
推進補助装置、駆動力供給方法
【課題】内視鏡を前進時と後退時とで操作性を同じにする。
【解決手段】第1モータ31aの回転力は第1トルクワイヤ30aを介して駆動筒24に伝達され、第2モータ31bの回転力は第2トルクワイヤ30bを介して駆動筒24に伝達される。第1モータ31aがB方向、第2モータ31bがA方向に回転すると、駆動筒24がA方向に回転して内視鏡が前進する。他方、第1モータ31aがA方向、第2モータ31bがB方向に回転すると、駆動筒24がB方向に回転して内視鏡が後退する。第1、第2トルクワイヤ30a、30bは、それぞれ複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されるとともに、第1トルクワイヤ30aは、内視鏡を前進させる際に巻き締まるように形成され、第2トルクワイヤ30bは、内視鏡を後退させる際に巻き締まるように形成されている。
【解決手段】第1モータ31aの回転力は第1トルクワイヤ30aを介して駆動筒24に伝達され、第2モータ31bの回転力は第2トルクワイヤ30bを介して駆動筒24に伝達される。第1モータ31aがB方向、第2モータ31bがA方向に回転すると、駆動筒24がA方向に回転して内視鏡が前進する。他方、第1モータ31aがA方向、第2モータ31bがB方向に回転すると、駆動筒24がB方向に回転して内視鏡が後退する。第1、第2トルクワイヤ30a、30bは、それぞれ複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されるとともに、第1トルクワイヤ30aは、内視鏡を前進させる際に巻き締まるように形成され、第2トルクワイヤ30bは、内視鏡を後退させる際に巻き締まるように形成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内視鏡の先端に装着され、内視鏡を前進及び後進させる推進補助装置、及び、推進補助装置に対して駆動力を供給する駆動力供給方法に関するものである。
【背景技術】
【0002】
医療分野において内視鏡を利用した診断が行われている。内視鏡は、CCD等の撮像素子を内蔵した挿入部が被検体内に挿入される。この撮像素子により得られた画像はモニタに表示され、このモニタに表示された画像により被検体内を観察する。
【0003】
また、近年では、大腸のように曲がりくねった部位に対しても内視鏡を容易に挿脱できるように、回転体を回転駆動することによって内視鏡の挿入を補助する推進補助装置が提案されている(下記特許文献1、2参照)。このような推進補助装置は、回転体に駆動力を供給するためのフレキシブルなワイヤ(トルクワイヤ)を備え、トルクワイヤを一方向に回転させると内視鏡が前進し、トルクワイヤを反対方向に回転させると内視鏡が後退するように構成されている。なお、トルクワイヤとしては、複数の繊維状のエレメントを螺旋状に縒り合わせたものが用いられている(下記特許文献2、3参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2009−513250
【特許文献2】特開2005−253892
【特許文献3】特開2001−079007
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、トルクワイヤは、複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されているので、巻き締める方向と巻き緩める方向とでは巻き緩める方向の方がねじり剛性が低くトルクワイヤをねじってもこの力が他端に伝達され難い。このため、従来のように、1本のトルクワイヤを巻き締める方向と巻き緩める方向とに回転させることによって内視鏡を進退させる進退補助装置では、トルクワイヤを巻き締める方向と巻き緩める方向とに同じように回転させても、内視鏡は同じようには進退しない、すなわち、内視鏡を前進させるときと後退させるときとで操作性が異なってしまうといった問題があった。
【0006】
本発明は上記問題を解決するためのものであり、内視鏡を前進させるときと後退させるときとで操作性が異なることのない推進補助装置、及び、駆動力供給方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の推進補助装置は、内視鏡の先端部に装着される装着部と、装着部に回転自在に支持された回転体と、後端部がモータに接続され、先端部が前記回転体を回転駆動する駆動機構に接続され、前記モータの回転力を前記駆動機構に伝達して前記回転体を回転させるトルクワイヤとを備え、前記回転体を回転させて内視鏡を進退させる推進補助装置において、前記トルクワイヤは、第1、第2の2種類のトルクワイヤからなり、前記第1、第2トルクワイヤの双方を回転させることによって、前記回転体が回転して内視鏡が進退するとともに、前記第1トルクワイヤは、内視鏡を前進させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成され、前記第2トルクワイヤは、内視鏡を後退させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されていることを特徴としている。
【0008】
前記第1トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第1トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転し、前記第2トルクワイヤを前記第2方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第2トルクワイヤを前記第1方向に回転させることによって内視鏡を後端させる方向に前記回転体が回転するものでもよい。
【0009】
前記第1、第2トルクワイヤは、互いに同じ方向に捻るように前記エレメントを縒り合わせることによって形成されるものでもよい。
【0010】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、前記第2トルクワイヤの先端に前記第1ギヤと歯合する第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤ及び前記第1ギヤを介して前記駆動機構に伝達されるものでもよい。
【0011】
前記第1、第2トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第1、第2トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転するものでもよい。
【0012】
前記第1、第2トルクワイヤは、互いに反対方向に捻るように前記エレメントを縒り合わせることによって形成されるものでもよい。
【0013】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、前記第2トルクワイヤの先端に前記駆動機構に連結された第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤを介して前記駆動機構に伝達されるものでもよい。
【0014】
内視鏡を前進させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性と、内視鏡と後退させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性とがほぼ等しくなるように、前記第1、第2トルクワイヤが形成されていることが好ましい。
【0015】
前記第1、第2トルクワイヤをそれぞれ1本ずつ設けてもよい。
【0016】
また、上記目的を達成するため、本発明の駆動力供給方法は、内視鏡の先端部に装着されて回転体を回転させることで内視鏡を進退させる推進補助装置に対し、複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されたトルクワイヤによって駆動力を供給する駆動力供給方法において、前記トルクワイヤとして、第1、第2の2種類のトルクワイヤを用い、前記第1トルクワイヤを巻き締める方向に回転させるとともに、前記第2トルクワイヤを巻き緩める方向に回転させることによって内視鏡を前進させるための駆動力を供給し、前記第2トルクワイヤを巻き締める方向に回転させるとともに、前記第1トルクワイヤを巻き緩める方向に回転させることによって内視鏡を後退させるための駆動力を供給することを特徴としている。
【発明の効果】
【0017】
本発明では、第1、第2の2種類のトルクワイヤによって回転体を回転させるとともに、内視鏡を前進させるときは、第1トルクワイヤが巻き締まって第2トルクワイヤが巻き緩み、内視鏡を後退させるときは、第1トルクワイヤが巻き緩んで第2トルクワイヤが巻き締まるようにした。これにより、内視鏡を前進させるときと後退させるときとで第1、第2のトルクワイヤの合計のねじり剛性がほぼ等しくなり、操作性が異なることがない。
【図面の簡単な説明】
【0018】
【図1】推進補助装置を装着した内視鏡を示す説明図である。
【図2】メンブレンを展開した状態の推進補助装置の斜視図である。
【図3】メンブレンを展開した状態の推進補助装置の分解図である。
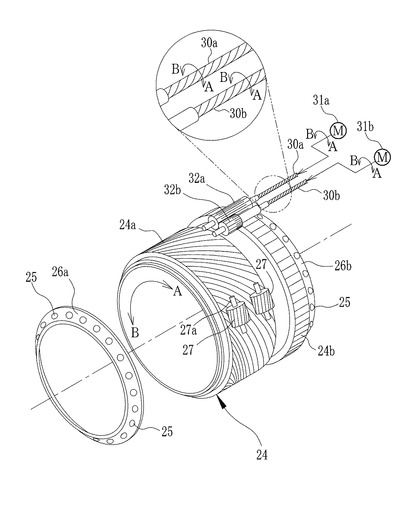
【図4】駆動筒を回転させる機構の説明図である。
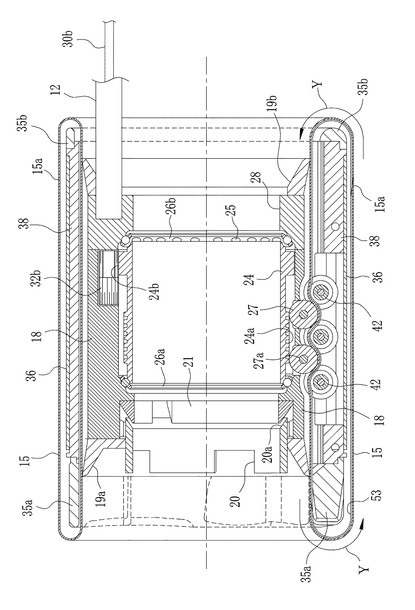
【図5】推進補助装置の断面図である。
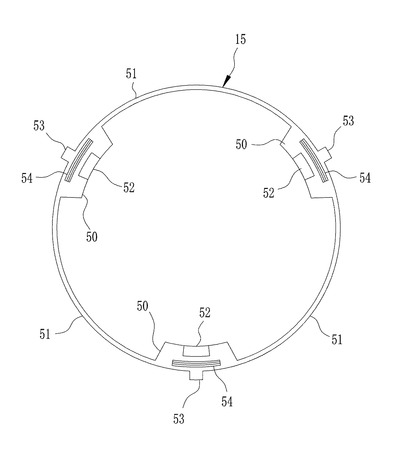
【図6】メンブレンの断面図である。
