
揺動椅子
【課題】使用者が下半身をほぐす動作に適した姿勢をとることのできる揺動椅子を提供する。
【解決手段】揺動椅子1には、臀部を支持する座部20と、背中を支持する背もたれ30と、脚を支持するオットマン40と、座部20を揺動させる揺動機構50とが設けられている。オットマン40と座部20とが連結されている。そして、オットマン40は、座部20に対する姿勢を変更することができる。
【解決手段】揺動椅子1には、臀部を支持する座部20と、背中を支持する背もたれ30と、脚を支持するオットマン40と、座部20を揺動させる揺動機構50とが設けられている。オットマン40と座部20とが連結されている。そして、オットマン40は、座部20に対する姿勢を変更することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、臀部を支持する座部と、背中を支持する背もたれと、脚を支持するオットマンと、座部およびオットマンの少なくとも一方を揺動させる揺動機構とを備える揺動椅子に関する。
【背景技術】
【0002】
上記揺動椅子として、特許文献1に記載のものが知られている。
同文献の揺動椅子には、座部および脚支持部(足ガイド5a)を含めて単一の部材により形成された座体5と、座部の中央に設けられて座体5の回転中心となる竪軸7と、脚支持部に対して脚高さ方向に移動可能な足載せ9とが設けられている。
【0003】
この揺動椅子においては、座体5を竪軸7まわりで回転させることにより使用者の下半身を揺動させることができる。また、脚支持部に対する足載せ9の位置を変更することにより、膝関節の曲げ具合を変更することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63−154174号公報(第1図等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
揺動椅子を用いて下半身を揺動させるときには、使用者がリラックスした姿勢をとることにより下半身をほぐす効果が高くなる。一方、リラックスした姿勢は使用者毎に異なるため、揺動椅子においては、下半身を揺動させるときに使用者が多様な姿勢をとることが可能な構成を備えることが好ましい。
【0006】
しかし、特許文献1の揺動椅子においては、座部と脚支持部とが互いに固定されているため、下半身を揺動させるときの脚の姿勢も固定される。このため、使用者がリラックスした姿勢をとることができないケースが生じる。また、足載せ9を上方に移動させることにより膝関節を曲げることができるものの、このときには下肢が体幹に近づけられるため、揺動により下半身をほぐす効果が十分に得られないと考えられる。
【0007】
本発明は上記課題を解決するためになされたものであり、その目的は、使用者が下半身をほぐす動作に適した姿勢をとることのできる揺動椅子を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するための手段を以下に記載する。
・本発明の揺動椅子は、臀部を支持する座部と、背中を支持する背もたれと、脚を支持するオットマンと、前記座部および前記オットマンの少なくとも一方を揺動させる揺動機構とを備える揺動椅子において、前記オットマンと前記座部とが互いに連結されていること、ならびに、前記オットマンと前記座部との相対的な姿勢を変更することができることを特徴としている。
【0009】
・この揺動椅子においては、前記座部に対する前記オットマンの姿勢を変更するアクチュエータが設けられていることが好ましい。
・この揺動椅子においては、前記揺動機構の揺動方向において前記座部と前記オットマンとが相対的に移動することができることが好ましい。
【0010】
・この揺動椅子においては、前記揺動椅子の本体に対する前記座部の座面の姿勢を変更することができることが好ましい。
・この揺動椅子においては、前記座部に対する前記背もたれの姿勢を変更するアクチュエータが設けられていることが好ましい。
【0011】
・この揺動椅子においては、前記座部および前記背もたれおよび前記オットマンの少なくとも1つに身体を支持する凹部が設けられていることが好ましい。
・この揺動椅子においては、前記凹部の形状を変更する変更機構が設けられていることが好ましい。
【0012】
・この揺動椅子においては、背中を施術する施術子が設けられていることが好ましい。
・この揺動椅子においては、前記揺動機構が前記座部および前記オットマンを揺動させるときの振幅の大きさを変更することができることが好ましい。
【0013】
・この揺動椅子においては、前記揺動機構が前記座部に連結されていること、ならびに、前記オットマンが前記座部の揺動に連動して前記座部と一体的に揺動することが好ましい。
【0014】
・この揺動椅子においては、前記揺動機構が前記オットマンに連結されていること、ならびに、前記座部が前記オットマンの揺動に連動して前記オットマンと一体的に揺動することが好ましい。
【発明の効果】
【0015】
本発明によれば、使用者が下半身をほぐす動作に適した姿勢をとることのできる揺動椅子を提供することができる。
【図面の簡単な説明】
【0016】
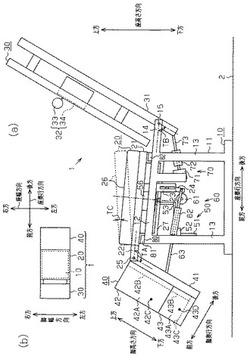
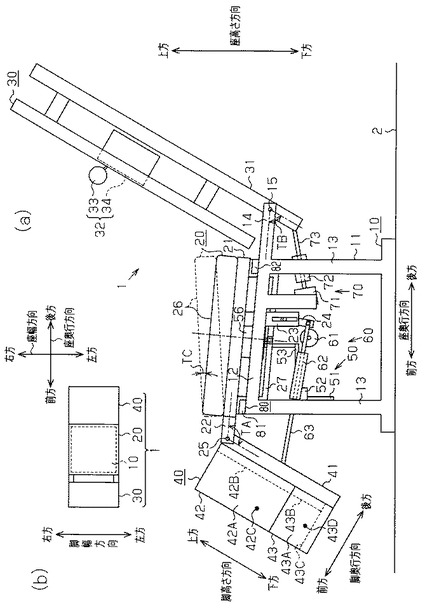
【図1】本発明の第1実施形態の揺動椅子について、(a)はその側面構造を模式的に示す側面図、(b)は同(a)の平面構造を模式的に示す平面図。
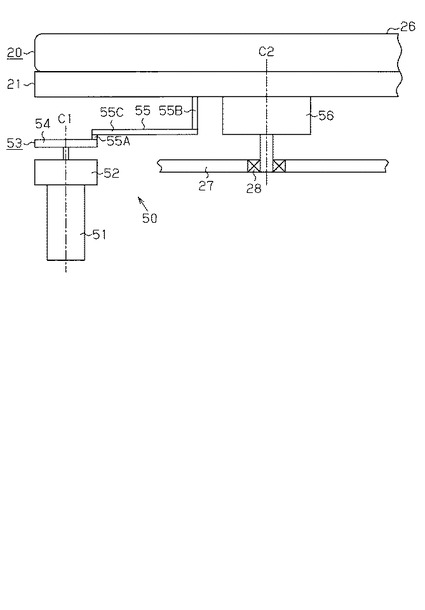
【図2】同実施形態の揺動椅子について、揺動機構を模式的に示す模式図。
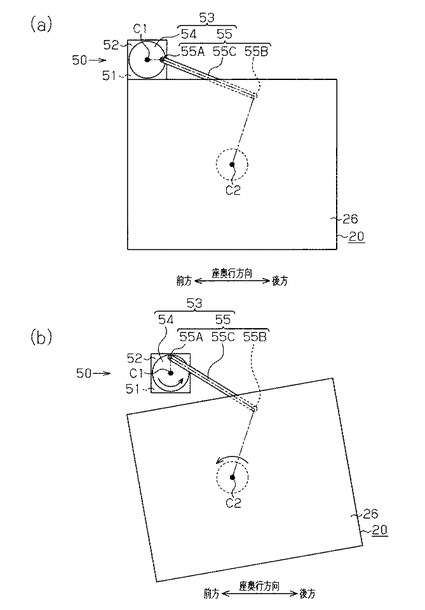
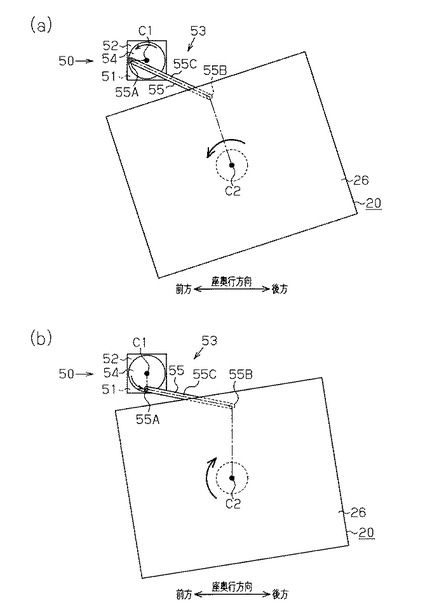
【図3】同実施形態の揺動椅子について、(a)は座部が基準揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図、(b)は座部が中間揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図。
【図4】同実施形態の揺動椅子について、(a)は座部が最大揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図、(b)は座部が中間揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図。
【図5】同実施形態の揺動椅子について、座部およびオットマンの揺動態様を模式的に示す動作図。
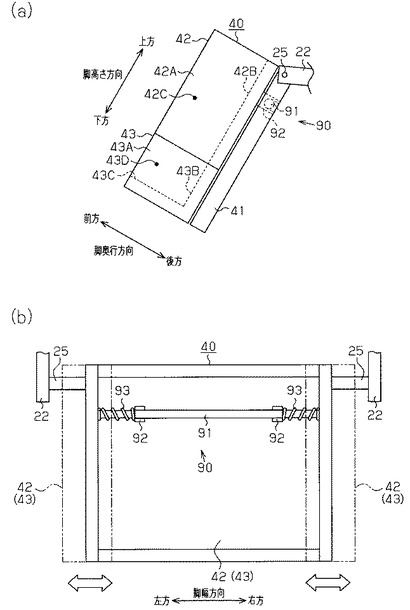
【図6】本発明の第2実施形態の揺動椅子について、(a)はオットマンの側面構造を示す側面図、(b)はオットマンの背面構造を示す背面図。
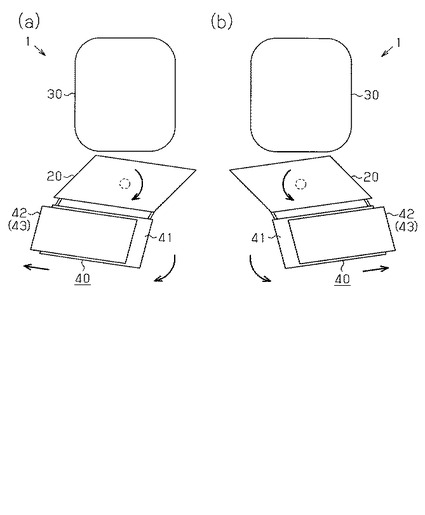
【図7】同実施形態の揺動椅子について、座部およびオットマンの揺動態様を模式的に示す動作図。
【図8】本発明のその他の実施形態の揺動椅子について、その正面構造を模式的に示す正面図。
【図9】本発明のその他の実施形態の揺動椅子について、(a)はその正面構造を模式的に示す正面図、(b)は同(a)のA−A線に沿う断面構造を示す断面図。
【図10】本発明のその他の実施形態の揺動椅子について、座部の正面構造を模式的に示す正面図。
【図11】本発明のその他の実施形態の揺動椅子について、オットマンの平面構造を模式的に示す平面図。
【発明を実施するための形態】
【0017】
(第1実施形態)
図1を参照して、揺動椅子1の構成について説明する。
揺動椅子1には、その本体を構成して床面2に載せられる椅子本体10と、臀部を支持する座部20と、背中を支持する背もたれ30と、脚および足を支持するオットマン40とが設けられている。またこの他に、座部20およびオットマン40を椅子本体10に対して回転させる揺動機構50と、揺動椅子1の各部分を構成する複数のフレームとが設けられている。
【0018】
この複数のフレームとしては、椅子本体10を構成する本体フレーム11と、座部20を構成する座フレーム21と、背もたれ30を構成する背フレーム31と、オットマン40を構成する脚フレーム41とが設けられている。
【0019】
座フレーム21は、本体フレーム11に対する移動が可能な状態で同フレーム11に接続されている。背フレーム31は、本体フレーム11に対する回転が可能な状態で同フレーム11に接続されている。脚フレーム41は、座フレーム21に対する回転が可能な状態で同フレーム21に接続されている。
【0020】
ここで、椅子本体10について次のように方向を定義する。
(a)床面2に直交する方向を「座高さ方向」とし、座高さ方向において床面2から離れる方向を「上方」とし、座高さ方向において床面2に近づく方向を「下方」とする。
(b)揺動椅子1に着座した使用者の幅方向を「座幅方向」とし、座幅方向において同使用者から見て左側に向かう方向を「左方」とし、座幅方向において同使用者から見て右側に向かう方向を「右方」とする。
(c)座高さ方向および座幅方向に直交する方向を「座奥行方向」とし、座奥行方向において背もたれ30からオットマン40に向かう方向を「前方」とし、座奥行方向においてオットマン40から背もたれ30に向かう方向を「後方」とする。
【0021】
また、オットマン40について次のように方向を定義する。
(a)オットマン40の長手方向を「脚高さ方向」とし、脚高さ方向においてオットマン40の先端部から座部20との接続部分に向かう方向を「上方」とし、脚高さ方向において座部20との接続部分からオットマン40の先端部に向かう方向を「下方」とする。
(b)揺動椅子1に着座した使用者の幅方向を「脚幅方向」とし、脚幅方向において同使用者から見て左側に向かう方向を「左方」とし、脚幅方向において同使用者から見て右側に向かう方向を「右方」とする。
(c)脚高さ方向および脚幅方向に直交する方向を「脚奥行方向」とし、脚奥行方向においてオットマン40の正面側から背面側に向かう方向を「前方」とし、脚奥行方向においてオットマン40の背面側から正面側に向かう方向を「後方」とする。
【0022】
椅子本体10の構成について説明する。
本体フレーム11には、枠形状の本体部12と、本体部12の四隅から下方に向けて延びる4つの脚部13と、本体部12の四隅のうちの後方の2箇所から後方に向けて突出する2つの接続部14とが設けられている。またこの他に、一方の接続部14と他方の接続部14とにより支持される回転軸15が設けられている。
【0023】
回転軸15には、同回転軸15に対する回転が可能な状態で背フレーム31が取り付けられている。背フレーム31が回転軸15まわりを回転することにより、本体フレーム11に対する背フレーム31の姿勢が変化する。
【0024】
座部20の構成について説明する。
座部20には、揺動機構50の一部を支持する凹形状の支持体27と、座フレーム21の前端部から前方に向けて延びる2つの連結部22と、座フレーム21の下面側から下方に向けて延びる2つの固定部23とが設けられている。またこの他に、固定部23に対する座高さ方向への移動および固定部23に対する回転が可能な状態で各固定部23により支持される移動部24と、一方の連結部22と他方の連結部22とにより支持される回転軸25が設けられている。
