
揺動体装置、光偏向器およびそれを用いた画像形成装置
【課題】 駆動時でも可動部の平坦性を維持した揺動体装置を提供することである。
【解決手段】 本発明に係る揺動体装置は、支持部と、可動部と、可動部を支持部に対してねじり軸まわりにねじり振動可能に支持するねじりバネと、可動部を振動させる駆動手段とを有する。可動部は、単結晶シリコンで形成され、可動部の主面の結晶面は(110)面であって、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位である。
【解決手段】 本発明に係る揺動体装置は、支持部と、可動部と、可動部を支持部に対してねじり軸まわりにねじり振動可能に支持するねじりバネと、可動部を振動させる駆動手段とを有する。可動部は、単結晶シリコンで形成され、可動部の主面の結晶面は(110)面であって、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、揺動体装置、光偏向器、及びそれを用いた画像形成装置、ディスプレイなどの光学機器に関する。この光偏向器は、例えば、光の偏向走査によって画像を投影するプロジェクションディスプレイや、電子写真プロセスを有するレーザービームプリンタ、デジタル複写機等の画像形成装置に好適に利用されるものである。
【背景技術】
【0002】
従来から、光偏向器として、反射面を持つ可動部を正弦振動させて光を偏向する光走査系ないし光走査装置が種々提案されている。ここにおいて、共振現象を利用して正弦振動を行う光偏向器を使用した光走査系は、ポリゴンミラー等の回転多面鏡を使用した光走査光学系に比べて、次の様な特徴がある。すなわち、光偏向器を大幅に小型化することが可能であること、消費電力が少ないこと、特に半導体プロセスによって製造されるシリコン単結晶からなる光偏向器は理論上金属疲労が無く耐久性にも優れていること、等の特徴がある。
【0003】
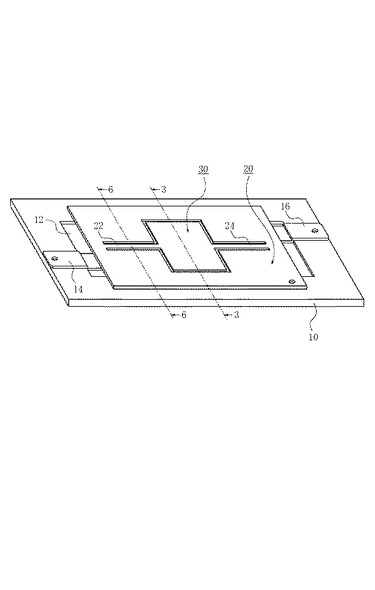
シリコンにより作製した光偏向器の一例として、図8に示すような光偏向器が存在する(特許文献1参照)。図8は、光偏向器全体の斜視図である。
【0004】
図8の光偏向器は、支持部20と可動部30と可動部30を支持部20に対してねじり振動可能に支持するねじりバネ22、24とで構成されている。そして、この光偏向器はシリコンウエハに半導体製造方法のフォトリソグラフィとエッチング技術を用いることで作製している。
【特許文献1】特開昭57−8520号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
揺動体装置の可動部は、所定角度内をねじり振動するため大きな角加速度を受ける。このため、可動部は駆動時に自重による慣性力を受け、可動部が変形する場合がある。特に、可動部の表面に反射面を形成した光偏向器を用いてレーザ光を走査する場合、この可動部の変形は走査光の光学特性に影響を与える。
【0006】
よって本発明は、揺動体装置の可動部がねじり振動する際に発生する可動部の変形を低減することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決する本発明に係る揺動体装置は、支持部と、可動部と、前記可動部を前記支持部に対してねじり軸まわりにねじり振動可能に支持するねじりバネと、前記可動部を振動させる駆動手段とを有する揺動体装置であって、前記可動部は、単結晶シリコンで形成され、前記可動部の主面の結晶面は(110)面であって、前記可動部の主面と平行で、且つ前記ねじり軸と垂直な方向の結晶方位が[111]方位であることを特徴とする。
【発明の効果】
【0008】
本発明によれは、可動部の主面の結晶面を(110)面とし、可動部の主面と平行で且つねじり軸と垂直な方向の結晶方位を[111]方位とすることで、可動部の変形量比を他の基板や他の結晶方位を用いた場合よりも小さくすることができる。したがって、可動部がねじり振動した場合でも、可動部の平坦性を維持した揺動体装置を提供することができる。
【発明を実施するための最良の形態】
【0009】
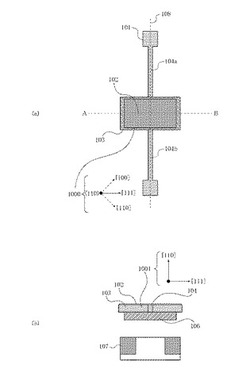
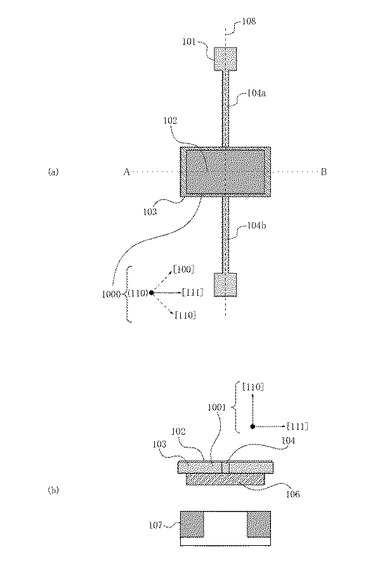
以下に、本発明の実施形態について図1を用いて説明する。図1(a)は、本発明の揺動体装置の上面図であり、図1(b)は図1(a)のA−Bにおける断面図である。本実施形態の揺動体装置は、支持部101と、可動部103と、可動部103を支持部101に対してねじり軸108のまわりにねじり振動可能に支持するねじりバネ104a、104bとを有する。支持部101は支持基板等の固定部材に固定されており、可動部103がねじり振動しても支持部101が動かないような構成となっている。また、本実施形態に係る揺動体装置は、可動部103の表面に反射面102を形成することで、光偏向器として用いることができる。反射面102は別の材質、例えば金、銅等の薄膜で形成されていてもよく、さらにその上に保護膜を有していていもよい。あるいは反射面102は誘電体多層膜により形成されてもよい。
【0010】
可動部103は単結晶シリコン基板で形成され、可動部103の主面(図1の反射面102が形成されている面)の結晶面は(110)面、あるいはその等価面(即ち、{110}面)である。また、可動部の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位、あるいは、その等価方位である。
【0011】
尚、本明細書においては、(111)面と等価な面、例えば(−1−1−1)面や(−111)面などを総称して(111)等価面(即ち{111})と表現する。また、[111]方位と等価な方位、例えば[−1−1−1]方位や[−111]方位などを総称して[111]等価方位と表現する。
【0012】
本実施形態に係る揺動体装置は、例えば、(110)面を主面とする単結晶シリコン基板を使用して、支持部101、可動部103、ねじりバネ104a、104bを一体形成している。
【0013】
図1において、可動部103の結晶方位1000は、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位である。ここで、[111]方位とは、ほぼ[100]方位の場合も含み、その範囲は[111]方位±5度の範囲内である。この範囲内では、自重による可動部の変形量がほぼ同等である。
【0014】
さらに、本実施形態の揺動体装置は、可動部103を駆動させる駆動手段を有する。駆動手段は、電磁方式の場合のコイルや磁石、静電方式の場合の電極、ピエゾ方式の場合の圧電素子などでよい。例えば、図1(b)に示す構成があり、可動部103は、硬磁性体106を有しており、ねじり軸108に対して垂直方向(図1(b)の図面左右方向)に磁化されている。硬磁性体106は、スパッタリングあるいは貼り付け等により形成することができる。そして、図示しない駆動制御手段から駆動手段としてのコイル107に駆動電流を印加することにより磁場が発生し、可動部103にトルクが印加され、揺動体装置を駆動することができる。コイル107に印加する電流を交流にすれば、交流の周波数に応じたねじり振動で揺動体装置を駆動することができる。さらに、本発明の揺動体装置が有する共振周波数と同じ交流電流をコイル107に流すことによって、低消費電力でねじり共振振動させることができる。
【0015】
次に、本発明の原理について説明する。
【0016】
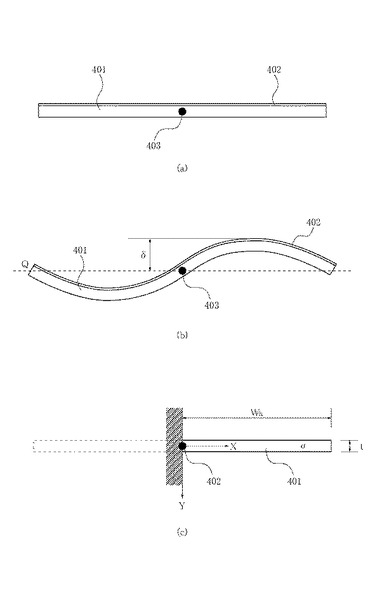
図5(a)は、可動部が平板(直方体)であった場合のねじり軸に垂直な断面図である。揺動体装置は、共振周波数付近で駆動され、ねじり振動しているとする。その場合、時間に対する可動部401の変位角は正弦波状に変化する。そして、最大の角加速度がかかる個所で最も大きな変形が生じる。
【0017】
