
推進工法用位置計測方法及びその装置
【課題】
複数接続された推進管の折れ角度及び方向を三次元的に即座に計測でき、各計測点の距離から推進管全体の位置を計測できる。
【解決手段】
推進工法において、掘進機1の後部に一端を固定し他端を複数の推進管2の中を通して発進立坑3内で張力をかけた測定用ワイヤ5を設け、当該測定用ワイヤ5を推進管2内の複数の位置で支持させ、当該各支持は、上記測定用ワイヤ5を遊通させる支持体7で支持し、当該支持箇所で測定用ワイヤ5の外周周囲の上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、上記測定用ワイヤの挙動方向により、上記ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する。
複数接続された推進管の折れ角度及び方向を三次元的に即座に計測でき、各計測点の距離から推進管全体の位置を計測できる。
【解決手段】
推進工法において、掘進機1の後部に一端を固定し他端を複数の推進管2の中を通して発進立坑3内で張力をかけた測定用ワイヤ5を設け、当該測定用ワイヤ5を推進管2内の複数の位置で支持させ、当該各支持は、上記測定用ワイヤ5を遊通させる支持体7で支持し、当該支持箇所で測定用ワイヤ5の外周周囲の上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、上記測定用ワイヤの挙動方向により、上記ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、地中埋設管路の推進工法において、推進中の管路の位置計測を先端位置の計測のみならず、リアルタイムで後続管の敷設状況をも把握可能な方法及びその装置に関するものであり、主に800mm以下の小口径管の推進工法において、特に急曲線の推進工法における位置計測に適したものである。
【背景技術】
【0002】
この小口径管の推進工法は、先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法である。この工法において、先端の掘進機及び後続の推進管が地中を計画通り推進しているかどうか、これらの位置を計測し、方向修正しながら地中を推進させている。直線推進の場合は、発進立坑から、掘進機の背面にあるターゲットにレーザー光を照射してその位置を計測することが出来るが、近年、曲線推進施工のニーズが飛躍的に増している。このような曲線推進の位置計測として、現状の実施工で最も確立しているのは、電磁誘導方式である。
【0003】
この電磁誘導方式は、地中の推進ヘッド(ロッド)内に設置した発信器が発する磁力線を、地上の受信器で、最も強く受信する位置を測定して平面位置とし、その際の信号の強さから深度を演算処理して求めるものである。本方式は、海外で実績豊富な弧状推進工法(HDD-System)として一般的に用いられている位置計測方法で、計測方法が簡易で低コストであるが、計測には個人差がでやすい、計測のためには発信器の真上に行かなければならない、発信器と受信器の間に埋設管などの遮蔽物があると計測できない、計測精度があまり高くない、計測は先端位置のみの計測で、途中線形精度が不明(計測地点での測量結果を累積すれば可能であるが、推進後にはロッド復元力が働き、横滑り現象が生じ、計測時の座標と実質敷設位置とでは誤差がでる)、計測は一定の間隔で計測することになり、常に測量結果を反映させての方向制御が出来ない、等の問題点がある。
【0004】
一方、3D曲がりセンサーによる先端ロッド曲がり量計測とチェーンド・ドライブジャイロによる削孔軌跡の併用測量方法は、前記電磁誘導方式の問題点を解決するべく弧状推進工法のドリルの方位、姿勢をドリルに近接して設けたセンサユニットにより計測するシステムを採用しており、また、ジャイロ製作技術の進化で究極に小型化されて直径62mmという極めて小型かつ高精度な位置計測を実現しており、ロッド回転時にも位置計測を行えるといった、工法に即した計測構造である。
【0005】
しかし、この計測方法においても、機械式ジャイロ装置の径は62mmと小型であるが、長さが1925mmであり、また、その材質も剛体であり、同ジャイロ装置箇所はロッド内空間とこのジャイロ装置の外径との間隙分しか曲げられず、この条件から最小曲率は30mR程となり、急曲線の推進工法において要求される曲率(10mR)の確保は困難である。また、曲線推進ではスプリングバックといわれる地中内で直線に戻ろうする力が加わり、横滑り現象が発生するが、こういった場合に測量精度に大幅な誤差を生じる。また、計測装置が非常に高価であるため施工費が高額となる最大要因となっている。
【0006】
そこで、掘削すべきトンネルに沿って、所定の距離をおいて複数の測量定点を設定し、当該複数の測量定点を通過して折り曲がる測量用ワイヤを張架し、各測量定点において測量定点を中心として測量用ワイヤ検出手段を回転させ、測量用ワイヤ検出手段が最初に測量用ワイヤを検出したときの角度と次に測量用ワイヤを検出したときの角度とから各測量定点において測量用ワイヤがなす折れ角度を求め、当該折れ角度と前記所定の距離から各測量定点の位置を求める、小口径の推進工法に適したカーブ測量方法が開発されている。
また。上記と同様に推進管内に継線(ワイヤ)を通し、前後の継線のなす継線角度を継線角度測定器で測定し、推進管のローリングによって発生する傾いた状態の継線角度を水平面に投影した投影角度を継線角度とする補正を行って、継線角度と継線長さから継線のx成分の総和と継線のy成分の総和から掘進機の位置を求めるようにした推進工法における掘進機位置の測定方法が開発されている。
【特許文献1】特開平5−10758号公報
【特許文献2】特開2003−97186号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記前者のカーブ測量方法は小口径管の中にワイヤを通し、所定の距離をおいた測量定点で当該ワイヤの折れ角度を求め、上記所定の距離から各測量定点の位置を求めていって、先端の掘進機の位置を計測するため、小口径推進には適したものであるが、各測量定点でのワイヤの折れ角度の測定が、平面的であり、三次元的に折れ曲がった角度や方向を計測することはできない。また、各測量定点で測量用ワイヤ検出手段によりワイヤの折れ角度を測定する場合、測量用ワイヤ検出手段を各測量定点に移動させなければならない。従って、計測に手間がかかると同時に時間もかかる欠点を有している。また、後者の掘進機位置の測定方法は、継線と継線角度測定器を用いる複雑な計測により掘進機の位置を求めるものであり、掘進機の後続の推進管全体の位置まで計測するものではない。
【0008】
この発明はこれらの点に鑑みて為されたもので、複数接続された推進管の中にワイヤを通し、所定間隔で当該ワイヤを支持し、これらのワイヤの各支持点で、当該ワイヤの折れ角度を三次元的に計測でき、かつ、即座に各支持点の折れ角度と各支持点の距離からこれらの推進管全体の位置を計測できる、推進工法用位置計測方法及びこれに使用する装置を提供し上記課題を解決しようとするものである。
【課題を解決するための手段】
【0009】
そこで、請求項1の発明は、先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、当該測定用ワイヤを遊通させる支持体で支持し、当該支持体箇所で当該測定用ワイヤの外周周囲の少なくとも上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、上記測定用ワイヤの挙動方向により、当該測定用ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する、推進工法用位置計測方法とした。
