
揺動構造物の動きを判定するシステム
レシーバを固定的に取り付けた揺動構造物の動きを判定するシステムを提案する。位置を把握及び固定した少なくとも3つの基準トランスミッタを設け、これらの基準トランスミッタはレシーバが受信する送信信号を規定のキャリア周波数で送信する。システムは評価装置をさらに備えるが、この評価装置は規定キャリア周波数を考慮しつつ、受信信号から測定位相値を判定する。基準トランスミッタからの距離と、レシーバの位置の変化、即ち揺動構造物の位置の変化を、前記位相値から計算することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は揺動構造物の動きを判定するシステムに関する。
【0002】
少なくとも1つの移動体の位置をリアルタイムで連続的に追跡することのできる位置決めシステムは、特許文献1から知られている。この点に関して、例えば競技場で移動するボールやプレーヤーのような物体に関する問題がある。この位置決めシステムでは、複数のレシーバを固定的に設置し、トランスミッタを物体に取り付けて、その信号をレシーバが受信し評価する。3次元の位置決めを非常に正確に行うことができるようにするには、レシーバをより高い位置に取り付ける必要があり、競技場の真上に取り付けることが最良である。従って、高い塔にレシーバを取り付けることが不可避であり、例えばサッカーの競技場の場合には投光照明塔が便利である。
【0003】
しかしこのような塔は風の影響を受けると揺れ始めることがわかっている。このような動きはトランスミッタ、即ち位置決め対象の物体とレシーバとの間の実際の測定距離に影響を及ぼす。もし塔の動きを考慮しなければ、塔の揺動が位置決め対象の物体に移行する。この点に関して、最も好ましくないケースの場合、動かない物体、例えば動いていないボールの場合では、その位置が数センチ変動してしまう。
【0004】
高い塔のような構造あるいは高層ビルの嵐や台風による動きは、GPSによる検知と評価により判定されることも知られている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】欧州特許第1556713B1号
【発明の概要】
【発明が解決しようとする課題】
【0006】
従って、本発明の基本的な目的は、レシーバを取り付けた揺動構造物の動きを判定するシステムを提供することであり、このシステムにより、構造物及びレシーバの位置の正確な変化を判定することができる。
【課題を解決するための手段】
【0007】
本発明では、主請求項の特徴による揺動構造物の動きを判定するシステムにより、この目的を達成する。
【0008】
従属請求項で示す手段により、有利な更なる展開及び改良が可能である。
【0009】
構造物の揺動を非常に正確に検知することは、少なくとも3つの基準トランスミッタを備えることで達成されるが、これらトランスミッタの各々の位置は把握及び固定しておき、その送信信号は規定のキャリア周波数を有するキャリアに変調した信号として形成する。また、評価装置は規定のキャリア周波数を考慮しつつ受信信号から位相測定値を判定して、各トランスミッタからの距離とレシーバの位置の変化、即ち揺動構造物の位置の変化を、前記位相測定値から計算することができる。かかる基準トランスミッタを3つのみ使用する場合には、全てのトランスミッタを互いに、そして更にレシーバに対して同期させること、及び/又はそれらを位相ロック式に連結することが必要である。互いに同期させた又は位相ロック式に連結した、かかるトランスミッタを4つ設ける場合には、4番目の基準トランスミッタの得た情報により、未知の受信時間をなくすことができるため、可動構造物におけるレシーバとの同期は不要である。全ての3次元情報を判定できるシステムの別の案は、同期又は位相ロック式に連結しない3つの基準トランスミッタを含むと共に、位置を把握した固定レシーバを少なくとも1つ追加的に備え、かかる固定レシーバを移動するレシーバに同期させるか、又は位相ロック式に連結させる。
【0010】
基準トランスミッタのキャリア周波数はそれぞれ異なってもよいが、全基準トランスミッタに共通したキャリア周波数に送信信号を変調することが有利である。なぜなら、それは評価に関する作業及び/又はコストを大幅に減らすことができるためである。例えば、2.4GHzのISMバンド、5GHz帯、あるいは周波数調整又は周波数分配によって利用できるその他の帯域を使用することができる。個々の基準トランスミッタを識別するための情報は、識別コードとしてビットシーケンスでキャリアに変調することができる。
【0011】
複数のレシーバを有する3次元空間において少なくとも1つの移動体の位置を判定する無線システムを較正する構成において本発明によるシステムを提供すること、または前記構成を1つの基礎的構造として統合することが特に有利であるが、その際、少なくとも1つのレシーバを揺動構造物に固定するとともに、移動体の位置を判定する際に前記構造物に固定したレシーバの位置の変化を考慮する評価装置を提供する。このように、揺動構造物の影響を調整して無線システムを較正し、非常に正確な3次元位置決めを行うことができる。レシーバ同士を互いに同期させるか、又は位相ロック式に連結することが好ましいが、使用する基準トランスミッタについては互いに同期させなくてもよいため、安価な小型の基準トランスミッタを使用することができる。
