
描画方法、描画装置
【課題】従来の描画装置では、コストを低減することが困難であるという課題がある。
【解決手段】紫外光41の照射を受けることによって硬化する機能液53を吐出する吐出ヘッド33からワークWに向けて機能液53を吐出することによって、ワークWに機能液53を塗布する塗布工程と、ワークWに塗布された機能液53に対して、紫外光41を含む光を発する光源43により紫外光41を照射する照射工程と、前記照射工程の前に、ワークWの熱特性に応じて光源43とワークWとの間の距離を制御する距離制御工程と、を有する、ことを特徴とする描画方法。
【解決手段】紫外光41の照射を受けることによって硬化する機能液53を吐出する吐出ヘッド33からワークWに向けて機能液53を吐出することによって、ワークWに機能液53を塗布する塗布工程と、ワークWに塗布された機能液53に対して、紫外光41を含む光を発する光源43により紫外光41を照射する照射工程と、前記照射工程の前に、ワークWの熱特性に応じて光源43とワークWとの間の距離を制御する距離制御工程と、を有する、ことを特徴とする描画方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、描画方法、描画装置等に関する。
【背景技術】
【0002】
従来から、紫外光の照射を受けて硬化する液状体をワークに塗布することによって、液状体でワークに描画を行う描画装置が知られている。このような描画装置には、ワークに塗布された液状体に照射する紫外光を発する光源を有するものがある。
ところで、上記のような光源は、一般的に、熱も発する。液状体が塗布されたワークに向けて紫外光を発する光源が発熱すると、光源からの熱でワークが加熱されやすい。このため、例えば、熱によって伸びたり縮んだりしやすいワークである場合、熱によるワークの伸縮によって描画品位が損なわれることがある。
そこで、ワークの温度上昇を軽減するために、ワークを冷却することが考えられる。そして、従来、描画装置の1つであるインクジェットプリンターにおいて、ペルチェ素子で記録媒体(ワーク)を冷却することができるものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−130705号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載された構成によれば、ペルチェ素子でワークを冷却することができるので、描画品位を保ちやすくすることができる。
しかしながら、ペルチェ素子は、一般的に高価である。このため、従来の描画装置では、コストを低減することが困難であるという課題がある。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現され得る。
【0006】
[適用例1]紫外光の照射を受けることによって硬化する液状体を吐出する吐出ヘッドからワークに向けて前記液状体を吐出することによって、前記ワークに前記液状体を塗布する塗布工程と、前記ワークに塗布された前記液状体に対して、前記紫外光を含む光を発する光源により前記光を照射する照射工程と、前記照射工程の前に、前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する距離制御工程と、を有する、ことを特徴とする描画方法。
【0007】
この適用例の描画方法は、塗布工程と、照射工程と、距離制御工程と、を有する。
塗布工程では、液状体を吐出する吐出ヘッドからワークに向けて液状体を吐出することによって、ワークに液状体を塗布する。液状体は、紫外光の照射を受けることによって硬化する性質を有する。
照射工程では、ワークに塗布された液状体に対して、紫外光を含む光を発する光源により光を照射する。これにより、ワークに塗布された液状体を硬化させることができる。
距離制御工程では、ワークの熱特性に応じて光源とワークとの間の距離を制御する。ワークの熱特性とは、熱によるワークの種々の状態や性質の変化を指す。例えば、熱によるワークの伸縮が熱特性の1つである。
この描画方法では、照射工程の前に距離制御工程が行われる。この距離制御工程により、光源からの熱をワークに伝えにくくすることができる。このため、光源からの熱によるワークの特性変化を避けやすくすることができる。この結果、描画品位が損なわれることを抑えやすくすることができる。また、この描画方法によれば、ワークを冷却するためのペルチェ素子などを用いる方法に比較して、描画や装置にかかるコストを低減することができる。
【0008】
[適用例2]上記の描画方法であって、前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に前記光を照射する時間を、前記距離を広げる前よりも長くする、ことを特徴とする描画方法。
【0009】
光源とワークとの間の距離を広げると、液状体が受ける紫外光の照射量が減少する。この適用例では、距離制御工程で距離を広げたときに、照射工程において、液状体に光を照射する時間を、距離を広げる前よりも長くするので、距離を広げたことに起因する紫外光の照射量の減少を補うことができる。この結果、液状体の硬化不足を避けやすくすることができるので、描画品位が損なわれることを一層抑えやすくすることができる。
【0010】
[適用例3]上記の描画方法であって、前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に照射する前記光の強度を、前記距離を広げる前よりも強くする、ことを特徴とする描画方法。
【0011】
光源とワークとの間の距離を広げると、液状体が受ける紫外光の照射量が減少する。この適用例では、距離制御工程で距離を広げたときに、照射工程において、液状体に照射する光の強度を、距離を広げる前よりも強くするので、距離を広げたことに起因する紫外光の照射量の減少を補うことができる。この結果、液状体の硬化不足を避けやすくすることができるので、描画品位が損なわれることを一層抑えやすくすることができる。
【0012】
[適用例4]上記の描画方法であって、前記塗布工程では、前記吐出ヘッドを支持するキャリッジに対する前記ワークの相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、前記照射工程では、前記キャリッジに設けられた前記光源で前記液状体に前記光を照射する、ことを特徴とする描画方法。
【0013】
この適用例では、塗布工程において、吐出ヘッドを支持するキャリッジに対するワークの相対位置を変化させながら、吐出ヘッドから液状体を吐出する。また、照射工程では、キャリッジに設けられた光源で液状体に光を照射する。
この描画方法によれば、キャリッジに対するワークの相対位置を変化させながら、吐出ヘッドから液状体を吐出するときに、光源を吐出ヘッドに追従させることができる。このため、吐出ヘッドから液状体を吐出させながら、ワークに塗布された液状体に光を照射することができる。
【0014】
[適用例5]上記の描画方法であって、前記塗布工程では、少なくとも前記キャリッジを移動させることによって前記相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、前記照射工程では、前記キャリッジの移動方向に前記吐出ヘッドを挟んだそれぞれの箇所に設けられた前記光源で前記液状体に前記光を照射する、ことを特徴とする描画方法。
【0015】
この適用例では、塗布工程では、少なくともキャリッジを移動させることによって相対位置を変化させながら、吐出ヘッドから液状体を吐出する。また、照射工程では、キャリッジの移動方向に吐出ヘッドを挟んだそれぞれの箇所に設けられた光源で液状体に光を照射する。
この描画方法によれば、キャリッジを移動させながら、吐出ヘッドから液状体を吐出するときに、それぞれの光源を吐出ヘッドに追従させることができる。このため、例えばキャリッジを往復移動させるときに往動及び復動のそれぞれにおいて、吐出ヘッドから液状体を吐出させながら、ワークに塗布された順に液状体に光を照射することができる。
【0016】
[適用例6]紫外光の照射を受けることによって硬化する液状体をワークに向けて吐出する吐出ヘッドと、前記ワークに塗布された前記液状体に照射する前記紫外光を含む光を発する光源と、前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する制御部と、を有する、ことを特徴とする描画装置。
【0017】
この適用例の描画装置は、吐出ヘッドと、光源と、制御部と、を有する。
吐出ヘッドは、紫外光の照射を受けることによって硬化する液状体をワークに向けて吐出する。
光源は、ワークに塗布された液状体に照射する紫外光を含む光を発する。
制御部は、ワークの熱特性に応じて光源とワークとの間の距離を制御する。ワークの熱特性とは、熱によるワークの種々の状態や性質の変化を指す。例えば、熱によるワークの伸縮が熱特性の1つである。
上記の構成により、吐出ヘッドでワークに塗布した液状体を、光源からの光を照射することによって硬化させることができる。
また、この描画装置では、制御部によって、ワークの熱特性に応じて光源とワークとの間の距離が制御されるので、光源からの熱をワークに伝えにくくすることができる。このため、光源からの熱によるワークの特性変化を避けやすくすることができる。この結果、描画品位が損なわれることを抑えやすくすることができる。また、この描画装置によれば、ワークを冷却するためのペルチェ素子などに比較して、描画や装置にかかるコストを低減することができる。
【0018】
[適用例7]上記の描画装置であって、前記吐出ヘッドを支持するキャリッジと、前記吐出ヘッドと前記ワークとを互いに対面させた状態で前記キャリッジに対する前記ワークの相対位置を変位させる変位装置と、を有し、前記光源は、前記キャリッジに設けられており、且つ、前記相対位置の変位方向において、前記吐出ヘッドに並んでいる、ことを特徴とする描画装置。
【0019】
この適用例の描画装置は、キャリッジと、変位装置と、を有する。
キャリッジは、吐出ヘッドを支持する。
変位装置は、吐出ヘッドとワークとを互いに対面させた状態でキャリッジに対するワークの相対位置を変位させる。
この描画装置では、光源は、キャリッジに設けられている。また、光源は、相対位置の変位方向において、吐出ヘッドに並んでいる。
上記の構成により、キャリッジに対するワークの相対位置を変位させるときに、光源を吐出ヘッドに追従させることができる。このため、吐出ヘッドから液状体を吐出させながら、ワークに塗布された液状体に光を照射することができる。
【図面の簡単な説明】
【0020】
【図1】本実施形態における液滴吐出装置の概略の構成を示す斜視図。
【図2】本実施形態におけるキャリッジを図1中のA視方向に見たときの正面図。
【図3】本実施形態における吐出ヘッドの底面図。
【図4】図2中のB−B線における断面図。
【図5】本実施形態における液滴吐出装置の概略の構成を示すブロック図。
【図6】本実施形態における描画処理の流れを示す図。
【図7】本実施形態における第1反復照射処理の流れを示す図。
【図8】本実施形態における第2反復照射処理の流れを示す図。
【図9】本実施形態における第3反復照射処理の流れを示す図。
【発明を実施するための形態】
【0021】
図面を参照しながら、描画装置の1つである液滴吐出装置を例に、実施形態について説明する。なお、各図面において、それぞれの構成を認識可能な程度の大きさにするために、構成や部材の縮尺が異なっていることがある。
【0022】
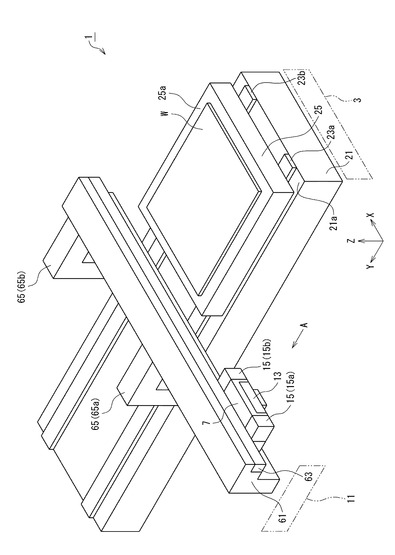
本実施形態における液滴吐出装置1は、概略の構成を示す斜視図である図1に示すように、ワーク搬送装置3と、キャリッジ7と、キャリッジ搬送装置11と、を有している。
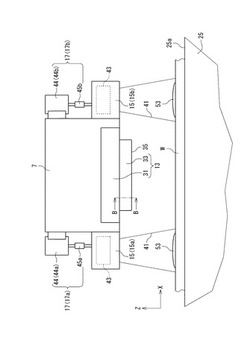
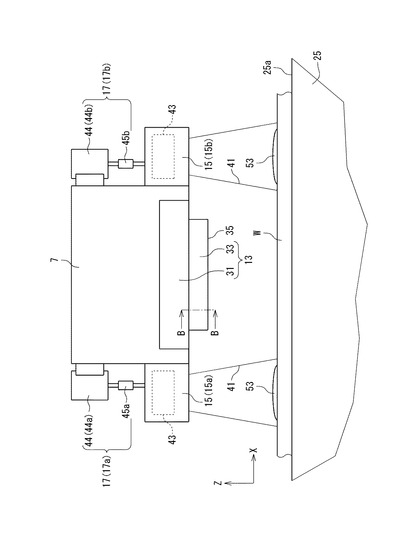
また、液滴吐出装置1は、キャリッジ7を図1中のA視方向に見たときの正面図である図2に示すように、ヘッドユニット13と、2個の照射装置15と、2個の昇降装置17と、を有している。
ヘッドユニット13と、2個の照射装置15と、2個の昇降装置17とは、それぞれ、キャリッジ7に設けられている。
図1に示す液滴吐出装置1では、ヘッドユニット13と基板などのワークWとの平面視での相対位置を変化させつつ、ヘッドユニット13から液状体を液滴として吐出させることによって、ワークWに液状体で所望のパターンを描画(記録)することができる。なお、図中のY方向はワークWの移動方向を示し、X方向は平面視でY方向とは直交する方向を示している。また、X方向及びY方向によって規定されるXY平面と直交する方向は、Z方向として規定される。
【0023】
このような液滴吐出装置1は、例えば、樹脂フィルムなどのように、液状体が浸透しにくいワークWへの描画に適用され得る。
また、液滴吐出装置1は、例えば、液晶表示パネル等に用いられるカラーフィルターの製造や、有機EL装置の製造などにも適用され得る。
赤、緑及び青の3色のフィルターエレメントを有するカラーフィルターの場合、液滴吐出装置1は、例えば、基板に赤、緑及び青の各着色層を形成する工程で好適に使用され得る。この場合、ヘッドユニット13から各着色層に対応する各液状体を、ワークWに液滴として吐出させることによって、ワークWに赤、緑及び青のそれぞれのフィルターエレメントのパターンが描画される。
また、有機EL装置の製造では、例えば、赤、緑及び青の画素ごとに、各色に対応する機能層(有機層)を形成する工程で好適に使用され得る。この場合、ヘッドユニット13から各色の機能層に対応する各液状体を、ワークWに液滴として吐出されることによって、ワークWに赤、緑及び青のそれぞれの機能層のパターンが描画される。
記録媒体としてのワークWは、上述した基板や樹脂フィルムなどに限定されず、紙、布、金属箔など、種々の記録媒体が採用され得る。
【0024】
ここで、液滴吐出装置1の各構成について、詳細を説明する。
ワーク搬送装置3は、図1に示すように、定盤21と、ガイドレール23aと、ガイドレール23bと、ワークテーブル25と、を有している。
定盤21は、例えば石などの熱膨張係数が小さい材料で構成されており、Y方向に沿って延びるように据えられている。ガイドレール23a及びガイドレール23bは、定盤21の上面21a上に配設されている。ガイドレール23a及びガイドレール23bは、それぞれ、Y方向に沿って延在している。ガイドレール23aとガイドレール23bとは、互いにX方向に隙間をあけた状態で並んでいる。
【0025】
ワークテーブル25は、ガイドレール23a及びガイドレール23bを挟んで定盤21の上面21aに対向した状態で設けられている。ワークテーブル25は、定盤21から浮いた状態でガイドレール23a及びガイドレール23b上に載置されている。ワークテーブル25は、ワークWが載置される面である載置面25aを有している。載置面25aは、定盤21側とは反対側(上側)に向けられている。ワークテーブル25は、ガイドレール23a及びガイドレール23bによってY方向に沿って案内され、定盤21上をY方向に沿って往復移動可能に構成されている。
