
描画システム
【課題】運転者が一目瞭然で方面標識に関する交差点での進行方向を知ることが可能となる描画システムを提供する。
【解決手段】ナビゲーションECU3は、方面標識の地図上での絶対位置座標、方面標識の地上からの高さ情報等の標識情報に基づいて、前方撮像用カメラ14の撮像画像内の方面標識を画像処理により認識し、自車両の進行方向に合致する方面名称や矢印マークをパターンマッチング等により認識する(S6)。また、ナビゲーションECU3は、該撮像画像内の方面標識上における進行方向に合致する方面名称や矢印マークと自車両との正確な相対位置関係を求め、この方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して、自車位置や自車方位からレーザ照射角度を決定し、レーザー描画装置4により所定照射形状のマークを描画する(S7〜S9)。
【解決手段】ナビゲーションECU3は、方面標識の地図上での絶対位置座標、方面標識の地上からの高さ情報等の標識情報に基づいて、前方撮像用カメラ14の撮像画像内の方面標識を画像処理により認識し、自車両の進行方向に合致する方面名称や矢印マークをパターンマッチング等により認識する(S6)。また、ナビゲーションECU3は、該撮像画像内の方面標識上における進行方向に合致する方面名称や矢印マークと自車両との正確な相対位置関係を求め、この方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して、自車位置や自車方位からレーザ照射角度を決定し、レーザー描画装置4により所定照射形状のマークを描画する(S7〜S9)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されて道路上に設けられる方面標識に所定形状のマークを描画して交差点での進行方向を案内する描画システムに関するものである。
【背景技術】
【0002】
従来より、車両に搭載されて道路上に設けられる方面標識の案内を行う装置が種々提案されている。
例えば、車両が交差点における各分岐方向の行く先を示す方面標識に接近した場合に、表示画面に方面標識を表示し、また、音声による案内で案内経路に方面標識が存在することを運転者に知らせるナビゲーション装置がある(例えば、特許文献1参照。)。
【特許文献1】特開平11−337359号公報(段落(0007)〜(0041)、図1〜図29)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記した特許文献1に記載されたナビゲーション装置では、表示画面に方面標識を表示した場合には、運転者は前方から目を逸らす必要があり、また、音声による案内では案内内容を聞いて、理解する必要があるという問題がある。
【0004】
そこで、本発明は、上述した問題点を解決するためになされたものであり、運転者が前方から目を逸らす必要がなく、また、音声による案内の内容を理解するまでもなく、一目瞭然で方面標識に関する交差点での進行方向を知ることが可能となる描画システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため請求項1に係る描画システムは、自車位置を検出する自車位置検出手段(32、11、12、13、15)と、交差点の位置情報を含む地図情報を記憶する地図情報記憶手段(33)と、道路上に設けられる方面標識の位置情報と進行方向に関する進行方向情報とを含む標識情報を記憶する標識情報記憶手段(36)と、目的地までの経路を探索する経路探索手段(3、33)と、前記自車位置と前記地図情報とに基づいて前記経路上の交差点への接近を検出する交差点接近検出手段(3、32、33)と、前記交差点接近検出手段の検出結果に基づいて自車両が接近する交差点に関する前記標識情報を取得する標識情報取得手段(3、36)と、自車両の前方を撮像する撮像手段(14)と、前記交差点接近検出手段の検出結果に基づいて前記撮像手段による撮像画像内の方面標識を認識する認識手段(3)と、前記認識手段による認識結果に基づいて自車両と前記方面標識との相対位置を算出する相対位置算出手段(3)と、前記経路に基づいて前記標識情報取得手段によって取得された標識情報から自車両が接近する交差点での進行方向に合致する進行方向情報を選択する進行方向情報選択手段(3)と、前記相対位置算出手段によって算出した自車両と前記方面標識との相対位置に基づいて前記進行方向情報選択手段によって選択された進行方向情報を指し示す所定形状のマークを道路上に設けられる方面標識上に描画する描画手段(3、31、34、4)と、を備えたことを特徴とする。
【0006】
また、請求項2に係る描画システムは、請求項1に記載の描画システム(1)において、前記標識情報は、前記方面標識の高さ情報を含み、前記認識手段(3)は、前記高さ情報に基づいて前記撮像画像内の方面標識を認識する範囲を決定することを特徴とする。
【0007】
更に、請求項3に係る描画システムは、請求項1又は請求項2に記載の描画システム(1)において、前記進行方向情報は、前記交差点から進行する各進行方向と該各進行方向に対応する各方面名称とを含むことを特徴とする。
【発明の効果】
【0008】
前記構成を有する請求項1に係る描画システムでは、自車位置と地図情報とに基づいて、探索した目的地までの経路上における交差点への接近を検出する。また、道路上に設けられる方面標識の位置情報と進行方向に関する進行方向情報とを含む標識情報を記憶しており、探索した経路上における交差点への接近を検出した場合には、該交差点に関する標識情報を取得する。そして、探索した経路に基づいて、この取得した標識情報から自車両が接近する交差点での進行方向に合致する進行方向情報を選択する。また、探索した経路上における交差点への接近を検出した場合には、自車両の前方を撮像する撮像手段により撮像画像内の方面標識を認識して、自車両と前方の方面標識との相対位置を算出する。そして、この算出した自車両と方面標識との相対位置に基づいて、この方面標識上に、交差点に関する標識情報から選択した進行方向情報を指し示す所定形状のマークを描画する。
これにより、自車両が探索された経路上の交差点に関する方面標識に接近した場合には、自車両の前方を撮像する撮像手段により撮像画像内の方面標識が認識されて、この方面標識上の自車両の進行方向に合致する進行方向情報を指し示す所定形状のマークが描画されるため、運転者は、前方の方面標識上に描画された所定形状のマークに基づいて、進路変更をすることが可能となり、前方から目を逸らす必要がなく、一目瞭然でこの方面標識に関する交差点での進行方向を知ることが可能となる。
【0009】
また、請求項2に係る描画システムでは、撮像手段による撮像画像内の方面標識を認識する認識手段は、標識情報に含まれる方面標識の高さ情報に基づいて、この撮像画像内の方面標識を認識する範囲を決定するため、方面標識の認識処理の高速化を図ることができ、自車両と方面標識との相対位置をより正確に算出することが可能となる。
【0010】
更に、請求項3に係る描画システムでは、進行方向情報には、交差点から進行する各進行方向と該各進行方向に対応する各方面名称とが含まれるため、方面標識上に表示される各方面名称から、自車両の進行方向に合致する方面名称を選択して、所定形状のマークで指し示すことが可能となり、運転者は、前方から目を逸らすことなく、この方面標識に関する交差点での進行方向を更に容易に知ることが可能となる。
【発明を実施するための最良の形態】
【0011】
以下、本発明に係る描画システムをレーザー描画システムについて具体化した一実施例に基づき図面を参照しつつ詳細に説明する。
【実施例】
【0012】
先ず、本実施例に係るレーザー描画システムの概略構成について図1に基づいて説明する。図1は本実施例に係るレーザー描画システム1を示したブロック図である。
【0013】
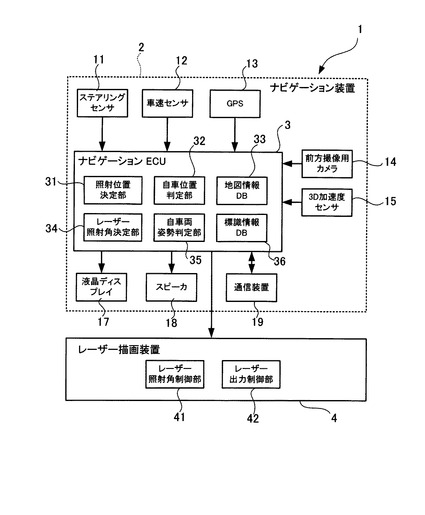
図1に示すように、本実施例に係るレーザー描画システム1は、ナビゲーション装置2と、このナビゲーション装置2に対して電気的に接続されたレーザー描画装置4を基本にして構成され、各制御装置に対して所定の周辺機器が接続されている。
また、ナビゲーション装置2は、車両の室内のセンターコンソール又はパネル面に備え付けられ、液晶ディスプレイ17に地図や目的地までの探索経路を表示すると共に、スピーカ18によって経路案内に関する音声ガイダンスを出力する。また、ナビゲーション装置2は、所定の条件を満たした場合には、レーザー描画装置4に制御信号を送信して進行方向前方の道路上に設けられた交差点における各分岐方向の行く先を示す方面標識に、自車両の進行方向に合致する方面名称等を指し示す所定照射形状のマークを描画する等のレーザー描画処理を行う。また、レーザー描画装置4は、自車両のフロントグリルの車幅方向中央部から視認可能なレーザー光を前方路面上又は前方の道路標識上に照射方向又は照射範囲又は照射光量又は色彩等を変更して照射することが可能に構成されている。
【0014】
次に、ナビゲーション装置2を構成する各構成要素について説明する。
ナビゲーション装置2は、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU(Electronic Control Unit)3と、ステアリングセンサ11と、GPS13と、3D加速度センサ15と、車両室内のセンターコンソール又はパネル面に備え付けられ、地図や目的地までの探索経路を表示する液晶ディスプレイ17と、経路案内等に関する音声ガイダンスを出力するスピーカ18と、道路交通情報センタ(VICS(登録商標):Vehicle Information and Communication System)等の情報センタとの間で通信を行う通信装置19と、から構成されている。また、ナビゲーションECU3には、自車両の走行速度を検出する車速センサ12、ルームミラー付近に固定されたCCD(ステレオ)カメラ等の画像処理により進行方向前方の道路上に設けられた方面標識との相対位置・方面標識の高さ・方面標識上の交差点の各進行方向の方面名称等を検出するための前方撮像用カメラ14、及び、レーザ描画装置4が接続されている。