【0025】
回転軸25には、同回転軸25に対する回転が可能な状態で脚フレーム41が取り付けられている。脚フレーム41が回転軸25まわりを回転することにより、座面26に対する脚フレーム41の姿勢が変化する。
【0026】
オットマン40の構成について説明する。
オットマン40には、脚を支持する脚支持部42と、足を支持する足支持部43とが設けられている。脚支持部42には、脚を脚幅方向から支持する脚側壁42Aと、下腿を背面側から支持する脚背壁42Bとが設けられている。脚支持部42においては、脚側壁42Aおよび脚背壁42Bにより脚を収容するための脚収容空間42Cが形成されている。
【0027】
足支持部43には、足を脚幅方向から支持する足側壁43Aと、足を背面側から支持する足背壁43Bと、足裏を支持する足底壁43Cとが設けられている。足支持部43においては、足側壁43A、足背壁43B、および足底壁43Cにより足を収容するための足収容空間43Dが形成されている。
【0028】
以下の説明では、座高さ方向および座奥行方向をそれぞれ縦軸および横軸とする仮想の平面を基準面としたとき、揺動椅子1においてこの基準面に対して平行する断面を基準断面とする。また、基準断面において各構成要素の中心線により形成される成す角を次のように定義する。
【0029】
すなわち、座フレーム21の中心線と脚フレーム41の中心線とが成す角を「脚フレーム回転角TA」とする。また、接続部14の中心線と背フレーム31の中心線とが成す角を「背フレーム回転角TB」とする。また、本体フレーム11の本体部12の中心線と座フレーム21の中心線とが成す角を「座フレーム回転角TC」とする。
【0030】
脚フレーム回転角TAは、本体フレーム11に対する脚フレーム41の回転位置を示すパラメータに相当する。背フレーム回転角TBは、本体フレーム11に対する背フレーム31の回転位置を示すパラメータに相当する。座フレーム回転角TCは、本体フレーム11に対する座フレーム21の回転位置を示すパラメータに相当する。
【0031】
オットマン40の動作について説明する。
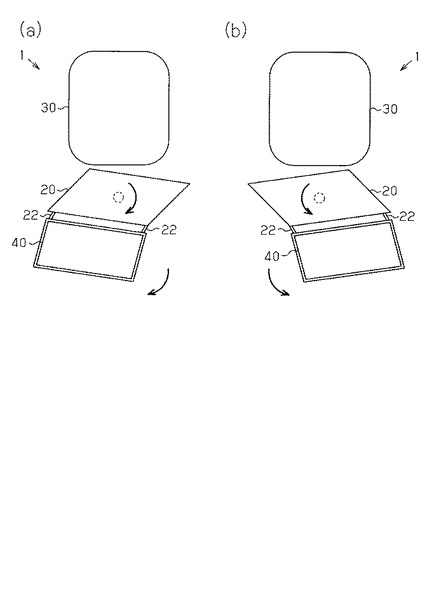
座部20に対するオットマン40の姿勢は、以下の「平行姿勢」、「下方傾斜姿勢」、および「上方傾斜姿勢」の3つに分類される。
(a)平行姿勢は、脚フレーム41の中心線が座フレーム21の中心線に平行しているときのオットマン40の姿勢を示す。
(b)下方傾斜姿勢は、脚フレーム41の中心線が座フレーム21の中心線に対して後方から前方に向かうにつれて上方から下方に向けて傾斜しているときのオットマン40の姿勢を示す。
(c)上方傾斜姿勢は、脚フレーム41の中心線が座フレーム21の中心線に対して後方から前方に向かうにつれて下方から上方に向けて傾斜しているときのオットマン40の姿勢を示す。
【0032】
オットマン40が平行姿勢のとき、脚フレーム回転角TAは「0」となる。オットマン40が下方傾斜姿勢のとき、脚フレーム回転角TAは正の角度となる。オットマン40が上方傾斜姿勢のとき、脚フレーム回転角TAは負の角度となる。
【0033】
脚フレーム回転角TAは、正の角度のうちの最も大きい角度を「正の最大回転角度TAP」とし、負の角度のうちの最も大きい角度を「負の最大回転角度TAN」として、正の最大回転角度TAPから負の最大回転角度TANまでの範囲で変更することができる。揺動椅子1においては、正の最大回転角度TAPの絶対値が負の最大回転角度TANの絶対値よりも大きく設定されている。
【0034】
背もたれ30の動作について説明する。
座部20に対する背もたれ30の姿勢は、以下の「直立姿勢」、「後方傾斜姿勢」、および「平行姿勢」の3つに分類される。
(a)直立姿勢は、背フレーム31の中心線が接続部14の中心線に対して直交しているときの背もたれ30の姿勢を示す。
(b)後方傾斜姿勢は、背フレーム31の中心線が接続部14の中心線に対して下方から上方に向かうにつれて前方から後方に向けて傾斜しているときの背もたれ30の姿勢を示す。
(c)平行姿勢は、背フレーム31の中心線が接続部14の中心線に平行しているときの背もたれ30の姿勢を示す。
【0035】
背もたれ30が直立姿勢のとき、背フレーム回転角TBは「90°」となる。背もたれ30が後方傾斜姿勢のとき、背フレーム回転角TBは正の角度となる。背もたれ30が平行姿勢のとき、背フレーム回転角TBは「0°」となる。背フレーム回転角TBは、「0°」から「90°」までの範囲で変更することができる。
【0036】
座部20の動作について説明する。
椅子本体10に対する座面26の姿勢は、以下の「平行姿勢」、「後方上昇姿勢」、および「前方上昇姿勢」の3つに分類される。
(a)平行姿勢は、座フレーム21が本体部12の中心線と平行な仮想線に平行しているときの座面26の姿勢を示す。
(b)後方上昇姿勢は、座フレーム21が前方から後方に向かうにつれて下方から上方に向けて傾斜しているときの座面26の姿勢を示す。
(c)前方上昇姿勢は、座フレーム21が前方から後方に向かうにつれて上方から下方に向けて傾斜しているときの座面26の姿勢を示す。
【0037】
座面26が平行姿勢のとき、座フレーム回転角TCは「0°」となる。座面26が後方上昇姿勢のとき、座フレーム回転角TCは正の角度となる。座面26が前方上昇姿勢のとき、座フレーム回転角TCは負の角度となる。
【0038】
座フレーム回転角TCは、正の角度のうちの最も大きい角度を「正の最大回転角度TCP」とし、負の角度のうちの最も大きい角度を「負の最大回転角度TCN」として、正の最大回転角度TCPから負の最大回転角度TCNまでの範囲で変更することができる。
【0039】
以下では、揺動椅子1の右側面視において、連結部22まわりの脚フレーム41の時計方向への回転を「脚フレーム41の上昇方向への回転」とし、連結部22まわりの脚フレーム41の反時計回りの回転を「脚フレーム41の下降方向への回転」とする。
【0040】
また、回転軸15まわりの背フレーム31の時計回りへの回転を「背フレーム31の下降方向への回転」とし、回転軸15まわりの背フレーム31の反時計回りの回転を「背フレーム31の上昇方向への回転」とする。
【0041】
座フレーム21には、脚フレーム回転角TAを変更する第1角度調整機構60が設けられている。本体フレーム11の本体部12には、背フレーム回転角TBを変更する第2角度調整機構70と、座フレーム回転角TCを変更する第3角度調整機構80とが設けられている。なお、第1角度調整機構60は「オットマン角度調整機構」に相当し、第2角度調整機構70は「背もたれ角度調整機構」に相当し、第3角度調整機構80は「座部角度調整機構」に相当する。
【0042】
第1角度調整機構60には、駆動源となる第1モータ61と、第1モータ61の出力軸に接続される第1ボールねじ62と、第1ボールねじ62および脚フレーム41に接続される第1シャフト63とが設けられている。第1シャフト63は、第1ボールねじ62の回転にともない、同ボールねじ62の軸方向に移動する。なお、第1モータ61、第1ボールねじ62、および第1シャフト63は「アクチュエータ」に相当する。
【0043】
第2角度調整機構70には、駆動源となる第2モータ71と、第2モータ71の出力軸に接続される第2ボールねじ72と、第2ボールねじ72および背フレーム31に接続される第2シャフト73とが設けられている。第2シャフト73は、第2ボールねじ72の回転にともない、同ボールねじ72の軸方向に移動する。なお、第2モータ71、第2ボールねじ72、および第2シャフト73は「アクチュエータ」に相当する。
【0044】
第3角度調整機構80には、駆動源となるエアポンプ(図示略)と、エアポンプからの空気の給排により座高さ方向に昇降する前方シリンダ81および後方シリンダ82とが設けられている。前方シリンダ81は、本体部12の前方に2つ設けられている。後方シリンダ82は、本体部12の後方に2つ設けられている。各前方シリンダ81は、座部20の前端部に接続されている。各後方シリンダ82は、座フレーム21の後端部に接続されている。
【0045】
背もたれ30には、使用者の腰、背中、肩、および首を施術する施術機構32が設けられている。施術機構32には、使用者に接触する施術子33と、施術子33を駆動させる駆動部34とが設けられている。
【0046】
揺動椅子1には、第1角度調整機構60、第2角度調整機構70、揺動機構50、第3角度調整機構80、および施術機構32を制御するための制御装置が設けられている。すなわち、第1モータ61、第2モータ71、揺動機構50のモータ51、および第3角度調整機構80のエアポンプ、および駆動部34が制御装置により制御される。
【0047】
図1を参照して、各フレームの角度調整について説明する。
第1角度調整機構60による脚フレーム41の角度調整は次のように行なわれる。
第1モータ61の正方向の回転にともない第1ボールねじ62が正方向に回転するとき、第1シャフト63が第1ボールねじ62の軸方向において前方に向けて移動する。第1シャフト63が前方に移動することにより、第1シャフト63と脚フレーム41との接続部分が前方に移動するため、脚フレーム41が回転軸25まわりにおいて上昇方向に回転する。このため、脚フレーム回転角TAが次第に小さくなる。
【0048】
第1モータ61の逆方向の回転にともない第1ボールねじ62が逆方向に回転するとき、第1シャフト63が第1ボールねじ62の軸方向において後方に向けて移動する。第1シャフト63が後方に移動することにより、第1シャフト63と脚フレーム41との接続部分が後方に移動するため、脚フレーム41が回転軸25まわりにおいて下降方向に回転する。このため、脚フレーム回転角TAが次第に大きくなる。
【0049】
第2角度調整機構70による背フレーム31の角度調整は次のように行なわれる。
第2モータ71の正方向の回転にともない第2ボールねじ72が正方向に回転するとき、第2シャフト73が第2ボールねじ72の軸方向において前方に向けて移動する。第2シャフト73が前方に移動することにより、第2シャフト73と背フレーム31との接続部分が前方に移動するため、背フレーム31が回転軸15まわりにおいて下降方向に回転する。このため、背フレーム回転角TBが次第に小さくなる。
【0050】
第2モータ71の逆方向の回転にともない第2ボールねじ72が逆方向に回転するとき、第2シャフト73が第2ボールねじ72の軸方向において後方に向けて移動する。第2シャフト73が後方に移動することにより、第2シャフト73と背フレーム31との接続部分が後方に移動するため、背フレーム31が回転軸15まわりにおいて上昇方向に回転する。このため、背フレーム回転角TBが次第に大きくなる。
【0051】
第3角度調整機構80による座フレーム21の角度調整は次のように行なわれる。
エアポンプからの空気が前方シリンダ81および後方シリンダ82のうちの前者のみに供給されるとき、各シリンダ81,82のうちの前方シリンダ81のみが上方に移動する。これにより、座部20の前端部が上方に移動するため、正の方向において座フレーム回転角TCが次第に大きくなる。
【0052】
