
接近報知装置、および接近報知プログラム
【課題】自車両の接近を通行人に報知する接近報知装置において、通行人に対して必要充分な警報を行えるようにする。
【解決手段】接近報知システムにおいては、自車両周囲の通行人の位置の検出結果を取得し(S220)、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する(S300)。そして、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する車外警報装置を作動させる(S120,S130)。つまり、常に車外警報装置31やライト32を利用して警報を行うのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。よって、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。
【解決手段】接近報知システムにおいては、自車両周囲の通行人の位置の検出結果を取得し(S220)、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する(S300)。そして、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する車外警報装置を作動させる(S120,S130)。つまり、常に車外警報装置31やライト32を利用して警報を行うのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。よって、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の接近を通行人に報知する接近報知装置、および接近報知プログラムに関する。
【背景技術】
【0002】
上記の接近報知装置として、自車両が走行する地域が歩行者の多い地域か否かを判定し、歩行者が多い地域を走行中であれば走行疑似音を発する装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−253236号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記接近報知装置では、歩行者等の通行人がいるにも拘わらず走行疑似音が発せられない場合があり、この場合には、自車両の接近を通行人に報知することができない。また、上記接近報知装置では、歩行者がいないにも拘わらず走行疑似音が発せられる場合があり、この場合には、走行擬似音が騒音となり、煩わしい。
【0005】
そこで、このような問題点を鑑み、自車両の接近を通行人に報知する接近報知装置において、通行人に対して必要充分な警報を行えるようにすることを本発明の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された本発明の接近報知装置において、距離取得手段は、自車両周囲の通行人の位置の検出結果を取得し、確率抽出手段は、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する。そして、作動制御手段は、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する警報手段を作動させる(請求項1)。
【0007】
つまり、本発明では常に警報手段を作動させるのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。
このような接近報知装置によれば、自車両と通行人との衝突確率が高い場合のみに警報を行うので、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。また、本発明では衝突確率マップを利用するので、きめ細かく衝突確率を設定できるとともに、関数を用いて衝突確率を演算する場合よりも衝突確率を抽出する際の処理を簡素化することができる。
【0008】
なお、衝突確率マップにおける衝突確率の分布は、実験的に求められるべきものであり、一般的には、自車両付近であって、自車両の走行予定の経路内、およびその近傍の領域が最も衝突確率が高く、この領域から離れるにしたがって衝突確率が低く設定される。
【0009】
ところで、上記の接近報知装置においては、自車両の走行に関する情報(例えば、自車両が走行する道路形状(幅や曲率等)、自車両と通行人との相対速度、自車両の走行速度等のうちの少なくとも1つの情報)を取得する情報取得手段を備え、確率抽出手段は、取得した情報に応じて、参照する衝突確率マップを変更するようにしてもよい(請求項2)。
【0010】
ここで、「衝突確率マップを変更する」とは、予め複数の衝突確率マップを準備しておき、取得した情報の値が所定の閾値(例えば、基準となる道路の曲率や速度)を超えるか否かによって参照する衝突確率マップを選択するようにしてもよいし、予め1つの衝突確率マップを準備しておき、取得した情報の値に応じて、通行人の位置と衝突確率との関係の分布を変更するようにしてもよい。また、これらの手法を組み合わせるようにしてもよい。
【0011】
通行人の位置と衝突確率との関係の分布を変更する際には、例えば、道路形状が右方向にカーブしている場合には、自車両からの距離が離れるに従って、右側の衝突確率が左側の衝突確率よりも高く設定すればよい。また、自車両速度や接近方向の相対速度が速くなるに連れて、自車両の進行方向における自車両から離れた位置の衝突確率を高く設定し、自車両の進行方向から外れた左右両側の領域における衝突確率を低く設定すればよい。
【0012】
このような接近報知装置によれば、走行に関する情報に応じて衝突確率マップを最適なものに変更することができる。よって、より詳細に衝突確率を抽出することができる。
さらに、上記の接近報知装置においては、通行人の移動を阻害する障害物の検出結果を取得する障害物取得手段と、衝突確率マップ上において、自車両の走行経路を推定する走行経路推定手段と、を備え、確率抽出手段は、衝突確率マップ上において、走行経路から見て障害物を隔てた領域における衝突確率を低く変更するようにしてもよい(請求項3)。
【0013】
このような接近報知装置によれば、自車両の走行経路に進入する可能性が低い通行人に対しては警報を行い難くすることができるので、不要な警報が発せられることをより高い確率で防止することができる。
【0014】
さらに、上記接近報知装置においては、距離取得手段による自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出する状態変化検出手段と、状態変化検出手段により通行人の位置の検出結果が得られる状態から得られない状態に変化したことが検出された場合に、この通行人の位置を推定する推定手段と、推定手段により位置が推定された通行人の真横を自車両が通過したか否かを判定する通過判定手段と、を備え、確率抽出手段は、通行人の位置の検出結果が得られない状態に変化してから通過判定手段が通過したと判定するまでの間では、推定手段が推定した通行人の位置に応じた衝突確率を抽出するようにしてもよい(請求項4)。
【0015】
特に、推定手段が通行人の位置を推定する際には、過去における通行人の位置や通行人との相対速度をメモリ等の記録手段に記録しておき、これらの情報を利用して現在における通行人の位置を推定すればよい。
【0016】
このような接近報知装置によれば、自車両が通行人の真横を通過していないときに通行人の位置が通行人の位置を検出する位置検出手段の検出範囲外になったとしても、自車両が通行人の真横を通過するまでは、衝突確率の演算を継続することができ、警報手段の作動を継続することができる。よって、安全性を向上させることができる。
【0017】
さらに、上記の接近報知に装置においては、自車両が走行により発する騒音の大きさの情報を取得する騒音レベル取得手段と、騒音の大きさが予め設定された基準値よりも大きい場合に、警報手段の作動を禁止する禁止手段と、を備えていてもよい(請求項5)。
【0018】
このような接近報知装置によれば、自車両からの騒音が基準値よりも大きい場合には、警報が不要であるとして警報手段の作動を禁止することができる。なお、自車両の騒音の大きさを測定する際には、実際に音量センサを利用して音の大きさを検出してもよいし、速度や天気と対応して予め設定された音量の値を利用してもよいし、これらを併用してもよい。
【0019】
また、上記の接近報知装置において、作動制御手段は、指向性を有し、複数の方向に対して警報を発することが可能な警報手段に対して、通行人がいる方向に警報を発するよう指示するようにしてもよい(請求項6)。
【0020】
このような接近報知装置によれば、通行人がいる方向のみに警報を発することができるので、警報が不要な方向に警報がされる煩わしさを防止することができる。
また、上記目的を達成するための成された接近報知プログラムは、コンピュータに、請求項1〜請求項6の何れかに記載の接近報知装置を構成する各手段としての機能を実現させるためのプログラムであることを特徴としている(請求項7)。
【0021】
