
接触子
【課題】所定の変位量を確保しつつ、所望の導通性を有する接触子を提供することにある。
【解決手段】蛇腹体20と、前記蛇腹体20の一端部21に接続され、かつ、前記蛇腹体20に沿って延在した固定接触片33,34を備えた固定部30と、前記蛇腹体20の他端部22に接続された可動部40とを有している。そして、前記可動部40を押圧して前記蛇腹体20を圧縮し、前記可動部40を前記固定部30の固定接触片33,34に接触させることで接触抵抗の小さい接触子が得られる。
【解決手段】蛇腹体20と、前記蛇腹体20の一端部21に接続され、かつ、前記蛇腹体20に沿って延在した固定接触片33,34を備えた固定部30と、前記蛇腹体20の他端部22に接続された可動部40とを有している。そして、前記可動部40を押圧して前記蛇腹体20を圧縮し、前記可動部40を前記固定部30の固定接触片33,34に接触させることで接触抵抗の小さい接触子が得られる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は接触子、例えば、集積回路検査用プローブに使用される接触子に関する。
【背景技術】
【0002】
従来、集積回路検査用プローブに使用される接触子としては、電子部品をソケット本体に対して押圧することにより、前記電子部品の電極端子と前記ソケット本体の電極部との接触を保持し、前記ソケット本体の電極部を被接続電子部品の電極端子に接続して成る電子部品用ソケットにおいて、前記ソケット本体の電極部が、所定の厚さの弾性板材を打ち抜き加工して両端に前記電子部品の電極端子および前記被接続電子部品の電極端子とそれぞれ接触する一対のコンタクトと、前記一対のコンタクト間に介在して前記一対のコンタクトを接続する連続して並設された蛇行部とを有することを特徴とする電子端子用ソケットの接触子がある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−134202号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述の電子端子用ソケットの接触子では、蛇行部の折り返し回数が少なく、所望の伸縮量(変位量)が確保しにくいので、使い勝手が悪い。このため、所望の伸縮量(変位量)を確保すべく、前記電子端子用ソケットの折り返し回数を増大させた長尺な接触子が考えられる。しかし、長尺な接触子の蛇行部が細長くなると、電気抵抗が増大し、電流が流れにくくなり、長尺化に限界があるという問題点がある。
本発明に係る接触子は、前述の問題点に鑑み、所定の変位量を確保しつつ、所望の導通性を有する接触子を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係る接触子は、前記課題を解決すべく、蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、前記可動部を押圧して前記蛇腹体を圧縮し、前記可動部を前記固定部の固定接触片に接触させる構成としてある。
【発明の効果】
【0006】
本発明によれば、所望の変位量を確保すべく、蛇腹体を長尺にしても、可動部と固定部の固定接触片との接触によって短絡し、接触抵抗を低下させることができるので、接触抵抗の小さい接触子が得られる。
【0007】
本発明に係る他の接触子は、前記課題を解決すべく、蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、前記可動部を押圧して前記蛇腹体を圧縮するとともに、前記蛇腹部を前記固定部の固定接触片に接触させる構成としてもよい。
【0008】
本発明によれば、所望の変位量を確保すべく、蛇腹体を長尺にしても、蛇腹部と固定部の固定接触片との接触によって短絡し、接触抵抗を低下させることができるので、接触抵抗の小さい接触子が得られる。
【0009】
本発明の実施形態としては、前記蛇腹体が、直線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなる形状であってもよい。
本実施形態によれば、設計しやすい接触子が得られる。
【0010】
本発明の他の実施形態としては、前記蛇腹体の隣り合う中間部の少なくとも1つに、接続用突起を設けておいてもよい。
本実施形態によれば、接続用突起を介して短絡することにより、接触抵抗がより一層低い接触子が得られる。
【0011】
本発明の別の実施形態としては、前記蛇腹体が、曲線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなる形状であってもよい。
本実施形態によれば、設計の自由度が広くなるという利点がある。
【0012】
本発明の異なる実施形態としては、前記蛇腹体が、中間部と円弧部との境界に相互に当接可能な接続用突起を設けておいてもよい。
