
探知装置
【課題】物標の捕捉データに基づき、CFAR等の信号処理とは独立して、受信信号の信号処理強度を自動的に調整することにより、捕捉している物標を常に最適な振幅レベルで表示装置に表示させて、ユーザにとり、見やすい画面表示にする。
【解決手段】探知装置10は、信号処理部14で受信信号に対する信号処理を自動的に行う場合に、フィードバックデータ抽出処理部21からフィードバックされた、物標の捕捉状態を示す捕捉データを用いて信号処理の強度を自動的に調整する。
【解決手段】探知装置10は、信号処理部14で受信信号に対する信号処理を自動的に行う場合に、フィードバックデータ抽出処理部21からフィードバックされた、物標の捕捉状態を示す捕捉データを用いて信号処理の強度を自動的に調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アンテナを回転させながら順次異なる方向に探知信号を発射し、発射した前記探知信号に対する各方向からの受信信号を受信することにより、周囲に存在する物標を探知する探知装置に関する。
【背景技術】
【0002】
従来より、船舶用レーダ装置として船舶(自船)に搭載される探知装置は、アンテナから順次異なる方位(方向)に探知信号を発射し、前記探知信号に対する反射エコー(反射信号、受信信号)を各方位から受信し、前記各方位からの受信信号に対して所定の信号処理{例えば、干渉除去処理、STC(Sensitivity Time Control)処理、FTC(Fast Time Constant)処理}を必要に応じて行い、さらに、前記自船の周囲に存在する物標を捕捉する場合には、信号処理後の受信信号に基づいて前記物標を捕捉し、捕捉した前記物標に関する捕捉データと、前記信号処理後の受信信号の表示データとを重ね合わせて表示装置に表示させる。
【0003】
ところで、前記反射エコーには、雨等に起因したクラッタや海面反射によるシークラッタが含まれる場合があり、特許文献1には、受信信号に含まれるこれらのクラッタを抑圧するクラッタ抑圧回路(信号処理手段)としてのCell−Averaging Log CFAR(Constant False Alarm Rate)回路が提案されている。
【0004】
前記Cell−Averaging Log CFAR回路(以下、CFAR回路ともいう。)は、対数増幅器を通った受信ビデオ信号(受信信号)を遅延回路と低域フィルタとに分岐し、該低域フィルタが前記受信ビデオ信号の平均値を出力する一方で、前記遅延回路が前記受信ビデオ信号を遅延させ、さらに、前記遅延させた受信ビデオ信号から前記平均値を減算してクラッタの平均レベルを除去する。この場合、前記受信ビデオ信号に前記クラッタが含まれていれば、前記対数増幅器を通った信号の振幅は一定になるので、前記遅延させた受信ビデオ信号から前記平均値(閾値)を減算することで前記クラッタの振幅レベルを一定値に抑圧することができる。
【0005】
また、前記CFAR回路では、シークラッタからの反射強度が距離に応じて減少していくことを利用して、該距離が遠ざかるに従って単調に減少するように前記閾値を設定することで、陸地からの強い反射強度のエコーによって前記平均値が増加しないようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−227871号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述したCFAR回路では、平均値を算出するための平均化範囲の取り方が海象条件に合っていない場合には、物標を表示装置の画面上に表示する際に該物標の輝度が薄くなったり、あるいは、前記物標が小さく表示される。
【0008】
図7A〜図7Cは、前記CFAR回路での受信ビデオ信号に対する信号処理(CFAR処理)を説明するためのタイムチャートである。
【0009】
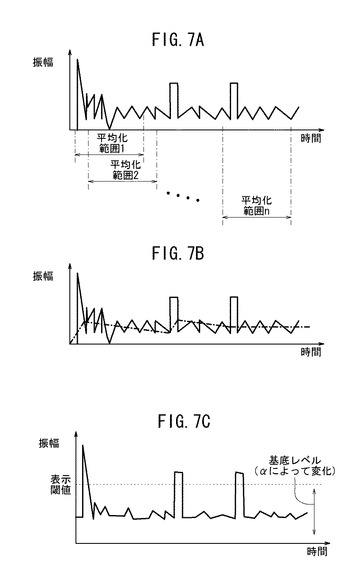
図7Aは、ある方位で受信した1送信期間(1スイープ)における受信ビデオ信号の時間変化(実線)を示すタイムチャートであり、図7Bは、該受信ビデオ信号を一定の時間幅(平均化範囲1〜n)で平均化した平均値の時間変化(一点鎖線)を示すタイムチャートであり、図7Cは、前記受信ビデオ信号から前記平均値を差し引いて得られたCFAR処理後の受信ビデオ信号を示すタイムチャートである。なお、これらの処理は、通常、別々に行われるものではなく、ある時間毎に所定の時間差で同時に行われる。
【0010】
この場合、表示装置には、図7Cに示すCFAR処理後の受信ビデオ信号のうち、所定の表示閾値よりも高い振幅レベルのデータが該表示装置の画面上に表示される。このとき、ユーザによる手動調整、あるいは、探知装置による自動調整により、CFAR処理後の受信ビデオ信号の基底レベルαを変化させて、等価的に前記表示閾値を動かすことにより、前記ユーザに対する画面表示の見やすさを調整することができる。なお、図7Cに示すCFAR処理後の受信ビデオ信号の振幅レベルは、(CFAR処理後の受信信号の振幅レベル)={(図7Aの受信ビデオ信号の振幅レベル)−(図7Bの平均値)+(基底レベルα)}である。
【0011】
しかしながら、このCFAR処理によれば、基底レベルαの値を大きくしたときには、前記表示閾値の振幅レベルにまで到達しない比較的に受信強度の弱いエコー(物標)が画面上から消えたり、あるいは、該物標が小さく表示されるおそれがある。一方、基底レベルαの値を小さくしたときには、一定値に抑圧されたクラッタが画面上に表示されて、ユーザが物標の存在を視認しにくくなる。
【0012】
また、部分的に強いクラッタが表示され、CFAR処理の強さがうまく適応できない場合に、ユーザは、前記クラッタの部分の基底レベルαの値を変更したくなるが、上記の手動調整では、基底レベルαの値を部分的に変更することができないので、前記ユーザとしては、前記表示閾値を変更することにより、前記クラッタの見え方を調整するしか手段がない。
【0013】
以上説明したように、従来の探知装置では、表示装置での画面表示の見え方ではなく、信号の抽出に力点をおいた処理を行っているので、クラッタに対して強い抑圧処理(CFAR処理)を行った場合には、前記表示装置の画面上に物標が表示されなくなるか、あるいは、該物標が小さく表示されるおそれがある。このように、従来の探知装置では、CFAR等の信号処理を行った場合でも、海象条件により表示の閾値や信号処理強度が最適な値に設定されない場合があり、この結果、表示装置において、物標を最適な状態で表示できないことがあった。
【0014】
本発明は、このような問題を解決するためになされたものであり、物標の捕捉データに基づき、CFAR等の信号処理とは独立して、受信信号の信号処理強度を自動的に調整することにより、捕捉している物標を常に最適な振幅レベルで表示装置に表示させて、ユーザにとり、見やすい画面表示になることを可能とする探知装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
本発明に係る探知装置は、
順次異なる方向に発射した探知信号に対する受信信号に基づいて、自船の周囲に存在する物標を捕捉する捕捉処理手段と、
前記受信信号に対する信号処理を自動的に行う際に、前記捕捉処理手段で捕捉した前記物標の捕捉データに基づいて、前記信号処理の強度を自動的に調整する信号処理手段と、
を有することを特徴としている。
【発明の効果】
【0016】
本発明によれば、受信信号に対する信号処理を自動的に行う場合に、物標の捕捉状態を示す捕捉データに基づいて前記信号処理の強度を自動的に調整するので、該信号処理の最適化を図ることができる。この結果、表示装置に前記物標等の映像を表示させた場合に、ユーザにとり、見やすい画面表示にすることが可能となる。また、前記捕捉データに基づいて前記信号処理の強度が自動的に調整されるので、ユーザが手動調整によりCFAR、STC、FTC等の信号処理の強度を勝手に変更しても、上述した信号処理の強度の自動調整機能により、前記表示装置の画面上での表示状態を全体的に均一に保つことができ、画面全体の見え具合を自動的に調整することが可能となる。
【図面の簡単な説明】
【0017】
【図1】本実施形態に係る探知装置のブロック図である。
【図2】図2Aは、物標の捕捉処理の一例を示す説明図であり、図2Bは、捕捉データから不要な物標を抽出する処理の一例を示す説明図である。
【図3】フィードバックデータを抽出すべき検出領域が複数ある場合の説明図である。
【図4】図4A及び図4Bは、フィードバックデータの一例を示す一覧表である。
