
接近検知システム
【課題】ターゲットがどのような位置に存在していても、これを確実に検知することのできる接近検知システムを得る。
【解決手段】周波数によって放射指向性が変化する漏洩ケーブル201から複数の周波数帯域の電波を送信する。計測手段141は、ターゲット400に反射して漏洩ケーブル211で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する。演算手段142は、各周波数帯域の反射波の信号強度と位相の情報に基づき、計測情報をターゲット400毎に分類し、電波送受信手段200の長さ方向のターゲット400の位置Zと電波送受信手段200との距離Rを算出する。
【解決手段】周波数によって放射指向性が変化する漏洩ケーブル201から複数の周波数帯域の電波を送信する。計測手段141は、ターゲット400に反射して漏洩ケーブル211で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する。演算手段142は、各周波数帯域の反射波の信号強度と位相の情報に基づき、計測情報をターゲット400毎に分類し、電波送受信手段200の長さ方向のターゲット400の位置Zと電波送受信手段200との距離Rを算出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ケーブル状の電波送受信手段を用いてターゲットの位置を検出する接近検知システムに関するものである。
【背景技術】
【0002】
今日、漏洩ケーブルといった漏洩伝送路を用いてターゲットの接近を検知する接近検知システムが知られている。従来、このような接近検知システムとして、例えば、漏洩伝送路を監視したい敷地周辺に配置し、このような漏洩伝送路によって電波の送受信を行い、ターゲットが漏洩伝送路に近づくことで生じる電界変動に基づいてターゲットを検知するようにしたものがあった(例えば、特許文献1参照)。
【0003】
また、上記のような構成に加えて、漏洩伝送路から離れた方向の位置も検知することができるようにしたものがあった(例えば、特許文献2参照)。これは、漏洩伝送路から遠方端に電波を反射する反射器を設置した構成で実現したものである。
【0004】
更に、送信側に周波数によって放射指向性が変化する漏洩同軸ケーブルを用い、異なる周波数で交互に観測し、送信用漏洩ケーブルと受信用漏洩ケーブルで挟まれた面内に存在するターゲットを、観測距離差を利用してその位置を特定するようにしたものがあった(例えば、特許文献3参照)。
【0005】
【特許文献1】特開平10−95338号公報
【特許文献2】国際公開第05/013223号パンフレット
【特許文献3】特開2004−125604号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来のシステムでは次のような問題があった。
例えば、特許文献1に示されたようなシステムでは、ターゲットの漏洩伝送路方向の距離しか測定できず、漏洩伝送路から離れる方向の距離を算出することはできない。そのため、遠くの物体で本来検知したくない場合でも、その物体サイズが大きく、反射波のレベルが大きい場合、誤って誤検知する問題があった。
【0007】
また、特許文献2に示されたようなシステムでは、1つのターゲットのみについて漏洩伝送路に対し離れた方向の位置を測定することが可能だが、複数のターゲットを個別に位置測定することが出来ない問題があった。例えば、2つのターゲットが存在した場合、2つのターゲットの反射波が合成され漏洩伝送路の開放端で反射する。そのため、2つのターゲットの個々の直角方向の距離は区別が付かなくなる。更に、特許文献2のようなシステムでは、ターゲットが漏洩伝送路から遠くないと、直角方向の距離が分からないという問題もあった。これは、遠端結合波の信号成分より遠方に現れるターゲット成分を観測して直角方向の距離を算出しているが、遠端結合波は非常に強いため、ターゲットが漏洩伝送路からかなり離れていないと、ターゲットの成分が遠端結合波に覆い隠されて検出できないためである。
【0008】
また、特許文献3に示されたようなシステムにおいても、複数のターゲットが入った場合には、正確に計測できない問題があった。更に、このようなシステムでは、原理的に2本の漏洩同軸ケーブルの間に存在するターゲットしか検知できないため、2本の漏洩同軸ケーブルより外側のターゲットに対しては動作の保証がなく、ターゲットの位置検知もできないという問題があった。しかも、特許文献3のシステムでは、使用する周波数の選び方が悪いと、漏洩ケーブルから全く電波が出力されないことや、複数の方向に同時に電波が出力される等の現象が発生する。そして、このような周波数で測定を行うとターゲット位置を計測できない問題があった。
【0009】
この発明は上記のような課題を解決するためになされたもので、ターゲットがどのような位置に存在していても、これを確実に検知することのできる接近検知システムを得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る接近検知システムは、周波数によって放射指向性が変化するケーブル状の電波送信手段および電波受信手段とからなる電波送受信手段と、電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、電波受信手段で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット毎に分類し、分類した計測情報を基に、ターゲットの位置について、電波送受信手段の長さ方向の位置と電波送受信手段からの距離とを算出する演算手段とを備えたものである。
【発明の効果】
【0011】
この発明の接近検知システムは、電波送信手段の指向性が周波数に依存することを利用し、ターゲットに対して複数の方向から電波を放射してその反射波を観測し、演算手段によって、電波送受信手段の長さ方向のターゲットの位置と距離とを算出するようにしたので、ターゲットが電波送受信手段に対してどのような位置関係にあっても、確実にターゲットの存在を検知することができ、また、ターゲットが複数存在してもこれらを個別に位置検知することができる。
【発明を実施するための最良の形態】
【0012】
実施の形態1.
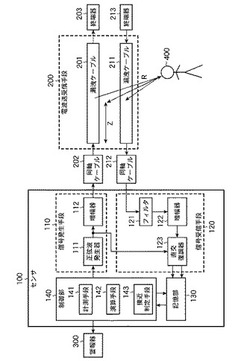
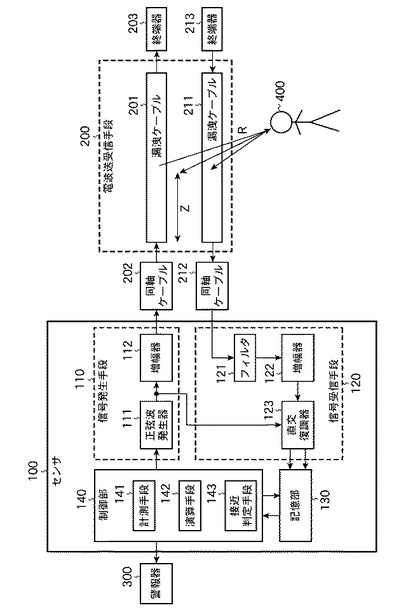
図1は、この発明の実施の形態1による接近検知システムを示す構成図である。
図において、接近検知システムは、センサ100、電波送受信手段200、同軸ケーブル202,212、終端器203,213、警報器300を備えている。
センサ100は、電波送受信手段200を用いて、ターゲット400の位置を検出するものであり、信号発生手段110、信号受信手段120、記憶部130、制御部140を備えている。ここで、信号発生手段110は、正弦波発生器111と増幅器112を備え、信号受信手段120は、フィルタ121、増幅器122、直交復調器123を備えている。また、制御部140は、計測手段141、演算手段142、接近判定手段143を備えている。更に、電波送受信手段200は、電波送信手段を実現する漏洩ケーブル201と電波受信手段を実現する漏洩ケーブル211から構成されている。
【0013】
信号発生手段110において、正弦波発生器111は、制御部140からの命令に従い、命令された周波数の正弦波を発生し、増幅器112に出力するものである。増幅器112は、正弦波発生器111の出力を所定のレベルまで増幅し、同軸ケーブル202を介して電波送受信手段200の漏洩ケーブル201に送出するものである。
信号受信手段120において、フィルタ121は、同軸ケーブル212を通って入力される信号から、漏洩ケーブル201が放射するスペクトルとは異なる、不要なスペクトルの信号を除去するフィルタである。増幅器122は、フィルタ121から出力された信号を所定のレベルまで増幅する増幅器である。
【0014】
直交復調器123は、正弦波発生器111の信号を基準に、受信用の漏洩ケーブル211における受信信号を直交検波するものである。ここで直交検波とは、I/Q検波とも呼ばれるものであって、基準信号に対して、漏洩ケーブル211から入力される受信信号をIn−Phase成分(以下、I成分と呼ぶ)とQuadrature成分(以下、Q成分と呼ぶ)に分けるものである。また、直交検波によって、正弦波信号が除去され、ベースバンド成分が出力される。
【0015】
尚、直交復調器123の出力段には図示しない低域通過フィルタ(LPF)が入っており、高周波帯のスペクトルは除去されて、必要な低周波帯(ベースバンド成分)のみが出力されるように構成されている。更に、直交復調器123には図示しないA/D変換器を備えており、ディジタル変換されたベースバンド成分であるI成分とQ成分を出力するよう構成されている。
【0016】
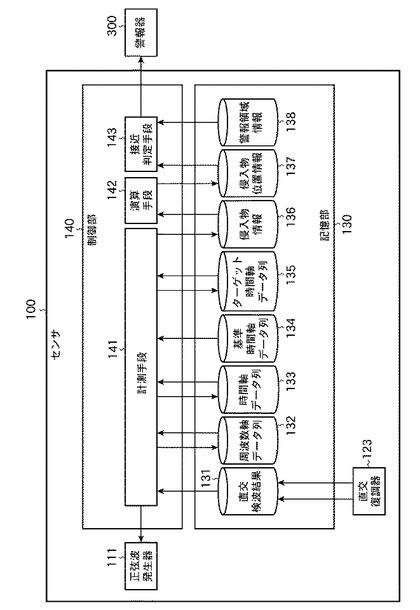
記憶部130は、信号受信手段120から出力された信号データを保持すると共に、制御部140における計測手段141〜接近判定手段143の処理データを保持するための記憶部である。尚、これらデータの詳細については後述する。
【0017】
制御部140は、CPUやメモリ等からなり、センサ100における各部の制御を司るものである。計測手段141は、漏洩ケーブル201から複数の周波数帯域の電波を送信したときに、ターゲット400で反射され、漏洩ケーブル211で受信される複数の周波数帯域の電波に基づいて、各周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力するものである。演算手段142は、計測手段141から出力される計測情報における各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット400毎に分類し、分類した計測情報を基に、ターゲット400の位置について、電波送受信手段200の長さ方向の位置(長手方向の距離)Zと電波送受信手段200からの距離Rを算出するものである。
【0018】
接近判定手段143は、演算手段142で算出された値と予め定められた所定の警報領域の情報とに基づいてターゲット400の接近の有無を判定し、この接近の有無や位置Z、距離Rを含む接近情報を警報器300に出力するものである。尚、これら計測手段141、演算手段142および接近判定手段143は、それぞれの機能に対応したソフトウェアと、これらのソフトウェアを実行するためのCPUやメモリといったハードウェアから構成されるものである。
【0019】
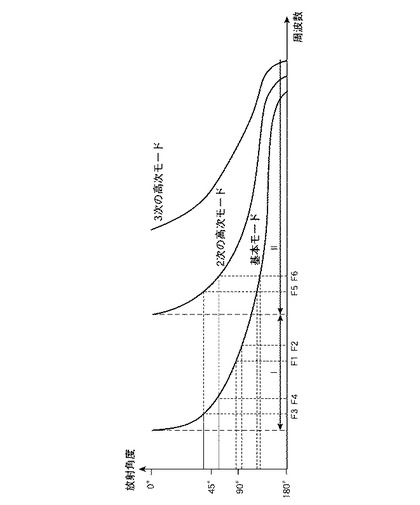
電波送受信手段200において、漏洩ケーブル201,211は、それぞれ周波数によって放射指向性が変化するケーブル状の電波送信手段および電波受信手段である。これら漏洩ケーブル201,211は、例えば漏洩同軸ケーブル(LCX:Leaky CoaXial cable)や漏洩導波管を利用してもよい。ここで、漏洩同軸ケーブルや漏洩導波管は、外皮導体に開けられたスロットにより電波を漏洩する。このとき、スロット間隔によって放射指向性が発生し、その角度は周波数に依存する。周波数と放射指向性の関係は図2に示す。尚、図2中の基本モードや高次モードといった項目については後で詳述する。
【0020】