【0010】
また、請求項2の発明は、上記請求項1の発明において、各支持点における上記測定用ワイヤの張力は、発進立坑箇所で測定した測定用ワイヤの張力値を基にして、発進立坑から各支持点までの距離により各支持点の張力値を算出する、推進工法用位置計測方法とした。
【0011】
また、請求項3の発明は、上記請求項1又は2に記載の発明の方法に使用する装置であって、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を当該推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の位置で支持させ、当該測定用ワイヤの各支持は上記推進管の内部に固定した支持体に支持し、これらの各支持体は、複数のスペーサにより一定間隔を保持したフランジを二枚相対向して設け、これらのフランジの相対向する内面に、二つの管体を相対向して設け、これらの各管体の先端は相互に一定の間隔をあけ、上記管体の外周周囲の少なくとも上下左右の四箇所に、各管体の外周から一定幅離れてゲージプレートを夫々設け、これらのゲージプレートは上記二枚のフランジの間に渡されて支持され、これらのゲージプレートの各外面に歪みゲージが設けられ、上記二つの管体の先端の間隙に、中心孔を有する円板が挿入され、当該円板は、上記少なくとも上下左右の4枚のゲージプレートに囲まれているが、円板の外周と各ゲージプレートの内面との間に隙間を有し、上記測定用ワイヤはこの支持体の上記一方のフランジに開口部を有する一方の管体から挿入され、上記円板の中心孔を通り、他方の管体を通って他方のフランジの開口部から外方に抜けており、上記測定用ワイヤは、上記円板の中心孔及び上記管体内で長手方向に摺動自在であり、当該長手方向に直角な面方向に対しては円板の外周が四方のゲージプレートのいずれかの内面に当たるまで、移動自在となっており、また、上記支持体に回転角度計を設け、上記測定用ワイヤの挙動方向により、上記円板が上記ゲージプレートの一つ又は複数を押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して測定用ワイヤの折れ角度を計測し、かつ上記回転角度計で検知した推進管の鉛直軸の傾き状態を勘案して上記荷重がかかった歪みゲージの位置から測定用ワイヤの折れ方向を計測し、発進立坑から各支持点までの距離から、上記掘進機及び複数の推進管の位置を計測する、推進工法用位置計測装置とした。
【0012】
また、請求項4の発明は、先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを上記発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、上記推進管の内部に固定した支持体内のフランジを有する横長の軸からなる接続体に支持させ、当該測定用ワイヤを当該各支持体箇所で分断し、これらの分断端部を当該接続体の両端で連結し、上記支持体内の接続体のフランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、上記測定用ワイヤの挙動方向により、当該測定用ワイヤが上記歪みゲージを押圧して荷重をかけ、当該荷重がかかった歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点で上記測定用ワイヤの張力を測定して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する推進工法用位置計測方法とした。
【0013】
また、請求項5の発明は、上記請求項4の発明において、各支持点における上記測定用ワイヤの張力は、各支持点において張力計により各支持点の間の上記測定用ワイヤの張力を測定する推進工法用位置計測方法とした。また、請求項6の発明は、上記請求項4又は5に記載の発明の方法に使用する装置であって、上記測定用ワイヤの各支持が、上記推進管の内部に固定した支持体内に、中央にフランジを有する横長の軸からなる接続体を挿入して、上記フランジで上記支持体の内周に支持させ、当該支持点で測定用ワイヤを分断し、これらの分断端部を上記接続体の両端で連結し、上記支持体内の接続体の、フランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、また、フランジを挟んだ他方の側の軸の外周に少なくとも2個以上の張力計、及び回転角度計をそれぞれ設けて支持した推進工法用位置計測装置とした。また、請求項7の発明は、上記請求項1、2、4及び5のいずれかに記載の位置計測方法において、上記推進工法に使用する管路が小口径であり、急曲線の推進工法である推進工法用位置計測方法とした。
【発明の効果】
【0014】
請求項1、2、4及び5の各発明によれば、推進管内に測定用ワイヤを通して、当該測定用ワイヤの複数の支持点で、当該測定用ワイヤ又はその接続体の外周周囲に設けた、歪みゲージにより、当該ワイヤの折れ角度及び折れ方向を計測するため、推進管内で場所をとらず、当該推進管の位置計測が可能である。しかも、先端の掘進機や推進管の位置のみならず、後続の推進管の敷設状況全体を把握可能である。また、地中の地盤のゆるい箇所は発進立坑から推進管の後部を押圧した場合、地盤が反力受けとならず推進管の先端部が横滑りすることがあるが、その場合でも、推進管内部で計測するため、推進管全体の位置を正確に検出できる。また、各支持点での測定用ワイヤの折れ角度や方向を三次元的に計測でき、極めて精度の高い計測が出来る。また、予め発進立坑からの距離の分かっている各支持点で上記測定用ワイヤの折れ角度や方向を計測するため、各支持点で同時に計測可能であり、掘進機及び複数の推進管の位置を即座に計測でき、かつ、リアルタイムな計測ができる。また、特に、請求項5の発明では、各支持点で当該箇所の測定用ワイヤの張力を計測するため、当該支持点箇所にコンピュータを設ければ、その場所で測定用ワイヤの折れ曲がり角度及び方向を計測することができ、従って当該コンピュータの出力用の配線のみを導出すればよく、各支持点からの配線を簡素化できる。
【0015】
また、請求項3及び6の発明では、各支持点で測定用ワイヤの折れ角度及び方向を計測できるのに加え、回転角度計を設けたことにより、当該支持点を有する推進管のローリング状態を検出することが出来、測定用ワイヤの折れ曲がり方向をより正確に把握でき、より精度の高い位置計測が出来る。また、請求項7の発明は、上記請求項1,2、3又は4の位置計測方法を小口径管路の推進工法に適用したものであり、上記請求項1,2、3又は4の位置計測方法は、特に小口径管路及び急曲線推進に最適である。
【発明を実施するための最良の形態】
【0016】
先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を当該推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、上記ワイヤを中心孔に貫通させた円板外周の少なくとも上下左右の4箇所に、歪みゲージを設けたゲージプレートを固定し、かつ、上記円板の前後に、円板の測定用ワイヤの長手方向の移動を規制する、上記測定用ワイヤを遊貫した管体を固定した支持体を推進管の内部に設け、また、上記支持体に回転角度計を設け、上記測定用ワイヤの挙動方向により、上記円板がゲージプレートの一つ又は複数を押して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して測定ワイヤの折れ角度を計測し、かつ上記回転角度計で推進管のローリング(鉛直軸の傾き)状態を勘案して上記測定用ワイヤの折れ曲がり方向を計測し、発進立坑から各支持点までの距離から、上記掘進機及び複数の推進管の位置を計測する、推進工法用位置計測方法とした。