【図5】図5A〜図5Cは、指定した距離範囲及び/又は方位範囲の一例を示す説明図である。
【図6】信号処理の強度の調整処理及び捕捉データのフィードバック処理を示すフローチャートである。
【図7】図7A〜図7Cは、CFAR処理を示すタイムチャートである。
【発明を実施するための形態】
【0018】
本発明に係る探知装置の好適な実施形態について、図1〜図6を参照しながら説明する。
【0019】
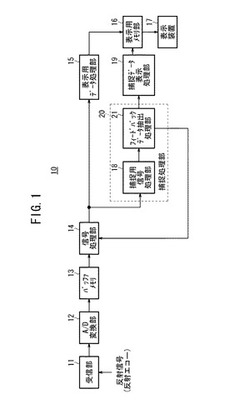
本実施形態に係る探知装置10は、船舶用レーダ装置として船舶(自船)に搭載され、該自船の周囲に存在する物標を検出、表示するためのパルスレーダ方式の探知装置であり、図1に示すように、受信部11、A/D変換部12、バッファメモリ13、信号処理部(信号処理手段)14、表示用データ処理部15、表示用メモリ部16、表示装置17、捕捉用信号処理部18とフィードバックデータ抽出処理部(フィードバック処理部)21とを有する捕捉処理部(捕捉処理手段)20、及び、捕捉データ表示処理部19を備える。
【0020】
探知装置10では、船舶上の見晴らしの良い箇所に設けられた図示しないレーダアンテナを水平面内で回転させながら順次異なる方位に探知信号(所定のパルス幅のパルス信号)を無線送信し、一方で、回転中のレーダアンテナは、前記探知信号に起因した各々の方位からの反射エコーを受信する。ある方位から前記レーダアンテナにより受信された反射エコー(反射信号、受信信号)は、受信部11で検波及び増幅され、さらに、A/D変換部12でA/D変換されて、バッファメモリ13に時系列的に一旦記憶される。
【0021】
信号処理部14は、バッファメモリ13から反射エコーのデータ(エコーデータ)を読み出して、所定の信号処理(例えば、干渉除去、STC処理、FTC処理、CFAR処理)を必要に応じて行う。なお、前記信号処理には、ユーザがつまみ等の入力手段を入力操作した際に、該入力操作の内容に応じた信号処理を信号処理部14が行う手動調整と、信号処理部14が前記信号処理を自動的に行う自動調整とがある。また、探知信号の送信から反射エコーの受信までの1回の送受信を1スイープとし、レーダアンテナの1回転を1スキャンとすれば、1スキャンの間には多数のスイープが含まれており、信号処理部14は、過去のスイープのエコーデータ(スイープデータ)と現在のスイープデータとの間でスイープ相関を行う。また、各スキャン間で行われるスキャン相関は、信号処理部14で行う場合と、表示用データ処理部15で行う場合とがあり、どの処理部でスキャン相関を行うかは、探知装置10を構成するシステムによって適宜選択される。
【0022】
信号処理部14から出力されるエコーデータは、R(距離)−θ(方位)座標系で表わされるデータであるため、表示用データ処理部15は、エコーデータをR−θ座標系からX−Y座標系に座標変換して、表示装置17の表示画面のドット数に対応した距離(R)方向のレンジの合わせ込みを行う。座標変換後のエコーデータは、表示用メモリ部16に書き込まれ、その後、固定距離目盛等のグラフィック系のデータと共に表示装置17の表示画面に表示される。
【0023】
一方、信号処理部14から出力されるエコーデータは、ARPA(Automatic Rader Plotting Aid)の捕捉機能を奏する捕捉処理部20にも供給される。捕捉処理部20の捕捉用信号処理部18は、前記エコーデータに対して、所定の捕捉用信号処理(例えば、物標判定のための2値化及びラベリング等の物標を捕捉するためのデータ抽出処理、物標認識処理、物標捕捉処理)を行うことにより、該エコーデータ中、自船の周囲に存在する物標を捕捉し、捕捉処理後の物標を捕捉データとして該捕捉用信号処理部18の図示しないメモリに記憶する。すなわち、表示装置17の表示画面のレンジと、物標の捕捉距離範囲とが一致しない場合もあり得るので、信号処理部14は、前記エコーデータを表示用データ処理部15と捕捉処理部20とに分けて供給している。従って、エコーデータに対する信号処理と、物標の捕捉処理とは、時系列に且つ独立して行われる。
【0024】
前記メモリに一旦記憶された捕捉データは、フィードバックデータ抽出処理部21を介して捕捉データ表示処理部19に読み出され、捕捉データ表示処理部19は、前記メモリに記憶された前記捕捉データに基づいて、表示装置17に表示するための表示用グラフィックデータを作成し、この表示用グラフィックデータを表示用メモリ部16に記憶させる。従って、表示装置17は、表示画面上に、エコーデータと、捕捉データに基づく表示用グラフィックデータと、マーカ類のグラフィックデータとを重ね合わせて表示する。
【0025】
捕捉処理部20のフィードバックデータ抽出処理部21は、前記表示用グラフィックデータの基となる、表示装置17の表示画面上での表示内容に近い捕捉データ中の物標のうち、探知装置10として実際に追尾すべき物標(例えば、他の船舶)と、追尾対象ではない物標(例えば、陸地、各種のクラッタやノイズ)とを区別し、追尾対象の物標の捕捉データと、追尾対象ではない物標の捕捉データとをそれぞれ抽出して信号処理部14にフィードバックする。
【0026】
ここで、フィードバックデータ抽出処理部21で行われる抽出処理について、図2A〜図3を参照しながら説明する。
【0027】
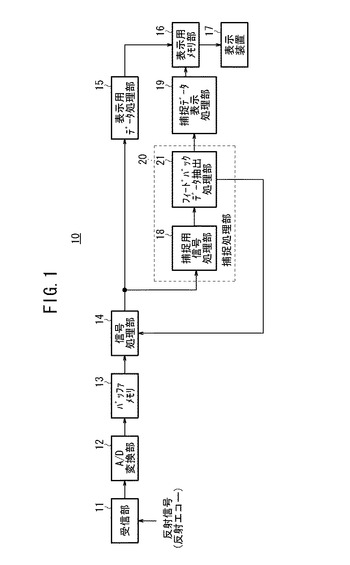
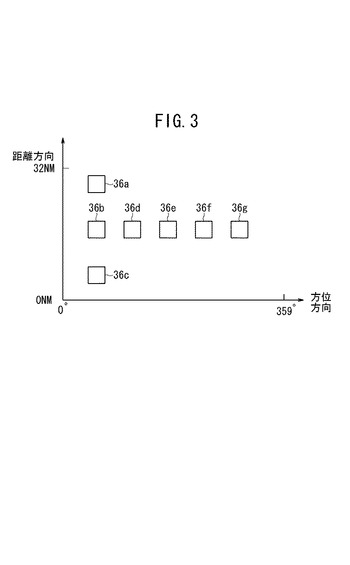
図2Aは、捕捉用信号処理部18からフィードバックデータ抽出処理部21に出力された捕捉データを示す模式的説明図であり、捕捉用信号処理部18のメモリ内部に前記捕捉データが格納されている状態を模式化したものである。また、図2Bは、フィードバックデータ抽出処理部21で抽出された物標を示す模式的説明図である。なお、図2A及び図2Bでは、横軸を方位(θ)方向とし、縦軸を距離(R)方向としている。従って、図2A及び図2B中、距離方向に沿ったマス目は、1送信(スイープ)後のサンプリングにより得られる物標のデータ記憶領域を示し、方位方向に沿ったマス目は、レーダアンテナ又は該レーダアンテナから放射されるビームを順次回転した際に得られる物標のデータ記憶領域を示す。
【0028】
捕捉用信号処理部18では、上述した捕捉用信号処理により、エコーデータ中、斜線で示した物標30、32、34を捕捉する。この場合、捕捉用信号処理部18は、物標30、32、34に対するラベリング処理を行い、ラベリングした物標の数も捕捉データの一部として前記メモリに記憶する。
【0029】
ここで、フィードバックデータ抽出処理部21は、例えば、下記の(1)又は(2)の判定基準に従って、物標30、32、34のうち、物標30を実際に追尾すべき物標とみなし、一方で、物標32、34を追尾対象ではない物標とみなし、次に、追尾対象ではない物標32、34を抽出して、抽出した物標32、34の捕捉データと、追尾すべき物標30の捕捉データとをフィードバックデータとして信号処理部14にフィードバックする。
【0030】
(1)探知装置10は、自船の周囲の他の船舶を示す物標を捕捉(追尾)するので、表示装置17の表示画面上、極端に面積の大きなものは、船舶ではなく陸地であり、一方で、極端に面積の小さなものは、クラッタ等のノイズであるとみなすことができる。従って、フィードバックデータ抽出処理部21では、図2A中、所定の面積範囲内の物標(物標30)のみを、探知装置10が実際に追尾すべき物標とみなし、一方で、前記面積範囲を外れた物標(物標32、34)を追尾対象ではない物標とみなす。
【0031】
具体的に、ある物標について、距離方向に連続するドット数(マス目の数)や方位方向に連続するドット数が所定の下限基準数以下、あるいは、所定の上限基準数以上である場合に、追尾対象ではない物標とみなす。なお、上述した面積の大きさは、探知信号の送信パルス幅、レーダアンテナの長さ等によって変化するので、フィードバックデータ抽出処理部21内には、上記(1)の判定基準を含むプログラムが予め設定されており、捕捉用信号処理部18から捕捉データが入力されたときに、フィードバックデータ抽出処理部21は、前記プログラムを起動して、上記(1)の判定処理を行えばよい。
【0032】
(2)前記(1)の処理により、ノイズではないと判断された面積を持つ物標が複数確認できた場合に、ARPA機能により予測した物標の予測位置に最も近い物標を探知装置10が追尾すべき物標とみなすか、あるいは、複数の物標が近接している場合には、これらの物標の重心を求め、求めた重心の位置を追尾すべき物標の位置とみなす。
【0033】
