
探知距離算出方法およびこれを用いたレーダシステム
【課題】算出される探知確率の誤差を小さくでき、しかも目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる探知距離算出方法。
【解決手段】目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、算出された平均信号強度比から信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップを含む。
【解決手段】目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、算出された平均信号強度比から信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置の探知距離を算出する探知距離算出方法およびこれを用いたレーダシステムに関する。
【背景技術】
【0002】
レーダ装置の実際の探知距離を評価するためには、目標機を飛行させて、レーダ装置によって検出された検出情報を収集し、この収集した検出情報を処理することによって所定の距離における探知確率を算出し、この算出された探知確率が所定の確率を満足しているか否かを判断する必要がある。収集された検出情報の処理は、一般に、データ解析装置において実施される。
【0003】
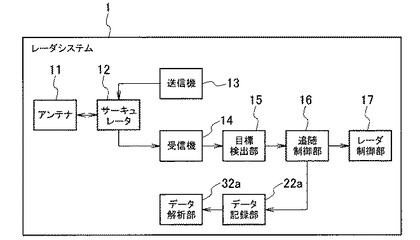
図7は、従来のデータ解析装置を含むレーダシステムの構成を示すブロック図である。このレーダシステムは、レーダ装置1、データ収集装置2およびデータ解析装置3から構成される。
【0004】
まず、レーダ装置1について説明する。レーダ装置1は、アンテナ11、サーキュレータ12、送信機13、受信機14、目標検出部15、追随制御部16、レーダ制御部17およびデータ収集装置インタフェース(I/F)部18から構成されている。
【0005】
アンテナ11は、送信機13からサーキュレータ12を経由して送られてくる送信信号を電波に変換し、送信波として指定方向の空間に送出するとともに、送信波の反射波を受信して電気信号に変換し、受信信号としてサーキュレータ12を介して受信機14に送る。受信機14は、アンテナ11からサーキュレータ12を経由して送られてくる受信信号をデジタル信号に変換し、目標検出部15に送る。
【0006】
目標検出部15は、受信機14から送られてくる受信信号に基づき目標を検出する。この目標検出部15で検出された目標を表す情報は、検出情報として追随制御部16に送られるとともに、データ収集装置インタフェース部(I/F)18を介してデータ収集装置2に送られる。追随制御部16は、目標検出部15から送られてくる検出情報を用いて追尾処理を実施する。この追随制御部16における追尾処理により得られた追尾情報は、レーダ制御部17に送られるとともに、データ収集装置インタフェース部18を介してデータ収集装置2に送られる。
【0007】
レーダ制御部17は、追随制御部16から送られてくる追尾情報に基づきレーダ装置1の各部を制御するとともに、自己の内部で発生された制御情報を、データ収集装置インタフェース部18を介してデータ収集装置2に送る。データ収集装置インタフェース部18は、上述したように、目標検出部15からの検出情報、追随制御部16からの追尾情報およびレーダ制御部17からの制御情報を、データ収集装置2に送る。
【0008】
次に、データ収集装置2について説明する。データ収集装置2は、レーダ装置インタフェース(I/F)部21、データ記録部22およびデータ解析装置インタフェース(I/F)部23から構成されている。
【0009】
レーダ装置インタフェース部21は、レーダ装置1から送られてくる検出情報、追尾情報および制御情報を受け取ってデータ記録部22に送る。データ記録部22は、レーダ装置1からレーダ装置インタフェース部21を介して送られてくる検出情報、追尾情報および制御情報を記録する。このデータ記録部22に記録された検出情報、追尾情報および制御情報は、データ解析装置インタフェース部23を介してデータ解析装置3に送られる。
【0010】
次に、データ解析装置3について説明する。データ解析装置3は、データ収集装置インタフェース(I/F)部31およびデータ解析部32から構成されている。データ収集装置インタフェース部31は、データ収集装置2から送られてくる検出情報および追尾情報を受け取ってデータ解析部32に送る。データ解析部32は、データ収集装置2からデータ収集装置インタフェース部31を介して送られてくる検出情報および追尾情報に基づき、所定の距離における探知確率を算出する。
【0011】
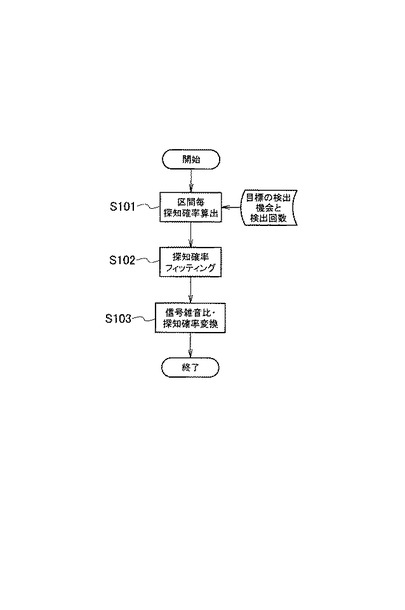
次に、上記のように構成される従来のレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図8に示すフローチャートを参照しながら説明する。
【0012】
探知距離算出処理においては、まず、区間毎の探知確率が算出される(ステップS101)。具体的には、データ解析部32は、目標機の検出機会と検出情報に含まれる目標機の検出回数から、所定の距離区間毎の探知確率を算出する。ここで、目標機の検出機会とは、目標検出部15が目標を検出するタイミングにおいて、目標機が当該距離区間に存在する可能性を言い、目標の移動速度によって決定される。また、目標機の検出回数とは、レーダ装置1が実際に目標を検出した回数を言う。
【0013】
次いで、探知確率フィッティングが行われる(ステップS102)。すなわち、データ解析部32は、所定の距離における信号対雑音比をパラメータとした理論的探知確率カーブが、ステップS101で算出された区間毎の探知確率に最も良くフィッティングする信号対雑音比を算出する。
【0014】
次いで、信号対雑音比・探知確率変換が行われる(ステップS103)。すなわち、データ解析部32は、ステップS102において算出された、最も良くフィッティングした所定の距離における信号対雑音比を、所定の距離における探知確率に変換する。さらに、探知確率が所定の値、例えば0.5になる距離に変換することもできる。
【0015】
上述した従来のレーダ装置の探知距離を算出する探知距離算出方法は、実際に飛行する目標機の諸元、特にRCS(Radar Cross Section:レーダ有効反射面積)が、探知距離の設計時の目標機のRCSと一致している場合は問題ない。
【0016】
しかしながら、小目標対処用のレーダ装置の探知距離を測定する場合、実際に小さいRCSを有する目標機を飛行させることは難しいので、通常のRCSを有する目標機を飛行させて、測定が行われる。この場合、設計上の探知距離付近から、探知確率が高くなってしまい、探知確率が大きく変化する、探知確率0.5付近のデータが得られなくなる。その結果、上述した探知確率フィッティングによって得られる信号対雑音比のばらつきが大きくなり、結果的に探知確率のばらつきが大きくなる。
【0017】
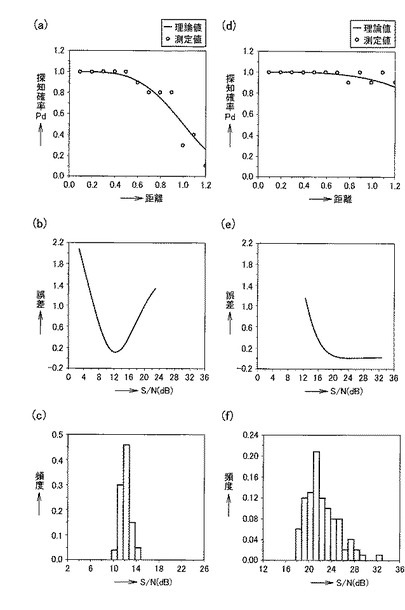
この場合のシミュレーション結果を図9に示す。図9(a)〜図9(c)は、RCSが探知距離の設計時の目標機のRCSと一致している場合(正規化距離1.0において、信号対雑音比が12.8dBの場合)を示し、図9(d)〜図9(f)は、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合(正規化距離1.0において、信号対雑音比が22.8dBの場合)を示している。
【0018】
図9(a)および図9(d)は、観測された探知確率とフィッティングカーブを示している。図9(b)および図9(e)は、正規化距離1.0における信号対雑音比に対する観測された探知確率とフィッティングカーブとの残差の二乗和の関係を示している。図9(c)および図9(f)は、(残差の二乗和が最小となる)最適信号対雑音比の100回のシミュレーションによるヒストグラムである。
【0019】
