
揺動選別装置
【課題】脱穀物を機体幅方向に分散させつつ後方へ搬送するフィードパンの作用を良好に維持することができる揺動選別装置を提供する。
【解決手段】揺動選別装置において、フィードパン202及びチャフシーブ機構203よりも上方において機体幅方向に関し揺動機枠201の略全域を覆い且つ機体前後方向に関し前記フィードパン202及び前記チャフシーブ機構203の境界208を跨いた状態で前記揺動機枠201と一体的に揺動するように前記揺動機枠201に直接又は間接的に支持された粗選機構210が備えられる。前記粗選機構210は、脱穀装置5から前記フィードパン202に向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパン202をバイパスさせて前記チャフシーブ機構203に送るように構成される。
【解決手段】揺動選別装置において、フィードパン202及びチャフシーブ機構203よりも上方において機体幅方向に関し揺動機枠201の略全域を覆い且つ機体前後方向に関し前記フィードパン202及び前記チャフシーブ機構203の境界208を跨いた状態で前記揺動機枠201と一体的に揺動するように前記揺動機枠201に直接又は間接的に支持された粗選機構210が備えられる。前記粗選機構210は、脱穀装置5から前記フィードパン202に向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパン202をバイパスさせて前記チャフシーブ機構203に送るように構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンバインに適用する揺動選別装置に関する。
【背景技術】
【0002】
穀稈搬送装置によって搬送される穀稈に対して脱穀処理を行う脱穀装置と、前記脱穀装置によって脱穀された脱穀物のうち一番物及び二番物をそれぞれ集約するように機体幅方向に沿って並列配置された一番樋及び二番樋とを備えたコンバインに、機体前後方向に一体的に揺動するフィードパン及びチャフシーブ機構を備えた揺動選別装置を適用することは従来から公知である(例えば、下記特許文献1参照)。
【0003】
このようなコンバインにおいては、比較的大きい穂切れ物等を多く含む脱穀物が前記脱穀装置から揺動選別装置に大量に落下する場合、当該揺動選別装置の選別機能が損なわれる。具体的には、例えば前記フィードパンにおいては、落下してきた穂切れ物によって脱穀物全体の流れが悪くなって、脱穀物を機体幅方向に分散させつつ後方へ搬送するという当該フィードパンの作用が損なわれる。そして、前記フィードパンの後方側に隣接する前記チャフシーブ機構においては、前記フィードパンに近接する前端部に前記フィードパンから送られてくる穂切れ物及び前記脱穀装置から直接落下してくる穂切れ物が集中して、この前端部における当該チャフシーブ機構の選別性能が損なわれる。特に前記脱穀装置に受網が備えられていない場合、この問題は顕著となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−074984号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、斯かる従来技術に鑑みなされたものであり、脱穀物を機体幅方向に分散させつつ後方へ搬送するフィードパンの作用を良好に維持することができる揺動選別装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、前記目的を達成するために、機体前後方向に揺動される揺動機枠と、前記揺動機枠に支持されたフィードパンと、前記フィードパンの後方側に隣接するように前記揺動機枠に支持されたチャフシーブ機構とを備えた揺動選別装置であって、扱胴を有する脱穀装置から落下する脱穀物を揺動選別して、当該揺動選別装置の下方において機体前後方向に順に配置された一番樋及び二番樋に振り分ける揺動選別装置において、前記フィードパン及び前記チャフシーブ機構よりも上方において機体幅方向に関し前記揺動機枠の略全域を覆い且つ機体前後方向に関し前記フィードパン及び前記チャフシーブ機構の境界を跨いた状態で前記揺動機枠と一体的に揺動するように前記揺動機枠に直接又は間接的に支持された粗選機構を備え、前記粗選機構は、前記脱穀装置から前記フィードパンに向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパンをバイパスさせて前記チャフシーブ機構に送るように構成されている揺動選別装置を提供する。
【発明の効果】
【0007】
本発明に係る揺動選別装置によれば、前記脱穀装置から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記フィードパン上に大きな穂切れ物が過度に落下することを前記粗選機構によって有効に防止でき、前記フィードパン上には主として所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、脱穀物を機体幅方向に分散させつつ後方へ搬送する前記フィードパンの作用を良好に維持することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態に係る揺動選別装置が適用されたコンバインの左側面図。
【図2】前記コンバインにおける脱穀装置、及び本発明の実施形態1に係る揺動選別装置を備えた選別装置の概略側面断面図。
【図3】前記脱穀装置及び前記選別装置の前端部付近の概略正面断面図。
【図4】前記脱穀装置における扱胴の扱歯の斜視図。
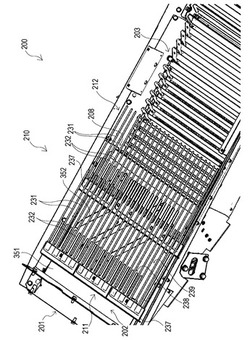
【図5】本発明の実施形態1に係る揺動選別装置の前部付近の斜視図。
【図6】本発明の実施形態1に係る前記揺動選別装置の前部付近の平面図。
【図7】本発明の実施形態1に係る前記揺動選別装置の前部付近の一部拡大平面図。
【図8】本発明の実施形態1に係る前記揺動選別装置の前部付近の側面断面図。
【図9】前記揺動選別装置における粗選機構の粗選ユニットの斜視図。
【図10】前記コンバインにおける脱穀装置、及び本発明の実施形態2に係る揺動選別装置を備えた選別装置の概略側面断面図。
【図11】本発明の実施形態2に係る揺動選別装置の前部付近の斜視図。
【図12】本発明の実施形態2に係る前記揺動選別装置の前部付近の平面図。
【図13】本発明の実施形態2に係る前記揺動選別装置の前部付近の一部拡大平面図。
【図14】本発明の実施形態2に係る前記揺動選別装置の前部付近の側面断面図。
【発明を実施するための形態】
【0009】
本発明に係る揺動選別装置の好ましい実施形態を、図面を参照しつつ説明する。図面において、同一の引用符号は、対応する又は同一の要素を示す。
【0010】
[実施形態1]
まず、本実施形態に係る揺動選別装置200が適用されたコンバイン1の全体的な構成について説明する。
【0011】
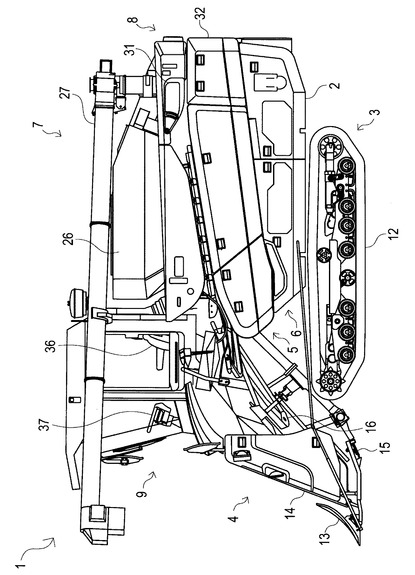
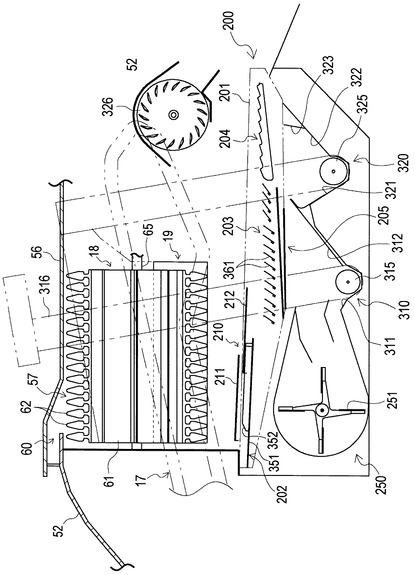
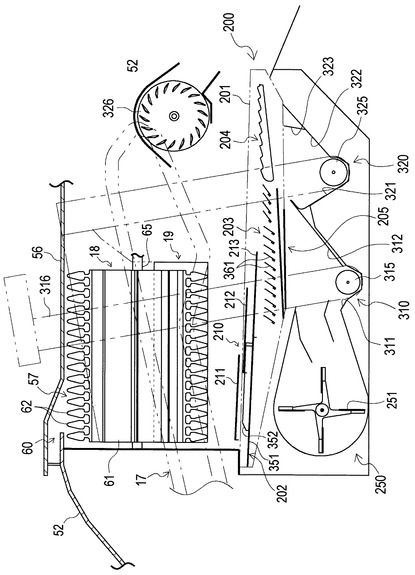
図1に、本実施形態に係る前記揺動選別装置200が適用された前記コンバイン1の左側面図を示す。図2に、前記コンバイン1における脱穀装置5、及び本実施形態に係る揺動選別装置200を備えた選別装置6の概略側面断面図を示す。図1及び図2に示すように、前記コンバイン1は、機体フレーム2を含む走行機体と、走行装置3と、刈取装置4と、前記脱穀装置5と、前記選別装置6と、穀粒貯溜装置7と、排藁処理装置8と、操縦部9とを備えている。なお、前記コンバイン1の機体前後方向を機体長手方向とし、機体左右方向を機体幅方向とする。
【0012】
前記走行装置3は、前記走行機体の下方に配置されている。前記走行装置3は、左右一対のクローラ12を備えている。この左右一対のクローラ12は、前記機体フレーム2に連結されている。
【0013】
前記刈取装置4は、前記走行機体の前方に配置されて、前記機体フレーム2に昇降可能に連結されている。前記刈取装置4は、分草具13と、引起装置14と、切断装置15、搬送装置16とを備えている。前記分草具13は、圃場の穀稈を分草できるように構成されている。前記引起装置14は、分草された穀稈を引き起こすことができるように構成されている。前記切断装置15は、引き起こされた穀稈を切断することができるように構成されている。前記搬送装置16は、切断後の穀稈を前記脱穀装置5に搬送できるように構成されている。
【0014】
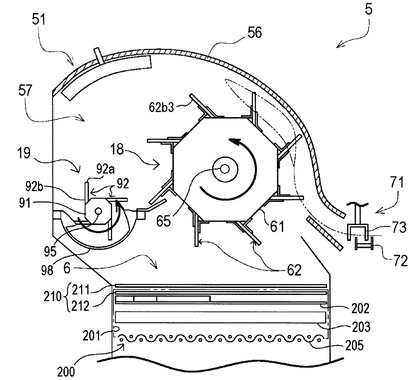
前記脱穀装置5は、前記刈取装置4の後方に配置されて、前記走行機体の左側部分に設けられている。図3に、前記脱穀装置5及び前記選別装置6の前端部付近の概略正面断面図を示す。図2及び図3に示すように、前記脱穀装置5は、穀稈搬送装置17と、扱胴18と、扱室57とを備えている。前記穀稈搬送機構17は、前記刈取装置4から搬送されてきた刈取後の穀稈の穂先部を前記扱室57内に導入しながら当該穀稈を後方へ搬送できるように構成されている。前記扱胴18は、搬送中の穀稈を前記扱室57内で脱穀処理できるように構成されている。
【0015】
前記選別装置6は、前記脱穀装置5の下方に配置されて、前記機体フレーム2に設けられている。前記選別装置6は、図2及び図3に示すように、前記揺動選別装置200と、一番樋310と、二番樋320とを備えている。前記揺動選別装置200は、前記脱穀装置5から落下する脱穀物を揺動選別できるように構成されている。前記一番樋310及び前記二番樋320は、前記揺動選別装置200によって選別されたものを集約することができるように構成されている。
【0016】
前記穀粒貯留装置7は、前記脱穀装置5及び前記選別装置6の右側方に配置されて、前記機体フレーム2の右側部分に設けられている。前記穀粒貯溜装置7は、穀粒タンク26と、穀粒排出装置27とを備えている。前記穀粒タンク26は、前記選別装置6から搬送されてきた選別後の穀粒を貯留できるように構成されている。前記穀粒排出装置27は、前記穀粒タンク26内に貯留されている穀粒を外部へ排出できるように構成されている。
【0017】
前記排藁処理装置8は、前記脱穀装置5の後方に配置されている。前記排藁処理装置8は、排藁搬送装置31と、排藁切断装置32とを備えている。前記排藁搬送装置31は、前記脱穀装置5から搬送されてきた脱穀済みの穀稈(排藁)を受け継いで搬送し、外部へ排出できるように構成されている。前記排藁切断装置32は、前記排藁搬送装置31によって搬送されてきた排藁を外部へ排出する前に切断できるように構成されている。
【0018】
前記操縦部9は、前記穀粒貯留装置7の前方に配置されて、前記機体フレームの右前側部分に設けられている。前記操縦部9には、運転席36と、ステアリングハンドル37とを含む操作具が設けられている。前記操縦部9の下方には、動力源となるエンジンが設けられている。前記エンジンは前記機体フレーム2に支持されている。
【0019】
こうして、前記コンバイン1は、前記走行機体を前記走行装置3によって走行させながら、圃場の穀稈を前記刈取装置4によって刈り取り、刈取後の穀稈を前記脱穀装置5によって脱穀処理できるように構成されている。そして、前記コンバイン1は、前記脱穀処理により生じた脱穀物を前記選別装置6によって選別して、選別後の穀粒を前記穀粒貯溜装置7によって貯溜又は外部へ排出できるように、また脱穀処理により生じた排藁を前記排藁処理装置8によって外部へ排出できるように構成されている。
【0020】
次に、前記脱穀装置5についてより詳細に説明する。
【0021】
図2及び図3に示すように、前記脱穀装置5は、前記穀稈搬送機構17と、前記扱胴18と、穀稈を脱穀するための空間である前記扱室57とを備えている。
【0022】
前記扱室57には、前記扱胴18が配置され、穀稈が前記脱穀装置5の前方から穀稈導入口60を介して導入可能とされている。前記扱室57は、扱室カバー56を有するケーシング51によって形成されている。前記扱室カバー56は、前記扱胴18を上方から覆うように、前記扱室57の天井部分を構成している。
【0023】
前記扱胴18は、前記刈取装置4によって刈り取られた穀稈を脱穀処理するためのものである。前記扱胴18は、扱胴本体61と、この扱胴本体61から前記扱胴18の径方向外側に向かって突出する複数の扱歯62とを有している。
【0024】
前記扱胴本体61は、その長手方向を機体前後方向とする略八角柱状かつ中空状の筒体である。前記扱胴本体61は、その機体前後方向に延びる回転軸65を介して前記ケーシング51に回転可能に支持され、駆動力を前記エンジンから伝達されることによって前記回転軸65回りに(図3に示す矢印方向に)回転駆動するように構成されている。
【0025】
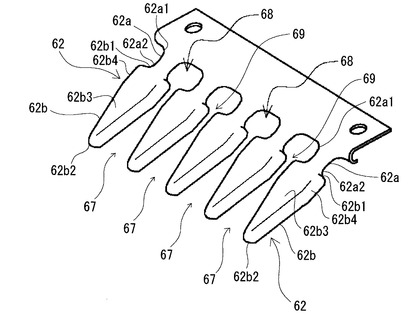
図4に、前記脱穀装置5における前記扱胴18の扱歯62の斜視図を示す。図4に示すように、前記複数の扱歯62は、それぞれ基端部62a1が前記扱胴本体61の外周面に直接又は間接的に連結された連結部62a、及び基端部62b1が前記連結部62aの先端部62a2と連結された状態で先端部62b2に向かうに従って先細状に形成された本体部62bを有している。そして、前記複数の扱歯62は、機体前後方向に関し隣接する扱歯62の前記連結部62aの間に抜き孔68が形成され且つ前記本体部62bの間に前記抜き孔68と連通するV型溝67が形成されるように、機体前後方向に所定間隔を存し且つ並列配置されている。
【0026】
本実施形態においては、前記扱歯62の本体部62bは、前記基端部62b1から前記先端部62b2までの所定幅の領域に前記連結部62aの先端部62a2よりも機体前後方向に張り出す張出部62b4を有している。これにより、前記隣接する扱歯62の本体部62b間に、前記V型溝67と、このV型溝67の最も狭くなっている部分を前記抜き孔68に連通させる連通溝69とが形成されている。また、前記隣接する扱歯62の連結部62a間に形成された前記抜き孔68は、前記連通溝69に比べて広い前後幅を有している。前記抜き孔68は、略四角形等の多角形又は丸型とされ得る。
【0027】
好ましくは、前記複数の扱歯62は、扁平状に形成されている。前記複数の扱歯62は、その扁平な面62b3が前記回転軸65の軸線方向に平行な平面に沿うように配置されている。前記各扱歯62は、前記回転軸65の軸線方向で見たとき、当該扱歯62の先端部(前記本体部62bの先端部62b2)が基端部(前記連結部62aの基端部62a1)よりも前記扱胴18の回転方向下流側に位置するように、前記扱胴18の外周面の法線に対して斜めに設けられている(図3参照)。
【0028】