【0026】
ワークテーブル25は、図示しない移動機構及び動力源によって、Y方向に往復移動可能に構成されている。移動機構としては、例えば、ボールねじとボールナットとを組み合わせた機構や、リニアガイド機構などが採用され得る。また、本実施形態では、ワークテーブル25をY方向に沿って移動させるための動力源として、後述するワーク搬送モーターが採用されている。ワーク搬送モーターとしては、ステッピングモーター、サーボモーター、リニアモーターなどの種々のモーターが採用され得る。
ワーク搬送モーターからの動力は、移動機構を介してワークテーブル25に伝達される。これにより、ワークテーブル25は、ガイドレール23a及びガイドレール23bに沿って、すなわちY方向に沿って往復移動することができる。つまり、ワーク搬送装置3は、ワークテーブル25の載置面25aに載置されたワークWを、Y方向に沿って往復移動させることができる。
【0027】
ヘッドユニット13は、図2に示すように、ヘッドプレート31と、吐出ヘッド33と、を有している。
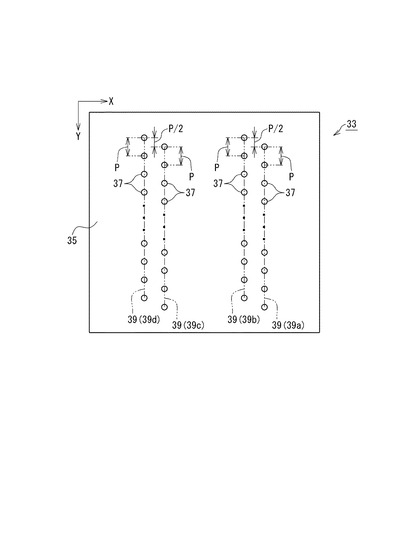
吐出ヘッド33は、底面図である図3に示すように、ノズル面35を有している。ノズル面35には、複数のノズル37が形成されている。なお、図3では、ノズル37をわかりやすく示すため、ノズル37が誇張され、且つノズル37の個数が減じられている。
吐出ヘッド33において、複数のノズル37は、Y方向に沿って配列する4本のノズル列39を構成している。4本のノズル列39は、X方向に互いに隙間をあけた状態で並んでいる。各ノズル列39において、複数のノズル37は、Y方向に沿って所定のノズル間隔Pで形成されている。
以下において、4本のノズル列39のそれぞれが識別される場合に、ノズル列39a、ノズル列39b、ノズル列39c及びノズル列39dという表記が用いられる。
吐出ヘッド33において、ノズル列39aとノズル列39bとは、互いにY方向にP/2の距離だけずれている。ノズル列39c及びノズル列39dも、互いにY方向にP/2の距離だけずれている。
【0028】
2個の照射装置15は、図2に示すように、それぞれ、X方向にヘッドユニット13を挟んで互いに対峙する位置に設けられている。以下において、2個の照射装置15のそれぞれを識別する場合に、照射装置15a及び照射装置15bという表記が用いられる。
照射装置15a及び照射装置15bは、それぞれ、紫外光41を発する光源43を有している。光源43からの紫外光41は、吐出ヘッド33から吐出された機能液53(液状体)の硬化を促進させる。機能液53は、紫外光41の照射を受けると、硬化が促進する。
光源43としては、例えば、LED、LD、水銀ランプ、メタルハライドランプ、キセノンランプ、エキシマランプ等の種々の光源43が採用され得る。
なお、本実施形態では、光源43のY方向における長さは、吐出ヘッド33のノズル列39を網羅する長さに設定されている。
なお、照射装置15aの光源43と、照射装置15bの光源43とは、それぞれ、吐出ヘッド33のノズル面35がX方向に沿って描く軌跡に、平面視で重なっている。
【0029】
2個の昇降装置17は、照射装置15a及び照射装置15bのそれぞれに対応して設けられている。以下において、2個の昇降装置17のそれぞれを識別する場合に、昇降装置17a及び昇降装置17bという表記が用いられる。このとき、昇降装置17aが照射装置15aに対応し、昇降装置17bが照射装置15bに対応する。
2個の昇降装置17は、それぞれ、対応する照射装置15を昇降させる。昇降装置17aが照射装置15aを昇降させ、昇降装置17bが照射装置15bを昇降させる。
昇降装置17aは、昇降モーター44aと、昇降機構45aと、を有している。同様に、昇降装置17bは、昇降モーター44bと、昇降機構45bと、を有している。昇降機構45a及び昇降機構45bとしては、それぞれ、例えば、ボールねじとボールナットとを組み合わせた機構や、リニアガイド機構などが採用され得る。
【0030】
昇降モーター44aは、照射装置15aを昇降させるための動力を発生する。昇降モーター44aからの動力は、昇降機構45aを介して照射装置15aに伝達される。これにより、照射装置15aは、Z方向に沿って昇降することができる。
同様に、昇降モーター44bは、照射装置15bを昇降させるための動力を発生する。昇降モーター44bからの動力は、昇降機構45bを介して照射装置15bに伝達される。これにより、照射装置15bは、Z方向に沿って昇降することができる。
なお、昇降モーター44a及び昇降モーター44bとしては、それぞれ、ステッピングモーター、サーボモーター、リニアモーターなどの種々のモーターが採用され得る。
【0031】
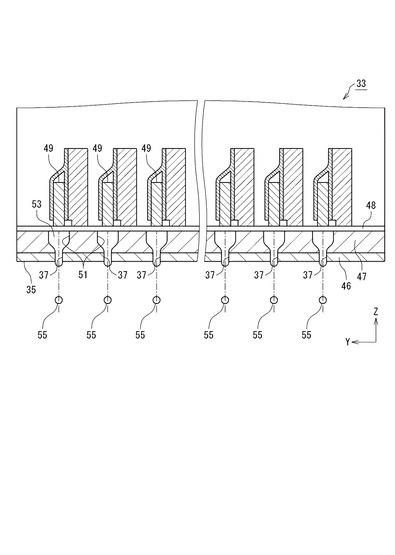
吐出ヘッド33は、図2中のB−B線における断面図である図4に示すように、ノズルプレート46と、キャビティープレート47と、振動板48と、複数の圧電素子49と、を有している。
ノズルプレート46は、ノズル面35を有している。複数のノズル37は、ノズルプレート46に設けられている。
キャビティープレート47は、ノズルプレート46のノズル面35とは反対側の面に設けられている。キャビティープレート47には、複数のキャビティー51が形成されている。各キャビティー51は、各ノズル37に対応して設けられており、対応する各ノズル37に連通している。各キャビティー51には、図示しないタンクから機能液53が供給される。
【0032】
振動板48は、キャビティープレート47のノズルプレート46側とは反対側の面に設けられている。振動板48は、Z方向に振動(縦振動)することによって、キャビティー51内の容積を拡大したり、縮小したりする。
複数の圧電素子49は、それぞれ、振動板48のキャビティープレート47側とは反対側の面に設けられている。各圧電素子49は、各キャビティー51に対応して設けられており、振動板48を挟んで各キャビティー51に対向している。各圧電素子49は、駆動信号に基づいて、伸長する。これにより、振動板48がキャビティー51内の容積を縮小させる。このとき、キャビティー51内の機能液53に圧力が付与される。その結果、ノズル37から、機能液53が液滴55として吐出される。吐出ヘッド33による液滴55の吐出法は、インクジェット法の1つである。インクジェット法は、塗布法の1つである。
【0033】
上記の構成を有する吐出ヘッド33は、図2に示すように、ノズル面35がヘッドプレート31から突出した状態で、ヘッドプレート31に支持されている。
キャリッジ7は、図2に示すように、ヘッドユニット13を支持している。ここで、ヘッドユニット13は、ノズル面35がZ方向の下方に向けられた状態でキャリッジ7に支持されている。
上記により、ワークWには、吐出ヘッド33から機能液53が塗布され得る。
なお、本実施形態では、縦振動型の圧電素子49が採用されているが、機能液53に圧力を付与するための加圧手段は、これに限定されず、例えば、下電極と圧電体層と上電極とを積層形成した撓み変形型の圧電素子も採用され得る。また、加圧手段としては、振動板と電極との間に静電気を発生させて、静電気力によって振動板を変形させてノズルから液滴55を吐出させるいわゆる静電式アクチュエーターなども採用され得る。さらに、発熱体を用いてノズル内に泡を発生させ、その泡によって機能液53に圧力を付与する構成も採用され得る。
【0034】
本実施形態では、機能液53として、光の照射を受けることによって硬化が促進する機能液53が採用されている。本実施形態では、機能液53の硬化を促進させる光として紫外光41が採用されている。
機能液53は、樹脂材料、光重合開始剤及び溶媒を、成分として含んでいる。これらの成分に、顔料や染料等の色素や、親液性や撥液性等の表面改質材料などの機能性材料を添加することによって固有の機能を有する機能液53を生成することができる。顔料や染料等の色素を含有する機能液53は、例えば、ワークWに描画する画像を形成するための機能液53として採用され得る。以下において、ワークWに描画する画像を形成するための機能液53は、画像塗料と呼ばれる。
【0035】
また、機能液53の成分としての樹脂材料に、例えば、アクリル系の樹脂材料などの光透過性を有する樹脂材料を採用することによって、光透過性を有する機能液53を構成することができる。このような光透過性を有する機能液53は、例えば、クリアインクとしての用途が考えられる。以下において、光透過性を有する機能液53は、透光塗料と呼ばれる。
クリアインクの用途としては、例えば、画像を被覆するオーバーコート層としての用途や、画像を形成する前の下地層としての用途などが考えられる。以下において、下地層として適用される機能液53は、下地塗料と呼ばれる。
下地塗料としては、透光塗料だけでなく、透光塗料に種々の顔料を添加した機能液53を採用することもできる。例えば、白色を呈する機能液53や、金属的な光沢(メタリック)を示す機能液53なども、下地塗料として採用され得る。
【0036】
機能液53における樹脂材料は、樹脂膜を形成する材料である。このような樹脂材料としては、常温で液状であり、重合させることによってポリマーとなる材料であれば特に限定されない。樹脂材料としては、粘性が小さいものが好ましく、オリゴマーの形態であるのが好ましい。さらに、樹脂材料としては、モノマーの形態であることが一層好ましい。
光重合開始剤は、ポリマーの架橋性基に作用して架橋反応を進行させる添加剤である。光重合開始剤としては、例えば、ベンジルジメチルケタールなどが採用され得る。本実施形態では、光重合開始剤として、ラジカル型の光重合開始剤が採用されている。ラジカル型の光重合開始剤としては、例えば、チバ・ジャパン(株)社製のイルガキュア819などが採用され得る。
溶媒は、樹脂材料の粘度を調整するためのものである。
【0037】
キャリッジ搬送装置11は、図1に示すように、架台61と、ガイドレール63と、を有している。
架台61は、X方向に延在しており、ワーク搬送装置3をX方向にまたいでいる。架台61は、ワークテーブル25の定盤21側とは反対側で、ワーク搬送装置3に対向している。架台61は、一対の支柱65によって支持されている。一対の支柱65は、定盤21を挟んでX方向に互いに対峙する位置に設けられている。
なお、以下においては、一対の支柱65のそれぞれを識別する場合に、支柱65a及び支柱65bという表記が用いられる。支柱65a及び支柱65bは、それぞれ、ワークテーブル25よりもZ方向の上方に突出している。これにより、架台61とワークテーブル25との間には、隙間が保たれている。
【0038】
ガイドレール63は、架台61の定盤21側に設けられている。ガイドレール63は、X方向に沿って延在しており、架台61のX方向における幅にわたって設けられている。
前述したキャリッジ7は、ガイドレール63に支持されている。キャリッジ7がガイドレール63に支持された状態において、吐出ヘッド33のノズル面35は、Z方向においてワークテーブル25側に向いている。キャリッジ7は、ガイドレール63によってX方向に沿って案内され、X方向に往復移動可能な状態でガイドレール63に支持されている。なお、平面視で、キャリッジ7がワークテーブル25に重なっている状態において、ノズル面35とワークテーブル25の載置面25aとは、互いに隙間を保った状態で対向する。
【0039】
キャリッジ7は、図示しない移動機構及び動力源によって、X方向に往復移動可能に構成されている。移動機構としては、例えば、ボールねじとボールナットとを組み合わせた機構や、リニアガイド機構などが採用され得る。また、キャリッジ搬送装置11は、キャリッジ7をX方向に沿って移動させるための動力源として、図示しないキャリッジ搬送モーターを有している。キャリッジ搬送モーターとしては、ステッピングモーター、サーボモーター、リニアモーターなどの種々のモーターが採用され得る。
キャリッジ搬送モーターからの動力は、移動機構を介してキャリッジ7に伝達される。これにより、キャリッジ7は、ガイドレール63に沿って、すなわちX方向に沿って往復移動することができる。つまり、キャリッジ搬送装置11は、キャリッジ7に支持されたヘッドユニット13を、X方向に沿って往復移動させることができる。
上記の構成を有する液滴吐出装置1では、吐出ヘッド33をワークWに対面させた状態で、吐出ヘッド33とワークWとを相対的に往復移動させながら、吐出ヘッド33から液滴55を吐出させることによって、ワークWへのパターンの描画が行われる。
【0040】
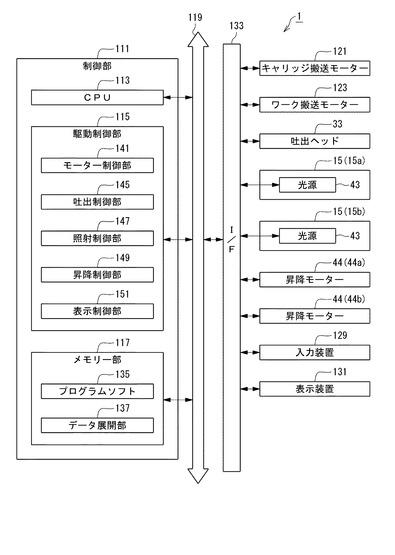
液滴吐出装置1は、図5に示すように、上記の各構成の動作を制御する制御部111を有している。制御部111は、CPU(Central Processing Unit)113と、駆動制御部115と、メモリー部117と、を有している。駆動制御部115及びメモリー部117は、バス119を介してCPU113に接続されている。
また、液滴吐出装置1は、キャリッジ搬送モーター121と、ワーク搬送モーター123と、入力装置129と、表示装置131と、を有している。
キャリッジ搬送モーター121及びワーク搬送モーター123は、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。また、入力装置129及び表示装置131も、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。
【0041】
キャリッジ搬送モーター121は、キャリッジ7を駆動するための動力を発生させる。ワーク搬送モーター123は、ワークテーブル25を駆動するための動力を発生させる。
入力装置129は、各種の加工条件を入力する装置である。表示装置131は、加工条件や、作業状況を表示する装置である。液滴吐出装置1を操作するオペレーターは、表示装置131に表示される情報を確認しながら、入力装置129を介して種々の情報を入力することができる。
なお、吐出ヘッド33、照射装置15a及び照射装置15bも、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。また、昇降モーター44a及び昇降モーター44bも、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。
【0042】
CPU113は、プロセッサーとして各種の演算処理を行う。駆動制御部115は、各構成の駆動を制御する。メモリー部117は、RAM(Random Access Memory)や、ROM(Read Only Memory)などを含んでいる。メモリー部117には、液滴吐出装置1における動作の制御手順が記述されたプログラムソフト135を記憶する領域や、各種のデータを一時的に展開する領域であるデータ展開部137などが設定されている。データ展開部137に展開されるデータとしては、例えば、描画すべきパターンが示される描画データや、描画処理等のプログラムデータなどが挙げられる。
