
損失係数測定装置
【課題】容器と容器に収容される粒状体の相互作用により発生する制振効果を、広く一般に用いられている指標を用いて簡便に得る。
【解決手段】粒状体11を収容しない容器10を加振装置20で加振して、容器10の加振力及び加速度を力センサ30及び加速度センサ32で検出し、FFT装置40で動質量の実部及び虚部を算出する。次に、粒状体11を収容した容器10を加振装置20で加振して、容器10の加振力及び加速度を力センサ30及び加速度センサ32で検出し、FFT装置40で動質量の実部及び虚部を算出する。そして、損失係数計算部41でFFT装置40の計算結果を数1の式に代入して損失係数を算出する損失係数測定装置1とする。
【解決手段】粒状体11を収容しない容器10を加振装置20で加振して、容器10の加振力及び加速度を力センサ30及び加速度センサ32で検出し、FFT装置40で動質量の実部及び虚部を算出する。次に、粒状体11を収容した容器10を加振装置20で加振して、容器10の加振力及び加速度を力センサ30及び加速度センサ32で検出し、FFT装置40で動質量の実部及び虚部を算出する。そして、損失係数計算部41でFFT装置40の計算結果を数1の式に代入して損失係数を算出する損失係数測定装置1とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器と容器に収容される粒状体の相互作用により発生する制振効果を表す指標である粒状体の損失係数を測定する損失係数測定装置に関するものである。
【背景技術】
【0002】
従来から、金属形材製の構造物は軽量かつ簡便である一方、剛性や重量が少なく振動や騒音が生じるため、振動や騒音対策が必要となっている。そこで、粒状体を用いて構造物に制振性を付与する技術が開発されている。例えば、特許文献1に示す技術では、住宅建設などにおいて金属形材製の枠材とこの枠材の内側に渡される金属形材製の梁材との骨組みを有する床構造に関して、制振性を付与して防音性能を向上させるために、梁材の中空部に粒状体を収容させている。
【0003】
そして、従来から、このような粒状体を用いた構造物の制振性を評価する技術も開発されている。例えば、非特許文献1に示す技術は、異なる形状の鋼製円筒にパウダー充填率の異なるパウダーコンポジットダンパーを構成して、実験的に求められた構造全体の対数減衰率を測定することにより、制振効果を評価するものである。また、非特許文献2に示す技術は、粒状体層を振動体に衝突させて衝撃ダンパとして用いた場合の制振効果を、理論計算と実験により得られた振動系全体の応答倍率により評価するものである。さらに、非特許文献3に示す技術は、付加質量を容器に収納した粒状体の上に乗せて動吸振器として用いた場合の制振効果を、実験により求めた振動系全体の応答倍率にカーブフィットして粒状体の上に付加質量が乗った場合の粒状体のバネ定数と減衰係数により評価するものである。
【0004】
【特許文献1】特開2002−115363号公報
【非特許文献1】田辺郁男他、日本機械学会論文集C編64巻628号、1998−12、p327−332
【非特許文献2】荒木嘉昭他、日本機械学会論文集C編49巻442号、1983−6、p945−951
【非特許文献3】Yanagida T.、Powder Technology Vol.127 No.2、2002、p107−115
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、非特許文献1に記載の技術は、粒状体を充填する構造が変化すれば対数減衰率も変化するため、一般性を欠くという問題がある。また、非特許文献2に記載の技術は、構造と粒状体が決定できれば応答倍率を計算することが可能になるが、その計算量は膨大であり簡便性に欠けるという問題がある。更に、非特許文献3に記載の技術は、粒状体の上に付加質量が乗った振動系について、粒状体を等価なバネ要素と減衰要素に置き換えて、実験値からバネ定数と減衰係数を求めるものであり、付加質量のない場合には振動系が異なり適用することができず、一般性を欠くという問題がある。尚、非特許文献1及び2に記載の技術は、粒状体が構造物に及ぼす制振効果を直接測定する方法が示されておらず、新規に粒状体を充填して制振効果を得ようとする場合には、予めその効果を予測することができないという問題もある。
【0006】
本発明の目的は、容器(構造物)と容器に収容される粒状体の相互作用により発生する制振効果を、広く一般に用いられている指標を用いて簡便に得ることができる損失係数測定装置を提供することである。
【課題を解決するための手段及び効果】
【0007】
本発明に係る損失係数測定装置は、容器に収容される粒状体の損失係数を測定する損失係数測定装置において、前記容器を振動させる加振手段と、前記容器に作用する加振力を検出する力検出手段と、前記容器の振動加速度を検出する加速度検出手段と、前記加振力及び前記振動加速度の時間波形から動質量の周波数応答における周波数ごとの実部及び虚部を計算する係数計算手段と、前記実部及び前記虚部から損失係数を計算する損失係数計算手段と、を有することを特徴とする。
【0008】