図2及び図3に示すように、前記穀稈搬送装置17は、フィードチェン72と、押圧部材73とを有している。前記穀稈搬送装置17は、前記扱胴18の左側方に配置されて、前記扱室57外に設けられている。前記穀稈搬送装置17は、前記脱穀装置5が上扱ぎ式とされていることから、前記扱胴18の上端よりも低い位置で穀稈の株元部を前記フィードチェン72と前記押圧部材73とで挟持することができるように構成されている。
【0029】
前記フィードチェン72は、無端チェンであり、搬送面を上向きにして、前記扱胴18に沿って機体前後方向に延びるように設けられている。前記フィードチェン72は、駆動力を前記エンジンから伝達されることによって回転駆動するように構成されている。前記押圧部材73は、前記フィードチェン72に沿ってその上方に配置され、前記フィードチェン72の上面に対して押圧されるように設けられている。
【0030】
前記穀稈搬送装置17は、前記フィードチェン72の回転駆動によって、前記刈取装置4の搬送装置16の後端部に至った脱穀前の穀稈の株元部を前記フィードチェン72の前端部で受け継ぎ、つづいて穀稈の株元部を前記フィードチェン72と前記押圧部材73との間に位置させた状態で挟持しながら、前記扱胴18に沿って後ろ斜め上方へ搬送するように構成されている。
【0031】
本実施形態においては、前記脱穀装置5は処理胴19をさらに備えている。前記処理胴19は、前記扱胴18の脱穀処理よって発生した脱穀物の一部を再脱穀するとともに、前記選別装置6によって選別処理された選別物の一部を再脱穀するためのものである。前記処理胴19は、処理胴本体91及び複数の処理歯92を有している。
【0032】
前記処理胴本体91は、その長手方向を機体前後方向とする略四角筒状の筒体である。前記処理胴本体91は、その機体前後方向に延びる回転軸95を介して前記ケーシング51に回転可能に支持され、駆動力を前記エンジンから伝達されることによって前記回転軸95回りに(図3に示す矢印方向に)回転駆動するように構成されている。
【0033】
前記複数の処理歯92は、それぞれ棒状に形成されている。前記複数の処理歯92における各処理歯92は、その基端部で前記処理胴本体91の外周面に連結されるとともに、その先端部がこの外周面から最も離れるように、前記処理胴19の径方向外側に向かって突出されている。
【0034】
前記複数の処理歯92は、機体前後方向に所定間隔を存し且つ並列配置されている。前記各処理歯92は、前記回転軸95の軸線方向で見たとき、当該処理歯92の先端部92aが基端部92bよりも前記処理胴19の回転方向上流側に位置するように設けられている(図3参照)。
【0035】
また、受網98が、前記処理胴19の略下半分を覆うように、前記処理胴19の径方向外側に設けられている。前記処理胴19及び前記受網98は、脱穀処理が行われる際に前記扱胴18の回転方向下流側に向けて放出される脱穀物のうち主に穂切れ物が落下してくるように、前記扱胴18に沿って設けられ、前記扱胴18の下部の右側方に配置されている。
【0036】
前記脱穀装置5によって脱穀処理が行われる際には、穀稈の株元部は前記穀稈搬送装置17によって挟持されながら前記脱穀装置5の後方へ向かって搬送される。この搬送に伴って穀稈の穂先部は案内部材52によって案内されながら前記穀稈導入口60を通過し、前記扱室57内に至る。この穀稈の穂先部は、前記扱胴18に供給されると、まず前記複数の扱歯62うち隣接する扱歯62間に形成された前記V型溝67に嵌り込み、次に前記連通溝69を介して前記抜き孔68に嵌り込んで、前記扱胴18(前記扱胴本体61)の外周面に押し付けられるような姿勢になる。
【0037】
ここで、前記扱胴18が回転駆動していることから、このような姿勢をとった穀稈の穂先部が前記扱歯62によって株元側から穂先側へ向かって扱かれる。前記扱胴18に供給された穀稈は、このように穂先部を前記複数の扱歯62によって扱かれながら、株元部を前記穀稈搬送装置17によって後ろ斜め上方へ搬送される。その後、穂先部が扱かれた穀稈は、排藁として前記穀稈搬送装置17により前記扱室57外へ排出され、前記排藁搬送装置31に受け渡される。
【0038】
また、前記扱胴18の作用により生じた脱穀物の一部は前記脱穀装置5から落下し、前記選別装置6で選別される。また、穀稈から取られた穂の部分である穂切れ物を含む脱穀物が、前記扱胴18の回転方向下流側に向けて放出されて落下し、前記処理胴19で再脱穀される。穂切れ物の一部は、前記処理胴19の処理歯92と前記受網98との間で揉み解し作用を受け、穀粒を枝梗から外すように単粒化される。前記処理胴19による処理で生じた処理物は、前記脱穀装置5から落下し、前記選別装置6で選別される。
【0039】
次に、前記選別装置6についてより詳細に説明する。
【0040】
図2及び図3に示すように、前記選別装置6は、本実施形態に係る前記揺動選別装置200と、前記一番樋310と、前記二番樋320とを備えている。
【0041】
前記揺動選別装置200は、機体前後方向に揺動される揺動機枠201と、前記揺動機枠201に支持されたフィードパン202と、前記フィードパン202の後方側に隣接するように前記揺動機枠201に支持されたチャフシーブ機構203とを備えている。前記揺動選別装置200は、前記扱胴18を有する前記脱穀装置5から落下する脱穀物を揺動選別して、当該揺動選別装置32の下方において機体前後方向に順に配置された前記一番樋310及び前記二番樋320のそれぞれに振り分ける。
【0042】
前記揺動選別装置200は、前記扱胴18に臨むように前記脱穀装置5の下方に配置されて、前記扱室57と連通されている。
【0043】
前記揺動機枠201は、前記扱室57の下方に配置され、前記走行機体に機体前後方向に揺動可能に支持されている。そして、前記揺動機枠201は、揺動機構(図示せず)の回転軸が回転駆動されることにより、前記走行機体に対して機体前後方向に揺動するように構成されている。前記揺動機枠201は、その長手方向を機体前後方向とし且つ短手方向を機体幅方向とする枠状体である。前記揺動機枠201は、機体上方から見たとき略矩形状の枠状態体ができるように連結された前後及び左右の枠体を有している。
【0044】
前記フィードパン202は、前記脱穀装置5から落下してきた脱穀物を受け止め、そのあとに機体幅方向に分散させつつ前記チャフシーブ機構203へ向けて機体後方側へ搬送するように構成されている。前記フィードパン202は、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている。前記フィードパン202は、機体幅方向に関し前記揺動機枠201の略全域を覆い、且つ機体前後方向に関し前記扱胴18の下方に位置するように設けられている。好ましくは、前記フィードパン202は、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態に配置される。
【0045】
具体的には、前記フィードパン202は、フィードパン本体351と、複数のリード板352とを有している。前記フィードパン本体351は、その上を脱穀物が前記チャフシーブ機構203へ向かって後方側へ流れるように構成されている。前記フィードパン本体351は、前端部が前記扱胴18の前端部よりも前方側に位置し、後端部が前記扱胴18の後端部よりも前方側に配置されている。前記フィードパン本体351は、機体前後方向且つ機体幅方向に延びる板状体で構成されている。
【0046】
前記複数のリード板352は、前記脱穀装置5から前記フィードパン本体351上に落下してきた脱穀物を機体幅方向に関し左方側へ向かって導き分散させるように構成されている。複数のリード板352は、その長手方向の一端部が他端部よりも機体前方側且つ右方側に位置する傾斜状態で、機体幅方向に所定間隔を存しつつ並列配置されている。前記複数のリード板352は、その上端部が前記揺動機枠201の上端部と同程度の高さ位置となるように、前記フィードパン本体351から上方へ向かって立設されている。
【0047】
前記チャフシーブ機構203は、前記脱穀装置5から落下する脱穀物及び前記フィードパン202から送られてくる脱穀物に対して比重選別を行い、一番物(穀粒)を下方に位置する前記一番樋310に流下させるように構成されている。前記チャフシーブ機構203は、前記フィードパン202の後方側に隣接するように配置されている。前記チャフシーブ機構203は、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている。前記チャフシーブ機構203は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。
【0048】
具体的には、前記チャフシーブ機構203は、複数のフィン361を有し、比重選別される脱穀物が隣接するフィン361間を通って、当該チャフシーブ機構203の下方に配置される前記一番樋310へ落下するように構成されている。複数のフィン361は、機体幅方向に延びるように設けられ、機体前後方向に関し所定間隔を存しつつ機体前後方向に並列配置されている。前記複数のフィン361は、下端部が上端部よりも前方側に位置する後傾斜状態で、それぞれ機体幅方向に沿った枢支軸回りに一体的に揺動可能とされている。そして前記複数のフィン361のうち隣接するフィン361間の前記間隔(開口幅)が、駆動機構(図示せず)によって当該フィン361の傾斜角を変更することによって調整可能とされている。
【0049】
本実施形態においては、前記揺動選別装置200は、ストローラック機構204と、グレンシーブ機構205とをさらに備えている。
【0050】
前記ストローラック機構204は、前記チャフシーブ機構203から送られてくる脱穀物に対して比重選別を行い、この脱穀物のうち、穀粒よりも比重の軽い二番物(枝梗付き穀粒や穂切れ物等)を当該ストローラック機構204の下方に位置する前記二番樋320に流下させるとともに、脱穀物のうち排藁等を機外に送るように構成されている。前記ストローラック機構204は、前記チャフシーブ機構203の後方側に隣接するように配置されている。前記ストローラック機構204は、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている
【0051】
前記グレンシーブ機構205は、前記チャフシーブ機構203から流下する選別物をさらに精選するように構成されている。前記グレンシーブ機構205は、機体上下方向に関し前記チャフシーブ機構203と前記一番樋310との間に位置するように配置されて、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている。具体的には、前記グレンシーブ機構205は、複数(本実施形態においては2つ)の網状体で構成されている。これらの網状体は、上下方向に関し互いに所定間隔を隔て且つ重合された状態で配置されている。
【0052】
また、前記揺動選別装置200は粗選機構210をさらに備えている。
【0053】
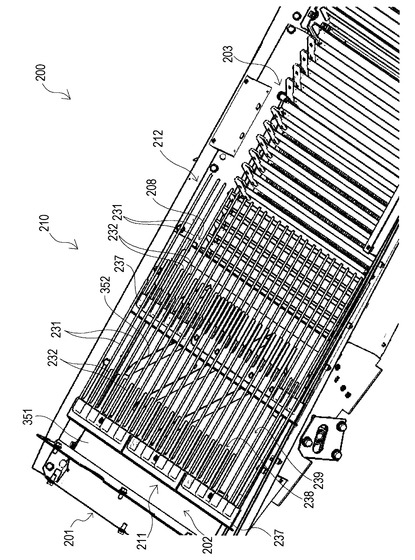
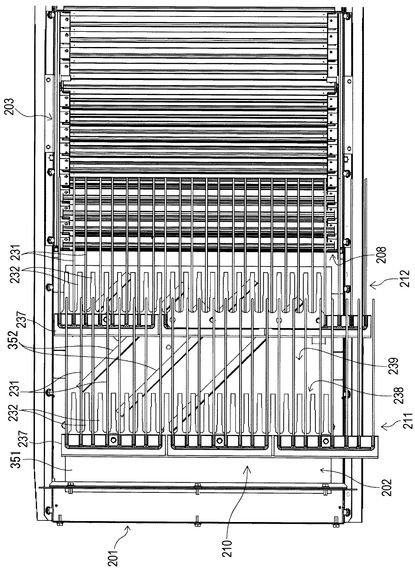
図5に、本実施形態に係る前記揺動選別装置200の前部付近の斜視図を示す。図6に、前記揺動選別装置200の前部付近の平面図を示す。図7に、前記揺動選別装置200の前部付近の一部拡大平面図を示す。図8に、前記揺動選別装置200の前部付近の側面断面図を示す。
【0054】
図2、図3、図5、図6、図7及び図8に示すように、前記粗選機構210は、前記フィードパン202及び前記チャフシーブ機構203よりも上方において機体幅方向に関し前記揺動機枠201の略全域を覆い且つ機体前後方向に関し前記フィードパン202及び前記チャフシーブ機構203の境界208を跨いた状態で前記揺動機枠201と一体的に揺動するように、前記揺動機枠201に直接又は間接的に支持されている。前記粗選機構210は、前記脱穀装置5から前記フィードパン202に向かって落下する脱穀物のうち所定の大きさより大きい脱穀物(穂切れ物等)の少なくとも一部を前記フィードパン202をバイパスさせて前記チャフシーブ機構203に送るように構成されている。
【0055】
このような粗選機構210を備える前記揺動選別装置200によれば、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記フィードパン202上に大きな穂切れ物が過度に落下することを前記粗選機構210によって有効に防止でき、前記フィードパン202上には主として前記所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、脱穀物を機体幅方向に分散させつつ後方へ搬送する前記フィードパン202の作用を良好に維持することができる。前記チャフシーブ機構203へ送られた所定の大きさより大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0056】
また、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記チャフシーブ機構203のうち前記フィードパン202に近接する前端部に当該フィードパン202から送られてくる穂切れ物及び前記脱穀装置5から直接落下してくる穂切れ物が集中することを前記粗選機構210によって有効に防止でき、前記チャフシーブ機構203の前端部には主として所定の前記大きさよりも小さい脱穀物のみを落下させることができる。したがって、前記チャフシーブ機構203の前端部における選別性能を良好に維持することができる。
【0057】
なお、前記所定の大きさより大きい脱穀物とは例えば一方向の幅が所定値以上の脱穀物であり、前記所定の大きさより小さい脱穀物とは例えば前記一方向の幅が所定値未満の脱穀物である。
【0058】
本実施形態においては、前記選別装置6は風選別装置250をさらに備えている。前記風選別装置250は、風選別を行うためのものである。前記風選別装置250は、前記揺動選別装置200に対して選別風を送出するように構成されており、前記選別風によって当該揺動選別装置200による穀粒の選別を促進させ得るようになっている。
【0059】
前記風選別装置250は、唐箕ファン251と吸引ファン252とを有している。前記唐箕ファン251は、機体幅方向に沿った駆動軸によって回転駆動されることによって、前記揺動選別装置200に対して前下方から後上方へ抜ける選別風を送出するように構成されている。前記唐箕ファン251は、前記チャフシーブ機構203の前方且つ下方に配置されている。
【0060】
前記吸引ファン252は、機体幅方向に沿った回転軸によって回転駆動されることによって、前記唐箕ファン251からの選別風を吸引して機外に排出させるように構成されている。前記吸引ファン252は、前記揺動選別装置200よりも上方且つ前記扱室57の後方(穀稈搬送方向下流側)に配置されている。
【0061】
