
揺動特徴推定装置
【課題】建造物本体の揺動の特徴を容易かつ高精度に推定することができる揺動特徴推定装置を提供する。
【解決手段】建造物本体に含まれる建造物本体16の下面に固定された振り下げ36と、基礎14に設けられ、振り下げ36の磁場の強さを測定する測定送信装置38と、測定送信装置38の測定結果に基づいて建造物本体の揺動の特徴を示す揺動特徴情報を導出するCPU34Aと、を有する。
【解決手段】建造物本体に含まれる建造物本体16の下面に固定された振り下げ36と、基礎14に設けられ、振り下げ36の磁場の強さを測定する測定送信装置38と、測定送信装置38の測定結果に基づいて建造物本体の揺動の特徴を示す揺動特徴情報を導出するCPU34Aと、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、免震装置を有する建造物に対して適用される揺動特徴推定装置に関する。
【背景技術】
【0002】
免震装置を有する建造物において、例えば地震などにより建造物が大きく揺れた場合、建造物の基礎と免震装置上の建造物本体とで大きな相対変形が生じる。免震装置を有する建造物については、建造物の変形状態を記録しておくことが推奨されており、地盤に接している建造物の基礎上に台紙を設置し、その上に地震時の軌跡を描く方式(罫書き方式)が一般的である。
【0003】
罫書き方式の他にも例えば特許文献1には、免震装置を有する建造物に含まれる建造物本体の地震時の水平方向の揺動量をスライド部材を用いて計測する発明が開示されている。この発明は、地震発生時に滑り部分が非滑り部分の上又は下を水平方向に摺動することに伴ってスライド部材をスライドさせることにより水平方向の揺動量を記録するものである。スライド部材は地震が収まった後もその位置に停止するので、スライド部材のスライド量がどの程度なのかを目盛りで確認することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−38804号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、罫書き方式の場合、台紙に軌跡が描かれた後に台紙を新しいものに交換しなければならない上、台紙に描かれた軌跡から揺動量を計算しなればならなかった。また、特許文献1に記載の技術は、揺動量を計測した後、スライド部材を含む装置一式を取り換えなければならない上、揺動量を目盛りから読み取らなければならなかった。このように、従来の手法で免震装置を有する建造物に含まれる建造物本体の揺動量を推定する場合、手間がかかる割に高精度な推定が困難である、という問題点があった。
【0006】
本発明は上記問題点を解決するために成されたものであり、建造物本体の揺動の特徴を容易かつ高精度に推定することができる揺動特徴推定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載の揺動特徴推定装置を、基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、前記建造物本体及び前記基礎の他方に設けられ、前記磁場発生体によって発生した磁場の強さを測定する測定手段と、前記測定手段の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、を含んで構成した。
【0008】
請求項1に記載の揺動特徴推定装置を、請求項2に記載の発明のように、前記揺動特徴情報を、前記磁場発生体の揺動範囲を特定する情報に対応する情報としたものとした。
【0009】
一方、上記目的を達成するために、請求項3に記載の揺動特徴推定装置を、基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、各々前記建造物本体及び前記基礎の他方に対して設けられ、前記磁場発生体によって発生した磁場の強さを測定する複数の測定手段と、前記複数の測定手段の各々の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、を含んで構成した。
【0010】
請求項3に記載の揺動特徴推定装置を、請求項4に記載の発明のように、前記揺動特徴情報を、前記磁場発生体の位置を特定する情報に対応する情報としたものとした。
【0011】
請求項1〜請求項4の何れか1項に記載の揺動特徴推定装置を、請求項5に記載の発明のように、前記磁場発生体と、前記測定手段に近接させるように該磁場発生体を支持する支持体と、を含んで構成された振り下げを含むものとした。
【発明の効果】
【0012】
請求項1及び請求項3に記載の発明によれば、本構成を有しない場合に比べ、建造物本体の揺動の特徴を容易かつ高精度に推定することができる、という効果が得られる。
【0013】
請求項2に記載の発明によれば、揺動特徴情報を、磁場発生体の揺動範囲を特定する情報に対応する情報とした構成を有しない場合に比べ、建造物本体の揺動範囲を高精度かつ容易に把握することができる、という効果が得られる。
【0014】
請求項4に記載の発明によれば、揺動特徴情報を、磁場発生体の位置を特定する情報に対応する情報とした構成を有しない場合に比べ、建造物本体の揺動経路を高精度かつ容易に把握することができる、という効果が得られる。
【0015】
請求項5に記載の発明によれば、前記磁場発生体と、前記測定手段に近接させるように該磁場発生体を支持する支持体と、を含んで構成された振り下げを有しない場合に比べ、磁場の強さを容易かつ正確に測定することができる、という効果が得られる。
【図面の簡単な説明】
【0016】
【図1】第1の実施の形態に係る揺動特徴推定装置が適用された鉄筋コンクリート造の建造物の一例を示す立面図である。
【図2】第1の実施の形態に係る揺動特徴推定装置の構成の一例を示す概略構成図である。
【図3】第1の実施の形態に係る揺動特徴推定装置の電気系の要部構成の一例を示すブロック図である。
【図4】第1の実施の形態に係る推定部のROMに記憶されている建造物本体揺動量導出テーブルの一例を示す模式図である。
【図5】第1の実施の形態に係る揺動特徴推定処理プログラムの処理の流れの異例を示すフローチャートである。
【図6】第1の実施の形態に係る推定部の二次記憶部に導出時刻毎に揺動量が対応付けられて記憶された一例を示す模式図である。
【図7】第1の実施の形態に係る推定部のROMに記憶されている振り下げ揺動量導出テーブルの一例を示す模式図である。
【図8】第2の実施の形態に係る揺動特徴推定装置の構成の一例を示す概略構成図である。
【図9】第2の実施の形態に係る揺動特徴推定装置に含まれる測定送信装置群の配置例を示す概略平面図である。
【図10】第2の実施の形態に係る揺動特徴推定処理プログラムの処理の流れの異例を示すフローチャートである。
【図11】ビオ・サバールの法則の説明に供する説明図である。
【図12】第2の実施の形態に係る推定部の二次記憶部に推定時刻毎に揺動位置が対応付けられて記憶された一例を示す模式図である。
【図13】第2の実施の形態に係る推定部のディスプレイに表示された建造物の揺動経路を表す軌跡の一例を示す画面図である。
【図14】実施の形態に係る揺動特徴推定装置の変形例を示す概略構成図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して、本発明を実施するための形態の一例について詳細に説明する。なお、以下の実施の形態では、免震装置を有する鉄筋コンクリート造の建造物に本発明を適用した例を示すが、鉄骨造、鉄筋コンクリート造、CFT造(Concrete-Filled Steel Tube:充填形鋼管コンクリート構造)、それらの混合構造など、免震装置を有する様々な構造や規模の構造物に対して適用することができる。
【0018】
[第1の実施の形態]
【0019】
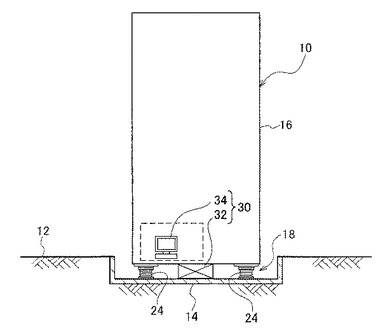
図1は、鉄筋コンクリート造の建造物10の一例を示す立面図である。図1に示すように、建造物10は、地盤12上に設けられた下部構造物としての鉄筋コンクリート造の基礎14と、上部構造物としての鉄筋コンクリート造の建造物本体16と、基礎14と建造物本体16との間に挿入された免震装置18と、を含んで構成されている。免震装置18は、鉛プラグ入りの複数の積層ゴム体24を含んで構成されている。
【0020】
積層ゴム体24は、円盤状のゴム体と円盤状の鋼製の板部材とを交互に複数積層して形成されており、平面視にてゴム体及び板部材の略中央に形成された孔に圧入された円柱状の鉛プラグの塑性変形によって減衰機能を発揮する。
【0021】
上記のように構成された建造物10は、揺動特徴推定装置30を含んで構成されている。揺動特徴推定装置30は、基礎14と建造物本体16との間に配置され、建造物本体16の水平方向に対する揺動(以下、「建造物本体16の揺動」という。)の特徴を推定するために要する物理量を測定する測定部32と、建造物10の一室に設置されており、測定部32での測定結果に基づいて建造物本体16の揺動の特徴を推定する推定部34と、を含んで構成されている。
【0022】
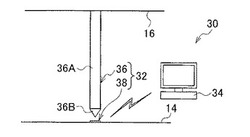
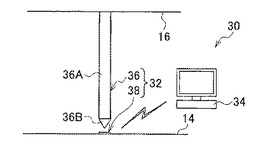
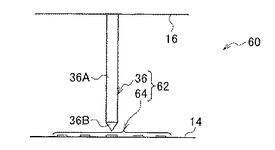
図2は、本第1の実施の形態に係る揺動特徴推定装置30の構成の一例を示す概略構成図である。図2に示すように、測定部32は、振り下げ36及び測定送信装置38を含んで構成されている。振り下げ36は、鉄を材料として形成された円柱状の鉄棒36A及び鉄棒36Aの先端面に固定された永久磁石36Bを含んで構成されている。鉄棒36Aの基端は建造物本体16の下面に固定されている。永久磁石36Bは先細りした形状(一例として円錐状)に形成されており、その底面が鉄棒36Aの先端面に固定され、これによって永久磁石36Bは鉄棒36Aに支持される。測定送信装置38は、振り下げ36に含まれる永久磁石36Bによって発生する磁場の強さを測定すると共に測定結果を所定の送信先に無線送信するものであり、振り下げ36の先端(一例として円錐状の永久磁石36Bの頂点)の真下に位置すると共に振り下げ36の先端に近接するように基礎14の上面に設置されている。なお、ここで言う「近接」とは、例えば測定送信装置38により所定の磁場の強さが測定可能となる間隔で振り下げ36の先端と離れているということであり、具体的には測定送信装置38の測定面から振り下げ36の先端まで所定距離(例えば80mm)離れていることを意味する。