ここで、本発明に係る損失係数測定装置は、前記係数計算手段が、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、を計算し、前記損失係数計算手段が、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、から、次式(数1)の計算式を用いて損失係数ηを計算する。
【0009】
【数1】

【0010】
これによると、粒状体と粒状体が収容される容器との相互作用により発生する制振効果を、広く一般に用いられている損失係数を用いて簡便に求めることができる。即ち、容器内に粒状体を収容しない場合の振動系の運動方程式は、容器の慣性質量をmb、力センサの慣性質量をmf、加速度センサの慣性質量をmaとすると、減衰要素とバネ要素がないので、次式(数2)のように表すことができる。
【0011】
【数2】
【0012】
したがって、動質量は、次式(数3)になる。
【0013】
【数3】
【0014】
しかし、実際の測定において、加振力の信号と加速度の信号の間には、力検出手段及び加速度検出手段として用いられるセンサやアンプ等の電気回路が異なるために位相差φが存在し、数3の式の虚部はゼロとならず、次式(数4)のようになる。
【0015】
【数4】
【0016】
数4の式は、本来、数3の式と一致すべきであるから、φ=0となるべきである。したがって、数4の式は次式(数5)となる。
【0017】
【数5】
【0018】
以上から、次式(数6)を得る。
【0019】
【数6】
【0020】
一方、容器内に粒状体を収容した場合の振動系の運動方程式は、粒子の慣性質量をmp、粒子の作用により得られる減衰係数をcp、虚数単位をjとすると、バネ要素がないので、次式(数7)のように書くことができる。
【0021】
【数7】
【0022】
この数7の式に、次式(数8)を代入する。
【0023】
【数8】
【0024】
そして、整理をして次式(数9)が得られる。
【0025】
【数9】
【0026】
しかし、先述したように、加振力の信号と加速度の信号の間には、力検出手段及び加速度検出手段として用いられるセンサやアンプ等の電気回路が異なるために生じる位相差φがあるので、動質量の測定結果は次式(数10)のようになる。
【0027】
【数10】
【0028】
この数10の式において、φ=0とすることにより、真の動質量を求めることができる。したがって、数4の式と数10の式より、次式(数11)が得られる。
【0029】
【数11】
【0030】
また、数9の式、数10の式、数11の式より、次式(数12)が得られる。
【0031】
【数12】
【0032】
そして、一般に制振効果を示す指標の一つとして広く用いられている損失係数ηは1ラジアンあたりに散逸されるエネルギーの全運動エネルギーに対する比として定義される。一般の運動方程式から、一周期あたりの散逸エネルギーDは次式(数13)のように求められる。
【0033】
【数13】
【0034】
また、運動エネルギーEkinは、次式(数14)である。
【0035】
【数14】
【0036】
したがって、一周期あたりの散逸エネルギーの運動エネルギー最大値に対する比(減衰能力Ψ)は、次式(数15)となる。
【0037】
【数15】
【0038】
したがって、損失係数ηは次式(数16)となる。
【0039】
【数16】
【0040】
以上により、数9の式、数12の式、数16の式から、損失係数ηが以下の式(数17)のように表される。
【0041】
【数17】
【0042】
したがって、数17の式に、振動実験により得られる容器に粒状体を収容しない状態での実際の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、振動実験により得られる容器に粒状体を収容した状態での動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesとを代入することにより、粒状体の損失係数を簡便に求めることができる。尚、数12の式より、粒状体の慣性質量を測定することなく同時に求めることができる。以上により、制振効果を一般的に且つ簡易に評価することができることがわかる。
【発明を実施するための最良の形態】
【0043】
以下、図面を参照しつつ、本発明の好適な実施形態について説明する。
【0044】
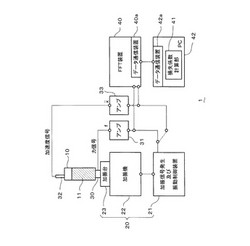
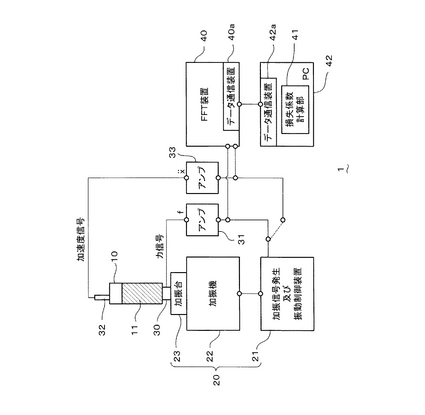
まず、本発明の実施形態による損失係数測定装置の構成を、図1に基づいて説明する。図1は、損失係数測定装置のブロック図である。
【0045】
図1に示すように、損失係数測定装置1は、容器10と、容器に収容される粒状体11と、加振装置(加振手段)20と、力センサ(力検出手段)30と、加速度センサ(加速度検出手段)32と、周波数分析(FFT)装置(係数計算手段)40と、パーソナルコンピュータ(PC)42に設けられた損失係数計算部(損失係数計算手段)41とから構成されている。
【0046】
容器10は、損失係数の測定対象である粒状体11を収容するものである。容器10及び粒状体11は、様々な形状及び材料を用いることができるが、数2の式及び数7の式が成立するために粒状体11と接触する容器10が剛とみなせる程に剛性の高い容器10とすることが望ましい。
【0047】
