
揺動装置
【課題】身体をより効果的にほぐすことが可能な揺動装置を提供する。
【解決手段】身体を揺動させる揺動機構を備えた揺動装置は、椅子型のマッサージ機であり、座部と背もたれ部とを備え、座部の前側には脚を載置するためのオットマンが装備されている。オットマンは左右方向に揺動運動をするように制御される。オットマンの一対の脚支持部が昇降可能に設けられており、脚支持部の昇降位置によって身体の揺動部位が変化する。オットマンは、揺動部位A,B,Cの変化に対応する異なる揺動周波数F1,F2,F3となるように揺動制御される。
【解決手段】身体を揺動させる揺動機構を備えた揺動装置は、椅子型のマッサージ機であり、座部と背もたれ部とを備え、座部の前側には脚を載置するためのオットマンが装備されている。オットマンは左右方向に揺動運動をするように制御される。オットマンの一対の脚支持部が昇降可能に設けられており、脚支持部の昇降位置によって身体の揺動部位が変化する。オットマンは、揺動部位A,B,Cの変化に対応する異なる揺動周波数F1,F2,F3となるように揺動制御される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、身体の一部を支持する支持手段を揺動させる機能を備えた揺動装置に関する。
【背景技術】
【0002】
従来、使用者が着座した状態でマッサージを受けられる椅子型のマッサージ機が知られている。こうした椅子型のマッサージ機には、使用者の脚部を載置可能な脚載台(オットマン)が装備されたものがある。例えば特許文献1及び特許文献2には、脚載台(オットマン)を左右に揺動させる揺動機構を備えた椅子型のマッサージ機が開示されている。使用者の脚部を支持している脚載台が左右方向に往復移動することに伴って、使用者の両脚を含む下半身全体が腰部を中心として揺動運動をし、この揺動運動により使用者の脚部の緊張状態を緩和するマッサージ効果が得られる。
【0003】
また、特許文献2に開示されているマッサージ機では、揺動機構を備えた脚載部が脚の長さ方向にスライドして位置調整できる技術や、座部の隆起を調節して臀部の支持状態を変化させて、身体の揺動支点を変化させることにより、身体の揺動部位を変化させる技術が開示されている。また、脚を上下方向に揺動させる揺動部を備えたマッサージ機(例えば特許文献3)や、腰部を揺動させる揺動部を備えたマッサージ機(例えば特許文献4)なども知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−328262号公報
【特許文献2】特開2008−237295号公報
【特許文献3】特開平11−113998号公報
【特許文献4】特開2007−167434号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2では、脚載部が脚の長手方向に移動することにより脚に対する支持位置を変えたり、あるいは座部の隆起を調節して臀部の支持状態を変化させることにより姿勢を変えたりすることにより、使用者の身体の揺動する部位や領域(以下、「揺動部位」という)を変化させることができるが、揺動部位の変化だけでは、揺動によるマッサージが単調であり、身体をほぐす効果も十分ではないという問題があった。
【0006】
本発明は、上記課題を解決するためになされたものであって、その目的は、身体をより効果的にほぐすことができる揺動装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明は、使用者の身体を揺動させる揺動機能を備えた揺動装置において、身体の一部を支持する支持手段と、前記支持手段を揺動させる揺動駆動手段と、前記支持手段が揺動するときの身体の揺動部位を変化させる揺動部位変化手段と、前記揺動部位の変化と前記支持手段の揺動による揺れパターンの変化とを対応付けて前記揺動駆動手段を制御する制御手段と、を備えたことを要旨とする。
【0008】
本発明の揺動装置において、前記制御手段は、前記揺動部位が異なれば、揺動周波数の異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することが好ましい。
【0009】
本発明の揺動装置において、前記制御手段は、前記揺動部位が異なれば、前記揺動部位に対応する揺れパターンで揺動を実施する揺動実施期間における揺動周波数の平均値が異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することが好ましい。
【0010】
本発明の揺動装置において、前記揺動実施期間における揺動周波数の平均値が異なる制御は、前記揺動部位が大きい方が、前記揺動周波数の平均値を低くする制御であることが好ましい。
【0011】
本発明の揺動装置において、前記揺動部位の変化と揺れパターンの変化が対応付けられた制御は、前記揺動部位が異なれば、揺動周波数のゆらぎ幅を異ならせる制御であることが好ましい。
【0012】
本発明の揺動装置において、前記揺動部位変化手段が揺動部位を変化させるのと略同時に、前記制御手段は揺れパターンを変化させることが好ましい。
本発明の揺動装置において、前記揺動部位変化手段が揺動部位を変化させたとき、前記制御手段は前記揺動部位の変化に対応する揺れパターンへ漸進的に変化させることが好ましい。
【0013】
本発明の揺動装置において、前記揺動部位変化手段が揺動部位を変化させたときに、前記制御手段は揺れパターンを変化させる場合と変化させない場合の両方を含んだ制御を行うことが好ましい。
【0014】
本発明の揺動装置において、前記揺動部位変化手段は、前記支持手段が支持する身体の支持位置を変化させることが好ましい。
本発明の揺動装置において、前記揺動部位変化手段は、前記支持手段が把持する身体の把持位置を変化させることが好ましい。
【0015】
本発明の揺動装置において、前記揺動部位変化手段は、前記支持手段に支持される支持位置以外の身体部位を支持し、当該身体部位の支持位置を変化させることが好ましい。
本発明の揺動装置において、座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記椅子に突出と退避とが可能に設けられた複数の支持部を有し、前記複数の支持部のうち突出させるものを選択することにより、身体の支持位置を変化させることが好ましい。
【0016】
本発明の揺動装置において、前記揺動部位変化手段は、身体の姿勢を変化させることが好ましい。
本発明の揺動装置において、座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記座部に対する少なくとも前記背もたれ部の傾動角を変化させることが好ましい。
【0017】
本発明の揺動装置において、前記支持手段は、使用者の脚の一部を支持する脚支持手段であり、前記揺動駆動手段は、前記脚支持手段を揺動させることが好ましい。
【発明の効果】
【0018】
本発明によれば、より効果的に身体をほぐすことが可能な揺動装置を提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明を具体化した第1実施形態における椅子型のマッサージ機の斜視図。
【図2】座部及びオットマンを正面から見た模式図。
【図3】図2のA−A線矢視図。
【図4】(a)〜(c)は脚支持部の昇降位置を示す模式正面図、(d)は脚支持部の昇降機構を示す模式側面図。
【図5】マッサージ機の揺動制御に係る電気的構成を示すブロック図。
【図6】揺動部位と揺動周波数との対応関係を示すグラフ。
【図7】第2実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図8】第3実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図9】第4実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図10】第5実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図11】(a),(b)第6実施形態において脚の把持位置を変化させるエアバッグ式の揺動部位変化機構を示す模式正面図。
【図12】第7実施形態において身体の支持位置を変化させるエアバッグ式の支持位置変化機構を示す模式図。
【図13】マッサージ機の揺動制御に係る電気的構成を示すブロック図。
【図14】(a)〜(c)エアバッグの膨張による身体支持位置を示す斜視図。
【図15】(a)〜(c)身体支持位置の違いに応じた揺動部位を説明する側面図。
【図16】第8実施形態において身体の支持位置を変化させるエアバッグ式の支持位置変化機構を示す斜視図。
【図17】リクライニング機構付きの椅子型マッサージ機を示す側面図。
【図18】マッサージ機の揺動制御に係る電気的構成を示すブロック図。
【図19】(a)〜(c)椅子の姿勢を示す斜視図。
【図20】(a)〜(c)椅子の姿勢の違いに応じた揺動部位を説明する側面図。
【図21】(a)〜(c)第9実施形態における脚支持部の昇降位置と揺動周波数との対応関係を示す模式正面図。
【図22】(a),(b)第10実施形態におけるエアバッグによる脚把持位置と揺動周波数との対応関係を示す模式正面図。
【図23】(a)〜(c)第11実施形態におけるエアバッグによる身体支持位置と揺動周波数との対応関係を示す斜視図。
【図24】(a)〜(c)第12実施形態における椅子の姿勢と揺動周波数との対応関係を示す斜視図。
【発明を実施するための形態】
【0020】
(第1実施形態)
以下、本発明を椅子型のマッサージ機に具体化した第1実施形態を図1〜図6に従って説明する。
【0021】
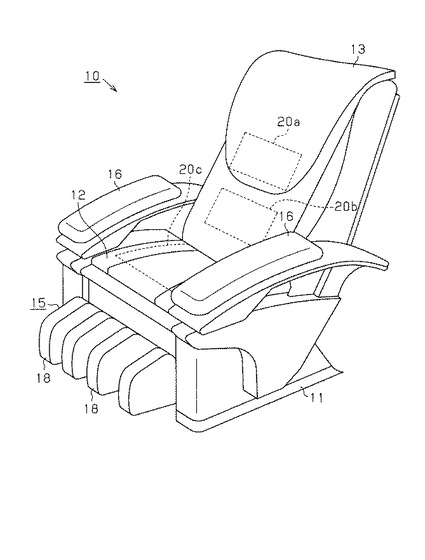
図1に示すように、揺動装置としての椅子型のマッサージ機10は、図示しない床面に載置される脚部11を備え、その脚部11の上方には使用者が着座可能な座部12が固定されている。この座部12の後側には、使用者が背中をもたせ掛けさせるための背もたれ部13が傾動可能に設けられている。また、座部12の前側には、使用者の脚を載せることができるオットマン15(脚載台)が同じく傾動可能に設けられている。また、座部12の左右両側には、使用者の腕を置くための肘掛け部16が背もたれ部13から座部12の両側前方にかけて設けられている。オットマン15には、使用者の脚を挿入可能な凹状をなす脚支持部18が左右に計2つ配置されている。そして、各脚支持部18は左右方向に揺動可能となっている。また、背もたれ部13及び座部12には、使用者の身体の一部を押圧可能なエアバッグよりなる、背押圧部20a、腰押圧部20b及び座押圧部20cが各々設けられている。さらに、背もたれ部13には身体のマッサージを行うためのもみ玉などの施療子(図示せず)が内装されている。なお、本実施形態では、脚支持部18が、支持手段及び脚支持手段に相当する。
【0022】
図2に示すように、左右1組の脚支持部18は、左右方向に揺動可能な連結ベース部24に対して左右方向に一体で揺動可能、かつ脚Kの長手方向に移動可能(昇降可能)な状態で取り付けられている。脚支持部18を昇降させることにより、使用者の脚Kの足首から膝下までの範囲内の任意の部位を支持可能となっている。ここで、オットマン15において脚支持部18の上昇とは膝側への移動を指し、その下降とは足先側への移動を指すものとする。オットマン15には、脚支持部18が左右方向に揺動するときの身体の揺動部位を、脚支持部18を脚の長手方向に移動させることにより変化させる揺動部位変化手段としての揺動部位変化機構23が設けられている。
【0023】
図3に示すように、左右の脚支持部18が前面(図3における下側)に取り付けられた連結ベース部24は、その背面側(図3では上側)に配置された揺動駆動手段としての揺動駆動部19が駆動されることにより、左右方向の揺動運動を行う。揺動駆動部19は、動力源となるモータ25と、このモータ25の回転駆動力を左右方向への往復直線運動に変換する直動変換機構26とを有している。
【0024】
直動変換機構26は、オットマン15の固定フレーム(図示せず)に、左右方向に沿って延びるように架設されたガイドレール27と、このガイドレール27に沿って摺動自在に支持される一対の可動部24aを有する連結ベース部24とを備える。さらに、直動変換機構26は、モータ25の回転軸(図示略)に同軸回転可能に連結された回転部材25aと、回転部材25aと一方(図3では右側)の可動部24aとの間に介装されたリンク部材28とを有している。リンク部材28はその基端部が回転部材25aの周縁部に対して回動自在に連結され、その先端部が一方(図3では右側)の可動部24aに対して回動自在に連結されている。
【0025】
このため、モータ25が駆動されて回転部材25aが回転し、リンク部材28の基端部が回転運動をすることにより、その先端部と連結された一方の可動部24aに力が伝達されてその可動部24aがガイドレール27に沿って左右方向に往復摺動することによって、連結ベース部24はガイドレール27に沿って左右方向に往復移動する。このようにガイドレール27に沿って連結ベース部24が左右方向に往復移動することで、オットマン15の脚支持部18が一体的に揺動する。
【0026】
図4(d)に示すように、オットマン15には、脚支持部18を昇降させて脚支持部18により支持される脚Kにおける支持位置(支持部位)を変化させることにより、脚Kのうち揺動することになる揺動部位を変化させる揺動部位変化機構23が設けられている。揺動部位変化機構23は、脚支持部18と、直動型のアクチュエータ29とを備える。直動型のアクチュエータ29は連結ベース部24の背面に組み付けられ、その駆動軸29aの先端部に脚支持部18が固定されている。図2及び図3に示す連結ベース部24には、縦方向(脚長手方向)に沿って延びるスリット(図示せず)が形成され、脚支持部18はスリットを介して連結ベース部24の裏面側の駆動軸29a(図4(d)参照)と連結されている。図4(d)に示すアクチュエータ29は、例えば直動型の電動アクチュエータであり、その駆動軸29aが軸方向に移動(又は伸縮)することにより、脚支持部18は、図4(a)〜(c)に示すように昇降方向(図4では上下方向)にスライドする。
【0027】
そして、脚支持部18は、図4(a)に示す下降位置と、図4(b)に示す中間位置と、図4(c)に示す上昇位置とをそれぞれ中心高さとする下降範囲・中間範囲・上昇範囲のうちのいずれかの範囲に属するように昇降するようになっている。脚支持部18が図4(a)に示す下降位置にある状態で左右方向(同図における矢印方向)に揺動するときは、脚Kの先端側に揺れの力が付与され、下腿下部と足が揺動部位となる。また、脚支持部18が図4(b)に示す中間位置にある状態で左右方向に揺動するときは、脚Kのうち下腿の中間部位に揺れの力が付与され、下腿全体と足が揺動部位となる。さらに、脚支持部18が図4(c)に示す上昇位置にある状態で左右方向に揺動するときは、脚Kの膝下部に揺れの力が付与され、脚全体が揺動部位となる。
【0028】
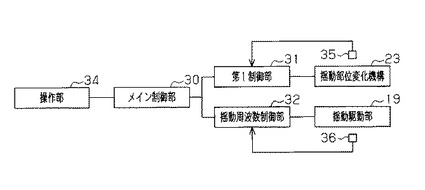
次に、マッサージ機10における揺動制御に係る電気的構成を説明する。図5に示すように、マッサージ機10には、オットマン15の揺動制御を含む各種の制御を司るメイン制御部30が設けられている。メイン制御部30には、揺動部位変化機構23を駆動制御する第1制御部31と、揺動駆動部19を駆動させて脚支持部18を揺動させるとともにその揺動周波数を制御する揺動周波数制御部32とが電気的に接続されている。メイン制御部30には、マッサージ機10の運転の開始/停止や、リクライニング動作、エアバッグの膨縮、オットマン15の揺動運動、脚支持部18の昇降などを行う際に使用者が操作するリモートコントロール式の操作部34が接続されている。使用者が操作部34を操作して脚支持部18の上昇/下降を指示すると、第1制御部31はメイン制御部30からの指示に従ってアクチュエータ29を駆動制御して、使用者が操作部34で指示する方向へ脚支持部18を移動させる。なお、メイン制御部30は、マッサージ機10の背もたれ部13に内装されたもみ玉などの施療子の駆動制御も行う。
【0029】
第1制御部31は、脚支持部18の昇降方向の位置を変化させることにより、身体の揺動部位を変化させる。詳しくは、使用者がマッサージ機10に着座した状態で、両脚Kを挿入した各脚支持部18が左右方向に揺動するときには、脚支持部18の昇降位置に応じて決まる揺動支点から足先までの部位が、揺動部位(揺動領域)となる。
【0030】
揺動部位変化機構23には、脚支持部18による脚Kの支持位置を検出するセンサ35が設けられている。センサ35としては、脚支持部18の昇降位置を検出する例えば位置センサが用いられる。第1制御部31はセンサ35から入力する検出結果に基づき脚支持部18の昇降位置を取得する。
【0031】
揺動周波数制御部32は、脚支持部18の昇降位置(つまり脚Kの支持位置)と揺動周波数との対応関係、すなわち脚Kの揺動部位と揺動周波数との対応関係を示す参照データをメモリに記憶している。揺動周波数制御部32は、揺動駆動部19の駆動開始時及び駆動中に、第1制御部31からメイン制御部30を介して脚支持部18の昇降位置情報を逐次取得し、メモリに記憶された前述の参照データを参照することにより、その取得した脚支持部18の昇降位置に対応する揺動周波数を取得する。そして、揺動周波数制御部32は、その取得した揺動周波数で脚支持部18を揺動させうる回転速度でモータ25を制御する。なお、参照データには、詳細には、脚支持部18の昇降位置に対応するモータ25の回転速度、あるいはこの回転速度を決める電圧値(例えばデューティ値)などのデータが記憶され、脚支持部18の昇降位置を基に参照データを参照して取得した回転速度又は電圧値に基づきモータ25の回転速度を制御する構成としてもよい。
【0032】
また、揺動駆動部19には、モータ25の回転を直接又は間接的に検出可能なロータリエンコーダ等からなるセンサ36が設けられている。揺動周波数制御部32は、センサ36から入力した検出信号に基づきモータ25の回転速度を取得し、その回転速度に基づき脚支持部18が左右方向に揺動しているときの実際の揺動周波数Fを取得する。そして、揺動周波数制御部32は、メイン制御部30から指令された揺動周波数に、実際の揺動周波数を近づけるようにフィードバック制御を行う。もちろん、揺動周波数Fのフィードフォワード制御を採用してもよい。
【0033】
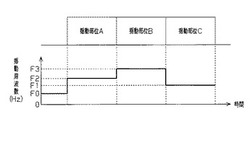
本実施形態の参照データには、脚支持部18の昇降位置毎に、異なる揺動周波数が設定されている。例えば図6に示すように、脚支持部18の昇降位置に応じて決まる揺動部位A,B,C毎に、異なる揺動周波数F2,F3,F1(但しF1<F2<F3)がそれぞれ設定されている。なお、図6は一例であって、揺動部位A,B,Cに応じた揺動周波数は、複数の揺動部位毎に異なっていればよい。揺動部位と揺動周波数の組合せも3組に限定されず、3組以外の複数組であってもよい。さらに、揺動部位の切り換わり順も、使用者の操作あるいはモードに応じて適宜変更可能である。また、図6では、揺動部位A,B,Cになっている期間(図6における各揺動部位の時間軸方向の幅に相当)が、各揺動部位に対応する揺動実施期間となっている。
【0034】
次に本実施形態のマッサージ機10の作用を説明する。使用者はマッサージ機10に着座した状態で、操作部34を操作してマッサージ機10の背もたれ部13を所望のリクライニング角に調整するとともに、オットマン15を所望の角度に調整する。そして、オットマン15で脚を揺動させたいときには、まず操作部34を操作して脚支持部18の昇降位置を調整する。脚支持部18を所望の昇降位置に調整したら、操作部34を操作して脚支持部18の揺動を開始させる。なお、脚支持部18の揺動を開始させる操作方法には、複数用意されたマッサージコースの中から、脚Kの揺動運動を含むコースを選択する方法と、脚Kの揺動運動をそれ単独で選択する方法とがある。
【0035】
使用者は、例えば脚支持部18の昇降位置を、図4(a)〜(c)のいずれかの位置範囲に調整することにより、所望の揺動部位を選択する。マッサージ機10の運転開始に際して、メイン制御部30は、まず第1制御部31を介して脚支持部18の昇降位置情報を取得し、その昇降位置情報(つまり脚支持位置情報)を基に参照データを参照して、その昇降位置に対応する揺動周波数Fを取得する。そして、メイン制御部30は、その取得した揺動周波数Fを指定して揺動周波数制御部32に対して揺動駆動部19の駆動を指示する。揺動周波数制御部32は、その指示された揺動周波数Fが得られる回転速度でモータ25を駆動させ、脚支持部18をその指示された揺動周波数Fで揺動させる。