図5(b)は変形が生じた時の可動部401を示している。図5(b)に示すように可動部401に変形が生じると、可動部401上に形成されている反射面402も同様に変形を受ける。この変形が著しい場合は、揺動体装置を光偏向器と使用した場合、反射面402の平坦度が保証されず光学特性を著しく低下させる。
【0018】
可動部401が、直方体の場合は、図5(b)に示す近似モデルによってねじり振動時の可動部401の変形を説明することができる。可動部401の変形は、ねじり軸403を中心に点対称であり、図5(c)のように中央部分を固定端支持とした梁の変形と近似することができる。可動部401にねじり振動によって角加速度Θ(2πf)2(但し、Θは変位角、fはねじり振動周波数)が付加された場合、図5(c)の梁の変形(たわみ)yは(式1)のようになる。
【0019】
【数1】

【0020】
(但し、xは図5(c)に示した無次元化距離、ρは部材の密度、Eは部材のヤング率、tは厚さ、Whはミラー幅Wの半分の値)
ここで、変形(たわみ)Yの基準平面Qからの距離δは、反射面402の光学特性の低下に影響する。今、距離δは、基準平面Qを図5(b)に示すようにとると、(式2)のように示すことができる。
【0021】
【数2】
【0022】
したがって、距離δは、変位角Θ、ミラー幅Wの5乗、周波数fの自乗に比例するため、大きな反射面開口、大偏向角、より高周波数駆動が必要な場合は、自重による可動部の変形の影響が益々顕著になる。
【0023】
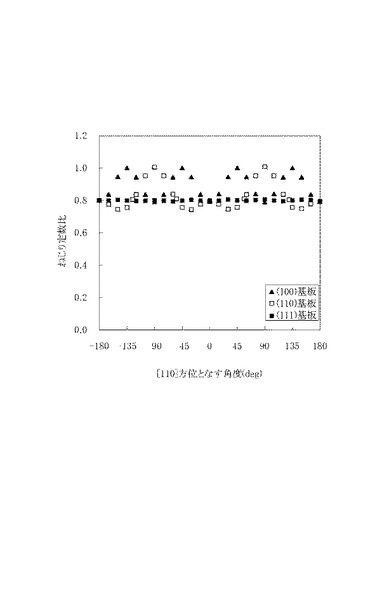
図6は、自重による可動部の変形が、各結晶方位に対してどのように変化するかを有限要素法によって計算した結果である。今回の計算では、シリコンの結晶異方性を考慮した計算を実施している。
【0024】
有限要素法の計算に用いた物性値は、以下の通りである。シリコンの密度は2300kg/m3を用いている。また、シリコン単結晶の異方性を考慮するために、ヤング率(単位:Pa)の代わりに、以下のようなスティフネス係数(単位:Pa)を用いる。
【0025】
【数3】
【0026】
ここで、C11=167.4GPa、C12=65.23GPa、C44=79.57GPaである。
【0027】
これらの物性値を用いて、可動部、ねじりバネ等の有限要素モデルを作成し、有限要素法により計算を実施することにより、結晶異方性を考慮した解析を実施することができる。
【0028】
図6の縦軸は、可動部の変形量比であり、横軸は[110]方位となす角度である。可動部の変形量比とは、可動部の主面の結晶面が(100)面であって、さらに、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[100]方位のときの変形量を1とした比である(この時、[110]方位となす角度は、例えば45度である)。
【0029】
また、[110]方位となす角度とは、可動部主面内に存在する[110]方位と、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位と、がなす角度を表す。よって、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[110]方位である場合、[110]方位となす角度は0度となる。
【0030】
ここで、(100)基板とは、可動部の主面の結晶面が(100)面であることを表す。(110)基板、(111)基板も同様である。例えば、(100)基板の場合は、[110]方位となす角度が±45度、±135度は、[100]方位を表す。また、[110]方位となす角度が0度、±90度、±180度は、[110]方位を表す。さらに、(110)基板の場合は、回転角度が0度、±180度は、[110]方位を表す。また、回転角度が±90度は、[100]方位を表し、±35.3度、±144.7度は、[111]方位を表す。さらに、(111)基板の場合は、回転角度が0度、±180度は、[110]方位を表す。
【0031】
図6に示すように、(110)基板の可動部の変形量比は、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位と、[110]方位とがなす角度が0度から60度の場合、(100)、(111)基板を使った可動部の変形量比よりも小さくなる。さらに、最も小さい変形量を示すのは、(110)基板を使った可動部であり、かつ、[110]方位となす角度が35.3度の時である。この角度は、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位の場合である。また、[111]方位±5度の範囲内である場合、自重による可動部の変形量が同等である。
【0032】
以上のように、本実施形態の揺動体装置では、シリコン基板の結晶異方性を利用して、反射面を有する可動部を作製することによって、高速駆動時の可動部の変形を小さくすることができる。従って、本実施形態の揺動体装置を用いて光偏向器を作製した場合、高速駆動時における偏向光(反射光)のスポット形状の劣化を防止することができる。
【0033】
次に、本実施形態の揺動体装置のねじりバネについて説明する。
【0034】
本実施形態の揺動体装置のねじりバネは、単結晶シリコンで形成され、ねじり軸に平行な方向の結晶方位が[111]方位である。ここで、結晶方位が[111]方位とは、その等価方位も含む。
【0035】
このねじりバネを用いた場合の作用について説明する。図7は、ねじりバネ定数比が各結晶面に対してどのように変化するかを有限要素法によって計算した結果である。今回の計算では、シリコンの結晶異方性を考慮した計算を実施している。尚、図7の有限要素法の計算に用いた物性値は、図6の計算で用いた物性値と同様である。
【0036】
図7の縦軸は、ねじりバネ定数比であり、横軸は[110]方位となす角度である。ねじりバネ定数比とは、(100)基板を用いてねじりバネを作製し、ねじり軸に平行な方向の結晶方位が[100]方位のとき(図7の(100)基板において、[110]方位となす角度が45度の場合)のねじりバネ定数を1とした比である。
【0037】
また、[110]方位となす角度とは、ねじりバネのねじり軸方向の結晶方位が、[110]方位となす角度を表す。つまり、0度は、ねじりバネのねじり軸方向の結晶方位が[110]方位であることを表す。また、ねじりバネのねじり軸に垂直な断面形状は直方体である。
【0038】
図7が示すように、(110)基板を使ったねじりバネ定数は、ねじりバネのねじり軸方向の結晶方位が、[110]方位となす角度が0度から60度の間で、(100)、(110)基板を使ったねじりバネの最も小さいねじりバネ定数より小さい。さらに、最も小さいねじりバネ定数比を示すのは、(110)基板を使ったねじりバネであり、かつ、ねじりバネのねじり軸方向の結晶方位が、[111]方位の時である(この時、[110]方位となす角度は、35.3度である)。ここで、[111]方位は、ほぼ[111]方位である場合を含み、その範囲は[111]方位±10度の範囲内である。この範囲では、ばね定数比が同等である。また、この結晶方位は、その等価方位であってもかまわない。
【0039】
ねじりバネ定数比が小さい結晶面を利用して作製したねじりバネと、ねじりバネ定数比が大きい結晶面で作製したねじりバネとを比較すると次のようになる。同じねじりバネ定数のねじりバネを作製する場合、ねじりバネ定数比が大きい結晶面でねじりバネを作製する場合と比べて、ねじりバネ定数比が小さい結晶面、結晶方位でねじりバネを作製したほうが、ねじりバネの形状を大きくすることができる。例えば、ねじりバネの長さが一定の場合、ねじりバネ定数比が小さいほうがねじりバネの幅を太くすることができる。単結晶シリコン基板の加工誤差が同じである場合、ねじりバネの形状が太いほうがねじりバネ定数への加工誤差の影響を小さくすることができる。よって、ねじりバネ定数比が小さい結晶面、結晶方位で作製したねじりバネのほうが、単結晶シリコン基板の加工誤差の影響を低減することができる。
【0040】
