
描画装置の検査装置、描画装置、プログラム、描画装置の検査方法、及びプリント配線板の製造方法
【課題】より簡単に描画装置の能力を検査し、必要があれば補正する。
【解決手段】描画装置の検査装置が、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データが記憶されている記憶装置と、描画データに基づいて描画装置に第1マークを描画させる第1描画部(露光制御部201d等)と、描画された第1マークの位置を検出する第1検出部(描画位置検出部201i)と、描画データと第1マークの検出位置とに基づいて描画データを補正する補正部(データ補正部201e)と、補正された描画データに基づいて、描画装置に第2マークを描画させる第2描画部(露光制御部201d等)と、描画された第2マークの位置を検出する第2検出部(描画位置検出部201i)と、第1マークの検出位置と第2マークの検出位置とに基づいて両者の位置ずれ態様を求めるずれ取得部(データ処理部201k)と、を有する。
【解決手段】描画装置の検査装置が、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データが記憶されている記憶装置と、描画データに基づいて描画装置に第1マークを描画させる第1描画部(露光制御部201d等)と、描画された第1マークの位置を検出する第1検出部(描画位置検出部201i)と、描画データと第1マークの検出位置とに基づいて描画データを補正する補正部(データ補正部201e)と、補正された描画データに基づいて、描画装置に第2マークを描画させる第2描画部(露光制御部201d等)と、描画された第2マークの位置を検出する第2検出部(描画位置検出部201i)と、第1マークの検出位置と第2マークの検出位置とに基づいて両者の位置ずれ態様を求めるずれ取得部(データ処理部201k)と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、描画装置の検査装置、描画装置、プログラム、描画装置の検査方法、及びプリント配線板の製造方法に関する。
【背景技術】
【0002】
特許文献1には、描画装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4244156号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、プリント配線板の製造などにおける描画では、高い精度の位置合わせが要求されることがある。しかしながら、特許文献1に記載される描画装置では、合わせ精度の安定性が十分ではなく、また、手作業で合わせ精度の検査をするため、合わせ精度を確認するために手間や時間がかかるという課題がある。
【0005】
本発明は、こうした実情に鑑みてなされたものであり、より簡単に描画装置の能力を検査し、必要があれば補正することを目的とする。また、本発明は、プリント配線板の製造において、高い位置精度でソルダーレジストに開口部を形成することを他の目的とする。
【課題を解決するための手段】
【0006】
本発明に係る描画装置の検査装置は、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データが記憶されている記憶装置と、前記描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部と、前記描画された第1マークの位置を検出する第1検出部と、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部と、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部と、前記描画された第2マークの位置を検出する第2検出部と、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部と、を有する。
【0007】
本発明に係る描画装置は、前記描画装置の検査装置を有する。
【0008】
本発明に係るプログラムは、コンピュータを、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部、前記描画された第1マークの位置を検出する第1検出部、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部、前記描画された第2マークの位置を検出する第2検出部、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部、として機能させる。
【0009】
本発明に係る描画装置の検査方法は、コンピュータが、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させることと、コンピュータが、前記描画された第1マークの位置を検出することと、コンピュータが、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正することと、コンピュータが、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させることと、コンピュータが、前記描画された第2マークの位置を検出することと、コンピュータが、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めることと、を含む。
【0010】
本発明に係るプリント配線板の製造方法は、前記描画装置によりプリント配線板のソルダーレジストに開口部を形成することを含む。
【発明の効果】
【0011】
本発明によれば、より簡単に描画装置の能力を検査し、必要があれば補正することができる。あるいは、本発明によれば、プリント配線板の製造において、高い位置精度でソルダーレジストに開口部を形成することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る描画装置の概要を示す図である。
【図2】本発明の実施形態に係る露光機の概要を示す図である。
【図3】本発明の実施形態に係る露光機の動作を説明するための図である。
【図4】本発明の実施形態に係る制御ユニットの構成を示す図である。
【図5】本発明の実施形態に係る制御ユニットに含まれるコンピュータの機能ブロック図である。
【図6】本発明の実施形態に係る描画装置の検査方法を示す第1のフローチャートである。
【図7A】本発明の実施形態に係る描画データの第1描画パターンを示す図である。
【図7B】本発明の実施形態において、第1描画パターンの別例を示す図である。
【図8A】本発明の実施形態に係る描画データの第2描画パターンを示す図である。
【図8B】本発明の実施形態において、第2描画パターンの別例を示す図である。
【図9】本発明の実施形態に係る第1検査用マークと第2検査用マークとの関係を示す図である。
【図10】本発明の実施形態に係る描画態様を説明するための図である。
【図11】本発明の実施形態に係る描画装置の検査において、描画された第1描画パターンを示す図である。
【図12】本発明の実施形態に係る描画データの補正において、補正前の描画データを示す図である。
【図13A】本発明の実施形態に係る描画データの補正において、描画データの座標系の補正態様を示す図である。
【図13B】本発明の実施形態に係る描画データの補正において、補正後の描画データを示す図である。
【図14】本発明の実施形態に係る描画データの補正において、補正後の描画態様を示す図である。
【図15】本発明の実施形態に係る描画装置の検査において、第1検査用マーク及び第2検査用マークが描画された基板を示す図である。
【図16】本発明の実施形態に係る描画装置の検査方法を示す第2のフローチャートである。
【図17】本発明の実施形態に係る位置ずれ態様を示す図である。
【図18A】本発明の実施形態に係るプリント配線板の製造方法の第1の工程を説明するための図である。
【図18B】図18Aに示すプリント配線板の平面図である。
【図19A】図18Aの工程の後の第2の工程を説明するための図である。
【図19B】図19Aに示すプリント配線板の平面図である。
【図20】図19Aの工程の後の第3の工程を説明するための図である。
【図21A】図20の工程の後の第4の工程を説明するための図である。
【図21B】図21Aに示すプリント配線板の平面図である。
【図22】本発明の他の実施形態において、所定の場合に限り描画データを補正するようにした描画装置の検査方法を示すフローチャートである。
【図23】本発明の他の実施形態において、補正後の描画データに基づく描画の位置ずれが大きい場合に再度描画データを補正するようにした描画装置の検査方法を示すフローチャートである。
【図24】本発明の他の実施形態において、位置ずれの程度に応じて異なる処理を行うようにした描画装置の検査方法を示すフローチャートである。
【図25A】本発明の実施形態に係る描画データにおいて、第2検査用マークが他の形状を有する第1の別例を示す図である。
【図25B】本発明の実施形態に係る描画データにおいて、第2検査用マークが他の形状を有する第2の別例を示す図である。
【図26】本発明の実施形態に係る描画データにおいて、第2検査用マークが他の形状を有する第3の別例を示す図である。
【図27】本発明の実施形態に係るプリント配線板の製造方法において、プリント配線板の最外層のパッドが他の形状を有する別例を示す図である。
【図28】本発明の実施形態に係る描画データにおいて、第1検査用マークが他の形状を有する第1の別例を示す図である。
【図29】本発明の実施形態に係る描画データにおいて、第1検査用マークが他の形状を有する第2の別例を示す図である。
【図30】本発明の他の実施形態において、複数の第1検査用マークが第2検査用マークに囲まれる描画データを示す図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施形態について、図面を参照しつつ詳細に説明する。なお、図中、矢印X1、X2、Y1、Y2、Z1、Z2は、互いに直交する3軸(XYZ軸)に係る6方向を示している。以下、「上」とは、Z1側を意味し、「下」とは、Z2側を意味する。
【0014】
「光」は、可視光に限られない。光には、可視光のほか、紫外線やX線等の短い波長の電磁波や、赤外線等の長い波長の電磁波も含まれる。
【0015】
「開口部」には、孔や溝のほか、切欠や切れ目等も含まれる。
【0016】
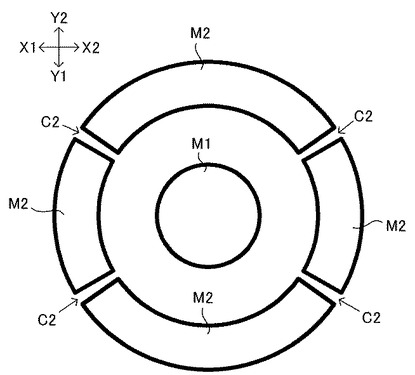
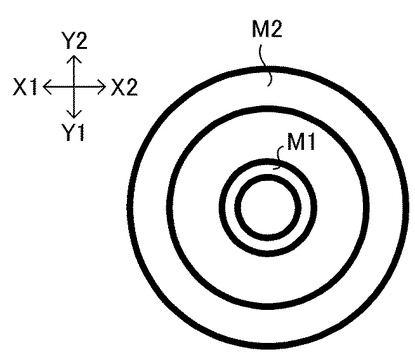
「囲む」には、切れ目のないリングで1つの領域を完全に閉じていること(図9参照)のほか、一部切れ目のあるリングで1つの領域を囲んでいること(図25A参照)や、破線状のリングで1つの領域を囲んでいること(図25B参照)なども、含まれる。リングとは、線の両端をつないで出来る平面図形をいい、円(図9参照)だけでなく、多角形(図26参照)なども、リングに含まれる。
【0017】
「位置ずれ態様」には、位置ずれの量(距離)だけでなく、位置ずれの方向等も含まれる。
【0018】
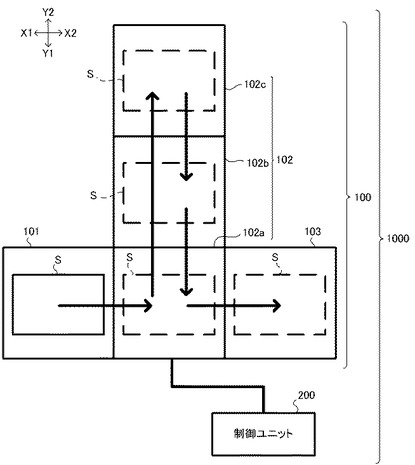
本実施形態の描画装置1000(詳しくは、検査装置を有する描画装置)は、図1に示すように、処理ユニット100と、制御ユニット200と、を有する。制御ユニット200は、有線又は無線で処理ユニット100と通信可能に接続され、処理ユニット100の各センサから信号(検出値等)を取得するとともに、処理ユニット100の各アクチュエータに指示を与える。
【0019】
処理ユニット100は、投入部101と、露光機102と、払出部103と、を有する。露光機102は、搬送部102aと、アライメント部102bと、露光部102cと、を有する。
【0020】
投入部101は、搬送部102aを介して、払出部103と接続され、搬送部102aは、アライメント部102bを介して、露光部102cと接続されている。これらは相互に基板Sを搬送することができるように接続されている。投入部101にセットされた基板Sは、搬送部102aに投入され、搬送部102aから、アライメント部102bを経て、露光部102cに搬送される。そして、基板Sは、露光部102cで露光された後、アライメント部102bで露光位置(例えばXY座標)を計測されて、搬送部102aを経て、払出部103へと払い出される。本実施形態では、制御ユニット200により、基板Sの搬送(自動搬送)が制御される。
【0021】
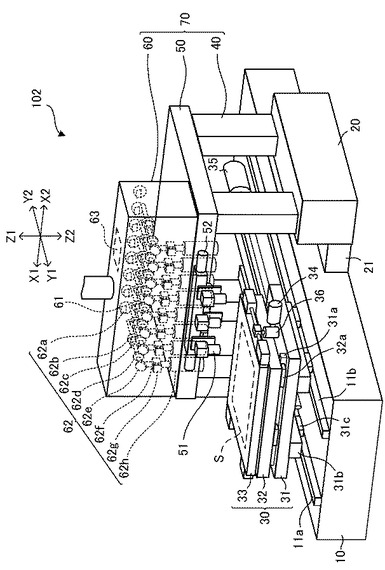
図2に、露光機102の概要を示す。本実施形態の露光機102は、例えば所定の描画データに基づいて制御される光(詳しくは、光源から発せられる所定の波長を有する電磁波)により、基板Sに対して所定のパターンを直接描画(露光)するダイレクト方式の露光機(以下、ダイレクトイメージ露光機という)である。露光機102によれば、基板S上に所定の描画データに対応したパターンを露光することができる。本実施形態では、描画データのパターン(以下、描画パターンという)として矩形パターンを用いる(後述の図7A及び図8A参照)。以下、描画パターンのX方向のデータをXラインといい、描画パターンのY方向のデータをYラインという。ただし、描画パターンは矩形パターンに限られず任意である。
【0022】
露光機102は、基台10及び20と、ステージ30と、U字状のゲート70と、を有する。
【0023】
本実施形態では、基台10が、Y方向を長手方向とする直方体の板からなる。そして、基台10上には、Y方向に伸びる2本のレール11a及び11bが敷かれている。
【0024】
基台20は、連結材21を介して、基台10と連結されている。基台20は、例えば直方体のブロックからなり、基台10の両脇(X1側及びX2側)に配置される。
【0025】
ステージ30は、基台10上に配置され、Z2側(基台10側)から、平板状のテーブル31、32、33を、この順で有する。
【0026】
テーブル31上には、X方向に伸びる2本のレール31aが設けられている。また、テーブル31下には、レール11a及び11bと同じ方向(すなわち、Y方向)に伸びる2本の棒材31bが設けられており、各棒材31bには、レール11a及び11bに係合可能なガイド31cが取り付けられている。ガイド31cは、例えば1本のレールにつき2つ設けられる。2本の棒材31bの間隔は、レール11a及び11bの間隔に対応しており、ガイド31cがレール11a及び11bに係合することで、テーブル31(ひいてはステージ30)が、基台10上をレール11a及び11bに沿って(すなわち、Y方向に)移動することが可能になる。ステージ30がY方向に移動するための動力は、例えばモータ35により付与される。本実施形態では、モータ35が、ACサーボモータからなる。また、ステージ30のY方向の位置(以下、Y座標という)は、例えばリニアエンコーダにより検出される。このリニアエンコーダは、後述のY位置検出部35a(図4、図5)に相当する。リニアエンコーダの分解能は、約0.2μmであることが好ましい。
【0027】
また、テーブル32下には、レール31aに係合可能なガイド32aが取り付けられている。ガイド32aは、例えば1本のレールにつき2つ設けられる。ガイド32aがレール31aに係合することで、テーブル32が(さらにはテーブル33も)、テーブル31上をレール31aに沿って(すなわち、X方向に)移動することが可能になる。テーブル32及び33がX方向に移動するための動力は、例えばモータ34により付与される。本実施形態では、モータ34が、ACサーボモータからなる。また、ステージ30のX方向の位置(以下、X座標という)は、例えばリニアエンコーダにより検出される。このリニアエンコーダは、後述のX位置検出部34a(図4、図5)に相当する。リニアエンコーダの分解能は、約0.2μmであることが好ましい。
【0028】
また、テーブル32とテーブル33とは、Z方向に相対移動可能に連結されている。テーブル33は、図示しないZ方向のガイドに沿って、テーブル32に対して上下することができる。テーブル33がZ方向に移動するための動力は、例えばモータ36により付与される。本実施形態では、モータ36が、ACサーボモータからなる。また、テーブル33のZ方向の位置(以下、Z座標という)は、例えばロータリーエンコーダにより検出される。このロータリーエンコーダは、後述のZ位置検出部36a(図4、図5)に相当する。ロータリーエンコーダの分解能は約0.0013μmであることが好ましく、ロータリーエンコーダの指令単位は約0.1μmであることが好ましい。
【0029】
ゲート70は、基台10を跨ぐように設けられている。ステージ30は、Y方向に移動することで、ゲート70をくぐることができる。ゲート70は、脚部40と、天板50と、露光ユニット60と、を有する。
【0030】