【0036】
オットマン15の揺動動作中において、使用者による操作部34の操作により、あるいはマッサージコース中の設定により、例えば図6に示すように揺動部位がA,B,Cの順番に切り換わったとする。図6の例では、運転開始初期に揺動周波数F0で準備運転し、その後、揺動部位がA,B,Cの順番に切り換わると、オットマン15は、以下のように運転される。
【0037】
揺動部位Aにあるときの揺動実施期間では脚支持部18が揺動周波数F2で運転され、揺動部位Aから揺動部位Bへ切り換わると、揺動周波数F2から揺動周波数F3に変化する。そして、揺動部位Bにあるときの揺動実施期間では脚支持部18が揺動周波数F3で運転される。さらに、揺動部位Bから揺動部位Cへ切り換わると、揺動周波数F3から揺動周波数F1に変化する。そして、揺動部位Cにあるときの揺動実施期間では脚支持部18が揺動周波数F1で運転される。このように揺動部位A〜Cの変化に応じて揺動周波数も変化するので、脚Kの揺動運動が単調ではなくなり、揺動部位が変化しても揺動周波数が変化しない構成に比べ、より高いマッサージ効果が得られる。
【0038】
以上詳述したように本実施形態によれば、以下の効果が得られる。
(1)オットマン15に左右方向に揺動可能に設けられた脚支持部18に対して脚Kの長手方向に沿って移動する脚支持部18の昇降位置に応じて揺れパターンを変化させる。つまり、脚Kの揺動部位の変化に応じて揺れパターンを変化させる構成とした。このため、各揺動部位に適した気持ち良さ、及びほぐし効果を得ることができる。よって、揺動部位が変化しても揺れパターンが変化しない構成に比べ、より高いマッサージ効果を得ることができる。また、揺動部位の変化に応じて揺れパターンが変化するので、使用者は多様な動作感を得ることができる。
【0039】
(2)オットマン15に設けられた脚支持部18の昇降位置に応じて揺動周波数を変化させる。つまり、脚Kの揺動部位の変化に応じて揺動周波数を変化させる構成とした。このため、揺動部位が変化しても揺動周波数が変化しない構成に比べ、より高いマッサージ効果を得ることができる。
【0040】
(3)揺動部位毎の揺動周波数が一定である揺れパターンを採用した。このため、同じ揺動部位にあるときには一定の揺動周波数に保たれるため、一定のリズムで脚Kを揺動させることができ、高いマッサージ効果を得ることができる。
【0041】
(4)揺動部位変化機構23が揺動部位を変化させるのと略同時に、制御手段(メイン制御部30及び揺動周波数制御部32)が揺動周波数を変化させ、異なる揺動部位に適した異なる揺動周波数に制御するので、各揺動部位に適した気持ち良さ、及びほぐし効果が得られるうえ、揺動部位の変化時点が実感しやすくなり、動作感が向上する。
【0042】
(5)脚支持部18を移動可能に設け、脚の支持位置を変化させることにより、揺動部位を変化させる構成なので、揺動部位変化機構23を比較的簡単に構成できる。
(第2実施形態)
次に第2実施形態を図7に従って説明する。第2実施形態では、オットマン15の揺動周波数は揺動部位が異なっても同じにしつつ揺動部位に応じた異なる揺らぎを与える点が、第1実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0043】
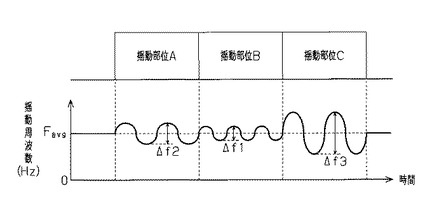
図7に示すように、脚支持部18の昇降位置に応じた揺動部位A,B,C毎の揺れパターンは、揺動周波数の平均値は同じであるが、揺動周波数の揺らぎ方が異なる。図7の例では、揺動部位A,B,C毎の揺動実施期間における揺れパターンは、揺動周波数の平均値は各揺動部位間で同じ一定値Favgとなっている。そして、揺動部位Aに対応する揺れパターンの揺らぎ幅Δf2と、揺動部位Bに対応する揺れパターンの揺らぎ幅Δf1と、揺動部位Cに対応する揺れパターンの揺らぎ幅Δf3は、Δf1<Δf2<Δf3の大小関係にあり、揺動部位毎に異なっている。揺らぎ幅Δf1〜Δf3は、実験的に得られた各揺動部位A,B,C毎に好ましい値に設定されている。なお、揺らぎ周波数は、揺動部位A〜Cで同じであるが、揺らぎ周波数を揺動部位毎に異ならせてもよい。
【0044】
メイン制御部30は、メモリに、揺動部位と、揺らぎ周波数及び揺らぎ幅との対応関係を示す参照データと、平均揺動周波数Favgのデータとを記憶している。メイン制御部30は、脚支持部18の昇降位置から把握される揺動部位に対応する揺らぎ周波数と揺らぎ幅を、参照データを参照して取得する。そして、メイン制御部30は、平均揺動周波数Favgと、揺らぎ周波数及び揺らぎ幅Δfを指定して、揺動周波数制御部32に対して揺動制御を指示する。揺動周波数制御部32は、指示された内容に従って、揺動部位A,B,C毎に、揺動周波数の揺らぎ方が異なるように揺動駆動部19を制御する。なお、参照データは、揺動部位と、揺らぎ1周期分の揺動周波数との対応関係を示すものとし、メイン制御部30は揺動周波数を指定して揺動周波数制御部32に揺動制御を指示する構成も採用できる。また、メイン制御部30が、参照データから取得した揺らぎ周波数及び揺らぎ幅と平均揺動周波数Favgとを基に演算した揺動周波数を指定して揺動周波数制御部32に揺動制御を指示する構成としてもよい。
【0045】
(6)第2実施形態によれば、揺動部位の変化と揺れパターンの変化とが対応付けられた制御として、揺動部位が異なれば、揺動実施期間における揺動周波数の揺らぎ方を異ならせる制御を行う。よって、揺動部位A,B,C毎に、実験的に得られた好ましい揺らぎを与えることにより、揺動部位毎に好ましい揺らぎを与え、使用者は揺動よるほぐし効果と、揺らぎによる気持ちよさを得ることができる。また、揺動部位が変化すると揺らぎ方が変化するので、多様な動作感が得られるうえ、揺動部位の変化を実感しやすくなる。
【0046】
(第3実施形態)
次に第3実施形態を図8に従って説明する。第3実施形態では、揺動部位が変化すると、揺動周波数と揺らぎを共に変化させる点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0047】
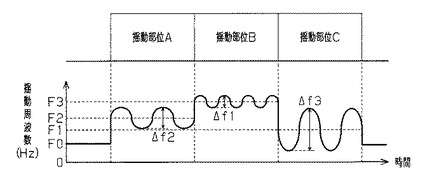
図8に示すように、揺動部位A,B,C毎の揺動実施期間における揺動周波数の平均値が揺動部位間で異なるうえ、揺動周波数の揺らぎ方も揺動部位間で異なるように制御する。図8の例では、揺動部位A,B,C毎の揺動実施期間における揺れパターンは、揺動周波数の平均値はそれぞれF2,F3,F1であり、揺動周波数の揺らぎ幅はそれぞれΔf2,Δf1,Δf3である(Δf1<Δf2<Δf3)。揺らぎ幅Δf1〜Δf3は、実験的に得られた各揺動部位A,B,C毎に好ましい値に設定されている。また、揺らぎ周波数は、揺動部位A,Cで同じで、揺動部位Bが揺動部位A,Cの揺らぎ周波数より高くなっている。もちろん、揺らぎ周波数を揺動部位毎に異ならせてもよい。
【0048】
メイン制御部30は、メモリに、揺動部位と、揺動周波数の平均値、揺らぎ周波数及び揺らぎ幅との対応関係を示す参照データを記憶している。メイン制御部30は、脚支持部18の昇降位置から把握される揺動部位に対応する揺動周波数の平均値と揺らぎ周波数と揺らぎ幅を、参照データを参照して取得する。そして、メイン制御部30は、揺動周波数の平均値と、揺らぎ周波数及び揺らぎ幅Δfを指定して、揺動周波数制御部32に対して揺動制御を指示する。揺動周波数制御部32は、指示された内容に従って、揺動部位A,B,C毎に、揺動周波数の平均値及び揺らぎ方が異なるように揺動駆動部19を制御する。なお、メイン制御部30及び揺動周波数制御部32による揺動制御方法としては、第2実施形態で述べた他の方法も採用できる。
【0049】
(7)第3実施形態によれば、揺動部位の変化と揺れパターンの変化とが対応付けられた制御として、揺動部位が異なれば、揺動実施期間における揺動周波数(平均値)と揺らぎ方とが共に異なる制御を行う。よって、揺動周波数のみ変化させる第1実施形態や、揺らぎ方のみ変化させる第2実施形態に比べ、各揺動部位に適したより高いほぐし効果、及び気持ち良さを得ることができる。さらに、揺動部位の変化を一層実感しやすくなり、使用者がさらなる多様な動作感を得ることができる。
【0050】
(第4実施形態)
次に第4実施形態を図9に従って説明する。第4実施形態では、揺動部位の切り換わり時に揺動周波数を滑らかに変化させる点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0051】
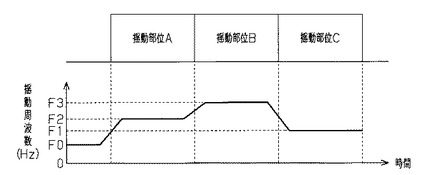
図9に示すように、揺動部位A,B,Cが切り換わるときには、前の揺動周波数から次の揺動周波数へ漸進的に変化する。図9の例では、揺動部位A,B,Cが切り換わるときには、その揺動部位の切り換わり時点(図9における縦の破線)よりも少し前のタイミングから、揺動周波数を一定の変化率で変化させ始め、揺動部位の切り換わり時点の少し後のタイミングで、その揺動部位に対応する揺動周波数に達するようにする。すなわち、揺動部位の切り換わりと略同時に揺動周波数が変化するが、このとき、前の揺動部位に対応する揺動周波数から次の揺動部位に対応する揺動周波数まで、揺動周波数が一定の傾き(揺動周波数変化率)で変化する。
【0052】
メイン制御部30は、メモリに、揺動部位と揺動周波数との対応関係を示す参照データを記憶するとともに、この参照データから取得した切り換わり前後の揺動部位に対応する各揺動周波数の差に応じた揺動周波数変化率を算出する。揺動周波数変化率は、単位時間当たりの揺動周波数の変化量(増加量又は減少量)を示し、揺動周波数を高くするときには正の値をとり、揺動周波数を低くするときには負の値をとる。
【0053】
メイン制御部30は、操作部34から脚支持部18の上昇又は下降を指示する操作信号を入力すると、現在の揺動部位に対応する揺動周波数と次の揺動部位に対応する揺動周波数との差を求め、その差を予め定められた変化実施時間で割って揺動周波数変化率を算出する。そして、メイン制御部30は、脚支持部18が上昇又は下降して次の揺動部位に切り換わる手前のタイミング(例えば変化実施期間の半分の時間だけ手前)から、揺動周波数を、先に算出した揺動周波数変化率で変化させる。この揺動周波数制御は、メイン制御部30が揺動周波数制御部32に対してその時々の揺動周波数を指示することにより行われる。この結果、図9に示すように、揺動部位の切り換わり時点より少し前のタイミングから揺動周波数が変化し始め、揺動部位の切り換わり時点に少し遅れて次の揺動周波数に到達し、揺動周波数が滑らかに変化する。
【0054】
(8)第4実施形態によれば、揺動部位A,B,Cの切り換わり時に揺動周波数が漸進的に変化するので、第1実施形態(図6)のように揺動周波数が急に変化する構成に比べ、揺動周波数の変化による身体への負担を軽減することができる。
【0055】
(第5実施形態)
次に第5実施形態を図10に従って説明する。第5実施形態では、揺動部位が変化すると揺動周波数を変化させる期間と、揺動部位が変化しても揺動周波数を変化させない期間とが混在する揺動制御が行われる点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0056】
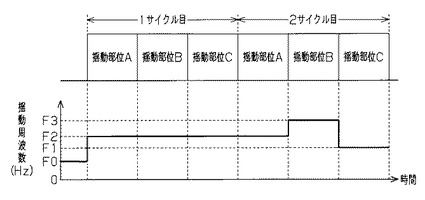
図10は、マッサージ機10に設定された1つのマッサージモードの時間と揺動周波数との関係を示す。このマッサージモードは、複数の期間(サイクル)に分かれ、1つのサイクルで揺動部位がA,B,Cの順番に変化する。1サイクル目では、揺動部位がA,B,Cと変化しても揺動周波数は変化することなく一定値に保持され、2サイクル目では、揺動部位がA,B,Cと変化すると、揺動部位毎に異なる揺動周波数に変化する。
【0057】
メイン制御部30のメモリには、このマッサージモード中のサイクル毎に、どの揺動部位も同じ一定の揺動周波数とする第1サイクルであるか、揺動部位毎に揺動周波数を変化させる第2サイクルであるかを判別するためのフラグが書き込まれた設定データが記憶されている。また、メイン制御部30のメモリには、第2サイクル用に、揺動部位と揺動周波数との対応関係を示す参照データが記憶されている。
【0058】
メイン制御部30は、マッサージ機10が上記マッサージモードで運転されているとき、設定データを参照して、現在のnサイクル目(但しnは1,2,…,k)が第1サイクルであるか第2サイクルであるかを判断する。例えば図10に示す1サイクル目であれば、設定データのフラグから第1サイクルであると判断され、メイン制御部30は、揺動部位が変化しても一定の揺動周波数F2に保持する。一方、図10に示す2サイクル目であれば、設定データのフラグから第2サイクルであると判断される。よって、メイン制御部30は、揺動部位が変化すると、参照データを参照してその変化後の揺動部位に対応する揺動周波数を取得し、オットマン15をその揺動周波数に変化させる。こうして図10に示すように、2サイクル目では揺動部位の変化に応じて揺動周波数が変化する。3サイクル目以降も同様の揺動制御が行われる。なお、揺動制御は、揺動周波数制御部32が、メイン制御部30から指定された揺動周波数に揺動駆動部19を制御することにより行われる。
【0059】
(9)第5実施形態によれば、マッサージモード中に揺動部位の変化に応じて揺動周波数を変化させるサイクル(期間)と、揺動周波数を変化させないサイクル(期間)とがあるので、揺動周波数の変化による効果をより実感できるとともに、揺動周波数の変化に対する身体への負担も少なくなる。また、揺動のバリエーションが増え、より高いマッサージ効果が得られる。
【0060】
(第6実施形態)
次に第6実施形態を図11に従って説明する。第6実施形態では、揺動部位変化機構を複数のエアバッグを使用しその膨縮により脚の支持位置(把持位置)を変化させる機構とした点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0061】
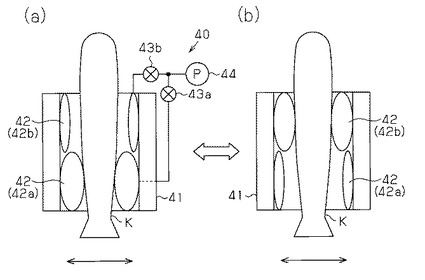
図11(a)に示すように、揺動部位変化手段としての揺動部位変化機構40は、前記第1実施形態と同様の揺動駆動部19により左右方向に揺動可能な左右1組の脚支持部41(同図では一方のみ図示)を備える。但し、脚支持部41は、連結ベース部24(図3参照)に固定されており、第1実施形態の脚支持部18よりも脚Kの長手方向の長さが長く形成されている。脚支持部41の内側には、脚を左右両側から把持するための複数のエアバッグ42が、脚Kの長手方向(図11の上下方向)に沿って複数組(図11では2組)配置されている。各エアバッグ42は、切換弁43a,43bを介してエアポンプ44の吐出口に接続されている。揺動周波数制御部32(図5参照)は、エアポンプ44の駆動状態で切換弁43a,43bを切り換えることにより、複数組のエアバッグ42のうち膨張させる1組を選択する。詳しくは、切換弁43aは、下段のエアバッグ42aに対して給気を行う給気位置と排気を行う排気位置とに切り換えられる。また、切換弁43bは、上段のエアバッグ42bに対して給気を行う給気位置と排気を行う排気位置とに切り換えられる。
【0062】
第1制御部31は、揺動部位変化機構40のエアポンプ44を駆動制御するとともに、切換弁43a,43bの切換え制御を行う。操作部34により脚Kの把持位置を下降させる操作がなされると、第1制御部31は、エアポンプ44を駆動するとともに、切換弁43aを給気位置に、切換弁43bを排気位置にそれぞれ切り換える。この結果、図11(a)に示すように、下段のエアバッグ42aが膨張するとともに上段のエアバッグ42bが収縮し、下段のエアバッグ42aにより下腿の下部が把持される。一方、操作部34により脚Kの把持位置を上昇させる操作がなされると、第1制御部31は、エアポンプ44を駆動するとともに、切換弁43aを排気位置に、切換弁43bを給気位置にそれぞれ切り換える。この結果、図11(b)に示すように、下段のエアバッグ42aが収縮するとともに上段のエアバッグ42bが膨張し、上段のエアバッグ42bにより下腿の上部が把持される。
【0063】
本実施形態のマッサージ機10における揺動制御に係る電気的構成は、図5と基本的に同様であるが、図5における揺動部位変化機構23に替えてエアバッグ式の揺動部位変化機構40になっている他、脚Kの支持位置を検出するセンサ35を備えていない。第1制御部31は、脚Kの把持位置を指定して複数組のエアバッグ42a,42bの膨張と収縮の制御信号を揺動部位変化機構40に出力することにより、エアバッグ42による把持制御を行う。このため、第1制御部31は、制御信号を出力した時点でエアバッグ42による把持位置を把握している。詳しくは、第1制御部31は、下段を把持位置に指定してエアバッグ42の膨張と収縮の制御信号を出力したときには、下段のエアバッグ42aが把持位置であることを把握しており、上段を把持位置に指定してエアバッグ42の膨張と収縮の制御信号を出力したときには、上段のエアバッグ42bが把持位置であることを把握している。
【0064】
メイン制御部30は、エアバッグ42の把持位置に対応する揺動部位を基に参照データを参照して揺動制御に必要な揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、把持位置(揺動位置)に対応する揺動部位の変化に応じて揺動周波数を変化させる。なお、メイン制御部30及び揺動周波数制御部32は、参照データから取得される揺動部位に対応する揺動周波数制御情報に基づき、図6〜図10のいずれかのグラフで示される揺動部位に対応する揺れパターンで揺動制御を行う。
【0065】
(10)第6実施形態によれば、脚支持部41に設けた複数組のエアバッグ42を膨縮制御し、脚の把持位置を変化させる構成としたので、簡便な構成で揺動部位変化機構23が実現できる。また、エアバッグ42の膨縮により脚Kの把持位置(つまり揺動位置)を変化させるので、第1実施形態における脚支持部18に比べ、脚Kの揺動位置をしっかり保持できる。また、エアバッグ式の揺動部位変化機構23であるため、脚の着衣が脚支持部18の昇降に伴ってずれる事態も回避できる。さらに、図6〜図10に示す揺れパターンの採用によって、脚の揺動運動を行うときに、前記第1〜第5実施形態と同様の効果を得ることができる。
【0066】
(第7実施形態)
次に第7実施形態を図12〜図15に従って説明する。第7実施形態では、身体の揺動支点を変化させて揺動部位を変化させる構成である点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0067】
図12に示すように、マッサージ機10は、第1実施形態と同様に、座部12、背もたれ部13及びオットマン15を備える。オットマン15には、第1実施形態と同様の揺動駆動部19(図3、図13参照)の駆動により、左右方向に揺動可能な脚支持部18が設けられている。図12では、脚支持部18を、説明の便宜上、板状に描いているが、実際は第1実施形態と同様に平面視で断面U字状の形状を有している。但し、脚支持部18は、昇降式でも固定式でもよい。また、脚支持部18は、第6実施形態のエアバッグ42を備えた脚支持部41とすることもできる。
【0068】
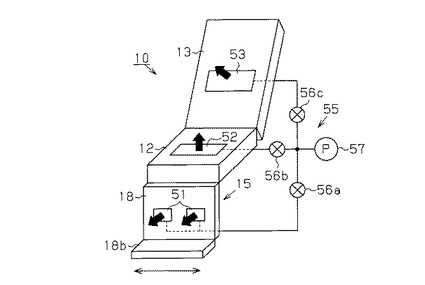
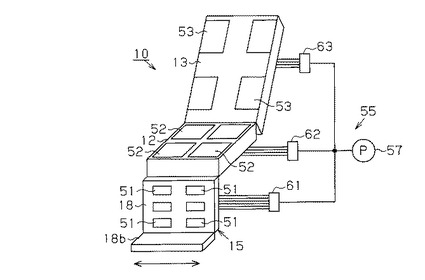
本実施形態のマッサージ機10では、脚支持部18にエアバッグ51が設けられ、座部12にエアバッグ52が設けられ、さらに背もたれ部13にエアバッグ53が設けられている。各エアバッグ51〜53は図12における矢印で示す方向へ個別に膨張可能である。エアバッグ51〜53のうち膨張した一つが身体の対応する箇所、すなわち下腿、臀部、背中のうち一つを裏側(背面側)から押し上げる。その押し上げられた箇所で身体が支持され、膨張させるエアバッグの選択により身体の支持位置を変化させることにより、オットマン15が揺動したときの身体の揺動支点が変化する。各エアバッグ51〜53は、身体の支持位置を変化させる支持位置変化機構55の一部を構成している。また、本実施形態の脚支持部18の先端側には、足を載置可能な足載置部18bが脚支持部18に対して角度変更可能な状態で連結されている。なお、図12では、椅子の脚部11は省略している。また、本実施形態では、支持位置変化機構55が揺動部位変化手段に相当し、エアバッグ51〜53が複数の支持部に相当する。
【0069】
