
搬送アーム装置
【課題】搬送アーム装置の提供。
【解決手段】本発明の搬送アーム装置は、動力源、動力源に駆動される伝動セット、伝動セットに駆動される可動シート及び可動シートに結合された搬送ヘッドにより構成される。軽量物品に対しては、短行程の搬送作業を行う。伝動セットは主動軸と従動軸を具え、該主動軸と従動軸は平行に設置され、主動軸は動力源により駆動され、並びに主動軸と従動軸の動力源より離れた一端よりそれぞれ主動偏心軸と従動偏心軸が延伸され、主動偏心軸と従動偏心軸はそれぞれ可動シートに枢設される。これにより、4リンク機構に類似の構造形式を構成し、可動シートにおいて円弧線運動を行う過程中に、自身の垂直度と水平度を保持できる。
【解決手段】本発明の搬送アーム装置は、動力源、動力源に駆動される伝動セット、伝動セットに駆動される可動シート及び可動シートに結合された搬送ヘッドにより構成される。軽量物品に対しては、短行程の搬送作業を行う。伝動セットは主動軸と従動軸を具え、該主動軸と従動軸は平行に設置され、主動軸は動力源により駆動され、並びに主動軸と従動軸の動力源より離れた一端よりそれぞれ主動偏心軸と従動偏心軸が延伸され、主動偏心軸と従動偏心軸はそれぞれ可動シートに枢設される。これにより、4リンク機構に類似の構造形式を構成し、可動シートにおいて円弧線運動を行う過程中に、自身の垂直度と水平度を保持できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は一種の物品自動化輸送の技術領域に係り、特に、スピーディーに軽量の物品に短行程の搬送作業を行える搬送アーム装置に関する。
【背景技術】
【0002】
電子部品は製造或いは使用の過程中に、通常、輸送機により整列、輸送され、さらに搬送アーム装置により電子部品が輸送機より逐一取り出され並びに対応する装置(例えば、検査装置、部品分類装置等)に移送された後に釈放される。このような搬送アーム装置は通常、重量の軽い電子部品(例えば、LEDチップ等)に運用され、搬送行程が短く且つスピーディーな作業に運用される。
【0003】
前述の搬送アーム装置は、通常、一つの垂直及び水平往復移動可能な吸引ノズルを具え、搬送アーム装置は先ず吸引ノズルを輸送機の送出位置に移動させ、さらに吸引ノズルで電子部品を吸い取り、その後、搬送アーム装置は吸引ノズルと部品を上に移動させ、並びに水平移動させ、さらに対応する装置まで下降させ並びに電子部品を釈放させ、その後、さらに吸引ノズルを逆方向に移動させて次の搬送作業に具え、こうして不断に往復移動することで電子部品を逐一搬送する。
【0004】
特許文献1には既に前述の搬送アーム装置に類似の構造が記載され、それは、サーボモータで回転軸を駆動して揺動アームを往復して揺動させ、揺動アームに設けられた固定軸をノズルシートに連結させ、ノズルシートは垂直状態保持装置に設置され、並びに垂直状態保持装置が水平設置された直線ガイドレール上に設置されている。
【0005】
これにより、サーボモータが作動する時、回転軸が揺動アームを駆動して揺動させ、揺動アームが固定軸を介してノズルシートを駆動して、回転軸を中心として円弧経路で移動させ、並びに水平の直線ガイドレールと垂直状態保持装置の共同作用下で、ノズルシート及び吸着ノズルが直立した状態に維持されつつ移動し、部品を吸着、移送及び釈放する。
【0006】
さらに、前述の特許中の垂直状態保持装置の実際の構造は、垂直ガイドレールと同等であり、水平設置された直線軌道は水平ガイドレールと同等であり、言い換えると、ノズルシートと吸着ノズルは揺動アームと固定軸の円弧移動経路中、垂直ガイドレールと水平ガイドレールの制限により終始直立状態に保持される。垂直ガイドレールと水平ガイドレールのノズルシート及び吸着ノズルに対する制限はまた、移動過程中の行程損失と干渉を形成し、この行程損失と干渉は高速運転の往復円弧運動中に限界を形成し得て、吸着ノズルの一次往復動作時間はこのために0.2秒が越えることができなくなる。
【0007】
したがって、前述の搬送アーム装置を改善して、運転の速度をアップして性能アップする必要がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】台湾特許公開第200535420号明細書
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の主要な目的は、上述の問題を解決する一種の電子部品搬送アーム装置を提供し、その主動軸と従動軸の主動偏心軸と従動偏心軸を可動シートに共同で連結し、可動シートが円弧線運動を行う過程で、それ自身の垂直度と水平度を保持できるようにし、これにより、行程損失と干渉を防止し、確実に運転速度をアップさせることにある。
【0010】
本発明の次の目的は、該主動軸と該従動軸の間に連動機構を設け、該主動軸と該従動軸を同期動作できるようにし、これにより可動シートに円弧線運動過程でそれ自身の垂直度と水平度を確実に保持できるようにすることにある。
【0011】
本発明の更なる目的は、ベースに、該可動シートに対応して着脱可能な校正手段を設け、該校正手段手段の異なる長さの短片、長辺を可動シートの水準時の定位に供し、常態で作動時に可動シートのプロテクタとなし、組立の便利性と使用の安全性を向上することにある。
【課題を解決するための手段】
【0012】
上述の目的を達成するため、本発明の電子部品搬送アーム装置は、動力源、動力源により駆動される伝動セット、伝動セットにより駆動される可動シート及び該可動シートに結合された搬送ヘッドにより構成される。
【0013】