脚部40は、基台20上に立設される。基台20が基台10に固定され、脚部40が基台20に固定されることで、ゲート70が基台10に固定されることになる。
【0031】
天板50の前面(Y1側)には、複数(例えば3つ)のカメラ51が取り付けられている。カメラ51の各々は、天板50に対して相対的に移動可能な態様で取り付けられる。詳しくは、これらカメラ51は、例えばX方向に並ぶように配置され、カメラ51の各々は、ステージ30の移動方向(Y方向)に対して直交する方向(すなわち、X方向)に沿って移動可能になっている。
【0032】
テーブル33をカメラ51の下方(アライメント部102b(図1)に相当する位置)に移動させることで、カメラ51により、テーブル33上の基板Sの表面の形態(特に、露光位置)を光学的に認識することができる。テーブル33をY方向に、また、カメラ51をX方向に、それぞれ移動させることで、基板S上の任意の位置(ひいては基板S全面)の形態を認識することが可能になる。本実施形態では、カメラ51が、(露光ヘッド)の近傍に配置される。これにより、カメラ51で露光位置を正確に捉え易くなる。
【0033】
カメラ51は、例えば撮像素子としてのCCD(Charge Coupled Device)からなる。ただしこれに限定されず、カメラ51の数、種類、及び配置は、任意である。例えばカメラ51は、撮像素子としてのCMOS(Complementary Metal Oxide Semiconductor)からなってもよい。
【0034】
カメラ51がX方向に移動するための動力は、例えばモータ52により付与される。本実施形態では、モータ52が、ACサーボモータからなる。また、カメラ51のX座標は、例えばロータリーエンコーダにより検出される。このロータリーエンコーダは、後述のカメラ位置検出部52a(図4、図5)に相当する。ロータリーエンコーダの分解能は約0.0013μmであることが好ましく、ロータリーエンコーダの指令単位は約0.1μmであることが好ましい。
【0035】
露光ユニット60は、光源ユニット61と、露光光学系62と、温度調整ユニット63と、を内蔵している。本実施形態では、露光ユニット60が、投影露光方式で描画(露光)を行う。また、描画を行うための光の射出口(露光ヘッド)の位置は固定されている。なお、露光ユニット60の露光方式は投影露光方式に限られず任意である。
【0036】
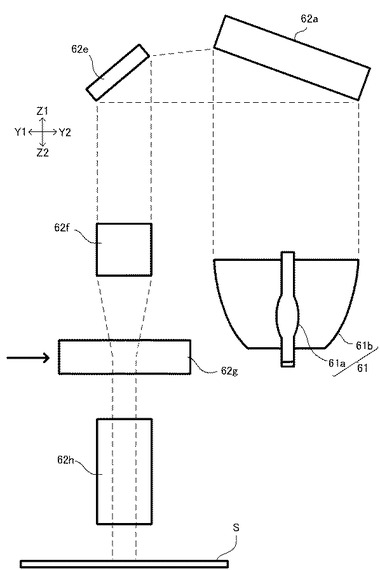
光源ユニット61は、図3に示すように、高圧水銀灯61a(光源)と、楕円面鏡61bと、を有する。ただしこれに限定されず、光源ユニット61の構成は任意であり、例えば高圧水銀灯61aに代えて、半導体レーザ等を用いてもよい。光源の波長は、例えば紫外(UV)領域である。
【0037】
露光光学系62は、図2に示すように、平面ミラー62aと、コリメータレンズ62bと、フライアイレンズ62cと、リレーレンズ62dと、平面ミラー62eと、コンデンサレンズ62fと、DMD(Digital Micro-mirror Device:登録商標)素子62gと、結像レンズ62hと、を有する。
【0038】
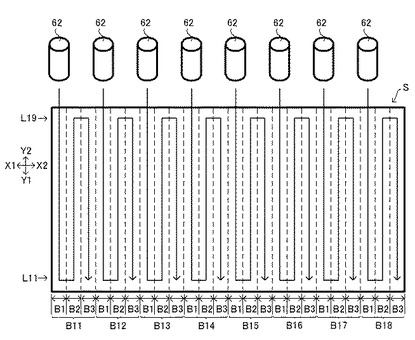
本実施形態では、8組の露光光学系62がX方向に配列され、それぞれの露光ヘッド(結像レンズ62h)から、基板Sに光が照射される。ここで、DMD素子62gは、マイクロミラー群を有する反射型の空間光変調素子であり、マイクロミラー単位でオン/オフ制御される。各露光光学系62の露光/非露光は、DMD素子62gのマイクロミラーの状態(オン/オフ)に応じて変わる。このため、X方向に配列された各露光光学系62のDMD素子62gのマイクロミラーの状態(例えば角度)を描画パターンに応じて制御することにより、各マイクロミラーの状態に対応したドットパターンとして描画パターンの任意のXラインを描画(露光)することができる。また、各露光光学系62の露光(Xラインの描画)と同期してステージ30を移動させることにより、描画パターン全体を基板Sに描画することができる(詳しくは、後述の図10参照)。なお、露光光学系62の数は任意である。また、空間光変調素子はDMD素子62gに限定されず任意であり、例えばDMD素子62gに代えて、LCD(Liquid Crystal Display)又はAOM(Acoustic Optical Modulator)を用いてもよい。
【0039】
以下、主に図3を参照して、露光機102の、特に露光光学系62の動作について説明する。なお、図3では、便宜上、コリメータレンズ62b等が省略されている。
【0040】
図3に示すように、露光光学系62では、高圧水銀灯61aから発せられた光が平面ミラー62a(コールドミラー)で折り返されることによって、必要な波長の切り出しがなされる。そして、平面ミラー62aで折り返された光は、集光光学素子としてのコリメータレンズ62b(図2)により集光され、インテグレータとしてのフライアイレンズ62c(図2)により均一化される。そして、均一化された光(面状の光)は、リレーレンズ62d(図2)を通過した後、平面ミラー62eにより反射され、コンデンサレンズ62fを通過して、DMD素子62gに入射する。
【0041】
ここで、DMD素子62gは、制御ユニット200(図1)により制御される。詳しくは、制御ユニット200からDMD素子62gに与えられた指示(露光/非露光)が非露光であれば、光はDMD素子62gのマイクロミラーで反射されて基板Sに光は照射されず、指示が露光であれば、光は、DMD素子62gを通過し、結像レンズ62hを介して、基板Sに照射される。
【0042】
温度調整ユニット63は、例えば図示しない温度センサ(温度検出手段)及びヒータ(加熱手段)を有する。本実施形態では、温度調整ユニット63が、制御ユニット200(図1)により制御される。詳しくは、温度センサにより、露光ユニット60内(高圧水銀灯61a及び露光光学系62等)の温度を検出するとともに、その検出値に基づいてヒータを制御することにより露光ユニット60内の温度を所定の温度範囲内に調整することができる。なお、温度調整ユニット63は、加熱手段に代えて又は加えて、冷却手段を有していてもよい。
【0043】
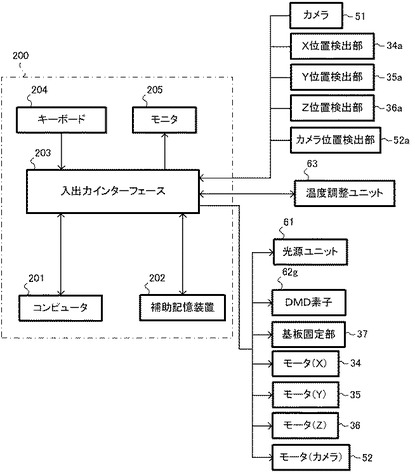
制御ユニット200は、図4に示すように、コンピュータ201と、補助記憶装置202と、入出力インターフェース203と、キーボード204(入力装置)と、モニタ205(出力装置)と、を有する。
【0044】
コンピュータ201は、CPU及びRAM(主記憶装置)を有し、入出力インターフェース203を介して、補助記憶装置202、キーボード204、及びモニタ205の各々と通信可能に接続される。ユーザはキーボード204を操作することにより、データや指示等をコンピュータ201に入力することができる。また、コンピュータ201の演算結果等は、モニタ205に出力(表示)することができる。なお、制御ユニット200は、キーボード204に代えて又は加えて、マウス等の入力装置を有していてもよい。
【0045】
補助記憶装置202としては、ROM、ハードディスク、又はEEPROM(Electrically Erasable and Programmable Read Only Memory)等を用いることができる。補助記憶装置202の数は任意であり、例えば異なる種類の複数の補助記憶装置202を用いることもできる。補助記憶装置202には、各種プログラム、露光条件、及び描画データ等が格納される。
【0046】
処理ユニット100の各センサからの信号(検出値等)は入出力インターフェース203に入力され、処理ユニット100の各アクチュエータへの信号(指示等)は入出力インターフェース203から出力される。
【0047】
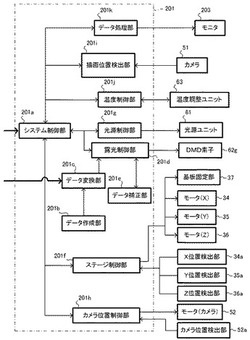
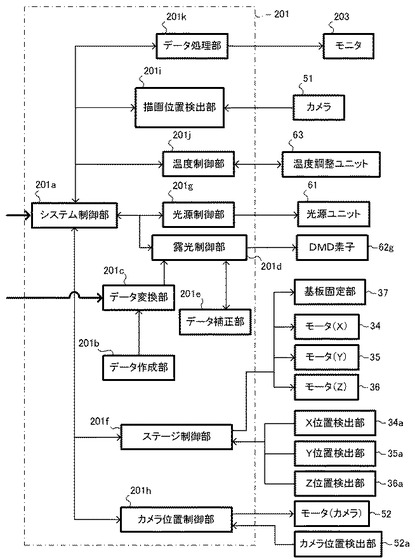
図5は、コンピュータ201の機能ブロック図である。コンピュータ201は、図5に示されるように、システム制御部201aと、データ作成部201bと、データ変換部201cと、露光制御部201dと、データ補正部201eと、ステージ制御部201fと、光源制御部201gと、カメラ位置制御部201h(撮像位置制御部)と、描画位置検出部201iと、温度制御部201jと、データ処理部201kと、を有する。これらはそれぞれ、回路等のハードウェア、ROM等に記憶されているソフトウェア(プログラム)、又はハードウェアとソフトウェアとの組み合わせから構成される。
【0048】
本実施形態では、データ作成部201bによりCAD(Computer Aided Design)システムが構築され、コンピュータ201を構成する上記各部(図5)により、CAM(Computer Aided Manufacturing)システム(以下、描画システムという)が構築される。この描画システムにおいては、システム制御部201aが総括して、システム全体を制御する。本実施形態では、システム制御部201aが、描画システムを構築する他の部分と直接的に又は間接的に通信可能に接続されている(図5参照)。これにより、システム制御部201aを介して、描画システム内でのデータの授受や指示の伝達等が可能になる。
【0049】
ユーザは、データ作成部201bにより描画データを作成することができる。データ作成部201bで作成された描画データはデータ変換部201cに向けて出力される。また、別途作成した描画データをデータ変換部201cに入力することもできる。データ変換部201cは、描画データのデータ形式を所定のデータ形式(例えばラスタデータ)に変換する。本実施形態では、描画データが、ベクトルデータとして作成され、データ変換部201cでラスタデータ(ビットマップデータ)に変換される。
【0050】
露光制御部201dは、データ変換部201cにより所定のデータ形式になった描画データに基づいて、DMD素子62g(例えばマイクロミラーのオン/オフ)を制御する。また、データ補正部201eは、補助記憶装置202(図4)に記憶されている所定の描画データと、その描画データに基づいて基板S上に描画された検査用マークの検出位置(以下、描画位置という)とに基づいて、描画データを補正する。露光制御部201dは、データ補正部201eで補正された描画データ(以下、補正後の描画データという)に基づいて、DMD素子62gを制御することもできる。なお、検査用マークの描画位置は、カメラ51により検出することができる。
【0051】
検査用マークの描画(露光)に際して、システム制御部201aは、ステージ制御部201fを通じて、基板固定部37を制御してステージ30上に基板Sを固定し、X位置検出部34a、Y位置検出部35a、及びZ位置検出部36aによりステージ30の位置を確認しながら、ステージ30の位置(詳しくは、モータ34〜36)を制御し、光源制御部201gを通じて、光源ユニット61(詳しくは、光の強度等)を制御する。ステージ制御部201fは、描画中もステージ30を移動させる(後述の図10参照)。
【0052】
描画位置の検出に際して、システム制御部201aは、カメラ位置制御部201hを通じて、カメラ位置検出部52aによりカメラ51の位置を確認しながらカメラ51の位置(詳しくは、モータ52)を制御し、描画位置検出部201iを通じて、カメラ51による検出結果に基づいて検査用マークの描画位置を取得する。
【0053】
また、温度制御部201jは、少なくとも描画中及び検出中において、温度調整ユニット63を制御して、露光ユニット60内の温度を所定の温度範囲内になるように管理する。
【0054】
データ処理部201kは、カメラ51により検出された2つのデータのずれ態様を算出し、その算出結果(ずれ態様)をモニタ205に出力(表示)する。
【0055】
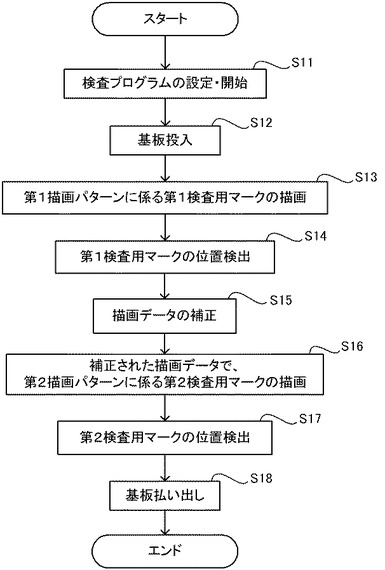
こうした描画装置1000を用いて、例えば図6及び図16に示すような描画装置の検査を行うことができる。本実施形態では、図6の処理で、描画(露光)に基づき描画装置1000(特に、露光機102)に係るデータを取得し、図16の処理で、図6の処理により取得したデータを解析する。
【0056】
なお、コンピュータ201による処理は、例えば所定のプログラムをCPUが実行することで、開始され又は進行する。また、取得したデータ(検出又は算出等)は、例えば補助記憶装置202(図4)に格納される。ただしこれに限られず、データの保存方法は任意である。長期にわたって使用するデータについては、不揮発性の記憶装置に格納することが望ましい。本実施形態では、温度制御部201jが温度調整ユニット63を制御して、常に露光ユニット60内の温度が所定の温度範囲(例えば22℃±1.5℃)内になるように管理している。
【0057】
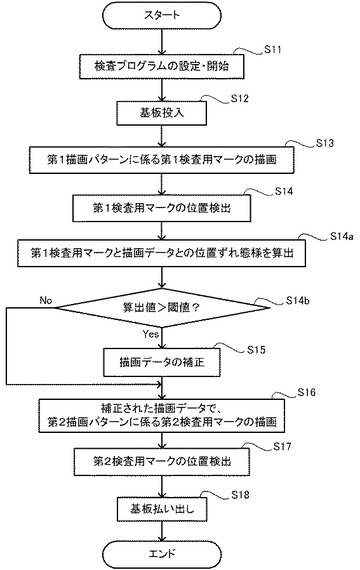
図6のステップS11で、例えばユーザがキーボード204を操作することにより、コンピュータ201に、検査に用いるパラメータ(基板Sの寸法及び露光条件等)の設定を行う。また、描画データ(例えば、変換後のラスタデータ)は、補助記憶装置202(図4)に格納しておく。
【0058】
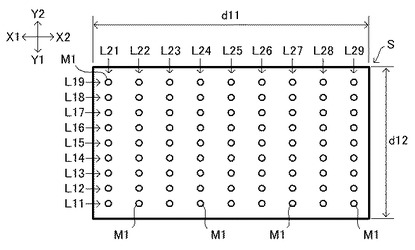
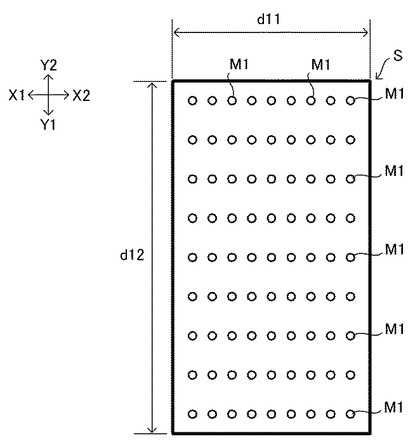
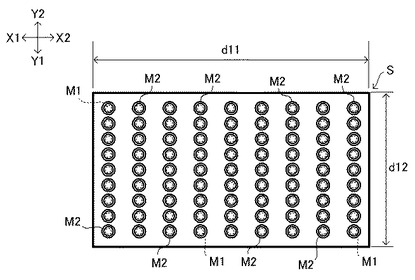
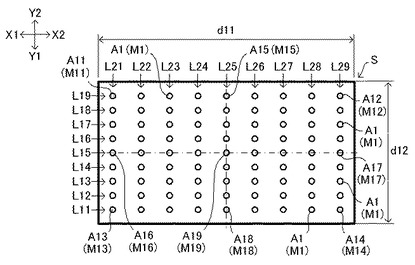
図7A〜図8Bに、本実施形態の検査に係る基板Sの寸法及び描画パターン(第1描画パターン及び第2描画パターン)を示す。各図中、幅d11は、基板Sの横(X方向)の幅を示し、幅d12は、基板Sの縦(Y方向)の幅を示している。
【0059】
本実施形態では、図7A及び図8Aに示すように、基板Sとして、横(X方向)に長い矩形基板を用いる。具体的には、幅d11が例えば510mmであり、幅d12が例えば340mmである。しかしこれに限られず、例えば図7B及び図8Bに示すように、基板Sとして、縦(Y方向)に長い矩形基板(例えば縦510m×横340mm)を用いてもよい。あるいは、基板Sは正方形の基板であってもよい。描画装置1000の状態等に応じて、適切な基板S(検査用の基板)を選択することが好ましい。
【0060】
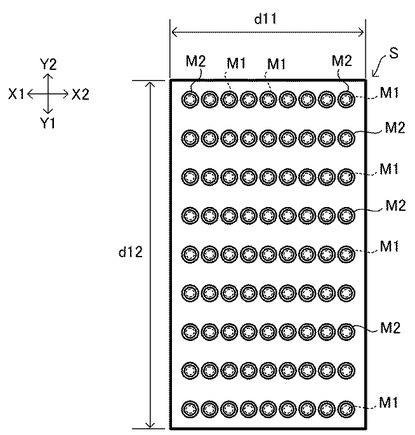
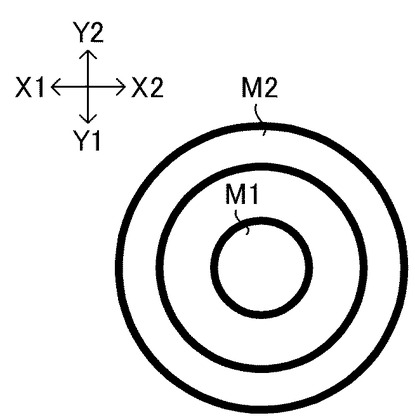
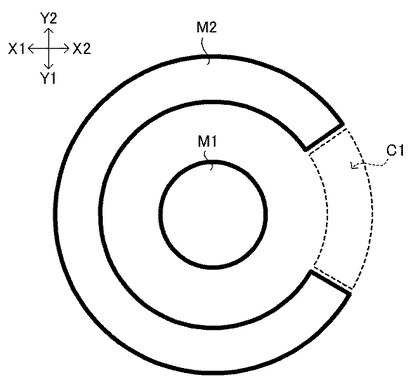
本実施形態で用いる描画パターンは、図7Aに示される第1描画パターン、及び図8Aに示される第2描画パターンである。図7A及び図8Aに示されるように、第1描画パターン及び第2描画パターンはそれぞれ、格子状(マトリクス状)の矩形パターンである。第1描画パターンでは、例えば点状(詳しくは、円形状)の第1検査用マークM1が横(X方向)及び縦(Y方向)にそれぞれ9つずつ略一定の間隔で配置される。第2描画パターンでは、例えば円形リング状の第2検査用マークM2が横(X方向)及び縦(Y方向)にそれぞれ9つずつ略一定の間隔で配置される。すなわち、本実施形態に係る描画パターンは、9本のXラインL11〜L19と9本のYラインL21〜L29とを有する。また、図9に示すように、第2描画パターンに係る第2検査用マークM2はそれぞれ、第1描画パターンに係る第1検査用マークM1を囲むように配置される。本実施形態では、第1検査用マークM1の重心位置と第2検査用マークM2の重心位置とが一致する。そして、こうした関係を有する第1検査用マークM1及び第2検査用マークM2はそれぞれ、基板Sの略全面に配置される。
【0061】
なお、描画データのパターン(第1描画パターン及び第2描画パターン)は、図7A及び図8Aに示されるパターンに限られず任意である。例えば図7B及び図8Bに示すように、描画データのパターンは、縦(Y方向)に長い矩形パターンであってもよい。あるいは、描画データのパターンは正方形パターン又は円形パターンであってもよい。また、第1検査用マークM1及び第2検査用マークM2の形状も円に限られず任意である(図26参照)。描画装置1000の状態等に応じて、適切な描画データを選択することが好ましい。
【0062】
検査に必要な準備が全て完了したら、例えばキーボード204を通じてコンピュータ201に指令を送ることにより、検査用プログラムを実行する。ただしこれに限定されず、所定条件の成立に基づき、自動的に実行されるようにしてもよい。
【0063】
続けて、図6のステップS12で、基板Sを露光機102(詳しくは、搬送部102a)に投入する。具体的には、例えば作業者が投入部101(図1)に基板Sをセットし、整列後、制御ユニット200(詳しくは、コンピュータ201)が図示しない搬送ロボット等を制御することにより、投入部101にセットされた基板Sを搬送部102a(図1)に搬送する。
