
接触検知センサ、駆動装置、及び、介護用ベッド
【課題】柔軟体が接触したことを非柔軟体と比較して高感度で検知する接触検知センサを提供することを目的とする。
【解決手段】接触検知センサ11は、導電布12と、多数の開口部22を有する絶縁スペーサ13と、シート状の導電体よりなる導電シート14と、を備え、導電布12及び導電シート14の間に絶縁スペーサ13を介在した構成である。人体等の柔軟体25が所定以上の力で導電布12に接触すると、導電布12を介して絶縁スペーサ13が柔軟体25に沈み込む。そして、導電布12は、絶縁スペーサ13の絶縁片に沿って形状を変形し、導電布12の一部が導電シート14に接触することで、柔軟体25が接触したことを検知する。
【解決手段】接触検知センサ11は、導電布12と、多数の開口部22を有する絶縁スペーサ13と、シート状の導電体よりなる導電シート14と、を備え、導電布12及び導電シート14の間に絶縁スペーサ13を介在した構成である。人体等の柔軟体25が所定以上の力で導電布12に接触すると、導電布12を介して絶縁スペーサ13が柔軟体25に沈み込む。そして、導電布12は、絶縁スペーサ13の絶縁片に沿って形状を変形し、導電布12の一部が導電シート14に接触することで、柔軟体25が接触したことを検知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、接触を検知する接触検知センサ、駆動装置、及び、介護用ベッドに関する。
【背景技術】
【0002】
病院施設又は介護施設等では、床部の背もたれを電動機で起し上げることができる介護用ベッドが広く普及している。このような介護用ベッドにおいて、背もたれを起した背上げ姿勢からフラット姿勢へと変形させるとき、背もたれの下面とベッドフレームとの間に人体又は異物を挟んでしまう挟み込みが発生する場合がある。この挟み込みを検知するための安全対策が、検討されている。
【0003】
安全対策の一つとして、シート状の接触検知センサを背もたれの背面全体に貼り付けて、人体又は異物の挟み込みを接触検知センサで検知し、背もたれを停止させる方法がある。
【0004】
また、安全対策の一つとして、介護用ベッドではないが、産業用ロボットの外周側面に板状の接触検知センサを取り付けて、その接触検知センサに何かが触れると、その産業用ロボットの動作を停止させる方法がある(例えば、特許文献1参照)。
【0005】
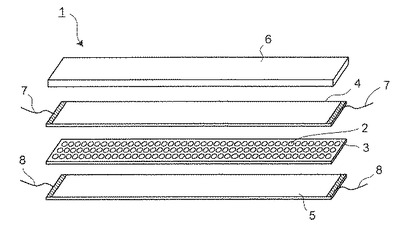
図13は、従来の接触検知センサ1の斜視図である。従来の接触検知センサ1は、多数の孔2を有する長方形シート状の絶縁スペーサ3と、絶縁スペーサ3を挟んで導電面を向かい合わせて配置された2枚の長方形シート状の導電シート4、5と、導電シート4の外面を覆う絶縁体の長方形シート状の柔軟シート6とを有する。
【0006】
また、導電シート4、5の両端には、導線7、8が接続されている。導線7、8は、電流等の検知回路を通じて、直流電源と接続されている。このような構成の接触検知センサ1は、柔軟シート6に触れると電流等が変化するため、接触の検知が可能である。
【0007】
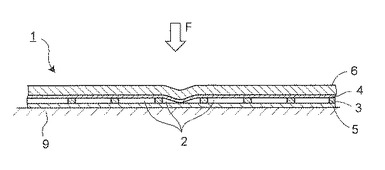
図14は、従来の接触検知センサ1の接触時の断面図である。接触検知センサ1の接触検知の動作について説明する。
【0008】
接触検知センサ1は、例えば、産業用ロボットの側面9に取り付けられている。そして、柔軟シート6の上から押圧力Fが作用すると、柔軟シート6及び導電シート4が押圧力Fによって変形し、導電シート4が孔2の内側へ入り込む。孔2の内側へ入り込んだ導電シート4は、導電シート5に密着する。その結果、導線7と導線8が接続されて電流等が変化することにより、検知回路は、接触検知センサ1の接触の有無を判定することができる。
【0009】
このような接触検知センサ1を用いることで、広い範囲で外部からの接触を検知することができる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−102719号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、従来の接触検知センサを、例えば介護用ベッドの挟み込み検知に用いると、接触検知センサは、人体と異物とを区別せずに、所定以上の力が加わった場合に挟み込みを検知する。ここで、人体に危害を与えないようにするために、接触検知センサの感度を高く設定した場合は、異物に対しても同じ感度で接触を検知することになる。その結果、挟み込みを検知する必要が無い場合でも、挟み込みを検知してしまう。例えば介護用ベッドにおいて、挟み込みを検知するとベッドの背もたれの駆動を停止する制御とした場合、接触検知センサの感度を高く設定すると、頻繁に背もたれの駆動が停止して、利便性が低下する。また、誤検知を少なくするため、挟み込み検知の感度を低くした場合は、人体に対する感度も低下し、人体を挟み込んだ際に危害が加わる可能性が高くなる。
【0012】
すなわち、従来の接触検知センサでは、人体のような柔軟体と硬い異物とを区別できずに、同様の力が加わると、同じように接触を検知する。
【0013】
本発明は、上記従来の課題を解決するためのものであり、人体のような柔軟体が接触したことを高感度で検知する接触検知センサ、駆動装置、及び、介護用ベッドを提供することを目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するために、本発明は以下のように構成する。
【0015】
本発明の1つの態様によれば、複数の開口部を有する絶縁スペーサと、前記絶縁スペーサの一方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第1導電シートと、前記絶縁スペーサの他方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第2導電シートと、を備えて、前記絶縁スペーサの前記開口部を介して、前記第1導電シートと前記第2導電シートとが電気的に接触することにより、接触を検知する接触検知センサを提供する。
【0016】
本発明の別の態様によれば、前記態様のいずれか1つに記載の前記接触検知センサを筐体の表面に設けて、前記接触検知センサでの接触検知により駆動制御される駆動装置を提供する。
【0017】
本発明の別の態様によれば、前記態様に記載の接触検知センサを有する介護用ベッドを提供する。
【発明の効果】
【0018】
本発明は、柔軟体が接触したことを高感度で検知する接触検知センサ、接触検知センサを使用する駆動装置、及び、介護用ベッドを提供することができる。
【図面の簡単な説明】
【0019】
【図1A】図1Aは、本発明の第1実施形態における接触検知センサの斜視図であり、
【図1B】図1Bは、第1実施形態における接触検知センサの非接触時の図1AのA−A線の一部断面図であり、
【図1C】図1Cは、第1実施形態における接触検知センサの柔軟体が接触したときの図1AのA−A線の一部断面図であり、
【図2】図2は、第1実施形態における接触検知センサの柔軟体が接触したときの部分拡大断面図であり、
【図3】図3は、第1実施形態における接触検知センサに非柔軟体が接触したときの一部断面図であり、
【図4】図4は、第1実施形態における接触検知センサの分解斜視図であり、
【図5A】図5Aは、第1実施形態における接触検知センサを平面の筐体に装着した場合の断面図であり、
【図5B】図5Bは、第1実施形態における接触検知センサを曲面の筐体に装着した場合の断面図であり、
【図6】図6は、第1実施形態における接触検知センサに柔軟体が接触したときの断面図であり、
【図7】図7は、本発明の第2実施形態における菱形の絶縁線を有する接触検知センサの断面図であり、
【図8】図8は、第2実施形態におけるD形の絶縁線を有する接触検知センサの断面図であり、
【図9】図9は、本発明の第3実施形態における接触検知センサの穴あき型の絶縁スペーサの上面図であり、
【図10A】図10Aは、第4実施形態におけるドット型の絶縁スペーサの上面図であり、
【図10B】図10Bは、第4実施形態におけるドット型の絶縁スペーサの一部断面図であり、
【図10C】図10Cは、第4実施形態の第1変形例におけるドット型の絶縁スペーサの上面図であり、
【図10D】図10Dは、第4実施形態の第2変形例におけるドット型の絶縁スペーサの一部断面図であり、
【図10E】図10Eは、第4実施形態の第3変形例におけるドット型の絶縁スペーサの一部断面図であり、
【図11】図11は、本発明の第5実施形態における介護用ベッドの斜視図であり、
【図12】図12は、第5実施形態における介護用ベッドの背ボトムの背面図であり、
【図13】図13は、従来の接触検知センサの分解斜視図であり、
【図14】図14は、従来の接触検知センサの接触時の断面図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下の説明において、同じ構成要素には同じ符号を付しており、説明を省略する場合もある。また、図面は理解しやすくするために、それぞれの構成要素を主体に模式的に示している。
【0021】
(第1実施形態)
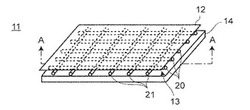
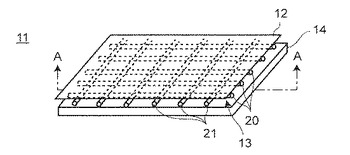
図1A,図1B,図1Cは、本発明の第1実施形態における接触検知センサ11の斜視図と一部断面図である。図1Aは接触検知センサ11の斜視図であり、図1Bは非接触時の図1AのA−A線の一部断面図であり、図1Cは柔軟体25が接触したときの図1AのA−A線の一部断面図である。
【0022】
図1Aに示すように、第1実施形態の接触検知センサ11は、多数の開口部22を有する絶縁スペーサ13と、この絶縁スペーサ13を挟んで配置された導電布12と導電シート14とを備える構成である。第1導電シートの一例である導電布12は、絶縁スペーサ13の一方の面(例えば、図1Aの上面)に接している。第2導電シートの一例である導電シート14は、絶縁スペーサ13の他方の面(例えば、図1Aの下面)に接している。なお、導電布12と導電シート14とは、それぞれ、導電性を有する。
【0023】