この構成により、ねじりバネの幅などの加工誤差によるねじりバネ定数のばらつきを低減することができる。従って、高速駆動時の可動部の変形量を低減すると同時に、加工誤差による共振周波数のばらつきを低減することができる。
【0041】
また、ねじりバネを(111)面を主面とするシリコン基板で作製することもできる。図7に示すように、(111)面を主面とするシリコン基板で作製したねじりバネは、[110]方位となす角度によらず、バネ定数がほぼ一定である。従って、ねじりバネを作製する際に、ねじりバネのねじり軸方向の結晶方位がずれてしまっても、ねじりバネ定数は、ほぼ一定にすることができるので、加工誤差による共振周波数のばらつきを低減することができる。
【0042】
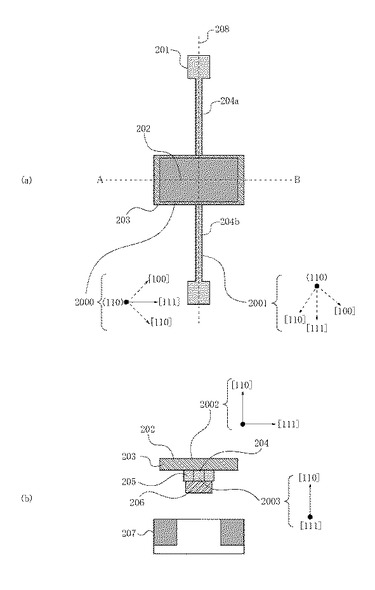
また、本実施形態の揺動体装置は、図2に示すように可動部203を、支持部201及びねじりバネ204a、204bと別に作製することもできる。この場合、それぞれの部材を形成後、可動部203を固定部205に接着、又は接合する。
【0043】
さらに、本実施形態の揺動体装置は、複数の可動部と、複数の可動部を同一のねじり軸まわりにねじり振動可能に連結する複数のねじりバネとで構成することができる。複数の可動部の少なくとも一つは反射面を有し、ねじり軸まわりに基準周波数となる固有周波数と前記基準周波数の整数倍の固有周波数とを有する構成とすることもできる。2つ以上のねじり振動方向の固有振動モードを同時に励起させて、正弦波状の光走査以外の光走査を行うことができる。
【0044】
さらに、光源と、光偏向器と、感光体とを有し、この光偏向器は、光源からの光を光偏向器により偏向し、光の少なくとも一部を前記感光体に照射して静電潜像を形成する画像形成装置とすることもできる。高速駆動時の可動部の変形量が小さい光偏向器を利用した構成では、反射光のスポット形状が劣化しないので、画質の低下を防止することができる。
【0045】
次に本実施形態に係る揺動体装置の製造方法に関して説明する。
【0046】
支持部と可動部とねじりバネとを単結晶シリコンで一体形成する場合は、例えば以下のようにして作製する。(110)面を主面とする単結晶シリコン基板に、フォトリソグラフィ技術を用いて、支持部、可動部、ねじりバネとなる部分をパターニングする。この時、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位となるようにする。次に、ウエットエッチングやドライエッチング技術を用いて、パターニングした部分以外を除去する。この様に加工精度の高い半導体プロセス技術で一括加工することで、より高精度に揺動体装置を作製することができる。
【0047】
次に、可動部を支持部及びねじりバネと別に作製する方法について説明する。
【0048】
可動部は、(110)面を主面とするシリコン基板で作製する。作製方法は、ウエットエッチング、ドライエッチングにより作製しても良いし、ダイシングブレード(円形回転刃)によって切断しても良い。この可動部は、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位となるように可動部とねじりバネを一体化する。一体化は、接着、あるいは、接合等でよい。このように一体化することによって、高速駆動時の可動部の変形が小さい光偏向器を作製することができる。
【0049】
また、可動部、ねじりバネ等の光偏向器を構成する部材を個別にマイクロマシニング技術によりシリコンウエハ上に形成することにより、ウエハ内の不要な部分を低減することができ、取り個数を増やすことができる。従って、安価な光偏向器を提供することができる。さらに、(110)基板で可動部を作製し、ねじりバネ等の光偏向器を構成する部材を個別に作製することによって、ねじりバネ等の材料を任意の材料で作製することができる。例えば、共振周波数を低減するための柔らかいバネや共振周波数を上げるための硬いばねにすることができる。従って、共振周波数の高い光偏向器や、共振周波数の低い光偏向器を提供することができる。特に、ねじりバネがシリコンであっても、任意の方向の結晶方位のねじりバネを有する光偏向器を提供することができる。
【0050】
さらに、ねじりバネは、(110)面を主面とするシリコン基板を用いて、ねじり軸に平行方向の結晶方位が、[111]方位であるように作製する。作製された可動部とねじりバネは、接合や接着などにより一体化することができる。この作製方法によって、ねじりバネの幅などの加工誤差によるねじりバネ定数のばらつきを低減することができる。従って、加工誤差によるねじりバネの不良品率を低下することができるので、コスト低減につながる。
【0051】
さらに、ねじりバネが(111)面を主面とするシリコン基板で作製する作製方法とすることもできる。この作製方法によって、作製する際の結晶方位ずれによるバネ定数のばらつきを低減することができる。従って、加工誤差によるねじりバネの不良品率を低下することができるので、コスト低減につながる。
【0052】
以下、より具体的な実施例を挙げて本発明を詳細に説明する。
【実施例1】
【0053】
実施例1の光偏向器の構成を図1を用いて説明する。図1(a)は、本発明の光偏向器の上面図であり、図1(b)は図1(a)のA−Bにおける断面図である。本発明の光偏向器は、支持部101と、反射面102を有する可動部103と、可動部103を支持部101に対してねじり軸108まわりにねじり振動可能に支持するねじりバネ104a、104bと、を有する。可動部103は(110)面を主面(図1の反射面102が形成されている面)とするシリコン基板で作製され、さらに、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位となるような構成としている。
【0054】
つまり、可動部103の結晶方位1000は、可動部103主面の結晶面が(110)面であり、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位であることを示している。
【0055】
可動部103は、ねじり軸108に垂直方向の長さが3.0mm、平行方向の長さが1.0mm、厚さは0.3mmである。可動部の形状は、直方体であるが、楕円柱状等であっても構わない。反射面102の材料はアルミニウムであり、真空蒸着により形成されている。支持部101、可動部103、ねじりバネ104a、104bは、(110)面を主面とする単結晶シリコン基板に、半導体製造方法のフォトリソグラフィとドライエッチング技術を用いることで作製されている。このとき可動部の結晶方位は、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位となるようにする。
【0056】
可動部103は、硬磁性体106を有しており、ねじり軸108に対して垂直方向(図1(b)の図面左右方向)に磁化されている。本実施例の光偏向器が有する共振周波数は約2000Hzであり、この共振周波数と同じ交流電流をコイル107に流すことによって磁場が発生し、可動部103にトルクが印加され、低消費電力で光学角100度のねじり振動をさせることができる。
【0057】
この構成による可動部103の最大変形量は約40nmであり、本発明を適用しない場合と比べて変形量を小さくすることができる。よって、反射光のスポット形状の劣化を低減することができる。
【実施例2】
【0058】
実施例2の光偏向器の構成を図2を用いて説明する。図2(a)は、本発明の光偏向器の上面図であり、図2(b)は図2(a)のA−Bにおける断面図である。実施例2の光偏向器の構成は、実施例1の光偏向器と略同様である。本実施例では、ねじりバネ204a、204bは、(110)面を主面とするシリコン基板を用いて作製している。ねじりバネ204a、204bの結晶面2001は、ねじり軸208に平行方向の結晶方位が、[111]方位である。[111]方位を有するねじりバネは、(110)基板を用いて作製することができる。バネ形状は、ねじり軸208に対して垂直な断面が直方体である。
【0059】