【0064】
なお、投入に先立ち、基板Sの表面には感光性を有する層(以下、感光層という)を形成しておく。具体的には、例えば投入に先立ち、基板S上に感光性ドライフィルムを貼り付ける。ただしこれに限られず、例えばフォトレジストを基板Sの表面に塗布してもよい。
【0065】
続けて、図6のステップS13で、描画データに基づいて、基板S(詳しくは、その感光層)に第1検査用マークM1(図7A)を描画(露光)する。以下、主に図2及び図5を参照して、本実施形態に係る描画方法(露光方法)について説明する。
【0066】
露光部102c(図1)で露光(描画)される基板Sは、搬送部102a(図1)に相当する位置でテーブル33上に載置され、基板固定部37(図4、図5)によりテーブル33上に固定される。詳しくは、基板固定部37は、ステージ制御部201fの指示に基づき作動して、テーブル33上に基板を固定する。基板固定部37は、例えばバキューム吸着装置からなる。
【0067】
続けて、ステージ制御部201fがモータ35を制御することにより、ステージ30が基台10上をレール11a及び11bに沿ってY2側に移動する。これにより、基板Sが、露光部102cに相当する位置(結像レンズ62hの下方)、詳しくは最初の露光位置まで搬送される。
【0068】
また、必要に応じて、ステージ制御部201fは、描画データに基づき、X位置検出部34a、Y位置検出部35a、及びZ位置検出部36aによりステージ30の位置を確認しながらモータ34〜36を制御して、ステージ制御部201fのX、Y、Z座標を調整する。
【0069】
続けて、基板Sに第1描画パターン(図7A参照)を描画する。具体的には、図10に示すように、基板Sの横幅(X方向の幅)は8つ(露光光学系62の数に対応)のバンドB11〜B18に区分され、それらバンドB11〜B18の各々が、対応する位置の露光光学系62に割り当てられる。また、バンドB11〜B18の各々は、さらに3つの領域(描画バンドB1〜B3)に区分され、バンドB11〜B18の各々における描画バンドB1〜B3を、各露光光学系62の描画ヘッドが順に描画していく。各露光光学系62による露光を行いながら、ステージ30をY方向又はX方向に移動させることにより、描画バンドB1、B2、B3をこの順で描画する。そして、露光光学系62の描画ヘッドが基板Sを縦方向(Y方向)に1.5往復することで、基板S全域がスキャンされる。その結果、第1描画パターン全体(詳しくは、その第1描画パターンを構成する全ての第1検査用マークM1)が基板Sに描画される。描画バンドB1〜B3の幅は、例えばそれぞれ22.5mmであり、バンドB11〜B18の幅は、例えばそれぞれ67.5mm(=22.5mm×3)であり、最大描画幅は、例えば540mm(=67.5mm×8)である。以下、描画データに係る第1検査用マークを第1検査用マークM1というのに対し、実際に描画された第1検査用マークを第1検査用マークA1という。
【0070】
露光光学系62による露光は、例えば光源制御部201gが光源ユニット61を、また、露光制御部201dがDMD素子62gを、それぞれ制御することにより行われる。露光制御部201dは、データ変換部201cにより所定のデータ形式(例えばラスタデータ)に変換された描画データ(図7A参照)に基づいて、DMD素子62gのマイクロミラーのオン/オフを制御する。こうすることで、露光光学系62により露光される各Xラインのドットパターンが、描画データの各Xラインに対応したものとなる。
【0071】
また、描画中のステージ30の移動は、ステージ制御部201fがモータ34、35を制御することにより行われる。ステージ制御部201fは、例えば間欠的に又は連続的にステージ30をY方向又はX方向に移動させる。
【0072】
上記露光により、描画データ(図7A参照)に対応したパターンを有する第1検査用マークA1(図11参照)が基板Sに描画される。ただし、露光機102の合わせ精度(狙いどおりの位置に正確に描画する能力の高さ)は露光機102の状態等の影響を受けるため、必ずしも描画データに係る第1検査用マークM1の位置と実際に描画された第1検査用マークA1の位置(描画位置)とは一致しない。そこで、続く図6のステップS14では、カメラ51により、第1検査用マークA1の描画位置を検出する。本実施形態の露光機102は3台のカメラ51を有するため、同一のY座標に位置するマークを3個同時に読み込むことができる。また、読み込み精度を向上させるためには、所定のタイミングで、カメラ51の原点位置の確認動作を行うことが好ましい。カメラ51による位置検出は、所定の部分についての露光が終わる度に行ってもよいが、作業効率を向上させる上では、パターン全ての露光後に行うことが好ましい。
【0073】
本実施形態では、図11に示すように、描画された81個(=9×9個)の第1検査用マークA1のうち、基板Sの四隅の第1検査用マークA11〜A14と、基板Sの各辺の中点近傍の第1検査用マークA15〜A18と、基板Sの重心の第1検査用マークA19とについての描画位置を検出する。なお、第1検査用マークA11〜A14、A15〜A18、A19に対応する描画データをそれぞれ、第1検査用マークM11〜M14、M15〜M18、M19という。
【0074】
第1検査用マークA1の描画位置を検出する際には、ステージ制御部201fがモータ34、35を制御することにより、ステージ30のY方向又はX方向の位置を制御し、また、カメラ位置制御部201hが、カメラ位置検出部52aによりカメラ51の位置を確認しながらモータ52を制御することにより、カメラ51のX方向の位置を制御する。これにより、ステージ30をアライメント部102b(図1)に移動させ、基板S上の任意の第1検査用マークA1をカメラ51の下方に配置することができる。そして、描画位置検出部201iが、カメラ51からの信号(撮像信号)に基づいて所定の信号処理(画像処理及び演算等)を行うことで、第1検査用マークA1の描画位置を取得することができる。
【0075】
続けて、図6のステップS15で、データ補正部201eが、補助記憶装置202(図4)に記憶されている描画データ(第1検査用マークM11〜M19)と、その描画データに基づいて基板S上に描画された第1検査用マークA11〜A19の位置(描画位置)とに基づいて、描画データを補正する。以下、図12〜図14を参照して、この補正について説明する。
【0076】
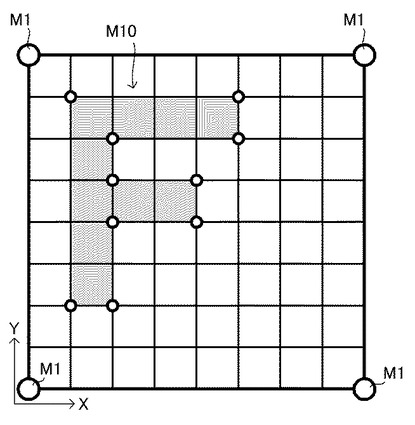
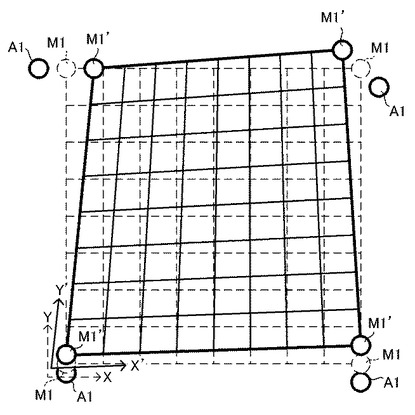
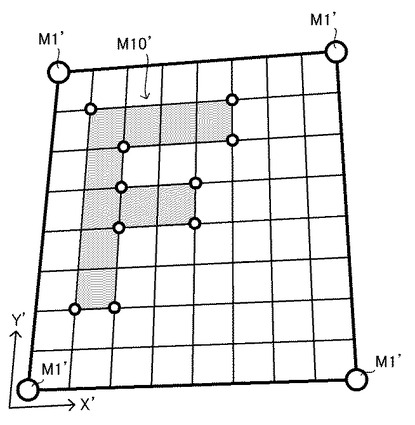
例えば図12に示すような描画データの第1検査用マークM1に基づいて描画を行い、実際には、図13Aに示すように第1検査用マークA1が基板S(図11参照)に描画された場合には、第1検査用マークM1と第1検査用マークA1との間に位置ずれが生じているため、そのずれに基づいて、描画データの座標系(XY座標軸)を補正する。詳しくは、図13Aに示すように、ずれた分だけ、第1検査用マークM1を反対側に補正するとともに、それに合わせて(データを補間して)描画データの座標系を歪ませる。アライメントマークを認識し、アライメントマークの伸縮に合わせて描画データも伸縮させることによって、描画データの座標と実際に描画される基板S上の座標とを一致させる。以下、補正後の第1検査用マークを第1検査用マークM1’といい、補正後の座標系におけるX軸、Y軸を、それぞれ軸X’、軸Y’という。補正前の描画データの座標は軸X、軸Yで規定され、補正後の描画データの座標は軸X’、軸Y’で規定される(図12に示すパターンM10及び図13Bに示すパターンM10’参照)。
【0077】
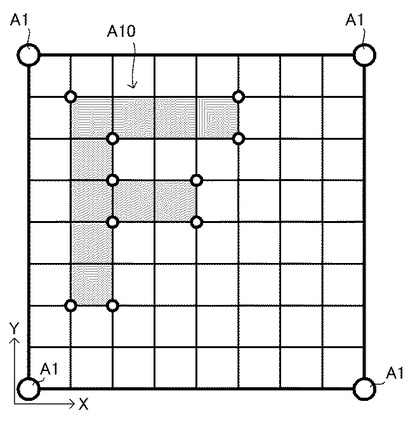
図13Bに、補正後の描画データを示す。例えば、この補正後の描画データの第1検査用マークM1’及びパターンM10’に基づいて描画を行えば、図14に示すように、第1検査用マークA1及びパターンA10が基板S(図12参照)に描画されると考えられる。
【0078】
こうした補正を、第1検査用マークM11〜M19(図11)の9点について行う。補正値は、補正前の描画データとは別に、補助記憶装置202(図4)に格納する。これにより、露光制御部201dは、補正後の描画データ(補正前の描画データに補正値を反映したデータ)に基づいて、DMD素子62gを制御するようになる。ただしこれに限られず、補正前の描画データを消去して、補正後の描画データに更新(上書き保存)してもよい。また、描画データが補正された場合に自動的に露光制御部201dが補正後の描画データを用いるようにしてもよいし、補正前の描画データと補正後の描画データのいずれを用いるかユーザが選択できるようにしてもよい。
【0079】
なお、補正の手法は、上記手法に限られず任意である。例えば9点のみではなく、全ての第1検査用マークM1について位置の検出及び描画データの補正を行ってもよい。また、有限要素法等を用いて、より複雑な補正を行ってもよい。
【0080】
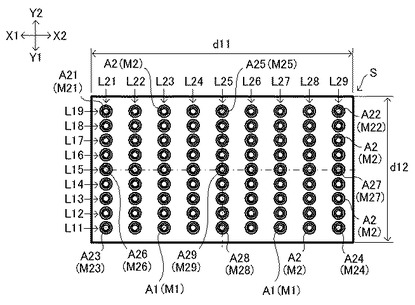
続けて、図6のステップS16で、補正された描画データに基づいて、ステップS13で描画された第1検査用マークA1の各々を囲むように、基板S(詳しくは、その感光層)に第2検査用マークM2(図8A)を描画(露光)する。なお、描画データに係る第2検査用マークを第2検査用マークM2というのに対し、実際に描画された第2検査用マークを第2検査用マークA2という。また、第1検査用マークA11〜A14、A15〜A18、A19に対応する第2検査用マークA2をそれぞれ、第2検査用マークA21〜A24、A25〜A28、A29という。
【0081】
図6のステップS16において、第1検査用マークA1を描画するとき(図6のステップS13)と同様の傾向で狙った位置(描画データ)からずれて第2検査用マークA2が描画されれば、第1検査用マークA1の各々を囲むように、第2検査用マークA2が描画されると考えられる。第2検査用マークA2を描画するときの制御態様(ステージ30、光源ユニット61、及び露光光学系62等の制御態様)は、第1検査用マークA1を描画するとき(図6のステップS13)と同様である。ただし、本実施形態では、上記のように、補正された描画データ(補正後の座標系)に基づいて、すでに描画された第1検査用マークA1の位置を狙って、第2検査用マークA2の各々が描画される。これにより、図15に示すように、基板Sに描画されている第1検査用マークA1の各々を囲むように、第2検査用マークA2が描画されると考えられる。
【0082】
続けて、図6のステップS17で、カメラ51により、第2検査用マークA2の描画位置を検出する。詳しくは、第1検査用マークA1の描画位置の検出(図6のステップS14)に対応して、基板Sの四隅の第2検査用マークA21〜A24と、基板Sの各辺の中点近傍の第2検査用マークA25〜A28と、基板Sの重心の第2検査用マークA29とについての描画位置を検出する。なお、第2検査用マークA21〜A24、A25〜A28、A29に対応する描画データをそれぞれ、第2検査用マークM21〜M24、M25〜M28、M29という。
【0083】
本実施形態では、描画位置検出部201iが、カメラ51からの信号(撮像信号)に基づいて所定の信号処理(画像処理及び演算等)を行うことで、第2検査用マークA2の描画位置を取得する。なお、第2検査用マークA2の描画位置を検出するときの制御態様(ステージ30、カメラ51等の制御態様)は、第1検査用マークA1の描画位置を検出するとき(図6のステップS14)と同様である。
【0084】
続けて、図6のステップS18で、露光機102から払出部103へ基板Sを払い出す(図1参照)。具体的には、ステージ制御部201fがモータ35を制御することにより、アライメント部102bから搬送部102aへ基板Sを搬送し、制御ユニット200(詳しくは、コンピュータ201)が図示しない搬送ロボット等を制御することにより、基板Sを払出部103へ払い出す。
【0085】
以上説明したように、図6の処理により、描画装置1000(特に、露光機102)に係るデータとして、第1検査用マークA11〜A19の描画位置及び第2検査用マークA21〜A29の描画位置を取得することができる。次に、図16の処理で、図6の処理により取得したデータを解析する。図16の処理は、例えば図6のステップS17で第2検査用マークA2の描画位置が検出されることにより自動的に開始される。
【0086】
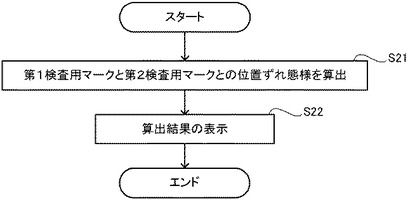
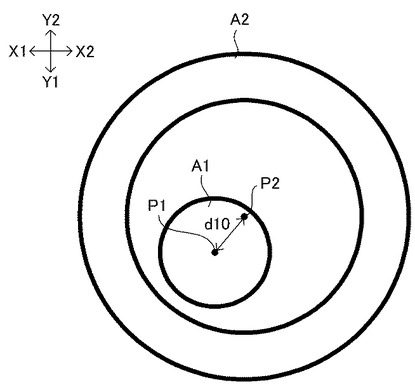
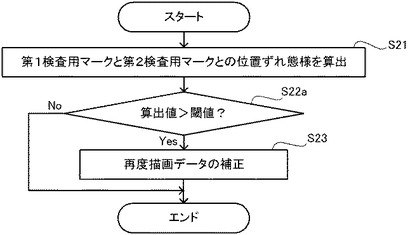
図16のステップS21では、データ処理部201kが、第1検査用マークA1(詳しくは、図11に示される第1検査用マークA11〜A19)の描画位置と第2検査用マークA2(詳しくは、図15に示される第2検査用マークA21〜A29)の描画位置との位置ずれ態様を求める。本実施形態では、位置ずれ態様として位置ずれ量を採用する。ただしこれに限られず、求める位置ずれ態様は任意であり、例えば方向(例えば角度)を含むベクトルを、位置ずれ態様として求めてもよい。
【0087】
本実施形態では、データ処理部201kが、図6のステップS14で検出された第1検査用マークA1の描画位置(例えばXY座標)と図6のステップS17で検出された第2検査用マークA2の描画位置(例えばXY座標)とに基づいて、図17に示されるような、第1検査用マークA1の重心P1と第2検査用マークA2の重心P2(詳しくは、リングが描く図形の重心)との位置ずれ量(距離d10)を算出する。
【0088】
距離d10は、機械合わせ精度に相当する。カメラ51の読み込み及び認識の誤差に相当するアライメント精度をCp1、機械の書き込み位置の誤差に相当する描画精度をCp2、データ変換誤差に相当するDAT補正精度をCp3、温度変化による機械の歪みに相当する機内温度変化をCp4とするとき、機械合わせ精度=√(Cp12+Cp22+Cp32+Cp42)と表すことができる。
【0089】
工程でのデータ分布と規格との数的関係を表す工程能力指数をCpという。Cpは、データの分布の中心(=平均値)が上限規格値と下限規格値の中央にあることが前提となっていて、ずれは考慮されない。そこで、平均値が上下規格の中心からずれている(偏りがある)場合に用いる指標が、Cpkである。Cpk(Cpu又はCpl)は、距離d10のデータ分布の平均と標準偏差σから以下の(式1)〜(式3)を使って求めることができる。
(式1)上限規格のみの場合:Cpu=(上限規格値−平均値)/3σ
(式2)下限規格のみの場合:Cpl=(下限規格値−平均値)/3σ
(式3)両側規格の場合:CpuとCplの小さい方の値
【0090】
続けて、図16のステップS22で、データ処理部201kが、上記位置ずれ態様(例えば距離d10)及びそれに基づき算出されたパラメータ(例えばCpk)を、モニタ205に表示させる。この際、データは、数値のまま表示してもよいし、グラフィック化して(グラフ、図表、平面図、又は立体図等として)表示してもよい。これにより、ユーザは、描画装置1000の描画精度(合わせ精度)などを確認することができる。なお、上記位置ずれ態様及びそれに基づき算出されたパラメータのいずれか一方のみをモニタ205に表示してもよい。
【0091】
本実施形態に係る描画装置の検査装置(制御ユニット200)は、第1マーク(第1検査用マークM1)と、第1マークを囲む第2マーク(第2検査用マークM2)と、を含む描画データが記憶されている記憶装置(補助記憶装置202)と、描画データに基づいて、露光機102に第1マークを描画させる第1描画部(露光制御部201d及び光源制御部201g等)と、描画された第1マーク(第1検査用マークA1)の位置を検出する第1検出部(描画位置検出部201i)と、描画データと検出された第1マークの位置とに基づいて、描画データを補正する補正部(データ補正部201e)と、補正された描画データに基づいて、描画された第1マークを囲むように、露光機102に第2マークを描画させる第2描画部(露光制御部201d及び光源制御部201g等)と、描画された第2マーク(第2検査用マークA2)の位置を検出する第2検出部(描画位置検出部201i)と、検出された第1マークの位置と検出された第2マークの位置とに基づいて、両者の位置ずれ態様(距離d10)を求めるずれ取得部(データ処理部201k)と、を有する(図1、図4、図5、図7A、図8A、図17参照)。このため、より簡単に露光機102の能力(特に、露光機102の状態等の影響を受ける合わせ精度)を検査し、補正することが可能になる。また、各処理(図6、図16参照)の自動化により短時間で検査を行うことが可能になる。
【0092】