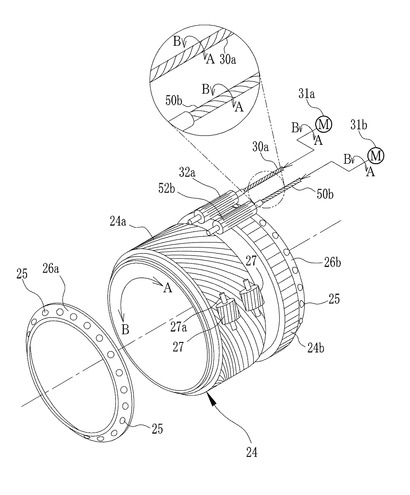
【図7】駆動筒を回転させる機構の説明図である。
【発明を実施するための形態】
【0019】
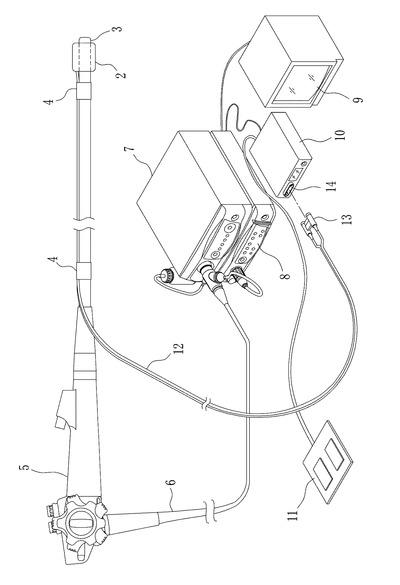
図1に示すように、推進補助装置2は内視鏡の先端硬性部3に固定して使用される。先端硬性部3には、例えば撮像光学系とともにCMOS型あるいはCCD型のイメージセンサが組み込まれ、先端硬性部3に設けられた照明窓からの照明光のもとで胃壁や腸壁の画像を撮像する。先端硬性部3を所期の位置まで挿入操作することができるように先端硬性部3の基端側には湾曲部が設けられ、また挿入操作を補助するために推進補助装置2が併用される。湾曲部は、操作部5に備えられたアングルノブの操作により挿入しやすいように屈曲動作させることができる。
【0020】
操作部5には、さらに、吸・排気/吸・排水の切替え操作を行うための操作ボタン、生検鉗子などが挿入される鉗子チャンネルの口金などが設けられている。操作部5からは接続コード6が引き出され、光源装置7と内視鏡プロセッサ8に接続されている。光源装置7に組み込まれた照明ランプからの光は、接続コード6内及び内視鏡内部に組み込まれたライトガイドファイバを通して照明窓まで導光される。内視鏡プロセッサ8は、接続コード6から入力される画像信号に適宜の信号処理を行い、得られた画像は表示モニタ9に表示される。なお、内視鏡プロセッサ8は、接続コード6を経由して供給される内視鏡からの入力情報に基づき、現在接続されている内視鏡の機種情報を識別することができる。そして、内視鏡が操作されるときに機種ごとに異なった制御が必要である場合、あるいは機種ごとに表示モニタ9上で異なった画像表示が必要である場合などには、機種情報に対応した適切な制御あるいは表示に自動切り替えすることが可能となる。
【0021】
内視鏡プロセッサ8にはコントローラ10が電気的に接続される。コントローラ10は推進補助装置2の作動を監視・制御するために用いられる。推進補助装置2の後端から並列二連となった柔軟なシース12が引き出されている。シース12はサージカルテープ4などにより内視鏡の挿入部に適宜に固定され、推進補助装置2を装着した内視鏡を体腔内に挿入しあるいは操作する際にシース12が体腔内で不用意な挙動をすることはない。
【0022】
ダブルルーメン型のシース12内には、推進補助装置2の内部機構に先端部が機械的に連結された第1、第2の2種類のトルクワイヤ30a、30b(図4参照)がそれぞれ挿通されている。第1、第2トルクワイヤ30a、30bは可撓性を有しながらもねじり剛性が高く、一端側から入力されたトルクをほとんど減衰させることなく他端側に伝達する。これら第1、第2トルクワイヤ30a、30bの後端は二股のプラグ13を介してコントローラ10のコネクタ14に連結される。コントローラ10には一対の第1、第2モータ31a、31b(図4参照)が組み込まれ、プラグ13をコネクタ14に連結すると、第1トルクワイヤ30aは第1モータ31aにより駆動できる状態になり、第2トルクワイヤ30bは第2モータ31bにより駆動できる状態になる。
【0023】
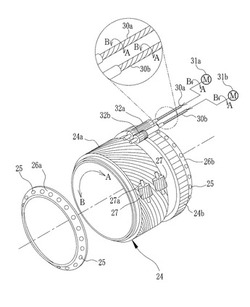
大腸用の内視鏡の場合、特にS状結腸や横行結腸における挿入操作や引き出し操作を楽にする目的で、推進補助装置2が効果的に用いられる。推進補助装置2は略円柱形状を有し、外表面がトロイド状の循環移動体となる柔軟かつ強靱な合成樹脂製のシート材からなるメンブレン15で覆われている。図2及び図3では、構造を分かりやすくするためにメンブレン15を筒状に展開して表しているが、メンブレン15はその最終的な組み込み形態では、図示の内周面が外周面となるように反転させた状態で前端と後端とが互いに接合され、トロイド状の袋体(図5参照)となる。なお、図2〜図5は、図中左方が先端硬性部3を突出させる先端側、図中右方が内視鏡の操作部5に近い基端側になるように表されている。
【0024】
図2及び図3に示すように、推進補助装置2は、筒状に展開したメンブレン15の内側の構造体となるインナーユニット16と、メンブレン15の外側の構造体となるアウターユニット17とを備えている。インナーユニット16は、内周側に円筒状の中空部を有し、外周面側が三角筒形状に整形されたキャリア筒18と、キャリア筒18の後端側にビス止め、圧入、カシメ等で係止止めされる略三角筒状のキャップ28と、キャリア筒18の先端側、キャップ28の後端側にそれぞれ固定されるフロントワイパー19a,リアワイパー19bと、キャリア筒18の前端側内周に形成されたネジに螺合して回転により軸方向に移動するクランパ20と、クランパ20の軸方向への移動に応じて内・外径が拡大/縮小する合成樹脂製のCリング21と、キャリア筒18の内周に回転自在に支持された円筒状の駆動筒24(図4参照)を有している。
【0025】
図4に示すように、駆動筒24はその両端がベアリングボール25を円環状に並べて保持した軸受リング26a,26bを介してキャリア筒18の内周側に回転自在に支持され、キャリア筒18の後端に固定されたキャップ28により抜け止めされる。駆動筒24の外周面にはウォームギヤ部24aと平ギヤ部24bとが設けられている。ウォームギヤ部24aには、キャリア筒18に回転自在に保持された一対のヘリカルギヤ27、27がキャリア筒18の開口を通して噛み合わされる。この一対のヘリカルギヤ27,27は、駆動筒24の回転中心軸に関して120度の回転対称となる3個所にそれぞれ組み付けられ、駆動筒24が回転するとこれらのヘリカルギヤ27,27はそれぞれの軸27aを中心に一斉に同方向に回転する。
【0026】
シース12の先端は、キャップ28の後端側から形成された凹部内に接着または熱溶着などによって固着される。そしてシース12の先端から突出した第1、第2トルクワイヤ30a,30bの先端部は、キャップ28に形成された貫通孔を通ってキャップ28の前方に突出し、その各々にピニオン32a,ピニオン32bが固着される。図示のように、ピニオン32a,ピニオン32bの各々の先端から回転中心となる軸が突出し、これらの軸がキャリア筒に設けられた穴に挿通されることによってピニオン32a,ピニオン32bの各々が回転自在に支持される。これらのピニオン32a,32bのうち、駆動筒24の平ギヤ部24bには第1トルクワイヤ30aに固着されたピニオン32aが噛み合う。他方の第2トルクワイヤ30bに連結されたピニオン32bはピニオン32aに噛み合い、平ギヤ部24bには噛み合わされない。したがって、駆動筒24は第1トルクワイヤ30aに連結されたピニオン32aの回転によって駆動される。しかし、第1、第2トルクワイヤ30a,30bの各々は、第1、第2モータ31a、31bから個別に供給される回転力で駆動され、ピニオン32bはピニオン32aとは逆向きに回転される。このためピニオン32aには第2トルクワイヤ30bからの回転力も加算され、駆動筒24を高いトルクで回転させることができる。
【0027】
第1、第2トルクワイヤ30a、30bは、複数の繊維状のエレメント(本実施形態ではエレメントとして鋼線を用いた)を螺旋状に縒り合わせることによって形成されている。そして、第1トルクワイヤ30aは、第1モータ31aが図4のB方向に回転したときに巻き締まり、駆動筒24を図4のA方向(先端硬性部3を前進させる方向)に回転させる。他方、第2トルクワイヤ30bは、第2モータ31bが図4のB方向に回転したときに巻き締まり、駆動筒24を図4のB方向(先端硬性部3を後退させる方向)に回転させる。このように、本発明では、駆動筒24を回転させるときに第1、第2トルクワイヤ30a、30bの一方が巻き締まり、他方が巻き緩むように構成されている。
【0028】
一般に、トルクワイヤは、巻き締める方向のねじり剛性が巻き緩める方向のねじり剛性よりも高い。このため、1本のトルクワイヤを巻き締める方向と巻き緩める方向とに回転させることによって駆動筒24を回転させる場合、駆動筒24をA方向に回転させるときとB方向に回転させるときとで、トルクワイヤのねじり剛性が異なってしまう。これに対して、本発明では、第1、第2の2本のトルクワイヤ30a、30bを用い、一方を巻き締める方向に回転させ、他方を巻き緩む方向に回転させることによって駆動筒24を回転させているので、駆動筒24の回転方向によらず第1、第2トルクワイヤ30a、30bの合計のねじり剛性がほぼ等しくなっている。
【0029】
フロントワイパー19a及びリアワイパー19bのそれぞれは、先端側に庇状に広がったスリーブ部を有し、これらのスリーブ部の先端はメンブレン15が循環移動するときに内周側の面に摺接する。そして、メンブレン15の内周側の面に付着した異物や消化管内壁がメンブレン15の移動とともに推進補助装置2の中に引き込まれることを防ぐ。
【0030】
クランパ20の前端には、規則的な凹凸係合部が周方向に整列して設けられ、専用の治具を先端側から挿入してクランパ20に係合させることができる。治具の回転操作でクランパ20をねじ込み方向に回転させてゆくと、クランパ20が後端側に移動し、後端のテーパ面20a(図5参照)の押圧を受けてCリング21が縮径するように変形する。したがって、キャリア筒18の円筒状の中空部に内視鏡の先端硬性部3を挿入した後、クランパ20のねじ込み操作を行ってゆくとCリング21の内周面が先端硬性部3の外周面に強く押し付けられ、キャリア筒18を先端硬性部3に固定することができる。
【0031】
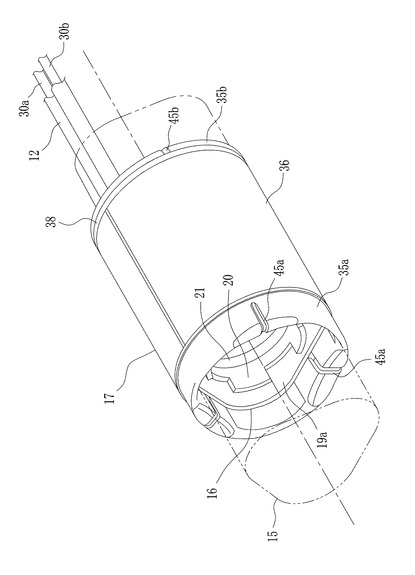
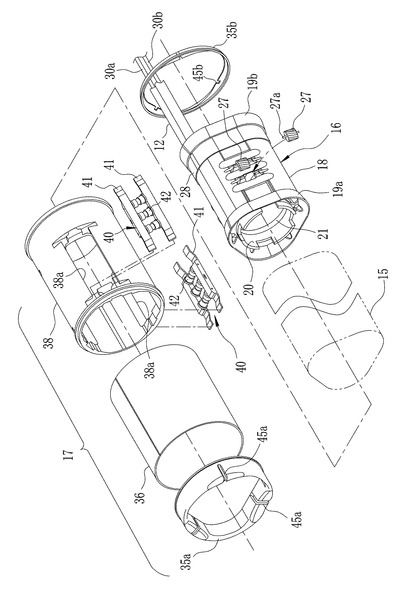