従って、図2A及び図2Bでは、100個のデータ記憶領域(マス目)があり、このうち3つのデータ記憶領域に記憶された物標32、34をフィードバックデータ抽出処理部21が抽出し、抽出した2つの物標32、34(3つのデータ記憶領域に記憶された3つのデータ)の捕捉データと、追尾すべき物標30の捕捉データとがフィードバックデータとして信号処理部14にフィードバックされる。
【0034】
信号処理部14は、フィードバックデータに基づいて、前記3つのデータが、ある一定値以下になるように、信号処理の強度を自動的に調整する。例えば、フィードバックデータが前記3つのデータである場合に、信号処理部14は、次回フィードバックされるデータの数が2〜10の範囲内となるように、信号処理の強度(CFAR処理における基底レベルαの値やセルアベレージ数等)を自動的に調整し、次回の信号処理においては、調整後の信号処理の強度にて、エコーデータに対する信号処理を自動的に行う。
【0035】
従って、信号処理部14では、フィードバックデータ抽出処理部21からフィードバックデータがフィードバックされる毎に、過去(前回)のフィードバックデータに含まれるデータの数と、現在(今回)のフィードバックデータに含まれるデータの数とを比較することにより、信号処理の強度を自動的に調整することも可能である。
【0036】
なお、捕捉用信号処理部18で物標を捕捉できない場合、フィードバックデータ抽出処理部21は、フィードバックデータを信号処理部14にフィードバックしない。この場合、信号処理部14は、上述した調整処理を行わず、通常の信号処理のみを行う。
【0037】
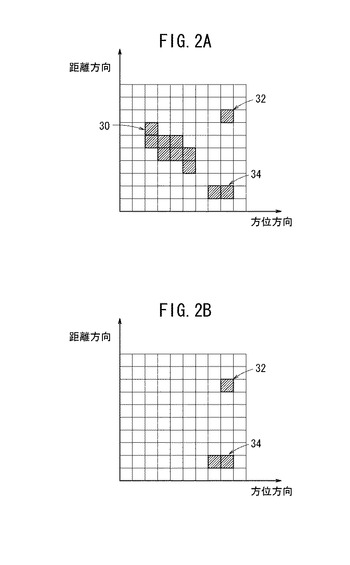
図3は、フィードバックデータを抽出するための検出領域36a〜36g、すなわち、追尾対象ではない物標(物標32、34)の含まれる領域が多数ある場合の説明図である。この場合、フィードバックデータ抽出処理部21は、前述した(1)又は(2)の処理を図3の全てのデータ記憶領域(方位方向で0°〜359°及び距離方向で0NM〜32NMの範囲)にわたって行い、全ての検出領域36a〜36gに追尾対象ではない物標が含まれることを示すフィードバックデータを、信号処理部14にフィードバックする。
【0038】
あるいは、前記全てのデータ記憶領域のうち、所定範囲のデータ記憶領域を指定して、指定した範囲内のデータ記憶領域について前記(1)又は(2)の処理を行い、該指定範囲内に追尾対象ではない物標があれば、その物標を示すフィードバックデータを信号処理部14にフィードバックしてもよい。
【0039】
この場合、フィードバックデータ抽出処理部21は、例えば、(a)所定の方位範囲、(b)所定の距離範囲、(c)全ての検出領域36a〜36g、又は、(d)全ての検出領域36a〜36gのうち所定の検出領域、を指定範囲として指定し、該指定範囲内のデータ記憶領域に対して前述した(1)又は(2)の処理を行う。
【0040】
このような指定範囲内のデータ記憶領域に対して前記(1)又は(2)の処理を行って、フィードバックデータを信号処理部14にフィードバックする場合には、前記指定範囲内の各物標のデータのレベルを前記指定範囲にわたって平滑化することが望ましい。これにより、信号処理部14において、平滑化処理後のフィードバックデータに基づいてエコーデータに対する信号処理を自動的に行う際に、該信号処理の重みが局所的に極端に変化することを抑制することができ、この結果、表示装置17の表示画面に、極端な輝度の変化がない、より自然な映像を表示することができる。例えば、CFAR処理においては、基底レベルαがある一定値以上変化しないような滑らかな信号処理が行われる。
【0041】
なお、実際に捕捉データがなく、フィードバックデータ抽出処理部21から信号処理部14にフィードバックデータがフィードバックされない場合でも、信号処理部14では、前記指定範囲に対応した監視領域を設定し、該監視領域内の不要データ数{前記(1)又は(2)の判定基準に該当するデータの数}をカウントすることで、滑らかな処理を実現することができる。
【0042】
また、上述した図3の説明において、検出領域36a〜36g等に追尾すべき物標が存在すれば、追尾対象の物標の捕捉データも、追尾対象ではない物標の捕捉データと共にフィードバックデータとして、フィードバックデータ抽出処理部21から信号処理部14にフィードバックしてもよいことは勿論である。
【0043】
捕捉処理部20の構成及び機能は、基本的には、上述した通りであるが、図4A〜図5Cに具体的に示したフィードバックデータを信号処理部14にフィードバックさせて信号処理の強度を調整することも可能である。
【0044】
捕捉処理部20では、スキャン毎に捕捉した物標の位置情報(方位、距離)、ARPA機能での予測に用いられる物標の速度やコース情報、物標の大きさに関する情報(方位方向のサイズ、距離方向のサイズ、信号レベル)等の捕捉データを前記メモリに記憶し、この捕捉データを次の新しいスキャンでの物標追尾のための位置予測や、物標の過去の位置表示に用いる。
【0045】
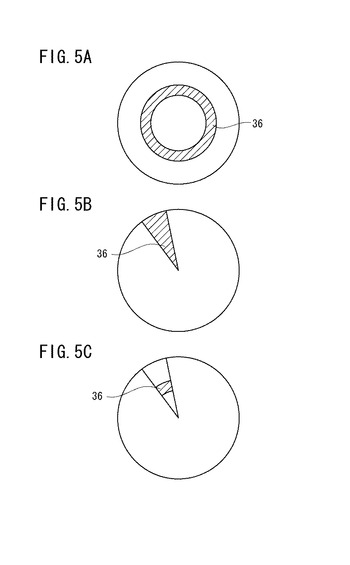
ここで、フィードバックデータには、例えば、捕捉している物標の位置データ(自船からの距離や方位)と信号処理部14での信号処理の強度とが含まれる。捕捉処理部20では、前述したように、指定範囲内のデータ記憶領域に対して信号処理の強度を設定し、設定した信号処理の強度を含むフィードバックデータを信号処理部14にフィードバックする。なお、指定範囲としては、例えば、図5Aに示すように、自船からの一定距離の検出領域36(同心円で示される範囲A)、図5Bに示すように、自船からの一定方位の検出領域36(円の一部分で示される範囲B)、あるいは、図5Cに示すように、自船からの一定距離及び一定方位の検出領域36(範囲C)がある。また、信号処理部14では、上述した領域が複数含まれるフィードバックデータがフィードバックされた場合に、これらの複数の領域間で信号処理の強度が滑らかに変化するようにスムージングを行う。
【0046】
ここで、フィードバックデータに含まれる信号処理の強度は、例えば、図2A中の物標30、32、34のドット数から決定される。
【0047】
すなわち、追尾すべき物標30のドット数が少なくなり、且つ、追尾対象ではない物標32、34のドット数も少なくなった場合には、信号処理の強度を弱くするようなフィードバックデータが設定される。この場合、フィードバックデータ抽出処理部21は、捕捉処理部20のメモリ内に記憶された、過去のスキャンで得られた物標の大きさと、今回のスキャンで得られた物標の大きさとの差分に基づいて、設定すべき信号処理の強度の大きさを決定する。
【0048】
また、物標30のドット数が多くなり、且つ、物標32、34のドット数も多くなった場合に、フィードバックデータ抽出処理部21は、信号処理の強度を強くするようなフィードバックデータを設定する。
【0049】
さらに、物標30のドット数の変化と、物標32、34のドット数の変化とが相反する場合(一方のドット数が多くなり、他方のドット数が少なくなる場合)に、フィードバックデータ抽出処理部21は、追尾すべき物標30について、過去のスキャンと今回のスキャンとの間での物標の大きさの差分を取り、得られた差分に基づいて信号処理の強度を設定する。
【0050】
このように、フィードバックデータには、信号処理の強度を設定すべきデータ記憶領域に関する情報と、信号処理部14で設定すべき信号処理の強度とが含まれる。この場合、フィードバックデータ抽出処理部21でフィードバックデータとして設定される信号処理の強度は、信号処理部14での通常の信号処理の強度に対して、例えば、該信号処理の強度を+1増やす、あるいは、−1減らすというように、信号処理部14での現在の信号処理の強度を所望の値だけ増減させるような値が設定される。また、フィードバックデータ抽出処理部21では、信号処理部14で予め規定される信号処理の強度の値に丸め込まれた値を、フィードバックデータに設定すべき信号処理の強度の値として設定する。
【0051】
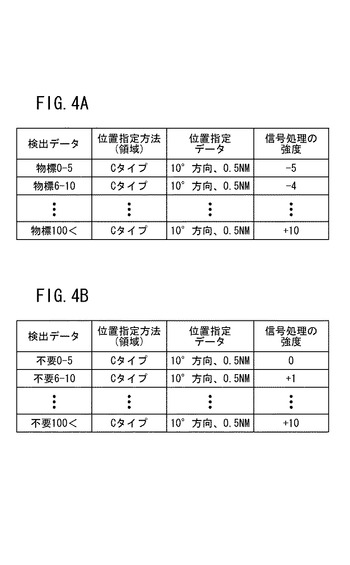
図4Aは、追尾すべき物標のドット数と、フィードバックデータとを示す一覧表である。すなわち、図4Aは、捕捉用信号処理部18が捕捉した物標が全て追尾すべき物標30であり、従って、フィードバックデータ抽出処理部21は、物標30に対応するフィードバックデータを信号処理部14にフィードバックする。
【0052】