【実施例1】
【0017】
以下この発明を図面に基づいて説明する。
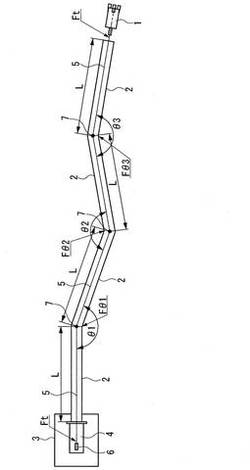
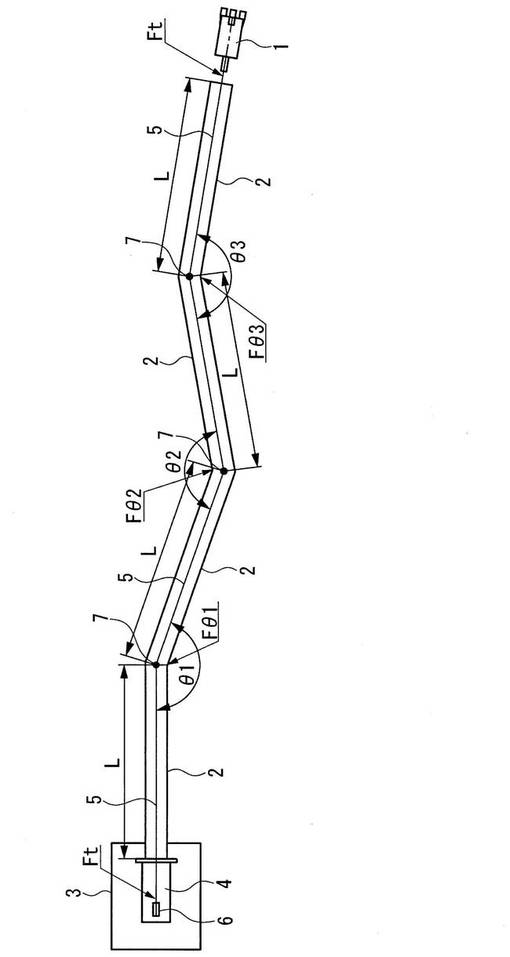
図1はこの発明の推進工法用位置計測方法の概略構成図を示すもので、まず、推進工法は、図1に示すように、先端の掘進機1で地中を掘削しながら当該掘進機1の後方に一定長の推進管2を次々と連結して同推進管2の最後尾を発進立坑3に設けた押圧装置4により押圧し、発進立坑3から目標位置まで直進又は湾曲して推進する工法である。そしてこの工法に使用する位置計測方法には、上記掘進機1の後部に測定用ワイヤ5の一端を固定し、他端を後続の複数の推進管2内に、各推進管2とほぼ平行に通し、最後尾の推進管2から発進立坑3に導出して当該発進立坑3内でテンション装置6により当該測定用ワイヤ5に一定の張力をかけておく。そして、当該測定用ワイヤ5は、各推進管2内の一端部で支持させる。当該測定用ワイヤ5の各支持は、各推進管2の内側に支持された支持体7により、ワイヤの長手方向に摺動自在かつ当該長手方向に直角な方向に揺動自在に上記測定用ワイヤ5を遊通させており、これらの各支持体7箇所で、測定用ワイヤ5の折れ角度及び方向を計測する構成となっている。
【0018】
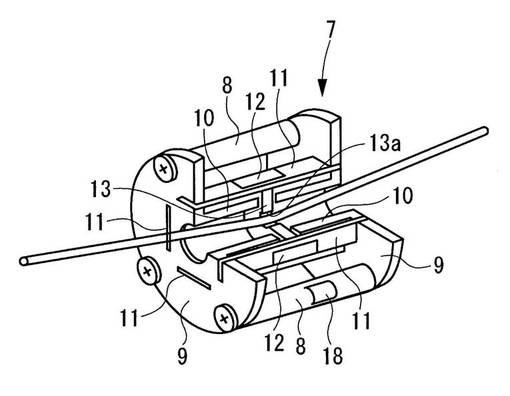
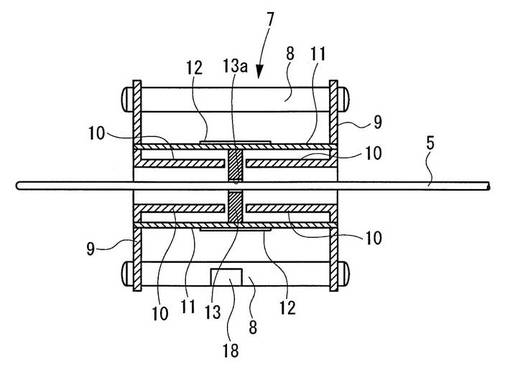
図2及び図3は、上記支持体7の具体例を示す、一部切欠斜視図及び縦断面図である。この支持体7は、複数のスペーサ8を介在させて一定間隔のフランジ9を二枚相対向して設け、これらのフランジ9、9の相対向する内面に、二つの同径の管体10、10を相対向して設け、これらの各管体10の先端は一定の間隔をあけ、上記管体10、10の上下左右の位置に、各管体10の外周から一定幅離れてゲージプレート11を夫々設け、これらの4枚のゲージプレート11は上記二枚のフランジ9と9の間に渡され支持されている。また、これらのゲージプレート11の各外面には歪みゲージ12が設けられている。さらに、上記管体10と10の先端の間隙に、中心孔13aを有する円板13が挿入され、当該円板13は、上記4枚のゲージプレート11に囲まれているが、円板13の外周と各ゲージプレート11の内面との間に隙間を有している。また、上記スペーサ8の一つに、回転角度計18を設けている。
【0019】
そして、上記測定用ワイヤ5はこの支持体7の上記一方のフランジ9に開口部を有する一方の管体10から挿入され、円板13の中心孔13aを通り、他方の管体10を通って他方のフランジ9の開口部から外方に抜けている。従って、測定用ワイヤ5は、上記円板13の中心孔13aに挿通されているが、長手方向に摺動自在であり、当該長手方向に直角な面方向に対しては円板13の外周が四方のゲージプレート11のいずれかの内面に当たるまで、移動自在となっている。
【0020】
従って、接続された二つの推進管2が一方に対して折れ曲がると、測定用ワイヤが折れ曲がり、その挙動方向により上記円板13が一つ又は複数のゲージプレート11を押圧して荷重をかけ、当該荷重がかかったゲージプレート11の歪みゲージ12が歪む。そこで、この歪みゲージ12の示す歪み量と荷重がかかった歪みゲージ12の位置を検出する。この歪みゲージ12の歪み量により測定用ワイヤ5の折れ角度を検出しようとするものであるが、この歪み量は測定用ワイヤ5の張力によって異なる。そこで、張力値と歪みゲージの歪み量との関係を予め算出しておく。そして当該支持体7箇所の測定用ワイヤ5の張力を計測する。各推進管2の長さが決まっているため、発進立坑3から当該支持体7までの測定用ワイヤ5の長さが分かる。また、発進立坑3で当該測定用ワイヤ5の張力値Ftを測定する。この張力値Ftを基に各支持体7までの距離によって減衰した値を算出し、図1に示す各支持体7箇所の張力Fθ1、Fθ2、Fθ3が得られ、これらの得られたFθを基にして、上記歪みゲージ12の歪み量から計算により各支持体7箇所での測定用ワイヤ5の折曲角度θ1、θ2、…θnを得ることが出来る。
【0021】
なお、また、折れ曲がり方向は、上記荷重のかかった歪みゲージ12の位置から検出できる。その際、上記支持体7に回転角度計18を設けているため、当該支持体7の推進管2のローリング状態が分かり、上記荷重のかかった歪みゲージ12の位置を補正できる。また各支持点(支持体7)までの距離は、上述のように、推進管2の長さLが分かっているため算出できる。これにより、各支持点での折れ角度及び方向、及び発進立坑3から各支持点までの距離がわかるため、推進座標を計算推測することができる。なお、この実施例においても、上記各支持体7箇所ごとに張力計を設けて当該箇所の測定用ワイヤ5の張力を測定し、この張力値に基づいて歪みゲージ12の歪み量から折れ角度を計測することも出来る。
【0022】
図4は、上記支持体7の他の具体例を示す側面図である。この支持体7´は上記推進管2の内周に固定した支持管体16内に、中央にフランジ15aを有する横長の軸からなる接続体15を挿入して、上記フランジ15aを上記支持管体16の内周に摺動自在に支持させ、当該支持点で測定用ワイヤ5を分断し、これらの分断端部を上記接続体15の両端で連結し、上記支持管体16内の接続体15の、フランジ15aを挟んだ一方の側の軸の外周上下左右の4箇所に歪みゲージ12を設け、また、フランジ15aを挟んだ他方の側の軸の外周の相対向する面に2枚の引張り力検出歪みゲージ17を設け、さらに当該他方の側の軸の外周に回転角度計18を設けたものである。
【0023】
この支持体7´は、図4の左側を発進立坑3側に、右側を掘削機1側に接続し、掘進機1側の前方の推進管2が折れ曲がると測定用ワイヤ5が折れ曲がり、それに続くフランジ15aを挟んだ歪みゲージ12を有する接続体15の一側が歪み、上下左右にある歪みゲージ12の一つ又は複数の歪みゲージ12が歪む。これにより歪んだ歪みゲージ12の歪み量と歪み位置を検出し、上記フランジ15aを挟んだ接続体15の他側の引張り力検出歪みゲージ17により測定した、隣接する他の支持体7´との間の張力値を勘案して、当該接続体7´箇所の測定用ワイヤ5の折れ角度及び方向を検出する。さらに回転角度計18により当該推進管2のローリング状態を検出し、発進立坑3からの当該支持体7´間での距離により、当該距離と上記角度及び方向で推進座標を計算推測することができる。また、このように各支持体7´箇所で測定用ワイヤ5の張力値及び歪みゲージの歪み量を検出し、当該支持点箇所にコンピュータを設ければ(図示省略)、その場所で測定用ワイヤ5の折れ曲がり角度及び方向を計測することができ、従って当該コンピュータの出力用の配線のみを導出すればよい。
【0024】
図5は、この発明の位置計測に使用する実際の装置の断面図を示し、上記各推進管2内に、一回り小径の各ケーシング管20を挿入し、各ケーシング管20は外周の複数箇所に設けたガイドローラ21を各推進管20の内周面に回転自在に当接させて支持させている。そしてこれらの各ケーシング管20内に上記測定用ワイヤ5を通し、このケーシング管20内に設けた支持体7で当該測定用ワイヤ5を支持している。また、上記掘進機1は先頭の推進管2の先端に支持固定され(図示省略)、掘進機1の回転軸(図示省略)は、上記ケーシング管20内に回転自在に設けた回転ロッド22の先端に接続され、当該回転ロッド22の基端は発進立坑3内の油圧回転モータ(図示省略)に接続されている。なお、図中、22aは注水パイプ、23は上記掘進機1で掘削した土砂の排泥ホース、24は滑剤供給ホース、25は方向修正用油圧ホース、26はワイヤ式計測器データ処理部、27はワイヤ式計測器データリンクケーブル、28は傾斜計等補助計測装置である。