本実施形態によれば、接続用突起を介して短絡することにより、接触抵抗がより一層低い接触子が得られる。
【0013】
本発明の別の実施形態としては、固定部の両側縁部から前記蛇腹体に沿って固定接触片を平行に延在してもよい。
本実施形態によれば、一対の固定接触片が可動部のガイド部材となり、動作特性が安定するとともに、一対の固定接触片のいずれか一方に可動部および蛇腹体が必ず接触するので、接触信頼性の高い接触子が得られる。
【0014】
本発明の異なる実施形態としては、蛇腹体と固定部との接続位置を、前記固定部の軸心上に配置してもよく、また、蛇腹体と固定部との接続位置を、前記固定部の軸心から偏心した位置に配置してもよい。
本実施形態によれば、蛇腹体と固定部との接続位置を、固定部の軸心上に配置した場合には、小さな操作力で操作でき、寿命の長い接触子が得られる。
一方、蛇腹体と固定部との接続位置を、固定部の軸心から偏心した位置に配置した場合には、蛇腹体が座屈しやすくなり、接点圧の高い接触子が得られる。
【0015】
本発明の異なる実施形態としては、蛇腹体と可動部との接続位置を、前記可動部の軸心上に配置してもよく、また、蛇腹体と可動部との接続位置を、前記可動部の軸心から偏心した位置に配置してもよい。
本実施形態によれば、蛇腹体と可動部との接続位置を、可動部の軸心上に配置した場合には、小さな操作力で操作でき、寿命の長い接触子が得られる。
一方、蛇腹体と可動部との接続位置を、可動部の軸心から偏心した位置に配置した場合には、蛇腹体が座屈しやすくなり、接点圧の高い接触子が得られるという効果がある。
【図面の簡単な説明】
【0016】
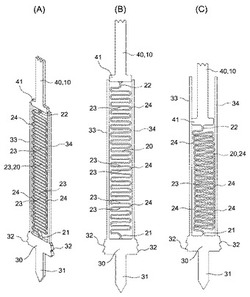
【図1】図1Aは本発明に係る接触子の第1実施形態を示す斜視図、図1B,1Bは動作前後を示す正面図である。
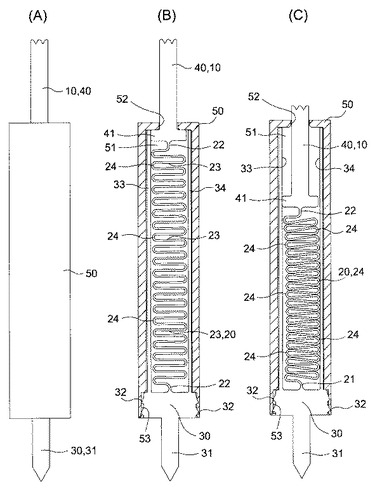
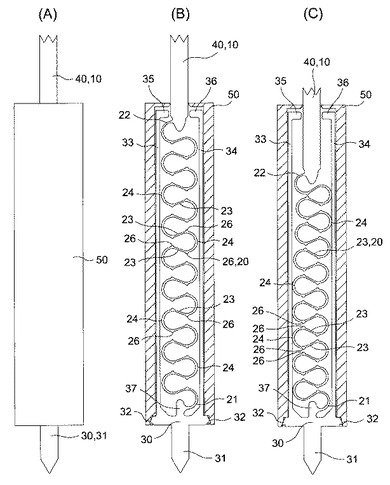
【図2】図2Aは図1に示す接触子をハウジング内に収納した正面図、図2B,2Cは動作前後を示す正面断面図である。
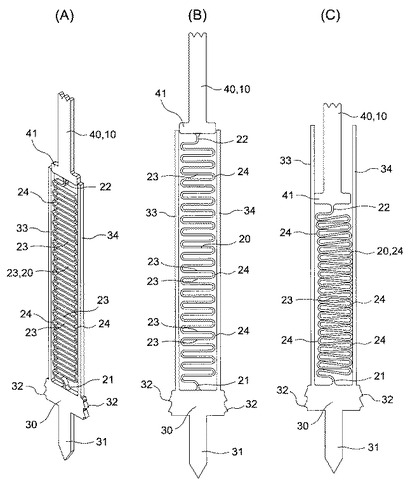
【図3】図3Aは本発明に係る接触子の第2実施形態を示す斜視図、図3B,3Cは動作前後を示す正面図である。
【図4】図4Aは図3に示す接触子をハウジング内に収納した正面図、図4B,4Cは動作前後を示す正面断面図である。
【図5】図5Aは本発明に係る接触子の第3実施形態を示す斜視図、図5B,5Cは動作前後を示す正面図である。
【図6】図6Aは図5に示す接触子をハウジング内に収納した正面図、図6B,6Cは動作前後を示す正面断面図である。
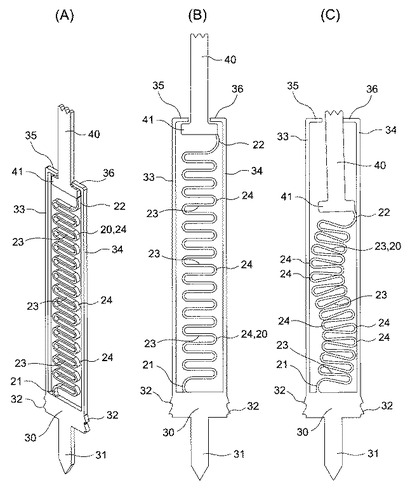
【図7】図7Aは本発明に係る接触子の第4実施形態を示す斜視図、図7B,7Cは動作前後を示す正面図である。
【図8】図8Aは図5に示す接触子をハウジング内に収納した正面図、図8B,8Cは動作前後を示す正面断面図である。
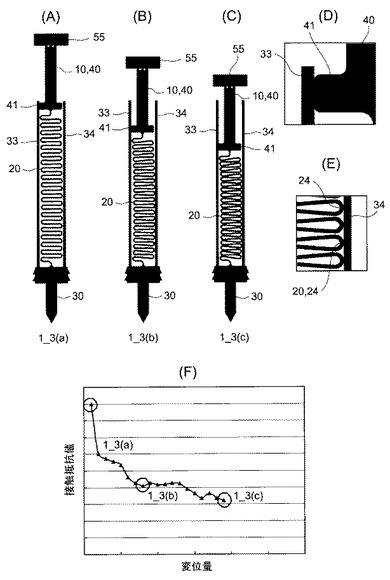
【図9】図9A,9B,9Cは第1実施形態の動作過程を示す正面図、図9Dは図9Aの部分拡大図、図9Eは図9Cの部分拡大図、図9Fは変位量と接触抵抗値との関係を測定した結果を示すグラフ図である。
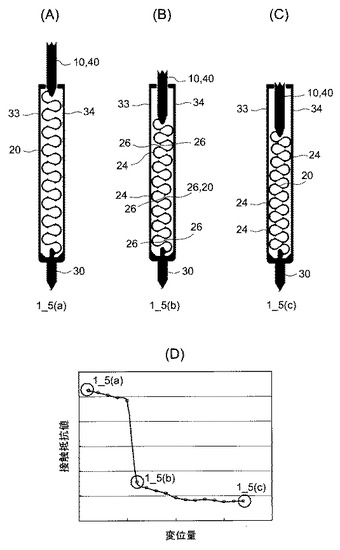
【図10】図10A,10B,10Cは第4実施形態の動作過程を示す正面図、図10Dは変位量と接触抵抗値との関係を測定した結果を示すグラフ図である。
【発明を実施するための形態】
【0017】
本発明に係る接触子の実施形態を図1ないし図8の添付図面に従って説明する。
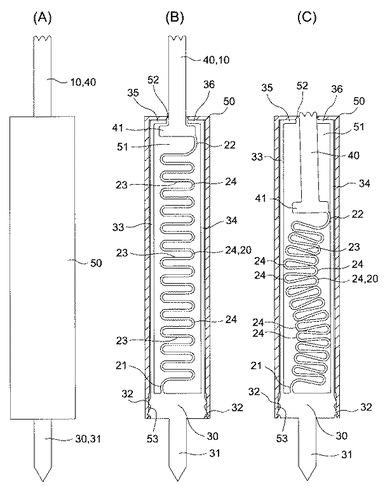
第1実施形態は、図1および図2に示すように、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0018】
前記蛇腹体20は、直線形状の中間部23と、隣り合う前記中間部23,23を接続する円弧部24とで形成されている。また、前記蛇腹体20は、その断面のアスペクト比が1.5以上、好ましくは2以上であり、プレス加工で形成してもよく、電気鋳造法で形成してもよい。なお、ここでアスペクト比とは、蛇腹体20の断面における厚さ寸法と高さ寸法との比をいう。
【0019】
前記固定部30は、その上端のうち、その軸心上に前記蛇腹体20の一端部21を接続してあるとともに、その下端に端子部31を軸心に沿って延在してある。また、前記固定部30は、その両側側面に係止用爪部32を突設してあるとともに、その上端の両側縁部から固定接触片33,34を前記蛇腹体20に沿って平行に延在してある。
【0020】
前記可動部40は正面略T字形状を有し、その巾広部41の下端のうち、その軸心上に前記蛇腹体20の他端部22を接続してある。