駆動制御部115は、モーター制御部141と、吐出制御部145と、照射制御部147と、昇降制御部149と、表示制御部151と、を有している。
【0043】
モーター制御部141は、CPU113からの指令に基づいて、キャリッジ搬送モーター121の駆動と、ワーク搬送モーター123の駆動とを、個別に制御する。
吐出制御部145は、CPU113からの指令に基づいて、吐出ヘッド33の駆動を制御する。
照射制御部147は、CPU113からの指令に基づいて、照射装置15a及び照射装置15bのそれぞれにおける光源43の発光状態を個別に制御する。
昇降制御部149は、CPU113からの指令に基づいて、昇降モーター44aの駆動と、昇降モーター44bの駆動とを、個別に制御する。
表示制御部151は、CPU113からの指令に基づいて、表示装置131の駆動を制御する。
【0044】
液滴吐出装置1における描画処理について説明する。
液滴吐出装置1では、制御部111が入力装置129から入出力インターフェイス133及びバス119を介して描画データを受け取ると、CPU113によって図6に示す描画処理が開始される。
ここで、描画データは、機能液53(液状体)でワークWに描画すべきパターンを指示するものであり、液滴55で形成すべきドットがビットマップ状に表現されている。ワークWに描画されるパターンは、液滴55で形成される複数のドットの集合として表現される。ワークWへのパターンの描画は、吐出ヘッド33をワークWに対向させた状態で、吐出ヘッド33とワークWとを相対的に往復移動させながら、吐出ヘッド33から液滴55を所定周期で吐出させることによって行われる。
【0045】
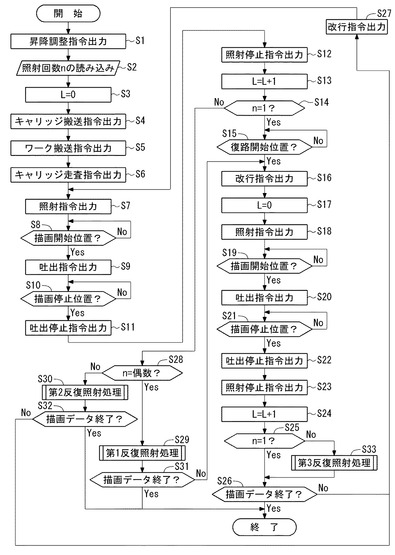
描画処理では、CPU113は、まず、ステップS1において、昇降調整指令を昇降制御部149(図5)に出力する。このとき、昇降制御部149は、昇降モーター44a及び昇降モーター44bの駆動を制御して、照射装置15a及び照射装置15bの高さ位置、すなわち照射装置15とワークWとの間の距離を調整する。
ここで、照射装置15a及び照射装置15bの高さ位置は、ワークWの種類に応じて調整される。ワークWの種類は、ワークWの種類を示すデータ(以下、ワーク種類データと呼ぶ)に基づいて判別される。ワーク種類データは、描画データとともに制御部111に入力される。ワーク種類データが制御部111に入力されると、CPU113は、ワーク種類データに示される情報から、ワークWの種類を判別する。そして、CPU113は、判別したワークWの種類に応じて、昇降調整指令を出力する。
【0046】
ワーク種類データに示されるワークWの種類としては、例えば、ワークWの材質や、ワークWの厚みなど、描画を施すべきワークWに関する種々の情報が含まれる。本実施形態では、ワークWの種類に応じた照射装置15a及び照射装置15bの高さ位置を指示するデータ(以下、高さデータと呼ぶ)が、メモリー部117に格納されている。
ステップS1では、CPU113は、まず、メモリー部117からワークWの種類に応じた高さデータを読み込む。
次いで、CPU113は、読み込んだ高さデータに示される照射装置15a及び照射装置15bの高さ位置を、昇降調整指令にて昇降制御部149に指示する。これにより、照射装置15a及び照射装置15bが、それぞれ、ワークWの種類に応じた高さ位置に調整される。
【0047】
本実施形態では、ワークWの熱特性に応じて、照射装置15a及び照射装置15bのそれぞれの高さ位置が調整される。ワークWの熱特性とは、熱によるワークWの種々の状態や性質の変化を指す。ワークWの熱特性としては、例えば、ワークWの耐熱性が挙げられる。ワークWの耐熱性とは、ワークWがどの程度の熱まで耐え得るかを示す指標である。耐熱性の評価の観点としては、例えば、熱による材質の劣化や、熱による膨張、収縮などが挙げられる。
本実施形態では、ワークWの耐熱性に応じて、照射装置15a及び照射装置15bのそれぞれの高さ位置が調整される。耐熱性が高いワークWでは、耐熱性が低いワークWよりも照射装置15a及び照射装置15bのそれぞれの高さ位置が低くされる。照射装置15a及び照射装置15bの高さ位置を低くすれば、ワークWに照射される紫外光41の単位面積当たりの強度を高めやすくすることができる。このため、紫外光41の照射効率を高めやすくすることができる。
【0048】
逆に、耐熱性が低いワークWでは、耐熱性が高いワークWよりも照射装置15a及び照射装置15bのそれぞれの高さ位置が高くされる。照射装置15a及び照射装置15bの高さ位置を高くすれば、照射装置15a及び照射装置15bをワークWから遠ざけることができる。このため、照射装置15a及び照射装置15bのそれぞれから発せられる熱を、ワークWに伝えにくくすることができる。この結果、ワークWが熱によって劣化することを避けやすくすることができる。ワークWの熱による劣化としては、例えば、ワークWの膨張や収縮、ワークWの変質などが挙げられる。
【0049】
ステップS1に次いで、ステップS2において、CPU113は、照射回数nの値を読み込む。照射回数nは、ワークWに塗布した機能液53に紫外光41を照射するときの照射回数を示す値であり、1以上の整数である。本実施形態では、照射装置15a及び照射装置15bの高さ位置に応じた照射回数nの値が、データとしてメモリー部117に格納されている。なお、以下において、照射回数nの値を示すデータは、照射回数データと呼ばれる。
【0050】
ステップS2では、CPU113は、メモリー部117から照射装置15a及び照射装置15bの高さ位置に応じた照射回数データを読み込んで、照射回数nの値を設定する。
耐熱性が低いワークWでは、耐熱性が高いワークWよりも照射装置15a及び照射装置15bのそれぞれの高さ位置が高くされるので、機能液53に照射される紫外光41の単位面積当たりの強度が低くなる。これに起因して、機能液53が十分に硬化しなくなることが考えられる。
これに対し、本実施形態では、照射装置15a及び照射装置15bの高さ位置に応じて、機能液53に対する紫外光41の照射回数が増やされる。これにより、機能液53に対する紫外光41の照射時間を長くすることができるので、機能液53を十分に硬化させやすくすることができる。
ステップS2に次いで、ステップS3において、CPU113は、変数Lの値をクリアーする。この変数Lは、照射回数をカウントするための変数である。
【0051】
次いで、ステップS4において、CPU113は、キャリッジ搬送指令をモーター制御部141(図5)に出力する。このとき、モーター制御部141は、キャリッジ搬送モーター121の駆動を制御して、キャリッジ7を描画エリアの往路開始位置に移動させる。
ここで、液滴吐出装置1では、描画エリアが設定されている。描画エリアは、図1に示すワークテーブル25によってY方向に沿って描かれる軌跡と、吐出ヘッド33によってX方向に沿って描かれる軌跡とが重なり合う領域である。
そして、往路開始位置は、キャリッジ7を往復移動させるときの往路が開始する位置である。本実施形態では、往路開始位置は、平面視で、描画エリアの外側に位置している。本実施形態では、往路開始位置は、平面視で、描画エリアの支柱65a側に位置している。
次いで、ステップS5において、CPU113は、ワーク搬送指令をモーター制御部141(図5)に出力する。このとき、モーター制御部141は、ワーク搬送モーター123の駆動を制御して、ワークWを描画エリアに移動させる。
【0052】
次いで、ステップS6において、CPU113は、キャリッジ走査指令をモーター制御部141(図5)に出力する。このとき、モーター制御部141は、キャリッジ搬送モーター121の駆動を制御して、キャリッジ7の往復移動を開始させる。
ここで、キャリッジ7の往復移動では、キャリッジ7は、上述した往路開始位置と復路開始位置との間を往復移動する。つまり、往路開始位置から復路開始位置で折り返して往路開始位置に戻る経路がキャリッジ7の1往復である。このため、本実施形態では、往路開始位置から復路開始位置に向かう経路がキャリッジ7の往路である。他方で、復路開始位置から往路開始位置に向かう経路がキャリッジ7の復路である。
なお、復路開始位置は、X方向に描画エリアを挟んで往路開始位置に対峙する位置である。復路開始位置は、平面視で、描画エリアの外側に位置している。このため、往路開始位置と復路開始位置とは、平面視で、描画エリアをX方向に挟んで互いに対峙している。本実施形態では、復路開始位置は、平面視で、描画エリアの支柱65b側に位置している。
【0053】
次いで、ステップS7において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
次いで、ステップS8において、CPU113は、吐出ヘッド33の位置が往路における描画開始位置に到達したか否かを判定する。
ここで、描画開始位置は、描画エリア内で吐出ヘッド33から液滴55の吐出を開始させる位置である。
このとき、吐出ヘッド33の位置が描画開始位置に到達した(Yes)と判定されると、処理がステップS9に移行する。他方で、吐出ヘッド33の位置が描画開始位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画開始位置に到達するまで処理が待機される。
【0054】
次いで、ステップS9において、CPU113は、吐出指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を制御して、描画データに基づいて、各ノズル37から液滴55を吐出させる。これにより、往路での描画が開始される。
次いで、ステップS10において、CPU113は、吐出ヘッド33の位置が描画停止位置に到達したか否かを判定する。
ここで、描画停止位置は、描画エリア内で吐出ヘッド33から液滴55の吐出を停止させる位置である。
このとき、吐出ヘッド33の位置が描画停止位置に到達した(Yes)と判定されると、処理がステップS11に移行する。他方で、吐出ヘッド33の位置が描画停止位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画停止位置に到達するまで処理が待機される。
【0055】
次いで、ステップS11において、CPU113は、吐出停止指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を停止して、各ノズル37からの液滴55の吐出を停止させる。これにより、往路での描画が終了する。
なお、往路での描画では、照射装置15aが吐出ヘッド33に追従するので、往路でワークWに塗布された機能液53に紫外光41が照射される。そして、1回の往路での紫外光41の照射は、照射回数の1回としてカウントされる。また、1回の復路での紫外光41の照射も、照射回数の1回としてカウントされる。
【0056】
次いで、ステップS12において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。
次いで、ステップS13において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS14において、CPU113は、照射回数nの値が1であるか否かを判定する。このとき、照射回数nの値が1である(Yes)と判定されると、処理がステップS15に移行する。他方で、照射回数nの値が1でない(No)と判定されると、処理がステップS28に移行する。ステップS28以降の処理については、後述する。
【0057】
ステップS15では、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS16に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
次いで、ステップS16において、CPU113は、改行指令をモーター制御部141(図5)に出力する。このとき、改行指令を受けたモーター制御部141は、ワーク搬送モーター123の駆動を制御して、ワークWをY方向に移動(改行)させ、ワークWにおいてパターンを描画すべき新たな領域を描画エリアに移動させる。
次いで、ステップS17において、CPU113は、変数Lの値をクリアーする。
【0058】
次いで、ステップS18において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
次いで、ステップS19において、CPU113は、吐出ヘッド33の位置が復路における描画開始位置に到達したか否かを判定する。このとき、吐出ヘッド33の位置が描画開始位置に到達した(Yes)と判定されると、処理がステップS20に移行する。他方で、吐出ヘッド33の位置が描画開始位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画開始位置に到達するまで処理が待機される。
次いで、ステップS20において、CPU113は、吐出指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を制御して、描画データに基づいて、各ノズル37から液滴55を吐出させる。これにより、復路での描画が開始される。
【0059】
次いで、ステップS21において、CPU113は、吐出ヘッド33の位置が復路における描画停止位置に到達したか否かを判定する。このとき、吐出ヘッド33の位置が描画停止位置に到達した(Yes)と判定されると、処理がステップS22に移行する。他方で、吐出ヘッド33の位置が描画停止位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画停止位置に到達するまで処理が待機される。
次いで、ステップS22において、CPU113は、吐出停止指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を停止して、各ノズル37からの液滴55の吐出を停止させる。これにより、復路での描画が終了する。
次いで、ステップS23において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。
【0060】
次いで、ステップS24において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS25において、CPU113は、照射回数nの値が1であるか否かを判定する。このとき、照射回数nの値が1である(Yes)と判定されると、処理がステップS26に移行する。他方で、照射回数nの値が1でない(No)と判定されると、処理がステップS33に移行する。