図12に示すように、支持位置変化機構55は、各エアバッグ51〜53と接続される切換弁56a,56b,56cと、切換弁56a,56b,56cを介して各エアバッグ51〜53へエアを供給するエアポンプ57とを備えている。切換弁56a,56b,56cを切り換えることにより、各エアバッグ51〜53のうち膨張させる一つ又は1組を選択する。切換弁56a,56b,56cは対応するエアバッグ51,52,53に対して給気を行う給気位置と排気を行う排気位置とに切り換えられる。なお、切換弁56a,56b,56cの全てを給気位置に切り換えたり、排気位置に切り換えたりすることにより、エアバッグ51〜53の全てを膨張させたり、全てを収縮させたりすることも可能である。
【0070】
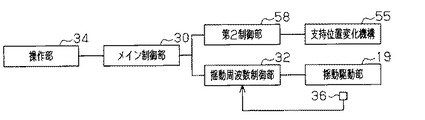
図13に示すように、メイン制御部30には、支持位置変化機構55を駆動制御する第2制御部58と、揺動周波数制御部32とが電気的に接続されている。第2制御部58は、支持位置変化機構55を構成するエアポンプ57の駆動制御と、切換弁56a,56b,56c(いずれも図12参照)の切換え制御とを司る。
【0071】
第2制御部58は、身体の支持位置を指定して複数のエアバッグ51〜53の膨張と収縮の制御信号を支持位置変化機構55に出力することにより、エアバッグ51〜53による支持制御を行う。このため、第2制御部58は、制御信号を出力した時点でエアバッグ51〜53による支持位置を把握している。
【0072】
メイン制御部30は、支持位置を基に参照データを参照して揺動制御に必要な揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、支持位置から決まる揺動支点を支点とする身体の揺動部位の変化に応じて、揺動周波数を変化させる。なお、メイン制御部30及び揺動周波数制御部32は、参照データから取得される揺動部位に対応する揺動周波数制御情報に基づき、図6〜図10のいずれかのグラフで示される揺動部位に対応する揺れパターンで揺動制御を行う。
【0073】
次に本実施形態のマッサージ機10の作用を説明する。
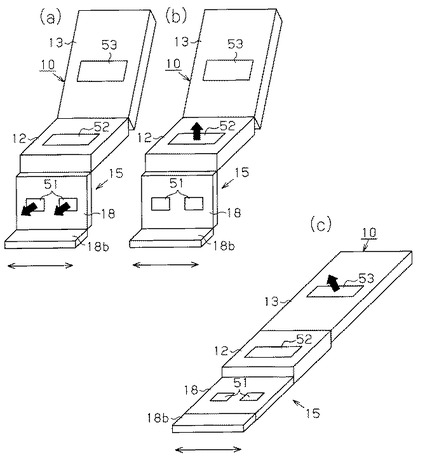
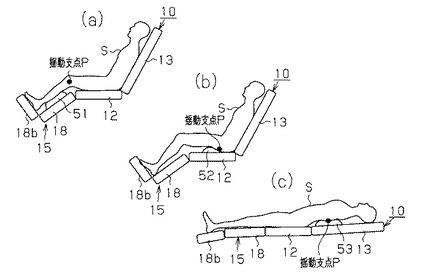
操作部34により身体Sの支持位置を下降させる操作がなされると、第2制御部58は、エアポンプ57を駆動するとともに、切換弁56aを給気位置に、他の切換弁56b,56cを排気位置にそれぞれ切り換える。この結果、図15(a)に示すように、脚支持部18のエアバッグ51のみが膨張して下腿が押し上げ支持される。このように下腿が支持された状態では、例えば膝部が揺動支点Pとなり、下腿と足が揺動部位となる。また、操作部34により身体Sの支持位置を上昇させる操作がなされると、第2制御部58は、エアポンプ57を駆動するとともに、切換弁56bを給気位置に、他の切換弁56a,56cを排気位置にそれぞれ切り換える。この結果、図15(b)に示すように、座部12のエアバッグ52のみが膨張して臀部が押し上げ支持される。この場合、臀部が揺動支点Pとなり、脚全体が揺動部位となる。また、揺動部位をさらに広い範囲としたい場合、操作部34を操作して、図14(c),図15(c)に示すように椅子をフラットな状態に角度調整したうえで、操作部34により身体Sの支持位置を上昇させる操作を行う。この操作信号を入力した第2制御部58は、エアポンプ57を駆動するとともに、切換弁56cを給気位置に、他の切換弁56a,56bを排気位置にそれぞれ切り換える。この結果、図15(c)に示すように、椅子がフラットになって身体Sが仰臥姿勢にある状態で背もたれ部13のエアバッグ53のみが膨張し、背中が押し上げ支持される。この場合、背中の支持位置が揺動支点Pとなり、腰を含む下半身が揺動部位となる。
【0074】
このように身体Sの支持位置が変化することにより揺動支点Pが変化し、これに伴い揺動部位が変化する。そして、本実施形態では、エアバッグ51〜53のうち膨張させるものの位置(身体支持位置)から規定される揺動部位に応じて、オットマン15を揺動させる際の揺れパターンが、図6〜図10のグラフに示すように変化する。また、脚支持部18としてエアバッグ式の脚支持部41(図11)を採用した構成の場合は、エアバッグ42による脚Kの把持位置の変化と、エアバッグ51〜53の押上げによる支持位置の変化を組み合わせることができる。
【0075】
(11)第7実施形態によれば、椅子に複数のエアバッグ51〜53を配置し、膨張させるエアバッグの位置を変化させて身体Sの支持位置を変えることにより、揺動支点Pを変えて揺動部位を変化させる構成なので、比較的簡単な構成で身体の揺動部位を変化させることができる。また、膨張させるエアバッグ51〜53の位置(身体支持位置)の変化に応じた身体の揺動部位の変化に対応して、オットマン15の揺れパターンを変化させるので、ほぐし効果を高めることができる。さらに、脚に限らず、身体の広い部分を揺動部位にできるので、脚に限らず、腰、背筋など身体全体のほぐし効果が得られる。また、図6〜図10に示す揺れパターンの採用によって、身体の揺動運動を行うときに、前記第1〜第5実施形態と同様の効果を得ることができる。
【0076】
(第8実施形態)
次に第8実施形態を図16〜図20に従って説明する。第8実施形態では、リクライニング機構などの傾動機構の傾動角を変化させて、使用者の姿勢を変化させることにより揺動部位を変化させる構成である点が、前記各実施形態と異なる。なお、前記各実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0077】
図16に示すように、マッサージ機10には、オットマン15の脚支持部18に左右列に3個ずつの計6個のエアバッグ51が設けられ、座部12に4個のエアバッグ52が設けられ、さらに背もたれ部13に4個のエアバッグ53が設けられている。詳しくは、脚支持部18には、上段・中段・下段のそれぞれに左右一対ずつのエアバッグ51が内装されている。また、座部12には、前側・後側のそれぞれに左右一対ずつのエアバッグ52が内装されている。さらに、背もたれ部13には、上段・下段のそれぞれに左右一対ずつのエアバッグ53が内装されている。なお、図16では、脚支持部18を、説明の便宜上、板状に描いているが、実際は第1実施形態と同様に平面視で断面U字状の形状を有している。但し、脚支持部18は、昇降式でも固定式でもよい。また、脚支持部18は、第6実施形態のエアバッグ42を備えた脚支持部41とすることもできる。
【0078】
各エアバッグ51〜53は個別に膨張・収縮が可能である。エアバッグ51〜53のうち膨張した一つが身体の対応する箇所、すなわち下腿、臀部、背中のうちの一つを押し上げ、その押し上げられた箇所で身体が支持される。この身体の支持位置の変化に応じて、オットマン15が揺動したときの身体の揺動支点が変化する。このため、本実施形態の各エアバッグ51〜53等も、前記第7実施形態と同様に、支持位置変化機構55を構成している。
【0079】
図16に示すように、支持位置変化機構55は、複数個(6個)の各エアバッグ51と接続される第1切換弁61と、複数個(4個)の各エアバッグ52と接続される第2切換弁62と、複数個(4個)の各エアバッグ53と接続される第3切換弁63とを備えている。各切換弁61〜63は、接続された複数のエアバッグを個別に膨張・収縮できる給気位置と排気位置とに切り換えられる複数の切換弁を含む切換弁群により構成されている。各切換弁61〜63が切り換え制御されることにより、6個のエアバッグ51、4個のエアバッグ52、4個のエアバッグ53を個別に膨張収縮することが可能である。本実施形態では、脚支持部18、座部12、背もたれ部13毎に複数個設けられたエアバッグの個々を個別に膨張収縮させることにより、膨張させるエアバッグの組合せによって、身体の支持位置の変更の他、例えば対角に位置するエアバッグを膨張させることなどにより、身体にひねりを加えることも可能である。
【0080】
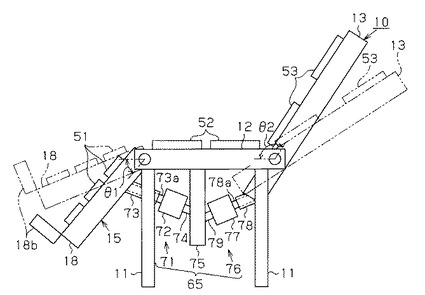
本実施形態のマッサージ機10は、図17に示す姿勢調整機構65を備えている。図17に示すように、座部12の下側に設けられた姿勢調整機構65は、座部12に対するオットマン15(つまり脚支持部18)の傾動角θ1を変更する第1角度調整機構71と、座部12に対する背もたれ部13の傾動角θ2を変更する第2角度調整機構76とを備えている。第1角度調整機構71は、動力源となる第1モータ72と、第1モータ72の出力軸に接続されるボールねじ73aを有する第1伸縮体73とを備える。第1モータ72は、座部12の下面から下方へ延出する支持フレーム75に対して支持軸74を介して姿勢変更可能に支持されている。第1伸縮体73の第1モータ72側と反対側の端部は、脚支持部18に対して回動可能に連結されている。
【0081】
第1伸縮体73は、第1モータ72が正転駆動されてボールねじ73aが正転することにより伸長し、この伸長により、脚支持部18は傾動角θ1が小さくなる方向(つまり二点鎖線で示す上昇側)に傾動する。一方、第1伸縮体73は、第1モータ72が逆転駆動されてボールねじ73aが逆転することにより収縮し、この収縮により、脚支持部18は傾動角θ1が大きくなる方向(つまり実線で示す下降側)に傾動する。
【0082】
一方、第2角度調整機構76には、動力源となる第2モータ77と、第2モータ77の出力軸に接続されるボールねじ78aを有する第2伸縮体78とを備える。第2モータ77は、支持フレーム75に対して支持軸79を介して姿勢変更可能に支持されている。第2伸縮体78の第2モータ77側と反対側の端部は、背もたれ部13の基端部に対して回動可能に連結されている。
【0083】
第2伸縮体78は、第2モータ77が正転駆動されてボールねじ78aが正転することにより伸長し、この伸長により、背もたれ部13は傾動角θ2が小さくなる方向(つまり実線で示す上昇側)に傾動する。一方、第2伸縮体78は、第2モータ77が逆転駆動されてボールねじ78aが逆転することにより収縮し、この収縮により、背もたれ部13は傾動角θ2が大きくなる方向(つまり二点鎖線で示す下降側)に傾動する。
【0084】
マッサージ機10は、姿勢調整機構65の駆動により、例えば図17に実線で示す椅子の姿勢に調整されたり、同図に二点鎖線で示すリクライニング姿勢に調整されたりする。なお、姿勢調整機構65は、前記第1〜第7実施形態にも設けられている。また、本実施形態では、姿勢調整機構65が、揺動部位変化手段に相当する。
【0085】
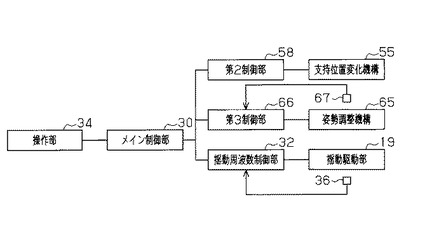
図18に示すように、メイン制御部30には、支持位置変化機構55を駆動制御する第2制御部58と、姿勢調整機構65を駆動制御する第3制御部66と、揺動駆動部19を駆動制御する揺動周波数制御部32とが電気的に接続されている。第2制御部58は、支持位置変化機構55を構成するエアポンプ57の駆動制御と、各切換弁61〜63の切換え制御とを司る。
【0086】
第2制御部58は、身体の支持位置を指定して複数のエアバッグ51〜53の膨張と収縮の制御信号を支持位置変化機構55に出力することにより、エアバッグ51〜53による支持制御を行う。このため、第2制御部58は、制御信号を出力した時点でエアバッグ51〜53による身体の支持位置を把握している。
【0087】
メイン制御部30は、操作部34から姿勢調整指示信号を入力すると、その信号で指示された姿勢に調整すべく第3制御部66に対して姿勢調整機構65の駆動制御を指示する。姿勢調整機構65には、オットマン15(つまり脚支持部18)の傾動角θ1と、背もたれ部13の傾動角θ2とを個別に検出可能なセンサ67が設けられている。センサ67としては、例えば角度センサが用いられる。第3制御部66は、背もたれ部13を後方へ倒す方向へ操作されたときは、背もたれ部13及びオットマン15を図17に二点鎖線で示す側へ傾動させ、一方、背もたれ部13が起き上がる方向へ操作されたときは、背もたれ部13及びオットマン15を図17に実線で示す側へ傾動させる。このときの傾動角θ1,θ2はセンサ67の検出値から取得される。
【0088】
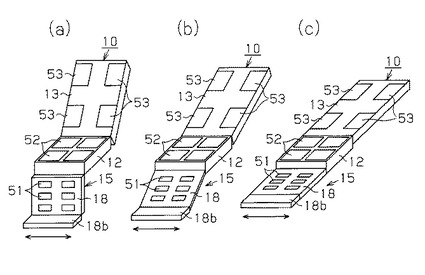
メイン制御部30は、第3制御部66を介してセンサ67が検出した傾動角θ1,θ2を取得し、傾動角θ1,θ2を基にマッサージ機10の姿勢を判定する。例えば、メイン制御部30は、傾動角θ1,θ2を基に、図19(a)に示す椅子の姿勢(θ2が「小」の姿勢)であるか、図19(b)に示すやや傾動させたリラックス姿勢(θ2が「中」の姿勢)であるか、図19(c)に示すライニング姿勢(寝姿勢)(θ2が「大」の姿勢)であるかを判定する。これらの姿勢の違いによって、オットマン15を左右方向に揺動させた際の身体の揺動支点Pが変化し、この揺動支点Pの変化によって身体の揺動部位が変化する。なお、傾動角θ1,θ2のうち、座部12に対する背もたれ部13の傾動角θ2のみから姿勢を判断してもよい。
【0089】
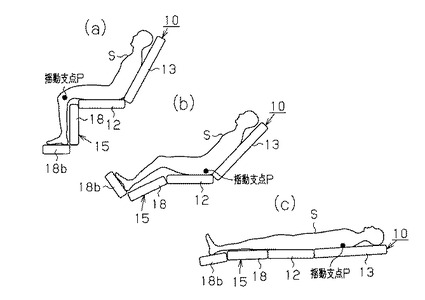
マッサージ機10が、例えば図20(a)に示す椅子の姿勢にあるときは、身体Sの揺動支点Pは膝に位置し、下腿と足が揺動部位となる。また、図20(b)に示すリラックス姿勢にあるときは、身体Sの揺動支点Pは臀部に位置し、この脚部全体が揺動部位となる。さらに、図20(c)に示すライニング姿勢にあるときは、身体Sの揺動支点Pは背中上部に位置し、ほぼ全身(詳しくは背中上部から足先までの範囲)が揺動部位となる。なお、揺動支点Pは、マッサージ機10の姿勢の他、座部12や背もたれ部13等のクッション性など他の要因にも依存して変化するため、図20に示す揺動支点Pは一例に過ぎない。
【0090】
図18に示すメイン制御部30は、メモリに、傾動角θ1,θ2から決まる姿勢と、揺れパターンとの対応関係を示す参照データを記憶している。メイン制御部30は、姿勢(傾動角θ1,θ2)を基に、参照データを参照して揺動制御に必要な揺動周波数制御情報を取得し、その揺動周波数制御情報に基づき揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、姿勢から決まる揺動支点Pを支点とする身体の揺動部位の変化に応じて、揺動周波数を変化させる。
【0091】
次に本実施形態のマッサージ機10の作用を説明する。
操作部34により姿勢を変化させる操作がなされると、メイン制御部30からの指示に従って、第3制御部66は各モータ72,77を駆動する。マッサージ機10が図19(a)に示す椅子の姿勢になった場合、図20(a)に示すように、揺動支点Pが膝となり、下腿と足が揺動部位となる。また、マッサージ機10が図19(b)に示すリラックス姿勢になった場合、図20(b)に示すように、揺動支点Pが臀部となり、脚部全体が揺動部位となる。さらに、マッサージ機10が図19(c)に示すライニング姿勢になった場合、図20(c)に示すように、揺動支点Pが背中上部となり、ほぼ全身が揺動部位となる。
【0092】
メイン制御部30は、センサ67が検出した傾動角θ1,θ2に基づき姿勢を判定し、その判定した姿勢を基に参照データを参照して、姿勢に対応する揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、姿勢の変化に応じた異なる揺れパターンで、オットマン15の揺動制御を行う。
【0093】
図6〜図10のグラフで示す揺れパターンが採用される例では、姿勢に応じて、揺動部位が、図20(a)に示すように下腿と足の場合と、図20(b)に示すように脚部全体の場合と、図20(c)に示すようにほぼ全身の場合とで、各グラフで示すような異なる揺れパターンでオットマン15の揺動が行われる。
【0094】
さらに、本実施形態では、エアバッグ51〜53のうち膨張させるエアバッグの位置から規定される身体の支持位置と、姿勢調整機構65による姿勢との組合せにより、揺動支点Pがさらに多様に変化する。そして、メイン制御部30がメモリに記憶する参照データには、エアバッグ51〜53による身体の支持位置と、姿勢調整機構65による姿勢との組合せから決まる身体の揺動部位と揺れパターンとの対応関係も設定されている。また、脚支持部18として、エアバッグ42を備えた脚支持部41(図11)を採用する構成の場合は、メイン制御部30がメモリに記憶する参照データには、エアバッグ42による脚Kの把持位置と、エアバッグ51〜53による身体の支持位置と、姿勢調整機構65による姿勢との組合せから決まる身体の揺動部位と揺れパターンとの対応関係が設定されている。メイン制御部30は揺動部位を特定すると、参照データを参照してその揺動部位に対応する揺動周波数制御情報を取得し、その周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。この結果、オットマン15の脚支持部18は、身体の揺動部位に応じて、図6〜図10のグラフに示す揺れパターンで揺動する。
【0095】
(12)第8実施形態によれば、マッサージ機10の姿勢を変化させることにより、揺動支点Pを変化させる構成なので、比較的簡単な構成で揺動部位を変化させることができる。マッサージ機10の姿勢の変化(つまり身体の揺動部位の変化)に応じて、オットマン15の揺動時における揺れパターンを変化させるので、身体をほぐす効果を高めることができる。また、図6〜図10に示す揺れパターンの採用によって、脚部以外の身体のより広い部位を揺動させるときにも、前記第1〜第5実施形態と同様の効果を得ることができる。また、エアバッグ51〜53の膨張・収縮により身体のひねり等の姿勢を変化させることもできるので、脚支持部18や背もたれ部13の傾動角θ1,θ2を変更する機構との組合せにより、より様々な姿勢に変化させることができる。そして、種々の姿勢に応じた揺動部位の変化に応じて揺れパターンを変化させるので、種々の姿勢に応じた適切な揺れパターンで身体の一部を揺動させ、より高いほぐし効果を得ることができる。
【0096】
(第9実施形態)
次に第9実施形態を図21に従って説明する。なお、以下に示す第9〜第13実施形態は、身体の揺動部位が大きいほど、つまり揺動支点Pを支点として揺動するときの揺動腕長さが長いほど、揺動周波数を低くする点が、前記各実施形態と異なる。この第9実施形態は、第1実施形態と基本構成は同じであり、揺動部位と揺れパターンとの対応関係のみ異なる。第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0097】
図21に示すように、脚支持部18の昇降位置に応じて揺動部位は変化する。例えば図21(a)に示すように、脚支持部18が下降位置にあるときは、下腿の下部と足が揺動部位となる。この場合、揺動部位が比較的小さく、揺動腕長さが比較的短い。また、図21(c)に示すように、脚支持部18が上昇位置にあるときは、大腿を含む脚全体が揺動部位となる。この場合、揺動部位が比較的大きく、揺動腕長さが比較的長い。そして、図21(b)に示すように、脚支持部18が中間位置にあるときは、下腿全体が揺動部位となる。この場合、揺動部位は、下降位置と上昇位置にあるときの各揺動部位の中間の大きさとなり、揺動腕長さも同様に中間の長さになる。
【0098】
メイン制御部30がメモリに記憶する参照データは、脚支持部18の昇降位置から決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、脚支持部18の昇降位置に基づき参照データを参照し、揺動部位が大きいほど、揺動周波数のより低い揺れパターンの揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0099】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、脚支持部18が図21(a)に示す下降位置にあるときに高い揺動周波数F3とし、図21(c)に示す上昇位置にあるときに低い揺動周波数F1とし、図21(b)に示す中間位置にあるときに中間の揺動周波数F2とする(F3>F2>F1)。また、図7〜図10に示す揺れパターンを採用した場合、図21(a)が図7〜図10における揺動部位Bに相当し、図21(b)が同じく揺動部位Aに相当し、図21(c)が同じく揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位A,B,Cに応じた揺れパターンでオットマン15を揺動制御する。
【0100】
(13)第9実施形態によれば、脚支持部18の支持位置を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンで揺動させるので、脚Kの揺動部位の揺動量を好適に大きくすることができ、脚Kをほぐす効果を高めることができる。
【0101】
(第10実施形態)