【0015】
このナビゲーションECU3は、通常の経路探索及び経路案内の処理の他に、後述のように、進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークに視認可能なレーザー光で所定照射形状のマークを描画するレーザー描画処理等を行う電子制御ユニットである。尚、ナビゲーションECU3の詳細な構成については後述する。
また、ナビゲーションECU3は、ステアリングセンサ11、GPS13、3D加速度センサ15等によって現在の自車両の位置(以下、「自車位置」という。)、方位、所定地点からの走行距離等を検出することが可能となっている。
【0016】
具体的には、ステアリングセンサ11は自車両の舵(だ)角を検出する。ここで、ステアリングセンサ11としては、例えば、ステアリングホイール(図示せず)の回転部に取り付けられた光学的な回転センサ、回転抵抗センサ、車輪に取り付けられた角度センサ等が使用される。また、GPS13は、人工衛星によって発生させられた電波を受信することにより、地球上における自車両の現在地及び現在時刻を検出することによって自車方位を検出する。そして、3D加速度センサ15は、自車両の3軸方向の加速度を検出する。また、3D加速度センサ15によって検出された加速度を積分することにより、3軸方向の自車速度、自車両の移動距離を検出することができる。
【0017】
また、ナビゲーションECU3は、ナビゲーション装置2の全体の制御を行う演算装置及び制御装置としてのCPUの他に、CPUが各種の演算処理を行うに当たってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAMや、制御用のプログラムのほか、目的地までの経路の探索、探索した誘導経路から各案内交差点での右折・左折・直進等の進行方向を決定して案内する経路案内処理プログラム、後述の進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークに視認可能なレーザー光で所定照射形状のマークを描画するレーザー描画処理プログラム(図2参照)等が記録されたROM等の内部記憶装置を備えている。尚、前記RAM、ROM等としては半導体メモリ、磁気コア等が使用される。そして、演算装置及び制御装置としては、CPUに代えてMPU等を使用することも可能である。
【0018】
また、ナビゲーションECU3には、照射位置決定部31、自車位置判定部32、地図情報DB33、レーザー照射角決定部34、自車両姿勢判定部35、標識情報DB36を備え、ステアリングセンサ11、車速センサ12、GPS13、前方撮像用カメラ14、3D加速度センサ15等から取得した情報に基づいて各種制御を行う。
【0019】
ここで、照射位置決定部31は、標識情報DB36に格納されている方面標識の各進行方向を示す矢印マークや各進行方向の方面名称と、前方撮像用カメラ14による方面標識との相対位置・方面標識の高さ・方面標識上の交差点の各進行方向の方面名称等の画像認識データとに基づいて、自車両が接近する交差点の進行方向に合致する方面名称や矢印マークを選択して、方面標識上の方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して決定する。
また、自車位置判定部32は、ステアリングセンサ11、車速センサ12、GPS13、3D加速度センサ15から取得される各情報に基づいて、自車両の現在の絶対位置(緯度・経度)を検出する。
【0020】
また、地図情報DB33は、経路案内及び地図表示に必要な各種情報から構成されており、例えば、各新設道路を特定するための新設道路情報、地図を表示するための地図表示データ、各交差点に関する交差点データ、ノード点に関するノードデータ、施設の一種である道路(リンク)に関するリンクデータ、経路を探索するための探索データ、施設の一種である店舗等のPOI(Point of Interest)に関する店舗データ、交差点の手前の道路上に設けられる方面標識の位置座標や方面標識の識別コード等に関する方面標識データ、地点を検索するための検索データ等から構成されている。また、地図情報DB33の内容は、不図示の地図情報配信センタから通信装置19を介して配信された更新情報をダウンロードすることによって更新される。
【0021】
また、レーザー照射角決定部34は、照射位置決定部31により決定された方面標識上の自車両が接近する交差点での進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置と、自車位置判定部32により判定された交差点での自車両の座標位置データと、自車両姿勢判定部35により判定された交差点での自車両の向きを表す方位情報とに基づいて所定照射形状のマークを方面標識上に描画するレーザ照射角度を算出して決定する。
また、自車両姿勢判定部35は、ステアリングセンサ11、車速センサ12、GPS13、3D加速度センサ15から取得される各情報に基づいて、自車両の現在の方位角度等を検出する。
【0022】
更に、標識情報DB36は、各方面標識の識別コード、各方面標識から行き先方向を示す交差点までの距離、各方面標識の地図上での絶対位置座標(例えば、緯度・経度である。)、各方面標識の地上からの高さ情報(進行方向情報)、各方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称(進行方向情報)、各方面標識に表示されている交差点から進行する各進行方向を表す矢印マーク(進行方向情報)等に関する各方面標識に対応する標識情報から構成されている。
例えば、標識情報DB36には、各方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称(進行方向情報)として、「左折は渋谷」、「直進は新宿」、「右折は上野」等が格納されると共に、各方面名称「渋谷」、「新宿」、「上野」の表示されている方面標識上の位置情報等(進行方向情報)も格納されている。また、標識情報DB36には、「左矢印」、「直進矢印」、「右矢印」(進行方向情報)等が格納されると共に、各矢印マークの方面標識上の位置情報(進行方向情報)等も格納されている。
【0023】
ここで、特に地図表示データとしては、10km×10kmで区画された2次メッシュをベースに4分割(長さ1/2)、16分割(1/4)、64分割(1/8)されたユニットで構成されており、各ユニットのデータ量が略同レベルになるように、各地のユニットが設定されている。最も小さい64分割サイズのユニットは、約1.25km四方の大きさである。
【0024】
また、ノードデータとしては、実際の道路の分岐点(交差点、T字路等も含む)、各道路に曲率半径等に応じて所定の距離ごとに設定されたノード点の座標(位置)、ノードが交差点に対応するノードであるか等を表すノード属性、ノードに接続するリンクの識別番号であるリンクIDのリストである接続リンク番号リスト、ノードにリンクを介して隣接するノードのノード番号のリストである隣接ノード番号リスト、各ノード点の高さ(高度)等に関するデータ等が記録される。
【0025】
また、リンクデータとしては、道路を構成する各リンクに関してリンクの属する道路の幅員、勾(こう)配、カント、バンク、路面の状態、道路の車線数、車線数の減少する箇所、幅員の狭くなる箇所、踏切り等を表すデータが、コーナに関して、曲率半径、交差点、T字路、コーナの入口及び出口等を表すデータが、道路属性に関して、降坂路、登坂路等を表すデータが、道路種別に関して、国道、県道、細街路等の一般道のほか、高速自動車国道、都市高速道路、一般有料道路、有料橋等の有料道路を表すデータがそれぞれ記録される。更に、有料道路に関して、有料道路の入口及び出口の取付道(ランプウェイ)、料金所(インターチェンジ)等に関するデータが記録される。
【0026】
また、探索データとしては、設定された目的地までの経路を探索及び表示する際に使用されるデータについて記録されており、ノードを通過する際のコスト(以下、ノードコストという)や道路を構成するリンクのコスト(以下、リンクコストという)からなる探索コストを算出する為に使用するコストデータ、経路探索により選択された誘導経路を液晶ディスプレイ17の地図上に表示するための経路表示データ等から構成されている。
【0027】
また、店舗データとしては、各地域のホテル、病院、ガソリンの給油所、駐車場、観光施設等のPOIに関するデータがPOIを特定するIDとともに記録される。なお、前記地図情報DB33には、所定の情報をナビゲーション装置2のスピーカ18によって出力するための音声出力データも記録される。
【0028】
また、液晶ディスプレイ17には、操作案内、操作メニュー、キーの案内、現在地から目的地までの誘導経路、誘導経路に沿った案内情報、交通情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。尚、液晶ディスプレイ17の代わりに、CRTディスプレイ、プラズマディスプレイ等を使用したり、車両のフロントガラスにホログラムを投影するホログラム装置等を使用することも可能である。
【0029】
また、スピーカ18は、ナビゲーションECU3からの指示に基づいて、誘導経路に沿った走行を案内する音声ガイダンスを出力する。ここで、案内される音声ガイダンスとしては、例えば、「300m先に方面標識があります。」、「200m先、○○交差点を左方向です。」等がある。なお、スピーカ18より出力される音声としては、合成された音声のほかに、各種効果音、予めテープやメモリ等に録音された各種の案内情報を出力することもできる。
【0030】