ステップS3では、CPU113は、後述する第3反復照射処理を実施してから、処理をステップS26に移行させる。
【0061】
ステップS26において、CPU113は、描画データが終了したか否かを判定する。このとき、描画データが終了した(Yes)と判定されると、処理が終了する。他方で、描画データが終了していない(No)と判定されると、処理がステップS27に移行する。
ステップS27では、CPU113は、改行指令をモーター制御部141(図5)に出力してから、処理をステップS7に移行させる。このとき、改行指令を受けたモーター制御部141は、ワーク搬送モーター123の駆動を制御して、ワークWをY方向に移動(改行)させ、ワークWにおいてパターンを描画すべき新たな領域を描画エリアに移動させる。
【0062】
ステップS28では、CPU113は、照射回数nの値が偶数であるか否かを判定する。このとき、照射回数nの値が偶数である(Yes)と判定されると、処理がステップS29に移行する。他方で、照射回数nの値が偶数でない(No)と判定されると、処理がステップS30に移行する。
ステップS29では、CPU113は、後述する第1反復照射処理を実施してから、処理をステップS31に移行させる。
ステップS31において、CPU113は、描画データが終了したか否かを判定する。このとき、描画データが終了した(Yes)と判定されると、処理が終了する。他方で、描画データが終了していない(No)と判定されると、処理がステップS16に移行する。
ステップS30では、CPU113は、後述する第2反復照射処理を実施してから、処理をステップS32に移行させる。
ステップS32において、CPU113は、描画データが終了したか否かを判定する。このとき、描画データが終了した(Yes)と判定されると、処理が終了する。他方で、描画データが終了していない(No)と判定されると、処理がステップS27に移行する。
【0063】
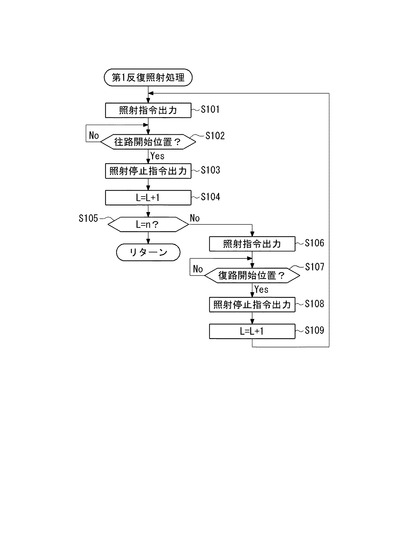
第1反復照射処理では、図7に示すように、ステップS101において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
次いで、ステップS102において、CPU113は、キャリッジ7の位置が往路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が往路開始位置に到達した(Yes)と判定されると、処理がステップS103に移行する。他方で、キャリッジ7の位置が往路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が往路開始位置に到達するまで処理が待機される。
【0064】
次いで、ステップS103において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。これにより、復路での紫外光41の照射が終了する。
次いで、ステップS104において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS105において、CPU113は、変数Lの値が照射回数nの値に等しいか否かを判定する。このとき、変数Lの値が照射回数nの値に等しい(Yes)と判定されると、処理が図6に示す描画処理のステップS31に移行する(リターン)。他方で、変数Lの値が照射回数nの値に等しくない(No)と判定されると、処理がステップS106に移行する。
【0065】
ステップS106において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
次いで、ステップS107において、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS108に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
【0066】
次いで、ステップS108において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。これにより、往路での紫外光41の照射が終了する。
次いで、CPU113は、ステップS109において、変数Lの値を1つだけ繰り上げてから(インクリメント)、処理をステップS101に移行させる。
上記の第1反復照射処理は、照射回数nの値が偶数のときに実施される処理である。照射回数nの値が偶数のときには、キャリッジ7の位置が往路開始位置に戻った状態で、1回の往路での描画に対する紫外光41の照射が終了する。そして、描画データが継続する場合には、往路での描画が繰り返される。つまり、照射回数nの値が偶数のときには、復路の描画が行われない。
【0067】
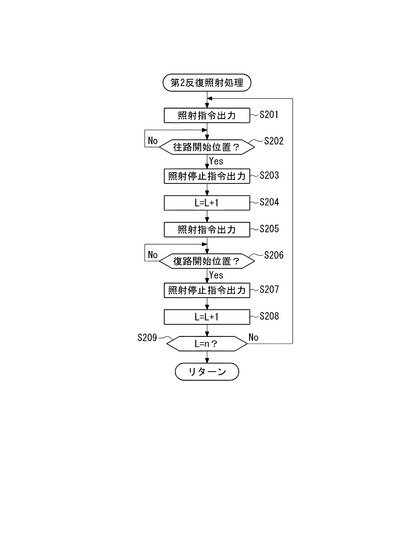
第2反復照射処理では、図8に示すように、ステップS201において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
次いで、ステップS202において、CPU113は、キャリッジ7の位置が往路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が往路開始位置に到達した(Yes)と判定されると、処理がステップS203に移行する。他方で、キャリッジ7の位置が往路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が往路開始位置に到達するまで処理が待機される。
【0068】
次いで、ステップS203において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。これにより、復路での紫外光41の照射が終了する。
次いで、ステップS204において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS205において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
【0069】
次いで、ステップS206において、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS207に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
次いで、ステップS207において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。これにより、往路での紫外光41の照射が終了する。
次いで、ステップS208において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
【0070】
次いで、ステップS209において、CPU113は、変数Lの値が照射回数nの値に等しいか否かを判定する。このとき、変数Lの値が照射回数nの値に等しい(Yes)と判定されると、処理が図6に示す描画処理のステップS32に移行する(リターン)。他方で、変数Lの値が照射回数nの値に等しくない(No)と判定されると、処理がステップS201に移行する。
上記の第2反復照射処理は、照射回数nの値が3以上の奇数のときに実施される処理である。照射回数nの値が奇数のときには、キャリッジ7が復路開始位置に位置した状態で、1回の往路での描画に対する紫外光41の照射が終了する。そして、描画データが継続する場合には、処理が復路での描画に移行する。つまり、照射回数nの値が奇数のときには、往路での描画と復路での描画とが交互に行われる。
【0071】
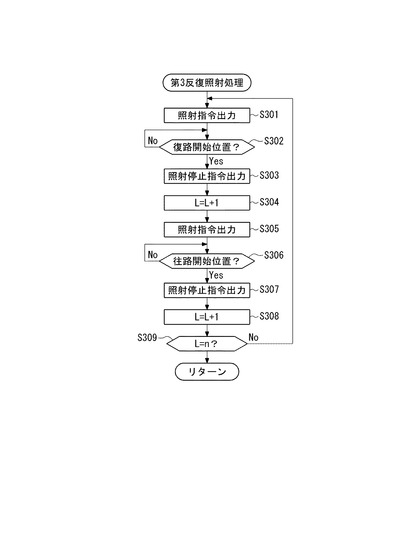
第3反復照射処理では、図9に示すように、ステップS301において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
次いで、ステップS302において、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS303に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
【0072】
次いで、ステップS303において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。これにより、往路での紫外光41の照射が終了する。
次いで、ステップS304において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS305において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
【0073】
次いで、ステップS306において、CPU113は、キャリッジ7の位置が往路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が往路開始位置に到達した(Yes)と判定されると、処理がステップS307に移行する。他方で、キャリッジ7の位置が往路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が往路開始位置に到達するまで処理が待機される。
次いで、ステップS307において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。これにより、復路での紫外光41の照射が終了する。
次いで、ステップS308において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
【0074】
次いで、ステップS309において、CPU113は、変数Lの値が照射回数nの値に等しいか否かを判定する。このとき、変数Lの値が照射回数nの値に等しい(Yes)と判定されると、処理が図6に示す描画処理のステップS26に移行する(リターン)。他方で、変数Lの値が照射回数nの値に等しくない(No)と判定されると、処理がステップS301に移行する。
上記の第3反復照射処理は、1回の復路での描画に対して紫外光41の照射を反復して行う処理であり、照射回数nの値が3以上の奇数のときに実施される処理である。
上記により、ワークWに対する描画が行われる。
【0075】
本実施形態において、液滴吐出装置1が描画装置に対応し、キャリッジ搬送装置11が変位装置に対応し、制御部111が制御部に対応している。また、ステップS1の処理が距離制御工程に対応している。
本実施形態では、ワークWの熱特性に応じて、照射装置15とワークWとの間の距離が調整されるので、照射装置15や光源43から発せられる熱を、ワークWに伝えにくくすることができる。この結果、ワークWが熱によって劣化することを避けやすくすることができる。この結果、このワークWに対する描画品位が損なわれることを抑えやすくすることができる。
また、本実施形態では、照射装置15とワークWとの間の距離に応じて、機能液53に対する紫外光41の照射回数が増やされる。これにより、機能液53に対する紫外光41の照射時間を長くすることができる。このため、照射装置15とワークWとの間の距離を広げたことに起因する紫外光41の照射量の減少を補うことができる。この結果、機能液53の硬化不足を避けやすくすることができるので、描画品位が損なわれることを一層抑えやすくすることができる。
【0076】
なお、本実施形態では、紫外光41の照射回数を増やすことによって機能液53に対する紫外光41の照射時間を長くする方法が採用されている。しかしながら、機能液53に対する紫外光41の照射時間を長くする方法は、これに限定されない。照射時間を長くする方法としては、キャリッジ7の搬送速度を遅くすることによって照射時間を長くする方法も採用され得る。
【0077】
また、本実施形態では、機能液53に対する紫外光41の照射時間を長くすることによって紫外光41の照射量の減少を補う方法が採用されている。しかしながら、紫外光41の照射量の減少を補う方法は、これに限定されない。紫外光41の照射量の減少を補う方法としては、例えば、照射装置15における紫外光41の照射強度を高める方法も採用され得る。照射装置15における紫外光41の照射強度を高めるには、光源43に投入すべき電力を増大させればよい。これにより、機能液53に照射される紫外光41の単位面積当たりの強度が高められるので、機能液53の硬化不足を避けやすくすることができる。
【符号の説明】
【0078】
1…液滴吐出装置、3…ワーク搬送装置、7…キャリッジ、11…キャリッジ搬送装置、15,15a,15b…照射装置、17,17a,17b…昇降装置、33…吐出ヘッド、41…紫外光、43…光源、44,44a,44b…昇降モーター、53…機能液、55…液滴、111…制御部、113…CPU、115…駆動制御部、117…メモリー部、121…キャリッジ搬送モーター、123…ワーク搬送モーター、145…吐出制御部、147…照射制御部、149…昇降制御部、W…ワーク。
【技術分野】
【0001】
本発明は、描画方法、描画装置等に関する。
【背景技術】
【0002】
従来から、紫外光の照射を受けて硬化する液状体をワークに塗布することによって、液状体でワークに描画を行う描画装置が知られている。このような描画装置には、ワークに塗布された液状体に照射する紫外光を発する光源を有するものがある。
ところで、上記のような光源は、一般的に、熱も発する。液状体が塗布されたワークに向けて紫外光を発する光源が発熱すると、光源からの熱でワークが加熱されやすい。このため、例えば、熱によって伸びたり縮んだりしやすいワークである場合、熱によるワークの伸縮によって描画品位が損なわれることがある。
そこで、ワークの温度上昇を軽減するために、ワークを冷却することが考えられる。そして、従来、描画装置の1つであるインクジェットプリンターにおいて、ペルチェ素子で記録媒体(ワーク)を冷却することができるものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−130705号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載された構成によれば、ペルチェ素子でワークを冷却することができるので、描画品位を保ちやすくすることができる。
しかしながら、ペルチェ素子は、一般的に高価である。このため、従来の描画装置では、コストを低減することが困難であるという課題がある。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現され得る。
【0006】
[適用例1]紫外光の照射を受けることによって硬化する液状体を吐出する吐出ヘッドからワークに向けて前記液状体を吐出することによって、前記ワークに前記液状体を塗布する塗布工程と、前記ワークに塗布された前記液状体に対して、前記紫外光を含む光を発する光源により前記光を照射する照射工程と、前記照射工程の前に、前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する距離制御工程と、を有する、ことを特徴とする描画方法。