該伝動セットは主動軸と従動軸を具え、且つ該主動軸と従動軸は平行設置され、該主動軸は該動力源により駆動され、並びに該主動軸と該従動軸の該動力源より離れた一端より、それぞれ主動偏心軸と従動偏心軸が突伸し、該主動偏心軸と該従動偏心軸は共同で可動シートに接続されている。
【0014】
これにより、該主動軸が回転する時、該主動偏心軸により該可動シートが駆動されて移動し、且つ該従動偏心軸と該主動偏心軸がいずれも可動シートに枢設されていることから、主動軸、従動軸、主動偏心軸、従動偏心軸及び可動シートの間に4リンク機構に類似の構造が形成され、これにより、可動シートが円弧線運動を行う過程中に、それ自身の垂直度と水平度を保持でき、並びに不必要な行程損失と干渉を防止でき、確実に動作速度をアップできる。
【0015】
以下の実施方式中に、本発明の詳細な特徴及び長所を詳細に記述しており、その内容は本発明の技術の属する分野における通常の知識を有するものが本発明の技術内容を理解し実施するのに十分であり、且つ本明細書に記載の内容、特許請求の範囲及び図面の記載に基づき、関係技術に習熟した者であれば、本発明に関係する目的及び長所を容易に理解することができる。
【発明の効果】
【0016】
本発明は、上述の問題を解決する一種の電子部品搬送アーム装置を提供し、その主動軸と従動軸の主動偏心軸と従動偏心軸を可動シートに共同で連結し、可動シートが円弧線運動を行う過程で、それ自身の垂直度と水平度を保持できるようにし、これにより、行程損失と干渉を防止し、確実に運転速度をアップさせる。
【0017】
本発明は、該主動軸と該従動軸の間に連動機構を設け、該主動軸と該従動軸を同期動作できるようにし、これにより可動シートに円弧線運動過程でそれ自身の垂直度と水平度を確実に保持できるようにする。
【0018】
本発明は、ベースに、該可動シートに対応して着脱可能な校正手段を設け、該校正手段手段の異なる長さの短片、長辺を可動シートの水準時の定位に供し、常態で作動時に可動シートのプロテクタとなし、組立の便利性と使用の安全性を向上する。
【図面の簡単な説明】
【0019】
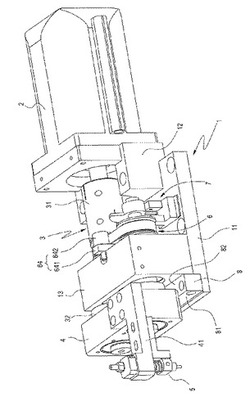
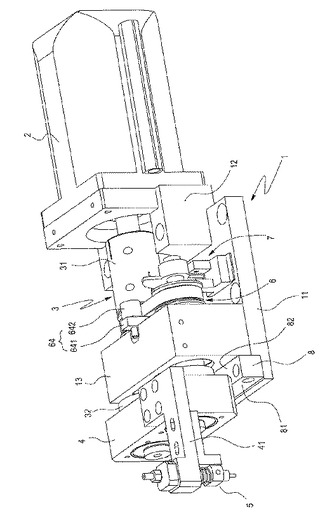
【図1】本発明の立体外観図である。
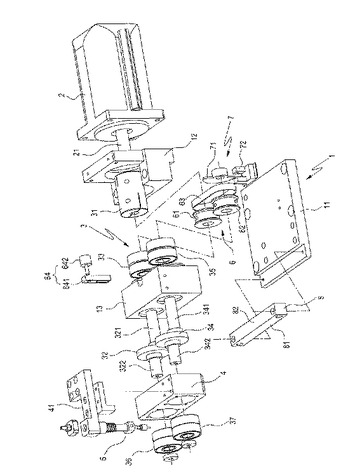
【図2】本発明の立体分解図である。
【図3】本発明の伝動セットと可動シート及び軸座の平面構造図である。
【図4】本発明の可動シートの動作表示図である。
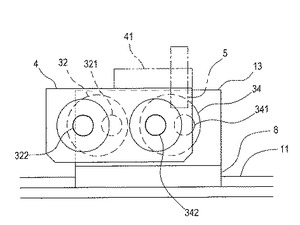
【図5】本発明の校正手段と底板及び可動シートの平面構造表示図である。
【図6】本発明の校正手段の使用状態表示図である。
【発明を実施するための形態】
【0020】
図1は本発明の立体外観図、図2は本発明の立体分解図、図3は本発明の伝動セットと可動シート及び軸座の平面構造図、図4は本発明の可動シートの動作表示図、図5は本発明の校正手段と底板及び可動シートの平面構造表示図、図6は本発明の校正手段の使用状態表示図である。
【0021】
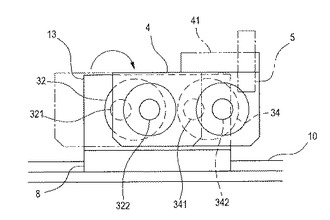
本発明の電子部品搬送アーム装置は、ベース1上に動力源、例えばサーボモータ2が設置され、並びにサーボモータ2により伝動セット3が駆動され、該伝動セット3により可動シート4が駆動されて円弧経路の移動を行う。該可動シート4には少なくとも一つの搬送ヘッド5が設けられ、該搬送ヘッド5により、物品(例えば電子部品)がピックアップ、移送、及び釈放される。
【0022】
該ベース1は底板11を具え、該底板11の一側にモータシート12が結合されて該サーボモータ2が設置され、且つ該底板11の別側に軸座13が結合され、前述の伝動セット3は該モータシート12と軸座13の間に設置される。
【0023】
該伝動セット3は軸連結器31を具え、該軸連結器31の一端はサーボモータ2の原動軸21に結合され、別端は主動偏心輪32に結合され、該主動偏心輪32の両端より主動軸321と主動偏心軸322が延伸され、該主動軸321は第1軸受セット33を介して該軸座13に設置され、且つ該主動軸321の該第1軸受セット33を突き抜けた一端は該軸連結器31と結合される。
【0024】
該軸座13に、該主動偏心輪32と平行に、従動偏心輪34が設けられ、該従動偏心輪34の両端より従動軸341と従動偏心軸342が延伸され、該従動軸341は第2軸受セット35を介して該軸座13に設置され、且つ該主動偏心軸322と該従動偏心軸342はそれぞれ第3軸受セット36と第4軸受セット37を介して該可動シート4に枢設される。これにより、該主動軸321が駆動され回転する時、該主動偏心輪32、主動偏心軸322により該可動シート4が駆動されて移動し、それと同時に該従動偏心輪34、従動軸341、従動偏心軸342も同期に作動し、これにより、該可動シート4が円弧線運動を行う過程で、それ自身の垂直度と水平度を保持できる。
【0025】
実務上、該主動偏心輪32及びそれより延伸された主動軸321と主動偏心軸322は実心剛体とされ、従動偏心輪34及びそれより延伸された従動軸341及び従動偏心軸342もまた実心剛体とされる。輪状の構造形態に設計されることで、回転時により安定する。
【0026】
さらに、該主動偏心輪32と該従動偏心輪34が確実に同期回転するようにし、両者間の非同期回転により引っ掛かりを発生する問題を防止するため、本発明は該主動偏心輪32と該従動偏心輪34の間に連動機構6を設け、該連動機構6は主動プーリ61を具え、該主動プーリ61は該主動偏心輪32の主動軸321の、該軸連結器31に近隣の一端に接続され、該従動偏心輪34の従動軸341にはそれに対応して従動プーリ62が接続され、並びに該主動プーリ61と該従動プーリ62の間にベルト63が掛けられる。実務上、該主動プーリ61、従動プーリ62、及び該ベルト63は歯車と歯付きベルトの組合せとされ得るが、これに制限されるわけではない。
