
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置

【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、推測航法による追跡を使用して車両の位置及び方位を記録する方法に関する。この方法は、車及び他の車両で使用され、特にトンネル及び駐車場などにおいてGNSS信号が一時的に非常に弱いとき又は利用可能でないときに、GNSSによる車両位置の決定を補完することが多い。また、本発明は、その方法を実行する追跡装置に関する。
【背景技術】
【0002】
センサ測定結果から導き出される後輪の速度を使用する推測航法による車両の位置及び方位の追跡方法は、周知である。また、前輪の速度のみを使用する方法が提案されているが、かじ取り角(wheel angle)が変化するために前輪の速度の評価はより複雑である。現在のところ、左右前輪の速度に車両の速度及び方位変化に関する近似解のみが採用されている(非特許文献1参照)。この文献によると、かじ取り角は、反復方法によって決定される。使用する近似は、大きなかじ取り角を除外できない場合に、追跡の精度が落ちる可能性がある。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Ch. Hollenstein, E. Favey, C. Schmid, A. Somieski, D. Ammann: ‘Performance of a Low-cost Real-time Navigation System using Single-frequency GNSS Measurements Combined with Wheel-tick Data’, Proceedings of ION GNSS 2008 Meeting, Savannah, September 2008
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。この目的は、請求項1の特徴部の特徴により達成される。
【課題を解決するための手段】
【0005】
本発明に係る方法の利点は、地下の駐車場及び同様な環境などで同時にGNSS信号が弱くなり又は欠如するときなどで、かじ取り角が大きいときに特に示される。本方法は、必要な処理動力及び費用に関して非常に効率的な方法で実施可能である。
【0006】
センサ測定結果は、GNSSの測定結果と組み合わせて使用できる。ここで、双方を、密結合のカルマンフィルタ(a tightly coupled Kalman filter)に供給することなどによって、利用可能になる。
【0007】
本発明の他の目的は、本発明に係る方法を実行するのに適する追跡装置を提供することである。
【0008】
以下、本発明は、図面を参照してより詳細に説明されるが、これらは典型的な実施形態を説明するのみである。
【図面の簡単な説明】
【0009】
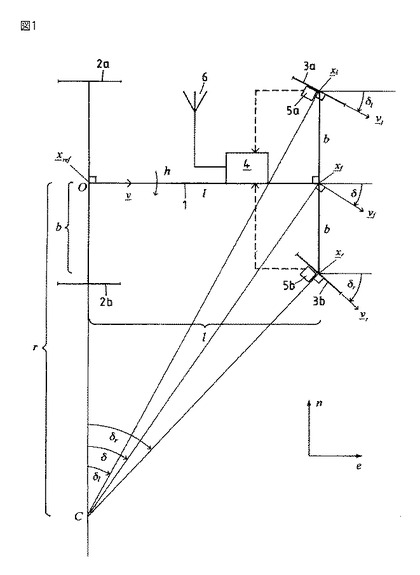
【図1】本発明に従う追跡装置を有する車両、及び本発明に従う方法を使用して追跡される車両の位置及び方位を示す図である。
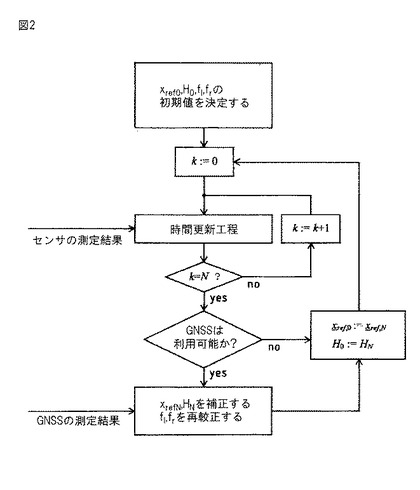
【図2】本発明に従う方法のフローを概略的に示す図である。
【図3】図2のフローの一部をより詳細に示す図である。
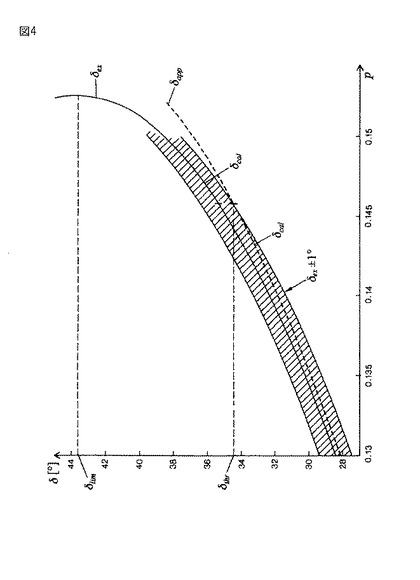
【図4】図1に示す中間のかじ取り角δの近似解及び正確な解を示す図である。
【発明を実施するための形態】
【0010】
車両において、いわゆる「推測航法(dead reckoning)」は、車輪の速度を決定し、その結果を車両の位置の基礎として、GNSSと組み合わせるか、又はGNSSが利用できないときには単体で使用して、車両の位置を追跡するために使用されることが多い。推測航法及びGNSSの追跡演算は、通常は車両の構成素子であるか又は車両に取り付けられる適当な追跡装置で実行され、その結果が表示され、又は他の手段で使用される。
【0011】
通常、車輪速度(wheel velocity)は、センサ測定結果から決定される。これは、一般に「ホイールティック(wheel tick)」と称され、固定の角度増分(fixed angular increments)により分割された特定の回転位置で作り出される。後輪からのセンサ測定結果が使用される場合、かじ取り角が一定かつゼロに等しいと仮定されるので、導出される車両の速度及び角速度は通常複雑ではない。
【0012】
しかしながら、後輪からのセンサ測定結果が利用できず、速度及び角速度を前輪のセンサ測定結果のみから抽出しなければならない場合がある。これは、より複雑な演算を考慮する必要があり、利用できる場合はホイールティックから抽出しなければならず、さもなければ直接的な測定結果などから抽出しなければならない。
【0013】
以下、かじ取り角を前輪のセンサ測定結果のみから導き出さなければならない場合が詳細に説明される。車両(図1)は、後輪2a及び2b並びに前輪3a及び3bを搭載する剛体フレーム(rigid frame)1を具備すると仮定される。車両は、前輪3a及び3bの中心を貫通する垂直軸のまわりを前輪3a及び3bが回転可能であり、かじ取り角が、車両の直線的動作に相当する0度を含む間隔(interval)をカバーすると仮定できるので、かじ取りが可能になる。追跡設備は、フレーム1に固定される追跡装置4と、前輪3a及び3bの回転を監視するホイールティックユニット5a及び5b又は前輪3a及び3bの車輪速度を導き出すことができるセンサ測定結果を作り出す他のセンサーとを具備する。また、フレーム1に搭載されるGNSSアンテナ6は、ホイールティックユニット5a及び5bと同様に追跡装置4にデータを供給する。追跡装置4は、車両の位置及び方位並びにGNSSアンテナで受信するGNSS信号を抽出するために、センサ測定結果、すなわちホイールティックユニット5a及び5bからの信号を処理するように構成される。また、追跡装置4は、データを記憶及び処理する構成素子とともに、目的のために必要な結果などを出力する構成素子を含む。フレーム1並びに後輪2a及び2b並びに前輪3a及び3bのサスペンションは、後輪2a及び2bと、前輪3a及び3bとの間の中点を通る対象軸に対して対称であると仮定される。
【0014】
以下の導出において、すべりはないものと仮定される。また、いずれの場合においてもホイールの中心の瞬時動作は、かじ取り角で暗示される方向に進むと仮定される。さらに、簡単にするために、北方向(n)及び東方向(e)で規定される水平面を移動すると仮定される。したがって、面内の全てのベクトルxは、北成分及び東成分からなる。すなわち、x=(x(n),x(e))となる。車両が移動する面が傾斜する場合、動きを水平面上に投射するように容易化される。
【0015】
一例では、車両の状態は、車両のフレーム1に固定される基準点xref=(xref(n),xref(e))の位置と、方位H、すなわち北方向及びフレームの長手方向の間の角度とによって説明できる。ここで角度は、時計回り方向で測定される。
【0016】
車両位置の推測航法において、長さΔtの(k+1)番目の時間更新間隔の終了時に車両が仮定する新しい状態は、運動方程式を使用して先の時間更新間隔の終了時における状態から導き出すことができる。
【数1】

【数2】
【数3】
ここでvは、瞬時のスカラー速度であり、hは、瞬時の方位変化、すなわち車両の角速度である。しがたって、時間更新工程ごとに、スカラー速度v及び方位変化hは、左右の前輪の速度vl及びvrから決定しなければならない。これらは、ホイールの半径に依存するホイールティック較正係数fl及びfrによって以下の式に従って時間間隔Δtの間に記憶されるホイールティックの数から導き出される生の速度Tl及びTrに対応する。
【数4】
【数5】
【0017】
以下において簡単のために、車両は、このとき東方向に向いている、すなわち方位Hは90°に等しいと仮定され、後輪の中心間の中点として規定される車両の基準点xrefは、原点Oであると仮定される(図1)。これによって、以下の導出は、上述の固定座標システム上で簡単な方法で実行可能である。結果は、車両の平面上の位置及び方向に依存しないので、これにより、一般性の喪失は暗示されない。
【0018】
これらの仮定に従うと、
【数6】
であり、前輪の中心間の中点は、
【数7】
である。ここでlは、車両のホイールベースである。前輪の中心は、
【数8】
【数9】
である。ここでbは、フロントトラックゲージ(front track gauge)の半分に等しい。
【0019】
車両、すなわち車両の基準点xrefは、このとき東方向に速度vで移動する。
【数10】
【0020】
関連する他の点vf、vl及びvrは、
【数11】
【数12】
【数13】