導電布12は、有機繊維の表面に極めて薄い金属メッキを加工した織物である。詳しくは後述するが、第1実施形態の導電布12は、絶縁スペーサ13の表面の凹凸に沿った変形が必要であるため、可能な限り薄いものが望ましい。具体的には、0.1mm以下であることが望ましい。また、第1実施形態の導電布12は、導電シート14との接触によって生ずる電流又は抵抗の変化を顕著にするために、その抵抗値は低いものが望ましい。本第1実施形態では、導電布12の一例として、厚みが0.09mm程度で、抵抗が0.05Ω/sq程度で、材料が銅を含浸したPET織物のものを使用した。 絶縁スペーサ13は、複数の絶縁線20,21を格子状に組み合わせて構成されている。絶縁スペーサ13を構成する部材(絶縁線20,21)は、導電布12及び導電シート14より剛性の高い材料を用いることが望ましい。複数の絶縁線20及び複数の絶縁線21は、例えば、それぞれ等間隔に配置されている。一例として、図1A〜図1Cでは、各絶縁線21と各絶縁線20とが互いに直交するようにして、絶縁スペーサ13を構成している。具体的には、等間隔かつ平行に配置した複数の絶縁線21の上側に、等間隔かつ平行に配置した複数の絶縁線20を、固定することなく、載置して、絶縁スペーサ13を構成している。第1実施形態では、絶縁スペーサ13の一例として、直径が0.9mm程度のポリエステルを使用した。
【0024】
導電シート14は、シート面に外部より力が加わると、厚さ方向(図1B,図1Cの上下方向)に自在に変形可能な厚みを持たせた部材である。詳しくは後述するが、第1実施形態では、絶縁スペーサ13の少なくとも一部の絶縁線20,21が導電シート14内に沈み込む(めり込む)必要がある。そのため、導電シート14は、導電シート14に力が加わった場合に、容易に変形可能な材料を用いる必要がある。また、第1実施形態では、図3に示す非柔軟体26の接触を検知するために、導電シート14の厚さは、絶縁スペーサ13の厚さ以上とする必要がある。導電シート14の材質としては、導電性を有し、厚み方向に柔軟性を有する部材が望ましい。導電シート14の具体的な材質としては、導電性スポンジ又は導電性ゴム等が望ましい。第1実施形態では、導電シート14の一例として、厚みが3.4mm程度であり、抵抗が0.05Ω/sq程度である導電スポンジを使用した。
【0025】
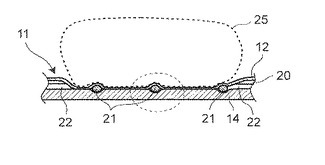
図1Bに示すように、第1実施形態の接触検知センサ11では、接触検知センサ11に何も接触していないとき(柔軟体25が接触検知センサ11に接触していないとき)は、絶縁スペーサ13の存在により、全ての領域において導電布12と導電シート14とが全く接触していない。
【0026】
その後、図1Cに示すように、例えば、接触検知センサ11に柔軟体25の一例である人体の一部が接触すると、導電布12と導電シート14とが部分的に接触する。第1実施形態では、接触検知センサ11の導電布12と導電シート14とが接触することで生ずる電流又は抵抗の変化を接触検知回路15で検出することで、接触検知センサ11に柔軟体25が接触したことを検知する。
【0027】
図2は、第1実施形態における柔軟体25が接触検知センサ11へ接触したときの接触検知センサ11の部分拡大断面図である。
【0028】
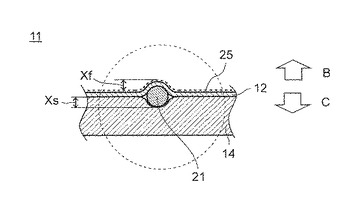
柔軟体25が所定以上の力で接触検知センサ11に接触すると、絶縁線20,21は、柔軟体25と導電シート14のどちらにも沈み込む(簡略化するため、図2では、絶縁線21のみが柔軟体25と導電シート14とに沈み込んだ状態を図示している。)。このとき、導電布12は、絶縁線20,21の外形に沿って変形し、導電布12と導電シート14とが接触する。ここで、導電布12には、絶縁線20,21に沿うための柔軟性が必要である。また、絶縁線20,21としては、柔軟体25及び導電シート14よりも剛性の高い材質を用いる必要がある。第1実施形態では、絶縁線20,21としてポリエステルを使用しているので、導電シート14として使用している導電スポンジよりも、充分に剛性が高い。
【0029】
また、絶縁線20,21の断面形状は円形であることが望ましい。絶縁線20,21の断面形状として円形が望ましい理由について説明する。絶縁線20,21の断面の中心より図2の矢印B又は矢印Cの方向に細くなる形状であれば、絶縁線20,21は柔軟体25又は導電シート14に沈み込み易くなり、本発明で目的とする機能を実現することができる。しかし、例えば矢印Bの方向に尖った形状では、柔軟体25が人体の一部である場合、その人に痛みを与える可能性がある。このような問題を解決するために、第1実施形態においては、絶縁線20,21の断面形状は円形が最適である。
【0030】
図3は、第1実施形態における接触検知センサ11に非柔軟体26が接触したときの接触検知センサ11の断面図である。ここで、非柔軟体26とは、柔軟体25よりも硬く、絶縁線20,21よりも硬い。すなわち、非柔軟体26は、絶縁線20,21が沈み込まない物体を意味している。例えば、非柔軟体26としては、金属材料、樹脂材料のものが考えられる。
【0031】
第1実施形態では、前述のように、導電シート14の厚みを、絶縁スペーサ13の厚み以上に厚くしている。これにより、非柔軟体26が所定以上の力で導電布12を介して絶縁線20,21に接触すると、絶縁線20,21が導電シート14内に完全に沈み込む(簡略化するため、図3では、絶縁線21のみが導電シート14に沈み込んだ状態を図示している。)。この絶縁線20,21の沈み込みによって、導電布12と導電シート14とが接触するため、非柔軟体26の接触を検知することができる。
【0032】
図3に示すように、非柔軟体26が接触検知センサ11に接触した場合、接触検知センサ11で接触を検知するためには、絶縁線20,21が導電シート14内に完全に沈み込んで、導電布12と導電シート14とが接触する必要がある。そのため、図2に示した柔軟体25の場合に比べて、図3に示した非柔軟体26の場合は、接触検知に大きな力を必要とする。つまり、第1実施形態の接触検知センサ11は、柔軟体25が絶縁線20,21に応じて変形することを利用して、非柔軟体26に比べて柔軟体25を高感度に検出することを可能とする。よって、第1実施形態の接触検知センサ11を用いることで、柔軟体25の一例である人体の接触を非柔軟体26に比べて高感度で検知するとともに、誤検知の少ない接触検知センサを実現することができる。
【0033】
ここで、以上に説明した、非柔軟体26に比べて柔軟体25を高感度に検出することができる内容について、数式を用いて説明する。以下の説明では、簡略化するため、絶縁線として絶縁線21のみを考慮して、絶縁線20を省略している。
【0034】
図2に示すように、絶縁線21が柔軟体25に沈み込む変形量をxfとし、絶縁線21が導電シート14に沈み込む変形量をxsとする。また、柔軟体25の弾性係数をkfとし、導電シート14の弾性係数をksとし、接触検知センサ11と柔軟体25との間で発生している力をF(xf+xs)とする。すると、以下の(式1)が成り立つ。
【0035】
【数1】

ここで、図3のように、柔軟体25の代わりに非柔軟体26が接触するとき、xfが0となり、kfが無限大となるため、(式1)は以下の(式2)になる。ここで、F(xs)は、接触検知センサ11と非柔軟体26との間で発生している力である。
【0036】
【数2】
【0037】
導電布12と導電シート14とが接触するためには、変形量の合計が下側(導電シート側)の絶縁線21の厚みdに等しくなればよい。よって、導電布12と導電シート14とが接触するときの力F(d)は、柔軟体25の場合は以下の(式3)となり、非柔軟体26の場合は以下の(式4)となる。
【0038】
【数3】
【0039】
【数4】
(式4)の弾性係数は、導電シート14の弾性係数ksである。それに対して、(式3)の弾性係数は、導電シート14と柔軟体25とを直列に接続した場合の合成弾性係数(1/{1/(kf)+1/(ks)})となっている。すなわち、これらの式から、非柔軟体26の(式4)の弾性係数よりも、柔軟体25の(式3)の弾性係数が低いことがわかる。よって、同じ量を変形させる場合、柔軟体25が接触した方が、非柔軟体26が接触するより、弱い力で変形することがわかる。そのため、第1実施形態の接触検知センサ11は、非柔軟体26よりも柔軟体25に高感度で反応するセンサとなる。よって、第1実施形態の接触検知センサ11は、1つの接触検知センサで、人体(柔軟体25)の接触と硬い異物(非柔軟体26)の接触とを、異なる感度で検知することができる。
【0040】
図4は、第1実施形態における接触検知センサ11の分解斜視図である。
【0041】
図4に示すように、絶縁スペーサ13は、等間隔にかつ平行に並べた複数の絶縁線21の上に、等間隔にかつ平行に並べた複数の絶縁線20を、格子状となるように載せた構成である。このような構成により、絶縁スペーサ13の面積を最小とすることができ、センサの不感帯領域が最小となる。また、不感帯領域である絶縁スペーサ13の絶縁線20,21の幅は一定であるため、絶縁線20,21は、柔軟体25及び導電シート14に均一に沈み込む。そのため、第1実施形態の接触検知センサ11は、不感帯領域における接触検知感度を均一に近づけることが可能である。
【0042】
なお、絶縁線20,21の線径又は材質又は配置間隔によって、接触検知センサ11の感度は変化する。接触検知センサ11としては、人体を挟み込んだ際に怪我をさせない程度の感度で検知する必要がある。そのため、第1実施形態では、一例として、線径が直径0.9mm程度のポリエステルの繊維で構成される絶縁線20,21を、5mm程度の間隔に配置した絶縁スペーサ13を使用している。
【0043】
ここで、発明者らは、非柔軟体の感度と比較して柔軟体の感度を高くするために、種々の条件で実験を行い、感帯領域(絶縁線20,21間の開口部)の面積と不感帯領域の面積との関係が「0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6」が好ましいことを見出した。たとえば、上述の条件(絶縁線20,21の線径が直径0.9mmで、間隔が5mm)では、「52/(0.45+5+0.45)2=0.72」となり、この関係を満たしている。この関係を満たすことで、非柔軟体の感度と比較して柔軟体の感度を高くすることが可能であると考える。
【0044】