エアポンプからの空気が前方シリンダ81および後方シリンダ82のうちの後者のみに供給されるとき、各シリンダ81,82のうちの後方シリンダ82のみが上方に移動する。これにより、座部20の後端部が上方に移動するため、負の方向において座フレーム回転角TCが次第に大きくなる。
【0053】
図2を参照して、揺動機構50の詳細な構成について説明する。
揺動機構50には、駆動源となるモータ51と、モータ51の回転を減速する減速機構52と、減速機構52の回転を座部20の揺動運動に変換するクランク53と、座部20を支持する支持部材56とが設けられている。
【0054】
クランク53には、減速機構52の出力軸に接続される回転板54と、回転板54と座部20とを互いに接続するアーム55とが設けられている。アーム55には、回転板54に接続される第1端部55Aと、座部20に接続される第2端部55Bと、各端部55A,55Bのそれぞれに対する回転が可能な状態で各端部55A,55Bのそれぞれに接続される接続部55Cとが設けられている。
【0055】
第1端部55Aは、回転板54の回転中心C1とは異なる位置に設けられている。すなわち、第1端部55Aの軸線は回転中心C1に対して偏心している。第2端部55Bは、座部20の揺動中心C2とは異なる位置に設けられている。すなわち、第2端部55Bの軸線は、揺動中心C2に対して偏心している。
【0056】
支持部材56には、座部20の支持体27に対する回転が可能な状態で同部材56を支持する玉軸受28が設けられている。支持部材56の座部20側の部分は、座フレーム21に固定されている。これにより、支持部材56は支持体27に対して座フレーム21と一体的に回転する。
【0057】
図3および図4を参照して、揺動機構50の動作について説明する。
図3(a)に示されるように、クランク53の第1端部55Aの位置が基準位置(以下、「駆動側基準位置」)、かつ第2端部55Bの位置が基準位置(以下、「従動側基準位置」)のとき、座部20の揺動位置が「基準揺動位置」に保持される。
【0058】
図3(a)の状態からモータ51が反時計回り方向に回転することにより、クランク53の第1端部55Aが駆動側基準位置から回転中心C1まわりで反時計回り方向に回転する。また接続部55Cが第1端部55Aおよび第2端部55Bに対して回転しながら座奥行方向の前方に移動する。また、この接続部55Cの移動にともない第2端部55Bが揺動中心C2まわりで反時計回り方向に回転する。このため、座部20が揺動中心C2まわりで反時計回り方向に回転する。これにより、座部20の揺動位置が図3(a)の基準揺動位置から図3(b)の中間揺動位置に変更される。
【0059】
図3(b)の状態からモータ51が反時計回り方向にさらに回転することにより、接続部55Cが第1端部55Aおよび第2端部55Bに対して回転しながら座奥行方向の前方にさらに移動する。また、この接続部55Cの移動にともない第2端部55Bが揺動中心C2まわりで反時計回り方向にさらに回転する。このため、座部20が揺動中心C2まわりで反時計回り方向にさらに回転する。これにより、座部20の揺動位置が図3(b)の中間揺動位置から図4(a)の最大揺動位置に変更される。
【0060】
図4(a)に示されるように、第1端部55Aが駆動側基準位置から反時計回り方向に「180°」回転したとき、すなわち、第2端部55Bが従動側基準位置から反時計回り方向に「180°」回転したとき、接続部55Cが奥行方向の最も前方の位置に移動した状態となる。このため、座部20の揺動位置が最大揺動位置、すなわち揺動可能範囲内において座部20の揺動量が最も大きい位置となる。
【0061】
図4(a)の状態からモータ51が反時計回り方向にさらに回転することにより、接続部55Cが第1端部55Aおよび第2端部55Bに対して回転しながら座奥行方向の後方にさらに移動する。また、この接続部55Cの移動にともない第2端部55Bが揺動中心C2まわりで時計回り方向にさらに回転する。このため、座部20が揺動中心C2まわりで時計回り方向にさらに回転する。これにより、座部20の揺動位置が図4(a)の最大揺動位置から図4(b)の中間揺動位置に変更される。
【0062】
以上のように、揺動機構50は図3(a)の基準揺動位置から図4(a)の最大用同位置までの範囲において座部20の揺動位置を変更する。すなわち、揺動位置が基準揺動位置のときを座部20の揺動量が「0」の状態とし、揺動位置が最大揺動位置のときを座部20の揺動量が最大の状態として、前者の状態から後者の状態までの間で座部20を揺動させることにより座部20の揺動量を変更する。
【0063】
図5を参照して、座部20およびオットマン40の動作について説明する。
揺動椅子1においては、座部20とオットマン40とが連結部22により互いに接続されているため、使用者が着座した状態において図3の揺動機構50により座部20が揺動させられるとき、座部20の揺動運動に連動してオットマン40が揺動する。
【0064】
次に、揺動椅子1の動作モードについて説明する。
揺動椅子1の動作モードとしては、以下の第1モード〜第4モードが予め用意されている。揺動椅子1の制御装置は、コントローラの操作に応じて揺動椅子1の動作モードを選択し、選択した動作モードに応じて各機構を制御する。
【0065】
なお、以下の各動作モードの説明に記載の各用語はそれぞれ次のものを示している。「揺動実行」は、図3の揺動機構50により座部20およびオットマン40の揺動動作が行われる状態を示す。「揺動停止」は、揺動機構50による座部20およびオットマン40の揺動動作が行われない状態を示す。「施術実行」は、図1の駆動部34により施術子33の駆動が行われる状態を示す。「施術停止」は、駆動部34による施術子33の駆動が行われない状態を示す。
【0066】
各動作モードにおいては以下のように各機構が制御される。
(A)第1モードでは、「揺動実行」かつ「施術停止」となる。
(B)第2モードでは、「揺動実行」かつ「施術実行」となる。
(C)第3モードでは、「揺動停止」かつ「施術停止」となる。
(D)第4モードでは、「揺動停止」かつ「施術実行」となる。
【0067】
(実施形態の効果)
本実施形態の揺動椅子1によれば、以下の効果が得られる。
(1)揺動椅子1には、本体フレーム11に対する脚フレーム41の回転位置(脚フレーム回転角TA)を変更する第1角度調整機構60と、座部20を揺動させる揺動機構50と、座部20とオットマン40とを互いに連結する連結部22とが設けられている。この構成によれば、揺動機構50により座部20を揺動させるとき、連結部22によりオットマン40も一体的に揺動する。そして、揺動機構50により座部20およびオットマン40を一体的に揺動させるとき、第1角度調整機構60により脚フレーム回転角TAを変更することができる。したがって、使用者が下半身をほぐす動作に適した姿勢をとることができる。
【0068】
(2)揺動椅子1には、脚フレーム回転角TAを変更する第1モータ61が設けられている。この構成によれば、手動により脚フレーム回転角TAを変更する構成と比較して、揺動椅子1の利便性が高くなる。
【0069】
(3)揺動椅子1には、本体フレーム11に対する座フレーム21の回転位置(座フレーム回転角TC)を変更する第3角度調整機構80が設けられている。この構成によれば、揺動機構50により座部20およびオットマン40を揺動させるとき、座フレーム回転角TCを変更することができる。すなわち、下半身を揺動させるときに使用者が多様な姿勢をとることができる。
【0070】
(4)揺動椅子1には、座フレーム回転角TCを変更するエアポンプが設けられている。この構成によれば、手動により座フレーム回転角TCを変更する構成と比較して、揺動椅子1の利便性が高くなる。
【0071】
(5)揺動椅子1には、本体フレーム11に対する背フレーム31の回転位置(背フレーム回転角TB)を変更する第2角度調整機構70が設けられている。この構成によれば、揺動機構50により座部20およびオットマン40を揺動させるとき、背フレーム回転角TBを変更することができる。すなわち、下半身を揺動させるときに使用者が多様な姿勢をとることができる。
【0072】
(6)揺動椅子1には、背フレーム回転角TBを変更する第2モータ71が設けられている。この構成によれば、手動により背フレーム回転角TBを変更する構成と比較して、揺動椅子1の利便性が高くなる。
【0073】
(7)揺動椅子1においては、揺動機構50が座部20に連結されている。この構成によれば、使用者の臀部を支持する座部20が揺動機構50により直接的に揺動させられるため、揺動機構50をオットマン40に連結する構成と比較して、下半身を効率よく揺動させることができる。
【0074】
(第2実施形態)
第2実施形態の揺動椅子1は、第1実施形態の揺動椅子1の一部を変更したものとして構成されている。このため、以下では第1実施形態の揺動椅子1と異なる点の詳細を説明し、同実施形態と共通する構成については同一の符号を付してその説明の一部または全部を省略する。
【0075】
第1実施形態の揺動椅子1においては、オットマン40の脚支持部42および足支持部43が脚フレーム41に固定されている。これに対して、第2実施形態の揺動椅子1においては、脚フレーム41と脚支持部42および足支持部43とを相対的に移動させるための脚移動機構90が設けられている。
【0076】
図6(a)に示されるように、この実施形態のオットマン40においては、脚フレーム41と脚支持部42とを互いに接続する脚移動機構90が設けられている。また、脚支持部42および足支持部43は、それぞれ脚フレーム41に対して脚奥行方向の前方に離間して設けられている。
【0077】
図6(b)に示されるように、脚移動機構90には、脚フレーム41の左方の部分と右方の部分とにまたがり延びるシャフト91と、脚幅方向に移動可能な状態でシャフト91に取り付けられる2つの支持部92とが設けられている。またこの他に、支持部92に対して脚幅方向の力を付与する2つのコイルばね93が設けられている。
【0078】
シャフト91は、脚フレーム41に固定されている。各支持部92は、脚支持部42の背面に固定されている。各コイルばね93は、シャフト91上において支持部92と脚フレーム41との間に設けられている。
【0079】
図6(b)を参照して、脚支持部42および足支持部43の動作について説明する。
座フレーム21が脚幅方向の右方に移動するとき、座フレーム21とともに脚フレーム41が同方向に移動する。このとき、脚フレーム41に固定されているシャフト91が支持部92に対して同方向に移動する。このため、図中の二点鎖線で示されるように、脚フレーム41と脚支持部42および足支持部43とが脚幅方向において相対的に移動する。
【0080】
脚フレーム41が脚支持部42および足支持部43に対して右方に移動したとき、右方のコイルばね93が圧縮されるため、脚フレーム41が右方に相対移動しようとする力が減衰される。なお、座フレーム21が脚方向の左方に移動するときには、上記に準じた態様で脚フレーム41が脚支持部42および足支持部43に対して左方に移動する。
【0081】
図7を参照して、座部20およびオットマン40の動作について説明する。
揺動椅子1においては、座部20とオットマン40とが連結部22により互いに接続されているため、使用者が着座した状態において図3の揺動機構50により座部20が揺動させられるとき、座部20の揺動運動に連動してオットマン40が揺動する。
