
推定方法
【課題】街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法を提供する。
【解決手段】まず、マーカが固定されたカメラを複数、撮影対象地域内に設置する(ステップS101)。次に、設置された複数のカメラのそれぞれにより、撮影対象地域を撮影する(ステップS102)。さらに、複数のマーカが、複数のカメラのそれぞれによる撮影により得られた複数の画像内において撮影されている位置と、撮影対象地域内の特徴点の位置と、から、複数のカメラの撮影対象地域に対する位置ならびに向きを推定する(ステップS105)。ここで、複数の画像内において、マーカが少なくとも3つ撮影されるように、複数のカメラを設置する。
【解決手段】まず、マーカが固定されたカメラを複数、撮影対象地域内に設置する(ステップS101)。次に、設置された複数のカメラのそれぞれにより、撮影対象地域を撮影する(ステップS102)。さらに、複数のマーカが、複数のカメラのそれぞれによる撮影により得られた複数の画像内において撮影されている位置と、撮影対象地域内の特徴点の位置と、から、複数のカメラの撮影対象地域に対する位置ならびに向きを推定する(ステップS105)。ここで、複数の画像内において、マーカが少なくとも3つ撮影されるように、複数のカメラを設置する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法に関する。
【背景技術】
【0002】
従来から、街中を移動する車両等の様子を撮影して、交通量等を計測する技術が提案されている(たとえば、特許文献1参照)。
【0003】
一方で、所定の文字や図形、模様が印刷されたマーカを現実世界の種々の物品に貼付してから当該物品およびその周辺を撮影した画像において、当該マーカが撮影された位置に当該マーカに対応付けられる仮想的なキャラクターや各種の情報を合成するAR(Augmented Reality)技術提案されている(たとえば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−302228号公報
【特許文献2】特開2006−048484号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
たとえば交差点のように、行き交う人や車両が多い状況で交通量を正確に計測するには、複数のカメラで撮影を行って、人や車両の同定を行う必要がある。
【0006】
このような状況で、各カメラを設置した位置や向きを簡単に推定できる方法が強く求められている。
【0007】
本発明は、以上のような課題を解決するもので、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る推定方法は、
マーカが固定されたカメラを複数、撮影対象地域内に設置する設置工程、
前記設置された複数のカメラのそれぞれにより、前記撮影対象地域を撮影する撮影工程、
前記複数のマーカが、前記複数のカメラのそれぞれによる撮影により得られた複数の画像内において撮影されている位置と、前記撮影対象地域内の特徴点の位置と、から、前記複数のカメラの前記撮影対象地域に対する位置ならびに向きを推定する推定工程
を備え、
前記複数の画像内において、前記マーカが少なくとも3つ撮影されるように、前記複数のカメラを設置する
ように構成される。
【発明の効果】
【0009】
本発明によれば、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本実施形態に係る推定方法の処理の制御の流れを示すフローチャートである。
【発明を実施するための形態】
【0011】
以下に本発明の実施形態を説明する。なお、以下にあげる実施形態は、説明のためのものであり、本発明の範囲を制限するものではない。したがって、当業者であれば、これらの各要素または全要素を、これと均等なものに置換した実施形態を採用することが可能であるが、これらの実施形態も、本発明の範囲に含まれる。
【実施例1】
【0012】
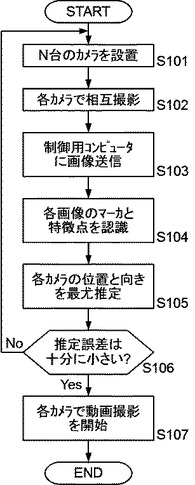
図1は、本実施形態に係る推定方法の処理の制御の流れを示すフローチャートである。以下、本図を参照して説明する。
【0013】