RCSが探知距離の設計時の目標機のRCSと一致している場合、図9(b)に示すように、正しい信号対雑音比(12.8dB)付近において、観測された探知確率とフィッティングカーブとの残差の二乗和が最小となる最適信号対雑音比が求められる。図9(c)に示す最適信号対雑音比のヒストグラムからも、最適信号対雑音比のばらつきが小さいことがわかる。
【0020】
一方、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合、図9(d)に示すように、設計上の探知距離付近から探知確率が高くなるため、探知確率が大きく変化する探知確率0.5付近のデータが得られなくなり、図9(e)に示すように、20〜30dB付近において、観測された探知確率とフィッティングカーブとの残差の二乗和が略一定となっている。この結果、図9(f)に示す最適信号対雑音比のヒストグラムでも、最適信号対雑音比のばらつきが大きくなっている。
【0021】
なお、探知距離算出方法に関連する技術として、特許文献1は、気象現象を観測するレーダ装置において、観測時の気象条件に応じて、レーダ観測諸元の最適化を効率よく行うレーダ装置を開示している。このレーダ装置は、気象現象を観測するレーダ装置において、観測時の気象条件に応じて気象モデルの設定を行う気象モデル設定手段と、設定された気象モデルから大気および粒子による電波の減衰率を求める減衰率計算手段と、この算出された大気および粒子による電波の減衰率を用いて探知距離を算出する探知距離評価手段と、この算出された探知距離からレーダ観測諸元を決定するレーダ観測諸元決定手段とを備えている。
【特許文献1】特開平10−227853号公報
【発明の開示】
【発明が解決しようとする課題】
【0022】
上述したように、従来のレーダ装置の探知距離の算出は、上述した方法で行われているので、実際に飛行する目標機のRCSが、探知距離の設計時の目標機のRCSよりも大きい場合、算出される探知確率の誤差が大きくなるという問題がある。
【0023】
また、実際に飛行する目標機のRCSが、探知距離の設計時の目標機のRCSと同等である場合であっても、所定の距離における探知確率の信頼性は、データ数に比例するため、探知確率の信頼性を上げようとすれば、目標機の飛行回数を増加する必要があるという問題がある。
【0024】
本発明は、上述した問題を解決するためになされたもので、その課題は、実際に飛行する目標機のRCSが探知距離の設計時の目標機のRCSよりも大きい場合であっても、算出される探知確率の誤差を小さくでき、しかも目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる探知距離算出方法およびこれを用いたレーダシステムを提供することにある。
【課題を解決するための手段】
【0025】
上記課題を解決するために、請求項1記載の発明は、目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、算出された平均信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップを含むことを特徴とする。
【0026】
請求項2記載の発明は、請求項1記載の発明において、距離の4乗による正規化関数およびクラッタを考慮した雑音と距離の関係に基づいた正規化関数を含む複数の正規化関数の中から1つの正規化関数を選択する正規化関数選択ステップを含み、信号対雑音比正規化ステップは、正規化関数選択ステップで選択された関数を用いて、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化することを特徴とする。
【0027】
請求項3記載の発明は、目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、目標の検出機会と目標の検出回数とから距離区間毎の探知確率を算出する区間毎探知確率算出ステップと、算出された距離区間毎の探知確率が高い距離区間のデータを抽出する高探知確率区間抽出ステップと、検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップを含むことを特徴とする。
【0028】
請求項4記載の発明は、請求項3記載の発明において、高探知確率区間抽出ステップでは、探知確率が0.9以上である場合に、探知確率が高い判断されることを特徴とする。
【0029】
請求項5記載の発明は、目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップとを含むことを特徴とする。
【0030】
請求項6記載の発明は、目標を検出して探知距離を算出するレーダシステムであって、目標を検出する目標検出部と、目標検出部で検出された目標を表す目標情報に基づき追随制御を行う追随制御部と、追随制御部からの追尾情報に基づき探知距離を算出するデータ解析部とを備え、データ解析部は、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出し、算出された平均信号強度比を信号対雑音比に変換し、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化し、正規化された信号対雑音比を探知確率に変換することを特徴とする。
【発明の効果】
【0031】
本発明に係る探知距離算出方法およびこれを用いたレーダシステムによれば、実際に飛行する目標機のRCSが、探知距離の設計時の目標機のRCSよりも大きな場合にも、算出される探知確率の誤差が大きくならず、また、目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明の実施の形態の図面を参照しながら詳細に説明する。なお、以下においては、従来の技術の欄で説明した構成部分に相当する部分には、従来の技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例1】
【0033】
本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0034】
本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図1に示すフローチャートを参照しながら説明する。
【0035】
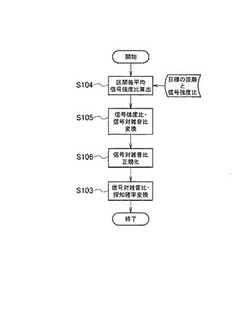
探知距離算出処理においては、まず、区間毎平均信号強度比算出が行われる(ステップS104)。すなわち、データ解析部32は、目標機の距離と信号強度比とから、所定の距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する。ここで、信号強度比は、雑音Nに対する信号Sと雑音Nとの和の割合である。次いで、信号強度比・信号対雑音比変換が行われる(ステップS105)。すなわち、データ解析部32は、ステップS104で算出された平均信号強度比を用いて、信号強度比を信号対雑音比に変換する。
【0036】
一般に、レーダ装置1において検出された信号強度比は、あらかじめ設定された閾値よりも大きな信号強度比を持つもののみであり、検出されていない部分の信号強度比を知ることはできない。このため、検出された信号強度比の平均値は、本来の信号強度比の平均値よりも大きな値になる。また、検出されなかった信号強度比をある値、例えば0に置き換えた場合も、本来の信号強度比とは一致しない。
【0037】
このため、ステップS105の信号強度比・信号対雑音比変換では、以下の関係式に基づいて変換が行われる。目標がスワーリング1、雑音がレイリー分布に従うとすると、二乗検波した目標の確率密度関数は、以下の式で表される。
【数1】

【0038】
ここで、xは、目標の振幅
F(x)は、目標の振幅がxとなる確率
Sは、目標の平均値
Nは、雑音の平均値
閾値Tを用いて、目標の検出を行う場合、目標の検出確率Pdは、以下の式で表される。
【数2】
【0039】
この結果、検出された目標の振幅の平均値
は、以下の式で表される。
【数3】
【0040】
さらに、閾値係数をk1とし、T=k1・Nとすると、検出された目標の振幅の平均値
は、以下の式で表される。
【数4】
【0041】
最終的には、信号対雑音比S/Nは、検出された平均信号強度比