【0021】
ハウジング50は、図2に示すように、前記接触子10を収納可能なスリット51を有する直方体形状であり、その上端面に操作孔52を有する一方、その下端面に圧入孔53を有している。
【0022】
そして、図2に示すように、可動部40を押し下げると、蛇腹体20が圧縮されることにより、巾広部41が固定接触片33,34の内側面に摺動する。一方、円弧部24が固定接触片33,34に接触するとともに、隣り合う円弧部24,24が相互に接触して短絡する。このため、可動部40の変位量に応じて接触抵抗が低下し、電流が流れる。
【0023】
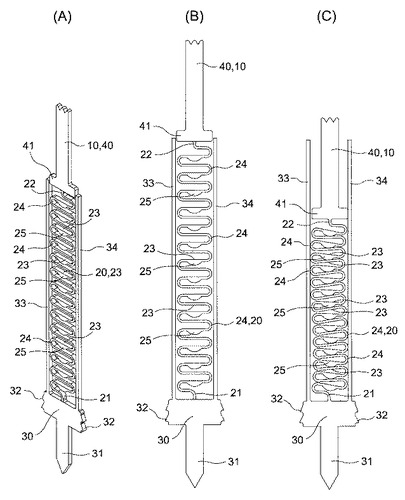
第2実施形態は、図3および図4に示すように、前述の第1実施形態と同様であり、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0024】
前記蛇腹体20は、直線形状の中間部23と、隣り合う前記中間部23,23を接続する円弧部24とで形成されている。
【0025】
前記固定部30は、その上端のうち、その軸心から偏心した位置に前記蛇腹体20の一端部21を接続してあるとともに、その下端に端子部31を軸心に沿って延在してある。また、前記固定部30は、その両側側面に係止用爪部32を突設してあるとともに、その上端の両側縁部から固定接触片33,34を前記蛇腹体20に沿って平行に延在してある。さらに、前記固定接触片33,34は、その上端部を内側に屈曲した屈曲部35,36を設けることにより、後述する可動部40を抜け止めする。
【0026】
前記可動部40は正面略T字形状を有し、その巾広部41の下端のうち、軸心から偏心した位置に前記蛇腹体20の他端部22を接続してある。
【0027】
ハウジング50は、図4に示すように、前記接触子10を収納可能なスリット51を有する直方体形状であり、その上端面に操作孔52を有する一方、その下端面に圧入孔53を有している。
【0028】
そして、前記可動部40を押し下げると、蛇腹体20が圧縮されるとともに、座屈することにより、巾広部41の片側が固定接触片34の内側面に接触する。一方、隣り合う円弧部24,24が相互に接触するとともに、固定接触片33,34の内側面に接触して短絡する。このため、可動部40の変位量に応じて接触抵抗が低下し、電流が流れる。
【0029】
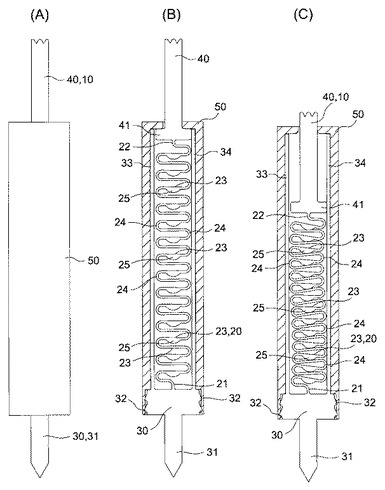
第3実施形態は、図5および図6に示すように、前述の第1実施形態とほぼ同様であり、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0030】
第3実施形態が第1実施形態と異なる点は、蛇腹体20の隣り合う中間部23の一方に接続用突起25を設けた点である。他は前述の第1実施形態と同様であるので、同一部分に同一番号を附して説明を省略する。
【0031】
本実施形態によれば、図6に示すように、可動部40を押し下げると、蛇腹体20が圧縮されることにより、巾広部41が固定接触片33,34のいずれかの内側面に摺接する。一方、蛇腹体20の接続用突起25が対向する中間部23に接触するとともに、円弧部24が固定接触片33,34のいずれかに接触して短絡することにより、接触抵抗が低下し、電流が流れる。
【0032】
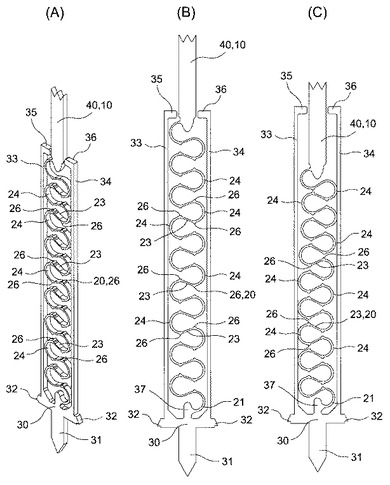
第4実施形態は、図7および図8に示すように、前述の第1実施形態とほぼ同様であり、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0033】
前記蛇腹体20は、曲線形状の中間部23と、隣り合う前記中間部23を接続する円弧部24とで形成されている。そして、前記中間部23と前記円弧部24との境界に相互に接触可能な接続用突起26をそれぞれ設けてある。
【0034】
前記固定部30は、その上端のうち、その軸心上に突設した接続用軸部37に前記蛇腹体20の一端部21を接続してあるとともに、その下端に端子部31を軸心に沿って延在してある。また、前記固定部30は、その両側側面に係止用爪部32を突設してあるとともに、その上端の両側縁部から固定接触片33,34を前記蛇腹体20に沿って平行に延在してある。前記固定接触片33,34は、その上端部を内側に屈曲した屈曲部35,36を設けることにより、後述する蛇腹体20を抜け止めする。
【0035】
前記可動部40は正面略I字形状を有し、その下端の軸心から偏心した位置に前記蛇腹体20の他端部22を接続してある。
【0036】
ハウジング50は、図8に示すように、前記接触子10を収納可能なスリット51を有する直方体形状であり、その上端面に操作孔52を有する一方、その下端面に圧入孔53を有している。
【0037】