前記一番樋310は、前記揺動選別装置200の下方に配設され、前記選別装置6によって選別処理された一番物を回収し得るように、側面視凹状とされている。本実施形態において、前記一番樋310は、機体幅方向に延びる前方側の傾斜板311と後方側の第1流穀板312とによって側面視凹状に形成されている。この第1流穀板312は、前記揺動機枠201と一体的に揺動するように、当該揺動機枠201に支持されている。前記一番樋310に回収された一番物は、一番搬送装置により搬送されて、前記穀粒タンク26に収容される。
【0062】
具体的には、前記一番搬送装置は、一番コンベア315と、揚穀コンベア316とを有している。前記一番コンベア315は、機体前後方向に関し前記前方側の傾斜板311と前記後方側の第1流穀板312との間に機体幅方向に延びるように配設されて、前記一番樋310内の一番物を前記一番樋310の機体幅方向一方側(右側)へ搬送できるように構成されている。前記揚穀コンベア316は、前記脱穀装置5の機体幅方向一方側(右側)において機体上下方向に延びるように配設されて、前記一番コンベア315によって搬送されてきた一番物を受け継ぎ、前記穀粒タンク26の上部へ搬送するように構成されている。
【0063】
前記穀粒搬送装置の二番樋320は、前記揺動選別装置200の下方且つ前記一番樋310の後方(穀稈搬送方向下流側)に配設され、前記揺動選別装置200及び前記風選別装置250によって選別処理された二番物を回収し得るように側面視凹状とされている。本実施形態において、前記二番樋320は、機体幅方向に延びる前方側の傾斜板321と後方側の傾斜板322及び第2流穀板323とによって側面視凹状に形成されている。この第2流穀板323は、前記揺動機枠201と一体的に揺動するように、当該揺動機枠201に支持されている。前記二番樋320に回収された二番物は、二番還元装置により搬送されて、前記処理胴19に供給され、再脱穀されたあとに再選別される。
【0064】
具体的には、前記二番還元装置は、二番コンベア325と、二番還元コンベア326とを有している。前記二番コンベア325は、機体前後方向に関し前記前方側の傾斜板321と前記後方側の傾斜板322との間に機体幅方向に延びるように配設されて、前記二番樋320内の二番物を前記二番樋320の機体幅方向一方側(右側)へ搬送できるように構成されている。前記二番還元コンベア326は、前記脱穀装置5の機体幅方向一方側(右側)において機体上下方向に延びるように配設されて、前記二番コンベア325によって搬送されてきた二番物を受け継ぎ、前記処理胴19に向けて搬送するように構成されている。
【0065】
好ましくは、実施形態1に係る前記揺動選別装置200の粗選機構210は次のように構成される。前記粗選機構210についてより詳細に説明する。
【0066】
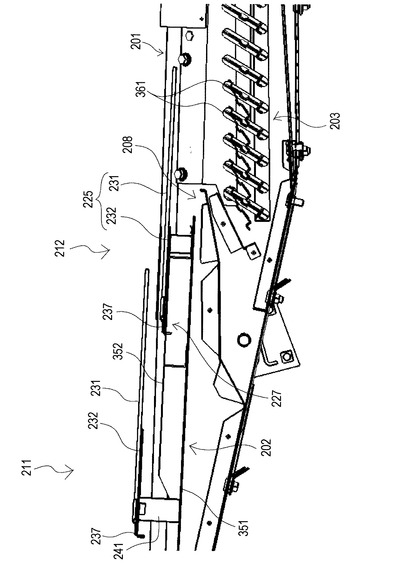
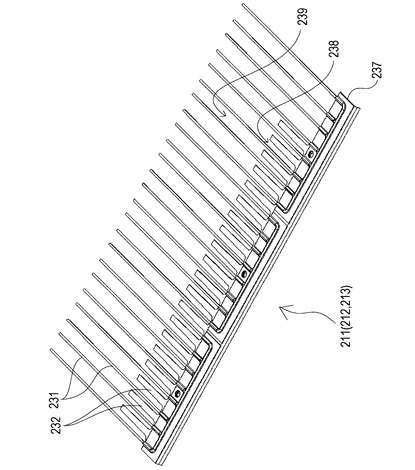
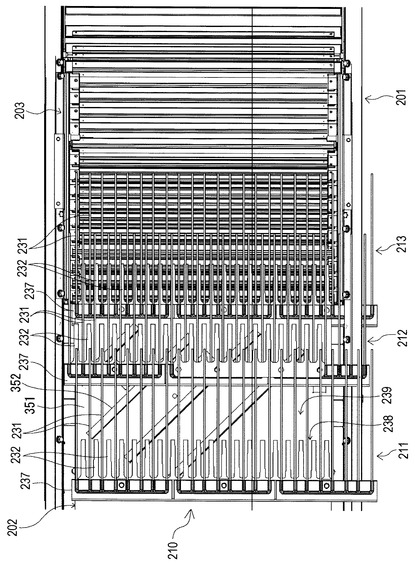
図5、図6、図7、図8に示すように、前記粗選機構210は、複数の粗選ユニット、ここでは第1粗選ユニット211及び第2粗選ユニット212を備えている。図9に、前記揺動選別装置200における前記粗選機構210の第1粗選ユニット211の斜視図を示す。本実施形態においては、前記第1粗選ユニット211と前記第2粗選ユニット212とは、実質的に互いに同一構成とされている。そのため、後述の説明においては前記第1粗選ユニット211と前記第2粗選ユニット212とにおいて対応する部材には同一符号を付し、前記第1粗選ユニット211の構成を中心に説明する。
【0067】
前記第1粗選ユニット211及び前記第2粗選ユニット212のそれぞれは、機体前後方向に延びる複数の梁231であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁231を有している。前記第1粗選ユニット211は、前端部が前記フィードパン202上に位置するように配置されている。前記第2粗選ユニット212は、上下方向に関し前記第1粗選ユニット211よりも下方に配置され、機体前後方向に関し前端部が前記第1粗選ユニット211の後端部と重合された状態で後端部が前記チャフシーブ機構203上に位置するように配置され、且つ、機体幅方向に関し前記第1粗選ユニット211の梁231が当該第2粗選ユニット212における隣接する複数の梁231の間の前記所定間隔内に位置するように配置されている。
【0068】
前記第1粗選ユニット211は、前記揺動機枠201に直接又は間接的に支持されている。前記第1粗選ユニット211は、前端部が前記フィードパン202、特にその前部上に位置するように配置されている。本実施形態においては、前記第1粗選ユニット211は、後端部が前記フィードパン202の後部上に位置するように配置されている。すなわち、前記第1粗選ユニット211は、前記フィードパン202上にのみ配置されている。
【0069】
好ましくは、前記第1粗選ユニット211は、機体側方から見たとき、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態で前記フィードパン202に沿って延びるように設けられる。
【0070】
前記複数の梁231は、前端部が支持部材237に直接又は間接的に支持され、後端部が自由端部とされている。前記複数の梁231は、それぞれ丸棒状体で構成されている。前記複数の梁231の長手方向の長さは略均一とされている。
【0071】
前記支持部材237は、前記複数の梁231を支持した状態で機体幅方向に延びるように設けられている。前記支持部材237は、前記フィードパン202から立設された一つ又は複数のステー241に支持されている。すなわち、本実施形態においては、前記第1粗選ユニット211は、前記フィードパン202を介して前記揺動機枠201に間接的に支持されている。
【0072】
また、前記第1粗選ユニット211は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。具体的には、前記第1粗選ユニット211は、前記複数の梁231のうち最も左側の梁231が前記揺動機枠201の左枠体近傍に位置し、前記複数の梁231のうち最も右側の梁231が前記揺動機枠201の右枠体近傍に位置するように配置されている。
【0073】
前記第2粗選ユニット212は、前記揺動機枠201に直接又は間接的に支持されている。本実施形態においては、前記第2粗選ユニット212は、前端部が前記フィードパン202の後部に位置し、後端部が前述のとおり前記チャフシーブ機構203上に位置し且つ前記一番樋310上に位置するように配置されている。
【0074】
本実施形態においては、前記第2粗選ユニット212は、前端部が前記第1粗選ユニット211の前端部よりも後方側且つ前記第1粗選ユニット211の後端部よりも前方側に位置し、後端部が前記第1粗選ユニット211の後端部よりも後方側で前記一番樋310の上方に位置するように配置されている。
【0075】
こうして、前記第2粗選ユニット212は、前記第1粗選ユニット211と前記フィードパン202との間から後方へ突出するように設けられている。言い換えれば、前記第1粗選ユニット211及び前記第2粗選ユニット212は、機体側方から見たとき、当該第1粗選ユニット211が上段となり前記第2粗選ユニット212が前記第1粗選ユニット211よりも後方で下段となる上下2段の階段状に配置されている。
【0076】
好ましくは、前記第2粗選ユニット212は、機体側方から見たとき、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態で前記第1粗選ユニット211と略平行に且つ前記フィードパン202に沿って延びるように設けられる。
【0077】
前記第2粗選ユニット212は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。具体的には、前記第2粗選ユニット212は、前記複数の梁231のうち最も左側の梁231が前記揺動機枠201の左枠体近傍に位置し、前記複数の梁231のうち最も右側の梁231が前記揺動機枠201の右枠体近傍に位置するように配置されている。
【0078】
このような第1粗選ユニット211及び第2粗選ユニット212を有する前記粗選機構210を備えた前記揺動選別装置200によって揺動選別が行われる際、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物は、前記フィードパン202に至る前に前記粗選機構210によって粗選される。
【0079】
具体的には、脱穀物が前記粗選機構210の前記第1粗選ユニット211又は前記第2粗選ユニット212に至ったとき、この脱穀物のうち前記所定の大きさよりも大きい脱穀物(穂切れ物等)の少なくとも一部は、前記第1粗選ユニット211においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、当該第1粗選ユニット211の後端部から落下して前記第2粗選ユニット212に至り、前記第2粗選ユニット212においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、前記第2粗選ユニット212の後端部から落下して前記チャフシーブ機構203に至る。こうして、前記脱穀物のうち前記所定の大きさよりも大きい脱穀物の少なくとも一部は、前記フィードパン202上に至らないように当該フィードパン202をバイパスして、前記チャフシーブ機構203に送られる。前記チャフシーブ機構203へ送られた前記所定の大きさよりも大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0080】
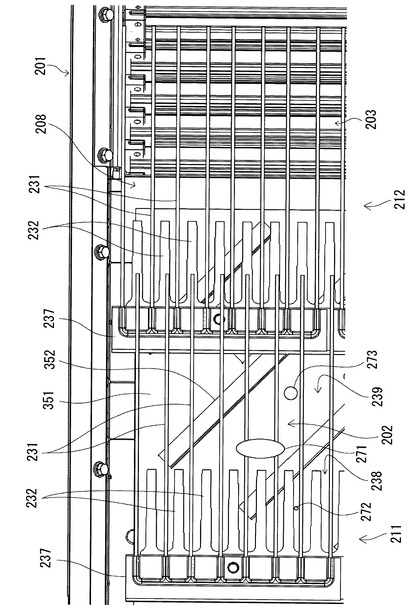
好ましくは、図5、図6、図7、図8、及び図9に示すように、前記第1粗選ユニット211及び前記第2粗選ユニット212の少なくとも一方は、機体前後方向に延びる複数の補助梁232であって、前記複数の梁231と比べて機体前後方向の長さが異なる複数の補助梁232を有する。それぞれの前記複数の補助梁232は、機体幅方向に関し前記複数の梁231のうち隣接する複数の梁231の間の所定間隔内に位置する。ここでは、前記各補助梁232は、機体幅方向に関し隣接する梁231双方から略等距離離れた状態とされている。
【0081】
本実施形態においては、前記第1粗選ユニット211及び前記第2粗選ユニット212は、機体前後方向(長手方向)の長さが異なる2種類の梁として前記複数の梁231と、これに比べて機体前後方向の長さが短い前記複数の補助梁232を有しているが、前記第1粗選ユニット211及び前記第2粗選ユニット212の少なくとも一方を穂切れ物の大きさ等に応じて、長手方向の長さが異なる3種類以上の梁を有するように構成することも可能である。
【0082】
前記第1粗選ユニット211及び前記第2粗選ユニット212においては、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存する部分では当該隣接する前記梁231と前記補助梁232との間に第1間隙238が形成され、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存しない部分では当該隣接する前記梁231間に機体幅方向に関し前記第1間隙238に比べて幅の広い第2間隙239が形成されている。
【0083】
これにより、図7に示すように、前記第1粗選ユニット211及び前記第2粗選ユニット212においては、機体幅方向に関し前記梁231と前記補助梁232が略重合する部分では、前記第1間隙238より大きい脱穀物271の前記フィードパン202上への落下が有効に防止又は低減される。そして、機体幅方向に関し前記梁231と前記補助梁232が重合しない部分では、前記第2間隙239より大きい脱穀物271の前記フィードパン202上への落下が有効に防止又は低減される。
【0084】
本実施形態においては、前記複数の補助梁232は、それぞれの前端部が前記支持部材237に直接又は間接的に支持され、それぞれの後端部が自由端部とされている。前記複数の補助梁232は、前記複数の梁231と略同一平面上に配置されている。前記複数の補助梁232はそれぞれ板状体で構成されている。前記複数の補助梁232の長手方向の長さは互いに略均一とされている。
【0085】
こうして、前記第1粗選ユニット211の前側に前記第1間隙238が形成され、後側に前記第2間隙239が形成されている。前記第2粗選ユニット212の前側に前記第1間隙238が形成され、後側に前記第2間隙239が形成されている。すなわち、前記フィードパン202及び前記チャフシーブ機構203の上方において、機体前後方向に順に前記第1粗選ユニット211の第1間隙238、前記第1粗選ユニット211の第2間隙239、前記第2粗選ユニット212の第1間隙238、前記第2粗選ユニット212の第2間隙239が配置されている。これにより、前記フィードパン202上への脱穀物の落下位置を当該脱穀物の大きさに応じて変え得るようになっている。
【0086】
具体的には、図7に示すように、前記第1間隙238より小さい脱穀物272(小脱穀物)は、機体前後方向に関しいずれの位置においても前記粗選機構210を通過して前記フィードパン202上へ落下する。前記第1間隙238よりは大きいが前記第2間隙239よりは小さい脱穀物273(中脱穀物)は、機体前後方向に関し前記補助梁232が位置する領域においては前記粗選機構210を通過せず且つ前記梁231が位置する部分のうち前記補助梁232が位置しない領域において前記粗選機構210を通過する。即ち、本実施形態においては、前記中脱穀物は、主として、前記第1粗選ユニット211の前記補助梁232の後端部と前記第2粗選ユニット212の前端部との間の領域、並びに、前記第2粗選ユニット212の前記補助梁232の後端部より後方側の領域において、前記粗選機構210を通過する。そして、前記第2間隔239より大きい脱穀物271(大脱穀物)は、機体前後方向の全域において前記粗選機構210を通過し難くなっており、前記フィードパン202をバイパスして前記チャフシーブ機構203へ有効に移送される。
【0087】
ここで、前記第2粗選ユニット212の複数の補助梁232は、前記第1粗選ユニット211の梁231と重合した状態に配置されている。そして、前記第2粗選ユニット212の複数の補助梁232は、後端部が前記第1粗選ユニット211の複数の梁231の後端部よりも後方側に位置し且つ前記フィードパン202の後端部よりも前方側に位置するように配置されている。
【0088】