ここで、絶縁線20は、第2保持部28と固着部30aとによって保持されている。具体的には、第2保持部28は、絶縁線20の片端である第1端部(例えば図4の右端部)をそれらの導電布12に対する摺動を許容しつつ導電布12に保持する。固着部30aは、絶縁線20のもう一方の片端である第2端部(例えば図4の左端部)を導電布12に固定する。また、絶縁線21は、第2保持部28と固着部30aとによって保持されている。具体的には、第2保持部28は、絶縁線21の片端である第1端部(例えば図4の下端部)をそれらの導電布12に対する摺動を許容しつつ導電布12に保持する。固着部30aは、絶縁線21のもう一方の片端である第2端部(例えば図4の上端部)を導電布12に固定する。
【0045】
同様に、絶縁線20は、第1保持部27と固着部30bとによって保持されている。具体的には、第1保持部27は、絶縁線20の一端である第2端部(例えば図4の左端部)をそれらの導電シート14に対する摺動を許容しつつ導電シート14に保持する。固着部30bは、絶縁線20の他端である第1端部(例えば図4の右端部)を導電シート14に固定する。また、絶縁線21は、第1保持部27と固着部30bとによって保持されている。具体的には、第1保持部27は、絶縁線21の一端である第2端部(例えば図4の奥側の端部)をそれらの導電シート14に対する摺動を許容しつつ導電シート14に保持する。固着部30bは、絶縁線21の他端である第1端部(例えば図4の手前側の端部)を導電シート14に固定する。
【0046】
すなわち、第2保持部28は導電布12に設けられ、第1保持部27は導電シート14に設けられている。
【0047】
なお、導電布12と絶縁線20,21の第1端部とは、接着材により接着して固定している。固着部30aは、その接着材が固化した部分である。同様に、導電シート14と絶縁線20,21の第2端部とは、接着材により接着して固定している。固着部30bは、その接着材が固化した部分である。
【0048】
第1実施形態の第1保持部27は、一例として、繊維より構成される糸でU字形を作り、このU字形の中に絶縁線20又は21を通した上で導電シート14に縫い付けたものを使用している。同様に、第1実施形態の第2保持部28は、繊維より構成される糸でU字形を作り、このU字形の中に絶縁線20又は21を通した上で導電布12に縫い付けたものを使用している。
【0049】
図5A及び図5Bは、第1実施形態における接触検知センサ11の断面図である。図5Aは、平面の筐体39に装着した場合の断面図であり、図5Bは、曲面の筐体40に装着した場合の断面図である。
【0050】
図5A及び図5Bを用いて、接触検知センサ11を曲面の筐体40に装着可能な理由について説明する。
【0051】
接触検知センサ11における絶縁線20,21は、導電布12に対して、それぞれの第2端部を固着部30aで固定している。また、接触検知センサ11における絶縁線20,21は、導電シート14に対して、それぞれの第1端部を固着部30bで固定している。
【0052】
図5Bに示すように、導電シート14を凸形状(図5Bの上向きの凸形状)に曲げた際、絶縁線20,21の片端(固着部側)は導電シート14に対して固定端となっているが、他端(保持部側)は導電シート14に対して開放端となっている。そのため、絶縁線20,21は、導電シート14の上を滑り、導電シート14に沿って曲げられる。同様に、絶縁線20,21の片端(固着部側)は導電布12に対して固定端となっているが、絶縁線20,21の他端(保持部側)は開放端となっている。そのため、導電布12は、絶縁線20,21上を滑り、絶縁線20,21に沿って曲げられる。また、絶縁スペーサ13は、絶縁線21の上に絶縁線20を載せただけであり、絶縁線20と絶縁線21とが交差する部分は固定(接着)されていない。そのため、絶縁線20は、絶縁線21の上を滑ることができる。このような構成の絶縁スペーサ13を曲げた場合、積層方向に力が発生しないので、導電布12と導電シート14とは一定の距離を保ち、接触することがない。すなわち、このような絶縁スペーサ13を曲げただけでは、導電布12と導電シート14とは接触せず、第1実施形態の接触検知センサ11として接触検知することが可能である。そのため、第1実施形態の接触検知センサ11は、曲面の筐体40に装着可能である。
【0053】
図6は、第1実施形態において、柔軟体25が接触検知センサ11に接触したときの接触検知センサ11の断面図である。
【0054】
前述のように、第1実施形態の接触検知センサ11は、絶縁線21の片端である第2端部を導電布12に固着部30aで固定し、第1端部を第2保持部28で摺動させながら保持している。そのため、第1実施形態の接触検知センサ11は、導電布12を絶縁スペーサ13上で滑らせることができる。
【0055】
よって、図6に示すように、柔軟体25が接触検知センサ11に接触した際、接触検知センサ11は、柔軟体25が導電布12を介して絶縁線21へ沈み込む。このとき、導電布12は、絶縁線21の第1端部を第2保持部28で摺動可能に保持しているので、第1端部は開放端となり、絶縁線21に対して導電布12は動くことができる。よって、接触検知センサ11に接触が発生しても、導電布12の張力は高くならず、絶縁線20,21に導電布12を沿わせ易い。そのため、第1実施形態の接触検知センサ11は、柔軟体25を高感度に検出することができる。
【0056】
逆に、第1実施形態とは異なり、導電布12が絶縁線20,21の両端に固定された状態について考える。導電布12が絶縁線20,21の両端に固体された状態において接触検知センサ11が曲げられた場合、導電シート14が絶縁線20,21側に押されて導電布12と接触し、勝手に接触検知することがある。すなわち、導電布12が絶縁線20,21の両端に固体された状態において接触検知センサ11が曲げられた場合、柔軟体25又は非柔軟体26が接触していないにも関わらず、接触を検知することがある。そのため、導電布12が絶縁線20,21の両端に固体された状態は、湾曲した部位を有する対象物に接触検知センサが貼り付けて行う場合において、接触検知には適さない。
【0057】
第1実施形態によれば、柔軟体25が接触検知センサ11に接触するときは、柔軟体25が絶縁スペーサ13(絶縁線20,21)に応じて変形することを利用して、柔軟体25と共に導電布12が絶縁スペーサ13の開口部22内に入り込み、導電布12が導電シート14と接触することにより、接触検知を行っている。一方、非柔軟体26が接触検知センサ11に接触するときは、非柔軟体26が絶縁スペーサ13(絶縁線20,21)に応じて変形しないことを利用して、絶縁線20,21のみが導電シート14内に沈み込み、導電布12が導電シート14と接触することにより、接触検知を行っている。よって、第1実施形態により、非柔軟体26に比べて柔軟体25を小さな力で検出することが可能となり、非柔軟体26に比べて柔軟体25を高感度で検出することができる。
【0058】
(第2実施形態)
図7は、本発明の第2実施形態における、断面菱形の絶縁線42を有する接触検知センサ41の断面図である。絶縁線42は、第1実施形態の絶縁線20,21に代わるものである。絶縁線42以外の第2実施形態の他の構造は、第1実施形態と同一である。図7に示すように、第2実施形態の絶縁線42は、導電布12に対して先端(導電布12側の先端)を細くした断面形状を有する構成である。
【0059】
絶縁線42は、その断面菱形の形状により、導電布12を介して柔軟体25に沈み込み易くなるので、接触検知センサ41の感度を高めることができる。なお、先端を細くした断面形状としては、菱形の絶縁線42の他に、円弧、三角形等の形状がある。ただし、断面菱形の場合は、柔軟体25として人体を考えと、人体に怪我などをさせる可能性があるため、導電布12の材質又は厚みなどを適宜選択する必要がある。
【0060】
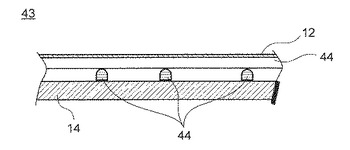
図8は、第2実施形態の変形例における、断面D形の絶縁線44を有する接触検知センサ43の断面図である。絶縁線44は、第1実施形態の絶縁線20,21に代わるものである。絶縁線44以外の図8の第2実施形態の変形例の他の構造は、第1実施形態と同一である。図8に示すように、絶縁線44は、導電布12に対して先端を円弧にし、絶縁シート14に対して先端を平坦にしたD形の断面形状を有する構成にしてもよい。
【0061】
絶縁線44は、導電布12側の先端を円弧にしたことで導電布12を介して柔軟体25に絶縁線44が沈み込み易くなり、導電シート14側の先端を平坦にしたことで導電シート14に対して絶縁線44が沈み込み難くなる。そのため、非柔軟体26に対する接触検知の感度を低くし、柔軟体25に対する接触検知の感度を相対的に高くすることができる。さらに、導電布12側の先端が円弧であるため、第1実施形態と同じく、柔軟体25として人体を考えた場合でも、人体に怪我などをさせる可能性は低い。
【0062】
(第3実施形態)
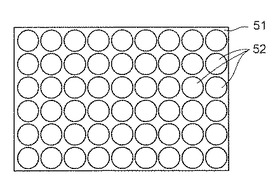
図9は、本発明の第3実施形態における接触検知センサの、穴あき型の四角形の薄い絶縁シートで構成される絶縁スペーサ51の上面図である。第3実施形態の絶縁スペーサ51は、第1実施形態の絶縁スペーサ13に代わるものである。絶縁スペーサ51以外の第3実施形態の他の構造は、第1実施形態と同一である。図9に示すように、絶縁スペーサ51は、同一内径の丸い形状の開口部52を、複数、等間隔で縦横に列を形成するように有する構成である。接触検知センサは、絶縁スペーサ51を用いても、柔軟体25が接触したことを高い感度で検知することができる。ただし、前述の「0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6」という関係を満たすためには、開口部52間の距離を短くする必要があり、破断しない強度を保つように絶縁スペーサ51の材質を選択する必要がある。
【0063】
(第4実施形態)
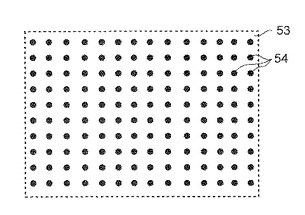
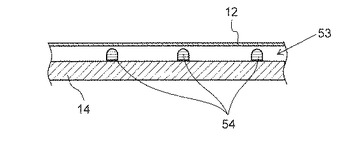
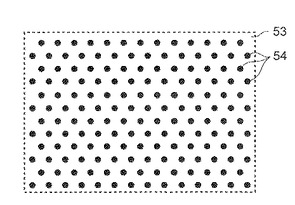
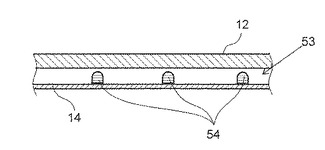
図10Aは、第4実施形態における接触検知センサの、ドット型の絶縁スペーサ53の上面図である。図10Bは、第4実施形態における接触検知センサの、ドット型の絶縁スペーサ53の一部断面図である。
【0064】