【0025】
なお、上記実施例では測定用ワイヤの一端を掘進機1の後部に固定しているが、これに限らず、先頭の推進管2の先端部、又は先頭のケーシング管20の先端部等、掘進機1の後部付近であれば良い。また、上記実施例では測定用ワイヤ5又は接続体15の軸の周囲又は外周の上下左右に4枚の歪みゲージ12を有するゲージプレート11又は歪みゲージ12を設けているが、上下左右のみでなく、これらの間に、歪みゲージ12を有するゲージプレート11又は歪みゲージ12を夫々入れて、合計8枚、16枚にしても良い。これらの歪みゲージ12を有するゲージプレート11又は歪みゲージ12の数は、4枚以上であれば良い。また、上記実施例では、支持体7´の引張り力検出歪みゲージ17は相対向する面に2枚設けたが、この引張り力検出歪みゲージ17は精度を上げるために4枚、6枚、8枚等、偶数の枚数のゲージを設けることもある。さらに、この引張り力検出歪みゲージに代えて、他の適宜の張力計を用いても良い。
【図面の簡単な説明】
【0026】
【図1】この発明の方法の概略構成図である。
【図2】この発明の方法に使用する支持体の一部切欠斜視図である。
【図3】この発明の方法に使用する支持体の縦断面図である。
【図4】この発明の方法に使用する支持体の他の例を示す側面図である。
【図5】この発明の方法に使用する実際の装置の断面図である。
【符号の説明】
【0027】
1 掘進機
2 推進管
3 発進立坑
4 押圧装置
5 測定用ワイヤ
6 テンション装置
7 支持体
7´ 支持体
8 スペーサ
9 フランジ
10 管体
11 ゲージプレート
12 歪みゲージ
13 円板
13a 中心孔
15 接続体
15a フランジ
16 支持管体
17 引張り力検出歪みゲージ
18 回転角度計
20 ケーシング管
21 ガイドローラ
22 回転ロッド
22a 注水ホース
23 排泥ホース
24 滑剤供給ホース
25 方向修正用油圧ホース
26 ワイヤ式計測器データ処理部
27 ワイヤ式計測器データリンクケーブル
28 傾斜計等補助計測装置
【技術分野】
【0001】
この発明は、地中埋設管路の推進工法において、推進中の管路の位置計測を先端位置の計測のみならず、リアルタイムで後続管の敷設状況をも把握可能な方法及びその装置に関するものであり、主に800mm以下の小口径管の推進工法において、特に急曲線の推進工法における位置計測に適したものである。
【背景技術】
【0002】
この小口径管の推進工法は、先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法である。この工法において、先端の掘進機及び後続の推進管が地中を計画通り推進しているかどうか、これらの位置を計測し、方向修正しながら地中を推進させている。直線推進の場合は、発進立坑から、掘進機の背面にあるターゲットにレーザー光を照射してその位置を計測することが出来るが、近年、曲線推進施工のニーズが飛躍的に増している。このような曲線推進の位置計測として、現状の実施工で最も確立しているのは、電磁誘導方式である。
【0003】
この電磁誘導方式は、地中の推進ヘッド(ロッド)内に設置した発信器が発する磁力線を、地上の受信器で、最も強く受信する位置を測定して平面位置とし、その際の信号の強さから深度を演算処理して求めるものである。本方式は、海外で実績豊富な弧状推進工法(HDD-System)として一般的に用いられている位置計測方法で、計測方法が簡易で低コストであるが、計測には個人差がでやすい、計測のためには発信器の真上に行かなければならない、発信器と受信器の間に埋設管などの遮蔽物があると計測できない、計測精度があまり高くない、計測は先端位置のみの計測で、途中線形精度が不明(計測地点での測量結果を累積すれば可能であるが、推進後にはロッド復元力が働き、横滑り現象が生じ、計測時の座標と実質敷設位置とでは誤差がでる)、計測は一定の間隔で計測することになり、常に測量結果を反映させての方向制御が出来ない、等の問題点がある。
【0004】
一方、3D曲がりセンサーによる先端ロッド曲がり量計測とチェーンド・ドライブジャイロによる削孔軌跡の併用測量方法は、前記電磁誘導方式の問題点を解決するべく弧状推進工法のドリルの方位、姿勢をドリルに近接して設けたセンサユニットにより計測するシステムを採用しており、また、ジャイロ製作技術の進化で究極に小型化されて直径62mmという極めて小型かつ高精度な位置計測を実現しており、ロッド回転時にも位置計測を行えるといった、工法に即した計測構造である。
【0005】
しかし、この計測方法においても、機械式ジャイロ装置の径は62mmと小型であるが、長さが1925mmであり、また、その材質も剛体であり、同ジャイロ装置箇所はロッド内空間とこのジャイロ装置の外径との間隙分しか曲げられず、この条件から最小曲率は30mR程となり、急曲線の推進工法において要求される曲率(10mR)の確保は困難である。また、曲線推進ではスプリングバックといわれる地中内で直線に戻ろうする力が加わり、横滑り現象が発生するが、こういった場合に測量精度に大幅な誤差を生じる。また、計測装置が非常に高価であるため施工費が高額となる最大要因となっている。
【0006】
そこで、掘削すべきトンネルに沿って、所定の距離をおいて複数の測量定点を設定し、当該複数の測量定点を通過して折り曲がる測量用ワイヤを張架し、各測量定点において測量定点を中心として測量用ワイヤ検出手段を回転させ、測量用ワイヤ検出手段が最初に測量用ワイヤを検出したときの角度と次に測量用ワイヤを検出したときの角度とから各測量定点において測量用ワイヤがなす折れ角度を求め、当該折れ角度と前記所定の距離から各測量定点の位置を求める、小口径の推進工法に適したカーブ測量方法が開発されている。
また。上記と同様に推進管内に継線(ワイヤ)を通し、前後の継線のなす継線角度を継線角度測定器で測定し、推進管のローリングによって発生する傾いた状態の継線角度を水平面に投影した投影角度を継線角度とする補正を行って、継線角度と継線長さから継線のx成分の総和と継線のy成分の総和から掘進機の位置を求めるようにした推進工法における掘進機位置の測定方法が開発されている。
【特許文献1】特開平5−10758号公報
【特許文献2】特開2003−97186号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記前者のカーブ測量方法は小口径管の中にワイヤを通し、所定の距離をおいた測量定点で当該ワイヤの折れ角度を求め、上記所定の距離から各測量定点の位置を求めていって、先端の掘進機の位置を計測するため、小口径推進には適したものであるが、各測量定点でのワイヤの折れ角度の測定が、平面的であり、三次元的に折れ曲がった角度や方向を計測することはできない。また、各測量定点で測量用ワイヤ検出手段によりワイヤの折れ角度を測定する場合、測量用ワイヤ検出手段を各測量定点に移動させなければならない。従って、計測に手間がかかると同時に時間もかかる欠点を有している。また、後者の掘進機位置の測定方法は、継線と継線角度測定器を用いる複雑な計測により掘進機の位置を求めるものであり、掘進機の後続の推進管全体の位置まで計測するものではない。