【0007】
この適用例の描画方法は、塗布工程と、照射工程と、距離制御工程と、を有する。
塗布工程では、液状体を吐出する吐出ヘッドからワークに向けて液状体を吐出することによって、ワークに液状体を塗布する。液状体は、紫外光の照射を受けることによって硬化する性質を有する。
照射工程では、ワークに塗布された液状体に対して、紫外光を含む光を発する光源により光を照射する。これにより、ワークに塗布された液状体を硬化させることができる。
距離制御工程では、ワークの熱特性に応じて光源とワークとの間の距離を制御する。ワークの熱特性とは、熱によるワークの種々の状態や性質の変化を指す。例えば、熱によるワークの伸縮が熱特性の1つである。
この描画方法では、照射工程の前に距離制御工程が行われる。この距離制御工程により、光源からの熱をワークに伝えにくくすることができる。このため、光源からの熱によるワークの特性変化を避けやすくすることができる。この結果、描画品位が損なわれることを抑えやすくすることができる。また、この描画方法によれば、ワークを冷却するためのペルチェ素子などを用いる方法に比較して、描画や装置にかかるコストを低減することができる。
【0008】
[適用例2]上記の描画方法であって、前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に前記光を照射する時間を、前記距離を広げる前よりも長くする、ことを特徴とする描画方法。
【0009】
光源とワークとの間の距離を広げると、液状体が受ける紫外光の照射量が減少する。この適用例では、距離制御工程で距離を広げたときに、照射工程において、液状体に光を照射する時間を、距離を広げる前よりも長くするので、距離を広げたことに起因する紫外光の照射量の減少を補うことができる。この結果、液状体の硬化不足を避けやすくすることができるので、描画品位が損なわれることを一層抑えやすくすることができる。
【0010】
[適用例3]上記の描画方法であって、前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に照射する前記光の強度を、前記距離を広げる前よりも強くする、ことを特徴とする描画方法。
【0011】
光源とワークとの間の距離を広げると、液状体が受ける紫外光の照射量が減少する。この適用例では、距離制御工程で距離を広げたときに、照射工程において、液状体に照射する光の強度を、距離を広げる前よりも強くするので、距離を広げたことに起因する紫外光の照射量の減少を補うことができる。この結果、液状体の硬化不足を避けやすくすることができるので、描画品位が損なわれることを一層抑えやすくすることができる。
【0012】
[適用例4]上記の描画方法であって、前記塗布工程では、前記吐出ヘッドを支持するキャリッジに対する前記ワークの相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、前記照射工程では、前記キャリッジに設けられた前記光源で前記液状体に前記光を照射する、ことを特徴とする描画方法。
【0013】
この適用例では、塗布工程において、吐出ヘッドを支持するキャリッジに対するワークの相対位置を変化させながら、吐出ヘッドから液状体を吐出する。また、照射工程では、キャリッジに設けられた光源で液状体に光を照射する。
この描画方法によれば、キャリッジに対するワークの相対位置を変化させながら、吐出ヘッドから液状体を吐出するときに、光源を吐出ヘッドに追従させることができる。このため、吐出ヘッドから液状体を吐出させながら、ワークに塗布された液状体に光を照射することができる。
【0014】
[適用例5]上記の描画方法であって、前記塗布工程では、少なくとも前記キャリッジを移動させることによって前記相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、前記照射工程では、前記キャリッジの移動方向に前記吐出ヘッドを挟んだそれぞれの箇所に設けられた前記光源で前記液状体に前記光を照射する、ことを特徴とする描画方法。
【0015】
この適用例では、塗布工程では、少なくともキャリッジを移動させることによって相対位置を変化させながら、吐出ヘッドから液状体を吐出する。また、照射工程では、キャリッジの移動方向に吐出ヘッドを挟んだそれぞれの箇所に設けられた光源で液状体に光を照射する。
この描画方法によれば、キャリッジを移動させながら、吐出ヘッドから液状体を吐出するときに、それぞれの光源を吐出ヘッドに追従させることができる。このため、例えばキャリッジを往復移動させるときに往動及び復動のそれぞれにおいて、吐出ヘッドから液状体を吐出させながら、ワークに塗布された順に液状体に光を照射することができる。
【0016】
[適用例6]紫外光の照射を受けることによって硬化する液状体をワークに向けて吐出する吐出ヘッドと、前記ワークに塗布された前記液状体に照射する前記紫外光を含む光を発する光源と、前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する制御部と、を有する、ことを特徴とする描画装置。
【0017】
この適用例の描画装置は、吐出ヘッドと、光源と、制御部と、を有する。
吐出ヘッドは、紫外光の照射を受けることによって硬化する液状体をワークに向けて吐出する。
光源は、ワークに塗布された液状体に照射する紫外光を含む光を発する。
制御部は、ワークの熱特性に応じて光源とワークとの間の距離を制御する。ワークの熱特性とは、熱によるワークの種々の状態や性質の変化を指す。例えば、熱によるワークの伸縮が熱特性の1つである。
上記の構成により、吐出ヘッドでワークに塗布した液状体を、光源からの光を照射することによって硬化させることができる。
また、この描画装置では、制御部によって、ワークの熱特性に応じて光源とワークとの間の距離が制御されるので、光源からの熱をワークに伝えにくくすることができる。このため、光源からの熱によるワークの特性変化を避けやすくすることができる。この結果、描画品位が損なわれることを抑えやすくすることができる。また、この描画装置によれば、ワークを冷却するためのペルチェ素子などに比較して、描画や装置にかかるコストを低減することができる。
【0018】
[適用例7]上記の描画装置であって、前記吐出ヘッドを支持するキャリッジと、前記吐出ヘッドと前記ワークとを互いに対面させた状態で前記キャリッジに対する前記ワークの相対位置を変位させる変位装置と、を有し、前記光源は、前記キャリッジに設けられており、且つ、前記相対位置の変位方向において、前記吐出ヘッドに並んでいる、ことを特徴とする描画装置。
【0019】
この適用例の描画装置は、キャリッジと、変位装置と、を有する。
キャリッジは、吐出ヘッドを支持する。
変位装置は、吐出ヘッドとワークとを互いに対面させた状態でキャリッジに対するワークの相対位置を変位させる。
この描画装置では、光源は、キャリッジに設けられている。また、光源は、相対位置の変位方向において、吐出ヘッドに並んでいる。
上記の構成により、キャリッジに対するワークの相対位置を変位させるときに、光源を吐出ヘッドに追従させることができる。このため、吐出ヘッドから液状体を吐出させながら、ワークに塗布された液状体に光を照射することができる。
【図面の簡単な説明】
【0020】
【図1】本実施形態における液滴吐出装置の概略の構成を示す斜視図。
【図2】本実施形態におけるキャリッジを図1中のA視方向に見たときの正面図。
【図3】本実施形態における吐出ヘッドの底面図。
【図4】図2中のB−B線における断面図。
【図5】本実施形態における液滴吐出装置の概略の構成を示すブロック図。
【図6】本実施形態における描画処理の流れを示す図。
【図7】本実施形態における第1反復照射処理の流れを示す図。
【図8】本実施形態における第2反復照射処理の流れを示す図。
【図9】本実施形態における第3反復照射処理の流れを示す図。
【発明を実施するための形態】
【0021】
図面を参照しながら、描画装置の1つである液滴吐出装置を例に、実施形態について説明する。なお、各図面において、それぞれの構成を認識可能な程度の大きさにするために、構成や部材の縮尺が異なっていることがある。
【0022】
本実施形態における液滴吐出装置1は、概略の構成を示す斜視図である図1に示すように、ワーク搬送装置3と、キャリッジ7と、キャリッジ搬送装置11と、を有している。
また、液滴吐出装置1は、キャリッジ7を図1中のA視方向に見たときの正面図である図2に示すように、ヘッドユニット13と、2個の照射装置15と、2個の昇降装置17と、を有している。
ヘッドユニット13と、2個の照射装置15と、2個の昇降装置17とは、それぞれ、キャリッジ7に設けられている。
図1に示す液滴吐出装置1では、ヘッドユニット13と基板などのワークWとの平面視での相対位置を変化させつつ、ヘッドユニット13から液状体を液滴として吐出させることによって、ワークWに液状体で所望のパターンを描画(記録)することができる。なお、図中のY方向はワークWの移動方向を示し、X方向は平面視でY方向とは直交する方向を示している。また、X方向及びY方向によって規定されるXY平面と直交する方向は、Z方向として規定される。
【0023】
このような液滴吐出装置1は、例えば、樹脂フィルムなどのように、液状体が浸透しにくいワークWへの描画に適用され得る。
また、液滴吐出装置1は、例えば、液晶表示パネル等に用いられるカラーフィルターの製造や、有機EL装置の製造などにも適用され得る。
赤、緑及び青の3色のフィルターエレメントを有するカラーフィルターの場合、液滴吐出装置1は、例えば、基板に赤、緑及び青の各着色層を形成する工程で好適に使用され得る。この場合、ヘッドユニット13から各着色層に対応する各液状体を、ワークWに液滴として吐出させることによって、ワークWに赤、緑及び青のそれぞれのフィルターエレメントのパターンが描画される。
また、有機EL装置の製造では、例えば、赤、緑及び青の画素ごとに、各色に対応する機能層(有機層)を形成する工程で好適に使用され得る。この場合、ヘッドユニット13から各色の機能層に対応する各液状体を、ワークWに液滴として吐出されることによって、ワークWに赤、緑及び青のそれぞれの機能層のパターンが描画される。
記録媒体としてのワークWは、上述した基板や樹脂フィルムなどに限定されず、紙、布、金属箔など、種々の記録媒体が採用され得る。
【0024】
ここで、液滴吐出装置1の各構成について、詳細を説明する。
ワーク搬送装置3は、図1に示すように、定盤21と、ガイドレール23aと、ガイドレール23bと、ワークテーブル25と、を有している。
定盤21は、例えば石などの熱膨張係数が小さい材料で構成されており、Y方向に沿って延びるように据えられている。ガイドレール23a及びガイドレール23bは、定盤21の上面21a上に配設されている。ガイドレール23a及びガイドレール23bは、それぞれ、Y方向に沿って延在している。ガイドレール23aとガイドレール23bとは、互いにX方向に隙間をあけた状態で並んでいる。
【0025】
ワークテーブル25は、ガイドレール23a及びガイドレール23bを挟んで定盤21の上面21aに対向した状態で設けられている。ワークテーブル25は、定盤21から浮いた状態でガイドレール23a及びガイドレール23b上に載置されている。ワークテーブル25は、ワークWが載置される面である載置面25aを有している。載置面25aは、定盤21側とは反対側(上側)に向けられている。ワークテーブル25は、ガイドレール23a及びガイドレール23bによってY方向に沿って案内され、定盤21上をY方向に沿って往復移動可能に構成されている。
【0026】
ワークテーブル25は、図示しない移動機構及び動力源によって、Y方向に往復移動可能に構成されている。移動機構としては、例えば、ボールねじとボールナットとを組み合わせた機構や、リニアガイド機構などが採用され得る。また、本実施形態では、ワークテーブル25をY方向に沿って移動させるための動力源として、後述するワーク搬送モーターが採用されている。ワーク搬送モーターとしては、ステッピングモーター、サーボモーター、リニアモーターなどの種々のモーターが採用され得る。
ワーク搬送モーターからの動力は、移動機構を介してワークテーブル25に伝達される。これにより、ワークテーブル25は、ガイドレール23a及びガイドレール23bに沿って、すなわちY方向に沿って往復移動することができる。つまり、ワーク搬送装置3は、ワークテーブル25の載置面25aに載置されたワークWを、Y方向に沿って往復移動させることができる。
【0027】
ヘッドユニット13は、図2に示すように、ヘッドプレート31と、吐出ヘッド33と、を有している。
吐出ヘッド33は、底面図である図3に示すように、ノズル面35を有している。ノズル面35には、複数のノズル37が形成されている。なお、図3では、ノズル37をわかりやすく示すため、ノズル37が誇張され、且つノズル37の個数が減じられている。
吐出ヘッド33において、複数のノズル37は、Y方向に沿って配列する4本のノズル列39を構成している。4本のノズル列39は、X方向に互いに隙間をあけた状態で並んでいる。各ノズル列39において、複数のノズル37は、Y方向に沿って所定のノズル間隔Pで形成されている。
以下において、4本のノズル列39のそれぞれが識別される場合に、ノズル列39a、ノズル列39b、ノズル列39c及びノズル列39dという表記が用いられる。
吐出ヘッド33において、ノズル列39aとノズル列39bとは、互いにY方向にP/2の距離だけずれている。ノズル列39c及びノズル列39dも、互いにY方向にP/2の距離だけずれている。
【0028】
2個の照射装置15は、図2に示すように、それぞれ、X方向にヘッドユニット13を挟んで互いに対峙する位置に設けられている。以下において、2個の照射装置15のそれぞれを識別する場合に、照射装置15a及び照射装置15bという表記が用いられる。
照射装置15a及び照射装置15bは、それぞれ、紫外光41を発する光源43を有している。光源43からの紫外光41は、吐出ヘッド33から吐出された機能液53(液状体)の硬化を促進させる。機能液53は、紫外光41の照射を受けると、硬化が促進する。
光源43としては、例えば、LED、LD、水銀ランプ、メタルハライドランプ、キセノンランプ、エキシマランプ等の種々の光源43が採用され得る。
なお、本実施形態では、光源43のY方向における長さは、吐出ヘッド33のノズル列39を網羅する長さに設定されている。
なお、照射装置15aの光源43と、照射装置15bの光源43とは、それぞれ、吐出ヘッド33のノズル面35がX方向に沿って描く軌跡に、平面視で重なっている。
【0029】
2個の昇降装置17は、照射装置15a及び照射装置15bのそれぞれに対応して設けられている。以下において、2個の昇降装置17のそれぞれを識別する場合に、昇降装置17a及び昇降装置17bという表記が用いられる。このとき、昇降装置17aが照射装置15aに対応し、昇降装置17bが照射装置15bに対応する。