メンブレン15の外側の構造体となるアウターユニット17は、先端側から順に、フロントバンパー35aと、シールドカバー36と、円筒状のローラ保持筒38と、リアバンパー35bとを有する。このアウターユニット17は、以下の手順にしたがってインナーユニット16及びメンブレン15と一体的に連結した状態に組み立てられる。
【0032】
図2及び図3に示すように、各種部品を組み込んだインナーユニット16の外表面が覆われるように筒状に展開したメンブレン15の中にインナーユニット16を入れた後、ローラ保持筒38の中空部内に、メンブレン15を被せた状態のインナーユニット16を挿入する。ローラ保持筒38には、その中心軸に関して120度の回転対称となる3個所に軸方向に長い略矩形の開口38aが形成されている。この開口38aにはローラアセンブリ40が組み付けられる。
【0033】
ローラアセンブリ40は、一対の細長いフレーム41の間に3本のローラ42を整列保持させたものである。フレーム41は弾性力に富む金属薄板製で、各々の両端を開口38aの前・後端に形成された係合部に嵌め込んでこれらをローラ保持筒38に固定すると、フレーム41の長手方向中央部が開口38aを通してローラ保持筒38の中空部内に入り込むように湾曲する。こうしてフレーム41が湾曲することによって、フレーム41で保持された3本のローラ42はメンブレン15をヘリカルギヤ27に向かって押し付ける。この結果、図5に示すように、メンブレン15が一対のヘリカルギヤ27と3本のローラ42との間に強く挟持される。ここで、3本のうちの中央のローラ42は、その支軸がフレーム41の長手方向に延びた長孔で支持されているためフレーム41の長手方向での位置に関して自由度をもつ。したがって、両側の2本のローラとの相対位置に関しては、一対のヘリカルギヤ27との間にメンブレン15を最もバランスよく挟持できる位置に自動調整される。
【0034】
こうして3個所の開口38aを覆うように、ローラ保持筒38にローラアセンブリ40が組み付けられると、各ローラ42がローラ保持筒38の内側に突出するためインナーユニット16に対してローラ保持筒38は軸方向に移動できなくなり、これらはメンブレン15を挟んだ状態で一体的に組み合わされる。そして、ローラ保持筒38の先端にフロントバンパー35a、後端にリアパンパー35bが固定される。フロントパンパー35aの先端部及びリアパンパー35bの後端部には、ローラアセンブリ40と軸方向に並ぶように外周の三個所にそれぞれ溝45a,45bが設けられている。さらに、ローラアセンブリ40を含めてローラ保持筒38の外表面を緊密に覆うようにシールドカバー36が被せられる。
【0035】
インナーユニット16とアウターユニット17との間に筒状に展開されたメンブレン15を挟み、これらを一体的に組み合わせた後に、メンブレン15の前端と後端とをそれぞれ逆向きに反転させて裏返しにしてから接合する。このとき、それぞれの接合面に傾斜をつけておけば、接合部15aに極端な厚みムラが生じることがない。図5は組み立て後の推進補助装置2の断面を模式的に示している。このようにトロイド状に接合することによって、メンブレン15はアウターユニット17を全体的に包み込むような内部空間を備える。この内部空間にはエアー、生理食塩水、コロイド状の合成樹脂材料、オイルやグリスなどの潤滑材等、適宜のものを封入することも可能である。
【0036】
図6に円筒状にしたメンブレン15の断面構造の一例を示す。メンブレン15は、例えばウレタン樹脂などのシート材を積層した構造を有し、内周側には円周を三等分する位置に断面が台形状の隆起部50が形成されている。この隆起部50は、他の薄肉部51よりもシート材の積層数を多くすることによって厚くした部分で、メンブレン15の軸方向全長にわたって形成されている。隆起部50の内周面にはヘリカルギヤ27と噛み合うように斜めに傾斜した歯を並べたギヤ列52が設けられている。また、メンブレン15の外周面には隆起部50の位置に対応して軸方向に延びたリブ53が設けられ、さらにギヤ列52とリブ53との間にはメッシュ状の繊維シート54が積層されている。
【0037】
メンブレン15は、図5に示すようにトロイド状にして用いられる。このとき、軸方向に延びた三列の隆起部50がそれぞれヘリカルギヤ27とローラ42との間に挟持され、しかもギヤ列52にヘリカルギヤ27が噛み合わされる。そしてヘリカルギヤ27の回転がギヤ列52を介して直接的にメンブレン15に伝達され、メンブレン15を軸方向に効率的に移動させることができる。隆起部50はシート材の多層構造からなり、しかもメッシュ状の繊維シート54も積層されているから、ヘリカルギヤ27から直接的に駆動力を受けてもギヤ列52が延び変形したりメンブレン15が破断したりすることはなく、十分な機械的強度を確保することができる。また、隆起部50以外は薄肉部51にしてあるから、メンブレン15がインナーユニット16とアウターユニット17との間を通過するときの抵抗を減らすことができる。
【0038】
さらに、隆起部50の内面側に設けられたリブ53は、メンブレン15の移動とともにローラ42の中央部分に形成された溝に係合する。また、アウターユニット17がメンブレン15で緊密に包み込まれるようにトロイド形状の内部空間を縮小調節する場合には、リブ53はフロントバンパー35a及びリアバンパー35bの溝45a,45bにも係合するようになる。このようにリブ53を利用することによって、メンブレン15を軸方向に移動させるときの蛇行を防ぎ、移動経路を安定に保つことができる。
【0039】
以下、上記構成による本発明の作用について説明する。図1に示すように、推進補助装置2は、先端硬性部3の先端を部分的に突出させた状態で内視鏡に固定される。この固定に際しては専用の治具が用いられ、クランパ20が時計方向に回転される。クランパ20はキャリア筒18の先端側内周に形成された右ネジに螺合しているから、時計方向への回転により奥側(後端側)へと移動してテーパ面20aでCリング21を押圧する。Cリング21の前面には外周側ほど後端側に傾斜した斜面が形成され、この斜面がクランパ20のテーパ面20aによって押圧されることにより、Cリング21は直径が狭まるように弾性変形する。こうしてCリング21が変形すると、キャリア筒18の中空部に挿入されている内視鏡の先端硬性部3がCリング21で締めつけられ、推進補助装置2は先端硬性部3の外周面に緊密に固定される。
【0040】
推進補助装置2の後端から引き出されたシース12を内視鏡の湾曲部から軟性部の表面に沿わせるように引き延ばす。シース12の表面には適切な間隔でテープ止め位置を表す表示が設けられている。この表示に合わせてサージカルテープ4などを利用してシース12を内視鏡の湾曲部や軟性部に固定する。そして、シース後端のプラグ13をコネクタ14に挿入してコントローラ10に接続し、コントローラ10の電源をオンする。コントローラ10は、電源がオンされたときにコネクタ14にプラグ13が接続されているか否かを電気的にチェックし、未接続あるいは適正に接続されていないときには音あるいは警告灯などの点滅により報知する。接続が適正であるときには、コネクタ14に組み込まれたセンサーがプラグ13のブリッジ部分に設けられている信号部から推進補助装置2の機種情報を読み取る。そしてコントローラ10は、読み取った機種情報に応じて第1、第2トルクワイヤ30a、30bの回転速度やトルクリミッタの値を自動設定し、第1、第2トルクワイヤ30a,30bが過大な速度やトルクで回転されることを防止する。
【0041】
また、コントローラ10は、電源がオンされたときに、内視鏡プロセッサ8に接続されている内視鏡の機種情報を内視鏡プロセッサ8からの電気信号として受け取る。コントローラ10は、現在使用されている内視鏡の機種情報と、推進補助装置2の機種情報とをコントローラ10の内部記憶手段で保有しているテーブル情報で照合する。テーブル情報には、内視鏡の機種ごとに適用可能な推進補助装置2の機種を対応づけた照合データが格納されている。そして、例えば推進補助装置2の機種情報からCリング21の拡縮範囲が特定され、また内視鏡の機種情報から内視鏡の先端硬性部3の外径が特定されれば、その推進補助装置2がその内視鏡の先端硬性部3に適正に装着して使用できるか否かは即座に判定することができる。したがって、もし不適切な組み合わせであると判定されたときには、警告音や警告灯の点滅などにより報知を行い、あるいは同時に推進補助装置2の作動を禁止するなどの手段を講じることによって、思わぬ事故の発生を防ぐことができる。
【0042】
コントローラ10に接続されたフットスイッチ11を操作すると、コントローラ10内で一対の第1、第2モータ31a、31bが回転して第1、第2トルクワイヤ30a,30bには回転力が加えられる。この回転力はそれぞれピニオン32a,32bに伝えられ、ピニオン32aに噛み合っている平ギヤ部24bを介して駆動筒24を回転させる。ピニオン32bはピニオン32aとは逆方向に回転され、その回転はピニオン32aにそのまま伝達されるようにしている。したがって、コントローラ10内の一対の第1、第2モータ31a、31bの双方を利用して駆動筒24を回転させることができる。
【0043】
駆動筒24を回転させるときは、第1、第2の2本のトルクワイヤ30a、30bを用いるとともに、第1、第2トルクワイヤ30a、30bの一方を巻き締める方向に回転させ他方を巻き緩む方向に回転させるので、駆動筒24をA方向及びB方向のいずれに回転させる場合であっても第1、第2トルクワイヤ30a、30bの合計のねじり剛性がほぼ等しい。これにより、例えば、駆動筒24をA方向に回転させるときはフットスイッチ11の操作に対して敏感に反応し、駆動筒24をB方向に回転させるときはフットスイッチ11の操作に対して反応が鈍感になるなどの問題が生じることなく、フットスイッチ11の操作態様と駆動筒24の回転態様とが一致するので、違和感なく駆動筒24を回転できる。