から以下の式で算出される。
【数5】
【0042】
以上の信号強度比・信号対雑音比変換が終了すると、次いで、信号対雑音比正規化が行われる(ステップS106)。すなわち、データ解析部32は、各距離Riの各信号対雑音比(S/N)iを、所定の距離R’における信号対雑音比(S/N)’iに正規化(変換)する。信号対雑音比の正規化は、以下の式で表される。
【数6】
【0043】
次いで、信号対雑音比・探知確率変換が行われる(ステップS103)。すなわち、データ解析部32は、ステップS106における信号対雑音比正規化によって算出された、正規化された信号対雑音比を、所定の距離における探知確率に変換する。信号対雑音比・探知確率変換は、以下の式で表される。
【数7】
【0044】
さらに、探知確率が所定の値、例えば0.5になる距離に変換することもできる。
【0045】
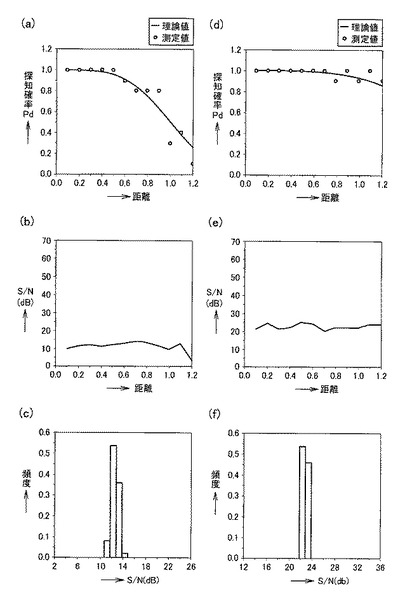
上述した算出方法による信号対雑音比のシミュレーション結果を図2に示す。図2(a)〜図2(c)は、RCSが探知距離の設計時の目標機のRCSと一致している場合(正規化距離1.0において、信号対雑音比が12.8dBの場合)を示し、図2(d)〜図2(f)は、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合(正規化距離1.0において、信号対雑音比が22.8dBの場合)を示している。
【0046】
図2(a)および図2(d)は、観測された平均信号強度比
と正規化距離との関係を示している。図2(b)および図2(e)は、正規化された信号対雑音比S/Nと正規化距離の関係を示している。図2(c)および図2(f)は、(残差の二乗和が最小となる)最適信号対雑音比の100回のシミュレーションによるヒストグラムである。
【0047】
図2(c)および図2(f)のヒストグラムから、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合も、RCSが探知距離の設計時の目標機のRCSと一致している場合と同様に、最適信号対雑音比のばらつきが小さいことがわかる。すなわち、従来の探知距離算出方法では、図9に示すように、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合、最適信号対雑音比のばらつきが大きくなっていたが、本発明の実施例1に係る探知距離算出方法によれば、これが改善されている。
【実施例2】
【0048】
本発明の実施例2に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0049】
本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図3に示すフローチャートを参照しながら説明する。
【0050】
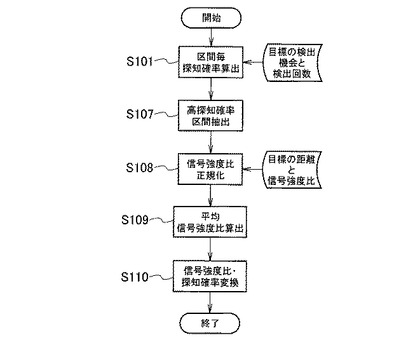
探知距離算出処理においては、まず、区間毎の探知確率算出が行われる(ステップS101)。具体的には、データ解析部32は、目標機の検出機会と目標機の検出回数とから、所定の距離区間毎の探知確率を算出する。次いで、高探知確率区間抽出が行われる(ステップS107)。すなわち、データ解析部32は、ステップS101の区間毎探知確率算出により得られた探知確率が、閾値以上の範囲を抽出する。この場合、高探知確率と判断する閾値を0.9とすることができる。
【0051】
下式のように、探知確率Pdが1に近ければ、信号強度比x/Nの期待値は、(S+N)/Nに近似できる。
【数8】
【0052】
また、下式のように、信号Sが雑音Nよりも非常に大きければ、(S+N)/Nは、信号対雑音比S/Nに近似できる。
【数9】
【0053】
さらに、探知確率Pdが高い場合は、S>>Nの条件も成立するため、下式が導かれる。
【数10】
【0054】
このため、探知確率Pdが高ければ、平均信号強度比
を信号対雑音比S/Nのかわりに用いることができる。
【0055】
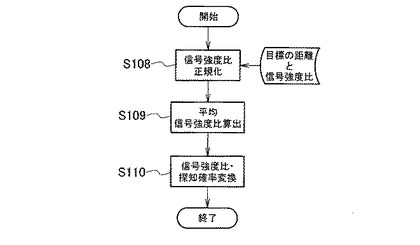
次いで、信号強度比正規化が行われる(ステップS108)。すなわち、データ解析部32は、レーダ装置1で検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化(変換)する。次いで、平均信号強度比算出が行われる(ステップS109)。すなわち、データ解析部32は、ステップS108の信号強度比正規化により得られた正規化された信号強度比の平均値を求めることにより、以下の式に示す平均信号強度比
を算出する。
【数11】
【0056】
次いで、信号強度比・探知確率変換が行われる(ステップS110)。すなわち、データ解析部32は、ステップS109の平均信号強度比算出により得られた平均信号強度比から、信号強度比を探知確率に変換する。信号強度比・探知確率変換は、以下の式で表される。
【数12】
【実施例3】
【0057】
本発明の実施例3に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0058】
本発明の実施例3に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図4に示すフローチャートを参照しながら説明する。
【0059】
探知距離算出処理においては、まず、信号強度比正規化が行われる(ステップS108)。次いで、平均信号強度比算出が行われる(ステップS109)。次いで、信号強度比・探知確率変換が行われる(ステップS110)。これらステップS108〜S110の処理内容は、実施例2のそれらと同じである。
【0060】
探知確率Pdが高い場合は、安定に追尾が継続されるケースが多いため、安定に追尾しているデータを解析することにより、実施例2のステップS101とステップS107とを省略することができ、実施例1および実施例2に係る探知距離算出方法よりも簡便な方法で探知距離を算出することができる。また、必ずしも探知確率Pdが1に近くないケースであっても、実施例1および実施例2に係る探知距離算出方法の近似計算として用いることも可能である。
【実施例4】
【0061】
本発明の実施例4に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0062】
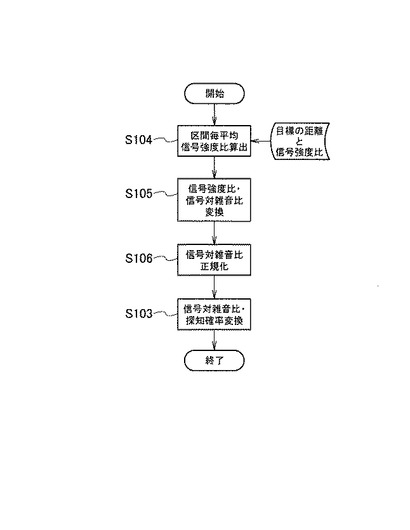
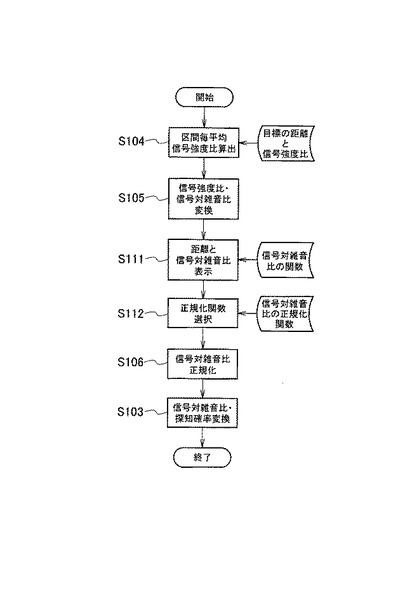
本発明の実施例4に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図5に示すフローチャートを参照しながら説明する。この探知距離算出処理は、実施例1の信号強度比・信号対雑音比変換(ステップS105)と信号対雑音比正規化(ステップS106)との間に、距離と信号対雑音比表示(ステップS111)と正規化関数選択(ステップS112)を追加したものである。
【0063】
探知距離算出処理においては、まず、区間毎平均信号強度比算出が行われる(ステップS104)。次いで、信号強度比・信号対雑音比変換が行われる(ステップS105)。これらステップS104およびステップS105の処理は、実施例1のそれらと同じである。
【0064】
次いで、距離と信号対雑音比表示が行われる(ステップS111)。すなわち、データ解析部32は、ステップS105の信号強度比・信号対雑音比変換により得られた距離区間毎の信号対雑音比とともに、複数の信号対雑音比の関数を表示する。また、各信号対雑音比の関数と距離区間毎の信号対雑音比の誤差を表示するように構成することもできる。
【0065】
次いで、正規化関数選択が行われる(ステップS112)。すなわち、データ解析部32は、ステップS111の距離と信号対雑音比表示により表示された複数の信号対雑音比の関数の中から、操作員が最もフィッティングすると判断して選択した信号対雑音比の関数の正規化関数を選択する。この正規化関数には、距離の4乗による正規化関数やクラッタを考慮した雑音と距離の関係に基づいた正規化関数が含まれる。