【0082】
また、脚フレーム41と脚支持部42および足支持部43との間に脚移動機構90が設けられているため、脚フレーム41と脚支持部42および足支持部43とが脚幅方向において相対的に移動する。
【0083】
(実施形態の効果)
本実施形態の揺動椅子1によれば、第1実施形態の(1)〜(7)の効果、および以下の効果が得られる。
【0084】
(8)揺動椅子1には、脚フレーム41と脚支持部42および足支持部43とを相対的に移動させるための脚移動機構90が設けられている。この構成によれば、揺動機構50の揺動方向において座部20と脚支持部42および足支持部43とが相対的に移動するため、座部20の揺動方向と脚支持部42および足支持部43の揺動方向とが互いに異なる状態が得られる。このため、下半身を揺動させることにより下半身をほぐす効果がより高くなる。
【0085】
(その他の実施形態)
本発明の実施態様は上記各実施形態の内容に限定されるものではなく、例えば以下のように変更することもできる。また、以下の変形例は上記各実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施することもできる。
【0086】
・第1実施形態では、揺動機構50が座部20を揺動させるときの振幅を一定の大きさに設定しているが、モータ51の制御により同振幅の大きさを変更することもできる。この場合、モータ51の制御は次のように行なわれる。
【0087】
すなわち、座部20の揺動位置が図3(a)の基準揺動位置から図3(b)の最大揺動位置に変更されるまでの間にモータ51の回転方向を時計回り方向に変更する。これにより、座部20の揺動位置が最大揺動位置に変更される前に接続部55Cが座奥行方向の後方に移動するため、座部20の揺動位置が再び基準揺動位置に向けて変化する。このため、座部20の揺動位置が基準揺動位置から最大揺動位置までの間で変更される場合と比較して、座部20の揺動量すなわち、揺動機構50が座部20を揺動させるときの振幅が小さくなる。
【0088】
・上記各実施形態において、揺動椅子1に対する身体の位置を保持するための構成を追加することもできる。この構成の一例としては、例えば以下の(A)および(B)の構成が挙げられる。
【0089】
(A)図8に示されるように、座部20に対する臀部の座幅方向への移動を規制するための凹部101を座部20に設ける。この凹部101は、例えば、図1の座フレーム21の形状を凹形状に変更することにより座部20に設けることができる。
【0090】
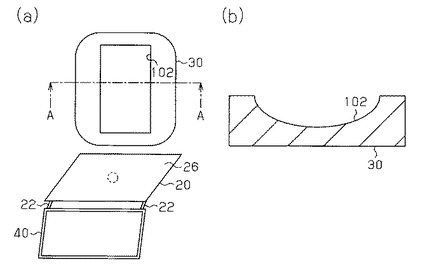
(B)図9に示されるように、背もたれ30に対する背中の座幅方向への移動を規制するための凹部101を背もたれ30に設ける。この凹部102は、例えば、図1の背フレーム31の形状を凹形状に変更することにより背もたれ30に設けることができる。
【0091】
上記(A)および(B)の構成によれば、揺動椅子1に対する身体の位置が安定する。このため、揺動機構50により臀部および脚に揺動が付与されている場合において、揺動椅子1に対する身体の位置が規定の位置からずれることを抑制することができる。
【0092】
・上記図8の変形例に対して、座部20の凹部101の座幅方向の大きさを変更するための構成を追加することもできる。図10を参照して、この変形例の具体的な構成について説明する。
【0093】
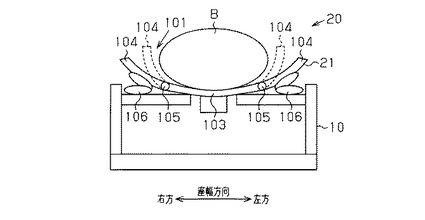
座部20には、臀部Bを支持する湾曲形状の座支持部103と、座支持部103に対する座幅方向への臀部Bの揺動可能領域を調整する座調整部104と、座調整部104を座支持部103に対して回転を可能な状態で支持する回転軸105とが設けられる。また、本体フレーム11の本体部12には、座調整部104を座支持部103に対して回転させるためのエアバッグ106が設けられる。なお、座調整部104、回転軸105、およびエアバッグ106は「変更機構」に相当する。
【0094】
上記の座部20においては、エアバッグ106が膨張するとき、座調整部104が臀部Bに近づく方向に回転する。これにより、座幅方向においての臀部Bの揺動可能領域が小さくなる。一方、エアバッグ106が収縮するとき、座調整部104が自重により臀部Bから離れる方向に回転する。これにより、座幅方向においての臀部Bの揺動可能領域が大きくなる。
【0095】
この構成によれば、座部20に対する臀部Bの座幅方向への揺動量が凹部101の大きさに応じて変更される。このため、臀部Bに対して多様な揺動運動を行なわせることが可能になる。
【0096】
・上記図9の変形例に対して、上記図10の変形例の構成に準じた構成、すなわち背もたれ30に対する背中の揺動可能領域を変更する構成を追加することもできる。この背もたれ30においては、背もたれ30に対する背中の座幅方向への揺動可能領域が凹部102の大きさに応じて変更される。このため、背中に対して多様な揺動運動を行なわせることが可能になる。
【0097】
・上記各実施形態において、オットマン40の脚収容空間42Cの脚幅方向の大きさを変更する機構を追加することもできる。図11を参照して、この変形例の具体的な構成について説明する。
【0098】
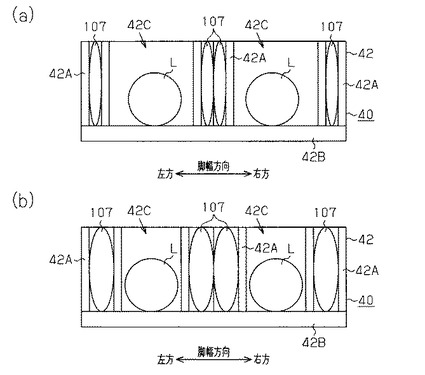
図11(a)に示されるように、脚側壁42A内にはエアバッグ107が設けられる。また、各脚側壁42Aは2つの壁部により構成される。右方の脚側壁42Aの脚L側の壁部、左方の脚側壁42Aの脚L側の壁部、および中央の脚側壁42Aの各壁部は、脚背壁42Bに対して幅方向に移動可能な状態で脚背壁42Bに取り付けられる。
【0099】
図11(b)に示されるように、このオットマン40においては、各エアバッグ107が膨張することにより、右方の脚側壁42Aの壁部、左方の脚側壁42Aの壁部、および中央の脚側壁42Aの各壁部が脚Lに向けて移動する。これにより、脚収容空間42Cの脚幅方向の大きさが各エアバッグ107の膨張前よりも小さくなる。なお、脚側壁42Aおよびエアバッグ107は「変更機構」に相当する。
【0100】
この構成によれば、オットマン40に対する脚Lの脚幅方向への移動量が各脚側壁42Aの壁部の位置に応じて変更される。このため、脚Lに対して多様な揺動運動を行なわせることが可能になる。
【0101】
・上記各実施形態において、図1に示されるオットマン40の足底壁43Cを足側壁43Aおよび足背壁43Bに対して脚高さ方向に移動させるための機構をオットマン40に追加することもできる。この構成によれば、足側壁43Aおよび足背壁43Bに対する足底壁43Cの高さを変更することにより、膝関節の曲がり具合を変更することができる。
【0102】
・上記各実施形態では、揺動機構50が座部20を直接的に揺動させる構成、すなわち揺動機構50が座部20に連結される構成を用いているが、これを次のように変更することもできる。すなわち、揺動機構50をオットマン40に連結することにより、揺動機構50がオットマン40を直接的に揺動させる構成に変更することもできる。
【0103】
・上記各実施形態では、揺動機構50が座部20を直接的に揺動させる構成としているが、揺動機構50として座部20を直接的に揺動させる第1の揺動機構と、オットマン40を直接的に揺動させる第2の揺動機構とにより構成することもできる。
【0104】
・上記各実施形態では、揺動機構50のモータ51を本体フレーム11の右方の脚部13の右方に固定しているが、モータ51を本体フレーム11の内部に設けることもできる。この構成によれば、揺動機構50の作動音が外部に伝わりにくくなるため、揺動機構50の動作音が使用者に不快感を与えるおそれが小さくなる。
【0105】
・上記各実施形態において、施術機構32を省略することもできる。
・上記各実施形態において、第3角度調整機構80を省略することもできる。
・上記各実施形態において、第1角度調整機構60および第2角度調整機構70の少なくとも一方を省略することもできる。
【0106】
・上記各実施形態では、図3に示される揺動中心C2まわりの回転運動として揺動する座部20およびオットマン40を用いているが、座部20およびオットマン40の揺動方向はこれに限定されない。例えば、座部20およびオットマン40の揺動方向を次の(A)〜(C)のいずれかに変更することもできる。
(A)座奥行方向に沿う直線運動としての揺動。
(B)座幅方向に沿う直線運動としての揺動。
(C)座奥行方向に沿う回転軸を中心とした回転運動としての揺動。
【0107】
・上記実施形態の座部20およびオットマン40の揺動、上記(A)の揺動、上記(B)の揺動、および上記(C)の揺動の少なくとも2つを組み合わせ、座部20およびオットマン40を揺動させることもできる。
【0108】
・上記各実施形態では、オットマン40として脚および足を脚幅方向に揺動させるものを用いているが、足のみを揺動させるオットマンを用いることもできる。また、脚のみを揺動させるオットマンを用いることもできる。
【符号の説明】
【0109】
1…揺動椅子、10…椅子本体(揺動椅子の本体)、20…座部、26…座面、30…背もたれ、33…施術子、40…オットマン、42A…脚側壁(変更機構)、50…揺動機構、60…第1角度調整機構(アクチュエータ)、70…第2角度調整機構(アクチュエータ)、101…凹部、102…凹部、104…座調整部(変更機構)、105…回転軸(変更機構)、106…エアバッグ(変更機構)、107…エアバッグ(変更機構)。
【技術分野】
【0001】
本発明は、臀部を支持する座部と、背中を支持する背もたれと、脚を支持するオットマンと、座部およびオットマンの少なくとも一方を揺動させる揺動機構とを備える揺動椅子に関する。
【背景技術】
【0002】
上記揺動椅子として、特許文献1に記載のものが知られている。
同文献の揺動椅子には、座部および脚支持部(足ガイド5a)を含めて単一の部材により形成された座体5と、座部の中央に設けられて座体5の回転中心となる竪軸7と、脚支持部に対して脚高さ方向に移動可能な足載せ9とが設けられている。
【0003】
この揺動椅子においては、座体5を竪軸7まわりで回転させることにより使用者の下半身を揺動させることができる。また、脚支持部に対する足載せ9の位置を変更することにより、膝関節の曲げ具合を変更することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63−154174号公報(第1図等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
揺動椅子を用いて下半身を揺動させるときには、使用者がリラックスした姿勢をとることにより下半身をほぐす効果が高くなる。一方、リラックスした姿勢は使用者毎に異なるため、揺動椅子においては、下半身を揺動させるときに使用者が多様な姿勢をとることが可能な構成を備えることが好ましい。
【0006】
しかし、特許文献1の揺動椅子においては、座部と脚支持部とが互いに固定されているため、下半身を揺動させるときの脚の姿勢も固定される。このため、使用者がリラックスした姿勢をとることができないケースが生じる。また、足載せ9を上方に移動させることにより膝関節を曲げることができるものの、このときには下肢が体幹に近づけられるため、揺動により下半身をほぐす効果が十分に得られないと考えられる。