加振装置20は、加振信号発生及び振動制御装置21と、加振機22と、加振台23とから構成される。加振信号発生及び振動制御装置21により入力された加振信号に基づいて、加振機22の振動が制御される。加振機22は、油圧や電動で振動する。そして、加振機22に取り付けられた加振台23上の容器10が振動される。即ち、加振信号発生及び振動制御装置21により入力された加振信号に基づいて、任意の加振周波数で、容器10の変位が上下方向に振動するように制御される。尚、加振装置20は、加振信号発生及び振動制御装置21で加振周波数を変化させることができる。また、加振信号発生及び振動制御装置21は、アンプ31及びアンプ33を介して、力センサ30及び加速度センサ32からの信号を取り込み、正確に加振周波数を与えることができる。また、加振台23及び容器10に作用する加振力または加速度を一定の振幅まま加振周波数を増減可能とすることができる。粒状体11と容器10との相対運動による摩擦や、粒状体11と容器10及び粒状体11同士の衝突により、運動量変化が相乗して制振効果が発現することから、容器10に作用する加速度(加振力)の振幅によって制振効果が変化するので、加速度又は加振力の振幅を一定に保ちながら加振周波数を変化させる必要がある。
【0048】
力センサ30は、容器10に作用する加振力を検出する。そして、検出した加振力は、アンプ31を経由してFFT装置40に入力される。
【0049】
加速度センサ32は、容器10の振動加速度(以下、「加速度」と略する。)を検出する。そして、検出した加速度は、アンプ33を経由してFFT装置40に入力される。尚、容器10の加速度を検出する加速度検出手段は加速度センサ32に限らず、位置センサまたは速度センサを用い、検出した位置または速度を微分することにより加速度を検出しても良い。また、力センサ30と加速度センサ32が一体化したインピーダンスヘッドと呼ばれるセンサを用いることで、加振力と加速度とを測定しても良い。
【0050】
FFT装置40は、一般にはFFTアナライザであり、力センサ30及び加速度センサ32から、アンプ31及び/又はアンプ33を介して、加振力及び加速度の時間波形を取り込み、動質量の周波数応答における周波数ごとの実部と虚部をフーリエ変換により算出し、算出した結果をデータ通信装置40a及びデータ通信装置42aを介してPC42の損失係数計算部41に出力する。即ち、FFT装置40は、粒状体11を容器10に収容しない場合は、力センサ30及び加速度センサ32から取り込んだ加振力及び加速度から、動質量の周波数応答における周波数ごとの実部mrmesと虚部mimesをフーリエ変換により算出する。また、FFT装置40は、粒状体11を容器10に収容した場合は、力センサ30及び加速度センサ32から取り込んだ加振力及び加速度から、動質量の周波数応答における周波数ごとの実部Mrmesと虚部Mimesをフーリエ変換により算出する。尚、動質量の周波数応答における周波数ごとの実部と虚部を算出する係数計算手段は、FFT装置40に限らない。例えば、PC42に取り付けたFFTボード又はDSPボードにおいて、力センサ30及び加速度センサ32から加振力及び加速度を取り込み、動質量の周波数応答における周波数ごとの実部と虚部をフーリエ変換により算出しても良い。また、PC42に設けたプログラムである係数計算部において、力センサ30及び加速度センサ32からAD変換ボードを介して加振力及び加速度を取り込み、動質量の周波数応答における周波数ごとの実部と虚部をフーリエ変換により算出しても良い。
【0051】
損失係数計算部41は、FFT装置40からの動質量の実部及び虚部の計算結果を取り込み、上述した数1の式に従って、損失係数を算出するプログラムである。算出した損失係数の計算結果はPC42のディスプレイ等に表示する。
【0052】
尚、PC42は、損失係数計算部41における損失係数の算出と同時に、上述した数12の式に従って粒状体の慣性質量mpを計算するプログラムである慣性質量計算部(図示せず)を有してもよい。算出した粒状体の慣性質量の計算結果はPC42のディスプレイ等に表示する。
【0053】
次に、本実施の形態に係る損失係数測定装置1を用いた粒状体11の損失係数の測定方法について説明する。
【0054】
(1)事前測定ステップ
まず、容器10に粒状体11を収容しない状態で、容器10の加振力と加速度を測定し、動質量の周波数応答における周波数ごとの実部と虚部とを計算する。これは、容器10に粒状体11を収容した状態では、粒状体の質量に加えて、容器10の質量、力センサ30の質量、加速度センサ32の質量が含まれた状態での動質量となるためであり、粒状体11そのものの動質量を求める必要があるからである。
【0055】
事前測定ステップでは、容器10に粒状態11を収容しない状態で、加振装置20で容器10を上下方向に加振する。そして、加振することによって発生する容器10に作用する加振力を力センサ30で測定し、容器10の加速度を加速度センサ32で測定する。そして、測定された加振力、加速度をFFT装置40が取り込み、動質量の周波数応答における周波数ごとの実部mrmesと虚部mimesとをフーリエ変換により計算する。
【0056】
(2)本測定ステップ