同軸ケーブル202,212は、それぞれセンサ100と電波送受信手段200とを接続するための信号伝送路を構成するケーブルである。また、終端器203,213は、それぞれ漏洩ケーブル201,211のセンサ100とは反対側の端(以下、遠端と呼ぶ)に接続され、これら漏洩ケーブル201,211における信号を吸収するためのものである。即ち、同軸ケーブル202から漏洩ケーブル201に入力された信号は、この漏洩ケーブル201から空間中に電波として送信される。そして、送信されなかった信号は終端器203によって吸収される。
【0021】
また、漏洩ケーブル201から送信した電波は、ターゲット400で反射し、その反射した電波である反射波は漏洩ケーブル211で受信される。漏洩ケーブル211は、一般的には漏洩ケーブル201とほぼ平行に配置するが、完全に平行にする必要はなく、部分的に相互の間隔が広がったり、狭くなったりしてもよい。ただし、漏洩ケーブル201と漏洩ケーブル211との敷設間隔は、観測に利用する周波数帯域幅によって定まる測距精度に対し狭くする必要がある。測距精度より敷設間隔を広げると、「ケーブル状の電波送信手段」と「ケーブル状の電波受信手段」からなる電波送受信手段200の長さ方向のターゲットの位置Zと電波送受信手段200から離れる方向の距離Rが精度よく求められなくなる。例えば観測に利用する周波数帯域幅が10MHzであった場合、測距精度は光速÷(2×帯域幅)=3×10^8÷(2×10×10^6)=15mとなり、この間隔より狭くする必要がある。
【0022】
漏洩ケーブル211の遠端に接続された終端器213は、漏洩ケーブル211が受信した信号の内の、終端器213側に向かって伝搬する信号を吸収するためのものである。また、漏洩ケーブル211が受信した信号の内のセンサ100側に向かって伝搬する信号は、同軸ケーブル212を通って、信号受信手段120に入力されるよう構成されている。
【0023】
警報器300は、例えばディスプレイ等の表示手段とスピーカ等の音声出力手段とを備え、接近判定手段143から出力される接近情報に基づいて、警報を鳴らし、かつ、接近位置である電波送受信手段200とターゲット400の位置Zや距離Rを表示するよう構成されている。
【0024】
次に、実施の形態1の動作について説明する。先ず、記憶部130に記憶されるデータについて説明する。
図3は、記憶部130に記憶されるデータと制御部140における各手段との関係を示す説明図である。
信号受信手段120の直交復調器123の出力であるI成分とQ成分は、図3中に示すように直交検波結果131として記憶部130に記憶される。計測手段141は、直交検波結果131、即ちI成分とQ成分を参照して、侵入物情報136を出力するが、その処理は次の通りである。
【0025】
侵入物情報136とは電波送受信手段200に接近するターゲット400による反射波の信号の振幅と送信してから受信されるまでの伝搬遅延時間である。尚、この計測を実現する方法にはUWB(ウルトラワイドバンド)で利用されるパルス方式、FM−CW方式、スペクトル拡散方式等があるが、ここでは周波数チャープ方式での構成方法を説明する。
【0026】
計測手段141は信号発生手段110の正弦波発生器111に対して発振周波数を設定し、このとき観測される直交検波結果131を記憶部130の周波数軸データ列132に記憶させる。そして、設定する発振周波数を徐々に変化させていき、それぞれの直交検波結果131を列に並べて記憶部130に記憶させる。すると、記憶部130には各周波数に対する直交検波結果131である周波数軸データ列132が出来上がる。この周波数軸データ列132はI成分とQ成分の列であるが、数値計算上、I成分を実数、Q成分を虚数として扱う。よって、この周波数軸データ列132を複素数として逆フーリエ変換することができ、逆フーリエ変換して得られる時間軸データ列133を記憶部130に記憶させる。この時間軸データ列133は、いわゆるパルス波を送信したときのインパルスレスポンスに相当するもので、この時間軸データ列にはターゲット400で反射した電波の情報が含まれている。そのため、ターゲット400で反射した電波の情報を得るには、予め取得しておいた、ターゲット400が無い、初期状態における時間軸データ列を基準に差分をとればよい。
【0027】
記憶部130には、そのように、予め取得しておいた初期状態における基準時間軸データ列134を記憶しておき、計測手段141は、基準時間軸データ列134と時間軸データ列133の差分を取ることでターゲット時間軸データ列135を得る。このターゲット時間軸データ列135には、信号発生手段110が信号を出力してから信号受信手段120で受信されるまでの伝搬遅延時間に相当する時間位置にピークが現れる。即ち、パルス波を送信して、ターゲット400に当ったパルス波が時間遅延して戻ってくる波形が現れる。ここで、ターゲット400が複数あった場合、それぞれのターゲット400に対応するピークが現れる。そのため、予め定めておいた閾値を越えるピークを全て抽出し、各ピークの大きさである振幅と位相と伝搬遅延時間を抽出する。
【0028】
さて、計測手段141は信号発生手段110の正弦波発生器111に対し発振周波数を設定しながら周波数軸データ列132を取得し、上記の、送信してから受信されるまでの伝搬遅延時間と振幅を得る工程を別の周波数範囲においても行う。すると、振幅と位相と伝搬遅延時間が2セット得られ、この2組の振幅と位相と伝搬遅延時間からなる侵入物情報136を計測手段141は記憶部130に出力する。
【0029】
この動作の意味を図4を用いて説明する。
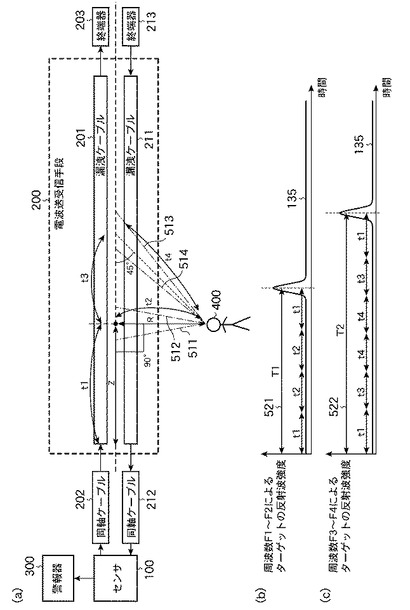
漏洩ケーブル201,211は、周波数によって放射指向性が変化する特性がある。そのため、図4(a)に示すように、周波数F1の放射角511、周波数F2の放射角512において、放射角の中央の角度が90度となる周波数F1,F2を選ぶ。この周波数F1からF2に掛けて計測手段141でターゲット時間軸データ列135を取得し、そこから伝搬遅延時間521を得る。また、周波数F3の放射角513、周波数F4の放射角514において、放射角の中央の角度が45度となる周波数F3,F4を選ぶ。この周波数F3からF4に掛けて計測手段141でターゲット時間軸データ列135を取得し、そこから伝搬遅延時間522を得る。伝搬遅延時間521は、図4(b)に示すように、
T1=2×(t1+t2) (1)
であり、伝搬遅延時間522は、図4(c)に示すように、
T2=2×(t1+t3+t4) (2)
である。尚、図4(b),(c)において、ターゲット時間軸データ列135における波形のピークは反射波を示している。
【0030】
漏洩ケーブル201,211の中は空気中と誘電率が異なるため、電波の速度が遅くなり、波長が短縮する。この短縮率を波長短縮率(以下、Kとする)という。また、電波の速度が遅い分、電気的な長さが1÷波長短縮率だけ長くなる。これらの点を考慮し、図4(a)〜(c)から
t2=t3÷K (3)
t2=t4cos(45°)=t4÷(√2) (4)
の関係なども導かれる。
【0031】
これらの連立方程式を解くことで、t1とt2が求められる。この計算は演算手段142で行われるが、t1とt2が分かれば、ケーブル状の電波送信手段とケーブル状の電波受信手段からなる電波送受信手段200の長さ方向のターゲット400の位置Zと、その位置における電波送受信手段200とターゲット400との距離Rを算出することが可能となる。
【0032】
次に、周波数F1,F2と周波数F3,F4の範囲について説明する。
一般に周波数範囲を広げるほど、時間波形でのインパルスレスポンスが鋭くなるため、ターゲットの測距精度は向上する。しかし、漏洩ケーブルを用いているため周波数範囲を広げると放射角度範囲が広がる。そのため、逆にターゲット像がボケてしまう。また、図2の「II」の範囲で示すように、漏洩ケーブルは周波数が高いと複数の方向に指向性が向く高次モードが存在する。ここでは、ターゲット時間軸データ列135の各要素の大きさを時間の早い方から順に調べて行き、最初に現れるピークをターゲットとしているため、複数の方向に電波が放射されると、1つのターゲットにつき複数のピークが存在することになり、計算が成り立たなくなる。そのため、放射方向が1つしか存在しない周波数帯の中、つまり図2の「I」の範囲から周波数F1,F2と周波数F3,F4を選ぶ。また、本発明において、図2の「I」の範囲を、基本モード領域と称することとする。
【0033】
放射方向が1つしか存在しない周波数帯は、漏洩同軸ケーブルや漏洩導波管の外皮導体に開けられたスロットのピッチと波長短縮率によって次式の範囲となる。
(1/K+1)/2<使用周波数/スロットピッチ<1/K+1
尚、上式については既知であるため、導出方法等の説明は省略する。
【0034】
さて、ターゲットの位置計測精度を上げたい場合、できるだけ、2つの角度の差を広くしたい。ところで、先の説明では、放射角を、例えば90度と45度に選んだ。このとき、このままの角度で遠端付近にターゲット400が入った場合、測定精度が著しく劣化する。遠端付近では残りの漏洩ケーブル201,211が短いため、45度の放射電波が弱くなるためである。これを回避する方法として、遠端付近は135度と90度の組合せで観測する方法がある。つまり、周波数の組合せを変えて観測することで、漏洩ケーブル201,211の端の部分でも測定精度を落とすことなく、ターゲット400の測定が可能となる。
【0035】
ところで、上記使用周波数の範囲は通常の漏洩同軸ケーブルではそれほど厳密に管理されない。なぜなら、通常の漏洩同軸ケーブルでは放送を主な目的としており、漏洩同軸ケーブルの周辺に電波が放射されれば目的が達成できるためである。しかし、本発明で求める位置の測定には放射の方向の確度や放射方向の数が重要な要素となる。
【0036】
次に、計測手段141による具体的な計測処理について説明する。
図5は、計測手段141の動作例を示すフローチャートである。
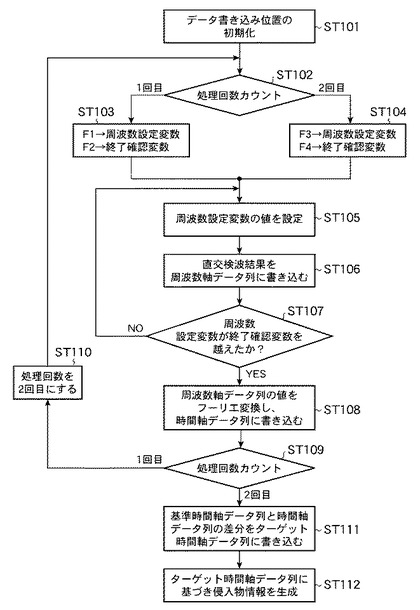
先ず、処理回数カウント、また周波数軸データ列132の書き込み位置、時間軸データ列133の書き込み位置の初期化を行う(ステップST101)。次に、処理回数カウントを検査し、1回目であればステップST103へ、2回目であればステップST104へ移る。ステップST103では、周波数F1の値を周波数設定変数に、周波数F2の値を終了確認変数にセットし、ステップST105へ移る。ステップST104では、周波数F3の値を周波数設定変数に、周波数F4の値を終了確認変数にセットし、ステップST105へ移る。
【0037】
ステップST105では、信号発生手段110の正弦波発生器111に対し周波数設定変数の値を設定する。設定後に次回設定のための周波数設定変数を終了確認変数の値に向け少しずれた周波数に更新する。次に、記憶部130の直交検波結果131が更新されるのを待ち、更新されたら、直交検波結果131を周波数軸データ列132に書き込む(ステップST106)。I成分は実部、Q成分は虚部とする。書き込み後に、次回の書き込み位置を更新する。
【0038】