まず、ユーザは、街中を移動する人や車両の様子を動画撮影する場合に、一つの交差点に向けて複数のカメラを設置する(ステップS101)。この交差点が、撮影対象地域となる。
【0014】
各カメラには、そのレンズ側(正面側)から見えるように、拡張現実技術で利用されるマーカが固定されている。マーカは、交差点を挟んで配置された他のカメラから、その模様が認識できる程度の大きさであることが望ましい。また、マーカの模様は、カメラ同士で互いに異なるものとする。
【0015】
複数のカメラの設置の際には、他のカメラができるだけその視界に含まれるようにそれぞれの位置や向きを設定する。
【0016】
ついで、ユーザは、各カメラで撮影を行い(ステップS102)、撮影結果の画像を制御用コンピュータに送る(ステップS103)。
【0017】
撮影機能ならびに無線通信機能を有するスマートフォンをカメラとして利用した場合には、あらかじめ用意された制御用コンピュータに、撮影結果の画像をアップロードすれば良い。また、各カメラには、そのカメラを制御するための小型コンピュータを接続するものとし、小型コンピュータ同士を公衆無線LANや携帯電話通信網などを介して通信可能に接続することとしても良い。
【0018】
すると、制御用コンピュータは、各画像に撮影されているマーカならびに特徴点を認識して(ステップS104)、各マーカや特徴点の各画像における位置から、各カメラならびに特徴点の位置、および、各カメラの向きを推定する(ステップS105)。
【0019】
ここで、各カメラの位置および向きはそれぞれ自由度が3であるから、カメラがN台ある場合、カメラの位置および向きの未知パラメータの個数は、6Nということになる。
【0020】
一方、撮影された画像は、N枚であるが、各画像に、(平均して)他のM台(ただしM≦N−1)のカメラに固定されたマーカが画像内に撮影されているものとする。マーカの画像内における位置は2次元の量であるから、1枚の画像について、画像変換の方程式が2M個得られることになる。画像は全部でN枚であるから、方程式は、2MN個ある。
【0021】
すなわち、6N=2MNが成立すれば、すべてのカメラの位置および向きが決定できることになる。これを解くと、M=3となる。M≦N−1であるから、N≧4であることが必要となる。
【0022】
すなわち、カメラは少なくとも4台用意し、各画像に他のカメラのマーカが少なくとも3つ撮影されるように設定すれば、すべてのカメラの位置および向きを定めることができる、といえる。
【0023】
実際には、街中の特徴点、たとえば、交差点における横断歩道の形状や郵便ポスト、店舗の看板などの存在によって、1枚の画像に撮影されるマーカの数が3未満であるような場合や、用意したカメラの数が4未満であっても、カメラの位置や向きを推定することができる。
【0024】
この推定の際には、透視投影の方程式を解く、あるいは、透視投影の方程式の誤差が最も小さくなるような最尤推定の技術を利用する。
【0025】
そして、各カメラの位置ならびに向きが十分に小さい誤差で推定できたら(ステップS106;Yes)、各カメラで動画撮影を開始して(ステップS107)、本処理を終了する。
【0026】
一方、各カメラの位置ならびに向きの推定誤差が所定の閾値よりも大きい場合(ステップS106;No)、ステップS101に戻って、カメラの位置や向きを再度設定し直す。
【0027】
なお、各カメラにおける静止画の撮影(ステップS102)や動画撮影の開始(ステップS107)は、カメラ等が有する通信機能を利用して制御用コンピュータから集中管理・集中制御できるように構成することが望ましいが、たとえば複数の人間が手作業でこれらの処理を実行することも可能である。
【産業上の利用可能性】
【0028】
本発明によれば、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法を提供することができる。
【技術分野】
【0001】
本発明は、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法に関する。
【背景技術】
【0002】
従来から、街中を移動する車両等の様子を撮影して、交通量等を計測する技術が提案されている(たとえば、特許文献1参照)。
【0003】