【0007】
本発明は上記課題を解決するためになされたものであり、その目的は、使用者が下半身をほぐす動作に適した姿勢をとることのできる揺動椅子を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するための手段を以下に記載する。
・本発明の揺動椅子は、臀部を支持する座部と、背中を支持する背もたれと、脚を支持するオットマンと、前記座部および前記オットマンの少なくとも一方を揺動させる揺動機構とを備える揺動椅子において、前記オットマンと前記座部とが互いに連結されていること、ならびに、前記オットマンと前記座部との相対的な姿勢を変更することができることを特徴としている。
【0009】
・この揺動椅子においては、前記座部に対する前記オットマンの姿勢を変更するアクチュエータが設けられていることが好ましい。
・この揺動椅子においては、前記揺動機構の揺動方向において前記座部と前記オットマンとが相対的に移動することができることが好ましい。
【0010】
・この揺動椅子においては、前記揺動椅子の本体に対する前記座部の座面の姿勢を変更することができることが好ましい。
・この揺動椅子においては、前記座部に対する前記背もたれの姿勢を変更するアクチュエータが設けられていることが好ましい。
【0011】
・この揺動椅子においては、前記座部および前記背もたれおよび前記オットマンの少なくとも1つに身体を支持する凹部が設けられていることが好ましい。
・この揺動椅子においては、前記凹部の形状を変更する変更機構が設けられていることが好ましい。
【0012】
・この揺動椅子においては、背中を施術する施術子が設けられていることが好ましい。
・この揺動椅子においては、前記揺動機構が前記座部および前記オットマンを揺動させるときの振幅の大きさを変更することができることが好ましい。
【0013】
・この揺動椅子においては、前記揺動機構が前記座部に連結されていること、ならびに、前記オットマンが前記座部の揺動に連動して前記座部と一体的に揺動することが好ましい。
【0014】
・この揺動椅子においては、前記揺動機構が前記オットマンに連結されていること、ならびに、前記座部が前記オットマンの揺動に連動して前記オットマンと一体的に揺動することが好ましい。
【発明の効果】
【0015】
本発明によれば、使用者が下半身をほぐす動作に適した姿勢をとることのできる揺動椅子を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態の揺動椅子について、(a)はその側面構造を模式的に示す側面図、(b)は同(a)の平面構造を模式的に示す平面図。
【図2】同実施形態の揺動椅子について、揺動機構を模式的に示す模式図。
【図3】同実施形態の揺動椅子について、(a)は座部が基準揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図、(b)は座部が中間揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図。
【図4】同実施形態の揺動椅子について、(a)は座部が最大揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図、(b)は座部が中間揺動位置にあるときの座部および揺動機構の平面構造を模式的に示す平面図。
【図5】同実施形態の揺動椅子について、座部およびオットマンの揺動態様を模式的に示す動作図。
【図6】本発明の第2実施形態の揺動椅子について、(a)はオットマンの側面構造を示す側面図、(b)はオットマンの背面構造を示す背面図。
【図7】同実施形態の揺動椅子について、座部およびオットマンの揺動態様を模式的に示す動作図。
【図8】本発明のその他の実施形態の揺動椅子について、その正面構造を模式的に示す正面図。
【図9】本発明のその他の実施形態の揺動椅子について、(a)はその正面構造を模式的に示す正面図、(b)は同(a)のA−A線に沿う断面構造を示す断面図。
【図10】本発明のその他の実施形態の揺動椅子について、座部の正面構造を模式的に示す正面図。
【図11】本発明のその他の実施形態の揺動椅子について、オットマンの平面構造を模式的に示す平面図。
【発明を実施するための形態】
【0017】
(第1実施形態)
図1を参照して、揺動椅子1の構成について説明する。
揺動椅子1には、その本体を構成して床面2に載せられる椅子本体10と、臀部を支持する座部20と、背中を支持する背もたれ30と、脚および足を支持するオットマン40とが設けられている。またこの他に、座部20およびオットマン40を椅子本体10に対して回転させる揺動機構50と、揺動椅子1の各部分を構成する複数のフレームとが設けられている。
【0018】
この複数のフレームとしては、椅子本体10を構成する本体フレーム11と、座部20を構成する座フレーム21と、背もたれ30を構成する背フレーム31と、オットマン40を構成する脚フレーム41とが設けられている。
【0019】
座フレーム21は、本体フレーム11に対する移動が可能な状態で同フレーム11に接続されている。背フレーム31は、本体フレーム11に対する回転が可能な状態で同フレーム11に接続されている。脚フレーム41は、座フレーム21に対する回転が可能な状態で同フレーム21に接続されている。
【0020】
ここで、椅子本体10について次のように方向を定義する。
(a)床面2に直交する方向を「座高さ方向」とし、座高さ方向において床面2から離れる方向を「上方」とし、座高さ方向において床面2に近づく方向を「下方」とする。
(b)揺動椅子1に着座した使用者の幅方向を「座幅方向」とし、座幅方向において同使用者から見て左側に向かう方向を「左方」とし、座幅方向において同使用者から見て右側に向かう方向を「右方」とする。
(c)座高さ方向および座幅方向に直交する方向を「座奥行方向」とし、座奥行方向において背もたれ30からオットマン40に向かう方向を「前方」とし、座奥行方向においてオットマン40から背もたれ30に向かう方向を「後方」とする。
【0021】
また、オットマン40について次のように方向を定義する。
(a)オットマン40の長手方向を「脚高さ方向」とし、脚高さ方向においてオットマン40の先端部から座部20との接続部分に向かう方向を「上方」とし、脚高さ方向において座部20との接続部分からオットマン40の先端部に向かう方向を「下方」とする。
(b)揺動椅子1に着座した使用者の幅方向を「脚幅方向」とし、脚幅方向において同使用者から見て左側に向かう方向を「左方」とし、脚幅方向において同使用者から見て右側に向かう方向を「右方」とする。
(c)脚高さ方向および脚幅方向に直交する方向を「脚奥行方向」とし、脚奥行方向においてオットマン40の正面側から背面側に向かう方向を「前方」とし、脚奥行方向においてオットマン40の背面側から正面側に向かう方向を「後方」とする。
【0022】
椅子本体10の構成について説明する。
本体フレーム11には、枠形状の本体部12と、本体部12の四隅から下方に向けて延びる4つの脚部13と、本体部12の四隅のうちの後方の2箇所から後方に向けて突出する2つの接続部14とが設けられている。またこの他に、一方の接続部14と他方の接続部14とにより支持される回転軸15が設けられている。
【0023】
回転軸15には、同回転軸15に対する回転が可能な状態で背フレーム31が取り付けられている。背フレーム31が回転軸15まわりを回転することにより、本体フレーム11に対する背フレーム31の姿勢が変化する。
【0024】
座部20の構成について説明する。
座部20には、揺動機構50の一部を支持する凹形状の支持体27と、座フレーム21の前端部から前方に向けて延びる2つの連結部22と、座フレーム21の下面側から下方に向けて延びる2つの固定部23とが設けられている。またこの他に、固定部23に対する座高さ方向への移動および固定部23に対する回転が可能な状態で各固定部23により支持される移動部24と、一方の連結部22と他方の連結部22とにより支持される回転軸25が設けられている。
【0025】
回転軸25には、同回転軸25に対する回転が可能な状態で脚フレーム41が取り付けられている。脚フレーム41が回転軸25まわりを回転することにより、座面26に対する脚フレーム41の姿勢が変化する。
【0026】
オットマン40の構成について説明する。
オットマン40には、脚を支持する脚支持部42と、足を支持する足支持部43とが設けられている。脚支持部42には、脚を脚幅方向から支持する脚側壁42Aと、下腿を背面側から支持する脚背壁42Bとが設けられている。脚支持部42においては、脚側壁42Aおよび脚背壁42Bにより脚を収容するための脚収容空間42Cが形成されている。
【0027】
足支持部43には、足を脚幅方向から支持する足側壁43Aと、足を背面側から支持する足背壁43Bと、足裏を支持する足底壁43Cとが設けられている。足支持部43においては、足側壁43A、足背壁43B、および足底壁43Cにより足を収容するための足収容空間43Dが形成されている。
【0028】
以下の説明では、座高さ方向および座奥行方向をそれぞれ縦軸および横軸とする仮想の平面を基準面としたとき、揺動椅子1においてこの基準面に対して平行する断面を基準断面とする。また、基準断面において各構成要素の中心線により形成される成す角を次のように定義する。
【0029】
すなわち、座フレーム21の中心線と脚フレーム41の中心線とが成す角を「脚フレーム回転角TA」とする。また、接続部14の中心線と背フレーム31の中心線とが成す角を「背フレーム回転角TB」とする。また、本体フレーム11の本体部12の中心線と座フレーム21の中心線とが成す角を「座フレーム回転角TC」とする。
【0030】
脚フレーム回転角TAは、本体フレーム11に対する脚フレーム41の回転位置を示すパラメータに相当する。背フレーム回転角TBは、本体フレーム11に対する背フレーム31の回転位置を示すパラメータに相当する。座フレーム回転角TCは、本体フレーム11に対する座フレーム21の回転位置を示すパラメータに相当する。
【0031】
オットマン40の動作について説明する。
座部20に対するオットマン40の姿勢は、以下の「平行姿勢」、「下方傾斜姿勢」、および「上方傾斜姿勢」の3つに分類される。
(a)平行姿勢は、脚フレーム41の中心線が座フレーム21の中心線に平行しているときのオットマン40の姿勢を示す。
(b)下方傾斜姿勢は、脚フレーム41の中心線が座フレーム21の中心線に対して後方から前方に向かうにつれて上方から下方に向けて傾斜しているときのオットマン40の姿勢を示す。
(c)上方傾斜姿勢は、脚フレーム41の中心線が座フレーム21の中心線に対して後方から前方に向かうにつれて下方から上方に向けて傾斜しているときのオットマン40の姿勢を示す。
【0032】
オットマン40が平行姿勢のとき、脚フレーム回転角TAは「0」となる。オットマン40が下方傾斜姿勢のとき、脚フレーム回転角TAは正の角度となる。オットマン40が上方傾斜姿勢のとき、脚フレーム回転角TAは負の角度となる。
【0033】
脚フレーム回転角TAは、正の角度のうちの最も大きい角度を「正の最大回転角度TAP」とし、負の角度のうちの最も大きい角度を「負の最大回転角度TAN」として、正の最大回転角度TAPから負の最大回転角度TANまでの範囲で変更することができる。揺動椅子1においては、正の最大回転角度TAPの絶対値が負の最大回転角度TANの絶対値よりも大きく設定されている。