【0008】
この発明はこれらの点に鑑みて為されたもので、複数接続された推進管の中にワイヤを通し、所定間隔で当該ワイヤを支持し、これらのワイヤの各支持点で、当該ワイヤの折れ角度を三次元的に計測でき、かつ、即座に各支持点の折れ角度と各支持点の距離からこれらの推進管全体の位置を計測できる、推進工法用位置計測方法及びこれに使用する装置を提供し上記課題を解決しようとするものである。
【課題を解決するための手段】
【0009】
そこで、請求項1の発明は、先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、当該測定用ワイヤを遊通させる支持体で支持し、当該支持体箇所で当該測定用ワイヤの外周周囲の少なくとも上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、上記測定用ワイヤの挙動方向により、当該測定用ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する、推進工法用位置計測方法とした。
【0010】
また、請求項2の発明は、上記請求項1の発明において、各支持点における上記測定用ワイヤの張力は、発進立坑箇所で測定した測定用ワイヤの張力値を基にして、発進立坑から各支持点までの距離により各支持点の張力値を算出する、推進工法用位置計測方法とした。
【0011】
また、請求項3の発明は、上記請求項1又は2に記載の発明の方法に使用する装置であって、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を当該推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の位置で支持させ、当該測定用ワイヤの各支持は上記推進管の内部に固定した支持体に支持し、これらの各支持体は、複数のスペーサにより一定間隔を保持したフランジを二枚相対向して設け、これらのフランジの相対向する内面に、二つの管体を相対向して設け、これらの各管体の先端は相互に一定の間隔をあけ、上記管体の外周周囲の少なくとも上下左右の四箇所に、各管体の外周から一定幅離れてゲージプレートを夫々設け、これらのゲージプレートは上記二枚のフランジの間に渡されて支持され、これらのゲージプレートの各外面に歪みゲージが設けられ、上記二つの管体の先端の間隙に、中心孔を有する円板が挿入され、当該円板は、上記少なくとも上下左右の4枚のゲージプレートに囲まれているが、円板の外周と各ゲージプレートの内面との間に隙間を有し、上記測定用ワイヤはこの支持体の上記一方のフランジに開口部を有する一方の管体から挿入され、上記円板の中心孔を通り、他方の管体を通って他方のフランジの開口部から外方に抜けており、上記測定用ワイヤは、上記円板の中心孔及び上記管体内で長手方向に摺動自在であり、当該長手方向に直角な面方向に対しては円板の外周が四方のゲージプレートのいずれかの内面に当たるまで、移動自在となっており、また、上記支持体に回転角度計を設け、上記測定用ワイヤの挙動方向により、上記円板が上記ゲージプレートの一つ又は複数を押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して測定用ワイヤの折れ角度を計測し、かつ上記回転角度計で検知した推進管の鉛直軸の傾き状態を勘案して上記荷重がかかった歪みゲージの位置から測定用ワイヤの折れ方向を計測し、発進立坑から各支持点までの距離から、上記掘進機及び複数の推進管の位置を計測する、推進工法用位置計測装置とした。
【0012】
また、請求項4の発明は、先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを上記発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、上記推進管の内部に固定した支持体内のフランジを有する横長の軸からなる接続体に支持させ、当該測定用ワイヤを当該各支持体箇所で分断し、これらの分断端部を当該接続体の両端で連結し、上記支持体内の接続体のフランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、上記測定用ワイヤの挙動方向により、当該測定用ワイヤが上記歪みゲージを押圧して荷重をかけ、当該荷重がかかった歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点で上記測定用ワイヤの張力を測定して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する推進工法用位置計測方法とした。
【0013】
また、請求項5の発明は、上記請求項4の発明において、各支持点における上記測定用ワイヤの張力は、各支持点において張力計により各支持点の間の上記測定用ワイヤの張力を測定する推進工法用位置計測方法とした。また、請求項6の発明は、上記請求項4又は5に記載の発明の方法に使用する装置であって、上記測定用ワイヤの各支持が、上記推進管の内部に固定した支持体内に、中央にフランジを有する横長の軸からなる接続体を挿入して、上記フランジで上記支持体の内周に支持させ、当該支持点で測定用ワイヤを分断し、これらの分断端部を上記接続体の両端で連結し、上記支持体内の接続体の、フランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、また、フランジを挟んだ他方の側の軸の外周に少なくとも2個以上の張力計、及び回転角度計をそれぞれ設けて支持した推進工法用位置計測装置とした。また、請求項7の発明は、上記請求項1、2、4及び5のいずれかに記載の位置計測方法において、上記推進工法に使用する管路が小口径であり、急曲線の推進工法である推進工法用位置計測方法とした。
【発明の効果】
【0014】
請求項1、2、4及び5の各発明によれば、推進管内に測定用ワイヤを通して、当該測定用ワイヤの複数の支持点で、当該測定用ワイヤ又はその接続体の外周周囲に設けた、歪みゲージにより、当該ワイヤの折れ角度及び折れ方向を計測するため、推進管内で場所をとらず、当該推進管の位置計測が可能である。しかも、先端の掘進機や推進管の位置のみならず、後続の推進管の敷設状況全体を把握可能である。また、地中の地盤のゆるい箇所は発進立坑から推進管の後部を押圧した場合、地盤が反力受けとならず推進管の先端部が横滑りすることがあるが、その場合でも、推進管内部で計測するため、推進管全体の位置を正確に検出できる。また、各支持点での測定用ワイヤの折れ角度や方向を三次元的に計測でき、極めて精度の高い計測が出来る。また、予め発進立坑からの距離の分かっている各支持点で上記測定用ワイヤの折れ角度や方向を計測するため、各支持点で同時に計測可能であり、掘進機及び複数の推進管の位置を即座に計測でき、かつ、リアルタイムな計測ができる。また、特に、請求項5の発明では、各支持点で当該箇所の測定用ワイヤの張力を計測するため、当該支持点箇所にコンピュータを設ければ、その場所で測定用ワイヤの折れ曲がり角度及び方向を計測することができ、従って当該コンピュータの出力用の配線のみを導出すればよく、各支持点からの配線を簡素化できる。
【0015】
また、請求項3及び6の発明では、各支持点で測定用ワイヤの折れ角度及び方向を計測できるのに加え、回転角度計を設けたことにより、当該支持点を有する推進管のローリング状態を検出することが出来、測定用ワイヤの折れ曲がり方向をより正確に把握でき、より精度の高い位置計測が出来る。また、請求項7の発明は、上記請求項1,2、3又は4の位置計測方法を小口径管路の推進工法に適用したものであり、上記請求項1,2、3又は4の位置計測方法は、特に小口径管路及び急曲線推進に最適である。