特にダイレクトイメージ露光機においては、露光機102の合わせ精度が品質又は生産性に大きく影響するため、上記検査装置(制御ユニット200)は、ダイレクトイメージ露光機の検査に用いることが有効である。
【0093】
本実施形態に係る描画装置の検査装置(制御ユニット200)は、位置ずれ態様及びそれに基づき算出されたパラメータを表示装置(モニタ205)に表示させる表示指示部(データ処理部201k)を有する。これにより、ユーザが、モニタ205に表示されたデータを見て、容易に露光機102の合わせ精度を確認することが可能になる。
【0094】
図16の処理の後、ユーザが、モニタ205に表示されたデータを見て、十分な描画精度が得られていると判断した場合には、例えば図18A〜図20Bに示すように、その描画装置1000を用いて、プリント配線板のソルダーレジストに開口部を形成することができる。以下、図18A〜図21Bを参照して、このことについてさらに説明する。
【0095】
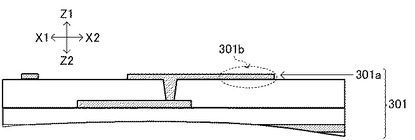
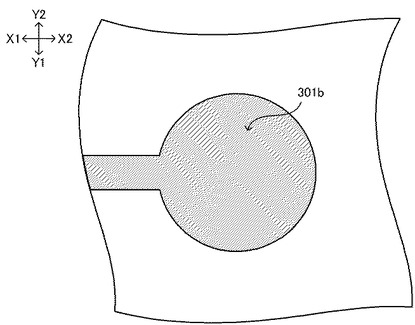
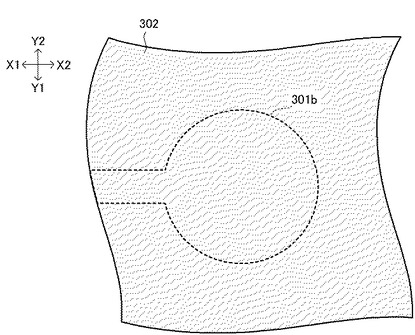
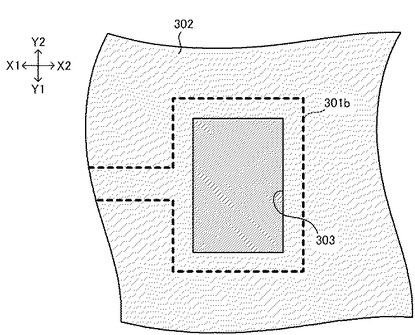
例えば図18A及び図18Bに示すように、ソルダーレジストを形成する前のプリント配線板301を用意する。プリント配線板301の最外層の導体層301aは、配線のほか、電子部品(例えば半導体素子)又は他の配線板(例えばマザーボード)等を実装するためのパッド301bを含む。図18Bに示されるように、パッド301bの形状(X−Y平面)は、例えば円形である。ただしこれに限られず、パッド301bの形状(X−Y平面)は任意である(後述の図27参照)。
【0096】
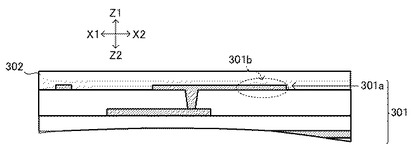
続けて、図19A及び図19Bに示すように、プリント配線板301上にソルダーレジスト302を形成する。ソルダーレジスト302は、描画装置1000の光源に対応した感光性材料(例えばネガレジスト)からなる。
【0097】
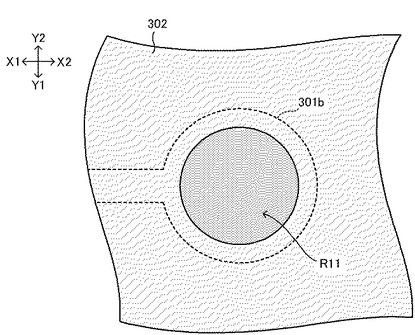
続けて、描画装置1000により、ソルダーレジスト302に開口部を形成すべく、図20に示すように、前述した第2検査用マークA2の描画(図6のステップS16)と同様の態様で、ソルダーレジスト302に、パッド301bの形状に対応した円状の描画を行う。ただしここでは、円状のパターン部R11を除く部分を露光して、現像液に対して不溶化する。その後、現像により円状のパターン部R11(未露光部分)を除去する。
【0098】
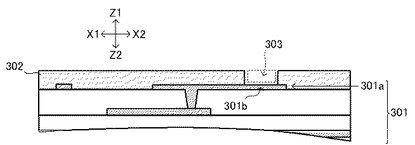
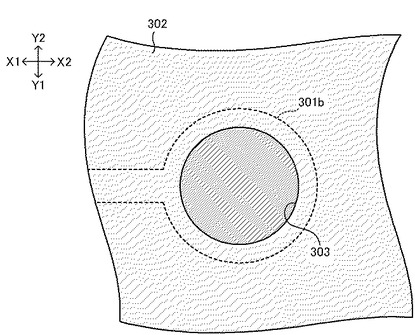
これにより、図21A及び図21Bに示すように、パッド301b上のソルダーレジスト302に、パッド301bの中央部を露出させるような円柱状の開口部303を形成することができる。
【0099】
プリント配線板では、最外層のパッド301bとソルダーレジスト302の開口部303との位置精度が重要になる。この点、本実施形態では、描画装置1000について予め前述の検査(図6及び図16参照)において、パッド301bを想定した点状の第1検査用マークM1に対して、開口部303を形成するための描画を想定した、第1検査用マークM1を囲むリング状の第2検査用マークM2の描画を行って、その描画の位置精度を確保しているため、描画装置1000を用いてプリント配線板を製造する場合において、最外層のパッド301bとソルダーレジスト302の開口部303との位置精度を高め易くなる。また、ソルダーレジスト302の開口部303を的確な位置に形成し易くなることで、プリント配線板のファイン化が容易になる。
【0100】
こうして製造されたプリント配線板は、携帯電話又は小型コンピュータ等の回路基板として使用することができる。
【0101】
他方、図16の処理の後、ユーザが、モニタ205に表示されたデータを見て、十分な描画精度が得られていないと判断した場合には、例えば露光機102の機械的な調整を行ったり、もう一度検査(図6、図16参照)を行ったりすることが好ましい。
【0102】
上記実施形態では、ソルダーレジスト302としてネガレジストを用いる場合について説明したが、ソルダーレジスト302としてポジレジストを用いてもよい。
【0103】
本発明は、上記実施形態に限定されない。例えば以下のように変形して実施することもできる。
【0104】
上記実施形態において、描画データの補正(図6のステップS15)を常に行うことは必須ではない。例えば図6の処理に代えて、図22の処理を行ってもよい。図22の例では、図6と同様の内容のステップS11〜S14の後、ステップS14aで、データ処理部201k(図5)が、描画データと第1検査用マークA1との位置ずれ態様(例えばCpk)を算出し、続くステップS14bで、データ処理部201k(図5)が、その算出値(例えばCpk)が所定の閾値よりも大きいか否かを判断する。そして、閾値よりも大きい算出値(位置ずれ)があると判断された場合には(ステップS14b:Yes)、描画データの補正(ステップS15)を行い、閾値よりも大きい算出値(位置ずれ)がないと判断された場合には(ステップS14b:No)、描画データの補正を行わずに、続くステップS16〜S18の処理(図6の処理と同様)を行う。
【0105】
上記実施形態では、図16のステップS21で算出した位置ずれ態様等をモニタ205(図4)に表示し、ユーザが、露光機102の合わせ精度を確認するようにしたが、これに限定されない。例えば図16の処理に代えて、図23又は図24の処理を行ってもよい。
【0106】
図23の例では、図16と同様の内容のステップS21で位置ずれ態様等を算出した後、データ処理部201k(図5)が、その算出値(例えば図17に示される距離d10)が所定の閾値よりも大きいか否かを判断する。そして、閾値よりも大きい算出値(位置ずれ)があると判断された場合には(ステップS22a:Yes)、続くステップS23で、再度、図6の処理及び図16の処理を自動的に実行する。
【0107】
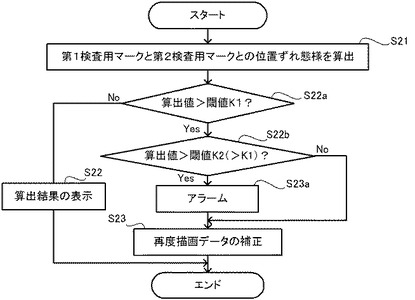
また、図24の例では、位置ずれの程度を複数の段階(例えば小、中、大)に分けて、位置ずれの程度に応じて、異なる処理を行う。具体的には、図16と同様の内容のステップS21で位置ずれ態様等を算出した後、データ処理部201k(図5)が、その算出値(例えば図17に示される距離d10)が所定の閾値K1よりも大きいか否かを判断する。そして、閾値K1よりも大きい算出値があると判断された場合には(ステップS22a:Yes)、続くステップS22bで、その算出値(例えば距離d10)が、閾値K1よりも大きい所定の閾値K2よりも大きいか否かを判断する。そして、閾値K2よりも大きい算出値がある(位置ずれの程度=大)と判断された場合には(ステップS22b:Yes)、続くステップS23aで、アラームを発する。アラームは任意であり、音(音声を含む)であっても、モニタ205への表示であっても、又はランプの点灯であってもよい。また、ステップS22bで、閾値K2よりも大きい算出値がない(位置ずれの程度=中)と判断された場合には(ステップS22b:No)、続くステップS23で、再度、図6の処理及び図16の処理を自動的に実行する。また、ステップS22aで、閾値K1よりも大きい算出値がない(位置ずれの程度=小)と判断された場合には(ステップS22a:No)、続くステップS22で、ステップS21で算出した位置ずれ態様等をモニタ205に表示する。
【0108】
第2検査用マーク(第2マーク)の形状は、図9に示されるような切れ目のないリング状に限られず、第1検査用マーク(第1マーク)を囲むものであれば任意である。第2検査用マークの形状は、例えば図25Aに示すように、例えば切れ目C1のある円形リングであってもよく、例えば図25Bに示すように、複数の切れ目C2のある破線状の円形リングであってもよい。
【0109】
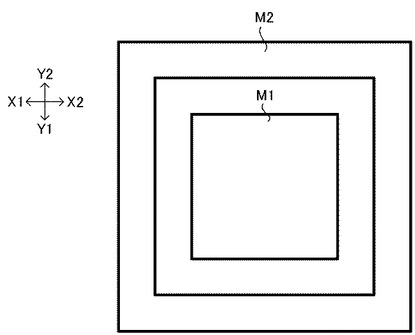
第1検査用マークM1及び第2検査用マークM2の形状(X−Y平面)はそれぞれ、円状に限られず、例えば図26に示すように、多角形状(例えば四角形状)であってもよい。図27に示すように、四角形状のパッド301b上のソルダーレジスト302に四角形状の開口部303を形成する場合には、四角形状の第1検査用マークM1及び第2検査用マークM2(図26)を用いることが好ましい。
【0110】
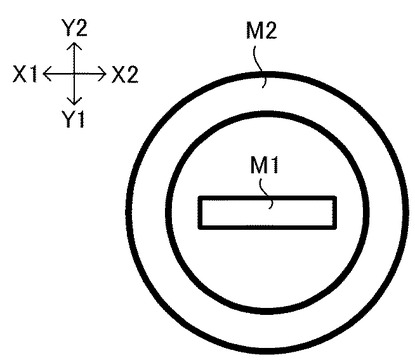
第1検査用マークM1(第1マーク)の形状は、点状(図9参照)に限られない。例えば図28に示すように線状であってもよく、例えば図29に示すようにリング状であってもよい。
【0111】
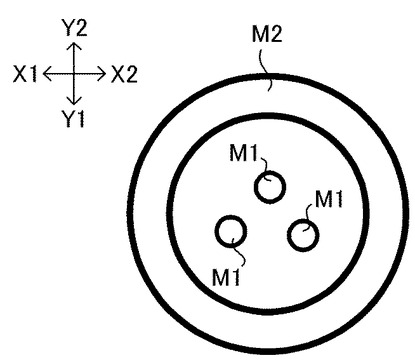
また、例えば図30に示すように、複数(例えば3つ)の第1検査用マークM1が第2検査用マークM2に囲まれるような描画データであってもよい。
【0112】
上記実施形態では、一方が他方を囲むような形状を有する第1マーク及び第2マーク(第1検査用マークM1及び第2検査用マークM2)について、囲まれるマーク(第1検査用マークM1)を描画してから、囲むマーク(第2検査用マークM2)を描画したが、逆に、囲むマーク(第2検査用マークM2)を描画してから、囲まれるマーク(第1検査用マークM1)を描画してもよい。
【0113】
上記実施形態に係る制御ユニット200の機能は、専用のハードウェアによっても、また、通常のコンピュータシステムによっても実現することができる。
【0114】
例えば、上記実施形態において補助記憶装置202に記憶されているプログラムを、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical disk)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータ201にインストールすることにより、上述の処理を実行する装置を構成することができる。
【0115】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、コンピュータ201にダウンロード等するようにしてもよい。
【0116】
また、通信ネットワークを介してプログラムを転送しながら起動実行することによっても、上述の処理を達成することができる。また、プログラムの全部又は一部をサーバ装置上で実行させ、その処理に関する情報をコンピュータ201が通信ネットワークを介して送受信しながらプログラムを実行することによっても、上述の処理を達成することができる。
【0117】
上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータ201にダウンロード等してもよい。
【0118】
その他の点についても、処理ユニット100及び制御ユニット200等の構成は、本発明の趣旨を逸脱しない範囲において任意に変更することができる。
【0119】
例えばステージ30を固定して、描画を行うための光の射出口(例えば露光ヘッド)の位置を移動可能にしてもよい。具体的には、移動させるためのモータ等を設けて、露光ユニット60の射出口(露光ヘッド)を可動式にしてもよい。
【0120】
上記実施形態では、カメラ51が、X方向に一列に配置されたが、カメラ51の数及び配置は任意である。例えばカメラ51をY方向に並べてもよいし、カメラ51を2列以上(例えばマトリックス状)に配置してもよいし、また、カメラ51の数を1つにしてもよい。
【0121】
上記実施形態に係る描画装置の検査方法及びプリント配線板の製造方法は、図6、図16、及び図18A〜図24に示される順序及び内容に限られず、本発明の趣旨を逸脱しない範囲において任意に順序や内容を変更することができる。また、用途等に応じて、必要ない工程を割愛してもよい。
【0122】
以上、本発明の実施形態について説明したが、設計上の都合やその他の要因によって必要となる様々な修正や組み合わせは、「請求項」に記載されている発明や「発明を実施するための形態」に記載されている具体例に対応する発明の範囲に含まれると理解されるべきである。
【産業上の利用可能性】
【0123】
本発明に係る描画装置及びプリント配線板の製造方法は、携帯電話の回路基板などに用いられるプリント配線板の製造に適している。本発明に係る描画装置の検査装置、描画装置の検査方法、及びプログラムは、プリント配線板の製造などに用いられる描画装置の検査に適している。
【符号の説明】
【0124】
10、20 基台
11a、11b、31a レール
21 連結材
30 ステージ
31、32、33 テーブル
31b 棒材
31c、32a ガイド
34、35、36 モータ
34a X位置検出部
35a Y位置検出部
36a Z位置検出部
37 基板固定部
40 脚部
50 天板
51 カメラ
52 モータ
52a カメラ位置検出部
60 露光ユニット
61 光源ユニット
61a 高圧水銀灯
61b 楕円面鏡
62 露光光学系
62a 平面ミラー
62b コリメータレンズ
62c フライアイレンズ
62d リレーレンズ
62e 平面ミラー
62f コンデンサレンズ
62g DMD素子
62h 結像レンズ
63 温度調整ユニット
70 ゲート
100 処理ユニット
101 投入部
102 露光機
102a 搬送部
102b アライメント部
102c 露光部
103 払出部
200 制御ユニット
201 コンピュータ
201a システム制御部
201b データ作成部
201c データ変換部
201d 露光制御部
201e データ補正部
201f ステージ制御部
201g 光源制御部
201h カメラ位置制御部
201i 描画位置検出部
201j 温度制御部
201k データ処理部
202 補助記憶装置
203 入出力インターフェース
204 キーボード
205 モニタ
301 プリント配線板
301a 導体層
301b パッド
302 ソルダーレジスト
303 開口部
1000 描画装置
A1、A11〜A19 第1検査用マーク
A2、A21〜A29 第2検査用マーク
C1、C2 切れ目
L11〜L19 Xライン
L21〜L29 Yライン
M1、M11〜M19 第1検査用マーク
M2、M21〜M29 第2検査用マーク
P1、P2 重心
R11 パターン部
R1〜R4 領域
S 基板
【技術分野】
【0001】
本発明は、描画装置の検査装置、描画装置、プログラム、描画装置の検査方法、及びプリント配線板の製造方法に関する。
【背景技術】
【0002】
特許文献1には、描画装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4244156号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、プリント配線板の製造などにおける描画では、高い精度の位置合わせが要求されることがある。しかしながら、特許文献1に記載される描画装置では、合わせ精度の安定性が十分ではなく、また、手作業で合わせ精度の検査をするため、合わせ精度を確認するために手間や時間がかかるという課題がある。
【0005】
本発明は、こうした実情に鑑みてなされたものであり、より簡単に描画装置の能力を検査し、必要があれば補正することを目的とする。また、本発明は、プリント配線板の製造において、高い位置精度でソルダーレジストに開口部を形成することを他の目的とする。
【課題を解決するための手段】
【0006】
本発明に係る描画装置の検査装置は、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データが記憶されている記憶装置と、前記描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部と、前記描画された第1マークの位置を検出する第1検出部と、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部と、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部と、前記描画された第2マークの位置を検出する第2検出部と、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部と、を有する。
【0007】
本発明に係る描画装置は、前記描画装置の検査装置を有する。
【0008】
本発明に係るプログラムは、コンピュータを、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部、前記描画された第1マークの位置を検出する第1検出部、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部、前記描画された第2マークの位置を検出する第2検出部、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部、として機能させる。