で示される。ここで、vf、vl及びvrそれぞれは、スカラベクトルすなわち、それぞれのベクトルの大きさを示す。δl及びδrは、左右それぞれの前輪のかじ取り角であり、中間のかじ取り角δは、東方向及びvfの動作の瞬時の方向の間の角度である。
【0021】
【数14】
【数15】
を規定する。ここでrは、xrefと(−r、0)における車両の回転の瞬時の中心Cとの間の距離であり、
【数16】
である。
【数17】
を得る。そして最終的に、
【数18】
となる。
【0022】
同様に
【数19】
から、
【数20】
を得る。
【0023】
車両の剛性から
【数21】
となり、式(5)〜(9)を考慮すると、
【数22】
及び
【数23】
となり、最終的には式(9)から
【数24】
となる。
【0024】
xl及びxrのために同様な方法を使用すると、
【数25】
【数26】
と、
【数27】
【数28】
とを得る。
【数29】
であるので、(13a)及び(13b)により、
【数30】
【数31】
と、
【数32】
【数33】
となる。
【0025】
スカラ方位変化は、
【数34】
である。ここで、下付き文字⊥は、車両の長手軸に垂直であるベクトル成分を示す。これから
【数35】
が導き出される。ここで、時計回り方向の方位変化は、正の符号を有する。
【0026】
V+及びV-は、
【数36】
及び
【数37】
として規定する。式(20a)及び(20b)から、
【数38】
及び
【数39】
すなわち
【数40】
及び
【数41】
となり、最終的に、
【数42】
となる。
【0027】
このv2の2次方程式は、平方根の前にプラス符号及びマイナス符号を有する2つの分岐を有する解
【数43】
を有する。
【0028】
【数44】
によって、式(29)は、
【数45】
となるので、vについて
【数46】
を得る。ここで正数のvは、車両の前方への移動を示し、負数のvは、車両の後方への移動を示す。式(27)及び(31)は、式(30)とともに、かじ取り角δの正接及びかじ取り角自体について式(20a)及び(20b)の正確な解を導き出す。
【数47】
【数48】
式(33)は、反転でき、Pは、y=tanδexの関数で表すことができる。
【数49】
【0029】
この非対称関数は、
【数50】
【数51】
において極値を有する。ここで、
【数52】
【数53】
である。
【0030】
これらは、式(31)の平方根の独立変数はゼロであり、δexは、
【数54】
【数55】
の値であると仮定する場合のPの値である。
【0031】
0‐車両の直線的な動き‐を含むδexの範囲に対応する解(31)の分岐は、式(31)及びこれから得られる式(33)及び(34)の平方根にプラス符号が付され、0≦|δex|≦δlimに適用される第1の分岐である。ここでδlim=δex(Pmax)である。一方、平方根にマイナス符号が付される第2の分岐は、δlim≦|δex|≦90をカバーする。これは、|δex|がδlimよりも大きい値である場合、解は、δlim及び−δlimを囲むδexの部分的範囲のいずれでも一義的でないことを暗示する。2つの解があり、瞬時の車輪速度のみに基づいて正しい解を選別することが不可能なためである。しかしながら、δex=δlimでは、式(13b)によって、
【数56】
であり、右前輪のかじ取り角δrが機械的な制約などによってδr≦δwlimに限定され、‐そして対称性により‐左前輪のかじ取り角δlが、δl≧−δwlimに限定される限り、式(31)、(33)及び(34)の第1の分岐が適用できて、解は、一義的である。δwlimは、常に45°よりも大きく、多くの車両でかじ取り角が45°よりも小さい値に限定されるので、以下において、0≦|δex|≦δlimが保持されると仮定されている。
【0032】
この仮定によって、式(31)〜(34)は、
【数57】
【数58】
【数59】
【数60】
と記載し直すことができる。
【0033】
次いで、方位変化hは、式(22)、(41)及び(42)から
【数61】
として導き出すことができる。
【0034】
このように導き出したv、δ及びhの正確な解は、かなり複雑である。具体的には、スカラ車輪速度vl及びhrに依存するv及びhが、カルマンフィルタ又は最小二乗法若しくは同様な方程式において使用される場合に必要な導関数において、より扱いにくい式をもたらす。したがって、処理動力及び処理時間が制限される場合、リアルタイムの状況でこれらを実行することは、実用的ではないことが多い。しかしながら、少なくともかじ取り角が大きくなりすぎない限り、通常は十分に良好であり、かつより扱いやすい近似値がある。かじ取り角が大きい場合、この近似値は、適当に補正できる。
【0035】
幾何学的考察からそれ自体周知である比較的簡単な近似解は、式(20a)及び(20b)から開始して展開できる。式(20a)は、
【数62】
として書き直すことができる。
【0036】
次いで、平方根は、
【数63】
について展開、すなわち線形化できる。これによって、
【数64】
を得る。
【0037】
次数がより高い項を無視すると、
【数65】
【数66】
に達する。ここで、添え字appは、「近似(approximate)」を意味し、vrは、上述のvlの導出と全体的に類似する方法で導き出されている。
【0038】
式(47a)及び(47b)から
【数67】
及び
【数68】
となる。
【0039】
【数69】
を規定する。
【0040】
【数70】
すなわち
【数71】
が分かる。
【0041】
ここで、δappによって、式(48)から近似解を抽出できる。
【数72】
そして、式(49)から式(22)によって、
【数73】
となる。
【0042】
式(22)を使用して式(47a)及び(47b)は、
【数74】
【数75】
のように書き直すことができる。このため、式(53)及び(54)は、容易に導き出すことができる。
【0043】
この近似解は、かじ取り角が大きすぎない限り、すなわち、δapp<δthrである限り、通常は十分に良好である。ここで、δthrは、車両の配置及び要求される精度に依存するかじ取り角のしきい値であり、通常は30°と40°との間であろう。δappがδthrよりも大きい場合、具体的には、δappが45°に接近する場合、近似解は、著しく逸脱する傾向があり、不十分な結果を得ることが多い。しかしながら、近似は、δappをδexに置換することによって、式(53)及び(54)におけるδappの大きな値を最も実用的な目的に適当な範囲に改良できることが理解される。これによって、式(41)及び(44)に従う正確な結果と、式(53)及び(54)に従う近似的な結果との中間の結果を得る。しかしながら、これは、大きなかじ取り角であっても正確な結果に非常に近づく。
【数76】
【数77】
【0044】
速度v及び方位変化hの近似的な結果及び中間の結果は、演算かじ取り角δcalの選択のみにより異なり、近似的な結果の場合がδappに等しく、中間の結果の場合がδexに等しい。
【0045】
δexは以下のようにδappから直接演算できる。
【数78】
によって、
【数79】
すなわち
【数80】
を得る。これは、式(42)とともに
【数81】
及び
【数82】
をもたらす。
【0046】
式(51)及び(61)を考え合わせると、δappの関数としてδexを得る。
【0047】
同様に、逆、すなわちδexの関数としてのδappの演算が可能である。式(20a)及び(20b)から、
【数83】
となる。これを式(52)とともに使用して、δappからδexを演算できる。いくつかの場合、車両の形状に依存する固定パラメータaのみが演算に入力される。
【0048】
図2を考慮すると、本発明に従う方法は、最も理解できる。図2は概要を提供する。車両の位置を追跡するために、それぞれがサイクル間隔をカバーする連続するフィルタサイクルが追跡装置4で実行される。好適には使用される密結合のカルマンフィルタの完全なフィルタサイクルは、予測工程と、補正工程とを含む。補正工程は、GNSSの測定結果が利用可能な場合にGNSSの測定結果をも考慮に入れる。カルマンフィルタを使用することによって、測定結果に通常作用するランダムな影響に的確に対処できる。
【0049】
予測工程は、それぞれが測定間隔ΔtをカバーするN個の時間更新工程からなる。例えば、Δtが0.1sであり、Nが10であると、更新工程は、1sなどの期間を有するサイクル間隔NΔtをカバーする。予測工程の開始において、車両の状態ベクトルは、先のサイクル間隔の終了又は処理の開始においていくつかの初期値に決定され、位置及び方位の開始値xref0及びH0並びにホイールティック較正係数fl及びfrを提供する。
【0050】
時間更新工程の間、追跡装置4において以下の動作が実行される(図3)。
【0051】
左前輪3aの生の速度Tl及び左前輪3bの生の速度Trは、N個の時間更新間隔のそれぞれでホイールティックユニット5a及び5bに記録されるホイールティック数から導き出される。ホイールティック数は、ローパスフィルタでフィルタリングされて、ランダムな変動が平滑化される。
【0052】