第4実施形態の変形例の絶縁スペーサ53は、第1実施形態の絶縁スペーサ13に代わるものである。絶縁スペーサ53以外の第4実施形態の変形例の他の構造は、第1実施形態と同一である。図10A及び図10Bに示すように、絶縁スペーサ53は、複数の大略同一外径の半球状の絶縁片54から構成されるものである。絶縁片54の厚さ(紙面上下方向の長さ)は、1mm程度である。具体的には、半球状の絶縁片54を、その平面を絶縁シート14側に配置して等間隔に格子状に絶縁シート14に貼付けることで、絶縁スペーサ53を構成している。この場合、感帯領域(開口部)は、絶縁片54間の空間であり、不感帯領域は、絶縁片54により構成される領域である。そのため、導電布12が絶縁片54間の隙間に入り込み、絶縁片54が導電シート14に沈み込むことで、接触を検知する。接触検知センサは、絶縁スペーサ53を用いても、柔軟体25が接触したことを高い感度で検知することができる。第4実施形態の接触検知センサは、第1実施形態〜第3実施形態のように、絶縁スペーサとして別シートを用いることなく、絶縁シート14に絶縁片54を貼り付けて構成することができるので、安価かつ簡便に製造することができる。なお、第1実施形態〜第3実施形態では絶縁スペーサを介して固定していた絶縁布12と絶縁シート14は、この第4実施形態では絶縁布12と絶縁シート14を直接固定している。
【0065】
また、絶縁片54間の間隔を変更することで、絶縁シート14の曲げ易さ、又は、検知の感度を変えることができる。絶縁片54間の間隔を変更した第4実施形態の第1変形例を、図10Cに示す。図10Cに示すように絶縁片54を千鳥状に配置することで、図10Aのように格子状の配置で感度が高すぎる場合に、図10Aの配置よりも感度を低下させ、適当な感度で接触を検知することができる。
【0066】
また、絶縁片54の配置を部位ごとに適宜変更することで、部位ごとに感度の異なる接触検知センサを製造することも可能である。具体的には、例えば、接触検知センサの一部は絶縁片54の間隔を短くして感度を低くし、その他の部位は絶縁片54の間隔を長くして感度を高くすることで、一部の感度が低い接触検知センサも実現可能である。
【0067】
また、図10Dの第2変形例に示すように、絶縁シート14の厚さを絶縁布12の厚さよりも薄くすることで、柔軟体25に対する感度を低下させることもできる。すなわち、図10Bに示す場合と比べて、柔軟体25に対する感度と非柔軟体26に対する感度をほぼ等しい感度とすることもできる。図10Bに示すように、絶縁シート14の厚さが絶縁布12の厚さよりも厚い場合は、柔軟体25に対する感度は、非柔軟体26よりもかなり高くなる。だが、図10Dに示すように、絶縁シート14の厚さが絶縁布12の厚さよりも薄い場合は、柔軟体25に対する感度は、非柔軟体26より僅かに高い程度に設定することができる。
【0068】
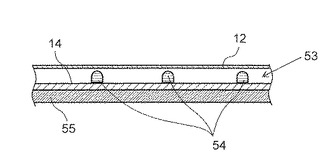
また、図10Eの第3変形例に示すように、図10Bにおける絶縁シート14を、薄い絶縁シート14とスポンジ55で構成することも可能である。絶縁シート14は高価であるため、このようにして薄い絶縁シート14とスポンジ55を組み合わせて用いることで、接触検知センサの価格を低くすることができる。なお、ここで、図10Dの第2変形例において、図10Bの絶縁布12を、薄い絶縁布12とスポンジ55で構成することも可能である。
【0069】
接触検知センサの配置又は目的などにより、この接触検知センサに求められる機能も変わる。そのため、これら図10B〜図10Eに示す変形例を、適宜、組み合わせることで、所望の性能を実現することが好ましい。
【0070】
ただし、前述の「0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6」という関係を満たすためには、絶縁片54の配置が重要となるので、絶縁片54の貼付けを精度良く行う必要がある。
【0071】
(第5実施形態)
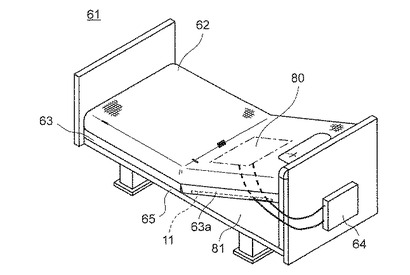
図11は、本発明の第5実施形態における介護用ベッド61の斜視図であり、図12は、第5実施形態における介護用ベッド61の背ボトムの背面図である。
【0072】
図11及び図12に示すように、第5実施形態の介護用ベッド61は、接触検知センサ11をベッド筐体(ここでは、背ボトム63aの背面)の表面に装着した構成である。
【0073】
介護用ベッド61は、被介護者が横たわるマット62と、マット62を支えるボトム部63と、ボトム部63の一部である背ボトム63aの傾きを変える駆動部80と、駆動部80の制御を行う制御部64と、ボトム部63を下方で支えるベッドフレーム65を有する。駆動部80は、正逆回転モータと、モータの回転軸に連結された公知の背ボトム傾斜機構などを備えて構成されている。
【0074】
介護用ベッド61は、制御部64に接続したリモコン(図示せず)を操作することで、背ボトム63aを駆動部80で動かしてマット62の背上げ及び背下げを行なうことができる。例えば、食事を行なう場合、介護者は、図11に示すように背ボトム63aを起こして、介護用ベッド61を背上げ状態とすることができる。また、寝る場合、背ボトム63aを背下げして、マット62を水平で傾きのないフラット状態とすることができる。
【0075】
しかし、背ボトム63aを背下げして、背上げ状態よりフラット状態に変形させると、背ボトム63aとベッドフレーム65との間の空間81に、何かを挟み込む可能性がある。例えば、被介護者又は介護者がベッド近傍にいる状態で背ボトム63aが動くため、不注意により被介護者又は介護者の指又は手が、背ボトム63aとベッドフレーム65との間の空間81に入り、挟み込んでしまう可能性がある。
【0076】
第5実施形態の介護用ベッド61は、背ボトム63aの背面(図11の下面)の表面に接触検知センサ11を装着しているので、背ボトム63aの背面に人体が接触したことを接触検知センサ11で検知することができる。そして、接触検知センサ11が人体の接触を検知すると、接触検知センサ11に接続された制御部64は、駆動部80の動作を停止させる。
【0077】
よって、介護用ベッド61は、人体の一部が背ボトム63aとベッドフレーム65との間の空間81に入っても、接触検知センサ11が人体の接触を検知して駆動部80を停止させるので、安全性が高い介護用ベッドとなっている。
【0078】
なお、介護用ベッド61は、駆動装置の一例として説明したが、駆動装置としては、アーム部を動かす産業用ロボット等であってもよい。
【0079】
なお、上記様々な実施形態又は変型例のうちの任意の実施形態又は変型例を適宜組み合わせることにより、それぞれの有する効果を奏するようにすることができる。
【産業上の利用可能性】
【0080】
本発明にかかる接触検知センサは、人体のような柔軟体が接触したことを検知するので、接触検知センサとして有用であるほか、介護ベッド又は産業用ロボットなどの駆動装置の駆動制御にも有用である。
【符号の説明】
【0081】
11,41,43 接触検知センサ
12 導電布
13,51,53 絶縁スペーサ
14 導電シート
15 接触検知回路
20,21,42,44 絶縁線
22,52 開口部
25 柔軟体
26 非柔軟体
27 第1保持部
28 第2保持部
29 格子エリア
30a,30b 固着部
54 絶縁片
61 介護用ベッド
62 マット
63 ボトム部
63a 背ボトム
64 制御部
65 ベッドフレーム
【技術分野】
【0001】
本発明は、接触を検知する接触検知センサ、駆動装置、及び、介護用ベッドに関する。
【背景技術】
【0002】
病院施設又は介護施設等では、床部の背もたれを電動機で起し上げることができる介護用ベッドが広く普及している。このような介護用ベッドにおいて、背もたれを起した背上げ姿勢からフラット姿勢へと変形させるとき、背もたれの下面とベッドフレームとの間に人体又は異物を挟んでしまう挟み込みが発生する場合がある。この挟み込みを検知するための安全対策が、検討されている。
【0003】
安全対策の一つとして、シート状の接触検知センサを背もたれの背面全体に貼り付けて、人体又は異物の挟み込みを接触検知センサで検知し、背もたれを停止させる方法がある。
【0004】
また、安全対策の一つとして、介護用ベッドではないが、産業用ロボットの外周側面に板状の接触検知センサを取り付けて、その接触検知センサに何かが触れると、その産業用ロボットの動作を停止させる方法がある(例えば、特許文献1参照)。
【0005】
図13は、従来の接触検知センサ1の斜視図である。従来の接触検知センサ1は、多数の孔2を有する長方形シート状の絶縁スペーサ3と、絶縁スペーサ3を挟んで導電面を向かい合わせて配置された2枚の長方形シート状の導電シート4、5と、導電シート4の外面を覆う絶縁体の長方形シート状の柔軟シート6とを有する。
【0006】
また、導電シート4、5の両端には、導線7、8が接続されている。導線7、8は、電流等の検知回路を通じて、直流電源と接続されている。このような構成の接触検知センサ1は、柔軟シート6に触れると電流等が変化するため、接触の検知が可能である。
【0007】
図14は、従来の接触検知センサ1の接触時の断面図である。接触検知センサ1の接触検知の動作について説明する。
【0008】
接触検知センサ1は、例えば、産業用ロボットの側面9に取り付けられている。そして、柔軟シート6の上から押圧力Fが作用すると、柔軟シート6及び導電シート4が押圧力Fによって変形し、導電シート4が孔2の内側へ入り込む。孔2の内側へ入り込んだ導電シート4は、導電シート5に密着する。その結果、導線7と導線8が接続されて電流等が変化することにより、検知回路は、接触検知センサ1の接触の有無を判定することができる。
【0009】
このような接触検知センサ1を用いることで、広い範囲で外部からの接触を検知することができる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−102719号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、従来の接触検知センサを、例えば介護用ベッドの挟み込み検知に用いると、接触検知センサは、人体と異物とを区別せずに、所定以上の力が加わった場合に挟み込みを検知する。ここで、人体に危害を与えないようにするために、接触検知センサの感度を高く設定した場合は、異物に対しても同じ感度で接触を検知することになる。その結果、挟み込みを検知する必要が無い場合でも、挟み込みを検知してしまう。例えば介護用ベッドにおいて、挟み込みを検知するとベッドの背もたれの駆動を停止する制御とした場合、接触検知センサの感度を高く設定すると、頻繁に背もたれの駆動が停止して、利便性が低下する。また、誤検知を少なくするため、挟み込み検知の感度を低くした場合は、人体に対する感度も低下し、人体を挟み込んだ際に危害が加わる可能性が高くなる。