この場合、フィードバックデータは、指定したデータ記憶領域(検出領域36)のタイプ(範囲A〜Cのいずれか)、指定した範囲に関するデータ(距離範囲及び/又は方位範囲)、及び、該指定した範囲に設定される信号処理の強度である。
【0053】
図4Aにおいて、例えば、物標のドット数が0〜5の場合には信号処理の強度が−5に設定されている。このような強度のフィードバックデータを信号処理部14にフィードバックさせると、該信号処理部14の信号処理の強度が弱くなって、物標をより表示させやすいような信号処理を行うように信号処理部14を制御することができる。また、図4Aに示すように、フィードバックデータ抽出処理部21は、物標のドット数が多くなるに従って、信号処理の強度を強くするようにフィードバックデータを設定する。
【0054】
一方、図4Bは、追尾対象ではない物標のドット数と、フィードバックデータとを示す一覧表である。すなわち、図4Bは、捕捉用信号処理部18が捕捉した物標が全て追尾対象ではない物標32、34であり、従って、フィードバックデータ抽出処理部21は、物標32、34に対応するフィードバックデータを信号処理部14にフィードバックする。
【0055】
この場合も、フィードバックデータは、指定したデータ記憶領域のタイプ(範囲A〜Cのいずれか)、指定された範囲に関するデータ(距離範囲及び/又は方位範囲)、及び、該指定した範囲に設定される信号処理の強度である。
【0056】
図4Bにおいて、例えば、フィードバックデータ抽出処理部21は、物標のドット数が0〜5の場合には信号処理の強度を0に設定し、フィードバックを行わない。また、フィードバックデータ抽出処理部21は、ドット数が6〜10のときには、信号処理の強度を1段階(+1)強く設定するフィードバックデータを信号処理部14にフィードバックする。
【0057】
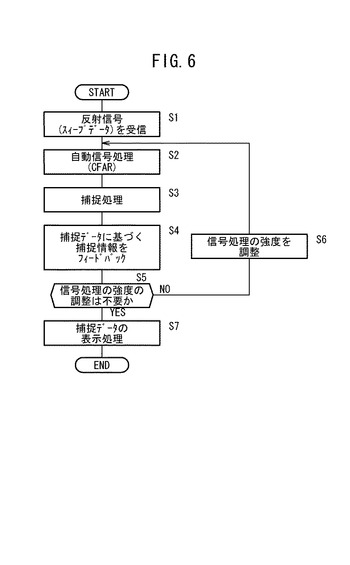
図6は、上述した信号処理部14における信号処理の強度の調整処理と、捕捉処理部20から信号処理部14に対するフィードバック処理とを示すフローチャートである。
【0058】
ステップS1において、レーダアンテナが反射エコーを受信し、受信部11が前記反射エコーの検波及び増幅を行い、増幅後の前記反射エコーがA/D変換部12でA/D変換されて、バッファメモリ13に時系列的に一旦記憶される。なお、探知装置10の動作開始時、信号処理部14では、フィードバックデータ抽出処理部21からフィードバックされるフィードバックデータの初期値を0に設定している。
【0059】
次のステップS2において、信号処理部14は、バッファメモリ13から反射エコー(エコーデータ)を読み出してCFAR処理等の信号処理を行い、信号処理後のエコーデータを表示用データ処理部15及び捕捉用信号処理部18に出力する。
【0060】
ステップS3において、捕捉用信号処理部18は、入力されたエコーデータに対して捕捉用信号処理を行い、該エコーデータ中、自船の周囲に存在する物標を捕捉し、捕捉処理後の物標を捕捉データとしてメモリに記憶する。
【0061】
ステップS4において、フィードバックデータ抽出処理部21は、前記メモリから前記捕捉データを読み出し、読み出した前記捕捉データ中、探知装置10の追尾対象ではない物標を抽出し、抽出した追尾対象ではない物標と追尾対象の物標との各捕捉データをフィードバックデータとして信号処理部14にフィードバックする。
【0062】
ステップS5において、信号処理部14は、フィードバックデータに基づいて、信号処理の強度の調整が不要か否かを判定する。具体的に、フィードバックデータに含まれるデータの数が所定範囲から外れた数である場合に、信号処理部14は、信号処理の強度を調整する必要があると判定し(ステップS5:NO)、次のステップS6において、次回フィードバックされるデータの数が前記所定範囲内に納まるように、信号処理の強度を自動的に調整し、調整後の信号処理の強度にて、ステップS2の処理を再度行う。
【0063】
なお、ステップS5において、フィードバックデータ中のデータの数が所定範囲内に納まっている場合に、信号処理部14は、信号処理の強度を調整する必要がないと判定する(ステップS5:YES)。これにより、次のステップS7において、捕捉データ表示処理部19は、信号処理部14での判定結果に基づいて、捕捉データをR−θ座標系からX−Y座標系に座標変換し、座標変換後のデータを表示用グラフィックデータとして表示用メモリ部16に記憶させる。この結果、表示装置17は、表示画面上に、エコーデータ及びマーカ類のグラフィックデータに表示用グラフィックデータを重ね合わせて表示することができる。
【0064】
以上説明したように、本実施形態に係る探知装置10によれば、受信信号に対する信号処理を自動的に行う場合に、物標の捕捉状態を示す捕捉データに基づくフィードバックデータを用いて信号処理の強度を自動的に調整するので、該信号処理の最適化を図ることができる。この結果、表示装置17に物標等の映像を表示させた場合に、ユーザにとり、見やすい画面表示にすることが可能となる。また、フィードバックデータに基づいて信号処理の強度が自動的に調整されるので、ユーザが手動調整によりCFAR、STC、FTC等の信号処理の強度を勝手に変更しても、上述した信号処理の強度の自動調整機能により、表示装置17の画面上での表示状態を全体的に均一に保つことができ、画面全体の見え具合を自動的に調整することが可能となる。
【0065】
このような探知装置10を船舶用のレーダ装置に適用することにより、安定したARPAの捕捉性能を提供すると共に、信号処理部14においてエコーデータに対する信号処理を強くかけ過ぎてしまうことを防止することが可能となり、該船舶の航海の安全性を向上することができる。
【0066】
また、信号処理部14は、前回(過去)の捕捉データのレベルと、今回(現在)の捕捉データのレベルとを比較することによって、信号処理の強度の調整を精度よく行うことが可能となる。
【0067】
さらに、フィードバックデータ抽出処理部21は、捕捉データのうち、探知装置10の追尾対象ではない物標を抽出し、抽出した物標を示す捕捉データと追尾対象の物標を示す捕捉データとに対応するフィードバックデータを信号処理部14にフィードバックするので、信号処理部14における信号処理の強度の調整を確実に行うことができる。
【0068】
本実施形態では、捕捉用信号処理部18にメモリが内蔵されている場合について説明したが、メモリが内蔵されていない場合でも、上述した各効果が容易に得られる。
【0069】
また、本実施形態では、前記(1)で説明したように、物標の面積が所定の面積範囲に含まれるか否かを判定することにより、追尾すべき物標であるか、あるいは、追尾対象ではない物標であるかを決定するが、これに代えて、ユーザが入力手段を操作して所定の物標を予め指定し、指定された物標以外の物標に対して、前記(1)又は(2)の判定処理を行ってもよい。
【0070】
さらに、本実施形態では、R−θ座標系での物標の捕捉やフィードバックデータの検出領域36、36a〜36gの設定について説明したが、これに代えて、X−Y座標系で物標の捕捉や検出領域36、36a〜36gの設定を行ってもよい。これにより、例えば、四角形状の検出領域を設定することも可能となる。
【0071】
なお、この発明は、上述の実施形態に限らず、種々の構成を採り得ることは勿論である。
【符号の説明】
【0072】
10…探知装置 11…受信部
12…A/D変換部 13…バッファメモリ
14…信号処理部 15…表示用データ処理部
16…表示用メモリ部 17…表示装置
18…捕捉用信号処理部 19…捕捉データ表示処理部
20…捕捉処理部 21…フィードバックデータ抽出処理部
30、32、34…物標 36、36a〜36g…検出領域
【技術分野】
【0001】
本発明は、アンテナを回転させながら順次異なる方向に探知信号を発射し、発射した前記探知信号に対する各方向からの受信信号を受信することにより、周囲に存在する物標を探知する探知装置に関する。
【背景技術】
【0002】
従来より、船舶用レーダ装置として船舶(自船)に搭載される探知装置は、アンテナから順次異なる方位(方向)に探知信号を発射し、前記探知信号に対する反射エコー(反射信号、受信信号)を各方位から受信し、前記各方位からの受信信号に対して所定の信号処理{例えば、干渉除去処理、STC(Sensitivity Time Control)処理、FTC(Fast Time Constant)処理}を必要に応じて行い、さらに、前記自船の周囲に存在する物標を捕捉する場合には、信号処理後の受信信号に基づいて前記物標を捕捉し、捕捉した前記物標に関する捕捉データと、前記信号処理後の受信信号の表示データとを重ね合わせて表示装置に表示させる。