車輪速度vl及びvrは、第1の測定結果間隔に割り当てられる生の車輪速度Tl及びTrと、式(4a)及び(4b)を使用してサイクル間隔を通じて一定であると仮定されるホイールティック較正係数fl及びfrから演算される。位置xref1及び方位H1の新たな値は、かじ取り角vl及びvrから第1に決定されており、かつ速度v及び方位変化hを演算するために使用される演算かじ取り角δcalとともにk=0で式(1)〜(3)を使用して決定される。
【0053】
次いで、kは、k+1に置換され、それぞれの場合において、新しい状態の演算後に処理が終了するk=Nまで、開始点として使用される先の測定間隔から終了点により繰り返される(図2)。このように、サイクル間隔の間に車両がカバーする軌跡は、それぞれが時間更新工程に相当する一連のN個の線形部に近似される。演算かじ取り角δcalは、いずれの時間更新工程においても一定であると仮定されるが、共分散行列は、演算に使用される角度の値に実際に影響を与えるランダム係数として考慮する処理ノイズを付加するように修正される。
【0054】
状態情報及び精度情報を有するN個などの更新工程の予測工程の結果は、GNSSの測定結果が利用可能である場合、GNSSの測定結果をも処理する密結合のカルマンフィルタの補正工程で使用される。フィルタサイクルを終了させて、次のフィルタサイクルで予測工程の第1の時間更新工程で開始点xref0及び方位H0として使用可能な補正位置xrefN及びHN並びに再較正されたホイールティック較正係数fl及びfrを含む新しい状態ベクトルが決定される。位置及び方位は、表示又は他の目的のために追跡装置4から出力され、ナビゲーション装置などで処理されて使用される。
【0055】
上述の式(1)〜(3)を使用するためには、全ての時間更新間隔において、v及びhの値が先に演算される必要がある。これは、かじ取り角δを限定し、かつほぼ0°で通常は対称である、すなわち〔−δmax,+δmax〕が等しいかじ取り角間隔で、v及びhが、
【数84】
【数85】
のように演算できるように、演算かじ取り角δcalを決定する必要がある。ここで、δmaxは、車両の機械特性に依存するいくつかの定数であり、おおよそ35°と42°の間にしてもよい。いくつかの場合、δmaxは、δlimよりも大きくないと仮定される。
【0056】
v及びhを演算するために、式(52)をそれぞれの場合に使用して、δappを第1に決定する。|δapp|≦δthrなどδappが大きすぎない場合、|δapp|≦δthrにおいて、δappがδexで囲まれる許容範囲内であり、δcalは、δappに等しくなるように設定される。ここで、δthrは固定されたしきい値である。許容範囲は、δexの代わりにδappを使用することにより導入される誤差が大幅ではないことを保証するために、内部のいずれかの角度がδexに十分に近接することを考慮して決定される。|δapp|>δthrにより規定される領域など、δappが許容範囲内ではないかじ取り角間隔の部分において、同一からの逸脱がδappよりも小さいδexへの近似を使用しなければならない。好適には、δexに実質的に等しいδcalの値を使用しなければならない。すなわち、δcalは、
【数86】
に従って決定できる。
【0057】
式(65)からのδcalの値を式(63)及び(64)において使用できる。δexについての許容範囲は、許容可能な逸脱のある量又はパーセンテージなどで規定できる。例えば、2°よりも大きくない逸脱、好適には1°よりも大きくない逸脱である。絶対的又は相対的な項における速度v又は方位変化若しくは双方の最大許容可能逸脱などの他の基準も可能である。
【0058】
図4は、許容可能な逸脱が±1°であるa=0.31の状態を示す。δappが、δex±1°の許容範囲内である場合、δcalは、δappに等しく設定される。δapp=δthrにおいて、δappが許容範囲の境界に達する場合、δcalはδexに切替えられる。
【0059】
|δapp|>δthrの場合にδexに近い近似値にδappを置換する最も一般的な方法は、ルックアップテーブルを使用することである。適当に間隔を空けたδexの値の列のそれぞれ1つについて、δappに対応する値を含み、δappの値は、下方でδthrによって境界され、かつδexがδmaxに等しいときδexに対応するδappの値によって上方で境界される間隔をカバーする。適当なテーブルは、公式(52)及び(62)を使用して所与の車両のために全て一度演算されて、恒久的に記憶される。|δapp|>δthrであるいずれの値のδappにおいても、δexの対応する値は、テーブルから読み出される近接する値の間の線形の補間などによって決定できる。この方法は、追跡装置4において多くの処理動力を要せず、かつメモリの必需量も少量である。
【0060】
しかしながら、δ自体と値が異なるδ´の関数を使用すること、すなわち同一の関数とは異なる関数を使用することも可能である。
【0061】
例えば、式(51)からtanδappの式を導き出すことが可能である。pは、
【数87】
で表される。tanδappの二次方程式の解
【数88】
がもたらされる。式(62)とともに、これはtanδexの関数としてtanδappを得る。ゼロの近傍では、pのこの関数が限定されず、線形近似によって、
【数89】
に置換できる。
【0062】
また逆も同様に、tanδexは、式(60)にpを挿入して式(66)からtanδappの関数として表すことができる。これらの関係を使用して、tanδappの関数としてのtanδexの値を含むルックアップテーブルを演算し、かつ恒久的に記憶することができる。
【0063】
次いで、tanδcalを演算で使用できる。ここで、
【数90】
又は同等に
【数91】
と規定される。
【0064】
次いで、cosδcalは、式(63)及び(64)に従ってvim及びhimを演算するために、tanδcalの関数として、
【数92】
として表すことができる。
【0065】
しかしながら、式(63)及び(64)を使用する場合、余弦を直接使用することがより都合が良い。cosδappは、式(51)から以下のように導き出すことができる。
【数93】
cos2δappの二次方程式を導くと、
【数94】
となり、余弦の解は、
【数95】
となる。ここで再び、cosδexは、cosδappの関数として表すことができる。例えば、正接によって、
【数96】
及び
【数97】
となり、また逆も同様である。これを使用して、cosδapp及びcosδexの対応する対を有するルックアップテーブルを用意できる。これから|δapp|>δthr又は同等に|cosδapp|<cosδthrのために,cosδcalが容易に決定できる。
【0066】
いくらか異なるvimは、
【数98】
又は同様に
【数99】
を使用してtanδexから演算できる。これは、式(41)及び(42)から容易に導き出すことができ、vのための方程式(20a)及び(20b)の正確な解を得る。具体的には、式(75)又は(76)は、tanδexがδapp>δthrなどむしろ大きい場合に採用でき、式(63)は、より小さなδappで使用される。しかし、tanδcalなどによる全ての範囲に亘って公式を使用することができる。
【0067】
一方、himは、vim‐式(63)に従う演算又は式(75)又は(76)に従う演算‐と、式(22)を使用するtanδexとから導き出すこともできる。すなわち、
【数100】
である。これは、式(75)及び(76)を使用してvimを演算する場合、
【数101】
又は同様に
【数102】
に対応する。これは式(44)に従って演算されるhに等しい。すなわち式(20a)から得る正確な解である。再びここで、δapp>δthr又は全ての範囲に亘ってtanδcalについて式(77)のみを使用できる。
【0068】
中間値vim及びhimを簡明な公式(63)及び(64)に従って演算するときに使用することは、演算かじ取り角δcalが〔−35°,+35°〕の間隔を超えて変化する場合ですら多くの場合、適切であることが理解される。
【0069】
十分な処理能力が利用可能である場合、ルックアップテーブルを使用する代わりにδappから直接的にδexを演算するために公式(52)及び(61)を使用することができ、tanδappから直接的にtanδexを演算するために公式(66)及び(60)を使用することができる。さらに、式(23)、(24)及び(30)とともに、速度v及び方位変化hを得る公式(41)及び(44)を使用することができる。これらは、式(20a)及び(20b)の正確な解であり、かじ取り角にδexを使用し、v及びhそれぞれに式(75)又は(76)及び(77)を使用する解に対応する。
【0070】
予測工程に次いでフィルタサイクルを終了させるカルマンフィルタ補正工程において、GNSSの観測方程式は除き、状態v、h、fl及びfrの関数として生の車輪速度Tl及びTrを表す観測方程式は、δcalがパラメータとして計算される場合に使用される。例えば、式(55a)及び(55b)に対応する方程式
【数103】