【0023】
推定部34は、測定送信装置38の無線送信先である。本第1の実施の形態では、推定部34として、測定送信装置38との間で通信(無線通信又は有線通信)可能なパーソナル・コンピュータを適用しているが、これに限らず、例えばマイクロコンピュータであっても良く、後述する揺動推定処理プログラムを実行することができるコンピュータを備えたものであれば代替可能である。
【0024】
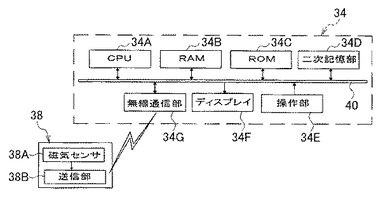
図3は、本第1の実施の形態に係る推定部34及び測定送信装置38の電気系の要部構成の一例を示すブロック図である。図3に示すように、推定部34は、推定部34全体の動作を司るCPU(Central Processing Unit:中央処理装置)34Aと、CPU34Aによる各種処理プログラムの実行時のワークエリア等として用いられるRAM(Random Access Memory)34Bと、各種制御プログラムや各種パラメータ等が予め記憶されたROM(Read Only Memory)34Cと、各種情報を記憶するために用いられる記憶手段としての二次記憶部(一例としてハードディスク装置)34Dと、各種情報を入力するために操作される操作部(一例としてマウス及びキーボード)34Eと、各種情報を表示するために用いられるディスプレイ(一例として液晶ディスプレイ)34Fと、測定送信装置38との間での無線通信動作を制御する無線通信部34Gと、が備えられており、これら各部はアドレスバス、データバス、及び制御バス等のバス40を介して互いに電気的に接続されている。
【0025】
従って、CPU34Aは、RAM34B、ROM34C及び二次記憶部34Dに対するアクセス、操作部34Eを介した各種情報の取得、ディスプレイ34Fに対する各種情報の表示、並びに無線通信部34Gを介した測定送信装置38との間の各種情報の授受を各々行うことができる。
【0026】
一方、測定送信装置38は、永久磁石36Bによって発生する磁場の強さを測定する磁気センサ38Aと、磁気センサ38Aにより測定された磁場の強さを示す情報(一例として電圧信号)を推定部34の無線通信部34Gに対して無線通信により所定時間(例えば0.1秒)毎に送信する送信部38Bとを備えている。
【0027】
本第1の実施の形態に係る磁気センサ38Aは、アモルファス磁性金属ワイヤのMI効果(Magnet-Impedance Effect)を応用した磁気センサである。アモルファスとは、非晶質という意味であり、通常の金属とは異なって結晶構造を持たず、内部構造が一様で理想的な軟磁気特性を示す。MI効果とは、アモルファス磁性金属ワイヤにパルス電流を流したときのインピーダンスが微小な外部磁界により極めて大きな変化を示す現象を指す。本第1の実施の形態に係る磁気センサ38Aは、外部磁界(外部磁場)の強さを測定するセンサとして使用され、アモルファス磁性金属ワイヤのインピーダンスに対応する電圧信号を出力する。
【0028】
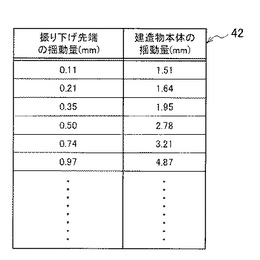
ところで、本第1の実施の形態に係る揺動特徴推定装置30では、磁気センサ38Aによって測定された磁場の強さに基づいて振り下げ36の先端の揺動量を導出し、導出した振り下げ36の先端の揺動量に基づいて建造物本体16の揺動量を推定する揺動量推定機能を有している。この揺動量推定機能を実現するために、本第1の実施の形態に係る推定部34のROM34Bには一例として図4に示す建造物本体揺動量導出テーブル42が予め記憶されている。一例として図4に示すように、建造物本体揺動量導出テーブル42は、振り下げ36が静止している状態(以下、「初期状態」という。)のときの振り下げ36の先端の位置を基準位置とした場合の基準位置からのずれ量である振り下げ36の先端の揺動量と振り下げ36の先端の揺動量に対して一意に定められた建造物10の揺動の特徴を示す揺動特徴情報の一例である建造物本体16の揺動量(建造物本体16の初期状態時の静止位置からのずれ量)とが対応付けられて構成されている。なお、ここでは、建造物本体16の揺動量として、種々の条件下で各々繰り返し行われたコンピュータ・シミュレーションや実験などによって予め得られた値を適用している。
【0029】
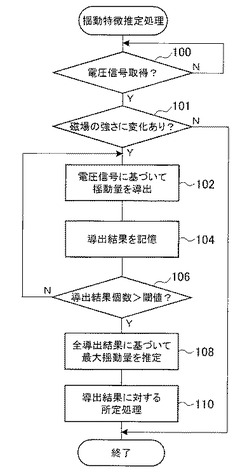
次に、本第1の実施の形態に係る揺動特徴推定装置30の作用として、図5を参照して、揺動特徴推定処理を実行する際の揺動特徴推定装置30の作用を説明する。なお、図5は、推定部34の操作部34Eを介して揺動特徴推定処理を実行する旨の指示入力が行われた際に推定部34のCPU34Aによって実行される揺動特徴推定処理プログラムの処理の流れの一例を示すフローチャートであり、このプログラムは二次記憶部34Dの所定領域に予め記憶されている。
【0030】
図5のステップ100では、測定送信装置38から送信された電圧信号を受信(取得)するまで待機する。ステップ100において電圧信号が取得されると肯定判定となってステップ101に移行する。ステップ101では、磁気センサ38Aによって測定された磁場の強さが初期状態時に測定された磁場の強さから変化したか否かを判定し、否定判定となった場合には本揺動特徴推定処理プログラムを終了する一方、肯定判定となった場合にはステップ102に移行する。
【0031】
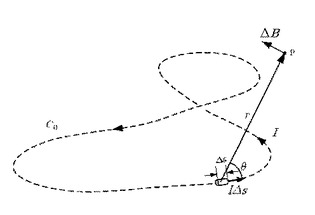
ステップ102では、上記ステップ100の処理で取得された電圧信号に基づいて建造物本体16の揺動量を導出する。本ステップ102では、例えば、電圧信号の信号レベルから一意に定まる磁場の強さ及び磁場の強さの測定時に磁気センサ38Aに流れる電流値からビオ・サバールの法則を用いて逆問題を解くことにより、振り下げ36の先端の初期状態時の位置からの揺動量を算出する。そして、算出した揺動量に対して1対1で予め対応付けられた建造物本体16の揺動量を建造物本体揺動量導出テーブル42から導出する。なお、ビオ・サバールの法則とは、下記の(1)式で表される法則のこと言う。(1)式は、一例として図11に示すように、電流の微小部分がある点(ここでは点Pという)に作る磁場の強さ(磁場の大きさ)が、電流値I、その微小部分の長さΔs、及び電流の方向と点Pの方向とのなす角θの正弦に比例し、点Pまでの距離rの二乗に反比例することを示している。なお、(1)式において、Bは磁場の強さを示し、μ0/4πは比例定数を示している。
【0032】
ΔB=(μ0/4π)・(IΔs・sinθ/r2)・・・・(1)
【0033】
なお、本第1の実施の形態では、上記ステップ102の処理として、建造物本体揺動量導出テーブル42から建造物本体16の揺動量を導出する処理の形態例を挙げているが、これに限らず、例えば振り下げ36の高さに対する太さ(例えば外径)の割合が非常に大きいなどの振り下げ36の剛性が無視できる理由があれば、振り下げ36の先端の揺動量を建造物本体16の揺動量として適用しても良い。
【0034】
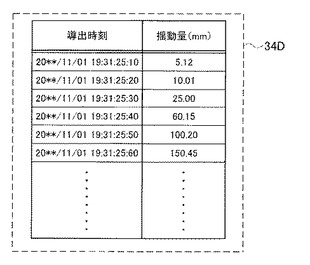
次のステップ104では、上記ステップ102の処理によって導出された建造物本体16の揺動量を予め定められた記憶領域α(一例として二次記憶部34Dの所定領域)に時系列順に記憶した後、ステップ106に移行する。図6には、建造物本体16の揺動量が記憶される記憶領域αの一例が模式的に示されている。図6に示す例では、現時点の時刻毎(ここでは一例として上記ステップ104の処理の実行時刻毎)に建造物本体16の揺動量が記憶された例が示されている。
【0035】
ステップ106では、上記ステップ104の処理によって記憶領域αに記憶された建造物本体16の揺動量の個数(導出結果の個数)が予め定められた閾値(一例として「30」)を超えたか否かを判定し、否定判定となった場合にはステップ102に戻る一方、肯定判定となった場合にはステップ108に移行する。
【0036】
ステップ108では、現時点で記憶領域αに記憶されている建造物本体16の揺動量に基づいて建造物本体16の最大揺動量(一例として最大振幅)を推定する。本ステップ108では、例えば、現時点で記憶領域αに記憶されている建造物本体16の揺動量から揺動量のピークtoピーク値を抽出し、抽出したピークtoピーク値から最大揺動量を算出することにより推定する。また、この他の方法としては、建造物本体16の揺動量の経時変化のプロファイルとして予め定められた複数のパターンのプロファイルとこれらのプロファイルの各々に対して一意に定められた建造物本体16の最大揺動量とが対応付けられて構成されたテーブルから、現時点で記憶領域αに記憶されている建造物本体16の揺動量によって作成されたプロファイルに対応する最大揺動量を導出することにより建造物本体16の最大揺動量を推定する方法が例示できる。また、記憶領域αに時刻毎に記憶されている建造物本体16の揺動量から揺動速度を算出し、算出した揺動速度から建造物本体16の最大揺動量を推定しても良い。なお、本第1の実施の形態では最大揺動量として最大振幅を推定しているが、これに限らず、建造物10の特定の位置(例えば建造物本体16の初期状態時の静止位置)からの最大揺動量であっても良い。また、最大揺動量に限らず、記憶領域αに記憶されている建造物本体16の揺動量の平均値であっても良い。また、揺動量の推定に限定する必要はなく、揺動量、揺動速度及び揺動加速度の少なくとも1つを推定することも可能である。
【0037】