このような接近報知プログラムによれば、少なくとも請求項1に記載の接近報知装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0022】
【図1】接近報知システム1の概略構成を示すブロック図である。
【図2】接近報知処理を示すフローチャート(a)、通行人認識処理を示すフローチャート(b)である。
【図3】補完処理を示すフローチャート(a)、および衝突確率演算処理を示すフローチャート(b)である。
【図4】通行人の位置を推定する処理を模式図である。
【図5】衝突確率マップの一例を示す説明図である。
【図6】作動判定処理を示すフローチャート(a)、作動許可判定処理を示すフローチャート(b)である。
【図7】作動継続判定処理を示すフローチャートである。
【図8】制御処理を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下に本発明にかかる実施の形態を図面と共に説明する。
[本実施形態の構成]
図1は、本発明が適用された接近報知システム1の概略構成を示すブロック図である。接近報知システム1は、例えば、低速時においてエンジンを利用することなく走行するハイブリッド車や電気自動車として構成された乗用車等の車両に搭載され、この接近報知システム1が搭載された車両(以下、自車両という。)が歩行者や自転車等の通行人に接近することを、これらの通行人に報知するシステムである。
【0024】
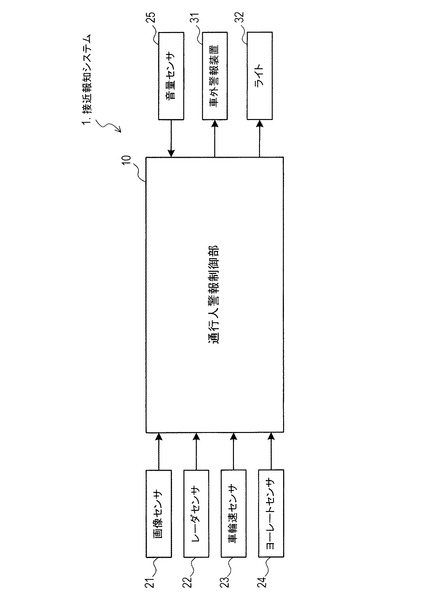
接近報知システム1は、詳細には、図1に示すように、通行人警報制御部10(接近報知装置)と、画像センサ21と、レーダセンサ22と、車輪速センサ23と、ヨーレートセンサ24と、音量センサ25と、車外警報装置31(警報手段)と、ライト32(警報手段)とを備えている。
【0025】
画像センサ21は、自車両の進行方向前方を撮像し、この画像データを通行人警報制御部10に送る。レーダセンサ22は、電磁波(例えばミリ波)を自車両の前方に発射し、その反射波を検出することによって自車両から前方物体までの車間距離を検出する。また、この際のドップラー効果を利用して前方物体との相対速度も検出する。
【0026】
車輪速センサ23は、自車両における車輪の回転速度(車両の速度)を検出する周知のセンサとして構成されている。ヨーレートセンサ24は、車両の向いている方位の変化を示すヨーレートを検出する周知のセンサとして構成されている。
【0027】
音量センサ25は、自車両の外部に配置されたマイクと、マイクによって集音された音波の入力レベル(つまり音の大きさ)を検出する検出装置とから構成されており、自車両からの走行音(タイヤノイズ等)音波の入力レベルの情報を通行人警報制御部10に送信する。
【0028】
車外警報装置31は、指向性を有する複数のスピーカと、このスピーカを鳴動させるアンプとを備えている。各スピーカは、それぞれ異なる方向に向けて配置されている。例えば、1つのスピーカで15度程度の範囲内の領域に警報を発することができるようにされており、このスピーカを水平方向(自車両の左右方向)に角度を15度ずつ異ならせながら複数配置することによって、自車両前方の左右90度以内の範囲内に警報を発することができるように構成されている。
【0029】
ライト32は、例えば自車両のヘッドライトとして構成されており、水平方向に光軸の向きを変位させることができるよう構成されている。特に、本実施形態においては、通行人警報制御部10からの指令を受けて、通行人を照らすことができるよう設定されている。
【0030】
通行人警報制御部10は、CPU、ROM、RAM等を備えた周知の電子制御装置として構成されている。この通行人警報制御部10は、ROMやRAMに格納されたプログラム(例えば、接近報知プログラム)に基づいて、車外警報装置31やライト32を利用した警報が必要か否かを判断し、警報が必要な場合に警報を実施するよう車外警報装置31やライト32に指示する処理を行う。なお、ROMには、通行人の位置と自車両および通行人が衝突する確率とが対応付けられた衝突確率マップが複数記録されている。
【0031】
[本実施形態の処理]
具体的には、図2以下に示す処理を実施する。ここで、図2(a)は通行人警報制御部10が実行する接近報知処理を示すフローチャート、図2(b)は接近報知処理のうちの通行人認識処理を示すフローチャートである。また、図3(a)は通行人認識処理のうちの補完処理を示すフローチャート、図3(b)は通行人認識処理のうちの衝突確率演算処理を示すフローチャートである。
【0032】
さらに、図6(a)は接近報知処理のうちの作動判定処理を示すフローチャート、図6(b)は作動判定処理のうちの作動許可判定処理を示すフローチャート、図7は作動判定処理のうちの作動継続判定処理を示すフローチャートである。また、図8は接近報知処理のうちの制御処理を示すフローチャートである。なお、本処理の初回起動時には後述する各種フラグはOFF状態にリセットされるものとする。
【0033】
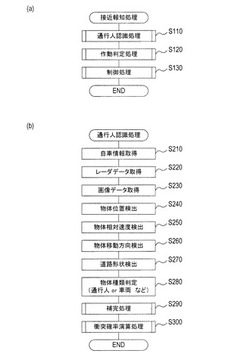
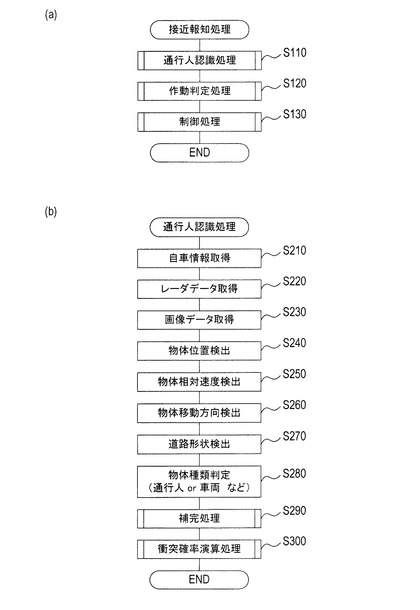
接近報知処理は、例えば、イグニッションスイッチ(図示省略)等の車両の電源がON状態にされると開始され、その後、周期的(例えば100ms毎)に繰り返し実施される処理である。具体的には、図2(a)に示すように、通行人認識処理(S110)、作動判定処理(S120:作動制御手段)、制御処理(S130:作動制御手段)が順に実施され、これらの処理が終了すると接近報知処理が終了する。
【0034】
通行人認識処理(S110)では、図2(b)に示すように、まず、自車両に関する情報を取得する(S210:騒音レベル取得手段、情報取得手段)。詳細には、車輪速センサ23による検出結果、ヨーレートセンサ24による検出結果、および音量センサ25による検出結果を取得する。
【0035】
続いて、レーダセンサ22による検出データを取得し(S220:距離取得手段、障害物取得手段)、画像センサ21による画像データを取得する(S230:障害物取得手段)。そして、これらのデータに基づいて、通行人、ガードレール、他車両等の物体の位置を検出するとともに(S240)、これらの物体との相対速度(S250:情報取得手段)、物体の移動方向を検出する(S260)。
【0036】
ここで、相対速度については、レーダセンサ22による検出結果を利用して検出する。また、物体の移動方向においては、後述するS330の処理(図3(a)および図4参照)と同様の処理を利用して検出する。
【0037】
続いて、画像データに基づいて、道路形状を検出する(S270:情報取得手段)。この処理においては、自車両が走行する道路の幅や、曲率等が検出される。なお、画像センサ21による画像データを利用する上記の処理においては、周知のエッジ検出技術や白線認識技術を利用する。
【0038】
次いで、上記の処理にて検出された物体の種別を判定する(S280:距離取得手段、障害物取得手段)。この処理においては、レーダセンサ22によって得られた物体の形状や、画像センサ21にて得られた画像データ内のエッジ点の形状が所定の形状と一致するか否かを判定するパターンマッチングを行い、物体を、歩行者等の通行人、車両、ガードレール、白線・縁石等に識別する。
【0039】
なお、S240の処理において物体そのものが検出されない場合には、S250,S260,S280の処理は省略される。
続いて、補完処理を実施する(S290)。この補完処理は、画像センサ21およびレーダセンサ22の検出範囲外に物体(特に通行人)の位置が変化したときに、その物体の位置を推定するための処理である。
【0040】
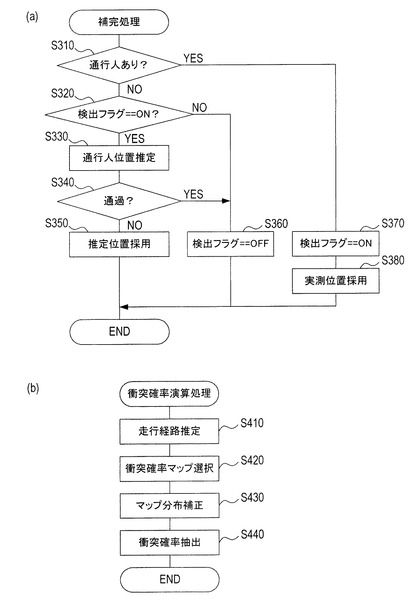
具体的な補完処理については、図3(a)に示すように、まず、通行人が検出されたか否かを判定する(S310:状態変化検出手段)。通行人が検出されていれば(S310:YES)、通行人が検出された旨を示す検出フラグをON状態に設定し(S370)、検出された通行人についての情報(実測位置)を採用するよう設定し(S380)、補完処理を終了する。なお、通行人についての実測位置については、少なくとも過去4回分がRAM等のメモリに記録される。
【0041】
また、通行人が検出されていなければ(S310:NO)、検出フラグがON状態であるか否かを判定する(S320:状態変化検出手段)。つまり、S310,S320の処理では、自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出するようにしている。
【0042】
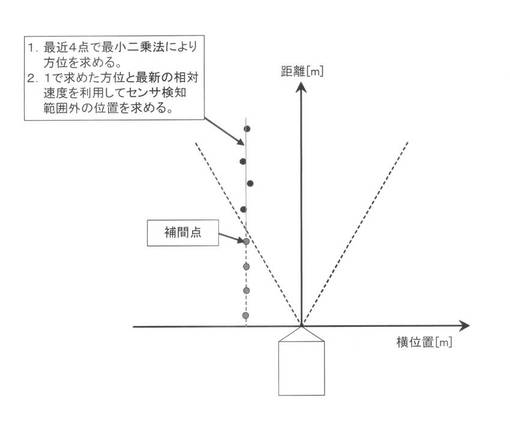
検出フラグがON状態であれば(S320:YES)、通行人の位置を推定する(S330:推定手段)。この処理については図4を用いて説明する。図4は通行人の位置を推定する処理を模式図である。
【0043】