【数104】
は、式(4a)及び(4b)それぞれに従い表されるvl及びvrとともに採用され、δappはδcalに置換され、Tl及びTrは、観察結果として扱われ、fl、fr、v及びhは未知である。
【符号の説明】
【0071】
1 フレーム
2a、2b 後輪
3a、3b 前輪
4 追跡装置
5a、5b ホイールティックユニット
6 GNSSアンテナ
【技術分野】
【0001】
本発明は、推測航法による追跡を使用して車両の位置及び方位を記録する方法に関する。この方法は、車及び他の車両で使用され、特にトンネル及び駐車場などにおいてGNSS信号が一時的に非常に弱いとき又は利用可能でないときに、GNSSによる車両位置の決定を補完することが多い。また、本発明は、その方法を実行する追跡装置に関する。
【背景技術】
【0002】
センサ測定結果から導き出される後輪の速度を使用する推測航法による車両の位置及び方位の追跡方法は、周知である。また、前輪の速度のみを使用する方法が提案されているが、かじ取り角(wheel angle)が変化するために前輪の速度の評価はより複雑である。現在のところ、左右前輪の速度に車両の速度及び方位変化に関する近似解のみが採用されている(非特許文献1参照)。この文献によると、かじ取り角は、反復方法によって決定される。使用する近似は、大きなかじ取り角を除外できない場合に、追跡の精度が落ちる可能性がある。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Ch. Hollenstein, E. Favey, C. Schmid, A. Somieski, D. Ammann: ‘Performance of a Low-cost Real-time Navigation System using Single-frequency GNSS Measurements Combined with Wheel-tick Data’, Proceedings of ION GNSS 2008 Meeting, Savannah, September 2008
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。この目的は、請求項1の特徴部の特徴により達成される。
【課題を解決するための手段】
【0005】
本発明に係る方法の利点は、地下の駐車場及び同様な環境などで同時にGNSS信号が弱くなり又は欠如するときなどで、かじ取り角が大きいときに特に示される。本方法は、必要な処理動力及び費用に関して非常に効率的な方法で実施可能である。
【0006】
センサ測定結果は、GNSSの測定結果と組み合わせて使用できる。ここで、双方を、密結合のカルマンフィルタ(a tightly coupled Kalman filter)に供給することなどによって、利用可能になる。
【0007】
本発明の他の目的は、本発明に係る方法を実行するのに適する追跡装置を提供することである。
【0008】
以下、本発明は、図面を参照してより詳細に説明されるが、これらは典型的な実施形態を説明するのみである。
【図面の簡単な説明】
【0009】
【図1】本発明に従う追跡装置を有する車両、及び本発明に従う方法を使用して追跡される車両の位置及び方位を示す図である。
【図2】本発明に従う方法のフローを概略的に示す図である。
【図3】図2のフローの一部をより詳細に示す図である。
【図4】図1に示す中間のかじ取り角δの近似解及び正確な解を示す図である。
【発明を実施するための形態】
【0010】
車両において、いわゆる「推測航法(dead reckoning)」は、車輪の速度を決定し、その結果を車両の位置の基礎として、GNSSと組み合わせるか、又はGNSSが利用できないときには単体で使用して、車両の位置を追跡するために使用されることが多い。推測航法及びGNSSの追跡演算は、通常は車両の構成素子であるか又は車両に取り付けられる適当な追跡装置で実行され、その結果が表示され、又は他の手段で使用される。
【0011】
通常、車輪速度(wheel velocity)は、センサ測定結果から決定される。これは、一般に「ホイールティック(wheel tick)」と称され、固定の角度増分(fixed angular increments)により分割された特定の回転位置で作り出される。後輪からのセンサ測定結果が使用される場合、かじ取り角が一定かつゼロに等しいと仮定されるので、導出される車両の速度及び角速度は通常複雑ではない。
【0012】
しかしながら、後輪からのセンサ測定結果が利用できず、速度及び角速度を前輪のセンサ測定結果のみから抽出しなければならない場合がある。これは、より複雑な演算を考慮する必要があり、利用できる場合はホイールティックから抽出しなければならず、さもなければ直接的な測定結果などから抽出しなければならない。
【0013】
以下、かじ取り角を前輪のセンサ測定結果のみから導き出さなければならない場合が詳細に説明される。車両(図1)は、後輪2a及び2b並びに前輪3a及び3bを搭載する剛体フレーム(rigid frame)1を具備すると仮定される。車両は、前輪3a及び3bの中心を貫通する垂直軸のまわりを前輪3a及び3bが回転可能であり、かじ取り角が、車両の直線的動作に相当する0度を含む間隔(interval)をカバーすると仮定できるので、かじ取りが可能になる。追跡設備は、フレーム1に固定される追跡装置4と、前輪3a及び3bの回転を監視するホイールティックユニット5a及び5b又は前輪3a及び3bの車輪速度を導き出すことができるセンサ測定結果を作り出す他のセンサーとを具備する。また、フレーム1に搭載されるGNSSアンテナ6は、ホイールティックユニット5a及び5bと同様に追跡装置4にデータを供給する。追跡装置4は、車両の位置及び方位並びにGNSSアンテナで受信するGNSS信号を抽出するために、センサ測定結果、すなわちホイールティックユニット5a及び5bからの信号を処理するように構成される。また、追跡装置4は、データを記憶及び処理する構成素子とともに、目的のために必要な結果などを出力する構成素子を含む。フレーム1並びに後輪2a及び2b並びに前輪3a及び3bのサスペンションは、後輪2a及び2bと、前輪3a及び3bとの間の中点を通る対象軸に対して対称であると仮定される。
【0014】
以下の導出において、すべりはないものと仮定される。また、いずれの場合においてもホイールの中心の瞬時動作は、かじ取り角で暗示される方向に進むと仮定される。さらに、簡単にするために、北方向(n)及び東方向(e)で規定される水平面を移動すると仮定される。したがって、面内の全てのベクトルxは、北成分及び東成分からなる。すなわち、x=(x(n),x(e))となる。車両が移動する面が傾斜する場合、動きを水平面上に投射するように容易化される。
【0015】
一例では、車両の状態は、車両のフレーム1に固定される基準点xref=(xref(n),xref(e))の位置と、方位H、すなわち北方向及びフレームの長手方向の間の角度とによって説明できる。ここで角度は、時計回り方向で測定される。
【0016】
車両位置の推測航法において、長さΔtの(k+1)番目の時間更新間隔の終了時に車両が仮定する新しい状態は、運動方程式を使用して先の時間更新間隔の終了時における状態から導き出すことができる。
【数1】
【数2】
【数3】
ここでvは、瞬時のスカラー速度であり、hは、瞬時の方位変化、すなわち車両の角速度である。しがたって、時間更新工程ごとに、スカラー速度v及び方位変化hは、左右の前輪の速度vl及びvrから決定しなければならない。これらは、ホイールの半径に依存するホイールティック較正係数fl及びfrによって以下の式に従って時間間隔Δtの間に記憶されるホイールティックの数から導き出される生の速度Tl及びTrに対応する。
【数4】
【数5】
【0017】
以下において簡単のために、車両は、このとき東方向に向いている、すなわち方位Hは90°に等しいと仮定され、後輪の中心間の中点として規定される車両の基準点xrefは、原点Oであると仮定される(図1)。これによって、以下の導出は、上述の固定座標システム上で簡単な方法で実行可能である。結果は、車両の平面上の位置及び方向に依存しないので、これにより、一般性の喪失は暗示されない。
【0018】
これらの仮定に従うと、
【数6】
であり、前輪の中心間の中点は、
【数7】
である。ここでlは、車両のホイールベースである。前輪の中心は、
【数8】
【数9】
である。ここでbは、フロントトラックゲージ(front track gauge)の半分に等しい。
【0019】
車両、すなわち車両の基準点xrefは、このとき東方向に速度vで移動する。
【数10】
【0020】
関連する他の点vf、vl及びvrは、
【数11】
【数12】
【数13】
で示される。ここで、vf、vl及びvrそれぞれは、スカラベクトルすなわち、それぞれのベクトルの大きさを示す。δl及びδrは、左右それぞれの前輪のかじ取り角であり、中間のかじ取り角δは、東方向及びvfの動作の瞬時の方向の間の角度である。