【0009】
本発明に係る描画装置の検査方法は、コンピュータが、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させることと、コンピュータが、前記描画された第1マークの位置を検出することと、コンピュータが、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正することと、コンピュータが、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させることと、コンピュータが、前記描画された第2マークの位置を検出することと、コンピュータが、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めることと、を含む。
【0010】
本発明に係るプリント配線板の製造方法は、前記描画装置によりプリント配線板のソルダーレジストに開口部を形成することを含む。
【発明の効果】
【0011】
本発明によれば、より簡単に描画装置の能力を検査し、必要があれば補正することができる。あるいは、本発明によれば、プリント配線板の製造において、高い位置精度でソルダーレジストに開口部を形成することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る描画装置の概要を示す図である。
【図2】本発明の実施形態に係る露光機の概要を示す図である。
【図3】本発明の実施形態に係る露光機の動作を説明するための図である。
【図4】本発明の実施形態に係る制御ユニットの構成を示す図である。
【図5】本発明の実施形態に係る制御ユニットに含まれるコンピュータの機能ブロック図である。
【図6】本発明の実施形態に係る描画装置の検査方法を示す第1のフローチャートである。
【図7A】本発明の実施形態に係る描画データの第1描画パターンを示す図である。
【図7B】本発明の実施形態において、第1描画パターンの別例を示す図である。
【図8A】本発明の実施形態に係る描画データの第2描画パターンを示す図である。
【図8B】本発明の実施形態において、第2描画パターンの別例を示す図である。
【図9】本発明の実施形態に係る第1検査用マークと第2検査用マークとの関係を示す図である。
【図10】本発明の実施形態に係る描画態様を説明するための図である。
【図11】本発明の実施形態に係る描画装置の検査において、描画された第1描画パターンを示す図である。
【図12】本発明の実施形態に係る描画データの補正において、補正前の描画データを示す図である。
【図13A】本発明の実施形態に係る描画データの補正において、描画データの座標系の補正態様を示す図である。
【図13B】本発明の実施形態に係る描画データの補正において、補正後の描画データを示す図である。
【図14】本発明の実施形態に係る描画データの補正において、補正後の描画態様を示す図である。
【図15】本発明の実施形態に係る描画装置の検査において、第1検査用マーク及び第2検査用マークが描画された基板を示す図である。
【図16】本発明の実施形態に係る描画装置の検査方法を示す第2のフローチャートである。
【図17】本発明の実施形態に係る位置ずれ態様を示す図である。
【図18A】本発明の実施形態に係るプリント配線板の製造方法の第1の工程を説明するための図である。
【図18B】図18Aに示すプリント配線板の平面図である。
【図19A】図18Aの工程の後の第2の工程を説明するための図である。
【図19B】図19Aに示すプリント配線板の平面図である。
【図20】図19Aの工程の後の第3の工程を説明するための図である。
【図21A】図20の工程の後の第4の工程を説明するための図である。
【図21B】図21Aに示すプリント配線板の平面図である。
【図22】本発明の他の実施形態において、所定の場合に限り描画データを補正するようにした描画装置の検査方法を示すフローチャートである。
【図23】本発明の他の実施形態において、補正後の描画データに基づく描画の位置ずれが大きい場合に再度描画データを補正するようにした描画装置の検査方法を示すフローチャートである。
【図24】本発明の他の実施形態において、位置ずれの程度に応じて異なる処理を行うようにした描画装置の検査方法を示すフローチャートである。
【図25A】本発明の実施形態に係る描画データにおいて、第2検査用マークが他の形状を有する第1の別例を示す図である。
【図25B】本発明の実施形態に係る描画データにおいて、第2検査用マークが他の形状を有する第2の別例を示す図である。
【図26】本発明の実施形態に係る描画データにおいて、第2検査用マークが他の形状を有する第3の別例を示す図である。
【図27】本発明の実施形態に係るプリント配線板の製造方法において、プリント配線板の最外層のパッドが他の形状を有する別例を示す図である。
【図28】本発明の実施形態に係る描画データにおいて、第1検査用マークが他の形状を有する第1の別例を示す図である。
【図29】本発明の実施形態に係る描画データにおいて、第1検査用マークが他の形状を有する第2の別例を示す図である。
【図30】本発明の他の実施形態において、複数の第1検査用マークが第2検査用マークに囲まれる描画データを示す図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施形態について、図面を参照しつつ詳細に説明する。なお、図中、矢印X1、X2、Y1、Y2、Z1、Z2は、互いに直交する3軸(XYZ軸)に係る6方向を示している。以下、「上」とは、Z1側を意味し、「下」とは、Z2側を意味する。
【0014】
「光」は、可視光に限られない。光には、可視光のほか、紫外線やX線等の短い波長の電磁波や、赤外線等の長い波長の電磁波も含まれる。
【0015】
「開口部」には、孔や溝のほか、切欠や切れ目等も含まれる。
【0016】
「囲む」には、切れ目のないリングで1つの領域を完全に閉じていること(図9参照)のほか、一部切れ目のあるリングで1つの領域を囲んでいること(図25A参照)や、破線状のリングで1つの領域を囲んでいること(図25B参照)なども、含まれる。リングとは、線の両端をつないで出来る平面図形をいい、円(図9参照)だけでなく、多角形(図26参照)なども、リングに含まれる。
【0017】
「位置ずれ態様」には、位置ずれの量(距離)だけでなく、位置ずれの方向等も含まれる。
【0018】
本実施形態の描画装置1000(詳しくは、検査装置を有する描画装置)は、図1に示すように、処理ユニット100と、制御ユニット200と、を有する。制御ユニット200は、有線又は無線で処理ユニット100と通信可能に接続され、処理ユニット100の各センサから信号(検出値等)を取得するとともに、処理ユニット100の各アクチュエータに指示を与える。
【0019】
処理ユニット100は、投入部101と、露光機102と、払出部103と、を有する。露光機102は、搬送部102aと、アライメント部102bと、露光部102cと、を有する。
【0020】
投入部101は、搬送部102aを介して、払出部103と接続され、搬送部102aは、アライメント部102bを介して、露光部102cと接続されている。これらは相互に基板Sを搬送することができるように接続されている。投入部101にセットされた基板Sは、搬送部102aに投入され、搬送部102aから、アライメント部102bを経て、露光部102cに搬送される。そして、基板Sは、露光部102cで露光された後、アライメント部102bで露光位置(例えばXY座標)を計測されて、搬送部102aを経て、払出部103へと払い出される。本実施形態では、制御ユニット200により、基板Sの搬送(自動搬送)が制御される。
【0021】
図2に、露光機102の概要を示す。本実施形態の露光機102は、例えば所定の描画データに基づいて制御される光(詳しくは、光源から発せられる所定の波長を有する電磁波)により、基板Sに対して所定のパターンを直接描画(露光)するダイレクト方式の露光機(以下、ダイレクトイメージ露光機という)である。露光機102によれば、基板S上に所定の描画データに対応したパターンを露光することができる。本実施形態では、描画データのパターン(以下、描画パターンという)として矩形パターンを用いる(後述の図7A及び図8A参照)。以下、描画パターンのX方向のデータをXラインといい、描画パターンのY方向のデータをYラインという。ただし、描画パターンは矩形パターンに限られず任意である。
【0022】
露光機102は、基台10及び20と、ステージ30と、U字状のゲート70と、を有する。
【0023】
本実施形態では、基台10が、Y方向を長手方向とする直方体の板からなる。そして、基台10上には、Y方向に伸びる2本のレール11a及び11bが敷かれている。
【0024】
基台20は、連結材21を介して、基台10と連結されている。基台20は、例えば直方体のブロックからなり、基台10の両脇(X1側及びX2側)に配置される。
【0025】
ステージ30は、基台10上に配置され、Z2側(基台10側)から、平板状のテーブル31、32、33を、この順で有する。
【0026】
テーブル31上には、X方向に伸びる2本のレール31aが設けられている。また、テーブル31下には、レール11a及び11bと同じ方向(すなわち、Y方向)に伸びる2本の棒材31bが設けられており、各棒材31bには、レール11a及び11bに係合可能なガイド31cが取り付けられている。ガイド31cは、例えば1本のレールにつき2つ設けられる。2本の棒材31bの間隔は、レール11a及び11bの間隔に対応しており、ガイド31cがレール11a及び11bに係合することで、テーブル31(ひいてはステージ30)が、基台10上をレール11a及び11bに沿って(すなわち、Y方向に)移動することが可能になる。ステージ30がY方向に移動するための動力は、例えばモータ35により付与される。本実施形態では、モータ35が、ACサーボモータからなる。また、ステージ30のY方向の位置(以下、Y座標という)は、例えばリニアエンコーダにより検出される。このリニアエンコーダは、後述のY位置検出部35a(図4、図5)に相当する。リニアエンコーダの分解能は、約0.2μmであることが好ましい。
【0027】
また、テーブル32下には、レール31aに係合可能なガイド32aが取り付けられている。ガイド32aは、例えば1本のレールにつき2つ設けられる。ガイド32aがレール31aに係合することで、テーブル32が(さらにはテーブル33も)、テーブル31上をレール31aに沿って(すなわち、X方向に)移動することが可能になる。テーブル32及び33がX方向に移動するための動力は、例えばモータ34により付与される。本実施形態では、モータ34が、ACサーボモータからなる。また、ステージ30のX方向の位置(以下、X座標という)は、例えばリニアエンコーダにより検出される。このリニアエンコーダは、後述のX位置検出部34a(図4、図5)に相当する。リニアエンコーダの分解能は、約0.2μmであることが好ましい。
【0028】
また、テーブル32とテーブル33とは、Z方向に相対移動可能に連結されている。テーブル33は、図示しないZ方向のガイドに沿って、テーブル32に対して上下することができる。テーブル33がZ方向に移動するための動力は、例えばモータ36により付与される。本実施形態では、モータ36が、ACサーボモータからなる。また、テーブル33のZ方向の位置(以下、Z座標という)は、例えばロータリーエンコーダにより検出される。このロータリーエンコーダは、後述のZ位置検出部36a(図4、図5)に相当する。ロータリーエンコーダの分解能は約0.0013μmであることが好ましく、ロータリーエンコーダの指令単位は約0.1μmであることが好ましい。
【0029】
ゲート70は、基台10を跨ぐように設けられている。ステージ30は、Y方向に移動することで、ゲート70をくぐることができる。ゲート70は、脚部40と、天板50と、露光ユニット60と、を有する。
【0030】
脚部40は、基台20上に立設される。基台20が基台10に固定され、脚部40が基台20に固定されることで、ゲート70が基台10に固定されることになる。
【0031】
天板50の前面(Y1側)には、複数(例えば3つ)のカメラ51が取り付けられている。カメラ51の各々は、天板50に対して相対的に移動可能な態様で取り付けられる。詳しくは、これらカメラ51は、例えばX方向に並ぶように配置され、カメラ51の各々は、ステージ30の移動方向(Y方向)に対して直交する方向(すなわち、X方向)に沿って移動可能になっている。
【0032】
テーブル33をカメラ51の下方(アライメント部102b(図1)に相当する位置)に移動させることで、カメラ51により、テーブル33上の基板Sの表面の形態(特に、露光位置)を光学的に認識することができる。テーブル33をY方向に、また、カメラ51をX方向に、それぞれ移動させることで、基板S上の任意の位置(ひいては基板S全面)の形態を認識することが可能になる。本実施形態では、カメラ51が、(露光ヘッド)の近傍に配置される。これにより、カメラ51で露光位置を正確に捉え易くなる。
【0033】
カメラ51は、例えば撮像素子としてのCCD(Charge Coupled Device)からなる。ただしこれに限定されず、カメラ51の数、種類、及び配置は、任意である。例えばカメラ51は、撮像素子としてのCMOS(Complementary Metal Oxide Semiconductor)からなってもよい。
【0034】
カメラ51がX方向に移動するための動力は、例えばモータ52により付与される。本実施形態では、モータ52が、ACサーボモータからなる。また、カメラ51のX座標は、例えばロータリーエンコーダにより検出される。このロータリーエンコーダは、後述のカメラ位置検出部52a(図4、図5)に相当する。ロータリーエンコーダの分解能は約0.0013μmであることが好ましく、ロータリーエンコーダの指令単位は約0.1μmであることが好ましい。
【0035】
露光ユニット60は、光源ユニット61と、露光光学系62と、温度調整ユニット63と、を内蔵している。本実施形態では、露光ユニット60が、投影露光方式で描画(露光)を行う。また、描画を行うための光の射出口(露光ヘッド)の位置は固定されている。なお、露光ユニット60の露光方式は投影露光方式に限られず任意である。
【0036】
光源ユニット61は、図3に示すように、高圧水銀灯61a(光源)と、楕円面鏡61bと、を有する。ただしこれに限定されず、光源ユニット61の構成は任意であり、例えば高圧水銀灯61aに代えて、半導体レーザ等を用いてもよい。光源の波長は、例えば紫外(UV)領域である。
【0037】
露光光学系62は、図2に示すように、平面ミラー62aと、コリメータレンズ62bと、フライアイレンズ62cと、リレーレンズ62dと、平面ミラー62eと、コンデンサレンズ62fと、DMD(Digital Micro-mirror Device:登録商標)素子62gと、結像レンズ62hと、を有する。
【0038】
本実施形態では、8組の露光光学系62がX方向に配列され、それぞれの露光ヘッド(結像レンズ62h)から、基板Sに光が照射される。ここで、DMD素子62gは、マイクロミラー群を有する反射型の空間光変調素子であり、マイクロミラー単位でオン/オフ制御される。各露光光学系62の露光/非露光は、DMD素子62gのマイクロミラーの状態(オン/オフ)に応じて変わる。このため、X方向に配列された各露光光学系62のDMD素子62gのマイクロミラーの状態(例えば角度)を描画パターンに応じて制御することにより、各マイクロミラーの状態に対応したドットパターンとして描画パターンの任意のXラインを描画(露光)することができる。また、各露光光学系62の露光(Xラインの描画)と同期してステージ30を移動させることにより、描画パターン全体を基板Sに描画することができる(詳しくは、後述の図10参照)。なお、露光光学系62の数は任意である。また、空間光変調素子はDMD素子62gに限定されず任意であり、例えばDMD素子62gに代えて、LCD(Liquid Crystal Display)又はAOM(Acoustic Optical Modulator)を用いてもよい。
【0039】
以下、主に図3を参照して、露光機102の、特に露光光学系62の動作について説明する。なお、図3では、便宜上、コリメータレンズ62b等が省略されている。
【0040】
図3に示すように、露光光学系62では、高圧水銀灯61aから発せられた光が平面ミラー62a(コールドミラー)で折り返されることによって、必要な波長の切り出しがなされる。そして、平面ミラー62aで折り返された光は、集光光学素子としてのコリメータレンズ62b(図2)により集光され、インテグレータとしてのフライアイレンズ62c(図2)により均一化される。そして、均一化された光(面状の光)は、リレーレンズ62d(図2)を通過した後、平面ミラー62eにより反射され、コンデンサレンズ62fを通過して、DMD素子62gに入射する。