図4では、2本の破線よりも前方側の領域内が画像センサ21およびレーダセンサ22の検出範囲内である。この検出範囲内から検出範囲外に通行人の位置が変位した場合には、最近4回分の通行人の位置に基づく近似直線を最小二乗法で検出し、自車両に対する通行人の相対移動方向を検出する。そして、レーダセンサ22によって検出された自車両に対する通行人の最新の相対移動速度と、検出した相対移動方向とを利用して、通行人の現在の位置を推定する。この処理は、通行人が自車両の真横を通過するまで繰り返し継続されることになる。
【0044】
S330の処理が終了すると、推定した通行人の位置が、自車両の真横(ここでは、自車両前端部分の真横)よりも自車両の後方であるか(通過したか)否かを判定する(S340:通過判定手段)。通行人の位置が自車両の真横よりも前方であれば(S340:NO)、推定した通行人の位置を現在の通行人の位置として採用し(S350)、補完処理を終了する。
【0045】
S350の処理が実施されると、推定された通行人の位置と相対速度とが、最新の情報としてRAM等のメモリに記録される。
また、S320の処理にて検出フラグがOFF状態である場合(S320:NO)、およびS340の処理にて通行人の位置が自車両の真横よりも後方である場合(S340:YES)には、警報を行うべき通行人が存在しないものとして、検出フラグをOFF状態に設定し(S360)、補完処理を終了する。この場合には、推定した通行人の位置を採用することはなく、通行人が検出されなかったものとして以下の処理が実施される。
【0046】
このような補完処理(S290)が終了すると、衝突確率演算処理が実施される(S300)。衝突確率演算処理では、検出または推定された通行人と、自車両とが衝突する確率を表す衝突確率を演算する。
【0047】
具体的には、図3(b)に示すように、まず、車輪速センサ23およびヨーレートセンサ24による検出結果を利用して、ROMに記録された複数の衝突確率マップ上において、自車両の走行経路を推定する(S410:走行経路推定手段)。
【0048】
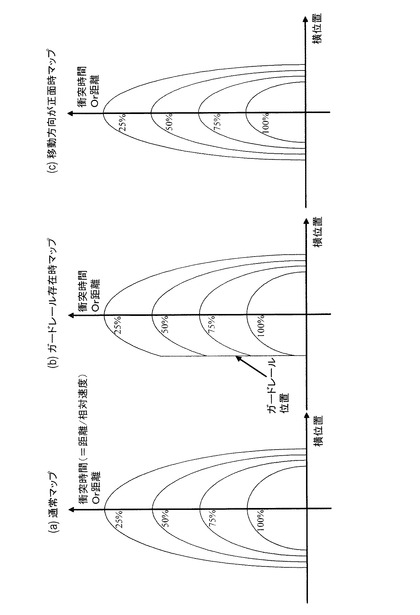
続いて、衝突確率マップを選択する(S420)。ここで、衝突確率マップとしては、例えば、図5(a)〜図5(c)に示すように、自車両の移動速度が比較的遅いとき(例えば時速30km/h未満時)に採用される「通常マップ」、自車両の移動速度が比較的遅いときにおいて左側にガードレールが存在するときに選択される「ガードレール存在時マップ」、自車両の移動速度が比較的速いときに選択される「移動方向が正面時マップ」等が準備され、ROMに記録されている。
【0049】
そして、S420の処理にて、自車両の移動速度とガードレールの有無とによって何れかのマップが選択される。ここで、これらのマップにおいては、原則として、自車両の前端部分中央を原点として、この付近の衝突確率が最も高く設定されており、原点から左右方向および前方に距離を隔てるにつれて衝突確率が低くなるように設定されている。なお、各マップにおける縦軸は、距離または衝突時間を採用することができる。
【0050】
また、「ガードレール存在時マップ」においては、自車両の走行経路に対してガードレールを隔てた領域の衝突確率を「通常マップ」よりも低く設定している。また、「移動方向が正面時マップ」においては、自車両の移動速度が比較的速く、自車両の直進性が高いことが推定されるときに採用されるため、「通常マップ」と比較して、左右方向に距離を隔てるにつれて衝突確率が急激に低くなるよう設定されている。
【0051】
続いて、選択したマップにおいて、マップにおける分布を補正する(S430:確率抽出手段)。例えば、走行経路の形状が右に曲がっていれば、前方に距離を隔てるにつれて右側の領域の衝突確率を高くするとともに、左側の領域の衝突確率を低く設定する。また、植え込みや上記以外の他のガードレール等、通行人が走行経路に移動することを阻害する障害物が存在する場合には、自車両の走行経路から見てこの障害物を隔てた領域における衝突確率を低く設定する。
【0052】
続いて、最新の通行人の位置を補正後のマップに当てはめることによって、自車両と通行人との衝突確率を抽出する(S440:確率抽出手段)。この処理が終了すると、衝突確率演算処理を終了する。
【0053】
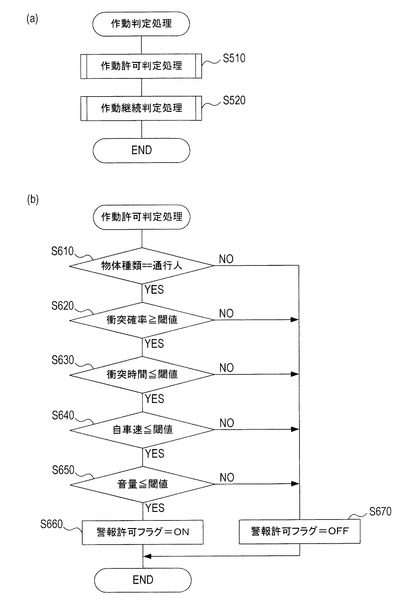
次に、作動判定処理(S120)では、現時点において警報を実施すべきか否かを判定する。この作動判定処理では、図6(a)に示すように、作動許可判定処理(S510)と、作動継続判定処理(S520:作動制御手段)とを順に実行し、これらの処理が終了すると作動判定処理を終了する。
【0054】
作動許可判定処理は、図6(b)に示すように、物体の種類が通行人であるか否か(S610)、抽出した衝突確率が閾値(例えば50%)以上であるか否か(S620)、自車両と通行人とが衝突するまでの時間を表す衝突時間(距離/相対速度)が閾値(例えば5秒)未満であるか否か(S630)、自車両の移動速度が閾値(例えば40km/h)未満であるか否か(S640)、自車両から発せられる騒音の音量が閾値(例えば50dB)未満であるか否か(S650:禁止手段)について、順次判定する。これらの判定において、全てで肯定判定されれば(S610〜S660の全てでYES)、警報を行うことを許可する旨を示す警報許可フラグをON状態に設定し(S660)、作動許可判定処理を終了する。
【0055】
また、上記の各判定において、何れかの処理で否定判定されれば(S610〜S660の何れかでNO)、否定判定された時点で警報許可フラグをOFF状態に設定し(S670:禁止手段)、作動許可判定処理を終了する。
【0056】
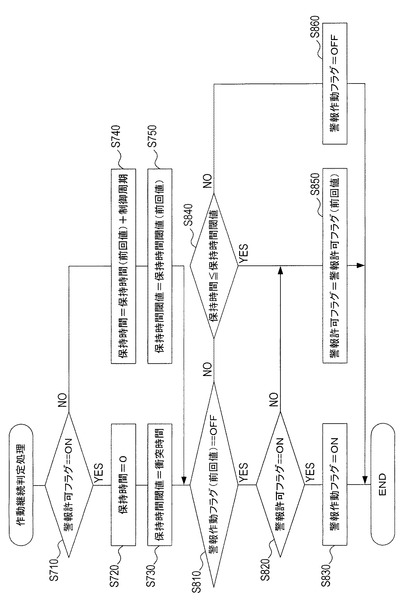
次に、作動継続判定処理では、現時点で警報を実施すべきでないと判定された場合であっても、警報が開始されていれば自車両が通行人を通過するまでは警報の作動を継続させるように設定する処理である。この作動継続判定処理では、図7に示すように、まず、警報許可フラグがON状態に設定されているか否かを判定する(S710)。
【0057】
そして、警報許可フラグがON状態に設定されていれば(S710:YES)、保持時間(タイマ)をリセット(つまり、0に設定)する(S720)。ここで、保持時間とは、警報許可フラグがON状態からOFF状態に変化してからの時間を表し、警報許可フラグがON状態であるときには常にリセットされた状態となる。
【0058】
続いて、保持時間閾値を通行人との衝突時間に設定する(S730)。ここで、通行人が複数検出された場合には、各通行人に対する衝突時間のうちの最も大きな衝突時間に設定する。そして、S810の処理に移行する。
【0059】
一方、S710の処理にて、警報許可フラグがOFF状態に設定されていれば(S710:NO)、前回の保持時間に制御周期分の時間(例えば100ms)を加算した時間を新たな保持時間とする(S740)。そして、前回の保持時間閾値をそのまま新たな保持時間閾値として設定する(S750)。
【0060】
続いて、前回の制御周期における警報作動フラグの値を判定する(S810)。前回の警報作動フラグがOFF状態であれば(S810:YES)、今回の警報許可フラグがON状態であるか否かを判定する(S820)。今回の警報許可フラグがON状態であれば(S830)、警報作動フラグをON状態にセットし(S830)、作動継続判定処理を終了する。このようにS830の処理が実施されると、後述する制御処理にて警報が開始される。
【0061】
また、S820の処理にて今回の警報許可フラグがOFF状態であれば(S820:NO)、前回の警報許可フラグの値を維持する(S850)。この場合には、警報許可フラグおよび警報作動フラグがOFFの状態が継続され、警報が発せられない状態となる。なお、S850の処理では、警報作動フラグの値は変更されない。この処理が終了すると、作動継続判定処理を終了する。
【0062】
次に、S810の処理にて前回の警報作動フラグがON状態であれば(S810:NO)、保持時間と保持時間閾値とを比較する(S840)。保持時間が保持時間閾値以下であれば(S840:YES)、前回の警報許可フラグの値を維持する(S850)。この場合には、現在の警報許可フラグの値(直前の作動許可判定処理の結果)にかかわらず警報許可フラグがON状態とされ、警報が発せられる状態となる。この処理が終了すると、作動継続判定処理を終了する。
【0063】
また、S840の処理にて、保持時間が保持時間閾値より大きければ(S840:YES)、警報作動フラグをOFF状態に設定し(S860)、作動継続処理を終了する。なお、S860の処理が実施される際には、必ず、警報許可フラグはOFF状態とされている。
【0064】
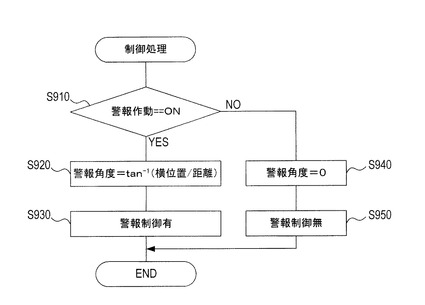
次に、制御処理(S130)は、実際に警報を出力させる処理である。具体的には図8に示すように、まず、警報作動フラグがON状態であるか否かを判定する(S910)。警報作動フラグがON状態であれば(S910:YES)、警報を発する方向を決定する(S920)。
【0065】
この処理では、通行人の横位置と距離とを利用して、