【0021】
【数14】
【数15】
を規定する。ここでrは、xrefと(−r、0)における車両の回転の瞬時の中心Cとの間の距離であり、
【数16】
である。
【数17】
を得る。そして最終的に、
【数18】
となる。
【0022】
同様に
【数19】
から、
【数20】
を得る。
【0023】
車両の剛性から
【数21】
となり、式(5)〜(9)を考慮すると、
【数22】
及び
【数23】
となり、最終的には式(9)から
【数24】
となる。
【0024】
xl及びxrのために同様な方法を使用すると、
【数25】
【数26】
と、
【数27】
【数28】
とを得る。
【数29】
であるので、(13a)及び(13b)により、
【数30】
【数31】
と、
【数32】
【数33】
となる。
【0025】
スカラ方位変化は、
【数34】
である。ここで、下付き文字⊥は、車両の長手軸に垂直であるベクトル成分を示す。これから
【数35】
が導き出される。ここで、時計回り方向の方位変化は、正の符号を有する。
【0026】
V+及びV-は、
【数36】
及び
【数37】
として規定する。式(20a)及び(20b)から、
【数38】
及び
【数39】
すなわち
【数40】
及び
【数41】
となり、最終的に、
【数42】
となる。
【0027】
このv2の2次方程式は、平方根の前にプラス符号及びマイナス符号を有する2つの分岐を有する解
【数43】
を有する。
【0028】
【数44】
によって、式(29)は、
【数45】
となるので、vについて
【数46】
を得る。ここで正数のvは、車両の前方への移動を示し、負数のvは、車両の後方への移動を示す。式(27)及び(31)は、式(30)とともに、かじ取り角δの正接及びかじ取り角自体について式(20a)及び(20b)の正確な解を導き出す。
【数47】
【数48】
式(33)は、反転でき、Pは、y=tanδexの関数で表すことができる。
【数49】
【0029】
この非対称関数は、
【数50】
【数51】
において極値を有する。ここで、
【数52】
【数53】
である。
【0030】
これらは、式(31)の平方根の独立変数はゼロであり、δexは、
【数54】
【数55】
の値であると仮定する場合のPの値である。
【0031】
0‐車両の直線的な動き‐を含むδexの範囲に対応する解(31)の分岐は、式(31)及びこれから得られる式(33)及び(34)の平方根にプラス符号が付され、0≦|δex|≦δlimに適用される第1の分岐である。ここでδlim=δex(Pmax)である。一方、平方根にマイナス符号が付される第2の分岐は、δlim≦|δex|≦90をカバーする。これは、|δex|がδlimよりも大きい値である場合、解は、δlim及び−δlimを囲むδexの部分的範囲のいずれでも一義的でないことを暗示する。2つの解があり、瞬時の車輪速度のみに基づいて正しい解を選別することが不可能なためである。しかしながら、δex=δlimでは、式(13b)によって、
【数56】
であり、右前輪のかじ取り角δrが機械的な制約などによってδr≦δwlimに限定され、‐そして対称性により‐左前輪のかじ取り角δlが、δl≧−δwlimに限定される限り、式(31)、(33)及び(34)の第1の分岐が適用できて、解は、一義的である。δwlimは、常に45°よりも大きく、多くの車両でかじ取り角が45°よりも小さい値に限定されるので、以下において、0≦|δex|≦δlimが保持されると仮定されている。
【0032】
この仮定によって、式(31)〜(34)は、
【数57】
【数58】
【数59】
【数60】
と記載し直すことができる。
【0033】
次いで、方位変化hは、式(22)、(41)及び(42)から
【数61】
として導き出すことができる。
【0034】
このように導き出したv、δ及びhの正確な解は、かなり複雑である。具体的には、スカラ車輪速度vl及びhrに依存するv及びhが、カルマンフィルタ又は最小二乗法若しくは同様な方程式において使用される場合に必要な導関数において、より扱いにくい式をもたらす。したがって、処理動力及び処理時間が制限される場合、リアルタイムの状況でこれらを実行することは、実用的ではないことが多い。しかしながら、少なくともかじ取り角が大きくなりすぎない限り、通常は十分に良好であり、かつより扱いやすい近似値がある。かじ取り角が大きい場合、この近似値は、適当に補正できる。
【0035】
幾何学的考察からそれ自体周知である比較的簡単な近似解は、式(20a)及び(20b)から開始して展開できる。式(20a)は、
【数62】
として書き直すことができる。
【0036】
次いで、平方根は、
【数63】
について展開、すなわち線形化できる。これによって、
【数64】
を得る。
【0037】
次数がより高い項を無視すると、
【数65】
【数66】
に達する。ここで、添え字appは、「近似(approximate)」を意味し、vrは、上述のvlの導出と全体的に類似する方法で導き出されている。
【0038】
式(47a)及び(47b)から
【数67】
及び
【数68】
となる。
【0039】
【数69】
を規定する。
【0040】
【数70】
すなわち
【数71】
が分かる。
【0041】
ここで、δappによって、式(48)から近似解を抽出できる。
【数72】
そして、式(49)から式(22)によって、
【数73】
となる。
【0042】
式(22)を使用して式(47a)及び(47b)は、
【数74】
【数75】
のように書き直すことができる。このため、式(53)及び(54)は、容易に導き出すことができる。
【0043】
この近似解は、かじ取り角が大きすぎない限り、すなわち、δapp<δthrである限り、通常は十分に良好である。ここで、δthrは、車両の配置及び要求される精度に依存するかじ取り角のしきい値であり、通常は30°と40°との間であろう。δappがδthrよりも大きい場合、具体的には、δappが45°に接近する場合、近似解は、著しく逸脱する傾向があり、不十分な結果を得ることが多い。しかしながら、近似は、δappをδexに置換することによって、式(53)及び(54)におけるδappの大きな値を最も実用的な目的に適当な範囲に改良できることが理解される。これによって、式(41)及び(44)に従う正確な結果と、式(53)及び(54)に従う近似的な結果との中間の結果を得る。しかしながら、これは、大きなかじ取り角であっても正確な結果に非常に近づく。
【数76】
【数77】
【0044】
速度v及び方位変化hの近似的な結果及び中間の結果は、演算かじ取り角δcalの選択のみにより異なり、近似的な結果の場合がδappに等しく、中間の結果の場合がδexに等しい。
【0045】
δexは以下のようにδappから直接演算できる。
【数78】
によって、
【数79】
すなわち
【数80】
を得る。これは、式(42)とともに
【数81】
及び
【数82】
をもたらす。
【0046】
式(51)及び(61)を考え合わせると、δappの関数としてδexを得る。
【0047】
同様に、逆、すなわちδexの関数としてのδappの演算が可能である。式(20a)及び(20b)から、
【数83】
となる。これを式(52)とともに使用して、δappからδexを演算できる。いくつかの場合、車両の形状に依存する固定パラメータaのみが演算に入力される。
【0048】
図2を考慮すると、本発明に従う方法は、最も理解できる。図2は概要を提供する。車両の位置を追跡するために、それぞれがサイクル間隔をカバーする連続するフィルタサイクルが追跡装置4で実行される。好適には使用される密結合のカルマンフィルタの完全なフィルタサイクルは、予測工程と、補正工程とを含む。補正工程は、GNSSの測定結果が利用可能な場合にGNSSの測定結果をも考慮に入れる。カルマンフィルタを使用することによって、測定結果に通常作用するランダムな影響に的確に対処できる。
【0049】
予測工程は、それぞれが測定間隔ΔtをカバーするN個の時間更新工程からなる。例えば、Δtが0.1sであり、Nが10であると、更新工程は、1sなどの期間を有するサイクル間隔NΔtをカバーする。予測工程の開始において、車両の状態ベクトルは、先のサイクル間隔の終了又は処理の開始においていくつかの初期値に決定され、位置及び方位の開始値xref0及びH0並びにホイールティック較正係数fl及びfrを提供する。
【0050】
時間更新工程の間、追跡装置4において以下の動作が実行される(図3)。
【0051】
左前輪3aの生の速度Tl及び左前輪3bの生の速度Trは、N個の時間更新間隔のそれぞれでホイールティックユニット5a及び5bに記録されるホイールティック数から導き出される。ホイールティック数は、ローパスフィルタでフィルタリングされて、ランダムな変動が平滑化される。
【0052】