【0027】
該連動機構6は別に張力調整セット64を具え、該張力調整セット64は、位置調整可能な調整架641を具え、該調整架641の上段にローラ642が枢設され、該ローラ642は該ベルト63に圧接し、これによりベルト63の張力が調整される。
【0028】
該サーボモータ2の運動を制御するため、本発明は別に検出セット7が設けられ、該検出セット7には感応素子71が設けられ、該感応素子71は該従動軸341の該従動プーリ62より突出した一端に結合され、並びに該検出セット7に該感応素子71に対応して検出素子72が設けられ、該感応素子71は扇形輪とされ、該検出素子72は光電スイッチとされ、該感応素子71が回転過程中に、間欠式に該検出素子72をトリガして信号を発生させることにより、該サーボモータ2の運転を制御する。
【0029】
前述の搬送物品がLEDチップの時、該搬送ヘッド5は真空吸引ノズルの形式とされるのがよいが、これに限定されるわけではなく、並びに、異なる搬送物品に対応し、搬送ヘッド5の構造形式は異なるものとされ得る。該搬送ヘッド5はサスペンションアームセット41の前端に設置され、該サスペンションアームセット41の別端は該可動シート4に固定される。
【0030】
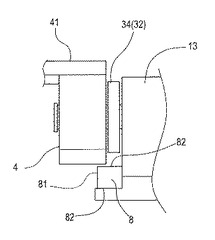
本発明は該可動シート4に対応して別に校正手段8が設けられ、該校正手段8は略長尺状とされ、着脱自在に該底板11に設置され、且つその断面は矩形を呈し、二つの短辺81と二つの長辺82を具え、図5に示されるように、該長辺82の長さは該可動シート4の起点或いは終点時の該底板11との距離に相当し、並びに常態下で該校正手段8はその長辺82が該底板11に当接する形態で設置され、該可動シート4は該校正手段8と接触しない。
【0031】
主動偏心輪32と従動偏心輪34は主動軸321と従動軸341により平行に軸座13に枢設され、並びに主動偏心軸322と従動偏心軸342もまた、それぞれ可動シート4に枢設され、これにより軸座13、主動偏心輪32、従動偏心輪34及び可動シート4の間に、平行4リンク機構に類似の構造形式が構成され、これについては図3と図4に示される態様を参照されたい。機構学上、よく見られる平行4リンク機構は、固定ロッド、第1ロッド、第2ロッド及び第3ロッドが枢設され組み合わされて一つの平行四辺形を構成し、そのうち、固定ロッドと第2ロッドが平行四辺形の二つの対辺に位置し、第1ロッドと第3ロッドが平行四辺形のその他の二つの対辺に位置する。本発明の軸座13は平行4リンク機構中の第2ロッドに相当する。主動偏心輪32の主動軸321から主動偏心軸322までの距離が4リンク原理の第1ロッドに相当する。従動偏心輪34の従動軸341から従動偏心軸342までの距離が平行4リンク機構仲の第3ロッドに相当する。
【0032】
これにより、可動シート4は駆動されて円弧線運動を行う過程中に、終始それ自身の垂直度と水平度を保持でき、可動シート4のサスペンションアームセット41前端に固定された搬送ヘッド5を運動過程中に終始直立状態に保持させることができ、これにより、搬送物品をピックアップ、移送、並びに放置することができる。
【0033】
全体機構の動作をさらに安定させるため、本発明の搬送ヘッド5の物品搬送の位置点の好ましい実施形態は、ピックアップ点と釈放点がそれぞれ4リンク機構中の二つの限界点に設計され、すなわち、該ピックアップ点と釈放点がそれぞれ主動軸321、主動偏心軸322、従動軸341、従動偏心軸342の四つの軸が同一直線上にある時の二つの限界位置点であり、すなわち、図3及び図4に示される位置であり、こうして物品のピックアップと釈放作業をさらに安定して行うことができる。
【0034】
実務上、本発明の搬送アーム装置の搬送行程は、水平方向の行程が僅かに約15mm、垂直方向の行程が僅かに約7.5mmとされ、このように小さな連接棒或いは関節を製造するのは難しい。ゆえに、本発明では、四つの軸部材(主動軸321、主動偏心軸322、従動軸341、従動偏心軸342)をそれぞれ軸受セット33、35、36、37に通すことで、4リンク機構に必要な四つの関節を実現している。こうして、軸受セットのサイズを比較的大きく製造でき、軸受セットのサイズは、主動偏心輪32上の主動軸321からその主動偏心軸322の距離より大きくすることができ、これにより容易な製造と組立の目的を達成できる。
【0035】
さらに、本発明の軸座13と主動軸321及び従動軸341の間、主動偏心軸322、、従動偏心軸342と可動シート4の間はいずれも軸受セットで回転可能に枢設された構造形式により、サーボモータ2で該可動シート4を駆動して円弧線運動させる時、従来の技術に一般的である行程損失或いは干渉が発生せず、ゆえに、本発明の構造は搬送アーム装置の運転速度をアップする。実際に測定したところによると、本発明が一回の往復動作に要する時間は僅かに約0.15秒であり、従来の技術と比較すると、約25%の速度アップを達成している。
【0036】
本発明の該主動軸321と該従動軸341の間に設置された連動機構6により、該主動軸と該従動軸が同期回転し、これにより、主動軸と従動軸の間に位置差が存在せず、可動シート4の移動過程中の垂直度と水平度が確保される。
【0037】
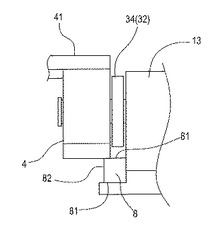