本測定ステップでは、まず、容器10に測定対象となる粒状体11を収容する。そして、容器10に粒状態11を収容した状態で、加振装置20で容器10を上下方向に加振する。そして、加振することによって発生する容器10に作用する加振力を力センサ30で測定し、容器10の加速度を加速度センサ32で測定する。そして、測定された加振力、加速度をFFT装置40が取り込み、動質量の周波数応答における周波数ごとの実部Mrmesと虚部Mimesとをフーリエ変換により計算する。
【0057】
(3)損失係数計算ステップ
そして、損失係数計算ステップにおいて、事前測定ステップで計算した動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、本測定ステップで計算した動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesとを損失係数計算部41が取り込み、次式(数1)に従って損失係数を算出する。また、同時に数12の式に従って粒状体の慣性質量を算出する。尚、粒状体の慣性質量は必ずしも算出する必要はない。
【0058】
【数1】
【0059】
そして、算出した損失係数及び粒状体の慣性質量の計算結果はPC42のディスプレイ等に表示する。
【0060】
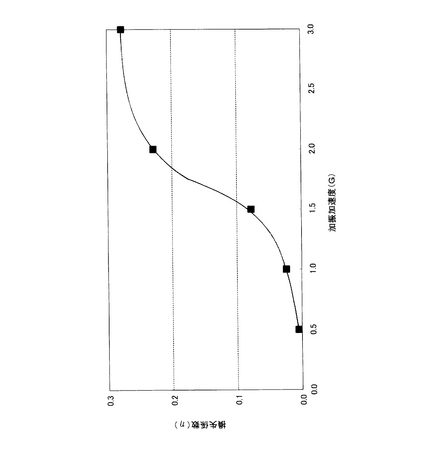
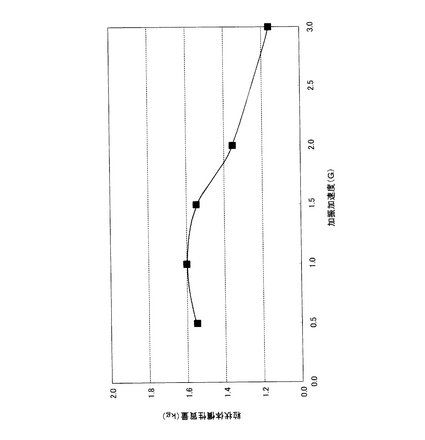
以上で説明した本実施の形態に係る損失係数測定装置1を用いて行った振動実験について、図2及び図3に基づいて説明する。図2は、損失係数と加振加速度との関係を示す実験結果である。図3は、損失係数と同時に測定される粒状体慣性質量と加振加速度との関係を示す実験結果である。尚、実験においては、容器10としてW40×H235×D100の箱状容器を用いた。また、粒状体11として還元ペレットを用い、その充填量は1.56kgとした。
【0061】
図2において、縦軸は、加振周波数が50Hz1/3オクターブバンド周波数の範囲に相当する44.5〜56Hzの範囲について測定した損失係数の平均値であり、横軸は、容器に作用する振動加速度振幅(図2では「加振加速度」と示す。単位G)である。図2に示すように、容器に作用する加振加速度が1.6Gを超えると損失係数が0.1以上になることがわかる。
【0062】
図3において、縦軸は、加振周波数が50Hz1/3オクターブバンド周波数の範囲に相当する44.5〜56Hzの範囲について測定した粒状体の慣性質量mpの平均値であり、横軸は、容器に作用する振動加速度振幅(図2では「加振加速度」と示す。単位G)である。図3に示すように、容器に作用する加振加速度が増加すると共に慣性質量が減少することがわかる。これは、跳躍する粒状体が増加することを意味する。したがって、図2及び図3から、粒状体の跳躍量に比例して損失係数が増大することと対応していることがわかる。
【0063】
本実施の形態に係る損失係数測定装置1によると、粒状体11と、粒状体11が収容される容器10との相互作用により発生する制振効果として、広く一般に用いられている粒状体11の損失係数が、数1の式に、振動実験により得られる容器に粒状体を収容しない状態での実際の動質量の周波数応答における周波数ごとの虚部mrmes及び虚部mimesと、振動実験により得られる容器に粒状体を収容した状態での動質量の周波数応答における周波数ごとの虚部Mrmes及び虚部Mimesとを代入することにより、粒状体の損失係数を簡便に求めることができる。また、数12の式より、粒状体の慣性質量を測定することなく同時に求めることができる。以上により、発振効果を一般的に且つ簡易に評価することができることがわかる。
【0064】
以上、本発明の好適な実施形態について説明したが、本発明はその趣旨を超えない範囲において変更が可能である。
【0065】
本実施の形態では、粒状体11として還元ペレットを用いたが、それに限らず、様々な材料を用いることができる。また、充填量も限定されるものではない。容器10も様々な形状及び材質のものを用いることができる。更に、加振方向は上下方向に限定されるものでなく、水平方向や斜め方向等、加振方向を自由に変更しても良い。
【図面の簡単な説明】
【0066】
【図1】損失係数測定装置のブロック図である。
【図2】損失係数と加振加速度との関係を示す実験結果である。
【図3】粒状体慣性質量と加振加速度との関係を示す実験結果である。
【符号の説明】
【0067】
1 損失係数測定装置
10 容器
11 粒状体
20 加振装置(加振手段)
21 加振信号発生及び振動制御装置
22 加振機
23 加振台
30 力センサ(力検出手段)
32 加速度センサ(加速度検出手段)
40 FFT装置(係数計算手段)
41 損失係数計算部(損失係数計算手段)
42 パーソナルコンピュータ(「PC」と略す)
【技術分野】
【0001】
本発明は、容器と容器に収容される粒状体の相互作用により発生する制振効果を表す指標である粒状体の損失係数を測定する損失係数測定装置に関するものである。
【背景技術】
【0002】
従来から、金属形材製の構造物は軽量かつ簡便である一方、剛性や重量が少なく振動や騒音が生じるため、振動や騒音対策が必要となっている。そこで、粒状体を用いて構造物に制振性を付与する技術が開発されている。例えば、特許文献1に示す技術では、住宅建設などにおいて金属形材製の枠材とこの枠材の内側に渡される金属形材製の梁材との骨組みを有する床構造に関して、制振性を付与して防音性能を向上させるために、梁材の中空部に粒状体を収容させている。