可動部203は、(110)面を主面とするシリコン基板に、半導体製造方法のフォトリソグラフィとドライエッチング技術を適用して作製されている。可動部とねじりバネは、図2(b)に示すように接合により一体化されている。接合する際は、可動部の結晶方位は、可動部203の主面と平行で、且つ、ねじり軸208と垂直な方向の結晶方位が[111]方位となるようにする。
【0060】
可動部、ねじりバネ等の部材を、シリコンウエハを用いてそれぞれ個別に形成することにより、ウエハ内の不要な部分を低減することができ、取り個数を増やすことができる。従って、コスト低減を行うことができる。
【0061】
図7に示すように、最も小さいねじりバネ定数を示すのは、(110)面を主面とするシリコン基板を使ったねじりバネであり、かつ、ねじり軸208に平行方向の結晶方位が、[111]方位の時である。
【0062】
従って,この構成により、ねじりバネ204a、204bの幅の加工誤差が1μm程度あっても、ねじりバネ定数のばらつきを低減することができ、加工誤差による共振周波数のばらつきを低減することができる。また、可動部の結晶方位を上記の様にすることで、高速駆動時の可動部の変形量を低減することができる。
【実施例3】
【0063】
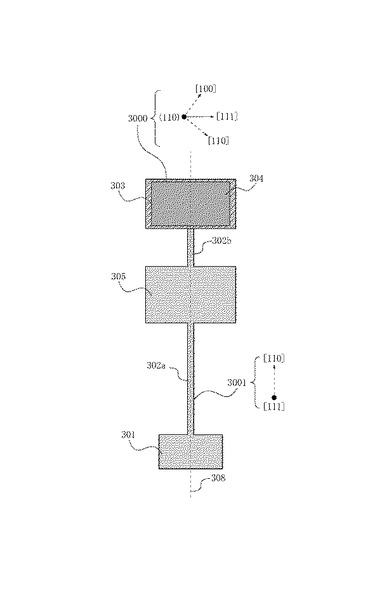
本実施例の光偏向器の構成を図3を用いて説明する。本実施例の光偏向器は、2つの可動部303と305を有し、可動部303は反射面304を有する。可動部303と可動部305は、複数のねじりバネ302a、302bにより、支持部301に対して同一のねじり軸まわりにねじり振動可能に支持されている。
【0064】
可動部303は、ねじり軸308に垂直方向の長さが3.0mm、平行方向のサイズが1.0mm、厚さが0.3mmであり、可動部305は、ねじり軸308に垂直方向の長さが3.0mm、平行方向のサイズが1.0mm、厚さが0.3mmである。可動部305は図示しない永久磁石を有し、実施例1と同様に電磁力によって駆動することができる。
【0065】
ねじりバネ302a、302bは、(111)面を主面とするシリコン基板により作製されている。図7が示すように、(111)面を主面とするシリコン基板で作製したねじりバネは、結晶方位によらずバネ定数がほぼ一定である。従って、ねじりバネを作製する際に、ねじりバネのねじり軸方向の結晶方位がずれてしまっても、ねじりバネ定数は、ほぼ一定にすることができるので、加工誤差による共振周波数のばらつきを低減することができる。
【0066】
本実施例の光偏向器は、ねじり軸308を中心としたねじり振動について、周波数f1の1次の固有振動モードと基準周波数の略2倍の周波数となるf2の2次の固有振動モードを有している。1次のねじり振動モードに加えて、2次のねじり振動モードで同時にねじり振動させることによって、可動部303に形成された反射面304で反射された光の偏向走査の変位角は、この2つの振動モードの重ね合わせとなる。本実施例の光偏向器は、基準周波数となる1次のねじり振動モードと基準周波数の略2倍の周波数となる2次のねじり振動モードを有しているので、鋸波状の振動で光偏向器を駆動することができる。従って、角速度の変動が少ない光走査を行うことができるので、より一層、反射光のスポット形状を均一にすることが可能となる。
【実施例4】
【0067】
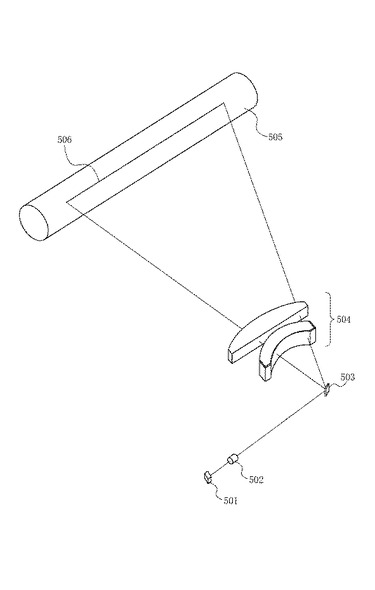
図5は上記光偏向器を用いた光学機器の実施例を示す図である。図5は、光学機器の一つである画像形成装置を示している。図5において、503は本発明の光偏向器であり、本実施例では入射光を1次元に走査する。501はレーザ光源である。502はレンズあるいはレンズ群であり、504は書き込みレンズ或いはレンズ群、505は感光体、506は走査軌跡である。レーザ光源501から射出されたレーザ光は、光の偏向走査のタイミングと関係した所定の強度変調を受けて、光偏向器503により1次元的に走査する。この走査されたレーザ光は書き込みレンズ504により、感光体505上へ画像を形成する。感光体505は図示しない帯電器により一様に帯電されており、この上に光を走査することによりその部分に静電潜像を形成する。次に、図示しない現像器により静電潜像の画像部分にトナー像を形成し、これを例えば図示しない用紙に転写・定着することで用紙上に画像が形成される。反射面の平坦性が高く、加工誤差による周波数変動を低減した光偏向器を用いることにより、安定した画像を形成することができる。
【0068】
また、本発明に係る光偏向器をプロジェクションディスプレイなどの画像表示装置に用いる場合は、以下のような構成とする。画像データに基づいて変調された光ビームを発生する光源からの光ビームを、本発明に係る光偏向器で偏向し、該光ビームを被照射体に照射することで画像を形成する。光偏向器は、光ビームを被照射体上の主走査方向と副走査方向に偏向できるような構成とする。
【0069】
上記の様に、本発明に係る光偏向器はこのような光学機器にも適用することができる。
【産業上の利用可能性】
【0070】
本発明は、揺動体装置、光偏向器及びそれを用いた画像形成装置に関する。例えば、光の偏向走査によって画像を投影するプロジェクションディスプレイや、電子写真プロセスを有するレーザービームプリンタ、デジタル複写機等の画像形成装置に好適なものである。
【図面の簡単な説明】
【0071】
【図1】(a)本発明の実施形態の揺動体装置及び実施例1の光偏向器を説明するための上面図である。(b)本発明の実施形態の揺動体装置及び実施例1の光偏向器を説明するための断面図である。
【図2】(a)本発明の実施例2の光偏向器を説明するための上面図である。(b)本発明の実施例2の光偏向器を説明するための断面図である。
【図3】本発明の実施例3の光偏向器を説明するための上面図である。
【図4】本発明の実施例4の画像形成装置を説明するための図である。
【図5】(a)、(b)、(c)光偏向器の変形を説明するための図である。
【図6】本発明の可動部の変形量の結晶面依存性を示す図である。
【図7】本発明のねじりバネのばね定数の結晶面依存性を示す図である。
【図8】従来技術を示す斜視図である。
【符号の説明】
【0072】
20 支持部
22、24 ねじりバネ
30 可動部
101、201、301 支持部
102、202、304 反射面
103、203、303、305 可動部
104a、104b、204a、204b、302a、302b ねじりバネ
105、205 固定部
106、206 永久磁石
107、207、コイル
108、208、308 ねじり軸
1000、1001、2000、2001、2002、2003、3000、3001 結晶方位
501 レーザ光源
502 レンズ
503 光走査系
504 書き込みレンズ
505 感光体
506 走査軌跡
【技術分野】
【0001】
本発明は、揺動体装置、光偏向器、及びそれを用いた画像形成装置、ディスプレイなどの光学機器に関する。この光偏向器は、例えば、光の偏向走査によって画像を投影するプロジェクションディスプレイや、電子写真プロセスを有するレーザービームプリンタ、デジタル複写機等の画像形成装置に好適に利用されるものである。
【背景技術】
【0002】
従来から、光偏向器として、反射面を持つ可動部を正弦振動させて光を偏向する光走査系ないし光走査装置が種々提案されている。ここにおいて、共振現象を利用して正弦振動を行う光偏向器を使用した光走査系は、ポリゴンミラー等の回転多面鏡を使用した光走査光学系に比べて、次の様な特徴がある。すなわち、光偏向器を大幅に小型化することが可能であること、消費電力が少ないこと、特に半導体プロセスによって製造されるシリコン単結晶からなる光偏向器は理論上金属疲労が無く耐久性にも優れていること、等の特徴がある。
【0003】
シリコンにより作製した光偏向器の一例として、図8に示すような光偏向器が存在する(特許文献1参照)。図8は、光偏向器全体の斜視図である。
【0004】