車輪速度vl及びvrは、第1の測定結果間隔に割り当てられる生の車輪速度Tl及びTrと、式(4a)及び(4b)を使用してサイクル間隔を通じて一定であると仮定されるホイールティック較正係数fl及びfrから演算される。位置xref1及び方位H1の新たな値は、かじ取り角vl及びvrから第1に決定されており、かつ速度v及び方位変化hを演算するために使用される演算かじ取り角δcalとともにk=0で式(1)〜(3)を使用して決定される。
【0053】
次いで、kは、k+1に置換され、それぞれの場合において、新しい状態の演算後に処理が終了するk=Nまで、開始点として使用される先の測定間隔から終了点により繰り返される(図2)。このように、サイクル間隔の間に車両がカバーする軌跡は、それぞれが時間更新工程に相当する一連のN個の線形部に近似される。演算かじ取り角δcalは、いずれの時間更新工程においても一定であると仮定されるが、共分散行列は、演算に使用される角度の値に実際に影響を与えるランダム係数として考慮する処理ノイズを付加するように修正される。
【0054】
状態情報及び精度情報を有するN個などの更新工程の予測工程の結果は、GNSSの測定結果が利用可能である場合、GNSSの測定結果をも処理する密結合のカルマンフィルタの補正工程で使用される。フィルタサイクルを終了させて、次のフィルタサイクルで予測工程の第1の時間更新工程で開始点xref0及び方位H0として使用可能な補正位置xrefN及びHN並びに再較正されたホイールティック較正係数fl及びfrを含む新しい状態ベクトルが決定される。位置及び方位は、表示又は他の目的のために追跡装置4から出力され、ナビゲーション装置などで処理されて使用される。
【0055】
上述の式(1)〜(3)を使用するためには、全ての時間更新間隔において、v及びhの値が先に演算される必要がある。これは、かじ取り角δを限定し、かつほぼ0°で通常は対称である、すなわち〔−δmax,+δmax〕が等しいかじ取り角間隔で、v及びhが、
【数84】
【数85】
のように演算できるように、演算かじ取り角δcalを決定する必要がある。ここで、δmaxは、車両の機械特性に依存するいくつかの定数であり、おおよそ35°と42°の間にしてもよい。いくつかの場合、δmaxは、δlimよりも大きくないと仮定される。
【0056】
v及びhを演算するために、式(52)をそれぞれの場合に使用して、δappを第1に決定する。|δapp|≦δthrなどδappが大きすぎない場合、|δapp|≦δthrにおいて、δappがδexで囲まれる許容範囲内であり、δcalは、δappに等しくなるように設定される。ここで、δthrは固定されたしきい値である。許容範囲は、δexの代わりにδappを使用することにより導入される誤差が大幅ではないことを保証するために、内部のいずれかの角度がδexに十分に近接することを考慮して決定される。|δapp|>δthrにより規定される領域など、δappが許容範囲内ではないかじ取り角間隔の部分において、同一からの逸脱がδappよりも小さいδexへの近似を使用しなければならない。好適には、δexに実質的に等しいδcalの値を使用しなければならない。すなわち、δcalは、
【数86】
に従って決定できる。
【0057】
式(65)からのδcalの値を式(63)及び(64)において使用できる。δexについての許容範囲は、許容可能な逸脱のある量又はパーセンテージなどで規定できる。例えば、2°よりも大きくない逸脱、好適には1°よりも大きくない逸脱である。絶対的又は相対的な項における速度v又は方位変化若しくは双方の最大許容可能逸脱などの他の基準も可能である。
【0058】
図4は、許容可能な逸脱が±1°であるa=0.31の状態を示す。δappが、δex±1°の許容範囲内である場合、δcalは、δappに等しく設定される。δapp=δthrにおいて、δappが許容範囲の境界に達する場合、δcalはδexに切替えられる。
【0059】
|δapp|>δthrの場合にδexに近い近似値にδappを置換する最も一般的な方法は、ルックアップテーブルを使用することである。適当に間隔を空けたδexの値の列のそれぞれ1つについて、δappに対応する値を含み、δappの値は、下方でδthrによって境界され、かつδexがδmaxに等しいときδexに対応するδappの値によって上方で境界される間隔をカバーする。適当なテーブルは、公式(52)及び(62)を使用して所与の車両のために全て一度演算されて、恒久的に記憶される。|δapp|>δthrであるいずれの値のδappにおいても、δexの対応する値は、テーブルから読み出される近接する値の間の線形の補間などによって決定できる。この方法は、追跡装置4において多くの処理動力を要せず、かつメモリの必需量も少量である。
【0060】
しかしながら、δ自体と値が異なるδ´の関数を使用すること、すなわち同一の関数とは異なる関数を使用することも可能である。
【0061】
例えば、式(51)からtanδappの式を導き出すことが可能である。pは、
【数87】
で表される。tanδappの二次方程式の解
【数88】
がもたらされる。式(62)とともに、これはtanδexの関数としてtanδappを得る。ゼロの近傍では、pのこの関数が限定されず、線形近似によって、
【数89】
に置換できる。
【0062】
また逆も同様に、tanδexは、式(60)にpを挿入して式(66)からtanδappの関数として表すことができる。これらの関係を使用して、tanδappの関数としてのtanδexの値を含むルックアップテーブルを演算し、かつ恒久的に記憶することができる。
【0063】
次いで、tanδcalを演算で使用できる。ここで、
【数90】
又は同等に
【数91】
と規定される。
【0064】
次いで、cosδcalは、式(63)及び(64)に従ってvim及びhimを演算するために、tanδcalの関数として、
【数92】
として表すことができる。
【0065】
しかしながら、式(63)及び(64)を使用する場合、余弦を直接使用することがより都合が良い。cosδappは、式(51)から以下のように導き出すことができる。
【数93】
cos2δappの二次方程式を導くと、
【数94】
となり、余弦の解は、
【数95】
となる。ここで再び、cosδexは、cosδappの関数として表すことができる。例えば、正接によって、
【数96】
及び
【数97】
となり、また逆も同様である。これを使用して、cosδapp及びcosδexの対応する対を有するルックアップテーブルを用意できる。これから|δapp|>δthr又は同等に|cosδapp|<cosδthrのために,cosδcalが容易に決定できる。
【0066】
いくらか異なるvimは、
【数98】
又は同様に
【数99】
を使用してtanδexから演算できる。これは、式(41)及び(42)から容易に導き出すことができ、vのための方程式(20a)及び(20b)の正確な解を得る。具体的には、式(75)又は(76)は、tanδexがδapp>δthrなどむしろ大きい場合に採用でき、式(63)は、より小さなδappで使用される。しかし、tanδcalなどによる全ての範囲に亘って公式を使用することができる。
【0067】
一方、himは、vim‐式(63)に従う演算又は式(75)又は(76)に従う演算‐と、式(22)を使用するtanδexとから導き出すこともできる。すなわち、
【数100】
である。これは、式(75)及び(76)を使用してvimを演算する場合、
【数101】
又は同様に
【数102】
に対応する。これは式(44)に従って演算されるhに等しい。すなわち式(20a)から得る正確な解である。再びここで、δapp>δthr又は全ての範囲に亘ってtanδcalについて式(77)のみを使用できる。
【0068】
中間値vim及びhimを簡明な公式(63)及び(64)に従って演算するときに使用することは、演算かじ取り角δcalが〔−35°,+35°〕の間隔を超えて変化する場合ですら多くの場合、適切であることが理解される。
【0069】
十分な処理能力が利用可能である場合、ルックアップテーブルを使用する代わりにδappから直接的にδexを演算するために公式(52)及び(61)を使用することができ、tanδappから直接的にtanδexを演算するために公式(66)及び(60)を使用することができる。さらに、式(23)、(24)及び(30)とともに、速度v及び方位変化hを得る公式(41)及び(44)を使用することができる。これらは、式(20a)及び(20b)の正確な解であり、かじ取り角にδexを使用し、v及びhそれぞれに式(75)又は(76)及び(77)を使用する解に対応する。
【0070】
予測工程に次いでフィルタサイクルを終了させるカルマンフィルタ補正工程において、GNSSの観測方程式は除き、状態v、h、fl及びfrの関数として生の車輪速度Tl及びTrを表す観測方程式は、δcalがパラメータとして計算される場合に使用される。例えば、式(55a)及び(55b)に対応する方程式
【数103】
【数104】