【発明を実施するための形態】
【0012】
本発明の実施形態を図面に示し、本発明を以下の記載においてより詳細に説明する。
【0013】
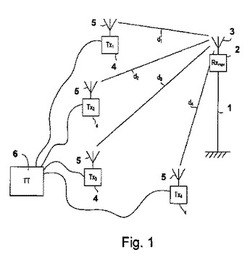
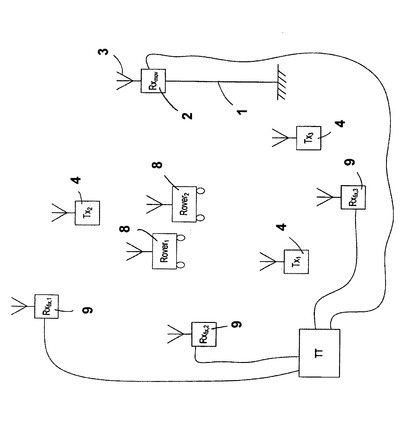
図1は、例えば塔である揺動構造物の動きを判定するシステムを示しており、揺動は環境的な影響、すなわち風又は嵐によって生じる。図1では、アンテナ3を有するレシーバ2を固定的に取り付けた塔を参照番号1で示す。塔1の周囲には、アンテナ5を有する複数の基準トランスミッタ4を配置するが、本実施形態では位置を固定して把握したトランスミッタを4つ配置している。基準トランスミッタ4は、例えば時分割多重化プロセス及び/又はコード多重化プロセスで送信信号を送るが、送信信号はキャリア周波数に変調した信号として形成する。送信帯域としては2.4GHzのISMバンドを使用することが好ましいが、5GHzのISMバンドや周波数調整又は周波数分配により利用可能なその他の帯域も使用できる。送信信号は送信バーストとして送信することが好ましく、本実施形態では全ての基準トランスミッタ4が1つのキャリア周波数を使用する。
【0014】
例えば識別コード等の関連する基準トランスミッタ4に関する情報を送信信号に含ませ、この情報をビットシーケンスとしてキャリアに変調する。基準トランスミッタ4同士を互いに同期させる、即ち、それら全てが同じ基準クロックを有するようにする。例えば光ファイバ網を介してそれらをクロックソース6に連結する、又は無線で自由に電波時計等を介して連結する。上記の記載によれば、図1に示すものは複数の方法の内の単なる一例である。
【0015】
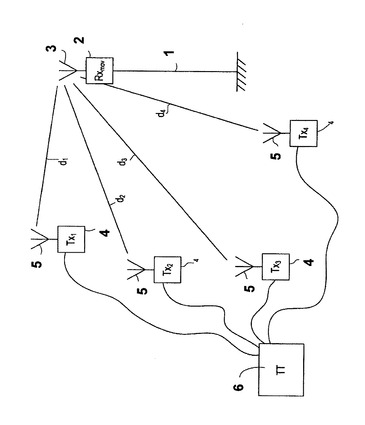
例えば、レシーバ3の受信時間を基準トランスミッタ4の送信時間と同期させれば、基準トランスミッタ4の内の1つを省略できる。この構成を図2に示すが、ここでは全てのトランスミッタ4とレシーバ3が同じクロックを有するため、最も単純なケースを評価するものである。
【0016】
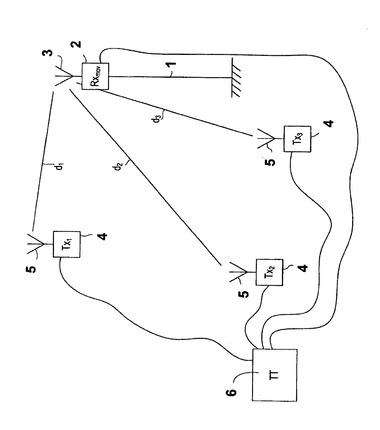
図1及び図2は共に、同期していない3つの基準トランスミッタ4と、互いに同期させた2つのレシーバ2、7(この同期はクロックソース6への接続により示される)を使用した図3の例のように変更することができる。ここで、これらのレシーバの内のレシーバ7は固定した基準位置に配置し、他方のレシーバ2については揺動構造物に配置する。
【0017】
図1から図3による実施形態では、基準トランスミッタ4が受信及び送信する送信バーストは、レシーバ2のアンテナユニットで混合されてベースバンドとなる、即ち、例えば2.4GHzのキャリアが取り除かれ、更なる処理においては基準トランスミッタ4に関する識別情報が考慮される。続いて、レシーバ2において受信したキャリアの各位相を各基準トランスミッタ4の位相と比較する、即ち、位相差を形成する。この位相差又は測定位相角は、基準トランスミッタ4とレシーバ2との各距離diと共に減少し、2πdi/λに略相当する。距離diは、最も単純なケース(図2)では次のように判定される。
【0018】
【数1】

式中、iは基準トランスミッタ4を示す添字であり、▲φ▼eiはレシーバ2で測定した位相により、そして前述の位相差の形成により判定した測定位相値をラジアンで示したものであり、λはキャリアの波長をメートルで示したものである。2.4GHzのキャリア周波数では、波長は12.27cmとなる。οiは距離のオフセットであり、これも同様にメートルで示す。
【0019】
レシーバ2がそれ自身のクロックソースを有する図1による実施形態では、距離の変化は、クロックソース6とレシーバ2のクロックソースとの周波数オフセットにより生じる。全ての基準トランスミッタ4に対して計算される距離が同様に変わるため、距離差を形成することにより、4番目の基準トランスミッタ4の情報を用いて誤差をなくすことができる。
【0020】
従って、図3による実施形態では、固定レシーバ7において判定した測定位相値と、基準トランスミッタ4とレシーバ7の間の既知の距離を用いて、送信時での基準トランスミッタ4における位相角に対して逆算を行うことができる。基準トランスミッタ4を可動レシーバ2と数学的に同期させる。その後、可動レシーバ2と基準トランスミッタ4との間の距離を計算できる。この計算は、トランスミッタ4における計算位相角、可動レシーバ2における測定位相値、及び上記式からの距離オフセットを用いて実行する。
【0021】
オフセットは、レーザ測定装置等の測定装置によって、そして基準トランスミッタ4の位置によって、そして上記式を用いた各トランスミッタ/レシーバ路の最初の位相測定によって、まず判定される。
【0022】