2個の昇降装置17は、それぞれ、対応する照射装置15を昇降させる。昇降装置17aが照射装置15aを昇降させ、昇降装置17bが照射装置15bを昇降させる。
昇降装置17aは、昇降モーター44aと、昇降機構45aと、を有している。同様に、昇降装置17bは、昇降モーター44bと、昇降機構45bと、を有している。昇降機構45a及び昇降機構45bとしては、それぞれ、例えば、ボールねじとボールナットとを組み合わせた機構や、リニアガイド機構などが採用され得る。
【0030】
昇降モーター44aは、照射装置15aを昇降させるための動力を発生する。昇降モーター44aからの動力は、昇降機構45aを介して照射装置15aに伝達される。これにより、照射装置15aは、Z方向に沿って昇降することができる。
同様に、昇降モーター44bは、照射装置15bを昇降させるための動力を発生する。昇降モーター44bからの動力は、昇降機構45bを介して照射装置15bに伝達される。これにより、照射装置15bは、Z方向に沿って昇降することができる。
なお、昇降モーター44a及び昇降モーター44bとしては、それぞれ、ステッピングモーター、サーボモーター、リニアモーターなどの種々のモーターが採用され得る。
【0031】
吐出ヘッド33は、図2中のB−B線における断面図である図4に示すように、ノズルプレート46と、キャビティープレート47と、振動板48と、複数の圧電素子49と、を有している。
ノズルプレート46は、ノズル面35を有している。複数のノズル37は、ノズルプレート46に設けられている。
キャビティープレート47は、ノズルプレート46のノズル面35とは反対側の面に設けられている。キャビティープレート47には、複数のキャビティー51が形成されている。各キャビティー51は、各ノズル37に対応して設けられており、対応する各ノズル37に連通している。各キャビティー51には、図示しないタンクから機能液53が供給される。
【0032】
振動板48は、キャビティープレート47のノズルプレート46側とは反対側の面に設けられている。振動板48は、Z方向に振動(縦振動)することによって、キャビティー51内の容積を拡大したり、縮小したりする。
複数の圧電素子49は、それぞれ、振動板48のキャビティープレート47側とは反対側の面に設けられている。各圧電素子49は、各キャビティー51に対応して設けられており、振動板48を挟んで各キャビティー51に対向している。各圧電素子49は、駆動信号に基づいて、伸長する。これにより、振動板48がキャビティー51内の容積を縮小させる。このとき、キャビティー51内の機能液53に圧力が付与される。その結果、ノズル37から、機能液53が液滴55として吐出される。吐出ヘッド33による液滴55の吐出法は、インクジェット法の1つである。インクジェット法は、塗布法の1つである。
【0033】
上記の構成を有する吐出ヘッド33は、図2に示すように、ノズル面35がヘッドプレート31から突出した状態で、ヘッドプレート31に支持されている。
キャリッジ7は、図2に示すように、ヘッドユニット13を支持している。ここで、ヘッドユニット13は、ノズル面35がZ方向の下方に向けられた状態でキャリッジ7に支持されている。
上記により、ワークWには、吐出ヘッド33から機能液53が塗布され得る。
なお、本実施形態では、縦振動型の圧電素子49が採用されているが、機能液53に圧力を付与するための加圧手段は、これに限定されず、例えば、下電極と圧電体層と上電極とを積層形成した撓み変形型の圧電素子も採用され得る。また、加圧手段としては、振動板と電極との間に静電気を発生させて、静電気力によって振動板を変形させてノズルから液滴55を吐出させるいわゆる静電式アクチュエーターなども採用され得る。さらに、発熱体を用いてノズル内に泡を発生させ、その泡によって機能液53に圧力を付与する構成も採用され得る。
【0034】
本実施形態では、機能液53として、光の照射を受けることによって硬化が促進する機能液53が採用されている。本実施形態では、機能液53の硬化を促進させる光として紫外光41が採用されている。
機能液53は、樹脂材料、光重合開始剤及び溶媒を、成分として含んでいる。これらの成分に、顔料や染料等の色素や、親液性や撥液性等の表面改質材料などの機能性材料を添加することによって固有の機能を有する機能液53を生成することができる。顔料や染料等の色素を含有する機能液53は、例えば、ワークWに描画する画像を形成するための機能液53として採用され得る。以下において、ワークWに描画する画像を形成するための機能液53は、画像塗料と呼ばれる。
【0035】
また、機能液53の成分としての樹脂材料に、例えば、アクリル系の樹脂材料などの光透過性を有する樹脂材料を採用することによって、光透過性を有する機能液53を構成することができる。このような光透過性を有する機能液53は、例えば、クリアインクとしての用途が考えられる。以下において、光透過性を有する機能液53は、透光塗料と呼ばれる。
クリアインクの用途としては、例えば、画像を被覆するオーバーコート層としての用途や、画像を形成する前の下地層としての用途などが考えられる。以下において、下地層として適用される機能液53は、下地塗料と呼ばれる。
下地塗料としては、透光塗料だけでなく、透光塗料に種々の顔料を添加した機能液53を採用することもできる。例えば、白色を呈する機能液53や、金属的な光沢(メタリック)を示す機能液53なども、下地塗料として採用され得る。
【0036】
機能液53における樹脂材料は、樹脂膜を形成する材料である。このような樹脂材料としては、常温で液状であり、重合させることによってポリマーとなる材料であれば特に限定されない。樹脂材料としては、粘性が小さいものが好ましく、オリゴマーの形態であるのが好ましい。さらに、樹脂材料としては、モノマーの形態であることが一層好ましい。
光重合開始剤は、ポリマーの架橋性基に作用して架橋反応を進行させる添加剤である。光重合開始剤としては、例えば、ベンジルジメチルケタールなどが採用され得る。本実施形態では、光重合開始剤として、ラジカル型の光重合開始剤が採用されている。ラジカル型の光重合開始剤としては、例えば、チバ・ジャパン(株)社製のイルガキュア819などが採用され得る。
溶媒は、樹脂材料の粘度を調整するためのものである。
【0037】
キャリッジ搬送装置11は、図1に示すように、架台61と、ガイドレール63と、を有している。
架台61は、X方向に延在しており、ワーク搬送装置3をX方向にまたいでいる。架台61は、ワークテーブル25の定盤21側とは反対側で、ワーク搬送装置3に対向している。架台61は、一対の支柱65によって支持されている。一対の支柱65は、定盤21を挟んでX方向に互いに対峙する位置に設けられている。
なお、以下においては、一対の支柱65のそれぞれを識別する場合に、支柱65a及び支柱65bという表記が用いられる。支柱65a及び支柱65bは、それぞれ、ワークテーブル25よりもZ方向の上方に突出している。これにより、架台61とワークテーブル25との間には、隙間が保たれている。
【0038】
ガイドレール63は、架台61の定盤21側に設けられている。ガイドレール63は、X方向に沿って延在しており、架台61のX方向における幅にわたって設けられている。
前述したキャリッジ7は、ガイドレール63に支持されている。キャリッジ7がガイドレール63に支持された状態において、吐出ヘッド33のノズル面35は、Z方向においてワークテーブル25側に向いている。キャリッジ7は、ガイドレール63によってX方向に沿って案内され、X方向に往復移動可能な状態でガイドレール63に支持されている。なお、平面視で、キャリッジ7がワークテーブル25に重なっている状態において、ノズル面35とワークテーブル25の載置面25aとは、互いに隙間を保った状態で対向する。
【0039】
キャリッジ7は、図示しない移動機構及び動力源によって、X方向に往復移動可能に構成されている。移動機構としては、例えば、ボールねじとボールナットとを組み合わせた機構や、リニアガイド機構などが採用され得る。また、キャリッジ搬送装置11は、キャリッジ7をX方向に沿って移動させるための動力源として、図示しないキャリッジ搬送モーターを有している。キャリッジ搬送モーターとしては、ステッピングモーター、サーボモーター、リニアモーターなどの種々のモーターが採用され得る。
キャリッジ搬送モーターからの動力は、移動機構を介してキャリッジ7に伝達される。これにより、キャリッジ7は、ガイドレール63に沿って、すなわちX方向に沿って往復移動することができる。つまり、キャリッジ搬送装置11は、キャリッジ7に支持されたヘッドユニット13を、X方向に沿って往復移動させることができる。
上記の構成を有する液滴吐出装置1では、吐出ヘッド33をワークWに対面させた状態で、吐出ヘッド33とワークWとを相対的に往復移動させながら、吐出ヘッド33から液滴55を吐出させることによって、ワークWへのパターンの描画が行われる。
【0040】
液滴吐出装置1は、図5に示すように、上記の各構成の動作を制御する制御部111を有している。制御部111は、CPU(Central Processing Unit)113と、駆動制御部115と、メモリー部117と、を有している。駆動制御部115及びメモリー部117は、バス119を介してCPU113に接続されている。
また、液滴吐出装置1は、キャリッジ搬送モーター121と、ワーク搬送モーター123と、入力装置129と、表示装置131と、を有している。
キャリッジ搬送モーター121及びワーク搬送モーター123は、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。また、入力装置129及び表示装置131も、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。
【0041】
キャリッジ搬送モーター121は、キャリッジ7を駆動するための動力を発生させる。ワーク搬送モーター123は、ワークテーブル25を駆動するための動力を発生させる。
入力装置129は、各種の加工条件を入力する装置である。表示装置131は、加工条件や、作業状況を表示する装置である。液滴吐出装置1を操作するオペレーターは、表示装置131に表示される情報を確認しながら、入力装置129を介して種々の情報を入力することができる。
なお、吐出ヘッド33、照射装置15a及び照射装置15bも、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。また、昇降モーター44a及び昇降モーター44bも、それぞれ、入出力インターフェイス133とバス119とを介して制御部111に接続されている。
【0042】
CPU113は、プロセッサーとして各種の演算処理を行う。駆動制御部115は、各構成の駆動を制御する。メモリー部117は、RAM(Random Access Memory)や、ROM(Read Only Memory)などを含んでいる。メモリー部117には、液滴吐出装置1における動作の制御手順が記述されたプログラムソフト135を記憶する領域や、各種のデータを一時的に展開する領域であるデータ展開部137などが設定されている。データ展開部137に展開されるデータとしては、例えば、描画すべきパターンが示される描画データや、描画処理等のプログラムデータなどが挙げられる。
駆動制御部115は、モーター制御部141と、吐出制御部145と、照射制御部147と、昇降制御部149と、表示制御部151と、を有している。
【0043】
モーター制御部141は、CPU113からの指令に基づいて、キャリッジ搬送モーター121の駆動と、ワーク搬送モーター123の駆動とを、個別に制御する。
吐出制御部145は、CPU113からの指令に基づいて、吐出ヘッド33の駆動を制御する。
照射制御部147は、CPU113からの指令に基づいて、照射装置15a及び照射装置15bのそれぞれにおける光源43の発光状態を個別に制御する。
昇降制御部149は、CPU113からの指令に基づいて、昇降モーター44aの駆動と、昇降モーター44bの駆動とを、個別に制御する。
表示制御部151は、CPU113からの指令に基づいて、表示装置131の駆動を制御する。
【0044】
液滴吐出装置1における描画処理について説明する。
液滴吐出装置1では、制御部111が入力装置129から入出力インターフェイス133及びバス119を介して描画データを受け取ると、CPU113によって図6に示す描画処理が開始される。
ここで、描画データは、機能液53(液状体)でワークWに描画すべきパターンを指示するものであり、液滴55で形成すべきドットがビットマップ状に表現されている。ワークWに描画されるパターンは、液滴55で形成される複数のドットの集合として表現される。ワークWへのパターンの描画は、吐出ヘッド33をワークWに対向させた状態で、吐出ヘッド33とワークWとを相対的に往復移動させながら、吐出ヘッド33から液滴55を所定周期で吐出させることによって行われる。
【0045】
描画処理では、CPU113は、まず、ステップS1において、昇降調整指令を昇降制御部149(図5)に出力する。このとき、昇降制御部149は、昇降モーター44a及び昇降モーター44bの駆動を制御して、照射装置15a及び照射装置15bの高さ位置、すなわち照射装置15とワークWとの間の距離を調整する。
ここで、照射装置15a及び照射装置15bの高さ位置は、ワークWの種類に応じて調整される。ワークWの種類は、ワークWの種類を示すデータ(以下、ワーク種類データと呼ぶ)に基づいて判別される。ワーク種類データは、描画データとともに制御部111に入力される。ワーク種類データが制御部111に入力されると、CPU113は、ワーク種類データに示される情報から、ワークWの種類を判別する。そして、CPU113は、判別したワークWの種類に応じて、昇降調整指令を出力する。
【0046】
ワーク種類データに示されるワークWの種類としては、例えば、ワークWの材質や、ワークWの厚みなど、描画を施すべきワークWに関する種々の情報が含まれる。本実施形態では、ワークWの種類に応じた照射装置15a及び照射装置15bの高さ位置を指示するデータ(以下、高さデータと呼ぶ)が、メモリー部117に格納されている。
ステップS1では、CPU113は、まず、メモリー部117からワークWの種類に応じた高さデータを読み込む。
次いで、CPU113は、読み込んだ高さデータに示される照射装置15a及び照射装置15bの高さ位置を、昇降調整指令にて昇降制御部149に指示する。これにより、照射装置15a及び照射装置15bが、それぞれ、ワークWの種類に応じた高さ位置に調整される。
【0047】