ステップ110では、上記ステップ108の処理によって推定された最大揺動量を二次記憶部34Dの予め定められた記憶領域βに現時点の時刻に関連付けて記憶すると共に、ディスプレイ34Fに現時点の時刻と共に表示した後、本揺動特徴推定処理プログラムを終了する。なお、上記ステップ110では、最大揺動量を記憶すると共に表示する場合の処理を例示したが、これに限らず、最大揺動量が予め定められた揺動量を超えた場合に警告を表示(可視表示、永久可視表示及び可聴表示)する処理であっても良いし、これらの処理を選択的に実行しても良い。何れの処理の実行を選択するかはユーザによって操作部34Eを介して行わせると良い。
【0038】
以上詳細に説明したように、本第1の実施の形態に係る揺動特徴推定装置30によれば、基礎14に設置された免震装置18に支持された建造物本体16に設けられた磁場を発生する磁場発生体の一例である永久磁石36Bと、基礎14に設けられ、永久磁石36Bによって発生した磁場の強さを測定する測定手段の一例である磁気センサ38Aと、磁気センサ38Aの測定結果に基づいて建造物10の揺動の特徴を示す揺動特徴情報(一例として建造物本体16の揺動量)を導出する導出手段の一例であるCPU34Aと、を備えているので、建造物本体16の揺動の特徴を容易かつ高精度に推定することができる。
【0039】
また、本第1の実施の形態に係る揺動特徴推定装置30によれば、揺動特徴情報として、振り下げ36の先端(一例として永久磁石38Aの先端)の揺動範囲を特定する情報(一例として振り下げ36の先端の揺動量)に対応する情報(一例として建造物本体16の揺動量)を採用しているので、建造物本体16の揺動範囲を高精度かつ容易に把握することができる。
【0040】
また、本第1の実施の形態に係る揺動特徴推定装置30によれば、永久磁石36Bとこの永久磁石36Bを磁気センサ38Aに近接させるように支持する支持体の一例である鉄棒36Aと、を含んで構成された振り下げ36を備えているので、振り下げ36を有しない場合に比べ、磁場の強さを容易かつ正確に測定することができる。
【0041】
また、振り下げ36の先端部を先細りした形状としたので、磁場の強さをより一層容易かつ正確に測定することができる。
【0042】
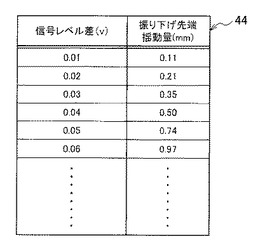
なお、上記第1の実施の形態では、ビオ・サバールの法則を用いて振り下げ36の先端の揺動量を算出する場合の形態例を挙げて説明したが、これに限らず、例えば図7に示すように、ROM34Cに振り下げ揺動量導出テーブル44を予め記憶させておき、振り下げ揺動量導出テーブル44を用いて振り下げ36の先端の揺動量を導出しても良い。一例として図7に示すように、振り下げ揺動量導出テーブル44は、磁気センサ38から出力される電圧信号のうち、所定時間間隔で前後する電圧信号間の信号レベルの差と振り下げ36の先端の揺動量とが対応付けられて構成されている。このように構成された振り下げ揺動量導出テーブル44を用いて建造物本体16の揺動量を推定する場合、上記ステップ102において、前回取得した電圧信号の信号レベルと今回取得した電圧信号の信号レベルとの差(信号レベル差)を算出し、この信号レベル差に対応する振り下げ36の先端の揺動量を振り下げ揺動量導出テーブル44から導出し、導出した振り下げ36の先端の揺動量に基づいて建造物本体16の揺動量を推定する。なお、振り下げ揺動量導出テーブル44で用いられる振り下げ36の先端の揺動量としては、種々の条件下で各々繰り返し行われたコンピュータ・シミュレーションや実験などによって予め得られた値を用いれば良い。
【0043】
また、上記第1の実施の形態では、建造物本体16の揺動量を建造物本体揺動量導出テーブル42から導出する形態例を挙げて説明したが、これに限らず、振り下げ36の先端の揺動量に対して予め定められた補正係数を乗じて得た結果又は所定の演算式を用いて得られた解を建造物本体16の揺動量として採用しても良い。
【0044】
また、上記第1の実施の形態では、ビオ・サバールの法則を用いて所定時間毎に振り下げ36の先端の揺動量を推定する場合の形態例を挙げて説明したが、これに限らず、例えば初期状態時に磁気センサ38Aで測定される磁場の強さに相当する磁場の強さが磁気センサ38Aによって測定された時刻を二次記憶部34Dに蓄積し、蓄積した時刻の時間間隔から振り下げ36の先端の揺動量を推定しても良い。このように所定の磁場の強さに相当する磁場の強さが磁気センサ38Aによって測定された時刻を二次記憶部34Dに蓄積し、蓄積した時刻の時間間隔から振り下げ36の先端の揺動量を推定することも可能である。
【0045】
また、上記第1の実施の形態では、上記ステップ106の処理として導出結果の個数が閾値を超えたか否かを判定する処理を適用しているが、これに限らず、例えば上記ステップ102の処理の実行を初めて開始してから所定時間が経過したか否かを判定する処理を適用しても良く、所定条件を満足するまで上記ステップ102,104の処理を繰り返し実行するようにすれば良い。
【0046】
[第2の実施の形態]
【0047】
上記第1の実施の形態では、単数の測定送信装置38を用いて建造物の揺動の特徴を推定する場合の形態例を挙げて説明したが、本第2の実施の形態では複数の測定送信装置を用いて建造物10の揺動の特徴を推定する場合について説明する。なお、本第2の実施の形態では、上記第1の実施の形態と同一の部分については同一の符号を付して説明を省略する。
【0048】
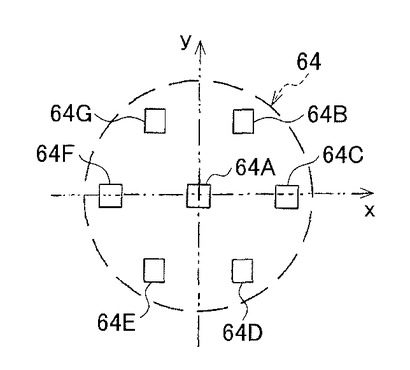
図8は、本第2の実施の形態に係る揺動特徴推定装置60に含まれる測定送信部62の構成の一例を示す概略構成図である。図8に示すように、本第2の実施の形態に係る揺動特徴推定装置60は、上記第1の実施の形態で示した揺動特徴推定装置30に比べ、測定部32に代えて測定部62を適用した点が異なっている。測定部62は、上記第1の実施の形態で説明した測定部32に比べ、測定送信装置38に代えて測定送信装置群64を適用した点が異なっている。測定送信装置群64は、一例として図9に示すように、測定送信装置64A〜64Gを含んで構成されており、これらの各々は何れも上記第1の実施の形態で説明した測定送信装置38と同様に構成されている。基礎14上において、測定送信装置64Aは、上記第1の実施の形態で説明した測定送信装置38と同様の位置に載置され、測定送信装置64B〜64Gの各々は、測定送信装置64Aを中心に仮想的に描かれる正六角形の各頂点に重なるように載置されている。
【0049】
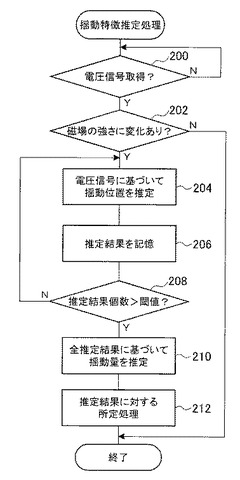
次に、本第2の実施の形態に係る揺動特徴推定装置60の作用として、図10を参照して、本第2の実施の形態に係る揺動特徴推定処理を実行する際の揺動特徴推定装置60の作用を説明する。なお、図10は、推定部34の操作部34Eを介して本第2の実施の形態に係る揺動特徴推定処理を実行する旨の指示入力が行われた際に推定部34のCPU34Aによって実行される揺動特徴推定処理プログラムの処理の流れの一例を示すフローチャートであり、このプログラムは二次記憶部34Dの所定領域に予め記憶されている。
【0050】
図10のステップ200では、測定送信装置64A〜64Gの各々から送信された各電圧信号を受信(取得)するまで待機する。ステップ200において各電圧信号が取得されると肯定判定となってステップ202に移行する。ステップ202では、測定送信装置64A〜64Gの各々に含まれる磁気センサ38Aの何れかによって測定された磁場の強さが初期状態時に測定された磁場の強さから変化したか否かを判定し、否定判定となった場合には本揺動特徴推定処理プログラムを終了する一方、肯定判定となった場合にはステップ204に移行する。
【0051】
ステップ204では、上記ステップ200の処理で取得された磁気センサ38A毎の電圧信号の信号レベルから一意に定まる磁場の強さ及び磁場の強さの測定時に磁気センサ38Aに流れる電流値からビオ・サバールの法則を用いて逆問題を解くことにより、振り下げ36の先端の揺動位置を、基準位置を原点とした二次元座標を用いて推定した後、ステップ206に移行する。基準位置を原点とした二次元座標とは、具体的には図9に示すように測定送信装置64Aの中心点上に位置する振り下げ36の先端の位置を原点とした水平面上に設定された二次元座標のことを言う。よって、振り下げ36の先端の揺動位置は、初期状態のときの振り下げ36の先端を含む水平面を、初期状態のときの振り下げ36の先端の位置を原点とした二次元座標面とした場合の図11に示す点Pが二次元座標面に投影されたときの位置を特定する二次元座標によって表すことができる。
【0052】
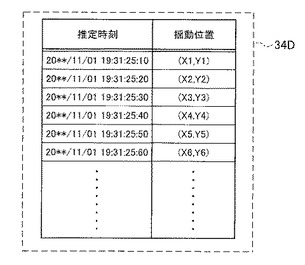
ステップ206では、上記ステップ202の処理によって推定された揺動位置を予め定められた記憶領域α(一例として二次記憶部34Dの所定領域)に時系列順に記憶した後、ステップ208に移行する。図12には、揺動位置が記憶される記憶領域αの一例が模式的に示されている。図12に示すように、揺動位置を特定する二次元座標は、揺動位置を推定した時刻毎(ここでは一例として上記ステップ204の処理の実施時刻毎)に記憶される。なお、図12に示す例では、揺動位置を特定する二次元座標が0.1秒間隔で記憶された場合が示されている。
【0053】
ステップ208では、上記ステップ206の処理によって記憶領域αに記憶された揺動位置の個数(推定結果の個数)が予め定められた閾値(一例として「1000」)を超えたか否かを判定し、否定判定となった場合にはステップ202に戻る一方、肯定判定となった場合にはステップ210に移行する。
【0054】