次に第10実施形態を図22に従って説明する。本実施形態は、第6実施形態と同様のエアバッグ式の脚支持部41を有するオットマンを備えたマッサージ機であり、前記第9実施形態と同様に、身体の揺動部位が大きいほど、揺動周波数のより低い揺れパターンを採用する点に特徴がある。なお、第6実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0102】
図22(a)に示すように、下段のエアバッグ42aのみが膨張して下腿の下部を把持するときは、下腿の下部と足が揺動部位となり、揺動部位が比較的小さい(揺動腕長さが短い)。また、図22(b)に示すように、上段のエアバッグ42bのみが膨張して下腿の上部を把持するときは、脚全体が揺動部位となり、揺動部位が比較的大きい(揺動腕長さが長い)。
【0103】
メイン制御部30がメモリに記憶する参照データは、膨張したエアバッグ42の位置(つまり脚の支持位置)から決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、膨張したエアバッグ42の位置に基づき参照データを参照し、揺動部位が大きいほど、揺動周波数のより低い揺れパターンの揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0104】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、下段のエアバッグ42aのみが膨張して下腿の下部を把持するときは、相対的に高い揺動周波数F2とし、図22(b)に示すように、上段のエアバッグ42bのみが膨張して下腿の上部を把持するときは、相対的に低い揺動周波数F1とする(F2>F1)。
【0105】
また、図7〜図10に示す揺れパターンを採用した場合、図22(a)が図7〜図10における揺動部位Bに相当し、図22(b)が同じく揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位B,Cに応じた揺れパターンでオットマン15を揺動制御する。なお、本実施形態では、揺動部位が二段階で変化するため、図6〜図10における揺動部位Aは省かれる。
【0106】
(14)第10実施形態によれば、エアバッグ42の膨張位置を変化させて脚Kの支持位置を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンでオットマン15を揺動制御する。このため、脚Kの揺動部位の揺動量を好適に大きくすることができ、脚Kをほぐす効果を高めることができる。
【0107】
(第11実施形態)
次に第11実施形態を図23に従って説明する。本実施形態は、第7実施形態と同様のエアバッグ51〜53を備えたマッサージ機であり、前記第9及び第10実施形態と同様に、身体の揺動部位が大きいほど、揺動周波数のより低い揺れパターンを採用する点に特徴がある。なお、第7実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0108】
図23(a)に示すように、脚支持部18のエアバッグ51のみが膨張して下腿を支持するときは、下腿と足が揺動部位となる。この場合、揺動部位が比較的小さく、揺動腕長さが比較的短い。また、図23(c)に示すように、背もたれ部13のエアバッグ53のみが膨張して背中を支持する状態で、かつ椅子が図14(c),図15(c)に示すようにフラットになった状態では、脚と腰を含む下半身全体が揺動部位となる。この場合、揺動部位が比較的大きく、揺動腕長さが比較的長い。さらに図23(b)に示すように、座部12のエアバッグ52のみが膨張して臀部を支持するときは、脚全体が揺動部位となる。この場合、揺動部位は、相対的に中間の大きさとなり、揺動腕長さも同様に中間の長さになる。
【0109】
メイン制御部30がメモリに記憶する参照データは、エアバッグ51〜53のうち膨張した一つの位置から決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、エアバッグ51〜53のうち膨張した一つの位置に基づき参照データを参照し、そのときの揺動部位に対応する揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0110】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、図23(a)に示すように、脚支持部18のエアバッグ51のみが膨張し揺動部位が比較的小さいときは、オットマン15を高い揺動周波数F3で揺動させる。また、図23(c)に示すように、背もたれ部13のエアバッグ53のみが膨張し、かつ椅子が図14(c),図15(c)に示すようにフラットになった状態で揺動部位が比較的大きいときは、オットマン15を低い揺動周波数F1で揺動させる。さらに、図23(b)に示すように、座部12のエアバッグ52のみが膨張し揺動部位が中間の大きさのときは、オットマン15を中間の揺動周波数F2で揺動させる。
【0111】
また、図7〜図10に示す揺れパターンを採用した場合、図23(a)が図7〜図10における揺動部位Bに相当し、図23(b)が揺動部位Aに相当し、図23(c)で椅子がフラットな状態が揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位A,B,Cに応じた揺れパターンでオットマン15を揺動制御する。
【0112】
(15)第11実施形態によれば、エアバッグの膨張位置を変化させて揺動支点を変えることにより揺動部位を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンで揺動させるので、身体の揺動部位の揺動量を好適に大きくすることができ、身体をほぐす効果を高めることができる。
【0113】
(第12実施形態)
次に第12実施形態を図24に従って説明する。本実施形態は、第8実施形態と同様の姿勢調整機構65を備えたマッサージ機であり、前記第9〜第11実施形態と同様に、身体の揺動部位が大きいほど、揺動周波数のより低い揺れパターンを採用する点に特徴がある。なお、第8実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0114】
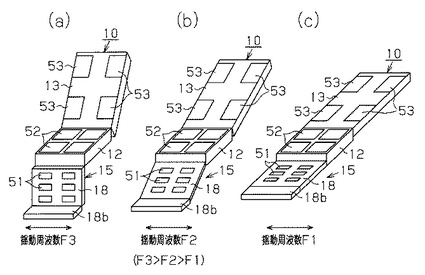
図24(a)に示すように、マッサージ機10が椅子の姿勢にあるときは、下腿と足が揺動部位となる(図20(a)参照)。この場合、揺動部位が比較的小さく、揺動腕長さが比較的短い。また、図24(c)に示すように、マッサージ機10がライニング姿勢にあるときは、背中上部から足先までのほぼ全身が揺動部位となる(図20(c)参照)。この場合、揺動部位が比較的大きく、揺動腕長さが比較的長い。さらに、図24(b)に示すように、マッサージ機10がリラックス姿勢にあるときは、脚部全体が揺動部位となる(図20(b)参照)。この場合、揺動部位は、相対的に中間の大きさとなり、揺動腕長さも同様に中間の長さになる。
【0115】
メイン制御部30がメモリに記憶する参照データは、姿勢に応じて決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、姿勢に基づき参照データを参照して、そのときの揺動部位に対応する揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0116】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、図24(a)に示すように、マッサージ機10が椅子の姿勢にあり揺動部位が比較的小さいときは、オットマン15を高い揺動周波数F3で揺動させる。また、図24(c)に示すように、マッサージ機10がライニング姿勢にあり揺動部位が比較的大きいときは、オットマン15を低い揺動周波数F1で揺動させる。さらに、図24(b)に示すように、マッサージ機10がリラックス姿勢にあり揺動部位が中間の大きさのときは、オットマン15を中間の揺動周波数F2で揺動させる。
【0117】
また、図7〜図10に示す揺れパターンを採用した場合、図24(a)が図7〜図10における揺動部位Bに相当し、図24(b)が揺動部位Aに相当し、図24(c)が揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位A,B,Cに応じた揺れパターンでオットマン15を揺動制御する。
【0118】
(16)第12実施形態によれば、マッサージ機10の姿勢を変化させて身体の揺動支点Pを変えることにより身体の揺動部位を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンで揺動させるので、身体の揺動部位の揺動量を好適に大きくすることができ、身体をほぐす効果を高めることができる。
【0119】
なお、実施形態は、以下に示す態様で実現することもできる。
・揺動部位の変化に応じて揺れパターンが変化する構成であればよく、揺動部位と揺れパターンとの対応関係は適宜設定できる。例えば揺動部位が大きいほど、揺動周波数の高い揺れパターンを採用してもよい。例えば第1実施形態において、脚支持部18が高い位置にあるときほど揺動周波数Fを高くしたり、第6実施形態において、エアバッグ42による脚の把持位置が高い位置にあるときほど揺動周波数Fを高くしたりしてもよい。さらに第7実施形態において、エアバッグ51〜53のうち膨張させるものの選択(つまり身体支持部位の選択)により決まる揺動部位の揺動腕長さが短いときほど揺動周波数Fを高くしたり、第8実施形態において、選択された傾動角θ1,θ2(つまり姿勢)から決まる揺動部位の揺動腕長さが短いときほど揺動周波数Fを高くしたりしてもよい。
【0120】
・第1〜第5実施形態におけるオットマン15に設けられた昇降式の脚支持部18に、さらに第6実施形態(図11)における複数のエアバッグ42を設けた構成を採用し、揺動部位の変化と脚支持部18の揺れパターンの変化とを対応付けて制御するようにしてもよい。同様に、第9実施形態(図21)におけるオットマン15に設けられた昇降式の脚支持部18に、さらに第10実施形態(図22)における複数のエアバッグ42を設けた構成を採用し、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数を低くする制御を行ってもよい。なお、第6、第10実施形態及び本変形例等において、脚支持部41(18)の脚方向に沿って配設するエアバッッグの個数(段数)は、3個(上中下3段)あるいは4個以上とすることもできる。
【0121】
・第1〜第6、第9及び第10実施形態において、背押圧部20a、腰押圧部20b及び座押圧部20cのうち選択した一つを膨張させることで身体の揺動支点を変化させる構成を、脚の支持位置を変化させる機能を有するオットマン15と組み合わせて揺動部位変化手段を構成し、揺動部位をより多様に変化させてもよい。また、第7、第8、第11及び第12実施形態において、第1又は第6実施形態のオットマン15を採用してもよい。
【0122】
・前記第7、第8、第11及び第12実施形態において、椅子(椅子型のマッサージ機)の身体支持面側に突出と退避とが可能に設けられた複数の支持部として、エアバッグ51〜53を採用したが、空気等の気体により膨張(突出)・収縮(退避)する気体バッグに限らず、水やオイル等の液体により膨張・収縮する液体バッグなどを含む流体バッグであればよい。さらにシリンダやソレノイド等のアクチュエータの動力で、突出・退避する複数の支持部を採用して揺動部位変化手段を構成してもよい。
【0123】
・揺動部位の変化と揺れパターンの変化は同時であることに限定されず、揺動部位の切り換わりタイミングと、揺れパターンの切り換わりタイミングとが、多少ずれた略同時でもよい。例えば操作部34からの操作信号に基づき揺動部位変化手段の駆動を開始して揺動部位の変化が開始してから少しのタイムラグの後に揺動周波数の変化を開始したり、操作部34からの操作信号に基づきまず揺動周波数の変化を開始してから少しのタイムラグの後に揺動部位変化手段の駆動を開始したりしてもよい。
【0124】
・第2実施形態(図7)及び第3実施形態(図8)では、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺らぎ幅を大きくしたが、これとは逆に、揺動部位が小さいほど(つまり揺動腕長さが短いほど)、揺らぎ幅を大きくしてもよい。
【0125】
・図7、図8に示すような揺動周波数の揺らぎは、正弦波などの曲線状の波形の揺らぎに限定されない。例えば矩形波や三角波の揺らぎでもよい。また、異なる揺動部位に対応する揺れパターンが異なっていれば、例えば一つの揺動実施期間において異なる揺らぎ幅が混在していたり、揺動周波数が一定の期間と揺らぎをもつ期間とが混在していたりしてもよい。
【0126】
・図8において、異なる揺動部位に対応する揺れパターン間で揺らぎ幅と揺らぎ周波数のうち一方が同じである揺れパターンや、揺らぎ幅と揺らぎ周波数が共に同じである揺れパターンを採用してもよい。また、図8において、揺らぎをもつ揺れパターンの揺動部位と、揺らぎのない揺れパターンの揺動部位とが混在してもよい。
【0127】
・図10において、サイクルが異なると、同じ揺動部位でも異なる揺動周波数が設定されてもよい。
・第4実施形態において、揺動周波数を漸進的に変化させる期間は、揺動部位の切り換わり時点で終了するように設定してもよいし、揺動部位の切り換わり時点で開始されるように設定してもよい。また、揺動周波数変化率(傾き)を、切り換わり前後の揺動周波数の差に拘わらず一定にしてもよい。さらに揺動周波数を漸進的に変化させる軌跡は、一定の傾きではなく、曲線状であってもよい。
【0128】
・第2、第3、第5実施形態(図7、図8、図10)において、揺動部位の変化時に、揺れパターンを漸進的に変化させてもよい。
・第5実施形態において、揺動部位の変化に対応して揺れパターンを変化させるサイクルにおいて、揺動周波数に替えて、揺らぎ方(揺らぎ幅と揺らぎ周波数のうち少なくとも一方)のみ、又は揺動周波数と揺らぎ方とを共に、揺動部位の変化に対応して変化させてもよい。
【0129】
・異なる揺動部位間で揺れパターンが全て異なる必要はない。複数の揺動部位のうち揺れパターンが異なるものが少なくとも二つあれば足りる。第1、第3〜第5実施形態(図6、図8〜図10)では、揺動部位が変化すると、揺動実施期間における揺動周波数の平均値が異なるように揺動周波数を変化させたが、複数の揺動部位のうち揺動周波数(少なくとも平均値)が異なるものが少なくとも二つあれば足りる。また、第2、第3実施形態(図7、図8)において、複数の揺動部位のうち揺らぎ幅が異なるものが少なくとも二つあれば足りる。例えば揺動部位を変化させるために操作部34を操作し続けると、異なる揺動部位A,B,Cの順に変化する構成において、揺動部位A,B(少なくとも二つ)の揺れパターンが異なっていれば、揺動部位A,Cが同じ揺動周波数であってもよい。
【0130】
・第1〜第5実施形態において、脚支持部18の昇降位置が連続的に変化するのに伴う揺動部位の連続変化に応じて、揺れパターン(例えば揺動周波数、揺らぎ幅、揺らぎ周波数、あるいはこれらのうち少なくとも二つの組合せ)を連続的に変化させる構成も採用できる。また、第8、第12実施形態において、マッサージ機の姿勢が連続的に変化するのに伴う揺動部位の連続変化に応じて、揺れパターン(例えば揺動周波数、揺らぎ幅、揺らぎ周波数、あるいはこれらのうち少なくとも二つの組合せ)を連続的に変化させる構成も採用できる。
【0131】
・揺動装置はマッサージ機に限定されない。例えばもみ玉等のマッサージ機能を備えない椅子にオットマンを設けた構成でもよい。さらに、例えば仰臥の姿勢で足を載せる足載置台と、足載置台を左右方向に揺動させる揺動駆動手段とを備え、いわゆる金魚運動を行うための揺動装置に適用してもよい。
【0132】
・支持手段の揺動方向は、左右方向以外の方向であってもよい。例えば支持手段を前後方向に揺動させたり、左右方向と前後方向とを含む2種以上の揺動方向の中から使用者が選択できる構成としたり、左右方向と前後方向とを含む2種類以上の揺動方向を組み合わせた揺動方向に揺動させたり、左右方向と前後方向とを含む2種類以上の異なる揺動方向の揺動を合成した方向に揺動させたりしてもよい。
【0133】
・身体の一部を支持する支持手段は、脚を支持するオットマン15(脚支持部18)に限定されない。脚以外の身体の一部を支持する揺動手段を揺動させる揺動装置であってもよい。例えば上腿を支持して揺動させる揺動装置、胴体(腰、脇腹あるいは肩など)を支持して揺動させる揺動装置、腕を支持して揺動させる揺動装置、頭部を支持して揺動させる揺動装置であってもよい。この場合、脚以外の身体の一部を身体支持部により支持してもよいし、エアバッグ等の把持手段により脚以外の身体の一部を把持してもよい。これらの揺動装置であっても、揺動部位(支持手段による支持位置に応じた揺動部位、あるいは揺動部位変化手段により変化する揺動部位)の変化に対応して支持手段の揺れパターンが変化することにより、身体をほぐす効果を高めることができる。
【符号の説明】
【0134】
10…揺動装置としてのマッサージ機、12…座部、13…背もたれ部、15…オットマン、18…支持手段及び脚支持手段としての脚支持部、19…揺動駆動手段としての揺動駆動部、20a…背押圧部、20b…腰押圧部、20c…座押圧部、23…揺動部位変化手段としての揺動部位変化機構、25…モータ、29…アクチュエータ、30…メイン制御部、31…第1制御部、32…揺動周波数制御部、33…揺動部位変化機構、34…操作部、36…センサ、40…揺動部位変化機構、41…支持手段を構成する脚支持部、42,42a,42b…支持手段を構成するエアバッグ、51〜53…支持手段を構成するとともに支持部としてのエアバッグ、55…揺動部位変化手段としての支持位置変化機構、65…揺動部位変化手段としての姿勢調整機構、67…センサ、71…第1角度調整機構、76…第2角度調整機構、A,B,C…揺動部位、F,F1〜F3…揺動周波数、Δf,Δf1〜Δf3…揺らぎ幅、θ1,θ2…傾動角、P…揺動支点、K…脚、S…身体。
【技術分野】
【0001】
本発明は、身体の一部を支持する支持手段を揺動させる機能を備えた揺動装置に関する。
【背景技術】
【0002】
従来、使用者が着座した状態でマッサージを受けられる椅子型のマッサージ機が知られている。こうした椅子型のマッサージ機には、使用者の脚部を載置可能な脚載台(オットマン)が装備されたものがある。例えば特許文献1及び特許文献2には、脚載台(オットマン)を左右に揺動させる揺動機構を備えた椅子型のマッサージ機が開示されている。使用者の脚部を支持している脚載台が左右方向に往復移動することに伴って、使用者の両脚を含む下半身全体が腰部を中心として揺動運動をし、この揺動運動により使用者の脚部の緊張状態を緩和するマッサージ効果が得られる。
【0003】
また、特許文献2に開示されているマッサージ機では、揺動機構を備えた脚載部が脚の長さ方向にスライドして位置調整できる技術や、座部の隆起を調節して臀部の支持状態を変化させて、身体の揺動支点を変化させることにより、身体の揺動部位を変化させる技術が開示されている。また、脚を上下方向に揺動させる揺動部を備えたマッサージ機(例えば特許文献3)や、腰部を揺動させる揺動部を備えたマッサージ機(例えば特許文献4)なども知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−328262号公報
【特許文献2】特開2008−237295号公報
【特許文献3】特開平11−113998号公報
【特許文献4】特開2007−167434号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2では、脚載部が脚の長手方向に移動することにより脚に対する支持位置を変えたり、あるいは座部の隆起を調節して臀部の支持状態を変化させることにより姿勢を変えたりすることにより、使用者の身体の揺動する部位や領域(以下、「揺動部位」という)を変化させることができるが、揺動部位の変化だけでは、揺動によるマッサージが単調であり、身体をほぐす効果も十分ではないという問題があった。
【0006】
本発明は、上記課題を解決するためになされたものであって、その目的は、身体をより効果的にほぐすことができる揺動装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明は、使用者の身体を揺動させる揺動機能を備えた揺動装置において、身体の一部を支持する支持手段と、前記支持手段を揺動させる揺動駆動手段と、前記支持手段が揺動するときの身体の揺動部位を変化させる揺動部位変化手段と、前記揺動部位の変化と前記支持手段の揺動による揺れパターンの変化とを対応付けて前記揺動駆動手段を制御する制御手段と、を備えたことを要旨とする。