次に、ステップST107において、周波数設定変数が終了確認変数を越えたかどうか確認し、越えてなければステップST105に戻り、越えていればステップST108に進む。ステップST108では、周波数軸データ列132の値をフーリエ変換処理し、時間軸データ列133に書き込む。書き込み後に、次回の処理のため、周波数軸データ列132の書き込み位置、時間軸データ列133の位置を処理回数毎に区別できる位置に初期化する。
【0039】
次に、ステップST109において、処理回数カウントを調べ、処理回数カウントが1回目であれば、処理回数カウントを2回目にして(ステップST110)、ステップST102へ戻り、処理回数カウントが2回目であればステップST111へ移る。ステップST111では、予め取得しておいた、基準時間軸データ列134と時間軸データ列133の差分をとり、ターゲット時間軸データ列135に書き込む。基準時間軸データ列134と時間軸データ列133はそれぞれ周波数F1からF2とF3からF4に対応する2組のデータ列が入っているため、それぞれのデータ列で差分をとり、2組のターゲット時間軸データ列135を得る。
【0040】
次に、ステップST112では、2組のターゲット時間軸データ列135から予め定めておいた閾値を越えるピークを全て抽出し、各ピークの大きさである振幅と位相と伝搬遅延時間を抽出し侵入物情報136として記憶部130に出力する。侵入物情報136は2組できる。
以上で、計測手段141による処理は終了し、次に演算手段142に移る。
【0041】
上述したように、演算手段142は、ターゲット400の侵入物情報136をターゲット400毎に分類し、分類した計測情報を基に、ターゲット400の位置について、電波送受信手段200の長さ方向のターゲット400の位置Zと電波送受信手段200との距離Rを算出するものである。ここで、ターゲット400が複数あった場合、演算手段142は、2組の侵入物情報136の各組間でターゲット毎の組合せを決定する必要がある。例えば、2つのターゲットがあった場合、それぞれの侵入物情報136の各組には2つのターゲットに関する情報がある。よって、この組合せを誤るとターゲット位置は全く誤ったものとなる。
【0042】
この組合せを方法は、単純なものには侵入物情報136の中の振幅を用いる方法がある。即ち、振幅値が近いもの同士で組合せる方法である。しかし、ターゲットが漏洩ケーブルに近いと振幅値は近い値となるが、遠いとその差はひらく。様々な距離に複数のターゲットがあった場合、組合せを誤る危険がある。しかし、漏洩ケーブルに近いと振幅値は近い値となり、伝搬遅延時間もほぼ同じ値になる。そのため、組合せ精度は向上し、接近検知システムとしては問題とならない。
【0043】
但し、より精度を向上させるため、振幅と位相の時間変化を利用する。
振幅、位相の時間微分値が単純な例であるが、信号が変化するタイミングや振幅、位相の時間変化をフーリエ変換などで周波数解析する方法が有効である。
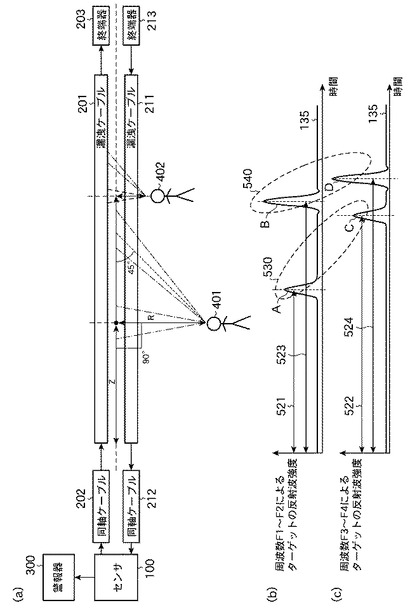
図6は2つのターゲットの観測状況を説明する図であり、ターゲット401と402による観測状況を示している。
周波数F1からF2の観測ではターゲット時間軸データ列135として、反射波Aと反射波Bの2つの反射波を検出する(図6(b)参照)。また、周波数F3からF4の観測ではターゲット時間軸データ列135として、反射波Cと反射波Dの2つの反射波を検出する(図6(c)参照)。次に、反射波Aの伝搬遅延時間521と、反射波Bの伝搬遅延時間523と、反射波Cの伝搬遅延時間522と、反射波Dの伝搬遅延時間524との間で、各ターゲット401,402に対応した伝搬遅延時間の組合せを分類する。
【0044】
この分類には先ほど説明したように、振幅を用いる方法がある。
振幅で比較すれば、反射波A<反射波B、反射波C<反射波Dの関係があり、(反射波Aと反射波C)、(反射波Bと反射波D)の分類ができる(図6(b),(c)における破線部分530,540参照)。
【0045】
また、振幅だけでは、誤分類する恐れがあるので、信号が変化するタイミングも利用することができる。
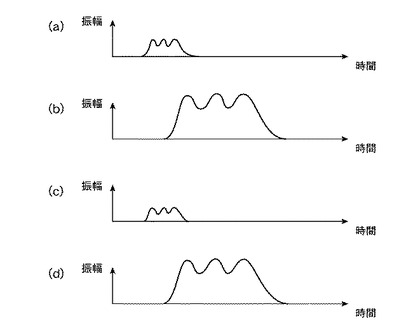
図7は、各伝搬遅延時間で観測される反射波強度の時間履歴の図である。
図中、(a)〜(d)がそれぞれ反射波A〜反射波Dの波形に対応している。
図7において、反射波A(a)と反射波C(c)が同時に立ち上がって、信号の変化が起こっている。また、反射波B(b)と反射波D(d)が同時に立ち上がって、信号の変化が起こっている。よって、(反射波Aと反射波C)、(反射波Bと反射波D)の分類ができる。また、各信号が立ち上がっている頂点部分で反射波Aと反射波Cは細かく変動し、また、反射波Aと反射波Cは大きく緩やかに変動している。この違いは変動周波数として周波数解析をすることで容易に検出でき、変動周波数同士の組合せでも分類できる。
このように、各ピークの立ち上がりタイミングによる分類や、時間変化を周波数解析し、同じ周波数同士で組合せる分類を行うことで精度の高い組合せの抽出が可能となる。
【0046】
以上説明した組合せにより、演算手段142は、ターゲット400に応じた伝搬遅延時間T1とT2を得る(図4に示す場合)。このT1とT2からターゲット400の位置を計算する。この計算には先に説明した式(1)から式(4)の連列方程式を解くことによって得られる次の式(5),式(6)を用いてt1とt2を得る。
t1=T1÷2−(T2−T1)÷(2×(K+√2−1)) (5)
t2=(T2−T1)÷(2×(K+√2−1)) (6)
【0047】
ここで、T1とは周波数F1からF2を用いて求められた、侵入物情報136の1番目に記憶されている伝搬遅延時間であり、T2とは周波数F3からF4を用いて求められた、侵入物情報136の2番目に記憶されている伝搬遅延時間である。
t1は、図4(a)に示すように電波送受信手段200のセンサ100側から、ターゲット400から電波送受信手段200に下ろした垂線の交点までの距離、つまり電波送受信手段200の長さ方向のターゲットの位置Zまで信号が伝搬する時間である。また、t2は、上記交点とターゲット400の距離、つまり電波送受信手段200とターゲット400間の距離Rを信号が伝搬する時間である。
【0048】
そして、位置Z、距離Rはt1,t2から次の式(7)、式(8)を用いて求められる。
Z=t1×K×C (7)
R=t2×C (8)
ここで、Cは光速(=3×10^8)である。
演算手段142は、このような演算を行うことで、位置Z、距離Rからなる侵入物位置情報137を記憶部130に出力する。
【0049】
次に、接近判定手段143の動作について説明する。
上述したように、接近判定手段143は、侵入物位置情報137を用いて、ターゲット400の接近を検知する。これは予め記憶部130の警報領域情報138で示された範囲内にターゲット400の位置Z、距離Rが入っているかを探査することで実行される。
警報領域情報138には電波送受信手段200にある一定以上近づくターゲットを全て検知するには、距離Rの閾値だけを設定すればよい。また、例えば、入出門のように、接近通過が許される部分なども位置Z、距離Rの警報範囲を細かく指定すれば実現できる。更に、時計と組合せて、日中と夜間で検知範囲を変更することも出来る。
接近判定手段143は、ターゲット400が警報領域情報138で設定された範囲に侵入した場合、接近情報として接近の有無、位置Z、距離Rを警報器300に出力する。警報器300は、接近情報から接近有りを検出すると、所定の警報音を発生させ、かつ、接近位置である位置Z、距離Rを表示する。
【0050】
ところで、送信周波数F1,F2,F3,F4は様々な組合せで観測することが望ましい。なぜなら、先にも説明したように、例えば、90度と45度に選んだとき、このままの角度で遠端付近にターゲット400が入った場合、測定精度が著しく劣化するためである。
【0051】
周波数を変えて、放射方向を変えた場合、式(5)、式(6)の代わりに次式を用いる。
【数1】

【0052】
ここで、θ1=π/2、θ2=π/4とすると式(9)は式(5)と一致し、式(10)は式(6)と一致する。更に、送信周波数の組合せを常に変化させることにより、一部の周波数が電波妨害等で利用できなくとも、別の周波数で観測できるなど、妨害に強くなり、セキュリティシステムとしての価値も向上する。また、漏洩ケーブル201,211の端の部分でも測定精度を落とすことなく、ターゲット400の測定が可能となる。
【0053】
更に、周波数の組合せを変化させることで、複数ターゲットを観測したときに現れる、複数のピークの組合せを根本的に解決する方法がある。それは、2つの周波数の組合せを初めは同じか近い値にしておいて、徐々に広げながら観測するのである。そうすると、複数のピークは、2組の侵入物情報136の各組間で最初は同じ伝搬遅延時間だったものが、少しずつその差が開いていく。そうすれば、組合せを誤る心配もなく、必要な測定精度が得られる程度に差が開いたところで、位置を計算すればよい。
【0054】
また、少しずつ2つの周波数の組合せを開いていくことに時間が掛かる場合は、周波数軸データ列を十分に広い範囲で取得しておき、その中から必要な周波数を抜き出して、その後の処理を行えば、計測行為は1回で済み、後は計算だけなので、非常に高速に、かつ高精度な位置計測が可能となる。
【0055】
尚、上記実施の形態1では、ターゲットの反射波の振幅と伝搬遅延時間を測定するのに、周波数チャープ方式で、信号発生手段と信号受信手段と計測手段を構成した。しかし、この計測を実現する方法にはUWB(ウルトラワイドバンド)で利用されるパルス方式、FM−CW方式、スペクトル拡散方式等も利用可能であり、それらを用いても構わない。但し、送信周波数のスペクトルの周波数範囲は、所定の式で示される範囲内(基本モード領域の範囲内)とする必要がある。
【0056】
以上のように、実施の形態1の接近検知システムによれば、周波数によって放射指向性が変化するケーブル状の電波送信手段と、電波送信手段に対し略平行に敷設され、電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、電波受信手段で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット毎に分類し、分類した計測情報を基に、ターゲットの位置について、電波送受信手段の長さ方向の位置と電波送受信手段からの距離とを算出する演算手段とを備えたので、ターゲットが電波送受信手段に対してどのような位置関係にあっても、確実にターゲットの存在を検知することができ、また、ターゲットが複数存在してもこれらを個別に位置検知することができる。
【0057】
また、実施の形態1の接近検知システムによれば、電波送信手段から送信される電波の周波数帯域は、電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が単一である基本モード領域の範囲であり、かつ、基本モード領域の範囲で、電波送信手段に対して複数の周波数帯域の信号が与えられるようにしたので、漏洩ケーブルの高次モードによる複数方向への電波の放射を防ぎ、確実かつ正確にターゲットを検出できる。
【0058】
また、実施の形態1の接近検知システムによれば、警報を出力する警報器を備え、所定の警報領域内にターゲットが存在した場合は、前記警報器から警報を発生させるようにしたので、予め指定した警報領域内にターゲットが侵入した場合でも、容易にその事態を認識することができる。
【0059】
実施の形態2.