ステップ210では、現時点で記憶領域αに記憶されている揺動位置に基づいて予め定められた期間内の建造物本体16の揺動量を推定する。本ステップ210では、例えば最初に推定した揺動位置から所定時間(1.5秒)後に推定した揺動位置までの距離を算出し、算出して得られた結果に対して予め定められた補正係数を乗じて得られた値を予め定められた期間内の建造物本体16の揺動量として採用している。ここで言う補正係数とは、振り下げ36の先端の揺動量を建造物本体16の揺動量に補正するための係数のことである。この補正係数を乗じる理由としては、振り下げ36の先端の揺動量が必ずしも建造物本体16の揺動量に相当するとは限らないため、建造物本体16の揺動に伴って振り下げ36が揺動したときに生じる振り下げ36の撓みに係る要素を除去する必要があるからである。しかし、例えば振り下げ36の高さに対する太さの割合が非常に大きいなどの振り下げ36の剛性に基づく撓みが無視できる理由があれば、振り下げ36の先端の揺動量を建造物本体16の揺動量としてそのまま採用しても良い。また、本第2の実施の形態では、ステップ210にて予め定められた期間内の建造物本体16の揺動量を推定する例を挙げているが、これに限らず、予め定められた期間内の建造物本体16の速度や加速度などを建造物10の揺動の特徴を示す情報として推定しても良い。
【0055】
次のステップ212では、上記ステップ206の処理によって記憶領域αに記憶された揺動位置から導出された建造物本体16の揺動位置間(所定時間毎(ここでは一例として0.1秒毎)の揺動区間)を繋ぎ合わせることにより建造物本体16の揺動経路を辿る軌跡を作成し、作成した軌跡をディスプレイ34Fに表示すると共に、上記ステップ210の処理によって推定された揺動量を、何れの揺動区間の揺動量であるかを特定可能に表示する。図13には、建造物本体16の揺動に係る軌跡がディスプレイ34Fに表示された一例が示されている。図13に示す例では、上記ステップ210の処理で推定された建造物本体16の揺動量が10cmであることが示されている。また、図13には図示されていないが、建造物本体16の揺動量が10cmと表示された対応する軌跡を他の軌跡とは異なる形態で表示しても良い。ここで言う「他の軌跡と異なる形態で表示」としては、線種を他の軌跡と異ならせて表示すること、色を他の軌跡と異ならせて表示すること等が例示できる。また、予め定められた時間間隔毎に軌跡の表示形態(例えば線種や色)を変えても良いし、予め定められた揺動区間の軌跡のみを残してそれ以外の軌跡を消去しても良いし、その逆であっても良い。
【0056】
なお、上記ステップ212の処理においても建造物本体16の揺動位置を特定する二次元座標は、記憶領域αに記憶された隣接する揺動位置間の距離の各々(所定時間毎(ここでは一例として0.1秒毎)の揺動区間)に対して上述した補正係数を乗じることによって導出されるが、例えば振り下げ36の高さに対する太さの割合が非常に大きいなどの振り下げ36の剛性に基づく振り下げ36の撓みを無視できる理由があれば、振り下げ36の先端の揺動量を建造物本体16の揺動量としてそのまま採用しても良い。
【0057】
以上詳細に説明したように、本第2の実施の形態に係る揺動特徴推定装置60によれば、基礎14に設置された免震装置18に支持された建造物本体16に設けられた磁場を発生する磁場発生体の一例である永久磁石36Bと、各々基礎14に設けられ、永久磁石36Bによって発生した磁場の強さを測定する複数の測定手段の一例である複数の磁気センサ38Aと、複数の磁気センサ38Aの各々の測定結果(一例として各磁気センサ38Aで測定された磁場の強さに対応する電圧信号)に基づいて建造物10の揺動の特徴を示す揺動特徴情報(一例として揺動位置を特定する二次元座標)を導出する導出手段の一例であるCPU34Aと、を備えているので、建造物本体16の揺動の特徴を容易かつ高精度に推定することができる。
【0058】
また、揺動特徴情報として、振り下げ36の先端の位置を特定する情報(一例として振り下げ36の先端の揺動位置を特定する二次元座標)に対応する情報(一例として振り下げ36の先端の揺動位置間の距離に補正係数を乗じて得られた二次元座標)を採用しているので、建造物本体16の揺動経路を高精度かつ容易に把握することができる。
【0059】
なお、上記第2の実施の形態では、測定送信装置64A〜64Gの各々に含まれる磁気センサ38Aの各々の測定結果からビオ・サバールの法則を用いて振り下げ36の先端の揺動位置を導出する場合の形態例を挙げて説明したが、これに限らず、例えば測定送信装置64A〜64Gの各々に含まれる磁気センサ38Aの各々から出力される電圧信号の信号レベルの組み合わせと二次元座標とが対応付けられて構成された揺動位置導出テーブルを事前に用意しておき(例えばROM34Cに予め記憶しておき)、この揺動位置導出テーブルを用いて振り下げ36の先端の揺動位置を導出しても良い。なお、揺動位置導出テーブルで用いられる振り下げ36の先端の揺動量としては、種々の条件下で各々繰り返し行われたコンピュータ・シミュレーションや実験などによって予め得られた値を用いれば良い。
【0060】
また、上記第2の実施の形態では、測定送信装置64A〜64Gを用いて振り下げ36の先端の揺動位置を特定する二次元座標を導出する場合の形態例を挙げて説明したが、測定送信装置の設置個数を増やすことにより、揺動位置を特定する二次元座標がきめ細かく導出可能となることは言うまでも無い。逆に、測定送信装置の設置個数を減らせばその分だけ演算量が少なくなるので演算にかかる負荷(例えばCPU34Aにかかる負荷)を軽減することが可能となる。
【0061】
また、上記第2の実施の形態では、上記ステップ208の処理として推定結果の個数が閾値を超えたか否かを判定する処理を適用しているが、これに限らず、例えば上記ステップ202の処理の実行を初めて開始してから所定時間が経過したか否かを判定する処理を適用しても良く、所定条件を満足するまで上記ステップ202,204,206の処理を繰り返し実行するようにすれば良い。
【0062】
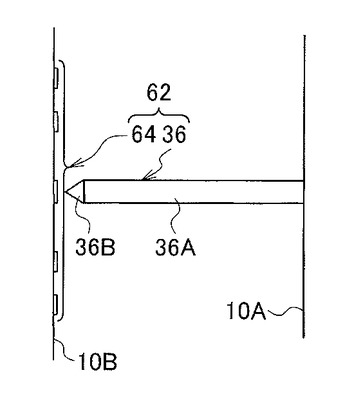
また、上記各実施の形態では、建造物本体16の水平方向の揺動の特徴を推定する場合の形態例を挙げて説明したが、これに限らず、例えば図14に示すように建造物本体16に含まれる縦壁10Aの壁面に振り下げ36の基端を固定し、振り下げ36の先端側の縦壁(縦壁10Aに対向する縦壁であって、基礎14の一部を構成する縦壁)10Bに測定送信装置群64を設けても良い。この場合、振り下げ36と測定送信装置群64との相対的な位置関係は上記第2の実施の形態で説明した位置関係を適用すれば良い。これにより、建造物10の縦揺れ(鉛直方向の揺動)の特徴を推定することが可能となる。但し、図14に示すように縦壁10Aに対して棒状の振り下げ36の基端が固定された場合に振り下げ36の自重により振り下げ36が撓んでしまうような場合は振り下げ36の長さを短くし(振り下げ36の高さに対する太さの割合を大きくし)、測定送信装置群64を台座に載せて振り下げ36の先端との距離を縮めると良い。
【0063】
また、上記各実施の形態では、所定時間毎に振り下げ36の揺動の特徴から建造物10の揺動の特徴を導出したが、振り下げ36の先端の揺動の特徴に係る情報だけを先に取得しておき、後で一括して建造物本体16の揺動の特徴を導出しても良い。
【0064】
また、上記各実施の形態では、振り下げ36の先端の磁場の強さに基づいて建造物本体16の揺動の特徴を推定したが、この他にも建造物本体16の揺動の特徴を推定する手法が考えられる。例えば、振り下げ36に代えて先端部に発光体を備えたロッドの基端を建造物本体16に含まれる躯体に固定し、発光体から発せられる光を検知する複数のフォトセンサをロッドの先端側にロッドから距離を置くと共に同一平面上(例えば基礎14の上面)に所定間隔毎に散在させて、これらのフォトセンサで発光体の光を検知することによってロッドの先端部の揺動位置を推定する、という手法が挙げられる。また、フォトセンサを単数とし、このフォトセンサで光を検知した時刻を蓄積しておき、蓄積した時刻の時間間隔からロッドの揺動の大きさを推定する、という手法も考えられる。
【0065】
また、上記各実施の形態では、永久磁石36Bを用いた場合の形態例を挙げて説明したが、これに限らず、電磁石であっても良いし、磁化された磁性体(一例として鉄)であっても良い。このように磁場を発生する磁場発生体であれば如何なるものも適用可能である。
【0066】
また、上記各実施の形態では、上記ステップ110及び上記ステップ212に示す「所定処理」として、建造物本体16の揺動の特徴を示す揺動特徴情報をディスプレイ34Fに表示する処理を実行する場合の形態例を挙げて説明したが、ディスプレイ34Fに表示せずに例えば二次記憶部34Dに記憶して留めておいても良いし、特定の通信装置に送信する処理を適用しても良い。
【0067】
また、上記各実施の形態では、建造物本体16に振り下げ36を固定し、振り下げ36に対向するように基礎14に磁気センサ38Aを固定したが、これらを逆に配置しても良い。つまり、建造物本体16に磁気センサ38Aを配置し、基礎14に振り下げ36を配置するということである。但し、この場合、振り下げ36を、その先端(永久磁石35B)が磁気センサ38Aに対向するように(永久磁石35Bの磁場の強さが測定可能となる位置に)配置する必要がある。
【0068】
また、上記各実施の形態では、振り下げ36に含まれる鉄棒36Aの全長を固定値としたが、伸縮自在に構成しても良い。この場合、外筒とこの外筒にスライド自在に有用される内筒と、を含んで構成された伸縮鉄棒が例示できる。これにより、建造物本体16の下面と基礎14の上面との間隔に応じて振り下げの全長を調節することが可能となる。
【符号の説明】
【0069】
10 建造物
16 建造物本体
18 免震装置
34A CPU
36 振り下げ
36A 鉄棒
36B 永久磁石
38A 磁気センサ
【技術分野】
【0001】
本発明は、免震装置を有する建造物に対して適用される揺動特徴推定装置に関する。
【背景技術】
【0002】
免震装置を有する建造物において、例えば地震などにより建造物が大きく揺れた場合、建造物の基礎と免震装置上の建造物本体とで大きな相対変形が生じる。免震装置を有する建造物については、建造物の変形状態を記録しておくことが推奨されており、地盤に接している建造物の基礎上に台紙を設置し、その上に地震時の軌跡を描く方式(罫書き方式)が一般的である。
【0003】