【0008】
本発明の揺動装置において、前記制御手段は、前記揺動部位が異なれば、揺動周波数の異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することが好ましい。
【0009】
本発明の揺動装置において、前記制御手段は、前記揺動部位が異なれば、前記揺動部位に対応する揺れパターンで揺動を実施する揺動実施期間における揺動周波数の平均値が異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することが好ましい。
【0010】
本発明の揺動装置において、前記揺動実施期間における揺動周波数の平均値が異なる制御は、前記揺動部位が大きい方が、前記揺動周波数の平均値を低くする制御であることが好ましい。
【0011】
本発明の揺動装置において、前記揺動部位の変化と揺れパターンの変化が対応付けられた制御は、前記揺動部位が異なれば、揺動周波数のゆらぎ幅を異ならせる制御であることが好ましい。
【0012】
本発明の揺動装置において、前記揺動部位変化手段が揺動部位を変化させるのと略同時に、前記制御手段は揺れパターンを変化させることが好ましい。
本発明の揺動装置において、前記揺動部位変化手段が揺動部位を変化させたとき、前記制御手段は前記揺動部位の変化に対応する揺れパターンへ漸進的に変化させることが好ましい。
【0013】
本発明の揺動装置において、前記揺動部位変化手段が揺動部位を変化させたときに、前記制御手段は揺れパターンを変化させる場合と変化させない場合の両方を含んだ制御を行うことが好ましい。
【0014】
本発明の揺動装置において、前記揺動部位変化手段は、前記支持手段が支持する身体の支持位置を変化させることが好ましい。
本発明の揺動装置において、前記揺動部位変化手段は、前記支持手段が把持する身体の把持位置を変化させることが好ましい。
【0015】
本発明の揺動装置において、前記揺動部位変化手段は、前記支持手段に支持される支持位置以外の身体部位を支持し、当該身体部位の支持位置を変化させることが好ましい。
本発明の揺動装置において、座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記椅子に突出と退避とが可能に設けられた複数の支持部を有し、前記複数の支持部のうち突出させるものを選択することにより、身体の支持位置を変化させることが好ましい。
【0016】
本発明の揺動装置において、前記揺動部位変化手段は、身体の姿勢を変化させることが好ましい。
本発明の揺動装置において、座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記座部に対する少なくとも前記背もたれ部の傾動角を変化させることが好ましい。
【0017】
本発明の揺動装置において、前記支持手段は、使用者の脚の一部を支持する脚支持手段であり、前記揺動駆動手段は、前記脚支持手段を揺動させることが好ましい。
【発明の効果】
【0018】
本発明によれば、より効果的に身体をほぐすことが可能な揺動装置を提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明を具体化した第1実施形態における椅子型のマッサージ機の斜視図。
【図2】座部及びオットマンを正面から見た模式図。
【図3】図2のA−A線矢視図。
【図4】(a)〜(c)は脚支持部の昇降位置を示す模式正面図、(d)は脚支持部の昇降機構を示す模式側面図。
【図5】マッサージ機の揺動制御に係る電気的構成を示すブロック図。
【図6】揺動部位と揺動周波数との対応関係を示すグラフ。
【図7】第2実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図8】第3実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図9】第4実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図10】第5実施形態における揺動部位と揺動周波数との対応関係を示すグラフ。
【図11】(a),(b)第6実施形態において脚の把持位置を変化させるエアバッグ式の揺動部位変化機構を示す模式正面図。
【図12】第7実施形態において身体の支持位置を変化させるエアバッグ式の支持位置変化機構を示す模式図。
【図13】マッサージ機の揺動制御に係る電気的構成を示すブロック図。
【図14】(a)〜(c)エアバッグの膨張による身体支持位置を示す斜視図。
【図15】(a)〜(c)身体支持位置の違いに応じた揺動部位を説明する側面図。
【図16】第8実施形態において身体の支持位置を変化させるエアバッグ式の支持位置変化機構を示す斜視図。
【図17】リクライニング機構付きの椅子型マッサージ機を示す側面図。
【図18】マッサージ機の揺動制御に係る電気的構成を示すブロック図。
【図19】(a)〜(c)椅子の姿勢を示す斜視図。
【図20】(a)〜(c)椅子の姿勢の違いに応じた揺動部位を説明する側面図。
【図21】(a)〜(c)第9実施形態における脚支持部の昇降位置と揺動周波数との対応関係を示す模式正面図。
【図22】(a),(b)第10実施形態におけるエアバッグによる脚把持位置と揺動周波数との対応関係を示す模式正面図。
【図23】(a)〜(c)第11実施形態におけるエアバッグによる身体支持位置と揺動周波数との対応関係を示す斜視図。
【図24】(a)〜(c)第12実施形態における椅子の姿勢と揺動周波数との対応関係を示す斜視図。
【発明を実施するための形態】
【0020】
(第1実施形態)
以下、本発明を椅子型のマッサージ機に具体化した第1実施形態を図1〜図6に従って説明する。
【0021】
図1に示すように、揺動装置としての椅子型のマッサージ機10は、図示しない床面に載置される脚部11を備え、その脚部11の上方には使用者が着座可能な座部12が固定されている。この座部12の後側には、使用者が背中をもたせ掛けさせるための背もたれ部13が傾動可能に設けられている。また、座部12の前側には、使用者の脚を載せることができるオットマン15(脚載台)が同じく傾動可能に設けられている。また、座部12の左右両側には、使用者の腕を置くための肘掛け部16が背もたれ部13から座部12の両側前方にかけて設けられている。オットマン15には、使用者の脚を挿入可能な凹状をなす脚支持部18が左右に計2つ配置されている。そして、各脚支持部18は左右方向に揺動可能となっている。また、背もたれ部13及び座部12には、使用者の身体の一部を押圧可能なエアバッグよりなる、背押圧部20a、腰押圧部20b及び座押圧部20cが各々設けられている。さらに、背もたれ部13には身体のマッサージを行うためのもみ玉などの施療子(図示せず)が内装されている。なお、本実施形態では、脚支持部18が、支持手段及び脚支持手段に相当する。
【0022】
図2に示すように、左右1組の脚支持部18は、左右方向に揺動可能な連結ベース部24に対して左右方向に一体で揺動可能、かつ脚Kの長手方向に移動可能(昇降可能)な状態で取り付けられている。脚支持部18を昇降させることにより、使用者の脚Kの足首から膝下までの範囲内の任意の部位を支持可能となっている。ここで、オットマン15において脚支持部18の上昇とは膝側への移動を指し、その下降とは足先側への移動を指すものとする。オットマン15には、脚支持部18が左右方向に揺動するときの身体の揺動部位を、脚支持部18を脚の長手方向に移動させることにより変化させる揺動部位変化手段としての揺動部位変化機構23が設けられている。
【0023】
図3に示すように、左右の脚支持部18が前面(図3における下側)に取り付けられた連結ベース部24は、その背面側(図3では上側)に配置された揺動駆動手段としての揺動駆動部19が駆動されることにより、左右方向の揺動運動を行う。揺動駆動部19は、動力源となるモータ25と、このモータ25の回転駆動力を左右方向への往復直線運動に変換する直動変換機構26とを有している。
【0024】
直動変換機構26は、オットマン15の固定フレーム(図示せず)に、左右方向に沿って延びるように架設されたガイドレール27と、このガイドレール27に沿って摺動自在に支持される一対の可動部24aを有する連結ベース部24とを備える。さらに、直動変換機構26は、モータ25の回転軸(図示略)に同軸回転可能に連結された回転部材25aと、回転部材25aと一方(図3では右側)の可動部24aとの間に介装されたリンク部材28とを有している。リンク部材28はその基端部が回転部材25aの周縁部に対して回動自在に連結され、その先端部が一方(図3では右側)の可動部24aに対して回動自在に連結されている。
【0025】
このため、モータ25が駆動されて回転部材25aが回転し、リンク部材28の基端部が回転運動をすることにより、その先端部と連結された一方の可動部24aに力が伝達されてその可動部24aがガイドレール27に沿って左右方向に往復摺動することによって、連結ベース部24はガイドレール27に沿って左右方向に往復移動する。このようにガイドレール27に沿って連結ベース部24が左右方向に往復移動することで、オットマン15の脚支持部18が一体的に揺動する。
【0026】
図4(d)に示すように、オットマン15には、脚支持部18を昇降させて脚支持部18により支持される脚Kにおける支持位置(支持部位)を変化させることにより、脚Kのうち揺動することになる揺動部位を変化させる揺動部位変化機構23が設けられている。揺動部位変化機構23は、脚支持部18と、直動型のアクチュエータ29とを備える。直動型のアクチュエータ29は連結ベース部24の背面に組み付けられ、その駆動軸29aの先端部に脚支持部18が固定されている。図2及び図3に示す連結ベース部24には、縦方向(脚長手方向)に沿って延びるスリット(図示せず)が形成され、脚支持部18はスリットを介して連結ベース部24の裏面側の駆動軸29a(図4(d)参照)と連結されている。図4(d)に示すアクチュエータ29は、例えば直動型の電動アクチュエータであり、その駆動軸29aが軸方向に移動(又は伸縮)することにより、脚支持部18は、図4(a)〜(c)に示すように昇降方向(図4では上下方向)にスライドする。
【0027】
そして、脚支持部18は、図4(a)に示す下降位置と、図4(b)に示す中間位置と、図4(c)に示す上昇位置とをそれぞれ中心高さとする下降範囲・中間範囲・上昇範囲のうちのいずれかの範囲に属するように昇降するようになっている。脚支持部18が図4(a)に示す下降位置にある状態で左右方向(同図における矢印方向)に揺動するときは、脚Kの先端側に揺れの力が付与され、下腿下部と足が揺動部位となる。また、脚支持部18が図4(b)に示す中間位置にある状態で左右方向に揺動するときは、脚Kのうち下腿の中間部位に揺れの力が付与され、下腿全体と足が揺動部位となる。さらに、脚支持部18が図4(c)に示す上昇位置にある状態で左右方向に揺動するときは、脚Kの膝下部に揺れの力が付与され、脚全体が揺動部位となる。
【0028】
次に、マッサージ機10における揺動制御に係る電気的構成を説明する。図5に示すように、マッサージ機10には、オットマン15の揺動制御を含む各種の制御を司るメイン制御部30が設けられている。メイン制御部30には、揺動部位変化機構23を駆動制御する第1制御部31と、揺動駆動部19を駆動させて脚支持部18を揺動させるとともにその揺動周波数を制御する揺動周波数制御部32とが電気的に接続されている。メイン制御部30には、マッサージ機10の運転の開始/停止や、リクライニング動作、エアバッグの膨縮、オットマン15の揺動運動、脚支持部18の昇降などを行う際に使用者が操作するリモートコントロール式の操作部34が接続されている。使用者が操作部34を操作して脚支持部18の上昇/下降を指示すると、第1制御部31はメイン制御部30からの指示に従ってアクチュエータ29を駆動制御して、使用者が操作部34で指示する方向へ脚支持部18を移動させる。なお、メイン制御部30は、マッサージ機10の背もたれ部13に内装されたもみ玉などの施療子の駆動制御も行う。
【0029】
第1制御部31は、脚支持部18の昇降方向の位置を変化させることにより、身体の揺動部位を変化させる。詳しくは、使用者がマッサージ機10に着座した状態で、両脚Kを挿入した各脚支持部18が左右方向に揺動するときには、脚支持部18の昇降位置に応じて決まる揺動支点から足先までの部位が、揺動部位(揺動領域)となる。
【0030】
揺動部位変化機構23には、脚支持部18による脚Kの支持位置を検出するセンサ35が設けられている。センサ35としては、脚支持部18の昇降位置を検出する例えば位置センサが用いられる。第1制御部31はセンサ35から入力する検出結果に基づき脚支持部18の昇降位置を取得する。
【0031】
揺動周波数制御部32は、脚支持部18の昇降位置(つまり脚Kの支持位置)と揺動周波数との対応関係、すなわち脚Kの揺動部位と揺動周波数との対応関係を示す参照データをメモリに記憶している。揺動周波数制御部32は、揺動駆動部19の駆動開始時及び駆動中に、第1制御部31からメイン制御部30を介して脚支持部18の昇降位置情報を逐次取得し、メモリに記憶された前述の参照データを参照することにより、その取得した脚支持部18の昇降位置に対応する揺動周波数を取得する。そして、揺動周波数制御部32は、その取得した揺動周波数で脚支持部18を揺動させうる回転速度でモータ25を制御する。なお、参照データには、詳細には、脚支持部18の昇降位置に対応するモータ25の回転速度、あるいはこの回転速度を決める電圧値(例えばデューティ値)などのデータが記憶され、脚支持部18の昇降位置を基に参照データを参照して取得した回転速度又は電圧値に基づきモータ25の回転速度を制御する構成としてもよい。
【0032】
また、揺動駆動部19には、モータ25の回転を直接又は間接的に検出可能なロータリエンコーダ等からなるセンサ36が設けられている。揺動周波数制御部32は、センサ36から入力した検出信号に基づきモータ25の回転速度を取得し、その回転速度に基づき脚支持部18が左右方向に揺動しているときの実際の揺動周波数Fを取得する。そして、揺動周波数制御部32は、メイン制御部30から指令された揺動周波数に、実際の揺動周波数を近づけるようにフィードバック制御を行う。もちろん、揺動周波数Fのフィードフォワード制御を採用してもよい。
【0033】
本実施形態の参照データには、脚支持部18の昇降位置毎に、異なる揺動周波数が設定されている。例えば図6に示すように、脚支持部18の昇降位置に応じて決まる揺動部位A,B,C毎に、異なる揺動周波数F2,F3,F1(但しF1<F2<F3)がそれぞれ設定されている。なお、図6は一例であって、揺動部位A,B,Cに応じた揺動周波数は、複数の揺動部位毎に異なっていればよい。揺動部位と揺動周波数の組合せも3組に限定されず、3組以外の複数組であってもよい。さらに、揺動部位の切り換わり順も、使用者の操作あるいはモードに応じて適宜変更可能である。また、図6では、揺動部位A,B,Cになっている期間(図6における各揺動部位の時間軸方向の幅に相当)が、各揺動部位に対応する揺動実施期間となっている。
【0034】
次に本実施形態のマッサージ機10の作用を説明する。使用者はマッサージ機10に着座した状態で、操作部34を操作してマッサージ機10の背もたれ部13を所望のリクライニング角に調整するとともに、オットマン15を所望の角度に調整する。そして、オットマン15で脚を揺動させたいときには、まず操作部34を操作して脚支持部18の昇降位置を調整する。脚支持部18を所望の昇降位置に調整したら、操作部34を操作して脚支持部18の揺動を開始させる。なお、脚支持部18の揺動を開始させる操作方法には、複数用意されたマッサージコースの中から、脚Kの揺動運動を含むコースを選択する方法と、脚Kの揺動運動をそれ単独で選択する方法とがある。
【0035】
使用者は、例えば脚支持部18の昇降位置を、図4(a)〜(c)のいずれかの位置範囲に調整することにより、所望の揺動部位を選択する。マッサージ機10の運転開始に際して、メイン制御部30は、まず第1制御部31を介して脚支持部18の昇降位置情報を取得し、その昇降位置情報(つまり脚支持位置情報)を基に参照データを参照して、その昇降位置に対応する揺動周波数Fを取得する。そして、メイン制御部30は、その取得した揺動周波数Fを指定して揺動周波数制御部32に対して揺動駆動部19の駆動を指示する。揺動周波数制御部32は、その指示された揺動周波数Fが得られる回転速度でモータ25を駆動させ、脚支持部18をその指示された揺動周波数Fで揺動させる。
【0036】
オットマン15の揺動動作中において、使用者による操作部34の操作により、あるいはマッサージコース中の設定により、例えば図6に示すように揺動部位がA,B,Cの順番に切り換わったとする。図6の例では、運転開始初期に揺動周波数F0で準備運転し、その後、揺動部位がA,B,Cの順番に切り換わると、オットマン15は、以下のように運転される。
【0037】
揺動部位Aにあるときの揺動実施期間では脚支持部18が揺動周波数F2で運転され、揺動部位Aから揺動部位Bへ切り換わると、揺動周波数F2から揺動周波数F3に変化する。そして、揺動部位Bにあるときの揺動実施期間では脚支持部18が揺動周波数F3で運転される。さらに、揺動部位Bから揺動部位Cへ切り換わると、揺動周波数F3から揺動周波数F1に変化する。そして、揺動部位Cにあるときの揺動実施期間では脚支持部18が揺動周波数F1で運転される。このように揺動部位A〜Cの変化に応じて揺動周波数も変化するので、脚Kの揺動運動が単調ではなくなり、揺動部位が変化しても揺動周波数が変化しない構成に比べ、より高いマッサージ効果が得られる。
【0038】
以上詳述したように本実施形態によれば、以下の効果が得られる。
(1)オットマン15に左右方向に揺動可能に設けられた脚支持部18に対して脚Kの長手方向に沿って移動する脚支持部18の昇降位置に応じて揺れパターンを変化させる。つまり、脚Kの揺動部位の変化に応じて揺れパターンを変化させる構成とした。このため、各揺動部位に適した気持ち良さ、及びほぐし効果を得ることができる。よって、揺動部位が変化しても揺れパターンが変化しない構成に比べ、より高いマッサージ効果を得ることができる。また、揺動部位の変化に応じて揺れパターンが変化するので、使用者は多様な動作感を得ることができる。
【0039】
(2)オットマン15に設けられた脚支持部18の昇降位置に応じて揺動周波数を変化させる。つまり、脚Kの揺動部位の変化に応じて揺動周波数を変化させる構成とした。このため、揺動部位が変化しても揺動周波数が変化しない構成に比べ、より高いマッサージ効果を得ることができる。
【0040】
(3)揺動部位毎の揺動周波数が一定である揺れパターンを採用した。このため、同じ揺動部位にあるときには一定の揺動周波数に保たれるため、一定のリズムで脚Kを揺動させることができ、高いマッサージ効果を得ることができる。
【0041】
(4)揺動部位変化機構23が揺動部位を変化させるのと略同時に、制御手段(メイン制御部30及び揺動周波数制御部32)が揺動周波数を変化させ、異なる揺動部位に適した異なる揺動周波数に制御するので、各揺動部位に適した気持ち良さ、及びほぐし効果が得られるうえ、揺動部位の変化時点が実感しやすくなり、動作感が向上する。
【0042】
(5)脚支持部18を移動可能に設け、脚の支持位置を変化させることにより、揺動部位を変化させる構成なので、揺動部位変化機構23を比較的簡単に構成できる。
(第2実施形態)
次に第2実施形態を図7に従って説明する。第2実施形態では、オットマン15の揺動周波数は揺動部位が異なっても同じにしつつ揺動部位に応じた異なる揺らぎを与える点が、第1実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0043】
図7に示すように、脚支持部18の昇降位置に応じた揺動部位A,B,C毎の揺れパターンは、揺動周波数の平均値は同じであるが、揺動周波数の揺らぎ方が異なる。図7の例では、揺動部位A,B,C毎の揺動実施期間における揺れパターンは、揺動周波数の平均値は各揺動部位間で同じ一定値Favgとなっている。そして、揺動部位Aに対応する揺れパターンの揺らぎ幅Δf2と、揺動部位Bに対応する揺れパターンの揺らぎ幅Δf1と、揺動部位Cに対応する揺れパターンの揺らぎ幅Δf3は、Δf1<Δf2<Δf3の大小関係にあり、揺動部位毎に異なっている。揺らぎ幅Δf1〜Δf3は、実験的に得られた各揺動部位A,B,C毎に好ましい値に設定されている。なお、揺らぎ周波数は、揺動部位A〜Cで同じであるが、揺らぎ周波数を揺動部位毎に異ならせてもよい。