【0003】
ところで、前記反射エコーには、雨等に起因したクラッタや海面反射によるシークラッタが含まれる場合があり、特許文献1には、受信信号に含まれるこれらのクラッタを抑圧するクラッタ抑圧回路(信号処理手段)としてのCell−Averaging Log CFAR(Constant False Alarm Rate)回路が提案されている。
【0004】
前記Cell−Averaging Log CFAR回路(以下、CFAR回路ともいう。)は、対数増幅器を通った受信ビデオ信号(受信信号)を遅延回路と低域フィルタとに分岐し、該低域フィルタが前記受信ビデオ信号の平均値を出力する一方で、前記遅延回路が前記受信ビデオ信号を遅延させ、さらに、前記遅延させた受信ビデオ信号から前記平均値を減算してクラッタの平均レベルを除去する。この場合、前記受信ビデオ信号に前記クラッタが含まれていれば、前記対数増幅器を通った信号の振幅は一定になるので、前記遅延させた受信ビデオ信号から前記平均値(閾値)を減算することで前記クラッタの振幅レベルを一定値に抑圧することができる。
【0005】
また、前記CFAR回路では、シークラッタからの反射強度が距離に応じて減少していくことを利用して、該距離が遠ざかるに従って単調に減少するように前記閾値を設定することで、陸地からの強い反射強度のエコーによって前記平均値が増加しないようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−227871号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述したCFAR回路では、平均値を算出するための平均化範囲の取り方が海象条件に合っていない場合には、物標を表示装置の画面上に表示する際に該物標の輝度が薄くなったり、あるいは、前記物標が小さく表示される。
【0008】
図7A〜図7Cは、前記CFAR回路での受信ビデオ信号に対する信号処理(CFAR処理)を説明するためのタイムチャートである。
【0009】
図7Aは、ある方位で受信した1送信期間(1スイープ)における受信ビデオ信号の時間変化(実線)を示すタイムチャートであり、図7Bは、該受信ビデオ信号を一定の時間幅(平均化範囲1〜n)で平均化した平均値の時間変化(一点鎖線)を示すタイムチャートであり、図7Cは、前記受信ビデオ信号から前記平均値を差し引いて得られたCFAR処理後の受信ビデオ信号を示すタイムチャートである。なお、これらの処理は、通常、別々に行われるものではなく、ある時間毎に所定の時間差で同時に行われる。
【0010】
この場合、表示装置には、図7Cに示すCFAR処理後の受信ビデオ信号のうち、所定の表示閾値よりも高い振幅レベルのデータが該表示装置の画面上に表示される。このとき、ユーザによる手動調整、あるいは、探知装置による自動調整により、CFAR処理後の受信ビデオ信号の基底レベルαを変化させて、等価的に前記表示閾値を動かすことにより、前記ユーザに対する画面表示の見やすさを調整することができる。なお、図7Cに示すCFAR処理後の受信ビデオ信号の振幅レベルは、(CFAR処理後の受信信号の振幅レベル)={(図7Aの受信ビデオ信号の振幅レベル)−(図7Bの平均値)+(基底レベルα)}である。
【0011】
しかしながら、このCFAR処理によれば、基底レベルαの値を大きくしたときには、前記表示閾値の振幅レベルにまで到達しない比較的に受信強度の弱いエコー(物標)が画面上から消えたり、あるいは、該物標が小さく表示されるおそれがある。一方、基底レベルαの値を小さくしたときには、一定値に抑圧されたクラッタが画面上に表示されて、ユーザが物標の存在を視認しにくくなる。
【0012】
また、部分的に強いクラッタが表示され、CFAR処理の強さがうまく適応できない場合に、ユーザは、前記クラッタの部分の基底レベルαの値を変更したくなるが、上記の手動調整では、基底レベルαの値を部分的に変更することができないので、前記ユーザとしては、前記表示閾値を変更することにより、前記クラッタの見え方を調整するしか手段がない。
【0013】
以上説明したように、従来の探知装置では、表示装置での画面表示の見え方ではなく、信号の抽出に力点をおいた処理を行っているので、クラッタに対して強い抑圧処理(CFAR処理)を行った場合には、前記表示装置の画面上に物標が表示されなくなるか、あるいは、該物標が小さく表示されるおそれがある。このように、従来の探知装置では、CFAR等の信号処理を行った場合でも、海象条件により表示の閾値や信号処理強度が最適な値に設定されない場合があり、この結果、表示装置において、物標を最適な状態で表示できないことがあった。
【0014】
本発明は、このような問題を解決するためになされたものであり、物標の捕捉データに基づき、CFAR等の信号処理とは独立して、受信信号の信号処理強度を自動的に調整することにより、捕捉している物標を常に最適な振幅レベルで表示装置に表示させて、ユーザにとり、見やすい画面表示になることを可能とする探知装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
本発明に係る探知装置は、
順次異なる方向に発射した探知信号に対する受信信号に基づいて、自船の周囲に存在する物標を捕捉する捕捉処理手段と、
前記受信信号に対する信号処理を自動的に行う際に、前記捕捉処理手段で捕捉した前記物標の捕捉データに基づいて、前記信号処理の強度を自動的に調整する信号処理手段と、
を有することを特徴としている。
【発明の効果】
【0016】
本発明によれば、受信信号に対する信号処理を自動的に行う場合に、物標の捕捉状態を示す捕捉データに基づいて前記信号処理の強度を自動的に調整するので、該信号処理の最適化を図ることができる。この結果、表示装置に前記物標等の映像を表示させた場合に、ユーザにとり、見やすい画面表示にすることが可能となる。また、前記捕捉データに基づいて前記信号処理の強度が自動的に調整されるので、ユーザが手動調整によりCFAR、STC、FTC等の信号処理の強度を勝手に変更しても、上述した信号処理の強度の自動調整機能により、前記表示装置の画面上での表示状態を全体的に均一に保つことができ、画面全体の見え具合を自動的に調整することが可能となる。
【図面の簡単な説明】
【0017】
【図1】本実施形態に係る探知装置のブロック図である。
【図2】図2Aは、物標の捕捉処理の一例を示す説明図であり、図2Bは、捕捉データから不要な物標を抽出する処理の一例を示す説明図である。
【図3】フィードバックデータを抽出すべき検出領域が複数ある場合の説明図である。
【図4】図4A及び図4Bは、フィードバックデータの一例を示す一覧表である。
【図5】図5A〜図5Cは、指定した距離範囲及び/又は方位範囲の一例を示す説明図である。
【図6】信号処理の強度の調整処理及び捕捉データのフィードバック処理を示すフローチャートである。
【図7】図7A〜図7Cは、CFAR処理を示すタイムチャートである。
【発明を実施するための形態】
【0018】
本発明に係る探知装置の好適な実施形態について、図1〜図6を参照しながら説明する。
【0019】
本実施形態に係る探知装置10は、船舶用レーダ装置として船舶(自船)に搭載され、該自船の周囲に存在する物標を検出、表示するためのパルスレーダ方式の探知装置であり、図1に示すように、受信部11、A/D変換部12、バッファメモリ13、信号処理部(信号処理手段)14、表示用データ処理部15、表示用メモリ部16、表示装置17、捕捉用信号処理部18とフィードバックデータ抽出処理部(フィードバック処理部)21とを有する捕捉処理部(捕捉処理手段)20、及び、捕捉データ表示処理部19を備える。
【0020】
探知装置10では、船舶上の見晴らしの良い箇所に設けられた図示しないレーダアンテナを水平面内で回転させながら順次異なる方位に探知信号(所定のパルス幅のパルス信号)を無線送信し、一方で、回転中のレーダアンテナは、前記探知信号に起因した各々の方位からの反射エコーを受信する。ある方位から前記レーダアンテナにより受信された反射エコー(反射信号、受信信号)は、受信部11で検波及び増幅され、さらに、A/D変換部12でA/D変換されて、バッファメモリ13に時系列的に一旦記憶される。
【0021】