罫書き方式の他にも例えば特許文献1には、免震装置を有する建造物に含まれる建造物本体の地震時の水平方向の揺動量をスライド部材を用いて計測する発明が開示されている。この発明は、地震発生時に滑り部分が非滑り部分の上又は下を水平方向に摺動することに伴ってスライド部材をスライドさせることにより水平方向の揺動量を記録するものである。スライド部材は地震が収まった後もその位置に停止するので、スライド部材のスライド量がどの程度なのかを目盛りで確認することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−38804号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、罫書き方式の場合、台紙に軌跡が描かれた後に台紙を新しいものに交換しなければならない上、台紙に描かれた軌跡から揺動量を計算しなればならなかった。また、特許文献1に記載の技術は、揺動量を計測した後、スライド部材を含む装置一式を取り換えなければならない上、揺動量を目盛りから読み取らなければならなかった。このように、従来の手法で免震装置を有する建造物に含まれる建造物本体の揺動量を推定する場合、手間がかかる割に高精度な推定が困難である、という問題点があった。
【0006】
本発明は上記問題点を解決するために成されたものであり、建造物本体の揺動の特徴を容易かつ高精度に推定することができる揺動特徴推定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載の揺動特徴推定装置を、基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、前記建造物本体及び前記基礎の他方に設けられ、前記磁場発生体によって発生した磁場の強さを測定する測定手段と、前記測定手段の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、を含んで構成した。
【0008】
請求項1に記載の揺動特徴推定装置を、請求項2に記載の発明のように、前記揺動特徴情報を、前記磁場発生体の揺動範囲を特定する情報に対応する情報としたものとした。
【0009】
一方、上記目的を達成するために、請求項3に記載の揺動特徴推定装置を、基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、各々前記建造物本体及び前記基礎の他方に対して設けられ、前記磁場発生体によって発生した磁場の強さを測定する複数の測定手段と、前記複数の測定手段の各々の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、を含んで構成した。
【0010】
請求項3に記載の揺動特徴推定装置を、請求項4に記載の発明のように、前記揺動特徴情報を、前記磁場発生体の位置を特定する情報に対応する情報としたものとした。
【0011】
請求項1〜請求項4の何れか1項に記載の揺動特徴推定装置を、請求項5に記載の発明のように、前記磁場発生体と、前記測定手段に近接させるように該磁場発生体を支持する支持体と、を含んで構成された振り下げを含むものとした。
【発明の効果】
【0012】
請求項1及び請求項3に記載の発明によれば、本構成を有しない場合に比べ、建造物本体の揺動の特徴を容易かつ高精度に推定することができる、という効果が得られる。
【0013】
請求項2に記載の発明によれば、揺動特徴情報を、磁場発生体の揺動範囲を特定する情報に対応する情報とした構成を有しない場合に比べ、建造物本体の揺動範囲を高精度かつ容易に把握することができる、という効果が得られる。
【0014】
請求項4に記載の発明によれば、揺動特徴情報を、磁場発生体の位置を特定する情報に対応する情報とした構成を有しない場合に比べ、建造物本体の揺動経路を高精度かつ容易に把握することができる、という効果が得られる。
【0015】
請求項5に記載の発明によれば、前記磁場発生体と、前記測定手段に近接させるように該磁場発生体を支持する支持体と、を含んで構成された振り下げを有しない場合に比べ、磁場の強さを容易かつ正確に測定することができる、という効果が得られる。
【図面の簡単な説明】
【0016】
【図1】第1の実施の形態に係る揺動特徴推定装置が適用された鉄筋コンクリート造の建造物の一例を示す立面図である。
【図2】第1の実施の形態に係る揺動特徴推定装置の構成の一例を示す概略構成図である。
【図3】第1の実施の形態に係る揺動特徴推定装置の電気系の要部構成の一例を示すブロック図である。
【図4】第1の実施の形態に係る推定部のROMに記憶されている建造物本体揺動量導出テーブルの一例を示す模式図である。
【図5】第1の実施の形態に係る揺動特徴推定処理プログラムの処理の流れの異例を示すフローチャートである。
【図6】第1の実施の形態に係る推定部の二次記憶部に導出時刻毎に揺動量が対応付けられて記憶された一例を示す模式図である。
【図7】第1の実施の形態に係る推定部のROMに記憶されている振り下げ揺動量導出テーブルの一例を示す模式図である。
【図8】第2の実施の形態に係る揺動特徴推定装置の構成の一例を示す概略構成図である。
【図9】第2の実施の形態に係る揺動特徴推定装置に含まれる測定送信装置群の配置例を示す概略平面図である。
【図10】第2の実施の形態に係る揺動特徴推定処理プログラムの処理の流れの異例を示すフローチャートである。
【図11】ビオ・サバールの法則の説明に供する説明図である。
【図12】第2の実施の形態に係る推定部の二次記憶部に推定時刻毎に揺動位置が対応付けられて記憶された一例を示す模式図である。
【図13】第2の実施の形態に係る推定部のディスプレイに表示された建造物の揺動経路を表す軌跡の一例を示す画面図である。
【図14】実施の形態に係る揺動特徴推定装置の変形例を示す概略構成図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して、本発明を実施するための形態の一例について詳細に説明する。なお、以下の実施の形態では、免震装置を有する鉄筋コンクリート造の建造物に本発明を適用した例を示すが、鉄骨造、鉄筋コンクリート造、CFT造(Concrete-Filled Steel Tube:充填形鋼管コンクリート構造)、それらの混合構造など、免震装置を有する様々な構造や規模の構造物に対して適用することができる。
【0018】
[第1の実施の形態]
【0019】
図1は、鉄筋コンクリート造の建造物10の一例を示す立面図である。図1に示すように、建造物10は、地盤12上に設けられた下部構造物としての鉄筋コンクリート造の基礎14と、上部構造物としての鉄筋コンクリート造の建造物本体16と、基礎14と建造物本体16との間に挿入された免震装置18と、を含んで構成されている。免震装置18は、鉛プラグ入りの複数の積層ゴム体24を含んで構成されている。
【0020】
積層ゴム体24は、円盤状のゴム体と円盤状の鋼製の板部材とを交互に複数積層して形成されており、平面視にてゴム体及び板部材の略中央に形成された孔に圧入された円柱状の鉛プラグの塑性変形によって減衰機能を発揮する。
【0021】
上記のように構成された建造物10は、揺動特徴推定装置30を含んで構成されている。揺動特徴推定装置30は、基礎14と建造物本体16との間に配置され、建造物本体16の水平方向に対する揺動(以下、「建造物本体16の揺動」という。)の特徴を推定するために要する物理量を測定する測定部32と、建造物10の一室に設置されており、測定部32での測定結果に基づいて建造物本体16の揺動の特徴を推定する推定部34と、を含んで構成されている。
【0022】
図2は、本第1の実施の形態に係る揺動特徴推定装置30の構成の一例を示す概略構成図である。図2に示すように、測定部32は、振り下げ36及び測定送信装置38を含んで構成されている。振り下げ36は、鉄を材料として形成された円柱状の鉄棒36A及び鉄棒36Aの先端面に固定された永久磁石36Bを含んで構成されている。鉄棒36Aの基端は建造物本体16の下面に固定されている。永久磁石36Bは先細りした形状(一例として円錐状)に形成されており、その底面が鉄棒36Aの先端面に固定され、これによって永久磁石36Bは鉄棒36Aに支持される。測定送信装置38は、振り下げ36に含まれる永久磁石36Bによって発生する磁場の強さを測定すると共に測定結果を所定の送信先に無線送信するものであり、振り下げ36の先端(一例として円錐状の永久磁石36Bの頂点)の真下に位置すると共に振り下げ36の先端に近接するように基礎14の上面に設置されている。なお、ここで言う「近接」とは、例えば測定送信装置38により所定の磁場の強さが測定可能となる間隔で振り下げ36の先端と離れているということであり、具体的には測定送信装置38の測定面から振り下げ36の先端まで所定距離(例えば80mm)離れていることを意味する。
【0023】
推定部34は、測定送信装置38の無線送信先である。本第1の実施の形態では、推定部34として、測定送信装置38との間で通信(無線通信又は有線通信)可能なパーソナル・コンピュータを適用しているが、これに限らず、例えばマイクロコンピュータであっても良く、後述する揺動推定処理プログラムを実行することができるコンピュータを備えたものであれば代替可能である。
【0024】
図3は、本第1の実施の形態に係る推定部34及び測定送信装置38の電気系の要部構成の一例を示すブロック図である。図3に示すように、推定部34は、推定部34全体の動作を司るCPU(Central Processing Unit:中央処理装置)34Aと、CPU34Aによる各種処理プログラムの実行時のワークエリア等として用いられるRAM(Random Access Memory)34Bと、各種制御プログラムや各種パラメータ等が予め記憶されたROM(Read Only Memory)34Cと、各種情報を記憶するために用いられる記憶手段としての二次記憶部(一例としてハードディスク装置)34Dと、各種情報を入力するために操作される操作部(一例としてマウス及びキーボード)34Eと、各種情報を表示するために用いられるディスプレイ(一例として液晶ディスプレイ)34Fと、測定送信装置38との間での無線通信動作を制御する無線通信部34Gと、が備えられており、これら各部はアドレスバス、データバス、及び制御バス等のバス40を介して互いに電気的に接続されている。