【0044】
メイン制御部30は、メモリに、揺動部位と、揺らぎ周波数及び揺らぎ幅との対応関係を示す参照データと、平均揺動周波数Favgのデータとを記憶している。メイン制御部30は、脚支持部18の昇降位置から把握される揺動部位に対応する揺らぎ周波数と揺らぎ幅を、参照データを参照して取得する。そして、メイン制御部30は、平均揺動周波数Favgと、揺らぎ周波数及び揺らぎ幅Δfを指定して、揺動周波数制御部32に対して揺動制御を指示する。揺動周波数制御部32は、指示された内容に従って、揺動部位A,B,C毎に、揺動周波数の揺らぎ方が異なるように揺動駆動部19を制御する。なお、参照データは、揺動部位と、揺らぎ1周期分の揺動周波数との対応関係を示すものとし、メイン制御部30は揺動周波数を指定して揺動周波数制御部32に揺動制御を指示する構成も採用できる。また、メイン制御部30が、参照データから取得した揺らぎ周波数及び揺らぎ幅と平均揺動周波数Favgとを基に演算した揺動周波数を指定して揺動周波数制御部32に揺動制御を指示する構成としてもよい。
【0045】
(6)第2実施形態によれば、揺動部位の変化と揺れパターンの変化とが対応付けられた制御として、揺動部位が異なれば、揺動実施期間における揺動周波数の揺らぎ方を異ならせる制御を行う。よって、揺動部位A,B,C毎に、実験的に得られた好ましい揺らぎを与えることにより、揺動部位毎に好ましい揺らぎを与え、使用者は揺動よるほぐし効果と、揺らぎによる気持ちよさを得ることができる。また、揺動部位が変化すると揺らぎ方が変化するので、多様な動作感が得られるうえ、揺動部位の変化を実感しやすくなる。
【0046】
(第3実施形態)
次に第3実施形態を図8に従って説明する。第3実施形態では、揺動部位が変化すると、揺動周波数と揺らぎを共に変化させる点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0047】
図8に示すように、揺動部位A,B,C毎の揺動実施期間における揺動周波数の平均値が揺動部位間で異なるうえ、揺動周波数の揺らぎ方も揺動部位間で異なるように制御する。図8の例では、揺動部位A,B,C毎の揺動実施期間における揺れパターンは、揺動周波数の平均値はそれぞれF2,F3,F1であり、揺動周波数の揺らぎ幅はそれぞれΔf2,Δf1,Δf3である(Δf1<Δf2<Δf3)。揺らぎ幅Δf1〜Δf3は、実験的に得られた各揺動部位A,B,C毎に好ましい値に設定されている。また、揺らぎ周波数は、揺動部位A,Cで同じで、揺動部位Bが揺動部位A,Cの揺らぎ周波数より高くなっている。もちろん、揺らぎ周波数を揺動部位毎に異ならせてもよい。
【0048】
メイン制御部30は、メモリに、揺動部位と、揺動周波数の平均値、揺らぎ周波数及び揺らぎ幅との対応関係を示す参照データを記憶している。メイン制御部30は、脚支持部18の昇降位置から把握される揺動部位に対応する揺動周波数の平均値と揺らぎ周波数と揺らぎ幅を、参照データを参照して取得する。そして、メイン制御部30は、揺動周波数の平均値と、揺らぎ周波数及び揺らぎ幅Δfを指定して、揺動周波数制御部32に対して揺動制御を指示する。揺動周波数制御部32は、指示された内容に従って、揺動部位A,B,C毎に、揺動周波数の平均値及び揺らぎ方が異なるように揺動駆動部19を制御する。なお、メイン制御部30及び揺動周波数制御部32による揺動制御方法としては、第2実施形態で述べた他の方法も採用できる。
【0049】
(7)第3実施形態によれば、揺動部位の変化と揺れパターンの変化とが対応付けられた制御として、揺動部位が異なれば、揺動実施期間における揺動周波数(平均値)と揺らぎ方とが共に異なる制御を行う。よって、揺動周波数のみ変化させる第1実施形態や、揺らぎ方のみ変化させる第2実施形態に比べ、各揺動部位に適したより高いほぐし効果、及び気持ち良さを得ることができる。さらに、揺動部位の変化を一層実感しやすくなり、使用者がさらなる多様な動作感を得ることができる。
【0050】
(第4実施形態)
次に第4実施形態を図9に従って説明する。第4実施形態では、揺動部位の切り換わり時に揺動周波数を滑らかに変化させる点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0051】
図9に示すように、揺動部位A,B,Cが切り換わるときには、前の揺動周波数から次の揺動周波数へ漸進的に変化する。図9の例では、揺動部位A,B,Cが切り換わるときには、その揺動部位の切り換わり時点(図9における縦の破線)よりも少し前のタイミングから、揺動周波数を一定の変化率で変化させ始め、揺動部位の切り換わり時点の少し後のタイミングで、その揺動部位に対応する揺動周波数に達するようにする。すなわち、揺動部位の切り換わりと略同時に揺動周波数が変化するが、このとき、前の揺動部位に対応する揺動周波数から次の揺動部位に対応する揺動周波数まで、揺動周波数が一定の傾き(揺動周波数変化率)で変化する。
【0052】
メイン制御部30は、メモリに、揺動部位と揺動周波数との対応関係を示す参照データを記憶するとともに、この参照データから取得した切り換わり前後の揺動部位に対応する各揺動周波数の差に応じた揺動周波数変化率を算出する。揺動周波数変化率は、単位時間当たりの揺動周波数の変化量(増加量又は減少量)を示し、揺動周波数を高くするときには正の値をとり、揺動周波数を低くするときには負の値をとる。
【0053】
メイン制御部30は、操作部34から脚支持部18の上昇又は下降を指示する操作信号を入力すると、現在の揺動部位に対応する揺動周波数と次の揺動部位に対応する揺動周波数との差を求め、その差を予め定められた変化実施時間で割って揺動周波数変化率を算出する。そして、メイン制御部30は、脚支持部18が上昇又は下降して次の揺動部位に切り換わる手前のタイミング(例えば変化実施期間の半分の時間だけ手前)から、揺動周波数を、先に算出した揺動周波数変化率で変化させる。この揺動周波数制御は、メイン制御部30が揺動周波数制御部32に対してその時々の揺動周波数を指示することにより行われる。この結果、図9に示すように、揺動部位の切り換わり時点より少し前のタイミングから揺動周波数が変化し始め、揺動部位の切り換わり時点に少し遅れて次の揺動周波数に到達し、揺動周波数が滑らかに変化する。
【0054】
(8)第4実施形態によれば、揺動部位A,B,Cの切り換わり時に揺動周波数が漸進的に変化するので、第1実施形態(図6)のように揺動周波数が急に変化する構成に比べ、揺動周波数の変化による身体への負担を軽減することができる。
【0055】
(第5実施形態)
次に第5実施形態を図10に従って説明する。第5実施形態では、揺動部位が変化すると揺動周波数を変化させる期間と、揺動部位が変化しても揺動周波数を変化させない期間とが混在する揺動制御が行われる点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0056】
図10は、マッサージ機10に設定された1つのマッサージモードの時間と揺動周波数との関係を示す。このマッサージモードは、複数の期間(サイクル)に分かれ、1つのサイクルで揺動部位がA,B,Cの順番に変化する。1サイクル目では、揺動部位がA,B,Cと変化しても揺動周波数は変化することなく一定値に保持され、2サイクル目では、揺動部位がA,B,Cと変化すると、揺動部位毎に異なる揺動周波数に変化する。
【0057】
メイン制御部30のメモリには、このマッサージモード中のサイクル毎に、どの揺動部位も同じ一定の揺動周波数とする第1サイクルであるか、揺動部位毎に揺動周波数を変化させる第2サイクルであるかを判別するためのフラグが書き込まれた設定データが記憶されている。また、メイン制御部30のメモリには、第2サイクル用に、揺動部位と揺動周波数との対応関係を示す参照データが記憶されている。
【0058】
メイン制御部30は、マッサージ機10が上記マッサージモードで運転されているとき、設定データを参照して、現在のnサイクル目(但しnは1,2,…,k)が第1サイクルであるか第2サイクルであるかを判断する。例えば図10に示す1サイクル目であれば、設定データのフラグから第1サイクルであると判断され、メイン制御部30は、揺動部位が変化しても一定の揺動周波数F2に保持する。一方、図10に示す2サイクル目であれば、設定データのフラグから第2サイクルであると判断される。よって、メイン制御部30は、揺動部位が変化すると、参照データを参照してその変化後の揺動部位に対応する揺動周波数を取得し、オットマン15をその揺動周波数に変化させる。こうして図10に示すように、2サイクル目では揺動部位の変化に応じて揺動周波数が変化する。3サイクル目以降も同様の揺動制御が行われる。なお、揺動制御は、揺動周波数制御部32が、メイン制御部30から指定された揺動周波数に揺動駆動部19を制御することにより行われる。
【0059】
(9)第5実施形態によれば、マッサージモード中に揺動部位の変化に応じて揺動周波数を変化させるサイクル(期間)と、揺動周波数を変化させないサイクル(期間)とがあるので、揺動周波数の変化による効果をより実感できるとともに、揺動周波数の変化に対する身体への負担も少なくなる。また、揺動のバリエーションが増え、より高いマッサージ効果が得られる。
【0060】
(第6実施形態)
次に第6実施形態を図11に従って説明する。第6実施形態では、揺動部位変化機構を複数のエアバッグを使用しその膨縮により脚の支持位置(把持位置)を変化させる機構とした点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0061】
図11(a)に示すように、揺動部位変化手段としての揺動部位変化機構40は、前記第1実施形態と同様の揺動駆動部19により左右方向に揺動可能な左右1組の脚支持部41(同図では一方のみ図示)を備える。但し、脚支持部41は、連結ベース部24(図3参照)に固定されており、第1実施形態の脚支持部18よりも脚Kの長手方向の長さが長く形成されている。脚支持部41の内側には、脚を左右両側から把持するための複数のエアバッグ42が、脚Kの長手方向(図11の上下方向)に沿って複数組(図11では2組)配置されている。各エアバッグ42は、切換弁43a,43bを介してエアポンプ44の吐出口に接続されている。揺動周波数制御部32(図5参照)は、エアポンプ44の駆動状態で切換弁43a,43bを切り換えることにより、複数組のエアバッグ42のうち膨張させる1組を選択する。詳しくは、切換弁43aは、下段のエアバッグ42aに対して給気を行う給気位置と排気を行う排気位置とに切り換えられる。また、切換弁43bは、上段のエアバッグ42bに対して給気を行う給気位置と排気を行う排気位置とに切り換えられる。
【0062】
第1制御部31は、揺動部位変化機構40のエアポンプ44を駆動制御するとともに、切換弁43a,43bの切換え制御を行う。操作部34により脚Kの把持位置を下降させる操作がなされると、第1制御部31は、エアポンプ44を駆動するとともに、切換弁43aを給気位置に、切換弁43bを排気位置にそれぞれ切り換える。この結果、図11(a)に示すように、下段のエアバッグ42aが膨張するとともに上段のエアバッグ42bが収縮し、下段のエアバッグ42aにより下腿の下部が把持される。一方、操作部34により脚Kの把持位置を上昇させる操作がなされると、第1制御部31は、エアポンプ44を駆動するとともに、切換弁43aを排気位置に、切換弁43bを給気位置にそれぞれ切り換える。この結果、図11(b)に示すように、下段のエアバッグ42aが収縮するとともに上段のエアバッグ42bが膨張し、上段のエアバッグ42bにより下腿の上部が把持される。
【0063】
本実施形態のマッサージ機10における揺動制御に係る電気的構成は、図5と基本的に同様であるが、図5における揺動部位変化機構23に替えてエアバッグ式の揺動部位変化機構40になっている他、脚Kの支持位置を検出するセンサ35を備えていない。第1制御部31は、脚Kの把持位置を指定して複数組のエアバッグ42a,42bの膨張と収縮の制御信号を揺動部位変化機構40に出力することにより、エアバッグ42による把持制御を行う。このため、第1制御部31は、制御信号を出力した時点でエアバッグ42による把持位置を把握している。詳しくは、第1制御部31は、下段を把持位置に指定してエアバッグ42の膨張と収縮の制御信号を出力したときには、下段のエアバッグ42aが把持位置であることを把握しており、上段を把持位置に指定してエアバッグ42の膨張と収縮の制御信号を出力したときには、上段のエアバッグ42bが把持位置であることを把握している。
【0064】
メイン制御部30は、エアバッグ42の把持位置に対応する揺動部位を基に参照データを参照して揺動制御に必要な揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、把持位置(揺動位置)に対応する揺動部位の変化に応じて揺動周波数を変化させる。なお、メイン制御部30及び揺動周波数制御部32は、参照データから取得される揺動部位に対応する揺動周波数制御情報に基づき、図6〜図10のいずれかのグラフで示される揺動部位に対応する揺れパターンで揺動制御を行う。
【0065】
(10)第6実施形態によれば、脚支持部41に設けた複数組のエアバッグ42を膨縮制御し、脚の把持位置を変化させる構成としたので、簡便な構成で揺動部位変化機構23が実現できる。また、エアバッグ42の膨縮により脚Kの把持位置(つまり揺動位置)を変化させるので、第1実施形態における脚支持部18に比べ、脚Kの揺動位置をしっかり保持できる。また、エアバッグ式の揺動部位変化機構23であるため、脚の着衣が脚支持部18の昇降に伴ってずれる事態も回避できる。さらに、図6〜図10に示す揺れパターンの採用によって、脚の揺動運動を行うときに、前記第1〜第5実施形態と同様の効果を得ることができる。
【0066】
(第7実施形態)
次に第7実施形態を図12〜図15に従って説明する。第7実施形態では、身体の揺動支点を変化させて揺動部位を変化させる構成である点が、前記各実施形態と異なる。なお、第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0067】
図12に示すように、マッサージ機10は、第1実施形態と同様に、座部12、背もたれ部13及びオットマン15を備える。オットマン15には、第1実施形態と同様の揺動駆動部19(図3、図13参照)の駆動により、左右方向に揺動可能な脚支持部18が設けられている。図12では、脚支持部18を、説明の便宜上、板状に描いているが、実際は第1実施形態と同様に平面視で断面U字状の形状を有している。但し、脚支持部18は、昇降式でも固定式でもよい。また、脚支持部18は、第6実施形態のエアバッグ42を備えた脚支持部41とすることもできる。
【0068】
本実施形態のマッサージ機10では、脚支持部18にエアバッグ51が設けられ、座部12にエアバッグ52が設けられ、さらに背もたれ部13にエアバッグ53が設けられている。各エアバッグ51〜53は図12における矢印で示す方向へ個別に膨張可能である。エアバッグ51〜53のうち膨張した一つが身体の対応する箇所、すなわち下腿、臀部、背中のうち一つを裏側(背面側)から押し上げる。その押し上げられた箇所で身体が支持され、膨張させるエアバッグの選択により身体の支持位置を変化させることにより、オットマン15が揺動したときの身体の揺動支点が変化する。各エアバッグ51〜53は、身体の支持位置を変化させる支持位置変化機構55の一部を構成している。また、本実施形態の脚支持部18の先端側には、足を載置可能な足載置部18bが脚支持部18に対して角度変更可能な状態で連結されている。なお、図12では、椅子の脚部11は省略している。また、本実施形態では、支持位置変化機構55が揺動部位変化手段に相当し、エアバッグ51〜53が複数の支持部に相当する。
【0069】
図12に示すように、支持位置変化機構55は、各エアバッグ51〜53と接続される切換弁56a,56b,56cと、切換弁56a,56b,56cを介して各エアバッグ51〜53へエアを供給するエアポンプ57とを備えている。切換弁56a,56b,56cを切り換えることにより、各エアバッグ51〜53のうち膨張させる一つ又は1組を選択する。切換弁56a,56b,56cは対応するエアバッグ51,52,53に対して給気を行う給気位置と排気を行う排気位置とに切り換えられる。なお、切換弁56a,56b,56cの全てを給気位置に切り換えたり、排気位置に切り換えたりすることにより、エアバッグ51〜53の全てを膨張させたり、全てを収縮させたりすることも可能である。
【0070】
図13に示すように、メイン制御部30には、支持位置変化機構55を駆動制御する第2制御部58と、揺動周波数制御部32とが電気的に接続されている。第2制御部58は、支持位置変化機構55を構成するエアポンプ57の駆動制御と、切換弁56a,56b,56c(いずれも図12参照)の切換え制御とを司る。
【0071】
第2制御部58は、身体の支持位置を指定して複数のエアバッグ51〜53の膨張と収縮の制御信号を支持位置変化機構55に出力することにより、エアバッグ51〜53による支持制御を行う。このため、第2制御部58は、制御信号を出力した時点でエアバッグ51〜53による支持位置を把握している。
【0072】
メイン制御部30は、支持位置を基に参照データを参照して揺動制御に必要な揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、支持位置から決まる揺動支点を支点とする身体の揺動部位の変化に応じて、揺動周波数を変化させる。なお、メイン制御部30及び揺動周波数制御部32は、参照データから取得される揺動部位に対応する揺動周波数制御情報に基づき、図6〜図10のいずれかのグラフで示される揺動部位に対応する揺れパターンで揺動制御を行う。
【0073】
次に本実施形態のマッサージ機10の作用を説明する。
操作部34により身体Sの支持位置を下降させる操作がなされると、第2制御部58は、エアポンプ57を駆動するとともに、切換弁56aを給気位置に、他の切換弁56b,56cを排気位置にそれぞれ切り換える。この結果、図15(a)に示すように、脚支持部18のエアバッグ51のみが膨張して下腿が押し上げ支持される。このように下腿が支持された状態では、例えば膝部が揺動支点Pとなり、下腿と足が揺動部位となる。また、操作部34により身体Sの支持位置を上昇させる操作がなされると、第2制御部58は、エアポンプ57を駆動するとともに、切換弁56bを給気位置に、他の切換弁56a,56cを排気位置にそれぞれ切り換える。この結果、図15(b)に示すように、座部12のエアバッグ52のみが膨張して臀部が押し上げ支持される。この場合、臀部が揺動支点Pとなり、脚全体が揺動部位となる。また、揺動部位をさらに広い範囲としたい場合、操作部34を操作して、図14(c),図15(c)に示すように椅子をフラットな状態に角度調整したうえで、操作部34により身体Sの支持位置を上昇させる操作を行う。この操作信号を入力した第2制御部58は、エアポンプ57を駆動するとともに、切換弁56cを給気位置に、他の切換弁56a,56bを排気位置にそれぞれ切り換える。この結果、図15(c)に示すように、椅子がフラットになって身体Sが仰臥姿勢にある状態で背もたれ部13のエアバッグ53のみが膨張し、背中が押し上げ支持される。この場合、背中の支持位置が揺動支点Pとなり、腰を含む下半身が揺動部位となる。
【0074】
このように身体Sの支持位置が変化することにより揺動支点Pが変化し、これに伴い揺動部位が変化する。そして、本実施形態では、エアバッグ51〜53のうち膨張させるものの位置(身体支持位置)から規定される揺動部位に応じて、オットマン15を揺動させる際の揺れパターンが、図6〜図10のグラフに示すように変化する。また、脚支持部18としてエアバッグ式の脚支持部41(図11)を採用した構成の場合は、エアバッグ42による脚Kの把持位置の変化と、エアバッグ51〜53の押上げによる支持位置の変化を組み合わせることができる。
【0075】
(11)第7実施形態によれば、椅子に複数のエアバッグ51〜53を配置し、膨張させるエアバッグの位置を変化させて身体Sの支持位置を変えることにより、揺動支点Pを変えて揺動部位を変化させる構成なので、比較的簡単な構成で身体の揺動部位を変化させることができる。また、膨張させるエアバッグ51〜53の位置(身体支持位置)の変化に応じた身体の揺動部位の変化に対応して、オットマン15の揺れパターンを変化させるので、ほぐし効果を高めることができる。さらに、脚に限らず、身体の広い部分を揺動部位にできるので、脚に限らず、腰、背筋など身体全体のほぐし効果が得られる。また、図6〜図10に示す揺れパターンの採用によって、身体の揺動運動を行うときに、前記第1〜第5実施形態と同様の効果を得ることができる。