このほか、本発明の校正手段8はその断面が二つの短辺81と二つの長辺82からなる矩形構造とされ、並びに該長辺82の長さは該可動シート4の起点或いは終点と該底板11の間の距離とされ、ゆえに、可動シート4の位置を校正する必要がある時、該校正手段8のそのうち一つの短辺81を底板11に当接させ、図6に示されるようにし、このとき、可動シート4の底端が該校正手段8の別の短辺81に当接すれば、可動シート4の起点或いは終点の定位とされ、これにより、組立或いは修理時に正確な位置を提供でき、組立と修理作業に便利である。
【0038】
常態で、該校正手段8はそのうち一つの長辺82が該底板11に当接する形態で設置され、これにより該可動シート4が該校正手段8に接触せず、短辺81の長さは長辺82より短いため、常態下で校正手段8は可動シート4のプロテクタとなる。アクシデントが発生した時、可動シート4が正常な行程を超過する時、該校正手段8は該可動シート4を阻止し、可動シート4に固定された搬送ヘッド5が上方或いは下方の関係装置に衝突するのを防止する。
【0039】
以上述べたことは、本発明の、問題を解決するために採用される技術手段の好ましい実施方式或いは実施例に過ぎず、本発明の特許請求の範囲を限定するものではない。本発明の特許請求の範囲の記載に基づきなし得る、同等の変化或いは修飾は、いずれも本発明の特許請求の範囲に属するものとする。
【符号の説明】
【0040】
1 ベース 11 底板
12 モータシート 13 軸座
2 サーボモータ 21 原動軸
3 伝動セット 31 軸連結器
32 主動偏心輪 321 主動軸
322 主動偏心軸 33 第1軸受セット
34 従動偏心輪 341 従動軸
342 従動偏心軸 35 第2軸受セット
36 第3軸受セット 37 第4軸受セット
4 可動シート 41 サスペンションアームセット
5 搬送ヘッド 6 連動機構
61 主動プーリ 62 従動プーリ
63 ベルト 64 張力調整セット
641 調整架 642 ローラ
7 検出セット 71 感応素子
72 検出素子 8 校正手段
81 短辺 82 長辺
【技術分野】
【0001】
本発明は一種の物品自動化輸送の技術領域に係り、特に、スピーディーに軽量の物品に短行程の搬送作業を行える搬送アーム装置に関する。
【背景技術】
【0002】
電子部品は製造或いは使用の過程中に、通常、輸送機により整列、輸送され、さらに搬送アーム装置により電子部品が輸送機より逐一取り出され並びに対応する装置(例えば、検査装置、部品分類装置等)に移送された後に釈放される。このような搬送アーム装置は通常、重量の軽い電子部品(例えば、LEDチップ等)に運用され、搬送行程が短く且つスピーディーな作業に運用される。
【0003】
前述の搬送アーム装置は、通常、一つの垂直及び水平往復移動可能な吸引ノズルを具え、搬送アーム装置は先ず吸引ノズルを輸送機の送出位置に移動させ、さらに吸引ノズルで電子部品を吸い取り、その後、搬送アーム装置は吸引ノズルと部品を上に移動させ、並びに水平移動させ、さらに対応する装置まで下降させ並びに電子部品を釈放させ、その後、さらに吸引ノズルを逆方向に移動させて次の搬送作業に具え、こうして不断に往復移動することで電子部品を逐一搬送する。
【0004】
特許文献1には既に前述の搬送アーム装置に類似の構造が記載され、それは、サーボモータで回転軸を駆動して揺動アームを往復して揺動させ、揺動アームに設けられた固定軸をノズルシートに連結させ、ノズルシートは垂直状態保持装置に設置され、並びに垂直状態保持装置が水平設置された直線ガイドレール上に設置されている。
【0005】
これにより、サーボモータが作動する時、回転軸が揺動アームを駆動して揺動させ、揺動アームが固定軸を介してノズルシートを駆動して、回転軸を中心として円弧経路で移動させ、並びに水平の直線ガイドレールと垂直状態保持装置の共同作用下で、ノズルシート及び吸着ノズルが直立した状態に維持されつつ移動し、部品を吸着、移送及び釈放する。
【0006】
さらに、前述の特許中の垂直状態保持装置の実際の構造は、垂直ガイドレールと同等であり、水平設置された直線軌道は水平ガイドレールと同等であり、言い換えると、ノズルシートと吸着ノズルは揺動アームと固定軸の円弧移動経路中、垂直ガイドレールと水平ガイドレールの制限により終始直立状態に保持される。垂直ガイドレールと水平ガイドレールのノズルシート及び吸着ノズルに対する制限はまた、移動過程中の行程損失と干渉を形成し、この行程損失と干渉は高速運転の往復円弧運動中に限界を形成し得て、吸着ノズルの一次往復動作時間はこのために0.2秒が越えることができなくなる。
【0007】
したがって、前述の搬送アーム装置を改善して、運転の速度をアップして性能アップする必要がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】台湾特許公開第200535420号明細書
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の主要な目的は、上述の問題を解決する一種の電子部品搬送アーム装置を提供し、その主動軸と従動軸の主動偏心軸と従動偏心軸を可動シートに共同で連結し、可動シートが円弧線運動を行う過程で、それ自身の垂直度と水平度を保持できるようにし、これにより、行程損失と干渉を防止し、確実に運転速度をアップさせることにある。
【0010】
本発明の次の目的は、該主動軸と該従動軸の間に連動機構を設け、該主動軸と該従動軸を同期動作できるようにし、これにより可動シートに円弧線運動過程でそれ自身の垂直度と水平度を確実に保持できるようにすることにある。
【0011】
本発明の更なる目的は、ベースに、該可動シートに対応して着脱可能な校正手段を設け、該校正手段手段の異なる長さの短片、長辺を可動シートの水準時の定位に供し、常態で作動時に可動シートのプロテクタとなし、組立の便利性と使用の安全性を向上することにある。