一方で、所定の文字や図形、模様が印刷されたマーカを現実世界の種々の物品に貼付してから当該物品およびその周辺を撮影した画像において、当該マーカが撮影された位置に当該マーカに対応付けられる仮想的なキャラクターや各種の情報を合成するAR(Augmented Reality)技術提案されている(たとえば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−302228号公報
【特許文献2】特開2006−048484号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
たとえば交差点のように、行き交う人や車両が多い状況で交通量を正確に計測するには、複数のカメラで撮影を行って、人や車両の同定を行う必要がある。
【0006】
このような状況で、各カメラを設置した位置や向きを簡単に推定できる方法が強く求められている。
【0007】
本発明は、以上のような課題を解決するもので、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る推定方法は、
マーカが固定されたカメラを複数、撮影対象地域内に設置する設置工程、
前記設置された複数のカメラのそれぞれにより、前記撮影対象地域を撮影する撮影工程、
前記複数のマーカが、前記複数のカメラのそれぞれによる撮影により得られた複数の画像内において撮影されている位置と、前記撮影対象地域内の特徴点の位置と、から、前記複数のカメラの前記撮影対象地域に対する位置ならびに向きを推定する推定工程
を備え、
前記複数の画像内において、前記マーカが少なくとも3つ撮影されるように、前記複数のカメラを設置する
ように構成される。
【発明の効果】
【0009】
本発明によれば、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本実施形態に係る推定方法の処理の制御の流れを示すフローチャートである。
【発明を実施するための形態】
【0011】
以下に本発明の実施形態を説明する。なお、以下にあげる実施形態は、説明のためのものであり、本発明の範囲を制限するものではない。したがって、当業者であれば、これらの各要素または全要素を、これと均等なものに置換した実施形態を採用することが可能であるが、これらの実施形態も、本発明の範囲に含まれる。
【実施例1】
【0012】
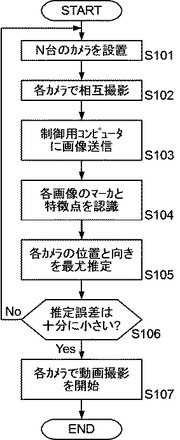
図1は、本実施形態に係る推定方法の処理の制御の流れを示すフローチャートである。以下、本図を参照して説明する。
【0013】
まず、ユーザは、街中を移動する人や車両の様子を動画撮影する場合に、一つの交差点に向けて複数のカメラを設置する(ステップS101)。この交差点が、撮影対象地域となる。
【0014】
各カメラには、そのレンズ側(正面側)から見えるように、拡張現実技術で利用されるマーカが固定されている。マーカは、交差点を挟んで配置された他のカメラから、その模様が認識できる程度の大きさであることが望ましい。また、マーカの模様は、カメラ同士で互いに異なるものとする。
【0015】
複数のカメラの設置の際には、他のカメラができるだけその視界に含まれるようにそれぞれの位置や向きを設定する。
【0016】
ついで、ユーザは、各カメラで撮影を行い(ステップS102)、撮影結果の画像を制御用コンピュータに送る(ステップS103)。
【0017】
撮影機能ならびに無線通信機能を有するスマートフォンをカメラとして利用した場合には、あらかじめ用意された制御用コンピュータに、撮影結果の画像をアップロードすれば良い。また、各カメラには、そのカメラを制御するための小型コンピュータを接続するものとし、小型コンピュータ同士を公衆無線LANや携帯電話通信網などを介して通信可能に接続することとしても良い。
【0018】
すると、制御用コンピュータは、各画像に撮影されているマーカならびに特徴点を認識して(ステップS104)、各マーカや特徴点の各画像における位置から、各カメラならびに特徴点の位置、および、各カメラの向きを推定する(ステップS105)。
【0019】
ここで、各カメラの位置および向きはそれぞれ自由度が3であるから、カメラがN台ある場合、カメラの位置および向きの未知パラメータの個数は、6Nということになる。
【0020】