【0076】
(第8実施形態)
次に第8実施形態を図16〜図20に従って説明する。第8実施形態では、リクライニング機構などの傾動機構の傾動角を変化させて、使用者の姿勢を変化させることにより揺動部位を変化させる構成である点が、前記各実施形態と異なる。なお、前記各実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0077】
図16に示すように、マッサージ機10には、オットマン15の脚支持部18に左右列に3個ずつの計6個のエアバッグ51が設けられ、座部12に4個のエアバッグ52が設けられ、さらに背もたれ部13に4個のエアバッグ53が設けられている。詳しくは、脚支持部18には、上段・中段・下段のそれぞれに左右一対ずつのエアバッグ51が内装されている。また、座部12には、前側・後側のそれぞれに左右一対ずつのエアバッグ52が内装されている。さらに、背もたれ部13には、上段・下段のそれぞれに左右一対ずつのエアバッグ53が内装されている。なお、図16では、脚支持部18を、説明の便宜上、板状に描いているが、実際は第1実施形態と同様に平面視で断面U字状の形状を有している。但し、脚支持部18は、昇降式でも固定式でもよい。また、脚支持部18は、第6実施形態のエアバッグ42を備えた脚支持部41とすることもできる。
【0078】
各エアバッグ51〜53は個別に膨張・収縮が可能である。エアバッグ51〜53のうち膨張した一つが身体の対応する箇所、すなわち下腿、臀部、背中のうちの一つを押し上げ、その押し上げられた箇所で身体が支持される。この身体の支持位置の変化に応じて、オットマン15が揺動したときの身体の揺動支点が変化する。このため、本実施形態の各エアバッグ51〜53等も、前記第7実施形態と同様に、支持位置変化機構55を構成している。
【0079】
図16に示すように、支持位置変化機構55は、複数個(6個)の各エアバッグ51と接続される第1切換弁61と、複数個(4個)の各エアバッグ52と接続される第2切換弁62と、複数個(4個)の各エアバッグ53と接続される第3切換弁63とを備えている。各切換弁61〜63は、接続された複数のエアバッグを個別に膨張・収縮できる給気位置と排気位置とに切り換えられる複数の切換弁を含む切換弁群により構成されている。各切換弁61〜63が切り換え制御されることにより、6個のエアバッグ51、4個のエアバッグ52、4個のエアバッグ53を個別に膨張収縮することが可能である。本実施形態では、脚支持部18、座部12、背もたれ部13毎に複数個設けられたエアバッグの個々を個別に膨張収縮させることにより、膨張させるエアバッグの組合せによって、身体の支持位置の変更の他、例えば対角に位置するエアバッグを膨張させることなどにより、身体にひねりを加えることも可能である。
【0080】
本実施形態のマッサージ機10は、図17に示す姿勢調整機構65を備えている。図17に示すように、座部12の下側に設けられた姿勢調整機構65は、座部12に対するオットマン15(つまり脚支持部18)の傾動角θ1を変更する第1角度調整機構71と、座部12に対する背もたれ部13の傾動角θ2を変更する第2角度調整機構76とを備えている。第1角度調整機構71は、動力源となる第1モータ72と、第1モータ72の出力軸に接続されるボールねじ73aを有する第1伸縮体73とを備える。第1モータ72は、座部12の下面から下方へ延出する支持フレーム75に対して支持軸74を介して姿勢変更可能に支持されている。第1伸縮体73の第1モータ72側と反対側の端部は、脚支持部18に対して回動可能に連結されている。
【0081】
第1伸縮体73は、第1モータ72が正転駆動されてボールねじ73aが正転することにより伸長し、この伸長により、脚支持部18は傾動角θ1が小さくなる方向(つまり二点鎖線で示す上昇側)に傾動する。一方、第1伸縮体73は、第1モータ72が逆転駆動されてボールねじ73aが逆転することにより収縮し、この収縮により、脚支持部18は傾動角θ1が大きくなる方向(つまり実線で示す下降側)に傾動する。
【0082】
一方、第2角度調整機構76には、動力源となる第2モータ77と、第2モータ77の出力軸に接続されるボールねじ78aを有する第2伸縮体78とを備える。第2モータ77は、支持フレーム75に対して支持軸79を介して姿勢変更可能に支持されている。第2伸縮体78の第2モータ77側と反対側の端部は、背もたれ部13の基端部に対して回動可能に連結されている。
【0083】
第2伸縮体78は、第2モータ77が正転駆動されてボールねじ78aが正転することにより伸長し、この伸長により、背もたれ部13は傾動角θ2が小さくなる方向(つまり実線で示す上昇側)に傾動する。一方、第2伸縮体78は、第2モータ77が逆転駆動されてボールねじ78aが逆転することにより収縮し、この収縮により、背もたれ部13は傾動角θ2が大きくなる方向(つまり二点鎖線で示す下降側)に傾動する。
【0084】
マッサージ機10は、姿勢調整機構65の駆動により、例えば図17に実線で示す椅子の姿勢に調整されたり、同図に二点鎖線で示すリクライニング姿勢に調整されたりする。なお、姿勢調整機構65は、前記第1〜第7実施形態にも設けられている。また、本実施形態では、姿勢調整機構65が、揺動部位変化手段に相当する。
【0085】
図18に示すように、メイン制御部30には、支持位置変化機構55を駆動制御する第2制御部58と、姿勢調整機構65を駆動制御する第3制御部66と、揺動駆動部19を駆動制御する揺動周波数制御部32とが電気的に接続されている。第2制御部58は、支持位置変化機構55を構成するエアポンプ57の駆動制御と、各切換弁61〜63の切換え制御とを司る。
【0086】
第2制御部58は、身体の支持位置を指定して複数のエアバッグ51〜53の膨張と収縮の制御信号を支持位置変化機構55に出力することにより、エアバッグ51〜53による支持制御を行う。このため、第2制御部58は、制御信号を出力した時点でエアバッグ51〜53による身体の支持位置を把握している。
【0087】
メイン制御部30は、操作部34から姿勢調整指示信号を入力すると、その信号で指示された姿勢に調整すべく第3制御部66に対して姿勢調整機構65の駆動制御を指示する。姿勢調整機構65には、オットマン15(つまり脚支持部18)の傾動角θ1と、背もたれ部13の傾動角θ2とを個別に検出可能なセンサ67が設けられている。センサ67としては、例えば角度センサが用いられる。第3制御部66は、背もたれ部13を後方へ倒す方向へ操作されたときは、背もたれ部13及びオットマン15を図17に二点鎖線で示す側へ傾動させ、一方、背もたれ部13が起き上がる方向へ操作されたときは、背もたれ部13及びオットマン15を図17に実線で示す側へ傾動させる。このときの傾動角θ1,θ2はセンサ67の検出値から取得される。
【0088】
メイン制御部30は、第3制御部66を介してセンサ67が検出した傾動角θ1,θ2を取得し、傾動角θ1,θ2を基にマッサージ機10の姿勢を判定する。例えば、メイン制御部30は、傾動角θ1,θ2を基に、図19(a)に示す椅子の姿勢(θ2が「小」の姿勢)であるか、図19(b)に示すやや傾動させたリラックス姿勢(θ2が「中」の姿勢)であるか、図19(c)に示すライニング姿勢(寝姿勢)(θ2が「大」の姿勢)であるかを判定する。これらの姿勢の違いによって、オットマン15を左右方向に揺動させた際の身体の揺動支点Pが変化し、この揺動支点Pの変化によって身体の揺動部位が変化する。なお、傾動角θ1,θ2のうち、座部12に対する背もたれ部13の傾動角θ2のみから姿勢を判断してもよい。
【0089】
マッサージ機10が、例えば図20(a)に示す椅子の姿勢にあるときは、身体Sの揺動支点Pは膝に位置し、下腿と足が揺動部位となる。また、図20(b)に示すリラックス姿勢にあるときは、身体Sの揺動支点Pは臀部に位置し、この脚部全体が揺動部位となる。さらに、図20(c)に示すライニング姿勢にあるときは、身体Sの揺動支点Pは背中上部に位置し、ほぼ全身(詳しくは背中上部から足先までの範囲)が揺動部位となる。なお、揺動支点Pは、マッサージ機10の姿勢の他、座部12や背もたれ部13等のクッション性など他の要因にも依存して変化するため、図20に示す揺動支点Pは一例に過ぎない。
【0090】
図18に示すメイン制御部30は、メモリに、傾動角θ1,θ2から決まる姿勢と、揺れパターンとの対応関係を示す参照データを記憶している。メイン制御部30は、姿勢(傾動角θ1,θ2)を基に、参照データを参照して揺動制御に必要な揺動周波数制御情報を取得し、その揺動周波数制御情報に基づき揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、姿勢から決まる揺動支点Pを支点とする身体の揺動部位の変化に応じて、揺動周波数を変化させる。
【0091】
次に本実施形態のマッサージ機10の作用を説明する。
操作部34により姿勢を変化させる操作がなされると、メイン制御部30からの指示に従って、第3制御部66は各モータ72,77を駆動する。マッサージ機10が図19(a)に示す椅子の姿勢になった場合、図20(a)に示すように、揺動支点Pが膝となり、下腿と足が揺動部位となる。また、マッサージ機10が図19(b)に示すリラックス姿勢になった場合、図20(b)に示すように、揺動支点Pが臀部となり、脚部全体が揺動部位となる。さらに、マッサージ機10が図19(c)に示すライニング姿勢になった場合、図20(c)に示すように、揺動支点Pが背中上部となり、ほぼ全身が揺動部位となる。
【0092】
メイン制御部30は、センサ67が検出した傾動角θ1,θ2に基づき姿勢を判定し、その判定した姿勢を基に参照データを参照して、姿勢に対応する揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。揺動周波数制御部32は、姿勢の変化に応じた異なる揺れパターンで、オットマン15の揺動制御を行う。
【0093】
図6〜図10のグラフで示す揺れパターンが採用される例では、姿勢に応じて、揺動部位が、図20(a)に示すように下腿と足の場合と、図20(b)に示すように脚部全体の場合と、図20(c)に示すようにほぼ全身の場合とで、各グラフで示すような異なる揺れパターンでオットマン15の揺動が行われる。
【0094】
さらに、本実施形態では、エアバッグ51〜53のうち膨張させるエアバッグの位置から規定される身体の支持位置と、姿勢調整機構65による姿勢との組合せにより、揺動支点Pがさらに多様に変化する。そして、メイン制御部30がメモリに記憶する参照データには、エアバッグ51〜53による身体の支持位置と、姿勢調整機構65による姿勢との組合せから決まる身体の揺動部位と揺れパターンとの対応関係も設定されている。また、脚支持部18として、エアバッグ42を備えた脚支持部41(図11)を採用する構成の場合は、メイン制御部30がメモリに記憶する参照データには、エアバッグ42による脚Kの把持位置と、エアバッグ51〜53による身体の支持位置と、姿勢調整機構65による姿勢との組合せから決まる身体の揺動部位と揺れパターンとの対応関係が設定されている。メイン制御部30は揺動部位を特定すると、参照データを参照してその揺動部位に対応する揺動周波数制御情報を取得し、その周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。この結果、オットマン15の脚支持部18は、身体の揺動部位に応じて、図6〜図10のグラフに示す揺れパターンで揺動する。
【0095】
(12)第8実施形態によれば、マッサージ機10の姿勢を変化させることにより、揺動支点Pを変化させる構成なので、比較的簡単な構成で揺動部位を変化させることができる。マッサージ機10の姿勢の変化(つまり身体の揺動部位の変化)に応じて、オットマン15の揺動時における揺れパターンを変化させるので、身体をほぐす効果を高めることができる。また、図6〜図10に示す揺れパターンの採用によって、脚部以外の身体のより広い部位を揺動させるときにも、前記第1〜第5実施形態と同様の効果を得ることができる。また、エアバッグ51〜53の膨張・収縮により身体のひねり等の姿勢を変化させることもできるので、脚支持部18や背もたれ部13の傾動角θ1,θ2を変更する機構との組合せにより、より様々な姿勢に変化させることができる。そして、種々の姿勢に応じた揺動部位の変化に応じて揺れパターンを変化させるので、種々の姿勢に応じた適切な揺れパターンで身体の一部を揺動させ、より高いほぐし効果を得ることができる。
【0096】
(第9実施形態)
次に第9実施形態を図21に従って説明する。なお、以下に示す第9〜第13実施形態は、身体の揺動部位が大きいほど、つまり揺動支点Pを支点として揺動するときの揺動腕長さが長いほど、揺動周波数を低くする点が、前記各実施形態と異なる。この第9実施形態は、第1実施形態と基本構成は同じであり、揺動部位と揺れパターンとの対応関係のみ異なる。第1実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0097】
図21に示すように、脚支持部18の昇降位置に応じて揺動部位は変化する。例えば図21(a)に示すように、脚支持部18が下降位置にあるときは、下腿の下部と足が揺動部位となる。この場合、揺動部位が比較的小さく、揺動腕長さが比較的短い。また、図21(c)に示すように、脚支持部18が上昇位置にあるときは、大腿を含む脚全体が揺動部位となる。この場合、揺動部位が比較的大きく、揺動腕長さが比較的長い。そして、図21(b)に示すように、脚支持部18が中間位置にあるときは、下腿全体が揺動部位となる。この場合、揺動部位は、下降位置と上昇位置にあるときの各揺動部位の中間の大きさとなり、揺動腕長さも同様に中間の長さになる。
【0098】
メイン制御部30がメモリに記憶する参照データは、脚支持部18の昇降位置から決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、脚支持部18の昇降位置に基づき参照データを参照し、揺動部位が大きいほど、揺動周波数のより低い揺れパターンの揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0099】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、脚支持部18が図21(a)に示す下降位置にあるときに高い揺動周波数F3とし、図21(c)に示す上昇位置にあるときに低い揺動周波数F1とし、図21(b)に示す中間位置にあるときに中間の揺動周波数F2とする(F3>F2>F1)。また、図7〜図10に示す揺れパターンを採用した場合、図21(a)が図7〜図10における揺動部位Bに相当し、図21(b)が同じく揺動部位Aに相当し、図21(c)が同じく揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位A,B,Cに応じた揺れパターンでオットマン15を揺動制御する。
【0100】
(13)第9実施形態によれば、脚支持部18の支持位置を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンで揺動させるので、脚Kの揺動部位の揺動量を好適に大きくすることができ、脚Kをほぐす効果を高めることができる。
【0101】
(第10実施形態)
次に第10実施形態を図22に従って説明する。本実施形態は、第6実施形態と同様のエアバッグ式の脚支持部41を有するオットマンを備えたマッサージ機であり、前記第9実施形態と同様に、身体の揺動部位が大きいほど、揺動周波数のより低い揺れパターンを採用する点に特徴がある。なお、第6実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0102】
図22(a)に示すように、下段のエアバッグ42aのみが膨張して下腿の下部を把持するときは、下腿の下部と足が揺動部位となり、揺動部位が比較的小さい(揺動腕長さが短い)。また、図22(b)に示すように、上段のエアバッグ42bのみが膨張して下腿の上部を把持するときは、脚全体が揺動部位となり、揺動部位が比較的大きい(揺動腕長さが長い)。
【0103】
メイン制御部30がメモリに記憶する参照データは、膨張したエアバッグ42の位置(つまり脚の支持位置)から決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、膨張したエアバッグ42の位置に基づき参照データを参照し、揺動部位が大きいほど、揺動周波数のより低い揺れパターンの揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0104】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、下段のエアバッグ42aのみが膨張して下腿の下部を把持するときは、相対的に高い揺動周波数F2とし、図22(b)に示すように、上段のエアバッグ42bのみが膨張して下腿の上部を把持するときは、相対的に低い揺動周波数F1とする(F2>F1)。
【0105】
また、図7〜図10に示す揺れパターンを採用した場合、図22(a)が図7〜図10における揺動部位Bに相当し、図22(b)が同じく揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位B,Cに応じた揺れパターンでオットマン15を揺動制御する。なお、本実施形態では、揺動部位が二段階で変化するため、図6〜図10における揺動部位Aは省かれる。
【0106】
(14)第10実施形態によれば、エアバッグ42の膨張位置を変化させて脚Kの支持位置を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンでオットマン15を揺動制御する。このため、脚Kの揺動部位の揺動量を好適に大きくすることができ、脚Kをほぐす効果を高めることができる。
【0107】
(第11実施形態)
次に第11実施形態を図23に従って説明する。本実施形態は、第7実施形態と同様のエアバッグ51〜53を備えたマッサージ機であり、前記第9及び第10実施形態と同様に、身体の揺動部位が大きいほど、揺動周波数のより低い揺れパターンを採用する点に特徴がある。なお、第7実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0108】
図23(a)に示すように、脚支持部18のエアバッグ51のみが膨張して下腿を支持するときは、下腿と足が揺動部位となる。この場合、揺動部位が比較的小さく、揺動腕長さが比較的短い。また、図23(c)に示すように、背もたれ部13のエアバッグ53のみが膨張して背中を支持する状態で、かつ椅子が図14(c),図15(c)に示すようにフラットになった状態では、脚と腰を含む下半身全体が揺動部位となる。この場合、揺動部位が比較的大きく、揺動腕長さが比較的長い。さらに図23(b)に示すように、座部12のエアバッグ52のみが膨張して臀部を支持するときは、脚全体が揺動部位となる。この場合、揺動部位は、相対的に中間の大きさとなり、揺動腕長さも同様に中間の長さになる。
【0109】
メイン制御部30がメモリに記憶する参照データは、エアバッグ51〜53のうち膨張した一つの位置から決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、エアバッグ51〜53のうち膨張した一つの位置に基づき参照データを参照し、そのときの揺動部位に対応する揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0110】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、図23(a)に示すように、脚支持部18のエアバッグ51のみが膨張し揺動部位が比較的小さいときは、オットマン15を高い揺動周波数F3で揺動させる。また、図23(c)に示すように、背もたれ部13のエアバッグ53のみが膨張し、かつ椅子が図14(c),図15(c)に示すようにフラットになった状態で揺動部位が比較的大きいときは、オットマン15を低い揺動周波数F1で揺動させる。さらに、図23(b)に示すように、座部12のエアバッグ52のみが膨張し揺動部位が中間の大きさのときは、オットマン15を中間の揺動周波数F2で揺動させる。
【0111】
また、図7〜図10に示す揺れパターンを採用した場合、図23(a)が図7〜図10における揺動部位Bに相当し、図23(b)が揺動部位Aに相当し、図23(c)で椅子がフラットな状態が揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位A,B,Cに応じた揺れパターンでオットマン15を揺動制御する。