そして、通信装置19は、地図情報配信センタと通信を行う通信手段であり、地図情報配信センタとの間で最もバージョンの新しい更新地図情報等の送受信を行う。また、地図情報配信センタに加えて、例えば、道路交通情報センタ(VICS)等から送信された渋滞情報、交通規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況等の各情報から成る道路交通情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信する。また、通信装置17はLAN、WAN、イントラネット、携帯電話回線網、電話回線網、公衆通信回線網、専用通信回線網、インターネット等の通信回線網等の通信系において通信を可能とするネットワーク機器である。更に、通信装置19は道路交通情報センタ(VICS)からの情報の他に、ニュース、天気予報等の情報から成るFM多重情報を、FM放送局を介してFM多重放送として受信するFM受信機を備える。尚、前記ビーコンレシーバ及びFM受信機は、ユニット化されてVICSレシーバとして配設されるようになっているが、別々に配設することもできる。
【0031】
また、レーザー描画装置4には、ナビゲーションECU3から送信されるレーザ照射角度情報に基づいて所定照射形状を描画するためにレーザー光の照射角度を制御するレーザー照射角度制御部41と、ナビゲーションECU3から送信される方面標識上に描画するマークの色彩データ等に基づいてレーザー光の出力を制御するレーザー出力制御部42が設けられている。
【0032】
次に、上記のように構成されたレーザー描画システム1のナビゲーションECU3が実行する進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを視認可能なレーザー光で描画するレーザー描画処理について図2乃至図6に基づき説明する。
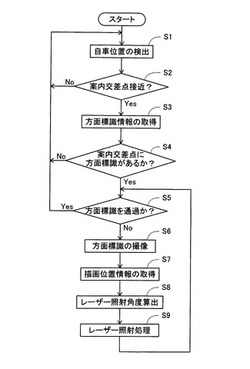
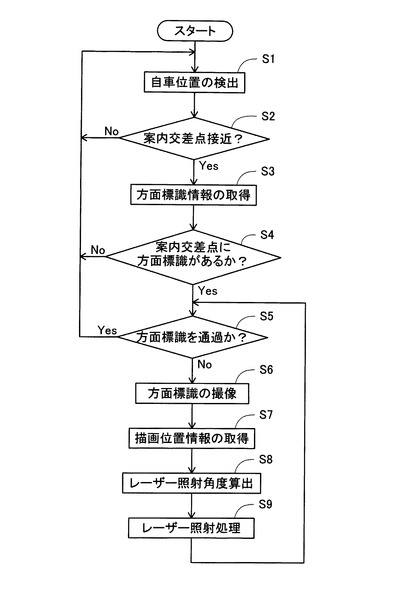
図2はナビゲーションECU3が実行する進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを視認可能なレーザー光で描画するレーザー描画処理を示すフローチャートである。図3は自車両が道路上に設けられる方面標識の手前に来た状態を説明するための図である。図4は自車両が接近する方面標識において、交差点での進行方向に合致する方面名称を指し示す所定照射形状のマークを描画した一例を説明するための図である。図5は図4の方面標識の方面名称に所定照射形状のマークを描画した一例を示す拡大図である。図6は自車両が方面標識を通過した状態を説明するための図である。尚、図2にフローチャートで示されるプログラムは、ナビゲーションECU3が備えているRAMやROMに記憶されており、CPUにより実行される。
【0033】
図2に示すように、先ず、ステップ(以下、Sと略記する)1において、ナビゲーションECU3は、自車位置判定部32及び自車両姿勢判定部35により自車位置及び自車の向きを表す自車方位を検出して、自車位置を表す座標データ(例えば、緯度と経度のデータである。)と自車方位をRAM42に記憶する。そして、ナビゲーションECU3は、地図情報DB33から案内経路上における、自車両の進行方向前方にある交差点に関する交差点データを読み出し、RAMに記憶する。
続いて、S2において、ナビゲーションECU3は、自車位置を表す座標データと交差点データとをRAMから再度読み出し、自車両が交差点から所定距離以内(例えば、約200m〜500m以内である。)に接近したか否かを判定する判定処理を実行する。そして、自車両が交差点から所定距離以内に接近していない場合には(S2:NO)、ナビゲーションECU3は、再度、S1以降の処理を実行する。
【0034】
一方、自車両が交差点から所定距離以内(例えば、約200m〜500m以内である。)に接近した場合には(S2:YES)、ナビゲーションECU3は、S3の処理に移行する。S3において、ナビゲーションECU3は、地図情報DB33から自車両が接近する交差点の手前の道路上に設けられる方面標識の位置座標や方面標識の識別コード等に関する方面標識データを読み出す。そして、ナビゲーションECU3は、標識情報DB36からこの方面標識の識別コードに対応する方面標識の地図上での絶対位置座標(例えば、緯度・経度である。)、該方面標識の地上からの高さ情報、該方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称、該方面標識に表示されている交差点から進行する各進行方向を表す矢印マーク等に関する標識情報を読み出して、RAMに記憶する。また、ナビゲーションECU3は、標識情報DB36からこの方面標識の識別コードに対応する方面標識に関する標識情報を読み出してRAMに記憶した場合には、RAMから「方面標識フラグ」を読み出してONに設定する、即ち方面標識フラグに「1」を代入してRAMに再度、記憶する。
【0035】
尚、ナビゲーションECU3は、標識情報DB36からこの方面標識の識別コードに対応する方面標識に関する各種情報を読み出してRAMに記憶しなかった場合には、RAMから「方面標識フラグ」を読み出してOFFに設定する、即ち方面標識フラグに「0」を代入してRAMに再度、記憶する。ここで、エンジン始動時には、方面標識フラグはOFFに設定されている、即ち、方面標識フラグには「0」が代入されて、RAMに記憶されている。
【0036】
続いて、S4において、ナビゲーションECU3は、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報を読み出してRAMに記憶したか否か、即ち、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報が標識情報DB36に格納されていたか否かを判定する判定処理を実行する。具体的には、ナビゲーションECU3は、RAMから方面標識フラグを読み出し、この方面標識フラグがONか否か、即ち「1」か否かを判定する判定処理を実行する。そして、RAMから読み出した方面標識フラグがOFF、即ち「0」の場合には、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報が標識情報DB36に格納されていなかったと判定して(S4:NO)、ナビゲーションECU3は、再度、S1以降の処理を実行する。
【0037】
一方、RAMから読み出した方面標識フラグがON、即ち「1」の場合には、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報が標識情報DB36に格納されていたと判定して(S4:YES)、ナビゲーションECU3は、S5の処理に移行する。S5において、ナビゲーションECU3は、自車位置判定部32及び自車両姿勢判定部35により自車位置及び自車の向きを表す自車方位を検出して、自車位置を表す座標データ(例えば、緯度と経度のデータである。)と自車方位をRAMに記憶する。そして、ナビゲーションECU3は、この自車位置を表す座標データと上記S3の処理においてRAMに記憶した方面標識の地図上での絶対位置座標(例えば、緯度・経度である。)とを読み出し、自車両がこの方面標識を通過したか否かを判定する判定処理を実行する。
そして、自車両がこの方面標識を通過したと判定した場合には(S5:YES)、ナビゲーションECU3は、レーザー描画装置4に対してレーザー出力を停止させる制御信号を出力して、方面標識上に描画している所定照射形状のマークの描画を終了した後、再度、S1以降の処理を実行する。
【0038】
また一方、自車両がこの方面標識を通過していないと判定した場合には(S5:NO)、ナビゲーションECU3は、S6の処理に移行する。S6において、ナビゲーションECU3は、ルームミラー付近に固定されたCCD(ステレオ)カメラ等により構成される前方撮像用カメラ14による自車両前方の撮像画像から、この撮像画像内の自車両が接近する交差点の手前の道路上に設けられる方面標識を画像処理により認識する。また、この際に、ナビゲーションECU3は、自車位置を表す座標データと上記S3の処理においてRAMに記憶した方面標識の地図上での絶対位置座標、方面標識の地上からの高さ情報等の標識情報を再度RAMから読み出して、前方撮像用カメラ14の撮像画像内の方面標識を認識する範囲を決定して、方面標識を画像処理により認識する。また、ナビゲーションECU3は、上記S3の処理においてRAMに記憶した該方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称、該方面標識に表示されている交差点から進行する各進行方向を表す矢印マーク等に関する標識情報に基づいて、経路案内処理プログラムによって決定される案内経路上における各交差点の進行方向から自車両が接近する交差点の進行方向に合致する方面名称や矢印マークを選択する。そして、この選択した方面名称や矢印マークを前方撮像用カメラ14の撮像画像内の方面標識からパターンマッチング等により抽出して認識する。
【0039】
続いて、S7において、ナビゲーションECU3は、照射位置決定部31を介して前方撮像用カメラ14の撮像画像内の画像処理によって認識した該撮像画像内の方面標識上における自車両の進行方向に合致する方面名称や矢印マークの撮像位置と、自車両のルームミラー付近に固定された前方撮像用カメラ14の設置高さ等のカメラ設置パラメータとから、この方面標識上における自車両が接近する交差点の進行方向に合致する方面名称や矢印マークと自車両との正確な相対位置関係(例えば、相対距離、相対角度等である。)を算出して、この方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して、RAMに記憶する。
【0040】
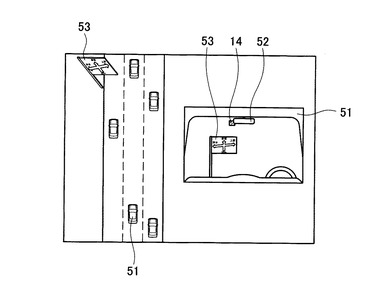
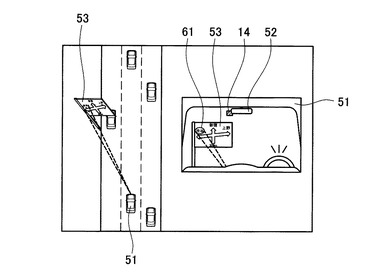