【0025】
従って、CPU34Aは、RAM34B、ROM34C及び二次記憶部34Dに対するアクセス、操作部34Eを介した各種情報の取得、ディスプレイ34Fに対する各種情報の表示、並びに無線通信部34Gを介した測定送信装置38との間の各種情報の授受を各々行うことができる。
【0026】
一方、測定送信装置38は、永久磁石36Bによって発生する磁場の強さを測定する磁気センサ38Aと、磁気センサ38Aにより測定された磁場の強さを示す情報(一例として電圧信号)を推定部34の無線通信部34Gに対して無線通信により所定時間(例えば0.1秒)毎に送信する送信部38Bとを備えている。
【0027】
本第1の実施の形態に係る磁気センサ38Aは、アモルファス磁性金属ワイヤのMI効果(Magnet-Impedance Effect)を応用した磁気センサである。アモルファスとは、非晶質という意味であり、通常の金属とは異なって結晶構造を持たず、内部構造が一様で理想的な軟磁気特性を示す。MI効果とは、アモルファス磁性金属ワイヤにパルス電流を流したときのインピーダンスが微小な外部磁界により極めて大きな変化を示す現象を指す。本第1の実施の形態に係る磁気センサ38Aは、外部磁界(外部磁場)の強さを測定するセンサとして使用され、アモルファス磁性金属ワイヤのインピーダンスに対応する電圧信号を出力する。
【0028】
ところで、本第1の実施の形態に係る揺動特徴推定装置30では、磁気センサ38Aによって測定された磁場の強さに基づいて振り下げ36の先端の揺動量を導出し、導出した振り下げ36の先端の揺動量に基づいて建造物本体16の揺動量を推定する揺動量推定機能を有している。この揺動量推定機能を実現するために、本第1の実施の形態に係る推定部34のROM34Bには一例として図4に示す建造物本体揺動量導出テーブル42が予め記憶されている。一例として図4に示すように、建造物本体揺動量導出テーブル42は、振り下げ36が静止している状態(以下、「初期状態」という。)のときの振り下げ36の先端の位置を基準位置とした場合の基準位置からのずれ量である振り下げ36の先端の揺動量と振り下げ36の先端の揺動量に対して一意に定められた建造物10の揺動の特徴を示す揺動特徴情報の一例である建造物本体16の揺動量(建造物本体16の初期状態時の静止位置からのずれ量)とが対応付けられて構成されている。なお、ここでは、建造物本体16の揺動量として、種々の条件下で各々繰り返し行われたコンピュータ・シミュレーションや実験などによって予め得られた値を適用している。
【0029】
次に、本第1の実施の形態に係る揺動特徴推定装置30の作用として、図5を参照して、揺動特徴推定処理を実行する際の揺動特徴推定装置30の作用を説明する。なお、図5は、推定部34の操作部34Eを介して揺動特徴推定処理を実行する旨の指示入力が行われた際に推定部34のCPU34Aによって実行される揺動特徴推定処理プログラムの処理の流れの一例を示すフローチャートであり、このプログラムは二次記憶部34Dの所定領域に予め記憶されている。
【0030】
図5のステップ100では、測定送信装置38から送信された電圧信号を受信(取得)するまで待機する。ステップ100において電圧信号が取得されると肯定判定となってステップ101に移行する。ステップ101では、磁気センサ38Aによって測定された磁場の強さが初期状態時に測定された磁場の強さから変化したか否かを判定し、否定判定となった場合には本揺動特徴推定処理プログラムを終了する一方、肯定判定となった場合にはステップ102に移行する。
【0031】
ステップ102では、上記ステップ100の処理で取得された電圧信号に基づいて建造物本体16の揺動量を導出する。本ステップ102では、例えば、電圧信号の信号レベルから一意に定まる磁場の強さ及び磁場の強さの測定時に磁気センサ38Aに流れる電流値からビオ・サバールの法則を用いて逆問題を解くことにより、振り下げ36の先端の初期状態時の位置からの揺動量を算出する。そして、算出した揺動量に対して1対1で予め対応付けられた建造物本体16の揺動量を建造物本体揺動量導出テーブル42から導出する。なお、ビオ・サバールの法則とは、下記の(1)式で表される法則のこと言う。(1)式は、一例として図11に示すように、電流の微小部分がある点(ここでは点Pという)に作る磁場の強さ(磁場の大きさ)が、電流値I、その微小部分の長さΔs、及び電流の方向と点Pの方向とのなす角θの正弦に比例し、点Pまでの距離rの二乗に反比例することを示している。なお、(1)式において、Bは磁場の強さを示し、μ0/4πは比例定数を示している。
【0032】
ΔB=(μ0/4π)・(IΔs・sinθ/r2)・・・・(1)
【0033】
なお、本第1の実施の形態では、上記ステップ102の処理として、建造物本体揺動量導出テーブル42から建造物本体16の揺動量を導出する処理の形態例を挙げているが、これに限らず、例えば振り下げ36の高さに対する太さ(例えば外径)の割合が非常に大きいなどの振り下げ36の剛性が無視できる理由があれば、振り下げ36の先端の揺動量を建造物本体16の揺動量として適用しても良い。
【0034】
次のステップ104では、上記ステップ102の処理によって導出された建造物本体16の揺動量を予め定められた記憶領域α(一例として二次記憶部34Dの所定領域)に時系列順に記憶した後、ステップ106に移行する。図6には、建造物本体16の揺動量が記憶される記憶領域αの一例が模式的に示されている。図6に示す例では、現時点の時刻毎(ここでは一例として上記ステップ104の処理の実行時刻毎)に建造物本体16の揺動量が記憶された例が示されている。
【0035】
ステップ106では、上記ステップ104の処理によって記憶領域αに記憶された建造物本体16の揺動量の個数(導出結果の個数)が予め定められた閾値(一例として「30」)を超えたか否かを判定し、否定判定となった場合にはステップ102に戻る一方、肯定判定となった場合にはステップ108に移行する。
【0036】
ステップ108では、現時点で記憶領域αに記憶されている建造物本体16の揺動量に基づいて建造物本体16の最大揺動量(一例として最大振幅)を推定する。本ステップ108では、例えば、現時点で記憶領域αに記憶されている建造物本体16の揺動量から揺動量のピークtoピーク値を抽出し、抽出したピークtoピーク値から最大揺動量を算出することにより推定する。また、この他の方法としては、建造物本体16の揺動量の経時変化のプロファイルとして予め定められた複数のパターンのプロファイルとこれらのプロファイルの各々に対して一意に定められた建造物本体16の最大揺動量とが対応付けられて構成されたテーブルから、現時点で記憶領域αに記憶されている建造物本体16の揺動量によって作成されたプロファイルに対応する最大揺動量を導出することにより建造物本体16の最大揺動量を推定する方法が例示できる。また、記憶領域αに時刻毎に記憶されている建造物本体16の揺動量から揺動速度を算出し、算出した揺動速度から建造物本体16の最大揺動量を推定しても良い。なお、本第1の実施の形態では最大揺動量として最大振幅を推定しているが、これに限らず、建造物10の特定の位置(例えば建造物本体16の初期状態時の静止位置)からの最大揺動量であっても良い。また、最大揺動量に限らず、記憶領域αに記憶されている建造物本体16の揺動量の平均値であっても良い。また、揺動量の推定に限定する必要はなく、揺動量、揺動速度及び揺動加速度の少なくとも1つを推定することも可能である。
【0037】
ステップ110では、上記ステップ108の処理によって推定された最大揺動量を二次記憶部34Dの予め定められた記憶領域βに現時点の時刻に関連付けて記憶すると共に、ディスプレイ34Fに現時点の時刻と共に表示した後、本揺動特徴推定処理プログラムを終了する。なお、上記ステップ110では、最大揺動量を記憶すると共に表示する場合の処理を例示したが、これに限らず、最大揺動量が予め定められた揺動量を超えた場合に警告を表示(可視表示、永久可視表示及び可聴表示)する処理であっても良いし、これらの処理を選択的に実行しても良い。何れの処理の実行を選択するかはユーザによって操作部34Eを介して行わせると良い。
【0038】
以上詳細に説明したように、本第1の実施の形態に係る揺動特徴推定装置30によれば、基礎14に設置された免震装置18に支持された建造物本体16に設けられた磁場を発生する磁場発生体の一例である永久磁石36Bと、基礎14に設けられ、永久磁石36Bによって発生した磁場の強さを測定する測定手段の一例である磁気センサ38Aと、磁気センサ38Aの測定結果に基づいて建造物10の揺動の特徴を示す揺動特徴情報(一例として建造物本体16の揺動量)を導出する導出手段の一例であるCPU34Aと、を備えているので、建造物本体16の揺動の特徴を容易かつ高精度に推定することができる。
【0039】
また、本第1の実施の形態に係る揺動特徴推定装置30によれば、揺動特徴情報として、振り下げ36の先端(一例として永久磁石38Aの先端)の揺動範囲を特定する情報(一例として振り下げ36の先端の揺動量)に対応する情報(一例として建造物本体16の揺動量)を採用しているので、建造物本体16の揺動範囲を高精度かつ容易に把握することができる。
【0040】
また、本第1の実施の形態に係る揺動特徴推定装置30によれば、永久磁石36Bとこの永久磁石36Bを磁気センサ38Aに近接させるように支持する支持体の一例である鉄棒36Aと、を含んで構成された振り下げ36を備えているので、振り下げ36を有しない場合に比べ、磁場の強さを容易かつ正確に測定することができる。
【0041】
また、振り下げ36の先端部を先細りした形状としたので、磁場の強さをより一層容易かつ正確に測定することができる。
【0042】