この初期オフセットは、様々な影響を考慮するために更なる測定過程で修正し、各最新のオフセットに適応させる。修正はシステムにおける温度ドリフトの補償、絶対位置の適応、及びいわゆる「サイクルスリップ」(2π位相ジャンプ)の修正を示す。
【0023】
システムにおいて温度が変化すると、測定する長さも変わるおそれがあるため、オフセットを適応してかかるドリフトを補償しなければならない。ドリフト、すなわち測定値からの変動はゆっくりと発生するため、実際の移動による測定値の変化にドリフトを付加し、例えばフィルタ処理により検出することができる。波長の半分を超える長さの変化に関しては、システムにおける波長が曖昧であるがゆえに位置のジャンプが生じないことが保証される。
【0024】
各オフセットοiを更にゆっくりと修正することで、レシーバ2の平均位置はレーザ測定装置の判定した位置に対応することが保証される。本発明では測定位相値を用いて作業を実行するだけであるため、絶対位置を判定することはできない。上述のように、システムの開始時に風の影響なく判定した、システムですでに把握している位置を始点とする。しかし、この方法では、レシーバ2の実際の位置がシステム開始時にこの既知の位置と大幅に異なる場合には、より大きな誤差が生じる結果となる。測定の平均値に基づいてこの既知の位置の方向において測定位置を更新することで、修正を行う。この修正では、塔がその「静止位置」を中心として振動することを利用する。この手順により、複雑な方法で及び/又は高い費用をかけて絶対位置を判定する手間を省くことができる。
【0025】
位相値の測定では、測定位相値の2π曖昧性により上記式の解も同様に曖昧であること、即ち、測定距離の変化により、既に述べたように2πの値を有するジャンプが位相測定毎に発生する可能性があることに留意されたい。これらを補償しなければ、測定距離は一定の波長分変化するため、実質的に位置が変化することになる。距離は測定位相値(メートル表記)とオフセットの合計に相当するため、オフセットの更なる修正を実行することで、距離の急激な変化を防止する。オフセットはバースト毎に一定の波長分変化して測定で生じる位相の変化を補償するため、これはもはやゆっくりと修正を行うケースではない。この補償は、オフセットにおいて実行される相対的な測定位相値の、いわゆる位相接続法により行うものである。
【0026】
レシーバ2から離れた場所に配置された、距離diの測定結果が送信されるコンピュータ等の評価装置では、塔1又はレシーバ2の位置が周期的又は連続的に判定される。測定位相値は評価装置に当然送信することができ、対応する位置は上記式を用いて判定される。通常、評価にはカルマンフィルタを用いるが、例えばバンクロフトアルゴリズム等の代数的アルゴリズムや、神経回路網もしくはパーティクルフィルタ等、その他のプロセス及び処理装置を使用してもよい。レシーバ2の位置に対する3つの座標を、評価装置が伝送する。
【0027】
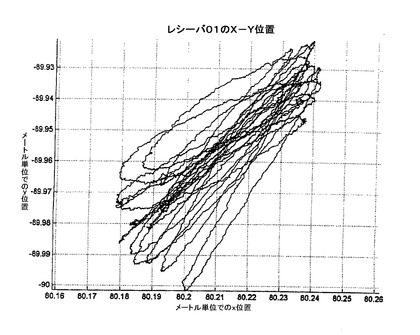
図5は、位相測定により判定した塔1の位置の、選択した座標系におけるX及びY位置の上面図である。塔の動きの揺動を明確に認識できる。
【0028】
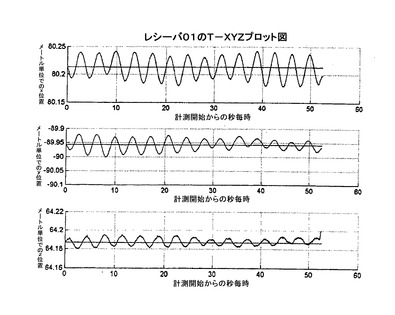
図6では、個々の座標軸の位置を時間的に展開して示しており、中央のラインは各々レーザ測定によって最初に判定した塔の位置を示している。しかし、Z座標上に認識される剰余揺動は物理的には存在しない;可動レシーバ2に対する基準トランスミッタ4の配置により誤差が生じる。レシーバ2は比較的小さい空間角で全ての基準トランスミッタ4を見るため、個々の座標軸同士の間にクロストークが生じることになる。
【0029】
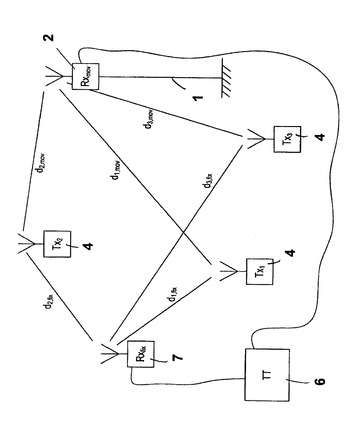
上述のように、このようなシステムあるいは方法は、1つ以上の移動体、詳細には競技場を移動するボール及び/又はプレーヤー等の1つ以上の物体を非常に正確に3次元的に位置決めするための構成とともに使用することができる。かかるシステムを図4に示す。2つの移動体は例えばトランスミッタ8を備え、複数のレシーバ9、2を競技場周辺又は競技場の上に配置し、レシーバの内の少なくとも一部、本実施形態ではレシーバ2を例えば投光照明塔に取り付ける。このシステムでは、競技場近くに固定した基準トランスミッタ4を配置し、投光照明塔に固定するレシーバはレシーバ2に対応し、レシーバ9は図3のレシーバ7に対応するものとする。各移動体のトランスミッタ8はレシーバ2、9に無線信号を送り、評価装置において受信信号を評価して移動体の位置を判定するが、この評価装置は、動いている塔1の位置を判定する上記の評価装置に対応することができる。移動体の位置を判定するための評価を行う際には、図5及び図6によるレシーバ2の揺動も考慮し、これに対応して移動体の位置を修正する。ここで示す位置決めシステムではレシーバを互いに同期させるが、これについてはクロックソース6への接続ラインで示している。塔1の揺動動作を判定する位置決めシステムに統合したシステムは、位置決めシステムを較正する基盤として機能するため、精度が増す。小さく安価な小型トランスミッタを互いに接続させることなく基準トランスミッタ4として使用することができる。