なお、本実施形態においては、前記粗選機構210が二つの粗選ユニット(前記第1粗選ユニット211及び前記第2粗選ユニット212)を備える場合を例に説明したが、本発明に係る揺動選別装置の粗選機構は、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパン202をバイパスさせて前記チャフシーブ機構203に送ることができるものであればよく、例えば単一の粗選ユニット(前記第2粗選ユニット212)のみを備えるものであってもよい。
【0089】
[実施形態2]
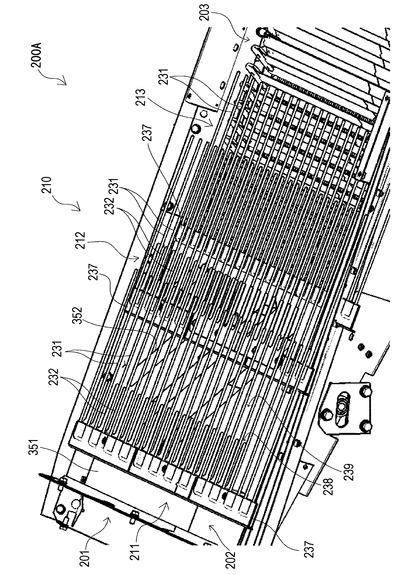
次に、実施形態2に係る揺動選別装置200Aについて説明する。ただし、本実施形態は、前記実施形態1に係る揺動選別装置200に補助粗選ユニット213をさらに備えた以外は該実施形態1と実質的に同じ構成をしており、同様の構成をとる部分については説明を省略する。
【0090】
なお、本実施形態においては、前記補助粗選ユニット213は、前記第1粗選ユニット211及び前記第2粗選ユニット212と実質的に同一構成とされている。そのため、後述の説明においては前記補助粗選ユニット213と前記第1粗選ユニット211及び前記第2粗選ユニット212とで対応する部材には、同一符号を付す。
【0091】
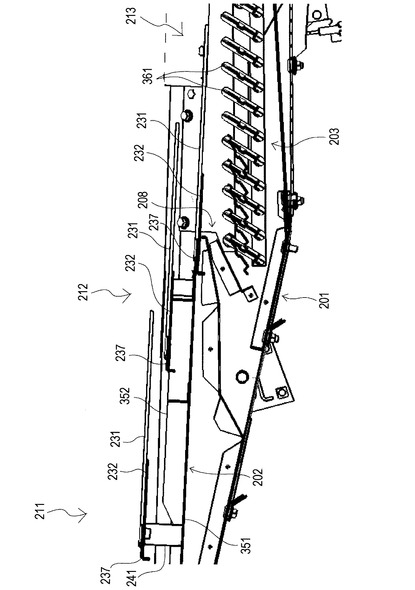
図10に、前記コンバイン1における脱穀装置5、及び本実施形態に係る前記揺動選別装置200Aを備えた選別装置6の概略側面断面図を示す。図11に、前記揺動選別装置200Aの前部付近の斜視図を示す。図12に、前記揺動選別装置200Aの前部付近の平面図を示す。図13に、前記揺動選別装置200Aの前部付近の一部拡大平面図を示す。図14に、前記揺動選別装置200Aの前部付近の側面断面図を示す。
【0092】
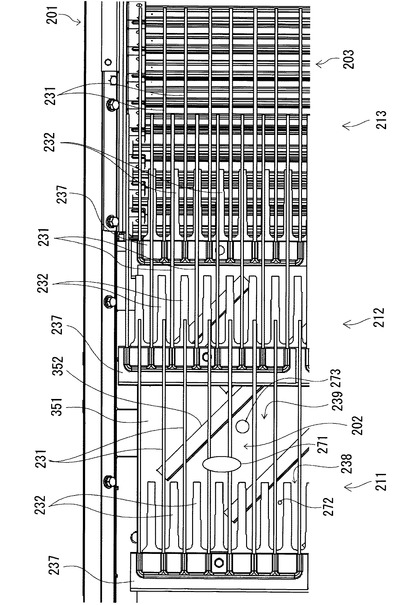
図10、図11、図12、図13、及び図14に示すように、前記補助粗選ユニット213は、機体前後方向に延びる複数の梁231であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁231を有している。前記補助粗選ユニット213は、前端部が前記フィードパン202の後端部に連結され且つ後端部が前記第2粗選ユニット212より後方側で前記チャフシーブ機構203上に位置している。
【0093】
本実施形態において、前記補助粗選ユニット213は、上下方向に関し前記第2粗選ユニット212よりも下方に配置され、機体前後方向に関し前部が前記第2粗選ユニット212の後部と重合された状態に配置され、且つ、機体幅方向に関し前記第2粗選ユニット212の梁231が当該補助粗選ユニット213における隣接する複数の梁231の間の前記所定間隔内に位置するように配置されている。
【0094】
前記補助粗選ユニット213は、前端部が前記第2粗選ユニット212の前端部よりも後方側且つ前記第2粗選ユニット212の後端部よりも前方側に位置し、後端部が前記第2粗選ユニット212の後端部よりも後方側に位置するように配置されている。ここでは特に前記補助粗選ユニット213は、後端部が前記第1流穀板312上に位置するように配置されている。
【0095】
こうして、前記補助粗選ユニット213は、前記第2粗選ユニット212の下方で前記フィードパン202の後端部から後方へ突出するように設けられている。言い換えれば、前記第2粗選ユニット212及び前記補助粗選ユニット213は、機体側方から見たとき、当該第2粗選ユニット212が上段となり前記補助粗選ユニット213が前記第2粗選ユニット212よりも後方で下段となる上下2段の階段状に配置されている。
【0096】
本実施形態においては、前述のとおり前記第1粗選ユニット211及び前記第2粗選ユニット212が上下2段の階段状に配置されていることから、前記第1粗選ユニット211、前記第2粗選ユニット212及び前記補助粗選ユニット213は、機体側方から見たとき、前記第1粗選ユニット211が最も上段となり、前記補助粗選ユニット213が最も下段となり、前記第2粗選ユニット212が前記第1粗選ユニット211と前記補助粗選ユニット213との間に位置する上下3段の階段状に配置されている。
【0097】
好ましくは、前記補助粗選ユニット213は、機体側方から見たとき、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態で前記第2粗選ユニット212と前記第2粗選ユニット212と略平行に延びるように設けられる。前記補助粗選ユニット213は、その上面が前記フィードパン202の上面と略同一平面上に位置するように配置されている。
【0098】
前記補助粗選ユニット213は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。具体的には、前記補助粗選ユニット213は、複数の梁231のうち最も左側の梁231が前記揺動機枠201の左枠体近傍に位置し、前記複数の梁231のうち最も右側の梁231が前記揺動機枠201の右枠体近傍に位置するように配置されている。
【0099】
このような補助粗選ユニット213を備えた前記揺動選別装置200Aによって揺動選別が行われる際、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物は、前記フィードパン202に至る前に前記粗選機構210によって粗選される。
【0100】
具体的には、脱穀物が前記粗選機構210の前記第1粗選ユニット211若しくは前記第2粗選ユニット212、又は前記補助粗選ユニット213に至ったとき、この脱穀物のうち前記所定の大きさよりも大きい脱穀物(穂切れ物等)の少なくとも一部は、前記第1粗選ユニット211においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、当該第1粗選ユニット211の後端部から落下して前記第2粗選ユニット212に至り、前記第2粗選ユニット212においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、前記第2粗選ユニット212の後端部から落下して前記補助粗選ユニット213に至る。前記所定の大きさよりも大きい脱穀物の少なくとも一部は、前記補助粗選ユニット213においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、前記補助粗選ユニット213の後端部から落下して前記チャフシーブ機構203に至る。こうして、前記所定の大きさよりも大きい脱穀物の少なくとも一部は、前記フィードパン202上に至らないように当該フィードパン202をバイパスして、前記第1流穀板312上で前記チャフシーブ機構203に送られる。前記チャフシーブ機構203へ送られた前記所定の大きさよりも大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0101】
このような前記揺動選別装置200Aによれば、実施形態1に係る前記揺動選別装置200と同様に、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記フィードパン202上に大きな穂切れ物が過度に落下することを前記粗選機構210によって有効に防止でき、前記フィードパン202上には主として所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、脱穀物を機体幅方向に分散させつつ後方へ搬送する前記フィードパン202の作用を良好に維持することができる。前記チャフシーブ機構203へ送られた所定の大きさより大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0102】
また、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記チャフシーブ機構203のうち前記フィードパン202に近接する前端部に前記フィードパン202から送られてくる穂切れ物及び前記脱穀装置5から直接落下してくる穂切れ物が集中することを前記粗選機構210によって有効に防止でき、前記チャフシーブ機構203の前端部には主として所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、前記チャフシーブ機構203の前端部における選別性能をさらに良好に維持することができる。
【0103】
好ましくは、図11、図12、図13、及び図14に示すように、前記補助粗選ユニット213は、機体前後方向に延びる複数の補助梁232であって、前記複数の梁231と比べて機体前後方向の長さが異なる複数の補助梁232を有する。それぞれの前記複数の補助梁232は、機体幅方向に関し前記複数の梁231のうち隣接する複数の梁231の間の所定間隔内に位置する。ここでは、前記各補助梁232は、機体幅方向に関し隣接する梁231双方から略等距離離れた状態とされている。
【0104】
本実施形態においては、前記補助粗選ユニット213は、機体前後方向(長手方向)の長さが異なる2種類の梁として前記複数の梁231と、これに比べて機体前後方向の長さが短い前記複数の補助梁232を有しているが、穂切れ物の大きさ等に応じて、長手方向の長さが異なる3種類以上の梁を有するように構成することも可能である。
【0105】
前記補助粗選ユニット213においては、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存する部分では当該隣接する前記梁231と前記補助梁232との間に第1間隙238が形成され、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存しない部分では当該隣接する前記梁231間に機体幅方向に関し前記第1間隙に比べて幅の広い第2間隙239が形成されている。
【0106】
これにより、図13に示すように、前記補助粗選ユニット213において、機体幅方向に関し前記梁231と前記補助梁232とが略重合する部分では、前記第1間隙238より大きい脱穀物271の前記チャフシーブ機構203上への落下が有効に防止又は低減される。そして、機体幅方向に関し前記梁231と前記補助梁232が重合しない部分では、前記第2間隙239より大きい脱穀物271の前記チャフシーブ機構203上への落下が有効に防止又は低減される。
【0107】
本実施形態においては、前記複数の補助梁232は、それぞれの前端部が支持部材237に直接又は間接的に支持され、それぞれの後端部が自由端部とされている。前記複数の補助梁232は、前記複数の梁231と略同一平面上に配置されている。前記複数の補助梁232はそれぞれ板状体で構成されている。前記複数の補助梁232の長手方向の長さは互いに略均一とされている。
【0108】
こうして、前記補助粗選ユニット213の前側に前記第1間隙238が形成され、後側に前記第2間隙239が形成されている。すなわち、前記チャフシーブ機構203、特にその前部上において、機体前後方向に順に前記補助粗選ユニット213の第1間隙238、前記補助粗選ユニット213の第2間隙239が配置されている。これにより、前記チャフシーブ機構203上への脱穀物の落下位置を当該脱穀物の大きさに応じて変え得るようになっている。
【0109】
具体的には、図13に示すように、前記第1間隙238より小さい脱穀物272(小脱穀物)は、機体前後方向に関しいずれの位置においても前記粗選機構210及び前記補助粗選ユニット213を通過して前記フィードパン202又は前記チャフシーブ機構203上へ落下する。前記第1間隙238よりは大きいが前記第2間隙239よりは小さい脱穀物273(中脱穀物)は、機体前後方向に関し前記補助梁232が位置する領域においては前記粗選機構210を通過せず且つ前記梁231が位置する部分のうち前記補助梁232が位置しない領域において前記粗選機構210を通過する。即ち、本実施形態においては、前記中脱穀物は、主として、前記第1粗選ユニット211の前記補助梁232の後端部と前記第2粗選ユニット212の前端部との間の領域、前記第2粗選ユニット212の前記補助梁232の後端部と前記補助粗選ユニット213の前端部との間の領域、及び、前記補助粗選ユニット213の前記補助梁232の後端部より後方側の領域において、前記粗選機構210を通過する。そして、前記第2間隔239より大きい脱穀物271(大脱穀物)は、機体前後方向の全域において前記粗選機構210を通過し難くなっており、前記フィードパン202をバイパスして前記チャフシーブ機構203へ有効に移送される。また、前記大脱穀物は、機体前後方向の全域において前記補助粗選ユニット213を通過し難くなっており、前記チャフシーブ機構203の前端部をバイパスして当該チャフシーブ機構203の後方側へ有効に移送される。
【0110】
ここで、前記補助粗選ユニット213の複数の補助梁232は、前記第2粗選ユニット212の梁231と重合した状態に配置されている。そして、前記補助粗選ユニット213の複数の補助梁232は、その後端部が前記第2粗選ユニット212の複数の梁231の後端部よりも前方側に位置するように配置されている。
【0111】
なお、本発明に係る揺動選別装置の粗選機構の粗選ユニット及び補助粗選ユニットは、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物のうち前記所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパン202をバイパスさせることができるものであればよく、その構成は特に限定するものではない。例えば、前記各実施形態においては複数の梁を備える構成としているが、これに代えてスリットが形成されたプレートを備える構成とすることも可能である。
【符号の説明】
【0112】
5 脱穀装置
18 扱胴
200 揺動選別装置
201 揺動機枠
202 フィードパン
203 チャフシーブ機構
208 境界
210 粗選機構
211 第1粗選ユニット
212 第2粗選ユニット
213 補助粗選ユニット
231 梁
310 一番樋
320 二番樋
【技術分野】
【0001】
本発明は、コンバインに適用する揺動選別装置に関する。
【背景技術】
【0002】
穀稈搬送装置によって搬送される穀稈に対して脱穀処理を行う脱穀装置と、前記脱穀装置によって脱穀された脱穀物のうち一番物及び二番物をそれぞれ集約するように機体幅方向に沿って並列配置された一番樋及び二番樋とを備えたコンバインに、機体前後方向に一体的に揺動するフィードパン及びチャフシーブ機構を備えた揺動選別装置を適用することは従来から公知である(例えば、下記特許文献1参照)。
【0003】