なお、上記第1の実施の形態では、ビオ・サバールの法則を用いて振り下げ36の先端の揺動量を算出する場合の形態例を挙げて説明したが、これに限らず、例えば図7に示すように、ROM34Cに振り下げ揺動量導出テーブル44を予め記憶させておき、振り下げ揺動量導出テーブル44を用いて振り下げ36の先端の揺動量を導出しても良い。一例として図7に示すように、振り下げ揺動量導出テーブル44は、磁気センサ38から出力される電圧信号のうち、所定時間間隔で前後する電圧信号間の信号レベルの差と振り下げ36の先端の揺動量とが対応付けられて構成されている。このように構成された振り下げ揺動量導出テーブル44を用いて建造物本体16の揺動量を推定する場合、上記ステップ102において、前回取得した電圧信号の信号レベルと今回取得した電圧信号の信号レベルとの差(信号レベル差)を算出し、この信号レベル差に対応する振り下げ36の先端の揺動量を振り下げ揺動量導出テーブル44から導出し、導出した振り下げ36の先端の揺動量に基づいて建造物本体16の揺動量を推定する。なお、振り下げ揺動量導出テーブル44で用いられる振り下げ36の先端の揺動量としては、種々の条件下で各々繰り返し行われたコンピュータ・シミュレーションや実験などによって予め得られた値を用いれば良い。
【0043】
また、上記第1の実施の形態では、建造物本体16の揺動量を建造物本体揺動量導出テーブル42から導出する形態例を挙げて説明したが、これに限らず、振り下げ36の先端の揺動量に対して予め定められた補正係数を乗じて得た結果又は所定の演算式を用いて得られた解を建造物本体16の揺動量として採用しても良い。
【0044】
また、上記第1の実施の形態では、ビオ・サバールの法則を用いて所定時間毎に振り下げ36の先端の揺動量を推定する場合の形態例を挙げて説明したが、これに限らず、例えば初期状態時に磁気センサ38Aで測定される磁場の強さに相当する磁場の強さが磁気センサ38Aによって測定された時刻を二次記憶部34Dに蓄積し、蓄積した時刻の時間間隔から振り下げ36の先端の揺動量を推定しても良い。このように所定の磁場の強さに相当する磁場の強さが磁気センサ38Aによって測定された時刻を二次記憶部34Dに蓄積し、蓄積した時刻の時間間隔から振り下げ36の先端の揺動量を推定することも可能である。
【0045】
また、上記第1の実施の形態では、上記ステップ106の処理として導出結果の個数が閾値を超えたか否かを判定する処理を適用しているが、これに限らず、例えば上記ステップ102の処理の実行を初めて開始してから所定時間が経過したか否かを判定する処理を適用しても良く、所定条件を満足するまで上記ステップ102,104の処理を繰り返し実行するようにすれば良い。
【0046】
[第2の実施の形態]
【0047】
上記第1の実施の形態では、単数の測定送信装置38を用いて建造物の揺動の特徴を推定する場合の形態例を挙げて説明したが、本第2の実施の形態では複数の測定送信装置を用いて建造物10の揺動の特徴を推定する場合について説明する。なお、本第2の実施の形態では、上記第1の実施の形態と同一の部分については同一の符号を付して説明を省略する。
【0048】
図8は、本第2の実施の形態に係る揺動特徴推定装置60に含まれる測定送信部62の構成の一例を示す概略構成図である。図8に示すように、本第2の実施の形態に係る揺動特徴推定装置60は、上記第1の実施の形態で示した揺動特徴推定装置30に比べ、測定部32に代えて測定部62を適用した点が異なっている。測定部62は、上記第1の実施の形態で説明した測定部32に比べ、測定送信装置38に代えて測定送信装置群64を適用した点が異なっている。測定送信装置群64は、一例として図9に示すように、測定送信装置64A〜64Gを含んで構成されており、これらの各々は何れも上記第1の実施の形態で説明した測定送信装置38と同様に構成されている。基礎14上において、測定送信装置64Aは、上記第1の実施の形態で説明した測定送信装置38と同様の位置に載置され、測定送信装置64B〜64Gの各々は、測定送信装置64Aを中心に仮想的に描かれる正六角形の各頂点に重なるように載置されている。
【0049】
次に、本第2の実施の形態に係る揺動特徴推定装置60の作用として、図10を参照して、本第2の実施の形態に係る揺動特徴推定処理を実行する際の揺動特徴推定装置60の作用を説明する。なお、図10は、推定部34の操作部34Eを介して本第2の実施の形態に係る揺動特徴推定処理を実行する旨の指示入力が行われた際に推定部34のCPU34Aによって実行される揺動特徴推定処理プログラムの処理の流れの一例を示すフローチャートであり、このプログラムは二次記憶部34Dの所定領域に予め記憶されている。
【0050】
図10のステップ200では、測定送信装置64A〜64Gの各々から送信された各電圧信号を受信(取得)するまで待機する。ステップ200において各電圧信号が取得されると肯定判定となってステップ202に移行する。ステップ202では、測定送信装置64A〜64Gの各々に含まれる磁気センサ38Aの何れかによって測定された磁場の強さが初期状態時に測定された磁場の強さから変化したか否かを判定し、否定判定となった場合には本揺動特徴推定処理プログラムを終了する一方、肯定判定となった場合にはステップ204に移行する。
【0051】
ステップ204では、上記ステップ200の処理で取得された磁気センサ38A毎の電圧信号の信号レベルから一意に定まる磁場の強さ及び磁場の強さの測定時に磁気センサ38Aに流れる電流値からビオ・サバールの法則を用いて逆問題を解くことにより、振り下げ36の先端の揺動位置を、基準位置を原点とした二次元座標を用いて推定した後、ステップ206に移行する。基準位置を原点とした二次元座標とは、具体的には図9に示すように測定送信装置64Aの中心点上に位置する振り下げ36の先端の位置を原点とした水平面上に設定された二次元座標のことを言う。よって、振り下げ36の先端の揺動位置は、初期状態のときの振り下げ36の先端を含む水平面を、初期状態のときの振り下げ36の先端の位置を原点とした二次元座標面とした場合の図11に示す点Pが二次元座標面に投影されたときの位置を特定する二次元座標によって表すことができる。
【0052】
ステップ206では、上記ステップ202の処理によって推定された揺動位置を予め定められた記憶領域α(一例として二次記憶部34Dの所定領域)に時系列順に記憶した後、ステップ208に移行する。図12には、揺動位置が記憶される記憶領域αの一例が模式的に示されている。図12に示すように、揺動位置を特定する二次元座標は、揺動位置を推定した時刻毎(ここでは一例として上記ステップ204の処理の実施時刻毎)に記憶される。なお、図12に示す例では、揺動位置を特定する二次元座標が0.1秒間隔で記憶された場合が示されている。
【0053】
ステップ208では、上記ステップ206の処理によって記憶領域αに記憶された揺動位置の個数(推定結果の個数)が予め定められた閾値(一例として「1000」)を超えたか否かを判定し、否定判定となった場合にはステップ202に戻る一方、肯定判定となった場合にはステップ210に移行する。
【0054】
ステップ210では、現時点で記憶領域αに記憶されている揺動位置に基づいて予め定められた期間内の建造物本体16の揺動量を推定する。本ステップ210では、例えば最初に推定した揺動位置から所定時間(1.5秒)後に推定した揺動位置までの距離を算出し、算出して得られた結果に対して予め定められた補正係数を乗じて得られた値を予め定められた期間内の建造物本体16の揺動量として採用している。ここで言う補正係数とは、振り下げ36の先端の揺動量を建造物本体16の揺動量に補正するための係数のことである。この補正係数を乗じる理由としては、振り下げ36の先端の揺動量が必ずしも建造物本体16の揺動量に相当するとは限らないため、建造物本体16の揺動に伴って振り下げ36が揺動したときに生じる振り下げ36の撓みに係る要素を除去する必要があるからである。しかし、例えば振り下げ36の高さに対する太さの割合が非常に大きいなどの振り下げ36の剛性に基づく撓みが無視できる理由があれば、振り下げ36の先端の揺動量を建造物本体16の揺動量としてそのまま採用しても良い。また、本第2の実施の形態では、ステップ210にて予め定められた期間内の建造物本体16の揺動量を推定する例を挙げているが、これに限らず、予め定められた期間内の建造物本体16の速度や加速度などを建造物10の揺動の特徴を示す情報として推定しても良い。
【0055】
次のステップ212では、上記ステップ206の処理によって記憶領域αに記憶された揺動位置から導出された建造物本体16の揺動位置間(所定時間毎(ここでは一例として0.1秒毎)の揺動区間)を繋ぎ合わせることにより建造物本体16の揺動経路を辿る軌跡を作成し、作成した軌跡をディスプレイ34Fに表示すると共に、上記ステップ210の処理によって推定された揺動量を、何れの揺動区間の揺動量であるかを特定可能に表示する。図13には、建造物本体16の揺動に係る軌跡がディスプレイ34Fに表示された一例が示されている。図13に示す例では、上記ステップ210の処理で推定された建造物本体16の揺動量が10cmであることが示されている。また、図13には図示されていないが、建造物本体16の揺動量が10cmと表示された対応する軌跡を他の軌跡とは異なる形態で表示しても良い。ここで言う「他の軌跡と異なる形態で表示」としては、線種を他の軌跡と異ならせて表示すること、色を他の軌跡と異ならせて表示すること等が例示できる。また、予め定められた時間間隔毎に軌跡の表示形態(例えば線種や色)を変えても良いし、予め定められた揺動区間の軌跡のみを残してそれ以外の軌跡を消去しても良いし、その逆であっても良い。
【0056】
なお、上記ステップ212の処理においても建造物本体16の揺動位置を特定する二次元座標は、記憶領域αに記憶された隣接する揺動位置間の距離の各々(所定時間毎(ここでは一例として0.1秒毎)の揺動区間)に対して上述した補正係数を乗じることによって導出されるが、例えば振り下げ36の高さに対する太さの割合が非常に大きいなどの振り下げ36の剛性に基づく振り下げ36の撓みを無視できる理由があれば、振り下げ36の先端の揺動量を建造物本体16の揺動量としてそのまま採用しても良い。
【0057】