【0030】
塔若しくはビルの揺動を判定する別の実施形態では、上述のように、個々の座標の位置展開から揺動を計算するが、このことは気象の状態が様々となる状況下で必要である。
【図面の簡単な説明】
【0031】
【図1】本発明によるシステムの第1実施形態の概略図である。
【図2】本発明によるシステムの第2実施形態の概略図である。
【図3】本発明によるシステムの第3実施形態の概略図である。
【図4】本発明による第3実施形態のシステムを位置決めシステムに統合したものの概略図である。
【図5】投光照明塔の判定された位置のX−Y座標系における上面図である。
【図6】投光照明塔のX位置、Y位置、およびZ位置を示す図である。
【符号の説明】
【0032】
1 塔
2 レシーバ
3、5 アンテナ
4 基準トランスミッタ
6 クロックソース
8 トランスミッタ
7、9 固定レシーバ
【技術分野】
【0001】
本発明は揺動構造物の動きを判定するシステムに関する。
【0002】
少なくとも1つの移動体の位置をリアルタイムで連続的に追跡することのできる位置決めシステムは、特許文献1から知られている。この点に関して、例えば競技場で移動するボールやプレーヤーのような物体に関する問題がある。この位置決めシステムでは、複数のレシーバを固定的に設置し、トランスミッタを物体に取り付けて、その信号をレシーバが受信し評価する。3次元の位置決めを非常に正確に行うことができるようにするには、レシーバをより高い位置に取り付ける必要があり、競技場の真上に取り付けることが最良である。従って、高い塔にレシーバを取り付けることが不可避であり、例えばサッカーの競技場の場合には投光照明塔が便利である。
【0003】
しかしこのような塔は風の影響を受けると揺れ始めることがわかっている。このような動きはトランスミッタ、即ち位置決め対象の物体とレシーバとの間の実際の測定距離に影響を及ぼす。もし塔の動きを考慮しなければ、塔の揺動が位置決め対象の物体に移行する。この点に関して、最も好ましくないケースの場合、動かない物体、例えば動いていないボールの場合では、その位置が数センチ変動してしまう。
【0004】
高い塔のような構造あるいは高層ビルの嵐や台風による動きは、GPSによる検知と評価により判定されることも知られている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】欧州特許第1556713B1号
【発明の概要】
【発明が解決しようとする課題】
【0006】
従って、本発明の基本的な目的は、レシーバを取り付けた揺動構造物の動きを判定するシステムを提供することであり、このシステムにより、構造物及びレシーバの位置の正確な変化を判定することができる。
【課題を解決するための手段】
【0007】
本発明では、主請求項の特徴による揺動構造物の動きを判定するシステムにより、この目的を達成する。
【0008】
従属請求項で示す手段により、有利な更なる展開及び改良が可能である。
【0009】
構造物の揺動を非常に正確に検知することは、少なくとも3つの基準トランスミッタを備えることで達成されるが、これらトランスミッタの各々の位置は把握及び固定しておき、その送信信号は規定のキャリア周波数を有するキャリアに変調した信号として形成する。また、評価装置は規定のキャリア周波数を考慮しつつ受信信号から位相測定値を判定して、各トランスミッタからの距離とレシーバの位置の変化、即ち揺動構造物の位置の変化を、前記位相測定値から計算することができる。かかる基準トランスミッタを3つのみ使用する場合には、全てのトランスミッタを互いに、そして更にレシーバに対して同期させること、及び/又はそれらを位相ロック式に連結することが必要である。互いに同期させた又は位相ロック式に連結した、かかるトランスミッタを4つ設ける場合には、4番目の基準トランスミッタの得た情報により、未知の受信時間をなくすことができるため、可動構造物におけるレシーバとの同期は不要である。全ての3次元情報を判定できるシステムの別の案は、同期又は位相ロック式に連結しない3つの基準トランスミッタを含むと共に、位置を把握した固定レシーバを少なくとも1つ追加的に備え、かかる固定レシーバを移動するレシーバに同期させるか、又は位相ロック式に連結させる。
【0010】
基準トランスミッタのキャリア周波数はそれぞれ異なってもよいが、全基準トランスミッタに共通したキャリア周波数に送信信号を変調することが有利である。なぜなら、それは評価に関する作業及び/又はコストを大幅に減らすことができるためである。例えば、2.4GHzのISMバンド、5GHz帯、あるいは周波数調整又は周波数分配によって利用できるその他の帯域を使用することができる。個々の基準トランスミッタを識別するための情報は、識別コードとしてビットシーケンスでキャリアに変調することができる。
【0011】