【0003】
そして、従来から、このような粒状体を用いた構造物の制振性を評価する技術も開発されている。例えば、非特許文献1に示す技術は、異なる形状の鋼製円筒にパウダー充填率の異なるパウダーコンポジットダンパーを構成して、実験的に求められた構造全体の対数減衰率を測定することにより、制振効果を評価するものである。また、非特許文献2に示す技術は、粒状体層を振動体に衝突させて衝撃ダンパとして用いた場合の制振効果を、理論計算と実験により得られた振動系全体の応答倍率により評価するものである。さらに、非特許文献3に示す技術は、付加質量を容器に収納した粒状体の上に乗せて動吸振器として用いた場合の制振効果を、実験により求めた振動系全体の応答倍率にカーブフィットして粒状体の上に付加質量が乗った場合の粒状体のバネ定数と減衰係数により評価するものである。
【0004】
【特許文献1】特開2002−115363号公報
【非特許文献1】田辺郁男他、日本機械学会論文集C編64巻628号、1998−12、p327−332
【非特許文献2】荒木嘉昭他、日本機械学会論文集C編49巻442号、1983−6、p945−951
【非特許文献3】Yanagida T.、Powder Technology Vol.127 No.2、2002、p107−115
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、非特許文献1に記載の技術は、粒状体を充填する構造が変化すれば対数減衰率も変化するため、一般性を欠くという問題がある。また、非特許文献2に記載の技術は、構造と粒状体が決定できれば応答倍率を計算することが可能になるが、その計算量は膨大であり簡便性に欠けるという問題がある。更に、非特許文献3に記載の技術は、粒状体の上に付加質量が乗った振動系について、粒状体を等価なバネ要素と減衰要素に置き換えて、実験値からバネ定数と減衰係数を求めるものであり、付加質量のない場合には振動系が異なり適用することができず、一般性を欠くという問題がある。尚、非特許文献1及び2に記載の技術は、粒状体が構造物に及ぼす制振効果を直接測定する方法が示されておらず、新規に粒状体を充填して制振効果を得ようとする場合には、予めその効果を予測することができないという問題もある。
【0006】
本発明の目的は、容器(構造物)と容器に収容される粒状体の相互作用により発生する制振効果を、広く一般に用いられている指標を用いて簡便に得ることができる損失係数測定装置を提供することである。
【課題を解決するための手段及び効果】
【0007】
本発明に係る損失係数測定装置は、容器に収容される粒状体の損失係数を測定する損失係数測定装置において、前記容器を振動させる加振手段と、前記容器に作用する加振力を検出する力検出手段と、前記容器の振動加速度を検出する加速度検出手段と、前記加振力及び前記振動加速度の時間波形から動質量の周波数応答における周波数ごとの実部及び虚部を計算する係数計算手段と、前記実部及び前記虚部から損失係数を計算する損失係数計算手段と、を有することを特徴とする。
【0008】
ここで、本発明に係る損失係数測定装置は、前記係数計算手段が、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、を計算し、前記損失係数計算手段が、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、から、次式(数1)の計算式を用いて損失係数ηを計算する。
【0009】
【数1】
【0010】
これによると、粒状体と粒状体が収容される容器との相互作用により発生する制振効果を、広く一般に用いられている損失係数を用いて簡便に求めることができる。即ち、容器内に粒状体を収容しない場合の振動系の運動方程式は、容器の慣性質量をmb、力センサの慣性質量をmf、加速度センサの慣性質量をmaとすると、減衰要素とバネ要素がないので、次式(数2)のように表すことができる。
【0011】
【数2】
【0012】
したがって、動質量は、次式(数3)になる。
【0013】
【数3】
【0014】
しかし、実際の測定において、加振力の信号と加速度の信号の間には、力検出手段及び加速度検出手段として用いられるセンサやアンプ等の電気回路が異なるために位相差φが存在し、数3の式の虚部はゼロとならず、次式(数4)のようになる。
【0015】
【数4】
【0016】
数4の式は、本来、数3の式と一致すべきであるから、φ=0となるべきである。したがって、数4の式は次式(数5)となる。
【0017】
【数5】
【0018】
以上から、次式(数6)を得る。
【0019】
【数6】
【0020】
一方、容器内に粒状体を収容した場合の振動系の運動方程式は、粒子の慣性質量をmp、粒子の作用により得られる減衰係数をcp、虚数単位をjとすると、バネ要素がないので、次式(数7)のように書くことができる。
【0021】
【数7】
【0022】
この数7の式に、次式(数8)を代入する。
【0023】
【数8】
【0024】
そして、整理をして次式(数9)が得られる。
【0025】
【数9】
【0026】