図8の光偏向器は、支持部20と可動部30と可動部30を支持部20に対してねじり振動可能に支持するねじりバネ22、24とで構成されている。そして、この光偏向器はシリコンウエハに半導体製造方法のフォトリソグラフィとエッチング技術を用いることで作製している。
【特許文献1】特開昭57−8520号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
揺動体装置の可動部は、所定角度内をねじり振動するため大きな角加速度を受ける。このため、可動部は駆動時に自重による慣性力を受け、可動部が変形する場合がある。特に、可動部の表面に反射面を形成した光偏向器を用いてレーザ光を走査する場合、この可動部の変形は走査光の光学特性に影響を与える。
【0006】
よって本発明は、揺動体装置の可動部がねじり振動する際に発生する可動部の変形を低減することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決する本発明に係る揺動体装置は、支持部と、可動部と、前記可動部を前記支持部に対してねじり軸まわりにねじり振動可能に支持するねじりバネと、前記可動部を振動させる駆動手段とを有する揺動体装置であって、前記可動部は、単結晶シリコンで形成され、前記可動部の主面の結晶面は(110)面であって、前記可動部の主面と平行で、且つ前記ねじり軸と垂直な方向の結晶方位が[111]方位であることを特徴とする。
【発明の効果】
【0008】
本発明によれは、可動部の主面の結晶面を(110)面とし、可動部の主面と平行で且つねじり軸と垂直な方向の結晶方位を[111]方位とすることで、可動部の変形量比を他の基板や他の結晶方位を用いた場合よりも小さくすることができる。したがって、可動部がねじり振動した場合でも、可動部の平坦性を維持した揺動体装置を提供することができる。
【発明を実施するための最良の形態】
【0009】
以下に、本発明の実施形態について図1を用いて説明する。図1(a)は、本発明の揺動体装置の上面図であり、図1(b)は図1(a)のA−Bにおける断面図である。本実施形態の揺動体装置は、支持部101と、可動部103と、可動部103を支持部101に対してねじり軸108のまわりにねじり振動可能に支持するねじりバネ104a、104bとを有する。支持部101は支持基板等の固定部材に固定されており、可動部103がねじり振動しても支持部101が動かないような構成となっている。また、本実施形態に係る揺動体装置は、可動部103の表面に反射面102を形成することで、光偏向器として用いることができる。反射面102は別の材質、例えば金、銅等の薄膜で形成されていてもよく、さらにその上に保護膜を有していていもよい。あるいは反射面102は誘電体多層膜により形成されてもよい。
【0010】
可動部103は単結晶シリコン基板で形成され、可動部103の主面(図1の反射面102が形成されている面)の結晶面は(110)面、あるいはその等価面(即ち、{110}面)である。また、可動部の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位、あるいは、その等価方位である。
【0011】
尚、本明細書においては、(111)面と等価な面、例えば(−1−1−1)面や(−111)面などを総称して(111)等価面(即ち{111})と表現する。また、[111]方位と等価な方位、例えば[−1−1−1]方位や[−111]方位などを総称して[111]等価方位と表現する。
【0012】
本実施形態に係る揺動体装置は、例えば、(110)面を主面とする単結晶シリコン基板を使用して、支持部101、可動部103、ねじりバネ104a、104bを一体形成している。
【0013】
図1において、可動部103の結晶方位1000は、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位である。ここで、[111]方位とは、ほぼ[100]方位の場合も含み、その範囲は[111]方位±5度の範囲内である。この範囲内では、自重による可動部の変形量がほぼ同等である。
【0014】
さらに、本実施形態の揺動体装置は、可動部103を駆動させる駆動手段を有する。駆動手段は、電磁方式の場合のコイルや磁石、静電方式の場合の電極、ピエゾ方式の場合の圧電素子などでよい。例えば、図1(b)に示す構成があり、可動部103は、硬磁性体106を有しており、ねじり軸108に対して垂直方向(図1(b)の図面左右方向)に磁化されている。硬磁性体106は、スパッタリングあるいは貼り付け等により形成することができる。そして、図示しない駆動制御手段から駆動手段としてのコイル107に駆動電流を印加することにより磁場が発生し、可動部103にトルクが印加され、揺動体装置を駆動することができる。コイル107に印加する電流を交流にすれば、交流の周波数に応じたねじり振動で揺動体装置を駆動することができる。さらに、本発明の揺動体装置が有する共振周波数と同じ交流電流をコイル107に流すことによって、低消費電力でねじり共振振動させることができる。
【0015】
次に、本発明の原理について説明する。
【0016】
図5(a)は、可動部が平板(直方体)であった場合のねじり軸に垂直な断面図である。揺動体装置は、共振周波数付近で駆動され、ねじり振動しているとする。その場合、時間に対する可動部401の変位角は正弦波状に変化する。そして、最大の角加速度がかかる個所で最も大きな変形が生じる。
【0017】
図5(b)は変形が生じた時の可動部401を示している。図5(b)に示すように可動部401に変形が生じると、可動部401上に形成されている反射面402も同様に変形を受ける。この変形が著しい場合は、揺動体装置を光偏向器と使用した場合、反射面402の平坦度が保証されず光学特性を著しく低下させる。
【0018】
可動部401が、直方体の場合は、図5(b)に示す近似モデルによってねじり振動時の可動部401の変形を説明することができる。可動部401の変形は、ねじり軸403を中心に点対称であり、図5(c)のように中央部分を固定端支持とした梁の変形と近似することができる。可動部401にねじり振動によって角加速度Θ(2πf)2(但し、Θは変位角、fはねじり振動周波数)が付加された場合、図5(c)の梁の変形(たわみ)yは(式1)のようになる。
【0019】
【数1】
【0020】
(但し、xは図5(c)に示した無次元化距離、ρは部材の密度、Eは部材のヤング率、tは厚さ、Whはミラー幅Wの半分の値)
ここで、変形(たわみ)Yの基準平面Qからの距離δは、反射面402の光学特性の低下に影響する。今、距離δは、基準平面Qを図5(b)に示すようにとると、(式2)のように示すことができる。
【0021】
【数2】
【0022】
したがって、距離δは、変位角Θ、ミラー幅Wの5乗、周波数fの自乗に比例するため、大きな反射面開口、大偏向角、より高周波数駆動が必要な場合は、自重による可動部の変形の影響が益々顕著になる。
【0023】
図6は、自重による可動部の変形が、各結晶方位に対してどのように変化するかを有限要素法によって計算した結果である。今回の計算では、シリコンの結晶異方性を考慮した計算を実施している。
【0024】
有限要素法の計算に用いた物性値は、以下の通りである。シリコンの密度は2300kg/m3を用いている。また、シリコン単結晶の異方性を考慮するために、ヤング率(単位:Pa)の代わりに、以下のようなスティフネス係数(単位:Pa)を用いる。
【0025】
【数3】
【0026】
ここで、C11=167.4GPa、C12=65.23GPa、C44=79.57GPaである。
【0027】
これらの物性値を用いて、可動部、ねじりバネ等の有限要素モデルを作成し、有限要素法により計算を実施することにより、結晶異方性を考慮した解析を実施することができる。
【0028】
図6の縦軸は、可動部の変形量比であり、横軸は[110]方位となす角度である。可動部の変形量比とは、可動部の主面の結晶面が(100)面であって、さらに、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[100]方位のときの変形量を1とした比である(この時、[110]方位となす角度は、例えば45度である)。