信号処理部14は、バッファメモリ13から反射エコーのデータ(エコーデータ)を読み出して、所定の信号処理(例えば、干渉除去、STC処理、FTC処理、CFAR処理)を必要に応じて行う。なお、前記信号処理には、ユーザがつまみ等の入力手段を入力操作した際に、該入力操作の内容に応じた信号処理を信号処理部14が行う手動調整と、信号処理部14が前記信号処理を自動的に行う自動調整とがある。また、探知信号の送信から反射エコーの受信までの1回の送受信を1スイープとし、レーダアンテナの1回転を1スキャンとすれば、1スキャンの間には多数のスイープが含まれており、信号処理部14は、過去のスイープのエコーデータ(スイープデータ)と現在のスイープデータとの間でスイープ相関を行う。また、各スキャン間で行われるスキャン相関は、信号処理部14で行う場合と、表示用データ処理部15で行う場合とがあり、どの処理部でスキャン相関を行うかは、探知装置10を構成するシステムによって適宜選択される。
【0022】
信号処理部14から出力されるエコーデータは、R(距離)−θ(方位)座標系で表わされるデータであるため、表示用データ処理部15は、エコーデータをR−θ座標系からX−Y座標系に座標変換して、表示装置17の表示画面のドット数に対応した距離(R)方向のレンジの合わせ込みを行う。座標変換後のエコーデータは、表示用メモリ部16に書き込まれ、その後、固定距離目盛等のグラフィック系のデータと共に表示装置17の表示画面に表示される。
【0023】
一方、信号処理部14から出力されるエコーデータは、ARPA(Automatic Rader Plotting Aid)の捕捉機能を奏する捕捉処理部20にも供給される。捕捉処理部20の捕捉用信号処理部18は、前記エコーデータに対して、所定の捕捉用信号処理(例えば、物標判定のための2値化及びラベリング等の物標を捕捉するためのデータ抽出処理、物標認識処理、物標捕捉処理)を行うことにより、該エコーデータ中、自船の周囲に存在する物標を捕捉し、捕捉処理後の物標を捕捉データとして該捕捉用信号処理部18の図示しないメモリに記憶する。すなわち、表示装置17の表示画面のレンジと、物標の捕捉距離範囲とが一致しない場合もあり得るので、信号処理部14は、前記エコーデータを表示用データ処理部15と捕捉処理部20とに分けて供給している。従って、エコーデータに対する信号処理と、物標の捕捉処理とは、時系列に且つ独立して行われる。
【0024】
前記メモリに一旦記憶された捕捉データは、フィードバックデータ抽出処理部21を介して捕捉データ表示処理部19に読み出され、捕捉データ表示処理部19は、前記メモリに記憶された前記捕捉データに基づいて、表示装置17に表示するための表示用グラフィックデータを作成し、この表示用グラフィックデータを表示用メモリ部16に記憶させる。従って、表示装置17は、表示画面上に、エコーデータと、捕捉データに基づく表示用グラフィックデータと、マーカ類のグラフィックデータとを重ね合わせて表示する。
【0025】
捕捉処理部20のフィードバックデータ抽出処理部21は、前記表示用グラフィックデータの基となる、表示装置17の表示画面上での表示内容に近い捕捉データ中の物標のうち、探知装置10として実際に追尾すべき物標(例えば、他の船舶)と、追尾対象ではない物標(例えば、陸地、各種のクラッタやノイズ)とを区別し、追尾対象の物標の捕捉データと、追尾対象ではない物標の捕捉データとをそれぞれ抽出して信号処理部14にフィードバックする。
【0026】
ここで、フィードバックデータ抽出処理部21で行われる抽出処理について、図2A〜図3を参照しながら説明する。
【0027】
図2Aは、捕捉用信号処理部18からフィードバックデータ抽出処理部21に出力された捕捉データを示す模式的説明図であり、捕捉用信号処理部18のメモリ内部に前記捕捉データが格納されている状態を模式化したものである。また、図2Bは、フィードバックデータ抽出処理部21で抽出された物標を示す模式的説明図である。なお、図2A及び図2Bでは、横軸を方位(θ)方向とし、縦軸を距離(R)方向としている。従って、図2A及び図2B中、距離方向に沿ったマス目は、1送信(スイープ)後のサンプリングにより得られる物標のデータ記憶領域を示し、方位方向に沿ったマス目は、レーダアンテナ又は該レーダアンテナから放射されるビームを順次回転した際に得られる物標のデータ記憶領域を示す。
【0028】
捕捉用信号処理部18では、上述した捕捉用信号処理により、エコーデータ中、斜線で示した物標30、32、34を捕捉する。この場合、捕捉用信号処理部18は、物標30、32、34に対するラベリング処理を行い、ラベリングした物標の数も捕捉データの一部として前記メモリに記憶する。
【0029】
ここで、フィードバックデータ抽出処理部21は、例えば、下記の(1)又は(2)の判定基準に従って、物標30、32、34のうち、物標30を実際に追尾すべき物標とみなし、一方で、物標32、34を追尾対象ではない物標とみなし、次に、追尾対象ではない物標32、34を抽出して、抽出した物標32、34の捕捉データと、追尾すべき物標30の捕捉データとをフィードバックデータとして信号処理部14にフィードバックする。
【0030】
(1)探知装置10は、自船の周囲の他の船舶を示す物標を捕捉(追尾)するので、表示装置17の表示画面上、極端に面積の大きなものは、船舶ではなく陸地であり、一方で、極端に面積の小さなものは、クラッタ等のノイズであるとみなすことができる。従って、フィードバックデータ抽出処理部21では、図2A中、所定の面積範囲内の物標(物標30)のみを、探知装置10が実際に追尾すべき物標とみなし、一方で、前記面積範囲を外れた物標(物標32、34)を追尾対象ではない物標とみなす。
【0031】
具体的に、ある物標について、距離方向に連続するドット数(マス目の数)や方位方向に連続するドット数が所定の下限基準数以下、あるいは、所定の上限基準数以上である場合に、追尾対象ではない物標とみなす。なお、上述した面積の大きさは、探知信号の送信パルス幅、レーダアンテナの長さ等によって変化するので、フィードバックデータ抽出処理部21内には、上記(1)の判定基準を含むプログラムが予め設定されており、捕捉用信号処理部18から捕捉データが入力されたときに、フィードバックデータ抽出処理部21は、前記プログラムを起動して、上記(1)の判定処理を行えばよい。
【0032】
(2)前記(1)の処理により、ノイズではないと判断された面積を持つ物標が複数確認できた場合に、ARPA機能により予測した物標の予測位置に最も近い物標を探知装置10が追尾すべき物標とみなすか、あるいは、複数の物標が近接している場合には、これらの物標の重心を求め、求めた重心の位置を追尾すべき物標の位置とみなす。
【0033】
従って、図2A及び図2Bでは、100個のデータ記憶領域(マス目)があり、このうち3つのデータ記憶領域に記憶された物標32、34をフィードバックデータ抽出処理部21が抽出し、抽出した2つの物標32、34(3つのデータ記憶領域に記憶された3つのデータ)の捕捉データと、追尾すべき物標30の捕捉データとがフィードバックデータとして信号処理部14にフィードバックされる。
【0034】
信号処理部14は、フィードバックデータに基づいて、前記3つのデータが、ある一定値以下になるように、信号処理の強度を自動的に調整する。例えば、フィードバックデータが前記3つのデータである場合に、信号処理部14は、次回フィードバックされるデータの数が2〜10の範囲内となるように、信号処理の強度(CFAR処理における基底レベルαの値やセルアベレージ数等)を自動的に調整し、次回の信号処理においては、調整後の信号処理の強度にて、エコーデータに対する信号処理を自動的に行う。
【0035】
従って、信号処理部14では、フィードバックデータ抽出処理部21からフィードバックデータがフィードバックされる毎に、過去(前回)のフィードバックデータに含まれるデータの数と、現在(今回)のフィードバックデータに含まれるデータの数とを比較することにより、信号処理の強度を自動的に調整することも可能である。
【0036】
なお、捕捉用信号処理部18で物標を捕捉できない場合、フィードバックデータ抽出処理部21は、フィードバックデータを信号処理部14にフィードバックしない。この場合、信号処理部14は、上述した調整処理を行わず、通常の信号処理のみを行う。
【0037】
図3は、フィードバックデータを抽出するための検出領域36a〜36g、すなわち、追尾対象ではない物標(物標32、34)の含まれる領域が多数ある場合の説明図である。この場合、フィードバックデータ抽出処理部21は、前述した(1)又は(2)の処理を図3の全てのデータ記憶領域(方位方向で0°〜359°及び距離方向で0NM〜32NMの範囲)にわたって行い、全ての検出領域36a〜36gに追尾対象ではない物標が含まれることを示すフィードバックデータを、信号処理部14にフィードバックする。