例えば、図3に示すように、上記S6の処理で、ナビゲーションECU3は、上記S3の処理においてRAMに記憶した方面標識53の地図上での絶対位置座標、方面標識53の地上からの高さ情報等の標識情報を再度RAMから読み出して、自車両51のルームミラー52付近に固定された前方撮像用カメラ14の撮像画像内の方面標識53を認識する範囲を決定し、この前方撮像用カメラ14の撮像画像から自車両51が接近する方面標識53を画像処理により認識する。また、ナビゲーションECU3は、上記S3の処理においてRAMに記憶した方面標識53に関する標識情報から「左折は渋谷」、「直進は新宿」、「右折は上野」を読み出し、経路案内処理プログラムによって決定される案内経路上における交差点58(図6参照)での進行方向が「左折」であることから、標識情報「左折は渋谷」に対応する該撮像画像内の方面標識53上の「渋谷」の方面名称54Aをパターンマッチング等により抽出して認識する。そして、上記S7の処理で、ナビゲーションECU3は、方面名称54Aの撮像位置と、自車両51のルームミラー52付近に固定された前方撮像用カメラ14の設置高さ等のカメラ設置パラメータとから、この方面名称54Aと自車両51との正確な相対位置関係(例えば、相対距離、相対角度等である。)を算出して、この方面名称54Aを指し示す横長楕円形のマーク61(図5参照)を描画する描画目標位置の座標データを算出して、RAMに記憶する。
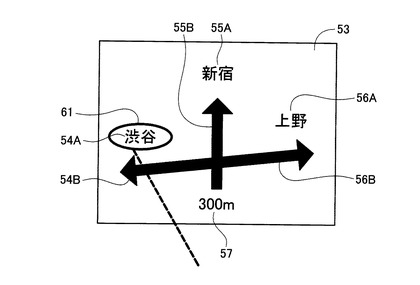
尚、図5に示すように、方面標識53上には、左折を示す矢印マーク54Bの上側に「渋谷」の方面名称54Aが表示されている。また、方面標識53上には、直進を示す矢印マーク55Bの上側に「新宿」の方面名称55Aが表示されている。また、方面標識53上には、右折を示す矢印マーク56Bの上側に「上野」の方面名称56Aが表示されている。また、直進を示す矢印マーク55Bの下側に交差点58(図6参照)までの距離を示す「300m」の距離情報57が表示されている。
【0041】
そして、S8において、ナビゲーションECU3は、方面標識上の自車両が接近する交差点での進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データと、自車位置判定部32により判定された自車両の座標位置データと、自車両姿勢判定部35により判定された自車両の向きを表す方位情報とをRAMから再度読み出して、レーザー照射角決定部34によりレーザー光を照射して方面標識上の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを描画するレーザ照射角度を算出して、レーザー照射角度情報としてRAMに記憶する。
続いて、S9において、ナビゲーションECU3は、RAMから再度、レーザー照射角度情報を読み出すと共に、方面標識上に描画する所定照射形状のマークの色彩データ(例えば、緑色である。)等をROMから読み出し、レーザー描画装置4に対して送信後、再度、S5以降の処理を実行する。これにより、レーザー描画装置4は、レーザー照射角度情報に基づいてレーザー照射角度制御部41によりレーザー光の照射角度を制御すると共に、方面標識上に描画する所定照射形状のマークの色彩データ等に基づいてレーザー出力制御部42により視認可能な所定の色のレーザー光を方面標識上の進行方向に合致する方面名称や矢印マークに照射して、所定照射形状のマークを描画する。
【0042】
例えば、図4及び図5に示すように、上記S8の処理において、ナビゲーションECU3は、方面標識53上の自車両51が接近する交差点58(図6参照)での進行方向に合致する「渋谷」の方面名称54Aを指し示す横長楕円形のマーク61を描画する描画目標位置の座標データと、自車位置と自車方位とから、レーザー照射角決定部34によりレーザー光を照射して「渋谷」の方面名称54Aの周囲に横長楕円形のマーク61を描画するためのレーザ照射角度を算出して、レーザー照射角度情報としてRAMに記憶する。そして、上記S9の処理において、ナビゲーションECU3は、RAMから再度、レーザー照射角度情報を読み出すと共に、横長楕円形のマーク61の色彩データ(例えば、緑色である。)等をROMから読み出し、レーザー描画装置4に対して送信し、該方面標識53上の「渋谷」の方面名称54Aの周囲に緑色等の視認可能なレーザー光で横長楕円形のマーク61を描画する。これにより、運転者は、方面標識53上の「渋谷」の方面名称54Aが緑色等の視認可能なレーザー光で描画された横長楕円形のマーク61で囲まれたのを見て、自車両51が「渋谷」方面に左折すべきことを一目瞭然に認識することができる。
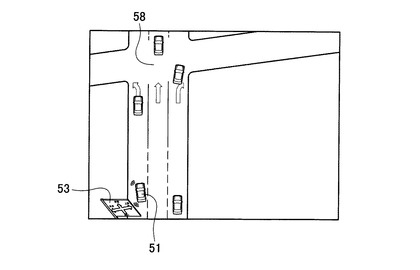
その後、図6に示すように、ナビゲーションECU3は、自車両51がこの方面標識53を通過したと判定した場合には、レーザー描画装置4の出力を停止して、方面標識53上に描画している横長楕円形のマーク61の描画を自動的に終了する。また、自車両51の運転者は、交差点58の手前で、前方から目を逸らすことなく左側に車線変更して、この交差点58に進入し、「渋谷」方面に安全に左折することができる。
【0043】
ここで、自車位置判定部32、自車両姿勢判定部35は、自車位置検出手段を構成する。また、地図情報DB33は、地図情報記憶手段として機能する。また、標識情報DB36は、標識情報記憶手段として機能する。また、ナビゲーションECU3、地図情報DB33は、経路探索手段を構成する。また、ナビゲーションECU3、自車位置判定部32、地図情報DB33、自車両姿勢判定部35は、交差点接近検出手段を構成する。また、ナビゲーションECU3、標識情報DB36は、標識情報取得手段、進行方向情報選択手段を構成する。また、ナビゲーションECU3、前方用撮像カメラ14は、認識手段を構成する。また、ナビゲーションECU3、照射位置決定部31は、相対位置算出手段を構成する。また、ナビゲーションECU3、照射位置決定部31、レーザー照射角決定部34、レーザー描画装置4は、描画手段を構成する。
【0044】
以上詳細に説明した通り、本実施例に係るレーザー描画システム1では、自車両が探索された経路上の交差点に関する方面標識に接近した場合には、自車両の前方を撮像する前方撮像用カメラ14により撮像画像内の方面標識が認識されて、この方面標識上の自車両の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークが視認可能なレーザー光で描画されるため、運転者は、前方の方面標識上に描画された所定照射形状のマークに基づいて、進路変更をすることが可能となり、前方から目を逸らす必要がなく、また、スピーカ18を介した方面標識の案内の案内内容を理解するまでもなく、一目瞭然でこの方面標識に関する交差点での進行方向を知ることが可能となる。
また、ナビゲーションECU3は、撮像情報DB36に格納される方面標識の地上からの高さ情報等に基づいて、前方撮像用カメラ14による撮像画像内の方面標識を認識する範囲を決定するため、方面標識の認識処理の高速化を図ることができ、自車両と方面標識との相対位置をより正確に算出することが可能となる。
【0045】
尚、本発明は前記実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、前記実施例では、方面標識上の方面名称や矢印マークに所定照射形状のマークを視認可能なレーザー光で描画したが、方面名称の文字や矢印マークの形に合わせた照射形状で、この方面名称の文字や矢印マークに重なるように視認可能なレーザー光を照射するようにしてもよい。これにより、進行方向に合致する方面名称の文字や矢印マークがレーザー光により光るため、運転者は進行方向前方の方面標識上で光っている方面名称の文字や矢印マークから接近する交差点での進行方向を容易に認識することができる。また、レーザー光を間欠照射することにより、方面標識上で光っている方面名称の文字が点滅するため、運転者は接近する交差点での進行方向を更に容易に認識することが可能となる。
また、所定照射形状のマークとしては、上記のように方面名称や矢印マークを囲むように描画される横長楕円形等のマークだけでなく、レーザー光を一点に対して照射した際に描画される描画点を用いても良く、このような描画点も本願発明に係る所定形状のマークに含まれる。
【図面の簡単な説明】
【0046】
【図1】本実施例に係るレーザー描画システムを示すブロック図である。
【図2】ナビゲーションECUが実行するレーザー描画処理を示すフローチャートである。
【図3】自車両が道路上に設けられる方面標識の手前に来た状態を説明するための図である。
【図4】自車両が接近する方面標識において、交差点での進行方向に合致する方面名称を指し示す所定照射形状のマークを描画した一例を説明するための図である。
【図5】図4の方面標識の方面名称に所定照射形状のマークを描画した一例を示す拡大図である。
【図6】自車両が方面標識を通過した状態を説明するための図である。
【符号の説明】
【0047】
1 レーザー描画システム
2 ナビゲーション装置
3 ナビゲーションECU
4 レーザー描画装置
11 ステアリングセンサ
12 車速センサ
13 GPS
14 前方撮像用カメラ
15 3D加速度センサ
31 照射位置決定部
32 自車位置判定部
33 地図情報DB
34 レーザー照射角決定部
35 自車両姿勢判定部
48 標識情報DB
【技術分野】
【0001】
本発明は、車両に搭載されて道路上に設けられる方面標識に所定形状のマークを描画して交差点での進行方向を案内する描画システムに関するものである。
【背景技術】
【0002】
従来より、車両に搭載されて道路上に設けられる方面標識の案内を行う装置が種々提案されている。
例えば、車両が交差点における各分岐方向の行く先を示す方面標識に接近した場合に、表示画面に方面標識を表示し、また、音声による案内で案内経路に方面標識が存在することを運転者に知らせるナビゲーション装置がある(例えば、特許文献1参照。)。
【特許文献1】特開平11−337359号公報(段落(0007)〜(0041)、図1〜図29)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記した特許文献1に記載されたナビゲーション装置では、表示画面に方面標識を表示した場合には、運転者は前方から目を逸らす必要があり、また、音声による案内では案内内容を聞いて、理解する必要があるという問題がある。