【0044】
駆動筒24の回転とともにウォームギヤ部24aが回転すると、ヘリカルギヤ27がそれぞれの軸27aを中心に一斉に同じ方向に回転する。ヘリカルギヤ27の歯面と、ローラアセンブリ40の各ローラ42との間にはメンブレン15が強く挟持されているから、ヘリカルギヤ27の回転とともにローラ42が従動して両者で挟持されたメンブレン15は駆動筒24の軸方向に移動する。例えば図5においてヘリカルギヤ27が時計方向に回転するとローラ42は反時計方向に回転し、これらに挟持されているメンブレン15は、内周側(アウターユニット17の内側)では後端側から先端側へと移動するように送られ、メンブレン15の外周側(アウターユニット17の外側)ではメンブレン15は先端側から後端側へと送られる。すなわち図中に矢線Yで示すように、トロイド状のメンブレン15はその全周で先端では内周側から外周側へと順次に送り出され、後端では外周側から内周側へと順次に繰り込まれるように循環移動する。
【0045】
内視鏡が推進補助装置2とともに大腸に挿入され、メンブレン15の外周側の面が腸壁に接触した状態になっていると、メンブレン15が上記循環移動を行っている間は、内視鏡の先端硬性部3を前進させる方向への推進力が得られ、あるいは大腸壁を手前側にたぐり寄せる作用力を得ることができる。反対にメンブレン15が逆方向に循環移動を行っている間は、内視鏡の先端硬性部3を後退させる方向への推進力が得られ、あるいは大腸壁を奥側にたぐり寄せる作用力を得ることができる。前述のように、メンブレン15は駆動筒24の回転によって循環駆動され、この駆動筒24の回転はフットスイッチ11により制御できる。そして、フットスイッチ11の操作態様と駆動筒24の回転態様は、駆動筒24の回転方向によらず一致しているので、違和感なく駆動筒24を回転、すなわち、違和感なく内視鏡を進退できる。
【0046】
また、内視鏡を前進させているときには、メンブレン15の外周側に付着した異物などはアウターユニット17の後端側から内周側に移動してくるが、その直前でリアワイパー19bの後端側に延びたスリーブ部の先端がメンブレン15と摺接して異物が引き込まれることを阻止する。もちろん、メンブレン15の移動とともに生体組織の一部が巻き込まれることも防止することができる。なお、内視鏡を後退させているときには、フロントワイパー19aのスリーブ部の先端が同等の作用を果たすことになる。
【0047】
推進補助装置2を先端硬性部から取り外すときには、治具を利用してクランパ20を反時計方向に回転させる。これによりクランパ20は回転しながら手前に移動し、Cリング21への押圧を解除する。この結果、自身の弾性によってCリング21が拡径して内周面が先端硬性部3の外周面から離れるから、推進補助装置2は内視鏡から簡単に取り外すことができるようになる。
【0048】
なお、本発明は、第1、第2の2種類のトルクワイヤを用いて内視鏡に推進力を供給するとともに、推進力を供給するときに、第1、第2の一方のトルクワイヤが巻き締まり、他方が巻き緩むように構成することによって、内視鏡を前進させるときと後退させるときとで第1、第2トルクワイヤの合計のねじり剛性をほぼ等しくすればよい。このため、細部の構成は上記実施形態に限定されず適宜変更できる。例えば、上記実施形態では、第1、第2トルクワイヤをそれぞれ1本ずつ設ける例で説明をしたが、第1、第2トルクワイヤの数は適宜変更できる。もちろん、第1トルクワイヤと第2トルクワイヤの本数が同じでなくてもよい。
【0049】
また、上記実施形態では、第2トルクワイヤ(のピニオン)が直接駆動筒とは連結されておらず、第1トルクワイヤ(のピニオン)を介して駆動筒と連結されており、第2トルクワイヤの回転力が第1トルクワイヤを介して駆動筒に供給される例で説明をしたが、本発明はこれに限定されるものではない。図7に示すように、第1トルクワイヤ30aと同様のピニオン52bを第2トルクワイヤ50bの先端に設け、このピニオン52bを駆動筒24に直接歯合させ、第1トルクワイヤ30aを介さずに第2トルクワイヤ50bが直接駆動筒24に回転力を供給してもよい。本例では、上述した実施形態と反対に、第2トルクワイヤ50bがA方向に回転したときに駆動筒24がB方向に回転し、第2トルクワイヤ50bがB方向に回転したときに駆動筒24がA方向に回転する。このため、本例では、第2トルクワイヤ50bとして、複数のエレメントを上述した実施形態(図4参照)とは反対方向に縒り合わせたものを用い、駆動筒24の回転方向によらず第1、第2トルクワイヤ30a、50bの合計ねじり剛性がほぼ等しくなるようにしている。なお、図7では、上述した実施形態と同様の部材については同様の符号を付して説明を省略している。
【0050】
また、上記実施形態では、インナーユニットを三角筒状としているが、これに限定されることなく、円筒状、角筒状としてもよい。同様に、上記実施形態では、アウターユニットを円形としているが、これに限定されることなく、三角筒状、角筒状としてもよい。
【0051】
さらに、上記実施形態では、アウターユニット全体を覆うトロイド状のメンブレンを循環移動させて内視鏡を進退させているが、アウターユニットの周方向の一部を覆う複数のベルト状のメンブレンにより内視鏡を進退させてもよい。
【0052】
さらに、上記実施形態では、駆動筒のウォームギヤ部がヘリカルギヤを介してメンブレンを循環移動させる例で説明をしたが、ウォームギヤ部をヘリカルギヤを介さずに直接メンブレンに当接させ、ウォームギヤ部により直接メンブレンを循環移動させてもよい。
【0053】
また、上記実施形態は、本発明を医療診断用の内視鏡に適用したものであるが、本発明は医療診断用途に限られず、工業用等のその他の内視鏡やプローブ等に適用することも可能である。
【符号の説明】
【0054】
2 推進補助装置
3 先端硬性部
10 コントローラ
12 シース
15 メンブレン
16 インナーユニット
17 アウターユニット
24 駆動筒
30a 第1トルクワイヤ
30b、50b 第2トルクワイヤ
【技術分野】
【0001】
本発明は、内視鏡の先端に装着され、内視鏡を前進及び後進させる推進補助装置、及び、推進補助装置に対して駆動力を供給する駆動力供給方法に関するものである。
【背景技術】
【0002】
医療分野において内視鏡を利用した診断が行われている。内視鏡は、CCD等の撮像素子を内蔵した挿入部が被検体内に挿入される。この撮像素子により得られた画像はモニタに表示され、このモニタに表示された画像により被検体内を観察する。
【0003】
また、近年では、大腸のように曲がりくねった部位に対しても内視鏡を容易に挿脱できるように、回転体を回転駆動することによって内視鏡の挿入を補助する推進補助装置が提案されている(下記特許文献1、2参照)。このような推進補助装置は、回転体に駆動力を供給するためのフレキシブルなワイヤ(トルクワイヤ)を備え、トルクワイヤを一方向に回転させると内視鏡が前進し、トルクワイヤを反対方向に回転させると内視鏡が後退するように構成されている。なお、トルクワイヤとしては、複数の繊維状のエレメントを螺旋状に縒り合わせたものが用いられている(下記特許文献2、3参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2009−513250
【特許文献2】特開2005−253892
【特許文献3】特開2001−079007
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、トルクワイヤは、複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されているので、巻き締める方向と巻き緩める方向とでは巻き緩める方向の方がねじり剛性が低くトルクワイヤをねじってもこの力が他端に伝達され難い。このため、従来のように、1本のトルクワイヤを巻き締める方向と巻き緩める方向とに回転させることによって内視鏡を進退させる進退補助装置では、トルクワイヤを巻き締める方向と巻き緩める方向とに同じように回転させても、内視鏡は同じようには進退しない、すなわち、内視鏡を前進させるときと後退させるときとで操作性が異なってしまうといった問題があった。
【0006】
本発明は上記問題を解決するためのものであり、内視鏡を前進させるときと後退させるときとで操作性が異なることのない推進補助装置、及び、駆動力供給方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の推進補助装置は、内視鏡の先端部に装着される装着部と、装着部に回転自在に支持された回転体と、後端部がモータに接続され、先端部が前記回転体を回転駆動する駆動機構に接続され、前記モータの回転力を前記駆動機構に伝達して前記回転体を回転させるトルクワイヤとを備え、前記回転体を回転させて内視鏡を進退させる推進補助装置において、前記トルクワイヤは、第1、第2の2種類のトルクワイヤからなり、前記第1、第2トルクワイヤの双方を回転させることによって、前記回転体が回転して内視鏡が進退するとともに、前記第1トルクワイヤは、内視鏡を前進させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成され、前記第2トルクワイヤは、内視鏡を後退させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されていることを特徴としている。
【0008】