警報角度 = tan-1(横位置/距離)
として警報角度を算出する。そして、この算出した警報角度に向けて、警報を行うよう車外警報装置31およびライト32を作動させ(S930)、制御処理を終了する。
【0066】
ここで、S930の処理では、警報角度と警報音(例えば、疑似走行音やチャイム音等)を発する旨の指示とを車外警報装置31に出力するとともに、警報角度とライトを照射させる指示とをライト32に出力する。すると、車外警報装置31では、警報角度が音波の発生範囲内となるスピーカを選択し、このスピーカから警報音を発生させる。
【0067】
また、ライト32では、例えば、左右のヘッドライトのうちの通行人の位置に近い側のヘッドライトを警報角度に設定し、ライトで通行人を照射する。
一方、S910の処理で警報作動フラグがOFF状態であれば(S910:NO)、警報角度を0として(S940)、警報を発する指示を出力することなく(S950)、制御処理を終了する。
【0068】
[本実施形態による効果]
以上のように詳述した接近報知システム1において、通行人警報制御部10は、自車両周囲の通行人の位置の検出結果を取得し、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する。そして、通行人警報制御部10は、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する車外警報装置31,ライト32を作動させる。
【0069】
つまり、本実施形態の接近報知システム1では常に車外警報装置31やライト32を利用して警報を行うのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。
【0070】
このような接近報知システム1によれば、自車両と通行人との衝突確率が高い場合のみに警報を行うので、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。また、本発明では衝突確率マップを利用するので、きめ細かく衝突確率を設定できるとともに、関数を用いて衝突確率を演算する場合よりも衝突確率を抽出する際の処理を簡素化することができる。
【0071】
また、上記の接近報知システム1において通行人警報制御部10は、自車両の走行に関する情報(例えば、自車両が走行する道路形状(幅や曲率等)、自車両と通行人との相対速度、自車両の走行速度等のうちの少なくとも1つの情報)を取得し、取得した情報に応じて、参照する衝突確率マップを変更する。
【0072】
このような接近報知システム1によれば、走行に関する情報に応じて衝突確率マップを最適なものに変更することができる。よって、より詳細に衝突確率を抽出することができる。
【0073】
さらに、接近報知システム1において通行人警報制御部10は、通行人の移動を阻害する障害物の検出結果を取得し、衝突確率マップ上において、自車両の走行経路を推定する。そして、衝突確率マップ上において、走行経路から見て障害物を隔てた領域における衝突確率を低く変更する。
【0074】
このような接近報知システム1によれば、自車両の走行経路に進入する可能性が低い通行人に対しては警報を行い難くすることができるので、不要な警報が発せられることをより高い確率で防止することができる。
【0075】
さらに、接近報知システム1において通行人警報制御部10は、自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出し、この変化が検出された場合に、この通行人の位置を推定する。この際、例えば、過去における通行人の位置や、自車両と通行人との相対速度等を参考にする。
【0076】
そして、通行人警報制御部10は、位置が推定された通行人の真横を自車両が通過したか否かを判定し、通行人の位置の検出結果が得られない状態に変化してから通行人の真横を通過したと判定するまでの間では、推定した通行人の位置に応じた衝突確率を抽出する。
【0077】
このような接近報知システム1によれば、自車両が通行人の真横を通過していないときに通行人の位置が通行人の位置を検出する画像センサ21やレーダセンサ22の検出範囲外になったとしても、自車両が通行人の真横を通過するまでは、衝突確率の演算を継続することができ、車外警報装置31,ライト32の作動を継続することができる。よって、安全性を向上させることができる。
【0078】
さらに、上記の接近報知に装置において通行人警報制御部10は、自車両が走行により発する騒音の大きさの情報を取得し、騒音の大きさが予め設定された基準値よりも大きい場合に、車外警報装置31,ライト32の作動を禁止する。
【0079】
このような接近報知システム1によれば、自車両からの騒音が基準値よりも大きい場合には、警報が不要であるとして車外警報装置31,ライト32の作動を禁止することができる。
【0080】
また、接近報知システム1において車外警報装置31,ライト32は、指向性を有する警報を複数の方向に対して発することが可能に構成されており、通行人警報制御部10は、車外警報装置31,ライト32に対して、通行人がいる方向に警報を発するよう指示する。
【0081】
このような接近報知システム1によれば、通行人がいる方向のみに警報を発することができるので、警報が不要な方向に警報がされる煩わしさを防止することができる。
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0082】
例えば、上記実施形態において、自車両の騒音の大きさを測定する際には、実際に音量センサを利用して音量の値(音の大きさ)を検出するようにしたが、自車両の速度や天気(つまり、路面とタイヤとの接触状況)と対応して予め設定された音量の値をデータベースに記録しておき、自車両の速度や天気に基づいてこのデータベースを読み出すことによって音量の値を設定するようにしてもよい。また、これらの手法を併用してもよい。
【0083】
さらに、上記実施形態において、通行人を検出する際に、画像センサ21やレーダセンサ22を利用したが、これらのセンサに換えて音波によって車間距離を算出するソナーセンサ等を用いてもよい。
【0084】
また、自車両がエンジン走行とモータ走行とを切り替えられる車両である場合には、作動許可判定処理にて、モータで走行するモードであるか否かについても判定するようにしてもよい。また、車外警報装置31等の作動を手動で禁止するためのスイッチを設けておいてもよい。
【0085】
さらに、上記実施形態においては画像処理によってガードレールを検出するようにしたが、横断歩道も検出するようにしてもよい。この場合、歩行者と横断歩道との位置関係を検出し、歩行者が横断歩道付近にいる場合には、作動許可判定処理の結果にかかわらず、自車両が横断歩道を通過するまで車外警報装置31等の作動させるようにしてもよい。
【符号の説明】
【0086】
1…接近報知システム、10…通行人警報制御部、21…画像センサ、22…レーダセンサ、23…車輪速センサ、24…ヨーレートセンサ、25…音量センサ、31…車外警報装置、32…ライト。
【技術分野】
【0001】
本発明は、自車両の接近を通行人に報知する接近報知装置、および接近報知プログラムに関する。
【背景技術】
【0002】
上記の接近報知装置として、自車両が走行する地域が歩行者の多い地域か否かを判定し、歩行者が多い地域を走行中であれば走行疑似音を発する装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−253236号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記接近報知装置では、歩行者等の通行人がいるにも拘わらず走行疑似音が発せられない場合があり、この場合には、自車両の接近を通行人に報知することができない。また、上記接近報知装置では、歩行者がいないにも拘わらず走行疑似音が発せられる場合があり、この場合には、走行擬似音が騒音となり、煩わしい。
【0005】
そこで、このような問題点を鑑み、自車両の接近を通行人に報知する接近報知装置において、通行人に対して必要充分な警報を行えるようにすることを本発明の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された本発明の接近報知装置において、距離取得手段は、自車両周囲の通行人の位置の検出結果を取得し、確率抽出手段は、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する。そして、作動制御手段は、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する警報手段を作動させる(請求項1)。
【0007】
つまり、本発明では常に警報手段を作動させるのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。