【0066】
次いで、信号対雑音比正規化が行われる(ステップS106)。すなわち、データ解析部32は、ステップS112の正規化関数選択により選択された正規化関数を用いて信号対雑音比を正規化する。次いで、信号対雑音比・探知確率変換が行われる(ステップS103)。これらステップS106およびステップS103の処理は、実施例1のそれらと同じである。
【0067】
なお、上述した実施例4では、ステップS106の信号対雑音比正規化で用いられる正規化関数を、操作員が選択するように構成したが、予め用意された複数の信号対雑音比の関数と距離区間毎の信号対雑音比の誤差が最も小さくなる関数に対応する正規化関数を、自動的に選択するように構成することもできる。
【実施例5】
【0068】
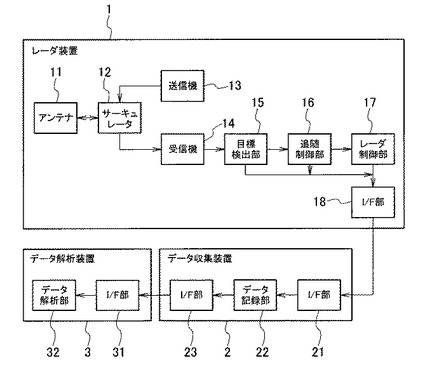
図6は、本発明の実施例5に係るレーダシステムの構成を示すブロック図である。このレーダシステムは、図7に示す従来のレーダシステムに含まれるレーダ装置1からデータ収集装置インタフェース部18を除去するとともに、データ記録部22aおよびデータ解析部32aを追加して構成されている。以下では、従来のレーダ装置1と同一または相当する構成要素には、従来のレーダ装置1と同一の符号を付して説明を省略または簡略化する。
【0069】
目標検出部15は、受信機14から送られてくる受信信号に基づき目標を検出する。この目標検出部15で検出された目標を表す情報は、検出情報として追随制御部16に送られる。追随制御部16は、目標検出部15から送られてくる検出情報を用いて追尾処理を実施する。この追随制御部16における追尾処理により得られた追尾情報は、レーダ制御部17に送られるとともに、データ記録部22aに送られる。レーダ制御部17は、追随制御部16から送られてくる追尾情報に基づきレーダ装置1の各部を制御する。
【0070】
データ記録部22aは、従来のレーダシステムのデータ収集装置2に含まれるデータ記録部22に対応する機能を有する。すなわち、データ記録部22aは、追随制御部16から送られてくる追尾情報を記録する。このデータ記録部22aに記録された追尾情報は、データ解析部32aに送られる。
【0071】
データ解析部32aは、ハードウェア、ソフトウェアまたはこれらの組み合わせによって構成されており、従来のレーダシステムのデータ解析装置3に含まれるデータ解析部32に対応する機能を有する。すなわち、データ記録部22aは、データ記録部22aから送られてくる追尾情報に基づき、所定の距離における探知確率を算出する。
【0072】
以上のように構成される本発明の実施例5に係るレーダシステムのデータ解析部32aは、上述した実施例1,3及び4に係るデータ解析装置3のデータ解析部32と同様の探知距離算出処理を実行する。
【0073】
この実施例5に係るレーダ装置によれば、検出情報を用いて行う探知確率の算出が不要であり、追尾情報に含まれる目標の距離と信号強度比を用いて探知距離の算出を行うように構成したので、検出情報の記録が不要となり、上述した実施例1〜実施例4に係る探知距離算出方法に使用されるレーダシステムより簡易な構成にすることができる。
【産業上の利用可能性】
【0074】
本発明は、レーダ性能解析装置またはレーダシステムやソナー性能解析装置またはソナーシステムなどに適用可能である。
【図面の簡単な説明】
【0075】
【図1】本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図2】本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を説明するための図である。
【図3】本発明の実施例2に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図4】本発明の実施例3に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図5】本発明の実施例4に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図6】本発明の実施例5に係るレーダシステムの構成を示すブロック図である。
【図7】従来のレーダシステムの構成を示すブロック図である。
【図8】従来の探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図9】従来の探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を説明するための図である。
【符号の説明】
【0076】
1 レーダ装置
2 データ収集装置
3 データ解析装置
11 アンテナ
12 サーキュレータ
13 送信機
14 受信機
15 目標検出部
16 追随制御部
17 レーダ制御部
18 データ収集装置インタフェース部
21 レーダ装置インタフェース部
22、22a データ記録部
23 データ解析装置インタフェース部
31 データ収集装置インタフェース部
32、32a データ解析部
【技術分野】
【0001】
本発明は、レーダ装置の探知距離を算出する探知距離算出方法およびこれを用いたレーダシステムに関する。
【背景技術】
【0002】
レーダ装置の実際の探知距離を評価するためには、目標機を飛行させて、レーダ装置によって検出された検出情報を収集し、この収集した検出情報を処理することによって所定の距離における探知確率を算出し、この算出された探知確率が所定の確率を満足しているか否かを判断する必要がある。収集された検出情報の処理は、一般に、データ解析装置において実施される。
【0003】
図7は、従来のデータ解析装置を含むレーダシステムの構成を示すブロック図である。このレーダシステムは、レーダ装置1、データ収集装置2およびデータ解析装置3から構成される。
【0004】
まず、レーダ装置1について説明する。レーダ装置1は、アンテナ11、サーキュレータ12、送信機13、受信機14、目標検出部15、追随制御部16、レーダ制御部17およびデータ収集装置インタフェース(I/F)部18から構成されている。
【0005】
アンテナ11は、送信機13からサーキュレータ12を経由して送られてくる送信信号を電波に変換し、送信波として指定方向の空間に送出するとともに、送信波の反射波を受信して電気信号に変換し、受信信号としてサーキュレータ12を介して受信機14に送る。受信機14は、アンテナ11からサーキュレータ12を経由して送られてくる受信信号をデジタル信号に変換し、目標検出部15に送る。
【0006】
目標検出部15は、受信機14から送られてくる受信信号に基づき目標を検出する。この目標検出部15で検出された目標を表す情報は、検出情報として追随制御部16に送られるとともに、データ収集装置インタフェース部(I/F)18を介してデータ収集装置2に送られる。追随制御部16は、目標検出部15から送られてくる検出情報を用いて追尾処理を実施する。この追随制御部16における追尾処理により得られた追尾情報は、レーダ制御部17に送られるとともに、データ収集装置インタフェース部18を介してデータ収集装置2に送られる。
【0007】
レーダ制御部17は、追随制御部16から送られてくる追尾情報に基づきレーダ装置1の各部を制御するとともに、自己の内部で発生された制御情報を、データ収集装置インタフェース部18を介してデータ収集装置2に送る。データ収集装置インタフェース部18は、上述したように、目標検出部15からの検出情報、追随制御部16からの追尾情報およびレーダ制御部17からの制御情報を、データ収集装置2に送る。
【0008】
次に、データ収集装置2について説明する。データ収集装置2は、レーダ装置インタフェース(I/F)部21、データ記録部22およびデータ解析装置インタフェース(I/F)部23から構成されている。
【0009】
レーダ装置インタフェース部21は、レーダ装置1から送られてくる検出情報、追尾情報および制御情報を受け取ってデータ記録部22に送る。データ記録部22は、レーダ装置1からレーダ装置インタフェース部21を介して送られてくる検出情報、追尾情報および制御情報を記録する。このデータ記録部22に記録された検出情報、追尾情報および制御情報は、データ解析装置インタフェース部23を介してデータ解析装置3に送られる。