【0029】
また、[110]方位となす角度とは、可動部主面内に存在する[110]方位と、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位と、がなす角度を表す。よって、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[110]方位である場合、[110]方位となす角度は0度となる。
【0030】
ここで、(100)基板とは、可動部の主面の結晶面が(100)面であることを表す。(110)基板、(111)基板も同様である。例えば、(100)基板の場合は、[110]方位となす角度が±45度、±135度は、[100]方位を表す。また、[110]方位となす角度が0度、±90度、±180度は、[110]方位を表す。さらに、(110)基板の場合は、回転角度が0度、±180度は、[110]方位を表す。また、回転角度が±90度は、[100]方位を表し、±35.3度、±144.7度は、[111]方位を表す。さらに、(111)基板の場合は、回転角度が0度、±180度は、[110]方位を表す。
【0031】
図6に示すように、(110)基板の可動部の変形量比は、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位と、[110]方位とがなす角度が0度から60度の場合、(100)、(111)基板を使った可動部の変形量比よりも小さくなる。さらに、最も小さい変形量を示すのは、(110)基板を使った可動部であり、かつ、[110]方位となす角度が35.3度の時である。この角度は、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位の場合である。また、[111]方位±5度の範囲内である場合、自重による可動部の変形量が同等である。
【0032】
以上のように、本実施形態の揺動体装置では、シリコン基板の結晶異方性を利用して、反射面を有する可動部を作製することによって、高速駆動時の可動部の変形を小さくすることができる。従って、本実施形態の揺動体装置を用いて光偏向器を作製した場合、高速駆動時における偏向光(反射光)のスポット形状の劣化を防止することができる。
【0033】
次に、本実施形態の揺動体装置のねじりバネについて説明する。
【0034】
本実施形態の揺動体装置のねじりバネは、単結晶シリコンで形成され、ねじり軸に平行な方向の結晶方位が[111]方位である。ここで、結晶方位が[111]方位とは、その等価方位も含む。
【0035】
このねじりバネを用いた場合の作用について説明する。図7は、ねじりバネ定数比が各結晶面に対してどのように変化するかを有限要素法によって計算した結果である。今回の計算では、シリコンの結晶異方性を考慮した計算を実施している。尚、図7の有限要素法の計算に用いた物性値は、図6の計算で用いた物性値と同様である。
【0036】
図7の縦軸は、ねじりバネ定数比であり、横軸は[110]方位となす角度である。ねじりバネ定数比とは、(100)基板を用いてねじりバネを作製し、ねじり軸に平行な方向の結晶方位が[100]方位のとき(図7の(100)基板において、[110]方位となす角度が45度の場合)のねじりバネ定数を1とした比である。
【0037】
また、[110]方位となす角度とは、ねじりバネのねじり軸方向の結晶方位が、[110]方位となす角度を表す。つまり、0度は、ねじりバネのねじり軸方向の結晶方位が[110]方位であることを表す。また、ねじりバネのねじり軸に垂直な断面形状は直方体である。
【0038】
図7が示すように、(110)基板を使ったねじりバネ定数は、ねじりバネのねじり軸方向の結晶方位が、[110]方位となす角度が0度から60度の間で、(100)、(110)基板を使ったねじりバネの最も小さいねじりバネ定数より小さい。さらに、最も小さいねじりバネ定数比を示すのは、(110)基板を使ったねじりバネであり、かつ、ねじりバネのねじり軸方向の結晶方位が、[111]方位の時である(この時、[110]方位となす角度は、35.3度である)。ここで、[111]方位は、ほぼ[111]方位である場合を含み、その範囲は[111]方位±10度の範囲内である。この範囲では、ばね定数比が同等である。また、この結晶方位は、その等価方位であってもかまわない。
【0039】
ねじりバネ定数比が小さい結晶面を利用して作製したねじりバネと、ねじりバネ定数比が大きい結晶面で作製したねじりバネとを比較すると次のようになる。同じねじりバネ定数のねじりバネを作製する場合、ねじりバネ定数比が大きい結晶面でねじりバネを作製する場合と比べて、ねじりバネ定数比が小さい結晶面、結晶方位でねじりバネを作製したほうが、ねじりバネの形状を大きくすることができる。例えば、ねじりバネの長さが一定の場合、ねじりバネ定数比が小さいほうがねじりバネの幅を太くすることができる。単結晶シリコン基板の加工誤差が同じである場合、ねじりバネの形状が太いほうがねじりバネ定数への加工誤差の影響を小さくすることができる。よって、ねじりバネ定数比が小さい結晶面、結晶方位で作製したねじりバネのほうが、単結晶シリコン基板の加工誤差の影響を低減することができる。
【0040】
この構成により、ねじりバネの幅などの加工誤差によるねじりバネ定数のばらつきを低減することができる。従って、高速駆動時の可動部の変形量を低減すると同時に、加工誤差による共振周波数のばらつきを低減することができる。
【0041】
また、ねじりバネを(111)面を主面とするシリコン基板で作製することもできる。図7に示すように、(111)面を主面とするシリコン基板で作製したねじりバネは、[110]方位となす角度によらず、バネ定数がほぼ一定である。従って、ねじりバネを作製する際に、ねじりバネのねじり軸方向の結晶方位がずれてしまっても、ねじりバネ定数は、ほぼ一定にすることができるので、加工誤差による共振周波数のばらつきを低減することができる。
【0042】
また、本実施形態の揺動体装置は、図2に示すように可動部203を、支持部201及びねじりバネ204a、204bと別に作製することもできる。この場合、それぞれの部材を形成後、可動部203を固定部205に接着、又は接合する。
【0043】
さらに、本実施形態の揺動体装置は、複数の可動部と、複数の可動部を同一のねじり軸まわりにねじり振動可能に連結する複数のねじりバネとで構成することができる。複数の可動部の少なくとも一つは反射面を有し、ねじり軸まわりに基準周波数となる固有周波数と前記基準周波数の整数倍の固有周波数とを有する構成とすることもできる。2つ以上のねじり振動方向の固有振動モードを同時に励起させて、正弦波状の光走査以外の光走査を行うことができる。
【0044】
さらに、光源と、光偏向器と、感光体とを有し、この光偏向器は、光源からの光を光偏向器により偏向し、光の少なくとも一部を前記感光体に照射して静電潜像を形成する画像形成装置とすることもできる。高速駆動時の可動部の変形量が小さい光偏向器を利用した構成では、反射光のスポット形状が劣化しないので、画質の低下を防止することができる。
【0045】
次に本実施形態に係る揺動体装置の製造方法に関して説明する。
【0046】
支持部と可動部とねじりバネとを単結晶シリコンで一体形成する場合は、例えば以下のようにして作製する。(110)面を主面とする単結晶シリコン基板に、フォトリソグラフィ技術を用いて、支持部、可動部、ねじりバネとなる部分をパターニングする。この時、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位となるようにする。次に、ウエットエッチングやドライエッチング技術を用いて、パターニングした部分以外を除去する。この様に加工精度の高い半導体プロセス技術で一括加工することで、より高精度に揺動体装置を作製することができる。
【0047】