このような接近報知装置によれば、自車両と通行人との衝突確率が高い場合のみに警報を行うので、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。また、本発明では衝突確率マップを利用するので、きめ細かく衝突確率を設定できるとともに、関数を用いて衝突確率を演算する場合よりも衝突確率を抽出する際の処理を簡素化することができる。
【0008】
なお、衝突確率マップにおける衝突確率の分布は、実験的に求められるべきものであり、一般的には、自車両付近であって、自車両の走行予定の経路内、およびその近傍の領域が最も衝突確率が高く、この領域から離れるにしたがって衝突確率が低く設定される。
【0009】
ところで、上記の接近報知装置においては、自車両の走行に関する情報(例えば、自車両が走行する道路形状(幅や曲率等)、自車両と通行人との相対速度、自車両の走行速度等のうちの少なくとも1つの情報)を取得する情報取得手段を備え、確率抽出手段は、取得した情報に応じて、参照する衝突確率マップを変更するようにしてもよい(請求項2)。
【0010】
ここで、「衝突確率マップを変更する」とは、予め複数の衝突確率マップを準備しておき、取得した情報の値が所定の閾値(例えば、基準となる道路の曲率や速度)を超えるか否かによって参照する衝突確率マップを選択するようにしてもよいし、予め1つの衝突確率マップを準備しておき、取得した情報の値に応じて、通行人の位置と衝突確率との関係の分布を変更するようにしてもよい。また、これらの手法を組み合わせるようにしてもよい。
【0011】
通行人の位置と衝突確率との関係の分布を変更する際には、例えば、道路形状が右方向にカーブしている場合には、自車両からの距離が離れるに従って、右側の衝突確率が左側の衝突確率よりも高く設定すればよい。また、自車両速度や接近方向の相対速度が速くなるに連れて、自車両の進行方向における自車両から離れた位置の衝突確率を高く設定し、自車両の進行方向から外れた左右両側の領域における衝突確率を低く設定すればよい。
【0012】
このような接近報知装置によれば、走行に関する情報に応じて衝突確率マップを最適なものに変更することができる。よって、より詳細に衝突確率を抽出することができる。
さらに、上記の接近報知装置においては、通行人の移動を阻害する障害物の検出結果を取得する障害物取得手段と、衝突確率マップ上において、自車両の走行経路を推定する走行経路推定手段と、を備え、確率抽出手段は、衝突確率マップ上において、走行経路から見て障害物を隔てた領域における衝突確率を低く変更するようにしてもよい(請求項3)。
【0013】
このような接近報知装置によれば、自車両の走行経路に進入する可能性が低い通行人に対しては警報を行い難くすることができるので、不要な警報が発せられることをより高い確率で防止することができる。
【0014】
さらに、上記接近報知装置においては、距離取得手段による自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出する状態変化検出手段と、状態変化検出手段により通行人の位置の検出結果が得られる状態から得られない状態に変化したことが検出された場合に、この通行人の位置を推定する推定手段と、推定手段により位置が推定された通行人の真横を自車両が通過したか否かを判定する通過判定手段と、を備え、確率抽出手段は、通行人の位置の検出結果が得られない状態に変化してから通過判定手段が通過したと判定するまでの間では、推定手段が推定した通行人の位置に応じた衝突確率を抽出するようにしてもよい(請求項4)。
【0015】
特に、推定手段が通行人の位置を推定する際には、過去における通行人の位置や通行人との相対速度をメモリ等の記録手段に記録しておき、これらの情報を利用して現在における通行人の位置を推定すればよい。
【0016】
このような接近報知装置によれば、自車両が通行人の真横を通過していないときに通行人の位置が通行人の位置を検出する位置検出手段の検出範囲外になったとしても、自車両が通行人の真横を通過するまでは、衝突確率の演算を継続することができ、警報手段の作動を継続することができる。よって、安全性を向上させることができる。
【0017】
さらに、上記の接近報知に装置においては、自車両が走行により発する騒音の大きさの情報を取得する騒音レベル取得手段と、騒音の大きさが予め設定された基準値よりも大きい場合に、警報手段の作動を禁止する禁止手段と、を備えていてもよい(請求項5)。
【0018】
このような接近報知装置によれば、自車両からの騒音が基準値よりも大きい場合には、警報が不要であるとして警報手段の作動を禁止することができる。なお、自車両の騒音の大きさを測定する際には、実際に音量センサを利用して音の大きさを検出してもよいし、速度や天気と対応して予め設定された音量の値を利用してもよいし、これらを併用してもよい。
【0019】
また、上記の接近報知装置において、作動制御手段は、指向性を有し、複数の方向に対して警報を発することが可能な警報手段に対して、通行人がいる方向に警報を発するよう指示するようにしてもよい(請求項6)。
【0020】
このような接近報知装置によれば、通行人がいる方向のみに警報を発することができるので、警報が不要な方向に警報がされる煩わしさを防止することができる。
また、上記目的を達成するための成された接近報知プログラムは、コンピュータに、請求項1〜請求項6の何れかに記載の接近報知装置を構成する各手段としての機能を実現させるためのプログラムであることを特徴としている(請求項7)。
【0021】
このような接近報知プログラムによれば、少なくとも請求項1に記載の接近報知装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0022】
【図1】接近報知システム1の概略構成を示すブロック図である。
【図2】接近報知処理を示すフローチャート(a)、通行人認識処理を示すフローチャート(b)である。
【図3】補完処理を示すフローチャート(a)、および衝突確率演算処理を示すフローチャート(b)である。
【図4】通行人の位置を推定する処理を模式図である。
【図5】衝突確率マップの一例を示す説明図である。
【図6】作動判定処理を示すフローチャート(a)、作動許可判定処理を示すフローチャート(b)である。
【図7】作動継続判定処理を示すフローチャートである。
【図8】制御処理を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下に本発明にかかる実施の形態を図面と共に説明する。
[本実施形態の構成]
図1は、本発明が適用された接近報知システム1の概略構成を示すブロック図である。接近報知システム1は、例えば、低速時においてエンジンを利用することなく走行するハイブリッド車や電気自動車として構成された乗用車等の車両に搭載され、この接近報知システム1が搭載された車両(以下、自車両という。)が歩行者や自転車等の通行人に接近することを、これらの通行人に報知するシステムである。
【0024】
接近報知システム1は、詳細には、図1に示すように、通行人警報制御部10(接近報知装置)と、画像センサ21と、レーダセンサ22と、車輪速センサ23と、ヨーレートセンサ24と、音量センサ25と、車外警報装置31(警報手段)と、ライト32(警報手段)とを備えている。
【0025】
画像センサ21は、自車両の進行方向前方を撮像し、この画像データを通行人警報制御部10に送る。レーダセンサ22は、電磁波(例えばミリ波)を自車両の前方に発射し、その反射波を検出することによって自車両から前方物体までの車間距離を検出する。また、この際のドップラー効果を利用して前方物体との相対速度も検出する。
【0026】
車輪速センサ23は、自車両における車輪の回転速度(車両の速度)を検出する周知のセンサとして構成されている。ヨーレートセンサ24は、車両の向いている方位の変化を示すヨーレートを検出する周知のセンサとして構成されている。
【0027】
音量センサ25は、自車両の外部に配置されたマイクと、マイクによって集音された音波の入力レベル(つまり音の大きさ)を検出する検出装置とから構成されており、自車両からの走行音(タイヤノイズ等)音波の入力レベルの情報を通行人警報制御部10に送信する。
【0028】
車外警報装置31は、指向性を有する複数のスピーカと、このスピーカを鳴動させるアンプとを備えている。各スピーカは、それぞれ異なる方向に向けて配置されている。例えば、1つのスピーカで15度程度の範囲内の領域に警報を発することができるようにされており、このスピーカを水平方向(自車両の左右方向)に角度を15度ずつ異ならせながら複数配置することによって、自車両前方の左右90度以内の範囲内に警報を発することができるように構成されている。
【0029】
ライト32は、例えば自車両のヘッドライトとして構成されており、水平方向に光軸の向きを変位させることができるよう構成されている。特に、本実施形態においては、通行人警報制御部10からの指令を受けて、通行人を照らすことができるよう設定されている。
【0030】