このようなコンバインにおいては、比較的大きい穂切れ物等を多く含む脱穀物が前記脱穀装置から揺動選別装置に大量に落下する場合、当該揺動選別装置の選別機能が損なわれる。具体的には、例えば前記フィードパンにおいては、落下してきた穂切れ物によって脱穀物全体の流れが悪くなって、脱穀物を機体幅方向に分散させつつ後方へ搬送するという当該フィードパンの作用が損なわれる。そして、前記フィードパンの後方側に隣接する前記チャフシーブ機構においては、前記フィードパンに近接する前端部に前記フィードパンから送られてくる穂切れ物及び前記脱穀装置から直接落下してくる穂切れ物が集中して、この前端部における当該チャフシーブ機構の選別性能が損なわれる。特に前記脱穀装置に受網が備えられていない場合、この問題は顕著となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−074984号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、斯かる従来技術に鑑みなされたものであり、脱穀物を機体幅方向に分散させつつ後方へ搬送するフィードパンの作用を良好に維持することができる揺動選別装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、前記目的を達成するために、機体前後方向に揺動される揺動機枠と、前記揺動機枠に支持されたフィードパンと、前記フィードパンの後方側に隣接するように前記揺動機枠に支持されたチャフシーブ機構とを備えた揺動選別装置であって、扱胴を有する脱穀装置から落下する脱穀物を揺動選別して、当該揺動選別装置の下方において機体前後方向に順に配置された一番樋及び二番樋に振り分ける揺動選別装置において、前記フィードパン及び前記チャフシーブ機構よりも上方において機体幅方向に関し前記揺動機枠の略全域を覆い且つ機体前後方向に関し前記フィードパン及び前記チャフシーブ機構の境界を跨いた状態で前記揺動機枠と一体的に揺動するように前記揺動機枠に直接又は間接的に支持された粗選機構を備え、前記粗選機構は、前記脱穀装置から前記フィードパンに向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパンをバイパスさせて前記チャフシーブ機構に送るように構成されている揺動選別装置を提供する。
【発明の効果】
【0007】
本発明に係る揺動選別装置によれば、前記脱穀装置から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記フィードパン上に大きな穂切れ物が過度に落下することを前記粗選機構によって有効に防止でき、前記フィードパン上には主として所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、脱穀物を機体幅方向に分散させつつ後方へ搬送する前記フィードパンの作用を良好に維持することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態に係る揺動選別装置が適用されたコンバインの左側面図。
【図2】前記コンバインにおける脱穀装置、及び本発明の実施形態1に係る揺動選別装置を備えた選別装置の概略側面断面図。
【図3】前記脱穀装置及び前記選別装置の前端部付近の概略正面断面図。
【図4】前記脱穀装置における扱胴の扱歯の斜視図。
【図5】本発明の実施形態1に係る揺動選別装置の前部付近の斜視図。
【図6】本発明の実施形態1に係る前記揺動選別装置の前部付近の平面図。
【図7】本発明の実施形態1に係る前記揺動選別装置の前部付近の一部拡大平面図。
【図8】本発明の実施形態1に係る前記揺動選別装置の前部付近の側面断面図。
【図9】前記揺動選別装置における粗選機構の粗選ユニットの斜視図。
【図10】前記コンバインにおける脱穀装置、及び本発明の実施形態2に係る揺動選別装置を備えた選別装置の概略側面断面図。
【図11】本発明の実施形態2に係る揺動選別装置の前部付近の斜視図。
【図12】本発明の実施形態2に係る前記揺動選別装置の前部付近の平面図。
【図13】本発明の実施形態2に係る前記揺動選別装置の前部付近の一部拡大平面図。
【図14】本発明の実施形態2に係る前記揺動選別装置の前部付近の側面断面図。
【発明を実施するための形態】
【0009】
本発明に係る揺動選別装置の好ましい実施形態を、図面を参照しつつ説明する。図面において、同一の引用符号は、対応する又は同一の要素を示す。
【0010】
[実施形態1]
まず、本実施形態に係る揺動選別装置200が適用されたコンバイン1の全体的な構成について説明する。
【0011】
図1に、本実施形態に係る前記揺動選別装置200が適用された前記コンバイン1の左側面図を示す。図2に、前記コンバイン1における脱穀装置5、及び本実施形態に係る揺動選別装置200を備えた選別装置6の概略側面断面図を示す。図1及び図2に示すように、前記コンバイン1は、機体フレーム2を含む走行機体と、走行装置3と、刈取装置4と、前記脱穀装置5と、前記選別装置6と、穀粒貯溜装置7と、排藁処理装置8と、操縦部9とを備えている。なお、前記コンバイン1の機体前後方向を機体長手方向とし、機体左右方向を機体幅方向とする。
【0012】
前記走行装置3は、前記走行機体の下方に配置されている。前記走行装置3は、左右一対のクローラ12を備えている。この左右一対のクローラ12は、前記機体フレーム2に連結されている。
【0013】
前記刈取装置4は、前記走行機体の前方に配置されて、前記機体フレーム2に昇降可能に連結されている。前記刈取装置4は、分草具13と、引起装置14と、切断装置15、搬送装置16とを備えている。前記分草具13は、圃場の穀稈を分草できるように構成されている。前記引起装置14は、分草された穀稈を引き起こすことができるように構成されている。前記切断装置15は、引き起こされた穀稈を切断することができるように構成されている。前記搬送装置16は、切断後の穀稈を前記脱穀装置5に搬送できるように構成されている。
【0014】
前記脱穀装置5は、前記刈取装置4の後方に配置されて、前記走行機体の左側部分に設けられている。図3に、前記脱穀装置5及び前記選別装置6の前端部付近の概略正面断面図を示す。図2及び図3に示すように、前記脱穀装置5は、穀稈搬送装置17と、扱胴18と、扱室57とを備えている。前記穀稈搬送機構17は、前記刈取装置4から搬送されてきた刈取後の穀稈の穂先部を前記扱室57内に導入しながら当該穀稈を後方へ搬送できるように構成されている。前記扱胴18は、搬送中の穀稈を前記扱室57内で脱穀処理できるように構成されている。
【0015】
前記選別装置6は、前記脱穀装置5の下方に配置されて、前記機体フレーム2に設けられている。前記選別装置6は、図2及び図3に示すように、前記揺動選別装置200と、一番樋310と、二番樋320とを備えている。前記揺動選別装置200は、前記脱穀装置5から落下する脱穀物を揺動選別できるように構成されている。前記一番樋310及び前記二番樋320は、前記揺動選別装置200によって選別されたものを集約することができるように構成されている。
【0016】
前記穀粒貯留装置7は、前記脱穀装置5及び前記選別装置6の右側方に配置されて、前記機体フレーム2の右側部分に設けられている。前記穀粒貯溜装置7は、穀粒タンク26と、穀粒排出装置27とを備えている。前記穀粒タンク26は、前記選別装置6から搬送されてきた選別後の穀粒を貯留できるように構成されている。前記穀粒排出装置27は、前記穀粒タンク26内に貯留されている穀粒を外部へ排出できるように構成されている。
【0017】
前記排藁処理装置8は、前記脱穀装置5の後方に配置されている。前記排藁処理装置8は、排藁搬送装置31と、排藁切断装置32とを備えている。前記排藁搬送装置31は、前記脱穀装置5から搬送されてきた脱穀済みの穀稈(排藁)を受け継いで搬送し、外部へ排出できるように構成されている。前記排藁切断装置32は、前記排藁搬送装置31によって搬送されてきた排藁を外部へ排出する前に切断できるように構成されている。
【0018】
前記操縦部9は、前記穀粒貯留装置7の前方に配置されて、前記機体フレームの右前側部分に設けられている。前記操縦部9には、運転席36と、ステアリングハンドル37とを含む操作具が設けられている。前記操縦部9の下方には、動力源となるエンジンが設けられている。前記エンジンは前記機体フレーム2に支持されている。
【0019】
こうして、前記コンバイン1は、前記走行機体を前記走行装置3によって走行させながら、圃場の穀稈を前記刈取装置4によって刈り取り、刈取後の穀稈を前記脱穀装置5によって脱穀処理できるように構成されている。そして、前記コンバイン1は、前記脱穀処理により生じた脱穀物を前記選別装置6によって選別して、選別後の穀粒を前記穀粒貯溜装置7によって貯溜又は外部へ排出できるように、また脱穀処理により生じた排藁を前記排藁処理装置8によって外部へ排出できるように構成されている。
【0020】
次に、前記脱穀装置5についてより詳細に説明する。
【0021】
図2及び図3に示すように、前記脱穀装置5は、前記穀稈搬送機構17と、前記扱胴18と、穀稈を脱穀するための空間である前記扱室57とを備えている。
【0022】
前記扱室57には、前記扱胴18が配置され、穀稈が前記脱穀装置5の前方から穀稈導入口60を介して導入可能とされている。前記扱室57は、扱室カバー56を有するケーシング51によって形成されている。前記扱室カバー56は、前記扱胴18を上方から覆うように、前記扱室57の天井部分を構成している。
【0023】
前記扱胴18は、前記刈取装置4によって刈り取られた穀稈を脱穀処理するためのものである。前記扱胴18は、扱胴本体61と、この扱胴本体61から前記扱胴18の径方向外側に向かって突出する複数の扱歯62とを有している。
【0024】
前記扱胴本体61は、その長手方向を機体前後方向とする略八角柱状かつ中空状の筒体である。前記扱胴本体61は、その機体前後方向に延びる回転軸65を介して前記ケーシング51に回転可能に支持され、駆動力を前記エンジンから伝達されることによって前記回転軸65回りに(図3に示す矢印方向に)回転駆動するように構成されている。
【0025】
図4に、前記脱穀装置5における前記扱胴18の扱歯62の斜視図を示す。図4に示すように、前記複数の扱歯62は、それぞれ基端部62a1が前記扱胴本体61の外周面に直接又は間接的に連結された連結部62a、及び基端部62b1が前記連結部62aの先端部62a2と連結された状態で先端部62b2に向かうに従って先細状に形成された本体部62bを有している。そして、前記複数の扱歯62は、機体前後方向に関し隣接する扱歯62の前記連結部62aの間に抜き孔68が形成され且つ前記本体部62bの間に前記抜き孔68と連通するV型溝67が形成されるように、機体前後方向に所定間隔を存し且つ並列配置されている。
【0026】
本実施形態においては、前記扱歯62の本体部62bは、前記基端部62b1から前記先端部62b2までの所定幅の領域に前記連結部62aの先端部62a2よりも機体前後方向に張り出す張出部62b4を有している。これにより、前記隣接する扱歯62の本体部62b間に、前記V型溝67と、このV型溝67の最も狭くなっている部分を前記抜き孔68に連通させる連通溝69とが形成されている。また、前記隣接する扱歯62の連結部62a間に形成された前記抜き孔68は、前記連通溝69に比べて広い前後幅を有している。前記抜き孔68は、略四角形等の多角形又は丸型とされ得る。
【0027】
好ましくは、前記複数の扱歯62は、扁平状に形成されている。前記複数の扱歯62は、その扁平な面62b3が前記回転軸65の軸線方向に平行な平面に沿うように配置されている。前記各扱歯62は、前記回転軸65の軸線方向で見たとき、当該扱歯62の先端部(前記本体部62bの先端部62b2)が基端部(前記連結部62aの基端部62a1)よりも前記扱胴18の回転方向下流側に位置するように、前記扱胴18の外周面の法線に対して斜めに設けられている(図3参照)。
【0028】
図2及び図3に示すように、前記穀稈搬送装置17は、フィードチェン72と、押圧部材73とを有している。前記穀稈搬送装置17は、前記扱胴18の左側方に配置されて、前記扱室57外に設けられている。前記穀稈搬送装置17は、前記脱穀装置5が上扱ぎ式とされていることから、前記扱胴18の上端よりも低い位置で穀稈の株元部を前記フィードチェン72と前記押圧部材73とで挟持することができるように構成されている。
【0029】
前記フィードチェン72は、無端チェンであり、搬送面を上向きにして、前記扱胴18に沿って機体前後方向に延びるように設けられている。前記フィードチェン72は、駆動力を前記エンジンから伝達されることによって回転駆動するように構成されている。前記押圧部材73は、前記フィードチェン72に沿ってその上方に配置され、前記フィードチェン72の上面に対して押圧されるように設けられている。
【0030】
前記穀稈搬送装置17は、前記フィードチェン72の回転駆動によって、前記刈取装置4の搬送装置16の後端部に至った脱穀前の穀稈の株元部を前記フィードチェン72の前端部で受け継ぎ、つづいて穀稈の株元部を前記フィードチェン72と前記押圧部材73との間に位置させた状態で挟持しながら、前記扱胴18に沿って後ろ斜め上方へ搬送するように構成されている。
【0031】
本実施形態においては、前記脱穀装置5は処理胴19をさらに備えている。前記処理胴19は、前記扱胴18の脱穀処理よって発生した脱穀物の一部を再脱穀するとともに、前記選別装置6によって選別処理された選別物の一部を再脱穀するためのものである。前記処理胴19は、処理胴本体91及び複数の処理歯92を有している。
【0032】
前記処理胴本体91は、その長手方向を機体前後方向とする略四角筒状の筒体である。前記処理胴本体91は、その機体前後方向に延びる回転軸95を介して前記ケーシング51に回転可能に支持され、駆動力を前記エンジンから伝達されることによって前記回転軸95回りに(図3に示す矢印方向に)回転駆動するように構成されている。
【0033】
前記複数の処理歯92は、それぞれ棒状に形成されている。前記複数の処理歯92における各処理歯92は、その基端部で前記処理胴本体91の外周面に連結されるとともに、その先端部がこの外周面から最も離れるように、前記処理胴19の径方向外側に向かって突出されている。
【0034】
前記複数の処理歯92は、機体前後方向に所定間隔を存し且つ並列配置されている。前記各処理歯92は、前記回転軸95の軸線方向で見たとき、当該処理歯92の先端部92aが基端部92bよりも前記処理胴19の回転方向上流側に位置するように設けられている(図3参照)。
【0035】
また、受網98が、前記処理胴19の略下半分を覆うように、前記処理胴19の径方向外側に設けられている。前記処理胴19及び前記受網98は、脱穀処理が行われる際に前記扱胴18の回転方向下流側に向けて放出される脱穀物のうち主に穂切れ物が落下してくるように、前記扱胴18に沿って設けられ、前記扱胴18の下部の右側方に配置されている。
【0036】