【課題を解決するための手段】
【0012】
上述の目的を達成するため、本発明の電子部品搬送アーム装置は、動力源、動力源により駆動される伝動セット、伝動セットにより駆動される可動シート及び該可動シートに結合された搬送ヘッドにより構成される。
【0013】
該伝動セットは主動軸と従動軸を具え、且つ該主動軸と従動軸は平行設置され、該主動軸は該動力源により駆動され、並びに該主動軸と該従動軸の該動力源より離れた一端より、それぞれ主動偏心軸と従動偏心軸が突伸し、該主動偏心軸と該従動偏心軸は共同で可動シートに接続されている。
【0014】
これにより、該主動軸が回転する時、該主動偏心軸により該可動シートが駆動されて移動し、且つ該従動偏心軸と該主動偏心軸がいずれも可動シートに枢設されていることから、主動軸、従動軸、主動偏心軸、従動偏心軸及び可動シートの間に4リンク機構に類似の構造が形成され、これにより、可動シートが円弧線運動を行う過程中に、それ自身の垂直度と水平度を保持でき、並びに不必要な行程損失と干渉を防止でき、確実に動作速度をアップできる。
【0015】
以下の実施方式中に、本発明の詳細な特徴及び長所を詳細に記述しており、その内容は本発明の技術の属する分野における通常の知識を有するものが本発明の技術内容を理解し実施するのに十分であり、且つ本明細書に記載の内容、特許請求の範囲及び図面の記載に基づき、関係技術に習熟した者であれば、本発明に関係する目的及び長所を容易に理解することができる。
【発明の効果】
【0016】
本発明は、上述の問題を解決する一種の電子部品搬送アーム装置を提供し、その主動軸と従動軸の主動偏心軸と従動偏心軸を可動シートに共同で連結し、可動シートが円弧線運動を行う過程で、それ自身の垂直度と水平度を保持できるようにし、これにより、行程損失と干渉を防止し、確実に運転速度をアップさせる。
【0017】
本発明は、該主動軸と該従動軸の間に連動機構を設け、該主動軸と該従動軸を同期動作できるようにし、これにより可動シートに円弧線運動過程でそれ自身の垂直度と水平度を確実に保持できるようにする。
【0018】
本発明は、ベースに、該可動シートに対応して着脱可能な校正手段を設け、該校正手段手段の異なる長さの短片、長辺を可動シートの水準時の定位に供し、常態で作動時に可動シートのプロテクタとなし、組立の便利性と使用の安全性を向上する。
【図面の簡単な説明】
【0019】
【図1】本発明の立体外観図である。
【図2】本発明の立体分解図である。
【図3】本発明の伝動セットと可動シート及び軸座の平面構造図である。
【図4】本発明の可動シートの動作表示図である。
【図5】本発明の校正手段と底板及び可動シートの平面構造表示図である。
【図6】本発明の校正手段の使用状態表示図である。
【発明を実施するための形態】
【0020】
図1は本発明の立体外観図、図2は本発明の立体分解図、図3は本発明の伝動セットと可動シート及び軸座の平面構造図、図4は本発明の可動シートの動作表示図、図5は本発明の校正手段と底板及び可動シートの平面構造表示図、図6は本発明の校正手段の使用状態表示図である。
【0021】
本発明の電子部品搬送アーム装置は、ベース1上に動力源、例えばサーボモータ2が設置され、並びにサーボモータ2により伝動セット3が駆動され、該伝動セット3により可動シート4が駆動されて円弧経路の移動を行う。該可動シート4には少なくとも一つの搬送ヘッド5が設けられ、該搬送ヘッド5により、物品(例えば電子部品)がピックアップ、移送、及び釈放される。
【0022】
該ベース1は底板11を具え、該底板11の一側にモータシート12が結合されて該サーボモータ2が設置され、且つ該底板11の別側に軸座13が結合され、前述の伝動セット3は該モータシート12と軸座13の間に設置される。
【0023】
該伝動セット3は軸連結器31を具え、該軸連結器31の一端はサーボモータ2の原動軸21に結合され、別端は主動偏心輪32に結合され、該主動偏心輪32の両端より主動軸321と主動偏心軸322が延伸され、該主動軸321は第1軸受セット33を介して該軸座13に設置され、且つ該主動軸321の該第1軸受セット33を突き抜けた一端は該軸連結器31と結合される。
【0024】
該軸座13に、該主動偏心輪32と平行に、従動偏心輪34が設けられ、該従動偏心輪34の両端より従動軸341と従動偏心軸342が延伸され、該従動軸341は第2軸受セット35を介して該軸座13に設置され、且つ該主動偏心軸322と該従動偏心軸342はそれぞれ第3軸受セット36と第4軸受セット37を介して該可動シート4に枢設される。これにより、該主動軸321が駆動され回転する時、該主動偏心輪32、主動偏心軸322により該可動シート4が駆動されて移動し、それと同時に該従動偏心輪34、従動軸341、従動偏心軸342も同期に作動し、これにより、該可動シート4が円弧線運動を行う過程で、それ自身の垂直度と水平度を保持できる。
【0025】
実務上、該主動偏心輪32及びそれより延伸された主動軸321と主動偏心軸322は実心剛体とされ、従動偏心輪34及びそれより延伸された従動軸341及び従動偏心軸342もまた実心剛体とされる。輪状の構造形態に設計されることで、回転時により安定する。
【0026】
さらに、該主動偏心輪32と該従動偏心輪34が確実に同期回転するようにし、両者間の非同期回転により引っ掛かりを発生する問題を防止するため、本発明は該主動偏心輪32と該従動偏心輪34の間に連動機構6を設け、該連動機構6は主動プーリ61を具え、該主動プーリ61は該主動偏心輪32の主動軸321の、該軸連結器31に近隣の一端に接続され、該従動偏心輪34の従動軸341にはそれに対応して従動プーリ62が接続され、並びに該主動プーリ61と該従動プーリ62の間にベルト63が掛けられる。実務上、該主動プーリ61、従動プーリ62、及び該ベルト63は歯車と歯付きベルトの組合せとされ得るが、これに制限されるわけではない。