通行人警報制御部10は、CPU、ROM、RAM等を備えた周知の電子制御装置として構成されている。この通行人警報制御部10は、ROMやRAMに格納されたプログラム(例えば、接近報知プログラム)に基づいて、車外警報装置31やライト32を利用した警報が必要か否かを判断し、警報が必要な場合に警報を実施するよう車外警報装置31やライト32に指示する処理を行う。なお、ROMには、通行人の位置と自車両および通行人が衝突する確率とが対応付けられた衝突確率マップが複数記録されている。
【0031】
[本実施形態の処理]
具体的には、図2以下に示す処理を実施する。ここで、図2(a)は通行人警報制御部10が実行する接近報知処理を示すフローチャート、図2(b)は接近報知処理のうちの通行人認識処理を示すフローチャートである。また、図3(a)は通行人認識処理のうちの補完処理を示すフローチャート、図3(b)は通行人認識処理のうちの衝突確率演算処理を示すフローチャートである。
【0032】
さらに、図6(a)は接近報知処理のうちの作動判定処理を示すフローチャート、図6(b)は作動判定処理のうちの作動許可判定処理を示すフローチャート、図7は作動判定処理のうちの作動継続判定処理を示すフローチャートである。また、図8は接近報知処理のうちの制御処理を示すフローチャートである。なお、本処理の初回起動時には後述する各種フラグはOFF状態にリセットされるものとする。
【0033】
接近報知処理は、例えば、イグニッションスイッチ(図示省略)等の車両の電源がON状態にされると開始され、その後、周期的(例えば100ms毎)に繰り返し実施される処理である。具体的には、図2(a)に示すように、通行人認識処理(S110)、作動判定処理(S120:作動制御手段)、制御処理(S130:作動制御手段)が順に実施され、これらの処理が終了すると接近報知処理が終了する。
【0034】
通行人認識処理(S110)では、図2(b)に示すように、まず、自車両に関する情報を取得する(S210:騒音レベル取得手段、情報取得手段)。詳細には、車輪速センサ23による検出結果、ヨーレートセンサ24による検出結果、および音量センサ25による検出結果を取得する。
【0035】
続いて、レーダセンサ22による検出データを取得し(S220:距離取得手段、障害物取得手段)、画像センサ21による画像データを取得する(S230:障害物取得手段)。そして、これらのデータに基づいて、通行人、ガードレール、他車両等の物体の位置を検出するとともに(S240)、これらの物体との相対速度(S250:情報取得手段)、物体の移動方向を検出する(S260)。
【0036】
ここで、相対速度については、レーダセンサ22による検出結果を利用して検出する。また、物体の移動方向においては、後述するS330の処理(図3(a)および図4参照)と同様の処理を利用して検出する。
【0037】
続いて、画像データに基づいて、道路形状を検出する(S270:情報取得手段)。この処理においては、自車両が走行する道路の幅や、曲率等が検出される。なお、画像センサ21による画像データを利用する上記の処理においては、周知のエッジ検出技術や白線認識技術を利用する。
【0038】
次いで、上記の処理にて検出された物体の種別を判定する(S280:距離取得手段、障害物取得手段)。この処理においては、レーダセンサ22によって得られた物体の形状や、画像センサ21にて得られた画像データ内のエッジ点の形状が所定の形状と一致するか否かを判定するパターンマッチングを行い、物体を、歩行者等の通行人、車両、ガードレール、白線・縁石等に識別する。
【0039】
なお、S240の処理において物体そのものが検出されない場合には、S250,S260,S280の処理は省略される。
続いて、補完処理を実施する(S290)。この補完処理は、画像センサ21およびレーダセンサ22の検出範囲外に物体(特に通行人)の位置が変化したときに、その物体の位置を推定するための処理である。
【0040】
具体的な補完処理については、図3(a)に示すように、まず、通行人が検出されたか否かを判定する(S310:状態変化検出手段)。通行人が検出されていれば(S310:YES)、通行人が検出された旨を示す検出フラグをON状態に設定し(S370)、検出された通行人についての情報(実測位置)を採用するよう設定し(S380)、補完処理を終了する。なお、通行人についての実測位置については、少なくとも過去4回分がRAM等のメモリに記録される。
【0041】
また、通行人が検出されていなければ(S310:NO)、検出フラグがON状態であるか否かを判定する(S320:状態変化検出手段)。つまり、S310,S320の処理では、自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出するようにしている。
【0042】
検出フラグがON状態であれば(S320:YES)、通行人の位置を推定する(S330:推定手段)。この処理については図4を用いて説明する。図4は通行人の位置を推定する処理を模式図である。
【0043】
図4では、2本の破線よりも前方側の領域内が画像センサ21およびレーダセンサ22の検出範囲内である。この検出範囲内から検出範囲外に通行人の位置が変位した場合には、最近4回分の通行人の位置に基づく近似直線を最小二乗法で検出し、自車両に対する通行人の相対移動方向を検出する。そして、レーダセンサ22によって検出された自車両に対する通行人の最新の相対移動速度と、検出した相対移動方向とを利用して、通行人の現在の位置を推定する。この処理は、通行人が自車両の真横を通過するまで繰り返し継続されることになる。
【0044】
S330の処理が終了すると、推定した通行人の位置が、自車両の真横(ここでは、自車両前端部分の真横)よりも自車両の後方であるか(通過したか)否かを判定する(S340:通過判定手段)。通行人の位置が自車両の真横よりも前方であれば(S340:NO)、推定した通行人の位置を現在の通行人の位置として採用し(S350)、補完処理を終了する。
【0045】
S350の処理が実施されると、推定された通行人の位置と相対速度とが、最新の情報としてRAM等のメモリに記録される。
また、S320の処理にて検出フラグがOFF状態である場合(S320:NO)、およびS340の処理にて通行人の位置が自車両の真横よりも後方である場合(S340:YES)には、警報を行うべき通行人が存在しないものとして、検出フラグをOFF状態に設定し(S360)、補完処理を終了する。この場合には、推定した通行人の位置を採用することはなく、通行人が検出されなかったものとして以下の処理が実施される。
【0046】
このような補完処理(S290)が終了すると、衝突確率演算処理が実施される(S300)。衝突確率演算処理では、検出または推定された通行人と、自車両とが衝突する確率を表す衝突確率を演算する。
【0047】
具体的には、図3(b)に示すように、まず、車輪速センサ23およびヨーレートセンサ24による検出結果を利用して、ROMに記録された複数の衝突確率マップ上において、自車両の走行経路を推定する(S410:走行経路推定手段)。
【0048】
続いて、衝突確率マップを選択する(S420)。ここで、衝突確率マップとしては、例えば、図5(a)〜図5(c)に示すように、自車両の移動速度が比較的遅いとき(例えば時速30km/h未満時)に採用される「通常マップ」、自車両の移動速度が比較的遅いときにおいて左側にガードレールが存在するときに選択される「ガードレール存在時マップ」、自車両の移動速度が比較的速いときに選択される「移動方向が正面時マップ」等が準備され、ROMに記録されている。
【0049】
そして、S420の処理にて、自車両の移動速度とガードレールの有無とによって何れかのマップが選択される。ここで、これらのマップにおいては、原則として、自車両の前端部分中央を原点として、この付近の衝突確率が最も高く設定されており、原点から左右方向および前方に距離を隔てるにつれて衝突確率が低くなるように設定されている。なお、各マップにおける縦軸は、距離または衝突時間を採用することができる。
【0050】
また、「ガードレール存在時マップ」においては、自車両の走行経路に対してガードレールを隔てた領域の衝突確率を「通常マップ」よりも低く設定している。また、「移動方向が正面時マップ」においては、自車両の移動速度が比較的速く、自車両の直進性が高いことが推定されるときに採用されるため、「通常マップ」と比較して、左右方向に距離を隔てるにつれて衝突確率が急激に低くなるよう設定されている。
【0051】
続いて、選択したマップにおいて、マップにおける分布を補正する(S430:確率抽出手段)。例えば、走行経路の形状が右に曲がっていれば、前方に距離を隔てるにつれて右側の領域の衝突確率を高くするとともに、左側の領域の衝突確率を低く設定する。また、植え込みや上記以外の他のガードレール等、通行人が走行経路に移動することを阻害する障害物が存在する場合には、自車両の走行経路から見てこの障害物を隔てた領域における衝突確率を低く設定する。
【0052】
続いて、最新の通行人の位置を補正後のマップに当てはめることによって、自車両と通行人との衝突確率を抽出する(S440:確率抽出手段)。この処理が終了すると、衝突確率演算処理を終了する。
【0053】