は、式(4a)及び(4b)それぞれに従い表されるvl及びvrとともに採用され、δappはδcalに置換され、Tl及びTrは、観察結果として扱われ、fl、fr、v及びhは未知である。
【符号の説明】
【0071】
1 フレーム
2a、2b 後輪
3a、3b 前輪
4 追跡装置
5a、5b ホイールティックユニット
6 GNSSアンテナ
【特許請求の範囲】
【請求項1】
左前輪(3a)の速度vlを示すパラメータ及び右前輪(3b)の速度vrを示すパラメータを測定し、
前記左前輪(3a)の前記速度vlの値及び前記右前輪(3b)の前記速度vrの値を前記パラメータから導き出し、
前記左前輪(3a)の前記速度vl及び前記右前輪(3b)の前記速度vrから演算かじ取り角δcalの関数を演算することであって、前記演算かじ取り角は、かじ取り角間隔に亘って変化し、
前記演算かじ取り角δcalの前記関数を使用して前記車両の速度v及び方位変化hを演算し、
前記車両の前記演算された速度v及び方位変化hを使用して、前記車両の先の位置及び方位に基づいて前記車両の位置(xref)及び方位(H)の値を演算する、
ことを具備する前輪(3a)及び(3b)の速度に基づく推測航法を少なくとも断続的に使用して車両の位置(xref)及び方位(H)を追跡する方法であって、
前記方位変化hを演算するために使用される前記演算かじ取り角δcalの前記関数に反映される前記演算かじ取り角δcalは、前記かじ取り角間隔の少なくとも一部において、
【数1】
に従い演算される正確なかじ取り角δexから
【数2】
として規定される近似的なかじ取り角の前記正確なかじ取り角δexからの逸脱より小さく逸脱し、aはホイールベースで分割したフロントトラックゲージの半分であり、
【数3】
である方法。
【請求項2】
前記かじ取り角間隔の全体で、前記正確なかじ取り角δexからの前記演算かじ取り角δcalの逸脱の範囲は、2°よりも小さく、好適には1°よりも小さい請求項1に記載の方法。
【請求項3】
前記近似的なかじ取り角δappの関数が演算され、前記近似的なかじ取り角δappがしきい値かじ取り角(δthr)よりも小さい場合、前記方位変化hの演算で使用される前記かじ取り角の関数は、前記演算かじ取り角δcalが前記近似的なかじ取り角δappに等しいことが反映され、前記近似的なかじ取り角δappが前記しきい値かじ取り角(δthr)よりも大きい場合、前記関数は、前記演算かじ取り角δcalが前記近似的なかじ取り角δappと異なり、前記演算かじ取り角δcalが前記近似的なかじ取り角δappの関数から決定されることが反映される請求項1又は2に記載の方法。
【請求項4】
前記近似的なかじ取り角δappの前記関数からの前記演算かじ取り角δcalの前記関数の前記決定において、前記正確なかじ取り角δexの関数の値と、前記近似的なかじ取り角δappの対応する値の関数とからなる対が記憶されるルックアップテーブルが使用される請求項3に記載の方法。
【請求項5】
前記近似的なかじ取り角δappの前記関数の値が前記ルックアップテーブルに記憶されるかじ取り角の2つの値の間である場合に、補間、好適には線形補間が使用される請求項4に記載の方法。
【請求項6】
前記車両の前記速度vは、
【数4】
として演算される請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記車両の前記速度vは、
【数5】
として演算される請求項1〜5のいずれか一項に記載の方法。
【請求項8】
前記方位変化hは、
【数6】
として演算され、lは前記ホイールベースである請求項1〜7のいずれか一項に記載の方法。
【請求項9】
前記車両の前記方位変化hは、
【数7】
として演算され、bは前記フロントトラックゲージの半分である請求項1〜7のいずれか一項に記載の方法。
【請求項10】
前記演算かじ取り角δcalは、間隔〔−35°,+35°〕を含む範囲に亘り変化する請求項1〜9のいずれか一項に記載の方法。
【請求項11】
連続するフィルタサイクルで構成される方法であって、フィルタサイクルそれぞれは、それぞれの場合に前記車両の前記位置(xref)及び前記方位(H)の値が、前記速度v及び前記方向変化hから演算され、演算それぞれは前記位置(xref)及び前記方位(H)の先に確立された値に基づく少なくとも1つの時間更新工程と、前記予測工程で演算された前記位置(xref)及び前記方位(H)の前記値が、GNSSの測定結果が利用可能な場合に、考慮される前記GNSSの測定結果とともに補正される補正工程とを含む請求項1〜10のいずれか一項に記載の方法。
【請求項12】
全ての予測工程は、固定数(N)の連続する時間更新工程を具備する請求項11に記載の方法。
【請求項13】
補正工程それぞれにおいて、測定されるホイールティック数に基づく生の車輪速度(Tl及びTr)から前記左前輪(3a)の前記速度vl及び前記右前輪(3b)の前記速度vrを決定するために使用されるホイール較正係数(fl及びfr)は、再較正される請求項11又は12に記載の方法。
【請求項14】
請求項1〜13のいずれか一項に記載の方法を実行するために車両で利用可能な追跡装置(4)であって、
ホイールティックユニット(5a及び5b)からデータを受信する入力ライン、及び少なくとも1つの基準位置(xref)を提供する出力ライン、並びに処理及びデータ記憶手段を有し、
左前輪(3a)の速度vlを示すセンサ測定結果及び右前輪(3b)の速度vrを示すセンサ測定結果を受信し、
前記左前輪(3a)の前記速度vlの値及び前記右前輪(3b)の前記速度vrの値を前記センサ測定結果から導き出し、
前記左前輪(3a)の前記速度vl及び前記右前輪(3b)の前記速度vrから演算かじ取り角δcalの関数を演算することであって、前記演算かじ取り角δcalは、かじ取り角間隔に亘って変化し、
前記演算かじ取り角δcalの前記関数を使用して前記車両の速度v及び方位変化hを演算し、
前記車両の前記演算された速度v及び方位変化hを使用して、前記車両の先の位置及び方位に基づいて前記車両の前記位置(xref)及び前記方位(H)の値を演算する、
ように構成され、
前記方位変化hを演算するために使用される前記演算かじ取り角δcalの前記関数に反映される前記演算かじ取り角δcalは、前記かじ取り角間隔の少なくとも一部において、
【数8】
に従い演算される正確なかじ取り角δexから
【数9】
として規定される近似的なかじ取り角の前記正確なかじ取り角δexからの逸脱より小さく逸脱し、aはホイールベースで分割したフロントトラックゲージの半分であり、
【数10】
である追跡装置(4)。
【請求項15】
前記かじ取り角間隔の全体で、前記正確なかじ取り角δexからの前記演算かじ取り角δcalの逸脱の範囲は、2°よりも小さく、好適には1°よりも小さい請求項14に記載の追跡装置(4)。
【請求項16】
前記近似的なかじ取り角δappの関数を演算し、前記近似的なかじ取り角δappがしきい値かじ取り角(δthr)よりも小さい場合、前記演算かじ取り角δcalが前記近似的なかじ取り角δappに等しいことが反映される前記方位変化hの演算で前記かじ取り角の関数を使用するように構成され、前記近似的なかじ取り角δappが前記しきい値かじ取り角(δthr)よりも大きい場合、前記関数は、前記演算かじ取り角δcalが前記近似的なかじ取り角δappと異なり、前記演算かじ取り角δcalが前記近似的なかじ取り角δappの関数から決定されることが反映する請求項14又は15に記載の追跡装置(4)。
【請求項17】
前記近似的なかじ取り角δappの前記関数からの前記演算かじ取り角δcalの前記関数の前記決定において、前記正確なかじ取り角δexの関数の値と、前記近似的なかじ取り角δappの対応する値の関数とからなる対が記憶されるルックアップテーブルを使用するように構成される請求項16に記載の追跡装置(4)。
【請求項18】
前記近似的なかじ取り角δappの前記関数の値が前記ルックアップテーブルに記憶されるかじ取り角の2つの値の間である場合に、補間、好適には線形補間を使用するように構成される請求項17に記載の追跡装置(4)。
【請求項19】
GNSSアンテナ(6)から信号を受信する少なくとも1つの入力ラインをさらに有し、連続するフィルタサイクルを実行するように構成される追跡装置であって、フィルタサイクルそれぞれは、それぞれの場合に前記車両の前記位置(xref)及び前記方位(H)の値が、前記速度v及び方向変化hから演算され、演算それぞれは前記位置(xref)及び前記方位(H)の先に確立された値に基づく少なくとも1つの時間更新工程と、前記予測工程で演算された前記位置(xref)及び前記方位(H)の前記値が、GNSSの測定結果が利用可能な場合に、考慮される前記GNSSの測定結果とともに補正される補正工程とを含む請求項14〜18のいずれか一項に記載の追跡装置(4)。
【請求項1】
左前輪(3a)の速度vlを示すパラメータ及び右前輪(3b)の速度vrを示すパラメータを測定し、
前記左前輪(3a)の前記速度vlの値及び前記右前輪(3b)の前記速度vrの値を前記パラメータから導き出し、