【0112】
(15)第11実施形態によれば、エアバッグの膨張位置を変化させて揺動支点を変えることにより揺動部位を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンで揺動させるので、身体の揺動部位の揺動量を好適に大きくすることができ、身体をほぐす効果を高めることができる。
【0113】
(第12実施形態)
次に第12実施形態を図24に従って説明する。本実施形態は、第8実施形態と同様の姿勢調整機構65を備えたマッサージ機であり、前記第9〜第11実施形態と同様に、身体の揺動部位が大きいほど、揺動周波数のより低い揺れパターンを採用する点に特徴がある。なお、第8実施形態と同様の構成については同一の符号を付して、その説明の一部又は全部を省略する。
【0114】
図24(a)に示すように、マッサージ機10が椅子の姿勢にあるときは、下腿と足が揺動部位となる(図20(a)参照)。この場合、揺動部位が比較的小さく、揺動腕長さが比較的短い。また、図24(c)に示すように、マッサージ機10がライニング姿勢にあるときは、背中上部から足先までのほぼ全身が揺動部位となる(図20(c)参照)。この場合、揺動部位が比較的大きく、揺動腕長さが比較的長い。さらに、図24(b)に示すように、マッサージ機10がリラックス姿勢にあるときは、脚部全体が揺動部位となる(図20(b)参照)。この場合、揺動部位は、相対的に中間の大きさとなり、揺動腕長さも同様に中間の長さになる。
【0115】
メイン制御部30がメモリに記憶する参照データは、姿勢に応じて決まる揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンが選択されるように設定されている。メイン制御部30は、姿勢に基づき参照データを参照して、そのときの揺動部位に対応する揺動周波数制御情報を取得し、その揺動周波数制御情報を指定して揺動周波数制御部32に揺動駆動部19の駆動制御を指示する。
【0116】
例えば第1実施形態と同様の図6に示す揺れパターンを採用する例では、図24(a)に示すように、マッサージ機10が椅子の姿勢にあり揺動部位が比較的小さいときは、オットマン15を高い揺動周波数F3で揺動させる。また、図24(c)に示すように、マッサージ機10がライニング姿勢にあり揺動部位が比較的大きいときは、オットマン15を低い揺動周波数F1で揺動させる。さらに、図24(b)に示すように、マッサージ機10がリラックス姿勢にあり揺動部位が中間の大きさのときは、オットマン15を中間の揺動周波数F2で揺動させる。
【0117】
また、図7〜図10に示す揺れパターンを採用した場合、図24(a)が図7〜図10における揺動部位Bに相当し、図24(b)が揺動部位Aに相当し、図24(c)が揺動部位Cに相当する。そして、メイン制御部30及び揺動周波数制御部32は、図7〜図10における揺動部位A,B,Cに応じた揺れパターンでオットマン15を揺動制御する。
【0118】
(16)第12実施形態によれば、マッサージ機10の姿勢を変化させて身体の揺動支点Pを変えることにより身体の揺動部位を変化させる構成において、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数のより低い揺れパターンで揺動させるので、身体の揺動部位の揺動量を好適に大きくすることができ、身体をほぐす効果を高めることができる。
【0119】
なお、実施形態は、以下に示す態様で実現することもできる。
・揺動部位の変化に応じて揺れパターンが変化する構成であればよく、揺動部位と揺れパターンとの対応関係は適宜設定できる。例えば揺動部位が大きいほど、揺動周波数の高い揺れパターンを採用してもよい。例えば第1実施形態において、脚支持部18が高い位置にあるときほど揺動周波数Fを高くしたり、第6実施形態において、エアバッグ42による脚の把持位置が高い位置にあるときほど揺動周波数Fを高くしたりしてもよい。さらに第7実施形態において、エアバッグ51〜53のうち膨張させるものの選択(つまり身体支持部位の選択)により決まる揺動部位の揺動腕長さが短いときほど揺動周波数Fを高くしたり、第8実施形態において、選択された傾動角θ1,θ2(つまり姿勢)から決まる揺動部位の揺動腕長さが短いときほど揺動周波数Fを高くしたりしてもよい。
【0120】
・第1〜第5実施形態におけるオットマン15に設けられた昇降式の脚支持部18に、さらに第6実施形態(図11)における複数のエアバッグ42を設けた構成を採用し、揺動部位の変化と脚支持部18の揺れパターンの変化とを対応付けて制御するようにしてもよい。同様に、第9実施形態(図21)におけるオットマン15に設けられた昇降式の脚支持部18に、さらに第10実施形態(図22)における複数のエアバッグ42を設けた構成を採用し、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺動周波数を低くする制御を行ってもよい。なお、第6、第10実施形態及び本変形例等において、脚支持部41(18)の脚方向に沿って配設するエアバッッグの個数(段数)は、3個(上中下3段)あるいは4個以上とすることもできる。
【0121】
・第1〜第6、第9及び第10実施形態において、背押圧部20a、腰押圧部20b及び座押圧部20cのうち選択した一つを膨張させることで身体の揺動支点を変化させる構成を、脚の支持位置を変化させる機能を有するオットマン15と組み合わせて揺動部位変化手段を構成し、揺動部位をより多様に変化させてもよい。また、第7、第8、第11及び第12実施形態において、第1又は第6実施形態のオットマン15を採用してもよい。
【0122】
・前記第7、第8、第11及び第12実施形態において、椅子(椅子型のマッサージ機)の身体支持面側に突出と退避とが可能に設けられた複数の支持部として、エアバッグ51〜53を採用したが、空気等の気体により膨張(突出)・収縮(退避)する気体バッグに限らず、水やオイル等の液体により膨張・収縮する液体バッグなどを含む流体バッグであればよい。さらにシリンダやソレノイド等のアクチュエータの動力で、突出・退避する複数の支持部を採用して揺動部位変化手段を構成してもよい。
【0123】
・揺動部位の変化と揺れパターンの変化は同時であることに限定されず、揺動部位の切り換わりタイミングと、揺れパターンの切り換わりタイミングとが、多少ずれた略同時でもよい。例えば操作部34からの操作信号に基づき揺動部位変化手段の駆動を開始して揺動部位の変化が開始してから少しのタイムラグの後に揺動周波数の変化を開始したり、操作部34からの操作信号に基づきまず揺動周波数の変化を開始してから少しのタイムラグの後に揺動部位変化手段の駆動を開始したりしてもよい。
【0124】
・第2実施形態(図7)及び第3実施形態(図8)では、揺動部位が大きいほど(つまり揺動腕長さが長いほど)、揺らぎ幅を大きくしたが、これとは逆に、揺動部位が小さいほど(つまり揺動腕長さが短いほど)、揺らぎ幅を大きくしてもよい。
【0125】
・図7、図8に示すような揺動周波数の揺らぎは、正弦波などの曲線状の波形の揺らぎに限定されない。例えば矩形波や三角波の揺らぎでもよい。また、異なる揺動部位に対応する揺れパターンが異なっていれば、例えば一つの揺動実施期間において異なる揺らぎ幅が混在していたり、揺動周波数が一定の期間と揺らぎをもつ期間とが混在していたりしてもよい。
【0126】
・図8において、異なる揺動部位に対応する揺れパターン間で揺らぎ幅と揺らぎ周波数のうち一方が同じである揺れパターンや、揺らぎ幅と揺らぎ周波数が共に同じである揺れパターンを採用してもよい。また、図8において、揺らぎをもつ揺れパターンの揺動部位と、揺らぎのない揺れパターンの揺動部位とが混在してもよい。
【0127】
・図10において、サイクルが異なると、同じ揺動部位でも異なる揺動周波数が設定されてもよい。
・第4実施形態において、揺動周波数を漸進的に変化させる期間は、揺動部位の切り換わり時点で終了するように設定してもよいし、揺動部位の切り換わり時点で開始されるように設定してもよい。また、揺動周波数変化率(傾き)を、切り換わり前後の揺動周波数の差に拘わらず一定にしてもよい。さらに揺動周波数を漸進的に変化させる軌跡は、一定の傾きではなく、曲線状であってもよい。
【0128】
・第2、第3、第5実施形態(図7、図8、図10)において、揺動部位の変化時に、揺れパターンを漸進的に変化させてもよい。
・第5実施形態において、揺動部位の変化に対応して揺れパターンを変化させるサイクルにおいて、揺動周波数に替えて、揺らぎ方(揺らぎ幅と揺らぎ周波数のうち少なくとも一方)のみ、又は揺動周波数と揺らぎ方とを共に、揺動部位の変化に対応して変化させてもよい。
【0129】
・異なる揺動部位間で揺れパターンが全て異なる必要はない。複数の揺動部位のうち揺れパターンが異なるものが少なくとも二つあれば足りる。第1、第3〜第5実施形態(図6、図8〜図10)では、揺動部位が変化すると、揺動実施期間における揺動周波数の平均値が異なるように揺動周波数を変化させたが、複数の揺動部位のうち揺動周波数(少なくとも平均値)が異なるものが少なくとも二つあれば足りる。また、第2、第3実施形態(図7、図8)において、複数の揺動部位のうち揺らぎ幅が異なるものが少なくとも二つあれば足りる。例えば揺動部位を変化させるために操作部34を操作し続けると、異なる揺動部位A,B,Cの順に変化する構成において、揺動部位A,B(少なくとも二つ)の揺れパターンが異なっていれば、揺動部位A,Cが同じ揺動周波数であってもよい。
【0130】
・第1〜第5実施形態において、脚支持部18の昇降位置が連続的に変化するのに伴う揺動部位の連続変化に応じて、揺れパターン(例えば揺動周波数、揺らぎ幅、揺らぎ周波数、あるいはこれらのうち少なくとも二つの組合せ)を連続的に変化させる構成も採用できる。また、第8、第12実施形態において、マッサージ機の姿勢が連続的に変化するのに伴う揺動部位の連続変化に応じて、揺れパターン(例えば揺動周波数、揺らぎ幅、揺らぎ周波数、あるいはこれらのうち少なくとも二つの組合せ)を連続的に変化させる構成も採用できる。
【0131】
・揺動装置はマッサージ機に限定されない。例えばもみ玉等のマッサージ機能を備えない椅子にオットマンを設けた構成でもよい。さらに、例えば仰臥の姿勢で足を載せる足載置台と、足載置台を左右方向に揺動させる揺動駆動手段とを備え、いわゆる金魚運動を行うための揺動装置に適用してもよい。
【0132】
・支持手段の揺動方向は、左右方向以外の方向であってもよい。例えば支持手段を前後方向に揺動させたり、左右方向と前後方向とを含む2種以上の揺動方向の中から使用者が選択できる構成としたり、左右方向と前後方向とを含む2種類以上の揺動方向を組み合わせた揺動方向に揺動させたり、左右方向と前後方向とを含む2種類以上の異なる揺動方向の揺動を合成した方向に揺動させたりしてもよい。
【0133】
・身体の一部を支持する支持手段は、脚を支持するオットマン15(脚支持部18)に限定されない。脚以外の身体の一部を支持する揺動手段を揺動させる揺動装置であってもよい。例えば上腿を支持して揺動させる揺動装置、胴体(腰、脇腹あるいは肩など)を支持して揺動させる揺動装置、腕を支持して揺動させる揺動装置、頭部を支持して揺動させる揺動装置であってもよい。この場合、脚以外の身体の一部を身体支持部により支持してもよいし、エアバッグ等の把持手段により脚以外の身体の一部を把持してもよい。これらの揺動装置であっても、揺動部位(支持手段による支持位置に応じた揺動部位、あるいは揺動部位変化手段により変化する揺動部位)の変化に対応して支持手段の揺れパターンが変化することにより、身体をほぐす効果を高めることができる。
【符号の説明】
【0134】
10…揺動装置としてのマッサージ機、12…座部、13…背もたれ部、15…オットマン、18…支持手段及び脚支持手段としての脚支持部、19…揺動駆動手段としての揺動駆動部、20a…背押圧部、20b…腰押圧部、20c…座押圧部、23…揺動部位変化手段としての揺動部位変化機構、25…モータ、29…アクチュエータ、30…メイン制御部、31…第1制御部、32…揺動周波数制御部、33…揺動部位変化機構、34…操作部、36…センサ、40…揺動部位変化機構、41…支持手段を構成する脚支持部、42,42a,42b…支持手段を構成するエアバッグ、51〜53…支持手段を構成するとともに支持部としてのエアバッグ、55…揺動部位変化手段としての支持位置変化機構、65…揺動部位変化手段としての姿勢調整機構、67…センサ、71…第1角度調整機構、76…第2角度調整機構、A,B,C…揺動部位、F,F1〜F3…揺動周波数、Δf,Δf1〜Δf3…揺らぎ幅、θ1,θ2…傾動角、P…揺動支点、K…脚、S…身体。
【特許請求の範囲】
【請求項1】
使用者の身体を揺動させる揺動機能を備えた揺動装置において、
身体の一部を支持する支持手段と、
前記支持手段を揺動させる揺動駆動手段と、
前記支持手段が揺動するときの身体の揺動部位を変化させる揺動部位変化手段と、
前記揺動部位の変化と前記支持手段の揺動による揺れパターンの変化とを対応付けて前記揺動駆動手段を制御する制御手段と、
を備えたことを特徴とする揺動装置。
【請求項2】
前記制御手段は、前記揺動部位が異なれば、揺動周波数の異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することを特徴とする請求項1に記載の揺動装置。
【請求項3】
前記制御手段は、前記揺動部位が異なれば、前記揺動部位に対応する揺れパターンで揺動を実施する揺動実施期間における揺動周波数の平均値が異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することを特徴とする請求項1又は2に記載の揺動装置。
【請求項4】
前記揺動実施期間における揺動周波数の平均値が異なる制御は、前記揺動部位が大きい方が、前記揺動周波数の平均値を低くする制御であることを特徴とする請求項3に記載の揺動装置。
【請求項5】
前記揺動部位の変化と揺れパターンの変化が対応付けられた制御は、前記揺動部位が異なれば、揺動周波数のゆらぎ幅を異ならせる制御であることを特徴とする請求項1乃至4のいずれか一項に記載の揺動装置。
【請求項6】
前記揺動部位変化手段が揺動部位を変化させるのと略同時に、前記制御手段は揺れパターンを変化させることを特徴とする請求項1乃至5のいずれか一項に記載の揺動装置。
【請求項7】
前記揺動部位変化手段が揺動部位を変化させたとき、前記制御手段は前記揺動部位の変化に対応する揺れパターンへ漸進的に変化させることを特徴とする請求項1乃至6のいずれか一項に記載の揺動装置。
【請求項8】
前記揺動部位変化手段が揺動部位を変化させたときに、前記制御手段は揺れパターンを変化させる場合と変化させない場合の両方を含んだ制御を行うことを特徴とする請求項1乃至7のいずれか一項に記載の揺動装置。
【請求項9】
前記揺動部位変化手段は、前記支持手段が支持する身体の支持位置を変化させることを特徴とする請求項1乃至8のいずれか一項に記載の揺動装置。
【請求項10】
前記揺動部位変化手段は、前記支持手段が把持する身体の把持位置を変化させることを特徴とする請求項1乃至8のいずれか一項に記載の揺動装置。
【請求項11】
前記揺動部位変化手段は、前記支持手段に支持される支持位置以外の身体部位を支持し、当該身体部位の支持位置を変化させることを特徴とする請求項1乃至10のいずれか一項に記載の揺動装置。
【請求項12】
座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記椅子に突出と退避とが可能に設けられた複数の支持部を有し、前記複数の支持部のうち突出させるものを選択することにより、身体の支持位置を変化させることを特徴とする請求項11に記載の揺動装置。
【請求項13】
前記揺動部位変化手段は、身体の姿勢を変化させることを特徴とする請求項1乃至12のいずれか一項に記載の揺動装置。
【請求項14】
座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記座部に対する少なくとも前記背もたれ部の傾動角を変化させることを特徴とする請求項13に記載の揺動装置。
【請求項15】
前記支持手段は、使用者の脚の一部を支持する脚支持手段であり、
前記揺動駆動手段は、前記脚支持手段を揺動させることを特徴とする請求項1乃至14のいずれか一項に記載の揺動装置。
【請求項1】
使用者の身体を揺動させる揺動機能を備えた揺動装置において、
身体の一部を支持する支持手段と、
前記支持手段を揺動させる揺動駆動手段と、
前記支持手段が揺動するときの身体の揺動部位を変化させる揺動部位変化手段と、
前記揺動部位の変化と前記支持手段の揺動による揺れパターンの変化とを対応付けて前記揺動駆動手段を制御する制御手段と、
を備えたことを特徴とする揺動装置。
【請求項2】
前記制御手段は、前記揺動部位が異なれば、揺動周波数の異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することを特徴とする請求項1に記載の揺動装置。
【請求項3】
前記制御手段は、前記揺動部位が異なれば、前記揺動部位に対応する揺れパターンで揺動を実施する揺動実施期間における揺動周波数の平均値が異なる揺れパターンで前記支持手段を揺動させるように前記揺動駆動手段を制御することを特徴とする請求項1又は2に記載の揺動装置。
【請求項4】
前記揺動実施期間における揺動周波数の平均値が異なる制御は、前記揺動部位が大きい方が、前記揺動周波数の平均値を低くする制御であることを特徴とする請求項3に記載の揺動装置。
【請求項5】
前記揺動部位の変化と揺れパターンの変化が対応付けられた制御は、前記揺動部位が異なれば、揺動周波数のゆらぎ幅を異ならせる制御であることを特徴とする請求項1乃至4のいずれか一項に記載の揺動装置。
【請求項6】
前記揺動部位変化手段が揺動部位を変化させるのと略同時に、前記制御手段は揺れパターンを変化させることを特徴とする請求項1乃至5のいずれか一項に記載の揺動装置。
【請求項7】
前記揺動部位変化手段が揺動部位を変化させたとき、前記制御手段は前記揺動部位の変化に対応する揺れパターンへ漸進的に変化させることを特徴とする請求項1乃至6のいずれか一項に記載の揺動装置。
【請求項8】
前記揺動部位変化手段が揺動部位を変化させたときに、前記制御手段は揺れパターンを変化させる場合と変化させない場合の両方を含んだ制御を行うことを特徴とする請求項1乃至7のいずれか一項に記載の揺動装置。
【請求項9】
前記揺動部位変化手段は、前記支持手段が支持する身体の支持位置を変化させることを特徴とする請求項1乃至8のいずれか一項に記載の揺動装置。
【請求項10】
前記揺動部位変化手段は、前記支持手段が把持する身体の把持位置を変化させることを特徴とする請求項1乃至8のいずれか一項に記載の揺動装置。
【請求項11】
前記揺動部位変化手段は、前記支持手段に支持される支持位置以外の身体部位を支持し、当該身体部位の支持位置を変化させることを特徴とする請求項1乃至10のいずれか一項に記載の揺動装置。
【請求項12】
座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記椅子に突出と退避とが可能に設けられた複数の支持部を有し、前記複数の支持部のうち突出させるものを選択することにより、身体の支持位置を変化させることを特徴とする請求項11に記載の揺動装置。
【請求項13】
前記揺動部位変化手段は、身体の姿勢を変化させることを特徴とする請求項1乃至12のいずれか一項に記載の揺動装置。
【請求項14】
座部と背もたれ部とを少なくとも備えた椅子を備え、前記揺動部位変化手段は、前記座部に対する少なくとも前記背もたれ部の傾動角を変化させることを特徴とする請求項13に記載の揺動装置。
【請求項15】
前記支持手段は、使用者の脚の一部を支持する脚支持手段であり、
前記揺動駆動手段は、前記脚支持手段を揺動させることを特徴とする請求項1乃至14のいずれか一項に記載の揺動装置。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】

【図22】

【図23】

【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−42797(P2013−42797A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−180735(P2011−180735)
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]