次に、可動部を支持部及びねじりバネと別に作製する方法について説明する。
【0048】
可動部は、(110)面を主面とするシリコン基板で作製する。作製方法は、ウエットエッチング、ドライエッチングにより作製しても良いし、ダイシングブレード(円形回転刃)によって切断しても良い。この可動部は、可動部の主面と平行で、且つねじり軸と垂直な方向の結晶方位が[111]方位となるように可動部とねじりバネを一体化する。一体化は、接着、あるいは、接合等でよい。このように一体化することによって、高速駆動時の可動部の変形が小さい光偏向器を作製することができる。
【0049】
また、可動部、ねじりバネ等の光偏向器を構成する部材を個別にマイクロマシニング技術によりシリコンウエハ上に形成することにより、ウエハ内の不要な部分を低減することができ、取り個数を増やすことができる。従って、安価な光偏向器を提供することができる。さらに、(110)基板で可動部を作製し、ねじりバネ等の光偏向器を構成する部材を個別に作製することによって、ねじりバネ等の材料を任意の材料で作製することができる。例えば、共振周波数を低減するための柔らかいバネや共振周波数を上げるための硬いばねにすることができる。従って、共振周波数の高い光偏向器や、共振周波数の低い光偏向器を提供することができる。特に、ねじりバネがシリコンであっても、任意の方向の結晶方位のねじりバネを有する光偏向器を提供することができる。
【0050】
さらに、ねじりバネは、(110)面を主面とするシリコン基板を用いて、ねじり軸に平行方向の結晶方位が、[111]方位であるように作製する。作製された可動部とねじりバネは、接合や接着などにより一体化することができる。この作製方法によって、ねじりバネの幅などの加工誤差によるねじりバネ定数のばらつきを低減することができる。従って、加工誤差によるねじりバネの不良品率を低下することができるので、コスト低減につながる。
【0051】
さらに、ねじりバネが(111)面を主面とするシリコン基板で作製する作製方法とすることもできる。この作製方法によって、作製する際の結晶方位ずれによるバネ定数のばらつきを低減することができる。従って、加工誤差によるねじりバネの不良品率を低下することができるので、コスト低減につながる。
【0052】
以下、より具体的な実施例を挙げて本発明を詳細に説明する。
【実施例1】
【0053】
実施例1の光偏向器の構成を図1を用いて説明する。図1(a)は、本発明の光偏向器の上面図であり、図1(b)は図1(a)のA−Bにおける断面図である。本発明の光偏向器は、支持部101と、反射面102を有する可動部103と、可動部103を支持部101に対してねじり軸108まわりにねじり振動可能に支持するねじりバネ104a、104bと、を有する。可動部103は(110)面を主面(図1の反射面102が形成されている面)とするシリコン基板で作製され、さらに、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位となるような構成としている。
【0054】
つまり、可動部103の結晶方位1000は、可動部103主面の結晶面が(110)面であり、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位であることを示している。
【0055】
可動部103は、ねじり軸108に垂直方向の長さが3.0mm、平行方向の長さが1.0mm、厚さは0.3mmである。可動部の形状は、直方体であるが、楕円柱状等であっても構わない。反射面102の材料はアルミニウムであり、真空蒸着により形成されている。支持部101、可動部103、ねじりバネ104a、104bは、(110)面を主面とする単結晶シリコン基板に、半導体製造方法のフォトリソグラフィとドライエッチング技術を用いることで作製されている。このとき可動部の結晶方位は、可動部103の主面と平行で、且つ、ねじり軸108と垂直な方向の結晶方位が[111]方位となるようにする。
【0056】
可動部103は、硬磁性体106を有しており、ねじり軸108に対して垂直方向(図1(b)の図面左右方向)に磁化されている。本実施例の光偏向器が有する共振周波数は約2000Hzであり、この共振周波数と同じ交流電流をコイル107に流すことによって磁場が発生し、可動部103にトルクが印加され、低消費電力で光学角100度のねじり振動をさせることができる。
【0057】
この構成による可動部103の最大変形量は約40nmであり、本発明を適用しない場合と比べて変形量を小さくすることができる。よって、反射光のスポット形状の劣化を低減することができる。
【実施例2】
【0058】
実施例2の光偏向器の構成を図2を用いて説明する。図2(a)は、本発明の光偏向器の上面図であり、図2(b)は図2(a)のA−Bにおける断面図である。実施例2の光偏向器の構成は、実施例1の光偏向器と略同様である。本実施例では、ねじりバネ204a、204bは、(110)面を主面とするシリコン基板を用いて作製している。ねじりバネ204a、204bの結晶面2001は、ねじり軸208に平行方向の結晶方位が、[111]方位である。[111]方位を有するねじりバネは、(110)基板を用いて作製することができる。バネ形状は、ねじり軸208に対して垂直な断面が直方体である。
【0059】
可動部203は、(110)面を主面とするシリコン基板に、半導体製造方法のフォトリソグラフィとドライエッチング技術を適用して作製されている。可動部とねじりバネは、図2(b)に示すように接合により一体化されている。接合する際は、可動部の結晶方位は、可動部203の主面と平行で、且つ、ねじり軸208と垂直な方向の結晶方位が[111]方位となるようにする。
【0060】
可動部、ねじりバネ等の部材を、シリコンウエハを用いてそれぞれ個別に形成することにより、ウエハ内の不要な部分を低減することができ、取り個数を増やすことができる。従って、コスト低減を行うことができる。
【0061】
図7に示すように、最も小さいねじりバネ定数を示すのは、(110)面を主面とするシリコン基板を使ったねじりバネであり、かつ、ねじり軸208に平行方向の結晶方位が、[111]方位の時である。
【0062】
従って,この構成により、ねじりバネ204a、204bの幅の加工誤差が1μm程度あっても、ねじりバネ定数のばらつきを低減することができ、加工誤差による共振周波数のばらつきを低減することができる。また、可動部の結晶方位を上記の様にすることで、高速駆動時の可動部の変形量を低減することができる。
【実施例3】
【0063】
本実施例の光偏向器の構成を図3を用いて説明する。本実施例の光偏向器は、2つの可動部303と305を有し、可動部303は反射面304を有する。可動部303と可動部305は、複数のねじりバネ302a、302bにより、支持部301に対して同一のねじり軸まわりにねじり振動可能に支持されている。
【0064】
可動部303は、ねじり軸308に垂直方向の長さが3.0mm、平行方向のサイズが1.0mm、厚さが0.3mmであり、可動部305は、ねじり軸308に垂直方向の長さが3.0mm、平行方向のサイズが1.0mm、厚さが0.3mmである。可動部305は図示しない永久磁石を有し、実施例1と同様に電磁力によって駆動することができる。
【0065】
ねじりバネ302a、302bは、(111)面を主面とするシリコン基板により作製されている。図7が示すように、(111)面を主面とするシリコン基板で作製したねじりバネは、結晶方位によらずバネ定数がほぼ一定である。従って、ねじりバネを作製する際に、ねじりバネのねじり軸方向の結晶方位がずれてしまっても、ねじりバネ定数は、ほぼ一定にすることができるので、加工誤差による共振周波数のばらつきを低減することができる。
【0066】