本実施形態によれば、図8に示すように、可動部40を押し下げると、蛇腹体20が圧縮されて座屈することにより、円弧部24が固定接触片33,34の内側面に接触するとともに、蛇腹体20の隣り合う接続用突起26が相互に接触して短絡することにより、接触抵抗が低下し、電流が流れる。
【実施例1】
【0038】
第1実施形態に係る接触子の変位量と接触抵抗値との関係を測定した。測定結果を図9Fに図示する。
図9Fから明らかなように、動作前(図9A)においては極めて接触抵抗値が大きく、電流はほとんど流れない。
そして、可動部40を操作体55で押し下げると、可動部40の巾広部41と固定接触片33,34の内側面とが接触し(図9A,図9D)、接触抵抗値が急激に低下して電流が流れ始める。
さらに、前記可動部40を押し下げると(図9B,図9C)、蛇腹体20の隣り合う円弧部24が相互に接触して短絡するとともに、固定接触片34に接触する(図9E)。このため、接触抵抗が漸次、低下し、電流が安定して流れる。
【0039】
前述の実施例1から、例えば、集積回路検査用プローブとして利用できるだけでなく、スイッチとしても利用できることが判った。
特に、集積回路検査用プローブとして使用すれば、前記接触子は肉厚を薄く形成できるので、狭いピッチで多数の接触子を配置できるとともに、部品点数の少ない集積回路検査用プローブが得られる。また、スイッチとして利用すれば、応答性の良いスイッチが得られる。
【実施例2】
【0040】
第4実施形態に係る接触子の変位量と接触抵抗値との関係を測定した。測定結果を図10Dに図示する。
図10Dから明らかなように、動作前(図10A)においては極めて接触抵抗値が大きく、電流はほとんど流れない。
そして、可動部40を押し下げても、所定の変位量に達するまで急激に接触抵抗値が低下することはない。しかし、所定の変位量に達すると(図10B)、座屈量が急増することにより、蛇腹体20の円弧部24が固定接触片33,34の内側面に接触して短絡する。このため、接触抵抗値が急激に低下し、電流が流れ始める。
さらに、前記可動部を押し下げると(図10C)、蛇腹体20の隣り合う接続用突起26が相互に接触して短絡するので、接触抵抗が漸次、低下し、電流が安定して流れる。
【0041】
前述の実施例2から、集積回路検査用プローブとして利用できるだけでなく、スイッチとしても利用できることが判った。
特に、集積回路検査用プローブとして使用すれば、前記接触子は肉厚を薄く形成できるので、狭いピッチで多数の接触子を配置できるとともに、部品点数の少ない集積回路検査用プローブが得られる。また、スイッチとして使用すれば、所定の量だけ押し込んだ後に電流が流れ始めるので、実施例1と異なる動作特性のスイッチが得られる。
【産業上の利用可能性】
【0042】
本発明に係る接触子は集積回路検査用プローブ、スイッチとしてだけではなく、例えば、バッテリの接続端子として利用してもよい。
また、ハウジングは一体成形したものに限らず、2分割できるものであってもよいことは勿論である。
【符号の説明】
【0043】
10:接触子
20:蛇腹体
21:一端部
22:他端部
23:中間部
24:円弧部
25:接続用突起
26:接続用突起
30:固定部
31:端子部
32:係止用爪部
33,34:固定接触片
35,36:屈曲部
37:接続用軸部
40:可動部
41:巾広部
50:ハウジング
51:スリット
52:操作孔
53:圧入孔
【技術分野】
【0001】
本発明は接触子、例えば、集積回路検査用プローブに使用される接触子に関する。
【背景技術】
【0002】
従来、集積回路検査用プローブに使用される接触子としては、電子部品をソケット本体に対して押圧することにより、前記電子部品の電極端子と前記ソケット本体の電極部との接触を保持し、前記ソケット本体の電極部を被接続電子部品の電極端子に接続して成る電子部品用ソケットにおいて、前記ソケット本体の電極部が、所定の厚さの弾性板材を打ち抜き加工して両端に前記電子部品の電極端子および前記被接続電子部品の電極端子とそれぞれ接触する一対のコンタクトと、前記一対のコンタクト間に介在して前記一対のコンタクトを接続する連続して並設された蛇行部とを有することを特徴とする電子端子用ソケットの接触子がある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−134202号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述の電子端子用ソケットの接触子では、蛇行部の折り返し回数が少なく、所望の伸縮量(変位量)が確保しにくいので、使い勝手が悪い。このため、所望の伸縮量(変位量)を確保すべく、前記電子端子用ソケットの折り返し回数を増大させた長尺な接触子が考えられる。しかし、長尺な接触子の蛇行部が細長くなると、電気抵抗が増大し、電流が流れにくくなり、長尺化に限界があるという問題点がある。