【0034】
背もたれ30の動作について説明する。
座部20に対する背もたれ30の姿勢は、以下の「直立姿勢」、「後方傾斜姿勢」、および「平行姿勢」の3つに分類される。
(a)直立姿勢は、背フレーム31の中心線が接続部14の中心線に対して直交しているときの背もたれ30の姿勢を示す。
(b)後方傾斜姿勢は、背フレーム31の中心線が接続部14の中心線に対して下方から上方に向かうにつれて前方から後方に向けて傾斜しているときの背もたれ30の姿勢を示す。
(c)平行姿勢は、背フレーム31の中心線が接続部14の中心線に平行しているときの背もたれ30の姿勢を示す。
【0035】
背もたれ30が直立姿勢のとき、背フレーム回転角TBは「90°」となる。背もたれ30が後方傾斜姿勢のとき、背フレーム回転角TBは正の角度となる。背もたれ30が平行姿勢のとき、背フレーム回転角TBは「0°」となる。背フレーム回転角TBは、「0°」から「90°」までの範囲で変更することができる。
【0036】
座部20の動作について説明する。
椅子本体10に対する座面26の姿勢は、以下の「平行姿勢」、「後方上昇姿勢」、および「前方上昇姿勢」の3つに分類される。
(a)平行姿勢は、座フレーム21が本体部12の中心線と平行な仮想線に平行しているときの座面26の姿勢を示す。
(b)後方上昇姿勢は、座フレーム21が前方から後方に向かうにつれて下方から上方に向けて傾斜しているときの座面26の姿勢を示す。
(c)前方上昇姿勢は、座フレーム21が前方から後方に向かうにつれて上方から下方に向けて傾斜しているときの座面26の姿勢を示す。
【0037】
座面26が平行姿勢のとき、座フレーム回転角TCは「0°」となる。座面26が後方上昇姿勢のとき、座フレーム回転角TCは正の角度となる。座面26が前方上昇姿勢のとき、座フレーム回転角TCは負の角度となる。
【0038】
座フレーム回転角TCは、正の角度のうちの最も大きい角度を「正の最大回転角度TCP」とし、負の角度のうちの最も大きい角度を「負の最大回転角度TCN」として、正の最大回転角度TCPから負の最大回転角度TCNまでの範囲で変更することができる。
【0039】
以下では、揺動椅子1の右側面視において、連結部22まわりの脚フレーム41の時計方向への回転を「脚フレーム41の上昇方向への回転」とし、連結部22まわりの脚フレーム41の反時計回りの回転を「脚フレーム41の下降方向への回転」とする。
【0040】
また、回転軸15まわりの背フレーム31の時計回りへの回転を「背フレーム31の下降方向への回転」とし、回転軸15まわりの背フレーム31の反時計回りの回転を「背フレーム31の上昇方向への回転」とする。
【0041】
座フレーム21には、脚フレーム回転角TAを変更する第1角度調整機構60が設けられている。本体フレーム11の本体部12には、背フレーム回転角TBを変更する第2角度調整機構70と、座フレーム回転角TCを変更する第3角度調整機構80とが設けられている。なお、第1角度調整機構60は「オットマン角度調整機構」に相当し、第2角度調整機構70は「背もたれ角度調整機構」に相当し、第3角度調整機構80は「座部角度調整機構」に相当する。
【0042】
第1角度調整機構60には、駆動源となる第1モータ61と、第1モータ61の出力軸に接続される第1ボールねじ62と、第1ボールねじ62および脚フレーム41に接続される第1シャフト63とが設けられている。第1シャフト63は、第1ボールねじ62の回転にともない、同ボールねじ62の軸方向に移動する。なお、第1モータ61、第1ボールねじ62、および第1シャフト63は「アクチュエータ」に相当する。
【0043】
第2角度調整機構70には、駆動源となる第2モータ71と、第2モータ71の出力軸に接続される第2ボールねじ72と、第2ボールねじ72および背フレーム31に接続される第2シャフト73とが設けられている。第2シャフト73は、第2ボールねじ72の回転にともない、同ボールねじ72の軸方向に移動する。なお、第2モータ71、第2ボールねじ72、および第2シャフト73は「アクチュエータ」に相当する。
【0044】
第3角度調整機構80には、駆動源となるエアポンプ(図示略)と、エアポンプからの空気の給排により座高さ方向に昇降する前方シリンダ81および後方シリンダ82とが設けられている。前方シリンダ81は、本体部12の前方に2つ設けられている。後方シリンダ82は、本体部12の後方に2つ設けられている。各前方シリンダ81は、座部20の前端部に接続されている。各後方シリンダ82は、座フレーム21の後端部に接続されている。
【0045】
背もたれ30には、使用者の腰、背中、肩、および首を施術する施術機構32が設けられている。施術機構32には、使用者に接触する施術子33と、施術子33を駆動させる駆動部34とが設けられている。
【0046】
揺動椅子1には、第1角度調整機構60、第2角度調整機構70、揺動機構50、第3角度調整機構80、および施術機構32を制御するための制御装置が設けられている。すなわち、第1モータ61、第2モータ71、揺動機構50のモータ51、および第3角度調整機構80のエアポンプ、および駆動部34が制御装置により制御される。
【0047】
図1を参照して、各フレームの角度調整について説明する。
第1角度調整機構60による脚フレーム41の角度調整は次のように行なわれる。
第1モータ61の正方向の回転にともない第1ボールねじ62が正方向に回転するとき、第1シャフト63が第1ボールねじ62の軸方向において前方に向けて移動する。第1シャフト63が前方に移動することにより、第1シャフト63と脚フレーム41との接続部分が前方に移動するため、脚フレーム41が回転軸25まわりにおいて上昇方向に回転する。このため、脚フレーム回転角TAが次第に小さくなる。
【0048】
第1モータ61の逆方向の回転にともない第1ボールねじ62が逆方向に回転するとき、第1シャフト63が第1ボールねじ62の軸方向において後方に向けて移動する。第1シャフト63が後方に移動することにより、第1シャフト63と脚フレーム41との接続部分が後方に移動するため、脚フレーム41が回転軸25まわりにおいて下降方向に回転する。このため、脚フレーム回転角TAが次第に大きくなる。
【0049】
第2角度調整機構70による背フレーム31の角度調整は次のように行なわれる。
第2モータ71の正方向の回転にともない第2ボールねじ72が正方向に回転するとき、第2シャフト73が第2ボールねじ72の軸方向において前方に向けて移動する。第2シャフト73が前方に移動することにより、第2シャフト73と背フレーム31との接続部分が前方に移動するため、背フレーム31が回転軸15まわりにおいて下降方向に回転する。このため、背フレーム回転角TBが次第に小さくなる。
【0050】
第2モータ71の逆方向の回転にともない第2ボールねじ72が逆方向に回転するとき、第2シャフト73が第2ボールねじ72の軸方向において後方に向けて移動する。第2シャフト73が後方に移動することにより、第2シャフト73と背フレーム31との接続部分が後方に移動するため、背フレーム31が回転軸15まわりにおいて上昇方向に回転する。このため、背フレーム回転角TBが次第に大きくなる。
【0051】
第3角度調整機構80による座フレーム21の角度調整は次のように行なわれる。
エアポンプからの空気が前方シリンダ81および後方シリンダ82のうちの前者のみに供給されるとき、各シリンダ81,82のうちの前方シリンダ81のみが上方に移動する。これにより、座部20の前端部が上方に移動するため、正の方向において座フレーム回転角TCが次第に大きくなる。
【0052】
エアポンプからの空気が前方シリンダ81および後方シリンダ82のうちの後者のみに供給されるとき、各シリンダ81,82のうちの後方シリンダ82のみが上方に移動する。これにより、座部20の後端部が上方に移動するため、負の方向において座フレーム回転角TCが次第に大きくなる。
【0053】
図2を参照して、揺動機構50の詳細な構成について説明する。
揺動機構50には、駆動源となるモータ51と、モータ51の回転を減速する減速機構52と、減速機構52の回転を座部20の揺動運動に変換するクランク53と、座部20を支持する支持部材56とが設けられている。
【0054】
クランク53には、減速機構52の出力軸に接続される回転板54と、回転板54と座部20とを互いに接続するアーム55とが設けられている。アーム55には、回転板54に接続される第1端部55Aと、座部20に接続される第2端部55Bと、各端部55A,55Bのそれぞれに対する回転が可能な状態で各端部55A,55Bのそれぞれに接続される接続部55Cとが設けられている。
【0055】
第1端部55Aは、回転板54の回転中心C1とは異なる位置に設けられている。すなわち、第1端部55Aの軸線は回転中心C1に対して偏心している。第2端部55Bは、座部20の揺動中心C2とは異なる位置に設けられている。すなわち、第2端部55Bの軸線は、揺動中心C2に対して偏心している。
【0056】
支持部材56には、座部20の支持体27に対する回転が可能な状態で同部材56を支持する玉軸受28が設けられている。支持部材56の座部20側の部分は、座フレーム21に固定されている。これにより、支持部材56は支持体27に対して座フレーム21と一体的に回転する。
【0057】
図3および図4を参照して、揺動機構50の動作について説明する。
図3(a)に示されるように、クランク53の第1端部55Aの位置が基準位置(以下、「駆動側基準位置」)、かつ第2端部55Bの位置が基準位置(以下、「従動側基準位置」)のとき、座部20の揺動位置が「基準揺動位置」に保持される。
【0058】
図3(a)の状態からモータ51が反時計回り方向に回転することにより、クランク53の第1端部55Aが駆動側基準位置から回転中心C1まわりで反時計回り方向に回転する。また接続部55Cが第1端部55Aおよび第2端部55Bに対して回転しながら座奥行方向の前方に移動する。また、この接続部55Cの移動にともない第2端部55Bが揺動中心C2まわりで反時計回り方向に回転する。このため、座部20が揺動中心C2まわりで反時計回り方向に回転する。これにより、座部20の揺動位置が図3(a)の基準揺動位置から図3(b)の中間揺動位置に変更される。
【0059】
図3(b)の状態からモータ51が反時計回り方向にさらに回転することにより、接続部55Cが第1端部55Aおよび第2端部55Bに対して回転しながら座奥行方向の前方にさらに移動する。また、この接続部55Cの移動にともない第2端部55Bが揺動中心C2まわりで反時計回り方向にさらに回転する。このため、座部20が揺動中心C2まわりで反時計回り方向にさらに回転する。これにより、座部20の揺動位置が図3(b)の中間揺動位置から図4(a)の最大揺動位置に変更される。
【0060】
図4(a)に示されるように、第1端部55Aが駆動側基準位置から反時計回り方向に「180°」回転したとき、すなわち、第2端部55Bが従動側基準位置から反時計回り方向に「180°」回転したとき、接続部55Cが奥行方向の最も前方の位置に移動した状態となる。このため、座部20の揺動位置が最大揺動位置、すなわち揺動可能範囲内において座部20の揺動量が最も大きい位置となる。