本実施形態では、ワークWの熱特性に応じて、照射装置15a及び照射装置15bのそれぞれの高さ位置が調整される。ワークWの熱特性とは、熱によるワークWの種々の状態や性質の変化を指す。ワークWの熱特性としては、例えば、ワークWの耐熱性が挙げられる。ワークWの耐熱性とは、ワークWがどの程度の熱まで耐え得るかを示す指標である。耐熱性の評価の観点としては、例えば、熱による材質の劣化や、熱による膨張、収縮などが挙げられる。
本実施形態では、ワークWの耐熱性に応じて、照射装置15a及び照射装置15bのそれぞれの高さ位置が調整される。耐熱性が高いワークWでは、耐熱性が低いワークWよりも照射装置15a及び照射装置15bのそれぞれの高さ位置が低くされる。照射装置15a及び照射装置15bの高さ位置を低くすれば、ワークWに照射される紫外光41の単位面積当たりの強度を高めやすくすることができる。このため、紫外光41の照射効率を高めやすくすることができる。
【0048】
逆に、耐熱性が低いワークWでは、耐熱性が高いワークWよりも照射装置15a及び照射装置15bのそれぞれの高さ位置が高くされる。照射装置15a及び照射装置15bの高さ位置を高くすれば、照射装置15a及び照射装置15bをワークWから遠ざけることができる。このため、照射装置15a及び照射装置15bのそれぞれから発せられる熱を、ワークWに伝えにくくすることができる。この結果、ワークWが熱によって劣化することを避けやすくすることができる。ワークWの熱による劣化としては、例えば、ワークWの膨張や収縮、ワークWの変質などが挙げられる。
【0049】
ステップS1に次いで、ステップS2において、CPU113は、照射回数nの値を読み込む。照射回数nは、ワークWに塗布した機能液53に紫外光41を照射するときの照射回数を示す値であり、1以上の整数である。本実施形態では、照射装置15a及び照射装置15bの高さ位置に応じた照射回数nの値が、データとしてメモリー部117に格納されている。なお、以下において、照射回数nの値を示すデータは、照射回数データと呼ばれる。
【0050】
ステップS2では、CPU113は、メモリー部117から照射装置15a及び照射装置15bの高さ位置に応じた照射回数データを読み込んで、照射回数nの値を設定する。
耐熱性が低いワークWでは、耐熱性が高いワークWよりも照射装置15a及び照射装置15bのそれぞれの高さ位置が高くされるので、機能液53に照射される紫外光41の単位面積当たりの強度が低くなる。これに起因して、機能液53が十分に硬化しなくなることが考えられる。
これに対し、本実施形態では、照射装置15a及び照射装置15bの高さ位置に応じて、機能液53に対する紫外光41の照射回数が増やされる。これにより、機能液53に対する紫外光41の照射時間を長くすることができるので、機能液53を十分に硬化させやすくすることができる。
ステップS2に次いで、ステップS3において、CPU113は、変数Lの値をクリアーする。この変数Lは、照射回数をカウントするための変数である。
【0051】
次いで、ステップS4において、CPU113は、キャリッジ搬送指令をモーター制御部141(図5)に出力する。このとき、モーター制御部141は、キャリッジ搬送モーター121の駆動を制御して、キャリッジ7を描画エリアの往路開始位置に移動させる。
ここで、液滴吐出装置1では、描画エリアが設定されている。描画エリアは、図1に示すワークテーブル25によってY方向に沿って描かれる軌跡と、吐出ヘッド33によってX方向に沿って描かれる軌跡とが重なり合う領域である。
そして、往路開始位置は、キャリッジ7を往復移動させるときの往路が開始する位置である。本実施形態では、往路開始位置は、平面視で、描画エリアの外側に位置している。本実施形態では、往路開始位置は、平面視で、描画エリアの支柱65a側に位置している。
次いで、ステップS5において、CPU113は、ワーク搬送指令をモーター制御部141(図5)に出力する。このとき、モーター制御部141は、ワーク搬送モーター123の駆動を制御して、ワークWを描画エリアに移動させる。
【0052】
次いで、ステップS6において、CPU113は、キャリッジ走査指令をモーター制御部141(図5)に出力する。このとき、モーター制御部141は、キャリッジ搬送モーター121の駆動を制御して、キャリッジ7の往復移動を開始させる。
ここで、キャリッジ7の往復移動では、キャリッジ7は、上述した往路開始位置と復路開始位置との間を往復移動する。つまり、往路開始位置から復路開始位置で折り返して往路開始位置に戻る経路がキャリッジ7の1往復である。このため、本実施形態では、往路開始位置から復路開始位置に向かう経路がキャリッジ7の往路である。他方で、復路開始位置から往路開始位置に向かう経路がキャリッジ7の復路である。
なお、復路開始位置は、X方向に描画エリアを挟んで往路開始位置に対峙する位置である。復路開始位置は、平面視で、描画エリアの外側に位置している。このため、往路開始位置と復路開始位置とは、平面視で、描画エリアをX方向に挟んで互いに対峙している。本実施形態では、復路開始位置は、平面視で、描画エリアの支柱65b側に位置している。
【0053】
次いで、ステップS7において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
次いで、ステップS8において、CPU113は、吐出ヘッド33の位置が往路における描画開始位置に到達したか否かを判定する。
ここで、描画開始位置は、描画エリア内で吐出ヘッド33から液滴55の吐出を開始させる位置である。
このとき、吐出ヘッド33の位置が描画開始位置に到達した(Yes)と判定されると、処理がステップS9に移行する。他方で、吐出ヘッド33の位置が描画開始位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画開始位置に到達するまで処理が待機される。
【0054】
次いで、ステップS9において、CPU113は、吐出指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を制御して、描画データに基づいて、各ノズル37から液滴55を吐出させる。これにより、往路での描画が開始される。
次いで、ステップS10において、CPU113は、吐出ヘッド33の位置が描画停止位置に到達したか否かを判定する。
ここで、描画停止位置は、描画エリア内で吐出ヘッド33から液滴55の吐出を停止させる位置である。
このとき、吐出ヘッド33の位置が描画停止位置に到達した(Yes)と判定されると、処理がステップS11に移行する。他方で、吐出ヘッド33の位置が描画停止位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画停止位置に到達するまで処理が待機される。
【0055】
次いで、ステップS11において、CPU113は、吐出停止指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を停止して、各ノズル37からの液滴55の吐出を停止させる。これにより、往路での描画が終了する。
なお、往路での描画では、照射装置15aが吐出ヘッド33に追従するので、往路でワークWに塗布された機能液53に紫外光41が照射される。そして、1回の往路での紫外光41の照射は、照射回数の1回としてカウントされる。また、1回の復路での紫外光41の照射も、照射回数の1回としてカウントされる。
【0056】
次いで、ステップS12において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。
次いで、ステップS13において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS14において、CPU113は、照射回数nの値が1であるか否かを判定する。このとき、照射回数nの値が1である(Yes)と判定されると、処理がステップS15に移行する。他方で、照射回数nの値が1でない(No)と判定されると、処理がステップS28に移行する。ステップS28以降の処理については、後述する。
【0057】
ステップS15では、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS16に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
次いで、ステップS16において、CPU113は、改行指令をモーター制御部141(図5)に出力する。このとき、改行指令を受けたモーター制御部141は、ワーク搬送モーター123の駆動を制御して、ワークWをY方向に移動(改行)させ、ワークWにおいてパターンを描画すべき新たな領域を描画エリアに移動させる。
次いで、ステップS17において、CPU113は、変数Lの値をクリアーする。
【0058】
次いで、ステップS18において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
次いで、ステップS19において、CPU113は、吐出ヘッド33の位置が復路における描画開始位置に到達したか否かを判定する。このとき、吐出ヘッド33の位置が描画開始位置に到達した(Yes)と判定されると、処理がステップS20に移行する。他方で、吐出ヘッド33の位置が描画開始位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画開始位置に到達するまで処理が待機される。
次いで、ステップS20において、CPU113は、吐出指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を制御して、描画データに基づいて、各ノズル37から液滴55を吐出させる。これにより、復路での描画が開始される。
【0059】
次いで、ステップS21において、CPU113は、吐出ヘッド33の位置が復路における描画停止位置に到達したか否かを判定する。このとき、吐出ヘッド33の位置が描画停止位置に到達した(Yes)と判定されると、処理がステップS22に移行する。他方で、吐出ヘッド33の位置が描画停止位置に到達していない(No)と判定されると、吐出ヘッド33の位置が描画停止位置に到達するまで処理が待機される。
次いで、ステップS22において、CPU113は、吐出停止指令を吐出制御部145(図5)に出力する。このとき、吐出制御部145は、吐出ヘッド33の駆動を停止して、各ノズル37からの液滴55の吐出を停止させる。これにより、復路での描画が終了する。
次いで、ステップS23において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。
【0060】
次いで、ステップS24において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS25において、CPU113は、照射回数nの値が1であるか否かを判定する。このとき、照射回数nの値が1である(Yes)と判定されると、処理がステップS26に移行する。他方で、照射回数nの値が1でない(No)と判定されると、処理がステップS33に移行する。
ステップS3では、CPU113は、後述する第3反復照射処理を実施してから、処理をステップS26に移行させる。
【0061】
ステップS26において、CPU113は、描画データが終了したか否かを判定する。このとき、描画データが終了した(Yes)と判定されると、処理が終了する。他方で、描画データが終了していない(No)と判定されると、処理がステップS27に移行する。
ステップS27では、CPU113は、改行指令をモーター制御部141(図5)に出力してから、処理をステップS7に移行させる。このとき、改行指令を受けたモーター制御部141は、ワーク搬送モーター123の駆動を制御して、ワークWをY方向に移動(改行)させ、ワークWにおいてパターンを描画すべき新たな領域を描画エリアに移動させる。
【0062】
ステップS28では、CPU113は、照射回数nの値が偶数であるか否かを判定する。このとき、照射回数nの値が偶数である(Yes)と判定されると、処理がステップS29に移行する。他方で、照射回数nの値が偶数でない(No)と判定されると、処理がステップS30に移行する。
ステップS29では、CPU113は、後述する第1反復照射処理を実施してから、処理をステップS31に移行させる。
ステップS31において、CPU113は、描画データが終了したか否かを判定する。このとき、描画データが終了した(Yes)と判定されると、処理が終了する。他方で、描画データが終了していない(No)と判定されると、処理がステップS16に移行する。
ステップS30では、CPU113は、後述する第2反復照射処理を実施してから、処理をステップS32に移行させる。
ステップS32において、CPU113は、描画データが終了したか否かを判定する。このとき、描画データが終了した(Yes)と判定されると、処理が終了する。他方で、描画データが終了していない(No)と判定されると、処理がステップS27に移行する。
【0063】
第1反復照射処理では、図7に示すように、ステップS101において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
次いで、ステップS102において、CPU113は、キャリッジ7の位置が往路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が往路開始位置に到達した(Yes)と判定されると、処理がステップS103に移行する。他方で、キャリッジ7の位置が往路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が往路開始位置に到達するまで処理が待機される。
【0064】
次いで、ステップS103において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。これにより、復路での紫外光41の照射が終了する。
次いで、ステップS104において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS105において、CPU113は、変数Lの値が照射回数nの値に等しいか否かを判定する。このとき、変数Lの値が照射回数nの値に等しい(Yes)と判定されると、処理が図6に示す描画処理のステップS31に移行する(リターン)。他方で、変数Lの値が照射回数nの値に等しくない(No)と判定されると、処理がステップS106に移行する。
【0065】
ステップS106において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
次いで、ステップS107において、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS108に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
【0066】
次いで、ステップS108において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。これにより、往路での紫外光41の照射が終了する。