しかし、先述したように、加振力の信号と加速度の信号の間には、力検出手段及び加速度検出手段として用いられるセンサやアンプ等の電気回路が異なるために生じる位相差φがあるので、動質量の測定結果は次式(数10)のようになる。
【0027】
【数10】
【0028】
この数10の式において、φ=0とすることにより、真の動質量を求めることができる。したがって、数4の式と数10の式より、次式(数11)が得られる。
【0029】
【数11】
【0030】
また、数9の式、数10の式、数11の式より、次式(数12)が得られる。
【0031】
【数12】
【0032】
そして、一般に制振効果を示す指標の一つとして広く用いられている損失係数ηは1ラジアンあたりに散逸されるエネルギーの全運動エネルギーに対する比として定義される。一般の運動方程式から、一周期あたりの散逸エネルギーDは次式(数13)のように求められる。
【0033】
【数13】
【0034】
また、運動エネルギーEkinは、次式(数14)である。
【0035】
【数14】
【0036】
したがって、一周期あたりの散逸エネルギーの運動エネルギー最大値に対する比(減衰能力Ψ)は、次式(数15)となる。
【0037】
【数15】
【0038】
したがって、損失係数ηは次式(数16)となる。
【0039】
【数16】
【0040】
以上により、数9の式、数12の式、数16の式から、損失係数ηが以下の式(数17)のように表される。
【0041】
【数17】
【0042】
したがって、数17の式に、振動実験により得られる容器に粒状体を収容しない状態での実際の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、振動実験により得られる容器に粒状体を収容した状態での動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesとを代入することにより、粒状体の損失係数を簡便に求めることができる。尚、数12の式より、粒状体の慣性質量を測定することなく同時に求めることができる。以上により、制振効果を一般的に且つ簡易に評価することができることがわかる。
【発明を実施するための最良の形態】
【0043】
以下、図面を参照しつつ、本発明の好適な実施形態について説明する。
【0044】
まず、本発明の実施形態による損失係数測定装置の構成を、図1に基づいて説明する。図1は、損失係数測定装置のブロック図である。
【0045】
図1に示すように、損失係数測定装置1は、容器10と、容器に収容される粒状体11と、加振装置(加振手段)20と、力センサ(力検出手段)30と、加速度センサ(加速度検出手段)32と、周波数分析(FFT)装置(係数計算手段)40と、パーソナルコンピュータ(PC)42に設けられた損失係数計算部(損失係数計算手段)41とから構成されている。
【0046】
容器10は、損失係数の測定対象である粒状体11を収容するものである。容器10及び粒状体11は、様々な形状及び材料を用いることができるが、数2の式及び数7の式が成立するために粒状体11と接触する容器10が剛とみなせる程に剛性の高い容器10とすることが望ましい。
【0047】
加振装置20は、加振信号発生及び振動制御装置21と、加振機22と、加振台23とから構成される。加振信号発生及び振動制御装置21により入力された加振信号に基づいて、加振機22の振動が制御される。加振機22は、油圧や電動で振動する。そして、加振機22に取り付けられた加振台23上の容器10が振動される。即ち、加振信号発生及び振動制御装置21により入力された加振信号に基づいて、任意の加振周波数で、容器10の変位が上下方向に振動するように制御される。尚、加振装置20は、加振信号発生及び振動制御装置21で加振周波数を変化させることができる。また、加振信号発生及び振動制御装置21は、アンプ31及びアンプ33を介して、力センサ30及び加速度センサ32からの信号を取り込み、正確に加振周波数を与えることができる。また、加振台23及び容器10に作用する加振力または加速度を一定の振幅まま加振周波数を増減可能とすることができる。粒状体11と容器10との相対運動による摩擦や、粒状体11と容器10及び粒状体11同士の衝突により、運動量変化が相乗して制振効果が発現することから、容器10に作用する加速度(加振力)の振幅によって制振効果が変化するので、加速度又は加振力の振幅を一定に保ちながら加振周波数を変化させる必要がある。
【0048】
力センサ30は、容器10に作用する加振力を検出する。そして、検出した加振力は、アンプ31を経由してFFT装置40に入力される。
【0049】
加速度センサ32は、容器10の振動加速度(以下、「加速度」と略する。)を検出する。そして、検出した加速度は、アンプ33を経由してFFT装置40に入力される。尚、容器10の加速度を検出する加速度検出手段は加速度センサ32に限らず、位置センサまたは速度センサを用い、検出した位置または速度を微分することにより加速度を検出しても良い。また、力センサ30と加速度センサ32が一体化したインピーダンスヘッドと呼ばれるセンサを用いることで、加振力と加速度とを測定しても良い。
【0050】