前記脱穀装置5によって脱穀処理が行われる際には、穀稈の株元部は前記穀稈搬送装置17によって挟持されながら前記脱穀装置5の後方へ向かって搬送される。この搬送に伴って穀稈の穂先部は案内部材52によって案内されながら前記穀稈導入口60を通過し、前記扱室57内に至る。この穀稈の穂先部は、前記扱胴18に供給されると、まず前記複数の扱歯62うち隣接する扱歯62間に形成された前記V型溝67に嵌り込み、次に前記連通溝69を介して前記抜き孔68に嵌り込んで、前記扱胴18(前記扱胴本体61)の外周面に押し付けられるような姿勢になる。
【0037】
ここで、前記扱胴18が回転駆動していることから、このような姿勢をとった穀稈の穂先部が前記扱歯62によって株元側から穂先側へ向かって扱かれる。前記扱胴18に供給された穀稈は、このように穂先部を前記複数の扱歯62によって扱かれながら、株元部を前記穀稈搬送装置17によって後ろ斜め上方へ搬送される。その後、穂先部が扱かれた穀稈は、排藁として前記穀稈搬送装置17により前記扱室57外へ排出され、前記排藁搬送装置31に受け渡される。
【0038】
また、前記扱胴18の作用により生じた脱穀物の一部は前記脱穀装置5から落下し、前記選別装置6で選別される。また、穀稈から取られた穂の部分である穂切れ物を含む脱穀物が、前記扱胴18の回転方向下流側に向けて放出されて落下し、前記処理胴19で再脱穀される。穂切れ物の一部は、前記処理胴19の処理歯92と前記受網98との間で揉み解し作用を受け、穀粒を枝梗から外すように単粒化される。前記処理胴19による処理で生じた処理物は、前記脱穀装置5から落下し、前記選別装置6で選別される。
【0039】
次に、前記選別装置6についてより詳細に説明する。
【0040】
図2及び図3に示すように、前記選別装置6は、本実施形態に係る前記揺動選別装置200と、前記一番樋310と、前記二番樋320とを備えている。
【0041】
前記揺動選別装置200は、機体前後方向に揺動される揺動機枠201と、前記揺動機枠201に支持されたフィードパン202と、前記フィードパン202の後方側に隣接するように前記揺動機枠201に支持されたチャフシーブ機構203とを備えている。前記揺動選別装置200は、前記扱胴18を有する前記脱穀装置5から落下する脱穀物を揺動選別して、当該揺動選別装置32の下方において機体前後方向に順に配置された前記一番樋310及び前記二番樋320のそれぞれに振り分ける。
【0042】
前記揺動選別装置200は、前記扱胴18に臨むように前記脱穀装置5の下方に配置されて、前記扱室57と連通されている。
【0043】
前記揺動機枠201は、前記扱室57の下方に配置され、前記走行機体に機体前後方向に揺動可能に支持されている。そして、前記揺動機枠201は、揺動機構(図示せず)の回転軸が回転駆動されることにより、前記走行機体に対して機体前後方向に揺動するように構成されている。前記揺動機枠201は、その長手方向を機体前後方向とし且つ短手方向を機体幅方向とする枠状体である。前記揺動機枠201は、機体上方から見たとき略矩形状の枠状態体ができるように連結された前後及び左右の枠体を有している。
【0044】
前記フィードパン202は、前記脱穀装置5から落下してきた脱穀物を受け止め、そのあとに機体幅方向に分散させつつ前記チャフシーブ機構203へ向けて機体後方側へ搬送するように構成されている。前記フィードパン202は、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている。前記フィードパン202は、機体幅方向に関し前記揺動機枠201の略全域を覆い、且つ機体前後方向に関し前記扱胴18の下方に位置するように設けられている。好ましくは、前記フィードパン202は、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態に配置される。
【0045】
具体的には、前記フィードパン202は、フィードパン本体351と、複数のリード板352とを有している。前記フィードパン本体351は、その上を脱穀物が前記チャフシーブ機構203へ向かって後方側へ流れるように構成されている。前記フィードパン本体351は、前端部が前記扱胴18の前端部よりも前方側に位置し、後端部が前記扱胴18の後端部よりも前方側に配置されている。前記フィードパン本体351は、機体前後方向且つ機体幅方向に延びる板状体で構成されている。
【0046】
前記複数のリード板352は、前記脱穀装置5から前記フィードパン本体351上に落下してきた脱穀物を機体幅方向に関し左方側へ向かって導き分散させるように構成されている。複数のリード板352は、その長手方向の一端部が他端部よりも機体前方側且つ右方側に位置する傾斜状態で、機体幅方向に所定間隔を存しつつ並列配置されている。前記複数のリード板352は、その上端部が前記揺動機枠201の上端部と同程度の高さ位置となるように、前記フィードパン本体351から上方へ向かって立設されている。
【0047】
前記チャフシーブ機構203は、前記脱穀装置5から落下する脱穀物及び前記フィードパン202から送られてくる脱穀物に対して比重選別を行い、一番物(穀粒)を下方に位置する前記一番樋310に流下させるように構成されている。前記チャフシーブ機構203は、前記フィードパン202の後方側に隣接するように配置されている。前記チャフシーブ機構203は、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている。前記チャフシーブ機構203は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。
【0048】
具体的には、前記チャフシーブ機構203は、複数のフィン361を有し、比重選別される脱穀物が隣接するフィン361間を通って、当該チャフシーブ機構203の下方に配置される前記一番樋310へ落下するように構成されている。複数のフィン361は、機体幅方向に延びるように設けられ、機体前後方向に関し所定間隔を存しつつ機体前後方向に並列配置されている。前記複数のフィン361は、下端部が上端部よりも前方側に位置する後傾斜状態で、それぞれ機体幅方向に沿った枢支軸回りに一体的に揺動可能とされている。そして前記複数のフィン361のうち隣接するフィン361間の前記間隔(開口幅)が、駆動機構(図示せず)によって当該フィン361の傾斜角を変更することによって調整可能とされている。
【0049】
本実施形態においては、前記揺動選別装置200は、ストローラック機構204と、グレンシーブ機構205とをさらに備えている。
【0050】
前記ストローラック機構204は、前記チャフシーブ機構203から送られてくる脱穀物に対して比重選別を行い、この脱穀物のうち、穀粒よりも比重の軽い二番物(枝梗付き穀粒や穂切れ物等)を当該ストローラック機構204の下方に位置する前記二番樋320に流下させるとともに、脱穀物のうち排藁等を機外に送るように構成されている。前記ストローラック機構204は、前記チャフシーブ機構203の後方側に隣接するように配置されている。前記ストローラック機構204は、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている
【0051】
前記グレンシーブ機構205は、前記チャフシーブ機構203から流下する選別物をさらに精選するように構成されている。前記グレンシーブ機構205は、機体上下方向に関し前記チャフシーブ機構203と前記一番樋310との間に位置するように配置されて、前記揺動機枠201と一体的に揺動するように当該揺動機枠201に支持されている。具体的には、前記グレンシーブ機構205は、複数(本実施形態においては2つ)の網状体で構成されている。これらの網状体は、上下方向に関し互いに所定間隔を隔て且つ重合された状態で配置されている。
【0052】
また、前記揺動選別装置200は粗選機構210をさらに備えている。
【0053】
図5に、本実施形態に係る前記揺動選別装置200の前部付近の斜視図を示す。図6に、前記揺動選別装置200の前部付近の平面図を示す。図7に、前記揺動選別装置200の前部付近の一部拡大平面図を示す。図8に、前記揺動選別装置200の前部付近の側面断面図を示す。
【0054】
図2、図3、図5、図6、図7及び図8に示すように、前記粗選機構210は、前記フィードパン202及び前記チャフシーブ機構203よりも上方において機体幅方向に関し前記揺動機枠201の略全域を覆い且つ機体前後方向に関し前記フィードパン202及び前記チャフシーブ機構203の境界208を跨いた状態で前記揺動機枠201と一体的に揺動するように、前記揺動機枠201に直接又は間接的に支持されている。前記粗選機構210は、前記脱穀装置5から前記フィードパン202に向かって落下する脱穀物のうち所定の大きさより大きい脱穀物(穂切れ物等)の少なくとも一部を前記フィードパン202をバイパスさせて前記チャフシーブ機構203に送るように構成されている。
【0055】
このような粗選機構210を備える前記揺動選別装置200によれば、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記フィードパン202上に大きな穂切れ物が過度に落下することを前記粗選機構210によって有効に防止でき、前記フィードパン202上には主として前記所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、脱穀物を機体幅方向に分散させつつ後方へ搬送する前記フィードパン202の作用を良好に維持することができる。前記チャフシーブ機構203へ送られた所定の大きさより大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0056】
また、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記チャフシーブ機構203のうち前記フィードパン202に近接する前端部に当該フィードパン202から送られてくる穂切れ物及び前記脱穀装置5から直接落下してくる穂切れ物が集中することを前記粗選機構210によって有効に防止でき、前記チャフシーブ機構203の前端部には主として所定の前記大きさよりも小さい脱穀物のみを落下させることができる。したがって、前記チャフシーブ機構203の前端部における選別性能を良好に維持することができる。
【0057】
なお、前記所定の大きさより大きい脱穀物とは例えば一方向の幅が所定値以上の脱穀物であり、前記所定の大きさより小さい脱穀物とは例えば前記一方向の幅が所定値未満の脱穀物である。
【0058】
本実施形態においては、前記選別装置6は風選別装置250をさらに備えている。前記風選別装置250は、風選別を行うためのものである。前記風選別装置250は、前記揺動選別装置200に対して選別風を送出するように構成されており、前記選別風によって当該揺動選別装置200による穀粒の選別を促進させ得るようになっている。
【0059】
前記風選別装置250は、唐箕ファン251と吸引ファン252とを有している。前記唐箕ファン251は、機体幅方向に沿った駆動軸によって回転駆動されることによって、前記揺動選別装置200に対して前下方から後上方へ抜ける選別風を送出するように構成されている。前記唐箕ファン251は、前記チャフシーブ機構203の前方且つ下方に配置されている。
【0060】
前記吸引ファン252は、機体幅方向に沿った回転軸によって回転駆動されることによって、前記唐箕ファン251からの選別風を吸引して機外に排出させるように構成されている。前記吸引ファン252は、前記揺動選別装置200よりも上方且つ前記扱室57の後方(穀稈搬送方向下流側)に配置されている。
【0061】
前記一番樋310は、前記揺動選別装置200の下方に配設され、前記選別装置6によって選別処理された一番物を回収し得るように、側面視凹状とされている。本実施形態において、前記一番樋310は、機体幅方向に延びる前方側の傾斜板311と後方側の第1流穀板312とによって側面視凹状に形成されている。この第1流穀板312は、前記揺動機枠201と一体的に揺動するように、当該揺動機枠201に支持されている。前記一番樋310に回収された一番物は、一番搬送装置により搬送されて、前記穀粒タンク26に収容される。
【0062】
具体的には、前記一番搬送装置は、一番コンベア315と、揚穀コンベア316とを有している。前記一番コンベア315は、機体前後方向に関し前記前方側の傾斜板311と前記後方側の第1流穀板312との間に機体幅方向に延びるように配設されて、前記一番樋310内の一番物を前記一番樋310の機体幅方向一方側(右側)へ搬送できるように構成されている。前記揚穀コンベア316は、前記脱穀装置5の機体幅方向一方側(右側)において機体上下方向に延びるように配設されて、前記一番コンベア315によって搬送されてきた一番物を受け継ぎ、前記穀粒タンク26の上部へ搬送するように構成されている。
【0063】
前記穀粒搬送装置の二番樋320は、前記揺動選別装置200の下方且つ前記一番樋310の後方(穀稈搬送方向下流側)に配設され、前記揺動選別装置200及び前記風選別装置250によって選別処理された二番物を回収し得るように側面視凹状とされている。本実施形態において、前記二番樋320は、機体幅方向に延びる前方側の傾斜板321と後方側の傾斜板322及び第2流穀板323とによって側面視凹状に形成されている。この第2流穀板323は、前記揺動機枠201と一体的に揺動するように、当該揺動機枠201に支持されている。前記二番樋320に回収された二番物は、二番還元装置により搬送されて、前記処理胴19に供給され、再脱穀されたあとに再選別される。
【0064】
具体的には、前記二番還元装置は、二番コンベア325と、二番還元コンベア326とを有している。前記二番コンベア325は、機体前後方向に関し前記前方側の傾斜板321と前記後方側の傾斜板322との間に機体幅方向に延びるように配設されて、前記二番樋320内の二番物を前記二番樋320の機体幅方向一方側(右側)へ搬送できるように構成されている。前記二番還元コンベア326は、前記脱穀装置5の機体幅方向一方側(右側)において機体上下方向に延びるように配設されて、前記二番コンベア325によって搬送されてきた二番物を受け継ぎ、前記処理胴19に向けて搬送するように構成されている。
【0065】
好ましくは、実施形態1に係る前記揺動選別装置200の粗選機構210は次のように構成される。前記粗選機構210についてより詳細に説明する。
【0066】
図5、図6、図7、図8に示すように、前記粗選機構210は、複数の粗選ユニット、ここでは第1粗選ユニット211及び第2粗選ユニット212を備えている。図9に、前記揺動選別装置200における前記粗選機構210の第1粗選ユニット211の斜視図を示す。本実施形態においては、前記第1粗選ユニット211と前記第2粗選ユニット212とは、実質的に互いに同一構成とされている。そのため、後述の説明においては前記第1粗選ユニット211と前記第2粗選ユニット212とにおいて対応する部材には同一符号を付し、前記第1粗選ユニット211の構成を中心に説明する。