次いで、CPU113は、ステップS109において、変数Lの値を1つだけ繰り上げてから(インクリメント)、処理をステップS101に移行させる。
上記の第1反復照射処理は、照射回数nの値が偶数のときに実施される処理である。照射回数nの値が偶数のときには、キャリッジ7の位置が往路開始位置に戻った状態で、1回の往路での描画に対する紫外光41の照射が終了する。そして、描画データが継続する場合には、往路での描画が繰り返される。つまり、照射回数nの値が偶数のときには、復路の描画が行われない。
【0067】
第2反復照射処理では、図8に示すように、ステップS201において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
次いで、ステップS202において、CPU113は、キャリッジ7の位置が往路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が往路開始位置に到達した(Yes)と判定されると、処理がステップS203に移行する。他方で、キャリッジ7の位置が往路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が往路開始位置に到達するまで処理が待機される。
【0068】
次いで、ステップS203において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。これにより、復路での紫外光41の照射が終了する。
次いで、ステップS204において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS205において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
【0069】
次いで、ステップS206において、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS207に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
次いで、ステップS207において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。これにより、往路での紫外光41の照射が終了する。
次いで、ステップS208において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
【0070】
次いで、ステップS209において、CPU113は、変数Lの値が照射回数nの値に等しいか否かを判定する。このとき、変数Lの値が照射回数nの値に等しい(Yes)と判定されると、処理が図6に示す描画処理のステップS32に移行する(リターン)。他方で、変数Lの値が照射回数nの値に等しくない(No)と判定されると、処理がステップS201に移行する。
上記の第2反復照射処理は、照射回数nの値が3以上の奇数のときに実施される処理である。照射回数nの値が奇数のときには、キャリッジ7が復路開始位置に位置した状態で、1回の往路での描画に対する紫外光41の照射が終了する。そして、描画データが継続する場合には、処理が復路での描画に移行する。つまり、照射回数nの値が奇数のときには、往路での描画と復路での描画とが交互に行われる。
【0071】
第3反復照射処理では、図9に示すように、ステップS301において、CPU113は、照射装置15aに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を点灯させる。
次いで、ステップS302において、CPU113は、キャリッジ7の位置が復路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が復路開始位置に到達した(Yes)と判定されると、処理がステップS303に移行する。他方で、キャリッジ7の位置が復路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が復路開始位置に到達するまで処理が待機される。
【0072】
次いで、ステップS303において、CPU113は、照射装置15aに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15aの光源43の駆動を制御して、照射装置15aの光源43を消灯させる。これにより、往路での紫外光41の照射が終了する。
次いで、ステップS304において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
次いで、ステップS305において、CPU113は、照射装置15bに対する照射指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を点灯させる。
【0073】
次いで、ステップS306において、CPU113は、キャリッジ7の位置が往路開始位置に到達したか否かを判定する。このとき、キャリッジ7の位置が往路開始位置に到達した(Yes)と判定されると、処理がステップS307に移行する。他方で、キャリッジ7の位置が往路開始位置に到達していない(No)と判定されると、キャリッジ7の位置が往路開始位置に到達するまで処理が待機される。
次いで、ステップS307において、CPU113は、照射装置15bに対する照射停止指令を照射制御部147(図5)に出力する。このとき、照射制御部147は、照射装置15bの光源43の駆動を制御して、照射装置15bの光源43を消灯させる。これにより、復路での紫外光41の照射が終了する。
次いで、ステップS308において、CPU113は、変数Lの値を1つだけ繰り上げる(インクリメント)。
【0074】
次いで、ステップS309において、CPU113は、変数Lの値が照射回数nの値に等しいか否かを判定する。このとき、変数Lの値が照射回数nの値に等しい(Yes)と判定されると、処理が図6に示す描画処理のステップS26に移行する(リターン)。他方で、変数Lの値が照射回数nの値に等しくない(No)と判定されると、処理がステップS301に移行する。
上記の第3反復照射処理は、1回の復路での描画に対して紫外光41の照射を反復して行う処理であり、照射回数nの値が3以上の奇数のときに実施される処理である。
上記により、ワークWに対する描画が行われる。
【0075】
本実施形態において、液滴吐出装置1が描画装置に対応し、キャリッジ搬送装置11が変位装置に対応し、制御部111が制御部に対応している。また、ステップS1の処理が距離制御工程に対応している。
本実施形態では、ワークWの熱特性に応じて、照射装置15とワークWとの間の距離が調整されるので、照射装置15や光源43から発せられる熱を、ワークWに伝えにくくすることができる。この結果、ワークWが熱によって劣化することを避けやすくすることができる。この結果、このワークWに対する描画品位が損なわれることを抑えやすくすることができる。
また、本実施形態では、照射装置15とワークWとの間の距離に応じて、機能液53に対する紫外光41の照射回数が増やされる。これにより、機能液53に対する紫外光41の照射時間を長くすることができる。このため、照射装置15とワークWとの間の距離を広げたことに起因する紫外光41の照射量の減少を補うことができる。この結果、機能液53の硬化不足を避けやすくすることができるので、描画品位が損なわれることを一層抑えやすくすることができる。
【0076】
なお、本実施形態では、紫外光41の照射回数を増やすことによって機能液53に対する紫外光41の照射時間を長くする方法が採用されている。しかしながら、機能液53に対する紫外光41の照射時間を長くする方法は、これに限定されない。照射時間を長くする方法としては、キャリッジ7の搬送速度を遅くすることによって照射時間を長くする方法も採用され得る。
【0077】
また、本実施形態では、機能液53に対する紫外光41の照射時間を長くすることによって紫外光41の照射量の減少を補う方法が採用されている。しかしながら、紫外光41の照射量の減少を補う方法は、これに限定されない。紫外光41の照射量の減少を補う方法としては、例えば、照射装置15における紫外光41の照射強度を高める方法も採用され得る。照射装置15における紫外光41の照射強度を高めるには、光源43に投入すべき電力を増大させればよい。これにより、機能液53に照射される紫外光41の単位面積当たりの強度が高められるので、機能液53の硬化不足を避けやすくすることができる。
【符号の説明】
【0078】
1…液滴吐出装置、3…ワーク搬送装置、7…キャリッジ、11…キャリッジ搬送装置、15,15a,15b…照射装置、17,17a,17b…昇降装置、33…吐出ヘッド、41…紫外光、43…光源、44,44a,44b…昇降モーター、53…機能液、55…液滴、111…制御部、113…CPU、115…駆動制御部、117…メモリー部、121…キャリッジ搬送モーター、123…ワーク搬送モーター、145…吐出制御部、147…照射制御部、149…昇降制御部、W…ワーク。
【特許請求の範囲】
【請求項1】
紫外光の照射を受けることによって硬化する液状体を吐出する吐出ヘッドからワークに向けて前記液状体を吐出することによって、前記ワークに前記液状体を塗布する塗布工程と、
前記ワークに塗布された前記液状体に対して、前記紫外光を含む光を発する光源により前記光を照射する照射工程と、
前記照射工程の前に、前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する距離制御工程と、を有する、
ことを特徴とする描画方法。
【請求項2】
前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に前記光を照射する時間を、前記距離を広げる前よりも長くする、
ことを特徴とする請求項1に記載の描画方法。
【請求項3】
前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に照射する前記光の強度を、前記距離を広げる前よりも強くする、
ことを特徴とする請求項1に記載の描画方法。
【請求項4】
前記塗布工程では、前記吐出ヘッドを支持するキャリッジに対する前記ワークの相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、
前記照射工程では、前記キャリッジに設けられた前記光源で前記液状体に前記光を照射する、
ことを特徴とする請求項1乃至3のいずれか一項に記載の描画方法。
【請求項5】
前記塗布工程では、少なくとも前記キャリッジを移動させることによって前記相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、
前記照射工程では、前記キャリッジの移動方向に前記吐出ヘッドを挟んだそれぞれの箇所に設けられた前記光源で前記液状体に前記光を照射する、
ことを特徴とする請求項4に記載の描画方法。
【請求項6】
紫外光の照射を受けることによって硬化する液状体をワークに向けて吐出する吐出ヘッドと、
前記ワークに塗布された前記液状体に照射する前記紫外光を含む光を発する光源と、
前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する制御部と、を有する、
ことを特徴とする描画装置。
【請求項7】
前記吐出ヘッドを支持するキャリッジと、
前記吐出ヘッドと前記ワークとを互いに対面させた状態で前記キャリッジに対する前記ワークの相対位置を変位させる変位装置と、を有し、
前記光源は、前記キャリッジに設けられており、且つ、前記相対位置の変位方向において、前記吐出ヘッドに並んでいる、
ことを特徴とする請求項6に記載の描画装置。
【請求項1】
紫外光の照射を受けることによって硬化する液状体を吐出する吐出ヘッドからワークに向けて前記液状体を吐出することによって、前記ワークに前記液状体を塗布する塗布工程と、
前記ワークに塗布された前記液状体に対して、前記紫外光を含む光を発する光源により前記光を照射する照射工程と、
前記照射工程の前に、前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する距離制御工程と、を有する、
ことを特徴とする描画方法。
【請求項2】
前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に前記光を照射する時間を、前記距離を広げる前よりも長くする、
ことを特徴とする請求項1に記載の描画方法。
【請求項3】
前記距離制御工程で前記距離を広げたときに、前記照射工程では、前記液状体に照射する前記光の強度を、前記距離を広げる前よりも強くする、
ことを特徴とする請求項1に記載の描画方法。
【請求項4】
前記塗布工程では、前記吐出ヘッドを支持するキャリッジに対する前記ワークの相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、
前記照射工程では、前記キャリッジに設けられた前記光源で前記液状体に前記光を照射する、
ことを特徴とする請求項1乃至3のいずれか一項に記載の描画方法。
【請求項5】
前記塗布工程では、少なくとも前記キャリッジを移動させることによって前記相対位置を変化させながら、前記吐出ヘッドから前記液状体を吐出し、
前記照射工程では、前記キャリッジの移動方向に前記吐出ヘッドを挟んだそれぞれの箇所に設けられた前記光源で前記液状体に前記光を照射する、
ことを特徴とする請求項4に記載の描画方法。
【請求項6】
紫外光の照射を受けることによって硬化する液状体をワークに向けて吐出する吐出ヘッドと、
前記ワークに塗布された前記液状体に照射する前記紫外光を含む光を発する光源と、
前記ワークの熱特性に応じて前記光源と前記ワークとの間の距離を制御する制御部と、を有する、
ことを特徴とする描画装置。
【請求項7】
前記吐出ヘッドを支持するキャリッジと、
前記吐出ヘッドと前記ワークとを互いに対面させた状態で前記キャリッジに対する前記ワークの相対位置を変位させる変位装置と、を有し、
前記光源は、前記キャリッジに設けられており、且つ、前記相対位置の変位方向において、前記吐出ヘッドに並んでいる、
ことを特徴とする請求項6に記載の描画装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−78738(P2013−78738A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−220725(P2011−220725)
【出願日】平成23年10月5日(2011.10.5)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月5日(2011.10.5)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]