【発明を実施するための最良の形態】
【0016】
先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を当該推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、上記ワイヤを中心孔に貫通させた円板外周の少なくとも上下左右の4箇所に、歪みゲージを設けたゲージプレートを固定し、かつ、上記円板の前後に、円板の測定用ワイヤの長手方向の移動を規制する、上記測定用ワイヤを遊貫した管体を固定した支持体を推進管の内部に設け、また、上記支持体に回転角度計を設け、上記測定用ワイヤの挙動方向により、上記円板がゲージプレートの一つ又は複数を押して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して測定ワイヤの折れ角度を計測し、かつ上記回転角度計で推進管のローリング(鉛直軸の傾き)状態を勘案して上記測定用ワイヤの折れ曲がり方向を計測し、発進立坑から各支持点までの距離から、上記掘進機及び複数の推進管の位置を計測する、推進工法用位置計測方法とした。
【実施例1】
【0017】
以下この発明を図面に基づいて説明する。
図1はこの発明の推進工法用位置計測方法の概略構成図を示すもので、まず、推進工法は、図1に示すように、先端の掘進機1で地中を掘削しながら当該掘進機1の後方に一定長の推進管2を次々と連結して同推進管2の最後尾を発進立坑3に設けた押圧装置4により押圧し、発進立坑3から目標位置まで直進又は湾曲して推進する工法である。そしてこの工法に使用する位置計測方法には、上記掘進機1の後部に測定用ワイヤ5の一端を固定し、他端を後続の複数の推進管2内に、各推進管2とほぼ平行に通し、最後尾の推進管2から発進立坑3に導出して当該発進立坑3内でテンション装置6により当該測定用ワイヤ5に一定の張力をかけておく。そして、当該測定用ワイヤ5は、各推進管2内の一端部で支持させる。当該測定用ワイヤ5の各支持は、各推進管2の内側に支持された支持体7により、ワイヤの長手方向に摺動自在かつ当該長手方向に直角な方向に揺動自在に上記測定用ワイヤ5を遊通させており、これらの各支持体7箇所で、測定用ワイヤ5の折れ角度及び方向を計測する構成となっている。
【0018】
図2及び図3は、上記支持体7の具体例を示す、一部切欠斜視図及び縦断面図である。この支持体7は、複数のスペーサ8を介在させて一定間隔のフランジ9を二枚相対向して設け、これらのフランジ9、9の相対向する内面に、二つの同径の管体10、10を相対向して設け、これらの各管体10の先端は一定の間隔をあけ、上記管体10、10の上下左右の位置に、各管体10の外周から一定幅離れてゲージプレート11を夫々設け、これらの4枚のゲージプレート11は上記二枚のフランジ9と9の間に渡され支持されている。また、これらのゲージプレート11の各外面には歪みゲージ12が設けられている。さらに、上記管体10と10の先端の間隙に、中心孔13aを有する円板13が挿入され、当該円板13は、上記4枚のゲージプレート11に囲まれているが、円板13の外周と各ゲージプレート11の内面との間に隙間を有している。また、上記スペーサ8の一つに、回転角度計18を設けている。
【0019】
そして、上記測定用ワイヤ5はこの支持体7の上記一方のフランジ9に開口部を有する一方の管体10から挿入され、円板13の中心孔13aを通り、他方の管体10を通って他方のフランジ9の開口部から外方に抜けている。従って、測定用ワイヤ5は、上記円板13の中心孔13aに挿通されているが、長手方向に摺動自在であり、当該長手方向に直角な面方向に対しては円板13の外周が四方のゲージプレート11のいずれかの内面に当たるまで、移動自在となっている。
【0020】
従って、接続された二つの推進管2が一方に対して折れ曲がると、測定用ワイヤが折れ曲がり、その挙動方向により上記円板13が一つ又は複数のゲージプレート11を押圧して荷重をかけ、当該荷重がかかったゲージプレート11の歪みゲージ12が歪む。そこで、この歪みゲージ12の示す歪み量と荷重がかかった歪みゲージ12の位置を検出する。この歪みゲージ12の歪み量により測定用ワイヤ5の折れ角度を検出しようとするものであるが、この歪み量は測定用ワイヤ5の張力によって異なる。そこで、張力値と歪みゲージの歪み量との関係を予め算出しておく。そして当該支持体7箇所の測定用ワイヤ5の張力を計測する。各推進管2の長さが決まっているため、発進立坑3から当該支持体7までの測定用ワイヤ5の長さが分かる。また、発進立坑3で当該測定用ワイヤ5の張力値Ftを測定する。この張力値Ftを基に各支持体7までの距離によって減衰した値を算出し、図1に示す各支持体7箇所の張力Fθ1、Fθ2、Fθ3が得られ、これらの得られたFθを基にして、上記歪みゲージ12の歪み量から計算により各支持体7箇所での測定用ワイヤ5の折曲角度θ1、θ2、…θnを得ることが出来る。
【0021】
なお、また、折れ曲がり方向は、上記荷重のかかった歪みゲージ12の位置から検出できる。その際、上記支持体7に回転角度計18を設けているため、当該支持体7の推進管2のローリング状態が分かり、上記荷重のかかった歪みゲージ12の位置を補正できる。また各支持点(支持体7)までの距離は、上述のように、推進管2の長さLが分かっているため算出できる。これにより、各支持点での折れ角度及び方向、及び発進立坑3から各支持点までの距離がわかるため、推進座標を計算推測することができる。なお、この実施例においても、上記各支持体7箇所ごとに張力計を設けて当該箇所の測定用ワイヤ5の張力を測定し、この張力値に基づいて歪みゲージ12の歪み量から折れ角度を計測することも出来る。
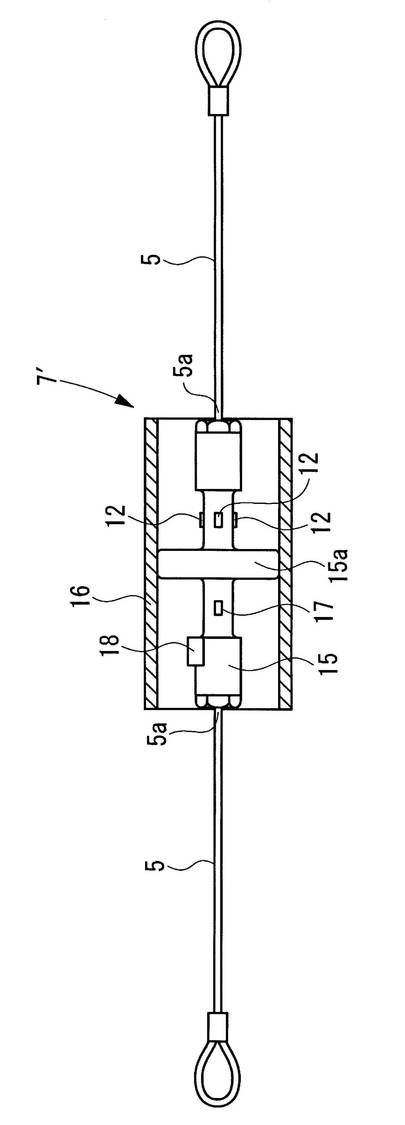
【0022】
図4は、上記支持体7の他の具体例を示す側面図である。この支持体7´は上記推進管2の内周に固定した支持管体16内に、中央にフランジ15aを有する横長の軸からなる接続体15を挿入して、上記フランジ15aを上記支持管体16の内周に摺動自在に支持させ、当該支持点で測定用ワイヤ5を分断し、これらの分断端部を上記接続体15の両端で連結し、上記支持管体16内の接続体15の、フランジ15aを挟んだ一方の側の軸の外周上下左右の4箇所に歪みゲージ12を設け、また、フランジ15aを挟んだ他方の側の軸の外周の相対向する面に2枚の引張り力検出歪みゲージ17を設け、さらに当該他方の側の軸の外周に回転角度計18を設けたものである。
【0023】
この支持体7´は、図4の左側を発進立坑3側に、右側を掘削機1側に接続し、掘進機1側の前方の推進管2が折れ曲がると測定用ワイヤ5が折れ曲がり、それに続くフランジ15aを挟んだ歪みゲージ12を有する接続体15の一側が歪み、上下左右にある歪みゲージ12の一つ又は複数の歪みゲージ12が歪む。これにより歪んだ歪みゲージ12の歪み量と歪み位置を検出し、上記フランジ15aを挟んだ接続体15の他側の引張り力検出歪みゲージ17により測定した、隣接する他の支持体7´との間の張力値を勘案して、当該接続体7´箇所の測定用ワイヤ5の折れ角度及び方向を検出する。さらに回転角度計18により当該推進管2のローリング状態を検出し、発進立坑3からの当該支持体7´間での距離により、当該距離と上記角度及び方向で推進座標を計算推測することができる。また、このように各支持体7´箇所で測定用ワイヤ5の張力値及び歪みゲージの歪み量を検出し、当該支持点箇所にコンピュータを設ければ(図示省略)、その場所で測定用ワイヤ5の折れ曲がり角度及び方向を計測することができ、従って当該コンピュータの出力用の配線のみを導出すればよい。