【0027】
該連動機構6は別に張力調整セット64を具え、該張力調整セット64は、位置調整可能な調整架641を具え、該調整架641の上段にローラ642が枢設され、該ローラ642は該ベルト63に圧接し、これによりベルト63の張力が調整される。
【0028】
該サーボモータ2の運動を制御するため、本発明は別に検出セット7が設けられ、該検出セット7には感応素子71が設けられ、該感応素子71は該従動軸341の該従動プーリ62より突出した一端に結合され、並びに該検出セット7に該感応素子71に対応して検出素子72が設けられ、該感応素子71は扇形輪とされ、該検出素子72は光電スイッチとされ、該感応素子71が回転過程中に、間欠式に該検出素子72をトリガして信号を発生させることにより、該サーボモータ2の運転を制御する。
【0029】
前述の搬送物品がLEDチップの時、該搬送ヘッド5は真空吸引ノズルの形式とされるのがよいが、これに限定されるわけではなく、並びに、異なる搬送物品に対応し、搬送ヘッド5の構造形式は異なるものとされ得る。該搬送ヘッド5はサスペンションアームセット41の前端に設置され、該サスペンションアームセット41の別端は該可動シート4に固定される。
【0030】
本発明は該可動シート4に対応して別に校正手段8が設けられ、該校正手段8は略長尺状とされ、着脱自在に該底板11に設置され、且つその断面は矩形を呈し、二つの短辺81と二つの長辺82を具え、図5に示されるように、該長辺82の長さは該可動シート4の起点或いは終点時の該底板11との距離に相当し、並びに常態下で該校正手段8はその長辺82が該底板11に当接する形態で設置され、該可動シート4は該校正手段8と接触しない。
【0031】
主動偏心輪32と従動偏心輪34は主動軸321と従動軸341により平行に軸座13に枢設され、並びに主動偏心軸322と従動偏心軸342もまた、それぞれ可動シート4に枢設され、これにより軸座13、主動偏心輪32、従動偏心輪34及び可動シート4の間に、平行4リンク機構に類似の構造形式が構成され、これについては図3と図4に示される態様を参照されたい。機構学上、よく見られる平行4リンク機構は、固定ロッド、第1ロッド、第2ロッド及び第3ロッドが枢設され組み合わされて一つの平行四辺形を構成し、そのうち、固定ロッドと第2ロッドが平行四辺形の二つの対辺に位置し、第1ロッドと第3ロッドが平行四辺形のその他の二つの対辺に位置する。本発明の軸座13は平行4リンク機構中の第2ロッドに相当する。主動偏心輪32の主動軸321から主動偏心軸322までの距離が4リンク原理の第1ロッドに相当する。従動偏心輪34の従動軸341から従動偏心軸342までの距離が平行4リンク機構仲の第3ロッドに相当する。
【0032】
これにより、可動シート4は駆動されて円弧線運動を行う過程中に、終始それ自身の垂直度と水平度を保持でき、可動シート4のサスペンションアームセット41前端に固定された搬送ヘッド5を運動過程中に終始直立状態に保持させることができ、これにより、搬送物品をピックアップ、移送、並びに放置することができる。
【0033】
全体機構の動作をさらに安定させるため、本発明の搬送ヘッド5の物品搬送の位置点の好ましい実施形態は、ピックアップ点と釈放点がそれぞれ4リンク機構中の二つの限界点に設計され、すなわち、該ピックアップ点と釈放点がそれぞれ主動軸321、主動偏心軸322、従動軸341、従動偏心軸342の四つの軸が同一直線上にある時の二つの限界位置点であり、すなわち、図3及び図4に示される位置であり、こうして物品のピックアップと釈放作業をさらに安定して行うことができる。
【0034】
実務上、本発明の搬送アーム装置の搬送行程は、水平方向の行程が僅かに約15mm、垂直方向の行程が僅かに約7.5mmとされ、このように小さな連接棒或いは関節を製造するのは難しい。ゆえに、本発明では、四つの軸部材(主動軸321、主動偏心軸322、従動軸341、従動偏心軸342)をそれぞれ軸受セット33、35、36、37に通すことで、4リンク機構に必要な四つの関節を実現している。こうして、軸受セットのサイズを比較的大きく製造でき、軸受セットのサイズは、主動偏心輪32上の主動軸321からその主動偏心軸322の距離より大きくすることができ、これにより容易な製造と組立の目的を達成できる。
【0035】
さらに、本発明の軸座13と主動軸321及び従動軸341の間、主動偏心軸322、、従動偏心軸342と可動シート4の間はいずれも軸受セットで回転可能に枢設された構造形式により、サーボモータ2で該可動シート4を駆動して円弧線運動させる時、従来の技術に一般的である行程損失或いは干渉が発生せず、ゆえに、本発明の構造は搬送アーム装置の運転速度をアップする。実際に測定したところによると、本発明が一回の往復動作に要する時間は僅かに約0.15秒であり、従来の技術と比較すると、約25%の速度アップを達成している。
【0036】
本発明の該主動軸321と該従動軸341の間に設置された連動機構6により、該主動軸と該従動軸が同期回転し、これにより、主動軸と従動軸の間に位置差が存在せず、可動シート4の移動過程中の垂直度と水平度が確保される。
【0037】