【0041】
ここで、DMD素子62gは、制御ユニット200(図1)により制御される。詳しくは、制御ユニット200からDMD素子62gに与えられた指示(露光/非露光)が非露光であれば、光はDMD素子62gのマイクロミラーで反射されて基板Sに光は照射されず、指示が露光であれば、光は、DMD素子62gを通過し、結像レンズ62hを介して、基板Sに照射される。
【0042】
温度調整ユニット63は、例えば図示しない温度センサ(温度検出手段)及びヒータ(加熱手段)を有する。本実施形態では、温度調整ユニット63が、制御ユニット200(図1)により制御される。詳しくは、温度センサにより、露光ユニット60内(高圧水銀灯61a及び露光光学系62等)の温度を検出するとともに、その検出値に基づいてヒータを制御することにより露光ユニット60内の温度を所定の温度範囲内に調整することができる。なお、温度調整ユニット63は、加熱手段に代えて又は加えて、冷却手段を有していてもよい。
【0043】
制御ユニット200は、図4に示すように、コンピュータ201と、補助記憶装置202と、入出力インターフェース203と、キーボード204(入力装置)と、モニタ205(出力装置)と、を有する。
【0044】
コンピュータ201は、CPU及びRAM(主記憶装置)を有し、入出力インターフェース203を介して、補助記憶装置202、キーボード204、及びモニタ205の各々と通信可能に接続される。ユーザはキーボード204を操作することにより、データや指示等をコンピュータ201に入力することができる。また、コンピュータ201の演算結果等は、モニタ205に出力(表示)することができる。なお、制御ユニット200は、キーボード204に代えて又は加えて、マウス等の入力装置を有していてもよい。
【0045】
補助記憶装置202としては、ROM、ハードディスク、又はEEPROM(Electrically Erasable and Programmable Read Only Memory)等を用いることができる。補助記憶装置202の数は任意であり、例えば異なる種類の複数の補助記憶装置202を用いることもできる。補助記憶装置202には、各種プログラム、露光条件、及び描画データ等が格納される。
【0046】
処理ユニット100の各センサからの信号(検出値等)は入出力インターフェース203に入力され、処理ユニット100の各アクチュエータへの信号(指示等)は入出力インターフェース203から出力される。
【0047】
図5は、コンピュータ201の機能ブロック図である。コンピュータ201は、図5に示されるように、システム制御部201aと、データ作成部201bと、データ変換部201cと、露光制御部201dと、データ補正部201eと、ステージ制御部201fと、光源制御部201gと、カメラ位置制御部201h(撮像位置制御部)と、描画位置検出部201iと、温度制御部201jと、データ処理部201kと、を有する。これらはそれぞれ、回路等のハードウェア、ROM等に記憶されているソフトウェア(プログラム)、又はハードウェアとソフトウェアとの組み合わせから構成される。
【0048】
本実施形態では、データ作成部201bによりCAD(Computer Aided Design)システムが構築され、コンピュータ201を構成する上記各部(図5)により、CAM(Computer Aided Manufacturing)システム(以下、描画システムという)が構築される。この描画システムにおいては、システム制御部201aが総括して、システム全体を制御する。本実施形態では、システム制御部201aが、描画システムを構築する他の部分と直接的に又は間接的に通信可能に接続されている(図5参照)。これにより、システム制御部201aを介して、描画システム内でのデータの授受や指示の伝達等が可能になる。
【0049】
ユーザは、データ作成部201bにより描画データを作成することができる。データ作成部201bで作成された描画データはデータ変換部201cに向けて出力される。また、別途作成した描画データをデータ変換部201cに入力することもできる。データ変換部201cは、描画データのデータ形式を所定のデータ形式(例えばラスタデータ)に変換する。本実施形態では、描画データが、ベクトルデータとして作成され、データ変換部201cでラスタデータ(ビットマップデータ)に変換される。
【0050】
露光制御部201dは、データ変換部201cにより所定のデータ形式になった描画データに基づいて、DMD素子62g(例えばマイクロミラーのオン/オフ)を制御する。また、データ補正部201eは、補助記憶装置202(図4)に記憶されている所定の描画データと、その描画データに基づいて基板S上に描画された検査用マークの検出位置(以下、描画位置という)とに基づいて、描画データを補正する。露光制御部201dは、データ補正部201eで補正された描画データ(以下、補正後の描画データという)に基づいて、DMD素子62gを制御することもできる。なお、検査用マークの描画位置は、カメラ51により検出することができる。
【0051】
検査用マークの描画(露光)に際して、システム制御部201aは、ステージ制御部201fを通じて、基板固定部37を制御してステージ30上に基板Sを固定し、X位置検出部34a、Y位置検出部35a、及びZ位置検出部36aによりステージ30の位置を確認しながら、ステージ30の位置(詳しくは、モータ34〜36)を制御し、光源制御部201gを通じて、光源ユニット61(詳しくは、光の強度等)を制御する。ステージ制御部201fは、描画中もステージ30を移動させる(後述の図10参照)。
【0052】
描画位置の検出に際して、システム制御部201aは、カメラ位置制御部201hを通じて、カメラ位置検出部52aによりカメラ51の位置を確認しながらカメラ51の位置(詳しくは、モータ52)を制御し、描画位置検出部201iを通じて、カメラ51による検出結果に基づいて検査用マークの描画位置を取得する。
【0053】
また、温度制御部201jは、少なくとも描画中及び検出中において、温度調整ユニット63を制御して、露光ユニット60内の温度を所定の温度範囲内になるように管理する。
【0054】
データ処理部201kは、カメラ51により検出された2つのデータのずれ態様を算出し、その算出結果(ずれ態様)をモニタ205に出力(表示)する。
【0055】
こうした描画装置1000を用いて、例えば図6及び図16に示すような描画装置の検査を行うことができる。本実施形態では、図6の処理で、描画(露光)に基づき描画装置1000(特に、露光機102)に係るデータを取得し、図16の処理で、図6の処理により取得したデータを解析する。
【0056】
なお、コンピュータ201による処理は、例えば所定のプログラムをCPUが実行することで、開始され又は進行する。また、取得したデータ(検出又は算出等)は、例えば補助記憶装置202(図4)に格納される。ただしこれに限られず、データの保存方法は任意である。長期にわたって使用するデータについては、不揮発性の記憶装置に格納することが望ましい。本実施形態では、温度制御部201jが温度調整ユニット63を制御して、常に露光ユニット60内の温度が所定の温度範囲(例えば22℃±1.5℃)内になるように管理している。
【0057】
図6のステップS11で、例えばユーザがキーボード204を操作することにより、コンピュータ201に、検査に用いるパラメータ(基板Sの寸法及び露光条件等)の設定を行う。また、描画データ(例えば、変換後のラスタデータ)は、補助記憶装置202(図4)に格納しておく。
【0058】
図7A〜図8Bに、本実施形態の検査に係る基板Sの寸法及び描画パターン(第1描画パターン及び第2描画パターン)を示す。各図中、幅d11は、基板Sの横(X方向)の幅を示し、幅d12は、基板Sの縦(Y方向)の幅を示している。
【0059】
本実施形態では、図7A及び図8Aに示すように、基板Sとして、横(X方向)に長い矩形基板を用いる。具体的には、幅d11が例えば510mmであり、幅d12が例えば340mmである。しかしこれに限られず、例えば図7B及び図8Bに示すように、基板Sとして、縦(Y方向)に長い矩形基板(例えば縦510m×横340mm)を用いてもよい。あるいは、基板Sは正方形の基板であってもよい。描画装置1000の状態等に応じて、適切な基板S(検査用の基板)を選択することが好ましい。
【0060】
本実施形態で用いる描画パターンは、図7Aに示される第1描画パターン、及び図8Aに示される第2描画パターンである。図7A及び図8Aに示されるように、第1描画パターン及び第2描画パターンはそれぞれ、格子状(マトリクス状)の矩形パターンである。第1描画パターンでは、例えば点状(詳しくは、円形状)の第1検査用マークM1が横(X方向)及び縦(Y方向)にそれぞれ9つずつ略一定の間隔で配置される。第2描画パターンでは、例えば円形リング状の第2検査用マークM2が横(X方向)及び縦(Y方向)にそれぞれ9つずつ略一定の間隔で配置される。すなわち、本実施形態に係る描画パターンは、9本のXラインL11〜L19と9本のYラインL21〜L29とを有する。また、図9に示すように、第2描画パターンに係る第2検査用マークM2はそれぞれ、第1描画パターンに係る第1検査用マークM1を囲むように配置される。本実施形態では、第1検査用マークM1の重心位置と第2検査用マークM2の重心位置とが一致する。そして、こうした関係を有する第1検査用マークM1及び第2検査用マークM2はそれぞれ、基板Sの略全面に配置される。
【0061】
なお、描画データのパターン(第1描画パターン及び第2描画パターン)は、図7A及び図8Aに示されるパターンに限られず任意である。例えば図7B及び図8Bに示すように、描画データのパターンは、縦(Y方向)に長い矩形パターンであってもよい。あるいは、描画データのパターンは正方形パターン又は円形パターンであってもよい。また、第1検査用マークM1及び第2検査用マークM2の形状も円に限られず任意である(図26参照)。描画装置1000の状態等に応じて、適切な描画データを選択することが好ましい。
【0062】
検査に必要な準備が全て完了したら、例えばキーボード204を通じてコンピュータ201に指令を送ることにより、検査用プログラムを実行する。ただしこれに限定されず、所定条件の成立に基づき、自動的に実行されるようにしてもよい。
【0063】
続けて、図6のステップS12で、基板Sを露光機102(詳しくは、搬送部102a)に投入する。具体的には、例えば作業者が投入部101(図1)に基板Sをセットし、整列後、制御ユニット200(詳しくは、コンピュータ201)が図示しない搬送ロボット等を制御することにより、投入部101にセットされた基板Sを搬送部102a(図1)に搬送する。
【0064】
なお、投入に先立ち、基板Sの表面には感光性を有する層(以下、感光層という)を形成しておく。具体的には、例えば投入に先立ち、基板S上に感光性ドライフィルムを貼り付ける。ただしこれに限られず、例えばフォトレジストを基板Sの表面に塗布してもよい。
【0065】
続けて、図6のステップS13で、描画データに基づいて、基板S(詳しくは、その感光層)に第1検査用マークM1(図7A)を描画(露光)する。以下、主に図2及び図5を参照して、本実施形態に係る描画方法(露光方法)について説明する。
【0066】
露光部102c(図1)で露光(描画)される基板Sは、搬送部102a(図1)に相当する位置でテーブル33上に載置され、基板固定部37(図4、図5)によりテーブル33上に固定される。詳しくは、基板固定部37は、ステージ制御部201fの指示に基づき作動して、テーブル33上に基板を固定する。基板固定部37は、例えばバキューム吸着装置からなる。
【0067】
続けて、ステージ制御部201fがモータ35を制御することにより、ステージ30が基台10上をレール11a及び11bに沿ってY2側に移動する。これにより、基板Sが、露光部102cに相当する位置(結像レンズ62hの下方)、詳しくは最初の露光位置まで搬送される。
【0068】
また、必要に応じて、ステージ制御部201fは、描画データに基づき、X位置検出部34a、Y位置検出部35a、及びZ位置検出部36aによりステージ30の位置を確認しながらモータ34〜36を制御して、ステージ制御部201fのX、Y、Z座標を調整する。
【0069】
続けて、基板Sに第1描画パターン(図7A参照)を描画する。具体的には、図10に示すように、基板Sの横幅(X方向の幅)は8つ(露光光学系62の数に対応)のバンドB11〜B18に区分され、それらバンドB11〜B18の各々が、対応する位置の露光光学系62に割り当てられる。また、バンドB11〜B18の各々は、さらに3つの領域(描画バンドB1〜B3)に区分され、バンドB11〜B18の各々における描画バンドB1〜B3を、各露光光学系62の描画ヘッドが順に描画していく。各露光光学系62による露光を行いながら、ステージ30をY方向又はX方向に移動させることにより、描画バンドB1、B2、B3をこの順で描画する。そして、露光光学系62の描画ヘッドが基板Sを縦方向(Y方向)に1.5往復することで、基板S全域がスキャンされる。その結果、第1描画パターン全体(詳しくは、その第1描画パターンを構成する全ての第1検査用マークM1)が基板Sに描画される。描画バンドB1〜B3の幅は、例えばそれぞれ22.5mmであり、バンドB11〜B18の幅は、例えばそれぞれ67.5mm(=22.5mm×3)であり、最大描画幅は、例えば540mm(=67.5mm×8)である。以下、描画データに係る第1検査用マークを第1検査用マークM1というのに対し、実際に描画された第1検査用マークを第1検査用マークA1という。
【0070】
露光光学系62による露光は、例えば光源制御部201gが光源ユニット61を、また、露光制御部201dがDMD素子62gを、それぞれ制御することにより行われる。露光制御部201dは、データ変換部201cにより所定のデータ形式(例えばラスタデータ)に変換された描画データ(図7A参照)に基づいて、DMD素子62gのマイクロミラーのオン/オフを制御する。こうすることで、露光光学系62により露光される各Xラインのドットパターンが、描画データの各Xラインに対応したものとなる。
【0071】
また、描画中のステージ30の移動は、ステージ制御部201fがモータ34、35を制御することにより行われる。ステージ制御部201fは、例えば間欠的に又は連続的にステージ30をY方向又はX方向に移動させる。
【0072】
上記露光により、描画データ(図7A参照)に対応したパターンを有する第1検査用マークA1(図11参照)が基板Sに描画される。ただし、露光機102の合わせ精度(狙いどおりの位置に正確に描画する能力の高さ)は露光機102の状態等の影響を受けるため、必ずしも描画データに係る第1検査用マークM1の位置と実際に描画された第1検査用マークA1の位置(描画位置)とは一致しない。そこで、続く図6のステップS14では、カメラ51により、第1検査用マークA1の描画位置を検出する。本実施形態の露光機102は3台のカメラ51を有するため、同一のY座標に位置するマークを3個同時に読み込むことができる。また、読み込み精度を向上させるためには、所定のタイミングで、カメラ51の原点位置の確認動作を行うことが好ましい。カメラ51による位置検出は、所定の部分についての露光が終わる度に行ってもよいが、作業効率を向上させる上では、パターン全ての露光後に行うことが好ましい。
【0073】
本実施形態では、図11に示すように、描画された81個(=9×9個)の第1検査用マークA1のうち、基板Sの四隅の第1検査用マークA11〜A14と、基板Sの各辺の中点近傍の第1検査用マークA15〜A18と、基板Sの重心の第1検査用マークA19とについての描画位置を検出する。なお、第1検査用マークA11〜A14、A15〜A18、A19に対応する描画データをそれぞれ、第1検査用マークM11〜M14、M15〜M18、M19という。
【0074】
第1検査用マークA1の描画位置を検出する際には、ステージ制御部201fがモータ34、35を制御することにより、ステージ30のY方向又はX方向の位置を制御し、また、カメラ位置制御部201hが、カメラ位置検出部52aによりカメラ51の位置を確認しながらモータ52を制御することにより、カメラ51のX方向の位置を制御する。これにより、ステージ30をアライメント部102b(図1)に移動させ、基板S上の任意の第1検査用マークA1をカメラ51の下方に配置することができる。そして、描画位置検出部201iが、カメラ51からの信号(撮像信号)に基づいて所定の信号処理(画像処理及び演算等)を行うことで、第1検査用マークA1の描画位置を取得することができる。
【0075】