【0012】
すなわち、従来の接触検知センサでは、人体のような柔軟体と硬い異物とを区別できずに、同様の力が加わると、同じように接触を検知する。
【0013】
本発明は、上記従来の課題を解決するためのものであり、人体のような柔軟体が接触したことを高感度で検知する接触検知センサ、駆動装置、及び、介護用ベッドを提供することを目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するために、本発明は以下のように構成する。
【0015】
本発明の1つの態様によれば、複数の開口部を有する絶縁スペーサと、前記絶縁スペーサの一方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第1導電シートと、前記絶縁スペーサの他方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第2導電シートと、を備えて、前記絶縁スペーサの前記開口部を介して、前記第1導電シートと前記第2導電シートとが電気的に接触することにより、接触を検知する接触検知センサを提供する。
【0016】
本発明の別の態様によれば、前記態様のいずれか1つに記載の前記接触検知センサを筐体の表面に設けて、前記接触検知センサでの接触検知により駆動制御される駆動装置を提供する。
【0017】
本発明の別の態様によれば、前記態様に記載の接触検知センサを有する介護用ベッドを提供する。
【発明の効果】
【0018】
本発明は、柔軟体が接触したことを高感度で検知する接触検知センサ、接触検知センサを使用する駆動装置、及び、介護用ベッドを提供することができる。
【図面の簡単な説明】
【0019】
【図1A】図1Aは、本発明の第1実施形態における接触検知センサの斜視図であり、
【図1B】図1Bは、第1実施形態における接触検知センサの非接触時の図1AのA−A線の一部断面図であり、
【図1C】図1Cは、第1実施形態における接触検知センサの柔軟体が接触したときの図1AのA−A線の一部断面図であり、
【図2】図2は、第1実施形態における接触検知センサの柔軟体が接触したときの部分拡大断面図であり、
【図3】図3は、第1実施形態における接触検知センサに非柔軟体が接触したときの一部断面図であり、
【図4】図4は、第1実施形態における接触検知センサの分解斜視図であり、
【図5A】図5Aは、第1実施形態における接触検知センサを平面の筐体に装着した場合の断面図であり、
【図5B】図5Bは、第1実施形態における接触検知センサを曲面の筐体に装着した場合の断面図であり、
【図6】図6は、第1実施形態における接触検知センサに柔軟体が接触したときの断面図であり、
【図7】図7は、本発明の第2実施形態における菱形の絶縁線を有する接触検知センサの断面図であり、
【図8】図8は、第2実施形態におけるD形の絶縁線を有する接触検知センサの断面図であり、
【図9】図9は、本発明の第3実施形態における接触検知センサの穴あき型の絶縁スペーサの上面図であり、
【図10A】図10Aは、第4実施形態におけるドット型の絶縁スペーサの上面図であり、
【図10B】図10Bは、第4実施形態におけるドット型の絶縁スペーサの一部断面図であり、
【図10C】図10Cは、第4実施形態の第1変形例におけるドット型の絶縁スペーサの上面図であり、
【図10D】図10Dは、第4実施形態の第2変形例におけるドット型の絶縁スペーサの一部断面図であり、
【図10E】図10Eは、第4実施形態の第3変形例におけるドット型の絶縁スペーサの一部断面図であり、
【図11】図11は、本発明の第5実施形態における介護用ベッドの斜視図であり、
【図12】図12は、第5実施形態における介護用ベッドの背ボトムの背面図であり、
【図13】図13は、従来の接触検知センサの分解斜視図であり、
【図14】図14は、従来の接触検知センサの接触時の断面図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下の説明において、同じ構成要素には同じ符号を付しており、説明を省略する場合もある。また、図面は理解しやすくするために、それぞれの構成要素を主体に模式的に示している。
【0021】
(第1実施形態)
図1A,図1B,図1Cは、本発明の第1実施形態における接触検知センサ11の斜視図と一部断面図である。図1Aは接触検知センサ11の斜視図であり、図1Bは非接触時の図1AのA−A線の一部断面図であり、図1Cは柔軟体25が接触したときの図1AのA−A線の一部断面図である。
【0022】
図1Aに示すように、第1実施形態の接触検知センサ11は、多数の開口部22を有する絶縁スペーサ13と、この絶縁スペーサ13を挟んで配置された導電布12と導電シート14とを備える構成である。第1導電シートの一例である導電布12は、絶縁スペーサ13の一方の面(例えば、図1Aの上面)に接している。第2導電シートの一例である導電シート14は、絶縁スペーサ13の他方の面(例えば、図1Aの下面)に接している。なお、導電布12と導電シート14とは、それぞれ、導電性を有する。
【0023】
導電布12は、有機繊維の表面に極めて薄い金属メッキを加工した織物である。詳しくは後述するが、第1実施形態の導電布12は、絶縁スペーサ13の表面の凹凸に沿った変形が必要であるため、可能な限り薄いものが望ましい。具体的には、0.1mm以下であることが望ましい。また、第1実施形態の導電布12は、導電シート14との接触によって生ずる電流又は抵抗の変化を顕著にするために、その抵抗値は低いものが望ましい。本第1実施形態では、導電布12の一例として、厚みが0.09mm程度で、抵抗が0.05Ω/sq程度で、材料が銅を含浸したPET織物のものを使用した。 絶縁スペーサ13は、複数の絶縁線20,21を格子状に組み合わせて構成されている。絶縁スペーサ13を構成する部材(絶縁線20,21)は、導電布12及び導電シート14より剛性の高い材料を用いることが望ましい。複数の絶縁線20及び複数の絶縁線21は、例えば、それぞれ等間隔に配置されている。一例として、図1A〜図1Cでは、各絶縁線21と各絶縁線20とが互いに直交するようにして、絶縁スペーサ13を構成している。具体的には、等間隔かつ平行に配置した複数の絶縁線21の上側に、等間隔かつ平行に配置した複数の絶縁線20を、固定することなく、載置して、絶縁スペーサ13を構成している。第1実施形態では、絶縁スペーサ13の一例として、直径が0.9mm程度のポリエステルを使用した。
【0024】
導電シート14は、シート面に外部より力が加わると、厚さ方向(図1B,図1Cの上下方向)に自在に変形可能な厚みを持たせた部材である。詳しくは後述するが、第1実施形態では、絶縁スペーサ13の少なくとも一部の絶縁線20,21が導電シート14内に沈み込む(めり込む)必要がある。そのため、導電シート14は、導電シート14に力が加わった場合に、容易に変形可能な材料を用いる必要がある。また、第1実施形態では、図3に示す非柔軟体26の接触を検知するために、導電シート14の厚さは、絶縁スペーサ13の厚さ以上とする必要がある。導電シート14の材質としては、導電性を有し、厚み方向に柔軟性を有する部材が望ましい。導電シート14の具体的な材質としては、導電性スポンジ又は導電性ゴム等が望ましい。第1実施形態では、導電シート14の一例として、厚みが3.4mm程度であり、抵抗が0.05Ω/sq程度である導電スポンジを使用した。
【0025】
図1Bに示すように、第1実施形態の接触検知センサ11では、接触検知センサ11に何も接触していないとき(柔軟体25が接触検知センサ11に接触していないとき)は、絶縁スペーサ13の存在により、全ての領域において導電布12と導電シート14とが全く接触していない。
【0026】
その後、図1Cに示すように、例えば、接触検知センサ11に柔軟体25の一例である人体の一部が接触すると、導電布12と導電シート14とが部分的に接触する。第1実施形態では、接触検知センサ11の導電布12と導電シート14とが接触することで生ずる電流又は抵抗の変化を接触検知回路15で検出することで、接触検知センサ11に柔軟体25が接触したことを検知する。
【0027】
図2は、第1実施形態における柔軟体25が接触検知センサ11へ接触したときの接触検知センサ11の部分拡大断面図である。
【0028】
柔軟体25が所定以上の力で接触検知センサ11に接触すると、絶縁線20,21は、柔軟体25と導電シート14のどちらにも沈み込む(簡略化するため、図2では、絶縁線21のみが柔軟体25と導電シート14とに沈み込んだ状態を図示している。)。このとき、導電布12は、絶縁線20,21の外形に沿って変形し、導電布12と導電シート14とが接触する。ここで、導電布12には、絶縁線20,21に沿うための柔軟性が必要である。また、絶縁線20,21としては、柔軟体25及び導電シート14よりも剛性の高い材質を用いる必要がある。第1実施形態では、絶縁線20,21としてポリエステルを使用しているので、導電シート14として使用している導電スポンジよりも、充分に剛性が高い。
【0029】
また、絶縁線20,21の断面形状は円形であることが望ましい。絶縁線20,21の断面形状として円形が望ましい理由について説明する。絶縁線20,21の断面の中心より図2の矢印B又は矢印Cの方向に細くなる形状であれば、絶縁線20,21は柔軟体25又は導電シート14に沈み込み易くなり、本発明で目的とする機能を実現することができる。しかし、例えば矢印Bの方向に尖った形状では、柔軟体25が人体の一部である場合、その人に痛みを与える可能性がある。このような問題を解決するために、第1実施形態においては、絶縁線20,21の断面形状は円形が最適である。
【0030】
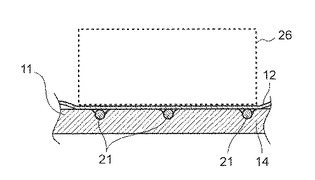
図3は、第1実施形態における接触検知センサ11に非柔軟体26が接触したときの接触検知センサ11の断面図である。ここで、非柔軟体26とは、柔軟体25よりも硬く、絶縁線20,21よりも硬い。すなわち、非柔軟体26は、絶縁線20,21が沈み込まない物体を意味している。例えば、非柔軟体26としては、金属材料、樹脂材料のものが考えられる。
【0031】