【0004】
そこで、本発明は、上述した問題点を解決するためになされたものであり、運転者が前方から目を逸らす必要がなく、また、音声による案内の内容を理解するまでもなく、一目瞭然で方面標識に関する交差点での進行方向を知ることが可能となる描画システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため請求項1に係る描画システムは、自車位置を検出する自車位置検出手段(32、11、12、13、15)と、交差点の位置情報を含む地図情報を記憶する地図情報記憶手段(33)と、道路上に設けられる方面標識の位置情報と進行方向に関する進行方向情報とを含む標識情報を記憶する標識情報記憶手段(36)と、目的地までの経路を探索する経路探索手段(3、33)と、前記自車位置と前記地図情報とに基づいて前記経路上の交差点への接近を検出する交差点接近検出手段(3、32、33)と、前記交差点接近検出手段の検出結果に基づいて自車両が接近する交差点に関する前記標識情報を取得する標識情報取得手段(3、36)と、自車両の前方を撮像する撮像手段(14)と、前記交差点接近検出手段の検出結果に基づいて前記撮像手段による撮像画像内の方面標識を認識する認識手段(3)と、前記認識手段による認識結果に基づいて自車両と前記方面標識との相対位置を算出する相対位置算出手段(3)と、前記経路に基づいて前記標識情報取得手段によって取得された標識情報から自車両が接近する交差点での進行方向に合致する進行方向情報を選択する進行方向情報選択手段(3)と、前記相対位置算出手段によって算出した自車両と前記方面標識との相対位置に基づいて前記進行方向情報選択手段によって選択された進行方向情報を指し示す所定形状のマークを道路上に設けられる方面標識上に描画する描画手段(3、31、34、4)と、を備えたことを特徴とする。
【0006】
また、請求項2に係る描画システムは、請求項1に記載の描画システム(1)において、前記標識情報は、前記方面標識の高さ情報を含み、前記認識手段(3)は、前記高さ情報に基づいて前記撮像画像内の方面標識を認識する範囲を決定することを特徴とする。
【0007】
更に、請求項3に係る描画システムは、請求項1又は請求項2に記載の描画システム(1)において、前記進行方向情報は、前記交差点から進行する各進行方向と該各進行方向に対応する各方面名称とを含むことを特徴とする。
【発明の効果】
【0008】
前記構成を有する請求項1に係る描画システムでは、自車位置と地図情報とに基づいて、探索した目的地までの経路上における交差点への接近を検出する。また、道路上に設けられる方面標識の位置情報と進行方向に関する進行方向情報とを含む標識情報を記憶しており、探索した経路上における交差点への接近を検出した場合には、該交差点に関する標識情報を取得する。そして、探索した経路に基づいて、この取得した標識情報から自車両が接近する交差点での進行方向に合致する進行方向情報を選択する。また、探索した経路上における交差点への接近を検出した場合には、自車両の前方を撮像する撮像手段により撮像画像内の方面標識を認識して、自車両と前方の方面標識との相対位置を算出する。そして、この算出した自車両と方面標識との相対位置に基づいて、この方面標識上に、交差点に関する標識情報から選択した進行方向情報を指し示す所定形状のマークを描画する。
これにより、自車両が探索された経路上の交差点に関する方面標識に接近した場合には、自車両の前方を撮像する撮像手段により撮像画像内の方面標識が認識されて、この方面標識上の自車両の進行方向に合致する進行方向情報を指し示す所定形状のマークが描画されるため、運転者は、前方の方面標識上に描画された所定形状のマークに基づいて、進路変更をすることが可能となり、前方から目を逸らす必要がなく、一目瞭然でこの方面標識に関する交差点での進行方向を知ることが可能となる。
【0009】
また、請求項2に係る描画システムでは、撮像手段による撮像画像内の方面標識を認識する認識手段は、標識情報に含まれる方面標識の高さ情報に基づいて、この撮像画像内の方面標識を認識する範囲を決定するため、方面標識の認識処理の高速化を図ることができ、自車両と方面標識との相対位置をより正確に算出することが可能となる。
【0010】
更に、請求項3に係る描画システムでは、進行方向情報には、交差点から進行する各進行方向と該各進行方向に対応する各方面名称とが含まれるため、方面標識上に表示される各方面名称から、自車両の進行方向に合致する方面名称を選択して、所定形状のマークで指し示すことが可能となり、運転者は、前方から目を逸らすことなく、この方面標識に関する交差点での進行方向を更に容易に知ることが可能となる。
【発明を実施するための最良の形態】
【0011】
以下、本発明に係る描画システムをレーザー描画システムについて具体化した一実施例に基づき図面を参照しつつ詳細に説明する。
【実施例】
【0012】
先ず、本実施例に係るレーザー描画システムの概略構成について図1に基づいて説明する。図1は本実施例に係るレーザー描画システム1を示したブロック図である。
【0013】
図1に示すように、本実施例に係るレーザー描画システム1は、ナビゲーション装置2と、このナビゲーション装置2に対して電気的に接続されたレーザー描画装置4を基本にして構成され、各制御装置に対して所定の周辺機器が接続されている。
また、ナビゲーション装置2は、車両の室内のセンターコンソール又はパネル面に備え付けられ、液晶ディスプレイ17に地図や目的地までの探索経路を表示すると共に、スピーカ18によって経路案内に関する音声ガイダンスを出力する。また、ナビゲーション装置2は、所定の条件を満たした場合には、レーザー描画装置4に制御信号を送信して進行方向前方の道路上に設けられた交差点における各分岐方向の行く先を示す方面標識に、自車両の進行方向に合致する方面名称等を指し示す所定照射形状のマークを描画する等のレーザー描画処理を行う。また、レーザー描画装置4は、自車両のフロントグリルの車幅方向中央部から視認可能なレーザー光を前方路面上又は前方の道路標識上に照射方向又は照射範囲又は照射光量又は色彩等を変更して照射することが可能に構成されている。
【0014】
次に、ナビゲーション装置2を構成する各構成要素について説明する。
ナビゲーション装置2は、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU(Electronic Control Unit)3と、ステアリングセンサ11と、GPS13と、3D加速度センサ15と、車両室内のセンターコンソール又はパネル面に備え付けられ、地図や目的地までの探索経路を表示する液晶ディスプレイ17と、経路案内等に関する音声ガイダンスを出力するスピーカ18と、道路交通情報センタ(VICS(登録商標):Vehicle Information and Communication System)等の情報センタとの間で通信を行う通信装置19と、から構成されている。また、ナビゲーションECU3には、自車両の走行速度を検出する車速センサ12、ルームミラー付近に固定されたCCD(ステレオ)カメラ等の画像処理により進行方向前方の道路上に設けられた方面標識との相対位置・方面標識の高さ・方面標識上の交差点の各進行方向の方面名称等を検出するための前方撮像用カメラ14、及び、レーザ描画装置4が接続されている。
【0015】
このナビゲーションECU3は、通常の経路探索及び経路案内の処理の他に、後述のように、進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークに視認可能なレーザー光で所定照射形状のマークを描画するレーザー描画処理等を行う電子制御ユニットである。尚、ナビゲーションECU3の詳細な構成については後述する。
また、ナビゲーションECU3は、ステアリングセンサ11、GPS13、3D加速度センサ15等によって現在の自車両の位置(以下、「自車位置」という。)、方位、所定地点からの走行距離等を検出することが可能となっている。
【0016】
具体的には、ステアリングセンサ11は自車両の舵(だ)角を検出する。ここで、ステアリングセンサ11としては、例えば、ステアリングホイール(図示せず)の回転部に取り付けられた光学的な回転センサ、回転抵抗センサ、車輪に取り付けられた角度センサ等が使用される。また、GPS13は、人工衛星によって発生させられた電波を受信することにより、地球上における自車両の現在地及び現在時刻を検出することによって自車方位を検出する。そして、3D加速度センサ15は、自車両の3軸方向の加速度を検出する。また、3D加速度センサ15によって検出された加速度を積分することにより、3軸方向の自車速度、自車両の移動距離を検出することができる。
【0017】
また、ナビゲーションECU3は、ナビゲーション装置2の全体の制御を行う演算装置及び制御装置としてのCPUの他に、CPUが各種の演算処理を行うに当たってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAMや、制御用のプログラムのほか、目的地までの経路の探索、探索した誘導経路から各案内交差点での右折・左折・直進等の進行方向を決定して案内する経路案内処理プログラム、後述の進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークに視認可能なレーザー光で所定照射形状のマークを描画するレーザー描画処理プログラム(図2参照)等が記録されたROM等の内部記憶装置を備えている。尚、前記RAM、ROM等としては半導体メモリ、磁気コア等が使用される。そして、演算装置及び制御装置としては、CPUに代えてMPU等を使用することも可能である。
【0018】
また、ナビゲーションECU3には、照射位置決定部31、自車位置判定部32、地図情報DB33、レーザー照射角決定部34、自車両姿勢判定部35、標識情報DB36を備え、ステアリングセンサ11、車速センサ12、GPS13、前方撮像用カメラ14、3D加速度センサ15等から取得した情報に基づいて各種制御を行う。