続けて、図6のステップS15で、データ補正部201eが、補助記憶装置202(図4)に記憶されている描画データ(第1検査用マークM11〜M19)と、その描画データに基づいて基板S上に描画された第1検査用マークA11〜A19の位置(描画位置)とに基づいて、描画データを補正する。以下、図12〜図14を参照して、この補正について説明する。
【0076】
例えば図12に示すような描画データの第1検査用マークM1に基づいて描画を行い、実際には、図13Aに示すように第1検査用マークA1が基板S(図11参照)に描画された場合には、第1検査用マークM1と第1検査用マークA1との間に位置ずれが生じているため、そのずれに基づいて、描画データの座標系(XY座標軸)を補正する。詳しくは、図13Aに示すように、ずれた分だけ、第1検査用マークM1を反対側に補正するとともに、それに合わせて(データを補間して)描画データの座標系を歪ませる。アライメントマークを認識し、アライメントマークの伸縮に合わせて描画データも伸縮させることによって、描画データの座標と実際に描画される基板S上の座標とを一致させる。以下、補正後の第1検査用マークを第1検査用マークM1’といい、補正後の座標系におけるX軸、Y軸を、それぞれ軸X’、軸Y’という。補正前の描画データの座標は軸X、軸Yで規定され、補正後の描画データの座標は軸X’、軸Y’で規定される(図12に示すパターンM10及び図13Bに示すパターンM10’参照)。
【0077】
図13Bに、補正後の描画データを示す。例えば、この補正後の描画データの第1検査用マークM1’及びパターンM10’に基づいて描画を行えば、図14に示すように、第1検査用マークA1及びパターンA10が基板S(図12参照)に描画されると考えられる。
【0078】
こうした補正を、第1検査用マークM11〜M19(図11)の9点について行う。補正値は、補正前の描画データとは別に、補助記憶装置202(図4)に格納する。これにより、露光制御部201dは、補正後の描画データ(補正前の描画データに補正値を反映したデータ)に基づいて、DMD素子62gを制御するようになる。ただしこれに限られず、補正前の描画データを消去して、補正後の描画データに更新(上書き保存)してもよい。また、描画データが補正された場合に自動的に露光制御部201dが補正後の描画データを用いるようにしてもよいし、補正前の描画データと補正後の描画データのいずれを用いるかユーザが選択できるようにしてもよい。
【0079】
なお、補正の手法は、上記手法に限られず任意である。例えば9点のみではなく、全ての第1検査用マークM1について位置の検出及び描画データの補正を行ってもよい。また、有限要素法等を用いて、より複雑な補正を行ってもよい。
【0080】
続けて、図6のステップS16で、補正された描画データに基づいて、ステップS13で描画された第1検査用マークA1の各々を囲むように、基板S(詳しくは、その感光層)に第2検査用マークM2(図8A)を描画(露光)する。なお、描画データに係る第2検査用マークを第2検査用マークM2というのに対し、実際に描画された第2検査用マークを第2検査用マークA2という。また、第1検査用マークA11〜A14、A15〜A18、A19に対応する第2検査用マークA2をそれぞれ、第2検査用マークA21〜A24、A25〜A28、A29という。
【0081】
図6のステップS16において、第1検査用マークA1を描画するとき(図6のステップS13)と同様の傾向で狙った位置(描画データ)からずれて第2検査用マークA2が描画されれば、第1検査用マークA1の各々を囲むように、第2検査用マークA2が描画されると考えられる。第2検査用マークA2を描画するときの制御態様(ステージ30、光源ユニット61、及び露光光学系62等の制御態様)は、第1検査用マークA1を描画するとき(図6のステップS13)と同様である。ただし、本実施形態では、上記のように、補正された描画データ(補正後の座標系)に基づいて、すでに描画された第1検査用マークA1の位置を狙って、第2検査用マークA2の各々が描画される。これにより、図15に示すように、基板Sに描画されている第1検査用マークA1の各々を囲むように、第2検査用マークA2が描画されると考えられる。
【0082】
続けて、図6のステップS17で、カメラ51により、第2検査用マークA2の描画位置を検出する。詳しくは、第1検査用マークA1の描画位置の検出(図6のステップS14)に対応して、基板Sの四隅の第2検査用マークA21〜A24と、基板Sの各辺の中点近傍の第2検査用マークA25〜A28と、基板Sの重心の第2検査用マークA29とについての描画位置を検出する。なお、第2検査用マークA21〜A24、A25〜A28、A29に対応する描画データをそれぞれ、第2検査用マークM21〜M24、M25〜M28、M29という。
【0083】
本実施形態では、描画位置検出部201iが、カメラ51からの信号(撮像信号)に基づいて所定の信号処理(画像処理及び演算等)を行うことで、第2検査用マークA2の描画位置を取得する。なお、第2検査用マークA2の描画位置を検出するときの制御態様(ステージ30、カメラ51等の制御態様)は、第1検査用マークA1の描画位置を検出するとき(図6のステップS14)と同様である。
【0084】
続けて、図6のステップS18で、露光機102から払出部103へ基板Sを払い出す(図1参照)。具体的には、ステージ制御部201fがモータ35を制御することにより、アライメント部102bから搬送部102aへ基板Sを搬送し、制御ユニット200(詳しくは、コンピュータ201)が図示しない搬送ロボット等を制御することにより、基板Sを払出部103へ払い出す。
【0085】
以上説明したように、図6の処理により、描画装置1000(特に、露光機102)に係るデータとして、第1検査用マークA11〜A19の描画位置及び第2検査用マークA21〜A29の描画位置を取得することができる。次に、図16の処理で、図6の処理により取得したデータを解析する。図16の処理は、例えば図6のステップS17で第2検査用マークA2の描画位置が検出されることにより自動的に開始される。
【0086】
図16のステップS21では、データ処理部201kが、第1検査用マークA1(詳しくは、図11に示される第1検査用マークA11〜A19)の描画位置と第2検査用マークA2(詳しくは、図15に示される第2検査用マークA21〜A29)の描画位置との位置ずれ態様を求める。本実施形態では、位置ずれ態様として位置ずれ量を採用する。ただしこれに限られず、求める位置ずれ態様は任意であり、例えば方向(例えば角度)を含むベクトルを、位置ずれ態様として求めてもよい。
【0087】
本実施形態では、データ処理部201kが、図6のステップS14で検出された第1検査用マークA1の描画位置(例えばXY座標)と図6のステップS17で検出された第2検査用マークA2の描画位置(例えばXY座標)とに基づいて、図17に示されるような、第1検査用マークA1の重心P1と第2検査用マークA2の重心P2(詳しくは、リングが描く図形の重心)との位置ずれ量(距離d10)を算出する。
【0088】
距離d10は、機械合わせ精度に相当する。カメラ51の読み込み及び認識の誤差に相当するアライメント精度をCp1、機械の書き込み位置の誤差に相当する描画精度をCp2、データ変換誤差に相当するDAT補正精度をCp3、温度変化による機械の歪みに相当する機内温度変化をCp4とするとき、機械合わせ精度=√(Cp12+Cp22+Cp32+Cp42)と表すことができる。
【0089】
工程でのデータ分布と規格との数的関係を表す工程能力指数をCpという。Cpは、データの分布の中心(=平均値)が上限規格値と下限規格値の中央にあることが前提となっていて、ずれは考慮されない。そこで、平均値が上下規格の中心からずれている(偏りがある)場合に用いる指標が、Cpkである。Cpk(Cpu又はCpl)は、距離d10のデータ分布の平均と標準偏差σから以下の(式1)〜(式3)を使って求めることができる。
(式1)上限規格のみの場合:Cpu=(上限規格値−平均値)/3σ
(式2)下限規格のみの場合:Cpl=(下限規格値−平均値)/3σ
(式3)両側規格の場合:CpuとCplの小さい方の値
【0090】
続けて、図16のステップS22で、データ処理部201kが、上記位置ずれ態様(例えば距離d10)及びそれに基づき算出されたパラメータ(例えばCpk)を、モニタ205に表示させる。この際、データは、数値のまま表示してもよいし、グラフィック化して(グラフ、図表、平面図、又は立体図等として)表示してもよい。これにより、ユーザは、描画装置1000の描画精度(合わせ精度)などを確認することができる。なお、上記位置ずれ態様及びそれに基づき算出されたパラメータのいずれか一方のみをモニタ205に表示してもよい。
【0091】
本実施形態に係る描画装置の検査装置(制御ユニット200)は、第1マーク(第1検査用マークM1)と、第1マークを囲む第2マーク(第2検査用マークM2)と、を含む描画データが記憶されている記憶装置(補助記憶装置202)と、描画データに基づいて、露光機102に第1マークを描画させる第1描画部(露光制御部201d及び光源制御部201g等)と、描画された第1マーク(第1検査用マークA1)の位置を検出する第1検出部(描画位置検出部201i)と、描画データと検出された第1マークの位置とに基づいて、描画データを補正する補正部(データ補正部201e)と、補正された描画データに基づいて、描画された第1マークを囲むように、露光機102に第2マークを描画させる第2描画部(露光制御部201d及び光源制御部201g等)と、描画された第2マーク(第2検査用マークA2)の位置を検出する第2検出部(描画位置検出部201i)と、検出された第1マークの位置と検出された第2マークの位置とに基づいて、両者の位置ずれ態様(距離d10)を求めるずれ取得部(データ処理部201k)と、を有する(図1、図4、図5、図7A、図8A、図17参照)。このため、より簡単に露光機102の能力(特に、露光機102の状態等の影響を受ける合わせ精度)を検査し、補正することが可能になる。また、各処理(図6、図16参照)の自動化により短時間で検査を行うことが可能になる。
【0092】
特にダイレクトイメージ露光機においては、露光機102の合わせ精度が品質又は生産性に大きく影響するため、上記検査装置(制御ユニット200)は、ダイレクトイメージ露光機の検査に用いることが有効である。
【0093】
本実施形態に係る描画装置の検査装置(制御ユニット200)は、位置ずれ態様及びそれに基づき算出されたパラメータを表示装置(モニタ205)に表示させる表示指示部(データ処理部201k)を有する。これにより、ユーザが、モニタ205に表示されたデータを見て、容易に露光機102の合わせ精度を確認することが可能になる。
【0094】
図16の処理の後、ユーザが、モニタ205に表示されたデータを見て、十分な描画精度が得られていると判断した場合には、例えば図18A〜図20Bに示すように、その描画装置1000を用いて、プリント配線板のソルダーレジストに開口部を形成することができる。以下、図18A〜図21Bを参照して、このことについてさらに説明する。
【0095】
例えば図18A及び図18Bに示すように、ソルダーレジストを形成する前のプリント配線板301を用意する。プリント配線板301の最外層の導体層301aは、配線のほか、電子部品(例えば半導体素子)又は他の配線板(例えばマザーボード)等を実装するためのパッド301bを含む。図18Bに示されるように、パッド301bの形状(X−Y平面)は、例えば円形である。ただしこれに限られず、パッド301bの形状(X−Y平面)は任意である(後述の図27参照)。
【0096】
続けて、図19A及び図19Bに示すように、プリント配線板301上にソルダーレジスト302を形成する。ソルダーレジスト302は、描画装置1000の光源に対応した感光性材料(例えばネガレジスト)からなる。
【0097】
続けて、描画装置1000により、ソルダーレジスト302に開口部を形成すべく、図20に示すように、前述した第2検査用マークA2の描画(図6のステップS16)と同様の態様で、ソルダーレジスト302に、パッド301bの形状に対応した円状の描画を行う。ただしここでは、円状のパターン部R11を除く部分を露光して、現像液に対して不溶化する。その後、現像により円状のパターン部R11(未露光部分)を除去する。
【0098】
これにより、図21A及び図21Bに示すように、パッド301b上のソルダーレジスト302に、パッド301bの中央部を露出させるような円柱状の開口部303を形成することができる。
【0099】
プリント配線板では、最外層のパッド301bとソルダーレジスト302の開口部303との位置精度が重要になる。この点、本実施形態では、描画装置1000について予め前述の検査(図6及び図16参照)において、パッド301bを想定した点状の第1検査用マークM1に対して、開口部303を形成するための描画を想定した、第1検査用マークM1を囲むリング状の第2検査用マークM2の描画を行って、その描画の位置精度を確保しているため、描画装置1000を用いてプリント配線板を製造する場合において、最外層のパッド301bとソルダーレジスト302の開口部303との位置精度を高め易くなる。また、ソルダーレジスト302の開口部303を的確な位置に形成し易くなることで、プリント配線板のファイン化が容易になる。
【0100】
こうして製造されたプリント配線板は、携帯電話又は小型コンピュータ等の回路基板として使用することができる。
【0101】
他方、図16の処理の後、ユーザが、モニタ205に表示されたデータを見て、十分な描画精度が得られていないと判断した場合には、例えば露光機102の機械的な調整を行ったり、もう一度検査(図6、図16参照)を行ったりすることが好ましい。
【0102】
上記実施形態では、ソルダーレジスト302としてネガレジストを用いる場合について説明したが、ソルダーレジスト302としてポジレジストを用いてもよい。
【0103】
本発明は、上記実施形態に限定されない。例えば以下のように変形して実施することもできる。
【0104】
上記実施形態において、描画データの補正(図6のステップS15)を常に行うことは必須ではない。例えば図6の処理に代えて、図22の処理を行ってもよい。図22の例では、図6と同様の内容のステップS11〜S14の後、ステップS14aで、データ処理部201k(図5)が、描画データと第1検査用マークA1との位置ずれ態様(例えばCpk)を算出し、続くステップS14bで、データ処理部201k(図5)が、その算出値(例えばCpk)が所定の閾値よりも大きいか否かを判断する。そして、閾値よりも大きい算出値(位置ずれ)があると判断された場合には(ステップS14b:Yes)、描画データの補正(ステップS15)を行い、閾値よりも大きい算出値(位置ずれ)がないと判断された場合には(ステップS14b:No)、描画データの補正を行わずに、続くステップS16〜S18の処理(図6の処理と同様)を行う。
【0105】
上記実施形態では、図16のステップS21で算出した位置ずれ態様等をモニタ205(図4)に表示し、ユーザが、露光機102の合わせ精度を確認するようにしたが、これに限定されない。例えば図16の処理に代えて、図23又は図24の処理を行ってもよい。
【0106】
図23の例では、図16と同様の内容のステップS21で位置ずれ態様等を算出した後、データ処理部201k(図5)が、その算出値(例えば図17に示される距離d10)が所定の閾値よりも大きいか否かを判断する。そして、閾値よりも大きい算出値(位置ずれ)があると判断された場合には(ステップS22a:Yes)、続くステップS23で、再度、図6の処理及び図16の処理を自動的に実行する。
【0107】
また、図24の例では、位置ずれの程度を複数の段階(例えば小、中、大)に分けて、位置ずれの程度に応じて、異なる処理を行う。具体的には、図16と同様の内容のステップS21で位置ずれ態様等を算出した後、データ処理部201k(図5)が、その算出値(例えば図17に示される距離d10)が所定の閾値K1よりも大きいか否かを判断する。そして、閾値K1よりも大きい算出値があると判断された場合には(ステップS22a:Yes)、続くステップS22bで、その算出値(例えば距離d10)が、閾値K1よりも大きい所定の閾値K2よりも大きいか否かを判断する。そして、閾値K2よりも大きい算出値がある(位置ずれの程度=大)と判断された場合には(ステップS22b:Yes)、続くステップS23aで、アラームを発する。アラームは任意であり、音(音声を含む)であっても、モニタ205への表示であっても、又はランプの点灯であってもよい。また、ステップS22bで、閾値K2よりも大きい算出値がない(位置ずれの程度=中)と判断された場合には(ステップS22b:No)、続くステップS23で、再度、図6の処理及び図16の処理を自動的に実行する。また、ステップS22aで、閾値K1よりも大きい算出値がない(位置ずれの程度=小)と判断された場合には(ステップS22a:No)、続くステップS22で、ステップS21で算出した位置ずれ態様等をモニタ205に表示する。