前記第1トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第1トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転し、前記第2トルクワイヤを前記第2方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第2トルクワイヤを前記第1方向に回転させることによって内視鏡を後端させる方向に前記回転体が回転するものでもよい。
【0009】
前記第1、第2トルクワイヤは、互いに同じ方向に捻るように前記エレメントを縒り合わせることによって形成されるものでもよい。
【0010】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、前記第2トルクワイヤの先端に前記第1ギヤと歯合する第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤ及び前記第1ギヤを介して前記駆動機構に伝達されるものでもよい。
【0011】
前記第1、第2トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第1、第2トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転するものでもよい。
【0012】
前記第1、第2トルクワイヤは、互いに反対方向に捻るように前記エレメントを縒り合わせることによって形成されるものでもよい。
【0013】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、前記第2トルクワイヤの先端に前記駆動機構に連結された第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤを介して前記駆動機構に伝達されるものでもよい。
【0014】
内視鏡を前進させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性と、内視鏡と後退させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性とがほぼ等しくなるように、前記第1、第2トルクワイヤが形成されていることが好ましい。
【0015】
前記第1、第2トルクワイヤをそれぞれ1本ずつ設けてもよい。
【0016】
また、上記目的を達成するため、本発明の駆動力供給方法は、内視鏡の先端部に装着されて回転体を回転させることで内視鏡を進退させる推進補助装置に対し、複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されたトルクワイヤによって駆動力を供給する駆動力供給方法において、前記トルクワイヤとして、第1、第2の2種類のトルクワイヤを用い、前記第1トルクワイヤを巻き締める方向に回転させるとともに、前記第2トルクワイヤを巻き緩める方向に回転させることによって内視鏡を前進させるための駆動力を供給し、前記第2トルクワイヤを巻き締める方向に回転させるとともに、前記第1トルクワイヤを巻き緩める方向に回転させることによって内視鏡を後退させるための駆動力を供給することを特徴としている。
【発明の効果】
【0017】
本発明では、第1、第2の2種類のトルクワイヤによって回転体を回転させるとともに、内視鏡を前進させるときは、第1トルクワイヤが巻き締まって第2トルクワイヤが巻き緩み、内視鏡を後退させるときは、第1トルクワイヤが巻き緩んで第2トルクワイヤが巻き締まるようにした。これにより、内視鏡を前進させるときと後退させるときとで第1、第2のトルクワイヤの合計のねじり剛性がほぼ等しくなり、操作性が異なることがない。
【図面の簡単な説明】
【0018】
【図1】推進補助装置を装着した内視鏡を示す説明図である。
【図2】メンブレンを展開した状態の推進補助装置の斜視図である。
【図3】メンブレンを展開した状態の推進補助装置の分解図である。
【図4】駆動筒を回転させる機構の説明図である。
【図5】推進補助装置の断面図である。
【図6】メンブレンの断面図である。
【図7】駆動筒を回転させる機構の説明図である。
【発明を実施するための形態】
【0019】
図1に示すように、推進補助装置2は内視鏡の先端硬性部3に固定して使用される。先端硬性部3には、例えば撮像光学系とともにCMOS型あるいはCCD型のイメージセンサが組み込まれ、先端硬性部3に設けられた照明窓からの照明光のもとで胃壁や腸壁の画像を撮像する。先端硬性部3を所期の位置まで挿入操作することができるように先端硬性部3の基端側には湾曲部が設けられ、また挿入操作を補助するために推進補助装置2が併用される。湾曲部は、操作部5に備えられたアングルノブの操作により挿入しやすいように屈曲動作させることができる。
【0020】
操作部5には、さらに、吸・排気/吸・排水の切替え操作を行うための操作ボタン、生検鉗子などが挿入される鉗子チャンネルの口金などが設けられている。操作部5からは接続コード6が引き出され、光源装置7と内視鏡プロセッサ8に接続されている。光源装置7に組み込まれた照明ランプからの光は、接続コード6内及び内視鏡内部に組み込まれたライトガイドファイバを通して照明窓まで導光される。内視鏡プロセッサ8は、接続コード6から入力される画像信号に適宜の信号処理を行い、得られた画像は表示モニタ9に表示される。なお、内視鏡プロセッサ8は、接続コード6を経由して供給される内視鏡からの入力情報に基づき、現在接続されている内視鏡の機種情報を識別することができる。そして、内視鏡が操作されるときに機種ごとに異なった制御が必要である場合、あるいは機種ごとに表示モニタ9上で異なった画像表示が必要である場合などには、機種情報に対応した適切な制御あるいは表示に自動切り替えすることが可能となる。
【0021】
内視鏡プロセッサ8にはコントローラ10が電気的に接続される。コントローラ10は推進補助装置2の作動を監視・制御するために用いられる。推進補助装置2の後端から並列二連となった柔軟なシース12が引き出されている。シース12はサージカルテープ4などにより内視鏡の挿入部に適宜に固定され、推進補助装置2を装着した内視鏡を体腔内に挿入しあるいは操作する際にシース12が体腔内で不用意な挙動をすることはない。
【0022】
ダブルルーメン型のシース12内には、推進補助装置2の内部機構に先端部が機械的に連結された第1、第2の2種類のトルクワイヤ30a、30b(図4参照)がそれぞれ挿通されている。第1、第2トルクワイヤ30a、30bは可撓性を有しながらもねじり剛性が高く、一端側から入力されたトルクをほとんど減衰させることなく他端側に伝達する。これら第1、第2トルクワイヤ30a、30bの後端は二股のプラグ13を介してコントローラ10のコネクタ14に連結される。コントローラ10には一対の第1、第2モータ31a、31b(図4参照)が組み込まれ、プラグ13をコネクタ14に連結すると、第1トルクワイヤ30aは第1モータ31aにより駆動できる状態になり、第2トルクワイヤ30bは第2モータ31bにより駆動できる状態になる。
【0023】
大腸用の内視鏡の場合、特にS状結腸や横行結腸における挿入操作や引き出し操作を楽にする目的で、推進補助装置2が効果的に用いられる。推進補助装置2は略円柱形状を有し、外表面がトロイド状の循環移動体となる柔軟かつ強靱な合成樹脂製のシート材からなるメンブレン15で覆われている。図2及び図3では、構造を分かりやすくするためにメンブレン15を筒状に展開して表しているが、メンブレン15はその最終的な組み込み形態では、図示の内周面が外周面となるように反転させた状態で前端と後端とが互いに接合され、トロイド状の袋体(図5参照)となる。なお、図2〜図5は、図中左方が先端硬性部3を突出させる先端側、図中右方が内視鏡の操作部5に近い基端側になるように表されている。
【0024】
図2及び図3に示すように、推進補助装置2は、筒状に展開したメンブレン15の内側の構造体となるインナーユニット16と、メンブレン15の外側の構造体となるアウターユニット17とを備えている。インナーユニット16は、内周側に円筒状の中空部を有し、外周面側が三角筒形状に整形されたキャリア筒18と、キャリア筒18の後端側にビス止め、圧入、カシメ等で係止止めされる略三角筒状のキャップ28と、キャリア筒18の先端側、キャップ28の後端側にそれぞれ固定されるフロントワイパー19a,リアワイパー19bと、キャリア筒18の前端側内周に形成されたネジに螺合して回転により軸方向に移動するクランパ20と、クランパ20の軸方向への移動に応じて内・外径が拡大/縮小する合成樹脂製のCリング21と、キャリア筒18の内周に回転自在に支持された円筒状の駆動筒24(図4参照)を有している。
【0025】
図4に示すように、駆動筒24はその両端がベアリングボール25を円環状に並べて保持した軸受リング26a,26bを介してキャリア筒18の内周側に回転自在に支持され、キャリア筒18の後端に固定されたキャップ28により抜け止めされる。駆動筒24の外周面にはウォームギヤ部24aと平ギヤ部24bとが設けられている。ウォームギヤ部24aには、キャリア筒18に回転自在に保持された一対のヘリカルギヤ27、27がキャリア筒18の開口を通して噛み合わされる。この一対のヘリカルギヤ27,27は、駆動筒24の回転中心軸に関して120度の回転対称となる3個所にそれぞれ組み付けられ、駆動筒24が回転するとこれらのヘリカルギヤ27,27はそれぞれの軸27aを中心に一斉に同方向に回転する。
【0026】