実施の形態2は観測に利用する周波数範囲として高次モード領域(これについては後述する)を用いるようにしたものである。
【0060】
図面上の構成は、実施の形態1と同様であるため図1〜図4を援用して説明する。実施の形態2における計測手段141は、信号発生手段110に対して漏洩ケーブル201,211における高次モード領域の範囲内の周波数を出力するよう指示する点が実施の形態1とは異なる点である。即ち、漏洩ケーブル201から送信される電波の周波数が次の示される範囲となるよう信号発生手段110に指示する。
使用周波数/スロットピッチ<(1/波長短縮率+1)/2
これは、図2における「II」の領域にあたるもので、この領域の周波数を用いると漏洩ケーブル201から複数の方向に電波が放射される。本発明では、図2における「II」の領域を高次モード領域と称することとする。尚、上式についても既知であるため、ここでの詳細な説明は省略する。
【0061】
その他のセンサ100内における各部の構成は実施の形態1と同様であるため、ここでの説明は省略する。
【0062】
次に、実施の形態2の接近検知システムの動作について説明する。
本実施の形態では、1つの周波数範囲だけでターゲット400を観測し、ケーブル状の電波送信手段とケーブル状の電波受信手段からなる電波送受信手段200の長さ方向のターゲットの位置Zと電波送受信手段200との距離Rを求める。
【0063】
ターゲット400の観察に利用する周波数帯は、図2における「II」の領域であるため、適切な周波数F5からF6を選択すると、同時に2つの角度でターゲット400を観測できる。そのため、計測手段141で実行する周波数軸データ列132の取得は1回でよい。その代わり、フーリエ変換後に基準時間軸データ列134との差分で得られるターゲット時間軸データ列135には2つのピークが現れる。このピークがそれぞれの角度による観測結果に対応する。よって、この2つのピークを測定し、伝搬遅延時間T1とT2を得る。以下、計測手段141の動作を詳細に説明する。
【0064】
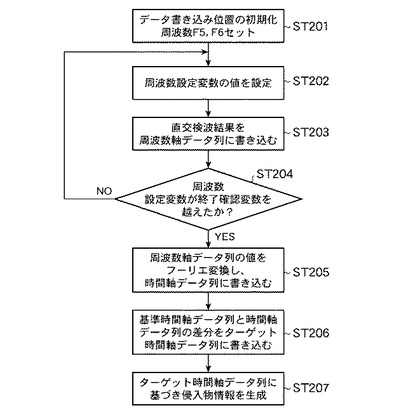
図8は、計測手段141の動作を示すフローチャートである。
先ず、ステップST201において、周波数軸データ列132の書き込み位置、時間軸データ列133の書き込み位置の初期化を行う。また、周波数F5の値を周波数設定変数に、周波数F6の値を終了確認変数にセットする。尚、これら周波数F5,F6の値は、図2に示すように、上述した高次モード領域の周波数である。
【0065】
次に、ステップST202において、信号発生手段110の正弦波発生器111に対し周波数設定変数の値を設定する。設定後に次回設定のための周波数設定変数を終了確認変数の値に向け少しずれた周波数に更新する。次に、ステップST203において、記憶部130の直交検波結果131が更新されるのを待ち、更新されたら、直交検波結果131を周波数軸データ列132に書き込む。I成分は実部、Q成分は虚部とする。書き込み後に、次回の書き込み位置を更新する。
【0066】
次に、ステップST204において、周波数設定変数が終了確認変数を越えたかどうか確認し、越えてなければステップST202に戻り、越えていればステップST205に進む。ステップST205では、周波数軸データ列132の値をフーリエ変換処理し、時間軸データ列133に書き込む。次に、ステップST206において、予め取得しておいた、基準時間軸データ列134と時間軸データ列133の差分をとり、ターゲット時間軸データ列135に書き込む。
【0067】
次に、ステップST207において、ターゲット時間軸データ列135をそれぞれ時間の早い方から順に実部と虚部の二乗和の平方根である振幅をサーチし、最初に所定の閾値を越えたピークと2番目に所定の閾値を越えたピークを検出し、そのときの時間軸の値と、振幅を侵入物情報136として記憶部130に出力する。侵入物情報136は2組できる。
これで計測手段141の処理は終了し、次に演算手段142の処理に移る。
【0068】
演算手段142は、所定の数式で時間t1とt2を求め、位置ZとRを算出し、侵入物位置情報137を出力する。ここで、放射角度が実施の形態1と同じとは限らないため、実施の形態1で利用した式を利用できるとは限らないが、どのような角度であっても、連立方程式を立てて解くことにより、実施の形態1で示した式(5)、式(6)を導き出すことはできる。例えば、第1の周波数による2種類の角度をθ1およびθ2とすると、式(5)、式(6)に対応する式は、実施の形態1における式(9)および式(10)となる。ここで、θ1=π/2、θ2=π/4とすると式(9)は式(5)と一致し、式(10)は式(6)と一致する。そして、位置Z、距離Rはt1、t2から実施の形態1で示した式(7)、式(8)を用いて求められる。演算手段142は、このような演算を行うことで、位置Z、距離Rからなる侵入物位置情報137を記憶部130に出力する。接近判定手段143は、侵入物位置情報137を用いて、ターゲット400の接近を検知するが、これ以降の動作は実施の形態1と同じであるため、ここでの説明は省略する。
【0069】
尚、上記実施の形態2においても、演算手段142は、図6および図7で示したようなターゲットが複数存在するような場合でも実施の形態1と同様の動作により、複数のターゲット401,402の位置を検出することができる。
【0070】
以上のように、実施の形態2の接近検知システムによれば、電波送信手段から送信される電波の周波数帯域は、電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が複数存在する高次モード領域の範囲であり、かつ、高次モード領域の範囲で、電波送信手段に対して単一の周波数帯域の信号が与えられるようにしたので、1つの周波数で複数の方向からターゲットに電波を放射することができるため、測定にかかる時間を短縮することができる。
【0071】
実施の形態3.
実施の形態3は、実施の形態1または実施の形態2の接近検知システムの構成を複数組備え、ターゲット400の3次元位置を計測するようにしたものである。
【0072】
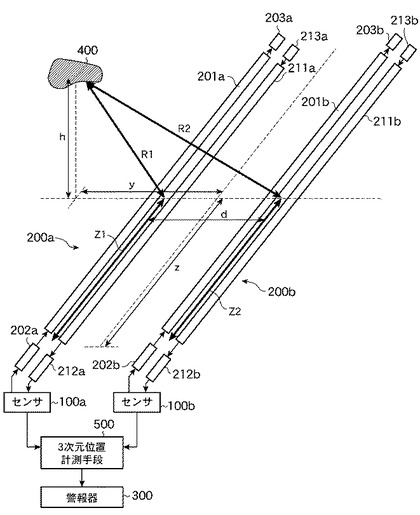
図9は、実施の形態3の接近検知システムの構成と動作原理を示す説明図である。
実施の形態3の接近検知システムは、2組のセンサや電波送受信手段を備えている。即ち、センサ100a、同軸ケーブル202a,212a、漏洩ケーブル201a,211a、終端器203a,213aからなる一方の組と、センサ100b、同軸ケーブル202b,212b、漏洩ケーブル201b,211b、終端器203b,213bからなる他方の組とを備えている。それぞれの構成は、実施の形態1または実施の形態2におけるセンサ100、同軸ケーブル202,212、漏洩ケーブル201,211、終端器203,213と同様であるため、ここでの説明は省略する。但し、実施の形態3においては、接近判定手段143や警報領域情報138に相当する構成は3次元位置計測手段500で備えているものとする。
【0073】
また、実施の形態3において、電波送受信手段200a側の長さ方向のターゲット400の位置をZ1、ターゲット400への距離をR1とし、電波送受信手段200b側の長さ方向のターゲット400の位置をZ2、ターゲット400への距離をR2とする。
【0074】
3次元位置計測手段500は、上述したように、それぞれのセンサ100a,100bで求められたターゲット400の電波送受信手段200a,200bの長さ方向の位置Z1,Z2と、電波送受信手段200a,200bからの距離R1,R2とに基づいて、ターゲット400の3次元位置を求め、この3次元位置に基づいてターゲット400の接近判定を行い、接近情報として接近の有無や電波送受信手段200a,200bとターゲット400との距離を警報器300に出力するものである。警報器300については実施の形態1または実施の形態2と同様である。
【0075】
次に、実施の形態3の動作について説明する。
それぞれの漏洩ケーブル201a,211aおよび漏洩ケーブル201b,211bを用いたターゲット400の電波送受信手段200a,200bの長さ方向の位置Z1,Z2および距離R1,R2の求め方は実施の形態1または実施の形態2における位置Zおよび距離Rの場合と同様である。
【0076】
3次元位置計測手段500には、センサ100aから、接近の有無、位置Z1、距離R1の情報を含む第1の接近情報が、センサ100bから、接近の有無、位置Z2、距離R2の情報を含む第2の接近情報が入力される。これにより、3次元位置計測手段500は、漏洩ケーブル201a,211aと漏洩ケーブル201b,211bの配置を基準に、第1および第2の接近情報として得られる距離Z1,Z2,R1,R2からターゲット400の3次元位置を計測することが可能となる。
【0077】
例えば、図9に示す構成の場合は次式により3次元位置を計測することが可能である。
【数2】
【0078】
3次元位置計測手段500は、ターゲット400の3次元位置を計算すると、求めたz,y,hと、予め定めておいた空間的な警報領域の値とを比較する。そして、この警報領域内にターゲットの3次元位置が入ったときに接近有りとしてターゲット400の3次元位置とを含む接近情報を警報器300に出力する。これにより、警報器300は、警報を出力すると共に、ターゲット400の3次元位置を表示する。
【0079】
以上のように、実施の形態3の接近検知システムによれば、周波数によって放射指向性が変化するケーブル状の電波送信手段と、電波送信手段に対し略平行に敷設され、電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、電波受信手段で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット毎に分類し、ターゲットの位置について、電波送受信手段の長さ方向の位置と電波送受信手段からの距離とを算出する演算手段とを複数組備えると共に、複数組の電波送受信手段、計測手段および演算手段によって得られた複数組のターゲットの位置と距離とに基づいて、ターゲットの3次元位置を測定する3次元位置計測手段とを備えたので、ターゲットの3次元位置を計測することが可能となる。これにより、例えば、3次元的な細かい警報領域を設定することができ、また、上空からの侵入なのか、地上からの侵入なのかといった区別をすることも可能となる。
【0080】
尚、上記各実施の形態では、ケーブル状の電波送信手段とケーブル状の電波受信手段とからなる電波送受信手段200,200a,200bは、略直線状に配置されているとして説明したが、若干、曲線状に配置されている場合であっても同様に適用することができる。このような曲線状に配置されている場合、ターゲット400の位置は、電波送受信手段200,200a,200bの長さ方向の位置Z,Z1,Z2と、この位置Z,Z1,Z2を通る法線におけるターゲット400と電波送受信手段200,200a,200bとの距離R,R1,R2として求めることができる。
【図面の簡単な説明】
【0081】
【図1】この発明の実施の形態1による接近検知システムを示す構成図である。
【図2】この発明の実施の形態1による接近検知システムの漏洩ケーブルの放射指向性特性を示す説明図である。
【図3】この発明の実施の形態1による接近検知システムの記憶部のデータと制御部との関係を示す説明図である。
【図4】この発明の実施の形態1による接近検知システムの動作原理を示す説明図である。
【図5】この発明の実施の形態1による接近検知システムの計測手段の動作を示すフローチャートである。
【図6】この発明の実施の形態1による接近検知システムのターゲットが複数存在する場合の動作原理の説明図である。
【図7】この発明の実施の形態1による接近検知システムの各伝搬遅延時間で観測される反射波強度の時間履歴を示す説明図である。
【図8】この発明の実施の形態2による接近検知システムの計測手段の動作を示すフローチャートである。
【図9】この発明の実施の形態3による接近検知システムの構成と動作原理を示す説明図である。
【符号の説明】
【0082】
100,100a,100b センサ、141 計測手段、142 演算手段、143 接近判定手段、200,200a,200b 電波送受信手段、201,201a,201b 漏洩ケーブル(電波送信手段)、211,211a,211b 漏洩ケーブル(電波受信手段)、300 警報器、400,401,402 ターゲット、500 3次元位置計測手段。
【技術分野】
【0001】