【0038】
あるいは、前記全てのデータ記憶領域のうち、所定範囲のデータ記憶領域を指定して、指定した範囲内のデータ記憶領域について前記(1)又は(2)の処理を行い、該指定範囲内に追尾対象ではない物標があれば、その物標を示すフィードバックデータを信号処理部14にフィードバックしてもよい。
【0039】
この場合、フィードバックデータ抽出処理部21は、例えば、(a)所定の方位範囲、(b)所定の距離範囲、(c)全ての検出領域36a〜36g、又は、(d)全ての検出領域36a〜36gのうち所定の検出領域、を指定範囲として指定し、該指定範囲内のデータ記憶領域に対して前述した(1)又は(2)の処理を行う。
【0040】
このような指定範囲内のデータ記憶領域に対して前記(1)又は(2)の処理を行って、フィードバックデータを信号処理部14にフィードバックする場合には、前記指定範囲内の各物標のデータのレベルを前記指定範囲にわたって平滑化することが望ましい。これにより、信号処理部14において、平滑化処理後のフィードバックデータに基づいてエコーデータに対する信号処理を自動的に行う際に、該信号処理の重みが局所的に極端に変化することを抑制することができ、この結果、表示装置17の表示画面に、極端な輝度の変化がない、より自然な映像を表示することができる。例えば、CFAR処理においては、基底レベルαがある一定値以上変化しないような滑らかな信号処理が行われる。
【0041】
なお、実際に捕捉データがなく、フィードバックデータ抽出処理部21から信号処理部14にフィードバックデータがフィードバックされない場合でも、信号処理部14では、前記指定範囲に対応した監視領域を設定し、該監視領域内の不要データ数{前記(1)又は(2)の判定基準に該当するデータの数}をカウントすることで、滑らかな処理を実現することができる。
【0042】
また、上述した図3の説明において、検出領域36a〜36g等に追尾すべき物標が存在すれば、追尾対象の物標の捕捉データも、追尾対象ではない物標の捕捉データと共にフィードバックデータとして、フィードバックデータ抽出処理部21から信号処理部14にフィードバックしてもよいことは勿論である。
【0043】
捕捉処理部20の構成及び機能は、基本的には、上述した通りであるが、図4A〜図5Cに具体的に示したフィードバックデータを信号処理部14にフィードバックさせて信号処理の強度を調整することも可能である。
【0044】
捕捉処理部20では、スキャン毎に捕捉した物標の位置情報(方位、距離)、ARPA機能での予測に用いられる物標の速度やコース情報、物標の大きさに関する情報(方位方向のサイズ、距離方向のサイズ、信号レベル)等の捕捉データを前記メモリに記憶し、この捕捉データを次の新しいスキャンでの物標追尾のための位置予測や、物標の過去の位置表示に用いる。
【0045】
ここで、フィードバックデータには、例えば、捕捉している物標の位置データ(自船からの距離や方位)と信号処理部14での信号処理の強度とが含まれる。捕捉処理部20では、前述したように、指定範囲内のデータ記憶領域に対して信号処理の強度を設定し、設定した信号処理の強度を含むフィードバックデータを信号処理部14にフィードバックする。なお、指定範囲としては、例えば、図5Aに示すように、自船からの一定距離の検出領域36(同心円で示される範囲A)、図5Bに示すように、自船からの一定方位の検出領域36(円の一部分で示される範囲B)、あるいは、図5Cに示すように、自船からの一定距離及び一定方位の検出領域36(範囲C)がある。また、信号処理部14では、上述した領域が複数含まれるフィードバックデータがフィードバックされた場合に、これらの複数の領域間で信号処理の強度が滑らかに変化するようにスムージングを行う。
【0046】
ここで、フィードバックデータに含まれる信号処理の強度は、例えば、図2A中の物標30、32、34のドット数から決定される。
【0047】
すなわち、追尾すべき物標30のドット数が少なくなり、且つ、追尾対象ではない物標32、34のドット数も少なくなった場合には、信号処理の強度を弱くするようなフィードバックデータが設定される。この場合、フィードバックデータ抽出処理部21は、捕捉処理部20のメモリ内に記憶された、過去のスキャンで得られた物標の大きさと、今回のスキャンで得られた物標の大きさとの差分に基づいて、設定すべき信号処理の強度の大きさを決定する。
【0048】
また、物標30のドット数が多くなり、且つ、物標32、34のドット数も多くなった場合に、フィードバックデータ抽出処理部21は、信号処理の強度を強くするようなフィードバックデータを設定する。
【0049】
さらに、物標30のドット数の変化と、物標32、34のドット数の変化とが相反する場合(一方のドット数が多くなり、他方のドット数が少なくなる場合)に、フィードバックデータ抽出処理部21は、追尾すべき物標30について、過去のスキャンと今回のスキャンとの間での物標の大きさの差分を取り、得られた差分に基づいて信号処理の強度を設定する。
【0050】
このように、フィードバックデータには、信号処理の強度を設定すべきデータ記憶領域に関する情報と、信号処理部14で設定すべき信号処理の強度とが含まれる。この場合、フィードバックデータ抽出処理部21でフィードバックデータとして設定される信号処理の強度は、信号処理部14での通常の信号処理の強度に対して、例えば、該信号処理の強度を+1増やす、あるいは、−1減らすというように、信号処理部14での現在の信号処理の強度を所望の値だけ増減させるような値が設定される。また、フィードバックデータ抽出処理部21では、信号処理部14で予め規定される信号処理の強度の値に丸め込まれた値を、フィードバックデータに設定すべき信号処理の強度の値として設定する。
【0051】
図4Aは、追尾すべき物標のドット数と、フィードバックデータとを示す一覧表である。すなわち、図4Aは、捕捉用信号処理部18が捕捉した物標が全て追尾すべき物標30であり、従って、フィードバックデータ抽出処理部21は、物標30に対応するフィードバックデータを信号処理部14にフィードバックする。
【0052】
この場合、フィードバックデータは、指定したデータ記憶領域(検出領域36)のタイプ(範囲A〜Cのいずれか)、指定した範囲に関するデータ(距離範囲及び/又は方位範囲)、及び、該指定した範囲に設定される信号処理の強度である。
【0053】
図4Aにおいて、例えば、物標のドット数が0〜5の場合には信号処理の強度が−5に設定されている。このような強度のフィードバックデータを信号処理部14にフィードバックさせると、該信号処理部14の信号処理の強度が弱くなって、物標をより表示させやすいような信号処理を行うように信号処理部14を制御することができる。また、図4Aに示すように、フィードバックデータ抽出処理部21は、物標のドット数が多くなるに従って、信号処理の強度を強くするようにフィードバックデータを設定する。
【0054】
一方、図4Bは、追尾対象ではない物標のドット数と、フィードバックデータとを示す一覧表である。すなわち、図4Bは、捕捉用信号処理部18が捕捉した物標が全て追尾対象ではない物標32、34であり、従って、フィードバックデータ抽出処理部21は、物標32、34に対応するフィードバックデータを信号処理部14にフィードバックする。
【0055】
この場合も、フィードバックデータは、指定したデータ記憶領域のタイプ(範囲A〜Cのいずれか)、指定された範囲に関するデータ(距離範囲及び/又は方位範囲)、及び、該指定した範囲に設定される信号処理の強度である。
【0056】
図4Bにおいて、例えば、フィードバックデータ抽出処理部21は、物標のドット数が0〜5の場合には信号処理の強度を0に設定し、フィードバックを行わない。また、フィードバックデータ抽出処理部21は、ドット数が6〜10のときには、信号処理の強度を1段階(+1)強く設定するフィードバックデータを信号処理部14にフィードバックする。
【0057】
図6は、上述した信号処理部14における信号処理の強度の調整処理と、捕捉処理部20から信号処理部14に対するフィードバック処理とを示すフローチャートである。
【0058】
ステップS1において、レーダアンテナが反射エコーを受信し、受信部11が前記反射エコーの検波及び増幅を行い、増幅後の前記反射エコーがA/D変換部12でA/D変換されて、バッファメモリ13に時系列的に一旦記憶される。なお、探知装置10の動作開始時、信号処理部14では、フィードバックデータ抽出処理部21からフィードバックされるフィードバックデータの初期値を0に設定している。