このほか、本発明の校正手段8はその断面が二つの短辺81と二つの長辺82からなる矩形構造とされ、並びに該長辺82の長さは該可動シート4の起点或いは終点と該底板11の間の距離とされ、ゆえに、可動シート4の位置を校正する必要がある時、該校正手段8のそのうち一つの短辺81を底板11に当接させ、図6に示されるようにし、このとき、可動シート4の底端が該校正手段8の別の短辺81に当接すれば、可動シート4の起点或いは終点の定位とされ、これにより、組立或いは修理時に正確な位置を提供でき、組立と修理作業に便利である。
【0038】
常態で、該校正手段8はそのうち一つの長辺82が該底板11に当接する形態で設置され、これにより該可動シート4が該校正手段8に接触せず、短辺81の長さは長辺82より短いため、常態下で校正手段8は可動シート4のプロテクタとなる。アクシデントが発生した時、可動シート4が正常な行程を超過する時、該校正手段8は該可動シート4を阻止し、可動シート4に固定された搬送ヘッド5が上方或いは下方の関係装置に衝突するのを防止する。
【0039】
以上述べたことは、本発明の、問題を解決するために採用される技術手段の好ましい実施方式或いは実施例に過ぎず、本発明の特許請求の範囲を限定するものではない。本発明の特許請求の範囲の記載に基づきなし得る、同等の変化或いは修飾は、いずれも本発明の特許請求の範囲に属するものとする。
【符号の説明】
【0040】
1 ベース 11 底板
12 モータシート 13 軸座
2 サーボモータ 21 原動軸
3 伝動セット 31 軸連結器
32 主動偏心輪 321 主動軸
322 主動偏心軸 33 第1軸受セット
34 従動偏心輪 341 従動軸
342 従動偏心軸 35 第2軸受セット
36 第3軸受セット 37 第4軸受セット
4 可動シート 41 サスペンションアームセット
5 搬送ヘッド 6 連動機構
61 主動プーリ 62 従動プーリ
63 ベルト 64 張力調整セット
641 調整架 642 ローラ
7 検出セット 71 感応素子
72 検出素子 8 校正手段
81 短辺 82 長辺
【特許請求の範囲】
【請求項1】
搬送アーム装置において、
動力源と、
伝動セットであって、主動軸と従動軸で構成され、且つ該主動軸は該動力源により駆動され、該主動軸の該動力源より遠く離れた一端より主動偏心軸が凸伸し、該従動軸は該主動軸に平行に設置され、且つ該従動軸より、該主動偏心軸に対応して従動偏心軸が凸伸する、上記伝動セットと、
可動シートであって、該主動偏心軸と該従動偏心軸に設置された、上記可動シートと、
搬送ヘッドであって、該可動シートに固定された該搬送ヘッドと、
を包含したことを特徴とする、搬送アーム装置。
【請求項2】
請求項1記載の搬送アーム装置において、軸座を更に具え、該軸座に該主動軸と該従動軸が設置されることを特徴とする、搬送アーム装置。
【請求項3】
請求項2記載の搬送アーム装置において、該主動軸は第1軸受セットを介して該軸座に設置され、該従動軸は第2軸受セットを介して該軸座に設置されることを特徴とする、搬送アーム装置。
【請求項4】
請求項2記載の搬送アーム装置において、更にベースを具え、該動力源は該ベースに設置され、且つ該軸座は該ベースに固定されることを特徴とする、搬送アーム装置。
【請求項5】
請求項4記載の搬送アーム装置において、更に校正手段を具え、該校正手段は着脱自在に該ベースと該可動シートの間に設置され、常態で該可動シートは該校正手段に接触せず、校正時に該可動シートが該校正手段に当接させられることで定位されることを特徴とする、搬送アーム装置。
【請求項6】
請求項5記載の搬送アーム装置において、該校正手段は略長尺状を呈して該ベースに着脱自在とされ、該校正手段の断面は矩形を呈して二つの短辺と二つの長辺を具え、該長辺の長さは該可動シートの起点又は終点時の該ベースとの間の距離に等しく、該短辺の長さは該長辺より短く、且つ常態で該校正手段はそのうち一つの該長辺が該ベースに当接する形態で設置されることを特徴とする、搬送アーム装置。
【請求項7】
請求項1記載の搬送アーム装置において、該伝動セットは軸連結器を具え、該軸連結器の一端は該動力源に接続され、別端は該主動軸に接続されることを特徴とする、搬送アーム装置。
【請求項8】
請求項1記載の搬送アーム装置において、該主動偏心軸と該従動偏心軸はそれぞれ第3軸受セットと第4軸受セットを介して該可動シートに枢設されることを特徴とする、搬送アーム装置。
【請求項9】
請求項1記載の搬送アーム装置において、該主動軸と該従動軸の間に連動機構が設けられ、該連動機構により該主動軸と該従動軸が同期に駆動されることを特徴とする、搬送アーム装置。
【請求項10】
請求項9記載の搬送アーム装置において、該連動機構は主動プーリを具え、該主動プーリは該主動軸の、該軸連結器に近隣の一端に接続され、該従動軸に、該主動プーリに対応して従動プーリが接続され、並びに該主動プーリと該従動プーリの間にベルトが掛けられたことを特徴とする、搬送アーム装置。
【請求項11】
請求項10記載の搬送アーム装置において、該主動プーリと該従動プーリが歯車とされ、該ベルトが歯付きベルトとされたことを特徴とする、搬送アーム装置。
【請求項12】
請求項10記載の搬送アーム装置において、該連動機構に更に張力調整セットが設けられ、該張力調整セットは位置調整可能な調整架を具え、該調整架の上段にローラが枢設され、該ローラが該ベルトに圧接することで、該ベルトの張力が調整されることを特徴とする、搬送アーム装置。
【請求項13】
請求項1記載の搬送アーム装置において、検出セットを更に具え、該検出セットは感応素子を具え、該感応素子は該従動軸に接続され、且つ該検出セットに、該感応素子に対応する検出素子が設けられ、該感応素子が回転過程中に間欠的に該検出素子をトリガすることで、信号を発生して該動力源の作動を制御することを特徴とする、搬送アーム装置。
【請求項14】