この発明は、ケーブル状の電波送受信手段を用いてターゲットの位置を検出する接近検知システムに関するものである。
【背景技術】
【0002】
今日、漏洩ケーブルといった漏洩伝送路を用いてターゲットの接近を検知する接近検知システムが知られている。従来、このような接近検知システムとして、例えば、漏洩伝送路を監視したい敷地周辺に配置し、このような漏洩伝送路によって電波の送受信を行い、ターゲットが漏洩伝送路に近づくことで生じる電界変動に基づいてターゲットを検知するようにしたものがあった(例えば、特許文献1参照)。
【0003】
また、上記のような構成に加えて、漏洩伝送路から離れた方向の位置も検知することができるようにしたものがあった(例えば、特許文献2参照)。これは、漏洩伝送路から遠方端に電波を反射する反射器を設置した構成で実現したものである。
【0004】
更に、送信側に周波数によって放射指向性が変化する漏洩同軸ケーブルを用い、異なる周波数で交互に観測し、送信用漏洩ケーブルと受信用漏洩ケーブルで挟まれた面内に存在するターゲットを、観測距離差を利用してその位置を特定するようにしたものがあった(例えば、特許文献3参照)。
【0005】
【特許文献1】特開平10−95338号公報
【特許文献2】国際公開第05/013223号パンフレット
【特許文献3】特開2004−125604号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来のシステムでは次のような問題があった。
例えば、特許文献1に示されたようなシステムでは、ターゲットの漏洩伝送路方向の距離しか測定できず、漏洩伝送路から離れる方向の距離を算出することはできない。そのため、遠くの物体で本来検知したくない場合でも、その物体サイズが大きく、反射波のレベルが大きい場合、誤って誤検知する問題があった。
【0007】
また、特許文献2に示されたようなシステムでは、1つのターゲットのみについて漏洩伝送路に対し離れた方向の位置を測定することが可能だが、複数のターゲットを個別に位置測定することが出来ない問題があった。例えば、2つのターゲットが存在した場合、2つのターゲットの反射波が合成され漏洩伝送路の開放端で反射する。そのため、2つのターゲットの個々の直角方向の距離は区別が付かなくなる。更に、特許文献2のようなシステムでは、ターゲットが漏洩伝送路から遠くないと、直角方向の距離が分からないという問題もあった。これは、遠端結合波の信号成分より遠方に現れるターゲット成分を観測して直角方向の距離を算出しているが、遠端結合波は非常に強いため、ターゲットが漏洩伝送路からかなり離れていないと、ターゲットの成分が遠端結合波に覆い隠されて検出できないためである。
【0008】
また、特許文献3に示されたようなシステムにおいても、複数のターゲットが入った場合には、正確に計測できない問題があった。更に、このようなシステムでは、原理的に2本の漏洩同軸ケーブルの間に存在するターゲットしか検知できないため、2本の漏洩同軸ケーブルより外側のターゲットに対しては動作の保証がなく、ターゲットの位置検知もできないという問題があった。しかも、特許文献3のシステムでは、使用する周波数の選び方が悪いと、漏洩ケーブルから全く電波が出力されないことや、複数の方向に同時に電波が出力される等の現象が発生する。そして、このような周波数で測定を行うとターゲット位置を計測できない問題があった。
【0009】
この発明は上記のような課題を解決するためになされたもので、ターゲットがどのような位置に存在していても、これを確実に検知することのできる接近検知システムを得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る接近検知システムは、周波数によって放射指向性が変化するケーブル状の電波送信手段および電波受信手段とからなる電波送受信手段と、電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、電波受信手段で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット毎に分類し、分類した計測情報を基に、ターゲットの位置について、電波送受信手段の長さ方向の位置と電波送受信手段からの距離とを算出する演算手段とを備えたものである。
【発明の効果】
【0011】
この発明の接近検知システムは、電波送信手段の指向性が周波数に依存することを利用し、ターゲットに対して複数の方向から電波を放射してその反射波を観測し、演算手段によって、電波送受信手段の長さ方向のターゲットの位置と距離とを算出するようにしたので、ターゲットが電波送受信手段に対してどのような位置関係にあっても、確実にターゲットの存在を検知することができ、また、ターゲットが複数存在してもこれらを個別に位置検知することができる。
【発明を実施するための最良の形態】
【0012】
実施の形態1.
図1は、この発明の実施の形態1による接近検知システムを示す構成図である。
図において、接近検知システムは、センサ100、電波送受信手段200、同軸ケーブル202,212、終端器203,213、警報器300を備えている。
センサ100は、電波送受信手段200を用いて、ターゲット400の位置を検出するものであり、信号発生手段110、信号受信手段120、記憶部130、制御部140を備えている。ここで、信号発生手段110は、正弦波発生器111と増幅器112を備え、信号受信手段120は、フィルタ121、増幅器122、直交復調器123を備えている。また、制御部140は、計測手段141、演算手段142、接近判定手段143を備えている。更に、電波送受信手段200は、電波送信手段を実現する漏洩ケーブル201と電波受信手段を実現する漏洩ケーブル211から構成されている。
【0013】
信号発生手段110において、正弦波発生器111は、制御部140からの命令に従い、命令された周波数の正弦波を発生し、増幅器112に出力するものである。増幅器112は、正弦波発生器111の出力を所定のレベルまで増幅し、同軸ケーブル202を介して電波送受信手段200の漏洩ケーブル201に送出するものである。
信号受信手段120において、フィルタ121は、同軸ケーブル212を通って入力される信号から、漏洩ケーブル201が放射するスペクトルとは異なる、不要なスペクトルの信号を除去するフィルタである。増幅器122は、フィルタ121から出力された信号を所定のレベルまで増幅する増幅器である。
【0014】
直交復調器123は、正弦波発生器111の信号を基準に、受信用の漏洩ケーブル211における受信信号を直交検波するものである。ここで直交検波とは、I/Q検波とも呼ばれるものであって、基準信号に対して、漏洩ケーブル211から入力される受信信号をIn−Phase成分(以下、I成分と呼ぶ)とQuadrature成分(以下、Q成分と呼ぶ)に分けるものである。また、直交検波によって、正弦波信号が除去され、ベースバンド成分が出力される。
【0015】
尚、直交復調器123の出力段には図示しない低域通過フィルタ(LPF)が入っており、高周波帯のスペクトルは除去されて、必要な低周波帯(ベースバンド成分)のみが出力されるように構成されている。更に、直交復調器123には図示しないA/D変換器を備えており、ディジタル変換されたベースバンド成分であるI成分とQ成分を出力するよう構成されている。
【0016】
記憶部130は、信号受信手段120から出力された信号データを保持すると共に、制御部140における計測手段141〜接近判定手段143の処理データを保持するための記憶部である。尚、これらデータの詳細については後述する。
【0017】
制御部140は、CPUやメモリ等からなり、センサ100における各部の制御を司るものである。計測手段141は、漏洩ケーブル201から複数の周波数帯域の電波を送信したときに、ターゲット400で反射され、漏洩ケーブル211で受信される複数の周波数帯域の電波に基づいて、各周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力するものである。演算手段142は、計測手段141から出力される計測情報における各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット400毎に分類し、分類した計測情報を基に、ターゲット400の位置について、電波送受信手段200の長さ方向の位置(長手方向の距離)Zと電波送受信手段200からの距離Rを算出するものである。
【0018】
接近判定手段143は、演算手段142で算出された値と予め定められた所定の警報領域の情報とに基づいてターゲット400の接近の有無を判定し、この接近の有無や位置Z、距離Rを含む接近情報を警報器300に出力するものである。尚、これら計測手段141、演算手段142および接近判定手段143は、それぞれの機能に対応したソフトウェアと、これらのソフトウェアを実行するためのCPUやメモリといったハードウェアから構成されるものである。
【0019】
電波送受信手段200において、漏洩ケーブル201,211は、それぞれ周波数によって放射指向性が変化するケーブル状の電波送信手段および電波受信手段である。これら漏洩ケーブル201,211は、例えば漏洩同軸ケーブル(LCX:Leaky CoaXial cable)や漏洩導波管を利用してもよい。ここで、漏洩同軸ケーブルや漏洩導波管は、外皮導体に開けられたスロットにより電波を漏洩する。このとき、スロット間隔によって放射指向性が発生し、その角度は周波数に依存する。周波数と放射指向性の関係は図2に示す。尚、図2中の基本モードや高次モードといった項目については後で詳述する。
【0020】
同軸ケーブル202,212は、それぞれセンサ100と電波送受信手段200とを接続するための信号伝送路を構成するケーブルである。また、終端器203,213は、それぞれ漏洩ケーブル201,211のセンサ100とは反対側の端(以下、遠端と呼ぶ)に接続され、これら漏洩ケーブル201,211における信号を吸収するためのものである。即ち、同軸ケーブル202から漏洩ケーブル201に入力された信号は、この漏洩ケーブル201から空間中に電波として送信される。そして、送信されなかった信号は終端器203によって吸収される。
【0021】
また、漏洩ケーブル201から送信した電波は、ターゲット400で反射し、その反射した電波である反射波は漏洩ケーブル211で受信される。漏洩ケーブル211は、一般的には漏洩ケーブル201とほぼ平行に配置するが、完全に平行にする必要はなく、部分的に相互の間隔が広がったり、狭くなったりしてもよい。ただし、漏洩ケーブル201と漏洩ケーブル211との敷設間隔は、観測に利用する周波数帯域幅によって定まる測距精度に対し狭くする必要がある。測距精度より敷設間隔を広げると、「ケーブル状の電波送信手段」と「ケーブル状の電波受信手段」からなる電波送受信手段200の長さ方向のターゲットの位置Zと電波送受信手段200から離れる方向の距離Rが精度よく求められなくなる。例えば観測に利用する周波数帯域幅が10MHzであった場合、測距精度は光速÷(2×帯域幅)=3×10^8÷(2×10×10^6)=15mとなり、この間隔より狭くする必要がある。
【0022】
漏洩ケーブル211の遠端に接続された終端器213は、漏洩ケーブル211が受信した信号の内の、終端器213側に向かって伝搬する信号を吸収するためのものである。また、漏洩ケーブル211が受信した信号の内のセンサ100側に向かって伝搬する信号は、同軸ケーブル212を通って、信号受信手段120に入力されるよう構成されている。
【0023】
警報器300は、例えばディスプレイ等の表示手段とスピーカ等の音声出力手段とを備え、接近判定手段143から出力される接近情報に基づいて、警報を鳴らし、かつ、接近位置である電波送受信手段200とターゲット400の位置Zや距離Rを表示するよう構成されている。
【0024】
次に、実施の形態1の動作について説明する。先ず、記憶部130に記憶されるデータについて説明する。
図3は、記憶部130に記憶されるデータと制御部140における各手段との関係を示す説明図である。
信号受信手段120の直交復調器123の出力であるI成分とQ成分は、図3中に示すように直交検波結果131として記憶部130に記憶される。計測手段141は、直交検波結果131、即ちI成分とQ成分を参照して、侵入物情報136を出力するが、その処理は次の通りである。
【0025】
侵入物情報136とは電波送受信手段200に接近するターゲット400による反射波の信号の振幅と送信してから受信されるまでの伝搬遅延時間である。尚、この計測を実現する方法にはUWB(ウルトラワイドバンド)で利用されるパルス方式、FM−CW方式、スペクトル拡散方式等があるが、ここでは周波数チャープ方式での構成方法を説明する。