本発明に係る接触子は、前述の問題点に鑑み、所定の変位量を確保しつつ、所望の導通性を有する接触子を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係る接触子は、前記課題を解決すべく、蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、前記可動部を押圧して前記蛇腹体を圧縮し、前記可動部を前記固定部の固定接触片に接触させる構成としてある。
【発明の効果】
【0006】
本発明によれば、所望の変位量を確保すべく、蛇腹体を長尺にしても、可動部と固定部の固定接触片との接触によって短絡し、接触抵抗を低下させることができるので、接触抵抗の小さい接触子が得られる。
【0007】
本発明に係る他の接触子は、前記課題を解決すべく、蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、前記可動部を押圧して前記蛇腹体を圧縮するとともに、前記蛇腹部を前記固定部の固定接触片に接触させる構成としてもよい。
【0008】
本発明によれば、所望の変位量を確保すべく、蛇腹体を長尺にしても、蛇腹部と固定部の固定接触片との接触によって短絡し、接触抵抗を低下させることができるので、接触抵抗の小さい接触子が得られる。
【0009】
本発明の実施形態としては、前記蛇腹体が、直線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなる形状であってもよい。
本実施形態によれば、設計しやすい接触子が得られる。
【0010】
本発明の他の実施形態としては、前記蛇腹体の隣り合う中間部の少なくとも1つに、接続用突起を設けておいてもよい。
本実施形態によれば、接続用突起を介して短絡することにより、接触抵抗がより一層低い接触子が得られる。
【0011】
本発明の別の実施形態としては、前記蛇腹体が、曲線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなる形状であってもよい。
本実施形態によれば、設計の自由度が広くなるという利点がある。
【0012】
本発明の異なる実施形態としては、前記蛇腹体が、中間部と円弧部との境界に相互に当接可能な接続用突起を設けておいてもよい。
本実施形態によれば、接続用突起を介して短絡することにより、接触抵抗がより一層低い接触子が得られる。
【0013】
本発明の別の実施形態としては、固定部の両側縁部から前記蛇腹体に沿って固定接触片を平行に延在してもよい。
本実施形態によれば、一対の固定接触片が可動部のガイド部材となり、動作特性が安定するとともに、一対の固定接触片のいずれか一方に可動部および蛇腹体が必ず接触するので、接触信頼性の高い接触子が得られる。
【0014】
本発明の異なる実施形態としては、蛇腹体と固定部との接続位置を、前記固定部の軸心上に配置してもよく、また、蛇腹体と固定部との接続位置を、前記固定部の軸心から偏心した位置に配置してもよい。
本実施形態によれば、蛇腹体と固定部との接続位置を、固定部の軸心上に配置した場合には、小さな操作力で操作でき、寿命の長い接触子が得られる。
一方、蛇腹体と固定部との接続位置を、固定部の軸心から偏心した位置に配置した場合には、蛇腹体が座屈しやすくなり、接点圧の高い接触子が得られる。
【0015】
本発明の異なる実施形態としては、蛇腹体と可動部との接続位置を、前記可動部の軸心上に配置してもよく、また、蛇腹体と可動部との接続位置を、前記可動部の軸心から偏心した位置に配置してもよい。
本実施形態によれば、蛇腹体と可動部との接続位置を、可動部の軸心上に配置した場合には、小さな操作力で操作でき、寿命の長い接触子が得られる。
一方、蛇腹体と可動部との接続位置を、可動部の軸心から偏心した位置に配置した場合には、蛇腹体が座屈しやすくなり、接点圧の高い接触子が得られるという効果がある。
【図面の簡単な説明】
【0016】
【図1】図1Aは本発明に係る接触子の第1実施形態を示す斜視図、図1B,1Bは動作前後を示す正面図である。
【図2】図2Aは図1に示す接触子をハウジング内に収納した正面図、図2B,2Cは動作前後を示す正面断面図である。
【図3】図3Aは本発明に係る接触子の第2実施形態を示す斜視図、図3B,3Cは動作前後を示す正面図である。
【図4】図4Aは図3に示す接触子をハウジング内に収納した正面図、図4B,4Cは動作前後を示す正面断面図である。
【図5】図5Aは本発明に係る接触子の第3実施形態を示す斜視図、図5B,5Cは動作前後を示す正面図である。
【図6】図6Aは図5に示す接触子をハウジング内に収納した正面図、図6B,6Cは動作前後を示す正面断面図である。
【図7】図7Aは本発明に係る接触子の第4実施形態を示す斜視図、図7B,7Cは動作前後を示す正面図である。
【図8】図8Aは図5に示す接触子をハウジング内に収納した正面図、図8B,8Cは動作前後を示す正面断面図である。