【0067】
前記第1粗選ユニット211及び前記第2粗選ユニット212のそれぞれは、機体前後方向に延びる複数の梁231であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁231を有している。前記第1粗選ユニット211は、前端部が前記フィードパン202上に位置するように配置されている。前記第2粗選ユニット212は、上下方向に関し前記第1粗選ユニット211よりも下方に配置され、機体前後方向に関し前端部が前記第1粗選ユニット211の後端部と重合された状態で後端部が前記チャフシーブ機構203上に位置するように配置され、且つ、機体幅方向に関し前記第1粗選ユニット211の梁231が当該第2粗選ユニット212における隣接する複数の梁231の間の前記所定間隔内に位置するように配置されている。
【0068】
前記第1粗選ユニット211は、前記揺動機枠201に直接又は間接的に支持されている。前記第1粗選ユニット211は、前端部が前記フィードパン202、特にその前部上に位置するように配置されている。本実施形態においては、前記第1粗選ユニット211は、後端部が前記フィードパン202の後部上に位置するように配置されている。すなわち、前記第1粗選ユニット211は、前記フィードパン202上にのみ配置されている。
【0069】
好ましくは、前記第1粗選ユニット211は、機体側方から見たとき、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態で前記フィードパン202に沿って延びるように設けられる。
【0070】
前記複数の梁231は、前端部が支持部材237に直接又は間接的に支持され、後端部が自由端部とされている。前記複数の梁231は、それぞれ丸棒状体で構成されている。前記複数の梁231の長手方向の長さは略均一とされている。
【0071】
前記支持部材237は、前記複数の梁231を支持した状態で機体幅方向に延びるように設けられている。前記支持部材237は、前記フィードパン202から立設された一つ又は複数のステー241に支持されている。すなわち、本実施形態においては、前記第1粗選ユニット211は、前記フィードパン202を介して前記揺動機枠201に間接的に支持されている。
【0072】
また、前記第1粗選ユニット211は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。具体的には、前記第1粗選ユニット211は、前記複数の梁231のうち最も左側の梁231が前記揺動機枠201の左枠体近傍に位置し、前記複数の梁231のうち最も右側の梁231が前記揺動機枠201の右枠体近傍に位置するように配置されている。
【0073】
前記第2粗選ユニット212は、前記揺動機枠201に直接又は間接的に支持されている。本実施形態においては、前記第2粗選ユニット212は、前端部が前記フィードパン202の後部に位置し、後端部が前述のとおり前記チャフシーブ機構203上に位置し且つ前記一番樋310上に位置するように配置されている。
【0074】
本実施形態においては、前記第2粗選ユニット212は、前端部が前記第1粗選ユニット211の前端部よりも後方側且つ前記第1粗選ユニット211の後端部よりも前方側に位置し、後端部が前記第1粗選ユニット211の後端部よりも後方側で前記一番樋310の上方に位置するように配置されている。
【0075】
こうして、前記第2粗選ユニット212は、前記第1粗選ユニット211と前記フィードパン202との間から後方へ突出するように設けられている。言い換えれば、前記第1粗選ユニット211及び前記第2粗選ユニット212は、機体側方から見たとき、当該第1粗選ユニット211が上段となり前記第2粗選ユニット212が前記第1粗選ユニット211よりも後方で下段となる上下2段の階段状に配置されている。
【0076】
好ましくは、前記第2粗選ユニット212は、機体側方から見たとき、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態で前記第1粗選ユニット211と略平行に且つ前記フィードパン202に沿って延びるように設けられる。
【0077】
前記第2粗選ユニット212は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。具体的には、前記第2粗選ユニット212は、前記複数の梁231のうち最も左側の梁231が前記揺動機枠201の左枠体近傍に位置し、前記複数の梁231のうち最も右側の梁231が前記揺動機枠201の右枠体近傍に位置するように配置されている。
【0078】
このような第1粗選ユニット211及び第2粗選ユニット212を有する前記粗選機構210を備えた前記揺動選別装置200によって揺動選別が行われる際、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物は、前記フィードパン202に至る前に前記粗選機構210によって粗選される。
【0079】
具体的には、脱穀物が前記粗選機構210の前記第1粗選ユニット211又は前記第2粗選ユニット212に至ったとき、この脱穀物のうち前記所定の大きさよりも大きい脱穀物(穂切れ物等)の少なくとも一部は、前記第1粗選ユニット211においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、当該第1粗選ユニット211の後端部から落下して前記第2粗選ユニット212に至り、前記第2粗選ユニット212においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、前記第2粗選ユニット212の後端部から落下して前記チャフシーブ機構203に至る。こうして、前記脱穀物のうち前記所定の大きさよりも大きい脱穀物の少なくとも一部は、前記フィードパン202上に至らないように当該フィードパン202をバイパスして、前記チャフシーブ機構203に送られる。前記チャフシーブ機構203へ送られた前記所定の大きさよりも大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0080】
好ましくは、図5、図6、図7、図8、及び図9に示すように、前記第1粗選ユニット211及び前記第2粗選ユニット212の少なくとも一方は、機体前後方向に延びる複数の補助梁232であって、前記複数の梁231と比べて機体前後方向の長さが異なる複数の補助梁232を有する。それぞれの前記複数の補助梁232は、機体幅方向に関し前記複数の梁231のうち隣接する複数の梁231の間の所定間隔内に位置する。ここでは、前記各補助梁232は、機体幅方向に関し隣接する梁231双方から略等距離離れた状態とされている。
【0081】
本実施形態においては、前記第1粗選ユニット211及び前記第2粗選ユニット212は、機体前後方向(長手方向)の長さが異なる2種類の梁として前記複数の梁231と、これに比べて機体前後方向の長さが短い前記複数の補助梁232を有しているが、前記第1粗選ユニット211及び前記第2粗選ユニット212の少なくとも一方を穂切れ物の大きさ等に応じて、長手方向の長さが異なる3種類以上の梁を有するように構成することも可能である。
【0082】
前記第1粗選ユニット211及び前記第2粗選ユニット212においては、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存する部分では当該隣接する前記梁231と前記補助梁232との間に第1間隙238が形成され、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存しない部分では当該隣接する前記梁231間に機体幅方向に関し前記第1間隙238に比べて幅の広い第2間隙239が形成されている。
【0083】
これにより、図7に示すように、前記第1粗選ユニット211及び前記第2粗選ユニット212においては、機体幅方向に関し前記梁231と前記補助梁232が略重合する部分では、前記第1間隙238より大きい脱穀物271の前記フィードパン202上への落下が有効に防止又は低減される。そして、機体幅方向に関し前記梁231と前記補助梁232が重合しない部分では、前記第2間隙239より大きい脱穀物271の前記フィードパン202上への落下が有効に防止又は低減される。
【0084】
本実施形態においては、前記複数の補助梁232は、それぞれの前端部が前記支持部材237に直接又は間接的に支持され、それぞれの後端部が自由端部とされている。前記複数の補助梁232は、前記複数の梁231と略同一平面上に配置されている。前記複数の補助梁232はそれぞれ板状体で構成されている。前記複数の補助梁232の長手方向の長さは互いに略均一とされている。
【0085】
こうして、前記第1粗選ユニット211の前側に前記第1間隙238が形成され、後側に前記第2間隙239が形成されている。前記第2粗選ユニット212の前側に前記第1間隙238が形成され、後側に前記第2間隙239が形成されている。すなわち、前記フィードパン202及び前記チャフシーブ機構203の上方において、機体前後方向に順に前記第1粗選ユニット211の第1間隙238、前記第1粗選ユニット211の第2間隙239、前記第2粗選ユニット212の第1間隙238、前記第2粗選ユニット212の第2間隙239が配置されている。これにより、前記フィードパン202上への脱穀物の落下位置を当該脱穀物の大きさに応じて変え得るようになっている。
【0086】
具体的には、図7に示すように、前記第1間隙238より小さい脱穀物272(小脱穀物)は、機体前後方向に関しいずれの位置においても前記粗選機構210を通過して前記フィードパン202上へ落下する。前記第1間隙238よりは大きいが前記第2間隙239よりは小さい脱穀物273(中脱穀物)は、機体前後方向に関し前記補助梁232が位置する領域においては前記粗選機構210を通過せず且つ前記梁231が位置する部分のうち前記補助梁232が位置しない領域において前記粗選機構210を通過する。即ち、本実施形態においては、前記中脱穀物は、主として、前記第1粗選ユニット211の前記補助梁232の後端部と前記第2粗選ユニット212の前端部との間の領域、並びに、前記第2粗選ユニット212の前記補助梁232の後端部より後方側の領域において、前記粗選機構210を通過する。そして、前記第2間隔239より大きい脱穀物271(大脱穀物)は、機体前後方向の全域において前記粗選機構210を通過し難くなっており、前記フィードパン202をバイパスして前記チャフシーブ機構203へ有効に移送される。
【0087】
ここで、前記第2粗選ユニット212の複数の補助梁232は、前記第1粗選ユニット211の梁231と重合した状態に配置されている。そして、前記第2粗選ユニット212の複数の補助梁232は、後端部が前記第1粗選ユニット211の複数の梁231の後端部よりも後方側に位置し且つ前記フィードパン202の後端部よりも前方側に位置するように配置されている。
【0088】
なお、本実施形態においては、前記粗選機構210が二つの粗選ユニット(前記第1粗選ユニット211及び前記第2粗選ユニット212)を備える場合を例に説明したが、本発明に係る揺動選別装置の粗選機構は、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパン202をバイパスさせて前記チャフシーブ機構203に送ることができるものであればよく、例えば単一の粗選ユニット(前記第2粗選ユニット212)のみを備えるものであってもよい。
【0089】
[実施形態2]
次に、実施形態2に係る揺動選別装置200Aについて説明する。ただし、本実施形態は、前記実施形態1に係る揺動選別装置200に補助粗選ユニット213をさらに備えた以外は該実施形態1と実質的に同じ構成をしており、同様の構成をとる部分については説明を省略する。
【0090】
なお、本実施形態においては、前記補助粗選ユニット213は、前記第1粗選ユニット211及び前記第2粗選ユニット212と実質的に同一構成とされている。そのため、後述の説明においては前記補助粗選ユニット213と前記第1粗選ユニット211及び前記第2粗選ユニット212とで対応する部材には、同一符号を付す。
【0091】
図10に、前記コンバイン1における脱穀装置5、及び本実施形態に係る前記揺動選別装置200Aを備えた選別装置6の概略側面断面図を示す。図11に、前記揺動選別装置200Aの前部付近の斜視図を示す。図12に、前記揺動選別装置200Aの前部付近の平面図を示す。図13に、前記揺動選別装置200Aの前部付近の一部拡大平面図を示す。図14に、前記揺動選別装置200Aの前部付近の側面断面図を示す。
【0092】
図10、図11、図12、図13、及び図14に示すように、前記補助粗選ユニット213は、機体前後方向に延びる複数の梁231であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁231を有している。前記補助粗選ユニット213は、前端部が前記フィードパン202の後端部に連結され且つ後端部が前記第2粗選ユニット212より後方側で前記チャフシーブ機構203上に位置している。
【0093】
本実施形態において、前記補助粗選ユニット213は、上下方向に関し前記第2粗選ユニット212よりも下方に配置され、機体前後方向に関し前部が前記第2粗選ユニット212の後部と重合された状態に配置され、且つ、機体幅方向に関し前記第2粗選ユニット212の梁231が当該補助粗選ユニット213における隣接する複数の梁231の間の前記所定間隔内に位置するように配置されている。
【0094】
前記補助粗選ユニット213は、前端部が前記第2粗選ユニット212の前端部よりも後方側且つ前記第2粗選ユニット212の後端部よりも前方側に位置し、後端部が前記第2粗選ユニット212の後端部よりも後方側に位置するように配置されている。ここでは特に前記補助粗選ユニット213は、後端部が前記第1流穀板312上に位置するように配置されている。
【0095】
こうして、前記補助粗選ユニット213は、前記第2粗選ユニット212の下方で前記フィードパン202の後端部から後方へ突出するように設けられている。言い換えれば、前記第2粗選ユニット212及び前記補助粗選ユニット213は、機体側方から見たとき、当該第2粗選ユニット212が上段となり前記補助粗選ユニット213が前記第2粗選ユニット212よりも後方で下段となる上下2段の階段状に配置されている。
【0096】