以上詳細に説明したように、本第2の実施の形態に係る揺動特徴推定装置60によれば、基礎14に設置された免震装置18に支持された建造物本体16に設けられた磁場を発生する磁場発生体の一例である永久磁石36Bと、各々基礎14に設けられ、永久磁石36Bによって発生した磁場の強さを測定する複数の測定手段の一例である複数の磁気センサ38Aと、複数の磁気センサ38Aの各々の測定結果(一例として各磁気センサ38Aで測定された磁場の強さに対応する電圧信号)に基づいて建造物10の揺動の特徴を示す揺動特徴情報(一例として揺動位置を特定する二次元座標)を導出する導出手段の一例であるCPU34Aと、を備えているので、建造物本体16の揺動の特徴を容易かつ高精度に推定することができる。
【0058】
また、揺動特徴情報として、振り下げ36の先端の位置を特定する情報(一例として振り下げ36の先端の揺動位置を特定する二次元座標)に対応する情報(一例として振り下げ36の先端の揺動位置間の距離に補正係数を乗じて得られた二次元座標)を採用しているので、建造物本体16の揺動経路を高精度かつ容易に把握することができる。
【0059】
なお、上記第2の実施の形態では、測定送信装置64A〜64Gの各々に含まれる磁気センサ38Aの各々の測定結果からビオ・サバールの法則を用いて振り下げ36の先端の揺動位置を導出する場合の形態例を挙げて説明したが、これに限らず、例えば測定送信装置64A〜64Gの各々に含まれる磁気センサ38Aの各々から出力される電圧信号の信号レベルの組み合わせと二次元座標とが対応付けられて構成された揺動位置導出テーブルを事前に用意しておき(例えばROM34Cに予め記憶しておき)、この揺動位置導出テーブルを用いて振り下げ36の先端の揺動位置を導出しても良い。なお、揺動位置導出テーブルで用いられる振り下げ36の先端の揺動量としては、種々の条件下で各々繰り返し行われたコンピュータ・シミュレーションや実験などによって予め得られた値を用いれば良い。
【0060】
また、上記第2の実施の形態では、測定送信装置64A〜64Gを用いて振り下げ36の先端の揺動位置を特定する二次元座標を導出する場合の形態例を挙げて説明したが、測定送信装置の設置個数を増やすことにより、揺動位置を特定する二次元座標がきめ細かく導出可能となることは言うまでも無い。逆に、測定送信装置の設置個数を減らせばその分だけ演算量が少なくなるので演算にかかる負荷(例えばCPU34Aにかかる負荷)を軽減することが可能となる。
【0061】
また、上記第2の実施の形態では、上記ステップ208の処理として推定結果の個数が閾値を超えたか否かを判定する処理を適用しているが、これに限らず、例えば上記ステップ202の処理の実行を初めて開始してから所定時間が経過したか否かを判定する処理を適用しても良く、所定条件を満足するまで上記ステップ202,204,206の処理を繰り返し実行するようにすれば良い。
【0062】
また、上記各実施の形態では、建造物本体16の水平方向の揺動の特徴を推定する場合の形態例を挙げて説明したが、これに限らず、例えば図14に示すように建造物本体16に含まれる縦壁10Aの壁面に振り下げ36の基端を固定し、振り下げ36の先端側の縦壁(縦壁10Aに対向する縦壁であって、基礎14の一部を構成する縦壁)10Bに測定送信装置群64を設けても良い。この場合、振り下げ36と測定送信装置群64との相対的な位置関係は上記第2の実施の形態で説明した位置関係を適用すれば良い。これにより、建造物10の縦揺れ(鉛直方向の揺動)の特徴を推定することが可能となる。但し、図14に示すように縦壁10Aに対して棒状の振り下げ36の基端が固定された場合に振り下げ36の自重により振り下げ36が撓んでしまうような場合は振り下げ36の長さを短くし(振り下げ36の高さに対する太さの割合を大きくし)、測定送信装置群64を台座に載せて振り下げ36の先端との距離を縮めると良い。
【0063】
また、上記各実施の形態では、所定時間毎に振り下げ36の揺動の特徴から建造物10の揺動の特徴を導出したが、振り下げ36の先端の揺動の特徴に係る情報だけを先に取得しておき、後で一括して建造物本体16の揺動の特徴を導出しても良い。
【0064】
また、上記各実施の形態では、振り下げ36の先端の磁場の強さに基づいて建造物本体16の揺動の特徴を推定したが、この他にも建造物本体16の揺動の特徴を推定する手法が考えられる。例えば、振り下げ36に代えて先端部に発光体を備えたロッドの基端を建造物本体16に含まれる躯体に固定し、発光体から発せられる光を検知する複数のフォトセンサをロッドの先端側にロッドから距離を置くと共に同一平面上(例えば基礎14の上面)に所定間隔毎に散在させて、これらのフォトセンサで発光体の光を検知することによってロッドの先端部の揺動位置を推定する、という手法が挙げられる。また、フォトセンサを単数とし、このフォトセンサで光を検知した時刻を蓄積しておき、蓄積した時刻の時間間隔からロッドの揺動の大きさを推定する、という手法も考えられる。
【0065】
また、上記各実施の形態では、永久磁石36Bを用いた場合の形態例を挙げて説明したが、これに限らず、電磁石であっても良いし、磁化された磁性体(一例として鉄)であっても良い。このように磁場を発生する磁場発生体であれば如何なるものも適用可能である。
【0066】
また、上記各実施の形態では、上記ステップ110及び上記ステップ212に示す「所定処理」として、建造物本体16の揺動の特徴を示す揺動特徴情報をディスプレイ34Fに表示する処理を実行する場合の形態例を挙げて説明したが、ディスプレイ34Fに表示せずに例えば二次記憶部34Dに記憶して留めておいても良いし、特定の通信装置に送信する処理を適用しても良い。
【0067】
また、上記各実施の形態では、建造物本体16に振り下げ36を固定し、振り下げ36に対向するように基礎14に磁気センサ38Aを固定したが、これらを逆に配置しても良い。つまり、建造物本体16に磁気センサ38Aを配置し、基礎14に振り下げ36を配置するということである。但し、この場合、振り下げ36を、その先端(永久磁石35B)が磁気センサ38Aに対向するように(永久磁石35Bの磁場の強さが測定可能となる位置に)配置する必要がある。
【0068】
また、上記各実施の形態では、振り下げ36に含まれる鉄棒36Aの全長を固定値としたが、伸縮自在に構成しても良い。この場合、外筒とこの外筒にスライド自在に有用される内筒と、を含んで構成された伸縮鉄棒が例示できる。これにより、建造物本体16の下面と基礎14の上面との間隔に応じて振り下げの全長を調節することが可能となる。
【符号の説明】
【0069】
10 建造物
16 建造物本体
18 免震装置
34A CPU
36 振り下げ
36A 鉄棒
36B 永久磁石
38A 磁気センサ
【特許請求の範囲】
【請求項1】
基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、
前記建造物本体及び前記基礎の他方に設けられ、前記磁場発生体によって発生した磁場の強さを測定する測定手段と、
前記測定手段の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、
を含む揺動特徴推定装置。
【請求項2】
前記揺動特徴情報を、前記磁場発生体の揺動範囲を特定する情報に対応する情報とした請求項1に記載の揺動特徴推定装置。
【請求項3】
基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、
各々前記建造物本体及び前記基礎の他方に対して設けられ、前記磁場発生体によって発生した磁場の強さを測定する複数の測定手段と、
前記複数の測定手段の各々の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、
を含む揺動特徴推定装置。
【請求項4】
前記揺動特徴情報を、前記磁場発生体の位置を特定する情報に対応する情報とした請求項3に記載の揺動特徴推定装置。
【請求項5】
前記磁場発生体と、前記測定手段に近接させるように該磁場発生体を支持する支持体と、を含んで構成された振り下げを含む請求項1〜請求項4の何れか1項に記載の揺動特徴推定装置。
【請求項1】
基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、
前記建造物本体及び前記基礎の他方に設けられ、前記磁場発生体によって発生した磁場の強さを測定する測定手段と、
前記測定手段の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、
を含む揺動特徴推定装置。
【請求項2】
前記揺動特徴情報を、前記磁場発生体の揺動範囲を特定する情報に対応する情報とした請求項1に記載の揺動特徴推定装置。
【請求項3】
基礎に設置された免震装置に支持された建造物本体及び前記基礎の一方に設けられた磁場を発生する磁場発生体と、
各々前記建造物本体及び前記基礎の他方に対して設けられ、前記磁場発生体によって発生した磁場の強さを測定する複数の測定手段と、
前記複数の測定手段の各々の測定結果に基づいて前記建造物本体の揺動の特徴を示す揺動特徴情報を導出する導出手段と、
を含む揺動特徴推定装置。
【請求項4】
前記揺動特徴情報を、前記磁場発生体の位置を特定する情報に対応する情報とした請求項3に記載の揺動特徴推定装置。
【請求項5】
前記磁場発生体と、前記測定手段に近接させるように該磁場発生体を支持する支持体と、を含んで構成された振り下げを含む請求項1〜請求項4の何れか1項に記載の揺動特徴推定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図14】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図14】
【図13】
【公開番号】特開2013−96753(P2013−96753A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−237752(P2011−237752)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
[ Back to top ]