本実施例の光偏向器は、ねじり軸308を中心としたねじり振動について、周波数f1の1次の固有振動モードと基準周波数の略2倍の周波数となるf2の2次の固有振動モードを有している。1次のねじり振動モードに加えて、2次のねじり振動モードで同時にねじり振動させることによって、可動部303に形成された反射面304で反射された光の偏向走査の変位角は、この2つの振動モードの重ね合わせとなる。本実施例の光偏向器は、基準周波数となる1次のねじり振動モードと基準周波数の略2倍の周波数となる2次のねじり振動モードを有しているので、鋸波状の振動で光偏向器を駆動することができる。従って、角速度の変動が少ない光走査を行うことができるので、より一層、反射光のスポット形状を均一にすることが可能となる。
【実施例4】
【0067】
図5は上記光偏向器を用いた光学機器の実施例を示す図である。図5は、光学機器の一つである画像形成装置を示している。図5において、503は本発明の光偏向器であり、本実施例では入射光を1次元に走査する。501はレーザ光源である。502はレンズあるいはレンズ群であり、504は書き込みレンズ或いはレンズ群、505は感光体、506は走査軌跡である。レーザ光源501から射出されたレーザ光は、光の偏向走査のタイミングと関係した所定の強度変調を受けて、光偏向器503により1次元的に走査する。この走査されたレーザ光は書き込みレンズ504により、感光体505上へ画像を形成する。感光体505は図示しない帯電器により一様に帯電されており、この上に光を走査することによりその部分に静電潜像を形成する。次に、図示しない現像器により静電潜像の画像部分にトナー像を形成し、これを例えば図示しない用紙に転写・定着することで用紙上に画像が形成される。反射面の平坦性が高く、加工誤差による周波数変動を低減した光偏向器を用いることにより、安定した画像を形成することができる。
【0068】
また、本発明に係る光偏向器をプロジェクションディスプレイなどの画像表示装置に用いる場合は、以下のような構成とする。画像データに基づいて変調された光ビームを発生する光源からの光ビームを、本発明に係る光偏向器で偏向し、該光ビームを被照射体に照射することで画像を形成する。光偏向器は、光ビームを被照射体上の主走査方向と副走査方向に偏向できるような構成とする。
【0069】
上記の様に、本発明に係る光偏向器はこのような光学機器にも適用することができる。
【産業上の利用可能性】
【0070】
本発明は、揺動体装置、光偏向器及びそれを用いた画像形成装置に関する。例えば、光の偏向走査によって画像を投影するプロジェクションディスプレイや、電子写真プロセスを有するレーザービームプリンタ、デジタル複写機等の画像形成装置に好適なものである。
【図面の簡単な説明】
【0071】
【図1】(a)本発明の実施形態の揺動体装置及び実施例1の光偏向器を説明するための上面図である。(b)本発明の実施形態の揺動体装置及び実施例1の光偏向器を説明するための断面図である。
【図2】(a)本発明の実施例2の光偏向器を説明するための上面図である。(b)本発明の実施例2の光偏向器を説明するための断面図である。
【図3】本発明の実施例3の光偏向器を説明するための上面図である。
【図4】本発明の実施例4の画像形成装置を説明するための図である。
【図5】(a)、(b)、(c)光偏向器の変形を説明するための図である。
【図6】本発明の可動部の変形量の結晶面依存性を示す図である。
【図7】本発明のねじりバネのばね定数の結晶面依存性を示す図である。
【図8】従来技術を示す斜視図である。
【符号の説明】
【0072】
20 支持部
22、24 ねじりバネ
30 可動部
101、201、301 支持部
102、202、304 反射面
103、203、303、305 可動部
104a、104b、204a、204b、302a、302b ねじりバネ
105、205 固定部
106、206 永久磁石
107、207、コイル
108、208、308 ねじり軸
1000、1001、2000、2001、2002、2003、3000、3001 結晶方位
501 レーザ光源
502 レンズ
503 光走査系
504 書き込みレンズ
505 感光体
506 走査軌跡
【特許請求の範囲】
【請求項1】
支持部と、可動部と、前記可動部を前記支持部に対してねじり軸まわりにねじり振動可能に支持するねじりバネと、前記可動部を振動させる駆動手段とを有する揺動体装置であって、
前記可動部は、単結晶シリコンで形成され、前記可動部の主面の結晶面は(110)面であって、前記可動部の主面と平行で、且つ前記ねじり軸と垂直な方向の結晶方位が[111]方位であることを特徴とする揺動体装置。
【請求項2】
前記ねじりバネは単結晶シリコンで形成され、前記ねじりバネの前記ねじり軸に平行な方向の結晶方位が[111]方位であることを特徴とする請求項1に記載の揺動体装置。
【請求項3】
前記ねじりバネが(111)面を主面とする単結晶シリコンで形成されていることを特徴とする請求項1に記載の揺動体装置。
【請求項4】
前記支持部と、前記可動部と、前記ねじりバネとが単結晶シリコンで一体形成されていることを特徴とする請求項1に記載の揺動体装置。
【請求項5】
請求項1乃至4のいずれか1項に記載の揺動体装置と、前記可動部の上に形成された反射面を有することを特徴とする光偏向器。
【請求項6】
複数の可動部と、前記複数の可動部を同一のねじり軸まわりにねじり振動可能に支持する複数のねじりバネとを有し、前記反射面は前記複数の可動部の少なくとも一つに形成され、前記ねじり軸まわりに基準周波数となる固有周波数と前記基準周波数の整数倍の固有周波数とを有することを特徴とする請求項5に記載の光偏向器。
【請求項7】
光源と、請求項5又は6に記載の光偏向器と、感光体とを有し、前記光偏向器は、前記光源からの光を前記光偏向器により偏向し、前記光の少なくとも一部を前記感光体に照射し静電潜像を形成することを特徴とする画像形成装置。
【請求項1】
支持部と、可動部と、前記可動部を前記支持部に対してねじり軸まわりにねじり振動可能に支持するねじりバネと、前記可動部を振動させる駆動手段とを有する揺動体装置であって、
前記可動部は、単結晶シリコンで形成され、前記可動部の主面の結晶面は(110)面であって、前記可動部の主面と平行で、且つ前記ねじり軸と垂直な方向の結晶方位が[111]方位であることを特徴とする揺動体装置。
【請求項2】
前記ねじりバネは単結晶シリコンで形成され、前記ねじりバネの前記ねじり軸に平行な方向の結晶方位が[111]方位であることを特徴とする請求項1に記載の揺動体装置。
【請求項3】
前記ねじりバネが(111)面を主面とする単結晶シリコンで形成されていることを特徴とする請求項1に記載の揺動体装置。
【請求項4】
前記支持部と、前記可動部と、前記ねじりバネとが単結晶シリコンで一体形成されていることを特徴とする請求項1に記載の揺動体装置。
【請求項5】
請求項1乃至4のいずれか1項に記載の揺動体装置と、前記可動部の上に形成された反射面を有することを特徴とする光偏向器。
【請求項6】
複数の可動部と、前記複数の可動部を同一のねじり軸まわりにねじり振動可能に支持する複数のねじりバネとを有し、前記反射面は前記複数の可動部の少なくとも一つに形成され、前記ねじり軸まわりに基準周波数となる固有周波数と前記基準周波数の整数倍の固有周波数とを有することを特徴とする請求項5に記載の光偏向器。
【請求項7】
光源と、請求項5又は6に記載の光偏向器と、感光体とを有し、前記光偏向器は、前記光源からの光を前記光偏向器により偏向し、前記光の少なくとも一部を前記感光体に照射し静電潜像を形成することを特徴とする画像形成装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−31642(P2009−31642A)
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願番号】特願2007−197393(P2007−197393)
【出願日】平成19年7月30日(2007.7.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願日】平成19年7月30日(2007.7.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]