シース12の先端は、キャップ28の後端側から形成された凹部内に接着または熱溶着などによって固着される。そしてシース12の先端から突出した第1、第2トルクワイヤ30a,30bの先端部は、キャップ28に形成された貫通孔を通ってキャップ28の前方に突出し、その各々にピニオン32a,ピニオン32bが固着される。図示のように、ピニオン32a,ピニオン32bの各々の先端から回転中心となる軸が突出し、これらの軸がキャリア筒に設けられた穴に挿通されることによってピニオン32a,ピニオン32bの各々が回転自在に支持される。これらのピニオン32a,32bのうち、駆動筒24の平ギヤ部24bには第1トルクワイヤ30aに固着されたピニオン32aが噛み合う。他方の第2トルクワイヤ30bに連結されたピニオン32bはピニオン32aに噛み合い、平ギヤ部24bには噛み合わされない。したがって、駆動筒24は第1トルクワイヤ30aに連結されたピニオン32aの回転によって駆動される。しかし、第1、第2トルクワイヤ30a,30bの各々は、第1、第2モータ31a、31bから個別に供給される回転力で駆動され、ピニオン32bはピニオン32aとは逆向きに回転される。このためピニオン32aには第2トルクワイヤ30bからの回転力も加算され、駆動筒24を高いトルクで回転させることができる。
【0027】
第1、第2トルクワイヤ30a、30bは、複数の繊維状のエレメント(本実施形態ではエレメントとして鋼線を用いた)を螺旋状に縒り合わせることによって形成されている。そして、第1トルクワイヤ30aは、第1モータ31aが図4のB方向に回転したときに巻き締まり、駆動筒24を図4のA方向(先端硬性部3を前進させる方向)に回転させる。他方、第2トルクワイヤ30bは、第2モータ31bが図4のB方向に回転したときに巻き締まり、駆動筒24を図4のB方向(先端硬性部3を後退させる方向)に回転させる。このように、本発明では、駆動筒24を回転させるときに第1、第2トルクワイヤ30a、30bの一方が巻き締まり、他方が巻き緩むように構成されている。
【0028】
一般に、トルクワイヤは、巻き締める方向のねじり剛性が巻き緩める方向のねじり剛性よりも高い。このため、1本のトルクワイヤを巻き締める方向と巻き緩める方向とに回転させることによって駆動筒24を回転させる場合、駆動筒24をA方向に回転させるときとB方向に回転させるときとで、トルクワイヤのねじり剛性が異なってしまう。これに対して、本発明では、第1、第2の2本のトルクワイヤ30a、30bを用い、一方を巻き締める方向に回転させ、他方を巻き緩む方向に回転させることによって駆動筒24を回転させているので、駆動筒24の回転方向によらず第1、第2トルクワイヤ30a、30bの合計のねじり剛性がほぼ等しくなっている。
【0029】
フロントワイパー19a及びリアワイパー19bのそれぞれは、先端側に庇状に広がったスリーブ部を有し、これらのスリーブ部の先端はメンブレン15が循環移動するときに内周側の面に摺接する。そして、メンブレン15の内周側の面に付着した異物や消化管内壁がメンブレン15の移動とともに推進補助装置2の中に引き込まれることを防ぐ。
【0030】
クランパ20の前端には、規則的な凹凸係合部が周方向に整列して設けられ、専用の治具を先端側から挿入してクランパ20に係合させることができる。治具の回転操作でクランパ20をねじ込み方向に回転させてゆくと、クランパ20が後端側に移動し、後端のテーパ面20a(図5参照)の押圧を受けてCリング21が縮径するように変形する。したがって、キャリア筒18の円筒状の中空部に内視鏡の先端硬性部3を挿入した後、クランパ20のねじ込み操作を行ってゆくとCリング21の内周面が先端硬性部3の外周面に強く押し付けられ、キャリア筒18を先端硬性部3に固定することができる。
【0031】
メンブレン15の外側の構造体となるアウターユニット17は、先端側から順に、フロントバンパー35aと、シールドカバー36と、円筒状のローラ保持筒38と、リアバンパー35bとを有する。このアウターユニット17は、以下の手順にしたがってインナーユニット16及びメンブレン15と一体的に連結した状態に組み立てられる。
【0032】
図2及び図3に示すように、各種部品を組み込んだインナーユニット16の外表面が覆われるように筒状に展開したメンブレン15の中にインナーユニット16を入れた後、ローラ保持筒38の中空部内に、メンブレン15を被せた状態のインナーユニット16を挿入する。ローラ保持筒38には、その中心軸に関して120度の回転対称となる3個所に軸方向に長い略矩形の開口38aが形成されている。この開口38aにはローラアセンブリ40が組み付けられる。
【0033】
ローラアセンブリ40は、一対の細長いフレーム41の間に3本のローラ42を整列保持させたものである。フレーム41は弾性力に富む金属薄板製で、各々の両端を開口38aの前・後端に形成された係合部に嵌め込んでこれらをローラ保持筒38に固定すると、フレーム41の長手方向中央部が開口38aを通してローラ保持筒38の中空部内に入り込むように湾曲する。こうしてフレーム41が湾曲することによって、フレーム41で保持された3本のローラ42はメンブレン15をヘリカルギヤ27に向かって押し付ける。この結果、図5に示すように、メンブレン15が一対のヘリカルギヤ27と3本のローラ42との間に強く挟持される。ここで、3本のうちの中央のローラ42は、その支軸がフレーム41の長手方向に延びた長孔で支持されているためフレーム41の長手方向での位置に関して自由度をもつ。したがって、両側の2本のローラとの相対位置に関しては、一対のヘリカルギヤ27との間にメンブレン15を最もバランスよく挟持できる位置に自動調整される。
【0034】
こうして3個所の開口38aを覆うように、ローラ保持筒38にローラアセンブリ40が組み付けられると、各ローラ42がローラ保持筒38の内側に突出するためインナーユニット16に対してローラ保持筒38は軸方向に移動できなくなり、これらはメンブレン15を挟んだ状態で一体的に組み合わされる。そして、ローラ保持筒38の先端にフロントバンパー35a、後端にリアパンパー35bが固定される。フロントパンパー35aの先端部及びリアパンパー35bの後端部には、ローラアセンブリ40と軸方向に並ぶように外周の三個所にそれぞれ溝45a,45bが設けられている。さらに、ローラアセンブリ40を含めてローラ保持筒38の外表面を緊密に覆うようにシールドカバー36が被せられる。
【0035】
インナーユニット16とアウターユニット17との間に筒状に展開されたメンブレン15を挟み、これらを一体的に組み合わせた後に、メンブレン15の前端と後端とをそれぞれ逆向きに反転させて裏返しにしてから接合する。このとき、それぞれの接合面に傾斜をつけておけば、接合部15aに極端な厚みムラが生じることがない。図5は組み立て後の推進補助装置2の断面を模式的に示している。このようにトロイド状に接合することによって、メンブレン15はアウターユニット17を全体的に包み込むような内部空間を備える。この内部空間にはエアー、生理食塩水、コロイド状の合成樹脂材料、オイルやグリスなどの潤滑材等、適宜のものを封入することも可能である。
【0036】
図6に円筒状にしたメンブレン15の断面構造の一例を示す。メンブレン15は、例えばウレタン樹脂などのシート材を積層した構造を有し、内周側には円周を三等分する位置に断面が台形状の隆起部50が形成されている。この隆起部50は、他の薄肉部51よりもシート材の積層数を多くすることによって厚くした部分で、メンブレン15の軸方向全長にわたって形成されている。隆起部50の内周面にはヘリカルギヤ27と噛み合うように斜めに傾斜した歯を並べたギヤ列52が設けられている。また、メンブレン15の外周面には隆起部50の位置に対応して軸方向に延びたリブ53が設けられ、さらにギヤ列52とリブ53との間にはメッシュ状の繊維シート54が積層されている。
【0037】
メンブレン15は、図5に示すようにトロイド状にして用いられる。このとき、軸方向に延びた三列の隆起部50がそれぞれヘリカルギヤ27とローラ42との間に挟持され、しかもギヤ列52にヘリカルギヤ27が噛み合わされる。そしてヘリカルギヤ27の回転がギヤ列52を介して直接的にメンブレン15に伝達され、メンブレン15を軸方向に効率的に移動させることができる。隆起部50はシート材の多層構造からなり、しかもメッシュ状の繊維シート54も積層されているから、ヘリカルギヤ27から直接的に駆動力を受けてもギヤ列52が延び変形したりメンブレン15が破断したりすることはなく、十分な機械的強度を確保することができる。また、隆起部50以外は薄肉部51にしてあるから、メンブレン15がインナーユニット16とアウターユニット17との間を通過するときの抵抗を減らすことができる。
【0038】
さらに、隆起部50の内面側に設けられたリブ53は、メンブレン15の移動とともにローラ42の中央部分に形成された溝に係合する。また、アウターユニット17がメンブレン15で緊密に包み込まれるようにトロイド形状の内部空間を縮小調節する場合には、リブ53はフロントバンパー35a及びリアバンパー35bの溝45a,45bにも係合するようになる。このようにリブ53を利用することによって、メンブレン15を軸方向に移動させるときの蛇行を防ぎ、移動経路を安定に保つことができる。
【0039】
以下、上記構成による本発明の作用について説明する。図1に示すように、推進補助装置2は、先端硬性部3の先端を部分的に突出させた状態で内視鏡に固定される。この固定に際しては専用の治具が用いられ、クランパ20が時計方向に回転される。クランパ20はキャリア筒18の先端側内周に形成された右ネジに螺合しているから、時計方向への回転により奥側(後端側)へと移動してテーパ面20aでCリング21を押圧する。Cリング21の前面には外周側ほど後端側に傾斜した斜面が形成され、この斜面がクランパ20のテーパ面20aによって押圧されることにより、Cリング21は直径が狭まるように弾性変形する。こうしてCリング21が変形すると、キャリア筒18の中空部に挿入されている内視鏡の先端硬性部3がCリング21で締めつけられ、推進補助装置2は先端硬性部3の外周面に緊密に固定される。