【図9】図9A,9B,9Cは第1実施形態の動作過程を示す正面図、図9Dは図9Aの部分拡大図、図9Eは図9Cの部分拡大図、図9Fは変位量と接触抵抗値との関係を測定した結果を示すグラフ図である。
【図10】図10A,10B,10Cは第4実施形態の動作過程を示す正面図、図10Dは変位量と接触抵抗値との関係を測定した結果を示すグラフ図である。
【発明を実施するための形態】
【0017】
本発明に係る接触子の実施形態を図1ないし図8の添付図面に従って説明する。
第1実施形態は、図1および図2に示すように、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0018】
前記蛇腹体20は、直線形状の中間部23と、隣り合う前記中間部23,23を接続する円弧部24とで形成されている。また、前記蛇腹体20は、その断面のアスペクト比が1.5以上、好ましくは2以上であり、プレス加工で形成してもよく、電気鋳造法で形成してもよい。なお、ここでアスペクト比とは、蛇腹体20の断面における厚さ寸法と高さ寸法との比をいう。
【0019】
前記固定部30は、その上端のうち、その軸心上に前記蛇腹体20の一端部21を接続してあるとともに、その下端に端子部31を軸心に沿って延在してある。また、前記固定部30は、その両側側面に係止用爪部32を突設してあるとともに、その上端の両側縁部から固定接触片33,34を前記蛇腹体20に沿って平行に延在してある。
【0020】
前記可動部40は正面略T字形状を有し、その巾広部41の下端のうち、その軸心上に前記蛇腹体20の他端部22を接続してある。
【0021】
ハウジング50は、図2に示すように、前記接触子10を収納可能なスリット51を有する直方体形状であり、その上端面に操作孔52を有する一方、その下端面に圧入孔53を有している。
【0022】
そして、図2に示すように、可動部40を押し下げると、蛇腹体20が圧縮されることにより、巾広部41が固定接触片33,34の内側面に摺動する。一方、円弧部24が固定接触片33,34に接触するとともに、隣り合う円弧部24,24が相互に接触して短絡する。このため、可動部40の変位量に応じて接触抵抗が低下し、電流が流れる。
【0023】
第2実施形態は、図3および図4に示すように、前述の第1実施形態と同様であり、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0024】
前記蛇腹体20は、直線形状の中間部23と、隣り合う前記中間部23,23を接続する円弧部24とで形成されている。
【0025】
前記固定部30は、その上端のうち、その軸心から偏心した位置に前記蛇腹体20の一端部21を接続してあるとともに、その下端に端子部31を軸心に沿って延在してある。また、前記固定部30は、その両側側面に係止用爪部32を突設してあるとともに、その上端の両側縁部から固定接触片33,34を前記蛇腹体20に沿って平行に延在してある。さらに、前記固定接触片33,34は、その上端部を内側に屈曲した屈曲部35,36を設けることにより、後述する可動部40を抜け止めする。
【0026】
前記可動部40は正面略T字形状を有し、その巾広部41の下端のうち、軸心から偏心した位置に前記蛇腹体20の他端部22を接続してある。
【0027】
ハウジング50は、図4に示すように、前記接触子10を収納可能なスリット51を有する直方体形状であり、その上端面に操作孔52を有する一方、その下端面に圧入孔53を有している。
【0028】
そして、前記可動部40を押し下げると、蛇腹体20が圧縮されるとともに、座屈することにより、巾広部41の片側が固定接触片34の内側面に接触する。一方、隣り合う円弧部24,24が相互に接触するとともに、固定接触片33,34の内側面に接触して短絡する。このため、可動部40の変位量に応じて接触抵抗が低下し、電流が流れる。
【0029】
第3実施形態は、図5および図6に示すように、前述の第1実施形態とほぼ同様であり、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0030】
第3実施形態が第1実施形態と異なる点は、蛇腹体20の隣り合う中間部23の一方に接続用突起25を設けた点である。他は前述の第1実施形態と同様であるので、同一部分に同一番号を附して説明を省略する。
【0031】
本実施形態によれば、図6に示すように、可動部40を押し下げると、蛇腹体20が圧縮されることにより、巾広部41が固定接触片33,34のいずれかの内側面に摺接する。一方、蛇腹体20の接続用突起25が対向する中間部23に接触するとともに、円弧部24が固定接触片33,34のいずれかに接触して短絡することにより、接触抵抗が低下し、電流が流れる。
【0032】