【0026】
計測手段141は信号発生手段110の正弦波発生器111に対して発振周波数を設定し、このとき観測される直交検波結果131を記憶部130の周波数軸データ列132に記憶させる。そして、設定する発振周波数を徐々に変化させていき、それぞれの直交検波結果131を列に並べて記憶部130に記憶させる。すると、記憶部130には各周波数に対する直交検波結果131である周波数軸データ列132が出来上がる。この周波数軸データ列132はI成分とQ成分の列であるが、数値計算上、I成分を実数、Q成分を虚数として扱う。よって、この周波数軸データ列132を複素数として逆フーリエ変換することができ、逆フーリエ変換して得られる時間軸データ列133を記憶部130に記憶させる。この時間軸データ列133は、いわゆるパルス波を送信したときのインパルスレスポンスに相当するもので、この時間軸データ列にはターゲット400で反射した電波の情報が含まれている。そのため、ターゲット400で反射した電波の情報を得るには、予め取得しておいた、ターゲット400が無い、初期状態における時間軸データ列を基準に差分をとればよい。
【0027】
記憶部130には、そのように、予め取得しておいた初期状態における基準時間軸データ列134を記憶しておき、計測手段141は、基準時間軸データ列134と時間軸データ列133の差分を取ることでターゲット時間軸データ列135を得る。このターゲット時間軸データ列135には、信号発生手段110が信号を出力してから信号受信手段120で受信されるまでの伝搬遅延時間に相当する時間位置にピークが現れる。即ち、パルス波を送信して、ターゲット400に当ったパルス波が時間遅延して戻ってくる波形が現れる。ここで、ターゲット400が複数あった場合、それぞれのターゲット400に対応するピークが現れる。そのため、予め定めておいた閾値を越えるピークを全て抽出し、各ピークの大きさである振幅と位相と伝搬遅延時間を抽出する。
【0028】
さて、計測手段141は信号発生手段110の正弦波発生器111に対し発振周波数を設定しながら周波数軸データ列132を取得し、上記の、送信してから受信されるまでの伝搬遅延時間と振幅を得る工程を別の周波数範囲においても行う。すると、振幅と位相と伝搬遅延時間が2セット得られ、この2組の振幅と位相と伝搬遅延時間からなる侵入物情報136を計測手段141は記憶部130に出力する。
【0029】
この動作の意味を図4を用いて説明する。
漏洩ケーブル201,211は、周波数によって放射指向性が変化する特性がある。そのため、図4(a)に示すように、周波数F1の放射角511、周波数F2の放射角512において、放射角の中央の角度が90度となる周波数F1,F2を選ぶ。この周波数F1からF2に掛けて計測手段141でターゲット時間軸データ列135を取得し、そこから伝搬遅延時間521を得る。また、周波数F3の放射角513、周波数F4の放射角514において、放射角の中央の角度が45度となる周波数F3,F4を選ぶ。この周波数F3からF4に掛けて計測手段141でターゲット時間軸データ列135を取得し、そこから伝搬遅延時間522を得る。伝搬遅延時間521は、図4(b)に示すように、
T1=2×(t1+t2) (1)
であり、伝搬遅延時間522は、図4(c)に示すように、
T2=2×(t1+t3+t4) (2)
である。尚、図4(b),(c)において、ターゲット時間軸データ列135における波形のピークは反射波を示している。
【0030】
漏洩ケーブル201,211の中は空気中と誘電率が異なるため、電波の速度が遅くなり、波長が短縮する。この短縮率を波長短縮率(以下、Kとする)という。また、電波の速度が遅い分、電気的な長さが1÷波長短縮率だけ長くなる。これらの点を考慮し、図4(a)〜(c)から
t2=t3÷K (3)
t2=t4cos(45°)=t4÷(√2) (4)
の関係なども導かれる。
【0031】
これらの連立方程式を解くことで、t1とt2が求められる。この計算は演算手段142で行われるが、t1とt2が分かれば、ケーブル状の電波送信手段とケーブル状の電波受信手段からなる電波送受信手段200の長さ方向のターゲット400の位置Zと、その位置における電波送受信手段200とターゲット400との距離Rを算出することが可能となる。
【0032】
次に、周波数F1,F2と周波数F3,F4の範囲について説明する。
一般に周波数範囲を広げるほど、時間波形でのインパルスレスポンスが鋭くなるため、ターゲットの測距精度は向上する。しかし、漏洩ケーブルを用いているため周波数範囲を広げると放射角度範囲が広がる。そのため、逆にターゲット像がボケてしまう。また、図2の「II」の範囲で示すように、漏洩ケーブルは周波数が高いと複数の方向に指向性が向く高次モードが存在する。ここでは、ターゲット時間軸データ列135の各要素の大きさを時間の早い方から順に調べて行き、最初に現れるピークをターゲットとしているため、複数の方向に電波が放射されると、1つのターゲットにつき複数のピークが存在することになり、計算が成り立たなくなる。そのため、放射方向が1つしか存在しない周波数帯の中、つまり図2の「I」の範囲から周波数F1,F2と周波数F3,F4を選ぶ。また、本発明において、図2の「I」の範囲を、基本モード領域と称することとする。
【0033】
放射方向が1つしか存在しない周波数帯は、漏洩同軸ケーブルや漏洩導波管の外皮導体に開けられたスロットのピッチと波長短縮率によって次式の範囲となる。
(1/K+1)/2<使用周波数/スロットピッチ<1/K+1
尚、上式については既知であるため、導出方法等の説明は省略する。
【0034】
さて、ターゲットの位置計測精度を上げたい場合、できるだけ、2つの角度の差を広くしたい。ところで、先の説明では、放射角を、例えば90度と45度に選んだ。このとき、このままの角度で遠端付近にターゲット400が入った場合、測定精度が著しく劣化する。遠端付近では残りの漏洩ケーブル201,211が短いため、45度の放射電波が弱くなるためである。これを回避する方法として、遠端付近は135度と90度の組合せで観測する方法がある。つまり、周波数の組合せを変えて観測することで、漏洩ケーブル201,211の端の部分でも測定精度を落とすことなく、ターゲット400の測定が可能となる。
【0035】
ところで、上記使用周波数の範囲は通常の漏洩同軸ケーブルではそれほど厳密に管理されない。なぜなら、通常の漏洩同軸ケーブルでは放送を主な目的としており、漏洩同軸ケーブルの周辺に電波が放射されれば目的が達成できるためである。しかし、本発明で求める位置の測定には放射の方向の確度や放射方向の数が重要な要素となる。
【0036】
次に、計測手段141による具体的な計測処理について説明する。
図5は、計測手段141の動作例を示すフローチャートである。
先ず、処理回数カウント、また周波数軸データ列132の書き込み位置、時間軸データ列133の書き込み位置の初期化を行う(ステップST101)。次に、処理回数カウントを検査し、1回目であればステップST103へ、2回目であればステップST104へ移る。ステップST103では、周波数F1の値を周波数設定変数に、周波数F2の値を終了確認変数にセットし、ステップST105へ移る。ステップST104では、周波数F3の値を周波数設定変数に、周波数F4の値を終了確認変数にセットし、ステップST105へ移る。
【0037】
ステップST105では、信号発生手段110の正弦波発生器111に対し周波数設定変数の値を設定する。設定後に次回設定のための周波数設定変数を終了確認変数の値に向け少しずれた周波数に更新する。次に、記憶部130の直交検波結果131が更新されるのを待ち、更新されたら、直交検波結果131を周波数軸データ列132に書き込む(ステップST106)。I成分は実部、Q成分は虚部とする。書き込み後に、次回の書き込み位置を更新する。
【0038】
次に、ステップST107において、周波数設定変数が終了確認変数を越えたかどうか確認し、越えてなければステップST105に戻り、越えていればステップST108に進む。ステップST108では、周波数軸データ列132の値をフーリエ変換処理し、時間軸データ列133に書き込む。書き込み後に、次回の処理のため、周波数軸データ列132の書き込み位置、時間軸データ列133の位置を処理回数毎に区別できる位置に初期化する。
【0039】
次に、ステップST109において、処理回数カウントを調べ、処理回数カウントが1回目であれば、処理回数カウントを2回目にして(ステップST110)、ステップST102へ戻り、処理回数カウントが2回目であればステップST111へ移る。ステップST111では、予め取得しておいた、基準時間軸データ列134と時間軸データ列133の差分をとり、ターゲット時間軸データ列135に書き込む。基準時間軸データ列134と時間軸データ列133はそれぞれ周波数F1からF2とF3からF4に対応する2組のデータ列が入っているため、それぞれのデータ列で差分をとり、2組のターゲット時間軸データ列135を得る。
【0040】
次に、ステップST112では、2組のターゲット時間軸データ列135から予め定めておいた閾値を越えるピークを全て抽出し、各ピークの大きさである振幅と位相と伝搬遅延時間を抽出し侵入物情報136として記憶部130に出力する。侵入物情報136は2組できる。
以上で、計測手段141による処理は終了し、次に演算手段142に移る。
【0041】
上述したように、演算手段142は、ターゲット400の侵入物情報136をターゲット400毎に分類し、分類した計測情報を基に、ターゲット400の位置について、電波送受信手段200の長さ方向のターゲット400の位置Zと電波送受信手段200との距離Rを算出するものである。ここで、ターゲット400が複数あった場合、演算手段142は、2組の侵入物情報136の各組間でターゲット毎の組合せを決定する必要がある。例えば、2つのターゲットがあった場合、それぞれの侵入物情報136の各組には2つのターゲットに関する情報がある。よって、この組合せを誤るとターゲット位置は全く誤ったものとなる。
【0042】
この組合せを方法は、単純なものには侵入物情報136の中の振幅を用いる方法がある。即ち、振幅値が近いもの同士で組合せる方法である。しかし、ターゲットが漏洩ケーブルに近いと振幅値は近い値となるが、遠いとその差はひらく。様々な距離に複数のターゲットがあった場合、組合せを誤る危険がある。しかし、漏洩ケーブルに近いと振幅値は近い値となり、伝搬遅延時間もほぼ同じ値になる。そのため、組合せ精度は向上し、接近検知システムとしては問題とならない。
【0043】
但し、より精度を向上させるため、振幅と位相の時間変化を利用する。
振幅、位相の時間微分値が単純な例であるが、信号が変化するタイミングや振幅、位相の時間変化をフーリエ変換などで周波数解析する方法が有効である。
図6は2つのターゲットの観測状況を説明する図であり、ターゲット401と402による観測状況を示している。
周波数F1からF2の観測ではターゲット時間軸データ列135として、反射波Aと反射波Bの2つの反射波を検出する(図6(b)参照)。また、周波数F3からF4の観測ではターゲット時間軸データ列135として、反射波Cと反射波Dの2つの反射波を検出する(図6(c)参照)。次に、反射波Aの伝搬遅延時間521と、反射波Bの伝搬遅延時間523と、反射波Cの伝搬遅延時間522と、反射波Dの伝搬遅延時間524との間で、各ターゲット401,402に対応した伝搬遅延時間の組合せを分類する。
【0044】
この分類には先ほど説明したように、振幅を用いる方法がある。
振幅で比較すれば、反射波A<反射波B、反射波C<反射波Dの関係があり、(反射波Aと反射波C)、(反射波Bと反射波D)の分類ができる(図6(b),(c)における破線部分530,540参照)。
【0045】
また、振幅だけでは、誤分類する恐れがあるので、信号が変化するタイミングも利用することができる。
図7は、各伝搬遅延時間で観測される反射波強度の時間履歴の図である。
図中、(a)〜(d)がそれぞれ反射波A〜反射波Dの波形に対応している。
図7において、反射波A(a)と反射波C(c)が同時に立ち上がって、信号の変化が起こっている。また、反射波B(b)と反射波D(d)が同時に立ち上がって、信号の変化が起こっている。よって、(反射波Aと反射波C)、(反射波Bと反射波D)の分類ができる。また、各信号が立ち上がっている頂点部分で反射波Aと反射波Cは細かく変動し、また、反射波Aと反射波Cは大きく緩やかに変動している。この違いは変動周波数として周波数解析をすることで容易に検出でき、変動周波数同士の組合せでも分類できる。