【0010】
次に、データ解析装置3について説明する。データ解析装置3は、データ収集装置インタフェース(I/F)部31およびデータ解析部32から構成されている。データ収集装置インタフェース部31は、データ収集装置2から送られてくる検出情報および追尾情報を受け取ってデータ解析部32に送る。データ解析部32は、データ収集装置2からデータ収集装置インタフェース部31を介して送られてくる検出情報および追尾情報に基づき、所定の距離における探知確率を算出する。
【0011】
次に、上記のように構成される従来のレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図8に示すフローチャートを参照しながら説明する。
【0012】
探知距離算出処理においては、まず、区間毎の探知確率が算出される(ステップS101)。具体的には、データ解析部32は、目標機の検出機会と検出情報に含まれる目標機の検出回数から、所定の距離区間毎の探知確率を算出する。ここで、目標機の検出機会とは、目標検出部15が目標を検出するタイミングにおいて、目標機が当該距離区間に存在する可能性を言い、目標の移動速度によって決定される。また、目標機の検出回数とは、レーダ装置1が実際に目標を検出した回数を言う。
【0013】
次いで、探知確率フィッティングが行われる(ステップS102)。すなわち、データ解析部32は、所定の距離における信号対雑音比をパラメータとした理論的探知確率カーブが、ステップS101で算出された区間毎の探知確率に最も良くフィッティングする信号対雑音比を算出する。
【0014】
次いで、信号対雑音比・探知確率変換が行われる(ステップS103)。すなわち、データ解析部32は、ステップS102において算出された、最も良くフィッティングした所定の距離における信号対雑音比を、所定の距離における探知確率に変換する。さらに、探知確率が所定の値、例えば0.5になる距離に変換することもできる。
【0015】
上述した従来のレーダ装置の探知距離を算出する探知距離算出方法は、実際に飛行する目標機の諸元、特にRCS(Radar Cross Section:レーダ有効反射面積)が、探知距離の設計時の目標機のRCSと一致している場合は問題ない。
【0016】
しかしながら、小目標対処用のレーダ装置の探知距離を測定する場合、実際に小さいRCSを有する目標機を飛行させることは難しいので、通常のRCSを有する目標機を飛行させて、測定が行われる。この場合、設計上の探知距離付近から、探知確率が高くなってしまい、探知確率が大きく変化する、探知確率0.5付近のデータが得られなくなる。その結果、上述した探知確率フィッティングによって得られる信号対雑音比のばらつきが大きくなり、結果的に探知確率のばらつきが大きくなる。
【0017】
この場合のシミュレーション結果を図9に示す。図9(a)〜図9(c)は、RCSが探知距離の設計時の目標機のRCSと一致している場合(正規化距離1.0において、信号対雑音比が12.8dBの場合)を示し、図9(d)〜図9(f)は、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合(正規化距離1.0において、信号対雑音比が22.8dBの場合)を示している。
【0018】
図9(a)および図9(d)は、観測された探知確率とフィッティングカーブを示している。図9(b)および図9(e)は、正規化距離1.0における信号対雑音比に対する観測された探知確率とフィッティングカーブとの残差の二乗和の関係を示している。図9(c)および図9(f)は、(残差の二乗和が最小となる)最適信号対雑音比の100回のシミュレーションによるヒストグラムである。
【0019】
RCSが探知距離の設計時の目標機のRCSと一致している場合、図9(b)に示すように、正しい信号対雑音比(12.8dB)付近において、観測された探知確率とフィッティングカーブとの残差の二乗和が最小となる最適信号対雑音比が求められる。図9(c)に示す最適信号対雑音比のヒストグラムからも、最適信号対雑音比のばらつきが小さいことがわかる。
【0020】
一方、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合、図9(d)に示すように、設計上の探知距離付近から探知確率が高くなるため、探知確率が大きく変化する探知確率0.5付近のデータが得られなくなり、図9(e)に示すように、20〜30dB付近において、観測された探知確率とフィッティングカーブとの残差の二乗和が略一定となっている。この結果、図9(f)に示す最適信号対雑音比のヒストグラムでも、最適信号対雑音比のばらつきが大きくなっている。
【0021】
なお、探知距離算出方法に関連する技術として、特許文献1は、気象現象を観測するレーダ装置において、観測時の気象条件に応じて、レーダ観測諸元の最適化を効率よく行うレーダ装置を開示している。このレーダ装置は、気象現象を観測するレーダ装置において、観測時の気象条件に応じて気象モデルの設定を行う気象モデル設定手段と、設定された気象モデルから大気および粒子による電波の減衰率を求める減衰率計算手段と、この算出された大気および粒子による電波の減衰率を用いて探知距離を算出する探知距離評価手段と、この算出された探知距離からレーダ観測諸元を決定するレーダ観測諸元決定手段とを備えている。
【特許文献1】特開平10−227853号公報
【発明の開示】
【発明が解決しようとする課題】
【0022】
上述したように、従来のレーダ装置の探知距離の算出は、上述した方法で行われているので、実際に飛行する目標機のRCSが、探知距離の設計時の目標機のRCSよりも大きい場合、算出される探知確率の誤差が大きくなるという問題がある。
【0023】
また、実際に飛行する目標機のRCSが、探知距離の設計時の目標機のRCSと同等である場合であっても、所定の距離における探知確率の信頼性は、データ数に比例するため、探知確率の信頼性を上げようとすれば、目標機の飛行回数を増加する必要があるという問題がある。
【0024】
本発明は、上述した問題を解決するためになされたもので、その課題は、実際に飛行する目標機のRCSが探知距離の設計時の目標機のRCSよりも大きい場合であっても、算出される探知確率の誤差を小さくでき、しかも目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる探知距離算出方法およびこれを用いたレーダシステムを提供することにある。
【課題を解決するための手段】
【0025】
上記課題を解決するために、請求項1記載の発明は、目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、算出された平均信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップを含むことを特徴とする。
【0026】
請求項2記載の発明は、請求項1記載の発明において、距離の4乗による正規化関数およびクラッタを考慮した雑音と距離の関係に基づいた正規化関数を含む複数の正規化関数の中から1つの正規化関数を選択する正規化関数選択ステップを含み、信号対雑音比正規化ステップは、正規化関数選択ステップで選択された関数を用いて、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化することを特徴とする。
【0027】
請求項3記載の発明は、目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、目標の検出機会と目標の検出回数とから距離区間毎の探知確率を算出する区間毎探知確率算出ステップと、算出された距離区間毎の探知確率が高い距離区間のデータを抽出する高探知確率区間抽出ステップと、検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップを含むことを特徴とする。
【0028】
請求項4記載の発明は、請求項3記載の発明において、高探知確率区間抽出ステップでは、探知確率が0.9以上である場合に、探知確率が高い判断されることを特徴とする。