【0019】
ここで、照射位置決定部31は、標識情報DB36に格納されている方面標識の各進行方向を示す矢印マークや各進行方向の方面名称と、前方撮像用カメラ14による方面標識との相対位置・方面標識の高さ・方面標識上の交差点の各進行方向の方面名称等の画像認識データとに基づいて、自車両が接近する交差点の進行方向に合致する方面名称や矢印マークを選択して、方面標識上の方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して決定する。
また、自車位置判定部32は、ステアリングセンサ11、車速センサ12、GPS13、3D加速度センサ15から取得される各情報に基づいて、自車両の現在の絶対位置(緯度・経度)を検出する。
【0020】
また、地図情報DB33は、経路案内及び地図表示に必要な各種情報から構成されており、例えば、各新設道路を特定するための新設道路情報、地図を表示するための地図表示データ、各交差点に関する交差点データ、ノード点に関するノードデータ、施設の一種である道路(リンク)に関するリンクデータ、経路を探索するための探索データ、施設の一種である店舗等のPOI(Point of Interest)に関する店舗データ、交差点の手前の道路上に設けられる方面標識の位置座標や方面標識の識別コード等に関する方面標識データ、地点を検索するための検索データ等から構成されている。また、地図情報DB33の内容は、不図示の地図情報配信センタから通信装置19を介して配信された更新情報をダウンロードすることによって更新される。
【0021】
また、レーザー照射角決定部34は、照射位置決定部31により決定された方面標識上の自車両が接近する交差点での進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置と、自車位置判定部32により判定された交差点での自車両の座標位置データと、自車両姿勢判定部35により判定された交差点での自車両の向きを表す方位情報とに基づいて所定照射形状のマークを方面標識上に描画するレーザ照射角度を算出して決定する。
また、自車両姿勢判定部35は、ステアリングセンサ11、車速センサ12、GPS13、3D加速度センサ15から取得される各情報に基づいて、自車両の現在の方位角度等を検出する。
【0022】
更に、標識情報DB36は、各方面標識の識別コード、各方面標識から行き先方向を示す交差点までの距離、各方面標識の地図上での絶対位置座標(例えば、緯度・経度である。)、各方面標識の地上からの高さ情報(進行方向情報)、各方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称(進行方向情報)、各方面標識に表示されている交差点から進行する各進行方向を表す矢印マーク(進行方向情報)等に関する各方面標識に対応する標識情報から構成されている。
例えば、標識情報DB36には、各方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称(進行方向情報)として、「左折は渋谷」、「直進は新宿」、「右折は上野」等が格納されると共に、各方面名称「渋谷」、「新宿」、「上野」の表示されている方面標識上の位置情報等(進行方向情報)も格納されている。また、標識情報DB36には、「左矢印」、「直進矢印」、「右矢印」(進行方向情報)等が格納されると共に、各矢印マークの方面標識上の位置情報(進行方向情報)等も格納されている。
【0023】
ここで、特に地図表示データとしては、10km×10kmで区画された2次メッシュをベースに4分割(長さ1/2)、16分割(1/4)、64分割(1/8)されたユニットで構成されており、各ユニットのデータ量が略同レベルになるように、各地のユニットが設定されている。最も小さい64分割サイズのユニットは、約1.25km四方の大きさである。
【0024】
また、ノードデータとしては、実際の道路の分岐点(交差点、T字路等も含む)、各道路に曲率半径等に応じて所定の距離ごとに設定されたノード点の座標(位置)、ノードが交差点に対応するノードであるか等を表すノード属性、ノードに接続するリンクの識別番号であるリンクIDのリストである接続リンク番号リスト、ノードにリンクを介して隣接するノードのノード番号のリストである隣接ノード番号リスト、各ノード点の高さ(高度)等に関するデータ等が記録される。
【0025】
また、リンクデータとしては、道路を構成する各リンクに関してリンクの属する道路の幅員、勾(こう)配、カント、バンク、路面の状態、道路の車線数、車線数の減少する箇所、幅員の狭くなる箇所、踏切り等を表すデータが、コーナに関して、曲率半径、交差点、T字路、コーナの入口及び出口等を表すデータが、道路属性に関して、降坂路、登坂路等を表すデータが、道路種別に関して、国道、県道、細街路等の一般道のほか、高速自動車国道、都市高速道路、一般有料道路、有料橋等の有料道路を表すデータがそれぞれ記録される。更に、有料道路に関して、有料道路の入口及び出口の取付道(ランプウェイ)、料金所(インターチェンジ)等に関するデータが記録される。
【0026】
また、探索データとしては、設定された目的地までの経路を探索及び表示する際に使用されるデータについて記録されており、ノードを通過する際のコスト(以下、ノードコストという)や道路を構成するリンクのコスト(以下、リンクコストという)からなる探索コストを算出する為に使用するコストデータ、経路探索により選択された誘導経路を液晶ディスプレイ17の地図上に表示するための経路表示データ等から構成されている。
【0027】
また、店舗データとしては、各地域のホテル、病院、ガソリンの給油所、駐車場、観光施設等のPOIに関するデータがPOIを特定するIDとともに記録される。なお、前記地図情報DB33には、所定の情報をナビゲーション装置2のスピーカ18によって出力するための音声出力データも記録される。
【0028】
また、液晶ディスプレイ17には、操作案内、操作メニュー、キーの案内、現在地から目的地までの誘導経路、誘導経路に沿った案内情報、交通情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。尚、液晶ディスプレイ17の代わりに、CRTディスプレイ、プラズマディスプレイ等を使用したり、車両のフロントガラスにホログラムを投影するホログラム装置等を使用することも可能である。
【0029】
また、スピーカ18は、ナビゲーションECU3からの指示に基づいて、誘導経路に沿った走行を案内する音声ガイダンスを出力する。ここで、案内される音声ガイダンスとしては、例えば、「300m先に方面標識があります。」、「200m先、○○交差点を左方向です。」等がある。なお、スピーカ18より出力される音声としては、合成された音声のほかに、各種効果音、予めテープやメモリ等に録音された各種の案内情報を出力することもできる。
【0030】
そして、通信装置19は、地図情報配信センタと通信を行う通信手段であり、地図情報配信センタとの間で最もバージョンの新しい更新地図情報等の送受信を行う。また、地図情報配信センタに加えて、例えば、道路交通情報センタ(VICS)等から送信された渋滞情報、交通規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況等の各情報から成る道路交通情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信する。また、通信装置17はLAN、WAN、イントラネット、携帯電話回線網、電話回線網、公衆通信回線網、専用通信回線網、インターネット等の通信回線網等の通信系において通信を可能とするネットワーク機器である。更に、通信装置19は道路交通情報センタ(VICS)からの情報の他に、ニュース、天気予報等の情報から成るFM多重情報を、FM放送局を介してFM多重放送として受信するFM受信機を備える。尚、前記ビーコンレシーバ及びFM受信機は、ユニット化されてVICSレシーバとして配設されるようになっているが、別々に配設することもできる。
【0031】
また、レーザー描画装置4には、ナビゲーションECU3から送信されるレーザ照射角度情報に基づいて所定照射形状を描画するためにレーザー光の照射角度を制御するレーザー照射角度制御部41と、ナビゲーションECU3から送信される方面標識上に描画するマークの色彩データ等に基づいてレーザー光の出力を制御するレーザー出力制御部42が設けられている。
【0032】
次に、上記のように構成されたレーザー描画システム1のナビゲーションECU3が実行する進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを視認可能なレーザー光で描画するレーザー描画処理について図2乃至図6に基づき説明する。
図2はナビゲーションECU3が実行する進行方向前方の道路上に設けられた方面標識の各進行方向を示す矢印マークや各進行方向の方面名称のうちの自車両の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを視認可能なレーザー光で描画するレーザー描画処理を示すフローチャートである。図3は自車両が道路上に設けられる方面標識の手前に来た状態を説明するための図である。図4は自車両が接近する方面標識において、交差点での進行方向に合致する方面名称を指し示す所定照射形状のマークを描画した一例を説明するための図である。図5は図4の方面標識の方面名称に所定照射形状のマークを描画した一例を示す拡大図である。図6は自車両が方面標識を通過した状態を説明するための図である。尚、図2にフローチャートで示されるプログラムは、ナビゲーションECU3が備えているRAMやROMに記憶されており、CPUにより実行される。
【0033】