複数のレシーバを有する3次元空間において少なくとも1つの移動体の位置を判定する無線システムを較正する構成において本発明によるシステムを提供すること、または前記構成を1つの基礎的構造として統合することが特に有利であるが、その際、少なくとも1つのレシーバを揺動構造物に固定するとともに、移動体の位置を判定する際に前記構造物に固定したレシーバの位置の変化を考慮する評価装置を提供する。このように、揺動構造物の影響を調整して無線システムを較正し、非常に正確な3次元位置決めを行うことができる。レシーバ同士を互いに同期させるか、又は位相ロック式に連結することが好ましいが、使用する基準トランスミッタについては互いに同期させなくてもよいため、安価な小型の基準トランスミッタを使用することができる。
【発明を実施するための形態】
【0012】
本発明の実施形態を図面に示し、本発明を以下の記載においてより詳細に説明する。
【0013】
図1は、例えば塔である揺動構造物の動きを判定するシステムを示しており、揺動は環境的な影響、すなわち風又は嵐によって生じる。図1では、アンテナ3を有するレシーバ2を固定的に取り付けた塔を参照番号1で示す。塔1の周囲には、アンテナ5を有する複数の基準トランスミッタ4を配置するが、本実施形態では位置を固定して把握したトランスミッタを4つ配置している。基準トランスミッタ4は、例えば時分割多重化プロセス及び/又はコード多重化プロセスで送信信号を送るが、送信信号はキャリア周波数に変調した信号として形成する。送信帯域としては2.4GHzのISMバンドを使用することが好ましいが、5GHzのISMバンドや周波数調整又は周波数分配により利用可能なその他の帯域も使用できる。送信信号は送信バーストとして送信することが好ましく、本実施形態では全ての基準トランスミッタ4が1つのキャリア周波数を使用する。
【0014】
例えば識別コード等の関連する基準トランスミッタ4に関する情報を送信信号に含ませ、この情報をビットシーケンスとしてキャリアに変調する。基準トランスミッタ4同士を互いに同期させる、即ち、それら全てが同じ基準クロックを有するようにする。例えば光ファイバ網を介してそれらをクロックソース6に連結する、又は無線で自由に電波時計等を介して連結する。上記の記載によれば、図1に示すものは複数の方法の内の単なる一例である。
【0015】
例えば、レシーバ3の受信時間を基準トランスミッタ4の送信時間と同期させれば、基準トランスミッタ4の内の1つを省略できる。この構成を図2に示すが、ここでは全てのトランスミッタ4とレシーバ3が同じクロックを有するため、最も単純なケースを評価するものである。
【0016】
図1及び図2は共に、同期していない3つの基準トランスミッタ4と、互いに同期させた2つのレシーバ2、7(この同期はクロックソース6への接続により示される)を使用した図3の例のように変更することができる。ここで、これらのレシーバの内のレシーバ7は固定した基準位置に配置し、他方のレシーバ2については揺動構造物に配置する。
【0017】
図1から図3による実施形態では、基準トランスミッタ4が受信及び送信する送信バーストは、レシーバ2のアンテナユニットで混合されてベースバンドとなる、即ち、例えば2.4GHzのキャリアが取り除かれ、更なる処理においては基準トランスミッタ4に関する識別情報が考慮される。続いて、レシーバ2において受信したキャリアの各位相を各基準トランスミッタ4の位相と比較する、即ち、位相差を形成する。この位相差又は測定位相角は、基準トランスミッタ4とレシーバ2との各距離diと共に減少し、2πdi/λに略相当する。距離diは、最も単純なケース(図2)では次のように判定される。
【0018】
【数1】
式中、iは基準トランスミッタ4を示す添字であり、▲φ▼eiはレシーバ2で測定した位相により、そして前述の位相差の形成により判定した測定位相値をラジアンで示したものであり、λはキャリアの波長をメートルで示したものである。2.4GHzのキャリア周波数では、波長は12.27cmとなる。οiは距離のオフセットであり、これも同様にメートルで示す。
【0019】
レシーバ2がそれ自身のクロックソースを有する図1による実施形態では、距離の変化は、クロックソース6とレシーバ2のクロックソースとの周波数オフセットにより生じる。全ての基準トランスミッタ4に対して計算される距離が同様に変わるため、距離差を形成することにより、4番目の基準トランスミッタ4の情報を用いて誤差をなくすことができる。
【0020】
従って、図3による実施形態では、固定レシーバ7において判定した測定位相値と、基準トランスミッタ4とレシーバ7の間の既知の距離を用いて、送信時での基準トランスミッタ4における位相角に対して逆算を行うことができる。基準トランスミッタ4を可動レシーバ2と数学的に同期させる。その後、可動レシーバ2と基準トランスミッタ4との間の距離を計算できる。この計算は、トランスミッタ4における計算位相角、可動レシーバ2における測定位相値、及び上記式からの距離オフセットを用いて実行する。
【0021】
オフセットは、レーザ測定装置等の測定装置によって、そして基準トランスミッタ4の位置によって、そして上記式を用いた各トランスミッタ/レシーバ路の最初の位相測定によって、まず判定される。
【0022】