【0024】
図5は、この発明の位置計測に使用する実際の装置の断面図を示し、上記各推進管2内に、一回り小径の各ケーシング管20を挿入し、各ケーシング管20は外周の複数箇所に設けたガイドローラ21を各推進管20の内周面に回転自在に当接させて支持させている。そしてこれらの各ケーシング管20内に上記測定用ワイヤ5を通し、このケーシング管20内に設けた支持体7で当該測定用ワイヤ5を支持している。また、上記掘進機1は先頭の推進管2の先端に支持固定され(図示省略)、掘進機1の回転軸(図示省略)は、上記ケーシング管20内に回転自在に設けた回転ロッド22の先端に接続され、当該回転ロッド22の基端は発進立坑3内の油圧回転モータ(図示省略)に接続されている。なお、図中、22aは注水パイプ、23は上記掘進機1で掘削した土砂の排泥ホース、24は滑剤供給ホース、25は方向修正用油圧ホース、26はワイヤ式計測器データ処理部、27はワイヤ式計測器データリンクケーブル、28は傾斜計等補助計測装置である。
【0025】
なお、上記実施例では測定用ワイヤの一端を掘進機1の後部に固定しているが、これに限らず、先頭の推進管2の先端部、又は先頭のケーシング管20の先端部等、掘進機1の後部付近であれば良い。また、上記実施例では測定用ワイヤ5又は接続体15の軸の周囲又は外周の上下左右に4枚の歪みゲージ12を有するゲージプレート11又は歪みゲージ12を設けているが、上下左右のみでなく、これらの間に、歪みゲージ12を有するゲージプレート11又は歪みゲージ12を夫々入れて、合計8枚、16枚にしても良い。これらの歪みゲージ12を有するゲージプレート11又は歪みゲージ12の数は、4枚以上であれば良い。また、上記実施例では、支持体7´の引張り力検出歪みゲージ17は相対向する面に2枚設けたが、この引張り力検出歪みゲージ17は精度を上げるために4枚、6枚、8枚等、偶数の枚数のゲージを設けることもある。さらに、この引張り力検出歪みゲージに代えて、他の適宜の張力計を用いても良い。
【図面の簡単な説明】
【0026】
【図1】この発明の方法の概略構成図である。
【図2】この発明の方法に使用する支持体の一部切欠斜視図である。
【図3】この発明の方法に使用する支持体の縦断面図である。
【図4】この発明の方法に使用する支持体の他の例を示す側面図である。
【図5】この発明の方法に使用する実際の装置の断面図である。
【符号の説明】
【0027】
1 掘進機
2 推進管
3 発進立坑
4 押圧装置
5 測定用ワイヤ
6 テンション装置
7 支持体
7´ 支持体
8 スペーサ
9 フランジ
10 管体
11 ゲージプレート
12 歪みゲージ
13 円板
13a 中心孔
15 接続体
15a フランジ
16 支持管体
17 引張り力検出歪みゲージ
18 回転角度計
20 ケーシング管
21 ガイドローラ
22 回転ロッド
22a 注水ホース
23 排泥ホース
24 滑剤供給ホース
25 方向修正用油圧ホース
26 ワイヤ式計測器データ処理部
27 ワイヤ式計測器データリンクケーブル
28 傾斜計等補助計測装置
【特許請求の範囲】
【請求項1】
先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、当該測定用ワイヤを遊通させる支持体で支持し、当該支持体箇所で当該測定用ワイヤの外周周囲の少なくとも上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、当該測定用ワイヤの挙動方向により、当該測定用ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における当該測定用ワイヤの張力を勘案して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測することを特徴とする、推進工法用位置計測方法。
【請求項2】
各支持点における上記測定用ワイヤの張力は、発進立坑箇所で測定した測定用ワイヤの張力値を基にして、発進立坑から各支持点までの距離により各支持点の張力値を算出することを特徴とする、上記請求項1に記載の推進工法用位置計測方法。
【請求項3】
上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を当該推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の位置で支持させ、当該測定用ワイヤの各支持は上記推進管の内部に固定した支持体に支持し、これらの各支持体は、複数のスペーサにより一定間隔を保持したフランジを二枚相対向して設け、これらのフランジの相対向する内面に、二つの管体を相対向して設け、これらの各管体の先端は相互に一定の間隔をあけ、上記管体の外周周囲の少なくとも上下左右の四箇所に、各管体の外周から一定幅離れてゲージプレートを夫々設け、これらのゲージプレートは上記二枚のフランジの間に渡されて支持され、これらのゲージプレートの各外面に歪みゲージを設け、上記二つの管体の先端の間隙に、中心孔を有する円板が挿入され、当該円板は、上記少なくとも上下左右の4枚のゲージプレートに囲まれているが、当該円板の外周と各ゲージプレートの内面との間に隙間を有し、上記測定用ワイヤはこの支持体の上記一方のフランジに開口部を有する一方の管体から挿入され、上記円板の中心孔を通り、他方の管体を通って他方のフランジの開口部から外方に抜けており、当該測定用ワイヤは、上記円板の中心孔及び上記管体内で長手方向に摺動自在であり、当該長手方向に直角な面方向に対しては上記円板の外周が四方のゲージプレートのいずれかの内面に当たるまで、移動自在となっており、また、上記支持体に回転角度計を設け、上記測定用ワイヤの挙動方向により、上記円板が上記ゲージプレートの一つ又は複数を押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して当該測定用ワイヤの折れ角度を計測し、かつ上記回転角度計で検知した推進管の鉛直軸の傾き状態を勘案して上記荷重がかかった歪みゲージの位置から上記測定用ワイヤの折れ方向を計測し、発進立坑から各支持点までの距離から、上記掘進機及び複数の推進管の位置を計測することを特徴とする、上記請求項1、又は2に記載の方法に使用する推進工法用位置計測装置。
【請求項4】
先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを上記発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、上記推進管の内部に固定した支持体内のフランジを有する横長の軸からなる接続体に支持させ、当該測定用ワイヤを当該各支持体箇所で分断し、これらの分断端部を当該接続体の両端で連結し、上記支持体内の接続体のフランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、上記測定用ワイヤの挙動方向により、当該測定用ワイヤが上記歪みゲージを押圧して荷重をかけ、当該荷重がかかった歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点で上記測定用ワイヤの張力を測定して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測することを特徴とする、推進工法用位置計測方法。
【請求項5】