このように、各ピークの立ち上がりタイミングによる分類や、時間変化を周波数解析し、同じ周波数同士で組合せる分類を行うことで精度の高い組合せの抽出が可能となる。
【0046】
以上説明した組合せにより、演算手段142は、ターゲット400に応じた伝搬遅延時間T1とT2を得る(図4に示す場合)。このT1とT2からターゲット400の位置を計算する。この計算には先に説明した式(1)から式(4)の連列方程式を解くことによって得られる次の式(5),式(6)を用いてt1とt2を得る。
t1=T1÷2−(T2−T1)÷(2×(K+√2−1)) (5)
t2=(T2−T1)÷(2×(K+√2−1)) (6)
【0047】
ここで、T1とは周波数F1からF2を用いて求められた、侵入物情報136の1番目に記憶されている伝搬遅延時間であり、T2とは周波数F3からF4を用いて求められた、侵入物情報136の2番目に記憶されている伝搬遅延時間である。
t1は、図4(a)に示すように電波送受信手段200のセンサ100側から、ターゲット400から電波送受信手段200に下ろした垂線の交点までの距離、つまり電波送受信手段200の長さ方向のターゲットの位置Zまで信号が伝搬する時間である。また、t2は、上記交点とターゲット400の距離、つまり電波送受信手段200とターゲット400間の距離Rを信号が伝搬する時間である。
【0048】
そして、位置Z、距離Rはt1,t2から次の式(7)、式(8)を用いて求められる。
Z=t1×K×C (7)
R=t2×C (8)
ここで、Cは光速(=3×10^8)である。
演算手段142は、このような演算を行うことで、位置Z、距離Rからなる侵入物位置情報137を記憶部130に出力する。
【0049】
次に、接近判定手段143の動作について説明する。
上述したように、接近判定手段143は、侵入物位置情報137を用いて、ターゲット400の接近を検知する。これは予め記憶部130の警報領域情報138で示された範囲内にターゲット400の位置Z、距離Rが入っているかを探査することで実行される。
警報領域情報138には電波送受信手段200にある一定以上近づくターゲットを全て検知するには、距離Rの閾値だけを設定すればよい。また、例えば、入出門のように、接近通過が許される部分なども位置Z、距離Rの警報範囲を細かく指定すれば実現できる。更に、時計と組合せて、日中と夜間で検知範囲を変更することも出来る。
接近判定手段143は、ターゲット400が警報領域情報138で設定された範囲に侵入した場合、接近情報として接近の有無、位置Z、距離Rを警報器300に出力する。警報器300は、接近情報から接近有りを検出すると、所定の警報音を発生させ、かつ、接近位置である位置Z、距離Rを表示する。
【0050】
ところで、送信周波数F1,F2,F3,F4は様々な組合せで観測することが望ましい。なぜなら、先にも説明したように、例えば、90度と45度に選んだとき、このままの角度で遠端付近にターゲット400が入った場合、測定精度が著しく劣化するためである。
【0051】
周波数を変えて、放射方向を変えた場合、式(5)、式(6)の代わりに次式を用いる。
【数1】
【0052】
ここで、θ1=π/2、θ2=π/4とすると式(9)は式(5)と一致し、式(10)は式(6)と一致する。更に、送信周波数の組合せを常に変化させることにより、一部の周波数が電波妨害等で利用できなくとも、別の周波数で観測できるなど、妨害に強くなり、セキュリティシステムとしての価値も向上する。また、漏洩ケーブル201,211の端の部分でも測定精度を落とすことなく、ターゲット400の測定が可能となる。
【0053】
更に、周波数の組合せを変化させることで、複数ターゲットを観測したときに現れる、複数のピークの組合せを根本的に解決する方法がある。それは、2つの周波数の組合せを初めは同じか近い値にしておいて、徐々に広げながら観測するのである。そうすると、複数のピークは、2組の侵入物情報136の各組間で最初は同じ伝搬遅延時間だったものが、少しずつその差が開いていく。そうすれば、組合せを誤る心配もなく、必要な測定精度が得られる程度に差が開いたところで、位置を計算すればよい。
【0054】
また、少しずつ2つの周波数の組合せを開いていくことに時間が掛かる場合は、周波数軸データ列を十分に広い範囲で取得しておき、その中から必要な周波数を抜き出して、その後の処理を行えば、計測行為は1回で済み、後は計算だけなので、非常に高速に、かつ高精度な位置計測が可能となる。
【0055】
尚、上記実施の形態1では、ターゲットの反射波の振幅と伝搬遅延時間を測定するのに、周波数チャープ方式で、信号発生手段と信号受信手段と計測手段を構成した。しかし、この計測を実現する方法にはUWB(ウルトラワイドバンド)で利用されるパルス方式、FM−CW方式、スペクトル拡散方式等も利用可能であり、それらを用いても構わない。但し、送信周波数のスペクトルの周波数範囲は、所定の式で示される範囲内(基本モード領域の範囲内)とする必要がある。
【0056】
以上のように、実施の形態1の接近検知システムによれば、周波数によって放射指向性が変化するケーブル状の電波送信手段と、電波送信手段に対し略平行に敷設され、電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、電波受信手段で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット毎に分類し、分類した計測情報を基に、ターゲットの位置について、電波送受信手段の長さ方向の位置と電波送受信手段からの距離とを算出する演算手段とを備えたので、ターゲットが電波送受信手段に対してどのような位置関係にあっても、確実にターゲットの存在を検知することができ、また、ターゲットが複数存在してもこれらを個別に位置検知することができる。
【0057】
また、実施の形態1の接近検知システムによれば、電波送信手段から送信される電波の周波数帯域は、電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が単一である基本モード領域の範囲であり、かつ、基本モード領域の範囲で、電波送信手段に対して複数の周波数帯域の信号が与えられるようにしたので、漏洩ケーブルの高次モードによる複数方向への電波の放射を防ぎ、確実かつ正確にターゲットを検出できる。
【0058】
また、実施の形態1の接近検知システムによれば、警報を出力する警報器を備え、所定の警報領域内にターゲットが存在した場合は、前記警報器から警報を発生させるようにしたので、予め指定した警報領域内にターゲットが侵入した場合でも、容易にその事態を認識することができる。
【0059】
実施の形態2.
実施の形態2は観測に利用する周波数範囲として高次モード領域(これについては後述する)を用いるようにしたものである。
【0060】
図面上の構成は、実施の形態1と同様であるため図1〜図4を援用して説明する。実施の形態2における計測手段141は、信号発生手段110に対して漏洩ケーブル201,211における高次モード領域の範囲内の周波数を出力するよう指示する点が実施の形態1とは異なる点である。即ち、漏洩ケーブル201から送信される電波の周波数が次の示される範囲となるよう信号発生手段110に指示する。
使用周波数/スロットピッチ<(1/波長短縮率+1)/2
これは、図2における「II」の領域にあたるもので、この領域の周波数を用いると漏洩ケーブル201から複数の方向に電波が放射される。本発明では、図2における「II」の領域を高次モード領域と称することとする。尚、上式についても既知であるため、ここでの詳細な説明は省略する。
【0061】
その他のセンサ100内における各部の構成は実施の形態1と同様であるため、ここでの説明は省略する。
【0062】
次に、実施の形態2の接近検知システムの動作について説明する。
本実施の形態では、1つの周波数範囲だけでターゲット400を観測し、ケーブル状の電波送信手段とケーブル状の電波受信手段からなる電波送受信手段200の長さ方向のターゲットの位置Zと電波送受信手段200との距離Rを求める。
【0063】
ターゲット400の観察に利用する周波数帯は、図2における「II」の領域であるため、適切な周波数F5からF6を選択すると、同時に2つの角度でターゲット400を観測できる。そのため、計測手段141で実行する周波数軸データ列132の取得は1回でよい。その代わり、フーリエ変換後に基準時間軸データ列134との差分で得られるターゲット時間軸データ列135には2つのピークが現れる。このピークがそれぞれの角度による観測結果に対応する。よって、この2つのピークを測定し、伝搬遅延時間T1とT2を得る。以下、計測手段141の動作を詳細に説明する。
【0064】
図8は、計測手段141の動作を示すフローチャートである。
先ず、ステップST201において、周波数軸データ列132の書き込み位置、時間軸データ列133の書き込み位置の初期化を行う。また、周波数F5の値を周波数設定変数に、周波数F6の値を終了確認変数にセットする。尚、これら周波数F5,F6の値は、図2に示すように、上述した高次モード領域の周波数である。
【0065】
次に、ステップST202において、信号発生手段110の正弦波発生器111に対し周波数設定変数の値を設定する。設定後に次回設定のための周波数設定変数を終了確認変数の値に向け少しずれた周波数に更新する。次に、ステップST203において、記憶部130の直交検波結果131が更新されるのを待ち、更新されたら、直交検波結果131を周波数軸データ列132に書き込む。I成分は実部、Q成分は虚部とする。書き込み後に、次回の書き込み位置を更新する。
【0066】
次に、ステップST204において、周波数設定変数が終了確認変数を越えたかどうか確認し、越えてなければステップST202に戻り、越えていればステップST205に進む。ステップST205では、周波数軸データ列132の値をフーリエ変換処理し、時間軸データ列133に書き込む。次に、ステップST206において、予め取得しておいた、基準時間軸データ列134と時間軸データ列133の差分をとり、ターゲット時間軸データ列135に書き込む。
【0067】
次に、ステップST207において、ターゲット時間軸データ列135をそれぞれ時間の早い方から順に実部と虚部の二乗和の平方根である振幅をサーチし、最初に所定の閾値を越えたピークと2番目に所定の閾値を越えたピークを検出し、そのときの時間軸の値と、振幅を侵入物情報136として記憶部130に出力する。侵入物情報136は2組できる。
これで計測手段141の処理は終了し、次に演算手段142の処理に移る。
【0068】
演算手段142は、所定の数式で時間t1とt2を求め、位置ZとRを算出し、侵入物位置情報137を出力する。ここで、放射角度が実施の形態1と同じとは限らないため、実施の形態1で利用した式を利用できるとは限らないが、どのような角度であっても、連立方程式を立てて解くことにより、実施の形態1で示した式(5)、式(6)を導き出すことはできる。例えば、第1の周波数による2種類の角度をθ1およびθ2とすると、式(5)、式(6)に対応する式は、実施の形態1における式(9)および式(10)となる。ここで、θ1=π/2、θ2=π/4とすると式(9)は式(5)と一致し、式(10)は式(6)と一致する。そして、位置Z、距離Rはt1、t2から実施の形態1で示した式(7)、式(8)を用いて求められる。演算手段142は、このような演算を行うことで、位置Z、距離Rからなる侵入物位置情報137を記憶部130に出力する。接近判定手段143は、侵入物位置情報137を用いて、ターゲット400の接近を検知するが、これ以降の動作は実施の形態1と同じであるため、ここでの説明は省略する。
【0069】
尚、上記実施の形態2においても、演算手段142は、図6および図7で示したようなターゲットが複数存在するような場合でも実施の形態1と同様の動作により、複数のターゲット401,402の位置を検出することができる。
【0070】
以上のように、実施の形態2の接近検知システムによれば、電波送信手段から送信される電波の周波数帯域は、電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が複数存在する高次モード領域の範囲であり、かつ、高次モード領域の範囲で、電波送信手段に対して単一の周波数帯域の信号が与えられるようにしたので、1つの周波数で複数の方向からターゲットに電波を放射することができるため、測定にかかる時間を短縮することができる。
【0071】
実施の形態3.