図2に示すように、先ず、ステップ(以下、Sと略記する)1において、ナビゲーションECU3は、自車位置判定部32及び自車両姿勢判定部35により自車位置及び自車の向きを表す自車方位を検出して、自車位置を表す座標データ(例えば、緯度と経度のデータである。)と自車方位をRAM42に記憶する。そして、ナビゲーションECU3は、地図情報DB33から案内経路上における、自車両の進行方向前方にある交差点に関する交差点データを読み出し、RAMに記憶する。
続いて、S2において、ナビゲーションECU3は、自車位置を表す座標データと交差点データとをRAMから再度読み出し、自車両が交差点から所定距離以内(例えば、約200m〜500m以内である。)に接近したか否かを判定する判定処理を実行する。そして、自車両が交差点から所定距離以内に接近していない場合には(S2:NO)、ナビゲーションECU3は、再度、S1以降の処理を実行する。
【0034】
一方、自車両が交差点から所定距離以内(例えば、約200m〜500m以内である。)に接近した場合には(S2:YES)、ナビゲーションECU3は、S3の処理に移行する。S3において、ナビゲーションECU3は、地図情報DB33から自車両が接近する交差点の手前の道路上に設けられる方面標識の位置座標や方面標識の識別コード等に関する方面標識データを読み出す。そして、ナビゲーションECU3は、標識情報DB36からこの方面標識の識別コードに対応する方面標識の地図上での絶対位置座標(例えば、緯度・経度である。)、該方面標識の地上からの高さ情報、該方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称、該方面標識に表示されている交差点から進行する各進行方向を表す矢印マーク等に関する標識情報を読み出して、RAMに記憶する。また、ナビゲーションECU3は、標識情報DB36からこの方面標識の識別コードに対応する方面標識に関する標識情報を読み出してRAMに記憶した場合には、RAMから「方面標識フラグ」を読み出してONに設定する、即ち方面標識フラグに「1」を代入してRAMに再度、記憶する。
【0035】
尚、ナビゲーションECU3は、標識情報DB36からこの方面標識の識別コードに対応する方面標識に関する各種情報を読み出してRAMに記憶しなかった場合には、RAMから「方面標識フラグ」を読み出してOFFに設定する、即ち方面標識フラグに「0」を代入してRAMに再度、記憶する。ここで、エンジン始動時には、方面標識フラグはOFFに設定されている、即ち、方面標識フラグには「0」が代入されて、RAMに記憶されている。
【0036】
続いて、S4において、ナビゲーションECU3は、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報を読み出してRAMに記憶したか否か、即ち、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報が標識情報DB36に格納されていたか否かを判定する判定処理を実行する。具体的には、ナビゲーションECU3は、RAMから方面標識フラグを読み出し、この方面標識フラグがONか否か、即ち「1」か否かを判定する判定処理を実行する。そして、RAMから読み出した方面標識フラグがOFF、即ち「0」の場合には、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報が標識情報DB36に格納されていなかったと判定して(S4:NO)、ナビゲーションECU3は、再度、S1以降の処理を実行する。
【0037】
一方、RAMから読み出した方面標識フラグがON、即ち「1」の場合には、自車両が接近する交差点の手前の道路上に設けられた方面標識に関する標識情報が標識情報DB36に格納されていたと判定して(S4:YES)、ナビゲーションECU3は、S5の処理に移行する。S5において、ナビゲーションECU3は、自車位置判定部32及び自車両姿勢判定部35により自車位置及び自車の向きを表す自車方位を検出して、自車位置を表す座標データ(例えば、緯度と経度のデータである。)と自車方位をRAMに記憶する。そして、ナビゲーションECU3は、この自車位置を表す座標データと上記S3の処理においてRAMに記憶した方面標識の地図上での絶対位置座標(例えば、緯度・経度である。)とを読み出し、自車両がこの方面標識を通過したか否かを判定する判定処理を実行する。
そして、自車両がこの方面標識を通過したと判定した場合には(S5:YES)、ナビゲーションECU3は、レーザー描画装置4に対してレーザー出力を停止させる制御信号を出力して、方面標識上に描画している所定照射形状のマークの描画を終了した後、再度、S1以降の処理を実行する。
【0038】
また一方、自車両がこの方面標識を通過していないと判定した場合には(S5:NO)、ナビゲーションECU3は、S6の処理に移行する。S6において、ナビゲーションECU3は、ルームミラー付近に固定されたCCD(ステレオ)カメラ等により構成される前方撮像用カメラ14による自車両前方の撮像画像から、この撮像画像内の自車両が接近する交差点の手前の道路上に設けられる方面標識を画像処理により認識する。また、この際に、ナビゲーションECU3は、自車位置を表す座標データと上記S3の処理においてRAMに記憶した方面標識の地図上での絶対位置座標、方面標識の地上からの高さ情報等の標識情報を再度RAMから読み出して、前方撮像用カメラ14の撮像画像内の方面標識を認識する範囲を決定して、方面標識を画像処理により認識する。また、ナビゲーションECU3は、上記S3の処理においてRAMに記憶した該方面標識に表示されている交差点から進行する各進行方向と該各進行方向に対応する各方面名称、該方面標識に表示されている交差点から進行する各進行方向を表す矢印マーク等に関する標識情報に基づいて、経路案内処理プログラムによって決定される案内経路上における各交差点の進行方向から自車両が接近する交差点の進行方向に合致する方面名称や矢印マークを選択する。そして、この選択した方面名称や矢印マークを前方撮像用カメラ14の撮像画像内の方面標識からパターンマッチング等により抽出して認識する。
【0039】
続いて、S7において、ナビゲーションECU3は、照射位置決定部31を介して前方撮像用カメラ14の撮像画像内の画像処理によって認識した該撮像画像内の方面標識上における自車両の進行方向に合致する方面名称や矢印マークの撮像位置と、自車両のルームミラー付近に固定された前方撮像用カメラ14の設置高さ等のカメラ設置パラメータとから、この方面標識上における自車両が接近する交差点の進行方向に合致する方面名称や矢印マークと自車両との正確な相対位置関係(例えば、相対距離、相対角度等である。)を算出して、この方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して、RAMに記憶する。
【0040】
例えば、図3に示すように、上記S6の処理で、ナビゲーションECU3は、上記S3の処理においてRAMに記憶した方面標識53の地図上での絶対位置座標、方面標識53の地上からの高さ情報等の標識情報を再度RAMから読み出して、自車両51のルームミラー52付近に固定された前方撮像用カメラ14の撮像画像内の方面標識53を認識する範囲を決定し、この前方撮像用カメラ14の撮像画像から自車両51が接近する方面標識53を画像処理により認識する。また、ナビゲーションECU3は、上記S3の処理においてRAMに記憶した方面標識53に関する標識情報から「左折は渋谷」、「直進は新宿」、「右折は上野」を読み出し、経路案内処理プログラムによって決定される案内経路上における交差点58(図6参照)での進行方向が「左折」であることから、標識情報「左折は渋谷」に対応する該撮像画像内の方面標識53上の「渋谷」の方面名称54Aをパターンマッチング等により抽出して認識する。そして、上記S7の処理で、ナビゲーションECU3は、方面名称54Aの撮像位置と、自車両51のルームミラー52付近に固定された前方撮像用カメラ14の設置高さ等のカメラ設置パラメータとから、この方面名称54Aと自車両51との正確な相対位置関係(例えば、相対距離、相対角度等である。)を算出して、この方面名称54Aを指し示す横長楕円形のマーク61(図5参照)を描画する描画目標位置の座標データを算出して、RAMに記憶する。
尚、図5に示すように、方面標識53上には、左折を示す矢印マーク54Bの上側に「渋谷」の方面名称54Aが表示されている。また、方面標識53上には、直進を示す矢印マーク55Bの上側に「新宿」の方面名称55Aが表示されている。また、方面標識53上には、右折を示す矢印マーク56Bの上側に「上野」の方面名称56Aが表示されている。また、直進を示す矢印マーク55Bの下側に交差点58(図6参照)までの距離を示す「300m」の距離情報57が表示されている。
【0041】
そして、S8において、ナビゲーションECU3は、方面標識上の自車両が接近する交差点での進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データと、自車位置判定部32により判定された自車両の座標位置データと、自車両姿勢判定部35により判定された自車両の向きを表す方位情報とをRAMから再度読み出して、レーザー照射角決定部34によりレーザー光を照射して方面標識上の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークを描画するレーザ照射角度を算出して、レーザー照射角度情報としてRAMに記憶する。
続いて、S9において、ナビゲーションECU3は、RAMから再度、レーザー照射角度情報を読み出すと共に、方面標識上に描画する所定照射形状のマークの色彩データ(例えば、緑色である。)等をROMから読み出し、レーザー描画装置4に対して送信後、再度、S5以降の処理を実行する。これにより、レーザー描画装置4は、レーザー照射角度情報に基づいてレーザー照射角度制御部41によりレーザー光の照射角度を制御すると共に、方面標識上に描画する所定照射形状のマークの色彩データ等に基づいてレーザー出力制御部42により視認可能な所定の色のレーザー光を方面標識上の進行方向に合致する方面名称や矢印マークに照射して、所定照射形状のマークを描画する。