次に、作動判定処理(S120)では、現時点において警報を実施すべきか否かを判定する。この作動判定処理では、図6(a)に示すように、作動許可判定処理(S510)と、作動継続判定処理(S520:作動制御手段)とを順に実行し、これらの処理が終了すると作動判定処理を終了する。
【0054】
作動許可判定処理は、図6(b)に示すように、物体の種類が通行人であるか否か(S610)、抽出した衝突確率が閾値(例えば50%)以上であるか否か(S620)、自車両と通行人とが衝突するまでの時間を表す衝突時間(距離/相対速度)が閾値(例えば5秒)未満であるか否か(S630)、自車両の移動速度が閾値(例えば40km/h)未満であるか否か(S640)、自車両から発せられる騒音の音量が閾値(例えば50dB)未満であるか否か(S650:禁止手段)について、順次判定する。これらの判定において、全てで肯定判定されれば(S610〜S660の全てでYES)、警報を行うことを許可する旨を示す警報許可フラグをON状態に設定し(S660)、作動許可判定処理を終了する。
【0055】
また、上記の各判定において、何れかの処理で否定判定されれば(S610〜S660の何れかでNO)、否定判定された時点で警報許可フラグをOFF状態に設定し(S670:禁止手段)、作動許可判定処理を終了する。
【0056】
次に、作動継続判定処理では、現時点で警報を実施すべきでないと判定された場合であっても、警報が開始されていれば自車両が通行人を通過するまでは警報の作動を継続させるように設定する処理である。この作動継続判定処理では、図7に示すように、まず、警報許可フラグがON状態に設定されているか否かを判定する(S710)。
【0057】
そして、警報許可フラグがON状態に設定されていれば(S710:YES)、保持時間(タイマ)をリセット(つまり、0に設定)する(S720)。ここで、保持時間とは、警報許可フラグがON状態からOFF状態に変化してからの時間を表し、警報許可フラグがON状態であるときには常にリセットされた状態となる。
【0058】
続いて、保持時間閾値を通行人との衝突時間に設定する(S730)。ここで、通行人が複数検出された場合には、各通行人に対する衝突時間のうちの最も大きな衝突時間に設定する。そして、S810の処理に移行する。
【0059】
一方、S710の処理にて、警報許可フラグがOFF状態に設定されていれば(S710:NO)、前回の保持時間に制御周期分の時間(例えば100ms)を加算した時間を新たな保持時間とする(S740)。そして、前回の保持時間閾値をそのまま新たな保持時間閾値として設定する(S750)。
【0060】
続いて、前回の制御周期における警報作動フラグの値を判定する(S810)。前回の警報作動フラグがOFF状態であれば(S810:YES)、今回の警報許可フラグがON状態であるか否かを判定する(S820)。今回の警報許可フラグがON状態であれば(S830)、警報作動フラグをON状態にセットし(S830)、作動継続判定処理を終了する。このようにS830の処理が実施されると、後述する制御処理にて警報が開始される。
【0061】
また、S820の処理にて今回の警報許可フラグがOFF状態であれば(S820:NO)、前回の警報許可フラグの値を維持する(S850)。この場合には、警報許可フラグおよび警報作動フラグがOFFの状態が継続され、警報が発せられない状態となる。なお、S850の処理では、警報作動フラグの値は変更されない。この処理が終了すると、作動継続判定処理を終了する。
【0062】
次に、S810の処理にて前回の警報作動フラグがON状態であれば(S810:NO)、保持時間と保持時間閾値とを比較する(S840)。保持時間が保持時間閾値以下であれば(S840:YES)、前回の警報許可フラグの値を維持する(S850)。この場合には、現在の警報許可フラグの値(直前の作動許可判定処理の結果)にかかわらず警報許可フラグがON状態とされ、警報が発せられる状態となる。この処理が終了すると、作動継続判定処理を終了する。
【0063】
また、S840の処理にて、保持時間が保持時間閾値より大きければ(S840:YES)、警報作動フラグをOFF状態に設定し(S860)、作動継続処理を終了する。なお、S860の処理が実施される際には、必ず、警報許可フラグはOFF状態とされている。
【0064】
次に、制御処理(S130)は、実際に警報を出力させる処理である。具体的には図8に示すように、まず、警報作動フラグがON状態であるか否かを判定する(S910)。警報作動フラグがON状態であれば(S910:YES)、警報を発する方向を決定する(S920)。
【0065】
この処理では、通行人の横位置と距離とを利用して、
警報角度 = tan-1(横位置/距離)
として警報角度を算出する。そして、この算出した警報角度に向けて、警報を行うよう車外警報装置31およびライト32を作動させ(S930)、制御処理を終了する。
【0066】
ここで、S930の処理では、警報角度と警報音(例えば、疑似走行音やチャイム音等)を発する旨の指示とを車外警報装置31に出力するとともに、警報角度とライトを照射させる指示とをライト32に出力する。すると、車外警報装置31では、警報角度が音波の発生範囲内となるスピーカを選択し、このスピーカから警報音を発生させる。
【0067】
また、ライト32では、例えば、左右のヘッドライトのうちの通行人の位置に近い側のヘッドライトを警報角度に設定し、ライトで通行人を照射する。
一方、S910の処理で警報作動フラグがOFF状態であれば(S910:NO)、警報角度を0として(S940)、警報を発する指示を出力することなく(S950)、制御処理を終了する。
【0068】
[本実施形態による効果]
以上のように詳述した接近報知システム1において、通行人警報制御部10は、自車両周囲の通行人の位置の検出結果を取得し、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する。そして、通行人警報制御部10は、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する車外警報装置31,ライト32を作動させる。
【0069】
つまり、本実施形態の接近報知システム1では常に車外警報装置31やライト32を利用して警報を行うのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。
【0070】
このような接近報知システム1によれば、自車両と通行人との衝突確率が高い場合のみに警報を行うので、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。また、本発明では衝突確率マップを利用するので、きめ細かく衝突確率を設定できるとともに、関数を用いて衝突確率を演算する場合よりも衝突確率を抽出する際の処理を簡素化することができる。
【0071】
また、上記の接近報知システム1において通行人警報制御部10は、自車両の走行に関する情報(例えば、自車両が走行する道路形状(幅や曲率等)、自車両と通行人との相対速度、自車両の走行速度等のうちの少なくとも1つの情報)を取得し、取得した情報に応じて、参照する衝突確率マップを変更する。
【0072】
このような接近報知システム1によれば、走行に関する情報に応じて衝突確率マップを最適なものに変更することができる。よって、より詳細に衝突確率を抽出することができる。
【0073】
さらに、接近報知システム1において通行人警報制御部10は、通行人の移動を阻害する障害物の検出結果を取得し、衝突確率マップ上において、自車両の走行経路を推定する。そして、衝突確率マップ上において、走行経路から見て障害物を隔てた領域における衝突確率を低く変更する。
【0074】
このような接近報知システム1によれば、自車両の走行経路に進入する可能性が低い通行人に対しては警報を行い難くすることができるので、不要な警報が発せられることをより高い確率で防止することができる。
【0075】
さらに、接近報知システム1において通行人警報制御部10は、自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出し、この変化が検出された場合に、この通行人の位置を推定する。この際、例えば、過去における通行人の位置や、自車両と通行人との相対速度等を参考にする。
【0076】
そして、通行人警報制御部10は、位置が推定された通行人の真横を自車両が通過したか否かを判定し、通行人の位置の検出結果が得られない状態に変化してから通行人の真横を通過したと判定するまでの間では、推定した通行人の位置に応じた衝突確率を抽出する。
【0077】
このような接近報知システム1によれば、自車両が通行人の真横を通過していないときに通行人の位置が通行人の位置を検出する画像センサ21やレーダセンサ22の検出範囲外になったとしても、自車両が通行人の真横を通過するまでは、衝突確率の演算を継続することができ、車外警報装置31,ライト32の作動を継続することができる。よって、安全性を向上させることができる。
【0078】
さらに、上記の接近報知に装置において通行人警報制御部10は、自車両が走行により発する騒音の大きさの情報を取得し、騒音の大きさが予め設定された基準値よりも大きい場合に、車外警報装置31,ライト32の作動を禁止する。