FFT装置40は、一般にはFFTアナライザであり、力センサ30及び加速度センサ32から、アンプ31及び/又はアンプ33を介して、加振力及び加速度の時間波形を取り込み、動質量の周波数応答における周波数ごとの実部と虚部をフーリエ変換により算出し、算出した結果をデータ通信装置40a及びデータ通信装置42aを介してPC42の損失係数計算部41に出力する。即ち、FFT装置40は、粒状体11を容器10に収容しない場合は、力センサ30及び加速度センサ32から取り込んだ加振力及び加速度から、動質量の周波数応答における周波数ごとの実部mrmesと虚部mimesをフーリエ変換により算出する。また、FFT装置40は、粒状体11を容器10に収容した場合は、力センサ30及び加速度センサ32から取り込んだ加振力及び加速度から、動質量の周波数応答における周波数ごとの実部Mrmesと虚部Mimesをフーリエ変換により算出する。尚、動質量の周波数応答における周波数ごとの実部と虚部を算出する係数計算手段は、FFT装置40に限らない。例えば、PC42に取り付けたFFTボード又はDSPボードにおいて、力センサ30及び加速度センサ32から加振力及び加速度を取り込み、動質量の周波数応答における周波数ごとの実部と虚部をフーリエ変換により算出しても良い。また、PC42に設けたプログラムである係数計算部において、力センサ30及び加速度センサ32からAD変換ボードを介して加振力及び加速度を取り込み、動質量の周波数応答における周波数ごとの実部と虚部をフーリエ変換により算出しても良い。
【0051】
損失係数計算部41は、FFT装置40からの動質量の実部及び虚部の計算結果を取り込み、上述した数1の式に従って、損失係数を算出するプログラムである。算出した損失係数の計算結果はPC42のディスプレイ等に表示する。
【0052】
尚、PC42は、損失係数計算部41における損失係数の算出と同時に、上述した数12の式に従って粒状体の慣性質量mpを計算するプログラムである慣性質量計算部(図示せず)を有してもよい。算出した粒状体の慣性質量の計算結果はPC42のディスプレイ等に表示する。
【0053】
次に、本実施の形態に係る損失係数測定装置1を用いた粒状体11の損失係数の測定方法について説明する。
【0054】
(1)事前測定ステップ
まず、容器10に粒状体11を収容しない状態で、容器10の加振力と加速度を測定し、動質量の周波数応答における周波数ごとの実部と虚部とを計算する。これは、容器10に粒状体11を収容した状態では、粒状体の質量に加えて、容器10の質量、力センサ30の質量、加速度センサ32の質量が含まれた状態での動質量となるためであり、粒状体11そのものの動質量を求める必要があるからである。
【0055】
事前測定ステップでは、容器10に粒状態11を収容しない状態で、加振装置20で容器10を上下方向に加振する。そして、加振することによって発生する容器10に作用する加振力を力センサ30で測定し、容器10の加速度を加速度センサ32で測定する。そして、測定された加振力、加速度をFFT装置40が取り込み、動質量の周波数応答における周波数ごとの実部mrmesと虚部mimesとをフーリエ変換により計算する。
【0056】
(2)本測定ステップ
本測定ステップでは、まず、容器10に測定対象となる粒状体11を収容する。そして、容器10に粒状態11を収容した状態で、加振装置20で容器10を上下方向に加振する。そして、加振することによって発生する容器10に作用する加振力を力センサ30で測定し、容器10の加速度を加速度センサ32で測定する。そして、測定された加振力、加速度をFFT装置40が取り込み、動質量の周波数応答における周波数ごとの実部Mrmesと虚部Mimesとをフーリエ変換により計算する。
【0057】
(3)損失係数計算ステップ
そして、損失係数計算ステップにおいて、事前測定ステップで計算した動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、本測定ステップで計算した動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesとを損失係数計算部41が取り込み、次式(数1)に従って損失係数を算出する。また、同時に数12の式に従って粒状体の慣性質量を算出する。尚、粒状体の慣性質量は必ずしも算出する必要はない。
【0058】
【数1】
【0059】
そして、算出した損失係数及び粒状体の慣性質量の計算結果はPC42のディスプレイ等に表示する。
【0060】
以上で説明した本実施の形態に係る損失係数測定装置1を用いて行った振動実験について、図2及び図3に基づいて説明する。図2は、損失係数と加振加速度との関係を示す実験結果である。図3は、損失係数と同時に測定される粒状体慣性質量と加振加速度との関係を示す実験結果である。尚、実験においては、容器10としてW40×H235×D100の箱状容器を用いた。また、粒状体11として還元ペレットを用い、その充填量は1.56kgとした。
【0061】
図2において、縦軸は、加振周波数が50Hz1/3オクターブバンド周波数の範囲に相当する44.5〜56Hzの範囲について測定した損失係数の平均値であり、横軸は、容器に作用する振動加速度振幅(図2では「加振加速度」と示す。単位G)である。図2に示すように、容器に作用する加振加速度が1.6Gを超えると損失係数が0.1以上になることがわかる。
【0062】