【0029】
請求項5記載の発明は、目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップとを含むことを特徴とする。
【0030】
請求項6記載の発明は、目標を検出して探知距離を算出するレーダシステムであって、目標を検出する目標検出部と、目標検出部で検出された目標を表す目標情報に基づき追随制御を行う追随制御部と、追随制御部からの追尾情報に基づき探知距離を算出するデータ解析部とを備え、データ解析部は、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出し、算出された平均信号強度比を信号対雑音比に変換し、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化し、正規化された信号対雑音比を探知確率に変換することを特徴とする。
【発明の効果】
【0031】
本発明に係る探知距離算出方法およびこれを用いたレーダシステムによれば、実際に飛行する目標機のRCSが、探知距離の設計時の目標機のRCSよりも大きな場合にも、算出される探知確率の誤差が大きくならず、また、目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明の実施の形態の図面を参照しながら詳細に説明する。なお、以下においては、従来の技術の欄で説明した構成部分に相当する部分には、従来の技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例1】
【0033】
本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0034】
本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図1に示すフローチャートを参照しながら説明する。
【0035】
探知距離算出処理においては、まず、区間毎平均信号強度比算出が行われる(ステップS104)。すなわち、データ解析部32は、目標機の距離と信号強度比とから、所定の距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する。ここで、信号強度比は、雑音Nに対する信号Sと雑音Nとの和の割合である。次いで、信号強度比・信号対雑音比変換が行われる(ステップS105)。すなわち、データ解析部32は、ステップS104で算出された平均信号強度比を用いて、信号強度比を信号対雑音比に変換する。
【0036】
一般に、レーダ装置1において検出された信号強度比は、あらかじめ設定された閾値よりも大きな信号強度比を持つもののみであり、検出されていない部分の信号強度比を知ることはできない。このため、検出された信号強度比の平均値は、本来の信号強度比の平均値よりも大きな値になる。また、検出されなかった信号強度比をある値、例えば0に置き換えた場合も、本来の信号強度比とは一致しない。
【0037】
このため、ステップS105の信号強度比・信号対雑音比変換では、以下の関係式に基づいて変換が行われる。目標がスワーリング1、雑音がレイリー分布に従うとすると、二乗検波した目標の確率密度関数は、以下の式で表される。
【数1】
【0038】
ここで、xは、目標の振幅
F(x)は、目標の振幅がxとなる確率
Sは、目標の平均値
Nは、雑音の平均値
閾値Tを用いて、目標の検出を行う場合、目標の検出確率Pdは、以下の式で表される。
【数2】
【0039】
この結果、検出された目標の振幅の平均値
は、以下の式で表される。
【数3】
【0040】
さらに、閾値係数をk1とし、T=k1・Nとすると、検出された目標の振幅の平均値
は、以下の式で表される。
【数4】
【0041】
最終的には、信号対雑音比S/Nは、検出された平均信号強度比
から以下の式で算出される。
【数5】
【0042】
以上の信号強度比・信号対雑音比変換が終了すると、次いで、信号対雑音比正規化が行われる(ステップS106)。すなわち、データ解析部32は、各距離Riの各信号対雑音比(S/N)iを、所定の距離R’における信号対雑音比(S/N)’iに正規化(変換)する。信号対雑音比の正規化は、以下の式で表される。
【数6】
【0043】
次いで、信号対雑音比・探知確率変換が行われる(ステップS103)。すなわち、データ解析部32は、ステップS106における信号対雑音比正規化によって算出された、正規化された信号対雑音比を、所定の距離における探知確率に変換する。信号対雑音比・探知確率変換は、以下の式で表される。
【数7】
【0044】
さらに、探知確率が所定の値、例えば0.5になる距離に変換することもできる。
【0045】
上述した算出方法による信号対雑音比のシミュレーション結果を図2に示す。図2(a)〜図2(c)は、RCSが探知距離の設計時の目標機のRCSと一致している場合(正規化距離1.0において、信号対雑音比が12.8dBの場合)を示し、図2(d)〜図2(f)は、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合(正規化距離1.0において、信号対雑音比が22.8dBの場合)を示している。
【0046】
図2(a)および図2(d)は、観測された平均信号強度比
と正規化距離との関係を示している。図2(b)および図2(e)は、正規化された信号対雑音比S/Nと正規化距離の関係を示している。図2(c)および図2(f)は、(残差の二乗和が最小となる)最適信号対雑音比の100回のシミュレーションによるヒストグラムである。
【0047】
図2(c)および図2(f)のヒストグラムから、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合も、RCSが探知距離の設計時の目標機のRCSと一致している場合と同様に、最適信号対雑音比のばらつきが小さいことがわかる。すなわち、従来の探知距離算出方法では、図9に示すように、RCSが探知距離の設計時の目標機のRCSよりも10dB大きい場合、最適信号対雑音比のばらつきが大きくなっていたが、本発明の実施例1に係る探知距離算出方法によれば、これが改善されている。
【実施例2】
【0048】
本発明の実施例2に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0049】
本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図3に示すフローチャートを参照しながら説明する。
【0050】
探知距離算出処理においては、まず、区間毎の探知確率算出が行われる(ステップS101)。具体的には、データ解析部32は、目標機の検出機会と目標機の検出回数とから、所定の距離区間毎の探知確率を算出する。次いで、高探知確率区間抽出が行われる(ステップS107)。すなわち、データ解析部32は、ステップS101の区間毎探知確率算出により得られた探知確率が、閾値以上の範囲を抽出する。この場合、高探知確率と判断する閾値を0.9とすることができる。
【0051】
下式のように、探知確率Pdが1に近ければ、信号強度比x/Nの期待値は、(S+N)/Nに近似できる。
【数8】
【0052】
また、下式のように、信号Sが雑音Nよりも非常に大きければ、(S+N)/Nは、信号対雑音比S/Nに近似できる。
【数9】
【0053】
さらに、探知確率Pdが高い場合は、S>>Nの条件も成立するため、下式が導かれる。
【数10】
【0054】
このため、探知確率Pdが高ければ、平均信号強度比
を信号対雑音比S/Nのかわりに用いることができる。
【0055】
次いで、信号強度比正規化が行われる(ステップS108)。すなわち、データ解析部32は、レーダ装置1で検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化(変換)する。次いで、平均信号強度比算出が行われる(ステップS109)。すなわち、データ解析部32は、ステップS108の信号強度比正規化により得られた正規化された信号強度比の平均値を求めることにより、以下の式に示す平均信号強度比