この初期オフセットは、様々な影響を考慮するために更なる測定過程で修正し、各最新のオフセットに適応させる。修正はシステムにおける温度ドリフトの補償、絶対位置の適応、及びいわゆる「サイクルスリップ」(2π位相ジャンプ)の修正を示す。
【0023】
システムにおいて温度が変化すると、測定する長さも変わるおそれがあるため、オフセットを適応してかかるドリフトを補償しなければならない。ドリフト、すなわち測定値からの変動はゆっくりと発生するため、実際の移動による測定値の変化にドリフトを付加し、例えばフィルタ処理により検出することができる。波長の半分を超える長さの変化に関しては、システムにおける波長が曖昧であるがゆえに位置のジャンプが生じないことが保証される。
【0024】
各オフセットοiを更にゆっくりと修正することで、レシーバ2の平均位置はレーザ測定装置の判定した位置に対応することが保証される。本発明では測定位相値を用いて作業を実行するだけであるため、絶対位置を判定することはできない。上述のように、システムの開始時に風の影響なく判定した、システムですでに把握している位置を始点とする。しかし、この方法では、レシーバ2の実際の位置がシステム開始時にこの既知の位置と大幅に異なる場合には、より大きな誤差が生じる結果となる。測定の平均値に基づいてこの既知の位置の方向において測定位置を更新することで、修正を行う。この修正では、塔がその「静止位置」を中心として振動することを利用する。この手順により、複雑な方法で及び/又は高い費用をかけて絶対位置を判定する手間を省くことができる。
【0025】
位相値の測定では、測定位相値の2π曖昧性により上記式の解も同様に曖昧であること、即ち、測定距離の変化により、既に述べたように2πの値を有するジャンプが位相測定毎に発生する可能性があることに留意されたい。これらを補償しなければ、測定距離は一定の波長分変化するため、実質的に位置が変化することになる。距離は測定位相値(メートル表記)とオフセットの合計に相当するため、オフセットの更なる修正を実行することで、距離の急激な変化を防止する。オフセットはバースト毎に一定の波長分変化して測定で生じる位相の変化を補償するため、これはもはやゆっくりと修正を行うケースではない。この補償は、オフセットにおいて実行される相対的な測定位相値の、いわゆる位相接続法により行うものである。
【0026】
レシーバ2から離れた場所に配置された、距離diの測定結果が送信されるコンピュータ等の評価装置では、塔1又はレシーバ2の位置が周期的又は連続的に判定される。測定位相値は評価装置に当然送信することができ、対応する位置は上記式を用いて判定される。通常、評価にはカルマンフィルタを用いるが、例えばバンクロフトアルゴリズム等の代数的アルゴリズムや、神経回路網もしくはパーティクルフィルタ等、その他のプロセス及び処理装置を使用してもよい。レシーバ2の位置に対する3つの座標を、評価装置が伝送する。
【0027】
図5は、位相測定により判定した塔1の位置の、選択した座標系におけるX及びY位置の上面図である。塔の動きの揺動を明確に認識できる。
【0028】
図6では、個々の座標軸の位置を時間的に展開して示しており、中央のラインは各々レーザ測定によって最初に判定した塔の位置を示している。しかし、Z座標上に認識される剰余揺動は物理的には存在しない;可動レシーバ2に対する基準トランスミッタ4の配置により誤差が生じる。レシーバ2は比較的小さい空間角で全ての基準トランスミッタ4を見るため、個々の座標軸同士の間にクロストークが生じることになる。
【0029】
上述のように、このようなシステムあるいは方法は、1つ以上の移動体、詳細には競技場を移動するボール及び/又はプレーヤー等の1つ以上の物体を非常に正確に3次元的に位置決めするための構成とともに使用することができる。かかるシステムを図4に示す。2つの移動体は例えばトランスミッタ8を備え、複数のレシーバ9、2を競技場周辺又は競技場の上に配置し、レシーバの内の少なくとも一部、本実施形態ではレシーバ2を例えば投光照明塔に取り付ける。このシステムでは、競技場近くに固定した基準トランスミッタ4を配置し、投光照明塔に固定するレシーバはレシーバ2に対応し、レシーバ9は図3のレシーバ7に対応するものとする。各移動体のトランスミッタ8はレシーバ2、9に無線信号を送り、評価装置において受信信号を評価して移動体の位置を判定するが、この評価装置は、動いている塔1の位置を判定する上記の評価装置に対応することができる。移動体の位置を判定するための評価を行う際には、図5及び図6によるレシーバ2の揺動も考慮し、これに対応して移動体の位置を修正する。ここで示す位置決めシステムではレシーバを互いに同期させるが、これについてはクロックソース6への接続ラインで示している。塔1の揺動動作を判定する位置決めシステムに統合したシステムは、位置決めシステムを較正する基盤として機能するため、精度が増す。小さく安価な小型トランスミッタを互いに接続させることなく基準トランスミッタ4として使用することができる。
【0030】
塔若しくはビルの揺動を判定する別の実施形態では、上述のように、個々の座標の位置展開から揺動を計算するが、このことは気象の状態が様々となる状況下で必要である。
【図面の簡単な説明】