【0042】
例えば、図4及び図5に示すように、上記S8の処理において、ナビゲーションECU3は、方面標識53上の自車両51が接近する交差点58(図6参照)での進行方向に合致する「渋谷」の方面名称54Aを指し示す横長楕円形のマーク61を描画する描画目標位置の座標データと、自車位置と自車方位とから、レーザー照射角決定部34によりレーザー光を照射して「渋谷」の方面名称54Aの周囲に横長楕円形のマーク61を描画するためのレーザ照射角度を算出して、レーザー照射角度情報としてRAMに記憶する。そして、上記S9の処理において、ナビゲーションECU3は、RAMから再度、レーザー照射角度情報を読み出すと共に、横長楕円形のマーク61の色彩データ(例えば、緑色である。)等をROMから読み出し、レーザー描画装置4に対して送信し、該方面標識53上の「渋谷」の方面名称54Aの周囲に緑色等の視認可能なレーザー光で横長楕円形のマーク61を描画する。これにより、運転者は、方面標識53上の「渋谷」の方面名称54Aが緑色等の視認可能なレーザー光で描画された横長楕円形のマーク61で囲まれたのを見て、自車両51が「渋谷」方面に左折すべきことを一目瞭然に認識することができる。
その後、図6に示すように、ナビゲーションECU3は、自車両51がこの方面標識53を通過したと判定した場合には、レーザー描画装置4の出力を停止して、方面標識53上に描画している横長楕円形のマーク61の描画を自動的に終了する。また、自車両51の運転者は、交差点58の手前で、前方から目を逸らすことなく左側に車線変更して、この交差点58に進入し、「渋谷」方面に安全に左折することができる。
【0043】
ここで、自車位置判定部32、自車両姿勢判定部35は、自車位置検出手段を構成する。また、地図情報DB33は、地図情報記憶手段として機能する。また、標識情報DB36は、標識情報記憶手段として機能する。また、ナビゲーションECU3、地図情報DB33は、経路探索手段を構成する。また、ナビゲーションECU3、自車位置判定部32、地図情報DB33、自車両姿勢判定部35は、交差点接近検出手段を構成する。また、ナビゲーションECU3、標識情報DB36は、標識情報取得手段、進行方向情報選択手段を構成する。また、ナビゲーションECU3、前方用撮像カメラ14は、認識手段を構成する。また、ナビゲーションECU3、照射位置決定部31は、相対位置算出手段を構成する。また、ナビゲーションECU3、照射位置決定部31、レーザー照射角決定部34、レーザー描画装置4は、描画手段を構成する。
【0044】
以上詳細に説明した通り、本実施例に係るレーザー描画システム1では、自車両が探索された経路上の交差点に関する方面標識に接近した場合には、自車両の前方を撮像する前方撮像用カメラ14により撮像画像内の方面標識が認識されて、この方面標識上の自車両の進行方向に合致する方面名称や矢印マークを指し示す所定照射形状のマークが視認可能なレーザー光で描画されるため、運転者は、前方の方面標識上に描画された所定照射形状のマークに基づいて、進路変更をすることが可能となり、前方から目を逸らす必要がなく、また、スピーカ18を介した方面標識の案内の案内内容を理解するまでもなく、一目瞭然でこの方面標識に関する交差点での進行方向を知ることが可能となる。
また、ナビゲーションECU3は、撮像情報DB36に格納される方面標識の地上からの高さ情報等に基づいて、前方撮像用カメラ14による撮像画像内の方面標識を認識する範囲を決定するため、方面標識の認識処理の高速化を図ることができ、自車両と方面標識との相対位置をより正確に算出することが可能となる。
【0045】
尚、本発明は前記実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、前記実施例では、方面標識上の方面名称や矢印マークに所定照射形状のマークを視認可能なレーザー光で描画したが、方面名称の文字や矢印マークの形に合わせた照射形状で、この方面名称の文字や矢印マークに重なるように視認可能なレーザー光を照射するようにしてもよい。これにより、進行方向に合致する方面名称の文字や矢印マークがレーザー光により光るため、運転者は進行方向前方の方面標識上で光っている方面名称の文字や矢印マークから接近する交差点での進行方向を容易に認識することができる。また、レーザー光を間欠照射することにより、方面標識上で光っている方面名称の文字が点滅するため、運転者は接近する交差点での進行方向を更に容易に認識することが可能となる。
また、所定照射形状のマークとしては、上記のように方面名称や矢印マークを囲むように描画される横長楕円形等のマークだけでなく、レーザー光を一点に対して照射した際に描画される描画点を用いても良く、このような描画点も本願発明に係る所定形状のマークに含まれる。
【図面の簡単な説明】
【0046】
【図1】本実施例に係るレーザー描画システムを示すブロック図である。
【図2】ナビゲーションECUが実行するレーザー描画処理を示すフローチャートである。
【図3】自車両が道路上に設けられる方面標識の手前に来た状態を説明するための図である。
【図4】自車両が接近する方面標識において、交差点での進行方向に合致する方面名称を指し示す所定照射形状のマークを描画した一例を説明するための図である。
【図5】図4の方面標識の方面名称に所定照射形状のマークを描画した一例を示す拡大図である。
【図6】自車両が方面標識を通過した状態を説明するための図である。
【符号の説明】
【0047】
1 レーザー描画システム
2 ナビゲーション装置
3 ナビゲーションECU
4 レーザー描画装置
11 ステアリングセンサ
12 車速センサ
13 GPS
14 前方撮像用カメラ
15 3D加速度センサ
31 照射位置決定部
32 自車位置判定部
33 地図情報DB
34 レーザー照射角決定部
35 自車両姿勢判定部
48 標識情報DB
【特許請求の範囲】
【請求項1】
自車位置を検出する自車位置検出手段と、
交差点の位置情報を含む地図情報を記憶する地図情報記憶手段と、
道路上に設けられる方面標識の位置情報と進行方向に関する進行方向情報とを含む標識情報を記憶する標識情報記憶手段と、
目的地までの経路を探索する経路探索手段と、
前記自車位置と前記地図情報とに基づいて前記経路上の交差点への接近を検出する交差点接近検出手段と、
前記交差点接近検出手段の検出結果に基づいて自車両が接近する交差点に関する前記標識情報を取得する標識情報取得手段と、
自車両の前方を撮像する撮像手段と、
前記交差点接近検出手段の検出結果に基づいて前記撮像手段による撮像画像内の方面標識を認識する認識手段と、
前記認識手段による認識結果に基づいて自車両と前記方面標識との相対位置を算出する相対位置算出手段と、
前記経路に基づいて前記標識情報取得手段によって取得された標識情報から自車両が接近する交差点での進行方向に合致する進行方向情報を選択する進行方向情報選択手段と、
前記相対位置算出手段によって算出した自車両と前記方面標識との相対位置に基づいて前記進行方向情報選択手段によって選択された進行方向情報を指し示す所定形状のマークを道路上に設けられる方面標識上に描画する描画手段と、
を備えたことを特徴とする描画システム。
【請求項2】
前記標識情報は、前記方面標識の高さ情報を含み、
前記認識手段は、前記高さ情報に基づいて前記撮像画像内の方面標識を認識する範囲を決定することを特徴とする請求項1に記載の描画システム。
【請求項3】
前記進行方向情報は、前記交差点から進行する各進行方向と該各進行方向に対応する各方面名称とを含むことを特徴とする請求項1又は請求項2に記載の描画システム。
【請求項1】
自車位置を検出する自車位置検出手段と、
交差点の位置情報を含む地図情報を記憶する地図情報記憶手段と、
道路上に設けられる方面標識の位置情報と進行方向に関する進行方向情報とを含む標識情報を記憶する標識情報記憶手段と、
目的地までの経路を探索する経路探索手段と、
前記自車位置と前記地図情報とに基づいて前記経路上の交差点への接近を検出する交差点接近検出手段と、
前記交差点接近検出手段の検出結果に基づいて自車両が接近する交差点に関する前記標識情報を取得する標識情報取得手段と、
自車両の前方を撮像する撮像手段と、
前記交差点接近検出手段の検出結果に基づいて前記撮像手段による撮像画像内の方面標識を認識する認識手段と、
前記認識手段による認識結果に基づいて自車両と前記方面標識との相対位置を算出する相対位置算出手段と、
前記経路に基づいて前記標識情報取得手段によって取得された標識情報から自車両が接近する交差点での進行方向に合致する進行方向情報を選択する進行方向情報選択手段と、
前記相対位置算出手段によって算出した自車両と前記方面標識との相対位置に基づいて前記進行方向情報選択手段によって選択された進行方向情報を指し示す所定形状のマークを道路上に設けられる方面標識上に描画する描画手段と、
を備えたことを特徴とする描画システム。
【請求項2】
前記標識情報は、前記方面標識の高さ情報を含み、
前記認識手段は、前記高さ情報に基づいて前記撮像画像内の方面標識を認識する範囲を決定することを特徴とする請求項1に記載の描画システム。
【請求項3】
前記進行方向情報は、前記交差点から進行する各進行方向と該各進行方向に対応する各方面名称とを含むことを特徴とする請求項1又は請求項2に記載の描画システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−322283(P2007−322283A)
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願番号】特願2006−153884(P2006−153884)
【出願日】平成18年6月1日(2006.6.1)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願日】平成18年6月1日(2006.6.1)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]