー信号を読み出し、注目する方位のエコー信号のうち、自船に最も距離が近い位置から遠い位置まで順にエコー信号のレベルを調べ、
物標が存在すると判定した各位置について隣接する他の方位のエコー信号と比較し、同じ距離について他の方位にも物標が存在すると判定した場合に、当該注目する方位の物標と他の方位の物標とが同じ物標であると判定することを特徴とする探知装置。
【請求項9】
請求項8に記載の探知装置において、
前記物標探知手段は、注目する方位のエコー信号のうち、物標が存在しないと判定した位置について、
同じ方位で距離が隣接する位置、および他の方位で距離が同じ位置について物標が存在しないと判定し、
かつ、当該物標が存在しないと判定した位置の自船からの距離が、連続して物標が存在すると判定した位置から最初に物標が存在しないと判定した位置の自船からの距離と同じであった場合に、前記端部位置を出力することを特徴とする探知装置。
【請求項10】
請求項1乃至請求項9のいずれかに記載の探知装置と、
電磁波を前記方位毎に発射し、各物標で反射された前記エコー信号を受信して前記画像データ生成手段に入力するアンテナと、
前記画像データ生成手段が生成した前記画像データと、前記物標探知手段が判定した物標の位置に基づいて、物標の表示を行う表示手段と、
を備えたレーダ装置。
【請求項11】
エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成ステップと、
方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標検知ステップと、
を備えた探知方法であって、
前記物標検知ステップは、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力することを特徴とする探知方法。
【請求項12】
エコー信号を入力し、該エコー信号に基づいて画像データを生成する画像データ生成ステップと、
方位毎に、前記画像データの各位置の前記エコー信号のレベルに基づいて物標の存在を判定する物標検知ステップと、
をコンピュータに実行させる探知プログラムであって、
前記物標検知ステップは、物標毎に距離方向および方位方向のエコー信号の連続性を判断し、物標が存在しないと判定した位置において、近接する複数位置を含む各位置の判定結果に基づいて各物標の端部位置を出力することを特徴とする探知プログラム。
【図1】


【図3】
【図5】
【図6】
【図8】
【図9】
【図2】
【図4】
【図7】
【図3】
【図5】
【図6】
【図8】
【図9】
【図2】
【図4】
【図7】
【公開番号】特開2012−112671(P2012−112671A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−259366(P2010−259366)
【出願日】平成22年11月19日(2010.11.19)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月19日(2010.11.19)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]