【0031】
【図1】本発明によるシステムの第1実施形態の概略図である。
【図2】本発明によるシステムの第2実施形態の概略図である。
【図3】本発明によるシステムの第3実施形態の概略図である。
【図4】本発明による第3実施形態のシステムを位置決めシステムに統合したものの概略図である。
【図5】投光照明塔の判定された位置のX−Y座標系における上面図である。
【図6】投光照明塔のX位置、Y位置、およびZ位置を示す図である。
【符号の説明】
【0032】
1 塔
2 レシーバ
3、5 アンテナ
4 基準トランスミッタ
6 クロックソース
8 トランスミッタ
7、9 固定レシーバ
【特許請求の範囲】
【請求項1】
レシーバ(2)を固定的に取り付けた揺動構造物の動きを判定するシステムであって、
少なくとも3つの基準トランスミッタ(4)の位置をそれぞれ把握及び固定し、前記基準トランスミッタ(4)の送信信号は規定のキャリア周波数を有するキャリアに変調した信号として形成し、
前記規定のキャリア周波数を考慮しつつ、前記レシーバ(2)が受信した個々の前記基準トランスミッタ(4)の前記送信信号から測定位相値を判定するよう評価装置を構成し、前記基準トランスミッタ(4)からの各距離と、前記レシーバ(2)の位置の変化、即ち前記揺動構造物の位置の変化を、前記測定位相値から計算できること、
を特徴とするシステム。
【請求項2】
基準トランスミッタ(4)全てに、共通の規定キャリア周波数を対応づけること、を特徴とする請求項1に記載のシステム。
【請求項3】
前記レシーバ(2)と前記各基準トランスミッタ(4)の間の距離を下記式
【数1】
から計算し、前記式中、dは前記各基準トランスミッタ(4)と前記レシーバ(2)との距離であり、iは前記基準トランスミッタを示す添字であり、▲φ▼eiは前記各基準トランスミッタに対して前記レシーバにおいて測定した位相値をラジアンで示したものであり、λは前記キャリアの波長をメートルで示したものであり、οiは各オフセットをメートルで示したものであること、
を特徴とする請求項1又は2のいずれかに記載のシステム。
【請求項4】
前記各オフセットをまず、測定装置により測定した前記構造物の位置と、前記固定した基準トランスミッタ(4)の位置と、最初の位相測定により判定できること、を特徴とする請求項3に記載のシステム。
【請求項5】
位置を把握した少なくとも3つの固定した基準トランスミッタ(4)と1つの前記レシーバ(2)からなる構成を時間的に同期させたこと、又は共通のクロックソース(6)を介して互いに位相ロック式に接続させたこと、を特徴とする請求項1から4のいずれか一項に記載のシステム。
【請求項6】
第4の固定した基準トランスミッタ(4)を備え、4つの該基準トランスミッタ(4)を時間的に同期させる、又は共通のクロックソース(6)を介して互いに位相ロック式に接続すること、を特徴とする請求項1から4のいずれか一項に記載のシステム。
【請求項7】
前記レシーバ(2)に加えて、位置を把握した少なくとも1つの固定レシーバ(7)を前記揺動構造物に備え、前記基準トランスミッタ(2)同士を同期させない、又は互いに位相ロック式に接続せず、前記揺動するレシーバ(2)と前記固定レシーバ(7)を同期させる、又は互いに位相ロック式に連結し、位置を把握した前記各基準トランスミッタ(2)の送信時間を、前記固定トランスミッタの各受信信号から計算できること、
を特徴とする請求項1から4のいずれか一項に記載のシステム。
【請求項8】
前記システムにおける温度の変化に前記オフセットの各値を適応するように前記評価装置を構成し、前記温度変化による前記測定値の変化をフィルタ処理により検出できること、を特徴とする請求項3から7のいずれか一項に記載のシステム。
【請求項9】
測定位置の値の平均値評価により前記各オフセット値を変化させることによって、判定の開始時に測定した位置からの前記揺動構造物の位置の可能な偏位を補償するよう、前記評価装置を構成したこと、を特徴とする請求項3から8のいずれか一項に記載のシステム。
【請求項10】
前記測定した位相値の2π位相ジャンプ補償に対して前記各オフセット値を適応するよう前記評価装置を構成し、急激な距離の変化を評価できるようにしたこと、を特徴とする請求項3から9のいずれか一項に記載のシステム。
【請求項11】
複数のレシーバ(2、9)を用いて3次元空間で少なくとも1つの可動トランスミッタ(8)の位置を判定する無線システムを較正するための構成であって、前記レシーバの内の少なくとも1つ(2)を環境的な影響により揺動する構造物に固定し、前記構成は請求項1から10のいずれか一項に記載したシステムを含み、前記可動トランスミッタ(8)の位置を判定することにおいて、前記構造物に固定した前記レシーバ(2)の位置の変化を考慮する評価装置を備えた構成。
【請求項1】
レシーバ(2)を固定的に取り付けた揺動構造物の動きを判定するシステムであって、
少なくとも3つの基準トランスミッタ(4)の位置をそれぞれ把握及び固定し、前記基準トランスミッタ(4)の送信信号は規定のキャリア周波数を有するキャリアに変調した信号として形成し、