第1実施形態では、前述のように、導電シート14の厚みを、絶縁スペーサ13の厚み以上に厚くしている。これにより、非柔軟体26が所定以上の力で導電布12を介して絶縁線20,21に接触すると、絶縁線20,21が導電シート14内に完全に沈み込む(簡略化するため、図3では、絶縁線21のみが導電シート14に沈み込んだ状態を図示している。)。この絶縁線20,21の沈み込みによって、導電布12と導電シート14とが接触するため、非柔軟体26の接触を検知することができる。
【0032】
図3に示すように、非柔軟体26が接触検知センサ11に接触した場合、接触検知センサ11で接触を検知するためには、絶縁線20,21が導電シート14内に完全に沈み込んで、導電布12と導電シート14とが接触する必要がある。そのため、図2に示した柔軟体25の場合に比べて、図3に示した非柔軟体26の場合は、接触検知に大きな力を必要とする。つまり、第1実施形態の接触検知センサ11は、柔軟体25が絶縁線20,21に応じて変形することを利用して、非柔軟体26に比べて柔軟体25を高感度に検出することを可能とする。よって、第1実施形態の接触検知センサ11を用いることで、柔軟体25の一例である人体の接触を非柔軟体26に比べて高感度で検知するとともに、誤検知の少ない接触検知センサを実現することができる。
【0033】
ここで、以上に説明した、非柔軟体26に比べて柔軟体25を高感度に検出することができる内容について、数式を用いて説明する。以下の説明では、簡略化するため、絶縁線として絶縁線21のみを考慮して、絶縁線20を省略している。
【0034】
図2に示すように、絶縁線21が柔軟体25に沈み込む変形量をxfとし、絶縁線21が導電シート14に沈み込む変形量をxsとする。また、柔軟体25の弾性係数をkfとし、導電シート14の弾性係数をksとし、接触検知センサ11と柔軟体25との間で発生している力をF(xf+xs)とする。すると、以下の(式1)が成り立つ。
【0035】
【数1】
ここで、図3のように、柔軟体25の代わりに非柔軟体26が接触するとき、xfが0となり、kfが無限大となるため、(式1)は以下の(式2)になる。ここで、F(xs)は、接触検知センサ11と非柔軟体26との間で発生している力である。
【0036】
【数2】
【0037】
導電布12と導電シート14とが接触するためには、変形量の合計が下側(導電シート側)の絶縁線21の厚みdに等しくなればよい。よって、導電布12と導電シート14とが接触するときの力F(d)は、柔軟体25の場合は以下の(式3)となり、非柔軟体26の場合は以下の(式4)となる。
【0038】
【数3】
【0039】
【数4】
(式4)の弾性係数は、導電シート14の弾性係数ksである。それに対して、(式3)の弾性係数は、導電シート14と柔軟体25とを直列に接続した場合の合成弾性係数(1/{1/(kf)+1/(ks)})となっている。すなわち、これらの式から、非柔軟体26の(式4)の弾性係数よりも、柔軟体25の(式3)の弾性係数が低いことがわかる。よって、同じ量を変形させる場合、柔軟体25が接触した方が、非柔軟体26が接触するより、弱い力で変形することがわかる。そのため、第1実施形態の接触検知センサ11は、非柔軟体26よりも柔軟体25に高感度で反応するセンサとなる。よって、第1実施形態の接触検知センサ11は、1つの接触検知センサで、人体(柔軟体25)の接触と硬い異物(非柔軟体26)の接触とを、異なる感度で検知することができる。
【0040】
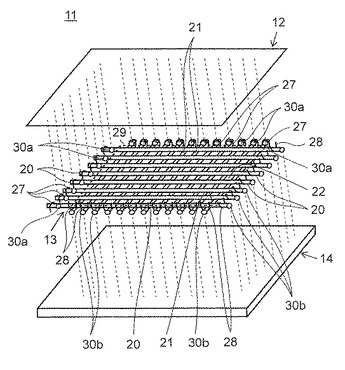
図4は、第1実施形態における接触検知センサ11の分解斜視図である。
【0041】
図4に示すように、絶縁スペーサ13は、等間隔にかつ平行に並べた複数の絶縁線21の上に、等間隔にかつ平行に並べた複数の絶縁線20を、格子状となるように載せた構成である。このような構成により、絶縁スペーサ13の面積を最小とすることができ、センサの不感帯領域が最小となる。また、不感帯領域である絶縁スペーサ13の絶縁線20,21の幅は一定であるため、絶縁線20,21は、柔軟体25及び導電シート14に均一に沈み込む。そのため、第1実施形態の接触検知センサ11は、不感帯領域における接触検知感度を均一に近づけることが可能である。
【0042】
なお、絶縁線20,21の線径又は材質又は配置間隔によって、接触検知センサ11の感度は変化する。接触検知センサ11としては、人体を挟み込んだ際に怪我をさせない程度の感度で検知する必要がある。そのため、第1実施形態では、一例として、線径が直径0.9mm程度のポリエステルの繊維で構成される絶縁線20,21を、5mm程度の間隔に配置した絶縁スペーサ13を使用している。
【0043】
ここで、発明者らは、非柔軟体の感度と比較して柔軟体の感度を高くするために、種々の条件で実験を行い、感帯領域(絶縁線20,21間の開口部)の面積と不感帯領域の面積との関係が「0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6」が好ましいことを見出した。たとえば、上述の条件(絶縁線20,21の線径が直径0.9mmで、間隔が5mm)では、「52/(0.45+5+0.45)2=0.72」となり、この関係を満たしている。この関係を満たすことで、非柔軟体の感度と比較して柔軟体の感度を高くすることが可能であると考える。
【0044】
ここで、絶縁線20は、第2保持部28と固着部30aとによって保持されている。具体的には、第2保持部28は、絶縁線20の片端である第1端部(例えば図4の右端部)をそれらの導電布12に対する摺動を許容しつつ導電布12に保持する。固着部30aは、絶縁線20のもう一方の片端である第2端部(例えば図4の左端部)を導電布12に固定する。また、絶縁線21は、第2保持部28と固着部30aとによって保持されている。具体的には、第2保持部28は、絶縁線21の片端である第1端部(例えば図4の下端部)をそれらの導電布12に対する摺動を許容しつつ導電布12に保持する。固着部30aは、絶縁線21のもう一方の片端である第2端部(例えば図4の上端部)を導電布12に固定する。
【0045】
同様に、絶縁線20は、第1保持部27と固着部30bとによって保持されている。具体的には、第1保持部27は、絶縁線20の一端である第2端部(例えば図4の左端部)をそれらの導電シート14に対する摺動を許容しつつ導電シート14に保持する。固着部30bは、絶縁線20の他端である第1端部(例えば図4の右端部)を導電シート14に固定する。また、絶縁線21は、第1保持部27と固着部30bとによって保持されている。具体的には、第1保持部27は、絶縁線21の一端である第2端部(例えば図4の奥側の端部)をそれらの導電シート14に対する摺動を許容しつつ導電シート14に保持する。固着部30bは、絶縁線21の他端である第1端部(例えば図4の手前側の端部)を導電シート14に固定する。
【0046】
すなわち、第2保持部28は導電布12に設けられ、第1保持部27は導電シート14に設けられている。
【0047】
なお、導電布12と絶縁線20,21の第1端部とは、接着材により接着して固定している。固着部30aは、その接着材が固化した部分である。同様に、導電シート14と絶縁線20,21の第2端部とは、接着材により接着して固定している。固着部30bは、その接着材が固化した部分である。
【0048】
第1実施形態の第1保持部27は、一例として、繊維より構成される糸でU字形を作り、このU字形の中に絶縁線20又は21を通した上で導電シート14に縫い付けたものを使用している。同様に、第1実施形態の第2保持部28は、繊維より構成される糸でU字形を作り、このU字形の中に絶縁線20又は21を通した上で導電布12に縫い付けたものを使用している。
【0049】
図5A及び図5Bは、第1実施形態における接触検知センサ11の断面図である。図5Aは、平面の筐体39に装着した場合の断面図であり、図5Bは、曲面の筐体40に装着した場合の断面図である。
【0050】
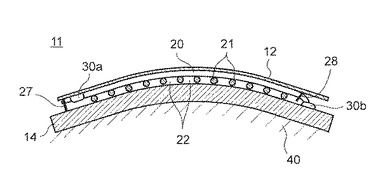
図5A及び図5Bを用いて、接触検知センサ11を曲面の筐体40に装着可能な理由について説明する。
【0051】
接触検知センサ11における絶縁線20,21は、導電布12に対して、それぞれの第2端部を固着部30aで固定している。また、接触検知センサ11における絶縁線20,21は、導電シート14に対して、それぞれの第1端部を固着部30bで固定している。
【0052】
図5Bに示すように、導電シート14を凸形状(図5Bの上向きの凸形状)に曲げた際、絶縁線20,21の片端(固着部側)は導電シート14に対して固定端となっているが、他端(保持部側)は導電シート14に対して開放端となっている。そのため、絶縁線20,21は、導電シート14の上を滑り、導電シート14に沿って曲げられる。同様に、絶縁線20,21の片端(固着部側)は導電布12に対して固定端となっているが、絶縁線20,21の他端(保持部側)は開放端となっている。そのため、導電布12は、絶縁線20,21上を滑り、絶縁線20,21に沿って曲げられる。また、絶縁スペーサ13は、絶縁線21の上に絶縁線20を載せただけであり、絶縁線20と絶縁線21とが交差する部分は固定(接着)されていない。そのため、絶縁線20は、絶縁線21の上を滑ることができる。このような構成の絶縁スペーサ13を曲げた場合、積層方向に力が発生しないので、導電布12と導電シート14とは一定の距離を保ち、接触することがない。すなわち、このような絶縁スペーサ13を曲げただけでは、導電布12と導電シート14とは接触せず、第1実施形態の接触検知センサ11として接触検知することが可能である。そのため、第1実施形態の接触検知センサ11は、曲面の筐体40に装着可能である。
【0053】
図6は、第1実施形態において、柔軟体25が接触検知センサ11に接触したときの接触検知センサ11の断面図である。
【0054】
前述のように、第1実施形態の接触検知センサ11は、絶縁線21の片端である第2端部を導電布12に固着部30aで固定し、第1端部を第2保持部28で摺動させながら保持している。そのため、第1実施形態の接触検知センサ11は、導電布12を絶縁スペーサ13上で滑らせることができる。
【0055】
よって、図6に示すように、柔軟体25が接触検知センサ11に接触した際、接触検知センサ11は、柔軟体25が導電布12を介して絶縁線21へ沈み込む。このとき、導電布12は、絶縁線21の第1端部を第2保持部28で摺動可能に保持しているので、第1端部は開放端となり、絶縁線21に対して導電布12は動くことができる。よって、接触検知センサ11に接触が発生しても、導電布12の張力は高くならず、絶縁線20,21に導電布12を沿わせ易い。そのため、第1実施形態の接触検知センサ11は、柔軟体25を高感度に検出することができる。