第4実施形態は、図7および図8に示すように、前述の第1実施形態とほぼ同様であり、蛇腹体20と、蛇腹体20の一端部21に接続された固定部30と、前記蛇腹体20の他端部22に接続された可動部40とで形成された接触子10を、ハウジング50内に収納したものである。
【0033】
前記蛇腹体20は、曲線形状の中間部23と、隣り合う前記中間部23を接続する円弧部24とで形成されている。そして、前記中間部23と前記円弧部24との境界に相互に接触可能な接続用突起26をそれぞれ設けてある。
【0034】
前記固定部30は、その上端のうち、その軸心上に突設した接続用軸部37に前記蛇腹体20の一端部21を接続してあるとともに、その下端に端子部31を軸心に沿って延在してある。また、前記固定部30は、その両側側面に係止用爪部32を突設してあるとともに、その上端の両側縁部から固定接触片33,34を前記蛇腹体20に沿って平行に延在してある。前記固定接触片33,34は、その上端部を内側に屈曲した屈曲部35,36を設けることにより、後述する蛇腹体20を抜け止めする。
【0035】
前記可動部40は正面略I字形状を有し、その下端の軸心から偏心した位置に前記蛇腹体20の他端部22を接続してある。
【0036】
ハウジング50は、図8に示すように、前記接触子10を収納可能なスリット51を有する直方体形状であり、その上端面に操作孔52を有する一方、その下端面に圧入孔53を有している。
【0037】
本実施形態によれば、図8に示すように、可動部40を押し下げると、蛇腹体20が圧縮されて座屈することにより、円弧部24が固定接触片33,34の内側面に接触するとともに、蛇腹体20の隣り合う接続用突起26が相互に接触して短絡することにより、接触抵抗が低下し、電流が流れる。
【実施例1】
【0038】
第1実施形態に係る接触子の変位量と接触抵抗値との関係を測定した。測定結果を図9Fに図示する。
図9Fから明らかなように、動作前(図9A)においては極めて接触抵抗値が大きく、電流はほとんど流れない。
そして、可動部40を操作体55で押し下げると、可動部40の巾広部41と固定接触片33,34の内側面とが接触し(図9A,図9D)、接触抵抗値が急激に低下して電流が流れ始める。
さらに、前記可動部40を押し下げると(図9B,図9C)、蛇腹体20の隣り合う円弧部24が相互に接触して短絡するとともに、固定接触片34に接触する(図9E)。このため、接触抵抗が漸次、低下し、電流が安定して流れる。
【0039】
前述の実施例1から、例えば、集積回路検査用プローブとして利用できるだけでなく、スイッチとしても利用できることが判った。
特に、集積回路検査用プローブとして使用すれば、前記接触子は肉厚を薄く形成できるので、狭いピッチで多数の接触子を配置できるとともに、部品点数の少ない集積回路検査用プローブが得られる。また、スイッチとして利用すれば、応答性の良いスイッチが得られる。
【実施例2】
【0040】
第4実施形態に係る接触子の変位量と接触抵抗値との関係を測定した。測定結果を図10Dに図示する。
図10Dから明らかなように、動作前(図10A)においては極めて接触抵抗値が大きく、電流はほとんど流れない。
そして、可動部40を押し下げても、所定の変位量に達するまで急激に接触抵抗値が低下することはない。しかし、所定の変位量に達すると(図10B)、座屈量が急増することにより、蛇腹体20の円弧部24が固定接触片33,34の内側面に接触して短絡する。このため、接触抵抗値が急激に低下し、電流が流れ始める。
さらに、前記可動部を押し下げると(図10C)、蛇腹体20の隣り合う接続用突起26が相互に接触して短絡するので、接触抵抗が漸次、低下し、電流が安定して流れる。
【0041】
前述の実施例2から、集積回路検査用プローブとして利用できるだけでなく、スイッチとしても利用できることが判った。
特に、集積回路検査用プローブとして使用すれば、前記接触子は肉厚を薄く形成できるので、狭いピッチで多数の接触子を配置できるとともに、部品点数の少ない集積回路検査用プローブが得られる。また、スイッチとして使用すれば、所定の量だけ押し込んだ後に電流が流れ始めるので、実施例1と異なる動作特性のスイッチが得られる。
【産業上の利用可能性】
【0042】
本発明に係る接触子は集積回路検査用プローブ、スイッチとしてだけではなく、例えば、バッテリの接続端子として利用してもよい。
また、ハウジングは一体成形したものに限らず、2分割できるものであってもよいことは勿論である。
【符号の説明】
【0043】
10:接触子
20:蛇腹体
21:一端部
22:他端部
23:中間部
24:円弧部
25:接続用突起
26:接続用突起
30:固定部
31:端子部
32:係止用爪部
33,34:固定接触片
35,36:屈曲部
37:接続用軸部
40:可動部
41:巾広部
50:ハウジング
51:スリット
52:操作孔
53:圧入孔
【特許請求の範囲】
【請求項1】
蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、
前記可動部を押圧して前記蛇腹体を圧縮し、前記可動部を前記固定部の固定接触片に接触させることを特徴とする接触子。
【請求項2】
蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、
前記可動部を押圧して前記蛇腹体を圧縮するとともに、前記蛇腹部を前記固定部の固定接触片に接触させることを特徴とする接触子。
【請求項3】
前記蛇腹体が、直線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなることを特徴とする請求項1または2に記載の接触子。
【請求項4】
前記蛇腹体の隣り合う中間部の少なくとも1つに、接続用突起を設けたことを特徴とする請求項3に記載の接触子。
【請求項5】
前記蛇腹体が、曲線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなることを特徴とする請求項1または2に記載の接触子
【請求項6】
前記蛇腹体が、中間部と円弧部との境界に相互に当接可能な接続用突起を設けたことを特徴とする請求項5に記載の接触子
【請求項7】
固定部の両側縁部から前記蛇腹体に沿って固定接触片を平行に延在したことを特徴とする請求項1ないし6のいずれか1項に記載の接触子。
【請求項8】
蛇腹体と固定部との接続位置を、前記固定部の軸心上に配置したことを特徴とする請求項1ないし7のいずれか1項に記載の接触子。
【請求項9】
蛇腹体と固定部との接続位置を、前記固定部の軸心から偏心した位置に配置したことを特徴とする請求項1ないし7のいずれか1項に記載の接触子。
【請求項10】
蛇腹体と可動部との接続位置を、前記可動部の軸心上に配置したことを特徴とする請求項1ないし9のいずれか1項に記載の接触子。
【請求項11】
蛇腹体と可動部との接続位置を、前記可動部の軸心から偏心した位置に配置したことを特徴とする請求項1ないし9のいずれか1項に記載の接触子。
【請求項1】
蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、
前記可動部を押圧して前記蛇腹体を圧縮し、前記可動部を前記固定部の固定接触片に接触させることを特徴とする接触子。
【請求項2】
蛇腹体と、前記蛇腹体の一端部に接続され、かつ、前記蛇腹体に沿って延在した少なくとも1本の固定接触片を備えた固定部と、前記蛇腹体の他端部に接続された可動部とを有し、
前記可動部を押圧して前記蛇腹体を圧縮するとともに、前記蛇腹部を前記固定部の固定接触片に接触させることを特徴とする接触子。
【請求項3】
前記蛇腹体が、直線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなることを特徴とする請求項1または2に記載の接触子。
【請求項4】
前記蛇腹体の隣り合う中間部の少なくとも1つに、接続用突起を設けたことを特徴とする請求項3に記載の接触子。
【請求項5】
前記蛇腹体が、曲線形状の中間部と、隣り合う前記中間部を接続する円弧部とからなることを特徴とする請求項1または2に記載の接触子
【請求項6】
前記蛇腹体が、中間部と円弧部との境界に相互に当接可能な接続用突起を設けたことを特徴とする請求項5に記載の接触子
【請求項7】
固定部の両側縁部から前記蛇腹体に沿って固定接触片を平行に延在したことを特徴とする請求項1ないし6のいずれか1項に記載の接触子。
【請求項8】
蛇腹体と固定部との接続位置を、前記固定部の軸心上に配置したことを特徴とする請求項1ないし7のいずれか1項に記載の接触子。
【請求項9】
蛇腹体と固定部との接続位置を、前記固定部の軸心から偏心した位置に配置したことを特徴とする請求項1ないし7のいずれか1項に記載の接触子。
【請求項10】
蛇腹体と可動部との接続位置を、前記可動部の軸心上に配置したことを特徴とする請求項1ないし9のいずれか1項に記載の接触子。
【請求項11】
蛇腹体と可動部との接続位置を、前記可動部の軸心から偏心した位置に配置したことを特徴とする請求項1ないし9のいずれか1項に記載の接触子。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−89370(P2013−89370A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227161(P2011−227161)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000002945)オムロン株式会社 (3,542)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000002945)オムロン株式会社 (3,542)
[ Back to top ]