【0108】
第2検査用マーク(第2マーク)の形状は、図9に示されるような切れ目のないリング状に限られず、第1検査用マーク(第1マーク)を囲むものであれば任意である。第2検査用マークの形状は、例えば図25Aに示すように、例えば切れ目C1のある円形リングであってもよく、例えば図25Bに示すように、複数の切れ目C2のある破線状の円形リングであってもよい。
【0109】
第1検査用マークM1及び第2検査用マークM2の形状(X−Y平面)はそれぞれ、円状に限られず、例えば図26に示すように、多角形状(例えば四角形状)であってもよい。図27に示すように、四角形状のパッド301b上のソルダーレジスト302に四角形状の開口部303を形成する場合には、四角形状の第1検査用マークM1及び第2検査用マークM2(図26)を用いることが好ましい。
【0110】
第1検査用マークM1(第1マーク)の形状は、点状(図9参照)に限られない。例えば図28に示すように線状であってもよく、例えば図29に示すようにリング状であってもよい。
【0111】
また、例えば図30に示すように、複数(例えば3つ)の第1検査用マークM1が第2検査用マークM2に囲まれるような描画データであってもよい。
【0112】
上記実施形態では、一方が他方を囲むような形状を有する第1マーク及び第2マーク(第1検査用マークM1及び第2検査用マークM2)について、囲まれるマーク(第1検査用マークM1)を描画してから、囲むマーク(第2検査用マークM2)を描画したが、逆に、囲むマーク(第2検査用マークM2)を描画してから、囲まれるマーク(第1検査用マークM1)を描画してもよい。
【0113】
上記実施形態に係る制御ユニット200の機能は、専用のハードウェアによっても、また、通常のコンピュータシステムによっても実現することができる。
【0114】
例えば、上記実施形態において補助記憶装置202に記憶されているプログラムを、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical disk)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータ201にインストールすることにより、上述の処理を実行する装置を構成することができる。
【0115】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、コンピュータ201にダウンロード等するようにしてもよい。
【0116】
また、通信ネットワークを介してプログラムを転送しながら起動実行することによっても、上述の処理を達成することができる。また、プログラムの全部又は一部をサーバ装置上で実行させ、その処理に関する情報をコンピュータ201が通信ネットワークを介して送受信しながらプログラムを実行することによっても、上述の処理を達成することができる。
【0117】
上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータ201にダウンロード等してもよい。
【0118】
その他の点についても、処理ユニット100及び制御ユニット200等の構成は、本発明の趣旨を逸脱しない範囲において任意に変更することができる。
【0119】
例えばステージ30を固定して、描画を行うための光の射出口(例えば露光ヘッド)の位置を移動可能にしてもよい。具体的には、移動させるためのモータ等を設けて、露光ユニット60の射出口(露光ヘッド)を可動式にしてもよい。
【0120】
上記実施形態では、カメラ51が、X方向に一列に配置されたが、カメラ51の数及び配置は任意である。例えばカメラ51をY方向に並べてもよいし、カメラ51を2列以上(例えばマトリックス状)に配置してもよいし、また、カメラ51の数を1つにしてもよい。
【0121】
上記実施形態に係る描画装置の検査方法及びプリント配線板の製造方法は、図6、図16、及び図18A〜図24に示される順序及び内容に限られず、本発明の趣旨を逸脱しない範囲において任意に順序や内容を変更することができる。また、用途等に応じて、必要ない工程を割愛してもよい。
【0122】
以上、本発明の実施形態について説明したが、設計上の都合やその他の要因によって必要となる様々な修正や組み合わせは、「請求項」に記載されている発明や「発明を実施するための形態」に記載されている具体例に対応する発明の範囲に含まれると理解されるべきである。
【産業上の利用可能性】
【0123】
本発明に係る描画装置及びプリント配線板の製造方法は、携帯電話の回路基板などに用いられるプリント配線板の製造に適している。本発明に係る描画装置の検査装置、描画装置の検査方法、及びプログラムは、プリント配線板の製造などに用いられる描画装置の検査に適している。
【符号の説明】
【0124】
10、20 基台
11a、11b、31a レール
21 連結材
30 ステージ
31、32、33 テーブル
31b 棒材
31c、32a ガイド
34、35、36 モータ
34a X位置検出部
35a Y位置検出部
36a Z位置検出部
37 基板固定部
40 脚部
50 天板
51 カメラ
52 モータ
52a カメラ位置検出部
60 露光ユニット
61 光源ユニット
61a 高圧水銀灯
61b 楕円面鏡
62 露光光学系
62a 平面ミラー
62b コリメータレンズ
62c フライアイレンズ
62d リレーレンズ
62e 平面ミラー
62f コンデンサレンズ
62g DMD素子
62h 結像レンズ
63 温度調整ユニット
70 ゲート
100 処理ユニット
101 投入部
102 露光機
102a 搬送部
102b アライメント部
102c 露光部
103 払出部
200 制御ユニット
201 コンピュータ
201a システム制御部
201b データ作成部
201c データ変換部
201d 露光制御部
201e データ補正部
201f ステージ制御部
201g 光源制御部
201h カメラ位置制御部
201i 描画位置検出部
201j 温度制御部
201k データ処理部
202 補助記憶装置
203 入出力インターフェース
204 キーボード
205 モニタ
301 プリント配線板
301a 導体層
301b パッド
302 ソルダーレジスト
303 開口部
1000 描画装置
A1、A11〜A19 第1検査用マーク
A2、A21〜A29 第2検査用マーク
C1、C2 切れ目
L11〜L19 Xライン
L21〜L29 Yライン
M1、M11〜M19 第1検査用マーク
M2、M21〜M29 第2検査用マーク
P1、P2 重心
R11 パターン部
R1〜R4 領域
S 基板
【特許請求の範囲】
【請求項1】
一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データが記憶されている記憶装置と、
前記描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部と、
前記描画された第1マークの位置を検出する第1検出部と、
前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部と、
前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部と、
前記描画された第2マークの位置を検出する第2検出部と、
前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部と、
を有する、
ことを特徴とする描画装置の検査装置。
【請求項2】
前記第1マークは、点状の形状を有し、
前記第2マークは、前記第1マークを囲むリング状の形状を有する、
ことを特徴とする請求項1に記載の描画装置の検査装置。
【請求項3】
前記位置ずれ態様は、前記検出された第1マークの重心と前記検出された第2マークの重心との距離である、
ことを特徴とする請求項1又は2に記載の描画装置の検査装置。
【請求項4】
前記第1マーク及び前記第2マークを撮像するための撮像素子を有し、
前記第1検出部及び前記第2検出部はそれぞれ、前記撮像素子からの信号に基づいて、前記第1マークの位置又は前記第2マークの位置を求める、
ことを特徴とする請求項1乃至3のいずれか一項に記載の描画装置の検査装置。
【請求項5】
前記撮像素子の位置を制御する撮像位置制御部を有する、
ことを特徴とする請求項4に記載の描画装置の検査装置。
【請求項6】
前記描画を行う際に描画位置に応じて、被描画体を載せたステージの位置を制御するステージ制御部を有する、
ことを特徴とする請求項1乃至5のいずれか一項に記載の描画装置の検査装置。
【請求項7】
前記描画装置の露光光学系の温度を管理する温度制御部を有する、
ことを特徴とする請求項1乃至6のいずれか一項に記載の描画装置の検査装置。
【請求項8】
前記位置ずれ態様及びそれに基づき算出されたパラメータの少なくとも一方を表示装置に表示させる表示指示部を有する、
ことを特徴とする請求項1乃至7のいずれか一項に記載の描画装置の検査装置。
【請求項9】
請求項1乃至8のいずれか一項に記載の描画装置の検査装置を有する、
ことを特徴とする描画装置。
【請求項10】
前記描画を行うための光の射出口の位置は固定されている、
ことを特徴とする請求項9に記載の描画装置。
【請求項11】
コンピュータを、
一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部、
前記描画された第1マークの位置を検出する第1検出部、
前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部、
前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部、
前記描画された第2マークの位置を検出する第2検出部、
前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部、
として機能させるためのプログラム。
【請求項12】
コンピュータが、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させることと、
コンピュータが、前記描画された第1マークの位置を検出することと、
コンピュータが、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正することと、
コンピュータが、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させることと、
コンピュータが、前記描画された第2マークの位置を検出することと、
コンピュータが、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めることと、
を含む、
ことを特徴とする描画装置の検査方法。
【請求項13】
請求項9又は10に記載の描画装置によりプリント配線板のソルダーレジストに開口部を形成することを含む、
ことを特徴とするプリント配線板の製造方法。
【請求項1】
一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データが記憶されている記憶装置と、
前記描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部と、
前記描画された第1マークの位置を検出する第1検出部と、
前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部と、
前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部と、
前記描画された第2マークの位置を検出する第2検出部と、
前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部と、
を有する、
ことを特徴とする描画装置の検査装置。
【請求項2】
前記第1マークは、点状の形状を有し、
前記第2マークは、前記第1マークを囲むリング状の形状を有する、
ことを特徴とする請求項1に記載の描画装置の検査装置。
【請求項3】
前記位置ずれ態様は、前記検出された第1マークの重心と前記検出された第2マークの重心との距離である、
ことを特徴とする請求項1又は2に記載の描画装置の検査装置。
【請求項4】
前記第1マーク及び前記第2マークを撮像するための撮像素子を有し、
前記第1検出部及び前記第2検出部はそれぞれ、前記撮像素子からの信号に基づいて、前記第1マークの位置又は前記第2マークの位置を求める、
ことを特徴とする請求項1乃至3のいずれか一項に記載の描画装置の検査装置。
【請求項5】
前記撮像素子の位置を制御する撮像位置制御部を有する、
ことを特徴とする請求項4に記載の描画装置の検査装置。
【請求項6】
前記描画を行う際に描画位置に応じて、被描画体を載せたステージの位置を制御するステージ制御部を有する、
ことを特徴とする請求項1乃至5のいずれか一項に記載の描画装置の検査装置。
【請求項7】
前記描画装置の露光光学系の温度を管理する温度制御部を有する、
ことを特徴とする請求項1乃至6のいずれか一項に記載の描画装置の検査装置。
【請求項8】
前記位置ずれ態様及びそれに基づき算出されたパラメータの少なくとも一方を表示装置に表示させる表示指示部を有する、
ことを特徴とする請求項1乃至7のいずれか一項に記載の描画装置の検査装置。
【請求項9】
請求項1乃至8のいずれか一項に記載の描画装置の検査装置を有する、
ことを特徴とする描画装置。
【請求項10】
前記描画を行うための光の射出口の位置は固定されている、
ことを特徴とする請求項9に記載の描画装置。
【請求項11】
コンピュータを、
一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させる第1描画部、
前記描画された第1マークの位置を検出する第1検出部、
前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正する補正部、
前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させる第2描画部、
前記描画された第2マークの位置を検出する第2検出部、
前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めるずれ取得部、
として機能させるためのプログラム。
【請求項12】
コンピュータが、一方が他方を囲むような形状を有する第1マーク及び第2マークを含む描画データに基づいて、描画装置に前記第1マークを描画させることと、
コンピュータが、前記描画された第1マークの位置を検出することと、
コンピュータが、前記描画データと前記検出された第1マークの位置とに基づいて、前記描画データを補正することと、
コンピュータが、前記補正された描画データに基づいて、前記描画装置に前記第2マークを描画させることと、
コンピュータが、前記描画された第2マークの位置を検出することと、
コンピュータが、前記検出された第1マークの位置と前記検出された第2マークの位置とに基づいて、両者の位置ずれ態様を求めることと、
を含む、
ことを特徴とする描画装置の検査方法。
【請求項13】
請求項9又は10に記載の描画装置によりプリント配線板のソルダーレジストに開口部を形成することを含む、
ことを特徴とするプリント配線板の製造方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図14】
【図15】
【図16】
【図17】
【図18A】
【図18B】
【図19A】
【図19B】
【図20】
【図21A】
【図21B】
【図22】
【図23】
【図24】
【図25A】
【図25B】
【図26】
【図27】
【図28】
【図29】
【図30】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図14】
【図15】
【図16】
【図17】
【図18A】
【図18B】
【図19A】
【図19B】
【図20】
【図21A】
【図21B】
【図22】
【図23】
【図24】
【図25A】
【図25B】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2012−208237(P2012−208237A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−72728(P2011−72728)
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000000158)イビデン株式会社 (856)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000000158)イビデン株式会社 (856)
【Fターム(参考)】
[ Back to top ]