【0056】
逆に、第1実施形態とは異なり、導電布12が絶縁線20,21の両端に固定された状態について考える。導電布12が絶縁線20,21の両端に固体された状態において接触検知センサ11が曲げられた場合、導電シート14が絶縁線20,21側に押されて導電布12と接触し、勝手に接触検知することがある。すなわち、導電布12が絶縁線20,21の両端に固体された状態において接触検知センサ11が曲げられた場合、柔軟体25又は非柔軟体26が接触していないにも関わらず、接触を検知することがある。そのため、導電布12が絶縁線20,21の両端に固体された状態は、湾曲した部位を有する対象物に接触検知センサが貼り付けて行う場合において、接触検知には適さない。
【0057】
第1実施形態によれば、柔軟体25が接触検知センサ11に接触するときは、柔軟体25が絶縁スペーサ13(絶縁線20,21)に応じて変形することを利用して、柔軟体25と共に導電布12が絶縁スペーサ13の開口部22内に入り込み、導電布12が導電シート14と接触することにより、接触検知を行っている。一方、非柔軟体26が接触検知センサ11に接触するときは、非柔軟体26が絶縁スペーサ13(絶縁線20,21)に応じて変形しないことを利用して、絶縁線20,21のみが導電シート14内に沈み込み、導電布12が導電シート14と接触することにより、接触検知を行っている。よって、第1実施形態により、非柔軟体26に比べて柔軟体25を小さな力で検出することが可能となり、非柔軟体26に比べて柔軟体25を高感度で検出することができる。
【0058】
(第2実施形態)
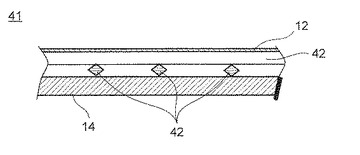
図7は、本発明の第2実施形態における、断面菱形の絶縁線42を有する接触検知センサ41の断面図である。絶縁線42は、第1実施形態の絶縁線20,21に代わるものである。絶縁線42以外の第2実施形態の他の構造は、第1実施形態と同一である。図7に示すように、第2実施形態の絶縁線42は、導電布12に対して先端(導電布12側の先端)を細くした断面形状を有する構成である。
【0059】
絶縁線42は、その断面菱形の形状により、導電布12を介して柔軟体25に沈み込み易くなるので、接触検知センサ41の感度を高めることができる。なお、先端を細くした断面形状としては、菱形の絶縁線42の他に、円弧、三角形等の形状がある。ただし、断面菱形の場合は、柔軟体25として人体を考えと、人体に怪我などをさせる可能性があるため、導電布12の材質又は厚みなどを適宜選択する必要がある。
【0060】
図8は、第2実施形態の変形例における、断面D形の絶縁線44を有する接触検知センサ43の断面図である。絶縁線44は、第1実施形態の絶縁線20,21に代わるものである。絶縁線44以外の図8の第2実施形態の変形例の他の構造は、第1実施形態と同一である。図8に示すように、絶縁線44は、導電布12に対して先端を円弧にし、絶縁シート14に対して先端を平坦にしたD形の断面形状を有する構成にしてもよい。
【0061】
絶縁線44は、導電布12側の先端を円弧にしたことで導電布12を介して柔軟体25に絶縁線44が沈み込み易くなり、導電シート14側の先端を平坦にしたことで導電シート14に対して絶縁線44が沈み込み難くなる。そのため、非柔軟体26に対する接触検知の感度を低くし、柔軟体25に対する接触検知の感度を相対的に高くすることができる。さらに、導電布12側の先端が円弧であるため、第1実施形態と同じく、柔軟体25として人体を考えた場合でも、人体に怪我などをさせる可能性は低い。
【0062】
(第3実施形態)
図9は、本発明の第3実施形態における接触検知センサの、穴あき型の四角形の薄い絶縁シートで構成される絶縁スペーサ51の上面図である。第3実施形態の絶縁スペーサ51は、第1実施形態の絶縁スペーサ13に代わるものである。絶縁スペーサ51以外の第3実施形態の他の構造は、第1実施形態と同一である。図9に示すように、絶縁スペーサ51は、同一内径の丸い形状の開口部52を、複数、等間隔で縦横に列を形成するように有する構成である。接触検知センサは、絶縁スペーサ51を用いても、柔軟体25が接触したことを高い感度で検知することができる。ただし、前述の「0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6」という関係を満たすためには、開口部52間の距離を短くする必要があり、破断しない強度を保つように絶縁スペーサ51の材質を選択する必要がある。
【0063】
(第4実施形態)
図10Aは、第4実施形態における接触検知センサの、ドット型の絶縁スペーサ53の上面図である。図10Bは、第4実施形態における接触検知センサの、ドット型の絶縁スペーサ53の一部断面図である。
【0064】
第4実施形態の変形例の絶縁スペーサ53は、第1実施形態の絶縁スペーサ13に代わるものである。絶縁スペーサ53以外の第4実施形態の変形例の他の構造は、第1実施形態と同一である。図10A及び図10Bに示すように、絶縁スペーサ53は、複数の大略同一外径の半球状の絶縁片54から構成されるものである。絶縁片54の厚さ(紙面上下方向の長さ)は、1mm程度である。具体的には、半球状の絶縁片54を、その平面を絶縁シート14側に配置して等間隔に格子状に絶縁シート14に貼付けることで、絶縁スペーサ53を構成している。この場合、感帯領域(開口部)は、絶縁片54間の空間であり、不感帯領域は、絶縁片54により構成される領域である。そのため、導電布12が絶縁片54間の隙間に入り込み、絶縁片54が導電シート14に沈み込むことで、接触を検知する。接触検知センサは、絶縁スペーサ53を用いても、柔軟体25が接触したことを高い感度で検知することができる。第4実施形態の接触検知センサは、第1実施形態〜第3実施形態のように、絶縁スペーサとして別シートを用いることなく、絶縁シート14に絶縁片54を貼り付けて構成することができるので、安価かつ簡便に製造することができる。なお、第1実施形態〜第3実施形態では絶縁スペーサを介して固定していた絶縁布12と絶縁シート14は、この第4実施形態では絶縁布12と絶縁シート14を直接固定している。
【0065】
また、絶縁片54間の間隔を変更することで、絶縁シート14の曲げ易さ、又は、検知の感度を変えることができる。絶縁片54間の間隔を変更した第4実施形態の第1変形例を、図10Cに示す。図10Cに示すように絶縁片54を千鳥状に配置することで、図10Aのように格子状の配置で感度が高すぎる場合に、図10Aの配置よりも感度を低下させ、適当な感度で接触を検知することができる。
【0066】
また、絶縁片54の配置を部位ごとに適宜変更することで、部位ごとに感度の異なる接触検知センサを製造することも可能である。具体的には、例えば、接触検知センサの一部は絶縁片54の間隔を短くして感度を低くし、その他の部位は絶縁片54の間隔を長くして感度を高くすることで、一部の感度が低い接触検知センサも実現可能である。
【0067】
また、図10Dの第2変形例に示すように、絶縁シート14の厚さを絶縁布12の厚さよりも薄くすることで、柔軟体25に対する感度を低下させることもできる。すなわち、図10Bに示す場合と比べて、柔軟体25に対する感度と非柔軟体26に対する感度をほぼ等しい感度とすることもできる。図10Bに示すように、絶縁シート14の厚さが絶縁布12の厚さよりも厚い場合は、柔軟体25に対する感度は、非柔軟体26よりもかなり高くなる。だが、図10Dに示すように、絶縁シート14の厚さが絶縁布12の厚さよりも薄い場合は、柔軟体25に対する感度は、非柔軟体26より僅かに高い程度に設定することができる。
【0068】
また、図10Eの第3変形例に示すように、図10Bにおける絶縁シート14を、薄い絶縁シート14とスポンジ55で構成することも可能である。絶縁シート14は高価であるため、このようにして薄い絶縁シート14とスポンジ55を組み合わせて用いることで、接触検知センサの価格を低くすることができる。なお、ここで、図10Dの第2変形例において、図10Bの絶縁布12を、薄い絶縁布12とスポンジ55で構成することも可能である。
【0069】
接触検知センサの配置又は目的などにより、この接触検知センサに求められる機能も変わる。そのため、これら図10B〜図10Eに示す変形例を、適宜、組み合わせることで、所望の性能を実現することが好ましい。
【0070】
ただし、前述の「0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6」という関係を満たすためには、絶縁片54の配置が重要となるので、絶縁片54の貼付けを精度良く行う必要がある。
【0071】
(第5実施形態)
図11は、本発明の第5実施形態における介護用ベッド61の斜視図であり、図12は、第5実施形態における介護用ベッド61の背ボトムの背面図である。
【0072】
図11及び図12に示すように、第5実施形態の介護用ベッド61は、接触検知センサ11をベッド筐体(ここでは、背ボトム63aの背面)の表面に装着した構成である。
【0073】
介護用ベッド61は、被介護者が横たわるマット62と、マット62を支えるボトム部63と、ボトム部63の一部である背ボトム63aの傾きを変える駆動部80と、駆動部80の制御を行う制御部64と、ボトム部63を下方で支えるベッドフレーム65を有する。駆動部80は、正逆回転モータと、モータの回転軸に連結された公知の背ボトム傾斜機構などを備えて構成されている。
【0074】
介護用ベッド61は、制御部64に接続したリモコン(図示せず)を操作することで、背ボトム63aを駆動部80で動かしてマット62の背上げ及び背下げを行なうことができる。例えば、食事を行なう場合、介護者は、図11に示すように背ボトム63aを起こして、介護用ベッド61を背上げ状態とすることができる。また、寝る場合、背ボトム63aを背下げして、マット62を水平で傾きのないフラット状態とすることができる。
【0075】
しかし、背ボトム63aを背下げして、背上げ状態よりフラット状態に変形させると、背ボトム63aとベッドフレーム65との間の空間81に、何かを挟み込む可能性がある。例えば、被介護者又は介護者がベッド近傍にいる状態で背ボトム63aが動くため、不注意により被介護者又は介護者の指又は手が、背ボトム63aとベッドフレーム65との間の空間81に入り、挟み込んでしまう可能性がある。
【0076】