【0059】
次のステップS2において、信号処理部14は、バッファメモリ13から反射エコー(エコーデータ)を読み出してCFAR処理等の信号処理を行い、信号処理後のエコーデータを表示用データ処理部15及び捕捉用信号処理部18に出力する。
【0060】
ステップS3において、捕捉用信号処理部18は、入力されたエコーデータに対して捕捉用信号処理を行い、該エコーデータ中、自船の周囲に存在する物標を捕捉し、捕捉処理後の物標を捕捉データとしてメモリに記憶する。
【0061】
ステップS4において、フィードバックデータ抽出処理部21は、前記メモリから前記捕捉データを読み出し、読み出した前記捕捉データ中、探知装置10の追尾対象ではない物標を抽出し、抽出した追尾対象ではない物標と追尾対象の物標との各捕捉データをフィードバックデータとして信号処理部14にフィードバックする。
【0062】
ステップS5において、信号処理部14は、フィードバックデータに基づいて、信号処理の強度の調整が不要か否かを判定する。具体的に、フィードバックデータに含まれるデータの数が所定範囲から外れた数である場合に、信号処理部14は、信号処理の強度を調整する必要があると判定し(ステップS5:NO)、次のステップS6において、次回フィードバックされるデータの数が前記所定範囲内に納まるように、信号処理の強度を自動的に調整し、調整後の信号処理の強度にて、ステップS2の処理を再度行う。
【0063】
なお、ステップS5において、フィードバックデータ中のデータの数が所定範囲内に納まっている場合に、信号処理部14は、信号処理の強度を調整する必要がないと判定する(ステップS5:YES)。これにより、次のステップS7において、捕捉データ表示処理部19は、信号処理部14での判定結果に基づいて、捕捉データをR−θ座標系からX−Y座標系に座標変換し、座標変換後のデータを表示用グラフィックデータとして表示用メモリ部16に記憶させる。この結果、表示装置17は、表示画面上に、エコーデータ及びマーカ類のグラフィックデータに表示用グラフィックデータを重ね合わせて表示することができる。
【0064】
以上説明したように、本実施形態に係る探知装置10によれば、受信信号に対する信号処理を自動的に行う場合に、物標の捕捉状態を示す捕捉データに基づくフィードバックデータを用いて信号処理の強度を自動的に調整するので、該信号処理の最適化を図ることができる。この結果、表示装置17に物標等の映像を表示させた場合に、ユーザにとり、見やすい画面表示にすることが可能となる。また、フィードバックデータに基づいて信号処理の強度が自動的に調整されるので、ユーザが手動調整によりCFAR、STC、FTC等の信号処理の強度を勝手に変更しても、上述した信号処理の強度の自動調整機能により、表示装置17の画面上での表示状態を全体的に均一に保つことができ、画面全体の見え具合を自動的に調整することが可能となる。
【0065】
このような探知装置10を船舶用のレーダ装置に適用することにより、安定したARPAの捕捉性能を提供すると共に、信号処理部14においてエコーデータに対する信号処理を強くかけ過ぎてしまうことを防止することが可能となり、該船舶の航海の安全性を向上することができる。
【0066】
また、信号処理部14は、前回(過去)の捕捉データのレベルと、今回(現在)の捕捉データのレベルとを比較することによって、信号処理の強度の調整を精度よく行うことが可能となる。
【0067】
さらに、フィードバックデータ抽出処理部21は、捕捉データのうち、探知装置10の追尾対象ではない物標を抽出し、抽出した物標を示す捕捉データと追尾対象の物標を示す捕捉データとに対応するフィードバックデータを信号処理部14にフィードバックするので、信号処理部14における信号処理の強度の調整を確実に行うことができる。
【0068】
本実施形態では、捕捉用信号処理部18にメモリが内蔵されている場合について説明したが、メモリが内蔵されていない場合でも、上述した各効果が容易に得られる。
【0069】
また、本実施形態では、前記(1)で説明したように、物標の面積が所定の面積範囲に含まれるか否かを判定することにより、追尾すべき物標であるか、あるいは、追尾対象ではない物標であるかを決定するが、これに代えて、ユーザが入力手段を操作して所定の物標を予め指定し、指定された物標以外の物標に対して、前記(1)又は(2)の判定処理を行ってもよい。
【0070】
さらに、本実施形態では、R−θ座標系での物標の捕捉やフィードバックデータの検出領域36、36a〜36gの設定について説明したが、これに代えて、X−Y座標系で物標の捕捉や検出領域36、36a〜36gの設定を行ってもよい。これにより、例えば、四角形状の検出領域を設定することも可能となる。
【0071】
なお、この発明は、上述の実施形態に限らず、種々の構成を採り得ることは勿論である。
【符号の説明】
【0072】
10…探知装置 11…受信部
12…A/D変換部 13…バッファメモリ
14…信号処理部 15…表示用データ処理部
16…表示用メモリ部 17…表示装置
18…捕捉用信号処理部 19…捕捉データ表示処理部
20…捕捉処理部 21…フィードバックデータ抽出処理部
30、32、34…物標 36、36a〜36g…検出領域
【特許請求の範囲】
【請求項1】
順次異なる方向に発射した探知信号に対する受信信号に基づいて、自船の周囲に存在する物標を捕捉する捕捉処理手段と、
前記受信信号に対する信号処理を自動的に行う際に、前記捕捉処理手段で捕捉した前記物標の捕捉データに基づいて、前記信号処理の強度を自動的に調整する信号処理手段と、
を有することを特徴とする探知装置。
【請求項2】
請求項1記載の装置において、
前記信号処理手段は、過去の捕捉データのレベルと、現在の捕捉データのレベルとを比較することによって、前記信号処理の強度を調整することを特徴とする探知装置。
【請求項3】
請求項1又は2記載の装置において、
前記捕捉処理手段は、前記捕捉データを前記信号処理手段にフィードバックするフィードバック処理部を備え、
前記フィードバック処理部は、
所定の方位範囲の前記捕捉データを前記信号処理手段にフィードバックするか、所定の距離範囲の前記捕捉データを前記信号処理手段にフィードバックするか、あるいは、所定の方位範囲及び距離範囲の前記捕捉データを前記信号処理手段にフィードバックすることを特徴とする探知装置。
【請求項4】
請求項3記載の装置において、
前記捕捉処理手段が複数の前記物標を捕捉した場合に、前記フィードバック処理部は、前記各物標の捕捉データを前記信号処理手段にフィードバックすることを特徴とする探知装置。
【請求項1】
順次異なる方向に発射した探知信号に対する受信信号に基づいて、自船の周囲に存在する物標を捕捉する捕捉処理手段と、
前記受信信号に対する信号処理を自動的に行う際に、前記捕捉処理手段で捕捉した前記物標の捕捉データに基づいて、前記信号処理の強度を自動的に調整する信号処理手段と、
を有することを特徴とする探知装置。
【請求項2】
請求項1記載の装置において、
前記信号処理手段は、過去の捕捉データのレベルと、現在の捕捉データのレベルとを比較することによって、前記信号処理の強度を調整することを特徴とする探知装置。
【請求項3】
請求項1又は2記載の装置において、
前記捕捉処理手段は、前記捕捉データを前記信号処理手段にフィードバックするフィードバック処理部を備え、
前記フィードバック処理部は、
所定の方位範囲の前記捕捉データを前記信号処理手段にフィードバックするか、所定の距離範囲の前記捕捉データを前記信号処理手段にフィードバックするか、あるいは、所定の方位範囲及び距離範囲の前記捕捉データを前記信号処理手段にフィードバックすることを特徴とする探知装置。
【請求項4】
請求項3記載の装置において、
前記捕捉処理手段が複数の前記物標を捕捉した場合に、前記フィードバック処理部は、前記各物標の捕捉データを前記信号処理手段にフィードバックすることを特徴とする探知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−249648(P2010−249648A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−99164(P2009−99164)
【出願日】平成21年4月15日(2009.4.15)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月15日(2009.4.15)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]