請求項13記載の搬送アーム装置において、該感応素子が扇形輪の形態とされ、該検出素子が光電スイッチとされたことを特徴とする、搬送アーム装置。
【請求項15】
請求項1記載の搬送アーム装置において、該搬送ヘッドが真空吸引ノズルとされたことを特徴とする、搬送アーム装置。
【請求項16】
請求項1記載の搬送アーム装置において、該搬送ヘッドはサスペンションアームセットの前端に設置され、該サスペンションアームセットの別端は該可動シートに固定されることを特徴とする、搬送アーム装置。
【請求項1】
搬送アーム装置において、
動力源と、
伝動セットであって、主動軸と従動軸で構成され、且つ該主動軸は該動力源により駆動され、該主動軸の該動力源より遠く離れた一端より主動偏心軸が凸伸し、該従動軸は該主動軸に平行に設置され、且つ該従動軸より、該主動偏心軸に対応して従動偏心軸が凸伸する、上記伝動セットと、
可動シートであって、該主動偏心軸と該従動偏心軸に設置された、上記可動シートと、
搬送ヘッドであって、該可動シートに固定された該搬送ヘッドと、
を包含したことを特徴とする、搬送アーム装置。
【請求項2】
請求項1記載の搬送アーム装置において、軸座を更に具え、該軸座に該主動軸と該従動軸が設置されることを特徴とする、搬送アーム装置。
【請求項3】
請求項2記載の搬送アーム装置において、該主動軸は第1軸受セットを介して該軸座に設置され、該従動軸は第2軸受セットを介して該軸座に設置されることを特徴とする、搬送アーム装置。
【請求項4】
請求項2記載の搬送アーム装置において、更にベースを具え、該動力源は該ベースに設置され、且つ該軸座は該ベースに固定されることを特徴とする、搬送アーム装置。
【請求項5】
請求項4記載の搬送アーム装置において、更に校正手段を具え、該校正手段は着脱自在に該ベースと該可動シートの間に設置され、常態で該可動シートは該校正手段に接触せず、校正時に該可動シートが該校正手段に当接させられることで定位されることを特徴とする、搬送アーム装置。
【請求項6】
請求項5記載の搬送アーム装置において、該校正手段は略長尺状を呈して該ベースに着脱自在とされ、該校正手段の断面は矩形を呈して二つの短辺と二つの長辺を具え、該長辺の長さは該可動シートの起点又は終点時の該ベースとの間の距離に等しく、該短辺の長さは該長辺より短く、且つ常態で該校正手段はそのうち一つの該長辺が該ベースに当接する形態で設置されることを特徴とする、搬送アーム装置。
【請求項7】
請求項1記載の搬送アーム装置において、該伝動セットは軸連結器を具え、該軸連結器の一端は該動力源に接続され、別端は該主動軸に接続されることを特徴とする、搬送アーム装置。
【請求項8】
請求項1記載の搬送アーム装置において、該主動偏心軸と該従動偏心軸はそれぞれ第3軸受セットと第4軸受セットを介して該可動シートに枢設されることを特徴とする、搬送アーム装置。
【請求項9】
請求項1記載の搬送アーム装置において、該主動軸と該従動軸の間に連動機構が設けられ、該連動機構により該主動軸と該従動軸が同期に駆動されることを特徴とする、搬送アーム装置。
【請求項10】
請求項9記載の搬送アーム装置において、該連動機構は主動プーリを具え、該主動プーリは該主動軸の、該軸連結器に近隣の一端に接続され、該従動軸に、該主動プーリに対応して従動プーリが接続され、並びに該主動プーリと該従動プーリの間にベルトが掛けられたことを特徴とする、搬送アーム装置。
【請求項11】
請求項10記載の搬送アーム装置において、該主動プーリと該従動プーリが歯車とされ、該ベルトが歯付きベルトとされたことを特徴とする、搬送アーム装置。
【請求項12】
請求項10記載の搬送アーム装置において、該連動機構に更に張力調整セットが設けられ、該張力調整セットは位置調整可能な調整架を具え、該調整架の上段にローラが枢設され、該ローラが該ベルトに圧接することで、該ベルトの張力が調整されることを特徴とする、搬送アーム装置。
【請求項13】
請求項1記載の搬送アーム装置において、検出セットを更に具え、該検出セットは感応素子を具え、該感応素子は該従動軸に接続され、且つ該検出セットに、該感応素子に対応する検出素子が設けられ、該感応素子が回転過程中に間欠的に該検出素子をトリガすることで、信号を発生して該動力源の作動を制御することを特徴とする、搬送アーム装置。
【請求項14】
請求項13記載の搬送アーム装置において、該感応素子が扇形輪の形態とされ、該検出素子が光電スイッチとされたことを特徴とする、搬送アーム装置。
【請求項15】
請求項1記載の搬送アーム装置において、該搬送ヘッドが真空吸引ノズルとされたことを特徴とする、搬送アーム装置。
【請求項16】
請求項1記載の搬送アーム装置において、該搬送ヘッドはサスペンションアームセットの前端に設置され、該サスペンションアームセットの別端は該可動シートに固定されることを特徴とする、搬送アーム装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−73877(P2011−73877A)
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願番号】特願2009−247631(P2009−247631)
【出願日】平成21年10月28日(2009.10.28)
【出願人】(509299204)旺▲しい▼科技股▲ふん▼有限公司 (1)
【Fターム(参考)】
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願日】平成21年10月28日(2009.10.28)
【出願人】(509299204)旺▲しい▼科技股▲ふん▼有限公司 (1)
【Fターム(参考)】
[ Back to top ]