各支持点における上記測定用ワイヤの張力は、各支持点において張力計により各支持点の間の上記測定用ワイヤの張力を測定することを特徴とする、上記請求項4に記載の推進工法用位置計測方法。
【請求項6】
上記測定用ワイヤの各支持が、上記推進管の内部に固定した支持体内に、中央にフランジを有する横長の軸からなる接続体を挿入して、上記フランジで上記支持体の内周に支持させ、当該支持点で測定用ワイヤを分断し、これらの分断端部を上記接続体の両端で連結し、上記支持体内の接続体の、フランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、また、フランジを挟んだ他方の側の軸の外周に少なくとも2個以上の張力計、及び回転角度計をそれぞれ設けて支持したことを特徴とする、請求項4又は5に記載の推進工法用位置計測装置。
【請求項7】
上記推進工法に使用する管路が小口径であり、急曲線の推進工法であることを特徴とする、請求項1、2、4及び5のいずれかに記載の推進工法用位置計測方法。
【請求項1】
先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、当該測定用ワイヤを遊通させる支持体で支持し、当該支持体箇所で当該測定用ワイヤの外周周囲の少なくとも上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、当該測定用ワイヤの挙動方向により、当該測定用ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における当該測定用ワイヤの張力を勘案して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測することを特徴とする、推進工法用位置計測方法。
【請求項2】
各支持点における上記測定用ワイヤの張力は、発進立坑箇所で測定した測定用ワイヤの張力値を基にして、発進立坑から各支持点までの距離により各支持点の張力値を算出することを特徴とする、上記請求項1に記載の推進工法用位置計測方法。
【請求項3】
上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を当該推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを発進立坑からの所定距離の推進管内の位置で支持させ、当該測定用ワイヤの各支持は上記推進管の内部に固定した支持体に支持し、これらの各支持体は、複数のスペーサにより一定間隔を保持したフランジを二枚相対向して設け、これらのフランジの相対向する内面に、二つの管体を相対向して設け、これらの各管体の先端は相互に一定の間隔をあけ、上記管体の外周周囲の少なくとも上下左右の四箇所に、各管体の外周から一定幅離れてゲージプレートを夫々設け、これらのゲージプレートは上記二枚のフランジの間に渡されて支持され、これらのゲージプレートの各外面に歪みゲージを設け、上記二つの管体の先端の間隙に、中心孔を有する円板が挿入され、当該円板は、上記少なくとも上下左右の4枚のゲージプレートに囲まれているが、当該円板の外周と各ゲージプレートの内面との間に隙間を有し、上記測定用ワイヤはこの支持体の上記一方のフランジに開口部を有する一方の管体から挿入され、上記円板の中心孔を通り、他方の管体を通って他方のフランジの開口部から外方に抜けており、当該測定用ワイヤは、上記円板の中心孔及び上記管体内で長手方向に摺動自在であり、当該長手方向に直角な面方向に対しては上記円板の外周が四方のゲージプレートのいずれかの内面に当たるまで、移動自在となっており、また、上記支持体に回転角度計を設け、上記測定用ワイヤの挙動方向により、上記円板が上記ゲージプレートの一つ又は複数を押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点における上記測定用ワイヤの張力を勘案して当該測定用ワイヤの折れ角度を計測し、かつ上記回転角度計で検知した推進管の鉛直軸の傾き状態を勘案して上記荷重がかかった歪みゲージの位置から上記測定用ワイヤの折れ方向を計測し、発進立坑から各支持点までの距離から、上記掘進機及び複数の推進管の位置を計測することを特徴とする、上記請求項1、又は2に記載の方法に使用する推進工法用位置計測装置。
【請求項4】
先端の掘進機で地中を掘削しながら当該掘進機の後方に推進管を次々と連結して同推進管の最後尾を発進立坑で押圧し、発進立坑から目標位置まで直進又は湾曲して推進する工法において、上記掘進機の後部付近に一端を固定し、他端を当該掘進機に連結した複数の推進管の中を各推進管に沿って通して発進立坑内でテンション装置により張力をかけた測定用ワイヤを設け、当該測定用ワイヤを上記発進立坑からの所定距離の推進管内の複数の位置で支持させ、当該測定用ワイヤの各支持は、上記推進管の内部に固定した支持体内のフランジを有する横長の軸からなる接続体に支持させ、当該測定用ワイヤを当該各支持体箇所で分断し、これらの分断端部を当該接続体の両端で連結し、上記支持体内の接続体のフランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、上記測定用ワイヤの挙動方向により、当該測定用ワイヤが上記歪みゲージを押圧して荷重をかけ、当該荷重がかかった歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点で上記測定用ワイヤの張力を測定して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測することを特徴とする、推進工法用位置計測方法。
【請求項5】
各支持点における上記測定用ワイヤの張力は、各支持点において張力計により各支持点の間の上記測定用ワイヤの張力を測定することを特徴とする、上記請求項4に記載の推進工法用位置計測方法。
【請求項6】
上記測定用ワイヤの各支持が、上記推進管の内部に固定した支持体内に、中央にフランジを有する横長の軸からなる接続体を挿入して、上記フランジで上記支持体の内周に支持させ、当該支持点で測定用ワイヤを分断し、これらの分断端部を上記接続体の両端で連結し、上記支持体内の接続体の、フランジを挟んだ一方の側の軸の外周の少なくとも上下左右の4箇所に歪みゲージを設け、また、フランジを挟んだ他方の側の軸の外周に少なくとも2個以上の張力計、及び回転角度計をそれぞれ設けて支持したことを特徴とする、請求項4又は5に記載の推進工法用位置計測装置。
【請求項7】
上記推進工法に使用する管路が小口径であり、急曲線の推進工法であることを特徴とする、請求項1、2、4及び5のいずれかに記載の推進工法用位置計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−231635(P2007−231635A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−55415(P2006−55415)
【出願日】平成18年3月1日(2006.3.1)
【出願人】(000003687)東京電力株式会社 (2,580)
【出願人】(000141060)株式会社関電工 (115)
【出願人】(593188420)露崎工業株式会社 (1)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年3月1日(2006.3.1)
【出願人】(000003687)東京電力株式会社 (2,580)
【出願人】(000141060)株式会社関電工 (115)
【出願人】(593188420)露崎工業株式会社 (1)
【Fターム(参考)】
[ Back to top ]