前記左前輪(3a)の前記速度vl及び前記右前輪(3b)の前記速度vrから演算かじ取り角δcalの関数を演算することであって、前記演算かじ取り角は、かじ取り角間隔に亘って変化し、
前記演算かじ取り角δcalの前記関数を使用して前記車両の速度v及び方位変化hを演算し、
前記車両の前記演算された速度v及び方位変化hを使用して、前記車両の先の位置及び方位に基づいて前記車両の位置(xref)及び方位(H)の値を演算する、
ことを具備する前輪(3a)及び(3b)の速度に基づく推測航法を少なくとも断続的に使用して車両の位置(xref)及び方位(H)を追跡する方法であって、
前記方位変化hを演算するために使用される前記演算かじ取り角δcalの前記関数に反映される前記演算かじ取り角δcalは、前記かじ取り角間隔の少なくとも一部において、
【数1】
に従い演算される正確なかじ取り角δexから
【数2】
として規定される近似的なかじ取り角の前記正確なかじ取り角δexからの逸脱より小さく逸脱し、aはホイールベースで分割したフロントトラックゲージの半分であり、
【数3】
である方法。
【請求項2】
前記かじ取り角間隔の全体で、前記正確なかじ取り角δexからの前記演算かじ取り角δcalの逸脱の範囲は、2°よりも小さく、好適には1°よりも小さい請求項1に記載の方法。
【請求項3】
前記近似的なかじ取り角δappの関数が演算され、前記近似的なかじ取り角δappがしきい値かじ取り角(δthr)よりも小さい場合、前記方位変化hの演算で使用される前記かじ取り角の関数は、前記演算かじ取り角δcalが前記近似的なかじ取り角δappに等しいことが反映され、前記近似的なかじ取り角δappが前記しきい値かじ取り角(δthr)よりも大きい場合、前記関数は、前記演算かじ取り角δcalが前記近似的なかじ取り角δappと異なり、前記演算かじ取り角δcalが前記近似的なかじ取り角δappの関数から決定されることが反映される請求項1又は2に記載の方法。
【請求項4】
前記近似的なかじ取り角δappの前記関数からの前記演算かじ取り角δcalの前記関数の前記決定において、前記正確なかじ取り角δexの関数の値と、前記近似的なかじ取り角δappの対応する値の関数とからなる対が記憶されるルックアップテーブルが使用される請求項3に記載の方法。
【請求項5】
前記近似的なかじ取り角δappの前記関数の値が前記ルックアップテーブルに記憶されるかじ取り角の2つの値の間である場合に、補間、好適には線形補間が使用される請求項4に記載の方法。
【請求項6】
前記車両の前記速度vは、
【数4】
として演算される請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記車両の前記速度vは、
【数5】
として演算される請求項1〜5のいずれか一項に記載の方法。
【請求項8】
前記方位変化hは、
【数6】
として演算され、lは前記ホイールベースである請求項1〜7のいずれか一項に記載の方法。
【請求項9】
前記車両の前記方位変化hは、
【数7】
として演算され、bは前記フロントトラックゲージの半分である請求項1〜7のいずれか一項に記載の方法。
【請求項10】
前記演算かじ取り角δcalは、間隔〔−35°,+35°〕を含む範囲に亘り変化する請求項1〜9のいずれか一項に記載の方法。
【請求項11】
連続するフィルタサイクルで構成される方法であって、フィルタサイクルそれぞれは、それぞれの場合に前記車両の前記位置(xref)及び前記方位(H)の値が、前記速度v及び前記方向変化hから演算され、演算それぞれは前記位置(xref)及び前記方位(H)の先に確立された値に基づく少なくとも1つの時間更新工程と、前記予測工程で演算された前記位置(xref)及び前記方位(H)の前記値が、GNSSの測定結果が利用可能な場合に、考慮される前記GNSSの測定結果とともに補正される補正工程とを含む請求項1〜10のいずれか一項に記載の方法。
【請求項12】
全ての予測工程は、固定数(N)の連続する時間更新工程を具備する請求項11に記載の方法。
【請求項13】
補正工程それぞれにおいて、測定されるホイールティック数に基づく生の車輪速度(Tl及びTr)から前記左前輪(3a)の前記速度vl及び前記右前輪(3b)の前記速度vrを決定するために使用されるホイール較正係数(fl及びfr)は、再較正される請求項11又は12に記載の方法。
【請求項14】
請求項1〜13のいずれか一項に記載の方法を実行するために車両で利用可能な追跡装置(4)であって、
ホイールティックユニット(5a及び5b)からデータを受信する入力ライン、及び少なくとも1つの基準位置(xref)を提供する出力ライン、並びに処理及びデータ記憶手段を有し、
左前輪(3a)の速度vlを示すセンサ測定結果及び右前輪(3b)の速度vrを示すセンサ測定結果を受信し、
前記左前輪(3a)の前記速度vlの値及び前記右前輪(3b)の前記速度vrの値を前記センサ測定結果から導き出し、
前記左前輪(3a)の前記速度vl及び前記右前輪(3b)の前記速度vrから演算かじ取り角δcalの関数を演算することであって、前記演算かじ取り角δcalは、かじ取り角間隔に亘って変化し、
前記演算かじ取り角δcalの前記関数を使用して前記車両の速度v及び方位変化hを演算し、
前記車両の前記演算された速度v及び方位変化hを使用して、前記車両の先の位置及び方位に基づいて前記車両の前記位置(xref)及び前記方位(H)の値を演算する、
ように構成され、
前記方位変化hを演算するために使用される前記演算かじ取り角δcalの前記関数に反映される前記演算かじ取り角δcalは、前記かじ取り角間隔の少なくとも一部において、
【数8】
に従い演算される正確なかじ取り角δexから
【数9】
として規定される近似的なかじ取り角の前記正確なかじ取り角δexからの逸脱より小さく逸脱し、aはホイールベースで分割したフロントトラックゲージの半分であり、
【数10】
である追跡装置(4)。
【請求項15】
前記かじ取り角間隔の全体で、前記正確なかじ取り角δexからの前記演算かじ取り角δcalの逸脱の範囲は、2°よりも小さく、好適には1°よりも小さい請求項14に記載の追跡装置(4)。
【請求項16】
前記近似的なかじ取り角δappの関数を演算し、前記近似的なかじ取り角δappがしきい値かじ取り角(δthr)よりも小さい場合、前記演算かじ取り角δcalが前記近似的なかじ取り角δappに等しいことが反映される前記方位変化hの演算で前記かじ取り角の関数を使用するように構成され、前記近似的なかじ取り角δappが前記しきい値かじ取り角(δthr)よりも大きい場合、前記関数は、前記演算かじ取り角δcalが前記近似的なかじ取り角δappと異なり、前記演算かじ取り角δcalが前記近似的なかじ取り角δappの関数から決定されることが反映する請求項14又は15に記載の追跡装置(4)。
【請求項17】
前記近似的なかじ取り角δappの前記関数からの前記演算かじ取り角δcalの前記関数の前記決定において、前記正確なかじ取り角δexの関数の値と、前記近似的なかじ取り角δappの対応する値の関数とからなる対が記憶されるルックアップテーブルを使用するように構成される請求項16に記載の追跡装置(4)。
【請求項18】
前記近似的なかじ取り角δappの前記関数の値が前記ルックアップテーブルに記憶されるかじ取り角の2つの値の間である場合に、補間、好適には線形補間を使用するように構成される請求項17に記載の追跡装置(4)。
【請求項19】
GNSSアンテナ(6)から信号を受信する少なくとも1つの入力ラインをさらに有し、連続するフィルタサイクルを実行するように構成される追跡装置であって、フィルタサイクルそれぞれは、それぞれの場合に前記車両の前記位置(xref)及び前記方位(H)の値が、前記速度v及び方向変化hから演算され、演算それぞれは前記位置(xref)及び前記方位(H)の先に確立された値に基づく少なくとも1つの時間更新工程と、前記予測工程で演算された前記位置(xref)及び前記方位(H)の前記値が、GNSSの測定結果が利用可能な場合に、考慮される前記GNSSの測定結果とともに補正される補正工程とを含む請求項14〜18のいずれか一項に記載の追跡装置(4)。
【図1】

【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−98270(P2012−98270A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2011−139699(P2011−139699)
【出願日】平成23年6月23日(2011.6.23)
【出願人】(510145967)ウー−ブロックス アクチェンゲゼルシャフト (2)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成23年6月23日(2011.6.23)
【出願人】(510145967)ウー−ブロックス アクチェンゲゼルシャフト (2)
【Fターム(参考)】
[ Back to top ]