【0061】
図4(a)の状態からモータ51が反時計回り方向にさらに回転することにより、接続部55Cが第1端部55Aおよび第2端部55Bに対して回転しながら座奥行方向の後方にさらに移動する。また、この接続部55Cの移動にともない第2端部55Bが揺動中心C2まわりで時計回り方向にさらに回転する。このため、座部20が揺動中心C2まわりで時計回り方向にさらに回転する。これにより、座部20の揺動位置が図4(a)の最大揺動位置から図4(b)の中間揺動位置に変更される。
【0062】
以上のように、揺動機構50は図3(a)の基準揺動位置から図4(a)の最大用同位置までの範囲において座部20の揺動位置を変更する。すなわち、揺動位置が基準揺動位置のときを座部20の揺動量が「0」の状態とし、揺動位置が最大揺動位置のときを座部20の揺動量が最大の状態として、前者の状態から後者の状態までの間で座部20を揺動させることにより座部20の揺動量を変更する。
【0063】
図5を参照して、座部20およびオットマン40の動作について説明する。
揺動椅子1においては、座部20とオットマン40とが連結部22により互いに接続されているため、使用者が着座した状態において図3の揺動機構50により座部20が揺動させられるとき、座部20の揺動運動に連動してオットマン40が揺動する。
【0064】
次に、揺動椅子1の動作モードについて説明する。
揺動椅子1の動作モードとしては、以下の第1モード〜第4モードが予め用意されている。揺動椅子1の制御装置は、コントローラの操作に応じて揺動椅子1の動作モードを選択し、選択した動作モードに応じて各機構を制御する。
【0065】
なお、以下の各動作モードの説明に記載の各用語はそれぞれ次のものを示している。「揺動実行」は、図3の揺動機構50により座部20およびオットマン40の揺動動作が行われる状態を示す。「揺動停止」は、揺動機構50による座部20およびオットマン40の揺動動作が行われない状態を示す。「施術実行」は、図1の駆動部34により施術子33の駆動が行われる状態を示す。「施術停止」は、駆動部34による施術子33の駆動が行われない状態を示す。
【0066】
各動作モードにおいては以下のように各機構が制御される。
(A)第1モードでは、「揺動実行」かつ「施術停止」となる。
(B)第2モードでは、「揺動実行」かつ「施術実行」となる。
(C)第3モードでは、「揺動停止」かつ「施術停止」となる。
(D)第4モードでは、「揺動停止」かつ「施術実行」となる。
【0067】
(実施形態の効果)
本実施形態の揺動椅子1によれば、以下の効果が得られる。
(1)揺動椅子1には、本体フレーム11に対する脚フレーム41の回転位置(脚フレーム回転角TA)を変更する第1角度調整機構60と、座部20を揺動させる揺動機構50と、座部20とオットマン40とを互いに連結する連結部22とが設けられている。この構成によれば、揺動機構50により座部20を揺動させるとき、連結部22によりオットマン40も一体的に揺動する。そして、揺動機構50により座部20およびオットマン40を一体的に揺動させるとき、第1角度調整機構60により脚フレーム回転角TAを変更することができる。したがって、使用者が下半身をほぐす動作に適した姿勢をとることができる。
【0068】
(2)揺動椅子1には、脚フレーム回転角TAを変更する第1モータ61が設けられている。この構成によれば、手動により脚フレーム回転角TAを変更する構成と比較して、揺動椅子1の利便性が高くなる。
【0069】
(3)揺動椅子1には、本体フレーム11に対する座フレーム21の回転位置(座フレーム回転角TC)を変更する第3角度調整機構80が設けられている。この構成によれば、揺動機構50により座部20およびオットマン40を揺動させるとき、座フレーム回転角TCを変更することができる。すなわち、下半身を揺動させるときに使用者が多様な姿勢をとることができる。
【0070】
(4)揺動椅子1には、座フレーム回転角TCを変更するエアポンプが設けられている。この構成によれば、手動により座フレーム回転角TCを変更する構成と比較して、揺動椅子1の利便性が高くなる。
【0071】
(5)揺動椅子1には、本体フレーム11に対する背フレーム31の回転位置(背フレーム回転角TB)を変更する第2角度調整機構70が設けられている。この構成によれば、揺動機構50により座部20およびオットマン40を揺動させるとき、背フレーム回転角TBを変更することができる。すなわち、下半身を揺動させるときに使用者が多様な姿勢をとることができる。
【0072】
(6)揺動椅子1には、背フレーム回転角TBを変更する第2モータ71が設けられている。この構成によれば、手動により背フレーム回転角TBを変更する構成と比較して、揺動椅子1の利便性が高くなる。
【0073】
(7)揺動椅子1においては、揺動機構50が座部20に連結されている。この構成によれば、使用者の臀部を支持する座部20が揺動機構50により直接的に揺動させられるため、揺動機構50をオットマン40に連結する構成と比較して、下半身を効率よく揺動させることができる。
【0074】
(第2実施形態)
第2実施形態の揺動椅子1は、第1実施形態の揺動椅子1の一部を変更したものとして構成されている。このため、以下では第1実施形態の揺動椅子1と異なる点の詳細を説明し、同実施形態と共通する構成については同一の符号を付してその説明の一部または全部を省略する。
【0075】
第1実施形態の揺動椅子1においては、オットマン40の脚支持部42および足支持部43が脚フレーム41に固定されている。これに対して、第2実施形態の揺動椅子1においては、脚フレーム41と脚支持部42および足支持部43とを相対的に移動させるための脚移動機構90が設けられている。
【0076】
図6(a)に示されるように、この実施形態のオットマン40においては、脚フレーム41と脚支持部42とを互いに接続する脚移動機構90が設けられている。また、脚支持部42および足支持部43は、それぞれ脚フレーム41に対して脚奥行方向の前方に離間して設けられている。
【0077】
図6(b)に示されるように、脚移動機構90には、脚フレーム41の左方の部分と右方の部分とにまたがり延びるシャフト91と、脚幅方向に移動可能な状態でシャフト91に取り付けられる2つの支持部92とが設けられている。またこの他に、支持部92に対して脚幅方向の力を付与する2つのコイルばね93が設けられている。
【0078】
シャフト91は、脚フレーム41に固定されている。各支持部92は、脚支持部42の背面に固定されている。各コイルばね93は、シャフト91上において支持部92と脚フレーム41との間に設けられている。
【0079】
図6(b)を参照して、脚支持部42および足支持部43の動作について説明する。
座フレーム21が脚幅方向の右方に移動するとき、座フレーム21とともに脚フレーム41が同方向に移動する。このとき、脚フレーム41に固定されているシャフト91が支持部92に対して同方向に移動する。このため、図中の二点鎖線で示されるように、脚フレーム41と脚支持部42および足支持部43とが脚幅方向において相対的に移動する。
【0080】
脚フレーム41が脚支持部42および足支持部43に対して右方に移動したとき、右方のコイルばね93が圧縮されるため、脚フレーム41が右方に相対移動しようとする力が減衰される。なお、座フレーム21が脚方向の左方に移動するときには、上記に準じた態様で脚フレーム41が脚支持部42および足支持部43に対して左方に移動する。
【0081】
図7を参照して、座部20およびオットマン40の動作について説明する。
揺動椅子1においては、座部20とオットマン40とが連結部22により互いに接続されているため、使用者が着座した状態において図3の揺動機構50により座部20が揺動させられるとき、座部20の揺動運動に連動してオットマン40が揺動する。
【0082】
また、脚フレーム41と脚支持部42および足支持部43との間に脚移動機構90が設けられているため、脚フレーム41と脚支持部42および足支持部43とが脚幅方向において相対的に移動する。
【0083】
(実施形態の効果)
本実施形態の揺動椅子1によれば、第1実施形態の(1)〜(7)の効果、および以下の効果が得られる。
【0084】
(8)揺動椅子1には、脚フレーム41と脚支持部42および足支持部43とを相対的に移動させるための脚移動機構90が設けられている。この構成によれば、揺動機構50の揺動方向において座部20と脚支持部42および足支持部43とが相対的に移動するため、座部20の揺動方向と脚支持部42および足支持部43の揺動方向とが互いに異なる状態が得られる。このため、下半身を揺動させることにより下半身をほぐす効果がより高くなる。
【0085】
(その他の実施形態)
本発明の実施態様は上記各実施形態の内容に限定されるものではなく、例えば以下のように変更することもできる。また、以下の変形例は上記各実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施することもできる。
【0086】
・第1実施形態では、揺動機構50が座部20を揺動させるときの振幅を一定の大きさに設定しているが、モータ51の制御により同振幅の大きさを変更することもできる。この場合、モータ51の制御は次のように行なわれる。
【0087】
すなわち、座部20の揺動位置が図3(a)の基準揺動位置から図3(b)の最大揺動位置に変更されるまでの間にモータ51の回転方向を時計回り方向に変更する。これにより、座部20の揺動位置が最大揺動位置に変更される前に接続部55Cが座奥行方向の後方に移動するため、座部20の揺動位置が再び基準揺動位置に向けて変化する。このため、座部20の揺動位置が基準揺動位置から最大揺動位置までの間で変更される場合と比較して、座部20の揺動量すなわち、揺動機構50が座部20を揺動させるときの振幅が小さくなる。
【0088】
・上記各実施形態において、揺動椅子1に対する身体の位置を保持するための構成を追加することもできる。この構成の一例としては、例えば以下の(A)および(B)の構成が挙げられる。
【0089】
(A)図8に示されるように、座部20に対する臀部の座幅方向への移動を規制するための凹部101を座部20に設ける。この凹部101は、例えば、図1の座フレーム21の形状を凹形状に変更することにより座部20に設けることができる。
【0090】
(B)図9に示されるように、背もたれ30に対する背中の座幅方向への移動を規制するための凹部101を背もたれ30に設ける。この凹部102は、例えば、図1の背フレーム31の形状を凹形状に変更することにより背もたれ30に設けることができる。
【0091】
上記(A)および(B)の構成によれば、揺動椅子1に対する身体の位置が安定する。このため、揺動機構50により臀部および脚に揺動が付与されている場合において、揺動椅子1に対する身体の位置が規定の位置からずれることを抑制することができる。
【0092】
・上記図8の変形例に対して、座部20の凹部101の座幅方向の大きさを変更するための構成を追加することもできる。図10を参照して、この変形例の具体的な構成について説明する。
【0093】