図3において、縦軸は、加振周波数が50Hz1/3オクターブバンド周波数の範囲に相当する44.5〜56Hzの範囲について測定した粒状体の慣性質量mpの平均値であり、横軸は、容器に作用する振動加速度振幅(図2では「加振加速度」と示す。単位G)である。図3に示すように、容器に作用する加振加速度が増加すると共に慣性質量が減少することがわかる。これは、跳躍する粒状体が増加することを意味する。したがって、図2及び図3から、粒状体の跳躍量に比例して損失係数が増大することと対応していることがわかる。
【0063】
本実施の形態に係る損失係数測定装置1によると、粒状体11と、粒状体11が収容される容器10との相互作用により発生する制振効果として、広く一般に用いられている粒状体11の損失係数が、数1の式に、振動実験により得られる容器に粒状体を収容しない状態での実際の動質量の周波数応答における周波数ごとの虚部mrmes及び虚部mimesと、振動実験により得られる容器に粒状体を収容した状態での動質量の周波数応答における周波数ごとの虚部Mrmes及び虚部Mimesとを代入することにより、粒状体の損失係数を簡便に求めることができる。また、数12の式より、粒状体の慣性質量を測定することなく同時に求めることができる。以上により、発振効果を一般的に且つ簡易に評価することができることがわかる。
【0064】
以上、本発明の好適な実施形態について説明したが、本発明はその趣旨を超えない範囲において変更が可能である。
【0065】
本実施の形態では、粒状体11として還元ペレットを用いたが、それに限らず、様々な材料を用いることができる。また、充填量も限定されるものではない。容器10も様々な形状及び材質のものを用いることができる。更に、加振方向は上下方向に限定されるものでなく、水平方向や斜め方向等、加振方向を自由に変更しても良い。
【図面の簡単な説明】
【0066】
【図1】損失係数測定装置のブロック図である。
【図2】損失係数と加振加速度との関係を示す実験結果である。
【図3】粒状体慣性質量と加振加速度との関係を示す実験結果である。
【符号の説明】
【0067】
1 損失係数測定装置
10 容器
11 粒状体
20 加振装置(加振手段)
21 加振信号発生及び振動制御装置
22 加振機
23 加振台
30 力センサ(力検出手段)
32 加速度センサ(加速度検出手段)
40 FFT装置(係数計算手段)
41 損失係数計算部(損失係数計算手段)
42 パーソナルコンピュータ(「PC」と略す)
【特許請求の範囲】
【請求項1】
容器に収容される粒状体の損失係数を測定する損失係数測定装置において、
前記容器を振動させる加振手段と、
前記容器に作用する加振力を検出する力検出手段と、
前記容器の振動加速度を検出する加速度検出手段と、
前記加振力及び前記振動加速度の時間波形から動質量の周波数応答における周波数ごとの実部及び虚部を計算する係数計算手段と、
前記実部及び前記虚部から損失係数を計算する損失係数計算手段と、
を有する損失係数測定装置。
【請求項2】
前記係数計算手段は、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、を計算し、
前記損失係数計算手段は、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、から、
【数1】
なる計算式を用いて損失係数ηを計算することを特徴とする請求項1に記載の損失係数測定装置。
【請求項1】
容器に収容される粒状体の損失係数を測定する損失係数測定装置において、
前記容器を振動させる加振手段と、
前記容器に作用する加振力を検出する力検出手段と、
前記容器の振動加速度を検出する加速度検出手段と、
前記加振力及び前記振動加速度の時間波形から動質量の周波数応答における周波数ごとの実部及び虚部を計算する係数計算手段と、
前記実部及び前記虚部から損失係数を計算する損失係数計算手段と、
を有する損失係数測定装置。
【請求項2】
前記係数計算手段は、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、を計算し、
前記損失係数計算手段は、前記容器に前記粒状体を収容していない場合の動質量の周波数応答における周波数ごとの実部mrmes及び虚部mimesと、前記容器に前記粒状体を収容した場合の動質量の周波数応答における周波数ごとの実部Mrmes及び虚部Mimesと、から、
【数1】
なる計算式を用いて損失係数ηを計算することを特徴とする請求項1に記載の損失係数測定装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−84371(P2006−84371A)
【公開日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願番号】特願2004−270737(P2004−270737)
【出願日】平成16年9月17日(2004.9.17)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【公開日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願日】平成16年9月17日(2004.9.17)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
[ Back to top ]