実施の形態3は、実施の形態1または実施の形態2の接近検知システムの構成を複数組備え、ターゲット400の3次元位置を計測するようにしたものである。
【0072】
図9は、実施の形態3の接近検知システムの構成と動作原理を示す説明図である。
実施の形態3の接近検知システムは、2組のセンサや電波送受信手段を備えている。即ち、センサ100a、同軸ケーブル202a,212a、漏洩ケーブル201a,211a、終端器203a,213aからなる一方の組と、センサ100b、同軸ケーブル202b,212b、漏洩ケーブル201b,211b、終端器203b,213bからなる他方の組とを備えている。それぞれの構成は、実施の形態1または実施の形態2におけるセンサ100、同軸ケーブル202,212、漏洩ケーブル201,211、終端器203,213と同様であるため、ここでの説明は省略する。但し、実施の形態3においては、接近判定手段143や警報領域情報138に相当する構成は3次元位置計測手段500で備えているものとする。
【0073】
また、実施の形態3において、電波送受信手段200a側の長さ方向のターゲット400の位置をZ1、ターゲット400への距離をR1とし、電波送受信手段200b側の長さ方向のターゲット400の位置をZ2、ターゲット400への距離をR2とする。
【0074】
3次元位置計測手段500は、上述したように、それぞれのセンサ100a,100bで求められたターゲット400の電波送受信手段200a,200bの長さ方向の位置Z1,Z2と、電波送受信手段200a,200bからの距離R1,R2とに基づいて、ターゲット400の3次元位置を求め、この3次元位置に基づいてターゲット400の接近判定を行い、接近情報として接近の有無や電波送受信手段200a,200bとターゲット400との距離を警報器300に出力するものである。警報器300については実施の形態1または実施の形態2と同様である。
【0075】
次に、実施の形態3の動作について説明する。
それぞれの漏洩ケーブル201a,211aおよび漏洩ケーブル201b,211bを用いたターゲット400の電波送受信手段200a,200bの長さ方向の位置Z1,Z2および距離R1,R2の求め方は実施の形態1または実施の形態2における位置Zおよび距離Rの場合と同様である。
【0076】
3次元位置計測手段500には、センサ100aから、接近の有無、位置Z1、距離R1の情報を含む第1の接近情報が、センサ100bから、接近の有無、位置Z2、距離R2の情報を含む第2の接近情報が入力される。これにより、3次元位置計測手段500は、漏洩ケーブル201a,211aと漏洩ケーブル201b,211bの配置を基準に、第1および第2の接近情報として得られる距離Z1,Z2,R1,R2からターゲット400の3次元位置を計測することが可能となる。
【0077】
例えば、図9に示す構成の場合は次式により3次元位置を計測することが可能である。
【数2】
【0078】
3次元位置計測手段500は、ターゲット400の3次元位置を計算すると、求めたz,y,hと、予め定めておいた空間的な警報領域の値とを比較する。そして、この警報領域内にターゲットの3次元位置が入ったときに接近有りとしてターゲット400の3次元位置とを含む接近情報を警報器300に出力する。これにより、警報器300は、警報を出力すると共に、ターゲット400の3次元位置を表示する。
【0079】
以上のように、実施の形態3の接近検知システムによれば、周波数によって放射指向性が変化するケーブル状の電波送信手段と、電波送信手段に対し略平行に敷設され、電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、電波受信手段で受信される複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、各周波数帯域の反射波の信号強度と位相の情報に基づいて、計測情報をターゲット毎に分類し、ターゲットの位置について、電波送受信手段の長さ方向の位置と電波送受信手段からの距離とを算出する演算手段とを複数組備えると共に、複数組の電波送受信手段、計測手段および演算手段によって得られた複数組のターゲットの位置と距離とに基づいて、ターゲットの3次元位置を測定する3次元位置計測手段とを備えたので、ターゲットの3次元位置を計測することが可能となる。これにより、例えば、3次元的な細かい警報領域を設定することができ、また、上空からの侵入なのか、地上からの侵入なのかといった区別をすることも可能となる。
【0080】
尚、上記各実施の形態では、ケーブル状の電波送信手段とケーブル状の電波受信手段とからなる電波送受信手段200,200a,200bは、略直線状に配置されているとして説明したが、若干、曲線状に配置されている場合であっても同様に適用することができる。このような曲線状に配置されている場合、ターゲット400の位置は、電波送受信手段200,200a,200bの長さ方向の位置Z,Z1,Z2と、この位置Z,Z1,Z2を通る法線におけるターゲット400と電波送受信手段200,200a,200bとの距離R,R1,R2として求めることができる。
【図面の簡単な説明】
【0081】
【図1】この発明の実施の形態1による接近検知システムを示す構成図である。
【図2】この発明の実施の形態1による接近検知システムの漏洩ケーブルの放射指向性特性を示す説明図である。
【図3】この発明の実施の形態1による接近検知システムの記憶部のデータと制御部との関係を示す説明図である。
【図4】この発明の実施の形態1による接近検知システムの動作原理を示す説明図である。
【図5】この発明の実施の形態1による接近検知システムの計測手段の動作を示すフローチャートである。
【図6】この発明の実施の形態1による接近検知システムのターゲットが複数存在する場合の動作原理の説明図である。
【図7】この発明の実施の形態1による接近検知システムの各伝搬遅延時間で観測される反射波強度の時間履歴を示す説明図である。
【図8】この発明の実施の形態2による接近検知システムの計測手段の動作を示すフローチャートである。
【図9】この発明の実施の形態3による接近検知システムの構成と動作原理を示す説明図である。
【符号の説明】
【0082】
100,100a,100b センサ、141 計測手段、142 演算手段、143 接近判定手段、200,200a,200b 電波送受信手段、201,201a,201b 漏洩ケーブル(電波送信手段)、211,211a,211b 漏洩ケーブル(電波受信手段)、300 警報器、400,401,402 ターゲット、500 3次元位置計測手段。
【特許請求の範囲】
【請求項1】
周波数によって放射指向性が変化するケーブル状の電波送信手段と、前記電波送信手段に対し略平行に敷設され、当該電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、
前記電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、前記電波受信手段で受信される前記複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、
前記各周波数帯域の反射波の信号強度と位相の情報に基づいて、前記計測情報を前記ターゲット毎に分類し、分類した計測情報を基に、前記ターゲットの位置について、前記電波送受信手段の長さ方向の位置と前記電波送受信手段からの距離とを算出する演算手段とを備えた接近検知システム。
【請求項2】
電波送信手段から送信される電波の周波数帯域は、当該電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が単一である基本モード領域の範囲であり、かつ、当該基本モード領域の範囲で、前記電波送信手段に対して複数の周波数帯域の信号が与えられることを特徴とする請求項1記載の接近検知システム。
【請求項3】
電波送信手段から送信される電波の周波数帯域は、当該電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が複数存在する高次モード領域の範囲であり、かつ、当該高次モード領域の範囲で、前記電波送信手段に対して単一の周波数帯域の信号が与えられることを特徴とする請求項1記載の接近検知システム。
【請求項4】
周波数によって放射指向性が変化するケーブル状の電波送信手段と、前記電波送信手段に対し略平行に敷設され、当該電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、前記電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、前記電波受信手段で受信される前記複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、前記各周波数帯域の反射波の信号強度と位相の情報に基づいて、前記計測情報を前記ターゲット毎に分類し、分類した計測情報を基に、前記ターゲットの位置について、前記電波送受信手段の長さ方向の位置と前記電波送受信手段からの距離とを算出する演算手段とを複数組備えると共に、
前記複数組の電波送受信手段、計測手段および演算手段によって得られた複数組の前記ターゲットの位置と距離とに基づいて、当該ターゲットの3次元位置を測定する3次元位置計測手段とを備えたことを特徴とする接近検知システム。
【請求項5】
警報を出力する警報器を備え、所定の警報領域内にターゲットが存在した場合は、前記警報器から警報を発生させることを特徴とする請求項1から請求項4のうちのいずれか1項記載の接近検知システム。
【請求項1】
周波数によって放射指向性が変化するケーブル状の電波送信手段と、前記電波送信手段に対し略平行に敷設され、当該電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、
前記電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、前記電波受信手段で受信される前記複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、
前記各周波数帯域の反射波の信号強度と位相の情報に基づいて、前記計測情報を前記ターゲット毎に分類し、分類した計測情報を基に、前記ターゲットの位置について、前記電波送受信手段の長さ方向の位置と前記電波送受信手段からの距離とを算出する演算手段とを備えた接近検知システム。
【請求項2】
電波送信手段から送信される電波の周波数帯域は、当該電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が単一である基本モード領域の範囲であり、かつ、当該基本モード領域の範囲で、前記電波送信手段に対して複数の周波数帯域の信号が与えられることを特徴とする請求項1記載の接近検知システム。
【請求項3】
電波送信手段から送信される電波の周波数帯域は、当該電波送信手段に対して単一の信号を与えた場合に出力される信号の放射方向が複数存在する高次モード領域の範囲であり、かつ、当該高次モード領域の範囲で、前記電波送信手段に対して単一の周波数帯域の信号が与えられることを特徴とする請求項1記載の接近検知システム。
【請求項4】
周波数によって放射指向性が変化するケーブル状の電波送信手段と、前記電波送信手段に対し略平行に敷設され、当該電波送信手段から送信された電波を受信するケーブル状の電波受信手段とからなる電波送受信手段と、前記電波送信手段から複数の周波数帯域の電波を送信したときに、ターゲットで反射され、前記電波受信手段で受信される前記複数の周波数帯域の電波に基づいて、周波数帯域毎の反射波の信号強度と位相と送信してから受信されるまでの伝搬遅延時間とからなる計測情報を出力する計測手段と、前記各周波数帯域の反射波の信号強度と位相の情報に基づいて、前記計測情報を前記ターゲット毎に分類し、分類した計測情報を基に、前記ターゲットの位置について、前記電波送受信手段の長さ方向の位置と前記電波送受信手段からの距離とを算出する演算手段とを複数組備えると共に、
前記複数組の電波送受信手段、計測手段および演算手段によって得られた複数組の前記ターゲットの位置と距離とに基づいて、当該ターゲットの3次元位置を測定する3次元位置計測手段とを備えたことを特徴とする接近検知システム。
【請求項5】
警報を出力する警報器を備え、所定の警報領域内にターゲットが存在した場合は、前記警報器から警報を発生させることを特徴とする請求項1から請求項4のうちのいずれか1項記載の接近検知システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−327883(P2007−327883A)
【公開日】平成19年12月20日(2007.12.20)
【国際特許分類】
【出願番号】特願2006−160090(P2006−160090)
【出願日】平成18年6月8日(2006.6.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年12月20日(2007.12.20)
【国際特許分類】
【出願日】平成18年6月8日(2006.6.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]