を算出する。
【数11】
【0056】
次いで、信号強度比・探知確率変換が行われる(ステップS110)。すなわち、データ解析部32は、ステップS109の平均信号強度比算出により得られた平均信号強度比から、信号強度比を探知確率に変換する。信号強度比・探知確率変換は、以下の式で表される。
【数12】
【実施例3】
【0057】
本発明の実施例3に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0058】
本発明の実施例3に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図4に示すフローチャートを参照しながら説明する。
【0059】
探知距離算出処理においては、まず、信号強度比正規化が行われる(ステップS108)。次いで、平均信号強度比算出が行われる(ステップS109)。次いで、信号強度比・探知確率変換が行われる(ステップS110)。これらステップS108〜S110の処理内容は、実施例2のそれらと同じである。
【0060】
探知確率Pdが高い場合は、安定に追尾が継続されるケースが多いため、安定に追尾しているデータを解析することにより、実施例2のステップS101とステップS107とを省略することができ、実施例1および実施例2に係る探知距離算出方法よりも簡便な方法で探知距離を算出することができる。また、必ずしも探知確率Pdが1に近くないケースであっても、実施例1および実施例2に係る探知距離算出方法の近似計算として用いることも可能である。
【実施例4】
【0061】
本発明の実施例4に係る探知距離算出方法に使用されるレーダシステムの構成は、図7を参照して説明した従来のレーダシステムの構成と同じであり、データ解析装置3において実施される処理のみが従来の処理と異なる。したがって、以下では、レーダシステムの構成の説明は省略し、データ解析装置3において実施される処理を中心に説明する。
【0062】
本発明の実施例4に係る探知距離算出方法に使用されるレーダシステムを構成するデータ解析装置3の動作を、探知距離算出処理を中心に、図5に示すフローチャートを参照しながら説明する。この探知距離算出処理は、実施例1の信号強度比・信号対雑音比変換(ステップS105)と信号対雑音比正規化(ステップS106)との間に、距離と信号対雑音比表示(ステップS111)と正規化関数選択(ステップS112)を追加したものである。
【0063】
探知距離算出処理においては、まず、区間毎平均信号強度比算出が行われる(ステップS104)。次いで、信号強度比・信号対雑音比変換が行われる(ステップS105)。これらステップS104およびステップS105の処理は、実施例1のそれらと同じである。
【0064】
次いで、距離と信号対雑音比表示が行われる(ステップS111)。すなわち、データ解析部32は、ステップS105の信号強度比・信号対雑音比変換により得られた距離区間毎の信号対雑音比とともに、複数の信号対雑音比の関数を表示する。また、各信号対雑音比の関数と距離区間毎の信号対雑音比の誤差を表示するように構成することもできる。
【0065】
次いで、正規化関数選択が行われる(ステップS112)。すなわち、データ解析部32は、ステップS111の距離と信号対雑音比表示により表示された複数の信号対雑音比の関数の中から、操作員が最もフィッティングすると判断して選択した信号対雑音比の関数の正規化関数を選択する。この正規化関数には、距離の4乗による正規化関数やクラッタを考慮した雑音と距離の関係に基づいた正規化関数が含まれる。
【0066】
次いで、信号対雑音比正規化が行われる(ステップS106)。すなわち、データ解析部32は、ステップS112の正規化関数選択により選択された正規化関数を用いて信号対雑音比を正規化する。次いで、信号対雑音比・探知確率変換が行われる(ステップS103)。これらステップS106およびステップS103の処理は、実施例1のそれらと同じである。
【0067】
なお、上述した実施例4では、ステップS106の信号対雑音比正規化で用いられる正規化関数を、操作員が選択するように構成したが、予め用意された複数の信号対雑音比の関数と距離区間毎の信号対雑音比の誤差が最も小さくなる関数に対応する正規化関数を、自動的に選択するように構成することもできる。
【実施例5】
【0068】
図6は、本発明の実施例5に係るレーダシステムの構成を示すブロック図である。このレーダシステムは、図7に示す従来のレーダシステムに含まれるレーダ装置1からデータ収集装置インタフェース部18を除去するとともに、データ記録部22aおよびデータ解析部32aを追加して構成されている。以下では、従来のレーダ装置1と同一または相当する構成要素には、従来のレーダ装置1と同一の符号を付して説明を省略または簡略化する。
【0069】
目標検出部15は、受信機14から送られてくる受信信号に基づき目標を検出する。この目標検出部15で検出された目標を表す情報は、検出情報として追随制御部16に送られる。追随制御部16は、目標検出部15から送られてくる検出情報を用いて追尾処理を実施する。この追随制御部16における追尾処理により得られた追尾情報は、レーダ制御部17に送られるとともに、データ記録部22aに送られる。レーダ制御部17は、追随制御部16から送られてくる追尾情報に基づきレーダ装置1の各部を制御する。
【0070】
データ記録部22aは、従来のレーダシステムのデータ収集装置2に含まれるデータ記録部22に対応する機能を有する。すなわち、データ記録部22aは、追随制御部16から送られてくる追尾情報を記録する。このデータ記録部22aに記録された追尾情報は、データ解析部32aに送られる。
【0071】
データ解析部32aは、ハードウェア、ソフトウェアまたはこれらの組み合わせによって構成されており、従来のレーダシステムのデータ解析装置3に含まれるデータ解析部32に対応する機能を有する。すなわち、データ記録部22aは、データ記録部22aから送られてくる追尾情報に基づき、所定の距離における探知確率を算出する。
【0072】
以上のように構成される本発明の実施例5に係るレーダシステムのデータ解析部32aは、上述した実施例1,3及び4に係るデータ解析装置3のデータ解析部32と同様の探知距離算出処理を実行する。
【0073】
この実施例5に係るレーダ装置によれば、検出情報を用いて行う探知確率の算出が不要であり、追尾情報に含まれる目標の距離と信号強度比を用いて探知距離の算出を行うように構成したので、検出情報の記録が不要となり、上述した実施例1〜実施例4に係る探知距離算出方法に使用されるレーダシステムより簡易な構成にすることができる。
【産業上の利用可能性】
【0074】
本発明は、レーダ性能解析装置またはレーダシステムやソナー性能解析装置またはソナーシステムなどに適用可能である。
【図面の簡単な説明】
【0075】
【図1】本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図2】本発明の実施例1に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を説明するための図である。
【図3】本発明の実施例2に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図4】本発明の実施例3に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図5】本発明の実施例4に係る探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図6】本発明の実施例5に係るレーダシステムの構成を示すブロック図である。
【図7】従来のレーダシステムの構成を示すブロック図である。
【図8】従来の探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を示すフローチャートである。
【図9】従来の探知距離算出方法に使用されるレーダシステムのデータ解析装置の動作を説明するための図である。
【符号の説明】
【0076】
1 レーダ装置
2 データ収集装置