座部20には、臀部Bを支持する湾曲形状の座支持部103と、座支持部103に対する座幅方向への臀部Bの揺動可能領域を調整する座調整部104と、座調整部104を座支持部103に対して回転を可能な状態で支持する回転軸105とが設けられる。また、本体フレーム11の本体部12には、座調整部104を座支持部103に対して回転させるためのエアバッグ106が設けられる。なお、座調整部104、回転軸105、およびエアバッグ106は「変更機構」に相当する。
【0094】
上記の座部20においては、エアバッグ106が膨張するとき、座調整部104が臀部Bに近づく方向に回転する。これにより、座幅方向においての臀部Bの揺動可能領域が小さくなる。一方、エアバッグ106が収縮するとき、座調整部104が自重により臀部Bから離れる方向に回転する。これにより、座幅方向においての臀部Bの揺動可能領域が大きくなる。
【0095】
この構成によれば、座部20に対する臀部Bの座幅方向への揺動量が凹部101の大きさに応じて変更される。このため、臀部Bに対して多様な揺動運動を行なわせることが可能になる。
【0096】
・上記図9の変形例に対して、上記図10の変形例の構成に準じた構成、すなわち背もたれ30に対する背中の揺動可能領域を変更する構成を追加することもできる。この背もたれ30においては、背もたれ30に対する背中の座幅方向への揺動可能領域が凹部102の大きさに応じて変更される。このため、背中に対して多様な揺動運動を行なわせることが可能になる。
【0097】
・上記各実施形態において、オットマン40の脚収容空間42Cの脚幅方向の大きさを変更する機構を追加することもできる。図11を参照して、この変形例の具体的な構成について説明する。
【0098】
図11(a)に示されるように、脚側壁42A内にはエアバッグ107が設けられる。また、各脚側壁42Aは2つの壁部により構成される。右方の脚側壁42Aの脚L側の壁部、左方の脚側壁42Aの脚L側の壁部、および中央の脚側壁42Aの各壁部は、脚背壁42Bに対して幅方向に移動可能な状態で脚背壁42Bに取り付けられる。
【0099】
図11(b)に示されるように、このオットマン40においては、各エアバッグ107が膨張することにより、右方の脚側壁42Aの壁部、左方の脚側壁42Aの壁部、および中央の脚側壁42Aの各壁部が脚Lに向けて移動する。これにより、脚収容空間42Cの脚幅方向の大きさが各エアバッグ107の膨張前よりも小さくなる。なお、脚側壁42Aおよびエアバッグ107は「変更機構」に相当する。
【0100】
この構成によれば、オットマン40に対する脚Lの脚幅方向への移動量が各脚側壁42Aの壁部の位置に応じて変更される。このため、脚Lに対して多様な揺動運動を行なわせることが可能になる。
【0101】
・上記各実施形態において、図1に示されるオットマン40の足底壁43Cを足側壁43Aおよび足背壁43Bに対して脚高さ方向に移動させるための機構をオットマン40に追加することもできる。この構成によれば、足側壁43Aおよび足背壁43Bに対する足底壁43Cの高さを変更することにより、膝関節の曲がり具合を変更することができる。
【0102】
・上記各実施形態では、揺動機構50が座部20を直接的に揺動させる構成、すなわち揺動機構50が座部20に連結される構成を用いているが、これを次のように変更することもできる。すなわち、揺動機構50をオットマン40に連結することにより、揺動機構50がオットマン40を直接的に揺動させる構成に変更することもできる。
【0103】
・上記各実施形態では、揺動機構50が座部20を直接的に揺動させる構成としているが、揺動機構50として座部20を直接的に揺動させる第1の揺動機構と、オットマン40を直接的に揺動させる第2の揺動機構とにより構成することもできる。
【0104】
・上記各実施形態では、揺動機構50のモータ51を本体フレーム11の右方の脚部13の右方に固定しているが、モータ51を本体フレーム11の内部に設けることもできる。この構成によれば、揺動機構50の作動音が外部に伝わりにくくなるため、揺動機構50の動作音が使用者に不快感を与えるおそれが小さくなる。
【0105】
・上記各実施形態において、施術機構32を省略することもできる。
・上記各実施形態において、第3角度調整機構80を省略することもできる。
・上記各実施形態において、第1角度調整機構60および第2角度調整機構70の少なくとも一方を省略することもできる。
【0106】
・上記各実施形態では、図3に示される揺動中心C2まわりの回転運動として揺動する座部20およびオットマン40を用いているが、座部20およびオットマン40の揺動方向はこれに限定されない。例えば、座部20およびオットマン40の揺動方向を次の(A)〜(C)のいずれかに変更することもできる。
(A)座奥行方向に沿う直線運動としての揺動。
(B)座幅方向に沿う直線運動としての揺動。
(C)座奥行方向に沿う回転軸を中心とした回転運動としての揺動。
【0107】
・上記実施形態の座部20およびオットマン40の揺動、上記(A)の揺動、上記(B)の揺動、および上記(C)の揺動の少なくとも2つを組み合わせ、座部20およびオットマン40を揺動させることもできる。
【0108】
・上記各実施形態では、オットマン40として脚および足を脚幅方向に揺動させるものを用いているが、足のみを揺動させるオットマンを用いることもできる。また、脚のみを揺動させるオットマンを用いることもできる。
【符号の説明】
【0109】
1…揺動椅子、10…椅子本体(揺動椅子の本体)、20…座部、26…座面、30…背もたれ、33…施術子、40…オットマン、42A…脚側壁(変更機構)、50…揺動機構、60…第1角度調整機構(アクチュエータ)、70…第2角度調整機構(アクチュエータ)、101…凹部、102…凹部、104…座調整部(変更機構)、105…回転軸(変更機構)、106…エアバッグ(変更機構)、107…エアバッグ(変更機構)。
【特許請求の範囲】
【請求項1】
臀部を支持する座部と、背中を支持する背もたれと、脚を支持するオットマンと、前記座部および前記オットマンの少なくとも一方を揺動させる揺動機構とを備える揺動椅子において、
前記オットマンと前記座部とが互いに連結されていること、
ならびに、前記オットマンと前記座部との相対的な姿勢を変更することができること
を特徴とする揺動椅子。
【請求項2】
請求項1に記載の揺動椅子において、
前記座部に対する前記オットマンの姿勢を変更するアクチュエータが設けられていること
を特徴とする揺動椅子。
【請求項3】
請求項1または2に記載の揺動椅子において、
前記揺動機構の揺動方向において前記座部と前記オットマンとが相対的に移動することができること
を特徴とする揺動椅子。
【請求項4】
請求項1〜3のいずれか一項に記載の揺動椅子において、
前記揺動椅子の本体に対する前記座部の座面の姿勢を変更することができること
を特徴とする揺動椅子。
【請求項5】
請求項1〜4のいずれか一項に記載の揺動椅子において、
前記座部に対する前記背もたれの姿勢を変更するアクチュエータが設けられていること
を特徴とする揺動椅子。
【請求項6】
請求項1〜5のいずれか一項に記載の揺動椅子において、
前記座部および前記背もたれおよび前記オットマンの少なくとも1つに身体を支持する凹部が設けられていること
を特徴とする揺動椅子。
【請求項7】
請求項6に記載の揺動椅子において、
前記凹部の形状を変更する変更機構が設けられていること
を特徴とする揺動椅子。
【請求項8】
請求項1〜7のいずれか一項に記載の揺動椅子において、
背中を施術する施術子が設けられていること
を特徴とする揺動椅子。
【請求項9】
請求項1〜8のいずれか一項に記載の揺動椅子において、
前記揺動機構が前記座部および前記オットマンを揺動させるときの振幅の大きさを変更することができること
を特徴とする揺動椅子。
【請求項10】
請求項1〜9のいずれか一項に記載の揺動椅子において、
前記揺動機構が前記座部に連結されていること、
ならびに、前記オットマンが前記座部の揺動に連動して前記座部と一体的に揺動すること
を特徴とする揺動椅子。
【請求項11】
請求項1〜9のいずれか一項に記載の揺動椅子において、
前記揺動機構が前記オットマンに連結されていること、
ならびに、前記座部が前記オットマンの揺動に連動して前記オットマンと一体的に揺動すること
を特徴とする揺動椅子。
【請求項1】
臀部を支持する座部と、背中を支持する背もたれと、脚を支持するオットマンと、前記座部および前記オットマンの少なくとも一方を揺動させる揺動機構とを備える揺動椅子において、
前記オットマンと前記座部とが互いに連結されていること、
ならびに、前記オットマンと前記座部との相対的な姿勢を変更することができること
を特徴とする揺動椅子。
【請求項2】
請求項1に記載の揺動椅子において、
前記座部に対する前記オットマンの姿勢を変更するアクチュエータが設けられていること
を特徴とする揺動椅子。
【請求項3】
請求項1または2に記載の揺動椅子において、
前記揺動機構の揺動方向において前記座部と前記オットマンとが相対的に移動することができること
を特徴とする揺動椅子。
【請求項4】
請求項1〜3のいずれか一項に記載の揺動椅子において、
前記揺動椅子の本体に対する前記座部の座面の姿勢を変更することができること
を特徴とする揺動椅子。
【請求項5】
請求項1〜4のいずれか一項に記載の揺動椅子において、
前記座部に対する前記背もたれの姿勢を変更するアクチュエータが設けられていること
を特徴とする揺動椅子。
【請求項6】
請求項1〜5のいずれか一項に記載の揺動椅子において、
前記座部および前記背もたれおよび前記オットマンの少なくとも1つに身体を支持する凹部が設けられていること
を特徴とする揺動椅子。
【請求項7】
請求項6に記載の揺動椅子において、
前記凹部の形状を変更する変更機構が設けられていること
を特徴とする揺動椅子。
【請求項8】
請求項1〜7のいずれか一項に記載の揺動椅子において、
背中を施術する施術子が設けられていること
を特徴とする揺動椅子。
【請求項9】
請求項1〜8のいずれか一項に記載の揺動椅子において、
前記揺動機構が前記座部および前記オットマンを揺動させるときの振幅の大きさを変更することができること
を特徴とする揺動椅子。
【請求項10】
請求項1〜9のいずれか一項に記載の揺動椅子において、
前記揺動機構が前記座部に連結されていること、
ならびに、前記オットマンが前記座部の揺動に連動して前記座部と一体的に揺動すること
を特徴とする揺動椅子。
【請求項11】
請求項1〜9のいずれか一項に記載の揺動椅子において、
前記揺動機構が前記オットマンに連結されていること、
ならびに、前記座部が前記オットマンの揺動に連動して前記オットマンと一体的に揺動すること
を特徴とする揺動椅子。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−196407(P2012−196407A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−64156(P2011−64156)
【出願日】平成23年3月23日(2011.3.23)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月23日(2011.3.23)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]