本実施形態においては、前述のとおり前記第1粗選ユニット211及び前記第2粗選ユニット212が上下2段の階段状に配置されていることから、前記第1粗選ユニット211、前記第2粗選ユニット212及び前記補助粗選ユニット213は、機体側方から見たとき、前記第1粗選ユニット211が最も上段となり、前記補助粗選ユニット213が最も下段となり、前記第2粗選ユニット212が前記第1粗選ユニット211と前記補助粗選ユニット213との間に位置する上下3段の階段状に配置されている。
【0097】
好ましくは、前記補助粗選ユニット213は、機体側方から見たとき、前端部が後端部よりも機体上下方向に関し上方側に位置する下傾斜状態で前記第2粗選ユニット212と前記第2粗選ユニット212と略平行に延びるように設けられる。前記補助粗選ユニット213は、その上面が前記フィードパン202の上面と略同一平面上に位置するように配置されている。
【0098】
前記補助粗選ユニット213は、機体幅方向に関し前記揺動機枠201の略全域を覆うように設けられている。具体的には、前記補助粗選ユニット213は、複数の梁231のうち最も左側の梁231が前記揺動機枠201の左枠体近傍に位置し、前記複数の梁231のうち最も右側の梁231が前記揺動機枠201の右枠体近傍に位置するように配置されている。
【0099】
このような補助粗選ユニット213を備えた前記揺動選別装置200Aによって揺動選別が行われる際、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物は、前記フィードパン202に至る前に前記粗選機構210によって粗選される。
【0100】
具体的には、脱穀物が前記粗選機構210の前記第1粗選ユニット211若しくは前記第2粗選ユニット212、又は前記補助粗選ユニット213に至ったとき、この脱穀物のうち前記所定の大きさよりも大きい脱穀物(穂切れ物等)の少なくとも一部は、前記第1粗選ユニット211においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、当該第1粗選ユニット211の後端部から落下して前記第2粗選ユニット212に至り、前記第2粗選ユニット212においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、前記第2粗選ユニット212の後端部から落下して前記補助粗選ユニット213に至る。前記所定の大きさよりも大きい脱穀物の少なくとも一部は、前記補助粗選ユニット213においては前記複数の梁231間の間隙を通過できずに当該複数の梁231に沿って後方側へ流れ、前記補助粗選ユニット213の後端部から落下して前記チャフシーブ機構203に至る。こうして、前記所定の大きさよりも大きい脱穀物の少なくとも一部は、前記フィードパン202上に至らないように当該フィードパン202をバイパスして、前記第1流穀板312上で前記チャフシーブ機構203に送られる。前記チャフシーブ機構203へ送られた前記所定の大きさよりも大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0101】
このような前記揺動選別装置200Aによれば、実施形態1に係る前記揺動選別装置200と同様に、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記フィードパン202上に大きな穂切れ物が過度に落下することを前記粗選機構210によって有効に防止でき、前記フィードパン202上には主として所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、脱穀物を機体幅方向に分散させつつ後方へ搬送する前記フィードパン202の作用を良好に維持することができる。前記チャフシーブ機構203へ送られた所定の大きさより大きい脱穀物は、主として前記二番樋320に集約され、そのあとに再脱穀される。
【0102】
また、前記脱穀装置5から落下する脱穀物に穂切れ物等が多く含まれる場合であっても、前記チャフシーブ機構203のうち前記フィードパン202に近接する前端部に前記フィードパン202から送られてくる穂切れ物及び前記脱穀装置5から直接落下してくる穂切れ物が集中することを前記粗選機構210によって有効に防止でき、前記チャフシーブ機構203の前端部には主として所定の大きさよりも小さい脱穀物のみを落下させることができる。したがって、前記チャフシーブ機構203の前端部における選別性能をさらに良好に維持することができる。
【0103】
好ましくは、図11、図12、図13、及び図14に示すように、前記補助粗選ユニット213は、機体前後方向に延びる複数の補助梁232であって、前記複数の梁231と比べて機体前後方向の長さが異なる複数の補助梁232を有する。それぞれの前記複数の補助梁232は、機体幅方向に関し前記複数の梁231のうち隣接する複数の梁231の間の所定間隔内に位置する。ここでは、前記各補助梁232は、機体幅方向に関し隣接する梁231双方から略等距離離れた状態とされている。
【0104】
本実施形態においては、前記補助粗選ユニット213は、機体前後方向(長手方向)の長さが異なる2種類の梁として前記複数の梁231と、これに比べて機体前後方向の長さが短い前記複数の補助梁232を有しているが、穂切れ物の大きさ等に応じて、長手方向の長さが異なる3種類以上の梁を有するように構成することも可能である。
【0105】
前記補助粗選ユニット213においては、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存する部分では当該隣接する前記梁231と前記補助梁232との間に第1間隙238が形成され、前記補助梁232が前記複数の梁231のうち隣接する前記梁231の間に存しない部分では当該隣接する前記梁231間に機体幅方向に関し前記第1間隙に比べて幅の広い第2間隙239が形成されている。
【0106】
これにより、図13に示すように、前記補助粗選ユニット213において、機体幅方向に関し前記梁231と前記補助梁232とが略重合する部分では、前記第1間隙238より大きい脱穀物271の前記チャフシーブ機構203上への落下が有効に防止又は低減される。そして、機体幅方向に関し前記梁231と前記補助梁232が重合しない部分では、前記第2間隙239より大きい脱穀物271の前記チャフシーブ機構203上への落下が有効に防止又は低減される。
【0107】
本実施形態においては、前記複数の補助梁232は、それぞれの前端部が支持部材237に直接又は間接的に支持され、それぞれの後端部が自由端部とされている。前記複数の補助梁232は、前記複数の梁231と略同一平面上に配置されている。前記複数の補助梁232はそれぞれ板状体で構成されている。前記複数の補助梁232の長手方向の長さは互いに略均一とされている。
【0108】
こうして、前記補助粗選ユニット213の前側に前記第1間隙238が形成され、後側に前記第2間隙239が形成されている。すなわち、前記チャフシーブ機構203、特にその前部上において、機体前後方向に順に前記補助粗選ユニット213の第1間隙238、前記補助粗選ユニット213の第2間隙239が配置されている。これにより、前記チャフシーブ機構203上への脱穀物の落下位置を当該脱穀物の大きさに応じて変え得るようになっている。
【0109】
具体的には、図13に示すように、前記第1間隙238より小さい脱穀物272(小脱穀物)は、機体前後方向に関しいずれの位置においても前記粗選機構210及び前記補助粗選ユニット213を通過して前記フィードパン202又は前記チャフシーブ機構203上へ落下する。前記第1間隙238よりは大きいが前記第2間隙239よりは小さい脱穀物273(中脱穀物)は、機体前後方向に関し前記補助梁232が位置する領域においては前記粗選機構210を通過せず且つ前記梁231が位置する部分のうち前記補助梁232が位置しない領域において前記粗選機構210を通過する。即ち、本実施形態においては、前記中脱穀物は、主として、前記第1粗選ユニット211の前記補助梁232の後端部と前記第2粗選ユニット212の前端部との間の領域、前記第2粗選ユニット212の前記補助梁232の後端部と前記補助粗選ユニット213の前端部との間の領域、及び、前記補助粗選ユニット213の前記補助梁232の後端部より後方側の領域において、前記粗選機構210を通過する。そして、前記第2間隔239より大きい脱穀物271(大脱穀物)は、機体前後方向の全域において前記粗選機構210を通過し難くなっており、前記フィードパン202をバイパスして前記チャフシーブ機構203へ有効に移送される。また、前記大脱穀物は、機体前後方向の全域において前記補助粗選ユニット213を通過し難くなっており、前記チャフシーブ機構203の前端部をバイパスして当該チャフシーブ機構203の後方側へ有効に移送される。
【0110】
ここで、前記補助粗選ユニット213の複数の補助梁232は、前記第2粗選ユニット212の梁231と重合した状態に配置されている。そして、前記補助粗選ユニット213の複数の補助梁232は、その後端部が前記第2粗選ユニット212の複数の梁231の後端部よりも前方側に位置するように配置されている。
【0111】
なお、本発明に係る揺動選別装置の粗選機構の粗選ユニット及び補助粗選ユニットは、前記脱穀装置5から前記フィードパン202に向けて落下する脱穀物のうち前記所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパン202をバイパスさせることができるものであればよく、その構成は特に限定するものではない。例えば、前記各実施形態においては複数の梁を備える構成としているが、これに代えてスリットが形成されたプレートを備える構成とすることも可能である。
【符号の説明】
【0112】
5 脱穀装置
18 扱胴
200 揺動選別装置
201 揺動機枠
202 フィードパン
203 チャフシーブ機構
208 境界
210 粗選機構
211 第1粗選ユニット
212 第2粗選ユニット
213 補助粗選ユニット
231 梁
310 一番樋
320 二番樋
【特許請求の範囲】
【請求項1】
機体前後方向に揺動される揺動機枠と、前記揺動機枠に支持されたフィードパンと、前記フィードパンの後方側に隣接するように前記揺動機枠に支持されたチャフシーブ機構とを備えた揺動選別装置であって、扱胴を有する脱穀装置から落下する脱穀物を揺動選別して、当該揺動選別装置の下方において機体前後方向に順に配置された一番樋及び二番樋に振り分ける揺動選別装置において、
前記フィードパン及び前記チャフシーブ機構よりも上方において機体幅方向に関し前記揺動機枠の略全域を覆い且つ機体前後方向に関し前記フィードパン及び前記チャフシーブ機構の境界を跨いた状態で前記揺動機枠と一体的に揺動するように前記揺動機枠に直接又は間接的に支持された粗選機構を備え、
前記粗選機構は、前記脱穀装置から前記フィードパンに向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパンをバイパスさせて前記チャフシーブ機構に送るように構成されていることを特徴とする揺動選別装置。
【請求項2】
前記粗選機構は、機体前後方向に延びる複数の梁であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁を有する第1及び第2粗選ユニットを備え、
前記第1粗選ユニットは、前端部が前記フィードパン上に位置するように配置され、
前記第2粗選ユニットは、上下方向に関し前記第1粗選ユニットよりも下方に配置され、機体前後方向に関し前端部が前記第1粗選ユニットの後端部と重合された状態で後端部が前記チャフシーブ機構上に位置するように配置され、且つ、機体幅方向に関し前記第1粗選ユニットの梁が当該第2粗選ユニットにおける隣接する複数の梁の間の前記所定間隔内に位置するように配置されていることを特徴とする請求項1に記載の揺動選別装置。
【請求項3】
機体前後方向に延びる複数の梁であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁を有する補助粗選ユニットを備え、
前記補助粗選ユニットは、前端部が前記フィードパンの後端部に連結され且つ後端部が前記第2粗選ユニットより後方側で前記チャフシーブ機構上に位置していることを特徴とする請求項2に記載の揺動選別装置。
【請求項1】
機体前後方向に揺動される揺動機枠と、前記揺動機枠に支持されたフィードパンと、前記フィードパンの後方側に隣接するように前記揺動機枠に支持されたチャフシーブ機構とを備えた揺動選別装置であって、扱胴を有する脱穀装置から落下する脱穀物を揺動選別して、当該揺動選別装置の下方において機体前後方向に順に配置された一番樋及び二番樋に振り分ける揺動選別装置において、
前記フィードパン及び前記チャフシーブ機構よりも上方において機体幅方向に関し前記揺動機枠の略全域を覆い且つ機体前後方向に関し前記フィードパン及び前記チャフシーブ機構の境界を跨いた状態で前記揺動機枠と一体的に揺動するように前記揺動機枠に直接又は間接的に支持された粗選機構を備え、
前記粗選機構は、前記脱穀装置から前記フィードパンに向けて落下する脱穀物のうち所定の大きさより大きい脱穀物の少なくとも一部を前記フィードパンをバイパスさせて前記チャフシーブ機構に送るように構成されていることを特徴とする揺動選別装置。
【請求項2】
前記粗選機構は、機体前後方向に延びる複数の梁であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁を有する第1及び第2粗選ユニットを備え、
前記第1粗選ユニットは、前端部が前記フィードパン上に位置するように配置され、
前記第2粗選ユニットは、上下方向に関し前記第1粗選ユニットよりも下方に配置され、機体前後方向に関し前端部が前記第1粗選ユニットの後端部と重合された状態で後端部が前記チャフシーブ機構上に位置するように配置され、且つ、機体幅方向に関し前記第1粗選ユニットの梁が当該第2粗選ユニットにおける隣接する複数の梁の間の前記所定間隔内に位置するように配置されていることを特徴とする請求項1に記載の揺動選別装置。
【請求項3】
機体前後方向に延びる複数の梁であって、機体幅方向に所定間隔を存しつつ並列配置された複数の梁を有する補助粗選ユニットを備え、
前記補助粗選ユニットは、前端部が前記フィードパンの後端部に連結され且つ後端部が前記第2粗選ユニットより後方側で前記チャフシーブ機構上に位置していることを特徴とする請求項2に記載の揺動選別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−106589(P2013−106589A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256076(P2011−256076)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]