【0040】
推進補助装置2の後端から引き出されたシース12を内視鏡の湾曲部から軟性部の表面に沿わせるように引き延ばす。シース12の表面には適切な間隔でテープ止め位置を表す表示が設けられている。この表示に合わせてサージカルテープ4などを利用してシース12を内視鏡の湾曲部や軟性部に固定する。そして、シース後端のプラグ13をコネクタ14に挿入してコントローラ10に接続し、コントローラ10の電源をオンする。コントローラ10は、電源がオンされたときにコネクタ14にプラグ13が接続されているか否かを電気的にチェックし、未接続あるいは適正に接続されていないときには音あるいは警告灯などの点滅により報知する。接続が適正であるときには、コネクタ14に組み込まれたセンサーがプラグ13のブリッジ部分に設けられている信号部から推進補助装置2の機種情報を読み取る。そしてコントローラ10は、読み取った機種情報に応じて第1、第2トルクワイヤ30a、30bの回転速度やトルクリミッタの値を自動設定し、第1、第2トルクワイヤ30a,30bが過大な速度やトルクで回転されることを防止する。
【0041】
また、コントローラ10は、電源がオンされたときに、内視鏡プロセッサ8に接続されている内視鏡の機種情報を内視鏡プロセッサ8からの電気信号として受け取る。コントローラ10は、現在使用されている内視鏡の機種情報と、推進補助装置2の機種情報とをコントローラ10の内部記憶手段で保有しているテーブル情報で照合する。テーブル情報には、内視鏡の機種ごとに適用可能な推進補助装置2の機種を対応づけた照合データが格納されている。そして、例えば推進補助装置2の機種情報からCリング21の拡縮範囲が特定され、また内視鏡の機種情報から内視鏡の先端硬性部3の外径が特定されれば、その推進補助装置2がその内視鏡の先端硬性部3に適正に装着して使用できるか否かは即座に判定することができる。したがって、もし不適切な組み合わせであると判定されたときには、警告音や警告灯の点滅などにより報知を行い、あるいは同時に推進補助装置2の作動を禁止するなどの手段を講じることによって、思わぬ事故の発生を防ぐことができる。
【0042】
コントローラ10に接続されたフットスイッチ11を操作すると、コントローラ10内で一対の第1、第2モータ31a、31bが回転して第1、第2トルクワイヤ30a,30bには回転力が加えられる。この回転力はそれぞれピニオン32a,32bに伝えられ、ピニオン32aに噛み合っている平ギヤ部24bを介して駆動筒24を回転させる。ピニオン32bはピニオン32aとは逆方向に回転され、その回転はピニオン32aにそのまま伝達されるようにしている。したがって、コントローラ10内の一対の第1、第2モータ31a、31bの双方を利用して駆動筒24を回転させることができる。
【0043】
駆動筒24を回転させるときは、第1、第2の2本のトルクワイヤ30a、30bを用いるとともに、第1、第2トルクワイヤ30a、30bの一方を巻き締める方向に回転させ他方を巻き緩む方向に回転させるので、駆動筒24をA方向及びB方向のいずれに回転させる場合であっても第1、第2トルクワイヤ30a、30bの合計のねじり剛性がほぼ等しい。これにより、例えば、駆動筒24をA方向に回転させるときはフットスイッチ11の操作に対して敏感に反応し、駆動筒24をB方向に回転させるときはフットスイッチ11の操作に対して反応が鈍感になるなどの問題が生じることなく、フットスイッチ11の操作態様と駆動筒24の回転態様とが一致するので、違和感なく駆動筒24を回転できる。
【0044】
駆動筒24の回転とともにウォームギヤ部24aが回転すると、ヘリカルギヤ27がそれぞれの軸27aを中心に一斉に同じ方向に回転する。ヘリカルギヤ27の歯面と、ローラアセンブリ40の各ローラ42との間にはメンブレン15が強く挟持されているから、ヘリカルギヤ27の回転とともにローラ42が従動して両者で挟持されたメンブレン15は駆動筒24の軸方向に移動する。例えば図5においてヘリカルギヤ27が時計方向に回転するとローラ42は反時計方向に回転し、これらに挟持されているメンブレン15は、内周側(アウターユニット17の内側)では後端側から先端側へと移動するように送られ、メンブレン15の外周側(アウターユニット17の外側)ではメンブレン15は先端側から後端側へと送られる。すなわち図中に矢線Yで示すように、トロイド状のメンブレン15はその全周で先端では内周側から外周側へと順次に送り出され、後端では外周側から内周側へと順次に繰り込まれるように循環移動する。
【0045】
内視鏡が推進補助装置2とともに大腸に挿入され、メンブレン15の外周側の面が腸壁に接触した状態になっていると、メンブレン15が上記循環移動を行っている間は、内視鏡の先端硬性部3を前進させる方向への推進力が得られ、あるいは大腸壁を手前側にたぐり寄せる作用力を得ることができる。反対にメンブレン15が逆方向に循環移動を行っている間は、内視鏡の先端硬性部3を後退させる方向への推進力が得られ、あるいは大腸壁を奥側にたぐり寄せる作用力を得ることができる。前述のように、メンブレン15は駆動筒24の回転によって循環駆動され、この駆動筒24の回転はフットスイッチ11により制御できる。そして、フットスイッチ11の操作態様と駆動筒24の回転態様は、駆動筒24の回転方向によらず一致しているので、違和感なく駆動筒24を回転、すなわち、違和感なく内視鏡を進退できる。
【0046】
また、内視鏡を前進させているときには、メンブレン15の外周側に付着した異物などはアウターユニット17の後端側から内周側に移動してくるが、その直前でリアワイパー19bの後端側に延びたスリーブ部の先端がメンブレン15と摺接して異物が引き込まれることを阻止する。もちろん、メンブレン15の移動とともに生体組織の一部が巻き込まれることも防止することができる。なお、内視鏡を後退させているときには、フロントワイパー19aのスリーブ部の先端が同等の作用を果たすことになる。
【0047】
推進補助装置2を先端硬性部から取り外すときには、治具を利用してクランパ20を反時計方向に回転させる。これによりクランパ20は回転しながら手前に移動し、Cリング21への押圧を解除する。この結果、自身の弾性によってCリング21が拡径して内周面が先端硬性部3の外周面から離れるから、推進補助装置2は内視鏡から簡単に取り外すことができるようになる。
【0048】
なお、本発明は、第1、第2の2種類のトルクワイヤを用いて内視鏡に推進力を供給するとともに、推進力を供給するときに、第1、第2の一方のトルクワイヤが巻き締まり、他方が巻き緩むように構成することによって、内視鏡を前進させるときと後退させるときとで第1、第2トルクワイヤの合計のねじり剛性をほぼ等しくすればよい。このため、細部の構成は上記実施形態に限定されず適宜変更できる。例えば、上記実施形態では、第1、第2トルクワイヤをそれぞれ1本ずつ設ける例で説明をしたが、第1、第2トルクワイヤの数は適宜変更できる。もちろん、第1トルクワイヤと第2トルクワイヤの本数が同じでなくてもよい。
【0049】
また、上記実施形態では、第2トルクワイヤ(のピニオン)が直接駆動筒とは連結されておらず、第1トルクワイヤ(のピニオン)を介して駆動筒と連結されており、第2トルクワイヤの回転力が第1トルクワイヤを介して駆動筒に供給される例で説明をしたが、本発明はこれに限定されるものではない。図7に示すように、第1トルクワイヤ30aと同様のピニオン52bを第2トルクワイヤ50bの先端に設け、このピニオン52bを駆動筒24に直接歯合させ、第1トルクワイヤ30aを介さずに第2トルクワイヤ50bが直接駆動筒24に回転力を供給してもよい。本例では、上述した実施形態と反対に、第2トルクワイヤ50bがA方向に回転したときに駆動筒24がB方向に回転し、第2トルクワイヤ50bがB方向に回転したときに駆動筒24がA方向に回転する。このため、本例では、第2トルクワイヤ50bとして、複数のエレメントを上述した実施形態(図4参照)とは反対方向に縒り合わせたものを用い、駆動筒24の回転方向によらず第1、第2トルクワイヤ30a、50bの合計ねじり剛性がほぼ等しくなるようにしている。なお、図7では、上述した実施形態と同様の部材については同様の符号を付して説明を省略している。
【0050】
また、上記実施形態では、インナーユニットを三角筒状としているが、これに限定されることなく、円筒状、角筒状としてもよい。同様に、上記実施形態では、アウターユニットを円形としているが、これに限定されることなく、三角筒状、角筒状としてもよい。
【0051】
さらに、上記実施形態では、アウターユニット全体を覆うトロイド状のメンブレンを循環移動させて内視鏡を進退させているが、アウターユニットの周方向の一部を覆う複数のベルト状のメンブレンにより内視鏡を進退させてもよい。
【0052】
さらに、上記実施形態では、駆動筒のウォームギヤ部がヘリカルギヤを介してメンブレンを循環移動させる例で説明をしたが、ウォームギヤ部をヘリカルギヤを介さずに直接メンブレンに当接させ、ウォームギヤ部により直接メンブレンを循環移動させてもよい。
【0053】
また、上記実施形態は、本発明を医療診断用の内視鏡に適用したものであるが、本発明は医療診断用途に限られず、工業用等のその他の内視鏡やプローブ等に適用することも可能である。
【符号の説明】
【0054】
2 推進補助装置
3 先端硬性部
10 コントローラ