3 データ解析装置
11 アンテナ
12 サーキュレータ
13 送信機
14 受信機
15 目標検出部
16 追随制御部
17 レーダ制御部
18 データ収集装置インタフェース部
21 レーダ装置インタフェース部
22、22a データ記録部
23 データ解析装置インタフェース部
31 データ収集装置インタフェース部
32、32a データ解析部
【特許請求の範囲】
【請求項1】
目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、
検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、
前記算出された平均信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、
前記変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、
前記正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップと、
を含むことを特徴とする探知距離算出方法。
【請求項2】
距離の4乗による正規化関数およびクラッタを考慮した雑音と距離の関係に基づいた正規化関数を含む複数の正規化関数の中から1つの正規化関数を選択する正規化関数選択ステップを含み、
前記信号対雑音比正規化ステップは、前記正規化関数選択ステップで選択された関数を用いて、前記変換により得られた信号対雑音比を、前記所定の距離における信号対雑音比に正規化することを特徴とする請求項1記載の探知距離算出方法。
【請求項3】
目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、
目標の検出機会と目標の検出回数とから距離区間毎の探知確率を算出する区間毎探知確率算出ステップと、
前記算出された距離区間毎の探知確率が高い距離区間のデータを抽出する高探知確率区間抽出ステップと、
検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、
前記正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、
前記算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップと、
を含むことを特徴とする探知距離算出方法。
【請求項4】
前記高探知確率区間抽出ステップでは、探知確率が0.9以上である場合に、探知確率が高い判断されることを特徴とする請求項3記載の探知距離算出方法。
【請求項5】
目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、
検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、
前記正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、
前記算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップと、
を含むことを特徴とする探知距離算出方法。
【請求項6】
目標を検出して探知距離を算出するレーダシステムであって、
目標を検出する目標検出部と、
前記目標検出部で検出された目標を表す目標情報に基づき追尾制御を行う追随制御部と、
前記追随制御部からの追尾情報に基づき探知距離を算出するデータ解析部
とを備え、
前記データ解析部は、
検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出し、
前記算出された平均信号強度比を信号対雑音比に変換し、
前記変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化し、
前記正規化された信号対雑音比を探知確率に変換することを特徴とするレーダシステム。
【請求項1】
目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、
検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、
前記算出された平均信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、
前記変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、
前記正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップと、
を含むことを特徴とする探知距離算出方法。
【請求項2】
距離の4乗による正規化関数およびクラッタを考慮した雑音と距離の関係に基づいた正規化関数を含む複数の正規化関数の中から1つの正規化関数を選択する正規化関数選択ステップを含み、
前記信号対雑音比正規化ステップは、前記正規化関数選択ステップで選択された関数を用いて、前記変換により得られた信号対雑音比を、前記所定の距離における信号対雑音比に正規化することを特徴とする請求項1記載の探知距離算出方法。
【請求項3】
目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、
目標の検出機会と目標の検出回数とから距離区間毎の探知確率を算出する区間毎探知確率算出ステップと、
前記算出された距離区間毎の探知確率が高い距離区間のデータを抽出する高探知確率区間抽出ステップと、
検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、
前記正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、
前記算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップと、
を含むことを特徴とする探知距離算出方法。
【請求項4】
前記高探知確率区間抽出ステップでは、探知確率が0.9以上である場合に、探知確率が高い判断されることを特徴とする請求項3記載の探知距離算出方法。
【請求項5】
目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、
検出された目標までの距離と信号強度比とから、信号強度比を所定の距離における信号強度比に正規化する信号強度比正規化ステップと、
前記正規化された信号強度比の平均値を求めることにより平均信号強度比を算出する平均信号強度比算出ステップと、
前記算出された平均信号強度比を探知確率に変換する信号強度比・探知確率変換ステップと、
を含むことを特徴とする探知距離算出方法。
【請求項6】
目標を検出して探知距離を算出するレーダシステムであって、
目標を検出する目標検出部と、
前記目標検出部で検出された目標を表す目標情報に基づき追尾制御を行う追随制御部と、
前記追随制御部からの追尾情報に基づき探知距離を算出するデータ解析部
とを備え、
前記データ解析部は、
検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出し、
前記算出された平均信号強度比を信号対雑音比に変換し、
前記変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化し、
前記正規化された信号対雑音比を探知確率に変換することを特徴とするレーダシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−240317(P2007−240317A)
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願番号】特願2006−62836(P2006−62836)
【出願日】平成18年3月8日(2006.3.8)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願日】平成18年3月8日(2006.3.8)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]