一方、撮影された画像は、N枚であるが、各画像に、(平均して)他のM台(ただしM≦N−1)のカメラに固定されたマーカが画像内に撮影されているものとする。マーカの画像内における位置は2次元の量であるから、1枚の画像について、画像変換の方程式が2M個得られることになる。画像は全部でN枚であるから、方程式は、2MN個ある。
【0021】
すなわち、6N=2MNが成立すれば、すべてのカメラの位置および向きが決定できることになる。これを解くと、M=3となる。M≦N−1であるから、N≧4であることが必要となる。
【0022】
すなわち、カメラは少なくとも4台用意し、各画像に他のカメラのマーカが少なくとも3つ撮影されるように設定すれば、すべてのカメラの位置および向きを定めることができる、といえる。
【0023】
実際には、街中の特徴点、たとえば、交差点における横断歩道の形状や郵便ポスト、店舗の看板などの存在によって、1枚の画像に撮影されるマーカの数が3未満であるような場合や、用意したカメラの数が4未満であっても、カメラの位置や向きを推定することができる。
【0024】
この推定の際には、透視投影の方程式を解く、あるいは、透視投影の方程式の誤差が最も小さくなるような最尤推定の技術を利用する。
【0025】
そして、各カメラの位置ならびに向きが十分に小さい誤差で推定できたら(ステップS106;Yes)、各カメラで動画撮影を開始して(ステップS107)、本処理を終了する。
【0026】
一方、各カメラの位置ならびに向きの推定誤差が所定の閾値よりも大きい場合(ステップS106;No)、ステップS101に戻って、カメラの位置や向きを再度設定し直す。
【0027】
なお、各カメラにおける静止画の撮影(ステップS102)や動画撮影の開始(ステップS107)は、カメラ等が有する通信機能を利用して制御用コンピュータから集中管理・集中制御できるように構成することが望ましいが、たとえば複数の人間が手作業でこれらの処理を実行することも可能である。
【産業上の利用可能性】
【0028】
本発明によれば、街中を移動する人や車両の様子を複数のカメラから撮影する際に、カメラが設置された位置や向きを推定する推定方法を提供することができる。
【特許請求の範囲】
【請求項1】
マーカが固定されたカメラを複数、撮影対象地域内に設置する設置工程、
前記設置された複数のカメラのそれぞれにより、前記撮影対象地域を撮影する撮影工程、
前記複数のマーカが、前記複数のカメラのそれぞれによる撮影により得られた複数の画像内において撮影されている位置と、前記撮影対象地域内の特徴点の位置と、から、前記複数のカメラの前記撮影対象地域に対する位置ならびに向きを推定する推定工程
を備え、
前記複数の画像内において、前記マーカが少なくとも3つ撮影されるように、前記複数のカメラを設置する
ことを特徴とする推定方法。
【請求項1】
マーカが固定されたカメラを複数、撮影対象地域内に設置する設置工程、
前記設置された複数のカメラのそれぞれにより、前記撮影対象地域を撮影する撮影工程、
前記複数のマーカが、前記複数のカメラのそれぞれによる撮影により得られた複数の画像内において撮影されている位置と、前記撮影対象地域内の特徴点の位置と、から、前記複数のカメラの前記撮影対象地域に対する位置ならびに向きを推定する推定工程
を備え、
前記複数の画像内において、前記マーカが少なくとも3つ撮影されるように、前記複数のカメラを設置する
ことを特徴とする推定方法。
【図1】


【公開番号】特開2012−104052(P2012−104052A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−254134(P2010−254134)
【出願日】平成22年11月12日(2010.11.12)
【出願人】(591146239)いであ株式会社 (11)
【出願人】(509171438)シミュレーション・リサーチ・ラボ株式会社 (2)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月12日(2010.11.12)
【出願人】(591146239)いであ株式会社 (11)
【出願人】(509171438)シミュレーション・リサーチ・ラボ株式会社 (2)
【Fターム(参考)】
[ Back to top ]