12 シース
15 メンブレン
16 インナーユニット
17 アウターユニット
24 駆動筒
30a 第1トルクワイヤ
30b、50b 第2トルクワイヤ
【特許請求の範囲】
【請求項1】
内視鏡の先端部に装着される装着部と、装着部に回転自在に支持された回転体と、後端部がモータに接続され、先端部が前記回転体を回転駆動する駆動機構に接続され、前記モータの回転力を前記駆動機構に伝達して前記回転体を回転させるトルクワイヤとを備え、前記回転体を回転させて内視鏡を進退させる推進補助装置において、
前記トルクワイヤは、第1、第2の2種類のトルクワイヤからなり、
前記第1、第2トルクワイヤの双方を回転させることによって、前記回転体が回転して内視鏡が進退するとともに、
前記第1トルクワイヤは、内視鏡を前進させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成され、
前記第2トルクワイヤは、内視鏡を後退させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されていることを特徴とする推進補助装置。
【請求項2】
前記第1トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第1トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転し、
前記第2トルクワイヤを前記第2方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第2トルクワイヤを前記第1方向に回転させることによって内視鏡を後端させる方向に前記回転体が回転することを特徴とする請求項1記載の推進補助装置。
【請求項3】
前記第1、第2トルクワイヤは、互いに同じ方向に捻るように前記エレメントを縒り合わせることによって形成されることを特徴とする請求項2記載の推進補助装置。
【請求項4】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、
前記第2トルクワイヤの先端に前記第1ギヤと歯合する第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤ及び前記第1ギヤを介して前記駆動機構に伝達されることを特徴とする請求項3記載の推進補助装置。
【請求項5】
前記第1、第2トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、
前記第1、第2トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転することを特徴とする請求項1記載の推進補助装置。
【請求項6】
前記第1、第2トルクワイヤは、互いに反対方向に捻るように前記エレメントを縒り合わせることによって形成されることを特徴とする請求項5記載の推進補助装置。
【請求項7】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、
前記第2トルクワイヤの先端に前記駆動機構に連結された第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤを介して前記駆動機構に伝達されることを特徴とする請求項6記載の推進補助装置。
【請求項8】
内視鏡を前進させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性と、内視鏡と後退させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性とがほぼ等しくなるように、前記第1、第2トルクワイヤが形成されていることを特徴とする請求項1〜7いずれか記載の推進補助装置。
【請求項9】
前記第1、第2トルクワイヤをそれぞれ1本ずつ設けたことを特徴とする請求項1〜8いずれか記載の推進補助装置。
【請求項10】
内視鏡の先端部に装着されて回転体を回転させることで内視鏡を進退させる推進補助装置に対し、複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されたトルクワイヤによって駆動力を供給する駆動力供給方法において、
前記トルクワイヤとして、第1、第2の2種類のトルクワイヤを用い、
前記第1トルクワイヤを巻き締める方向に回転させるとともに、前記第2トルクワイヤを巻き緩める方向に回転させることによって内視鏡を前進させるための駆動力を供給し、
前記第2トルクワイヤを巻き締める方向に回転させるとともに、前記第1トルクワイヤを巻き緩める方向に回転させることによって内視鏡を後退させるための駆動力を供給することを特徴する駆動力供給方法。
【請求項1】
内視鏡の先端部に装着される装着部と、装着部に回転自在に支持された回転体と、後端部がモータに接続され、先端部が前記回転体を回転駆動する駆動機構に接続され、前記モータの回転力を前記駆動機構に伝達して前記回転体を回転させるトルクワイヤとを備え、前記回転体を回転させて内視鏡を進退させる推進補助装置において、
前記トルクワイヤは、第1、第2の2種類のトルクワイヤからなり、
前記第1、第2トルクワイヤの双方を回転させることによって、前記回転体が回転して内視鏡が進退するとともに、
前記第1トルクワイヤは、内視鏡を前進させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成され、
前記第2トルクワイヤは、内視鏡を後退させる際に巻き締まるように複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されていることを特徴とする推進補助装置。
【請求項2】
前記第1トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第1トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転し、
前記第2トルクワイヤを前記第2方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、前記第2トルクワイヤを前記第1方向に回転させることによって内視鏡を後端させる方向に前記回転体が回転することを特徴とする請求項1記載の推進補助装置。
【請求項3】
前記第1、第2トルクワイヤは、互いに同じ方向に捻るように前記エレメントを縒り合わせることによって形成されることを特徴とする請求項2記載の推進補助装置。
【請求項4】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、
前記第2トルクワイヤの先端に前記第1ギヤと歯合する第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤ及び前記第1ギヤを介して前記駆動機構に伝達されることを特徴とする請求項3記載の推進補助装置。
【請求項5】
前記第1、第2トルクワイヤを第1方向に回転させることによって内視鏡を前進させる方向に前記回転体が回転し、
前記第1、第2トルクワイヤを前記第1方向とは反対の第2方向に回転させることによって内視鏡を後退させる方向に前記回転体が回転することを特徴とする請求項1記載の推進補助装置。
【請求項6】
前記第1、第2トルクワイヤは、互いに反対方向に捻るように前記エレメントを縒り合わせることによって形成されることを特徴とする請求項5記載の推進補助装置。
【請求項7】
前記第1トルクワイヤの先端に前記駆動機構に連結された第1ギヤが取り付けられており、前記第1トルクワイヤの回転力が前記第1ギヤを介して前記駆動機構に伝達されるとともに、
前記第2トルクワイヤの先端に前記駆動機構に連結された第2ギヤが取り付けられており、前記第2トルクワイヤの回転力が前記第2ギヤを介して前記駆動機構に伝達されることを特徴とする請求項6記載の推進補助装置。
【請求項8】
内視鏡を前進させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性と、内視鏡と後退させる方向に前記第1、第2トルクワイヤをねじったときの前記第1、第2トルクワイヤの合計のねじり剛性とがほぼ等しくなるように、前記第1、第2トルクワイヤが形成されていることを特徴とする請求項1〜7いずれか記載の推進補助装置。
【請求項9】
前記第1、第2トルクワイヤをそれぞれ1本ずつ設けたことを特徴とする請求項1〜8いずれか記載の推進補助装置。
【請求項10】
内視鏡の先端部に装着されて回転体を回転させることで内視鏡を進退させる推進補助装置に対し、複数の繊維状のエレメントを螺旋状に縒り合わせることによって形成されたトルクワイヤによって駆動力を供給する駆動力供給方法において、
前記トルクワイヤとして、第1、第2の2種類のトルクワイヤを用い、
前記第1トルクワイヤを巻き締める方向に回転させるとともに、前記第2トルクワイヤを巻き緩める方向に回転させることによって内視鏡を前進させるための駆動力を供給し、
前記第2トルクワイヤを巻き締める方向に回転させるとともに、前記第1トルクワイヤを巻き緩める方向に回転させることによって内視鏡を後退させるための駆動力を供給することを特徴する駆動力供給方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−111341(P2013−111341A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261518(P2011−261518)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
[ Back to top ]