前記規定のキャリア周波数を考慮しつつ、前記レシーバ(2)が受信した個々の前記基準トランスミッタ(4)の前記送信信号から測定位相値を判定するよう評価装置を構成し、前記基準トランスミッタ(4)からの各距離と、前記レシーバ(2)の位置の変化、即ち前記揺動構造物の位置の変化を、前記測定位相値から計算できること、
を特徴とするシステム。
【請求項2】
基準トランスミッタ(4)全てに、共通の規定キャリア周波数を対応づけること、を特徴とする請求項1に記載のシステム。
【請求項3】
前記レシーバ(2)と前記各基準トランスミッタ(4)の間の距離を下記式
【数1】
から計算し、前記式中、dは前記各基準トランスミッタ(4)と前記レシーバ(2)との距離であり、iは前記基準トランスミッタを示す添字であり、▲φ▼eiは前記各基準トランスミッタに対して前記レシーバにおいて測定した位相値をラジアンで示したものであり、λは前記キャリアの波長をメートルで示したものであり、οiは各オフセットをメートルで示したものであること、
を特徴とする請求項1又は2のいずれかに記載のシステム。
【請求項4】
前記各オフセットをまず、測定装置により測定した前記構造物の位置と、前記固定した基準トランスミッタ(4)の位置と、最初の位相測定により判定できること、を特徴とする請求項3に記載のシステム。
【請求項5】
位置を把握した少なくとも3つの固定した基準トランスミッタ(4)と1つの前記レシーバ(2)からなる構成を時間的に同期させたこと、又は共通のクロックソース(6)を介して互いに位相ロック式に接続させたこと、を特徴とする請求項1から4のいずれか一項に記載のシステム。
【請求項6】
第4の固定した基準トランスミッタ(4)を備え、4つの該基準トランスミッタ(4)を時間的に同期させる、又は共通のクロックソース(6)を介して互いに位相ロック式に接続すること、を特徴とする請求項1から4のいずれか一項に記載のシステム。
【請求項7】
前記レシーバ(2)に加えて、位置を把握した少なくとも1つの固定レシーバ(7)を前記揺動構造物に備え、前記基準トランスミッタ(2)同士を同期させない、又は互いに位相ロック式に接続せず、前記揺動するレシーバ(2)と前記固定レシーバ(7)を同期させる、又は互いに位相ロック式に連結し、位置を把握した前記各基準トランスミッタ(2)の送信時間を、前記固定トランスミッタの各受信信号から計算できること、
を特徴とする請求項1から4のいずれか一項に記載のシステム。
【請求項8】
前記システムにおける温度の変化に前記オフセットの各値を適応するように前記評価装置を構成し、前記温度変化による前記測定値の変化をフィルタ処理により検出できること、を特徴とする請求項3から7のいずれか一項に記載のシステム。
【請求項9】
測定位置の値の平均値評価により前記各オフセット値を変化させることによって、判定の開始時に測定した位置からの前記揺動構造物の位置の可能な偏位を補償するよう、前記評価装置を構成したこと、を特徴とする請求項3から8のいずれか一項に記載のシステム。
【請求項10】
前記測定した位相値の2π位相ジャンプ補償に対して前記各オフセット値を適応するよう前記評価装置を構成し、急激な距離の変化を評価できるようにしたこと、を特徴とする請求項3から9のいずれか一項に記載のシステム。
【請求項11】
複数のレシーバ(2、9)を用いて3次元空間で少なくとも1つの可動トランスミッタ(8)の位置を判定する無線システムを較正するための構成であって、前記レシーバの内の少なくとも1つ(2)を環境的な影響により揺動する構造物に固定し、前記構成は請求項1から10のいずれか一項に記載したシステムを含み、前記可動トランスミッタ(8)の位置を判定することにおいて、前記構造物に固定した前記レシーバ(2)の位置の変化を考慮する評価装置を備えた構成。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2012−506032(P2012−506032A)
【公表日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2011−531409(P2011−531409)
【出願日】平成21年10月14日(2009.10.14)
【国際出願番号】PCT/EP2009/007577
【国際公開番号】WO2010/043421
【国際公開日】平成22年4月22日(2010.4.22)
【出願人】(597159765)フラウンホーファーゲゼルシャフト ツール フォルデルング デル アンゲヴァンテン フォルシユング エー.フアー. (68)
【Fターム(参考)】
【公表日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成21年10月14日(2009.10.14)
【国際出願番号】PCT/EP2009/007577
【国際公開番号】WO2010/043421
【国際公開日】平成22年4月22日(2010.4.22)
【出願人】(597159765)フラウンホーファーゲゼルシャフト ツール フォルデルング デル アンゲヴァンテン フォルシユング エー.フアー. (68)
【Fターム(参考)】
[ Back to top ]