第5実施形態の介護用ベッド61は、背ボトム63aの背面(図11の下面)の表面に接触検知センサ11を装着しているので、背ボトム63aの背面に人体が接触したことを接触検知センサ11で検知することができる。そして、接触検知センサ11が人体の接触を検知すると、接触検知センサ11に接続された制御部64は、駆動部80の動作を停止させる。
【0077】
よって、介護用ベッド61は、人体の一部が背ボトム63aとベッドフレーム65との間の空間81に入っても、接触検知センサ11が人体の接触を検知して駆動部80を停止させるので、安全性が高い介護用ベッドとなっている。
【0078】
なお、介護用ベッド61は、駆動装置の一例として説明したが、駆動装置としては、アーム部を動かす産業用ロボット等であってもよい。
【0079】
なお、上記様々な実施形態又は変型例のうちの任意の実施形態又は変型例を適宜組み合わせることにより、それぞれの有する効果を奏するようにすることができる。
【産業上の利用可能性】
【0080】
本発明にかかる接触検知センサは、人体のような柔軟体が接触したことを検知するので、接触検知センサとして有用であるほか、介護ベッド又は産業用ロボットなどの駆動装置の駆動制御にも有用である。
【符号の説明】
【0081】
11,41,43 接触検知センサ
12 導電布
13,51,53 絶縁スペーサ
14 導電シート
15 接触検知回路
20,21,42,44 絶縁線
22,52 開口部
25 柔軟体
26 非柔軟体
27 第1保持部
28 第2保持部
29 格子エリア
30a,30b 固着部
54 絶縁片
61 介護用ベッド
62 マット
63 ボトム部
63a 背ボトム
64 制御部
65 ベッドフレーム
【特許請求の範囲】
【請求項1】
複数の開口部を有する絶縁スペーサと、
前記絶縁スペーサの一方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第1導電シートと、
前記絶縁スペーサの他方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第2導電シートと、を備えて、
前記絶縁スペーサの前記開口部を介して、前記第1導電シートと前記第2導電シートとが電気的に接触することにより、接触を検知する、
接触検知センサ。
【請求項2】
絶縁片が貼り付けられると共に前記絶縁片が沈み込むように変形可能な第2導電シートと、
前記絶縁片間の隙間に入り込むように変形可能な第1導電シートと、
前記絶縁片間の隙間を介して、前記第1導電シートと前記第2導電シートとが電気的に接触することにより、接触を検知する、
接触検知センサ。
【請求項3】
前記第2導電シートは、その厚み方向に柔軟性を有するシートである、
請求項1又は2に記載の接触検知センサ。
【請求項4】
前記第2導電シートの厚みは、前記絶縁スペーサの厚み以上である、
請求項1に記載の接触検知センサ。
【請求項5】
前記開口部により構成される感帯領域の面積と、前記絶縁スペーサにより構成される不感帯領域の面積との関係が、0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6となる、
請求項1に記載の接触検知センサ。
【請求項6】
前記絶縁スペーサは、複数の絶縁線を格子状に組み合わせて形成されたスペーサである、
請求項1に記載の接触検知センサ。
【請求項7】
前記絶縁線は、その片端で前記第1導電シートに固定された第1端部と、その他端で前記第2導電シートに固定された第2端部とを有し、
前記第2導電シートは、前記絶縁線が格子状に組み合わされた格子エリアの外側で、かつ前記第1端部側において、前記絶縁線を摺動させながら保持する第1保持部を有し、
前記第1導電シートは、前記格子エリアの外側で、かつ前記第2端部側において、前記絶縁線を摺動させながら保持する第2保持部を有する、
請求項6に記載の接触検知センサ。
【請求項8】
前記絶縁線の断面形状は、前記第1導電シートに近づくにつれて先端が細くなる断面形状である、
請求項6又は7に記載の接触検知センサ。
【請求項9】
前記絶縁線の断面形状は、前記第1導電シート側の先端が円弧の断面形状である、
請求項8に記載の接触検知センサ。
【請求項10】
前記絶縁線の断面形状は、前記第2導電シート側の先端が平坦な断面形状である、
請求項9に記載の接触検知センサ。
【請求項11】
前記第2導電シートの厚みは、前記絶縁片の厚み以上である、
請求項2に記載の接触検知センサ。
【請求項12】
前記開口部により構成される感帯領域の面積と、前記絶縁片により構成される不感帯領域の面積との関係が、0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6となる、
請求項2に記載の接触検知センサ。
【請求項13】
前記絶縁片の断面形状は、前記第1導電シートに近づくにつれて先端が細くなる断面形状である、
請求項2に記載の接触検知センサ。
【請求項14】
前記絶縁片の断面形状は、前記第1導電シート側の先端が円弧の断面形状である、
請求項13に記載の接触検知センサ。
【請求項15】
前記絶縁片の断面形状は、前記第2導電シート側の先端が平坦な断面形状である、
請求項14に記載の接触検知センサ。
【請求項16】
請求項1〜15のいずれか1つに記載の前記接触検知センサを筐体の表面に設けて、前記接触検知センサでの接触検知により駆動制御される、
駆動装置。
【請求項17】
請求項1〜15のいずれか1つに記載の前記接触検知センサを有する、
介護用ベッド。
【請求項1】
複数の開口部を有する絶縁スペーサと、
前記絶縁スペーサの一方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第1導電シートと、
前記絶縁スペーサの他方の面に接し、前記絶縁スペーサの前記開口部内に入り込むように変形可能な第2導電シートと、を備えて、
前記絶縁スペーサの前記開口部を介して、前記第1導電シートと前記第2導電シートとが電気的に接触することにより、接触を検知する、
接触検知センサ。
【請求項2】
絶縁片が貼り付けられると共に前記絶縁片が沈み込むように変形可能な第2導電シートと、
前記絶縁片間の隙間に入り込むように変形可能な第1導電シートと、
前記絶縁片間の隙間を介して、前記第1導電シートと前記第2導電シートとが電気的に接触することにより、接触を検知する、
接触検知センサ。
【請求項3】
前記第2導電シートは、その厚み方向に柔軟性を有するシートである、
請求項1又は2に記載の接触検知センサ。
【請求項4】
前記第2導電シートの厚みは、前記絶縁スペーサの厚み以上である、
請求項1に記載の接触検知センサ。
【請求項5】
前記開口部により構成される感帯領域の面積と、前記絶縁スペーサにより構成される不感帯領域の面積との関係が、0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6となる、
請求項1に記載の接触検知センサ。
【請求項6】
前記絶縁スペーサは、複数の絶縁線を格子状に組み合わせて形成されたスペーサである、
請求項1に記載の接触検知センサ。
【請求項7】
前記絶縁線は、その片端で前記第1導電シートに固定された第1端部と、その他端で前記第2導電シートに固定された第2端部とを有し、
前記第2導電シートは、前記絶縁線が格子状に組み合わされた格子エリアの外側で、かつ前記第1端部側において、前記絶縁線を摺動させながら保持する第1保持部を有し、
前記第1導電シートは、前記格子エリアの外側で、かつ前記第2端部側において、前記絶縁線を摺動させながら保持する第2保持部を有する、
請求項6に記載の接触検知センサ。
【請求項8】
前記絶縁線の断面形状は、前記第1導電シートに近づくにつれて先端が細くなる断面形状である、
請求項6又は7に記載の接触検知センサ。
【請求項9】
前記絶縁線の断面形状は、前記第1導電シート側の先端が円弧の断面形状である、
請求項8に記載の接触検知センサ。
【請求項10】
前記絶縁線の断面形状は、前記第2導電シート側の先端が平坦な断面形状である、
請求項9に記載の接触検知センサ。
【請求項11】
前記第2導電シートの厚みは、前記絶縁片の厚み以上である、
請求項2に記載の接触検知センサ。
【請求項12】
前記開口部により構成される感帯領域の面積と、前記絶縁片により構成される不感帯領域の面積との関係が、0.95≧感帯領域の面積/(感帯領域の面積+不感帯領域の面積)≧0.6となる、
請求項2に記載の接触検知センサ。
【請求項13】
前記絶縁片の断面形状は、前記第1導電シートに近づくにつれて先端が細くなる断面形状である、
請求項2に記載の接触検知センサ。
【請求項14】
前記絶縁片の断面形状は、前記第1導電シート側の先端が円弧の断面形状である、
請求項13に記載の接触検知センサ。
【請求項15】
前記絶縁片の断面形状は、前記第2導電シート側の先端が平坦な断面形状である、
請求項14に記載の接触検知センサ。
【請求項16】
請求項1〜15のいずれか1つに記載の前記接触検知センサを筐体の表面に設けて、前記接触検知センサでの接触検知により駆動制御される、
駆動装置。
【請求項17】
請求項1〜15のいずれか1つに記載の前記接触検知センサを有する、
介護用ベッド。
【図1A】

【図1B】

【図1C】
【図2】
【図3】
【図4】
【図5A】

【図5B】
【図6】

【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図11】
【図12】

【図13】
【図14】
【図1B】
【図1C】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−109221(P2012−109221A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2011−202898(P2011−202898)
【出願日】平成23年9月16日(2011.9.16)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成22年度独立行政法人新エネルギー・産業技術総合開発機構「生活支援ロボット実用化プロジェクト」委託研究、産業技術力強化法第19条の適用を受ける特許出願)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成22年度独立行政法人新エネルギー・産業技術総合開発機構「生活支援ロボット実用化プロジェクト」委託研究、産業技術力強化法第19条の適用を受ける特許出願)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]