【0079】
このような接近報知システム1によれば、自車両からの騒音が基準値よりも大きい場合には、警報が不要であるとして車外警報装置31,ライト32の作動を禁止することができる。
【0080】
また、接近報知システム1において車外警報装置31,ライト32は、指向性を有する警報を複数の方向に対して発することが可能に構成されており、通行人警報制御部10は、車外警報装置31,ライト32に対して、通行人がいる方向に警報を発するよう指示する。
【0081】
このような接近報知システム1によれば、通行人がいる方向のみに警報を発することができるので、警報が不要な方向に警報がされる煩わしさを防止することができる。
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0082】
例えば、上記実施形態において、自車両の騒音の大きさを測定する際には、実際に音量センサを利用して音量の値(音の大きさ)を検出するようにしたが、自車両の速度や天気(つまり、路面とタイヤとの接触状況)と対応して予め設定された音量の値をデータベースに記録しておき、自車両の速度や天気に基づいてこのデータベースを読み出すことによって音量の値を設定するようにしてもよい。また、これらの手法を併用してもよい。
【0083】
さらに、上記実施形態において、通行人を検出する際に、画像センサ21やレーダセンサ22を利用したが、これらのセンサに換えて音波によって車間距離を算出するソナーセンサ等を用いてもよい。
【0084】
また、自車両がエンジン走行とモータ走行とを切り替えられる車両である場合には、作動許可判定処理にて、モータで走行するモードであるか否かについても判定するようにしてもよい。また、車外警報装置31等の作動を手動で禁止するためのスイッチを設けておいてもよい。
【0085】
さらに、上記実施形態においては画像処理によってガードレールを検出するようにしたが、横断歩道も検出するようにしてもよい。この場合、歩行者と横断歩道との位置関係を検出し、歩行者が横断歩道付近にいる場合には、作動許可判定処理の結果にかかわらず、自車両が横断歩道を通過するまで車外警報装置31等の作動させるようにしてもよい。
【符号の説明】
【0086】
1…接近報知システム、10…通行人警報制御部、21…画像センサ、22…レーダセンサ、23…車輪速センサ、24…ヨーレートセンサ、25…音量センサ、31…車外警報装置、32…ライト。
【特許請求の範囲】
【請求項1】
車両に搭載され、自車両の接近を通行人に報知する接近報知装置であって、
自車両周囲の通行人の位置の検出結果を取得する距離取得手段と、
予め通行人の位置と自車両および通行人が衝突する確率(以下、「衝突確率」という。)とが対応付けられた衝突確率マップを参照し、前記取得した通行人の位置に応じた衝突確率を抽出する確率抽出手段と、
前記抽出された衝突確率が所定の閾値よりも高い場合、警報を発する警報手段を作動させる作動制御手段と、
を備えたことを特徴とする接近報知装置。
【請求項2】
請求項1に記載の接近報知装置において、
自車両の走行に関する情報を取得する情報取得手段を備え、
前記確率抽出手段は、前記取得した情報に応じて、参照する衝突確率マップを変更すること
を特徴とする接近報知装置。
【請求項3】
請求項1または請求項2に記載の接近報知装置において、
通行人の移動を阻害する障害物の検出結果を取得する障害物取得手段と、
前記衝突確率マップ上において、自車両の走行経路を推定する走行経路推定手段と、
を備え、
前記確率抽出手段は、前記衝突確率マップ上において、前記走行経路から見て前記障害物を隔てた領域における衝突確率を低く変更すること
を特徴とする接近報知装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の接近報知装置において、
前記距離取得手段による自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出する状態変化検出手段と、
前記状態変化検出手段により前記通行人の位置の検出結果が得られる状態から得られない状態に変化したことが検出された場合に、この通行人の位置を推定する推定手段と、
前記推定手段により位置が推定された通行人の真横を自車両が通過したか否かを判定する通過判定手段と、
を備え、
前記確率抽出手段は、前記通行人の位置の検出結果が得られない状態に変化してから通過判定手段が通過したと判定するまでの間では、前記推定手段が推定した通行人の位置に応じた衝突確率を抽出すること
を特徴とする接近報知装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の接近報知装置において、
自車両が走行により発する騒音の大きさの情報を取得する騒音レベル取得手段と、
前記騒音の大きさが予め設定された基準値よりも大きい場合に、前記警報手段の作動を禁止する禁止手段と、
を備えたことを特徴とする接近報知装置。
【請求項6】
請求項1〜請求項5の何れか1項に記載の接近報知装置において、
前記作動制御手段は、指向性を有し、複数の方向に対して警報を発することが可能な警報手段に対して、前記通行人がいる方向に警報を発するよう指示すること
を特徴とする接近報知装置。
【請求項7】
コンピュータに、請求項1〜請求項6の何れかに記載の接近報知装置を構成する各手段としての機能を実現させるための接近報知プログラム。
【請求項1】
車両に搭載され、自車両の接近を通行人に報知する接近報知装置であって、
自車両周囲の通行人の位置の検出結果を取得する距離取得手段と、
予め通行人の位置と自車両および通行人が衝突する確率(以下、「衝突確率」という。)とが対応付けられた衝突確率マップを参照し、前記取得した通行人の位置に応じた衝突確率を抽出する確率抽出手段と、
前記抽出された衝突確率が所定の閾値よりも高い場合、警報を発する警報手段を作動させる作動制御手段と、
を備えたことを特徴とする接近報知装置。
【請求項2】
請求項1に記載の接近報知装置において、
自車両の走行に関する情報を取得する情報取得手段を備え、
前記確率抽出手段は、前記取得した情報に応じて、参照する衝突確率マップを変更すること
を特徴とする接近報知装置。
【請求項3】
請求項1または請求項2に記載の接近報知装置において、
通行人の移動を阻害する障害物の検出結果を取得する障害物取得手段と、
前記衝突確率マップ上において、自車両の走行経路を推定する走行経路推定手段と、
を備え、
前記確率抽出手段は、前記衝突確率マップ上において、前記走行経路から見て前記障害物を隔てた領域における衝突確率を低く変更すること
を特徴とする接近報知装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の接近報知装置において、
前記距離取得手段による自車両周囲の通行人の位置の検出結果が得られる状態から得られない状態に変化したことを検出する状態変化検出手段と、
前記状態変化検出手段により前記通行人の位置の検出結果が得られる状態から得られない状態に変化したことが検出された場合に、この通行人の位置を推定する推定手段と、
前記推定手段により位置が推定された通行人の真横を自車両が通過したか否かを判定する通過判定手段と、
を備え、
前記確率抽出手段は、前記通行人の位置の検出結果が得られない状態に変化してから通過判定手段が通過したと判定するまでの間では、前記推定手段が推定した通行人の位置に応じた衝突確率を抽出すること
を特徴とする接近報知装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の接近報知装置において、
自車両が走行により発する騒音の大きさの情報を取得する騒音レベル取得手段と、
前記騒音の大きさが予め設定された基準値よりも大きい場合に、前記警報手段の作動を禁止する禁止手段と、
を備えたことを特徴とする接近報知装置。
【請求項6】
請求項1〜請求項5の何れか1項に記載の接近報知装置において、
前記作動制御手段は、指向性を有し、複数の方向に対して警報を発することが可能な警報手段に対して、前記通行人がいる方向に警報を発するよう指示すること
を特徴とする接近報知装置。
【請求項7】
コンピュータに、請求項1〜請求項6の何れかに記載の接近報知装置を構成する各手段としての機能を実現させるための接近報知プログラム。
【図1】


【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図4】
【公開番号】特開2011−118753(P2011−118753A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−276680(P2009−276680)
【出願日】平成21年12月4日(2009.12.4)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月4日(2009.12.4)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]